
立寄施設案内システム及び立寄施設案内方法
【課題】所定の施設で車両のメンテナンスが行われている間、所定の施設の近隣の立寄施設に徒歩で立ち寄ることが可能かどうかを把握することができるようにする。
【解決手段】所定の施設で車両のメンテナンスを行う際に、メンテナンス所要時間を算出するメンテナンス所要時間算出処理手段と、施設の近隣の立寄施設を検索する立寄施設検索処理手段と、検索され、表示された立寄施設から一つの立寄施設が選択されたときに、立寄施設を設定する立寄施設設定処理手段と、立寄施設に立ち寄り、施設に戻るまでの総所要時間を算出する総所要時間算出処理手段と、総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に立ち寄ることが可能であるかどうかを通知する立寄施設通知処理手段とを有する。立寄施設に立ち寄った後、メンテナンスが行われている施設に戻るタイミングを予想することができる。
【解決手段】所定の施設で車両のメンテナンスを行う際に、メンテナンス所要時間を算出するメンテナンス所要時間算出処理手段と、施設の近隣の立寄施設を検索する立寄施設検索処理手段と、検索され、表示された立寄施設から一つの立寄施設が選択されたときに、立寄施設を設定する立寄施設設定処理手段と、立寄施設に立ち寄り、施設に戻るまでの総所要時間を算出する総所要時間算出処理手段と、総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に立ち寄ることが可能であるかどうかを通知する立寄施設通知処理手段とを有する。立寄施設に立ち寄った後、メンテナンスが行われている施設に戻るタイミングを予想することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立寄施設案内システム及び立寄施設案内方法に関するものである。
【背景技術】
【0002】
従来、車両で所定の施設に出かけ、該施設において、例えば、車両のメンテナンスが行われている間、運転者は前記施設に配設された待合室等においてメンテナンスが終了するのを待機するようになっている。
【0003】
例えば、車両でガソリンスタンドに出かけた場合、ガソリンスタンドにおいて洗車が行われている間、運転者はガソリンスタンドに配設された待合室で洗車が終了するのを待機し、車両で修理工場に出かけた場合、修理工場において車両の整備・点検が行われている間、運転者は修理工場に配設された待合室で整備・点検が終了するのを待機するようになっている。
【0004】
さらに、車両として、例えば、ハイブリッド型車両、電気自動車等の電動車両を使用し、該電動車両で、充電設備がある電気ステーション、駐車場等の施設、すなわち、充電施設に出かけた場合、該充電施設においてバッテリの充電が行われている間、運転者は充電施設に配設された待合室で充電が終了するのを待機するようになっている。
【0005】
ところが、前記充電施設においてバッテリの充電が終了するまでの時間が長い場合には、充電が終了するのを待機するのが困難になってしまう。そこで、充電が終了するまでの間、運転者が充電施設の近隣の観光施設等に立ち寄ることができるように、充電施設の情報に併せて観光施設等の立寄地点の情報を表示するようにした車両が提供されている(例えば、特許文献1参照。)。
【特許文献1】特開2006−112932号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の車両においては、単に充電施設及び近隣の立寄施設を表示するだけであるので、充電を行っている間に観光施設等に立ち寄った場合、充電が終了するまでに充電施設に帰ってくることができるかどうかを把握することができなかった。
【0007】
本発明は、前記従来の車両の問題点を解決して、所定の施設で車両のメンテナンスが行われている間、前記所定の施設の近隣の立寄施設に徒歩で立ち寄ることが可能かどうかを把握することができる立寄施設案内システム及び立寄施設案内方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
そのために、本発明の立寄施設案内システムにおいては、所定の施設で車両のメンテナンスを行う際に、メンテナンスを行うのに必要なメンテナンス所要時間を算出するメンテナンス所要時間算出処理手段と、前記メンテナンスが行われる施設の近隣の立寄施設を検索する立寄施設検索処理手段と、前記検索された立寄施設を表示する表示処理手段と、前記表示された立寄施設から一つの立寄施設が選択されたときに、選択された立寄施設を設定する立寄施設設定処理手段と、前記設定された立寄施設に立ち寄り、メンテナンスが行われる施設に戻るまでの徒歩による総所要時間を算出する総所要時間算出処理手段と、前記総所要時間とメンテナンス所要時間とを比較する比較処理手段と、前記総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかを通知する立寄施設通知処理手段とを有する。
【発明の効果】
【0009】
本発明によれば、総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかが通知されるので、立寄施設に立ち寄った後、メンテナンスが行われている施設に戻るタイミングを予想することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、車両としての電動車両、本実施の形態においては、ハイブリッド型車両を走行させ、所定の施設としての駐車場に出かけ、ハイブリッド型車両のメンテナンスとしての充電を行う場合の立寄施設案内システムについて説明する。
【0011】
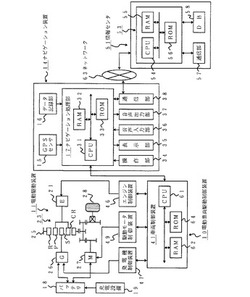
図1は本発明の実施の形態における電動車両駆動制御システムを示す図である。
【0012】
図において、10は車両駆動制御装置としての電動車両駆動制御装置、11はハイブリッド型車両を走行させるための駆動装置を構成する電動駆動装置、14は情報端末、例えば、ハイブリッド型車両に搭載された車載装置としてのナビゲーション装置、63はネットワーク、51は情報提供者としての情報センタであり、前記ナビゲーション装置14、ネットワーク63、情報センタ51等によってナビゲーションシステムが構成され、該ナビゲーションシステム、電動車両駆動制御装置10、電動駆動装置11等によって電動車両駆動制御システムが構成される。なお、該電動車両駆動制御システムによって、立寄施設を案内する立寄施設案内システムが構成される。
【0013】
前記電動駆動装置11において、21は第1の駆動源としてのエンジン(E)、23は該エンジン21から伝達された回転に対して変速を行うとともに、トルクの分配を行う差動回転装置としてのプラネタリギヤユニット、25は該プラネタリギヤユニット23における分配後のトルクが出力される出力ギヤ、26は前記プラネタリギヤユニット23と連結された第2の駆動源としての、かつ、第1の電動機械としての発電機(G)である。
【0014】
前記プラネタリギヤユニット23は、少なくとも、第1の差動要素としてのサンギヤS、該サンギヤSと噛(し)合するピニオンP、該ピニオンPと噛合する第2の差動要素としてのリングギヤR、及び前記ピニオンPを回転自在に支持する第3の差動要素としてのキャリヤCRを備え、前記サンギヤSは発電機26と、リングギヤRは第3の駆動源としての、かつ、第2の電動機械としての駆動モータ(M)27及び駆動輪28と、キャリヤCRはエンジン21と連結される。そして、前記エンジン21、発電機26及び駆動モータ27は、プラネタリギヤユニット23を介して差動回転自在に、かつ、機械的に連結されるとともに、駆動輪28と機械的に連結される。
【0015】
なお、前記キャリヤCRと電動車両駆動制御装置10の図示されないケースとの間に図示されないワンウェイクラッチが配設され、該ワンウェイクラッチは、逆方向の回転がエンジン21に伝達されないようにする。
【0016】
前記発電機26は、プラネタリギヤユニット23から伝達される回転によって電力を発生させる。そのために、前記発電機26は、充電要素としてのバッテリ18に接続され、該バッテリ18に直流の電流を供給する。また、前記発電機26において、図示されないロータと前記ケースとの間に図示されない発電機ブレーキが配設され、該発電機ブレーキを係合させることによってロータを固定し、発電機26の回転を機械的に停止させることができる。
【0017】
なお、本実施の形態においては、自宅等のように商用電源を利用することができ、所定の充電設備19を備えた施設(地点)で、深夜電力によってバッテリ18を充電することができるようになっている。そのために、充電設備19に図示されないコンセントが、ハイブリッド型車両に図示されないプラグがそれぞれ配設され、該プラグをコンセントに差し込むことによって、前記充電設備19とバッテリ18とが接続される。なお、本実施の形態においては、バッテリ18を充電するようになっているが、バッテリ18だけでなく、充電要素としてのキャパシタ等に充電することができる。
【0018】
また、前記発電機26は、図示されない発電機用インバータを介してバッテリ18に接続され、前記発電機用インバータは、バッテリ18から供給された直流の電流を交流の電流であるU相、V相及びW相の電流に変換し、発電機26に送る。それに伴って、発電機26が駆動され、発電機26のトルクである発電機トルクが発生させられる。
【0019】
そして、前記駆動モータ27は、図示されない駆動モータ用インバータを介してバッテリ18に接続され、前記駆動モータ用インバータは、バッテリ18から供給された直流の電流を、交流の電流であるU相、V相及びW相の電流に変換し、駆動モータ27に送る。それに伴って、駆動モータ27が駆動され、駆動モータ27のトルクである駆動モータトルクが発生させられる。なお、ハイブリッド型車両を制動する場合等に駆動モータ27によって回生した電力をバッテリ18に充電することができる。
【0020】
次に、前記電動駆動装置11の制御を行うための電動車両駆動制御装置10について説明する。
【0021】
該電動車両駆動制御装置10において、41はハイブリッド型車両の全体の制御を行うための車両制御装置であり、該車両制御装置41には、エンジン21の制御を行うためのエンジン制御装置46、発電機26の制御を行うための発電機制御装置47、及び駆動モータ27の制御を行うための駆動モータ制御装置49が接続されるとともに、ナビゲーション装置14のナビゲーション処理部17が接続される。
【0022】
前記車両制御装置41は、CPU61、該CPU61が各種の演算処理を行う際にワーキングメモリとして使用されるRAM62、制御用のプログラムが記録されたROM64等を備える。また、前記エンジン制御装置46、発電機制御装置47及び駆動モータ制御装置49は、図示されないCPU、RAM、ROM等から成り、それぞれ、エンジン21、発電機26及び駆動モータ27の制御を行う。
【0023】
なお、前記エンジン制御装置46、発電機制御装置47、駆動モータ制御装置49及びナビゲーション処理部17によって、車両制御装置41より下位の第1の制御装置が、前記車両制御装置41によって、エンジン制御装置46、発電機制御装置47、駆動モータ制御装置49及びナビゲーション処理部17より上位の第2の制御装置が構成される。
【0024】
