
管内移動装置

【課題】内径が大きく変化した配管や、湾曲した配管や、エルボ状に直角に曲がった配管等の管路内であっても、スムーズに移動させることが可能な管内移動装置を提供すること。
【解決手段】管内移動装置1は、配管8内を移動する装置であって、車輪3を備えた車輪架台2と、車輪架台2の上に支持された本体架台4と、モータMによって回転駆動される駆動輪5と、本体架台4に相対して配置されると共に、駆動輪5が回転自在に配置された駆動架台6と、を備えている。調整機構7は、管内移動装置1が配管8内を走行する際に、配管8の内径Dの大きさに合わせて本体架台4と駆動架台6との間隔L1を広げる方向に常に付勢して、車輪3と駆動輪5とを配管8の内壁8aに押し当てる。
【解決手段】管内移動装置1は、配管8内を移動する装置であって、車輪3を備えた車輪架台2と、車輪架台2の上に支持された本体架台4と、モータMによって回転駆動される駆動輪5と、本体架台4に相対して配置されると共に、駆動輪5が回転自在に配置された駆動架台6と、を備えている。調整機構7は、管内移動装置1が配管8内を走行する際に、配管8の内径Dの大きさに合わせて本体架台4と駆動架台6との間隔L1を広げる方向に常に付勢して、車輪3と駆動輪5とを配管8の内壁8aに押し当てる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、配管内を移動する管内移動装置に関する。
【背景技術】
【0002】
従来、港湾において、船舶で海上輸送した建設資材のコンクリート等を陸上の目的場所まで搬送する場合には、配管(パイプライン)を使用して搬送する方法が多く利用されている。その配管は、搬送するコンクリートによって内壁が腐食したり、コンクリートに含まれる砂や砂利によって内壁が損傷を受けたりする。その腐食や損傷を放置すると、管壁に穴があき、その穴からコンクリートが外部に漏れる事態へと進行する。
【0003】
この問題点を解消するためには、定期的に配管内の浸食具合を検査し、その浸食程度に応じて配管を補修する必要がある。現在、配管内壁の浸食検査は、検査者の経験により、浸食を受けていると推定される箇所を切断して浸食状況を確認し、その結果、配管の内壁に不良箇所が見つからなければ溶接によって切断した箇所を補修して復元している。
【0004】
このように、配管を切断したり、溶接して復元したりして配管内検査を実施する方法では、切断作業や溶接作業等の作業工数が加わり、作業効率の低下を招いていた。
そこで、従来、いきなり故障と思われる箇所を切断することなく、配管内を移動しながら配管内を検査したり、計測したりすることを可能にした管内移動装置が提案されている(例えば、特許文献1〜3参照)。
【0005】
特許文献1に記載の管内移動装置(配管内作業ロボット)は、大型の配管内を走行しながら配管の内壁面の補修塗装や欠陥検出や位置計測等を行う作業ロボットであり、作業用アームを有する走行台車と、塗料タンクを積載した作業台車と、を連結してなる。
【0006】
特許文献2に記載の管内移動装置(管内移動体)は、エアタンクとゴム車輪とによりマンホール内の水面に浮上して、先端にゴム車輪を設けた開閉脚が伸縮エアシリンダの駆動で開閉することと、水流とによって移動するようになっている。
【0007】
特許文献3に記載の管内移動装置(配管内移動機構)は、車輪を回転させるモータを内設した2つの構造物間に、2つの構造物を互いに離反させる板ばねを設けて、車輪を配管の内壁面に圧接させながら配管内を移動させる装置である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平5−68917号公報(図1)
【特許文献2】特開平7−112169号公報(図1)
【特許文献3】特開平9−11890号公報(図1及び請求項1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
前記特許文献1〜3に記載されたような管内移動装置が移動する配管には、水平な管路、垂直な管路、直角に曲がったエルボの管路、内径が段差状に変化するレデューサー等の種々の形状の管路があるため、管内移動装置は、あらゆる形状の管路に対応して自由に移動可能であることが望まれている。
【0010】
しかし、特許文献1に記載の管内移動装置は、任意の配管径の位置に対して設定可能としているものの、塗装用スプレイノズルやブラスト装置を備えた作業アームを搭載して走行する走行台車と、燃料タンクを搭載した作業台車と、を連結してなる大型の作業ロボットである。このため、特許文献1の管内移動装置が移動する配管は、コンクリート移送用配管と比較してより内径の大きい配管が対象になる。
【0011】
このような大型の配管内作業ロボットは、全体の重量が重いため、水平に配置された大径の配管内の下側内壁上を走行車輪が転動して走行する場合にしか利用することができず、配管内で作業ロボットの上下方向の向きが反転するような場所では使用できない。
つまり、配管内作業ロボットは、走行車輪側が上側になった場合、作業アームや加圧ローラ等によって走行台車及び作業台車を支えることが可能な強度を有していないため、上下の向きを逆様にして使用するような情況は考慮されていない。
【0012】
また、特許文献2に記載の管内移動装置は、先端にゴム車輪を設けた開閉脚が、伸縮エアシリンダの駆動で開閉して移動するため、移動速度が遅く、作業効率は高くない。
【0013】
また、特許文献3に記載の管内移動装置は、車輪を備えた複数の構造体の間に、その複数の構造物を互いに離反する方向に付勢させる板ばねを設けて、板ばねのばね力によって車輪を配管の内壁に押し付けながら回転させて、管路内を走行する。
しかしながら、その管内移動装置は、板ばねの弾性変形を利用して複数の構造物を互いに離反させているので、板ばねの変形量が小さく、離反させることが可能な距離も僅かであるため、2インチ以下の小口径配管が対象になっている。
【0014】
このような板ばねによって車輪を配管の内壁に押し付ける管内移動装置は、車輪の伸縮が僅かであるので、レデューサー等の内径が大きく変わる管路に対しては管内移動装置を走行させるのに必要な押付力は確保し難く、配管の内径が大きく変化する管路では走行させることが困難であった。
【0015】
そこで、本発明は、前記実情に鑑み創案されたものであり、内径が大きく変化した配管や、湾曲した配管や、エルボ状に直角に曲がった配管等の管路内であっても、スムーズに移動させることが可能な管内移動装置を提供することを課題とする。
【課題を解決するための手段】
【0016】
前記課題を解決するために、請求項1に記載の管内移動装置は、配管内を移動する管内移動装置であって、車輪を備えた車輪架台と、前記車輪架台の上に支持された本体架台と、モータによって回転駆動される駆動輪と、前記本体架台に相対して配置されると共に、前記駆動輪が回転自在に配置された駆動架台と、前記本体架台と前記駆動架台との間に介在させて、前記本体架台と前記駆動架台との間隔を調整する調整機構と、を備えており、前記調整機構は、前記管内移動装置が配管内を走行する際に、前記配管の内径の大きさに合わせて前記本体架台と前記駆動架台との間隔を広げる方向に常に付勢して、前記車輪と前記駆動輪とを前記配管の内壁に押し当てることを特徴とする。
【0017】
かかる構成によれば、管内移動装置は、内径の大きさが変化する配管内を移動する場合に、調整機構が常に本体架台と駆動架台とを離間させる方向に付勢しているので、車輪架台を備えた本体架台と駆動輪を備えた駆動架台との間隔が自動的に調整されて、車輪及び駆動輪の外周面を配管の内壁にそれぞれ適切な押付力で押し当て、モータが回転すると、駆動輪の外周面と配管の内壁との間の摩擦力によって推進力が発生し、配管内を走行移動することができる。
【0018】
請求項2に記載の管内移動装置は、請求項1に記載の管内移動装置であって、前記調整機構は、前記本体架台または前記駆動架台の一方に基端部が固定されたシリンダと、前記本体架台または前記駆動架台の他方に先端部が固定され、前記シリンダによって進退するシリンダロッドと、を備えていることを特徴とする。
【0019】
かかる構成によれば、管内移動装置は、調整機構のシリンダロッドが、シリンダによって駆動して進退すると、車輪が配置された本体架台と、駆動輪が配置された駆動架台との間隔を自動的に調整できるので、車輪及び駆動輪を配管の内壁に適度な押付力で押し当てることができる。このため、駆動輪が転動すれば、管内移動装置は、管路内を移動する。
【0020】
請求項3に記載の管内移動装置は、請求項1または請求項2に記載の管内移動装置であって、前記車輪架台は、前記本体架台に対して連結具によって水平方向に回動自在に連結されていることを特徴とする。
【0021】
かかる構成によれば、管内移動装置は、車輪架台が本体架台に対して回動自在に連結されていることによって、カーブしている管路を走行する際に、車輪の側面が配管の内壁に当接してその内壁に押し付けられると、車輪架台が車輪と共に連結具を中心として本体架台に対して水平に回動するため、車輪の向きを管路のカーブに応じて自動的に方向変換させることができる。
【0022】
請求項4に記載の管内移動装置は、請求項1ないし請求項3のいずれか1項に記載の管内移動装置であって、前記車輪架台は、前記本体架台の下部中央部に水平方向に回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする。
