
第1座標系に関係する医療情報をMPSシステムを使用する第2座標系において位置合わせする方法及びシステム
【課題】カテーテル挿入の容易化のため、ある座標系において取得した画像を、他の座標系において取得した画像と位置合わせする新奇の方法を提供する。
【解決手段】身体の第1位置及び方向を検出する第1医療位置決めシステム226と、第2位置及び方向を検出する第2医療位置決めシステム236と、第2イメージャ及び第2医療位置決めシステムに結合される位置合わせモジュール232とを含み、前記第1医療位置決めシステムは第1イメージャ224に関係付けられて身体の第1画像を前記第1位置及び方向と関係付ける。前記第2医療位置決めシステムは、前記第2イメージャ234に関係付けられて第2画像を前記第2位置及び方向と関係付け、前記位置合わせモジュールは、前記第1位置及び方向及び前記第2位置及び方向にしたがって、前記第1画像を前記第2画像に位置合わせする。
【解決手段】身体の第1位置及び方向を検出する第1医療位置決めシステム226と、第2位置及び方向を検出する第2医療位置決めシステム236と、第2イメージャ及び第2医療位置決めシステムに結合される位置合わせモジュール232とを含み、前記第1医療位置決めシステムは第1イメージャ224に関係付けられて身体の第1画像を前記第1位置及び方向と関係付ける。前記第2医療位置決めシステムは、前記第2イメージャ234に関係付けられて第2画像を前記第2位置及び方向と関係付け、前記位置合わせモジュールは、前記第1位置及び方向及び前記第2位置及び方向にしたがって、前記第1画像を前記第2画像に位置合わせする。
【発明の詳細な説明】
【技術分野】
【0001】
開示される技術は、一般に医療装置に関係し、特に、患者の身体の画像を取得する方法及びシステムに関する。
【背景技術】
【0002】
患者の身体において手術を行う医師は、一般に、手術中の患者の身体内における医療用介在装置(例えば、カテーテル、針)の位置及び方向を見るために、リアルタイムイメージングシステムを用いる。このようなリアルタイムイメージングシステムは、技術において既知である。これらのシステムは、一般に、ディスプレイが、患者の身体の画像において重ねられた医療用介在装置の表現を表示することを可能にする。
【0003】
バニ ハシェミ(Bani-Hashemi)他に発行され、「3次元血管造影法再構成データと他の様相の共同位置合わせに基づくX線透視検査ベース3次元神経ナビゲーション」というタイトルが付けられた米国特許第6351513号は、血管の3次元血管造影法再構成内にカテーテルのリアルタイム3次元血管造影法画像を表示する方法に向けられている。この方法は、コンピュータ断層撮影法装置によって動脈樹の3次元血管造影法画像を取得する手順と、構造的類似性(すなわち、解剖学的目印)に従って前記3次元血管造影法画像に血管の2次元X線透視検査画像を位置合わせする手順とを含む。
【0004】
前記方法は、X線装置を使用することによってカテーテルの突き出たラインを決定する手順と、前記3次元血管造影法画像を前記突き出たラインと交差させ、前記カテーテルの3次元再構成の3次元視覚化を前記血管の3次元血管造影法再構成内に表示することによって、前記カテーテルの位置を決定する手順とをさらに含む。前記カテーテルの3次元視覚化は、前記カテーテルが移動するにつれて更新される。
【0005】
ベン ハイム(Ben-Haim)他に発行され、「マッピングボリュームを拡張したX線誘導外科位置システム」というタイトルが付けられた米国特許第6314310号は、患者の脊椎の選択された位置に針を挿入するシステムに向けられている。このシステムは、基準要素と、複数の磁界発生コイルと、ドライバ回路網と、コンピュータと、ユーザインタフェース制御部と、ディスプレイと、蛍光顕微鏡と、コンピュータ断層放射線写真(CT)装置とを含む。前記基準要素は、可視光及びX線に対して透明なプラスチックディスクの形態であり、その周辺における3つの等しく間隔をあけた金属基準マークと、その中心における第1位置及び方向検出装置と、前記第1位置及び方向検出装置に隣接する他の基準マークとを含む。前記針は、第2位置及び方向検出装置を含む。
【0006】
前記磁界発生コイルは、患者が横たわるベッド上に又はこれに隣接して置かれる。前記蛍光顕微鏡は、患者の身体の一方の側から患者にX線を照射する。前記コンピュータは、本システムの多くの態様を制御する。前記第1位置及び方向検出装置と前記第2位置及び方向検出装置とは、前記磁界発生コイルによって発生される時間変化する磁界の個々の信号を前記コンピュータに送る。前記コンピュータは前記信号を解析し、前記磁界発生コイルによって規定される基準の共通フレームに対する前記第1位置及び方向検出装置及び前記第2位置及び方向検出装置の6次元位置及び方向座標を決定する。前記コンピュータは、前記ディスプレイが、脊椎の画像と、前記第1位置及び方向検出装置及び前記第2位置及び方向検出装置の表現と、前記針及び基準マークの表現とを表示することを可能にする。前記基準要素の位置及び角度方向とは、前記基準マークの2次元座標を決定することによって決定される。スケーリング係数は、前記決定される座標を前記基準マークの既知の位置と比較することによって、前記ディスプレイにおいて表示される画像に関して決定される。
【0007】
患者の身体のCT画像を取得する間、前記基準要素は前記身体に固定され、手術中、この位置において前記身体に固定されたままである。前記CT画像は、前記CT画像において現れる前記基準要素の基準マークの画像派生座標を、前記X線画像における基準マークの画像派生座標と比較することによって、前記X線画像と位置合わせされる。前記基準要素の基準マークと、前記X線画像における基準マークとは、可視マークである。前記3次元CT画像は、前記CT画像を前記X線画像と位置合わせするために、回転又は拡大縮小され、前記CT画像は、前記X線画像の面上に投影され、前記X線画像に重ねられるか、前記X線画像と並んで表示される。
【0008】
クス(Kuth)他に発行され、「磁気共鳴システムによる被写体の画像を重ね合わせる方法と、前記方法を実現するための磁気共鳴システム」というタイトルが付けられた米国特許第6421551号は、患者の身体の画像の断層写真面を再調整するシステムに向けられている。このシステムは、制御コンソールと、磁気共鳴システムと、立体鏡映像カメラと、マーキング要素とを含む。前記制御コンソールは、制御ユニットと、画像データ発生器及びプロセッサと、座標変換ユニットと、再調整ユニットと、断層写真選択ユニットとを含む。前記磁気共鳴システムは、互いに向かい合って位置する2個のポールシューを含む。
【0009】
前記制御コンソールは、前記磁気共鳴システム及び前記立体鏡映像カメラに接続される。前記マーキング要素は、3個の反射性ボールから成り、第1座標系においてひざ関節の領域において患者に配置される。前記立体鏡映像カメラは、前記反射性ボールの画像を取得し、個々の位置データを前記制御コンソールに送る。前記座標変換ユニットは、前記位置データを、前記第1座標系から前記磁気共鳴システムの第2座標系に変換する。患者の相対的運動がわかっている場合、前記再調整ユニットは、以前に規定された断層写真面を、以前の関節位置においてあったように、再び前記ひざ関節に関するマーキング要素に対して位置するように再調整する。
【0010】
患者における腫瘍を破壊し、転移を防ぐある方法は、目標組織に放射線治療を施すことによる。ある形式の放射線治療は線形加速として知られ、これによって、X線又は電子のビームは、異なった方向から目標組織に向けられる。線形加速器がビームを目標組織の方向に向けるたびに、照射ビームの経路に沿った目標組織の周囲の健康な組織にも照射する。したがって、このような周囲の組織は、目標組織よりも少なく照射される。
【0011】
前記線形加速器は、目標組織の形状と一般的に同様な特定の体積を照射するようにプログラムされる。したがって、目標組織を含む身体の部分は、目標組織が前記特定の体積内に位置されるように配置されなければならない。従来の線形加速処理は、通常は数日又は数週間の期間に渡る複数の反復する手順を含む。その都度、目標組織を含む身体の部分は、最初の処理において配置されたように正確に配置されなければならない。
【0012】
この目的のために、最初の照射セッション中、目標組織を含む身体の部分を照射に適切な位置において配置した後、複数の危険でないレーザビーム、例えば4本のレーザビームが、固定された位置から身体の前記部分の方向に向けられる。これらの4つの点は、永続的なマーカ、例えば耐水性マーカによって、患者の皮膚においてマークされる。すべてのその後のセッションにおいて、身体の前記部分は、同じ4本のレーザビームを身体の同じ部分の方向に向け、前記4つの永続的なマークが前記4本のレーザビームと一列に並ぶまで前記部分を再位置決めすることによって、最初のセッションにおいて決定された位置及び方向に再位置決めされる。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】米国特許第6351513号明細書
【特許文献2】米国特許第6314310号明細書
【特許文献3】米国特許第6421551号明細書
【発明の概要】
【発明が解決しようとする課題】
【0014】
開示される技術の目的は、ある座標系において取得された画像を、他の座標系において取得された他の画像と位置合わせする新奇の方法及びシステムを提供することである。
【課題を解決するための手段】
【0015】
開示される技術によれば、第1画像を第2画像と位置合わせするシステムがこのようにして提供される。本システムは、患者の身体の第1位置及び方向を検出する第1医療位置決めシステムと、前記からだの第2位置及び方向を検出する第2医療位置決めシステムと、位置合わせモジュールとを含む。前記位置合わせモジュールは、第2イメージャと、前記第2医療位置決めシステムとに結合される。
【0016】
前記第1医療位置決めシステムは、第1イメージャに関係付けられ、これに結合される。前記第1イメージャは、前記身体から前記第1画像を取得し、前記第1画像を前記第1位置及び方向と関係付けることによって前記第1画像を発生する。前記第2医療位置決めシステムは、前記第2イメージャに関係付けられ、これに結合される。前記第2イメージャは、前記第2画像を取得し、前記第2画像に前記第2位置及び方向に関係付ける。前記位置合わせモジュールは、前記第1位置及び方向と前記第2位置及び方向にしたがって、前記第1画像を前記第2画像と位置合わせする。
【0017】
加えて、本システムは、前記第1イメージャと前記位置合わせモジュールとに結合される画像データベースを含むことができる。前記第1イメージャは、前記第1座標系において取得された前記第1画像の個々のデータを前記画像データベースに格納し、前記位置合わせモジュールは、前記第1画像を前記第2画像と位置合わせするために、このデータを前記画像データベースから検索する。
【0018】
開示される技術の他の態様によれば、第1画像を第2画像と位置合わせする方法がこのようにして提供される。本方法は、第1座標系における患者の身体の第1位置及び方向を第1医療位置決めシステムによって検出する手順と、前記第1座標系における前記第1画像の座標の第1の集合を決定する手順とを含む。
【0019】
本方法は、第2座標系における前記身体の第2位置及び方向を、第2医療位置決めシステムによって検出する手順と、前記第2座標系における前記第2画像の座標の第2の集合を決定する手順とをさらに含む。本方法は、前記座標の第1の集合を前記座標の第2の集合と位置合わせする手順をさらに含む。
【0020】
開示される技術の他の態様によれば、患者の身体の一部を、多数の治療セッション中、前記身体の選択された組織を自動的に医学的に治療する治療装置に適切な同じ治療位置及び方向において再位置決めする装置がこのようにして提供される。本システムは、位置決めユーザインタフェースと、位置及び方向検出器と、医療位置決めシステムとを含む。
【0021】
前記位置及び方向検出器は、前記選択された組織に関係付けられた選択された位置において配置される。前記医療位置決めシステムは、記憶ユニットと、前記位置決めユーザインタフェースと、位置及び方向検出器とに結合される。前記医療位置決めシステムは、前記位置及び方向検出器の初期位置及び方向を検出し、その間、前記選択された組織は、治療位置及び方向において配置される。前記医療位置決めシステムは、前記位置決めユーザインタフェースを介して、前記位置及び方向検出器が前記初期位置及び方向において再び配置されるときを示し、これによって、前記選択された組織が前記治療位置及び方向において再び配置されることを確立する。
【0022】
開示される技術の他の態様によれば、多セッション自動治療手順中、患者の身体の一部を再位置決めする方法がこのようにして提供される。本方法は、位置及び方向検出器の初期位置及び方向を検出する手順と、前記初期位置及び方向を記録する手順とを含む。本方法は、各々の反復する医学的治療の開始時において、前記位置及び方向検出器の現在の位置及び方向を検出する手順と、前記現在の位置及び方向が前記記録された位置及び方向と実質的に同じであるか否かを示す手順とをさらに含む。前記初期位置及び方向は、前記身体の選択された組織を自動的に治療するのに好適な治療位置及び方向に関係付けられる。
【0023】
開示される技術の他の態様によれば、患者の身体内の選択された組織を医学的に治療するシステムがこのようにして提供される。本システムは、第1医療位置決めシステムと、第2医療位置決めシステムと、前記第2医療位置決めシステムと治療装置とに結合される位置合わせモジュールとを含む。
【0024】
前記第1医療位置決めシステムは、位置及び方向検出器が該第1医療位置決めシステムに結合される場合、第1座標系における前記位置及び方向検出器の第1位置及び方向を検出する。前記位置及び方向検出器は、前記選択された組織に関係付けられた選択された位置において配置される。前記第2医療位置決めシステムは、前記位置及び方向検出器が該第2医療位置決めシステムに結合される場合、第2座標系における前記位置及び方向検出器の第2位置及び方向を検出する。
【0025】
前記位置合わせモジュールは、前記第1座標系における前記選択された組織の座標の集合を、前記第2座標系と位置合わせし、ここで、前記座標の集合は、前記第1位置及び方向に関係付けられる。前記治療装置は、前記位置合わせされた座標の集合にしたがって、前記選択された組織を医学的に治療する。
【0026】
開示される技術の他の態様によれば、患者の身体内の選択された組織を医学的に治療する方法がこのようにして提供される。本方法は、第1医療位置決めシステムによって第1座標系における検出器の第1位置及び方向を検出する手順と、前記第1座標系における前記選択された組織の座標の集合を前記第1位置及び方向に関係付ける手順とを含む。
【0027】
本方法は、第2医療位置決めシステムによって第2座標系における前記検出器の第2位置及び方向を検出する手順と、前記第2位置及び方向にしたがって、前記関係付けられた座標の集合を前記第2座標系に位置合わせする手順とをさらに含む。前記検出器は、前記選択された組織に関係付けられた選択された位置において配置される。
【0028】
開示される技術の他の態様によれば、イメージャを移動メカニズムによって、患者の身体のセクションに関して所望の方向に調節し、前記身体のセクションの視覚的表現を取得するシステムがこのようにして提供される。前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含む。前記医療用介在装置は、前記患者の身体のセクション中に挿入される。
【0029】
本システムは、医療位置決めシステムと、前記医療位置決めシステム及び前記移動メカニズムに結合されるプロセッサと、前記医療用改造装置に前記興味ある部分において結合され、前記医療位置決めシステムに結合される装置位置及び方向検出器とを含む。前記医療位置決めシステムは、前記装置位置及び方向検出器の装置位置及び方向を検出する。前記医療位置決めシステムは、前記装置位置及び方向を前記プロセッサに供給する。前記プロセッサは、前記装置位置及び方向にしたがって所望の方向を決定し、前記プロセッサは、前記移動メカニズムに命令し、前記イメージャを前記所望の方向に移動させる。
【0030】
加えて、本システムは、前記イメージャ及び前記医療位置決めシステムに結合されるイメージャ位置及び方向検出器を具えることができる。前記医療位置決めシステムは、前記イメージャのイメージャ位置及び方向を検出し、前記イメージャ位置及び方向を前記プロセッサに供給する。前記プロセッサは、前記所望の方向を、前記装置位置及び方向と前記イメージャ位置及び方向とにしたがって決定する。
【0031】
開示される技術の他の態様によれば、イメージャを所望の方向へ調節し、患者の身体のセクションの視覚的表現を取得する方法がこのようにして提供される。前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含む。本方法は、前記興味ある部分において前記医療用介在装置に結合される位置及び方向検出器の装置位置及び方向を検出する手順と、前記イメージャが前記視覚的表現を取得できるように、前記装置位置及び方向にしたがって所望の方向を決定する手順とを含む。本方法は、移動メカニズムに命令し、前記イメージャを前記所望の方向に移動させる手順をさらに含む。本方法は、前記イメージャに結合されるイメージャ位置及び方向検出器のイメージャ位置及び方向を検出する手順と、前記イメージャ位置及び方向から前記イメージャの位置及び方向を決定する手順とをさらに含むことができる。
【図面の簡単な説明】
【0032】
【図1A】開示される技術の一実施例にしたがって構成され動作する、第1イメージャによって取得された第1画像を第2イメージャによって取得された第2画像と位置合わせするシステムの図式的な図解である。
【図1B】図1Aのシステムの前記第1画像を取得する部分の図式的な図解である。
【図1C】図1Aのシステムの前記第2画像を取得し、前記第1画像を前記第2画像と位置合わせする他の部分の図式的な図解である。
【図1D】図1Aのシステムの第1医療位置決めシステム(MPS)及び第2MPSの各々の図式的な図解である。
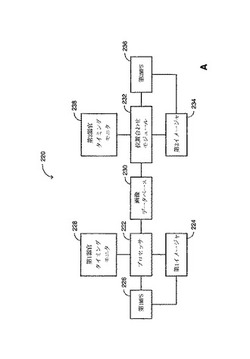
【図2A】開示される技術の他の実施例にしたがって構成され動作する、第1再生画像を、第2イメージャによって取得された第2画像と位置合わせするシステムの図式的な例示である。
【図2B】前記第1再生画像を複数の2次元画像から再生する、図1Aのシステムの一部の図式的な例示である。
【図2C】前記第2画像を取得し、前記第1再生画像を前記第2画像と位置合わせする、図1Aのシステムの他の部分の図式的な例示である。
【図2D】医療用介在装置に取り付けられる画像検出器によって前記第2画像を取得する、図1Aのシステムの部分の図式的な例示である。
【図3A】患者の身体において配置され、開示される技術の他の実施例にしたがって、画像のスケールファクタを決定する2個の身体位置及び方向検出器の図式的例示である。
【図3B】図1Aの第1イメージャと同様の第1イメージャによって取得される患者の身体の第1画像の図式的な例示である。
【図3C】図1Aの第2イメージャと同様の第2イメージャによって取得される患者の身体の第2画像の図式的な例示であり、前記第2画像のスケールは、図3Bの第1画像のスケールと異なる。
【図3D】図3Cの第2画像のスケールに従って修正された図3Bの第1画像の図式的な例示である。
【図4】開示される技術の他の実施例にしたがって構成され動作する、第1MPS及び第2MPSが一般に390で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である。
【図5】開示される技術の他の実施例にしたがって構成され動作する、前記第1MPS及び前記第2MPSの各々が、一般に430で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である。
【図6】開示される技術の他の実施例にしたがって動作する、図1Aのシステムを動作する方法の図式的な例示である。
【図7】開示される技術の他の実施例に従って構成され動作する、複数の異なった治療セッション中に患者の選択された組織を医療的に治療するシステムの図式的な例示である。
【図8】開示される技術の他の実施例にしたがって動作する、図7のシステムを動作する方法の図式的な例示である。
【図9A】開示される技術の他の実施例に従って構成され動作する、イメージャの座標系において規定された選択された組織の境界を、治療装置の座標系と位置合わせするシステムの図式的な例示である。
【図9B】図9Aのシステムの照射計画部分の図式的な例示である。
【図9C】図9Aのシステムの照射治療部分の図式的な例示である。
【図10】開示される技術の他の実施例にしたがって動作する、図9Aのシステムを動作する方法の図式的例示である。
【図11】開示される技術の他の実施例にしたがって構成され動作する、医療用介在装置の画像を取得するシステムの図式的な例示である。
【図12】開示される技術の他の実施例にしたがって動作する、図11のシステムを動作する方法の図式的な例示である。
【発明を実施するための形態】
【0033】
開示される技術は、先行技術の欠点を、非視覚的位置合わせシステム及び方法を提供することによって克服する。開示される技術の方法は、基本的に、第1座標系における第1画像の座標を非視覚的に決定する手順と、第2座標系における第2画像の座標を非視覚的に決定する手順と、前記決定された座標にしたがって前記第1画像を前記第2座標系に位置合わせする手順とを含む。前記第1座標系のスケーリングと前記第2座標系のスケーリングとが同じでない場合、前記第1画像のスケールを前記第2画像のスケールに一致するように変更し、前記第1画像及び第2画像が一緒に示される場合、これらが同じスケールであるようにする。さらに、カテーテル、針、鉗子等の医療用介在装置の表現は、前記医療用介在装置に取り付けられる検出器を介して前記医療用介在装置の位置及び方向を検出することによって、前記第1画像に重ねられることができる。
【0034】
以下の記述において、座標系は、直交、極、円柱等であってもよい。以下の用語“画像”は、直接取得されるか、生の測定値から再構成された、患者の身体の選択された部分のどのような形式の視覚的表現にも関係することに注意されたい。このような画像は、1、2又は3次元、静止画像、又は時間において展開する画像において提供されることができる。以下に言及されるMPSシステムのいずれもが、これらに関係付けられる装置又はシステムに、物理的(すなわち、これらに関して固定された位置において)又は論理的(すなわち、同じ座標系内で双方が協調する場合)に結合されてもよいことに注意されたい。以下の記述において、医療用介在装置は、カテーテル(例えば、バルーンカテーテル、ステントカテーテル、外科用カテーテル、希釈カテーテル)、薬剤供給ユニット(例えば、針、コーティングされたステント又はバルーンを有するカテーテル、小線源照射療法ユニット)、組織切断ユニット(例えば、鉗子、アブレーションカテーテル)等であってもよい。
【0035】
ここで、図1A、1B、1C及び1Dを参照する。図1Aは、開示される技術の一実施例にしたがって構成され動作する、一般に100で示される、第1イメージャによって取得された第1画像を第2イメージャによって取得された第2画像と位置合わせするシステムの図式的な図解である。図1Bは、図1Aのシステムの前記第1画像を取得する部分の図式的な図解である。図1Cは、図1Aのシステムの前記第2画像を取得し、前記第1画像を前記第2画像と位置合わせする他の部分の図式的な図解である。図1Dは、一般に180で示される、図1Aのシステムの第1医療位置決めシステム(MPS)及び第2MPSの各々の図式的な図解である。
【0036】
図1Aの参照と共に、システム100は、第1MPS102と、第1イメージャ104と、画像データベース106と、第2イメージャ108と、第2MPS110と、位置合わせモジュール112とを含む。第1MPS102及び第2MPS110の各々は、3次元ボディ(図示せず)の位置及び方向を、前記3次元ボディに取り付けられる位置及び方向検出器(図示せず)から受信される信号にしたがって決定する装置である。第1MPS102及び第2MPS110の各々は、参照によってここに含まれる米国特許第6233476号のMPSと同様である。第1MPS102及び第2MPS110の各々は、複数の検出器から受信される信号において三角形分割操作を行うことによって3次元ボディの位置及び方向を決定する位置及び方向決定装置に置き換えることができる。これらの代わりの位置及び方向決定装置は、図4及び5に関して以下に説明される。
【0037】
画像データベース106は、磁気メモリユニット(例えば、フロッピー(登録商標)ディスク、ハードディスク、磁気テープ)、光メモリユニット(例えば、コンパクトディスク)、揮発性電子メモリユニット(例えば、ランダムアクセスメモリ)、不揮発性電子メモリユニット(例えば、読み出し専用メモリ、フラッシュメモリ)、リモートネットワーク記憶ユニット等のようなデータ記憶ユニットである。第1イメージャ104及び第2イメージャ108の各々は、患者の身体(図示せず)の画像を取得する装置(例えば、蛍光透視法、超音波、核磁気共鳴−NMR、光学イメージング、サーモグラフィ、核イメージング−PET)である。位置合わせモジュール112は、前記第1画像を前記第2画像と位置合わせするモジュールである。
【0038】
第1イメージャ104は、第1MPS102及び画像データベース106に結合される。第2イメージャ108は、第2MPS110に結合される。位置合わせモジュール112は、画像データベース106、第2イメージャ108及び第2MPS110に結合される。
【0039】
代わりに、本システムは、各々がMPSシステムに関係付けられ、すべてがネットワーク(例えば、LAN、WAN、有線又は無線)を経て一緒に結合される複数の医療システム(例えば、イメージャ、自動治療システム)を含む。これらのMPSシステムの各々は、これらと関係する個々の医療システムと空間的にキャリブレートされ、双方が同じ座標系を共有するか、前記医療システムの座標系と前記MPSシステムの座標系との間で変換できるようにされることに注意されたい。
【0040】
図1Bの参照と共に、身体位置及び方向検出器130は、患者132の身体に取り付けられる。身体位置及び方向検出器130は、参照によってここに含まれる米国特許第6233476号のセンサと同様である。身体位置及び方向検出器130は、患者132の肌(図示せず)に取り付けられるか、肌の下に配置されるか、患者132の身体内に埋め込まれる。このようにして、身体位置及び方向検出器130は、患者132の身体に固定される。第1MPS102は、身体位置及び方向検出器130と第1イメージャ104とに結合される。第1イメージャ104は、画像データベース106に結合される。
【0041】
第1MPS102は、X1、Y1、Z1座標系(すなわち座標系I)に関係付けられる。第1イメージャ104は、第1イメージャ104の位置及び方向が座標系Iに関して規定されるように、第1MPS102とキャリブレートされる。身体位置及び方向検出器130は、その位置及び方向の個々の信号を第1MPS102に供給する。第1MPS102は、座標系Iにおける身体位置及び方向検出器130の位置及び方向を、身体位置及び方向検出器130から受けた信号にしたがって決定する。第1MPS102は、身体位置及び方向検出器130の位置及び方向の個々の信号を第1イメージャ104に供給する。第1イメージャ140は、患者132の身体の第1画像134を取得し、座標系Iにおける第1画像134の座標の集合と、座標系Iにおける身体位置及び方向検出器130の座標と共に、画像データベース106に記憶する。
【0042】
一般に、システム100のこの部分(すなわち、患者132の身体から第1画像134を取得する段階)は、患者132における医療操作を行う前に行われる。したがって、図1Bにおいて例示されるような画像取得段階は、図1Cにおいて例示されるような画像取得及び医療操作段階とは異なった物理的位置において行われ得る。
【0043】
図1Cの参照と共に、第2MPS110は、体位置及び方向検出器130と、装置位置及び方向検出器154と、第2イメージャ108と、位置合わせモジュール112とに結合される。位置合わせモジュール112は、画像データベース106及び第2イメージャ108に結合される。
【0044】
臨床スタッフは、患者132において医療操作を行う間、第2イメージャ108は、患者132の身体の第2画像(例えば、第2画像150)を取得する。第2MPS110は、X2、Y2、Z2座標系(すなわち座標系II)に関係付けられる。第2イメージャ108は、第2イメージャ108の位置及び方向が座標系IIに関して規定されるように、第2MPS110とキャリブレートされる。
【0045】
身体位置及び方向検出器130は、その位置及び方向の個々の信号を第2MPS110に供給する。第2MPS110は、座標系IIにおける身体位置及び方向検出器130の位置及び方向を、身体位置及び方向検出器130から受けた信号にしたがって決定する。第2MPS110は、身体位置及び方向検出器130の位置及び方向の個々の信号を第2イメージャ108に供給する。第2イメージャ108は、座標系IIにおける第2画像150の座標の集合を、座標系IIにおける位置及び方向検出器130の位置及び方向と関係付け、個々の信号を位置合わせモジュール112に供給する。
【0046】
位置合わせモジュール112は、画像データベース106から、座標系Iにおける第1画像134の座標の集合と、座標系Iにおける身体位置及び方向検出器130の座標との個々のデータを取り出す。位置合わせモジュール112は、座標系Iにおける身体位置及び方向検出器130の位置及び方向を、座標系IIにおける身体位置及び方向検出器130の位置及び方向と位置合わせする。この方法において、位置合わせモジュール112は、元は座標系Iにおいて取得された第1画像134を座標系IIと位置合わせし、第1画像134及び第2画像150の双方が同じ座標系II内で一緒に表されることができるようにする。位置合わせモジュール112は、位置及び方向検出器を用いることによって、どのような可視マークもなしで、第1画像134を第2画像150と位置合わせすることに注意されたい。
【0047】
座標系Iのスケールが座標系IIのスケールと正確に同じでない場合において、位置合わせモジュール112は、第1画像134のスケールを、座標系Iと座標系IIとの間のスケールファクタに従って変更することができる。このスケールファクタは、位置合わせモジュール112において記憶される。この目的のため、図3Aに関係して後述されるように、身体位置及び方向検出器130と同様の2個以上の位置及び方向検出器が用いられることができる。
【0048】
身体位置及び方向検出器130は、患者132の身体における選択された点又は身体の中に固定され、患者132の身体に対して同じ位置及び方向を実質的に保つ。身体位置及び方向検出器130は、身体位置及び方向検出器130を第1MPS102から分離し、体位置及び方向検出器130を第2MPS110に接続するために、有線であってもよく、コネクタ(図示せず)を含むことができる。代わりに、身体位置及び方向検出器130は、無線であってもよい。
【0049】
第2イメージャ108による画像取得前、又は画像取得中、医療用介在装置152は、患者132の体内に挿入されてもよい。装置位置及び方向検出器154は、医療用介在装置152に結合される。図1Cにおいて上述した例において、医療用介在装置154はカテーテルであり、装置位置及び方向検出器154は、前記カテーテルの遠位端において配置される。図1Aにおいて上述した例において、第1イメージャ104はCT装置であり、第2イメージャ108はX線装置である。
【0050】
装置位置及び方向検出器154は、前記カテーテルの遠位端の位置及び方向の個々の信号を第2MPS110に供給する。第2MPS110は、座標系IIにおける前記カテーテルの遠位端の位置及び方向を、装置位置及び方向検出器154から受けた信号にしたがって決定する。第2MPS110は、前記カテーテルの遠位端の位置及び方向の個々の信号を位置合わせモジュール112に供給する。
【0051】
図1Cの例において、第2イメージャ108はX線装置であり、前記カテーテルは放射エネルギーを通さない材料で形成され、第2画像150は、前記カテーテルのリアルタイム画像並びに患者132の身体の画像を含む。
【0052】
位置合わせモジュール112を、単に座標を座標系Iから座標系IIに変換及びスケーリングするか、画像処理を行う(例えば、画像を重ね、装置の視覚的表現を加える)ように適合させることができる。例えば、位置合わせモジュール112は、第2MPS110から受けた信号にしたがって、医療用介在装置152の遠位端のリアルタイム表現158を第1画像134に重ねることができる。位置合わせモジュール112は、第1画像134及び第2画像150の個々のビデオ信号をディスプレイ(図示せず)に供給し、前記ディスプレイは、第1画像134を第2画像150と一緒に表示する。このようにして、臨床スタッフは、第2画像150における医療用介在装置152のリアルタイム画像156を、第1画像134における医療用介在装置152のリアルタイム表現158と一緒に見ることができる。
【0053】
他の例において、位置合わせモジュール112は、第1画像134を座標系IIにおいて位置合わせした後に、第1画像134を第2画像150に重ねる。この場合において、重ね合わされた画像(図示せず)は、前記第1画像と、前記第2画像と、前記医療用介在装置のリアルタイム画像又は前記医療用介在装置のリアルタイム視覚的表現とを含む。