前記ナビゲーション装置14は、ハイブリッド型車両の現在地を自車位置として、ハイブリッド型車両の方位を自車方位として検出する現在地検出部としてのGPSセンサ15、図示されない地図データ等の各種の情報が記録された情報記録部としてのデータ記録部16、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、操作者である運転者が操作することによって所定の入力を行うための第1の入力部としての操作部34、図示されない画面に表示された画像によって各種の表示を行い、運転者に通知するための第1の出力部としての表示部35、運転者が音声によって所定の入力を行うための第2の入力部としての音声入力部36、音声出力を行い、各種の情報を運転者に通知するための第2の出力部としての音声出力部37、及び通信端末として機能する送受信部としての通信部38を備える。また、前記ナビゲーション処理部17には、GPSセンサ15、データ記録部16、操作部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。そして、前記GPSセンサ15は、自車位置及び自車方位のほかに、時刻を検出する。なお、GPSセンサ15とは別に、方位センサを配設することによって自車方位を検出することができる。
【0025】
前記データ記録部16は、地図データファイルから成る図示されない地図データベースを備え、該地図データベースに地図データが記録される。該地図データには、交差点(分岐点)に関する交差点データ、ノードに関するノードデータ、道路リンクに関する道路データ、探索用に加工された探索データ、施設に関する施設データ等が含まれるほか、道路上の地物に関する地物データが含まれる。
【0026】
さらに、前記データ記録部16には、統計データファイルから成る図示されない統計データベース、走行履歴データファイルから成る図示されない走行履歴データベース等が形成され、前記統計データファイルに統計データが、前記走行履歴データファイルに走行履歴データが、いずれも実績データとして記録される。
【0027】
前記データ記録部16は、前記各種のデータを記録するために、ハードディスク、CD、DVD、光ディスク等の図示されないディスクを備えるほかに、各種のデータを読み出したり、書き込んだりするための読出・書込ヘッド等の図示されないヘッドを備える。また、前記データ記録部16にメモリカード等を使用することができる。なお、前記各ディスク、メモリカード等によって外部記憶装置が構成される。
【0028】
本実施の形態においては、前記データ記録部16に、前記地図データベース、統計データベース、走行履歴データベース等が形成されるようになっているが、情報センタ51において、前記地図データベース、統計データベース、走行履歴データベース等を形成することもできる。
【0029】
また、前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行う制御装置としての、かつ、演算装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM32、制御用のプログラムのほか、目的地までの経路の探索、経路案内等を行うための各種のプログラムが記録されたROM33、各種のデータ、プログラム等を記録するために使用される図示されないフラッシュメモリ等を備える。
【0030】
前記操作部34として、表示部35とは別に配設された図示されないキーボード、マウス等を使用することができる。また、前記操作部34として、前記表示部35に形成された画面に画像で表示された各種のキー、スイッチ、ボタン等の画像操作部をタッチ又はクリックすることによって、所定の入力操作を行うことができるようにしたタッチパネルを使用することができる。
【0031】
また、前記表示部35としてディスプレイが使用され、自車位置、自車方位等を表示したり、地図、探索経路、該探索経路に沿った案内情報、交通情報等を表示したり、探索経路における次の交差点までの距離、次の交差点における進行方向を表示したりすることができる。
【0032】
そして、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、前記探索経路の経路案内を音声出力によって行うことができる。
【0033】
前記通信部38は、VICS(登録商標:Vehicle Information and Communication System)センタ等の道路交通情報センタから送信された現況の交通情報、一般情報等の各種の情報を受信するための図示されないビーコンレシーバ、FM放送局を介してFM多重放送として受信するための図示されないFM受信機等を備える。そして、通信部38は、前記情報センタ51から、交通情報、一般情報等の各種の情報のほかに、前記地図データ、統計データ、走行履歴データ等のデータをネットワーク63を介して受信することができる。
【0034】
そのために、前記情報センタ51は、サーバ53、通信部57、情報記録部としてのデータベース(DB)58等を備え、前記サーバ53は、CPU54、RAM55、ROM56等を備える。また、前記データベース58には、前記データ記録部16に記録された各種のデータと同様のデータが記録される。
【0035】
なお、前記電動車両駆動制御システム、電動車両駆動制御装置10、エンジン制御装置46、発電機制御装置47、駆動モータ制御装置49、ナビゲーションシステム、ナビゲーション処理部17、サーバ53、CPU31、54、61等は、単独で、又は二つ以上組み合わせることによってコンピュータとして機能し、各種のプログラム、データ等に基づいて演算処理を行う。
【0036】
前記データ記録部16、RAM32、55、62、ROM33、56、64、フラッシュメモリ等によって記録装置及び記録媒体が構成される。また、CPU31、54、61等によって演算装置が構成される。そして、演算装置として、前記CPU31、54、61に代えてMPU等を使用することもできる。
【0037】
次に、前記ナビゲーション装置14の基本動作について説明する。
【0038】
まず、運転者によって操作部34が操作され、ナビゲーション装置14が起動されると、CPU31の図示されない現在地読込処理手段は、現在地読込処理を行い、GPSセンサ15によって検出された自車位置及び自車方位を読み込む。次に、前記CPU31の図示されない自車位置算出処理手段は、自車位置算出処理(マッチング処理)を行い、読み込まれた自車位置の軌跡、及び自車位置の周辺の道路を構成する各道路リンクの形状、配列等の情報に基づいて、自車位置がいずれの道路リンク上に位置するかの判定を行うことによって、自車位置を算出し、特定する。
【0039】
続いて、CPU31の図示されない基本情報取得処理手段は、基本情報取得処理を行い、前記地図データを、データ記録部16から読み出して取得するか、又は通信部38を介して情報センタ51等から受信して取得する。なお、地図データを情報センタ51等から取得する場合、前記基本情報取得処理手段は、受信した地図データをフラッシュメモリにダウンロードする。
【0040】
そして、前記CPU31の図示されない表示処理手段は、表示処理を行い、前記表示部35に各種の画面を形成する。例えば、表示処理手段の地図表示処理手段は、地図表示処理を行い、表示部35に地図画面を形成し、該地図画面に周囲の地図を表示するとともに、自車位置及び自車方位を表示する。
【0041】
したがって、運転者は、前記地図データ、自車位置及び自車方位の表示に従って車両を走行させることができる。
【0042】
また、運転者が操作部34を操作して目的地を入力すると、CPU31の図示されない目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。なお、本実施の形態においては、操作部34を操作して目的地を入力する代わりに、運転者が電子手帳、パソコン等の図示されない端末装置を使用して、ハイブリッド型車両を走行させる予定を表す行動スケジュールを入力するようになっている。そのために、ナビゲーション装置14は、電子手帳等を接続するための図示されないコネクタ、パソコンとの間でデータの送受信を行うための通信部38等を備える。
【0043】
前記行動スケジュールは、各日付における出発地、目的地、出発地における出発予定時間、目的地における到着予定時間等から成る。
【0044】
続いて、前記ナビゲーション装置14において、前記CPU31の図示されない行動スケジュール取得処理手段は、行動スケジュール取得処理を行い、ハイブリッド型車両が走行を開始する前に、端末装置から入力された行動スケジュールを読み込むことによって取得し、最初の出発地である自宅から出発し、各目的地に立ち寄り、最後の目的地である自宅に帰るまでの行動スケジュールを目的地スケジュールとして設定する。
【0045】
このようにして、目的地スケジュール等が設定され、必要に応じて、運転者が操作部34を操作して探索条件を入力すると、CPU31の図示されない探索処理手段は、探索処理を行い、前記自車位置、目的地スケジュール等を読み込むとともに、データ記録部16から、探索データ、施設データのうちの充電設備を備えた駐車場、電気ステーション等の充電施設のデータ(以下「充電施設データ」という。)等を読み出し、自車位置、目的地、探索データ、充電施設データ等に基づいて、目的地スケジュールにおける最初の出発地から最後の目的地までの探索経路を前記探索条件で探索して、経路データを出力する。
【0046】
なお、前記探索経路は、目的地スケジュールにおける各出発地から各目的地までの経路の集まりから成る。また、経路データは、探索経路を表すデータのほかに、探索経路上の探索された充電施設を表すデータから成る。そして、前記探索処理においては、各道路リンクごとに付与されたリンクコストの合計が最も小さい経路が探索される。
【0047】
本実施の形態においては、CPU31において探索処理を行うようになっているが、前記情報センタ51において探索処理を行うこともできる。
【0048】
続いて、前記CPU31の図示されない案内処理手段は、案内処理及び経路案内を行う。そのために、前記案内処理手段の経路表示処理手段は、経路表示処理を行い、前記経路データを読み込み、該経路データに従って前記地図画面に探索経路を表示する。
【0049】
ところで、前記発電機26及び駆動モータ27は、バッテリ18から供給された電流に基づいて駆動されるようになっている。この場合、公害、省エネルギー等の観点から、バッテリ18に充電された電力は、次回の充電までに使い切ることが望ましい。ところが、ハイブリッド型車両を走行させている間に電力を使い切ると、HV走行モードであるにもかかわらず、エンジン21だけを駆動してハイブリッド型車両を走行させることになり、その場合、公害、省エネルギー等の観点から好ましくないだけでなく、ハイブリッド型車両を走行させるために必要な車両要求トルクを十分に発生させることができなくなってしまう。
【0050】
そこで、本実施の形態においては、ナビゲーション装置14において、前記探索データに基づいて、前記充電施設を充電予定地とし、充電が可能な各出発地から充電予定地までの間の経路上の各地点における望ましいバッテリ残量SOCを、バッテリ残量SOCの目標値、すなわち、目標充電容量としての目標バッテリ残量SOC* として算出するようにしている。
【0051】