【0023】
かかる構成によれば、車輪架台は、この車輪架台の前後左右に配置された4つの車輪によって安定した状態に支持されている。その本体架台は、下部中央部に車輪架台が回動自在に配置されていることによって、走行中に、車輪の側面がカーブしている配管の壁面に押し当ると、配管の内壁面にガイドされて車輪架台を配管が曲がっている方向に回動させて、車輪架台と共に回動して車輪の向きが変わる。このため、管内移動装置は、移動する方向を管路の曲がり具合に合わせて自由に方向変換することができるので、曲がっている管路であっても、スムーズに移動することが可能となる。
【0024】
請求項5に記載の管内移動装置は、請求項1ないし請求項3のいずれか1項に記載の管内移動装置であって、前記車輪架台は、前記本体架台の下部の前端部及び後端部にそれぞれ回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする。
【0025】
かかる構成によれば、車輪架台は、前後左右に車輪が配置されていることによって、4つの車輪により安定した状態に支持されている。また、本体架台は、その車輪架台が下部の前端部及び後端部にそれぞれ配置された2台によって、合計8つの車輪が配管の内壁に押し付けられて管内移動装置を配管に対してガタツキなく支持するため、管内移動装置の移動を安定化させることができる。その2台の車輪架台は、それぞれ本体架台に回動自在に配置されているので、管内移動装置がカーブした管路を走行する際には前後の車輪架台の向きが自由に方向変換できるため、曲がっている管路であっても、スムーズに移動することができる。
【0026】
請求項6に記載の管内移動装置は、請求項1ないし請求項5のいずれか1項に記載の管内移動装置であって、前記駆動輪には、前記駆動架台に回転自在に配置され前記駆動輪が軸着された駆動軸と、前記駆動軸に軸着された従動車と、前記モータのモータ軸に軸着された原動車と、が設けられ、前記従動車と前記原動車とは、ベルトまたはチェーンからなる駆動機構によって回転が伝達されることを特徴とする。
【0027】
かかる構成によれば、管内移動装置は、駆動輪が、駆動架台の中央部外側に配置されていることによって、その駆動輪が1つであっても、モータが回転すれば、駆動輪が配管の内壁面に当接しながら転動して管内移動装置が移動する。
【0028】
請求項7に記載の管内移動装置は、請求項1ないし請求項6のいずれか1項に記載の管内移動装置であって、前記駆動架台は、前記モータが配置された駆動架台本体と、前記本体架台の前端部及び後端部に載設された一対の前記調整機構のシリンダロッドの先端部に設置された一対のブラケットと、前記駆動架台本体と前記一対のブラケットとの間に介在されて、前記駆動架台本体と前記ブラケットとの間隔を調整する調整板と、備えていることを特徴とする。
【0029】
かかる構成によれば、管内移動装置は、駆動架台本体と一対のブラケットとの間に、高さを調整する調整板がそれぞれ介在されていることによって、調整板の厚さ分だけ駆動架台本体及び駆動輪の位置を厚さ方向に調整することができる。
【発明の効果】
【0030】
本発明の請求項1に係る管内移動装置によれば、内径の大きさが変化するレデューサー等の配管内を移動する場合、車輪と駆動輪との間隔制御が調整機構の駆動によって調整できることにより、車輪と駆動輪とを配管の内壁に常に適切な押付力を作用させることができる。このため、管内移動装置は、駆動輪を転動させれば、配管の内径が大きく変化する管路内であっても、管内移動装置を移動することができる。
【0031】
本発明の請求項2に係る管内移動装置によれば、管内移動装置は、調整機構によって本体架台と駆動架台との間隔を調整することにより、車輪と駆動輪との間隔も調整して、車輪及び駆動輪を配管の内壁に適度な押付力を加えることができる。このため、管内移動装置は、配管の内径が変化する管路内や、垂直に配置された管路や、傾斜した管路であっても、常時、車輪及び駆動輪を配管の内壁に圧接させてスムーズに走行移動することができる。
【0032】
本発明の請求項3に係る管内移動装置によれば、管内移動装置は、カーブしている管路を走行する際に、車輪の側面が配管の内壁に当接して内壁に押し付けられると、車輪架台が車輪と共に回動して、車輪の向きを管路のカーブに合わせて自動的に方向変換させて進行させることができる。このため、管内移動装置は、曲がった配管の管路や、直角に曲がったエルボ状の管路であっても、配管の曲がり状況に応じて車輪の向きを自動変換させてスムーズに移動することができる。
【0033】
本発明の請求項4に係る管内移動装置によれば、管内移動装置の本体架台は、前後左右に車輪を配置した車輪架台が、下部中央部に回動自在に配置されていることによって、車輪の側面が曲がっている配管の内壁に押し当ると、車輪が車輪架台と共に回動して車輪の向きが変わる。このため、管内移動装置は、曲がっている管路であっても、管路の曲がっている方向に車輪の向きが自動的に変わるので、スムーズに移動することができる。
【0034】
本発明の請求項5に係る管内移動装置によれば、管内移動装置は、本体架台の前端部及び後端部の下部に、前後左右に4つの車輪を備えた車輪架台がそれぞれ配置されていることによって、管内移動装置を安定した状態に保って移動することができる。
【0035】
本発明の請求項6に係る管内移動装置によれば、管内移動装置は、駆動輪が駆動架台の中央部外側に配置されていることによって、その駆動輪が1つであっても、安定した状態で移動することができる。
【0036】
本発明の請求項7に係る管内移動装置によれば、管内移動装置は、駆動架台本体とブラケットとの間隔を調整板で調整することによって、調整板の厚さ分だけ駆動架台本体及び駆動輪の位置を厚さ方向に調整して、駆動輪の外周面を適宜な押付力で配管の内壁に押し当てることができる。
【図面の簡単な説明】
【0037】
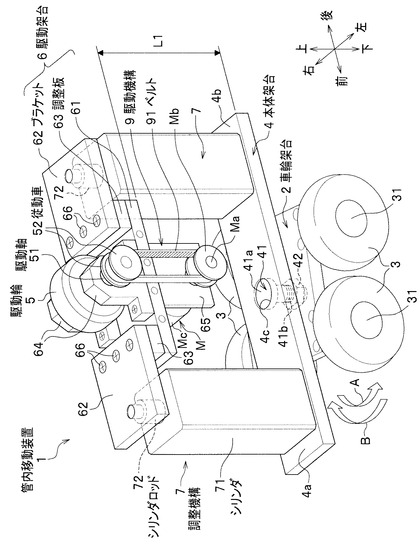
【図1】本発明の実施形態に係る管内移動装置を示す斜視図である。
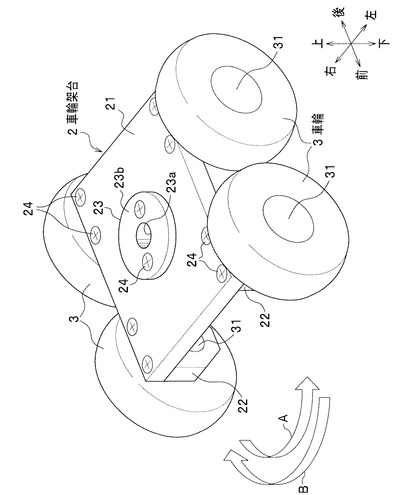
【図2】本発明の実施形態に係る管内移動装置の車輪架台の拡大斜視図である。
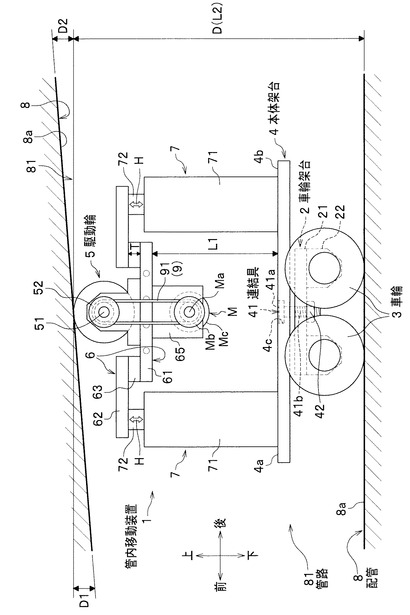
【図3】本発明の実施形態に係る管内移動装置を示す概略図であり、内径が変化する管路内を移動するときの状態を示す。
【図4】本発明の実施形態に係る管内移動装置がエルボ内を移動するときの状態を示す概略図である。
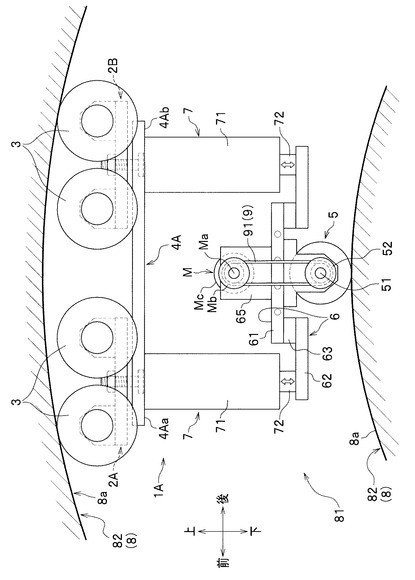
【図5】本発明の実施形態に係る管内移動装置の変形例を示す斜視図である。
【図6】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、曲がった配管内を移動するときの状態を示す。
【図7】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、エルボ内を移動するときの状態を示す。
【図8】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、エルボ内を逆様の状態で移動するときの状態を示す。
【図9】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、配管の内径が変化する場所を移動するときの状態を示す。
【発明を実施するための形態】
【0038】
次に、図1〜図4を参照して本発明の実施形態に係る管内移動装置1を説明する。
なお、本実施形態において、管内移動装置1は、配管8を取り付ける場所や、配管8の設置状態によってその向きが変化する。このため、前後左右上下の方向は、任意であるが、便宜上、図1及び図2に示す図面の左側を「前」、右側を「後」、前側を「左」、後側を「右」、下側を「下」、上側を「上」として説明する。
管内移動装置1を説明する前に、この管内移動装置1が走行する配管8(図3参照)について説明する。
【0039】
≪配管の構成≫
図3に示すように、配管8は、管内移動装置1が移動可能な管状部材や筒状部材やトンネル状の管路81を有するものであればよく、その使用目的等は特に限定されない。この配管8は、内壁8aの状態を検査したり、計測したり、内壁8aを補修したりする必要性のあるものが対象である。配管8は、例えば、生コンクリート等の泥状の材料や、建設材料、合成樹脂、食品等の粉体や、粒子状の材料や、石油等の液体や、天然ガス等の気体を搬送するのに使用されるパイプライン等である。
【0040】
≪管内移動装置の構成≫
図1に示すように、管内移動装置1は、配管8(図3参照)内の管路81(図3参照)を前後方向に移動させながら配管8内の検査と補修等を行うための走行用ロボット(自走台車)である。管内移動装置1は、回転自在な車輪3と、この車輪3を備えた車輪架台2と、この車輪架台2が回動自在に連結された本体架台4と、管内移動装置1を走行させるための駆動輪5と、この駆動輪5を回転させる原動力を発生させるモータMと、モータMの回転を駆動輪5に伝達する駆動機構9と、駆動輪5が配置された駆動架台6と、駆動輪5の位置を調整するための調整機構7と、配管8内を検査する検査装置(図示省略)と、配管8の内壁8aを補修する補修装置(図示省略)と、モータM等を駆動させるための電源(図示省略)と、この電源等を制御する制御装置(図示省略)と、を備えている。