【0054】
図1Dの参照と共に、MPS180は、位置及び方向プロセッサ182と、送信機インタフェース184と、複数のルックアップテーブルユニット1861、1862及び1863と、複数のデジタルアナログ変換器(DAC)1881、1882及び1883と、増幅器190と、送信機192と、複数のMPSセンサ(すなわち、位置及び方向検出器)1941、1942、1943及び194Nと、複数のアナログデジタル変換器(ADC)1961、1962、1963及び196Nと、センサインタフェース198とを含む。
【0055】
送信機インタフェース184は、位置及び方向プロセッサ182と、ルックアップテーブルユニット1861、1862及び1863とに結合される。DACユニット1881、1882及び1883は、ルックアップテーブル1861、1862及び1863のそれぞれ1つと、増幅器190とに結合される。増幅器190は、さらに送信機192に結合される。送信機192は、TXとも記される。MPSセンサ1941、1942、1943及び194Nは、さらに各々RX1、RX2、RX3及びRXNと記される。
【0056】
アナログデジタル変換器(ADC)1961、1962、1963及び196Nは、各々、センサ1941、1942、1943及び194Nと、センサインタフェース198とに結合される。センサインタフェース198は、さらに、位置及び方向プロセッサ182に結合される。
【0057】
ルックアップテーブルユニット1861、1862及び1863の各々は、周期的な数列を発生し、個々のDACユニット1881、1882及び1883に供給し、個々のDACユニット1881、1882及び1883は、前記周期的な数列を個々のアナログ信号に変換する。前記アナログ信号の各々は、それぞれ異なった空間軸である。本例において、ルックアップテーブル1861及びDACユニット1881はX軸に関する信号を発生し、ルックアップテーブル1862及びDACユニット1882はY軸に関する信号を発生し、ルックアップテーブル1863及びDACユニット1883はZ軸に関する信号を発生する。
【0058】
DACユニット881、1882及び1883は、これらの個々のアナログ信号を増幅器190に供給し、増幅器190は前記アナログ信号を増幅し、増幅された信号を送信機192に供給する。送信機192は、多軸電磁界を供給し、この多軸電磁界は、MPSセンサ1941、1942、1943及び194Nによって検出されることができる。MPSセンサ1941、1942、1943及び194Nの各々は、電磁場を検出し、個々の電気アナログ信号を発生し、これらに結合される個々のADCユニット1961、1962、1963及び196Nに供給する。ADCユニット1961、1962、1963及び196Nの各々は、これらに供給される前記アナログ信号をデジタル化し、数列に変換し、センサインタフェース198に供給し、センサインタフェース198は、この数列を位置及び方向プロセッサ182に供給する。
【0059】
位置及び方向プロセッサ182は、受けた数列を解析し、これによって、MPSセンサ1941、1942、1943及び194Nの各々の位置及び方向を決定する。位置及び方向プロセッサ182は、さらに、歪みイベントを決定し、ルックアップテーブル1861、1862及び1863を適宜更新する。
【0060】
開示される技術の他の態様によれば、プロセッサは、第1イメージャによって取得される複数の2次元画像を、第1器官タイミングモニタによって取得される器官タイミング信号(例えば、ECG)における各々の2元画像の位置と関係付ける。前記プロセッサは、各々の前記2次元画像の個々の位置及び方向と、前記器官タイミング信号内のその位置とにしたがって、前記2次元画像から複数の3次元画像を再構成し、前記プロセッサは、前記再構成された3次元画像を画像データベースに記憶する。位置合わせモジュールは、第2器官タイミングモニタによって検出された現在時点に従って前記画像データベースから3次元画像を取り出し、前記位置合わせモジュールは、前記取り出された3次元画像を、第2イメージャによって取得された他の画像と位置合わせする。
【0061】
ここで、図2A、2B、2C及び2Dを参照する。図2Aは、開示される技術の他の実施例にしたがって構成され動作する、第1再生画像を、第2イメージャによって取得された第2画像と位置合わせする、一般に220で示されるシステムの図式的な例示である。図2Bは、前記第1再生画像を複数の2次元画像から再生する、図2Aのシステムの一部の図式的な例示である。図2Cは、前記第2画像を取得し、前記第1再生画像を前記第2画像と位置合わせする、図2Aのシステムの他の部分の図式的な例示である。図2Dは、医療用介在装置に取り付けられる画像検出器によって前記第2画像を取得する、図2Aのシステムの部分の図式的な例示であり、前記システムのこの部分は、前記第1再生画像を前記第2画像と位置合わせする。
【0062】
図2Aの参照と共に、システム220は、プロセッサ222と、第1イメージャ224と、第1MPS226と、第1器官タイミングモニタ228と、画像データベース230と、位置合わせモジュール232と、第2イメージャ234と、第2MPS236と、第2器官タイミングモニタ238とを含む。プロセッサ222は、参照によってここに含まれる米国特許出願第09/782528号のメインコンピュータと同様である。第1イメージャ224及び第2イメージャ234は、図1Aの参照と共に上述した第1イメージャ104及び第2イメージャ108と同様である。第1器官タイミングモニタ228及び第2器官タイミングモニタ238の各々は、心臓、肺、まぶた等のような検査される器官のパルスレートを監視する装置である。第1MPS226及び第2MPS236の各々は、図1Dの参照と共に上述したMPS180と同様である。
【0063】
プロセッサ222は、第1イメージャ224と、第1MPS226と、第1器官タイミングモニタ228と、画像データベース230とに結合される。第1イメージャ224は、第1MPS226に結合される。位置合わせモジュール232は、第2イメージャ234と、第2MPS236と、第2器官タイミングモニタ238と、画像データベース230とに結合される。第2イメージャ234は、第2MPS236に結合される。
【0064】
図2Bの参照と共に、器官タイミングモニタ260は、身体位置及び方向検出器130(図1B)が患者132の身体に取り付けられる方法におけるのと同様に、患者262の身体に取り付けられる。第1パルスセンサ264は、心臓、肺、まぶた等のような患者262の器官(図示せず)に取り付けられる。器官タイミングセンサ260は、第1MPS226に結合される。第1パルスセンサ264は、第1器官タイミングモニタ228に結合される。プロセッサ222は、第1イメージャ224と、第1MPS226と、第1器官タイミングモニタ228と、画像データベース230とに結合される。第1イメージャ224は、第1MPS226に結合される。
【0065】
第1MPS226は、器官タイミングセンサ260から受けた信号にしたがって、X1、Y1、Z1座標系(すなわち、座標系I)における器官タイミングセンサ260の位置及び方向を決定する。第1MPS226は、決定された器官タイミングセンサ260の位置及び方向の個々の信号をプロセッサ222及び第1イメージャ224に供給する。第1イメージャ224は、患者262の身体から複数の2次元画像を取得し、取得された2次元画像の各々を、決定された器官タイミングセンサ260の位置及び方向と関係付ける。第1イメージャ224は、関係付けられた2次元画像の個々の信号をプロセッサ222に供給する。第1器官タイミングモニタ228は、第1パルスセンサ264から受けた信号にしたがって、患者262の器官のタイミング信号を決定し、第1器官タイミングモニタ228は、前記タイミング信号の個々の信号をプロセッサ222に供給する。前記タイミング信号は、例えば、心臓(図示せず)のQRS波であってもよい。
【0066】
プロセッサ222は、前記2次元画像の各々を、前記タイミングシングの現在時間点と関係付ける。プロセッサ222は、器官タイミングセンサ260の位置及び方向と、前記タイミング信号の時間点とにしたがって、前記2次元画像から複数の3次元画像を再構成する。プロセッサ222は、前記再構成された3次元画像を画像データベース230に記憶する。
【0067】
図2Cの参照と共に、位置合わせモジュール232は、第2イメージャ234と、第2MPS236と、第2器官タイミングモニタ238と、画像データベース230とに結合される。第2イメージャ234は、第2MPS236に結合される。器官タイミングセンサ260及び装置位置及び方向検出器282は、第2MPS236に結合される。第2パルスセンサ284は、第2器官タイミングモニタ238に結合される。
【0068】
医療用介在装置280は、患者262の体内に挿入される。図2Cにおいて示した例において、医療用介在装置280はカテーテルである。装置位置及び方向検出器282は、医療用介在装置280の遠位端において配置される。装置位置及び方向検出器282は、医療用介在装置280の遠位端の位置及び方向を検出する。第2パルスセンサ284は、患者262の、第1パルスセンサ264が取り付けられるのと同じ器官に取り付けられる。第1パルスセンサ264及び第1器官タイミングモニタ228は、各々、第2パルスセンサ284及び第2器官タイミングモニタ238の代わりに、図2Cの実施例において用いられることができることが注意される。
【0069】
第2MPS236は、器官タイミングセンサ260から受けた信号にしたがって、X2、Y2、Z2座標系(すなわち、座標系II)における器官タイミングセンサ260の位置及び方向を決定する。第2MPS236は、さらに、装置位置及び方向検出器282から受けた信号にしたがって、医療用介在装置280の遠位端の位置及び方向を決定する。第2MPS236は、決定された器官タイミングセンサ260の位置及び方向の各々の信号を、位置合わせモジュール232及び第2イメージャ234に供給する。第2MPS236は、決定された医療用介在装置280の遠位端の位置及び方向の個々の信号を、位置合わせモジュール232に供給する。
【0070】
第2イメージャ234は、患者262の身体から第2画像(例えば、図2Cにおいて例示されるような第2画像286)を取得し、前記第2画像を、決定された患者262の身体の位置及び方向に関係付ける。第2イメージャ234は、前記関係付けられた第2画像の個々の信号を位置合わせモジュール232に供給する。第2器官タイミングモニタ238は、第2パルスセンサ284から受けた信号にしたがって、患者262の器官のタイミング信号を決定し、第2器官タイミングモニタ238は、前記タイミング信号の個々の信号を位置合わせモジュール232に供給する。
【0071】
位置合わせモジュール232は、決定された患者262の身体の位置及び方向と、前記決定されたタイミング信号の現在時間点とにしたがって、画像データベース230から3次元画像(例えば、図2Cにおいて例示されるような3次元画像288)を取り出す。位置合わせモジュール232は、第1画像134(図1C)及び第2画像150に関して上述したのと同様の方法において、座標系Iにおいて取得された3次元画像288を、座標系IIにおいて取得された第2画像286をすでに含む座標系IIと位置合わせする。
【0072】
位置合わせモジュール232は、3次元画像288と、第2画像286と、医療用介在装置280の遠位端の視覚的表現と、医療用介在装置280のリアルタイム画像との異なった組み合わせを発生する。例えば、位置合わせモジュール232は、医療用介在装置280(この場合においてカテーテル)の遠位端のリアルタイムの視覚的表現290を、前記取り出された3次元画像に重ね、これによって3次元画像288を発生する。位置合わせモジュール232は、個々のビデオ信号をディスプレイ(図示せず)に供給する。前記ディスプレイは、3次元画像288を第2画像286と一緒に表示する。
【0073】
他の例において、位置合わせモジュール232は、3次元画像288を第2画像286に重ねる。第2画像286は、医療用介在装置280のリアルタイム画像292を含んでもよい。この場合において、臨床スタッフは、患者262の器官の疑似リアルタイム3次元画像(すなわち、3次元画像288)上の医療用介在装置280リアルタイム視覚的表現290を見ることができ、3次元画像288は、前記器官のタイミング信号にしたがって絶えず更新される。さらに、臨床スタッフは、一般に前記疑似リアルタイム3次元画像(すなわち、3次元画像288)より少ない情報を含む前記器官のリアルタイム画像(すなわち、第2画像286)上の医療用介在装置280のリアルタイム画像292を見ることができる。
【0074】
図2Dの参照と共に、位置合わせモジュール232は、第2イメージャ316と、第2MPS236と、第2器官タイミングモニタ238と、画像データベース230とに結合される。第2イメージャ316は、第2MPS236及び画像検出器314に結合される。装置位置及び方向検出器312及び器官タイミングセンサ260は、第2MPS236に結合される。第2パルスセンサ284は、第2器官タイミングモニタ238に結合される。
【0075】
カテーテルのような医療用介在装置310は、患者262の体内に挿入される。身体位置及び方向検出器312及び画像検出器314は、医療用介在装置310の遠位端において配置される。画像検出器314は、参照によってここに含まれる米国特許出願第09/949160号の画像検出器と同様である。したがって、画像検出器314は、光干渉断層計(OCT)イメージング素子、血管内超音波検査法(IVUS)変換器、磁気共鳴イメージング(MRI)素子、サーモグラフィイメージング素子、血管造影法素子等であってもよい。第2イメージャ316は、画像検出器314から受けた信号にしたがって、第2画像(例えば、図2Dにおいて例示されるような第2画像318)を発生する。
【0076】
第2MPS236は、器官タイミングセンサ260から受けた信号にしたがって、座標系IIにおける器官タイミングセンサ260の位置及び方向を決定する。第2MPS236は、装置位置及び方向検出器312から受けた信号にしたがって、医療用介在装置310の遠位端の位置及び方向を決定する。第2MPS236は、決定された器官タイミングセンサ260の位置及び方向の個々の信号を、位置合わせモジュール232及び第2イメージャ316に供給する。第2MPS236は、決定された医療用介在装置310の位置及び方向の個々の信号を、位置合わせモジュール232に供給する。
【0077】
画像検出器314は、周囲の物体(例えば、血管の内膜)の個々の信号を第2イメージャ316に供給し、第2イメージャ316は、受けた前記信号にしたがって、第2画像318のような第2画像を発生する。第2イメージャ316は、前記第2画像を、決定された器官タイミングセンサ260の位置及び方向に関係付ける。第2イメージャ316は、関係付けられた第2画像の個々の信号を、位置合わせモジュール232に供給する。第2器官タイミングモニタ238は、第2パルスセンサ284から受けた信号にしたがって、患者262の器官のタイミング信号を決定し、第2器官タイミングモニタ238は、前記タイミング信号の個々の信号を位置合わせモジュール232に供給する。
【0078】
位置合わせモジュール232は、決定された器官タイミングセンサ260の位置及び方向と、決定されたタイミング信号の現在時間点とにしたがって、画像データベース230から3次元画像(例えば、図2Dにおいて例示されるような3次元画像320)を取り出す。位置合わせモジュール232は、第1画像134(図1C)及び第2画像150に関係して上述したのと同様の方法において、座標系Iにおいて取得された3次元画像320を、座標系IIにおいて取得された第2画像318と位置合わせする。
【0079】
位置合わせモジュール232は、3次元画像320と、第2画像318と、医療用介在装置310の遠位端の視覚的表現と、医療用介在装置310のリアルタイム画像との異なった組み合わせを発生する。例えば、位置合わせモジュール232は、医療用介在装置310(この場合において、カテーテル)の遠位端のリアルタイム視覚的表現322を、取り出された前記3次元画像上に重ね、これによって、3次元画像320を発生する。位置合わせモジュール232は、個々のビデオ信号をディスプレイ(図示せず)に供給する。このディスプレイは、3次元画像320を第2画像318と一緒に表示する。
【0080】
他の例において、位置合わせモジュール232は、3次元画像320を第2画像318上に重ねる。第2画像318は、医療用介在装置310のリアルタイム視覚的表現324を含むことができる。
【0081】
ここで、図3A、3B、3C及び3Dを参照する。図3Aは、患者の身体において配置され、開示される技術の他の実施例にしたがって、画像のスケールファクタを決定する2個の身体位置及び方向検出器の図式的例示である。図3Bは、図1Aの第1イメージャと同様の第1イメージャによって取得される患者の身体の第1画像の図式的な例示である。図3Cは、図1Aの第2イメージャと同様の第2イメージャによって取得される患者の身体の第2画像の図式的な例示であり、前記第2画像のスケールは、図3Bの第1画像のスケールと異なる。図3Dは、図3Cの第2画像のスケールに従って修正された図3Bの第1画像の図式的な例示である。
【0082】
身体位置及び方向検出器350及び352は、患者(図示せず)の身体354に取り付けられる。身体位置及び方向検出器350及び352の各々は、身体位置及び方向検出器130(図1A)が患者132の身体に取り付けられる方法と同様の方法において、身体354に取り付けられる。身体位置及び方向検出器350及び352は、システム100(図1A)のようなシステムに結合される。したがって、身体位置及び方向検出器350及び352は、画像取得中、第1MPS102(図1B)と同様の第1MPSに結合されることができ、医療操作が患者において行われている間、第2MPS110(図1C)と同様の第2MPSに結合されることができる。
【0083】
第2イメージャ108と同様の第2イメージャが結合される位置合わせモジュール112(図1C)と同様の位置合わせモジュールは、各々前記第1イメージャ及び前記第2イメージャによって発生される前記第1画像及び前記第2画像のスケールファクターを知らない。身体位置及び方向検出器350と352との間の距離は、文字Lによって示される。
【0084】
図3Bの参照と共に、第1イメージャ104(図1B)と同様の第1イメージャは、身体354の器官(図示せず)の第1画像356をディスプレイ(図示せず)において発生する。身体位置及び方向検出器350及び352は、前記ディスプレイにおいて2個のマーク358及び360によって各々表され、マーク358と360との間の距離は、L1によって示される。
【0085】
図3Cの参照と共に、第2イメージャ108(図1C)と同様の第2イメージャは、前記ディスプレイにおいて前記器官の第2画像362を発生する。身体位置及び方向検出器350及び352は、前記ディスプレイにおいて2個のマーク364及び366によって各々表され、マーク364と366との間の距離は、L2によって示される。
【0086】
図3B及び3Cにおいて示す例において、第1画像356のスケールは、第2画像362のスケールの2倍である(すなわち、L1=2L2)。前記第1画像及び前記第2画像の正しい印象を観察者(図示せず)に与えるため、前記第1画像及び前記第2画像は、実質的に同じスケールにおいて表示されなければならない。
【0087】
図3Dの参照と共に、前記位置合わせモジュールは、第1画像356を200%スケールダウンし、これによって、他の第1画像368を発生する。身体位置及び方向検出器350及び352は、前記ディスプレイにおいて2個のマーク370及び372によって各々表され、マーク370と372との間の距離は、L1によって示される(すなわち、マーク358と360との間の距離と同じ)。したがって、第1画像368及び第2画像362は、実質的に同じスケールにおいて、並んで表示される。
【0088】
ここで、開示される技術の他の実施例にしたがって構成され動作する、第1MPS及び第2MPSが一般に390で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である図4を参照する。座標決定ユニット(CDU)390は、トランシーバ392と、プロセッサ394と、複数のセンシングユニット3961、3962及び396Nとを含む。
【0089】
システム100(図1A)と同様のシステムにおいて、第1MPS102は第1CDUに交換されることができ、第2MPS110は第2CDUに交換されることができる。前記第1CDUは、第1トランシーバ及び第1プロセッサを含み、前記第2CDUは、第2トランシーバ及び第2プロセッサを含む。前記第1CDUは、座標系I(図1B)と同様の第1座標系に関係付けられ、前記第2CDUは、座標系II(図1C)ど同様の第2座標系に関係付けられる。
【0090】
前記第1プロセッサは、前記第1トランシーバと、第1イメージャ104(図1A)と同様の第1イメージャとに結合され、前記第2プロセッサは、第2イメージャ108と同様の第2イメージャと、位置合わせモジュール112と同様の位置合わせモジュールとに
結合される。図1Bにおいて例示したのと同様の画像取得段階において、センシングユニット3961、3962及び396Nは、前記第1トランシーバに結合される。図1Cにおいて例示したのと同様の画像位置合わせ段階において、センシングユニット3961、3962及び396Nは、前記第2トランシーバに結合される。
【0091】
センシングユニット3961、3962及び396Nの各々は、身体位置及び方向検出器130(図1B)が患者132の身体に取り付けられる方法と同様に、患者(図示せず)の体398に取り付けられる。センシングユニット3961、3962及び396Nの各々は、位置検出器及び方向検出器を含む。前記位置検出器は、電磁コイル、ソナーセンサ(例えば、超音波)等であってもよい。
【0092】
前記方向検出器は、ミニチュアのジャイロスコープ等であってもよい。この形式のジャイロスコープは、発振チップ搭載素子及び複数のセンサを含み、ドイツのBEI Systron Donner Inertial DivisionによってGyroChip(登録商標)の下で販売される。前記発振素子は水晶素子によって発振され、前記センサは、該センサの軸の周りの前記発振素子の回転に比例する電流を発生する。トランシーバ392は、プロセッサ394と、センシングユニット3961、3962及び396Nとに結合される。
【0093】
トランシーバ392は、信号(例えば、電磁又は音響)を、センシングユニット3961、3962及び396Nの各々の前記位置検出器に向けて送信する。センシングユニット3961、3962及び396Nの各々の前記位置検出器は、これらの位置の個々の信号を、個々の配線を経てトランシーバ392に送信する。センシングユニット3961、3962及び396Nの各々の前記方向検出器は、これらの方向の個々の信号を、他の個々の配線を経てトランシーバ392に送信する。プロセッサ394は、トランシーバ392によって受信された信号にしたがって、身体398の位置及び方向を決定する。
【0094】
加えて、医療用介在装置400は、身体398の中に挿入されることができ、センシングユニット402は、医療用介在装置400の遠位端に取り付けられることができ、センシングユニット402は、トランシーバ392に結合されることができる。センシングユニット402は、センシングユニット3961、3962及び396Nの各々と同様である。この場合において、プロセッサ394は、センシングユニット402から受信された信号にしたがって、医療用介在装置400の遠位端の位置及び方法を決定することができる。
【0095】
さらに加えて、超音波変換器、OCT素子、MRI素子、サーモグラフィ素子、血管造影法等のようなイメージャ404は、身体398の画像を取得するのに用いられることができる。この場合において、センシングユニット406は、イメージャ404に取り付けられ、センシングユニット406は、トランシーバ392に結合される。センシングユニット406は、センシングユニット3961、3962及び396Nの各々と同様である。プロセッサ394は、トランシーバ392によってセンシングユニット406及びセンシングユニット3961、3962及び396Nから受けた信号にしたがって、イメージャ404の位置及び方向を決定する。
【0096】
ここで、開示される技術の他の実施例にしたがって構成され動作する、前記第1MPS及び前記第2MPSの各々が、一般に430で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である図5を参照する。座標決定ユニット430は、複数の受信機4321、4322及び432Nと、プロセッサ434と、複数の送信機4361、4362及び436Nとを含む。送信機4361、4362及び436Nは、身体位置及び方向検出器130(図1B)が患者132の身体に取り付けられるのと同様の方法において、患者(図示せず)の身体438に取り付けられる。受信機4321、4322及び432Nは、プロセッサ434に結合される。
【0097】
送信機4361、4362及び436Nの各々は、信号を受信機4321、4322及び432Nに送信する。この信号は、電磁気(例えば、無線周波数、ラジオパルス)、光(例えば、赤外線)、音響(超音波)等であってもよい。プロセッサ434は、受信機4321、4322及び432Nから受信された信号にしたがって、三角法を用いて、身体438の位置及び方向を決定する。
【0098】
ここで、開示される技術の他の実施例にしたがって動作する、図1Aのシステムを動作する方法の図式的な例示である図6を参照する。手順460において、患者の身体の第1位置及び方向は、第1座標系において、第1医療位置決めシステムによって検出される。図1Bの参照と共に、第1MPS102は、身体位置及び方向検出器130から受けた信号にしたがって、座標系Iにおける患者132の身体の位置及び方向を決定する。第1MPS102及び身体位置及び方向検出器130は、座標決定ユニット390(図4)又は座標決定ユニット430(図5)のいずれかと交換されることができることに注意されたい。
【0099】
手順462において、患者の身体の第1画像は、第1イメージャによって取得される。図1Bの参照と共に、第1イメージャ104は、患者132の身体の第1画像134を取得する。
【0100】
手順464において、前記第1画像の座標の第1の集合は、前記第1座標系において決定される。図1Bの参照と共に、第1イメージャ140は、座標系Iにおける第1画像134の座標の集合を決定し、画像データベース106に、この座標の集合を、手順460において検出された身体位置及び方向検出器130の座標と共に記憶する。
【0101】
手順466において、患者の身体の第2位置及び方向は、第2座標系において、第2医療位置決めシステムによって検出される。図1Cの参照と共に、第2MPS110は、身体位置及び方向検出器130から受けた信号にしたがって、座標系IIにおける身体位置及び方向検出器130の位置及び方向を決定する。第2MPS110及び身体位置及び方向検出器130は、座標決定ユニット390(図4)又は座標決定ユニット430(図5)のいずれかによって置き換えられることができることに注意されたい。
【0102】
手順468において、患者の身体の第2画像は、第2イメージャによって取得される。図1Cの参照と共に、第2イメージャ108は、患者132の身体の第2画像150を取得する。
【0103】
手順470において、前記第2画像の座標の第2の集合は、第2座標系において決定される。図1Cの参照と共に、第2イメージャ108は、座標系IIにおける第2画像150の座標の集合を決定し、座標のこの集合を、手順466において検出される身体位置及び方向検出器130の座標と関係付ける。
【0104】
手順472において、前記座標の第1の集合は、前記第2座標系において位置合わせされ、結果として、前記座標の第2の集合と位置合わせされる。図1Cの参照と共に、位置合わせモジュール112は、座標系Iにおける第1画像134の座標の集合の個々のデータを、画像データベース106から取り出す。位置合わせモジュール112は、座標系IIにおける第2画像150の座標の集合の個々の信号と、座標系IIにおける身体位置及び方向検出器130の座標の個々の信号とを、第2イメージャ108から受ける。位置合わせモジュール112は、座標系IIにおける第1画像を、結果として第2画像150と、座標系Iにおける身体位置及び方向検出器130の座標を座標系IIにおける身体位置及び方向検出器130と位置合わせすることによって、位置合わせする。
【0105】
位置合わせモジュール112は、医療用介在装置152の遠位端の位置及び方向の個々の信号も第2MPS110から受ける。位置合わせモジュール112は、医療用介在装置152の遠位端のリアルタイム視覚的表現158を第1画像134に重ねる。第1画像134及び第2画像150は、ディスプレイにおいて並べて表示されるか、互いに重ねられて表示される。
【0106】
開示される技術の他の態様によれば、患者の身体の選択された組織の選択された位置及び方向は、医療位置決めシステムによって、治療装置に対して再帰的に得られる。選択された組織に関して前記治療装置によって有効に医療的に治療されるのに適切なものである選択された位置及び方向は、第1治療中一度検出される。すべてのその後の治療の開始時において、患者の身体の位置は、前記検出器の現在検出されている位置及び方向が、前記選択された位置及び方向と一致するように再位置決めされる。
【0107】
言葉「選択された組織」は、以下で、(例えば、照射又は外科によって)手術されるべき、患者の身体の内部(すなわち、身体の内臓)又は外部(例えば、皮膚、つめ又は角膜)の組織のことをさす。前記選択される組織は、(照射の場合において)増殖(すなわち、過度の細胞数を有する組織)、新形成(新たな組織の形成)、良性腫瘍、悪性腫瘍、癌腫等のような身体の器官の腫瘍的部分、又は、(外科の場合において)脳、肝臓、肺、腎臓等のような身体の器官の非腫瘍的部分であってもよい。
【0108】
ここで、一般的に500で示され、開示される技術の他の実施例に従って構成され動作する、複数の異なった治療セッション中に患者の選択された組織を医療的に治療するシステムの図式的な例示である図7を参照する。システム540は、MPS502と、位置決めユーザインタフェース504と、記憶ユニット506と、治療装置508と、移動メカニズム510とを含む。
【0109】
MPS502は、上述した第1MPS102(図1A)と同様である。位置決めユーザインタフェース504は、触覚、聴覚、視覚、運動感覚ユーザインタフェース等である。記憶ユニット506は、ハードディスク、フロッピー(登録商標)ディスケット、コンパクトディスク、磁気テープ、フラッシュメモリ、ランダムアクセスメモリ、読み出し専用メモリ等のような、磁気メモリユニット、光学メモリユニット、集積回路等である。
【0110】
治療装置508は、線形加速器、局所ロボット外科装置、リモートテレビ外科装置等のような組織治療装置である。線形加速器は、高エネルギーX線及び電子ビームを発生し、空間における予め決められた体積又は点において位置する選択された組織を異なった方向から攻撃する装置である。局所ロボット外科装置は、同じ病院の制御室からのように、患者から実質的に近い距離から臨床スタッフによって操作される装置である。リモートテレビ外科装置は、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)、メトロポリタンエリアネットワーク(MAN)等のようなネットワークを介して、遠隔地から臨床スタッフによって操作される装置である。移動メカニズム510は、治療装置508を異なった方向に移動し、治療装置508が前記選択された組織を異なった方向から攻撃するのを可能にするために、治療装置508に結合される。一般において、移動メカニズムは、前記治療装置又は患者、又は双方を、互いに関して移動することに適合する。
【0111】
治療装置508は、例えば、1本の軸についての回転に対して自由である、すなわち、1自由度を有するCアームの形態であってもよい。代わりに、治療装置508は、2つ以上の自由度を有することもできる。図7に示す例において、治療措置508は線形加速器である。移動メカニズム510は、電気機械要素(例えば、ギア、プーリー及びベルトのようなパワー伝達要素を含む回転又は線形電気モータ)、電磁気要素(例えば、電磁コイル及びムービングコア、又は、ムービングコア及び電磁コア)、水力式要素、空気式要素等である。
【0112】
検出器512は、患者514の身体において、体内に位置する選択された組織516に関係付けられた選択された位置において挿入され、患者514が医療治療下にある間、この位置において固定される。検出器512は、上述した身体位置及び方向検出器(図1B)と同様である。検出器512は、前記身体において、侵襲的(例えば、切開を行うことによって)又は非侵襲的(例えば、針(図示せず)又はカテーテル(図示せず)の助けを借りて)に挿入される。カテーテルが用いられる場合において、検出器512は、前記カテーテルの遠位端に結合され、検出器512は、前記身体に、前記カテーテルの助けを借りて挿入される。検出器512は、治療期間全体の間、体内に置いておかれる。図7に示す例において、検出器512は、選択された組織516内に挿入される。
【0113】
