
端子圧着装置
【課題】簡易な構成により確実に圧着処理の良否を判定できる端子圧着装置を提供する。
【解決手段】昇降自在に設けられるクリンパ2と、該クリンパ2の下方に対向配置されるアンビル10と、端子圧着時に電線Dを下降させて前記アンビル10に移送すべく昇降自在に設けられる電線保持手段20と、を有する端子圧着装置1であって、前記電線Dの下降位置を直接的に検出可能な検出手段と、該検出手段による検出結果を測定波形データとして処理すると共に、該測定波形データと正常な圧着処理についての基準波形データとを比較することにより圧着処理の良否を判定可能な制御手段とを備えている。
【解決手段】昇降自在に設けられるクリンパ2と、該クリンパ2の下方に対向配置されるアンビル10と、端子圧着時に電線Dを下降させて前記アンビル10に移送すべく昇降自在に設けられる電線保持手段20と、を有する端子圧着装置1であって、前記電線Dの下降位置を直接的に検出可能な検出手段と、該検出手段による検出結果を測定波形データとして処理すると共に、該測定波形データと正常な圧着処理についての基準波形データとを比較することにより圧着処理の良否を判定可能な制御手段とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電線のストリップ部(被覆部が除去された芯線部分)に端子を良好に圧着することのできる端子圧着装置に関するものである。
【背景技術】
【0002】
従来、この種の端子圧着装置としては、例えば次のようなものが存在する。即ち、この端子圧着装置は、上下方向に昇降自在なクリンパ(上型)と、該クリンパの下方位置に所定間隔を有して対向配置されるアンビル(下型)と、前記クリンパの昇降動作と連動してカム機構及びリンク機構を介して上下方向に昇降する昇降体と、該昇降体に設けられて処理すべき電線を挟持する電線挟持体と、前記昇降体の昇降位置を変更することのできる位置調整手段とを備えたものである(特許文献1参照)。
【0003】
このような端子圧着装置は、端子圧着時に於ける電線の下降動作により、無理なく電線に端子を圧着することができるために、良好な圧着精度が得られるという利点がある。また、昇降体の昇降位置を変更できる位置調整手段を備えているために、クリンパの昇降動作との関連に於いて適切な圧着のタイミングを得ることもできる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実登2595041号公報
【特許文献2】特開2005−135820号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、この種の端子圧着装置に於いて、圧着不良の発生は避けられないものであるが、その際には不良内容を的確に把握して、迅速に且つ適切に対応することが必要となる。このような圧着不良としては、例えば芯線の一部が端子から外部に食み出してしまう「芯線漏れ圧着不良」や、芯線が前後にずれてしまう「芯線位置ずれ圧着不良」や、芯線が切断されてしまう「芯線切断不良」等がある。一方、かかる圧着不良を検出する機能を備えた端子圧着装置も開発されており、例えば特許文献2に示すようなものが存在する。
【0006】
これは、アンビルを支持するベース板に圧力センサを設けたものであり、圧着時に於ける圧力を圧力センサにより測定し、その測定値に基づいて圧着の良否を判定するものである。
【0007】
しかしながら、圧力特性に基づく圧着不良の検出は必ずしも容易なものではなく、検出精度に欠けるという難点を有しており、特に前記「芯線漏れ圧着不良」を検出することは非常に困難であった。
【0008】
また、この端子圧着装置は、圧着時に電線自体を昇降させる方式を採用しているが、圧着昇降駆動機構に機械的に強制連動させて電線把持機構を昇降させる方式であるために、装置自体の構造が非常に複雑になるという不都合を有し、また処理すべき電線径が変更されると、厄介な調整作業を要するという欠点があった。そのため、最近の端子圧着装置に於いては、圧着機構と電線把持機構とを電気的にタイミングを採って制御するようにしている。しかるに、圧着作業は瞬時に行われるものであるために、目視によりクリンパ及び電線把持機構の下降のタイミングを調整することは極めて困難である。このため、何度も圧着テストを行ってタイミングを微調整するという感覚的且つ面倒な手法が採られており、正確を期し難かった。他方、近年電線の細線化が進み、前記圧力センサによる圧着処理の良否の判定は非常に困難なものとなっている。
【0009】
それ故に、本発明はかかる点に鑑みてなされたものであり、その目的とするところは、簡易な構成により確実に圧着処理の良否を判定できる端子圧着装置を提供することにある。