【0041】
≪車輪の構成≫
図2に示すように、車輪3は、車輪架台2に対して回転自在に配置された回転体であり、例えば、車輪架台2の前後左右に回転自在に配置された4つのローラからなる。各車輪3は、中心部に設置された車軸31に回転自在に軸支されて、管内移動装置1が移動すると配管8(図3参照)の内壁8aと摩擦で転動するように、その内壁8aに当接する状態に配置される。
車軸31は、基端部が、車輪架台2の下面の前後左右に固定された軸支部材22にそれぞれ固定され、各先端部が、各車輪3の中央部に設けられた軸受部(図示省略)に回転自在に軸支されている。
【0042】
≪車輪架台の構成≫
図2に示すように、車輪架台2は、複数(例えば、4つ)の車輪3の車軸31が配置された略厚板状の車輪用基台であり、例えば、車輪架台2の左右前後の外側に車輪3がそれぞれ配置されている。車輪架台2は、車輪架台本体21と、この車輪架台本体21の下面の左右前後に固定された軸支部材22と、車輪架台本体21の中央部に設置されたスラストブッシュ23と、軸支部材22及びスラストブッシュ23を車輪架台本体21に固定するための固定具24と、を備えている。この車輪架台2は、本体架台4の下部中央部に回動可能に配置されている。
【0043】
車輪架台本体21は、平らな矩形をした厚板部材からなり、中央部にスラストブッシュ23を挿入するための縦孔(図示省略)が板厚方向に向けて穿設されている。
軸支部材22は、車輪架台本体21の下面の左右前後から下側に向けて突出した状態に固定された厚板状の部材からなり、車軸31を軸支するための軸孔が穿設されている。
スラストブッシュ23は、車輪架台本体21の中央部に穿設された縦孔(図示省略)に挿入される筒部23aと、この筒部23aの上端部に形成されたフランジ部23bと、からなる。筒部23a内には、結合ピン41(図1参照)のねじ部41bが挿通される。フランジ部23bは、車輪架台本体21の盤面に固定具24によって固定される部位であり、鍔状に形成されている。
固定具24は、例えば、ねじ部材、あるいは、ボルト・ナット等からなる。
【0044】
≪本体架台の構成≫
図1に示すように、本体架台4は、管内移動装置1の本体フレームを構成する部材であり、例えば、前後方向に長い略帯状の平らな厚板部材からなる。この本体架台4には、結合ピン41が挿入される貫通孔4cと、前端部4a及び後端部4b上に載設された調整機構7のシリンダ71と、が設けられている。
【0045】
貫通孔4cは、結合ピン41の頭部41aが没入する段差部(図示省略)を有する孔からなり、本体架台4の中央部に穿設されている。
結合ピン41(連結具)は、本体架台4に対して、車輪架台2を回動自在に連結するための連結ピンであり、頭部41aと、ナット42が螺合されるねじ部41bと、が形成された段付きボルトからなる。なお、車輪架台2は、この結合ピン41を中心として水平方向(矢印A,B方向)に回動する。
【0046】
≪調整機構の構成≫
図1に示すように、調整機構7は、本体架台4とこの本体架台4に相対して配置された駆動架台6との間隔L1を広げる方向に常に付勢して、車輪3と駆動輪5とを配管8の内壁8aに押し当てる装置である。この調整機構7は、例えば、本体架台4の前端部4a及び後端部4bに設置されて同時に作動する一対の装置からなる。調整機構7は、本体架台4と駆動架台6との間に介在させて、本体架台4と駆動架台6との間隔L1を調整することによって、車輪3と駆動輪5とを配管8の内壁8aにそれぞれ押し当てる押付力、及び、車輪3と駆動輪5との間隔L2(図3参照)も調整することができる。
【0047】
調整機構7は、駆動架台6を本体架台4に対して上下方向に進退移動させるなどして、前記間隔L1,L2(図3参照)を調整できるものであればよく、その構造は特に限定されない。つまり、調整機構7は、例えば、流体圧シリンダ機構や、ねじ棒と雌ねじ部材と電動モータを利用したねじ機構や、ラックとピニオンと電動モータを利用したラックアンドピニオン機構等によって、シリンダロッド72を進退させてよい。以下、調整機構7は、空気圧シリンダからなる場合を例に挙げて説明する。
【0048】
図1に示すように、調整機構7は、基端部が本体架台4の前後端部上に固定されたシリンダ71と、先端部が駆動架台6に固定されて、シリンダ71によって進退するシリンダロッド72と、シリンダロッド72を駆動させるための不図示のエア供給源と、このエア供給源を制御する制御装置(図示省略)と、を備えた一対の空気圧シリンダからなる。
【0049】
シリンダ71は、本体架台4等に載設されたエア供給源(図示省略)から供給された圧縮空気によってシリンダロッド72を上昇あるいは下降(進退)する。
シリンダロッド72は、基端部がシリンダ71に内設され、先端部側が前後に配置されたブラケット62にそれぞれ固定されている。
不図示のエア供給源は、シリンダ71内に圧縮空気を供給してシリンダロッド72を上昇及び下降させる装置であり、例えば、空気圧縮機やモータポンプや電磁ポンプ等からなる。エア供給源は、調整機構7に内設するか、本体架台4に載設するか、あるいは、圧縮空気供給用のチューブを介して配管8の外部に配置されている。このエア供給源は、後記する制御装置(図示省略)によって制御される。
【0050】
≪駆動輪の構成≫
駆動輪5は、モータMの回転を駆動機構9を介して伝達させて駆動輪5を回転駆動させることによって、管内移動装置1を走行させる走行源であり、1つの電動車輪からなる。駆動輪5は、駆動架台6の中央部外側(上部中央)に回転自在に配置された駆動軸51と、この駆動軸51に軸着された従動車52と、が前記モータMによって一体に回転するようになっている。駆動輪5は、常時、配管8の内壁8aに、調整機構7の空気圧によって弾性的に押し付けられた状態に配置されている。
【0051】
図1に示すように、駆動軸51は、駆動輪5の中央部に挿通した状態に固定された回転軸であって、駆動輪5を支える回転伝達軸である。この駆動軸51は、その両端部が駆動架台本体61の左右端部に載設された一対の軸受部材64によって回転自在に軸支されて、左右方向に向けて配置されている。
従動車52は、駆動軸51の左端部に軸合されて、駆動架台6の中央部の軸受部材64の外側に配置されている。従動車52は、例えば、タイミングベルトからなるベルト91の歯形部が噛合する歯形部を有するスプロケットからなる。
【0052】
≪モータの構成≫
モータMは、駆動輪5を回転させるための駆動源であり、駆動架台本体61の下面中央部にモータ軸Maを左右方向に向けて配置されている。モータMは、このモータMに設けられたモータ軸Maと、モータ軸Maに軸着された原動車Mbと、モータ軸Maを回転自在に軸支したモータケースMcと、を有している。
モータ軸Maは、前記駆動軸51に対して平行に配置されている。
原動車Mbは、前記従動車52と同様に、ベルト91が巻き掛けられてベルト91の歯形部が噛合する歯形部を有するスプロケットからなる。
モータケースMcは、左右端部が、駆動架台本体61の下面から垂下した一対のモータ保持板65によって保持されている。
【0053】
≪駆動機構の構成≫
駆動機構9は、モータMの回転を駆動輪5に伝達して回転駆動させるための伝達装置であり、原動車Mbと従動車52とに巻き掛けられた無端のベルト91を備えている。
ベルト91は、原動車Mbの回転を従動車52へ伝達できるものであればよく、チェーンであっても構わない。
【0054】
≪駆動架台の構成≫
図1に示すように、駆動架台6は、駆動輪5及びモータMを支持し、調整機構7によって上昇及び下降(進退)する板状部材であり、前後端部がシリンダロッド72で水平に保持されている。駆動架台6は、モータMが配置された駆動架台本体61と、一対の調整機構7のシリンダロッド72の上端部(先端部)に設置された一対のブラケット62と、駆動架台本体61と一対のブラケット62との間にそれぞれ介在させてブラケット62に対する駆動架台本体61の高さを調節するための一対の調整板63と、前記軸受部材64と、前記モータ保持板65と、を備えてなる。
【0055】
駆動架台本体61は、モータM及び駆動輪5が設置されるベース状の厚板部材である。
ブラケット62は、駆動架台本体61の前後に配置されて、シリンダロッド72によって常に押圧されている厚板部材である。
調整板63は、駆動架台本体61とブラケット62との間隔Tを調整するための板部材である。この調整板63は、厚さの相違する板部材や、複数の板部材を駆動架台本体61とブラケット62との間に介在させることによって、間隔Tを調整する。
軸受部材64は、駆動軸51を駆動輪5の両側から軸支する一対の厚板状の部材であり、互いに駆動輪5を介して平行に対向して駆動架台本体61に載設されている。
モータ保持板65は、モータMのモータ軸Maの両端側から挟持するようにして保持する一対の板部材からなる。
【0056】
≪検査装置及び補修装置の構成≫
不図示の検査装置は、図3に示す配管8の内壁8aを検査する装置であって、例えば、撮像カメラ装置や、赤外線カメラ装置や、配管8の内径Dや、寸法を計測する計測装置等からなる。この検査装置は、駆動架台6または本体架台4に載設されている。