検出器512は、配線520及びクイック分離プラグ(図示せず)によってMPS502に結合される。検出器512は、すべての治療セッションの開始前にMPS502にプラグで接続され、セッション後に分離される。MPS502は、位置決めユーザインタフェース504に結合される。代わりに、前記検出器はMPSに無線式に結合される。
【0114】
第1治療セッション中、臨床スタッフ(図示せず)は、患者514の身体の位置を、治療装置508が選択された組織516を効果的に治療するのに適した位置及び方向において選択された組織516が位置するような位置及び方向(すなわち、治療位置及び方向)に位置決めする。この点において、MPS502は、検出器512の位置及び方向(すなわち、初期位置及び方向)を検出し、臨床スタッフは、この初期位置及び方向を、位置決めインタフェース504を介して記憶ユニット506に記憶する。
【0115】
すべてのその後の治療セッション前に、臨床スタッフは、検出器512をMPS502に結合する。患者514は、手術台の上に横たわり、臨床スタッフは、患者514の身体の一部を、前記治療位置及び方向に位置決めし、検出器512の位置及び方向が前記記憶された位置及び方向と実質的に同じになるようにする。このとき、患者514のからだのこの部分は、前記第1治療セッションにおけるのと同じ位置及び方向にある。
【0116】
システム500は、臨床スタッフが、各々のその後の治療セッションにおいて患者514の身体を、前記第1セッションにおけるのと同じ位置及び方向に繰り返し再位置決めすることを可能にすることに注意されたい。手術台518は、治療セッション中、選択された組織をその場に固定するのに適合した他の制限装置に交換されることができることにさらに注意されたい。
【0117】
臨床スタッフは、身体の治療位置及び方向を、例えば、その後の治療セッションにおいて検出される検出器512の位置及び方向(すなわち、中間位置及び方向)を、前記第1治療セッション中に検出される位置及び方向(すなわち、初期位置及び方向)と比較することによって決定することができる。この目的のため、位置決めユーザインタフェース504は、これら2つの位置及び方向の、例えば、視覚的、聴覚的、運動感覚的等の表現を発生する。患者514の身体の一部の前記治療位置及び方向における位置決めし、この治療位置及び方向を保持した後、臨床スタッフは、治療装置508に命令し、選択された組織516を自動的に治療する(例えば、線形加速器を使用する場合、前記選択された組織に異なった方向から照射する)。
【0118】
コントローラ(図示せず)は、治療装置508及び移動メカニズム510に結合されることができる。本システムは、前記コントローラに結合される他の治療装置ユーザインタフェース(図示せず)をさらに含むことができる。前記コントローラは、プログラムされ、移動メカニズム510を制御し、治療装置508を、選択された組織516をこれらの方向から医療的に治療するために移動することができる。このプログラムは、固定されていて不変であり、前記コントローラに常時格納される。代わりに、臨床スタッフは、前記プログラムを、個々のパラメータを前記コントローラに前記治療装置ユーザインタフェースを介して入力することによって変更することができる。
【0119】
前記コントローラは、MPS502にさらに結合される。MPS502は、検出器512の位置及び方向を検出し、個々の信号を前記コントローラに供給する。前記コントローラは、移動メカニズム510に命令し、医療装置508をMPS502から受けた信号にしたがって閉ループにおいて(すなわち、MPS502からのフィードバックにしたがって)移動する。この方法において、前記コントローラは、移動メカニズム510に命令し、治療装置508の位置及び方向を、選択された組織516の位置及び方向における変化(すなわち、患者514の身体の運動)にしたがって変更する。
【0120】
このように、システム500は、患者514は拘束されず動くのが自由でありながら、臨床スタッフが患者514を治療することを可能にする。拘束されない位置における治療の質は、患者514の身体が拘束され、治療装置508が閉ループにおいて患者514の運動に追従しない場合と実質的に同じである。
【0121】
さらに代わりに、臨床スタッフは、選択された組織の境界の個々の座標の集合を前記医療装置ユーザインタフェースを介して前記コントローラに入力する。前記コントローラは、前記移動メカニズムを制御し、前記治療装置を、前記入力される座標の集合にしたがって、前記選択された組織を自動的に医療治療するため移動する。前記入力される座標の集合は、離散的(すなわち、数値)又は容量的(例えば、基準点からの球の半径、立方体の高さと幅と深さ、又は、円柱の底の半径及びその高さ)のいずれかであってもよい。
【0122】
さらに代わりに、前記移動メカニズムは、前記手術台に結合され、前記コントローラは、前記移動メカニズム及び前記治療装置ユーザインタフェースに結合される。臨床スタッフは、選択された組織の境界の個々の座標の集合を、前記治療装置ユーザインタフェースを介して前記コントローラに入力する。前記コントローラは、前記移動メカニズムを制御し、前記手術台を、前記入力された座標の集合に従って、前記治療装置が前記選択された組織を医療治療することを可能にするために移動する。
【0123】
さらに代わりに、前記移動メカニズムは、前記治療装置及び前記手術台に結合される。どのような場合でも、前記移動メカニズムは、前記治療装置が前記選択された組織を医療治療することを可能にするために、前記治療装置に対する前記選択された組織の運動を与える。
【0124】
代わりに、比較器(図示せず)は、MPS502と、記憶ユニット506と、位置決めユーザインタフェース504とに結合され、前記比較器は、その後の治療セッションにおける前記検出器の位置及び方向を、前記第1治療セッション中に検出される前記検出器の位置及び方向と比較する。前記比較器は、前記比較器が記憶された位置及び方向が現在検出される位置及び方向と実質的に同じであることを決定する場合、信号を供給する。
【0125】
位置決めユーザインタフェース504は、前記比較器から受けた前記信号にしたがって、可聴音、視覚的合図、触覚的指示のような指示を発生する。臨床スタッフは、この指示にしたがって、患者514の身体の一部が、選択された組織516が前記治療装置によって医療治療されるのに好適な位置及び方向において配置されたことを決定する。さらに代わりに、前記検出器は、臨床スタッフが、前記検出器が前記選択された位置及び方向において配置される場合、前記選択された組織の位置及び方向が医療治療に好適であることを保証することができるほど前記選択された装置に近い選択された位置において挿入されることができる。
【0126】
ここで、開示される技術の他の実施例にしたがって動作する、図7のシステムを動作する方法の図式的な例示である図8を参照する。手順522において、固定された検出器の初期位置及び方向は検出され、前記初期位置及び方向は、患者の身体の選択された組織を自動的に治療するのに好適な治療位置及び方向に関係付けられる。図7の参照と共に、検出器512が、選択された組織516を自動的に処理するのに治療装置508に好適な位置及び方向(すなわち、治療位置及び方向)にある場合、MPS502は、検出器512の位置及び方向を検出する。
【0127】
検出器512は、臨床スタッフによって、選択された組織516内に前もって挿入される。代わりに、前記位置及び方向検出器は、前記選択された組織に実質的に近い位置において挿入され(すなわち、前記位置及び方向検出器と前記選択された組織との間の空間的関係が常に変化しないままであるべきである)、臨床スタッフが、この位置及び方向が前記治療装置によって有効に治療される前記選択された組織に関する位置及び方向を決定することを保証できるようにする。
【0128】
手順524において、前記初期位置及び方向は記録される。図7の参照と共に、MPS502は、記憶ユニット506に、手順522において検出されるような検出器512の位置及び方向を記憶する。代わりに、臨床スタッフは、前記治療位置及び方向に一致する検出器512の位置及び方向の個々の座標の集合を、位置決めユーザインタフェース504を介して記憶する。この座標の集合は、例えば前記選択された組織の画像にしたがって、治療計画段階において決定されることができる。
【0129】
手順526において、各々の周期的な医療治療の開始時において、前記固定された検出器の現在位置及び方向が検出される。図7の参照と共に、各々のその後の治療セッション中、医療治療前に、臨床スタッフが、選択された組織516を含む患者514の身体の部分を移動する間、MPS502は、検出器512の位置及び方向を検出する。手順526に続いて、本方法は、手順528又は手順532のいずれかに進むことができる。
【0130】
手順528において、現在位置及び方向が、記録された初期位置及び方向と実質的に同じであるか否かが示される。図7の参照とともに、臨床スタッフが、選択された組織516を含む患者514の身体の部分を移動しながら、位置決めユーザインタフェース504は、検出器512の現在位置及び方向が、手順524において記録された位置及び方向と実質的に同じであるか否かを示す。位置決めユーザインタフェース504は、検出器512の現在位置及び方向と、記録された位置及び方向との個々の指示を(例えば、視覚的に)発生し、臨床スタッフは、患者514を適宜移動する。代わりに、位置決めユーザインタフェース504は、臨床スタッフに、検出器512の現在位置及び方向が、手順524において記録されるような初期位置及び方向と実質的に一致することを、(例えば、聴覚的に)通知する。
【0131】
手順530において、前記検出器を前記記録された初期位置及び方向において保持しながら、前記選択された組織は医療的に治療される。図7の参照と共に、臨床スタッフが、検出器512を、したがって選択された組織516を、手順524において記録された位置及び方向において保持しながら、治療装置508は、選択された組織516を(例えば、選択された組織516に異なった方向から照射して)医療的に治療する。
【0132】
手順532において、現在位置及び方向が記録された初期位置及び方向と実質的に同じ場合、治療装置は、選択された組織を自動的に治療するのに好適な方向に向けられる。この場合において、システム500(図7)と同様のシステムにおいて、前記MPSは前記治療装置に結合される。前記検出器の、したがって前記選択された組織の位置及び方向が、前記記録された初期位置及び方向と実質的に同じ場合は常に、前記MPSは、前記治療装置を、前記選択された組織を自動的に治療するように向ける。
【0133】
開示される技術の他の態様によれば、座標系の1つは、自動化された医療治療装置の座標系である。以下の例において、自動化医療治療システムは、選択された点に、これに交差する複数の軸を照射することによって照射するのに使用される線形加速器である。ここで、位置及び方向検出器は、患者の体内に、選択された組織に関係する選択された位置において置かれる。臨床スタッフは、計画段階において前記身体の一部の位置及び方向を決定し、前記検出器の位置及び方向を記録する。照射治療段階において、位置合わせモジュールは、前記照射治療段階における前記検出器の位置及び方向を、前記計画段階中に決定された前記検出器の位置及び方向と位置合わせする。臨床スタッフは、次に、前記身体の一部を、前記検出器の位置及び方向が前記計画段階において決定された前記検出器の位置及び方向と実質的に同じになるように再位置決めし、前記治療装置を前記選択された組織に照射するように向ける。
【0134】
ここで、図9A、9B及び9Cを参照する。図9Aは、開示される技術の他の実施例に従って構成され動作する、イメージャの座標系において規定された選択された組織の境界を、一般に540で示される治療装置の座標系と位置合わせするシステムの図式的な例示である。図9Bは、図9Aのシステムの照射計画部分の図式的な例示である。図9Cは、図9Aのシステムの照射治療部分の図式的な例示である。
【0135】
図9Aの参照と共に、システム540は、イメージャMPS542と、ユーザインタフェース544と、イメージャ546と、記憶ユニット548と、照射器MPS550と、位置合わせモジュール552と、照射ユニット554とを含む。照射ユニット554は、コントローラ556と、照射器558と、移動メカニズム560とを含む。イメージャ546は、イメージャMPS542と、ユーザインタフェース544と、記憶ユニット548とに結合される。記憶ユニット548は、イメージャMPS542に結合される。位置合わせモジュール552は、記憶ユニット548と、照射器MPS550と、照射ユニット554とに結合される。コントローラ556は、照射器558と、移動メカニズム560とに結合される。
【0136】
イメージャMPS542と、イメージャ546と、照射器MPS550と、位置合わせモジュール552は、上述した第1MPS102(図1A)と、第1イメージャ102と、第2MPS110と、位置合わせモジュール112と各々同様である。イメージャ546は、コンピュータトモグラフィ、超音波等の3次元型イメージャであってもよい。記憶ユニット548及び移動メカニズム560は、上述した記憶ユニット506(図7)及び移動メカニズム510と各々同様である。ユーザインタフェース544は、キーボード、マウス、スタイラス、マイクロホン、ディスプレイ(例えば、タッチスクリーンディスプレイ)等、又はこれらの組み合わせのような、触覚、聴覚、視覚等のユーザインタフェースである。照射器558は、治療装置508(図7)に関連して上述した線形加速器と同様である。
【0137】
図9Bの参照と共に、イメージャ546は、イメージャMPS542及び記憶ユニット548に結合される。イメージャMPS542は、検出器512(図7)が患者514の体内に置かれる方法と同様に、患者566の選択された組織564に関係付けられた選択された位置におかれる。代わりに、位置及び方向検出器562は、カテーテル、針等のような身体侵入装置(図示せず)を用いることによって、患者566の体内に、前記選択された位置に挿入されることができる。位置及び方向検出器562は、上述した身体位置及び方向検出器130(図1B)と同様である。患者566は、手術台568上に横たわる。
【0138】
イメージャMPS542は、X1、X2、X3座標系(すなわち、座標系I)に関係付けられる。イメージャ546は、イメージャ546の位置及び方向が座標系Iに関して規定されるように、イメージャMPS542によってキャリブレートされる。位置及び方向検出器562は、その位置及び方向の個々の信号を、配線570を経て(代わりに、無線式に)イメージャMPS542に供給する。イメージャMPS542は、位置及び方向検出器562から受けた前記信号にしたがって、座標系Iにおける位置及び方向検出器562の位置及び方向を決定する。
【0139】
イメージャMPS542は、位置及び方向検出器562の位置及び方向の個々の信号をイメージャ546に供給する。イメージャ546は、選択された組織564の組織画像574の計画段階画像572と、位置及び方向検出器562の検出器画像576の個々の信号を発生する。計画段階画像572は、2次元又は3次元のいずれかであってもよい。イメージャ546は、この信号をユーザインタフェース544に供給し、ユーザインタフェース544は、受けた信号にしたがって、計画段階画像572を表示する。検出器画像576は、位置及び方向検出器562のリアルタイム画像、又は、その表現のいずれかであってもよい。ユーザインタフェース544が検出器画像576を表示する必要はなく、検出器画像576は、開示される技術をより明確に説明するのに役に立つことに注意されたい。
【0140】
臨床スタッフは、イメージャ546によって発生された画像の選択されたスライスにおいて、マーキング578によって組織画像574の境界をマークする。イメージャ546は、次に、前記スライスにおけるマーキング526の座標にしたがって、選択された組織564の3次元画像の座標の集合を決定する。イメージャ546は、この座標の集合を、位置及び方向検出器562の座標と共に、記憶ユニット548に記憶する。
【0141】
代わりに、臨床スタッフは、位置及び方向検出器562の位置及び方向に関する選択された組織564の体積の個々の座標の集合を、ユーザインタフェース544を介して記憶ユニット548に入力する。入力される座標の集合は、離散的(すなわち、数値)又は容量的(例えば、基準点からの球の半径、立方体の高さと幅と深さ、又は、円柱の底の半径及びその高さ)のいずれかであってもよい。
【0142】
一般に、図9Bに例示されるようなシステム540の計画段階は、図9Cにおいて例示されるようなシステム540の照射段階とは物理的に異なった場所において行われる。したがって、配線570には、位置及び方向検出器562をイメージャMPS542から分離し、位置及び方向検出器562を照射器MPS550に接続するために、コネクタ(図示せず)が設けられる。しかしながら、位置及び方向検出器は、無線接続部を設けられることもできる。
【0143】
図9Cの参照と共に、位置合わせモジュール552は、記憶ユニット548と、照射器MPS550と、照射ユニット554とに結合される。位置及び方向検出器562は、配線570を介して照射器MPS550に結合される。
【0144】
照射器MPS550は、X2、Y2、Z2座標系(すなわち、座標系II)に関係付けられる。照射ユニット554は、照射ユニット554の位置及び方向が座標系IIに関して規定されるように、照射器MPS550によってキャリブレートされる。位置及び方向検出器562は、その位置及び方向の個々の信号を照射器MPS550に供給する。照射器MPS550は、位置及び方向検出器562から受けた信号にしたがって、座標系IIにおける位置及び方向検出器562の位置及び方向を決定する。照射器MPS550は、決定された位置及び方向の個々の信号を位置合わせモジュール552に供給する。
【0145】
システム540は、手動モード又は自動モードのいずれかにおいて操作されることができる。手動モードにおいて、移動メカニズム560は、照射ユニット558を移動し、空間において固定された点に異なった方向から自動的に照射することができる。しかしながら、移動メカニズム560は、前記固定された点以外の空間における点を照射するように照射ユニット558を移動することはできない。
【0146】
手動モードにおいて、位置合わせモジュール552は、照射ユニット554から照射ユニット554の座標系(すなわち、座標系II)の個々のデータを受ける。位置合わせモジュール552は、次に、座標系Iにおける位置及び方向検出器562の位置及び方向を、座標系IIにおける位置及び方向検出器562の位置及び方向と位置合わせする。臨床スタッフは、座標系IIにおける位置及び方向検出器562の位置及び方向が、前記手術台において決定された(すなわち、座標系Iにおける)位置及び方向と実質的に同じになるように、患者566の身体の部分を位置決めする。ここで、選択された組織564は、空間において固定された点において位置し、この点に向かって、照射器558は、異なった方向からの放射を向けるように設定される。この段階において、臨床スタッフは、移動メカニズムに指示し、照射器558を移動し、選択された組織564に異なった方向から自動的に照射する。
【0147】
システム540の動作の自動モードにおいて、移動メカニズム560は、照射器558の位置及び方向を調節し、患者566の身体の実質的にどのような選択された点も照射することができる。加えて、移動メカニズム560は、照射ユニット558を移動し、患者566の身体の選択された点に異なった方向から照射することができる。
【0148】
自動モードにおいて、位置合わせモジュール552は、記憶ユニット548から、座標系Iにおける選択された組織564の教科の座標の集合と、座標系Iにおける位置及び方向検出器562の座標の個々のデータを取り出す。位置合わせモジュール552は、座標系Iにおける位置及び方向検出器562の位置及び方向を、座標系IIにおける位置及び方向検出器562の位置及び方向と位置合わせする。
【0149】
位置合わせモジュール552は、座標系IIにおける選択された組織564の境界の座標の集合と、座標系IIにおけるその位置及び方向の個々の信号をコントローラ556に供給する。コントローラ556は、選択された組織564の境界を照射する照射器558に関する位置及び方向を、位置合わせモジュール552から受けた座標系IIにおける選択された組織564の座標の集合の個々のデータにしたがって決定し、個々の信号を移動メカニズム560に供給する。
【0150】
コントローラ566は、選択された組織564に異なった方向から照射する照射器558に関する複数の方向も決定し、これらの決定された方向の個々の信号を移動メカニズム560に供給する。移動メカニズム560は、照射器558も自動的に移動し、選択された組織564に異なった方向から照射する。
【0151】
システム540の動作の自動モードにおいて、臨床スタッフが患者556の身体の部分を照射器558に関して手動で位置決めする必要はないことに注意されたい。代わりに、移動メカニズム560は、照射器558を適切な位置及び方向に移動する。
【0152】
コントローラ556は、図7に関連して上述したように、移動メカニズム560に命令して、照射器558が選択された組織564に異なった方向から照射することを可能にするようにプログラムされることができる。座標系Iと座標系IIのスケールが異なる場合、位置合わせモジュール552は、図1Cに関連して上述したように、座標系IIにおいて位置及び方向検出器562の位置及び方向を位置合わせする間、これら2つの座標系の間のスケールファクタを適用する。
【0153】
代わりに、前記移動メカニズムは、前記手術台に結合される。この場合において、前記コントローラは、前記手術台の位置及び方向を決定し、患者556の身体を、照射器558が放射を選択された組織564の方に向けることができるように移動する。前記コントローラは、前記決定された方向の個々の信号を前記移動メカニズムに供給し、前記移動メカニズムは、前記コントローラから受けた信号にしたがって前記手術台を移動する。この場合においても、臨床スタッフが患者556の身体の部分を照射に適切な位置及び方向に手動で位置決めする必要はなく、代わりに、前記移動メカニズムがこの運動を行う。
【0154】
代わりに、前記移動メカニズムは、前記照射器及び手術台の双方に結合される。どのような場合においても、前記移動メカニズムは、前記選択された組織と照射器との間の相対運動を与える。
【0155】
ここで、開示される技術の他の実施例にしたがって動作する、図9Aのシステムを動作する方法の図式的例示である図10を参照する。手順580において、検出器は、患者の体内において、選択された組織に関係付けられた選択された位置において固定される。図9Bの参照と共に、位置及び方向検出器562は、患者522の体内において、選択された場所において挿入され、位置及び方向検出器562は、配線570を介してイメージャMPS542に結合される。
【0156】
手順582において、第1座標系における検出器の第1位置及び方向は、第1医療位置決めシステムによって検出される。図9Bの参照と共に、イメージャMPS542は、座標系Iにおける位置及び方向検出器562の位置及び方向を検出し、個々の信号をイメージャ546に供給する。
【0157】
手順584において、前記第1座標系における選択された組織の座標の集合は、前記第1位置及び方向に関係付けられる。図9Bの参照と共に、ユーザインタフェース544は、組織画像574及び検出器画像576を含む計画段階画像572を表示する。臨床スタッフは、組織画像574の境界を、ユーザインタフェース544を用いることによって、マーキング578によってマークする。イメージャ546は、マーキング578の座標の集合を、位置及び方向検出器562の座標と共に、記憶ユニット548に記憶するために供給する。
【0158】
代わりに、臨床スタッフは、位置及び方向検出器562の位置及び方向に関する選択された組織564の座標の集合を、前記ユーザインタフェースを介して入力し、この座標の集合を、位置及び方向検出器562の座標と共に、記憶ユニット548に記憶する。
【0159】
手順586において、第2座標系における前記検出器の第2位置及び方向は、第2医療位置決めシステムによって検出される。図9Cの参照と共に、患者522は、図9Bにおいて例示されるイメージング室とは通常異なる照射室内に置かれ、配線570は、照射器MPS550に結合される。照射器MPS550は、座標系IIにおける位置及び方向検出器562の位置及び方向を検出し、個々の信号を位置合わせモジュール552に供給する。
【0160】
手順588において、前記関係付けられた座標の集合は、前記第2位置及び方向にしたがって、前記第2座標系に位置合わせされる。図9Cの参照と共に、位置合わせモジュール552は、前記座標の集合を記憶ユニット548から取り出し、これらを、座標系IIにおける位置及び方向検出器562の位置及び方向にしたがって座標系IIに位置合わせする。位置合わせモジュール552は、さらに、データを座標系Iから座標系IIに変換する任意の変換情報(例えば、スケーリング)にしたがって、座標系Iにおける座標の集合を座標系IIに位置合わせする。
【0161】
位置合わせモジュール552は、前記位置合わせされた座標の集合の個々の信号を照射ユニット554に供給する(手順590)。手順592において、前記選択された組織は、前記位置合わせされた座標の集合にしたがって、異なった方向から照射される。図9A及び9Cの参照と共に、コントローラ556は、選択された組織564の体積に異なった方向から照射する照射器558に関する複数の方向を決定し、個々の信号を移動メカニズム560に供給する。移動メカニズム560は、コントローラ556から受けた信号にしたがって照射器558を移動する。
【0162】
代わりに、前記移動メカニズムは、前記手術台に結合され、前記照射器に関する前記患者の身体の一部の移動を可能にする。さらに代わりに、前記移動メカニズムは、前記手術台及び照射器の双方に結合される。すべての場合において、前記移動メカニズムは、前記選択された組織の前記照射器に関する移動を与える。
【0163】
開示される技術の他の態様によれば、医療位置決めシステムは、患者の体内に挿入される医療用介在装置に結合される検出器の位置及び方向を決定する。前記医療位置決めシステムは、イメージャに指示し、前記イメージャが前記医療用介在装置の興味ある部分の最大の可能な長さの画像を取得できるような方向に移動させる。この興味ある部分は、ディスプレイにおいて表示される。
【0164】
ここで、開示される技術の他の実施例にしたがって構成され動作する、一般に600で示される、医療用介在装置の画像を取得するシステムの図式的な例示である図11を参照する。システム600は、画像調節システム602と、MPS620と、医療用介在装置604と、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608と、イメージャ610とを含む。イメージャ610は、支持構造612と、移動メカニズム614と、放射発生器616と、放射検出器618とを含む。画像調節システム602は、MPS620と、プロセッサ622とを含む。
【0165】
医療用介在装置604は、患者624の体内に挿入される。患者624は、手術台626上に横たわる。装置位置及び方向検出器606は、医療用介在装置604の興味ある領域において、例えば、医療用介在装置604の遠位端628において、医療用介在装置604に結合される。イメージャ位置及び方向検出器608は、イメージャ610に取り付けられる。MPS620は、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608と、プロセッサ622とに結合される。プロセッサ622は、移動メカニズム614に結合される。イメージャ610は、患者624の画像(図示せず)を取得する装置である(例えば、蛍光透視法、超音波、核磁気共鳴−NMR、光学イメージング、サーモグラフィ、核イメージング−PET)。
【0166】
イメージャ610は、少なくとも3自由度を有する。MPS620は、X、Y、Z座標系(すなわち、座標系I)に関係付けられる。イメージャ610は、イメージャ610の位置及び方向が座標系Iに関して規定されるように、MPS620によってキャリブレートされる。
【0167】
図11に示す例において、イメージャ610は、X線型イメージャ(当該技術分野においてCアームイメージャとして知られる)である。したがって、放射発生器616及び放射検出器618は、放射発生器616が患者624の一方の側に置かれ、放射検出器618が患者624の反対側に置かれるように、支持構造612に結合される。放射発生器616及び放射検出器618は、放射軸(図示せず)上に置かれ、前記放射軸は患者624の身体と交差する。
【0168】
移動メカニズム614は、支持構造612に結合され、これによって、支持構造612がY軸について回転することを可能にする。移動メカニズム614は、支持構造612を回転し、これによって、前記放射軸の方向を、X−Z面上で、Y軸について変化させる。移動メカニズム614は、上述した移動メカニズム560(図9A)と同様である。図11に示す例において、装置位置及び方向検出器606は、遠位端628に置かれる。遠位端628の方向は、X−Z面上に置かれたベクトル630によって表される。遠位端628の最大長の画像を得るために、前記放射軸は、X−Z面上に置かれたベクトル632に沿って位置合わせされなければならず、ベクトル632は、ベクトル630とほぼ垂直である。
【0169】
送信機(図示せず)は、電磁信号を、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608に送信する。装置位置及び方向検出器606は、その位置及び方向の個々の信号を、配線634を介してMPS620に供給する。同様に、イメージャ位置及び方向検出器608は、イメージャ610の位置及び方向の個々の信号を、配線636を介してMPS620に供給する。代わりに、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608の各々は、MPS620に無線式に結合される。
【0170】
装置位置及び方向検出器606と、イメージャ位置及び方向検出器608とから受けた信号にしたがって、MPS620は、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608の位置及び方向を各々検出する。MPS620は、遠位端628の検出された位置及び方向と、イメージャ610の検出された位置及び方向の個々の信号を、プロセッサ622に供給する。
【0171】
プロセッサ622は、遠位端628がベクトル630に沿った方向を向き、前記放射軸がベクトル632に沿った方向を向かなければならないことを決定する。プロセッサ622は、信号を移動メカニズム614に供給し、イメージャ位置及び方向検出器608の検出された位置及び方向にしたがって、前記放射軸がベクトル632に沿った方向を向くように支持構造612を移動する。
【0172】
代わりに、システム600は、イメージャ位置及び方向検出器608がない。この場合において、移動メカニズム614の座標は、座標系Iと同期する。プロセッサ622は、装置位置及び方向検出器606から受けた信号のみにしたがってベクトル632の方向を決定し、移動メカニズム614に指示し、前記放射軸がベクトル632に沿った方向に向けられるように、支持構造612を移動する。プロセッサ622は、常にイメージャ610の位置及び方向の個々のどのようなフィードバック信号も受けることなく、メカニズム614を移動する。
【0173】
さらに代わりに、システム600は、プロセッサ622に結合されたユーザインタフェース(図示せず)を含み、臨床スタッフは、イメージャ610の所望の方向範囲の個々のデータを、前記ユーザインタフェースを介してプロセッサ622に入力する。プロセッサ622は、臨床スタッフによって入力された前記方向データの個々の信号を供給し、移動メカニズム614は、プロセッサ622から受けた前記信号にしたがって、イメージャ610を移動する。
【0174】
放射検出器618は、放射発生器616によって発生され、患者624の身体のセクションを通過する放射を検出し、前記身体のこのセクションの画像を発生する。放射検出器618は、信号をディスプレイ(図示せず)に供給し、前記ディスプレイは、前記身体のこのセクションの画像を表示する。この画像は、医療用介在装置604の興味ある部分の最適な表現(すなわち、遠位端628の最大の可能な長さの画像)を含む。
【0175】
図11に示す例において、前記医療用介在装置の遠位端は、前記イメージャが、前記イメージャの放射軸が前記医療用介在装置の遠位端の方向とほぼ垂直になる方向に向かって回転できるように、ある方向に沿った方向を向く。
【0176】
したがって、前記医療用介在装置の遠位端が、前記放射軸をこの方向に正確に垂直に位置合わせすることができない方向に沿った方向を向いている場合、前記イメージャは、前記遠位端の最も長い射影(すなわち、前記興味ある部分の最大の可能な長さ)の画像が得られる方向に移動される。
【0177】
代わりに又は加えて、移動メカニズム614と同様の移動メカニズム(図示せず)は、手術台及び前記MPSに結合される。この場合において、前記MPSは、前記移動メカニズムに指令し、前記イメージャが前記医療用介在装置の興味ある部分の最適な表現を含む画像を取得できるように、前記手術台を移動する。
【0178】