そのために、CPU31の充電スケジュール設定処理手段としての図示されないエルネギー制御判定処理手段は、充電スケジュール設定処理としてのエルネギー制御判定処理を行い、最初の出発地における充電容量としてのバッテリ残量SOC、充電可能な出発地から充電予定地までの距離、各充電予定地において再び出発するまでの、充電に費やすことができる時間、すなわち、充電充当時間、バッテリ18を満充電するのに必要な時間、すなわち、充電所要時間等の充電条件を読み込み、該充電条件に基づいて、充電可能な出発地を出発してからの走行距離を算出し、次の充電予定地に到着したときのバッテリ残量SOCが0〔%〕になるように、各地点における目標バッテリ残量SOC* を算出し、各地点ごとの目標バッテリ残量SOC* から成る充電スケジュールを設定する。
【0052】
なお、前記充電予定地によって、メンテナンスを行う予定の施設、すなわち、メンテナンス予定地が構成され、前記充電充当時間によって、各メンテナンス予定地において再び出発するまでの、メンテナンスに費やすことができる時間、すなわち、メンテナンス充電充当時間が構成され、充電所要時間によって、メンテナンスを行うのに必要な時間、すなわち、メンテナンス所要時間が構成される。
【0053】
ここで、前記バッテリ残量SOCは、バッテリ18の容量に対して実際にバッテリ18に充電されている電荷量の割合を表す値であり、充電残量を構成する。バッテリ18が完全に充電され、バッテリ18の容量に対して実際にバッテリ18に充電されている電荷量の割合が100〔%〕である場合、バッテリ残量SOCは100〔%〕であり、バッテリ18は満充電されたという。
【0054】
バッテリ残量SOCを算出するために、バッテリ18には、バッテリ電圧を検出する図示されない電圧検出部としてのバッテリ電圧センサ、及びバッテリ電流を検出する図示されない電流検出部としてのバッテリ電流センサが配設され、前記バッテリ電圧センサのセンサ出力及びバッテリ電流センサのセンサ出力が車両制御装置41に供給されるようになっている。そして、該車両制御装置41の充電残量算出処理手段としての図示されないバッテリ残量算出処理手段は、充電残量算出処理としてのバッテリ残量算出処理を行い、バッテリ残量SOCを算出する。
【0055】
この場合、最初の出発地及び最終の目的地は自宅とし、自宅を出発する際のバッテリ18は満充電されていて、バッテリ残量SOCは100〔%〕であるとし、自宅に到着したときのバッテリ残量SOCは0〔%〕であるとする。そして、各充電予定地に到着したときのバッテリ残量SOCもほぼ0〔%〕とし、前記各充電予定地で充電を行うものとする。また、各充電予定地における充電充当時間が充電所要時間より短い場合、各充電予定地に到着したときに充電を開始し、出発するときに充電を終了するものとする。この場合、バッテリ残量SOCは100〔%〕にならないまま、次の目的地に向かうことになる。
【0056】
なお、前記バッテリ残量SOCは、物理的に100〔%〕になったり、0〔%〕になったりすることを指すわけではなく、バッテリ18を繰り返し経済的に使用し得る最も高いバッテリ残量、及び最も低いバッテリ残量をいう。また、バッテリ残量SOCは、バッテリ18の性能、材質等によって異なり、例えば、アルカリ電池の場合には、きわめて低い値になるまで使用することができるが、鉛電池の場合には、過剰に低い値まで使用すると寿命を短くするので、所定の容量を残した状態をバッテリ残量SOCが0〔%〕であるとする。
【0057】
前述されたように、充電スケジュールが設定されると、CPU31の図示されない駆動制御指示処理手段は、駆動制御指示処理を行い、前記エルネギー制御判定処理における判定結果である充電スケジュールを電動車両駆動制御装置10に通知し、電動駆動装置11の駆動を指示する。
【0058】
続いて、電動車両駆動制御装置10において、CPU61の図示されない駆動制御処理手段は、駆動制御処理を行い、前記充電スケジュールに基づいて電動駆動装置11を駆動する。
【0059】
次に、前記駆動制御処理手段の動作について説明する。
【0060】
まず、前記駆動制御処理手段の駆動条件取得処理手段は、駆動条件取得処理を行い、図示されないアクセルペダルに配設されたアクセルスイッチからアクセルペダルの位置、すなわち、アクセルペダル位置を、図示されないブレーキペダルに配設されたブレーキスイッチからブレーキペダルの位置、すなわち、ブレーキペダル位置を読み込むとともに、前記駆動モータ27に配設された位置検出部としての図示されないロータ位置センサ(レゾルバ等)からロータ位置を読み込み、該ロータ位置に基づいて走行条件としての車速を算出する。この場合、アクセルスイッチ及びブレーキスイッチは、運転操作量検出部として機能し、ロータ位置センサは車速検出部として機能する。なお、前記車速は、出力ギヤ25に車速検出部としての速度センサを配設し、該速度センサによって検出することもできる。
【0061】
続いて、前記駆動制御処理手段の車両要求トルク算出処理手段は、車両要求トルク算出処理を行い、前記アクセルペダル位置、ブレーキペダル位置及び車速に基づいて、ハイブリッド型車両を走行させるのに必要な車両要求トルクTO* を算出する。
【0062】
次に、前記駆動制御処理手段の車両要求トルク判定処理手段は、車両要求トルク判定処理を行い、車両要求トルクTO* が駆動モータ27の定格としてあらかじめ設定されている最大の駆動モータトルク、すなわち、駆動モータ最大トルクより大きいかどうかを判断する。そして、車両要求トルクTO* が駆動モータ最大トルクより大きい場合、前記駆動制御処理手段の急加速制御処理手段は、急加速制御処理を行い、前記エンジン21が停止中であるかどうかを判断し、エンジン21が停止中である場合、発電機26及び駆動モータ27を駆動してハイブリッド型車両をEV走行モードで走行させる。
【0063】
また、車両要求トルクTO* が駆動モータ最大トルク以下である場合、及び車両要求トルクTO* が駆動モータ最大トルクより大きく、かつ、エンジン21が停止中でない場合、前記駆動制御処理手段の運転者要求出力算出処理手段は、運転者要求出力算出処理を行い、前記車両要求トルクTO* と車速とを乗算することによって、運転者要求出力PDを算出する。そして、前記駆動制御処理手段のバッテリ充放電要求出力算出処理手段は、バッテリ充放電要求出力算出処理を行い、ナビゲーション装置14から充電スケジュールを読み込むとともに、前記バッテリ残量SOCを読み込み、現在のバッテリ残量SOCを前記充電スケジュールの目標バッテリ残量SOC* に近づけるように充放電要求出力としてのバッテリ充放電要求出力LSOCを算出する。続いて、前記駆動制御処理手段の車両要求出力算出処理手段は、車両要求出力算出処理を行い、前記運転者要求出力PDとバッテリ充放電要求出力LSOCとを加算することによって、車両要求出力POを算出する。
【0064】
次に、前記駆動制御処理手段のエンジン目標運転状態設定処理手段は、エンジン目標運転状態設定処理を行い、前記ROM64に記録されたエンジン目標運転状態マップを参照し、前記車両要求出力PO、アクセルペダル位置等に基づいて、エンジン21の効率が最も高くなる最適燃費曲線上の運転ポイントを決定し、該運転ポイントにおけるエンジン21のトルク、すなわち、エンジントルクTEを、エンジントルクTEの目標値を表すエンジン目標トルクTE* として決定し、前記運転ポイントにおけるエンジンの回転速度、すなわち、エンジン回転速度NEを、エンジン回転速度NEの目標値を表すエンジン目標回転速度NE* として決定し、該エンジン目標回転速度NE* をエンジン制御装置46に送る。
【0065】
該エンジン制御装置46は、エンジン制御装置46の記録装置としてのROMに記録されたエンジン駆動領域マップを参照して、車速、バッテリ残量SOC及び車両要求トルクTO* に基づいて、電動駆動装置11がエンジン21を駆動するための駆動領域に置かれているかどうかを判断する。この場合、バッテリ残量SOCが大きいほど駆動領域が狭くされ、バッテリ残量SOCが小さいほど駆動領域が広くされる。
【0066】
また、エンジン21が駆動領域に置かれているにもかかわらず、エンジン21が駆動されていない場合、エンジン制御装置46の図示されないエンジン制御処理手段は、エンジン制御処理を行い、エンジン21を始動させ、ハイブリッド型車両をHV走行モードで走行させる。また、エンジン21が駆動領域に置かれていないにもかかわらず、エンジン21が駆動されている場合、前記エンジン制御処理手段は、エンジン21の駆動を停止させ、ハイブリッド型車両をEV走行モードで走行させる。
【0067】
そして、前記エンジン21が駆動領域に置かれておらず、エンジン21が駆動されていない場合、前記駆動制御処理手段の駆動モータ目標トルク算出処理手段は、駆動モータ目標トルク算出処理を行い、前記車両要求トルクTO* を、目標となる駆動モータトルクTMの目標値を表す駆動モータ目標トルクTM* として算出し、該駆動モータ目標トルクTM* を駆動モータ制御装置49に送る。この場合、該駆動モータ制御装置49の図示されない電動機械制御処理手段としての駆動モータ制御処理手段は、電動機械制御処理手段としての駆動モータ制御処理を行い、駆動モータ27のトルク制御を行う。
【0068】
また、前記エンジン21が駆動領域に置かれていて、かつ、エンジン21が駆動されている場合、前記エンジン制御処理手段は、所定の方法でエンジン21の制御を行う。
【0069】
次に、発電機制御装置47の図示されない発電機目標回転速度算出処理手段は、発電機目標回転速度算出処理を行う。すなわち、発電機目標回転速度算出処理手段は、前記ロータ位置センサからロータ位置を読み込み、該ロータ位置に基づいてリングギヤRの回転速度を算出するとともに、エンジン目標回転速度NE* を読み込み、リングギヤRの回転速度及びエンジン目標回転速度NE* に基づいて、前記プラネタリギヤユニット23におけるサンギヤS、ピニオンP及びリングギヤRの歯数比で表される回転速度関係式によって、エンジン目標回転速度NE* に対応する発電機26の回転速度、すなわち、発電機回転速度NGの目標値を表す発電機目標回転速度NG* を算出する。
【0070】
ところで、前記構成のハイブリッド型車両をエンジン21及び駆動モータ27を駆動し、HV走行モードで走行させているときに、発電機回転速度NGが低い場合、消費電力が大きくなり、発電機26の発電効率が低くなるとともに、ハイブリッド型車両の燃費がその分悪くなってしまう。そこで、発電機回転速度NGが低い場合、発電機ブレーキを係合させ、発電機26を機械的に停止させ、燃費を良くするようにしている。
【0071】
そして、発電機トルクTGの目標値を表す発電機目標トルクTG* が決定されると、発電機制御装置47において前記発電機目標トルクTG* に基づいて発電機26のトルク制御が行われ、所定の発電機トルクTGが発生させられると、エンジントルクTE、リングギヤRのトルク、すなわち、リングギヤトルク及び発電機トルクTGは互いに反力を受け合うので、発電機トルクTGがリングギヤトルクに変換されてリングギヤRから出力される。このとき、リングギヤトルクがリングギヤRから出力されるのに伴って、発電機回転速度NGが変動し、前記リングギヤトルクが変動すると、変動したリングギヤトルクが駆動輪28に伝達され、ハイブリッド型車両の走行フィーリングが低下してしまう。
【0072】
そこで、前記駆動モータ目標トルク算出処理手段は、発電機回転速度NGの変動に伴う発電機26のイナーシャ分のトルクを見込んでリングギヤトルクを算出し、該リングギヤトルクに基づいて駆動モータ27の出力軸におけるトルク、すなわち、駆動軸トルクを推定し、前記車両要求トルクTO* から駆動軸トルクを減算することによって、駆動軸トルクでは過不足する分を前記駆動モータ目標トルクTM* として算出する。