不図示の補修装置は、腐食したり、損傷を受けたりした配管8の内壁8aを補修する装置であり、例えば、溶接ロボットや、塗装ロボットや、ロボットアーム等からなる。この補修装置は、駆動架台6または本体架台4に載設されている。
【0057】
≪電源の構成≫
不図示の電源は、モータMや検査装置や補修装置や制御装置や調整機構7等を駆動させるための装置であり、バッテリあるいは発電機からなる。電源は、管内移動装置1に搭載されるか、あるいは、電線を介して配管8の外部に配置されている。
【0058】
≪制御装置の構成≫
不図示の制御装置は、モータM、調整機構7、検査装置及び補修装置を制御する装置であり、管内移動装置1に搭載されて、配管8の外部に配置された遠隔コントローラ(図示省略)によって遠隔操作されるようになっている。この場合、制御装置と遠隔コントローラ(リモコン)との間は、電線によって接続するか、または、無線によって制御信号が送受信されるようになっている。なお、遠隔コントローラには、モータM、調整機構7、検査装置及び補修装置を遠隔操作する装置と、カメラ等からなる検査装置で撮像した映像を映し出すモニタが備えられている。
【0059】
≪作用≫
次に、図1〜図4を参照しながら、管内移動装置1の作用を説明する。
図3に示すように、管内移動装置1を配管8内の管路81を走行させる場合は、まず、管内移動装置1を配管8内に配置する。次に、作業者は、不図示の遠隔コントローラを操作して、制御装置(図示省略)を作動させて調整機構7を駆動させる。そして、調整機構7の左右のシリンダ71内に圧縮空気を送り込んでシリンダロッド72を上昇させて、駆動架台6及び駆動輪5を上昇させ、駆動輪5を配管8の内壁8aに常に押し当てる。
【0060】
シリンダロッド72が延びることにより、シリンダ71が固定された本体架台4と、シリンダロッド72が固定された駆動架台6との間隔L1(図1参照)が広がり、車輪3と駆動輪5との間隔L2も広がる。
このように、調整機構7のシリンダロッド72は、空気圧によってシリンダ71から突出すると、配管8の内径Dの大きさに応じて進退し、前記空気圧に比例した押付力で、車輪3及び駆動輪5を弾性的に配管8の内壁8aに押し当てる。
【0061】
このため、管内移動装置1は、配管8が垂直配置されている場合や、配管8が傾斜配置されている場合であっても、車輪3と駆動輪5とがそれぞれ配管8の内壁8aに押し付けられるので、車輪3及び駆動輪5の外周面と、配管8の内壁8aとの摩擦で、滑り落ちることなく配管8内に支持される。
【0062】
例えば、モータMを正転させれば、モータMの回転が、モータ軸Maから原動車Mb、ベルト91、従動車52、駆動軸51へと伝達されて、駆動輪5が配管8の内壁8aに当接した状態で回転し、駆動輪5の外周面と配管8の内壁8aとの間の摩擦力によって推進力が発生して管内移動装置1が前進する。そして、モータMを反転させれば、前進とは駆動輪5等が反対方向へ回転して、管内移動装置1が後退する。
【0063】
図3に示すように、配管8の内径Dの大きさが、場所によって変化するレデューサー等の管路81内を管内移動装置1が移動する場合、例えば、その配管8の内径Dが長さD1分だけ小さくなる方向(前側)へ移動すると、駆動輪5と、駆動輪5と一体に径方向に移動する駆動架台6及びシリンダロッド72とが、長さD1分だけ配管8の中心方向へ移動して、シリンダロッド72が高さH分だけ押し込まれて変動する。
【0064】
また、管内移動装置1が、例えば、配管8の内径Dが長さD2分だけ大きくなる方向(後側)へ移動すると、駆動輪5、駆動架台6及びシリンダロッド72とが、長さD2分だけ径外方向へ移動して、シリンダロッド72が高さH分だけ圧縮空気によって押し上げられて変動する。
【0065】
したがって、管内移動装置1は、配管8の内径Dの大きさが変化する管路81であっても、車輪3と駆動輪5との間隔L2が変動して配管8の内径Dの変化に対応するため、スムーズに移動させることが可能である。
【0066】
なお、配管8の内径Dが調整機構7の調整可能範囲を越えて変化する場合、例えば、前記した長さD1の長さ分よりもさらに縮径して小さい場合には、図1に示す調整板着脱ねじ部材66を取り外して、駆動架台本体61と左右のブラケット62との間に配置された調整板63を厚さの大きい板材に変更するか、あるいは、調整板63を複数枚介在させることによって、調整機構7の調整可能範囲内におさめることができる。このようにして、調整板63の厚さをさらに厚くすると、駆動架台本体61、モータM、駆動機構9及び駆動輪5の位置が、その変更した厚さ分だけ、下側(本体架台4側)へ移動するため、本体架台4と駆動架台6の間隔L1、及び車輪3と駆動輪5との間隔L2(図3参照)を小さく調整することができる。
【0067】
また、配管8と配管8との繋ぎ目や、溶接等によって内壁8a面に凹凸が形成された箇所を管内移動装置1が走行する場合は、走行中に、車輪3,3あるいは駆動輪5がその凹凸に当接すると、管内移動装置1が急激に小さく上下方向に変動する。この変動や、変動したときの衝撃は、シリンダ71が空気圧シリンダから構成されていることによって、空気の圧縮性により吸収して緩和させることができる。
【0068】
なお、その場合は、例えば、エアタンクあるいはコンプレッサのエア供給口に圧力調整弁を設置して、この圧力調整弁を介してシリンダ71にエアが供給されるようにしてもよい。このようにすることによって、ゆっくりした変動や急激な変動があったとしても、シリンダ71の動きをその変動(変化)に対応させて適宜に調整させることが可能になる。
【0069】
また、図4に示すように、管内移動装置1は、調整機構7のシリンダロッド72のシリンダ71から飛び出ている長さと、調整板63の厚さとを適宜に調整することによって、配管8の内径Dの大きさに合わせて駆動輪5の位置を径方向に伸縮させて、車輪3及び駆動輪5を配管8の内壁8aに押し当てることができる。
【0070】
このとき、管内移動装置1は、側面視して上下中央部に配置した駆動輪5と一対の車輪3とで配管8の内壁8aに三点支持されて安定した状態に支持されている。このため、管内移動装置1は、図4に示すような直角に曲がった曲率の小さいエルボ82内や、カーブ状に曲がった配管8内や、管内移動装置1が天地の方向が逆になって逆様の状態で管路81を移動するときであっても、駆動輪5及び車輪3の外周面が、常に内壁8aに押し当てられた状態になるので、モータMを回転させれば、モータMに連動する駆動輪5によって、管路81内を自由に走行させることができる。
【0071】
また、図1及び図2に示すように、車輪3を備えた車輪架台2は、結合ピン41を中心として、左右の水平方向(矢印A及びB方向)に回動自在に設置されているので、配管8内の管路81が水平方向にカーブしている場合であっても、車輪3の側面が内壁8aに押し付けられて、その管路81の形状に応じて自然に車輪3の向きが走行方向を向くため、スムーズに走行することができる。
【0072】
[変形例]
なお、本発明は、前記実施形態に限定されるものではなく、その技術的思想の範囲内で種々の改造および変更が可能であり、本発明はこれら改造および変更された発明にも及ぶことは勿論である。
次に、図5〜図9を参照しながら前記実施形態の変形例を説明する。なお、既に説明した構成は同じ符号を付してその説明を省略する。
【0073】
前記実施形態では、管内移動装置1の本体架台4の下に、1つの車輪架台2を配置した場合を例に挙げて説明したが、これに限定されるものではない。
例えば、図5に示すように、管内移動装置1Aは、本体架台4Aの下部の前端部4Aa及び後端部4Abに、4つの車輪3を備えた車輪架台2A,2Bの2つのユニットを回動自在に軸支してもよい。
【0074】
このように、管内移動装置1Aは、自由に回転する2つの車輪架台2A,2Bを備えたことによって、図6に示すように、エルボ82からなる配管8内の管路81を走行するときに、曲がったエルボ82の内壁8aに車輪3の側面が当接することにより、2つの車輪架台2A,2Bの向きが、それぞれ走行する管路81の走行方向を向いて、「く」の字状に曲がった状態になる。このため、管内移動装置1Aは、たとえ、管内移動装置1Aの前後方向の全体の長さが長くなったとしても、エルボ82のように略直角に曲がった管路81内を、スムーズに移動できるようになる。
【0075】
前後に2つの車輪架台2A,2Bを備えた管内移動装置1Aの場合は、前後方向の長さが長くなるため、図7及び図8に示すように、上下方向に曲率の小さいエルボ状に曲がった管路81を移動するときに、側面視して、4つある車輪3の中央部側の2つの車輪3、または、前後側の2つの車輪3のみが内壁8aに当接するようになる。
このような管内移動装置1Aの場合は、全体の高さL2(図9参照)が低いことが望ましい。
なお、管内移動装置1Aは、パイプライン等からなる配管8に使用する場合、密度の高い物体を輸送するため、配管8の曲率が大きく、問題になることはない。
【0076】