ここで、開示される技術の他の実施例にしたがって動作する、図11のシステムを動作する方法の図式的な例示である図12を参照する。手順650において、位置及び方向検出器に結合された医療用介在装置は、患者の体内に挿入される。図11の参照と共に、装置位置及び方向検出器606は、医療用介在装置604の興味ある部分(例えば、遠位端628)において配置され、医療用介在装置604は、患者624の体内に挿入される。次に、MPS620は、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608の位置及び方向を検出する(手順652)。イメージャ610の現在位置及び方向は、前記イメージャに埋め込まれたセンサから内部的に、又は、MPSセンサをイメージャ610に取り付けることによって外部的に得られることに注意されたい。
【0179】
手順654において、イメージャのイメージング方向は、前記イメージャが身体のセクションの画像を得ることができるように、前記検出された位置及び方向にしたがって決定され、前記画像は、前記医療用介在装置の興味ある部分の最適な表現を含む。図11の参照と共に、プロセッサ622は、前記医療用介在装置604の興味ある部分(すなわち、遠位端628)がベクトル622に沿った方向を向くことを決定する。プロセッサ622は、さらに、イメージャ610が、その放射軸がベクトル632に沿った方向を向く方向に移動されなければならないことを決定する。
【0180】
この方向において、イメージャ610は、遠位端628の方向に対してほぼ垂直な軸に沿って患者624の身体に照射することができる。したがって、この方向において、イメージャ610は、患者624の身体のセクションの画像を取得することができ、前記画像は、医療用介在装置604の興味ある部分の最適な表現を含む。
【0181】
プロセッサ622は、信号を移動メカニズム614に供給し、イメージャ610を手順654(手順656)で決定された方向に移動する。イメージャ610は、前記画像を取得し(手順658)、個々の信号をディスプレイに供給し、前記取得された画像を表示する(手順660)。
【0182】
開示される技術は、特に上記で示され説明されたものに限定されないことは、当業者によって認識されるであろう。開示される技術の範囲は、請求項によってのみ規定される。
【技術分野】
【0001】
開示される技術は、一般に医療装置に関係し、特に、患者の身体の画像を取得する方法及びシステムに関する。
【背景技術】
【0002】
患者の身体において手術を行う医師は、一般に、手術中の患者の身体内における医療用介在装置(例えば、カテーテル、針)の位置及び方向を見るために、リアルタイムイメージングシステムを用いる。このようなリアルタイムイメージングシステムは、技術において既知である。これらのシステムは、一般に、ディスプレイが、患者の身体の画像において重ねられた医療用介在装置の表現を表示することを可能にする。
【0003】
バニ ハシェミ(Bani-Hashemi)他に発行され、「3次元血管造影法再構成データと他の様相の共同位置合わせに基づくX線透視検査ベース3次元神経ナビゲーション」というタイトルが付けられた米国特許第6351513号は、血管の3次元血管造影法再構成内にカテーテルのリアルタイム3次元血管造影法画像を表示する方法に向けられている。この方法は、コンピュータ断層撮影法装置によって動脈樹の3次元血管造影法画像を取得する手順と、構造的類似性(すなわち、解剖学的目印)に従って前記3次元血管造影法画像に血管の2次元X線透視検査画像を位置合わせする手順とを含む。
【0004】
前記方法は、X線装置を使用することによってカテーテルの突き出たラインを決定する手順と、前記3次元血管造影法画像を前記突き出たラインと交差させ、前記カテーテルの3次元再構成の3次元視覚化を前記血管の3次元血管造影法再構成内に表示することによって、前記カテーテルの位置を決定する手順とをさらに含む。前記カテーテルの3次元視覚化は、前記カテーテルが移動するにつれて更新される。
【0005】
ベン ハイム(Ben-Haim)他に発行され、「マッピングボリュームを拡張したX線誘導外科位置システム」というタイトルが付けられた米国特許第6314310号は、患者の脊椎の選択された位置に針を挿入するシステムに向けられている。このシステムは、基準要素と、複数の磁界発生コイルと、ドライバ回路網と、コンピュータと、ユーザインタフェース制御部と、ディスプレイと、蛍光顕微鏡と、コンピュータ断層放射線写真(CT)装置とを含む。前記基準要素は、可視光及びX線に対して透明なプラスチックディスクの形態であり、その周辺における3つの等しく間隔をあけた金属基準マークと、その中心における第1位置及び方向検出装置と、前記第1位置及び方向検出装置に隣接する他の基準マークとを含む。前記針は、第2位置及び方向検出装置を含む。
【0006】
前記磁界発生コイルは、患者が横たわるベッド上に又はこれに隣接して置かれる。前記蛍光顕微鏡は、患者の身体の一方の側から患者にX線を照射する。前記コンピュータは、本システムの多くの態様を制御する。前記第1位置及び方向検出装置と前記第2位置及び方向検出装置とは、前記磁界発生コイルによって発生される時間変化する磁界の個々の信号を前記コンピュータに送る。前記コンピュータは前記信号を解析し、前記磁界発生コイルによって規定される基準の共通フレームに対する前記第1位置及び方向検出装置及び前記第2位置及び方向検出装置の6次元位置及び方向座標を決定する。前記コンピュータは、前記ディスプレイが、脊椎の画像と、前記第1位置及び方向検出装置及び前記第2位置及び方向検出装置の表現と、前記針及び基準マークの表現とを表示することを可能にする。前記基準要素の位置及び角度方向とは、前記基準マークの2次元座標を決定することによって決定される。スケーリング係数は、前記決定される座標を前記基準マークの既知の位置と比較することによって、前記ディスプレイにおいて表示される画像に関して決定される。
【0007】
患者の身体のCT画像を取得する間、前記基準要素は前記身体に固定され、手術中、この位置において前記身体に固定されたままである。前記CT画像は、前記CT画像において現れる前記基準要素の基準マークの画像派生座標を、前記X線画像における基準マークの画像派生座標と比較することによって、前記X線画像と位置合わせされる。前記基準要素の基準マークと、前記X線画像における基準マークとは、可視マークである。前記3次元CT画像は、前記CT画像を前記X線画像と位置合わせするために、回転又は拡大縮小され、前記CT画像は、前記X線画像の面上に投影され、前記X線画像に重ねられるか、前記X線画像と並んで表示される。
【0008】
クス(Kuth)他に発行され、「磁気共鳴システムによる被写体の画像を重ね合わせる方法と、前記方法を実現するための磁気共鳴システム」というタイトルが付けられた米国特許第6421551号は、患者の身体の画像の断層写真面を再調整するシステムに向けられている。このシステムは、制御コンソールと、磁気共鳴システムと、立体鏡映像カメラと、マーキング要素とを含む。前記制御コンソールは、制御ユニットと、画像データ発生器及びプロセッサと、座標変換ユニットと、再調整ユニットと、断層写真選択ユニットとを含む。前記磁気共鳴システムは、互いに向かい合って位置する2個のポールシューを含む。
【0009】
前記制御コンソールは、前記磁気共鳴システム及び前記立体鏡映像カメラに接続される。前記マーキング要素は、3個の反射性ボールから成り、第1座標系においてひざ関節の領域において患者に配置される。前記立体鏡映像カメラは、前記反射性ボールの画像を取得し、個々の位置データを前記制御コンソールに送る。前記座標変換ユニットは、前記位置データを、前記第1座標系から前記磁気共鳴システムの第2座標系に変換する。患者の相対的運動がわかっている場合、前記再調整ユニットは、以前に規定された断層写真面を、以前の関節位置においてあったように、再び前記ひざ関節に関するマーキング要素に対して位置するように再調整する。
【0010】
患者における腫瘍を破壊し、転移を防ぐある方法は、目標組織に放射線治療を施すことによる。ある形式の放射線治療は線形加速として知られ、これによって、X線又は電子のビームは、異なった方向から目標組織に向けられる。線形加速器がビームを目標組織の方向に向けるたびに、照射ビームの経路に沿った目標組織の周囲の健康な組織にも照射する。したがって、このような周囲の組織は、目標組織よりも少なく照射される。
【0011】
前記線形加速器は、目標組織の形状と一般的に同様な特定の体積を照射するようにプログラムされる。したがって、目標組織を含む身体の部分は、目標組織が前記特定の体積内に位置されるように配置されなければならない。従来の線形加速処理は、通常は数日又は数週間の期間に渡る複数の反復する手順を含む。その都度、目標組織を含む身体の部分は、最初の処理において配置されたように正確に配置されなければならない。
【0012】
この目的のために、最初の照射セッション中、目標組織を含む身体の部分を照射に適切な位置において配置した後、複数の危険でないレーザビーム、例えば4本のレーザビームが、固定された位置から身体の前記部分の方向に向けられる。これらの4つの点は、永続的なマーカ、例えば耐水性マーカによって、患者の皮膚においてマークされる。すべてのその後のセッションにおいて、身体の前記部分は、同じ4本のレーザビームを身体の同じ部分の方向に向け、前記4つの永続的なマークが前記4本のレーザビームと一列に並ぶまで前記部分を再位置決めすることによって、最初のセッションにおいて決定された位置及び方向に再位置決めされる。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】米国特許第6351513号明細書
【特許文献2】米国特許第6314310号明細書
【特許文献3】米国特許第6421551号明細書
【発明の概要】
【発明が解決しようとする課題】
【0014】
開示される技術の目的は、ある座標系において取得された画像を、他の座標系において取得された他の画像と位置合わせする新奇の方法及びシステムを提供することである。
【課題を解決するための手段】
【0015】
開示される技術によれば、第1画像を第2画像と位置合わせするシステムがこのようにして提供される。本システムは、患者の身体の第1位置及び方向を検出する第1医療位置決めシステムと、前記からだの第2位置及び方向を検出する第2医療位置決めシステムと、位置合わせモジュールとを含む。前記位置合わせモジュールは、第2イメージャと、前記第2医療位置決めシステムとに結合される。
【0016】
前記第1医療位置決めシステムは、第1イメージャに関係付けられ、これに結合される。前記第1イメージャは、前記身体から前記第1画像を取得し、前記第1画像を前記第1位置及び方向と関係付けることによって前記第1画像を発生する。前記第2医療位置決めシステムは、前記第2イメージャに関係付けられ、これに結合される。前記第2イメージャは、前記第2画像を取得し、前記第2画像に前記第2位置及び方向に関係付ける。前記位置合わせモジュールは、前記第1位置及び方向と前記第2位置及び方向にしたがって、前記第1画像を前記第2画像と位置合わせする。
【0017】
加えて、本システムは、前記第1イメージャと前記位置合わせモジュールとに結合される画像データベースを含むことができる。前記第1イメージャは、前記第1座標系において取得された前記第1画像の個々のデータを前記画像データベースに格納し、前記位置合わせモジュールは、前記第1画像を前記第2画像と位置合わせするために、このデータを前記画像データベースから検索する。
【0018】
開示される技術の他の態様によれば、第1画像を第2画像と位置合わせする方法がこのようにして提供される。本方法は、第1座標系における患者の身体の第1位置及び方向を第1医療位置決めシステムによって検出する手順と、前記第1座標系における前記第1画像の座標の第1の集合を決定する手順とを含む。
【0019】
本方法は、第2座標系における前記身体の第2位置及び方向を、第2医療位置決めシステムによって検出する手順と、前記第2座標系における前記第2画像の座標の第2の集合を決定する手順とをさらに含む。本方法は、前記座標の第1の集合を前記座標の第2の集合と位置合わせする手順をさらに含む。
【0020】
開示される技術の他の態様によれば、患者の身体の一部を、多数の治療セッション中、前記身体の選択された組織を自動的に医学的に治療する治療装置に適切な同じ治療位置及び方向において再位置決めする装置がこのようにして提供される。本システムは、位置決めユーザインタフェースと、位置及び方向検出器と、医療位置決めシステムとを含む。
【0021】
前記位置及び方向検出器は、前記選択された組織に関係付けられた選択された位置において配置される。前記医療位置決めシステムは、記憶ユニットと、前記位置決めユーザインタフェースと、位置及び方向検出器とに結合される。前記医療位置決めシステムは、前記位置及び方向検出器の初期位置及び方向を検出し、その間、前記選択された組織は、治療位置及び方向において配置される。前記医療位置決めシステムは、前記位置決めユーザインタフェースを介して、前記位置及び方向検出器が前記初期位置及び方向において再び配置されるときを示し、これによって、前記選択された組織が前記治療位置及び方向において再び配置されることを確立する。
【0022】
開示される技術の他の態様によれば、多セッション自動治療手順中、患者の身体の一部を再位置決めする方法がこのようにして提供される。本方法は、位置及び方向検出器の初期位置及び方向を検出する手順と、前記初期位置及び方向を記録する手順とを含む。本方法は、各々の反復する医学的治療の開始時において、前記位置及び方向検出器の現在の位置及び方向を検出する手順と、前記現在の位置及び方向が前記記録された位置及び方向と実質的に同じであるか否かを示す手順とをさらに含む。前記初期位置及び方向は、前記身体の選択された組織を自動的に治療するのに好適な治療位置及び方向に関係付けられる。
【0023】
開示される技術の他の態様によれば、患者の身体内の選択された組織を医学的に治療するシステムがこのようにして提供される。本システムは、第1医療位置決めシステムと、第2医療位置決めシステムと、前記第2医療位置決めシステムと治療装置とに結合される位置合わせモジュールとを含む。
【0024】
前記第1医療位置決めシステムは、位置及び方向検出器が該第1医療位置決めシステムに結合される場合、第1座標系における前記位置及び方向検出器の第1位置及び方向を検出する。前記位置及び方向検出器は、前記選択された組織に関係付けられた選択された位置において配置される。前記第2医療位置決めシステムは、前記位置及び方向検出器が該第2医療位置決めシステムに結合される場合、第2座標系における前記位置及び方向検出器の第2位置及び方向を検出する。
【0025】
前記位置合わせモジュールは、前記第1座標系における前記選択された組織の座標の集合を、前記第2座標系と位置合わせし、ここで、前記座標の集合は、前記第1位置及び方向に関係付けられる。前記治療装置は、前記位置合わせされた座標の集合にしたがって、前記選択された組織を医学的に治療する。
【0026】
開示される技術の他の態様によれば、患者の身体内の選択された組織を医学的に治療する方法がこのようにして提供される。本方法は、第1医療位置決めシステムによって第1座標系における検出器の第1位置及び方向を検出する手順と、前記第1座標系における前記選択された組織の座標の集合を前記第1位置及び方向に関係付ける手順とを含む。
【0027】
本方法は、第2医療位置決めシステムによって第2座標系における前記検出器の第2位置及び方向を検出する手順と、前記第2位置及び方向にしたがって、前記関係付けられた座標の集合を前記第2座標系に位置合わせする手順とをさらに含む。前記検出器は、前記選択された組織に関係付けられた選択された位置において配置される。
【0028】
開示される技術の他の態様によれば、イメージャを移動メカニズムによって、患者の身体のセクションに関して所望の方向に調節し、前記身体のセクションの視覚的表現を取得するシステムがこのようにして提供される。前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含む。前記医療用介在装置は、前記患者の身体のセクション中に挿入される。
【0029】
本システムは、医療位置決めシステムと、前記医療位置決めシステム及び前記移動メカニズムに結合されるプロセッサと、前記医療用改造装置に前記興味ある部分において結合され、前記医療位置決めシステムに結合される装置位置及び方向検出器とを含む。前記医療位置決めシステムは、前記装置位置及び方向検出器の装置位置及び方向を検出する。前記医療位置決めシステムは、前記装置位置及び方向を前記プロセッサに供給する。前記プロセッサは、前記装置位置及び方向にしたがって所望の方向を決定し、前記プロセッサは、前記移動メカニズムに命令し、前記イメージャを前記所望の方向に移動させる。
【0030】
加えて、本システムは、前記イメージャ及び前記医療位置決めシステムに結合されるイメージャ位置及び方向検出器を具えることができる。前記医療位置決めシステムは、前記イメージャのイメージャ位置及び方向を検出し、前記イメージャ位置及び方向を前記プロセッサに供給する。前記プロセッサは、前記所望の方向を、前記装置位置及び方向と前記イメージャ位置及び方向とにしたがって決定する。
【0031】
開示される技術の他の態様によれば、イメージャを所望の方向へ調節し、患者の身体のセクションの視覚的表現を取得する方法がこのようにして提供される。前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含む。本方法は、前記興味ある部分において前記医療用介在装置に結合される位置及び方向検出器の装置位置及び方向を検出する手順と、前記イメージャが前記視覚的表現を取得できるように、前記装置位置及び方向にしたがって所望の方向を決定する手順とを含む。本方法は、移動メカニズムに命令し、前記イメージャを前記所望の方向に移動させる手順をさらに含む。本方法は、前記イメージャに結合されるイメージャ位置及び方向検出器のイメージャ位置及び方向を検出する手順と、前記イメージャ位置及び方向から前記イメージャの位置及び方向を決定する手順とをさらに含むことができる。
【図面の簡単な説明】
【0032】
【図1A】開示される技術の一実施例にしたがって構成され動作する、第1イメージャによって取得された第1画像を第2イメージャによって取得された第2画像と位置合わせするシステムの図式的な図解である。
【図1B】図1Aのシステムの前記第1画像を取得する部分の図式的な図解である。
【図1C】図1Aのシステムの前記第2画像を取得し、前記第1画像を前記第2画像と位置合わせする他の部分の図式的な図解である。
【図1D】図1Aのシステムの第1医療位置決めシステム(MPS)及び第2MPSの各々の図式的な図解である。
【図2A】開示される技術の他の実施例にしたがって構成され動作する、第1再生画像を、第2イメージャによって取得された第2画像と位置合わせするシステムの図式的な例示である。
【図2B】前記第1再生画像を複数の2次元画像から再生する、図1Aのシステムの一部の図式的な例示である。
【図2C】前記第2画像を取得し、前記第1再生画像を前記第2画像と位置合わせする、図1Aのシステムの他の部分の図式的な例示である。
【図2D】医療用介在装置に取り付けられる画像検出器によって前記第2画像を取得する、図1Aのシステムの部分の図式的な例示である。
【図3A】患者の身体において配置され、開示される技術の他の実施例にしたがって、画像のスケールファクタを決定する2個の身体位置及び方向検出器の図式的例示である。
【図3B】図1Aの第1イメージャと同様の第1イメージャによって取得される患者の身体の第1画像の図式的な例示である。
【図3C】図1Aの第2イメージャと同様の第2イメージャによって取得される患者の身体の第2画像の図式的な例示であり、前記第2画像のスケールは、図3Bの第1画像のスケールと異なる。
【図3D】図3Cの第2画像のスケールに従って修正された図3Bの第1画像の図式的な例示である。
【図4】開示される技術の他の実施例にしたがって構成され動作する、第1MPS及び第2MPSが一般に390で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である。
【図5】開示される技術の他の実施例にしたがって構成され動作する、前記第1MPS及び前記第2MPSの各々が、一般に430で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である。
【図6】開示される技術の他の実施例にしたがって動作する、図1Aのシステムを動作する方法の図式的な例示である。
【図7】開示される技術の他の実施例に従って構成され動作する、複数の異なった治療セッション中に患者の選択された組織を医療的に治療するシステムの図式的な例示である。
【図8】開示される技術の他の実施例にしたがって動作する、図7のシステムを動作する方法の図式的な例示である。
【図9A】開示される技術の他の実施例に従って構成され動作する、イメージャの座標系において規定された選択された組織の境界を、治療装置の座標系と位置合わせするシステムの図式的な例示である。
【図9B】図9Aのシステムの照射計画部分の図式的な例示である。
【図9C】図9Aのシステムの照射治療部分の図式的な例示である。
【図10】開示される技術の他の実施例にしたがって動作する、図9Aのシステムを動作する方法の図式的例示である。
【図11】開示される技術の他の実施例にしたがって構成され動作する、医療用介在装置の画像を取得するシステムの図式的な例示である。
【図12】開示される技術の他の実施例にしたがって動作する、図11のシステムを動作する方法の図式的な例示である。
【発明を実施するための形態】
【0033】
開示される技術は、先行技術の欠点を、非視覚的位置合わせシステム及び方法を提供することによって克服する。開示される技術の方法は、基本的に、第1座標系における第1画像の座標を非視覚的に決定する手順と、第2座標系における第2画像の座標を非視覚的に決定する手順と、前記決定された座標にしたがって前記第1画像を前記第2座標系に位置合わせする手順とを含む。前記第1座標系のスケーリングと前記第2座標系のスケーリングとが同じでない場合、前記第1画像のスケールを前記第2画像のスケールに一致するように変更し、前記第1画像及び第2画像が一緒に示される場合、これらが同じスケールであるようにする。さらに、カテーテル、針、鉗子等の医療用介在装置の表現は、前記医療用介在装置に取り付けられる検出器を介して前記医療用介在装置の位置及び方向を検出することによって、前記第1画像に重ねられることができる。
【0034】
以下の記述において、座標系は、直交、極、円柱等であってもよい。以下の用語“画像”は、直接取得されるか、生の測定値から再構成された、患者の身体の選択された部分のどのような形式の視覚的表現にも関係することに注意されたい。このような画像は、1、2又は3次元、静止画像、又は時間において展開する画像において提供されることができる。以下に言及されるMPSシステムのいずれもが、これらに関係付けられる装置又はシステムに、物理的(すなわち、これらに関して固定された位置において)又は論理的(すなわち、同じ座標系内で双方が協調する場合)に結合されてもよいことに注意されたい。以下の記述において、医療用介在装置は、カテーテル(例えば、バルーンカテーテル、ステントカテーテル、外科用カテーテル、希釈カテーテル)、薬剤供給ユニット(例えば、針、コーティングされたステント又はバルーンを有するカテーテル、小線源照射療法ユニット)、組織切断ユニット(例えば、鉗子、アブレーションカテーテル)等であってもよい。
【0035】
ここで、図1A、1B、1C及び1Dを参照する。図1Aは、開示される技術の一実施例にしたがって構成され動作する、一般に100で示される、第1イメージャによって取得された第1画像を第2イメージャによって取得された第2画像と位置合わせするシステムの図式的な図解である。図1Bは、図1Aのシステムの前記第1画像を取得する部分の図式的な図解である。図1Cは、図1Aのシステムの前記第2画像を取得し、前記第1画像を前記第2画像と位置合わせする他の部分の図式的な図解である。図1Dは、一般に180で示される、図1Aのシステムの第1医療位置決めシステム(MPS)及び第2MPSの各々の図式的な図解である。
【0036】
図1Aの参照と共に、システム100は、第1MPS102と、第1イメージャ104と、画像データベース106と、第2イメージャ108と、第2MPS110と、位置合わせモジュール112とを含む。第1MPS102及び第2MPS110の各々は、3次元ボディ(図示せず)の位置及び方向を、前記3次元ボディに取り付けられる位置及び方向検出器(図示せず)から受信される信号にしたがって決定する装置である。第1MPS102及び第2MPS110の各々は、参照によってここに含まれる米国特許第6233476号のMPSと同様である。第1MPS102及び第2MPS110の各々は、複数の検出器から受信される信号において三角形分割操作を行うことによって3次元ボディの位置及び方向を決定する位置及び方向決定装置に置き換えることができる。これらの代わりの位置及び方向決定装置は、図4及び5に関して以下に説明される。
【0037】
画像データベース106は、磁気メモリユニット(例えば、フロッピー(登録商標)ディスク、ハードディスク、磁気テープ)、光メモリユニット(例えば、コンパクトディスク)、揮発性電子メモリユニット(例えば、ランダムアクセスメモリ)、不揮発性電子メモリユニット(例えば、読み出し専用メモリ、フラッシュメモリ)、リモートネットワーク記憶ユニット等のようなデータ記憶ユニットである。第1イメージャ104及び第2イメージャ108の各々は、患者の身体(図示せず)の画像を取得する装置(例えば、蛍光透視法、超音波、核磁気共鳴−NMR、光学イメージング、サーモグラフィ、核イメージング−PET)である。位置合わせモジュール112は、前記第1画像を前記第2画像と位置合わせするモジュールである。
【0038】
第1イメージャ104は、第1MPS102及び画像データベース106に結合される。第2イメージャ108は、第2MPS110に結合される。位置合わせモジュール112は、画像データベース106、第2イメージャ108及び第2MPS110に結合される。
【0039】
代わりに、本システムは、各々がMPSシステムに関係付けられ、すべてがネットワーク(例えば、LAN、WAN、有線又は無線)を経て一緒に結合される複数の医療システム(例えば、イメージャ、自動治療システム)を含む。これらのMPSシステムの各々は、これらと関係する個々の医療システムと空間的にキャリブレートされ、双方が同じ座標系を共有するか、前記医療システムの座標系と前記MPSシステムの座標系との間で変換できるようにされることに注意されたい。
【0040】
図1Bの参照と共に、身体位置及び方向検出器130は、患者132の身体に取り付けられる。身体位置及び方向検出器130は、参照によってここに含まれる米国特許第6233476号のセンサと同様である。身体位置及び方向検出器130は、患者132の肌(図示せず)に取り付けられるか、肌の下に配置されるか、患者132の身体内に埋め込まれる。このようにして、身体位置及び方向検出器130は、患者132の身体に固定される。第1MPS102は、身体位置及び方向検出器130と第1イメージャ104とに結合される。第1イメージャ104は、画像データベース106に結合される。
【0041】
第1MPS102は、X1、Y1、Z1座標系(すなわち座標系I)に関係付けられる。第1イメージャ104は、第1イメージャ104の位置及び方向が座標系Iに関して規定されるように、第1MPS102とキャリブレートされる。身体位置及び方向検出器130は、その位置及び方向の個々の信号を第1MPS102に供給する。第1MPS102は、座標系Iにおける身体位置及び方向検出器130の位置及び方向を、身体位置及び方向検出器130から受けた信号にしたがって決定する。第1MPS102は、身体位置及び方向検出器130の位置及び方向の個々の信号を第1イメージャ104に供給する。第1イメージャ140は、患者132の身体の第1画像134を取得し、座標系Iにおける第1画像134の座標の集合と、座標系Iにおける身体位置及び方向検出器130の座標と共に、画像データベース106に記憶する。
【0042】
一般に、システム100のこの部分(すなわち、患者132の身体から第1画像134を取得する段階)は、患者132における医療操作を行う前に行われる。したがって、図1Bにおいて例示されるような画像取得段階は、図1Cにおいて例示されるような画像取得及び医療操作段階とは異なった物理的位置において行われ得る。
【0043】
図1Cの参照と共に、第2MPS110は、体位置及び方向検出器130と、装置位置及び方向検出器154と、第2イメージャ108と、位置合わせモジュール112とに結合される。位置合わせモジュール112は、画像データベース106及び第2イメージャ108に結合される。
【0044】
臨床スタッフは、患者132において医療操作を行う間、第2イメージャ108は、患者132の身体の第2画像(例えば、第2画像150)を取得する。第2MPS110は、X2、Y2、Z2座標系(すなわち座標系II)に関係付けられる。第2イメージャ108は、第2イメージャ108の位置及び方向が座標系IIに関して規定されるように、第2MPS110とキャリブレートされる。
【0045】
身体位置及び方向検出器130は、その位置及び方向の個々の信号を第2MPS110に供給する。第2MPS110は、座標系IIにおける身体位置及び方向検出器130の位置及び方向を、身体位置及び方向検出器130から受けた信号にしたがって決定する。第2MPS110は、身体位置及び方向検出器130の位置及び方向の個々の信号を第2イメージャ108に供給する。第2イメージャ108は、座標系IIにおける第2画像150の座標の集合を、座標系IIにおける位置及び方向検出器130の位置及び方向と関係付け、個々の信号を位置合わせモジュール112に供給する。
【0046】
位置合わせモジュール112は、画像データベース106から、座標系Iにおける第1画像134の座標の集合と、座標系Iにおける身体位置及び方向検出器130の座標との個々のデータを取り出す。位置合わせモジュール112は、座標系Iにおける身体位置及び方向検出器130の位置及び方向を、座標系IIにおける身体位置及び方向検出器130の位置及び方向と位置合わせする。この方法において、位置合わせモジュール112は、元は座標系Iにおいて取得された第1画像134を座標系IIと位置合わせし、第1画像134及び第2画像150の双方が同じ座標系II内で一緒に表されることができるようにする。位置合わせモジュール112は、位置及び方向検出器を用いることによって、どのような可視マークもなしで、第1画像134を第2画像150と位置合わせすることに注意されたい。
【0047】
座標系Iのスケールが座標系IIのスケールと正確に同じでない場合において、位置合わせモジュール112は、第1画像134のスケールを、座標系Iと座標系IIとの間のスケールファクタに従って変更することができる。このスケールファクタは、位置合わせモジュール112において記憶される。この目的のため、図3Aに関係して後述されるように、身体位置及び方向検出器130と同様の2個以上の位置及び方向検出器が用いられることができる。
【0048】
身体位置及び方向検出器130は、患者132の身体における選択された点又は身体の中に固定され、患者132の身体に対して同じ位置及び方向を実質的に保つ。身体位置及び方向検出器130は、身体位置及び方向検出器130を第1MPS102から分離し、体位置及び方向検出器130を第2MPS110に接続するために、有線であってもよく、コネクタ(図示せず)を含むことができる。代わりに、身体位置及び方向検出器130は、無線であってもよい。
【0049】
第2イメージャ108による画像取得前、又は画像取得中、医療用介在装置152は、患者132の体内に挿入されてもよい。装置位置及び方向検出器154は、医療用介在装置152に結合される。図1Cにおいて上述した例において、医療用介在装置154はカテーテルであり、装置位置及び方向検出器154は、前記カテーテルの遠位端において配置される。図1Aにおいて上述した例において、第1イメージャ104はCT装置であり、第2イメージャ108はX線装置である。
【0050】
装置位置及び方向検出器154は、前記カテーテルの遠位端の位置及び方向の個々の信号を第2MPS110に供給する。第2MPS110は、座標系IIにおける前記カテーテルの遠位端の位置及び方向を、装置位置及び方向検出器154から受けた信号にしたがって決定する。第2MPS110は、前記カテーテルの遠位端の位置及び方向の個々の信号を位置合わせモジュール112に供給する。
【0051】
図1Cの例において、第2イメージャ108はX線装置であり、前記カテーテルは放射エネルギーを通さない材料で形成され、第2画像150は、前記カテーテルのリアルタイム画像並びに患者132の身体の画像を含む。
【0052】
位置合わせモジュール112を、単に座標を座標系Iから座標系IIに変換及びスケーリングするか、画像処理を行う(例えば、画像を重ね、装置の視覚的表現を加える)ように適合させることができる。例えば、位置合わせモジュール112は、第2MPS110から受けた信号にしたがって、医療用介在装置152の遠位端のリアルタイム表現158を第1画像134に重ねることができる。位置合わせモジュール112は、第1画像134及び第2画像150の個々のビデオ信号をディスプレイ(図示せず)に供給し、前記ディスプレイは、第1画像134を第2画像150と一緒に表示する。このようにして、臨床スタッフは、第2画像150における医療用介在装置152のリアルタイム画像156を、第1画像134における医療用介在装置152のリアルタイム表現158と一緒に見ることができる。