【0073】
このように、本実施の形態においては、前記充電スケジュール、アクセルペダル位置、ブレーキペダル位置、車速、バッテリ残量SOC等の駆動条件に応じて、エンジン21を停止させ、発電機26及び駆動モータ27を駆動するか、エンジン21及び発電機26を停止させ、駆動モータ27だけを駆動してハイブリッド型車両をEV走行モードで走行させたり、エンジン21及び駆動モータ27を駆動し、発電機26を反力を受けるために駆動するか、エンジン21及び駆動モータ27を駆動し、発電機26を機械的に停止させるかして、ハイブリッド型車両をHV走行モードで走行させたりするようになっている。
【0074】
ところで、所定の充電施設、例えば、駐車場が充電予定地とされた場合、前記駐車場で充電が行われている間、運転者が駐車場の近隣の施設に立ち寄ることができるように、施設が案内されるようになっている。
【0075】
そのために、前記CPU31の図示されない立寄案内処理手段は、立寄案内処理を行い、立寄施設を検索し、運転者に案内する。
【0076】
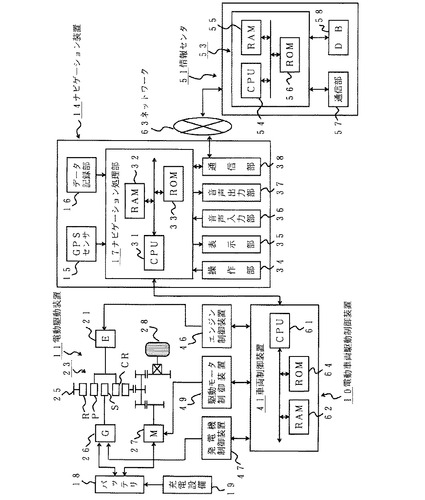
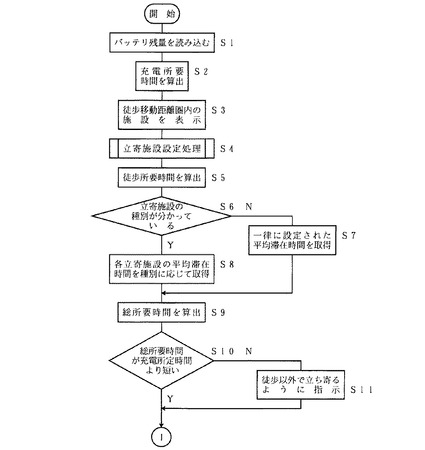
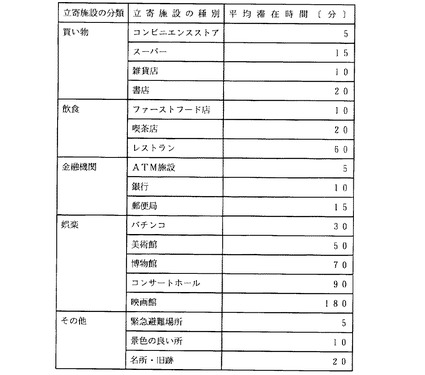
図2は本発明の実施の形態における立寄案内処理手段の動作を示す第1のフローチャート、図3は本発明の実施の形態における立寄案内処理手段の動作を示す第2のフローチャート、図4は本発明の実施の形態における平均滞在時間マップ、図5は本発明の実施の形態における視聴所要時間マップである。
【0077】
まず、前記立寄案内処理手段のメンテナンス所要時間算出処理手段としての充電所要時間算出処理手段は、メンテナンス所要時間算出処理としての充電所要時間算出処理を行い、車両が駐車場に到着すると、バッテリ残量SOCを読み込み、駐車場の充電設備によって充電を行うに当たり、前記バッテリ残量SOCに基づいて充電所要時間を算出し、前記表示処理手段は、充電所要時間を表示部35(図1)に表示する。
【0078】
また、前記立寄案内処理手段の立寄施設検索処理手段は、立寄施設検索処理を行い、施設データを読み出し、運転者が駐車場から徒歩で移動することができる距離(本実施の形態においては、1000〔m〕)の範囲内、すなわち、徒歩移動距離圏内の施設を立寄施設として検索し、前記表示処理手段は、立寄施設検索処理において検索された立寄施設をリストにして前記表示部35に表示するとともに、表示部35に表示された地図上に立寄施設を表すマークを表示する。
【0079】
そして、運転者が、前記操作部34を操作することによって、表示されたリスト又は立寄施設を表すマークが表示された地図上から一つの立寄施設を選択すると、前記立寄案内処理手段の立寄施設設定処理手段は、立寄施設設定処理を行い、選択された立寄施設を設定する。続いて、前記探索処理手段は、駐車場を出発地とし、選択された立寄施設を目的地として経路を探索し、探索された経路を立寄経路とする。
【0080】
次に、前記立寄案内処理手段の総所要時間算出処理手段は、総所要時間算出処理を行い、駐車場から立寄施設まで運転者が徒歩で移動するのに必要な時間、すなわち、移動時間としての徒歩所要時間を立寄経路に基づいて算出する。続いて、前記総所要時間算出処理手段は、立寄施設の種別が分かっているかどうかを判断する。施設の種別が分かっている場合、前記総所要時間算出処理手段は、ROM33に設定された図4に示されるような平均滞在時間マップを参照し、各立寄施設の平均滞在時間を種別に応じて読み出して取得する。一方、施設の種別が分かっていない場合、前記総所要時間算出処理手段は、一律に設定され、例えば、CPU31の図示されないバッファに記録された標準的な平均滞在時間(以下「標準滞在時間」という。)を読み出して取得する。本実施の形態において、標準滞在時間はバッファに記録されるようになっているが、前記平均滞在時間マップの所定の領域に、種別ごとの平均滞在時間とは別に記録することができる。なお、前記平均滞在時間マップには、立寄施設の分類ごとに立寄施設の種別が分けられ、各立寄施設の種別に対応させて平均滞在時間が記録される。
【0081】
続いて、前記総所要時間算出処理手段は、前記徒歩所要時間を2倍することによって、駐車場から選択された立寄施設までの往復の所要時間を算出し、算出された往復の所要時間に平均滞在時間を加算することによって、駐車場から選択された立寄施設に立ち寄り、平均滞在時間だけ選択された立寄施設に滞在した後、選択された立寄施設から駐車場に戻るまでの徒歩による総所要時間を算出する。
【0082】
次に、前記立寄案内処理手段の比較処理手段は、比較処理を行い、前記総所要時間と充電所要時間とを比較し、総所要時間が充電所要時間より短いかどうかを判断し、前記表示処理手段は、選択された立寄施設に徒歩で立ち寄ることが可能であるかどうかを表示部35にメッセージで表示する。
【0083】
すなわち、総所要時間が充電所要時間より短い場合、前記表示処理手段は、選択された立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示する。このとき、前記表示処理手段は、徒歩所要時間、平均滞在時間、滞在可能時間等を地図上に併せて表示する。また、総所要時間が充電所要時間より長い場合、前記表示処理手段は、前記選択された立寄施設に徒歩以外の移動手段、例えば、車両で、充電終了後に立ち寄るように指示する旨のメッセージを表示する。総所要時間が充電所要時間より長い場合、前記表示処理手段は、選択された立寄施設に徒歩で立ち寄ることができない旨のメッセージを表示することもできる。
【0084】
なお、本実施の形態において、前記比較処理手段は、総所要時間が充電所要時間より短いかどうかを判断し、総所要時間が充電所要時間より短い場合、前記表示処理手段は、前記立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示するようになっているが、あらかじめ運転者が許容時間を設定した場合には、総所要時間が充電所要時間より設定された許容時間だけ長くても、前記表示処理手段は、前記立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示する。
【0085】
そして、前記立寄案内処理手段のメンテナンス終了判断処理手段としての充電終了判断処理手段は、メンテナンス終了判断処理としての充電終了判断処理を行い、充電が終了したかどうかを判断する。充電が終了すると、前記立寄案内処理手段のメンテナンス終了通知処理手段としての充電終了通知処理手段は、メンテナンス終了通知処理としての充電終了通知処理を行い、運転者に充電が終了した旨を、通信装置としての、かつ、通信端末としての携帯電話にメール等で通知する。
【0086】
このように、本実施の形態においては、総所要時間が充電所要時間より短い場合に、立寄施設に立ち寄ることが可能である旨のメッセージが表示されるので、立寄施設に立ち寄った場合、立寄施設から駐車場に戻るタイミングを予想することができる。
【0087】
次に、フローチャートについて説明する。
ステップS1 バッテリ残量SOCを読み込む。
ステップS2 充電所要時間を算出する。
ステップS3 徒歩移動距離圏内の施設を表示する。
ステップS4 立寄施設設定処理を行う。
ステップS5 徒歩所要時間を算出する。
ステップS6 立寄施設の種別が分かっているかどうかを判断する。立寄施設の種別が分かっている場合はステップS8に、分かっていない場合はステップS7に進む。
ステップS7 一律に設定された平均滞在時間を取得してステップS9に進む。
ステップS8 各立寄施設の平均滞在時間を立寄施設の種別に応じて取得する。
ステップS9 総所要時間を算出する。
ステップS10 総所要時間が充電所定時間より短いかどうかを判断する。総所要時間が充電所定時間より短い場合はステップS12に、総所要時間が充電所定時間より長い場合はステップS11に進む。
ステップS11 徒歩以外で立ち寄るように指示する旨のメッセージを表示する。
ステップS12 立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示する。
ステップS13 充電が終了するのを待機し、充電が終了するとステップS14に進む。
ステップS14 充電終了を通知し、処理を終了する。
【0088】
本実施の形態においては、前記平均滞在時間マップ及び視聴所要時間マップはROM33に設定されているが、情報センタ51のデータベース58に設定することもできる。
【0089】
また、前記表示処理手段は、総所要時間が充電所要時間より短い立寄施設を地図上に表示するようになっているが、運転者があらかじめ立寄施設の分類等を登録しておくと、表示処理手段は、総所要時間が充電所要時間より短い立寄施設のうちの登録された分類等の立寄施設を選択し、表示することができる。
【0090】
そして、情報センタ51から駐車場の近隣の施設のイベント情報(ディスカウントセール、コンサート、飲食店のランチ時間等)を配信し、該イベント情報を表示部35に表示することができる。
【0091】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0092】
【図1】本発明の実施の形態における電動車両駆動制御システムを示す図である。
【図2】本発明の実施の形態における立寄案内処理手段の動作を示す第1のフローチャートである。
【図3】本発明の実施の形態における立寄案内処理手段の動作を示す第2のフローチャートである。
【図4】本発明の実施の形態における平均滞在時間マップである。
【符号の説明】
【0093】
10 電動車両駆動制御装置
11 電動駆動装置
14 ナビゲーション装置
31 CPU
51 情報センタ
63 ネットワーク
【技術分野】
【0001】
本発明は、立寄施設案内システム及び立寄施設案内方法に関するものである。
【背景技術】
【0002】
従来、車両で所定の施設に出かけ、該施設において、例えば、車両のメンテナンスが行われている間、運転者は前記施設に配設された待合室等においてメンテナンスが終了するのを待機するようになっている。
【0003】
例えば、車両でガソリンスタンドに出かけた場合、ガソリンスタンドにおいて洗車が行われている間、運転者はガソリンスタンドに配設された待合室で洗車が終了するのを待機し、車両で修理工場に出かけた場合、修理工場において車両の整備・点検が行われている間、運転者は修理工場に配設された待合室で整備・点検が終了するのを待機するようになっている。
【0004】
さらに、車両として、例えば、ハイブリッド型車両、電気自動車等の電動車両を使用し、該電動車両で、充電設備がある電気ステーション、駐車場等の施設、すなわち、充電施設に出かけた場合、該充電施設においてバッテリの充電が行われている間、運転者は充電施設に配設された待合室で充電が終了するのを待機するようになっている。
【0005】
ところが、前記充電施設においてバッテリの充電が終了するまでの時間が長い場合には、充電が終了するのを待機するのが困難になってしまう。そこで、充電が終了するまでの間、運転者が充電施設の近隣の観光施設等に立ち寄ることができるように、充電施設の情報に併せて観光施設等の立寄地点の情報を表示するようにした車両が提供されている(例えば、特許文献1参照。)。