【課題を解決するための手段】
【0010】
本発明に係る端子圧着装置は、昇降自在に設けられるクリンパと、該クリンパの下方に対向配置されるアンビルと、端子圧着時に電線を下降させて前記アンビルに移送すべく昇降自在に設けられる電線保持手段と、を有する端子圧着装置であって、前記電線の下降位置を直接的に検出可能な検出手段と、該前記検出手段による検出結果を測定波形データとして処理すると共に、該測定波形データと正常な圧着処理についての基準波形データとを比較することにより圧着処理の良否を判定可能な制御手段とを備えさせたものである。
【0011】
このような端子圧着装置に於いては、クリンパ及び電線を下降させて、アンビル上で電線に端子を圧着する。タイミング良くクリンパと電線とがアンビルに略同時に到達した場合は、正常な圧着処理とされる。かかる圧着作業時には、電線の下降位置が検出手段により直接的に検出されるが、その検出結果は制御手段により測定波形データとして処理されると共に、該測定波形データと基準波形データとが比較されて、圧着処理の良否が判定される。これにより、圧着処理の良否の判定がより正確で且つ確実なものとなると共に、圧着不良の発生に対しても迅速且つ適切に対処することが可能になる。ここに、「測定波形データ」とは時間に関連するパラメータと電線下降量に関連するパラメータとで規定される波形データをいう。
【0012】
また、前記検出手段は、電線の下降位置を直接的に検出する距離センサで構成してもよい。
【0013】
これによると、距離センサにより直接的に電線の下降位置が正確に検出されるために、圧着処理の良否の判定が一層確実に行えることになる。
【0014】
更に、前記基準波形データに正常な圧着処理を示す閾値が設けられると共に、該閾値から前記測定波形データが外れた場合には、前記制御手段が圧着不良と判定するように構成することも可能である。
【0015】
この場合は、圧着処理に関する測定波形データが基準波形データの閾値の範囲内にあれば、制御手段により良好な圧着処理と判定される。一方、閾値の範囲外となれば、圧着不良と判定されることになる。このように一定の範囲を有する閾値を設けることにより、圧着処理の判定に関して適正な融通性を持たせることができる結果、一連の圧着作業の効率化に大いに供し得ることになる。
【0016】
また、本発明に係る端子圧着装置は全体の構成が非常に簡易であるために、その製作も容易に且つ安価に行えるという実用的な利点もある。
【発明の効果】
【0017】
以上のように、本発明によれば、簡易な構成により確実に圧着処理の良否を判定できる端子圧着装置を提供することができる。
【図面の簡単な説明】
【0018】
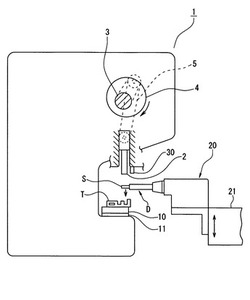
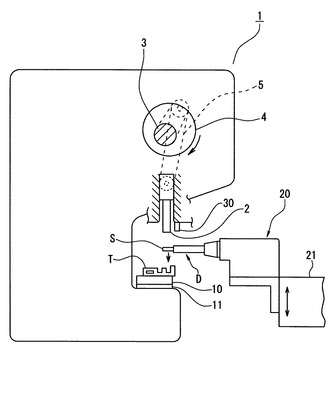
【図1】本発明の一実施形態に係る端子圧着装置を示す側面図である。
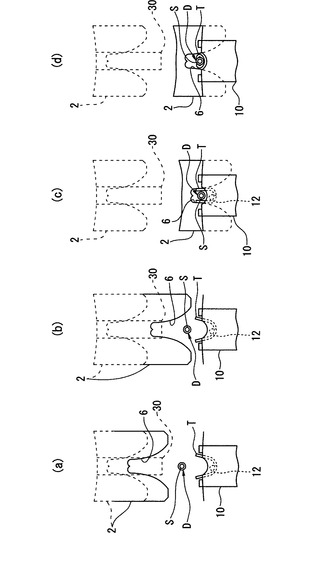
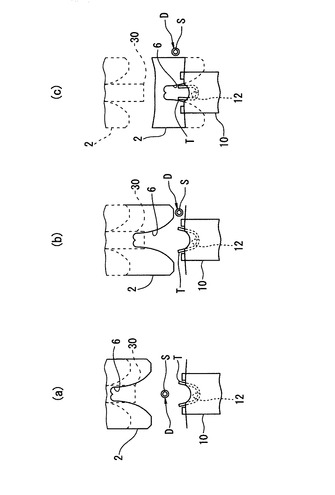
【図2】(a)〜(d)は正常な圧着処理の過程を示す正面図である。
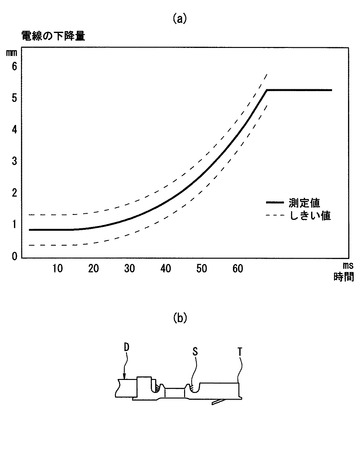
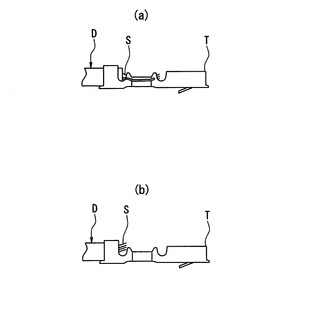
【図3】(a)は正常な圧着処理が行われた場合に於ける電線の下降量の時間的変化を示す模式図で、(b)は正常な圧着処理がなされた電線を示す側面図である。
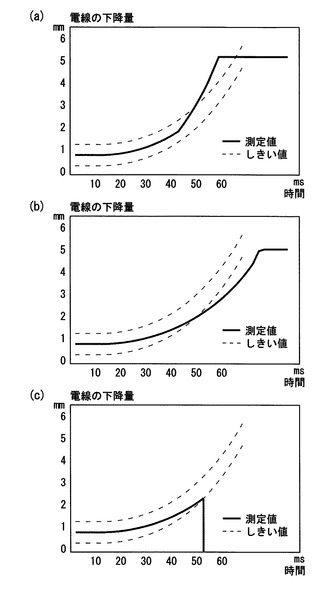
【図4】(a)〜(c)は圧着不良が発生した場合に於ける電線の下降量の時間的変化を示す模式図である。
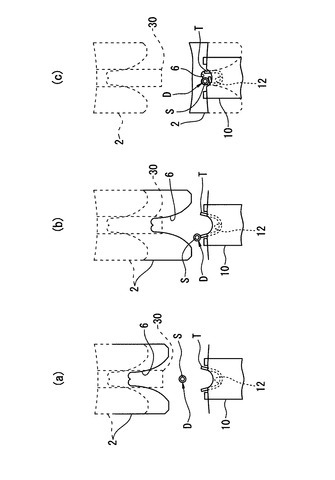
【図5】(a)〜(c)はクリンパよりも先に電線がアンビルに到達した場合に於いて発生する圧着不良の過程を示す正面図である。
【図6】(a)及び(b)は圧着不良が発生した処理電線を示す側面図である。
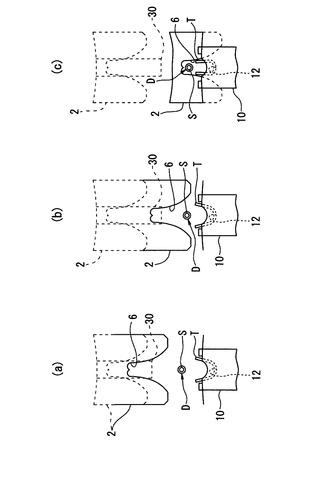
【図7】(a)〜(c)はクリンパと電線とが下降途中に接触した場合に於いて発生する圧着不良の過程を示す正面図である。
【図8】(a)〜(c)はクリンパと電線との下降動作のタイミングが大幅にずれた場合に於いて発生する圧着不良の過程を示す正面図である。
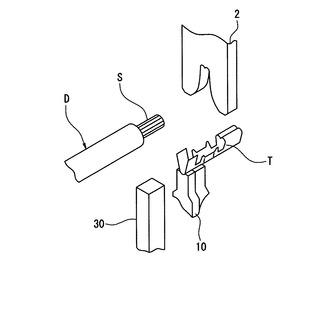
【図9】他の実施形態に係る検出手段の配置位置を示す斜視図である。
【発明を実施するための形態】