図9に示すように、2つの車輪架台2A,2Bを備えた管内移動装置1Aは、配管8の内径Dが大きく変化する場合であっても、前記実施形態と同様に調整機構7によって、車輪3と駆動輪5との間隔L2が、配管8の内径Dの大きさに応じて調整可能である。この場合、管内移動装置1Aは、前記実施形態の管内移動装置1と比較して、前後方向の長さL3が、車輪3が本体架台4Aの前端部4Aa及び後端部4Abからはみ出した分(L4,L4)だけ長くなっているため、前後の車輪3間のその長さL3が長くなった分だけ、走行性が安定化する。
なお、その長さL3に合わせて本体架台4A及び駆動架台6の前後方向の長さを長くすれば、種々の検査装置(図示省略)や補修装置(図示省略)を積載する設置スペースをさらに拡大させることができる。
【0077】
[その他の変形例]
なお、前記調整機構7は、シリンダロッド72が圧縮空気によって上昇及び下降するエアシリンダからなる場合を説明したが、これに限定されるものではない。
つまり、調整機構7は、シリンダロッド72を本体架台4に対して伸縮させて、常に駆動架台6及び駆動輪5を離間させる方向に付勢させて、駆動輪5及び車輪3を配管8の内壁8aに押圧させるものであればよい。
例えば、調整機構7は、シリンダ71内に高圧のガスを封入し、略一定なばね力でピストンロッドを弾出させて駆動架台6を押圧することによって、駆動輪5を配管8の内壁8aに押圧させるガススプリングであっても構わない。
【0078】
あるいは、調整機構7は、油圧等の流体圧を利用してシリンダロッド72を進退させることによって駆動架台6を移動させる流体圧シリンダ機構であってもよい。
また、調整機構7は、シリンダロッド72に替えて、電動機で回転するねじ棒部材を設け、そのねじ棒部材の雄ねじ部に螺合する雌ねじ部を駆動架台6のブラケット62に形成して、ねじ棒部材を回転させることによって駆動架台6を上昇及び下降させるねじ機構を利用したものでもよい。
【0079】
また、調整機構7は、シリンダロッド72に替えて、先端にブラケット62を固定したラックを設け、そのラックを電動機で回転したピニオンによって進退させることにより、駆動架台6を上昇及び下降させるラックアンドピニオン機構等からなるものであっても構わない。
さらに、調整機構7は、シリンダロッド72(プランジャ)を電磁力で進退させる電磁ソレノイドであっても構わない。
【0080】
なお、前記流体圧シリンダ機構や、ねじ機構や、ラックアンドピニオン機構等の場合は、駆動するときに、瞬時に動力が駆動部に伝達されるので、そのときの急激な変動や衝撃力に対応するために、その変動がゆっくりとなるように、力センサー等によってシリンダロッド72の動きが柔軟になるように制御することが好ましい。
【符号の説明】
【0081】
1,1A 管内移動装置
2,2A,2B 車輪架台
3 車輪
4,4A 本体架台
4a,4Aa 前端部
4b,4Ab 後端部
5 駆動輪
6 駆動架台
7 調整機構
8 配管
8a 内壁
41 結合ピン(連結具)
51 駆動軸
52 従動車
61 駆動架台本体
62 ブラケット
63 調整板
71 シリンダ
72 シリンダロッド
81 管路
B ベルト
L1 本体架台と駆動架台との間隔
L2 車輪と駆動輪との間隔
M モータ
Ma モータ軸
Mb 原動車
T 駆動架台本体とブラケットとの間隔
【技術分野】
【0001】
本発明は、配管内を移動する管内移動装置に関する。
【背景技術】
【0002】
従来、港湾において、船舶で海上輸送した建設資材のコンクリート等を陸上の目的場所まで搬送する場合には、配管(パイプライン)を使用して搬送する方法が多く利用されている。その配管は、搬送するコンクリートによって内壁が腐食したり、コンクリートに含まれる砂や砂利によって内壁が損傷を受けたりする。その腐食や損傷を放置すると、管壁に穴があき、その穴からコンクリートが外部に漏れる事態へと進行する。
【0003】
この問題点を解消するためには、定期的に配管内の浸食具合を検査し、その浸食程度に応じて配管を補修する必要がある。現在、配管内壁の浸食検査は、検査者の経験により、浸食を受けていると推定される箇所を切断して浸食状況を確認し、その結果、配管の内壁に不良箇所が見つからなければ溶接によって切断した箇所を補修して復元している。
【0004】
このように、配管を切断したり、溶接して復元したりして配管内検査を実施する方法では、切断作業や溶接作業等の作業工数が加わり、作業効率の低下を招いていた。
そこで、従来、いきなり故障と思われる箇所を切断することなく、配管内を移動しながら配管内を検査したり、計測したりすることを可能にした管内移動装置が提案されている(例えば、特許文献1〜3参照)。
【0005】
特許文献1に記載の管内移動装置(配管内作業ロボット)は、大型の配管内を走行しながら配管の内壁面の補修塗装や欠陥検出や位置計測等を行う作業ロボットであり、作業用アームを有する走行台車と、塗料タンクを積載した作業台車と、を連結してなる。
【0006】
特許文献2に記載の管内移動装置(管内移動体)は、エアタンクとゴム車輪とによりマンホール内の水面に浮上して、先端にゴム車輪を設けた開閉脚が伸縮エアシリンダの駆動で開閉することと、水流とによって移動するようになっている。
【0007】
特許文献3に記載の管内移動装置(配管内移動機構)は、車輪を回転させるモータを内設した2つの構造物間に、2つの構造物を互いに離反させる板ばねを設けて、車輪を配管の内壁面に圧接させながら配管内を移動させる装置である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開平5−68917号公報(図1)
【特許文献2】特開平7−112169号公報(図1)
【特許文献3】特開平9−11890号公報(図1及び請求項1)
【発明の概要】
【発明が解決しようとする課題】
【0009】
前記特許文献1〜3に記載されたような管内移動装置が移動する配管には、水平な管路、垂直な管路、直角に曲がったエルボの管路、内径が段差状に変化するレデューサー等の種々の形状の管路があるため、管内移動装置は、あらゆる形状の管路に対応して自由に移動可能であることが望まれている。
【0010】
しかし、特許文献1に記載の管内移動装置は、任意の配管径の位置に対して設定可能としているものの、塗装用スプレイノズルやブラスト装置を備えた作業アームを搭載して走行する走行台車と、燃料タンクを搭載した作業台車と、を連結してなる大型の作業ロボットである。このため、特許文献1の管内移動装置が移動する配管は、コンクリート移送用配管と比較してより内径の大きい配管が対象になる。
【0011】
このような大型の配管内作業ロボットは、全体の重量が重いため、水平に配置された大径の配管内の下側内壁上を走行車輪が転動して走行する場合にしか利用することができず、配管内で作業ロボットの上下方向の向きが反転するような場所では使用できない。
つまり、配管内作業ロボットは、走行車輪側が上側になった場合、作業アームや加圧ローラ等によって走行台車及び作業台車を支えることが可能な強度を有していないため、上下の向きを逆様にして使用するような情況は考慮されていない。
【0012】
また、特許文献2に記載の管内移動装置は、先端にゴム車輪を設けた開閉脚が、伸縮エアシリンダの駆動で開閉して移動するため、移動速度が遅く、作業効率は高くない。
【0013】
また、特許文献3に記載の管内移動装置は、車輪を備えた複数の構造体の間に、その複数の構造物を互いに離反する方向に付勢させる板ばねを設けて、板ばねのばね力によって車輪を配管の内壁に押し付けながら回転させて、管路内を走行する。
しかしながら、その管内移動装置は、板ばねの弾性変形を利用して複数の構造物を互いに離反させているので、板ばねの変形量が小さく、離反させることが可能な距離も僅かであるため、2インチ以下の小口径配管が対象になっている。
【0014】
このような板ばねによって車輪を配管の内壁に押し付ける管内移動装置は、車輪の伸縮が僅かであるので、レデューサー等の内径が大きく変わる管路に対しては管内移動装置を走行させるのに必要な押付力は確保し難く、配管の内径が大きく変化する管路では走行させることが困難であった。
【0015】
そこで、本発明は、前記実情に鑑み創案されたものであり、内径が大きく変化した配管や、湾曲した配管や、エルボ状に直角に曲がった配管等の管路内であっても、スムーズに移動させることが可能な管内移動装置を提供することを課題とする。
【課題を解決するための手段】
【0016】
前記課題を解決するために、請求項1に記載の管内移動装置は、配管内を移動する管内移動装置であって、車輪を備えた車輪架台と、前記車輪架台の上に支持された本体架台と、モータによって回転駆動される駆動輪と、前記本体架台に相対して配置されると共に、前記駆動輪が回転自在に配置された駆動架台と、前記本体架台と前記駆動架台との間に介在させて、前記本体架台と前記駆動架台との間隔を調整する調整機構と、を備えており、前記調整機構は、前記管内移動装置が配管内を走行する際に、前記配管の内径の大きさに合わせて前記本体架台と前記駆動架台との間隔を広げる方向に常に付勢して、前記車輪と前記駆動輪とを前記配管の内壁に押し当てることを特徴とする。
【0017】
かかる構成によれば、管内移動装置は、内径の大きさが変化する配管内を移動する場合に、調整機構が常に本体架台と駆動架台とを離間させる方向に付勢しているので、車輪架台を備えた本体架台と駆動輪を備えた駆動架台との間隔が自動的に調整されて、車輪及び駆動輪の外周面を配管の内壁にそれぞれ適切な押付力で押し当て、モータが回転すると、駆動輪の外周面と配管の内壁との間の摩擦力によって推進力が発生し、配管内を走行移動することができる。