【特許文献1】特開2006−112932号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の車両においては、単に充電施設及び近隣の立寄施設を表示するだけであるので、充電を行っている間に観光施設等に立ち寄った場合、充電が終了するまでに充電施設に帰ってくることができるかどうかを把握することができなかった。
【0007】
本発明は、前記従来の車両の問題点を解決して、所定の施設で車両のメンテナンスが行われている間、前記所定の施設の近隣の立寄施設に徒歩で立ち寄ることが可能かどうかを把握することができる立寄施設案内システム及び立寄施設案内方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
そのために、本発明の立寄施設案内システムにおいては、所定の施設で車両のメンテナンスを行う際に、メンテナンスを行うのに必要なメンテナンス所要時間を算出するメンテナンス所要時間算出処理手段と、前記メンテナンスが行われる施設の近隣の立寄施設を検索する立寄施設検索処理手段と、前記検索された立寄施設を表示する表示処理手段と、前記表示された立寄施設から一つの立寄施設が選択されたときに、選択された立寄施設を設定する立寄施設設定処理手段と、前記設定された立寄施設に立ち寄り、メンテナンスが行われる施設に戻るまでの徒歩による総所要時間を算出する総所要時間算出処理手段と、前記総所要時間とメンテナンス所要時間とを比較する比較処理手段と、前記総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかを通知する立寄施設通知処理手段とを有する。
【発明の効果】
【0009】
本発明によれば、総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかが通知されるので、立寄施設に立ち寄った後、メンテナンスが行われている施設に戻るタイミングを予想することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、車両としての電動車両、本実施の形態においては、ハイブリッド型車両を走行させ、所定の施設としての駐車場に出かけ、ハイブリッド型車両のメンテナンスとしての充電を行う場合の立寄施設案内システムについて説明する。
【0011】
図1は本発明の実施の形態における電動車両駆動制御システムを示す図である。
【0012】
図において、10は車両駆動制御装置としての電動車両駆動制御装置、11はハイブリッド型車両を走行させるための駆動装置を構成する電動駆動装置、14は情報端末、例えば、ハイブリッド型車両に搭載された車載装置としてのナビゲーション装置、63はネットワーク、51は情報提供者としての情報センタであり、前記ナビゲーション装置14、ネットワーク63、情報センタ51等によってナビゲーションシステムが構成され、該ナビゲーションシステム、電動車両駆動制御装置10、電動駆動装置11等によって電動車両駆動制御システムが構成される。なお、該電動車両駆動制御システムによって、立寄施設を案内する立寄施設案内システムが構成される。
【0013】
前記電動駆動装置11において、21は第1の駆動源としてのエンジン(E)、23は該エンジン21から伝達された回転に対して変速を行うとともに、トルクの分配を行う差動回転装置としてのプラネタリギヤユニット、25は該プラネタリギヤユニット23における分配後のトルクが出力される出力ギヤ、26は前記プラネタリギヤユニット23と連結された第2の駆動源としての、かつ、第1の電動機械としての発電機(G)である。
【0014】
前記プラネタリギヤユニット23は、少なくとも、第1の差動要素としてのサンギヤS、該サンギヤSと噛(し)合するピニオンP、該ピニオンPと噛合する第2の差動要素としてのリングギヤR、及び前記ピニオンPを回転自在に支持する第3の差動要素としてのキャリヤCRを備え、前記サンギヤSは発電機26と、リングギヤRは第3の駆動源としての、かつ、第2の電動機械としての駆動モータ(M)27及び駆動輪28と、キャリヤCRはエンジン21と連結される。そして、前記エンジン21、発電機26及び駆動モータ27は、プラネタリギヤユニット23を介して差動回転自在に、かつ、機械的に連結されるとともに、駆動輪28と機械的に連結される。
【0015】
なお、前記キャリヤCRと電動車両駆動制御装置10の図示されないケースとの間に図示されないワンウェイクラッチが配設され、該ワンウェイクラッチは、逆方向の回転がエンジン21に伝達されないようにする。
【0016】
前記発電機26は、プラネタリギヤユニット23から伝達される回転によって電力を発生させる。そのために、前記発電機26は、充電要素としてのバッテリ18に接続され、該バッテリ18に直流の電流を供給する。また、前記発電機26において、図示されないロータと前記ケースとの間に図示されない発電機ブレーキが配設され、該発電機ブレーキを係合させることによってロータを固定し、発電機26の回転を機械的に停止させることができる。
【0017】
なお、本実施の形態においては、自宅等のように商用電源を利用することができ、所定の充電設備19を備えた施設(地点)で、深夜電力によってバッテリ18を充電することができるようになっている。そのために、充電設備19に図示されないコンセントが、ハイブリッド型車両に図示されないプラグがそれぞれ配設され、該プラグをコンセントに差し込むことによって、前記充電設備19とバッテリ18とが接続される。なお、本実施の形態においては、バッテリ18を充電するようになっているが、バッテリ18だけでなく、充電要素としてのキャパシタ等に充電することができる。
【0018】
また、前記発電機26は、図示されない発電機用インバータを介してバッテリ18に接続され、前記発電機用インバータは、バッテリ18から供給された直流の電流を交流の電流であるU相、V相及びW相の電流に変換し、発電機26に送る。それに伴って、発電機26が駆動され、発電機26のトルクである発電機トルクが発生させられる。
【0019】
そして、前記駆動モータ27は、図示されない駆動モータ用インバータを介してバッテリ18に接続され、前記駆動モータ用インバータは、バッテリ18から供給された直流の電流を、交流の電流であるU相、V相及びW相の電流に変換し、駆動モータ27に送る。それに伴って、駆動モータ27が駆動され、駆動モータ27のトルクである駆動モータトルクが発生させられる。なお、ハイブリッド型車両を制動する場合等に駆動モータ27によって回生した電力をバッテリ18に充電することができる。
【0020】
次に、前記電動駆動装置11の制御を行うための電動車両駆動制御装置10について説明する。
【0021】
該電動車両駆動制御装置10において、41はハイブリッド型車両の全体の制御を行うための車両制御装置であり、該車両制御装置41には、エンジン21の制御を行うためのエンジン制御装置46、発電機26の制御を行うための発電機制御装置47、及び駆動モータ27の制御を行うための駆動モータ制御装置49が接続されるとともに、ナビゲーション装置14のナビゲーション処理部17が接続される。
【0022】
前記車両制御装置41は、CPU61、該CPU61が各種の演算処理を行う際にワーキングメモリとして使用されるRAM62、制御用のプログラムが記録されたROM64等を備える。また、前記エンジン制御装置46、発電機制御装置47及び駆動モータ制御装置49は、図示されないCPU、RAM、ROM等から成り、それぞれ、エンジン21、発電機26及び駆動モータ27の制御を行う。
【0023】
なお、前記エンジン制御装置46、発電機制御装置47、駆動モータ制御装置49及びナビゲーション処理部17によって、車両制御装置41より下位の第1の制御装置が、前記車両制御装置41によって、エンジン制御装置46、発電機制御装置47、駆動モータ制御装置49及びナビゲーション処理部17より上位の第2の制御装置が構成される。
【0024】
前記ナビゲーション装置14は、ハイブリッド型車両の現在地を自車位置として、ハイブリッド型車両の方位を自車方位として検出する現在地検出部としてのGPSセンサ15、図示されない地図データ等の各種の情報が記録された情報記録部としてのデータ記録部16、ナビゲーション処理等の各種の演算処理を行うナビゲーション処理部17、操作者である運転者が操作することによって所定の入力を行うための第1の入力部としての操作部34、図示されない画面に表示された画像によって各種の表示を行い、運転者に通知するための第1の出力部としての表示部35、運転者が音声によって所定の入力を行うための第2の入力部としての音声入力部36、音声出力を行い、各種の情報を運転者に通知するための第2の出力部としての音声出力部37、及び通信端末として機能する送受信部としての通信部38を備える。また、前記ナビゲーション処理部17には、GPSセンサ15、データ記録部16、操作部34、表示部35、音声入力部36、音声出力部37及び通信部38が接続される。そして、前記GPSセンサ15は、自車位置及び自車方位のほかに、時刻を検出する。なお、GPSセンサ15とは別に、方位センサを配設することによって自車方位を検出することができる。
【0025】
前記データ記録部16は、地図データファイルから成る図示されない地図データベースを備え、該地図データベースに地図データが記録される。該地図データには、交差点(分岐点)に関する交差点データ、ノードに関するノードデータ、道路リンクに関する道路データ、探索用に加工された探索データ、施設に関する施設データ等が含まれるほか、道路上の地物に関する地物データが含まれる。
【0026】
さらに、前記データ記録部16には、統計データファイルから成る図示されない統計データベース、走行履歴データファイルから成る図示されない走行履歴データベース等が形成され、前記統計データファイルに統計データが、前記走行履歴データファイルに走行履歴データが、いずれも実績データとして記録される。
【0027】
前記データ記録部16は、前記各種のデータを記録するために、ハードディスク、CD、DVD、光ディスク等の図示されないディスクを備えるほかに、各種のデータを読み出したり、書き込んだりするための読出・書込ヘッド等の図示されないヘッドを備える。また、前記データ記録部16にメモリカード等を使用することができる。なお、前記各ディスク、メモリカード等によって外部記憶装置が構成される。
【0028】
本実施の形態においては、前記データ記録部16に、前記地図データベース、統計データベース、走行履歴データベース等が形成されるようになっているが、情報センタ51において、前記地図データベース、統計データベース、走行履歴データベース等を形成することもできる。
【0029】
また、前記ナビゲーション処理部17は、ナビゲーション装置14の全体の制御を行う制御装置としての、かつ、演算装置としてのCPU31、該CPU31が各種の演算処理を行うに当たってワーキングメモリとして使用されるRAM32、制御用のプログラムのほか、目的地までの経路の探索、経路案内等を行うための各種のプログラムが記録されたROM33、各種のデータ、プログラム等を記録するために使用される図示されないフラッシュメモリ等を備える。
【0030】