【0019】
以下、本発明に係る端子圧着装置の一実施形態について図面に従って説明する。端子圧着装置1は、図1に示すように、上下方向に昇降自在なクリンパ2を有している。このクリンパ2の昇降手段は、サーボモータ等の駆動手段(図示せず)により回転駆動される回転軸3と、該回転軸3に固定されたカム4と、該カム4と前記クリンパ2間に設けられるリンク機構5とから構成されている。クリンパ2の正面中央には、図2各図に示すように、切溝6が上下方向に設けられており、その上端内面部は正面略逆ωの字状に形成されている。
【0020】
図1に示すように、クリンパ2の下方位置には、所定間隔を有してアンビル10が対向配置されており、該アンビル10は基台11上に固定されている。アンビル10の上面中央には、図2各図に示すように、端子Tが嵌合可能な正面略Uの状の凹溝12が形成されている。
【0021】
また、クリンパ2及びアンビル10の前方位置には、図1に示すように、電線Dを保持可能な電線保持手段20が設けられている。この電線保持手段20は、アクチュエータ21により上下方向に昇降するように構成されている。また、アクチュエータ21は制御手段により昇降のタイミングを調整することが可能であり、これによりクリンパ2の圧着動作に合わせて電線Dの下降動作のタイミングを調整できる。かかる制御手段を有することにより、線径の異なる電線Dは大きさや形状が異なる端子Tに対しても、迅速に且つ柔軟に対応できるという利点がある。
【0022】
更に、クリンパ2の前方には、電線Dの下降位置を検出する検出手段としての距離センサ30が設けられている。尚、距離センサ30の取付位置は、クリンパ2の後方でもよい。この距離センサ30は、電線D自体を直接検出するものであり、最上位置にある電線保持手段20に保持された電線Dの位置を基準として、該電線Dの下降位置が下降量として検出される。このように、電線Dを距離センサ30により直接検出させることによって、大変正確な検出結果を得ることができる。そして、距離センサ30からの出力は、制御手段としての制御部(図示せず)によりデジタル処理されて、電線Dの下降開始時から端子圧着時までの下降量の時間的変化が測定値として波形処理される。かかる測定波形データは、圧着不良が生じないものとして予め制御部に登録されている基準波形データと比較されて、圧着処理の良否が判定されることになる。尚、制御部には時間を計測する手段(タイマー)が設けられている。
【0023】
即ち、基準波形データは、図3(a)に示すように、所定幅を有する閾値を示す2本の曲線(破線)からなるものであり、処理された測定波形データが同図の如く2曲線に挟まれる範囲内にあれば、制御部により正常な圧着処理であると判定される。一方、この範囲から一部でも外れてしまうような場合は、制御部により圧着不良であると判定されることになる。但し、この所定範囲から外れた状態が所定時間継続する場合に、圧着不良であると判定したり、所定範囲から外れた状態の累積時間が所定値以上になった場合に、圧着不良であると判定するように設定してもよい他、場合によっては片側のみに閾値を設けることも可能である。
【0024】
このように一定の範囲を有する閾値を設けることにより、圧着処理の判定に関して適正な融通性を持たせることができる結果、一連の圧着作業の効率化に大いに供し得ることになる。
【0025】
尚、圧着不良と判定された処理電線Dは、分別機構(図示せず)により正常な圧着処理と判定された処理電線Dと分別されて、外部に排出されるように構成されている。また、圧着不良が発生した場合は、端子圧着装置1自体が停止するように構成することも可能である。
【0026】
本実施形態に係る端子圧着装置1は、以上のように構成されている。次に、これを使用して電線Dのストリップ部Sに端子Tを圧着する場合について説明する。
【0027】
先ず、電線Dは端子圧着装置1に所定長さ搬送供給された後、電線保持手段20により保持される。そして、この状態で電線Dはカッタ機構(図示せず)により所定の長さに切断されると共に、その端部の被覆が剥離される。その後、電線Dは電線保持手段20により保持された状態で、移送機構(図示せず)により、その先端のストリップ部Sがクリンパ2とアンビル10間の所定位置に配されるように移送される。一方、アンビル10の凹溝12には圧着すべき端子Tが嵌合した状態で搬送供給されている。
【0028】
次に、駆動手段により回転軸3、カム4及びリンク機構5を介してクリンパ2が駆動されて、図2(a)に示すように下降が開始される。その後、制御部からの信号を受けてアクチュエータ21が駆動され、電線Dは電線保持手段20に保持された状態で同図(b)に示すように下降を開始する。そして、同図(c)に示すようにクリンパ2及び電線Dが更に下降した後、両者が同図(d)に示すように略同時にアンビル10に到達する。これにより、アンビル10の凹溝12とクリンパ2の切溝6との間で、端子Tが電線Dのストリップ部Sに圧着される。