【0053】
他の例において、位置合わせモジュール112は、第1画像134を座標系IIにおいて位置合わせした後に、第1画像134を第2画像150に重ねる。この場合において、重ね合わされた画像(図示せず)は、前記第1画像と、前記第2画像と、前記医療用介在装置のリアルタイム画像又は前記医療用介在装置のリアルタイム視覚的表現とを含む。
【0054】
図1Dの参照と共に、MPS180は、位置及び方向プロセッサ182と、送信機インタフェース184と、複数のルックアップテーブルユニット1861、1862及び1863と、複数のデジタルアナログ変換器(DAC)1881、1882及び1883と、増幅器190と、送信機192と、複数のMPSセンサ(すなわち、位置及び方向検出器)1941、1942、1943及び194Nと、複数のアナログデジタル変換器(ADC)1961、1962、1963及び196Nと、センサインタフェース198とを含む。
【0055】
送信機インタフェース184は、位置及び方向プロセッサ182と、ルックアップテーブルユニット1861、1862及び1863とに結合される。DACユニット1881、1882及び1883は、ルックアップテーブル1861、1862及び1863のそれぞれ1つと、増幅器190とに結合される。増幅器190は、さらに送信機192に結合される。送信機192は、TXとも記される。MPSセンサ1941、1942、1943及び194Nは、さらに各々RX1、RX2、RX3及びRXNと記される。
【0056】
アナログデジタル変換器(ADC)1961、1962、1963及び196Nは、各々、センサ1941、1942、1943及び194Nと、センサインタフェース198とに結合される。センサインタフェース198は、さらに、位置及び方向プロセッサ182に結合される。
【0057】
ルックアップテーブルユニット1861、1862及び1863の各々は、周期的な数列を発生し、個々のDACユニット1881、1882及び1883に供給し、個々のDACユニット1881、1882及び1883は、前記周期的な数列を個々のアナログ信号に変換する。前記アナログ信号の各々は、それぞれ異なった空間軸である。本例において、ルックアップテーブル1861及びDACユニット1881はX軸に関する信号を発生し、ルックアップテーブル1862及びDACユニット1882はY軸に関する信号を発生し、ルックアップテーブル1863及びDACユニット1883はZ軸に関する信号を発生する。
【0058】
DACユニット881、1882及び1883は、これらの個々のアナログ信号を増幅器190に供給し、増幅器190は前記アナログ信号を増幅し、増幅された信号を送信機192に供給する。送信機192は、多軸電磁界を供給し、この多軸電磁界は、MPSセンサ1941、1942、1943及び194Nによって検出されることができる。MPSセンサ1941、1942、1943及び194Nの各々は、電磁場を検出し、個々の電気アナログ信号を発生し、これらに結合される個々のADCユニット1961、1962、1963及び196Nに供給する。ADCユニット1961、1962、1963及び196Nの各々は、これらに供給される前記アナログ信号をデジタル化し、数列に変換し、センサインタフェース198に供給し、センサインタフェース198は、この数列を位置及び方向プロセッサ182に供給する。
【0059】
位置及び方向プロセッサ182は、受けた数列を解析し、これによって、MPSセンサ1941、1942、1943及び194Nの各々の位置及び方向を決定する。位置及び方向プロセッサ182は、さらに、歪みイベントを決定し、ルックアップテーブル1861、1862及び1863を適宜更新する。
【0060】
開示される技術の他の態様によれば、プロセッサは、第1イメージャによって取得される複数の2次元画像を、第1器官タイミングモニタによって取得される器官タイミング信号(例えば、ECG)における各々の2元画像の位置と関係付ける。前記プロセッサは、各々の前記2次元画像の個々の位置及び方向と、前記器官タイミング信号内のその位置とにしたがって、前記2次元画像から複数の3次元画像を再構成し、前記プロセッサは、前記再構成された3次元画像を画像データベースに記憶する。位置合わせモジュールは、第2器官タイミングモニタによって検出された現在時点に従って前記画像データベースから3次元画像を取り出し、前記位置合わせモジュールは、前記取り出された3次元画像を、第2イメージャによって取得された他の画像と位置合わせする。
【0061】
ここで、図2A、2B、2C及び2Dを参照する。図2Aは、開示される技術の他の実施例にしたがって構成され動作する、第1再生画像を、第2イメージャによって取得された第2画像と位置合わせする、一般に220で示されるシステムの図式的な例示である。図2Bは、前記第1再生画像を複数の2次元画像から再生する、図2Aのシステムの一部の図式的な例示である。図2Cは、前記第2画像を取得し、前記第1再生画像を前記第2画像と位置合わせする、図2Aのシステムの他の部分の図式的な例示である。図2Dは、医療用介在装置に取り付けられる画像検出器によって前記第2画像を取得する、図2Aのシステムの部分の図式的な例示であり、前記システムのこの部分は、前記第1再生画像を前記第2画像と位置合わせする。
【0062】
図2Aの参照と共に、システム220は、プロセッサ222と、第1イメージャ224と、第1MPS226と、第1器官タイミングモニタ228と、画像データベース230と、位置合わせモジュール232と、第2イメージャ234と、第2MPS236と、第2器官タイミングモニタ238とを含む。プロセッサ222は、参照によってここに含まれる米国特許出願第09/782528号のメインコンピュータと同様である。第1イメージャ224及び第2イメージャ234は、図1Aの参照と共に上述した第1イメージャ104及び第2イメージャ108と同様である。第1器官タイミングモニタ228及び第2器官タイミングモニタ238の各々は、心臓、肺、まぶた等のような検査される器官のパルスレートを監視する装置である。第1MPS226及び第2MPS236の各々は、図1Dの参照と共に上述したMPS180と同様である。
【0063】
プロセッサ222は、第1イメージャ224と、第1MPS226と、第1器官タイミングモニタ228と、画像データベース230とに結合される。第1イメージャ224は、第1MPS226に結合される。位置合わせモジュール232は、第2イメージャ234と、第2MPS236と、第2器官タイミングモニタ238と、画像データベース230とに結合される。第2イメージャ234は、第2MPS236に結合される。
【0064】
図2Bの参照と共に、器官タイミングモニタ260は、身体位置及び方向検出器130(図1B)が患者132の身体に取り付けられる方法におけるのと同様に、患者262の身体に取り付けられる。第1パルスセンサ264は、心臓、肺、まぶた等のような患者262の器官(図示せず)に取り付けられる。器官タイミングセンサ260は、第1MPS226に結合される。第1パルスセンサ264は、第1器官タイミングモニタ228に結合される。プロセッサ222は、第1イメージャ224と、第1MPS226と、第1器官タイミングモニタ228と、画像データベース230とに結合される。第1イメージャ224は、第1MPS226に結合される。
【0065】
第1MPS226は、器官タイミングセンサ260から受けた信号にしたがって、X1、Y1、Z1座標系(すなわち、座標系I)における器官タイミングセンサ260の位置及び方向を決定する。第1MPS226は、決定された器官タイミングセンサ260の位置及び方向の個々の信号をプロセッサ222及び第1イメージャ224に供給する。第1イメージャ224は、患者262の身体から複数の2次元画像を取得し、取得された2次元画像の各々を、決定された器官タイミングセンサ260の位置及び方向と関係付ける。第1イメージャ224は、関係付けられた2次元画像の個々の信号をプロセッサ222に供給する。第1器官タイミングモニタ228は、第1パルスセンサ264から受けた信号にしたがって、患者262の器官のタイミング信号を決定し、第1器官タイミングモニタ228は、前記タイミング信号の個々の信号をプロセッサ222に供給する。前記タイミング信号は、例えば、心臓(図示せず)のQRS波であってもよい。
【0066】
プロセッサ222は、前記2次元画像の各々を、前記タイミングシングの現在時間点と関係付ける。プロセッサ222は、器官タイミングセンサ260の位置及び方向と、前記タイミング信号の時間点とにしたがって、前記2次元画像から複数の3次元画像を再構成する。プロセッサ222は、前記再構成された3次元画像を画像データベース230に記憶する。
【0067】
図2Cの参照と共に、位置合わせモジュール232は、第2イメージャ234と、第2MPS236と、第2器官タイミングモニタ238と、画像データベース230とに結合される。第2イメージャ234は、第2MPS236に結合される。器官タイミングセンサ260及び装置位置及び方向検出器282は、第2MPS236に結合される。第2パルスセンサ284は、第2器官タイミングモニタ238に結合される。
【0068】
医療用介在装置280は、患者262の体内に挿入される。図2Cにおいて示した例において、医療用介在装置280はカテーテルである。装置位置及び方向検出器282は、医療用介在装置280の遠位端において配置される。装置位置及び方向検出器282は、医療用介在装置280の遠位端の位置及び方向を検出する。第2パルスセンサ284は、患者262の、第1パルスセンサ264が取り付けられるのと同じ器官に取り付けられる。第1パルスセンサ264及び第1器官タイミングモニタ228は、各々、第2パルスセンサ284及び第2器官タイミングモニタ238の代わりに、図2Cの実施例において用いられることができることが注意される。
【0069】
第2MPS236は、器官タイミングセンサ260から受けた信号にしたがって、X2、Y2、Z2座標系(すなわち、座標系II)における器官タイミングセンサ260の位置及び方向を決定する。第2MPS236は、さらに、装置位置及び方向検出器282から受けた信号にしたがって、医療用介在装置280の遠位端の位置及び方向を決定する。第2MPS236は、決定された器官タイミングセンサ260の位置及び方向の各々の信号を、位置合わせモジュール232及び第2イメージャ234に供給する。第2MPS236は、決定された医療用介在装置280の遠位端の位置及び方向の個々の信号を、位置合わせモジュール232に供給する。
【0070】
第2イメージャ234は、患者262の身体から第2画像(例えば、図2Cにおいて例示されるような第2画像286)を取得し、前記第2画像を、決定された患者262の身体の位置及び方向に関係付ける。第2イメージャ234は、前記関係付けられた第2画像の個々の信号を位置合わせモジュール232に供給する。第2器官タイミングモニタ238は、第2パルスセンサ284から受けた信号にしたがって、患者262の器官のタイミング信号を決定し、第2器官タイミングモニタ238は、前記タイミング信号の個々の信号を位置合わせモジュール232に供給する。
【0071】
位置合わせモジュール232は、決定された患者262の身体の位置及び方向と、前記決定されたタイミング信号の現在時間点とにしたがって、画像データベース230から3次元画像(例えば、図2Cにおいて例示されるような3次元画像288)を取り出す。位置合わせモジュール232は、第1画像134(図1C)及び第2画像150に関して上述したのと同様の方法において、座標系Iにおいて取得された3次元画像288を、座標系IIにおいて取得された第2画像286をすでに含む座標系IIと位置合わせする。
【0072】
位置合わせモジュール232は、3次元画像288と、第2画像286と、医療用介在装置280の遠位端の視覚的表現と、医療用介在装置280のリアルタイム画像との異なった組み合わせを発生する。例えば、位置合わせモジュール232は、医療用介在装置280(この場合においてカテーテル)の遠位端のリアルタイムの視覚的表現290を、前記取り出された3次元画像に重ね、これによって3次元画像288を発生する。位置合わせモジュール232は、個々のビデオ信号をディスプレイ(図示せず)に供給する。前記ディスプレイは、3次元画像288を第2画像286と一緒に表示する。
【0073】
他の例において、位置合わせモジュール232は、3次元画像288を第2画像286に重ねる。第2画像286は、医療用介在装置280のリアルタイム画像292を含んでもよい。この場合において、臨床スタッフは、患者262の器官の疑似リアルタイム3次元画像(すなわち、3次元画像288)上の医療用介在装置280リアルタイム視覚的表現290を見ることができ、3次元画像288は、前記器官のタイミング信号にしたがって絶えず更新される。さらに、臨床スタッフは、一般に前記疑似リアルタイム3次元画像(すなわち、3次元画像288)より少ない情報を含む前記器官のリアルタイム画像(すなわち、第2画像286)上の医療用介在装置280のリアルタイム画像292を見ることができる。
【0074】
図2Dの参照と共に、位置合わせモジュール232は、第2イメージャ316と、第2MPS236と、第2器官タイミングモニタ238と、画像データベース230とに結合される。第2イメージャ316は、第2MPS236及び画像検出器314に結合される。装置位置及び方向検出器312及び器官タイミングセンサ260は、第2MPS236に結合される。第2パルスセンサ284は、第2器官タイミングモニタ238に結合される。
【0075】
カテーテルのような医療用介在装置310は、患者262の体内に挿入される。身体位置及び方向検出器312及び画像検出器314は、医療用介在装置310の遠位端において配置される。画像検出器314は、参照によってここに含まれる米国特許出願第09/949160号の画像検出器と同様である。したがって、画像検出器314は、光干渉断層計(OCT)イメージング素子、血管内超音波検査法(IVUS)変換器、磁気共鳴イメージング(MRI)素子、サーモグラフィイメージング素子、血管造影法素子等であってもよい。第2イメージャ316は、画像検出器314から受けた信号にしたがって、第2画像(例えば、図2Dにおいて例示されるような第2画像318)を発生する。
【0076】
第2MPS236は、器官タイミングセンサ260から受けた信号にしたがって、座標系IIにおける器官タイミングセンサ260の位置及び方向を決定する。第2MPS236は、装置位置及び方向検出器312から受けた信号にしたがって、医療用介在装置310の遠位端の位置及び方向を決定する。第2MPS236は、決定された器官タイミングセンサ260の位置及び方向の個々の信号を、位置合わせモジュール232及び第2イメージャ316に供給する。第2MPS236は、決定された医療用介在装置310の位置及び方向の個々の信号を、位置合わせモジュール232に供給する。
【0077】
画像検出器314は、周囲の物体(例えば、血管の内膜)の個々の信号を第2イメージャ316に供給し、第2イメージャ316は、受けた前記信号にしたがって、第2画像318のような第2画像を発生する。第2イメージャ316は、前記第2画像を、決定された器官タイミングセンサ260の位置及び方向に関係付ける。第2イメージャ316は、関係付けられた第2画像の個々の信号を、位置合わせモジュール232に供給する。第2器官タイミングモニタ238は、第2パルスセンサ284から受けた信号にしたがって、患者262の器官のタイミング信号を決定し、第2器官タイミングモニタ238は、前記タイミング信号の個々の信号を位置合わせモジュール232に供給する。
【0078】
位置合わせモジュール232は、決定された器官タイミングセンサ260の位置及び方向と、決定されたタイミング信号の現在時間点とにしたがって、画像データベース230から3次元画像(例えば、図2Dにおいて例示されるような3次元画像320)を取り出す。位置合わせモジュール232は、第1画像134(図1C)及び第2画像150に関係して上述したのと同様の方法において、座標系Iにおいて取得された3次元画像320を、座標系IIにおいて取得された第2画像318と位置合わせする。
【0079】
位置合わせモジュール232は、3次元画像320と、第2画像318と、医療用介在装置310の遠位端の視覚的表現と、医療用介在装置310のリアルタイム画像との異なった組み合わせを発生する。例えば、位置合わせモジュール232は、医療用介在装置310(この場合において、カテーテル)の遠位端のリアルタイム視覚的表現322を、取り出された前記3次元画像上に重ね、これによって、3次元画像320を発生する。位置合わせモジュール232は、個々のビデオ信号をディスプレイ(図示せず)に供給する。このディスプレイは、3次元画像320を第2画像318と一緒に表示する。
【0080】
他の例において、位置合わせモジュール232は、3次元画像320を第2画像318上に重ねる。第2画像318は、医療用介在装置310のリアルタイム視覚的表現324を含むことができる。
【0081】
ここで、図3A、3B、3C及び3Dを参照する。図3Aは、患者の身体において配置され、開示される技術の他の実施例にしたがって、画像のスケールファクタを決定する2個の身体位置及び方向検出器の図式的例示である。図3Bは、図1Aの第1イメージャと同様の第1イメージャによって取得される患者の身体の第1画像の図式的な例示である。図3Cは、図1Aの第2イメージャと同様の第2イメージャによって取得される患者の身体の第2画像の図式的な例示であり、前記第2画像のスケールは、図3Bの第1画像のスケールと異なる。図3Dは、図3Cの第2画像のスケールに従って修正された図3Bの第1画像の図式的な例示である。
【0082】
身体位置及び方向検出器350及び352は、患者(図示せず)の身体354に取り付けられる。身体位置及び方向検出器350及び352の各々は、身体位置及び方向検出器130(図1A)が患者132の身体に取り付けられる方法と同様の方法において、身体354に取り付けられる。身体位置及び方向検出器350及び352は、システム100(図1A)のようなシステムに結合される。したがって、身体位置及び方向検出器350及び352は、画像取得中、第1MPS102(図1B)と同様の第1MPSに結合されることができ、医療操作が患者において行われている間、第2MPS110(図1C)と同様の第2MPSに結合されることができる。
【0083】
第2イメージャ108と同様の第2イメージャが結合される位置合わせモジュール112(図1C)と同様の位置合わせモジュールは、各々前記第1イメージャ及び前記第2イメージャによって発生される前記第1画像及び前記第2画像のスケールファクターを知らない。身体位置及び方向検出器350と352との間の距離は、文字Lによって示される。
【0084】
図3Bの参照と共に、第1イメージャ104(図1B)と同様の第1イメージャは、身体354の器官(図示せず)の第1画像356をディスプレイ(図示せず)において発生する。身体位置及び方向検出器350及び352は、前記ディスプレイにおいて2個のマーク358及び360によって各々表され、マーク358と360との間の距離は、L1によって示される。
【0085】
図3Cの参照と共に、第2イメージャ108(図1C)と同様の第2イメージャは、前記ディスプレイにおいて前記器官の第2画像362を発生する。身体位置及び方向検出器350及び352は、前記ディスプレイにおいて2個のマーク364及び366によって各々表され、マーク364と366との間の距離は、L2によって示される。
【0086】
図3B及び3Cにおいて示す例において、第1画像356のスケールは、第2画像362のスケールの2倍である(すなわち、L1=2L2)。前記第1画像及び前記第2画像の正しい印象を観察者(図示せず)に与えるため、前記第1画像及び前記第2画像は、実質的に同じスケールにおいて表示されなければならない。
【0087】
図3Dの参照と共に、前記位置合わせモジュールは、第1画像356を200%スケールダウンし、これによって、他の第1画像368を発生する。身体位置及び方向検出器350及び352は、前記ディスプレイにおいて2個のマーク370及び372によって各々表され、マーク370と372との間の距離は、L1によって示される(すなわち、マーク358と360との間の距離と同じ)。したがって、第1画像368及び第2画像362は、実質的に同じスケールにおいて、並んで表示される。
【0088】
ここで、開示される技術の他の実施例にしたがって構成され動作する、第1MPS及び第2MPSが一般に390で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である図4を参照する。座標決定ユニット(CDU)390は、トランシーバ392と、プロセッサ394と、複数のセンシングユニット3961、3962及び396Nとを含む。
【0089】
システム100(図1A)と同様のシステムにおいて、第1MPS102は第1CDUに交換されることができ、第2MPS110は第2CDUに交換されることができる。前記第1CDUは、第1トランシーバ及び第1プロセッサを含み、前記第2CDUは、第2トランシーバ及び第2プロセッサを含む。前記第1CDUは、座標系I(図1B)と同様の第1座標系に関係付けられ、前記第2CDUは、座標系II(図1C)ど同様の第2座標系に関係付けられる。
【0090】
前記第1プロセッサは、前記第1トランシーバと、第1イメージャ104(図1A)と同様の第1イメージャとに結合され、前記第2プロセッサは、第2イメージャ108と同様の第2イメージャと、位置合わせモジュール112と同様の位置合わせモジュールとに
結合される。図1Bにおいて例示したのと同様の画像取得段階において、センシングユニット3961、3962及び396Nは、前記第1トランシーバに結合される。図1Cにおいて例示したのと同様の画像位置合わせ段階において、センシングユニット3961、3962及び396Nは、前記第2トランシーバに結合される。
【0091】
センシングユニット3961、3962及び396Nの各々は、身体位置及び方向検出器130(図1B)が患者132の身体に取り付けられる方法と同様に、患者(図示せず)の体398に取り付けられる。センシングユニット3961、3962及び396Nの各々は、位置検出器及び方向検出器を含む。前記位置検出器は、電磁コイル、ソナーセンサ(例えば、超音波)等であってもよい。
【0092】
前記方向検出器は、ミニチュアのジャイロスコープ等であってもよい。この形式のジャイロスコープは、発振チップ搭載素子及び複数のセンサを含み、ドイツのBEI Systron Donner Inertial DivisionによってGyroChip(登録商標)の下で販売される。前記発振素子は水晶素子によって発振され、前記センサは、該センサの軸の周りの前記発振素子の回転に比例する電流を発生する。トランシーバ392は、プロセッサ394と、センシングユニット3961、3962及び396Nとに結合される。
【0093】
トランシーバ392は、信号(例えば、電磁又は音響)を、センシングユニット3961、3962及び396Nの各々の前記位置検出器に向けて送信する。センシングユニット3961、3962及び396Nの各々の前記位置検出器は、これらの位置の個々の信号を、個々の配線を経てトランシーバ392に送信する。センシングユニット3961、3962及び396Nの各々の前記方向検出器は、これらの方向の個々の信号を、他の個々の配線を経てトランシーバ392に送信する。プロセッサ394は、トランシーバ392によって受信された信号にしたがって、身体398の位置及び方向を決定する。
【0094】
加えて、医療用介在装置400は、身体398の中に挿入されることができ、センシングユニット402は、医療用介在装置400の遠位端に取り付けられることができ、センシングユニット402は、トランシーバ392に結合されることができる。センシングユニット402は、センシングユニット3961、3962及び396Nの各々と同様である。この場合において、プロセッサ394は、センシングユニット402から受信された信号にしたがって、医療用介在装置400の遠位端の位置及び方法を決定することができる。
【0095】
さらに加えて、超音波変換器、OCT素子、MRI素子、サーモグラフィ素子、血管造影法等のようなイメージャ404は、身体398の画像を取得するのに用いられることができる。この場合において、センシングユニット406は、イメージャ404に取り付けられ、センシングユニット406は、トランシーバ392に結合される。センシングユニット406は、センシングユニット3961、3962及び396Nの各々と同様である。プロセッサ394は、トランシーバ392によってセンシングユニット406及びセンシングユニット3961、3962及び396Nから受けた信号にしたがって、イメージャ404の位置及び方向を決定する。
【0096】
ここで、開示される技術の他の実施例にしたがって構成され動作する、前記第1MPS及び前記第2MPSの各々が、一般に430で示される座標決定ユニットによって置き換えられた、図1Aのシステムの一部の図式的な例示である図5を参照する。座標決定ユニット430は、複数の受信機4321、4322及び432Nと、プロセッサ434と、複数の送信機4361、4362及び436Nとを含む。送信機4361、4362及び436Nは、身体位置及び方向検出器130(図1B)が患者132の身体に取り付けられるのと同様の方法において、患者(図示せず)の身体438に取り付けられる。受信機4321、4322及び432Nは、プロセッサ434に結合される。
【0097】
送信機4361、4362及び436Nの各々は、信号を受信機4321、4322及び432Nに送信する。この信号は、電磁気(例えば、無線周波数、ラジオパルス)、光(例えば、赤外線)、音響(超音波)等であってもよい。プロセッサ434は、受信機4321、4322及び432Nから受信された信号にしたがって、三角法を用いて、身体438の位置及び方向を決定する。
【0098】
ここで、開示される技術の他の実施例にしたがって動作する、図1Aのシステムを動作する方法の図式的な例示である図6を参照する。手順460において、患者の身体の第1位置及び方向は、第1座標系において、第1医療位置決めシステムによって検出される。図1Bの参照と共に、第1MPS102は、身体位置及び方向検出器130から受けた信号にしたがって、座標系Iにおける患者132の身体の位置及び方向を決定する。第1MPS102及び身体位置及び方向検出器130は、座標決定ユニット390(図4)又は座標決定ユニット430(図5)のいずれかと交換されることができることに注意されたい。
【0099】
手順462において、患者の身体の第1画像は、第1イメージャによって取得される。図1Bの参照と共に、第1イメージャ104は、患者132の身体の第1画像134を取得する。
【0100】
手順464において、前記第1画像の座標の第1の集合は、前記第1座標系において決定される。図1Bの参照と共に、第1イメージャ140は、座標系Iにおける第1画像134の座標の集合を決定し、画像データベース106に、この座標の集合を、手順460において検出された身体位置及び方向検出器130の座標と共に記憶する。
【0101】
手順466において、患者の身体の第2位置及び方向は、第2座標系において、第2医療位置決めシステムによって検出される。図1Cの参照と共に、第2MPS110は、身体位置及び方向検出器130から受けた信号にしたがって、座標系IIにおける身体位置及び方向検出器130の位置及び方向を決定する。第2MPS110及び身体位置及び方向検出器130は、座標決定ユニット390(図4)又は座標決定ユニット430(図5)のいずれかによって置き換えられることができることに注意されたい。
【0102】
手順468において、患者の身体の第2画像は、第2イメージャによって取得される。図1Cの参照と共に、第2イメージャ108は、患者132の身体の第2画像150を取得する。
【0103】
手順470において、前記第2画像の座標の第2の集合は、第2座標系において決定される。図1Cの参照と共に、第2イメージャ108は、座標系IIにおける第2画像150の座標の集合を決定し、座標のこの集合を、手順466において検出される身体位置及び方向検出器130の座標と関係付ける。
【0104】
手順472において、前記座標の第1の集合は、前記第2座標系において位置合わせされ、結果として、前記座標の第2の集合と位置合わせされる。図1Cの参照と共に、位置合わせモジュール112は、座標系Iにおける第1画像134の座標の集合の個々のデータを、画像データベース106から取り出す。位置合わせモジュール112は、座標系IIにおける第2画像150の座標の集合の個々の信号と、座標系IIにおける身体位置及び方向検出器130の座標の個々の信号とを、第2イメージャ108から受ける。位置合わせモジュール112は、座標系IIにおける第1画像を、結果として第2画像150と、座標系Iにおける身体位置及び方向検出器130の座標を座標系IIにおける身体位置及び方向検出器130と位置合わせすることによって、位置合わせする。
【0105】
位置合わせモジュール112は、医療用介在装置152の遠位端の位置及び方向の個々の信号も第2MPS110から受ける。位置合わせモジュール112は、医療用介在装置152の遠位端のリアルタイム視覚的表現158を第1画像134に重ねる。第1画像134及び第2画像150は、ディスプレイにおいて並べて表示されるか、互いに重ねられて表示される。
【0106】
開示される技術の他の態様によれば、患者の身体の選択された組織の選択された位置及び方向は、医療位置決めシステムによって、治療装置に対して再帰的に得られる。選択された組織に関して前記治療装置によって有効に医療的に治療されるのに適切なものである選択された位置及び方向は、第1治療中一度検出される。すべてのその後の治療の開始時において、患者の身体の位置は、前記検出器の現在検出されている位置及び方向が、前記選択された位置及び方向と一致するように再位置決めされる。
【0107】
言葉「選択された組織」は、以下で、(例えば、照射又は外科によって)手術されるべき、患者の身体の内部(すなわち、身体の内臓)又は外部(例えば、皮膚、つめ又は角膜)の組織のことをさす。前記選択される組織は、(照射の場合において)増殖(すなわち、過度の細胞数を有する組織)、新形成(新たな組織の形成)、良性腫瘍、悪性腫瘍、癌腫等のような身体の器官の腫瘍的部分、又は、(外科の場合において)脳、肝臓、肺、腎臓等のような身体の器官の非腫瘍的部分であってもよい。
【0108】
ここで、一般的に500で示され、開示される技術の他の実施例に従って構成され動作する、複数の異なった治療セッション中に患者の選択された組織を医療的に治療するシステムの図式的な例示である図7を参照する。システム540は、MPS502と、位置決めユーザインタフェース504と、記憶ユニット506と、治療装置508と、移動メカニズム510とを含む。
【0109】
MPS502は、上述した第1MPS102(図1A)と同様である。位置決めユーザインタフェース504は、触覚、聴覚、視覚、運動感覚ユーザインタフェース等である。記憶ユニット506は、ハードディスク、フロッピー(登録商標)ディスケット、コンパクトディスク、磁気テープ、フラッシュメモリ、ランダムアクセスメモリ、読み出し専用メモリ等のような、磁気メモリユニット、光学メモリユニット、集積回路等である。
【0110】
治療装置508は、線形加速器、局所ロボット外科装置、リモートテレビ外科装置等のような組織治療装置である。線形加速器は、高エネルギーX線及び電子ビームを発生し、空間における予め決められた体積又は点において位置する選択された組織を異なった方向から攻撃する装置である。局所ロボット外科装置は、同じ病院の制御室からのように、患者から実質的に近い距離から臨床スタッフによって操作される装置である。リモートテレビ外科装置は、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)、メトロポリタンエリアネットワーク(MAN)等のようなネットワークを介して、遠隔地から臨床スタッフによって操作される装置である。移動メカニズム510は、治療装置508を異なった方向に移動し、治療装置508が前記選択された組織を異なった方向から攻撃するのを可能にするために、治療装置508に結合される。一般において、移動メカニズムは、前記治療装置又は患者、又は双方を、互いに関して移動することに適合する。
【0111】
治療装置508は、例えば、1本の軸についての回転に対して自由である、すなわち、1自由度を有するCアームの形態であってもよい。代わりに、治療装置508は、2つ以上の自由度を有することもできる。図7に示す例において、治療措置508は線形加速器である。移動メカニズム510は、電気機械要素(例えば、ギア、プーリー及びベルトのようなパワー伝達要素を含む回転又は線形電気モータ)、電磁気要素(例えば、電磁コイル及びムービングコア、又は、ムービングコア及び電磁コア)、水力式要素、空気式要素等である。
【0112】
検出器512は、患者514の身体において、体内に位置する選択された組織516に関係付けられた選択された位置において挿入され、患者514が医療治療下にある間、この位置において固定される。検出器512は、上述した身体位置及び方向検出器(図1B)と同様である。検出器512は、前記身体において、侵襲的(例えば、切開を行うことによって)又は非侵襲的(例えば、針(図示せず)又はカテーテル(図示せず)の助けを借りて)に挿入される。カテーテルが用いられる場合において、検出器512は、前記カテーテルの遠位端に結合され、検出器512は、前記身体に、前記カテーテルの助けを借りて挿入される。検出器512は、治療期間全体の間、体内に置いておかれる。図7に示す例において、検出器512は、選択された組織516内に挿入される。