前記操作部34として、表示部35とは別に配設された図示されないキーボード、マウス等を使用することができる。また、前記操作部34として、前記表示部35に形成された画面に画像で表示された各種のキー、スイッチ、ボタン等の画像操作部をタッチ又はクリックすることによって、所定の入力操作を行うことができるようにしたタッチパネルを使用することができる。
【0031】
また、前記表示部35としてディスプレイが使用され、自車位置、自車方位等を表示したり、地図、探索経路、該探索経路に沿った案内情報、交通情報等を表示したり、探索経路における次の交差点までの距離、次の交差点における進行方向を表示したりすることができる。
【0032】
そして、音声入力部36は、図示されないマイクロホン等によって構成され、音声によって必要な情報を入力することができる。さらに、音声出力部37は、図示されない音声合成装置及びスピーカを備え、前記探索経路の経路案内を音声出力によって行うことができる。
【0033】
前記通信部38は、VICS(登録商標:Vehicle Information and Communication System)センタ等の道路交通情報センタから送信された現況の交通情報、一般情報等の各種の情報を受信するための図示されないビーコンレシーバ、FM放送局を介してFM多重放送として受信するための図示されないFM受信機等を備える。そして、通信部38は、前記情報センタ51から、交通情報、一般情報等の各種の情報のほかに、前記地図データ、統計データ、走行履歴データ等のデータをネットワーク63を介して受信することができる。
【0034】
そのために、前記情報センタ51は、サーバ53、通信部57、情報記録部としてのデータベース(DB)58等を備え、前記サーバ53は、CPU54、RAM55、ROM56等を備える。また、前記データベース58には、前記データ記録部16に記録された各種のデータと同様のデータが記録される。
【0035】
なお、前記電動車両駆動制御システム、電動車両駆動制御装置10、エンジン制御装置46、発電機制御装置47、駆動モータ制御装置49、ナビゲーションシステム、ナビゲーション処理部17、サーバ53、CPU31、54、61等は、単独で、又は二つ以上組み合わせることによってコンピュータとして機能し、各種のプログラム、データ等に基づいて演算処理を行う。
【0036】
前記データ記録部16、RAM32、55、62、ROM33、56、64、フラッシュメモリ等によって記録装置及び記録媒体が構成される。また、CPU31、54、61等によって演算装置が構成される。そして、演算装置として、前記CPU31、54、61に代えてMPU等を使用することもできる。
【0037】
次に、前記ナビゲーション装置14の基本動作について説明する。
【0038】
まず、運転者によって操作部34が操作され、ナビゲーション装置14が起動されると、CPU31の図示されない現在地読込処理手段は、現在地読込処理を行い、GPSセンサ15によって検出された自車位置及び自車方位を読み込む。次に、前記CPU31の図示されない自車位置算出処理手段は、自車位置算出処理(マッチング処理)を行い、読み込まれた自車位置の軌跡、及び自車位置の周辺の道路を構成する各道路リンクの形状、配列等の情報に基づいて、自車位置がいずれの道路リンク上に位置するかの判定を行うことによって、自車位置を算出し、特定する。
【0039】
続いて、CPU31の図示されない基本情報取得処理手段は、基本情報取得処理を行い、前記地図データを、データ記録部16から読み出して取得するか、又は通信部38を介して情報センタ51等から受信して取得する。なお、地図データを情報センタ51等から取得する場合、前記基本情報取得処理手段は、受信した地図データをフラッシュメモリにダウンロードする。
【0040】
そして、前記CPU31の図示されない表示処理手段は、表示処理を行い、前記表示部35に各種の画面を形成する。例えば、表示処理手段の地図表示処理手段は、地図表示処理を行い、表示部35に地図画面を形成し、該地図画面に周囲の地図を表示するとともに、自車位置及び自車方位を表示する。
【0041】
したがって、運転者は、前記地図データ、自車位置及び自車方位の表示に従って車両を走行させることができる。
【0042】
また、運転者が操作部34を操作して目的地を入力すると、CPU31の図示されない目的地設定処理手段は、目的地設定処理を行い、目的地を設定する。なお、本実施の形態においては、操作部34を操作して目的地を入力する代わりに、運転者が電子手帳、パソコン等の図示されない端末装置を使用して、ハイブリッド型車両を走行させる予定を表す行動スケジュールを入力するようになっている。そのために、ナビゲーション装置14は、電子手帳等を接続するための図示されないコネクタ、パソコンとの間でデータの送受信を行うための通信部38等を備える。
【0043】
前記行動スケジュールは、各日付における出発地、目的地、出発地における出発予定時間、目的地における到着予定時間等から成る。
【0044】
続いて、前記ナビゲーション装置14において、前記CPU31の図示されない行動スケジュール取得処理手段は、行動スケジュール取得処理を行い、ハイブリッド型車両が走行を開始する前に、端末装置から入力された行動スケジュールを読み込むことによって取得し、最初の出発地である自宅から出発し、各目的地に立ち寄り、最後の目的地である自宅に帰るまでの行動スケジュールを目的地スケジュールとして設定する。
【0045】
このようにして、目的地スケジュール等が設定され、必要に応じて、運転者が操作部34を操作して探索条件を入力すると、CPU31の図示されない探索処理手段は、探索処理を行い、前記自車位置、目的地スケジュール等を読み込むとともに、データ記録部16から、探索データ、施設データのうちの充電設備を備えた駐車場、電気ステーション等の充電施設のデータ(以下「充電施設データ」という。)等を読み出し、自車位置、目的地、探索データ、充電施設データ等に基づいて、目的地スケジュールにおける最初の出発地から最後の目的地までの探索経路を前記探索条件で探索して、経路データを出力する。
【0046】
なお、前記探索経路は、目的地スケジュールにおける各出発地から各目的地までの経路の集まりから成る。また、経路データは、探索経路を表すデータのほかに、探索経路上の探索された充電施設を表すデータから成る。そして、前記探索処理においては、各道路リンクごとに付与されたリンクコストの合計が最も小さい経路が探索される。
【0047】
本実施の形態においては、CPU31において探索処理を行うようになっているが、前記情報センタ51において探索処理を行うこともできる。
【0048】
続いて、前記CPU31の図示されない案内処理手段は、案内処理及び経路案内を行う。そのために、前記案内処理手段の経路表示処理手段は、経路表示処理を行い、前記経路データを読み込み、該経路データに従って前記地図画面に探索経路を表示する。
【0049】
ところで、前記発電機26及び駆動モータ27は、バッテリ18から供給された電流に基づいて駆動されるようになっている。この場合、公害、省エネルギー等の観点から、バッテリ18に充電された電力は、次回の充電までに使い切ることが望ましい。ところが、ハイブリッド型車両を走行させている間に電力を使い切ると、HV走行モードであるにもかかわらず、エンジン21だけを駆動してハイブリッド型車両を走行させることになり、その場合、公害、省エネルギー等の観点から好ましくないだけでなく、ハイブリッド型車両を走行させるために必要な車両要求トルクを十分に発生させることができなくなってしまう。
【0050】
そこで、本実施の形態においては、ナビゲーション装置14において、前記探索データに基づいて、前記充電施設を充電予定地とし、充電が可能な各出発地から充電予定地までの間の経路上の各地点における望ましいバッテリ残量SOCを、バッテリ残量SOCの目標値、すなわち、目標充電容量としての目標バッテリ残量SOC* として算出するようにしている。
【0051】
そのために、CPU31の充電スケジュール設定処理手段としての図示されないエルネギー制御判定処理手段は、充電スケジュール設定処理としてのエルネギー制御判定処理を行い、最初の出発地における充電容量としてのバッテリ残量SOC、充電可能な出発地から充電予定地までの距離、各充電予定地において再び出発するまでの、充電に費やすことができる時間、すなわち、充電充当時間、バッテリ18を満充電するのに必要な時間、すなわち、充電所要時間等の充電条件を読み込み、該充電条件に基づいて、充電可能な出発地を出発してからの走行距離を算出し、次の充電予定地に到着したときのバッテリ残量SOCが0〔%〕になるように、各地点における目標バッテリ残量SOC* を算出し、各地点ごとの目標バッテリ残量SOC* から成る充電スケジュールを設定する。
【0052】
なお、前記充電予定地によって、メンテナンスを行う予定の施設、すなわち、メンテナンス予定地が構成され、前記充電充当時間によって、各メンテナンス予定地において再び出発するまでの、メンテナンスに費やすことができる時間、すなわち、メンテナンス充電充当時間が構成され、充電所要時間によって、メンテナンスを行うのに必要な時間、すなわち、メンテナンス所要時間が構成される。
【0053】
ここで、前記バッテリ残量SOCは、バッテリ18の容量に対して実際にバッテリ18に充電されている電荷量の割合を表す値であり、充電残量を構成する。バッテリ18が完全に充電され、バッテリ18の容量に対して実際にバッテリ18に充電されている電荷量の割合が100〔%〕である場合、バッテリ残量SOCは100〔%〕であり、バッテリ18は満充電されたという。
【0054】
バッテリ残量SOCを算出するために、バッテリ18には、バッテリ電圧を検出する図示されない電圧検出部としてのバッテリ電圧センサ、及びバッテリ電流を検出する図示されない電流検出部としてのバッテリ電流センサが配設され、前記バッテリ電圧センサのセンサ出力及びバッテリ電流センサのセンサ出力が車両制御装置41に供給されるようになっている。そして、該車両制御装置41の充電残量算出処理手段としての図示されないバッテリ残量算出処理手段は、充電残量算出処理としてのバッテリ残量算出処理を行い、バッテリ残量SOCを算出する。
【0055】
この場合、最初の出発地及び最終の目的地は自宅とし、自宅を出発する際のバッテリ18は満充電されていて、バッテリ残量SOCは100〔%〕であるとし、自宅に到着したときのバッテリ残量SOCは0〔%〕であるとする。そして、各充電予定地に到着したときのバッテリ残量SOCもほぼ0〔%〕とし、前記各充電予定地で充電を行うものとする。また、各充電予定地における充電充当時間が充電所要時間より短い場合、各充電予定地に到着したときに充電を開始し、出発するときに充電を終了するものとする。この場合、バッテリ残量SOCは100〔%〕にならないまま、次の目的地に向かうことになる。
【0056】
なお、前記バッテリ残量SOCは、物理的に100〔%〕になったり、0〔%〕になったりすることを指すわけではなく、バッテリ18を繰り返し経済的に使用し得る最も高いバッテリ残量、及び最も低いバッテリ残量をいう。また、バッテリ残量SOCは、バッテリ18の性能、材質等によって異なり、例えば、アルカリ電池の場合には、きわめて低い値になるまで使用することができるが、鉛電池の場合には、過剰に低い値まで使用すると寿命を短くするので、所定の容量を残した状態をバッテリ残量SOCが0〔%〕であるとする。
【0057】