【0018】
請求項2に記載の管内移動装置は、請求項1に記載の管内移動装置であって、前記調整機構は、前記本体架台または前記駆動架台の一方に基端部が固定されたシリンダと、前記本体架台または前記駆動架台の他方に先端部が固定され、前記シリンダによって進退するシリンダロッドと、を備えていることを特徴とする。
【0019】
かかる構成によれば、管内移動装置は、調整機構のシリンダロッドが、シリンダによって駆動して進退すると、車輪が配置された本体架台と、駆動輪が配置された駆動架台との間隔を自動的に調整できるので、車輪及び駆動輪を配管の内壁に適度な押付力で押し当てることができる。このため、駆動輪が転動すれば、管内移動装置は、管路内を移動する。
【0020】
請求項3に記載の管内移動装置は、請求項1または請求項2に記載の管内移動装置であって、前記車輪架台は、前記本体架台に対して連結具によって水平方向に回動自在に連結されていることを特徴とする。
【0021】
かかる構成によれば、管内移動装置は、車輪架台が本体架台に対して回動自在に連結されていることによって、カーブしている管路を走行する際に、車輪の側面が配管の内壁に当接してその内壁に押し付けられると、車輪架台が車輪と共に連結具を中心として本体架台に対して水平に回動するため、車輪の向きを管路のカーブに応じて自動的に方向変換させることができる。
【0022】
請求項4に記載の管内移動装置は、請求項1ないし請求項3のいずれか1項に記載の管内移動装置であって、前記車輪架台は、前記本体架台の下部中央部に水平方向に回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする。
【0023】
かかる構成によれば、車輪架台は、この車輪架台の前後左右に配置された4つの車輪によって安定した状態に支持されている。その本体架台は、下部中央部に車輪架台が回動自在に配置されていることによって、走行中に、車輪の側面がカーブしている配管の壁面に押し当ると、配管の内壁面にガイドされて車輪架台を配管が曲がっている方向に回動させて、車輪架台と共に回動して車輪の向きが変わる。このため、管内移動装置は、移動する方向を管路の曲がり具合に合わせて自由に方向変換することができるので、曲がっている管路であっても、スムーズに移動することが可能となる。
【0024】
請求項5に記載の管内移動装置は、請求項1ないし請求項3のいずれか1項に記載の管内移動装置であって、前記車輪架台は、前記本体架台の下部の前端部及び後端部にそれぞれ回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする。
【0025】
かかる構成によれば、車輪架台は、前後左右に車輪が配置されていることによって、4つの車輪により安定した状態に支持されている。また、本体架台は、その車輪架台が下部の前端部及び後端部にそれぞれ配置された2台によって、合計8つの車輪が配管の内壁に押し付けられて管内移動装置を配管に対してガタツキなく支持するため、管内移動装置の移動を安定化させることができる。その2台の車輪架台は、それぞれ本体架台に回動自在に配置されているので、管内移動装置がカーブした管路を走行する際には前後の車輪架台の向きが自由に方向変換できるため、曲がっている管路であっても、スムーズに移動することができる。
【0026】
請求項6に記載の管内移動装置は、請求項1ないし請求項5のいずれか1項に記載の管内移動装置であって、前記駆動輪には、前記駆動架台に回転自在に配置され前記駆動輪が軸着された駆動軸と、前記駆動軸に軸着された従動車と、前記モータのモータ軸に軸着された原動車と、が設けられ、前記従動車と前記原動車とは、ベルトまたはチェーンからなる駆動機構によって回転が伝達されることを特徴とする。
【0027】
かかる構成によれば、管内移動装置は、駆動輪が、駆動架台の中央部外側に配置されていることによって、その駆動輪が1つであっても、モータが回転すれば、駆動輪が配管の内壁面に当接しながら転動して管内移動装置が移動する。
【0028】
請求項7に記載の管内移動装置は、請求項1ないし請求項6のいずれか1項に記載の管内移動装置であって、前記駆動架台は、前記モータが配置された駆動架台本体と、前記本体架台の前端部及び後端部に載設された一対の前記調整機構のシリンダロッドの先端部に設置された一対のブラケットと、前記駆動架台本体と前記一対のブラケットとの間に介在されて、前記駆動架台本体と前記ブラケットとの間隔を調整する調整板と、備えていることを特徴とする。
【0029】
かかる構成によれば、管内移動装置は、駆動架台本体と一対のブラケットとの間に、高さを調整する調整板がそれぞれ介在されていることによって、調整板の厚さ分だけ駆動架台本体及び駆動輪の位置を厚さ方向に調整することができる。
【発明の効果】
【0030】
本発明の請求項1に係る管内移動装置によれば、内径の大きさが変化するレデューサー等の配管内を移動する場合、車輪と駆動輪との間隔制御が調整機構の駆動によって調整できることにより、車輪と駆動輪とを配管の内壁に常に適切な押付力を作用させることができる。このため、管内移動装置は、駆動輪を転動させれば、配管の内径が大きく変化する管路内であっても、管内移動装置を移動することができる。
【0031】
本発明の請求項2に係る管内移動装置によれば、管内移動装置は、調整機構によって本体架台と駆動架台との間隔を調整することにより、車輪と駆動輪との間隔も調整して、車輪及び駆動輪を配管の内壁に適度な押付力を加えることができる。このため、管内移動装置は、配管の内径が変化する管路内や、垂直に配置された管路や、傾斜した管路であっても、常時、車輪及び駆動輪を配管の内壁に圧接させてスムーズに走行移動することができる。
【0032】
本発明の請求項3に係る管内移動装置によれば、管内移動装置は、カーブしている管路を走行する際に、車輪の側面が配管の内壁に当接して内壁に押し付けられると、車輪架台が車輪と共に回動して、車輪の向きを管路のカーブに合わせて自動的に方向変換させて進行させることができる。このため、管内移動装置は、曲がった配管の管路や、直角に曲がったエルボ状の管路であっても、配管の曲がり状況に応じて車輪の向きを自動変換させてスムーズに移動することができる。
【0033】
本発明の請求項4に係る管内移動装置によれば、管内移動装置の本体架台は、前後左右に車輪を配置した車輪架台が、下部中央部に回動自在に配置されていることによって、車輪の側面が曲がっている配管の内壁に押し当ると、車輪が車輪架台と共に回動して車輪の向きが変わる。このため、管内移動装置は、曲がっている管路であっても、管路の曲がっている方向に車輪の向きが自動的に変わるので、スムーズに移動することができる。
【0034】
本発明の請求項5に係る管内移動装置によれば、管内移動装置は、本体架台の前端部及び後端部の下部に、前後左右に4つの車輪を備えた車輪架台がそれぞれ配置されていることによって、管内移動装置を安定した状態に保って移動することができる。
【0035】
本発明の請求項6に係る管内移動装置によれば、管内移動装置は、駆動輪が駆動架台の中央部外側に配置されていることによって、その駆動輪が1つであっても、安定した状態で移動することができる。
【0036】
本発明の請求項7に係る管内移動装置によれば、管内移動装置は、駆動架台本体とブラケットとの間隔を調整板で調整することによって、調整板の厚さ分だけ駆動架台本体及び駆動輪の位置を厚さ方向に調整して、駆動輪の外周面を適宜な押付力で配管の内壁に押し当てることができる。
【図面の簡単な説明】
【0037】
【図1】本発明の実施形態に係る管内移動装置を示す斜視図である。
【図2】本発明の実施形態に係る管内移動装置の車輪架台の拡大斜視図である。
【図3】本発明の実施形態に係る管内移動装置を示す概略図であり、内径が変化する管路内を移動するときの状態を示す。
【図4】本発明の実施形態に係る管内移動装置がエルボ内を移動するときの状態を示す概略図である。
【図5】本発明の実施形態に係る管内移動装置の変形例を示す斜視図である。
【図6】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、曲がった配管内を移動するときの状態を示す。
【図7】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、エルボ内を移動するときの状態を示す。
【図8】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、エルボ内を逆様の状態で移動するときの状態を示す。
【図9】本発明の実施形態に係る管内移動装置の変形例を示す概略図であり、配管の内径が変化する場所を移動するときの状態を示す。
【発明を実施するための形態】
【0038】
次に、図1〜図4を参照して本発明の実施形態に係る管内移動装置1を説明する。
なお、本実施形態において、管内移動装置1は、配管8を取り付ける場所や、配管8の設置状態によってその向きが変化する。このため、前後左右上下の方向は、任意であるが、便宜上、図1及び図2に示す図面の左側を「前」、右側を「後」、前側を「左」、後側を「右」、下側を「下」、上側を「上」として説明する。