【0113】
検出器512は、配線520及びクイック分離プラグ(図示せず)によってMPS502に結合される。検出器512は、すべての治療セッションの開始前にMPS502にプラグで接続され、セッション後に分離される。MPS502は、位置決めユーザインタフェース504に結合される。代わりに、前記検出器はMPSに無線式に結合される。
【0114】
第1治療セッション中、臨床スタッフ(図示せず)は、患者514の身体の位置を、治療装置508が選択された組織516を効果的に治療するのに適した位置及び方向において選択された組織516が位置するような位置及び方向(すなわち、治療位置及び方向)に位置決めする。この点において、MPS502は、検出器512の位置及び方向(すなわち、初期位置及び方向)を検出し、臨床スタッフは、この初期位置及び方向を、位置決めインタフェース504を介して記憶ユニット506に記憶する。
【0115】
すべてのその後の治療セッション前に、臨床スタッフは、検出器512をMPS502に結合する。患者514は、手術台の上に横たわり、臨床スタッフは、患者514の身体の一部を、前記治療位置及び方向に位置決めし、検出器512の位置及び方向が前記記憶された位置及び方向と実質的に同じになるようにする。このとき、患者514のからだのこの部分は、前記第1治療セッションにおけるのと同じ位置及び方向にある。
【0116】
システム500は、臨床スタッフが、各々のその後の治療セッションにおいて患者514の身体を、前記第1セッションにおけるのと同じ位置及び方向に繰り返し再位置決めすることを可能にすることに注意されたい。手術台518は、治療セッション中、選択された組織をその場に固定するのに適合した他の制限装置に交換されることができることにさらに注意されたい。
【0117】
臨床スタッフは、身体の治療位置及び方向を、例えば、その後の治療セッションにおいて検出される検出器512の位置及び方向(すなわち、中間位置及び方向)を、前記第1治療セッション中に検出される位置及び方向(すなわち、初期位置及び方向)と比較することによって決定することができる。この目的のため、位置決めユーザインタフェース504は、これら2つの位置及び方向の、例えば、視覚的、聴覚的、運動感覚的等の表現を発生する。患者514の身体の一部の前記治療位置及び方向における位置決めし、この治療位置及び方向を保持した後、臨床スタッフは、治療装置508に命令し、選択された組織516を自動的に治療する(例えば、線形加速器を使用する場合、前記選択された組織に異なった方向から照射する)。
【0118】
コントローラ(図示せず)は、治療装置508及び移動メカニズム510に結合されることができる。本システムは、前記コントローラに結合される他の治療装置ユーザインタフェース(図示せず)をさらに含むことができる。前記コントローラは、プログラムされ、移動メカニズム510を制御し、治療装置508を、選択された組織516をこれらの方向から医療的に治療するために移動することができる。このプログラムは、固定されていて不変であり、前記コントローラに常時格納される。代わりに、臨床スタッフは、前記プログラムを、個々のパラメータを前記コントローラに前記治療装置ユーザインタフェースを介して入力することによって変更することができる。
【0119】
前記コントローラは、MPS502にさらに結合される。MPS502は、検出器512の位置及び方向を検出し、個々の信号を前記コントローラに供給する。前記コントローラは、移動メカニズム510に命令し、医療装置508をMPS502から受けた信号にしたがって閉ループにおいて(すなわち、MPS502からのフィードバックにしたがって)移動する。この方法において、前記コントローラは、移動メカニズム510に命令し、治療装置508の位置及び方向を、選択された組織516の位置及び方向における変化(すなわち、患者514の身体の運動)にしたがって変更する。
【0120】
このように、システム500は、患者514は拘束されず動くのが自由でありながら、臨床スタッフが患者514を治療することを可能にする。拘束されない位置における治療の質は、患者514の身体が拘束され、治療装置508が閉ループにおいて患者514の運動に追従しない場合と実質的に同じである。
【0121】
さらに代わりに、臨床スタッフは、選択された組織の境界の個々の座標の集合を前記医療装置ユーザインタフェースを介して前記コントローラに入力する。前記コントローラは、前記移動メカニズムを制御し、前記治療装置を、前記入力される座標の集合にしたがって、前記選択された組織を自動的に医療治療するため移動する。前記入力される座標の集合は、離散的(すなわち、数値)又は容量的(例えば、基準点からの球の半径、立方体の高さと幅と深さ、又は、円柱の底の半径及びその高さ)のいずれかであってもよい。
【0122】
さらに代わりに、前記移動メカニズムは、前記手術台に結合され、前記コントローラは、前記移動メカニズム及び前記治療装置ユーザインタフェースに結合される。臨床スタッフは、選択された組織の境界の個々の座標の集合を、前記治療装置ユーザインタフェースを介して前記コントローラに入力する。前記コントローラは、前記移動メカニズムを制御し、前記手術台を、前記入力された座標の集合に従って、前記治療装置が前記選択された組織を医療治療することを可能にするために移動する。
【0123】
さらに代わりに、前記移動メカニズムは、前記治療装置及び前記手術台に結合される。どのような場合でも、前記移動メカニズムは、前記治療装置が前記選択された組織を医療治療することを可能にするために、前記治療装置に対する前記選択された組織の運動を与える。
【0124】
代わりに、比較器(図示せず)は、MPS502と、記憶ユニット506と、位置決めユーザインタフェース504とに結合され、前記比較器は、その後の治療セッションにおける前記検出器の位置及び方向を、前記第1治療セッション中に検出される前記検出器の位置及び方向と比較する。前記比較器は、前記比較器が記憶された位置及び方向が現在検出される位置及び方向と実質的に同じであることを決定する場合、信号を供給する。
【0125】
位置決めユーザインタフェース504は、前記比較器から受けた前記信号にしたがって、可聴音、視覚的合図、触覚的指示のような指示を発生する。臨床スタッフは、この指示にしたがって、患者514の身体の一部が、選択された組織516が前記治療装置によって医療治療されるのに好適な位置及び方向において配置されたことを決定する。さらに代わりに、前記検出器は、臨床スタッフが、前記検出器が前記選択された位置及び方向において配置される場合、前記選択された組織の位置及び方向が医療治療に好適であることを保証することができるほど前記選択された装置に近い選択された位置において挿入されることができる。
【0126】
ここで、開示される技術の他の実施例にしたがって動作する、図7のシステムを動作する方法の図式的な例示である図8を参照する。手順522において、固定された検出器の初期位置及び方向は検出され、前記初期位置及び方向は、患者の身体の選択された組織を自動的に治療するのに好適な治療位置及び方向に関係付けられる。図7の参照と共に、検出器512が、選択された組織516を自動的に処理するのに治療装置508に好適な位置及び方向(すなわち、治療位置及び方向)にある場合、MPS502は、検出器512の位置及び方向を検出する。
【0127】
検出器512は、臨床スタッフによって、選択された組織516内に前もって挿入される。代わりに、前記位置及び方向検出器は、前記選択された組織に実質的に近い位置において挿入され(すなわち、前記位置及び方向検出器と前記選択された組織との間の空間的関係が常に変化しないままであるべきである)、臨床スタッフが、この位置及び方向が前記治療装置によって有効に治療される前記選択された組織に関する位置及び方向を決定することを保証できるようにする。
【0128】
手順524において、前記初期位置及び方向は記録される。図7の参照と共に、MPS502は、記憶ユニット506に、手順522において検出されるような検出器512の位置及び方向を記憶する。代わりに、臨床スタッフは、前記治療位置及び方向に一致する検出器512の位置及び方向の個々の座標の集合を、位置決めユーザインタフェース504を介して記憶する。この座標の集合は、例えば前記選択された組織の画像にしたがって、治療計画段階において決定されることができる。
【0129】
手順526において、各々の周期的な医療治療の開始時において、前記固定された検出器の現在位置及び方向が検出される。図7の参照と共に、各々のその後の治療セッション中、医療治療前に、臨床スタッフが、選択された組織516を含む患者514の身体の部分を移動する間、MPS502は、検出器512の位置及び方向を検出する。手順526に続いて、本方法は、手順528又は手順532のいずれかに進むことができる。
【0130】
手順528において、現在位置及び方向が、記録された初期位置及び方向と実質的に同じであるか否かが示される。図7の参照とともに、臨床スタッフが、選択された組織516を含む患者514の身体の部分を移動しながら、位置決めユーザインタフェース504は、検出器512の現在位置及び方向が、手順524において記録された位置及び方向と実質的に同じであるか否かを示す。位置決めユーザインタフェース504は、検出器512の現在位置及び方向と、記録された位置及び方向との個々の指示を(例えば、視覚的に)発生し、臨床スタッフは、患者514を適宜移動する。代わりに、位置決めユーザインタフェース504は、臨床スタッフに、検出器512の現在位置及び方向が、手順524において記録されるような初期位置及び方向と実質的に一致することを、(例えば、聴覚的に)通知する。
【0131】
手順530において、前記検出器を前記記録された初期位置及び方向において保持しながら、前記選択された組織は医療的に治療される。図7の参照と共に、臨床スタッフが、検出器512を、したがって選択された組織516を、手順524において記録された位置及び方向において保持しながら、治療装置508は、選択された組織516を(例えば、選択された組織516に異なった方向から照射して)医療的に治療する。
【0132】
手順532において、現在位置及び方向が記録された初期位置及び方向と実質的に同じ場合、治療装置は、選択された組織を自動的に治療するのに好適な方向に向けられる。この場合において、システム500(図7)と同様のシステムにおいて、前記MPSは前記治療装置に結合される。前記検出器の、したがって前記選択された組織の位置及び方向が、前記記録された初期位置及び方向と実質的に同じ場合は常に、前記MPSは、前記治療装置を、前記選択された組織を自動的に治療するように向ける。
【0133】
開示される技術の他の態様によれば、座標系の1つは、自動化された医療治療装置の座標系である。以下の例において、自動化医療治療システムは、選択された点に、これに交差する複数の軸を照射することによって照射するのに使用される線形加速器である。ここで、位置及び方向検出器は、患者の体内に、選択された組織に関係する選択された位置において置かれる。臨床スタッフは、計画段階において前記身体の一部の位置及び方向を決定し、前記検出器の位置及び方向を記録する。照射治療段階において、位置合わせモジュールは、前記照射治療段階における前記検出器の位置及び方向を、前記計画段階中に決定された前記検出器の位置及び方向と位置合わせする。臨床スタッフは、次に、前記身体の一部を、前記検出器の位置及び方向が前記計画段階において決定された前記検出器の位置及び方向と実質的に同じになるように再位置決めし、前記治療装置を前記選択された組織に照射するように向ける。
【0134】
ここで、図9A、9B及び9Cを参照する。図9Aは、開示される技術の他の実施例に従って構成され動作する、イメージャの座標系において規定された選択された組織の境界を、一般に540で示される治療装置の座標系と位置合わせするシステムの図式的な例示である。図9Bは、図9Aのシステムの照射計画部分の図式的な例示である。図9Cは、図9Aのシステムの照射治療部分の図式的な例示である。
【0135】
図9Aの参照と共に、システム540は、イメージャMPS542と、ユーザインタフェース544と、イメージャ546と、記憶ユニット548と、照射器MPS550と、位置合わせモジュール552と、照射ユニット554とを含む。照射ユニット554は、コントローラ556と、照射器558と、移動メカニズム560とを含む。イメージャ546は、イメージャMPS542と、ユーザインタフェース544と、記憶ユニット548とに結合される。記憶ユニット548は、イメージャMPS542に結合される。位置合わせモジュール552は、記憶ユニット548と、照射器MPS550と、照射ユニット554とに結合される。コントローラ556は、照射器558と、移動メカニズム560とに結合される。
【0136】
イメージャMPS542と、イメージャ546と、照射器MPS550と、位置合わせモジュール552は、上述した第1MPS102(図1A)と、第1イメージャ102と、第2MPS110と、位置合わせモジュール112と各々同様である。イメージャ546は、コンピュータトモグラフィ、超音波等の3次元型イメージャであってもよい。記憶ユニット548及び移動メカニズム560は、上述した記憶ユニット506(図7)及び移動メカニズム510と各々同様である。ユーザインタフェース544は、キーボード、マウス、スタイラス、マイクロホン、ディスプレイ(例えば、タッチスクリーンディスプレイ)等、又はこれらの組み合わせのような、触覚、聴覚、視覚等のユーザインタフェースである。照射器558は、治療装置508(図7)に関連して上述した線形加速器と同様である。
【0137】
図9Bの参照と共に、イメージャ546は、イメージャMPS542及び記憶ユニット548に結合される。イメージャMPS542は、検出器512(図7)が患者514の体内に置かれる方法と同様に、患者566の選択された組織564に関係付けられた選択された位置におかれる。代わりに、位置及び方向検出器562は、カテーテル、針等のような身体侵入装置(図示せず)を用いることによって、患者566の体内に、前記選択された位置に挿入されることができる。位置及び方向検出器562は、上述した身体位置及び方向検出器130(図1B)と同様である。患者566は、手術台568上に横たわる。
【0138】
イメージャMPS542は、X1、X2、X3座標系(すなわち、座標系I)に関係付けられる。イメージャ546は、イメージャ546の位置及び方向が座標系Iに関して規定されるように、イメージャMPS542によってキャリブレートされる。位置及び方向検出器562は、その位置及び方向の個々の信号を、配線570を経て(代わりに、無線式に)イメージャMPS542に供給する。イメージャMPS542は、位置及び方向検出器562から受けた前記信号にしたがって、座標系Iにおける位置及び方向検出器562の位置及び方向を決定する。
【0139】
イメージャMPS542は、位置及び方向検出器562の位置及び方向の個々の信号をイメージャ546に供給する。イメージャ546は、選択された組織564の組織画像574の計画段階画像572と、位置及び方向検出器562の検出器画像576の個々の信号を発生する。計画段階画像572は、2次元又は3次元のいずれかであってもよい。イメージャ546は、この信号をユーザインタフェース544に供給し、ユーザインタフェース544は、受けた信号にしたがって、計画段階画像572を表示する。検出器画像576は、位置及び方向検出器562のリアルタイム画像、又は、その表現のいずれかであってもよい。ユーザインタフェース544が検出器画像576を表示する必要はなく、検出器画像576は、開示される技術をより明確に説明するのに役に立つことに注意されたい。
【0140】
臨床スタッフは、イメージャ546によって発生された画像の選択されたスライスにおいて、マーキング578によって組織画像574の境界をマークする。イメージャ546は、次に、前記スライスにおけるマーキング526の座標にしたがって、選択された組織564の3次元画像の座標の集合を決定する。イメージャ546は、この座標の集合を、位置及び方向検出器562の座標と共に、記憶ユニット548に記憶する。
【0141】
代わりに、臨床スタッフは、位置及び方向検出器562の位置及び方向に関する選択された組織564の体積の個々の座標の集合を、ユーザインタフェース544を介して記憶ユニット548に入力する。入力される座標の集合は、離散的(すなわち、数値)又は容量的(例えば、基準点からの球の半径、立方体の高さと幅と深さ、又は、円柱の底の半径及びその高さ)のいずれかであってもよい。
【0142】
一般に、図9Bに例示されるようなシステム540の計画段階は、図9Cにおいて例示されるようなシステム540の照射段階とは物理的に異なった場所において行われる。したがって、配線570には、位置及び方向検出器562をイメージャMPS542から分離し、位置及び方向検出器562を照射器MPS550に接続するために、コネクタ(図示せず)が設けられる。しかしながら、位置及び方向検出器は、無線接続部を設けられることもできる。
【0143】
図9Cの参照と共に、位置合わせモジュール552は、記憶ユニット548と、照射器MPS550と、照射ユニット554とに結合される。位置及び方向検出器562は、配線570を介して照射器MPS550に結合される。
【0144】
照射器MPS550は、X2、Y2、Z2座標系(すなわち、座標系II)に関係付けられる。照射ユニット554は、照射ユニット554の位置及び方向が座標系IIに関して規定されるように、照射器MPS550によってキャリブレートされる。位置及び方向検出器562は、その位置及び方向の個々の信号を照射器MPS550に供給する。照射器MPS550は、位置及び方向検出器562から受けた信号にしたがって、座標系IIにおける位置及び方向検出器562の位置及び方向を決定する。照射器MPS550は、決定された位置及び方向の個々の信号を位置合わせモジュール552に供給する。
【0145】
システム540は、手動モード又は自動モードのいずれかにおいて操作されることができる。手動モードにおいて、移動メカニズム560は、照射ユニット558を移動し、空間において固定された点に異なった方向から自動的に照射することができる。しかしながら、移動メカニズム560は、前記固定された点以外の空間における点を照射するように照射ユニット558を移動することはできない。
【0146】
手動モードにおいて、位置合わせモジュール552は、照射ユニット554から照射ユニット554の座標系(すなわち、座標系II)の個々のデータを受ける。位置合わせモジュール552は、次に、座標系Iにおける位置及び方向検出器562の位置及び方向を、座標系IIにおける位置及び方向検出器562の位置及び方向と位置合わせする。臨床スタッフは、座標系IIにおける位置及び方向検出器562の位置及び方向が、前記手術台において決定された(すなわち、座標系Iにおける)位置及び方向と実質的に同じになるように、患者566の身体の部分を位置決めする。ここで、選択された組織564は、空間において固定された点において位置し、この点に向かって、照射器558は、異なった方向からの放射を向けるように設定される。この段階において、臨床スタッフは、移動メカニズムに指示し、照射器558を移動し、選択された組織564に異なった方向から自動的に照射する。
【0147】
システム540の動作の自動モードにおいて、移動メカニズム560は、照射器558の位置及び方向を調節し、患者566の身体の実質的にどのような選択された点も照射することができる。加えて、移動メカニズム560は、照射ユニット558を移動し、患者566の身体の選択された点に異なった方向から照射することができる。
【0148】
自動モードにおいて、位置合わせモジュール552は、記憶ユニット548から、座標系Iにおける選択された組織564の教科の座標の集合と、座標系Iにおける位置及び方向検出器562の座標の個々のデータを取り出す。位置合わせモジュール552は、座標系Iにおける位置及び方向検出器562の位置及び方向を、座標系IIにおける位置及び方向検出器562の位置及び方向と位置合わせする。
【0149】
位置合わせモジュール552は、座標系IIにおける選択された組織564の境界の座標の集合と、座標系IIにおけるその位置及び方向の個々の信号をコントローラ556に供給する。コントローラ556は、選択された組織564の境界を照射する照射器558に関する位置及び方向を、位置合わせモジュール552から受けた座標系IIにおける選択された組織564の座標の集合の個々のデータにしたがって決定し、個々の信号を移動メカニズム560に供給する。
【0150】
コントローラ566は、選択された組織564に異なった方向から照射する照射器558に関する複数の方向も決定し、これらの決定された方向の個々の信号を移動メカニズム560に供給する。移動メカニズム560は、照射器558も自動的に移動し、選択された組織564に異なった方向から照射する。
【0151】
システム540の動作の自動モードにおいて、臨床スタッフが患者556の身体の部分を照射器558に関して手動で位置決めする必要はないことに注意されたい。代わりに、移動メカニズム560は、照射器558を適切な位置及び方向に移動する。
【0152】
コントローラ556は、図7に関連して上述したように、移動メカニズム560に命令して、照射器558が選択された組織564に異なった方向から照射することを可能にするようにプログラムされることができる。座標系Iと座標系IIのスケールが異なる場合、位置合わせモジュール552は、図1Cに関連して上述したように、座標系IIにおいて位置及び方向検出器562の位置及び方向を位置合わせする間、これら2つの座標系の間のスケールファクタを適用する。
【0153】
代わりに、前記移動メカニズムは、前記手術台に結合される。この場合において、前記コントローラは、前記手術台の位置及び方向を決定し、患者556の身体を、照射器558が放射を選択された組織564の方に向けることができるように移動する。前記コントローラは、前記決定された方向の個々の信号を前記移動メカニズムに供給し、前記移動メカニズムは、前記コントローラから受けた信号にしたがって前記手術台を移動する。この場合においても、臨床スタッフが患者556の身体の部分を照射に適切な位置及び方向に手動で位置決めする必要はなく、代わりに、前記移動メカニズムがこの運動を行う。
【0154】
代わりに、前記移動メカニズムは、前記照射器及び手術台の双方に結合される。どのような場合においても、前記移動メカニズムは、前記選択された組織と照射器との間の相対運動を与える。
【0155】
ここで、開示される技術の他の実施例にしたがって動作する、図9Aのシステムを動作する方法の図式的例示である図10を参照する。手順580において、検出器は、患者の体内において、選択された組織に関係付けられた選択された位置において固定される。図9Bの参照と共に、位置及び方向検出器562は、患者522の体内において、選択された場所において挿入され、位置及び方向検出器562は、配線570を介してイメージャMPS542に結合される。
【0156】
手順582において、第1座標系における検出器の第1位置及び方向は、第1医療位置決めシステムによって検出される。図9Bの参照と共に、イメージャMPS542は、座標系Iにおける位置及び方向検出器562の位置及び方向を検出し、個々の信号をイメージャ546に供給する。
【0157】
手順584において、前記第1座標系における選択された組織の座標の集合は、前記第1位置及び方向に関係付けられる。図9Bの参照と共に、ユーザインタフェース544は、組織画像574及び検出器画像576を含む計画段階画像572を表示する。臨床スタッフは、組織画像574の境界を、ユーザインタフェース544を用いることによって、マーキング578によってマークする。イメージャ546は、マーキング578の座標の集合を、位置及び方向検出器562の座標と共に、記憶ユニット548に記憶するために供給する。
【0158】
代わりに、臨床スタッフは、位置及び方向検出器562の位置及び方向に関する選択された組織564の座標の集合を、前記ユーザインタフェースを介して入力し、この座標の集合を、位置及び方向検出器562の座標と共に、記憶ユニット548に記憶する。
【0159】
手順586において、第2座標系における前記検出器の第2位置及び方向は、第2医療位置決めシステムによって検出される。図9Cの参照と共に、患者522は、図9Bにおいて例示されるイメージング室とは通常異なる照射室内に置かれ、配線570は、照射器MPS550に結合される。照射器MPS550は、座標系IIにおける位置及び方向検出器562の位置及び方向を検出し、個々の信号を位置合わせモジュール552に供給する。
【0160】
手順588において、前記関係付けられた座標の集合は、前記第2位置及び方向にしたがって、前記第2座標系に位置合わせされる。図9Cの参照と共に、位置合わせモジュール552は、前記座標の集合を記憶ユニット548から取り出し、これらを、座標系IIにおける位置及び方向検出器562の位置及び方向にしたがって座標系IIに位置合わせする。位置合わせモジュール552は、さらに、データを座標系Iから座標系IIに変換する任意の変換情報(例えば、スケーリング)にしたがって、座標系Iにおける座標の集合を座標系IIに位置合わせする。
【0161】
位置合わせモジュール552は、前記位置合わせされた座標の集合の個々の信号を照射ユニット554に供給する(手順590)。手順592において、前記選択された組織は、前記位置合わせされた座標の集合にしたがって、異なった方向から照射される。図9A及び9Cの参照と共に、コントローラ556は、選択された組織564の体積に異なった方向から照射する照射器558に関する複数の方向を決定し、個々の信号を移動メカニズム560に供給する。移動メカニズム560は、コントローラ556から受けた信号にしたがって照射器558を移動する。
【0162】
代わりに、前記移動メカニズムは、前記手術台に結合され、前記照射器に関する前記患者の身体の一部の移動を可能にする。さらに代わりに、前記移動メカニズムは、前記手術台及び照射器の双方に結合される。すべての場合において、前記移動メカニズムは、前記選択された組織の前記照射器に関する移動を与える。
【0163】
開示される技術の他の態様によれば、医療位置決めシステムは、患者の体内に挿入される医療用介在装置に結合される検出器の位置及び方向を決定する。前記医療位置決めシステムは、イメージャに指示し、前記イメージャが前記医療用介在装置の興味ある部分の最大の可能な長さの画像を取得できるような方向に移動させる。この興味ある部分は、ディスプレイにおいて表示される。
【0164】
ここで、開示される技術の他の実施例にしたがって構成され動作する、一般に600で示される、医療用介在装置の画像を取得するシステムの図式的な例示である図11を参照する。システム600は、画像調節システム602と、MPS620と、医療用介在装置604と、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608と、イメージャ610とを含む。イメージャ610は、支持構造612と、移動メカニズム614と、放射発生器616と、放射検出器618とを含む。画像調節システム602は、MPS620と、プロセッサ622とを含む。
【0165】
医療用介在装置604は、患者624の体内に挿入される。患者624は、手術台626上に横たわる。装置位置及び方向検出器606は、医療用介在装置604の興味ある領域において、例えば、医療用介在装置604の遠位端628において、医療用介在装置604に結合される。イメージャ位置及び方向検出器608は、イメージャ610に取り付けられる。MPS620は、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608と、プロセッサ622とに結合される。プロセッサ622は、移動メカニズム614に結合される。イメージャ610は、患者624の画像(図示せず)を取得する装置である(例えば、蛍光透視法、超音波、核磁気共鳴−NMR、光学イメージング、サーモグラフィ、核イメージング−PET)。
【0166】
イメージャ610は、少なくとも3自由度を有する。MPS620は、X、Y、Z座標系(すなわち、座標系I)に関係付けられる。イメージャ610は、イメージャ610の位置及び方向が座標系Iに関して規定されるように、MPS620によってキャリブレートされる。
【0167】
図11に示す例において、イメージャ610は、X線型イメージャ(当該技術分野においてCアームイメージャとして知られる)である。したがって、放射発生器616及び放射検出器618は、放射発生器616が患者624の一方の側に置かれ、放射検出器618が患者624の反対側に置かれるように、支持構造612に結合される。放射発生器616及び放射検出器618は、放射軸(図示せず)上に置かれ、前記放射軸は患者624の身体と交差する。
【0168】
移動メカニズム614は、支持構造612に結合され、これによって、支持構造612がY軸について回転することを可能にする。移動メカニズム614は、支持構造612を回転し、これによって、前記放射軸の方向を、X−Z面上で、Y軸について変化させる。移動メカニズム614は、上述した移動メカニズム560(図9A)と同様である。図11に示す例において、装置位置及び方向検出器606は、遠位端628に置かれる。遠位端628の方向は、X−Z面上に置かれたベクトル630によって表される。遠位端628の最大長の画像を得るために、前記放射軸は、X−Z面上に置かれたベクトル632に沿って位置合わせされなければならず、ベクトル632は、ベクトル630とほぼ垂直である。
【0169】
送信機(図示せず)は、電磁信号を、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608に送信する。装置位置及び方向検出器606は、その位置及び方向の個々の信号を、配線634を介してMPS620に供給する。同様に、イメージャ位置及び方向検出器608は、イメージャ610の位置及び方向の個々の信号を、配線636を介してMPS620に供給する。代わりに、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608の各々は、MPS620に無線式に結合される。
【0170】
装置位置及び方向検出器606と、イメージャ位置及び方向検出器608とから受けた信号にしたがって、MPS620は、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608の位置及び方向を各々検出する。MPS620は、遠位端628の検出された位置及び方向と、イメージャ610の検出された位置及び方向の個々の信号を、プロセッサ622に供給する。
【0171】
プロセッサ622は、遠位端628がベクトル630に沿った方向を向き、前記放射軸がベクトル632に沿った方向を向かなければならないことを決定する。プロセッサ622は、信号を移動メカニズム614に供給し、イメージャ位置及び方向検出器608の検出された位置及び方向にしたがって、前記放射軸がベクトル632に沿った方向を向くように支持構造612を移動する。
【0172】
代わりに、システム600は、イメージャ位置及び方向検出器608がない。この場合において、移動メカニズム614の座標は、座標系Iと同期する。プロセッサ622は、装置位置及び方向検出器606から受けた信号のみにしたがってベクトル632の方向を決定し、移動メカニズム614に指示し、前記放射軸がベクトル632に沿った方向に向けられるように、支持構造612を移動する。プロセッサ622は、常にイメージャ610の位置及び方向の個々のどのようなフィードバック信号も受けることなく、メカニズム614を移動する。
【0173】
さらに代わりに、システム600は、プロセッサ622に結合されたユーザインタフェース(図示せず)を含み、臨床スタッフは、イメージャ610の所望の方向範囲の個々のデータを、前記ユーザインタフェースを介してプロセッサ622に入力する。プロセッサ622は、臨床スタッフによって入力された前記方向データの個々の信号を供給し、移動メカニズム614は、プロセッサ622から受けた前記信号にしたがって、イメージャ610を移動する。
【0174】
放射検出器618は、放射発生器616によって発生され、患者624の身体のセクションを通過する放射を検出し、前記身体のこのセクションの画像を発生する。放射検出器618は、信号をディスプレイ(図示せず)に供給し、前記ディスプレイは、前記身体のこのセクションの画像を表示する。この画像は、医療用介在装置604の興味ある部分の最適な表現(すなわち、遠位端628の最大の可能な長さの画像)を含む。
【0175】
図11に示す例において、前記医療用介在装置の遠位端は、前記イメージャが、前記イメージャの放射軸が前記医療用介在装置の遠位端の方向とほぼ垂直になる方向に向かって回転できるように、ある方向に沿った方向を向く。
【0176】
したがって、前記医療用介在装置の遠位端が、前記放射軸をこの方向に正確に垂直に位置合わせすることができない方向に沿った方向を向いている場合、前記イメージャは、前記遠位端の最も長い射影(すなわち、前記興味ある部分の最大の可能な長さ)の画像が得られる方向に移動される。
【0177】
代わりに又は加えて、移動メカニズム614と同様の移動メカニズム(図示せず)は、手術台及び前記MPSに結合される。この場合において、前記MPSは、前記移動メカニズムに指令し、前記イメージャが前記医療用介在装置の興味ある部分の最適な表現を含む画像を取得できるように、前記手術台を移動する。