前述されたように、充電スケジュールが設定されると、CPU31の図示されない駆動制御指示処理手段は、駆動制御指示処理を行い、前記エルネギー制御判定処理における判定結果である充電スケジュールを電動車両駆動制御装置10に通知し、電動駆動装置11の駆動を指示する。
【0058】
続いて、電動車両駆動制御装置10において、CPU61の図示されない駆動制御処理手段は、駆動制御処理を行い、前記充電スケジュールに基づいて電動駆動装置11を駆動する。
【0059】
次に、前記駆動制御処理手段の動作について説明する。
【0060】
まず、前記駆動制御処理手段の駆動条件取得処理手段は、駆動条件取得処理を行い、図示されないアクセルペダルに配設されたアクセルスイッチからアクセルペダルの位置、すなわち、アクセルペダル位置を、図示されないブレーキペダルに配設されたブレーキスイッチからブレーキペダルの位置、すなわち、ブレーキペダル位置を読み込むとともに、前記駆動モータ27に配設された位置検出部としての図示されないロータ位置センサ(レゾルバ等)からロータ位置を読み込み、該ロータ位置に基づいて走行条件としての車速を算出する。この場合、アクセルスイッチ及びブレーキスイッチは、運転操作量検出部として機能し、ロータ位置センサは車速検出部として機能する。なお、前記車速は、出力ギヤ25に車速検出部としての速度センサを配設し、該速度センサによって検出することもできる。
【0061】
続いて、前記駆動制御処理手段の車両要求トルク算出処理手段は、車両要求トルク算出処理を行い、前記アクセルペダル位置、ブレーキペダル位置及び車速に基づいて、ハイブリッド型車両を走行させるのに必要な車両要求トルクTO* を算出する。
【0062】
次に、前記駆動制御処理手段の車両要求トルク判定処理手段は、車両要求トルク判定処理を行い、車両要求トルクTO* が駆動モータ27の定格としてあらかじめ設定されている最大の駆動モータトルク、すなわち、駆動モータ最大トルクより大きいかどうかを判断する。そして、車両要求トルクTO* が駆動モータ最大トルクより大きい場合、前記駆動制御処理手段の急加速制御処理手段は、急加速制御処理を行い、前記エンジン21が停止中であるかどうかを判断し、エンジン21が停止中である場合、発電機26及び駆動モータ27を駆動してハイブリッド型車両をEV走行モードで走行させる。
【0063】
また、車両要求トルクTO* が駆動モータ最大トルク以下である場合、及び車両要求トルクTO* が駆動モータ最大トルクより大きく、かつ、エンジン21が停止中でない場合、前記駆動制御処理手段の運転者要求出力算出処理手段は、運転者要求出力算出処理を行い、前記車両要求トルクTO* と車速とを乗算することによって、運転者要求出力PDを算出する。そして、前記駆動制御処理手段のバッテリ充放電要求出力算出処理手段は、バッテリ充放電要求出力算出処理を行い、ナビゲーション装置14から充電スケジュールを読み込むとともに、前記バッテリ残量SOCを読み込み、現在のバッテリ残量SOCを前記充電スケジュールの目標バッテリ残量SOC* に近づけるように充放電要求出力としてのバッテリ充放電要求出力LSOCを算出する。続いて、前記駆動制御処理手段の車両要求出力算出処理手段は、車両要求出力算出処理を行い、前記運転者要求出力PDとバッテリ充放電要求出力LSOCとを加算することによって、車両要求出力POを算出する。
【0064】
次に、前記駆動制御処理手段のエンジン目標運転状態設定処理手段は、エンジン目標運転状態設定処理を行い、前記ROM64に記録されたエンジン目標運転状態マップを参照し、前記車両要求出力PO、アクセルペダル位置等に基づいて、エンジン21の効率が最も高くなる最適燃費曲線上の運転ポイントを決定し、該運転ポイントにおけるエンジン21のトルク、すなわち、エンジントルクTEを、エンジントルクTEの目標値を表すエンジン目標トルクTE* として決定し、前記運転ポイントにおけるエンジンの回転速度、すなわち、エンジン回転速度NEを、エンジン回転速度NEの目標値を表すエンジン目標回転速度NE* として決定し、該エンジン目標回転速度NE* をエンジン制御装置46に送る。
【0065】
該エンジン制御装置46は、エンジン制御装置46の記録装置としてのROMに記録されたエンジン駆動領域マップを参照して、車速、バッテリ残量SOC及び車両要求トルクTO* に基づいて、電動駆動装置11がエンジン21を駆動するための駆動領域に置かれているかどうかを判断する。この場合、バッテリ残量SOCが大きいほど駆動領域が狭くされ、バッテリ残量SOCが小さいほど駆動領域が広くされる。
【0066】
また、エンジン21が駆動領域に置かれているにもかかわらず、エンジン21が駆動されていない場合、エンジン制御装置46の図示されないエンジン制御処理手段は、エンジン制御処理を行い、エンジン21を始動させ、ハイブリッド型車両をHV走行モードで走行させる。また、エンジン21が駆動領域に置かれていないにもかかわらず、エンジン21が駆動されている場合、前記エンジン制御処理手段は、エンジン21の駆動を停止させ、ハイブリッド型車両をEV走行モードで走行させる。
【0067】
そして、前記エンジン21が駆動領域に置かれておらず、エンジン21が駆動されていない場合、前記駆動制御処理手段の駆動モータ目標トルク算出処理手段は、駆動モータ目標トルク算出処理を行い、前記車両要求トルクTO* を、目標となる駆動モータトルクTMの目標値を表す駆動モータ目標トルクTM* として算出し、該駆動モータ目標トルクTM* を駆動モータ制御装置49に送る。この場合、該駆動モータ制御装置49の図示されない電動機械制御処理手段としての駆動モータ制御処理手段は、電動機械制御処理手段としての駆動モータ制御処理を行い、駆動モータ27のトルク制御を行う。
【0068】
また、前記エンジン21が駆動領域に置かれていて、かつ、エンジン21が駆動されている場合、前記エンジン制御処理手段は、所定の方法でエンジン21の制御を行う。
【0069】
次に、発電機制御装置47の図示されない発電機目標回転速度算出処理手段は、発電機目標回転速度算出処理を行う。すなわち、発電機目標回転速度算出処理手段は、前記ロータ位置センサからロータ位置を読み込み、該ロータ位置に基づいてリングギヤRの回転速度を算出するとともに、エンジン目標回転速度NE* を読み込み、リングギヤRの回転速度及びエンジン目標回転速度NE* に基づいて、前記プラネタリギヤユニット23におけるサンギヤS、ピニオンP及びリングギヤRの歯数比で表される回転速度関係式によって、エンジン目標回転速度NE* に対応する発電機26の回転速度、すなわち、発電機回転速度NGの目標値を表す発電機目標回転速度NG* を算出する。
【0070】
ところで、前記構成のハイブリッド型車両をエンジン21及び駆動モータ27を駆動し、HV走行モードで走行させているときに、発電機回転速度NGが低い場合、消費電力が大きくなり、発電機26の発電効率が低くなるとともに、ハイブリッド型車両の燃費がその分悪くなってしまう。そこで、発電機回転速度NGが低い場合、発電機ブレーキを係合させ、発電機26を機械的に停止させ、燃費を良くするようにしている。
【0071】
そして、発電機トルクTGの目標値を表す発電機目標トルクTG* が決定されると、発電機制御装置47において前記発電機目標トルクTG* に基づいて発電機26のトルク制御が行われ、所定の発電機トルクTGが発生させられると、エンジントルクTE、リングギヤRのトルク、すなわち、リングギヤトルク及び発電機トルクTGは互いに反力を受け合うので、発電機トルクTGがリングギヤトルクに変換されてリングギヤRから出力される。このとき、リングギヤトルクがリングギヤRから出力されるのに伴って、発電機回転速度NGが変動し、前記リングギヤトルクが変動すると、変動したリングギヤトルクが駆動輪28に伝達され、ハイブリッド型車両の走行フィーリングが低下してしまう。
【0072】
そこで、前記駆動モータ目標トルク算出処理手段は、発電機回転速度NGの変動に伴う発電機26のイナーシャ分のトルクを見込んでリングギヤトルクを算出し、該リングギヤトルクに基づいて駆動モータ27の出力軸におけるトルク、すなわち、駆動軸トルクを推定し、前記車両要求トルクTO* から駆動軸トルクを減算することによって、駆動軸トルクでは過不足する分を前記駆動モータ目標トルクTM* として算出する。
【0073】
このように、本実施の形態においては、前記充電スケジュール、アクセルペダル位置、ブレーキペダル位置、車速、バッテリ残量SOC等の駆動条件に応じて、エンジン21を停止させ、発電機26及び駆動モータ27を駆動するか、エンジン21及び発電機26を停止させ、駆動モータ27だけを駆動してハイブリッド型車両をEV走行モードで走行させたり、エンジン21及び駆動モータ27を駆動し、発電機26を反力を受けるために駆動するか、エンジン21及び駆動モータ27を駆動し、発電機26を機械的に停止させるかして、ハイブリッド型車両をHV走行モードで走行させたりするようになっている。
【0074】
ところで、所定の充電施設、例えば、駐車場が充電予定地とされた場合、前記駐車場で充電が行われている間、運転者が駐車場の近隣の施設に立ち寄ることができるように、施設が案内されるようになっている。
【0075】
そのために、前記CPU31の図示されない立寄案内処理手段は、立寄案内処理を行い、立寄施設を検索し、運転者に案内する。
【0076】
図2は本発明の実施の形態における立寄案内処理手段の動作を示す第1のフローチャート、図3は本発明の実施の形態における立寄案内処理手段の動作を示す第2のフローチャート、図4は本発明の実施の形態における平均滞在時間マップ、図5は本発明の実施の形態における視聴所要時間マップである。
【0077】
まず、前記立寄案内処理手段のメンテナンス所要時間算出処理手段としての充電所要時間算出処理手段は、メンテナンス所要時間算出処理としての充電所要時間算出処理を行い、車両が駐車場に到着すると、バッテリ残量SOCを読み込み、駐車場の充電設備によって充電を行うに当たり、前記バッテリ残量SOCに基づいて充電所要時間を算出し、前記表示処理手段は、充電所要時間を表示部35(図1)に表示する。
【0078】
また、前記立寄案内処理手段の立寄施設検索処理手段は、立寄施設検索処理を行い、施設データを読み出し、運転者が駐車場から徒歩で移動することができる距離(本実施の形態においては、1000〔m〕)の範囲内、すなわち、徒歩移動距離圏内の施設を立寄施設として検索し、前記表示処理手段は、立寄施設検索処理において検索された立寄施設をリストにして前記表示部35に表示するとともに、表示部35に表示された地図上に立寄施設を表すマークを表示する。
【0079】
そして、運転者が、前記操作部34を操作することによって、表示されたリスト又は立寄施設を表すマークが表示された地図上から一つの立寄施設を選択すると、前記立寄案内処理手段の立寄施設設定処理手段は、立寄施設設定処理を行い、選択された立寄施設を設定する。続いて、前記探索処理手段は、駐車場を出発地とし、選択された立寄施設を目的地として経路を探索し、探索された経路を立寄経路とする。
【0080】