管内移動装置1を説明する前に、この管内移動装置1が走行する配管8(図3参照)について説明する。
【0039】
≪配管の構成≫
図3に示すように、配管8は、管内移動装置1が移動可能な管状部材や筒状部材やトンネル状の管路81を有するものであればよく、その使用目的等は特に限定されない。この配管8は、内壁8aの状態を検査したり、計測したり、内壁8aを補修したりする必要性のあるものが対象である。配管8は、例えば、生コンクリート等の泥状の材料や、建設材料、合成樹脂、食品等の粉体や、粒子状の材料や、石油等の液体や、天然ガス等の気体を搬送するのに使用されるパイプライン等である。
【0040】
≪管内移動装置の構成≫
図1に示すように、管内移動装置1は、配管8(図3参照)内の管路81(図3参照)を前後方向に移動させながら配管8内の検査と補修等を行うための走行用ロボット(自走台車)である。管内移動装置1は、回転自在な車輪3と、この車輪3を備えた車輪架台2と、この車輪架台2が回動自在に連結された本体架台4と、管内移動装置1を走行させるための駆動輪5と、この駆動輪5を回転させる原動力を発生させるモータMと、モータMの回転を駆動輪5に伝達する駆動機構9と、駆動輪5が配置された駆動架台6と、駆動輪5の位置を調整するための調整機構7と、配管8内を検査する検査装置(図示省略)と、配管8の内壁8aを補修する補修装置(図示省略)と、モータM等を駆動させるための電源(図示省略)と、この電源等を制御する制御装置(図示省略)と、を備えている。
【0041】
≪車輪の構成≫
図2に示すように、車輪3は、車輪架台2に対して回転自在に配置された回転体であり、例えば、車輪架台2の前後左右に回転自在に配置された4つのローラからなる。各車輪3は、中心部に設置された車軸31に回転自在に軸支されて、管内移動装置1が移動すると配管8(図3参照)の内壁8aと摩擦で転動するように、その内壁8aに当接する状態に配置される。
車軸31は、基端部が、車輪架台2の下面の前後左右に固定された軸支部材22にそれぞれ固定され、各先端部が、各車輪3の中央部に設けられた軸受部(図示省略)に回転自在に軸支されている。
【0042】
≪車輪架台の構成≫
図2に示すように、車輪架台2は、複数(例えば、4つ)の車輪3の車軸31が配置された略厚板状の車輪用基台であり、例えば、車輪架台2の左右前後の外側に車輪3がそれぞれ配置されている。車輪架台2は、車輪架台本体21と、この車輪架台本体21の下面の左右前後に固定された軸支部材22と、車輪架台本体21の中央部に設置されたスラストブッシュ23と、軸支部材22及びスラストブッシュ23を車輪架台本体21に固定するための固定具24と、を備えている。この車輪架台2は、本体架台4の下部中央部に回動可能に配置されている。
【0043】
車輪架台本体21は、平らな矩形をした厚板部材からなり、中央部にスラストブッシュ23を挿入するための縦孔(図示省略)が板厚方向に向けて穿設されている。
軸支部材22は、車輪架台本体21の下面の左右前後から下側に向けて突出した状態に固定された厚板状の部材からなり、車軸31を軸支するための軸孔が穿設されている。
スラストブッシュ23は、車輪架台本体21の中央部に穿設された縦孔(図示省略)に挿入される筒部23aと、この筒部23aの上端部に形成されたフランジ部23bと、からなる。筒部23a内には、結合ピン41(図1参照)のねじ部41bが挿通される。フランジ部23bは、車輪架台本体21の盤面に固定具24によって固定される部位であり、鍔状に形成されている。
固定具24は、例えば、ねじ部材、あるいは、ボルト・ナット等からなる。
【0044】
≪本体架台の構成≫
図1に示すように、本体架台4は、管内移動装置1の本体フレームを構成する部材であり、例えば、前後方向に長い略帯状の平らな厚板部材からなる。この本体架台4には、結合ピン41が挿入される貫通孔4cと、前端部4a及び後端部4b上に載設された調整機構7のシリンダ71と、が設けられている。
【0045】
貫通孔4cは、結合ピン41の頭部41aが没入する段差部(図示省略)を有する孔からなり、本体架台4の中央部に穿設されている。
結合ピン41(連結具)は、本体架台4に対して、車輪架台2を回動自在に連結するための連結ピンであり、頭部41aと、ナット42が螺合されるねじ部41bと、が形成された段付きボルトからなる。なお、車輪架台2は、この結合ピン41を中心として水平方向(矢印A,B方向)に回動する。
【0046】
≪調整機構の構成≫
図1に示すように、調整機構7は、本体架台4とこの本体架台4に相対して配置された駆動架台6との間隔L1を広げる方向に常に付勢して、車輪3と駆動輪5とを配管8の内壁8aに押し当てる装置である。この調整機構7は、例えば、本体架台4の前端部4a及び後端部4bに設置されて同時に作動する一対の装置からなる。調整機構7は、本体架台4と駆動架台6との間に介在させて、本体架台4と駆動架台6との間隔L1を調整することによって、車輪3と駆動輪5とを配管8の内壁8aにそれぞれ押し当てる押付力、及び、車輪3と駆動輪5との間隔L2(図3参照)も調整することができる。
【0047】
調整機構7は、駆動架台6を本体架台4に対して上下方向に進退移動させるなどして、前記間隔L1,L2(図3参照)を調整できるものであればよく、その構造は特に限定されない。つまり、調整機構7は、例えば、流体圧シリンダ機構や、ねじ棒と雌ねじ部材と電動モータを利用したねじ機構や、ラックとピニオンと電動モータを利用したラックアンドピニオン機構等によって、シリンダロッド72を進退させてよい。以下、調整機構7は、空気圧シリンダからなる場合を例に挙げて説明する。
【0048】
図1に示すように、調整機構7は、基端部が本体架台4の前後端部上に固定されたシリンダ71と、先端部が駆動架台6に固定されて、シリンダ71によって進退するシリンダロッド72と、シリンダロッド72を駆動させるための不図示のエア供給源と、このエア供給源を制御する制御装置(図示省略)と、を備えた一対の空気圧シリンダからなる。
【0049】
シリンダ71は、本体架台4等に載設されたエア供給源(図示省略)から供給された圧縮空気によってシリンダロッド72を上昇あるいは下降(進退)する。
シリンダロッド72は、基端部がシリンダ71に内設され、先端部側が前後に配置されたブラケット62にそれぞれ固定されている。
不図示のエア供給源は、シリンダ71内に圧縮空気を供給してシリンダロッド72を上昇及び下降させる装置であり、例えば、空気圧縮機やモータポンプや電磁ポンプ等からなる。エア供給源は、調整機構7に内設するか、本体架台4に載設するか、あるいは、圧縮空気供給用のチューブを介して配管8の外部に配置されている。このエア供給源は、後記する制御装置(図示省略)によって制御される。
【0050】
≪駆動輪の構成≫
駆動輪5は、モータMの回転を駆動機構9を介して伝達させて駆動輪5を回転駆動させることによって、管内移動装置1を走行させる走行源であり、1つの電動車輪からなる。駆動輪5は、駆動架台6の中央部外側(上部中央)に回転自在に配置された駆動軸51と、この駆動軸51に軸着された従動車52と、が前記モータMによって一体に回転するようになっている。駆動輪5は、常時、配管8の内壁8aに、調整機構7の空気圧によって弾性的に押し付けられた状態に配置されている。
【0051】
図1に示すように、駆動軸51は、駆動輪5の中央部に挿通した状態に固定された回転軸であって、駆動輪5を支える回転伝達軸である。この駆動軸51は、その両端部が駆動架台本体61の左右端部に載設された一対の軸受部材64によって回転自在に軸支されて、左右方向に向けて配置されている。
従動車52は、駆動軸51の左端部に軸合されて、駆動架台6の中央部の軸受部材64の外側に配置されている。従動車52は、例えば、タイミングベルトからなるベルト91の歯形部が噛合する歯形部を有するスプロケットからなる。
【0052】
≪モータの構成≫
モータMは、駆動輪5を回転させるための駆動源であり、駆動架台本体61の下面中央部にモータ軸Maを左右方向に向けて配置されている。モータMは、このモータMに設けられたモータ軸Maと、モータ軸Maに軸着された原動車Mbと、モータ軸Maを回転自在に軸支したモータケースMcと、を有している。
モータ軸Maは、前記駆動軸51に対して平行に配置されている。
原動車Mbは、前記従動車52と同様に、ベルト91が巻き掛けられてベルト91の歯形部が噛合する歯形部を有するスプロケットからなる。
モータケースMcは、左右端部が、駆動架台本体61の下面から垂下した一対のモータ保持板65によって保持されている。
【0053】
≪駆動機構の構成≫
駆動機構9は、モータMの回転を駆動輪5に伝達して回転駆動させるための伝達装置であり、原動車Mbと従動車52とに巻き掛けられた無端のベルト91を備えている。
ベルト91は、原動車Mbの回転を従動車52へ伝達できるものであればよく、チェーンであっても構わない。
【0054】
≪駆動架台の構成≫