【0178】
ここで、開示される技術の他の実施例にしたがって動作する、図11のシステムを動作する方法の図式的な例示である図12を参照する。手順650において、位置及び方向検出器に結合された医療用介在装置は、患者の体内に挿入される。図11の参照と共に、装置位置及び方向検出器606は、医療用介在装置604の興味ある部分(例えば、遠位端628)において配置され、医療用介在装置604は、患者624の体内に挿入される。次に、MPS620は、装置位置及び方向検出器606と、イメージャ位置及び方向検出器608の位置及び方向を検出する(手順652)。イメージャ610の現在位置及び方向は、前記イメージャに埋め込まれたセンサから内部的に、又は、MPSセンサをイメージャ610に取り付けることによって外部的に得られることに注意されたい。
【0179】
手順654において、イメージャのイメージング方向は、前記イメージャが身体のセクションの画像を得ることができるように、前記検出された位置及び方向にしたがって決定され、前記画像は、前記医療用介在装置の興味ある部分の最適な表現を含む。図11の参照と共に、プロセッサ622は、前記医療用介在装置604の興味ある部分(すなわち、遠位端628)がベクトル622に沿った方向を向くことを決定する。プロセッサ622は、さらに、イメージャ610が、その放射軸がベクトル632に沿った方向を向く方向に移動されなければならないことを決定する。
【0180】
この方向において、イメージャ610は、遠位端628の方向に対してほぼ垂直な軸に沿って患者624の身体に照射することができる。したがって、この方向において、イメージャ610は、患者624の身体のセクションの画像を取得することができ、前記画像は、医療用介在装置604の興味ある部分の最適な表現を含む。
【0181】
プロセッサ622は、信号を移動メカニズム614に供給し、イメージャ610を手順654(手順656)で決定された方向に移動する。イメージャ610は、前記画像を取得し(手順658)、個々の信号をディスプレイに供給し、前記取得された画像を表示する(手順660)。
【0182】
開示される技術は、特に上記で示され説明されたものに限定されないことは、当業者によって認識されるであろう。開示される技術の範囲は、請求項によってのみ規定される。
【特許請求の範囲】
【請求項1】
第1画像を第2画像と位置合わせするシステムにおいて、
患者の身体の第1位置及び方向を検出する第1医療位置決めシステムであって、前記第1医療位置決めシステムは第1イメージャに関係付けられ結合され、前記第1イメージャは、少なくとも1つの画像を前記身体から取得し、前記第1イメージャは、前記少なくとも1つの画像に前記第1位置及び方向を関係付けることによって前記第1画像を発生する、第1医療位置決めシステムと、
前記身体の第2位置及び方向を検出する第2医療位置決めシステムであって、前記第2医療位置決めシステムは第2イメージャに関係付けられ結合され、前記第2イメージャは、前記第2画像を取得し、前記第2画像を前記第2位置及び方向に関係付ける、第2医療位置決めシステムと、
前記第2イメージャ及び前記第2医療位置決めシステムに結合され、前記第1位置及び方向と前記第2位置及び方向とにしたがって、前記第1画像を前記第2画像と位置合わせする位置合わせモジュールとを具えることを特徴とする位置合わせシステム。
【請求項2】
請求項1に記載の位置合わせシステムにおいて、前記第1イメージャ及び前記位置合わせモジュールに結合された画像データベースをさらに具え、前記第1イメージャは前記第1画像を前記画像データベースに記憶し、
前記位置合わせモジュールは、前記第1画像を前記画像データベースから取り出すことを特徴とする位置合わせシステム。
【請求項3】
請求項1に記載の位置合わせシステムにおいて、前記第1医療位置決めシステムは、第1座標系に関係付けられ、
前記第2医療位置決めシステムは、第2座標系に関係付けられる位置合わせシステム。
【請求項4】
請求項1に記載の位置合わせシステムにおいて、前記身体に結合される身体位置及び方向検出器をさらに具え、前記第1医療位置決めシステムは、前記身体位置及び方向検出器が前記第1医療位置決めシステムに結合される場合、前記第1位置及び方向を検出し、
前記第2医療位置決めシステムは、前記身体位置及び方向検出器が前記第2医療位置決めシステムに結合される場合、前記第2位置及び方向を検出することを特徴とする位置合わせシステム。
【請求項5】
請求項1に記載の位置合わせシステムにおいて、医療用介在装置及び前記第2医療位置決めシステムに結合される装置位置及び方向検出器をさらに具え、前記第2医療位置決めシステムは、前記医療用介在装置の装置位置及び方向を検出し、
前記第2医療位置決めシステムは、前記装置位置及び方向の個々の位置及び方向信号を前記位置合わせモジュールに供給し、
前記位置合わせモジュールは、前記位置及び方向信号にしたがって、前記医療用介在装置の表現を発生することを特徴とする位置合わせシステム。
【請求項6】
請求項5に記載の位置合わせシステムにおいて、前記医療用介在装置は、
カテーテルと、
薬剤分配ユニットと、
組織切断ユニットと、
から成るリストから選択されることを特徴とする位置合わせシステム。
【請求項7】
請求項1に記載の位置合わせシステムにおいて、前記第1イメージャ及び前記第2イメージャをさらに具えることを特徴とする位置合わせシステム。
【請求項8】
請求項1に記載の位置合わせシステムにおいて、前記第1イメージャ及び前記第2イメージャの各々は、
蛍光透視法と、
超音波と、
サーモグラフィと、
核磁気共鳴と、
光学イメージングと、
から成るリストから選択されることを特徴とする位置合わせシステム。
【請求項9】
請求項1に記載の位置合わせシステムにおいて、前記位置合わせモジュールは、前記第1画像を前記第2画像上に重ねることを特徴とする位置合わせシステム。
【請求項10】
請求項1に記載の位置合わせシステムにおいて、前記位置合わせモジュールに結合され、前記第1画像及び前記第2画像の少なくとも1つを表示するディスプレイをさらに具えることを特徴とする位置合わせシステム。
【請求項11】
請求項1に記載の位置合わせシステムにおいて、
前記第1イメージャ及び前記位置合わせモジュールに結合されるプロセッサと、
前記プロセッサに結合される第1器官タイミングモニタであって、第1パルスセンサが、検査される器官及び及び前記第1器官タイミングモニタに結合される場合、前記第1器官タイミングモニタは前記検査される器官のタイミング信号を検出する、第1器官タイミングモニタと、
前記位置合わせモジュールに結合される第2器官タイミングモニタであって、第2パルスセンサが、前記検査される器官及び前記第2器官タイミングモニタに結合される場合、前記第2器官タイミングモニタは前記タイミング信号を検出する、第2器官タイミングモニタとをさらに具え、
前記プロセッサは、前記少なくとも1つの画像を、前記第1位置及び方向の各々と、前記タイミング信号の個々の時間ポイントとに関係付けることによって再生し、
前記位置合わせモジュールは、前記個々の第1位置及び方向と、前記第2位置及び方向の各々と、前記個々の時間ポイントとにしたがって、前記第1画像を前記第2画像に位置合わせすることを特徴とする位置合わせシステム。
【請求項12】
請求項11に記載の位置合わせシステムにおいて、前記プロセッサ及び前記位置合わせモジュールに結合される画像データベースをさらに具え、前記プロセッサは、前記第1画像を前記画像データベースに記憶し、
前記位置合わせモジュールは、前記第1画像を前記画像データベースから取り出すことを特徴とする位置合わせシステム。
【請求項13】
請求項1に記載の位置合わせシステムにおいて、前記身体に結合される少なくとも2個のボディ位置及び方向検出器をさらに具え、前記第1医療位置決めシステムは、前記少なくとも2個のボディ位置及び方向検出器が前記第1医療位置決めシステムに結合される場合、前記第1位置及び方向を検出し、
前記第2医療位置決めシステムは、前記少なくとも2個のボディ位置及び方向検出器が前記第2医療位置決めシステムに結合される場合、前記第2位置及び方向を検出し、
前記位置合わせモジュールは、前記少なくとも2個のボディ位置及び方向検出器間の距離にしたがって、前記第1画像及び第2画像のスケールを調節することを特徴とする位置合わせシステム。
【請求項14】
請求項1に記載の位置合わせシステムにおいて、前記第1医療位置決めシステムは、
前記身体に結合される複数のセンシングユニットと、
前記センシングユニットに結合される第1トランシーバと、
前記第1トランシーバ及び前記第1イメージャに結合され、前記センシングユニットが前記第1トランシーバに結合される場合、前記第1トランシーバから受ける第1信号にしたがって、前記第1位置及び方向を決定する第1プロセッサとを具え、
前記第2医療位置決めシステムは、
前記センシングユニットと、
前記センシングユニットに結合される第2トランシーバと、
前記位置合わせモジュール及び前記第2イメージャに結合され、前記センシングユニットは、前記センシングユニットが前記第2トランシーバに結合される場合、前記第2トランシーバから受けた第2信号にしたがって前記第2位置及び方向を決定することを特徴とする位置合わせシステム。
【請求項15】
請求項14に記載の位置合わせシステムにおいて、前記センシングユニットの各々は、位置検出器及び方向検出器を具えることを特徴とする位置合わせシステム。
【請求項16】
請求項15に記載の位置合わせシステムにおいて、前記位置検出器は、
電磁コイル及び
ソナーセンサ
から成るリストから選択されることを特徴とする位置合わせシステム。
【請求項17】
請求項15に記載の位置合わせシステムにおいて、前記方向検出器はジャイロスコープであることを特徴とする位置合わせシステム。
【請求項18】
請求項14に記載の位置合わせシステムにおいて、
前記第1トランシーバ及び前記第1イメージャに結合される第1センシングユニットであって、前記第1プロセッサは、前記第1トランシーバから受けた第1信号にしたがって前記第1イメージャの第1イメージャ位置及び方向を決定する、第1センシングユニットと、
前記第2トランシーバ及び前記第2イメージャに結合される第2センシングユニットであって、前記第2プロセッサは、前記第2トランシーバから受けた第2信号にしたがって前記第2イメージャの第2イメージャ位置及び方向を決定する、第2センシングユニットとをさらに具えることを特徴とする位置合わせシステム。
【請求項19】
請求項14に記載の位置合わせシステムにおいて、医療用介在装置及び前記第2トランシーバに結合されるセンシングユニットをさらに具え、
前記第2プロセッサは、前記センシングユニットの装置位置及び方向を決定し、
前記第2プロセッサは、前記装置位置及び方向の個々の位置及び方向信号を前記位置合わせモジュールに供給し、
前記位置合わせモジュールは、前記位置及び方向信号にしたがって前記医療用介在装置の表現を発生することを特徴とする位置合わせシステム。
【請求項20】
請求項1に記載の位置合わせシステムにおいて、前記第1医療位置決めシステムは、
前記身体に結合される複数の送信機と、
前記第1イメージャに結合される第1プロセッサと、
前記第1プロセッサに結合される複数の第1受信機とを具え、
前記第2医療位置決めシステムは、
前記送信機と、
前記第2イメージャ及び前記位置合わせモジュールに結合される第2プロセッサと、
前記第2プロセッサに結合される複数の第2受信機とを具え、
前記第1プロセッサは、前記第1受信機が前記送信機から無線信号を受信する場合、前記第1位置及び方向を決定し、
前記第2プロセッサは、前記第2受信機が前記送信機から無線信号を受信する場合、前記第2位置及び方向を決定することを特徴とする位置合わせシステム。
【請求項21】
請求項20に記載の位置合わせシステムにおいて、前記第1医療位置決めシステム及び前記第2医療位置決めシステムは、前記第1位置及び方向及び前記第2位置及び方向を、各々三角法によって決定することを特徴とする位置合わせシステム。
【請求項22】
第1画像を第2画像と位置合わせする方法において、該方法は、
患者の身体の第1位置及び方向を、第1座標系において、第1医療位置決めシステムによって検出する手順と、
前記第1画像の座標の第1集合を前記第1座標系において決定する手順と、
前記身体の第2位置及び方向を、第2座標系において、第2医療位置決めシステムによって検出する手順と、
前記第2画像の座標の第2集合を前記第2座標系において決定する手順と、
前記座標の第1集合を前記座標の第2集合と位置合わせする手順とを含むことを特徴とする方法。
【請求項23】
請求項22に記載の方法において、前記第1位置及び方向を検出する手順を行った後に、前記第1画像を第1イメージャによって取得する手順をさらに含むことを特徴とする方法。
【請求項24】
請求項23に記載の方法において、前記第1画像を取得する手順を行った後に、前記第1画像を画像データベースに記憶する手順をさらに含むことを特徴とする方法。
【請求項25】
請求項22に記載の方法において、前記第2位置及び方向を検出する手順を行った後に、前記第2画像を第2イメージャによって取得する手順をさらに含むことを特徴とする方法。
【請求項26】
請求項22に記載の方法において、前記第1医療位置決めシステムは、少なくとも1つの身体位置及び方向検出器から受けた位置及び方向信号にしたがって前記第1位置及び方向を検出し、
前記少なくとも1つの身体位置及び方向検出器は、前記身体及び前記第1医療位置決めシステムに結合されることを特徴とする方法。
【請求項27】
請求項22に記載の方法において、前記第2医療位置決めシステムは、少なくとも1つの身体位置及び方向検出器から受けた位置及び方向信号にしたがって前記第1位置及び方向を検出し、
前記少なくとも1つの身体位置及び方向検出器は、前記身体及び前記第2医療位置決めシステムに結合されることを特徴とする方法。
【請求項28】
請求項22に記載の方法において、前記位置合わせする手順は、前記第2位置及び方向及び前記第2位置及び方向にしたがって行われることを特徴とする方法。
【請求項29】
請求項22に記載の方法において、前記第1座標系と前記第2座標系との間のスケールファクタにしたがって、前記第1画像のスケールを前記第2座標系のスケールに変更する手順をさらに含むことを特徴とする方法。
【請求項30】
請求項22に記載の方法において、前記第1医療位置決めシステムは、前記第1位置及び方向を、三角法によって、複数のセンシングユニットから受けた複数の信号にしたがって検出し、
前記センシングユニットは、前記身体及び前記第1医療位置決めシステムに結合されることを特徴とする方法。
【請求項31】
請求項22に記載の方法において、前記第2医療位置決めシステムは、前記第2位置及び方向を、三角法によって、複数のセンシングユニットから受けた複数の信号にしたがって検出し、
前記センシングユニットは、前記身体及び前記第2医療位置決めシステムに結合されることを特徴とする方法。
【請求項32】
請求項22に記載の方法において、前記第1医療位置決めシステムは、前記第1位置及び方向を、複数の送信機から無線式に受けた複数の信号にしたがって検出し、
前記第2医療位置決めシステムは、前記第2位置及び方向を前記信号にしたがって検出し、
前記送信機は前記身体に結合されることを特徴とする方法。
【請求項33】
患者の身体の一部を、複数の治療セッション中、治療装置が前記身体の選択された組織を自動的に医療治療するのに適切な同じ治療位置及び方向において再位置決めするシステムにおいて、該システムは、
位置決めユーザインタフェースと、
前記選択された組織に関係付けられた選択された位置において配置された位置及び方向検出器と、
記憶ユニット、前記位置決めユーザインタフェース、及び、前記位置及び方向検出器に結合される医療位置決めシステムとを具え、前記医療位置決めシステムは、前記選択された組織が前記治療及び方向において配置されている間、前記位置及び方向検出器の初期位置及び方向を検出し、前記医療位置決めシステムは、前記位置決めユーザインタフェースを介して、前記位置及び方向検出器が前記初期位置及び方向において再び配置される場合を示し、これによって、前記選択された組織が前記治療位置及び方向において再び配置されたことを確認することを特徴とするシステム。
【請求項34】
請求項33に記載のシステムにおいて、前記治療装置をさらに具えることを特徴とするシステム。
【請求項35】
請求項33に記載のシステムにおいて、前記初期位置及び方向を記録する記憶ユニットをさらに具えることを特徴とするシステム。
【請求項36】
請求項33に記載のシステムにおいて、前記位置決めユーザインタフェースは、少なくとも1つの表示を発生し、現在検出された位置及び方向が前記初期位置及び方向と実質的に同じであるか否かを決定することを特徴とするシステム。
【請求項37】
請求項36に記載のシステムにおいて、前記少なくとも1つの表示は、前記現在検出された位置及び方向の個々の第1表示と、前記初期位置及び方向の個々の第2表示とを含むことを特徴とするシステム。
【請求項38】
請求項36に記載のシステムにおいて、該システムは、前記記憶ユニット、前記医療位置決めシステム及び前記位置決めユーザインタフェースに結合される比較器をさらに具え、
前記比較器は、前記現在検出された位置及び方向を前記初期位置及び方向と比較し、
前記比較器は、前記比較の結果の個々の信号を前記位置決めユーザインタフェースに供給し、
前記位置決めユーザインタフェースは、前記信号にしたがって前記少なくとも1つの表示を発生することを特徴とするシステム。
【請求項39】
請求項36に記載のシステムにおいて、前記少なくとも1つの表示は、
視覚的、
聴覚的及び
触覚的
から成るリストから選択されることを特徴とするシステム。
【請求項40】
請求項33に記載のシステムにおいて、該システムは、
前記治療装置に結合される移動メカニズムと、
前記移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記移動メカニズムに命令し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように前記治療装置を移動することを特徴とするシステム。
【請求項41】
請求項40に記載のシステムにおいて、該システムは、前記コントローラに結合される治療装置ユーザインタフェースをさらに具え、
前記治療装置ユーザインタフェースは、移動データを前記コントローラに入力するのに用いられ、前記移動データは、前記治療装置が前記選択された組織を医療治療する方向の個々であり、
前記コントローラは、前記移動メカニズムに命令し、前記移動データにしたがって前記移動メカニズムを移動することを特徴とするシステム。
【請求項42】
請求項40に記載のシステムにおいて、該システムは、前記コントローラに結合される治療装置ユーザインタフェースをさらに具え、
前記治療装置ユーザインタフェースは、座標の集合を前記コントローラに入力するのに用いられ、前記座標の集合は、前記選択された組織の境界の個々であり、
前記コントローラは、前記移動メカニズムに命令し、前記座標の集合にしたがって前記移動メカニズムを移動することを特徴とするシステム。
【請求項43】
請求項33に記載のシステムにおいて、前記座標の集合は、
離散的及び
容量的
から成るリストから選択されることを特徴とするシステム。
【請求項44】
請求項33に記載のシステムにおいて、該システムは、
前記患者が横たわる手術台に結合される移動メカニズムと、
前記移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記移動メカニズムに命令し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように前記手術台を移動することを特徴とするシステム。
【請求項45】
請求項33に記載のシステムにおいて、該システムは、
前記患者が横たわる手術台と前記治療装置とに結合される少なくとも1つの移動メカニズムと、
前記少なくとも1つの移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記少なくとも1つの移動メカニズムに命令し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように前記治療装置及び前記手術台を移動することを特徴とするシステム。
【請求項46】
請求項33に記載のシステムにおいて、前記治療装置は、
線形加速器、
局所ロボット外科装置及び
リモートテレビ外科装置
から成るリストから選択されることを特徴とするシステム。
【請求項47】
請求項33に記載のシステムにおいて、前記選択された組織は、
腫瘍性及び
非腫瘍性
から成るリストから選択されることを特徴とするシステム。
【請求項48】
請求項33に記載のシステムにおいて、前記位置及び方向検出器を前記選択された位置に配置する身体侵入装置をさらに具えることを特徴とするシステム。
【請求項49】
多セッション自動治療手順中に患者の身体の一部を再位置決めする方法において、
位置及び方向検出器の初期位置及び方向を検出する手順であって、前記初期位置及び方向は、前記身体の選択された組織を自動的に治療するのに適切な治療位置及び方向に関係付けられる、手順と、
前記初期位置及び方向を記録する手順と、
各々の周期的な医療治療の始めにおいて、前記位置及び方向検出器の現在位置及び方向を検出する手順と、
前記現在位置及び方向が前記記録された位置及び方向と実質的に同じであるか否かを示す手順とを含むことを特徴とする方法。
【請求項50】
請求項49に記載の方法において、前記位置及び方向検出器を前記記録された初期位置及び方向において保持しながら、前記選択された組織を医療治療する手順をさらに含むことを特徴とする方法。
【請求項51】
請求項49に記載の方法において、治療装置に命令し、前記現在位置及び方向が前記記録された初期位置及び方向と実質的に同じ場合、前記選択された組織を自動的に治療するのに適切な方向に移動させる手順をさらに含むことを特徴とする方法。
【請求項52】
請求項49に記載の方法において、前記位置及び方向検出器を、前記選択された組織に関係付けられた選択された位置に固定する予備手順をさらに含むことを特徴とする方法。
【請求項53】
請求項49に記載の方法において、前記示す手順は、前記現在位置及び方向を前記記録された初期位置及び方向と比較するサブ手順を含むことを特徴とする方法。
【請求項54】
請求項49に記載の方法において、前記選択された組織に対する治療装置の運動を、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように制御する手順をさらに含むことを特徴とする方法。
【請求項55】
患者の体内の選択された組織を医療治療するシステムにおいて、
前記位置及び方向検出器が前記第1医療位置決めシステムに結合され、前記位置及び方向検出器が前記選択された組織に関係付けられた選択された位置に配置される場合、第1座標系における位置及び方向検出器の第1位置及び方向を検出する第1医療位置決めシステムと、
前記位置及び方向検出器が前記第2医療位置決めシステムに結合される場合、第2座標系における前記位置及び方向検出器の第2位置及び方向を検出する第2医療位置決めシステムと、
前記第2医療位置決めシステム及び治療装置に結合され、前記第1座標家における前記選択された組織の座標の集合を前記第2座標系に位置合わせする位置合わせモジュールとを具え、前記座標の集合は前記第1位置及び方向に関係付けられ、前記治療装置は、前記位置合わせされた座標の集合にしたがって、前記選択された組織を医療治療することを特徴とするシステム。
【請求項56】
請求項55に記載のシステムにおいて、
前記第1医療位置決めシステムに結合されるイメージャと、
前記第1医療位置決めシステム及び前記イメージャに結合される記憶ユニットと、
前記イメージャに結合されるユーザインタフェースとをさらに具え、前記ユーザインタフェースは、前記座標の集合を前記記憶ユニットに記憶するのに使用され、
前記イメージャは、前記身体のセクションから少なくとも1つの画像を取得し、前記少なくとも1つの画像は、前記選択された組織の画像を含み、
前記ユーザインタフェースは、前記少なくとも1つの画像を表示することを特徴とするシステム。
【請求項57】
請求項55に記載のシステムにおいて、前記イメージャ及び前記治療装置をさらに具えることを特徴とするシステム。
【請求項58】
請求項55に記載のシステムにおいて、前記イメージャは、
蛍光透視法と、
超音波と、
サーモグラフィと、
核磁気共鳴と、
光学イメージングと、
から成るリストから選択されることを特徴とするシステム。
【請求項59】
請求項55に記載のシステムにおいて、
前記治療装置に結合される移動メカニズムと、
前記位置合わせモジュール、前記治療装置及び前記移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記位置合わせされた座標の集合の個々の信号を前記位置合わせモジュールから受け、
前記コントローラは、前記移動メカニズムに命令し、前記医療装置を前記選択された組織に関して移動し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するようにすることを特徴とするシステム。
【請求項60】
請求項55に記載のシステムにおいて、前記治療装置は、
線形加速器、
局所ロボット外科装置及び
リモートテレビ外科装置
から成るリストから選択されることを特徴とするシステム。
【請求項61】
患者の身体の中の選択された組織を医療治療する方法において、
第1医療位置決めシステムによって、第1座標系における検出器の第1位置及び方向を検出する手順であって、前記検出器は、前記選択された組織に関係付けられた選択された位置において配置される、手順と、
前記第1座標系における前記選択された組織の座標の集合を前記第1位置及び方向と関係付ける手順と、
第2医療位置決めシステムによって、第2座標系における前記検出器の第2位置及び方向を検出する手順と、
前記第2位置及び方向にしたがって、前記関係付けられた座標の集合を前記第2座標系に位置合わせする手順とを含むことを特徴とする方法。
【請求項62】
請求項61に記載の方法において、前記位置合わせされた座標の集合にしたがって、前記選択された組織を医療治療する手順をさらに含むことを特徴とする方法。
【請求項63】
請求項61に記載の方法において、前記検出器を前記選択された位置において固定する予備手順をさらに含むことを特徴とする方法。
【請求項64】
請求項61に記載の方法において、前記固定する手順を行った後、前記身体のセクションの少なくとも1つの画像を取得する手順をさらに含み、前記少なくとも1つの画像は前記選択された組織の画像を含むことを特徴とする方法。
【請求項65】
請求項64に記載の方法において、前記少なくとも1つの画像を表示する手順をさらに含むことを特徴とする方法。
【請求項66】
請求項61に記載の方法において、前記位置合わせする手順を行った後、前記位置合わせされた座標の集合を治療装置に供給する手順をさらに含むことを特徴とする方法。
【請求項67】
請求項61に記載の方法において、前記関係付ける手順を行った後、前記関係付けられた座標の集合を記憶ユニットに記憶する手順をさらに含むことを特徴とする方法。
【請求項68】
請求項61に記載の方法において、前記位置合わせする手順は、前記関係付けられた座標の集合を前記第1座標系から前記第2座標系へ変換する手順を含むことを特徴とする方法。
【請求項69】
請求項68に記載の方法において、前記変換する手順は、
前記関係付けられた座標の集合を、前記第1座標系及び前記第2座標系に関係付けられたスケールファクタにしたがって変更する手順と、
前記関係付けられた座標の集合を、前記第1座標系及び前記第2座標系に関係付けられた変換行列にしたがって変更する手順と
から成るリストから選択されることを特徴とする方法。
【請求項70】
請求項61に記載の方法において、前記医療治療の手順の前に、前記選択された組織に関する治療装置の移動を制御し、前記治療装置が前記選択された組織を自動的に医療治療することを可能にする手順をさらに含むことを特徴とする方法。
【請求項71】
イメージャを、移動メカニズムによって、患者の身体のセクションに関して所望の方向に調節し、前記セクションの視覚的表現を取得するシステムであって、前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含み、前記医療用介在装置は前記セクションに挿入される、システムにおいて、該システムは、
医療位置決めシステムと、
前記医療位置決めシステム及び前記移動メカニズムに結合されるプロセッサと、
前記医療用介在装置に前記興味ある部分において結合され、前記医療位置決めシステムに結合される装置位置及び方向検出器とを具え、
前記医療位置決めシステムは、前記装置位置及び方向検出器の装置位置及び方向を検出し、前記医療位置決めシステムは、前記装置位置及び方向を前記プロセッサに供給し、
前記プロセッサは、前記装置位置及び方向にしたがって前記所望の方向を決定し、
前記プロセッサは、前記移動メカニズムに命令し、前記イメージャを前記所望の方向に移動することを特徴とするシステム。
【請求項72】
請求項71に記載のシステムにおいて、前記移動メカニズムをさらに具えることを特徴とするシステム。
【請求項73】
請求項72に記載のシステムにおいて、前記イメージャをさらに具えることを特徴とするシステム。
【請求項74】
請求項71に記載のシステムにおいて、前記イメージャ及び前記医療位置決めシステムに結合されるイメージャ位置及び方向検出器をさらに具え、
前記医療位置決めシステムは、前記イメージャ位置及び方向検出器のイメージャ位置及び方向を検出し、前記医療位置決めシステムは、前記イメージャ位置及び方向を前記プロセッサに供給し、
前記プロセッサは、前記装置位置及び方向及び前記イメージャ位置及び方向にしたがって前記所望の方向を決定することを特徴とするシステム。
【請求項75】
請求項71に記載のシステムにおいて、前記イメージャは、
前記身体の一方の側に配置される放射発生器と、
前記身体の他方の側に配置される放射検出器とを具え、前記放射検出器は、前記放射発生器によって発生される放射を検出し、前記興味ある部分は、前記放射発生器と前記放射検出器との間に配置され、
該システムは、前記イメージャに結合されるディスプレイをさらに具え、
前記放射検出器は、前記イメージャが前記方向において配置される場合、前記視覚的表現を検出し、
前記ディスプレイは、前記視覚的表現を表示することを特徴とするシステム。
【請求項76】
請求項71に記載のシステムにおいて、前記移動メカニズムは、少なくとも1自由度を有することを特徴とするシステム。
【請求項77】
請求項71に記載のシステムにおいて、前記イメージャは、
核、
超音波及び
電磁気
から成るリストから選択される放射領域において動作することを特徴とするシステム。
【請求項78】
請求項71に記載のシステムにおいて、前記医療用介在装置は、
カテーテルと、
薬剤分配ユニットと、
組織切断ユニットと、
から成るリストから選択されることを特徴とするシステム。
【請求項79】
イメージャを所望の方向に調節し、患者の身体のセクションの視覚的表現を取得する方法において、前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含み、該方法は、
前記興味ある部分において前記医療用介在装置に結合される位置及び方向検出器の装置位置及び方向を検出する手順と、
前記イメージャが前記視覚的表現を取得できるように、前記装置位置及び方向にしたがって前記所望の方向を決定する手順と、
前記移動メカニズムに命令し、前記イメージャを前記所望の方向に移動する手順とを含むことを特徴とする方法。
【請求項80】
請求項79に記載の方法において、前記医療用介在装置を前記身体に挿入する予備手順をさらに含むことを特徴とする方法。
【請求項81】
請求項79に記載の方法において、前記イメージャに結合されるイメージャ位置及び方向検出器のイメージャ位置及び方向を検出する手順と、
前記イメージャの位置及び方向を前記イメージャ位置及び方向から決定する手順とをさらに含むことを特徴とする方法。
【請求項82】
請求項79に記載の方法において、前記イメージャ位置及び方向を前記イメージャから取り出す手順をさらに含むことを特徴とする方法。
【請求項83】
請求項79に記載の方法において、前記視覚的表現を前記イメージャによって取得する手順をさらに含むことを特徴とする方法。
【請求項84】
請求項83に記載の方法において、前記視覚的表現を表示する手順をさらに含むことを特徴とする方法。
【請求項85】
請求項79に記載の方法において、前記移動メカニズムは少なくとも1自由度を有することを特徴とする方法。
【請求項86】
請求項79に記載の方法において、イメージャは、前記視覚的表現を、前記セクションに照射することによって取得することを特徴とする方法。
【請求項87】
請求項1〜86のいずれかに実質的に記載されているか、いずれかの図面に実質的に図示された、請求項1〜21、33〜48、55〜60、及び71〜78のいずれかに記載のシステム。
【請求項88】
請求項1〜86のいずれかに実質的に記載されているか、いずれかの図面に実質的に図示された、請求項22〜32、49〜54、及び61〜71のいずれかに記載の方法。
【請求項1】
第1画像を第2画像と位置合わせするシステムにおいて、