次に、前記立寄案内処理手段の総所要時間算出処理手段は、総所要時間算出処理を行い、駐車場から立寄施設まで運転者が徒歩で移動するのに必要な時間、すなわち、移動時間としての徒歩所要時間を立寄経路に基づいて算出する。続いて、前記総所要時間算出処理手段は、立寄施設の種別が分かっているかどうかを判断する。施設の種別が分かっている場合、前記総所要時間算出処理手段は、ROM33に設定された図4に示されるような平均滞在時間マップを参照し、各立寄施設の平均滞在時間を種別に応じて読み出して取得する。一方、施設の種別が分かっていない場合、前記総所要時間算出処理手段は、一律に設定され、例えば、CPU31の図示されないバッファに記録された標準的な平均滞在時間(以下「標準滞在時間」という。)を読み出して取得する。本実施の形態において、標準滞在時間はバッファに記録されるようになっているが、前記平均滞在時間マップの所定の領域に、種別ごとの平均滞在時間とは別に記録することができる。なお、前記平均滞在時間マップには、立寄施設の分類ごとに立寄施設の種別が分けられ、各立寄施設の種別に対応させて平均滞在時間が記録される。
【0081】
続いて、前記総所要時間算出処理手段は、前記徒歩所要時間を2倍することによって、駐車場から選択された立寄施設までの往復の所要時間を算出し、算出された往復の所要時間に平均滞在時間を加算することによって、駐車場から選択された立寄施設に立ち寄り、平均滞在時間だけ選択された立寄施設に滞在した後、選択された立寄施設から駐車場に戻るまでの徒歩による総所要時間を算出する。
【0082】
次に、前記立寄案内処理手段の比較処理手段は、比較処理を行い、前記総所要時間と充電所要時間とを比較し、総所要時間が充電所要時間より短いかどうかを判断し、前記表示処理手段は、選択された立寄施設に徒歩で立ち寄ることが可能であるかどうかを表示部35にメッセージで表示する。
【0083】
すなわち、総所要時間が充電所要時間より短い場合、前記表示処理手段は、選択された立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示する。このとき、前記表示処理手段は、徒歩所要時間、平均滞在時間、滞在可能時間等を地図上に併せて表示する。また、総所要時間が充電所要時間より長い場合、前記表示処理手段は、前記選択された立寄施設に徒歩以外の移動手段、例えば、車両で、充電終了後に立ち寄るように指示する旨のメッセージを表示する。総所要時間が充電所要時間より長い場合、前記表示処理手段は、選択された立寄施設に徒歩で立ち寄ることができない旨のメッセージを表示することもできる。
【0084】
なお、本実施の形態において、前記比較処理手段は、総所要時間が充電所要時間より短いかどうかを判断し、総所要時間が充電所要時間より短い場合、前記表示処理手段は、前記立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示するようになっているが、あらかじめ運転者が許容時間を設定した場合には、総所要時間が充電所要時間より設定された許容時間だけ長くても、前記表示処理手段は、前記立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示する。
【0085】
そして、前記立寄案内処理手段のメンテナンス終了判断処理手段としての充電終了判断処理手段は、メンテナンス終了判断処理としての充電終了判断処理を行い、充電が終了したかどうかを判断する。充電が終了すると、前記立寄案内処理手段のメンテナンス終了通知処理手段としての充電終了通知処理手段は、メンテナンス終了通知処理としての充電終了通知処理を行い、運転者に充電が終了した旨を、通信装置としての、かつ、通信端末としての携帯電話にメール等で通知する。
【0086】
このように、本実施の形態においては、総所要時間が充電所要時間より短い場合に、立寄施設に立ち寄ることが可能である旨のメッセージが表示されるので、立寄施設に立ち寄った場合、立寄施設から駐車場に戻るタイミングを予想することができる。
【0087】
次に、フローチャートについて説明する。
ステップS1 バッテリ残量SOCを読み込む。
ステップS2 充電所要時間を算出する。
ステップS3 徒歩移動距離圏内の施設を表示する。
ステップS4 立寄施設設定処理を行う。
ステップS5 徒歩所要時間を算出する。
ステップS6 立寄施設の種別が分かっているかどうかを判断する。立寄施設の種別が分かっている場合はステップS8に、分かっていない場合はステップS7に進む。
ステップS7 一律に設定された平均滞在時間を取得してステップS9に進む。
ステップS8 各立寄施設の平均滞在時間を立寄施設の種別に応じて取得する。
ステップS9 総所要時間を算出する。
ステップS10 総所要時間が充電所定時間より短いかどうかを判断する。総所要時間が充電所定時間より短い場合はステップS12に、総所要時間が充電所定時間より長い場合はステップS11に進む。
ステップS11 徒歩以外で立ち寄るように指示する旨のメッセージを表示する。
ステップS12 立寄施設に徒歩で立ち寄ることが可能である旨のメッセージを表示する。
ステップS13 充電が終了するのを待機し、充電が終了するとステップS14に進む。
ステップS14 充電終了を通知し、処理を終了する。
【0088】
本実施の形態においては、前記平均滞在時間マップ及び視聴所要時間マップはROM33に設定されているが、情報センタ51のデータベース58に設定することもできる。
【0089】
また、前記表示処理手段は、総所要時間が充電所要時間より短い立寄施設を地図上に表示するようになっているが、運転者があらかじめ立寄施設の分類等を登録しておくと、表示処理手段は、総所要時間が充電所要時間より短い立寄施設のうちの登録された分類等の立寄施設を選択し、表示することができる。
【0090】
そして、情報センタ51から駐車場の近隣の施設のイベント情報(ディスカウントセール、コンサート、飲食店のランチ時間等)を配信し、該イベント情報を表示部35に表示することができる。
【0091】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0092】
【図1】本発明の実施の形態における電動車両駆動制御システムを示す図である。
【図2】本発明の実施の形態における立寄案内処理手段の動作を示す第1のフローチャートである。
【図3】本発明の実施の形態における立寄案内処理手段の動作を示す第2のフローチャートである。
【図4】本発明の実施の形態における平均滞在時間マップである。
【符号の説明】
【0093】
10 電動車両駆動制御装置
11 電動駆動装置
14 ナビゲーション装置
31 CPU
51 情報センタ
63 ネットワーク
【特許請求の範囲】
【請求項1】
所定の施設で車両のメンテナンスを行う際に、メンテナンスを行うのに必要なメンテナンス所要時間を算出するメンテナンス所要時間算出処理手段と、前記メンテナンスが行われる施設の近隣の立寄施設を検索する立寄施設検索処理手段と、前記検索された立寄施設を表示する表示処理手段と、前記表示された立寄施設から一つの立寄施設が選択されたときに、選択された立寄施設を設定する立寄施設設定処理手段と、前記設定された立寄施設に立ち寄り、メンテナンスが行われる施設に戻るまでの徒歩による総所要時間を算出する総所要時間算出処理手段と、前記総所要時間とメンテナンス所要時間とを比較する比較処理手段と、前記総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかを通知する立寄施設通知処理手段とを有することを特徴とする立寄施設案内システム。
【請求項2】
前記総所要時間算出処理手段は、メンテナンスが行われる施設と立寄施設との間を徒歩で移動するのに必要な移動時間、及び立寄施設における平均滞在時間に基づいて総所要時間を算出する請求項1に記載の立寄施設案内システム。
【請求項3】
前記立寄施設通知処理手段は、前記総所要時間が前記メンテナンス所要時間より短い場合に、立寄施設に立ち寄ることが可能である旨を通知する請求項1に記載の立寄施設案内システム。
【請求項4】
前記メンテナンスが終了したときに、メンテナンスが終了したことを通知するメンテナンス終了通知処理手段を有する請求項1に記載の立寄施設案内システム。
【請求項5】
前記メンテナンスは充電要素への充電である請求項1〜4のいずれか1項に記載の立寄施設案内システム。
【請求項6】
所定の施設で車両のメンテナンスを行う際に、メンテナンスを行うのに必要なメンテナンス所要時間を算出し、前記メンテナンスが行われる施設の近隣の立寄施設を検索し、該検索された立寄施設を表示し、該表示された立寄施設から一つの立寄施設が選択されたときに、選択された立寄施設を設定し、該設定された立寄施設に立ち寄り、メンテナンスが行われる施設に戻るまでの徒歩による総所要時間を算出し、該総所要時間とメンテナンス所要時間とを比較し、前記総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかを通知することを特徴とする立寄施設案内方法。
【請求項1】
所定の施設で車両のメンテナンスを行う際に、メンテナンスを行うのに必要なメンテナンス所要時間を算出するメンテナンス所要時間算出処理手段と、前記メンテナンスが行われる施設の近隣の立寄施設を検索する立寄施設検索処理手段と、前記検索された立寄施設を表示する表示処理手段と、前記表示された立寄施設から一つの立寄施設が選択されたときに、選択された立寄施設を設定する立寄施設設定処理手段と、前記設定された立寄施設に立ち寄り、メンテナンスが行われる施設に戻るまでの徒歩による総所要時間を算出する総所要時間算出処理手段と、前記総所要時間とメンテナンス所要時間とを比較する比較処理手段と、前記総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかを通知する立寄施設通知処理手段とを有することを特徴とする立寄施設案内システム。
【請求項2】
前記総所要時間算出処理手段は、メンテナンスが行われる施設と立寄施設との間を徒歩で移動するのに必要な移動時間、及び立寄施設における平均滞在時間に基づいて総所要時間を算出する請求項1に記載の立寄施設案内システム。
【請求項3】
前記立寄施設通知処理手段は、前記総所要時間が前記メンテナンス所要時間より短い場合に、立寄施設に立ち寄ることが可能である旨を通知する請求項1に記載の立寄施設案内システム。
【請求項4】
前記メンテナンスが終了したときに、メンテナンスが終了したことを通知するメンテナンス終了通知処理手段を有する請求項1に記載の立寄施設案内システム。
【請求項5】
前記メンテナンスは充電要素への充電である請求項1〜4のいずれか1項に記載の立寄施設案内システム。
【請求項6】
所定の施設で車両のメンテナンスを行う際に、メンテナンスを行うのに必要なメンテナンス所要時間を算出し、前記メンテナンスが行われる施設の近隣の立寄施設を検索し、該検索された立寄施設を表示し、該表示された立寄施設から一つの立寄施設が選択されたときに、選択された立寄施設を設定し、該設定された立寄施設に立ち寄り、メンテナンスが行われる施設に戻るまでの徒歩による総所要時間を算出し、該総所要時間とメンテナンス所要時間とを比較し、前記総所要時間とメンテナンス所要時間との比較結果に基づいて、立寄施設に徒歩で立ち寄ることが可能であるかどうかを通知することを特徴とする立寄施設案内方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−249633(P2008−249633A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−94036(P2007−94036)
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]