【0029】
このような一連の圧着作業に於ける電線Dの下降位置は、上述したように距離センサ30により検出されている。そして、その測定波形データが上記の如く閾値の範囲内にあり、図3(b)に示すような良好な圧着処理であると判定された場合は、圧着処理が連続して行われることになる。
【0030】
これに対して、電線Dの下降動作に起因して圧着不良が発生する場合としては、例えば図4(a)に示すように電線Dがクリンパ2よりも先にアンビル10に到達してしまうような場合と、同図(b)に示すように電線Dの下降途中でクリンパ2と接触してしまうような場合と、同図(c)に示すようにクリンパ2の下降のタイミングと電線保持手段20の動作に異常が発生し、クリンパ2の下降時には既に電線保持手段20が圧着位置から次の動作に移行しているような場合とを挙げることができる。
【0031】
図4(a)に示す場合には、例えば図5のように、電線Dと端子Tとの接触により電線Dのストリップ部Sが拡がってしまい、この状態でクリンパ2により圧着されると、図6(a)に示すような芯線漏れ圧着不良等が発生することになる。
【0032】
このような圧着不良が発生した場合は、その処理電線Dは上記の如く正常な処理電線Dと分別されることになるが、これが連続して発生するような場合は、例えば端子圧着装置1を停止させた後に、アクチュエータ21の下降動作のタイミングを僅かに遅らせるように調整を行えばよい。これにより、電線Dがクリンパ2と同時にアンビル10に到達するようにできるため、クリンパ2側の駆動系については一切調整することなく、上記のようなタイミングのずれを簡易に解消できる。その結果、圧着不良の発生を適切に回避することができる。
【0033】
また、図4(b)に示す場合には、例えば図7のように、電線Dがクランパ2により押圧されて電線Dが前後又は左右に折曲された状態で圧着されるために、図6(b)に示すように、電線Dに対する端子Tの圧着位置にばらつきが生じるという芯線位置ずれ圧着不良等が発生してしまう。
【0034】
この場合は、アクチュエータ21の下降動作のタイミングを僅かに早めるように調整を行えばよい。これにより、電線Dがクリンパ2と同時にアンビル10に到達するようにできるため、クリンパ2側の駆動系については一切調整することなく、タイミングのずれを簡易に解消できる。そして、圧着不良の発生を適切に回避することができるのである。
【0035】
更に、図4(c)に示す場合には、例えば図8のように、電線Dに端子Tは圧着されないことになる。この場合は、上記各場合のようなアクチュエータ21の位置調整の他に、電線保持手段20自身の調整作業が必要となる。
【0036】
以上で説明したように、本実施形態の係る距離センサ30による電線Dの下降位置の直接的な検出、及びその検出結果に基づく制御部による圧着処理の良否の判定という一連の検出判定手段は、端子圧着時に電線Dが下降するという方式を採る端子圧着装置1には最適なものであるということができる。
【0037】
また、本実施形態に係る端子圧着装置1は全体の構成が非常に簡易であるために、その製作も容易に且つ安価に行えるという利点もある。
【0038】
尚、電線Dの特質を考慮した場合、検出手段により直接的に検出する電線Dの部位は、端子Tが圧着されるストリップ部Sであることが好ましい。しかるに、本発明は決してこれに限定されるものではなく、ストリップ部S以外の電線Dの部位を検出対象としても構わない。
【0039】
また、距離センサ30を設ける位置も上記実施形態の如き配置位置に限定されず、例えば図9に示すように、アンビル10の前方位置に設けて下方位置から電線Dを検出したり、或いはクランパ2に直接設けるようにしてもよい。
【0040】
更に、上記実施形態に於いては、基準波形データに正常な圧着処理を示す閾値を設けたが、かかる閾値は必要に応じて設ければよいものであり、省略することも可能である。
【0041】
その他、端子圧着装置1の各部の形状等の具体的な構成も、本発明の意図する範囲内に於いて任意に設計変更自在である。
【符号の説明】
【0042】
1 端子圧着装置
2 クリンパ
10 アンビル
20 電線保持手段
D 電線
T 端子
【技術分野】
【0001】
本発明は、電線のストリップ部(被覆部が除去された芯線部分)に端子を良好に圧着することのできる端子圧着装置に関するものである。
【背景技術】
【0002】