患者の身体の第1位置及び方向を検出する第1医療位置決めシステムであって、前記第1医療位置決めシステムは第1イメージャに関係付けられ結合され、前記第1イメージャは、少なくとも1つの画像を前記身体から取得し、前記第1イメージャは、前記少なくとも1つの画像に前記第1位置及び方向を関係付けることによって前記第1画像を発生する、第1医療位置決めシステムと、
前記身体の第2位置及び方向を検出する第2医療位置決めシステムであって、前記第2医療位置決めシステムは第2イメージャに関係付けられ結合され、前記第2イメージャは、前記第2画像を取得し、前記第2画像を前記第2位置及び方向に関係付ける、第2医療位置決めシステムと、
前記第2イメージャ及び前記第2医療位置決めシステムに結合され、前記第1位置及び方向と前記第2位置及び方向とにしたがって、前記第1画像を前記第2画像と位置合わせする位置合わせモジュールとを具えることを特徴とする位置合わせシステム。
【請求項2】
請求項1に記載の位置合わせシステムにおいて、前記第1イメージャ及び前記位置合わせモジュールに結合された画像データベースをさらに具え、前記第1イメージャは前記第1画像を前記画像データベースに記憶し、
前記位置合わせモジュールは、前記第1画像を前記画像データベースから取り出すことを特徴とする位置合わせシステム。
【請求項3】
請求項1に記載の位置合わせシステムにおいて、前記第1医療位置決めシステムは、第1座標系に関係付けられ、
前記第2医療位置決めシステムは、第2座標系に関係付けられる位置合わせシステム。
【請求項4】
請求項1に記載の位置合わせシステムにおいて、前記身体に結合される身体位置及び方向検出器をさらに具え、前記第1医療位置決めシステムは、前記身体位置及び方向検出器が前記第1医療位置決めシステムに結合される場合、前記第1位置及び方向を検出し、
前記第2医療位置決めシステムは、前記身体位置及び方向検出器が前記第2医療位置決めシステムに結合される場合、前記第2位置及び方向を検出することを特徴とする位置合わせシステム。
【請求項5】
請求項1に記載の位置合わせシステムにおいて、医療用介在装置及び前記第2医療位置決めシステムに結合される装置位置及び方向検出器をさらに具え、前記第2医療位置決めシステムは、前記医療用介在装置の装置位置及び方向を検出し、
前記第2医療位置決めシステムは、前記装置位置及び方向の個々の位置及び方向信号を前記位置合わせモジュールに供給し、
前記位置合わせモジュールは、前記位置及び方向信号にしたがって、前記医療用介在装置の表現を発生することを特徴とする位置合わせシステム。
【請求項6】
請求項5に記載の位置合わせシステムにおいて、前記医療用介在装置は、
カテーテルと、
薬剤分配ユニットと、
組織切断ユニットと、
から成るリストから選択されることを特徴とする位置合わせシステム。
【請求項7】
請求項1に記載の位置合わせシステムにおいて、前記第1イメージャ及び前記第2イメージャをさらに具えることを特徴とする位置合わせシステム。
【請求項8】
請求項1に記載の位置合わせシステムにおいて、前記第1イメージャ及び前記第2イメージャの各々は、
蛍光透視法と、
超音波と、
サーモグラフィと、
核磁気共鳴と、
光学イメージングと、
から成るリストから選択されることを特徴とする位置合わせシステム。
【請求項9】
請求項1に記載の位置合わせシステムにおいて、前記位置合わせモジュールは、前記第1画像を前記第2画像上に重ねることを特徴とする位置合わせシステム。
【請求項10】
請求項1に記載の位置合わせシステムにおいて、前記位置合わせモジュールに結合され、前記第1画像及び前記第2画像の少なくとも1つを表示するディスプレイをさらに具えることを特徴とする位置合わせシステム。
【請求項11】
請求項1に記載の位置合わせシステムにおいて、
前記第1イメージャ及び前記位置合わせモジュールに結合されるプロセッサと、
前記プロセッサに結合される第1器官タイミングモニタであって、第1パルスセンサが、検査される器官及び及び前記第1器官タイミングモニタに結合される場合、前記第1器官タイミングモニタは前記検査される器官のタイミング信号を検出する、第1器官タイミングモニタと、
前記位置合わせモジュールに結合される第2器官タイミングモニタであって、第2パルスセンサが、前記検査される器官及び前記第2器官タイミングモニタに結合される場合、前記第2器官タイミングモニタは前記タイミング信号を検出する、第2器官タイミングモニタとをさらに具え、
前記プロセッサは、前記少なくとも1つの画像を、前記第1位置及び方向の各々と、前記タイミング信号の個々の時間ポイントとに関係付けることによって再生し、
前記位置合わせモジュールは、前記個々の第1位置及び方向と、前記第2位置及び方向の各々と、前記個々の時間ポイントとにしたがって、前記第1画像を前記第2画像に位置合わせすることを特徴とする位置合わせシステム。
【請求項12】
請求項11に記載の位置合わせシステムにおいて、前記プロセッサ及び前記位置合わせモジュールに結合される画像データベースをさらに具え、前記プロセッサは、前記第1画像を前記画像データベースに記憶し、
前記位置合わせモジュールは、前記第1画像を前記画像データベースから取り出すことを特徴とする位置合わせシステム。
【請求項13】
請求項1に記載の位置合わせシステムにおいて、前記身体に結合される少なくとも2個のボディ位置及び方向検出器をさらに具え、前記第1医療位置決めシステムは、前記少なくとも2個のボディ位置及び方向検出器が前記第1医療位置決めシステムに結合される場合、前記第1位置及び方向を検出し、
前記第2医療位置決めシステムは、前記少なくとも2個のボディ位置及び方向検出器が前記第2医療位置決めシステムに結合される場合、前記第2位置及び方向を検出し、
前記位置合わせモジュールは、前記少なくとも2個のボディ位置及び方向検出器間の距離にしたがって、前記第1画像及び第2画像のスケールを調節することを特徴とする位置合わせシステム。
【請求項14】
請求項1に記載の位置合わせシステムにおいて、前記第1医療位置決めシステムは、
前記身体に結合される複数のセンシングユニットと、
前記センシングユニットに結合される第1トランシーバと、
前記第1トランシーバ及び前記第1イメージャに結合され、前記センシングユニットが前記第1トランシーバに結合される場合、前記第1トランシーバから受ける第1信号にしたがって、前記第1位置及び方向を決定する第1プロセッサとを具え、
前記第2医療位置決めシステムは、
前記センシングユニットと、
前記センシングユニットに結合される第2トランシーバと、
前記位置合わせモジュール及び前記第2イメージャに結合され、前記センシングユニットは、前記センシングユニットが前記第2トランシーバに結合される場合、前記第2トランシーバから受けた第2信号にしたがって前記第2位置及び方向を決定することを特徴とする位置合わせシステム。
【請求項15】
請求項14に記載の位置合わせシステムにおいて、前記センシングユニットの各々は、位置検出器及び方向検出器を具えることを特徴とする位置合わせシステム。
【請求項16】
請求項15に記載の位置合わせシステムにおいて、前記位置検出器は、
電磁コイル及び
ソナーセンサ
から成るリストから選択されることを特徴とする位置合わせシステム。
【請求項17】
請求項15に記載の位置合わせシステムにおいて、前記方向検出器はジャイロスコープであることを特徴とする位置合わせシステム。
【請求項18】
請求項14に記載の位置合わせシステムにおいて、
前記第1トランシーバ及び前記第1イメージャに結合される第1センシングユニットであって、前記第1プロセッサは、前記第1トランシーバから受けた第1信号にしたがって前記第1イメージャの第1イメージャ位置及び方向を決定する、第1センシングユニットと、
前記第2トランシーバ及び前記第2イメージャに結合される第2センシングユニットであって、前記第2プロセッサは、前記第2トランシーバから受けた第2信号にしたがって前記第2イメージャの第2イメージャ位置及び方向を決定する、第2センシングユニットとをさらに具えることを特徴とする位置合わせシステム。
【請求項19】
請求項14に記載の位置合わせシステムにおいて、医療用介在装置及び前記第2トランシーバに結合されるセンシングユニットをさらに具え、
前記第2プロセッサは、前記センシングユニットの装置位置及び方向を決定し、
前記第2プロセッサは、前記装置位置及び方向の個々の位置及び方向信号を前記位置合わせモジュールに供給し、
前記位置合わせモジュールは、前記位置及び方向信号にしたがって前記医療用介在装置の表現を発生することを特徴とする位置合わせシステム。
【請求項20】
請求項1に記載の位置合わせシステムにおいて、前記第1医療位置決めシステムは、
前記身体に結合される複数の送信機と、
前記第1イメージャに結合される第1プロセッサと、
前記第1プロセッサに結合される複数の第1受信機とを具え、
前記第2医療位置決めシステムは、
前記送信機と、
前記第2イメージャ及び前記位置合わせモジュールに結合される第2プロセッサと、
前記第2プロセッサに結合される複数の第2受信機とを具え、
前記第1プロセッサは、前記第1受信機が前記送信機から無線信号を受信する場合、前記第1位置及び方向を決定し、
前記第2プロセッサは、前記第2受信機が前記送信機から無線信号を受信する場合、前記第2位置及び方向を決定することを特徴とする位置合わせシステム。
【請求項21】
請求項20に記載の位置合わせシステムにおいて、前記第1医療位置決めシステム及び前記第2医療位置決めシステムは、前記第1位置及び方向及び前記第2位置及び方向を、各々三角法によって決定することを特徴とする位置合わせシステム。
【請求項22】
第1画像を第2画像と位置合わせする方法において、該方法は、
患者の身体の第1位置及び方向を、第1座標系において、第1医療位置決めシステムによって検出する手順と、
前記第1画像の座標の第1集合を前記第1座標系において決定する手順と、
前記身体の第2位置及び方向を、第2座標系において、第2医療位置決めシステムによって検出する手順と、
前記第2画像の座標の第2集合を前記第2座標系において決定する手順と、
前記座標の第1集合を前記座標の第2集合と位置合わせする手順とを含むことを特徴とする方法。
【請求項23】
請求項22に記載の方法において、前記第1位置及び方向を検出する手順を行った後に、前記第1画像を第1イメージャによって取得する手順をさらに含むことを特徴とする方法。
【請求項24】
請求項23に記載の方法において、前記第1画像を取得する手順を行った後に、前記第1画像を画像データベースに記憶する手順をさらに含むことを特徴とする方法。
【請求項25】
請求項22に記載の方法において、前記第2位置及び方向を検出する手順を行った後に、前記第2画像を第2イメージャによって取得する手順をさらに含むことを特徴とする方法。
【請求項26】
請求項22に記載の方法において、前記第1医療位置決めシステムは、少なくとも1つの身体位置及び方向検出器から受けた位置及び方向信号にしたがって前記第1位置及び方向を検出し、
前記少なくとも1つの身体位置及び方向検出器は、前記身体及び前記第1医療位置決めシステムに結合されることを特徴とする方法。
【請求項27】
請求項22に記載の方法において、前記第2医療位置決めシステムは、少なくとも1つの身体位置及び方向検出器から受けた位置及び方向信号にしたがって前記第1位置及び方向を検出し、
前記少なくとも1つの身体位置及び方向検出器は、前記身体及び前記第2医療位置決めシステムに結合されることを特徴とする方法。
【請求項28】
請求項22に記載の方法において、前記位置合わせする手順は、前記第2位置及び方向及び前記第2位置及び方向にしたがって行われることを特徴とする方法。
【請求項29】
請求項22に記載の方法において、前記第1座標系と前記第2座標系との間のスケールファクタにしたがって、前記第1画像のスケールを前記第2座標系のスケールに変更する手順をさらに含むことを特徴とする方法。
【請求項30】
請求項22に記載の方法において、前記第1医療位置決めシステムは、前記第1位置及び方向を、三角法によって、複数のセンシングユニットから受けた複数の信号にしたがって検出し、
前記センシングユニットは、前記身体及び前記第1医療位置決めシステムに結合されることを特徴とする方法。
【請求項31】
請求項22に記載の方法において、前記第2医療位置決めシステムは、前記第2位置及び方向を、三角法によって、複数のセンシングユニットから受けた複数の信号にしたがって検出し、
前記センシングユニットは、前記身体及び前記第2医療位置決めシステムに結合されることを特徴とする方法。
【請求項32】
請求項22に記載の方法において、前記第1医療位置決めシステムは、前記第1位置及び方向を、複数の送信機から無線式に受けた複数の信号にしたがって検出し、
前記第2医療位置決めシステムは、前記第2位置及び方向を前記信号にしたがって検出し、
前記送信機は前記身体に結合されることを特徴とする方法。
【請求項33】
患者の身体の一部を、複数の治療セッション中、治療装置が前記身体の選択された組織を自動的に医療治療するのに適切な同じ治療位置及び方向において再位置決めするシステムにおいて、該システムは、
位置決めユーザインタフェースと、
前記選択された組織に関係付けられた選択された位置において配置された位置及び方向検出器と、
記憶ユニット、前記位置決めユーザインタフェース、及び、前記位置及び方向検出器に結合される医療位置決めシステムとを具え、前記医療位置決めシステムは、前記選択された組織が前記治療及び方向において配置されている間、前記位置及び方向検出器の初期位置及び方向を検出し、前記医療位置決めシステムは、前記位置決めユーザインタフェースを介して、前記位置及び方向検出器が前記初期位置及び方向において再び配置される場合を示し、これによって、前記選択された組織が前記治療位置及び方向において再び配置されたことを確認することを特徴とするシステム。
【請求項34】
請求項33に記載のシステムにおいて、前記治療装置をさらに具えることを特徴とするシステム。
【請求項35】
請求項33に記載のシステムにおいて、前記初期位置及び方向を記録する記憶ユニットをさらに具えることを特徴とするシステム。
【請求項36】
請求項33に記載のシステムにおいて、前記位置決めユーザインタフェースは、少なくとも1つの表示を発生し、現在検出された位置及び方向が前記初期位置及び方向と実質的に同じであるか否かを決定することを特徴とするシステム。
【請求項37】
請求項36に記載のシステムにおいて、前記少なくとも1つの表示は、前記現在検出された位置及び方向の個々の第1表示と、前記初期位置及び方向の個々の第2表示とを含むことを特徴とするシステム。
【請求項38】
請求項36に記載のシステムにおいて、該システムは、前記記憶ユニット、前記医療位置決めシステム及び前記位置決めユーザインタフェースに結合される比較器をさらに具え、
前記比較器は、前記現在検出された位置及び方向を前記初期位置及び方向と比較し、
前記比較器は、前記比較の結果の個々の信号を前記位置決めユーザインタフェースに供給し、
前記位置決めユーザインタフェースは、前記信号にしたがって前記少なくとも1つの表示を発生することを特徴とするシステム。
【請求項39】
請求項36に記載のシステムにおいて、前記少なくとも1つの表示は、
視覚的、
聴覚的及び
触覚的
から成るリストから選択されることを特徴とするシステム。
【請求項40】
請求項33に記載のシステムにおいて、該システムは、
前記治療装置に結合される移動メカニズムと、
前記移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記移動メカニズムに命令し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように前記治療装置を移動することを特徴とするシステム。
【請求項41】
請求項40に記載のシステムにおいて、該システムは、前記コントローラに結合される治療装置ユーザインタフェースをさらに具え、
前記治療装置ユーザインタフェースは、移動データを前記コントローラに入力するのに用いられ、前記移動データは、前記治療装置が前記選択された組織を医療治療する方向の個々であり、
前記コントローラは、前記移動メカニズムに命令し、前記移動データにしたがって前記移動メカニズムを移動することを特徴とするシステム。
【請求項42】
請求項40に記載のシステムにおいて、該システムは、前記コントローラに結合される治療装置ユーザインタフェースをさらに具え、
前記治療装置ユーザインタフェースは、座標の集合を前記コントローラに入力するのに用いられ、前記座標の集合は、前記選択された組織の境界の個々であり、
前記コントローラは、前記移動メカニズムに命令し、前記座標の集合にしたがって前記移動メカニズムを移動することを特徴とするシステム。
【請求項43】
請求項33に記載のシステムにおいて、前記座標の集合は、
離散的及び
容量的
から成るリストから選択されることを特徴とするシステム。
【請求項44】
請求項33に記載のシステムにおいて、該システムは、
前記患者が横たわる手術台に結合される移動メカニズムと、
前記移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記移動メカニズムに命令し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように前記手術台を移動することを特徴とするシステム。
【請求項45】
請求項33に記載のシステムにおいて、該システムは、
前記患者が横たわる手術台と前記治療装置とに結合される少なくとも1つの移動メカニズムと、
前記少なくとも1つの移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記少なくとも1つの移動メカニズムに命令し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように前記治療装置及び前記手術台を移動することを特徴とするシステム。
【請求項46】
請求項33に記載のシステムにおいて、前記治療装置は、
線形加速器、
局所ロボット外科装置及び
リモートテレビ外科装置
から成るリストから選択されることを特徴とするシステム。
【請求項47】
請求項33に記載のシステムにおいて、前記選択された組織は、
腫瘍性及び
非腫瘍性
から成るリストから選択されることを特徴とするシステム。
【請求項48】
請求項33に記載のシステムにおいて、前記位置及び方向検出器を前記選択された位置に配置する身体侵入装置をさらに具えることを特徴とするシステム。
【請求項49】
多セッション自動治療手順中に患者の身体の一部を再位置決めする方法において、
位置及び方向検出器の初期位置及び方向を検出する手順であって、前記初期位置及び方向は、前記身体の選択された組織を自動的に治療するのに適切な治療位置及び方向に関係付けられる、手順と、
前記初期位置及び方向を記録する手順と、
各々の周期的な医療治療の始めにおいて、前記位置及び方向検出器の現在位置及び方向を検出する手順と、
前記現在位置及び方向が前記記録された位置及び方向と実質的に同じであるか否かを示す手順とを含むことを特徴とする方法。
【請求項50】
請求項49に記載の方法において、前記位置及び方向検出器を前記記録された初期位置及び方向において保持しながら、前記選択された組織を医療治療する手順をさらに含むことを特徴とする方法。
【請求項51】
請求項49に記載の方法において、治療装置に命令し、前記現在位置及び方向が前記記録された初期位置及び方向と実質的に同じ場合、前記選択された組織を自動的に治療するのに適切な方向に移動させる手順をさらに含むことを特徴とする方法。
【請求項52】
請求項49に記載の方法において、前記位置及び方向検出器を、前記選択された組織に関係付けられた選択された位置に固定する予備手順をさらに含むことを特徴とする方法。
【請求項53】
請求項49に記載の方法において、前記示す手順は、前記現在位置及び方向を前記記録された初期位置及び方向と比較するサブ手順を含むことを特徴とする方法。
【請求項54】
請求項49に記載の方法において、前記選択された組織に対する治療装置の運動を、前記治療装置が前記選択された組織の少なくとも一部を医療治療するように制御する手順をさらに含むことを特徴とする方法。
【請求項55】
患者の体内の選択された組織を医療治療するシステムにおいて、
前記位置及び方向検出器が前記第1医療位置決めシステムに結合され、前記位置及び方向検出器が前記選択された組織に関係付けられた選択された位置に配置される場合、第1座標系における位置及び方向検出器の第1位置及び方向を検出する第1医療位置決めシステムと、
前記位置及び方向検出器が前記第2医療位置決めシステムに結合される場合、第2座標系における前記位置及び方向検出器の第2位置及び方向を検出する第2医療位置決めシステムと、
前記第2医療位置決めシステム及び治療装置に結合され、前記第1座標家における前記選択された組織の座標の集合を前記第2座標系に位置合わせする位置合わせモジュールとを具え、前記座標の集合は前記第1位置及び方向に関係付けられ、前記治療装置は、前記位置合わせされた座標の集合にしたがって、前記選択された組織を医療治療することを特徴とするシステム。
【請求項56】
請求項55に記載のシステムにおいて、
前記第1医療位置決めシステムに結合されるイメージャと、
前記第1医療位置決めシステム及び前記イメージャに結合される記憶ユニットと、
前記イメージャに結合されるユーザインタフェースとをさらに具え、前記ユーザインタフェースは、前記座標の集合を前記記憶ユニットに記憶するのに使用され、
前記イメージャは、前記身体のセクションから少なくとも1つの画像を取得し、前記少なくとも1つの画像は、前記選択された組織の画像を含み、
前記ユーザインタフェースは、前記少なくとも1つの画像を表示することを特徴とするシステム。
【請求項57】
請求項55に記載のシステムにおいて、前記イメージャ及び前記治療装置をさらに具えることを特徴とするシステム。
【請求項58】
請求項55に記載のシステムにおいて、前記イメージャは、
蛍光透視法と、
超音波と、
サーモグラフィと、
核磁気共鳴と、
光学イメージングと、
から成るリストから選択されることを特徴とするシステム。
【請求項59】
請求項55に記載のシステムにおいて、
前記治療装置に結合される移動メカニズムと、
前記位置合わせモジュール、前記治療装置及び前記移動メカニズムに結合されるコントローラとをさらに具え、
前記コントローラは、前記位置合わせされた座標の集合の個々の信号を前記位置合わせモジュールから受け、
前記コントローラは、前記移動メカニズムに命令し、前記医療装置を前記選択された組織に関して移動し、前記治療装置が前記選択された組織の少なくとも一部を医療治療するようにすることを特徴とするシステム。
【請求項60】
請求項55に記載のシステムにおいて、前記治療装置は、
線形加速器、
局所ロボット外科装置及び
リモートテレビ外科装置
から成るリストから選択されることを特徴とするシステム。
【請求項61】
患者の身体の中の選択された組織を医療治療する方法において、
第1医療位置決めシステムによって、第1座標系における検出器の第1位置及び方向を検出する手順であって、前記検出器は、前記選択された組織に関係付けられた選択された位置において配置される、手順と、
前記第1座標系における前記選択された組織の座標の集合を前記第1位置及び方向と関係付ける手順と、
第2医療位置決めシステムによって、第2座標系における前記検出器の第2位置及び方向を検出する手順と、
前記第2位置及び方向にしたがって、前記関係付けられた座標の集合を前記第2座標系に位置合わせする手順とを含むことを特徴とする方法。
【請求項62】
請求項61に記載の方法において、前記位置合わせされた座標の集合にしたがって、前記選択された組織を医療治療する手順をさらに含むことを特徴とする方法。
【請求項63】
請求項61に記載の方法において、前記検出器を前記選択された位置において固定する予備手順をさらに含むことを特徴とする方法。
【請求項64】
請求項61に記載の方法において、前記固定する手順を行った後、前記身体のセクションの少なくとも1つの画像を取得する手順をさらに含み、前記少なくとも1つの画像は前記選択された組織の画像を含むことを特徴とする方法。
【請求項65】
請求項64に記載の方法において、前記少なくとも1つの画像を表示する手順をさらに含むことを特徴とする方法。
【請求項66】
請求項61に記載の方法において、前記位置合わせする手順を行った後、前記位置合わせされた座標の集合を治療装置に供給する手順をさらに含むことを特徴とする方法。
【請求項67】
請求項61に記載の方法において、前記関係付ける手順を行った後、前記関係付けられた座標の集合を記憶ユニットに記憶する手順をさらに含むことを特徴とする方法。
【請求項68】
請求項61に記載の方法において、前記位置合わせする手順は、前記関係付けられた座標の集合を前記第1座標系から前記第2座標系へ変換する手順を含むことを特徴とする方法。
【請求項69】
請求項68に記載の方法において、前記変換する手順は、
前記関係付けられた座標の集合を、前記第1座標系及び前記第2座標系に関係付けられたスケールファクタにしたがって変更する手順と、
前記関係付けられた座標の集合を、前記第1座標系及び前記第2座標系に関係付けられた変換行列にしたがって変更する手順と
から成るリストから選択されることを特徴とする方法。
【請求項70】
請求項61に記載の方法において、前記医療治療の手順の前に、前記選択された組織に関する治療装置の移動を制御し、前記治療装置が前記選択された組織を自動的に医療治療することを可能にする手順をさらに含むことを特徴とする方法。
【請求項71】
イメージャを、移動メカニズムによって、患者の身体のセクションに関して所望の方向に調節し、前記セクションの視覚的表現を取得するシステムであって、前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含み、前記医療用介在装置は前記セクションに挿入される、システムにおいて、該システムは、
医療位置決めシステムと、
前記医療位置決めシステム及び前記移動メカニズムに結合されるプロセッサと、
前記医療用介在装置に前記興味ある部分において結合され、前記医療位置決めシステムに結合される装置位置及び方向検出器とを具え、
前記医療位置決めシステムは、前記装置位置及び方向検出器の装置位置及び方向を検出し、前記医療位置決めシステムは、前記装置位置及び方向を前記プロセッサに供給し、
前記プロセッサは、前記装置位置及び方向にしたがって前記所望の方向を決定し、
前記プロセッサは、前記移動メカニズムに命令し、前記イメージャを前記所望の方向に移動することを特徴とするシステム。
【請求項72】
請求項71に記載のシステムにおいて、前記移動メカニズムをさらに具えることを特徴とするシステム。
【請求項73】
請求項72に記載のシステムにおいて、前記イメージャをさらに具えることを特徴とするシステム。
【請求項74】
請求項71に記載のシステムにおいて、前記イメージャ及び前記医療位置決めシステムに結合されるイメージャ位置及び方向検出器をさらに具え、
前記医療位置決めシステムは、前記イメージャ位置及び方向検出器のイメージャ位置及び方向を検出し、前記医療位置決めシステムは、前記イメージャ位置及び方向を前記プロセッサに供給し、
前記プロセッサは、前記装置位置及び方向及び前記イメージャ位置及び方向にしたがって前記所望の方向を決定することを特徴とするシステム。
【請求項75】
請求項71に記載のシステムにおいて、前記イメージャは、
前記身体の一方の側に配置される放射発生器と、
前記身体の他方の側に配置される放射検出器とを具え、前記放射検出器は、前記放射発生器によって発生される放射を検出し、前記興味ある部分は、前記放射発生器と前記放射検出器との間に配置され、
該システムは、前記イメージャに結合されるディスプレイをさらに具え、
前記放射検出器は、前記イメージャが前記方向において配置される場合、前記視覚的表現を検出し、
前記ディスプレイは、前記視覚的表現を表示することを特徴とするシステム。
【請求項76】
請求項71に記載のシステムにおいて、前記移動メカニズムは、少なくとも1自由度を有することを特徴とするシステム。
【請求項77】
請求項71に記載のシステムにおいて、前記イメージャは、
核、
超音波及び
電磁気
から成るリストから選択される放射領域において動作することを特徴とするシステム。
【請求項78】
請求項71に記載のシステムにおいて、前記医療用介在装置は、
カテーテルと、
薬剤分配ユニットと、
組織切断ユニットと、
から成るリストから選択されることを特徴とするシステム。
【請求項79】
イメージャを所望の方向に調節し、患者の身体のセクションの視覚的表現を取得する方法において、前記視覚的表現は、医療用介在装置の興味ある部分の最適な表現を含み、該方法は、
前記興味ある部分において前記医療用介在装置に結合される位置及び方向検出器の装置位置及び方向を検出する手順と、
前記イメージャが前記視覚的表現を取得できるように、前記装置位置及び方向にしたがって前記所望の方向を決定する手順と、
前記移動メカニズムに命令し、前記イメージャを前記所望の方向に移動する手順とを含むことを特徴とする方法。
【請求項80】
請求項79に記載の方法において、前記医療用介在装置を前記身体に挿入する予備手順をさらに含むことを特徴とする方法。
【請求項81】
請求項79に記載の方法において、前記イメージャに結合されるイメージャ位置及び方向検出器のイメージャ位置及び方向を検出する手順と、
前記イメージャの位置及び方向を前記イメージャ位置及び方向から決定する手順とをさらに含むことを特徴とする方法。
【請求項82】
請求項79に記載の方法において、前記イメージャ位置及び方向を前記イメージャから取り出す手順をさらに含むことを特徴とする方法。
【請求項83】
請求項79に記載の方法において、前記視覚的表現を前記イメージャによって取得する手順をさらに含むことを特徴とする方法。
【請求項84】
請求項83に記載の方法において、前記視覚的表現を表示する手順をさらに含むことを特徴とする方法。
【請求項85】
請求項79に記載の方法において、前記移動メカニズムは少なくとも1自由度を有することを特徴とする方法。
【請求項86】
請求項79に記載の方法において、イメージャは、前記視覚的表現を、前記セクションに照射することによって取得することを特徴とする方法。
【請求項87】
請求項1〜86のいずれかに実質的に記載されているか、いずれかの図面に実質的に図示された、請求項1〜21、33〜48、55〜60、及び71〜78のいずれかに記載のシステム。
【請求項88】
請求項1〜86のいずれかに実質的に記載されているか、いずれかの図面に実質的に図示された、請求項22〜32、49〜54、及び61〜71のいずれかに記載の方法。
【図1A】


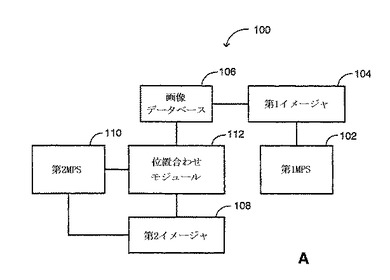
【図1B】

【図1C】
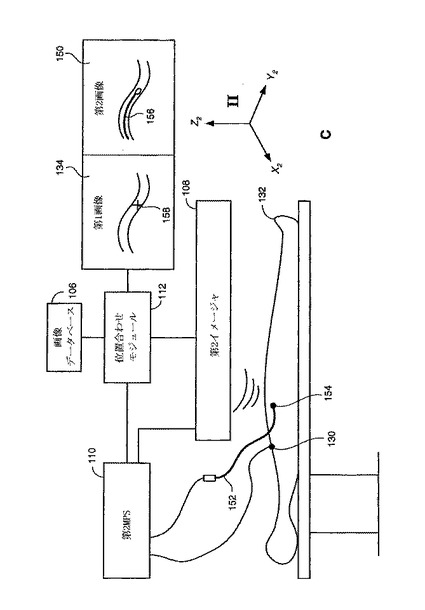
【図1D】
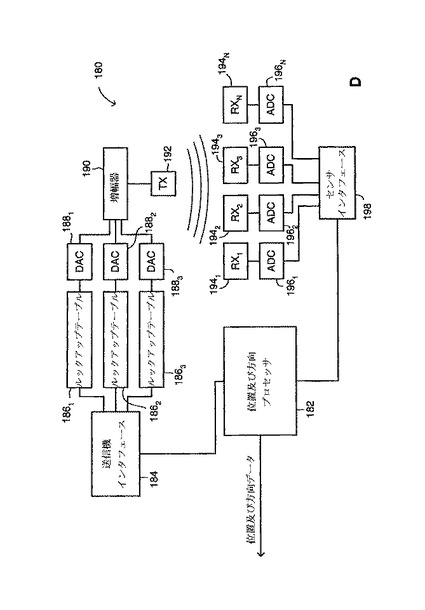
【図2A】
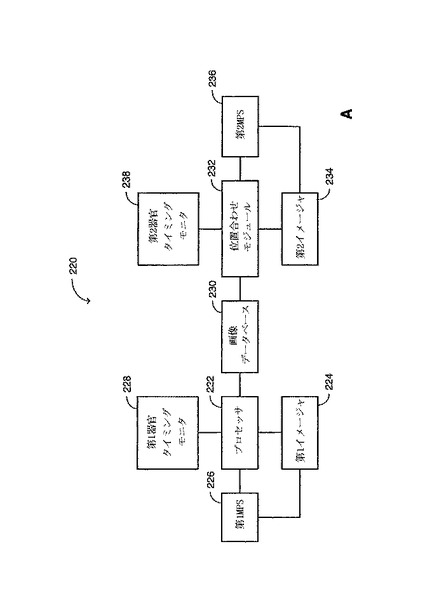
【図2B】
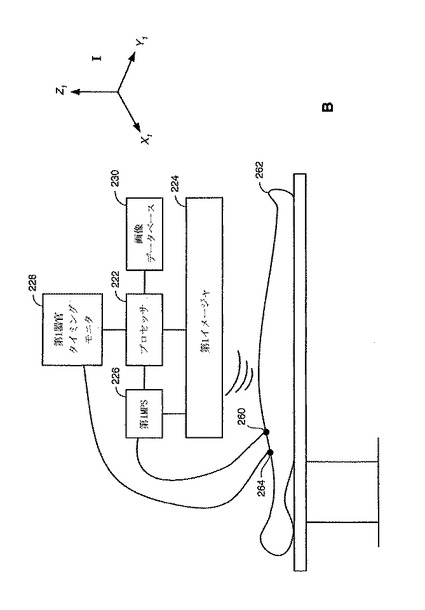
【図2C】

【図2D】
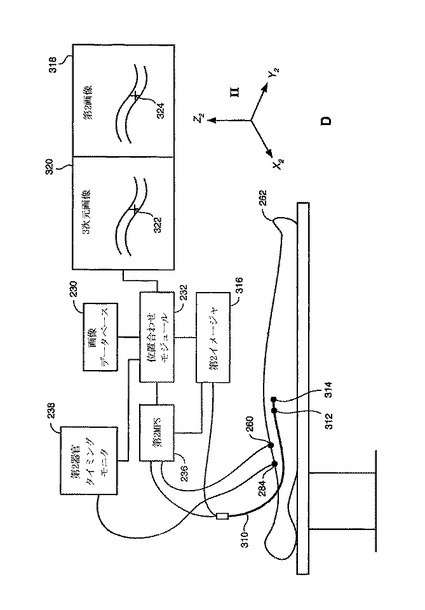
【図3A】
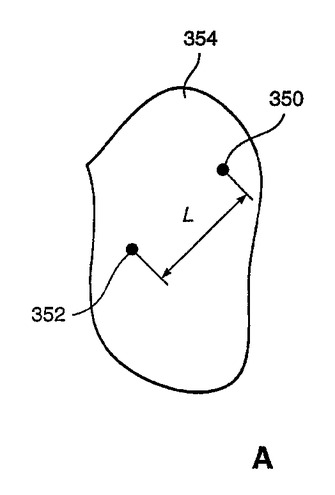
【図3B】

【図3C】
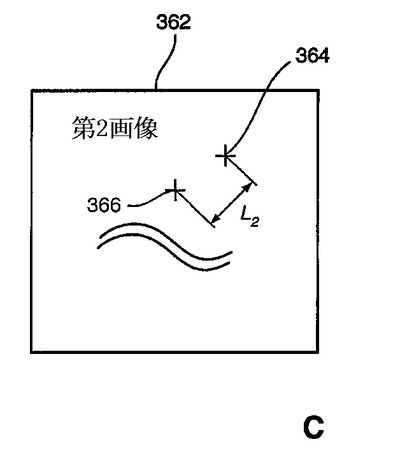
【図3D】

【図4】
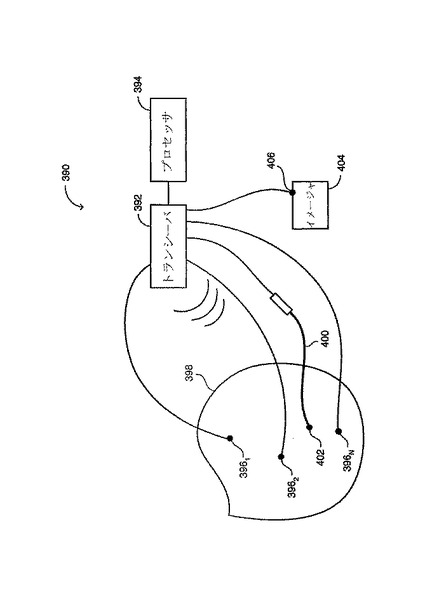
【図5】
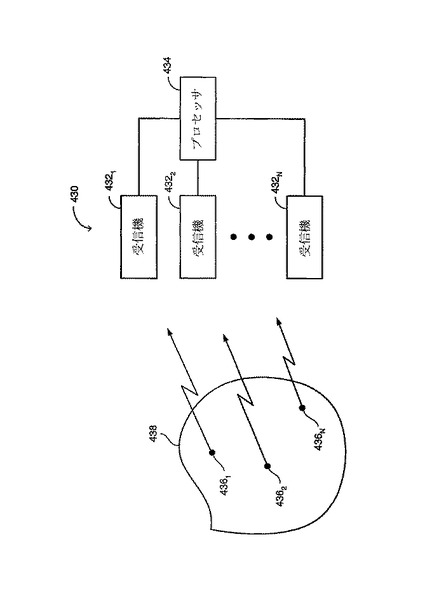
【図6】
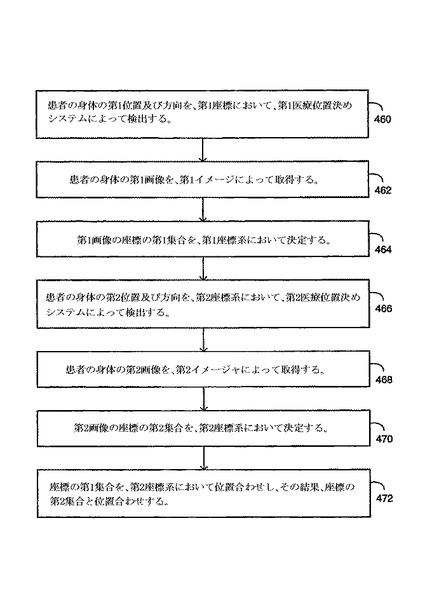
【図7】

【図8】

【図9A】
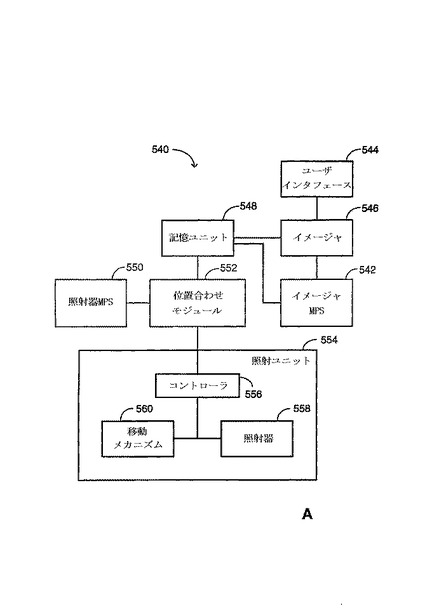
【図9B】

【図9C】
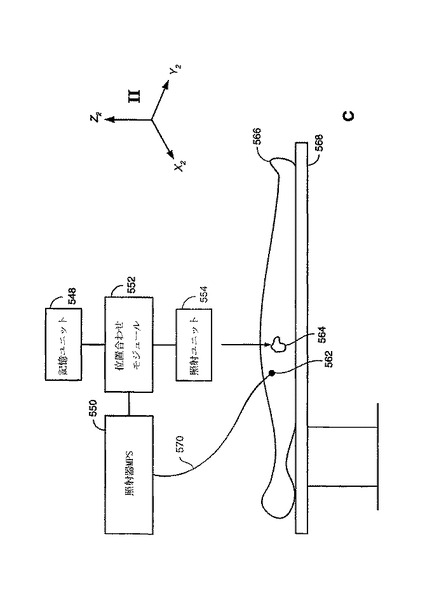
【図10】

【図11】
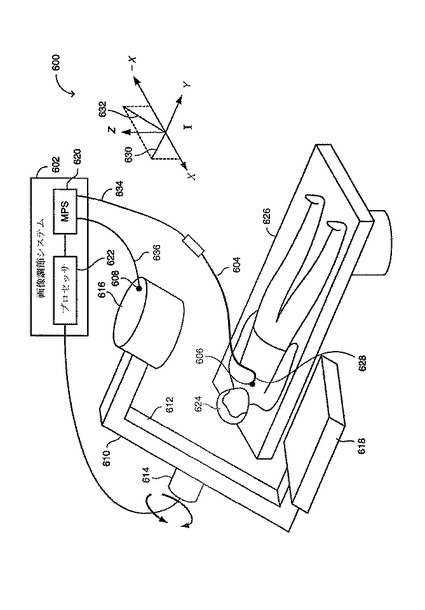
【図12】
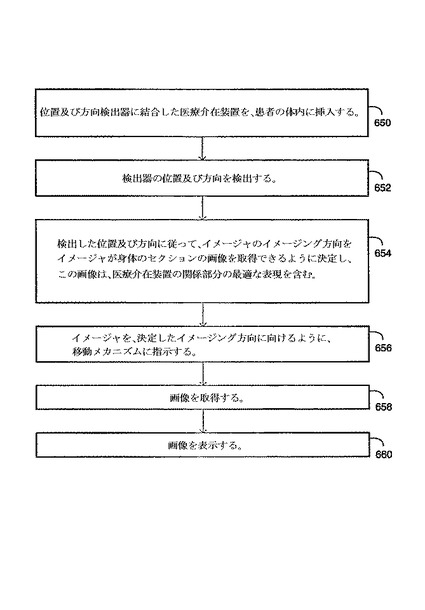
【図1B】
【図1C】
【図1D】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】
【図3D】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図9C】
【図10】
【図11】
【図12】
【公開番号】特開2010−155098(P2010−155098A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−44571(P2010−44571)
【出願日】平成22年3月1日(2010.3.1)
【分割の表示】特願2005−512871(P2005−512871)の分割
【原出願日】平成15年12月18日(2003.12.18)
【出願人】(501448314)メディガイド リミテッド (13)
【Fターム(参考)】
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2010−44571(P2010−44571)
【出願日】平成22年3月1日(2010.3.1)
【分割の表示】特願2005−512871(P2005−512871)の分割
【原出願日】平成15年12月18日(2003.12.18)
【出願人】(501448314)メディガイド リミテッド (13)
【Fターム(参考)】
[ Back to top ]