従来、この種の端子圧着装置としては、例えば次のようなものが存在する。即ち、この端子圧着装置は、上下方向に昇降自在なクリンパ(上型)と、該クリンパの下方位置に所定間隔を有して対向配置されるアンビル(下型)と、前記クリンパの昇降動作と連動してカム機構及びリンク機構を介して上下方向に昇降する昇降体と、該昇降体に設けられて処理すべき電線を挟持する電線挟持体と、前記昇降体の昇降位置を変更することのできる位置調整手段とを備えたものである(特許文献1参照)。
【0003】
このような端子圧着装置は、端子圧着時に於ける電線の下降動作により、無理なく電線に端子を圧着することができるために、良好な圧着精度が得られるという利点がある。また、昇降体の昇降位置を変更できる位置調整手段を備えているために、クリンパの昇降動作との関連に於いて適切な圧着のタイミングを得ることもできる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実登2595041号公報
【特許文献2】特開2005−135820号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、この種の端子圧着装置に於いて、圧着不良の発生は避けられないものであるが、その際には不良内容を的確に把握して、迅速に且つ適切に対応することが必要となる。このような圧着不良としては、例えば芯線の一部が端子から外部に食み出してしまう「芯線漏れ圧着不良」や、芯線が前後にずれてしまう「芯線位置ずれ圧着不良」や、芯線が切断されてしまう「芯線切断不良」等がある。一方、かかる圧着不良を検出する機能を備えた端子圧着装置も開発されており、例えば特許文献2に示すようなものが存在する。
【0006】
これは、アンビルを支持するベース板に圧力センサを設けたものであり、圧着時に於ける圧力を圧力センサにより測定し、その測定値に基づいて圧着の良否を判定するものである。
【0007】
しかしながら、圧力特性に基づく圧着不良の検出は必ずしも容易なものではなく、検出精度に欠けるという難点を有しており、特に前記「芯線漏れ圧着不良」を検出することは非常に困難であった。
【0008】
また、この端子圧着装置は、圧着時に電線自体を昇降させる方式を採用しているが、圧着昇降駆動機構に機械的に強制連動させて電線把持機構を昇降させる方式であるために、装置自体の構造が非常に複雑になるという不都合を有し、また処理すべき電線径が変更されると、厄介な調整作業を要するという欠点があった。そのため、最近の端子圧着装置に於いては、圧着機構と電線把持機構とを電気的にタイミングを採って制御するようにしている。しかるに、圧着作業は瞬時に行われるものであるために、目視によりクリンパ及び電線把持機構の下降のタイミングを調整することは極めて困難である。このため、何度も圧着テストを行ってタイミングを微調整するという感覚的且つ面倒な手法が採られており、正確を期し難かった。他方、近年電線の細線化が進み、前記圧力センサによる圧着処理の良否の判定は非常に困難なものとなっている。
【0009】
それ故に、本発明はかかる点に鑑みてなされたものであり、その目的とするところは、簡易な構成により確実に圧着処理の良否を判定できる端子圧着装置を提供することにある。
【課題を解決するための手段】
【0010】
本発明に係る端子圧着装置は、昇降自在に設けられるクリンパと、該クリンパの下方に対向配置されるアンビルと、端子圧着時に電線を下降させて前記アンビルに移送すべく昇降自在に設けられる電線保持手段と、を有する端子圧着装置であって、前記電線の下降位置を直接的に検出可能な検出手段と、該前記検出手段による検出結果を測定波形データとして処理すると共に、該測定波形データと正常な圧着処理についての基準波形データとを比較することにより圧着処理の良否を判定可能な制御手段とを備えさせたものである。
【0011】
このような端子圧着装置に於いては、クリンパ及び電線を下降させて、アンビル上で電線に端子を圧着する。タイミング良くクリンパと電線とがアンビルに略同時に到達した場合は、正常な圧着処理とされる。かかる圧着作業時には、電線の下降位置が検出手段により直接的に検出されるが、その検出結果は制御手段により測定波形データとして処理されると共に、該測定波形データと基準波形データとが比較されて、圧着処理の良否が判定される。これにより、圧着処理の良否の判定がより正確で且つ確実なものとなると共に、圧着不良の発生に対しても迅速且つ適切に対処することが可能になる。ここに、「測定波形データ」とは時間に関連するパラメータと電線下降量に関連するパラメータとで規定される波形データをいう。
【0012】
また、前記検出手段は、電線の下降位置を直接的に検出する距離センサで構成してもよい。
【0013】
これによると、距離センサにより直接的に電線の下降位置が正確に検出されるために、圧着処理の良否の判定が一層確実に行えることになる。
【0014】
更に、前記基準波形データに正常な圧着処理を示す閾値が設けられると共に、該閾値から前記測定波形データが外れた場合には、前記制御手段が圧着不良と判定するように構成することも可能である。
【0015】
この場合は、圧着処理に関する測定波形データが基準波形データの閾値の範囲内にあれば、制御手段により良好な圧着処理と判定される。一方、閾値の範囲外となれば、圧着不良と判定されることになる。このように一定の範囲を有する閾値を設けることにより、圧着処理の判定に関して適正な融通性を持たせることができる結果、一連の圧着作業の効率化に大いに供し得ることになる。
【0016】
また、本発明に係る端子圧着装置は全体の構成が非常に簡易であるために、その製作も容易に且つ安価に行えるという実用的な利点もある。
【発明の効果】
【0017】
以上のように、本発明によれば、簡易な構成により確実に圧着処理の良否を判定できる端子圧着装置を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係る端子圧着装置を示す側面図である。
【図2】(a)〜(d)は正常な圧着処理の過程を示す正面図である。
【図3】(a)は正常な圧着処理が行われた場合に於ける電線の下降量の時間的変化を示す模式図で、(b)は正常な圧着処理がなされた電線を示す側面図である。
【図4】(a)〜(c)は圧着不良が発生した場合に於ける電線の下降量の時間的変化を示す模式図である。
【図5】(a)〜(c)はクリンパよりも先に電線がアンビルに到達した場合に於いて発生する圧着不良の過程を示す正面図である。
【図6】(a)及び(b)は圧着不良が発生した処理電線を示す側面図である。
【図7】(a)〜(c)はクリンパと電線とが下降途中に接触した場合に於いて発生する圧着不良の過程を示す正面図である。
【図8】(a)〜(c)はクリンパと電線との下降動作のタイミングが大幅にずれた場合に於いて発生する圧着不良の過程を示す正面図である。
【図9】他の実施形態に係る検出手段の配置位置を示す斜視図である。
【発明を実施するための形態】
【0019】
以下、本発明に係る端子圧着装置の一実施形態について図面に従って説明する。端子圧着装置1は、図1に示すように、上下方向に昇降自在なクリンパ2を有している。このクリンパ2の昇降手段は、サーボモータ等の駆動手段(図示せず)により回転駆動される回転軸3と、該回転軸3に固定されたカム4と、該カム4と前記クリンパ2間に設けられるリンク機構5とから構成されている。クリンパ2の正面中央には、図2各図に示すように、切溝6が上下方向に設けられており、その上端内面部は正面略逆ωの字状に形成されている。
【0020】
図1に示すように、クリンパ2の下方位置には、所定間隔を有してアンビル10が対向配置されており、該アンビル10は基台11上に固定されている。アンビル10の上面中央には、図2各図に示すように、端子Tが嵌合可能な正面略Uの状の凹溝12が形成されている。
【0021】
また、クリンパ2及びアンビル10の前方位置には、図1に示すように、電線Dを保持可能な電線保持手段20が設けられている。この電線保持手段20は、アクチュエータ21により上下方向に昇降するように構成されている。また、アクチュエータ21は制御手段により昇降のタイミングを調整することが可能であり、これによりクリンパ2の圧着動作に合わせて電線Dの下降動作のタイミングを調整できる。かかる制御手段を有することにより、線径の異なる電線Dは大きさや形状が異なる端子Tに対しても、迅速に且つ柔軟に対応できるという利点がある。
【0022】
更に、クリンパ2の前方には、電線Dの下降位置を検出する検出手段としての距離センサ30が設けられている。尚、距離センサ30の取付位置は、クリンパ2の後方でもよい。この距離センサ30は、電線D自体を直接検出するものであり、最上位置にある電線保持手段20に保持された電線Dの位置を基準として、該電線Dの下降位置が下降量として検出される。このように、電線Dを距離センサ30により直接検出させることによって、大変正確な検出結果を得ることができる。そして、距離センサ30からの出力は、制御手段としての制御部(図示せず)によりデジタル処理されて、電線Dの下降開始時から端子圧着時までの下降量の時間的変化が測定値として波形処理される。かかる測定波形データは、圧着不良が生じないものとして予め制御部に登録されている基準波形データと比較されて、圧着処理の良否が判定されることになる。尚、制御部には時間を計測する手段(タイマー)が設けられている。
【0023】
即ち、基準波形データは、図3(a)に示すように、所定幅を有する閾値を示す2本の曲線(破線)からなるものであり、処理された測定波形データが同図の如く2曲線に挟まれる範囲内にあれば、制御部により正常な圧着処理であると判定される。一方、この範囲から一部でも外れてしまうような場合は、制御部により圧着不良であると判定されることになる。但し、この所定範囲から外れた状態が所定時間継続する場合に、圧着不良であると判定したり、所定範囲から外れた状態の累積時間が所定値以上になった場合に、圧着不良であると判定するように設定してもよい他、場合によっては片側のみに閾値を設けることも可能である。
【0024】
このように一定の範囲を有する閾値を設けることにより、圧着処理の判定に関して適正な融通性を持たせることができる結果、一連の圧着作業の効率化に大いに供し得ることになる。
【0025】
尚、圧着不良と判定された処理電線Dは、分別機構(図示せず)により正常な圧着処理と判定された処理電線Dと分別されて、外部に排出されるように構成されている。また、圧着不良が発生した場合は、端子圧着装置1自体が停止するように構成することも可能である。
【0026】
本実施形態に係る端子圧着装置1は、以上のように構成されている。次に、これを使用して電線Dのストリップ部Sに端子Tを圧着する場合について説明する。
【0027】
先ず、電線Dは端子圧着装置1に所定長さ搬送供給された後、電線保持手段20により保持される。そして、この状態で電線Dはカッタ機構(図示せず)により所定の長さに切断されると共に、その端部の被覆が剥離される。その後、電線Dは電線保持手段20により保持された状態で、移送機構(図示せず)により、その先端のストリップ部Sがクリンパ2とアンビル10間の所定位置に配されるように移送される。一方、アンビル10の凹溝12には圧着すべき端子Tが嵌合した状態で搬送供給されている。
【0028】
次に、駆動手段により回転軸3、カム4及びリンク機構5を介してクリンパ2が駆動されて、図2(a)に示すように下降が開始される。その後、制御部からの信号を受けてアクチュエータ21が駆動され、電線Dは電線保持手段20に保持された状態で同図(b)に示すように下降を開始する。そして、同図(c)に示すようにクリンパ2及び電線Dが更に下降した後、両者が同図(d)に示すように略同時にアンビル10に到達する。これにより、アンビル10の凹溝12とクリンパ2の切溝6との間で、端子Tが電線Dのストリップ部Sに圧着される。
【0029】
このような一連の圧着作業に於ける電線Dの下降位置は、上述したように距離センサ30により検出されている。そして、その測定波形データが上記の如く閾値の範囲内にあり、図3(b)に示すような良好な圧着処理であると判定された場合は、圧着処理が連続して行われることになる。
【0030】
これに対して、電線Dの下降動作に起因して圧着不良が発生する場合としては、例えば図4(a)に示すように電線Dがクリンパ2よりも先にアンビル10に到達してしまうような場合と、同図(b)に示すように電線Dの下降途中でクリンパ2と接触してしまうような場合と、同図(c)に示すようにクリンパ2の下降のタイミングと電線保持手段20の動作に異常が発生し、クリンパ2の下降時には既に電線保持手段20が圧着位置から次の動作に移行しているような場合とを挙げることができる。
【0031】
図4(a)に示す場合には、例えば図5のように、電線Dと端子Tとの接触により電線Dのストリップ部Sが拡がってしまい、この状態でクリンパ2により圧着されると、図6(a)に示すような芯線漏れ圧着不良等が発生することになる。
【0032】
このような圧着不良が発生した場合は、その処理電線Dは上記の如く正常な処理電線Dと分別されることになるが、これが連続して発生するような場合は、例えば端子圧着装置1を停止させた後に、アクチュエータ21の下降動作のタイミングを僅かに遅らせるように調整を行えばよい。これにより、電線Dがクリンパ2と同時にアンビル10に到達するようにできるため、クリンパ2側の駆動系については一切調整することなく、上記のようなタイミングのずれを簡易に解消できる。その結果、圧着不良の発生を適切に回避することができる。
【0033】
また、図4(b)に示す場合には、例えば図7のように、電線Dがクランパ2により押圧されて電線Dが前後又は左右に折曲された状態で圧着されるために、図6(b)に示すように、電線Dに対する端子Tの圧着位置にばらつきが生じるという芯線位置ずれ圧着不良等が発生してしまう。
【0034】
この場合は、アクチュエータ21の下降動作のタイミングを僅かに早めるように調整を行えばよい。これにより、電線Dがクリンパ2と同時にアンビル10に到達するようにできるため、クリンパ2側の駆動系については一切調整することなく、タイミングのずれを簡易に解消できる。そして、圧着不良の発生を適切に回避することができるのである。
【0035】
更に、図4(c)に示す場合には、例えば図8のように、電線Dに端子Tは圧着されないことになる。この場合は、上記各場合のようなアクチュエータ21の位置調整の他に、電線保持手段20自身の調整作業が必要となる。
【0036】
以上で説明したように、本実施形態の係る距離センサ30による電線Dの下降位置の直接的な検出、及びその検出結果に基づく制御部による圧着処理の良否の判定という一連の検出判定手段は、端子圧着時に電線Dが下降するという方式を採る端子圧着装置1には最適なものであるということができる。
【0037】
また、本実施形態に係る端子圧着装置1は全体の構成が非常に簡易であるために、その製作も容易に且つ安価に行えるという利点もある。
【0038】
尚、電線Dの特質を考慮した場合、検出手段により直接的に検出する電線Dの部位は、端子Tが圧着されるストリップ部Sであることが好ましい。しかるに、本発明は決してこれに限定されるものではなく、ストリップ部S以外の電線Dの部位を検出対象としても構わない。
【0039】
また、距離センサ30を設ける位置も上記実施形態の如き配置位置に限定されず、例えば図9に示すように、アンビル10の前方位置に設けて下方位置から電線Dを検出したり、或いはクランパ2に直接設けるようにしてもよい。
【0040】
更に、上記実施形態に於いては、基準波形データに正常な圧着処理を示す閾値を設けたが、かかる閾値は必要に応じて設ければよいものであり、省略することも可能である。
【0041】
その他、端子圧着装置1の各部の形状等の具体的な構成も、本発明の意図する範囲内に於いて任意に設計変更自在である。
【符号の説明】
【0042】
1 端子圧着装置
2 クリンパ
10 アンビル
20 電線保持手段
D 電線
T 端子
【特許請求の範囲】
【請求項1】
昇降自在に設けられるクリンパと、該クリンパの下方に対向配置されるアンビルと、端子圧着時に電線を下降させて前記アンビルに移送すべく昇降自在に設けられる電線保持手段と、を有する端子圧着装置であって、
前記電線の下降位置を直接的に検出可能な検出手段と、
該検出手段による検出結果を測定波形データとして処理すると共に、該測定波形データと正常な圧着処理についての基準波形データとを比較することにより圧着処理の良否を判定可能な制御手段と、を備えてなることを特徴とする端子圧着装置。
【請求項2】
前記検出手段が、電線の下降位置を直接的に検出する距離センサからなる請求項1記載の端子圧着装置。
【請求項3】
前記基準波形データに正常な圧着処理を示す閾値が設けられると共に、該閾値から前記測定波形データが外れた場合には、前記制御手段が圧着不良と判定するように構成されてなる請求項1又は2記載の端子圧着装置。
【請求項1】
昇降自在に設けられるクリンパと、該クリンパの下方に対向配置されるアンビルと、端子圧着時に電線を下降させて前記アンビルに移送すべく昇降自在に設けられる電線保持手段と、を有する端子圧着装置であって、
前記電線の下降位置を直接的に検出可能な検出手段と、
該検出手段による検出結果を測定波形データとして処理すると共に、該測定波形データと正常な圧着処理についての基準波形データとを比較することにより圧着処理の良否を判定可能な制御手段と、を備えてなることを特徴とする端子圧着装置。
【請求項2】
前記検出手段が、電線の下降位置を直接的に検出する距離センサからなる請求項1記載の端子圧着装置。
【請求項3】
前記基準波形データに正常な圧着処理を示す閾値が設けられると共に、該閾値から前記測定波形データが外れた場合には、前記制御手段が圧着不良と判定するように構成されてなる請求項1又は2記載の端子圧着装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−238583(P2010−238583A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−86358(P2009−86358)
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000002358)新明和工業株式会社 (919)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000002358)新明和工業株式会社 (919)
【Fターム(参考)】
[ Back to top ]