図1に示すように、駆動架台6は、駆動輪5及びモータMを支持し、調整機構7によって上昇及び下降(進退)する板状部材であり、前後端部がシリンダロッド72で水平に保持されている。駆動架台6は、モータMが配置された駆動架台本体61と、一対の調整機構7のシリンダロッド72の上端部(先端部)に設置された一対のブラケット62と、駆動架台本体61と一対のブラケット62との間にそれぞれ介在させてブラケット62に対する駆動架台本体61の高さを調節するための一対の調整板63と、前記軸受部材64と、前記モータ保持板65と、を備えてなる。
【0055】
駆動架台本体61は、モータM及び駆動輪5が設置されるベース状の厚板部材である。
ブラケット62は、駆動架台本体61の前後に配置されて、シリンダロッド72によって常に押圧されている厚板部材である。
調整板63は、駆動架台本体61とブラケット62との間隔Tを調整するための板部材である。この調整板63は、厚さの相違する板部材や、複数の板部材を駆動架台本体61とブラケット62との間に介在させることによって、間隔Tを調整する。
軸受部材64は、駆動軸51を駆動輪5の両側から軸支する一対の厚板状の部材であり、互いに駆動輪5を介して平行に対向して駆動架台本体61に載設されている。
モータ保持板65は、モータMのモータ軸Maの両端側から挟持するようにして保持する一対の板部材からなる。
【0056】
≪検査装置及び補修装置の構成≫
不図示の検査装置は、図3に示す配管8の内壁8aを検査する装置であって、例えば、撮像カメラ装置や、赤外線カメラ装置や、配管8の内径Dや、寸法を計測する計測装置等からなる。この検査装置は、駆動架台6または本体架台4に載設されている。
不図示の補修装置は、腐食したり、損傷を受けたりした配管8の内壁8aを補修する装置であり、例えば、溶接ロボットや、塗装ロボットや、ロボットアーム等からなる。この補修装置は、駆動架台6または本体架台4に載設されている。
【0057】
≪電源の構成≫
不図示の電源は、モータMや検査装置や補修装置や制御装置や調整機構7等を駆動させるための装置であり、バッテリあるいは発電機からなる。電源は、管内移動装置1に搭載されるか、あるいは、電線を介して配管8の外部に配置されている。
【0058】
≪制御装置の構成≫
不図示の制御装置は、モータM、調整機構7、検査装置及び補修装置を制御する装置であり、管内移動装置1に搭載されて、配管8の外部に配置された遠隔コントローラ(図示省略)によって遠隔操作されるようになっている。この場合、制御装置と遠隔コントローラ(リモコン)との間は、電線によって接続するか、または、無線によって制御信号が送受信されるようになっている。なお、遠隔コントローラには、モータM、調整機構7、検査装置及び補修装置を遠隔操作する装置と、カメラ等からなる検査装置で撮像した映像を映し出すモニタが備えられている。
【0059】
≪作用≫
次に、図1〜図4を参照しながら、管内移動装置1の作用を説明する。
図3に示すように、管内移動装置1を配管8内の管路81を走行させる場合は、まず、管内移動装置1を配管8内に配置する。次に、作業者は、不図示の遠隔コントローラを操作して、制御装置(図示省略)を作動させて調整機構7を駆動させる。そして、調整機構7の左右のシリンダ71内に圧縮空気を送り込んでシリンダロッド72を上昇させて、駆動架台6及び駆動輪5を上昇させ、駆動輪5を配管8の内壁8aに常に押し当てる。
【0060】
シリンダロッド72が延びることにより、シリンダ71が固定された本体架台4と、シリンダロッド72が固定された駆動架台6との間隔L1(図1参照)が広がり、車輪3と駆動輪5との間隔L2も広がる。
このように、調整機構7のシリンダロッド72は、空気圧によってシリンダ71から突出すると、配管8の内径Dの大きさに応じて進退し、前記空気圧に比例した押付力で、車輪3及び駆動輪5を弾性的に配管8の内壁8aに押し当てる。
【0061】
このため、管内移動装置1は、配管8が垂直配置されている場合や、配管8が傾斜配置されている場合であっても、車輪3と駆動輪5とがそれぞれ配管8の内壁8aに押し付けられるので、車輪3及び駆動輪5の外周面と、配管8の内壁8aとの摩擦で、滑り落ちることなく配管8内に支持される。
【0062】
例えば、モータMを正転させれば、モータMの回転が、モータ軸Maから原動車Mb、ベルト91、従動車52、駆動軸51へと伝達されて、駆動輪5が配管8の内壁8aに当接した状態で回転し、駆動輪5の外周面と配管8の内壁8aとの間の摩擦力によって推進力が発生して管内移動装置1が前進する。そして、モータMを反転させれば、前進とは駆動輪5等が反対方向へ回転して、管内移動装置1が後退する。
【0063】
図3に示すように、配管8の内径Dの大きさが、場所によって変化するレデューサー等の管路81内を管内移動装置1が移動する場合、例えば、その配管8の内径Dが長さD1分だけ小さくなる方向(前側)へ移動すると、駆動輪5と、駆動輪5と一体に径方向に移動する駆動架台6及びシリンダロッド72とが、長さD1分だけ配管8の中心方向へ移動して、シリンダロッド72が高さH分だけ押し込まれて変動する。
【0064】
また、管内移動装置1が、例えば、配管8の内径Dが長さD2分だけ大きくなる方向(後側)へ移動すると、駆動輪5、駆動架台6及びシリンダロッド72とが、長さD2分だけ径外方向へ移動して、シリンダロッド72が高さH分だけ圧縮空気によって押し上げられて変動する。
【0065】
したがって、管内移動装置1は、配管8の内径Dの大きさが変化する管路81であっても、車輪3と駆動輪5との間隔L2が変動して配管8の内径Dの変化に対応するため、スムーズに移動させることが可能である。
【0066】
なお、配管8の内径Dが調整機構7の調整可能範囲を越えて変化する場合、例えば、前記した長さD1の長さ分よりもさらに縮径して小さい場合には、図1に示す調整板着脱ねじ部材66を取り外して、駆動架台本体61と左右のブラケット62との間に配置された調整板63を厚さの大きい板材に変更するか、あるいは、調整板63を複数枚介在させることによって、調整機構7の調整可能範囲内におさめることができる。このようにして、調整板63の厚さをさらに厚くすると、駆動架台本体61、モータM、駆動機構9及び駆動輪5の位置が、その変更した厚さ分だけ、下側(本体架台4側)へ移動するため、本体架台4と駆動架台6の間隔L1、及び車輪3と駆動輪5との間隔L2(図3参照)を小さく調整することができる。
【0067】
また、配管8と配管8との繋ぎ目や、溶接等によって内壁8a面に凹凸が形成された箇所を管内移動装置1が走行する場合は、走行中に、車輪3,3あるいは駆動輪5がその凹凸に当接すると、管内移動装置1が急激に小さく上下方向に変動する。この変動や、変動したときの衝撃は、シリンダ71が空気圧シリンダから構成されていることによって、空気の圧縮性により吸収して緩和させることができる。
【0068】
なお、その場合は、例えば、エアタンクあるいはコンプレッサのエア供給口に圧力調整弁を設置して、この圧力調整弁を介してシリンダ71にエアが供給されるようにしてもよい。このようにすることによって、ゆっくりした変動や急激な変動があったとしても、シリンダ71の動きをその変動(変化)に対応させて適宜に調整させることが可能になる。
【0069】
また、図4に示すように、管内移動装置1は、調整機構7のシリンダロッド72のシリンダ71から飛び出ている長さと、調整板63の厚さとを適宜に調整することによって、配管8の内径Dの大きさに合わせて駆動輪5の位置を径方向に伸縮させて、車輪3及び駆動輪5を配管8の内壁8aに押し当てることができる。
【0070】
このとき、管内移動装置1は、側面視して上下中央部に配置した駆動輪5と一対の車輪3とで配管8の内壁8aに三点支持されて安定した状態に支持されている。このため、管内移動装置1は、図4に示すような直角に曲がった曲率の小さいエルボ82内や、カーブ状に曲がった配管8内や、管内移動装置1が天地の方向が逆になって逆様の状態で管路81を移動するときであっても、駆動輪5及び車輪3の外周面が、常に内壁8aに押し当てられた状態になるので、モータMを回転させれば、モータMに連動する駆動輪5によって、管路81内を自由に走行させることができる。
【0071】
また、図1及び図2に示すように、車輪3を備えた車輪架台2は、結合ピン41を中心として、左右の水平方向(矢印A及びB方向)に回動自在に設置されているので、配管8内の管路81が水平方向にカーブしている場合であっても、車輪3の側面が内壁8aに押し付けられて、その管路81の形状に応じて自然に車輪3の向きが走行方向を向くため、スムーズに走行することができる。
【0072】
[変形例]
なお、本発明は、前記実施形態に限定されるものではなく、その技術的思想の範囲内で種々の改造および変更が可能であり、本発明はこれら改造および変更された発明にも及ぶことは勿論である。
次に、図5〜図9を参照しながら前記実施形態の変形例を説明する。なお、既に説明した構成は同じ符号を付してその説明を省略する。
【0073】
前記実施形態では、管内移動装置1の本体架台4の下に、1つの車輪架台2を配置した場合を例に挙げて説明したが、これに限定されるものではない。
例えば、図5に示すように、管内移動装置1Aは、本体架台4Aの下部の前端部4Aa及び後端部4Abに、4つの車輪3を備えた車輪架台2A,2Bの2つのユニットを回動自在に軸支してもよい。
【0074】
このように、管内移動装置1Aは、自由に回転する2つの車輪架台2A,2Bを備えたことによって、図6に示すように、エルボ82からなる配管8内の管路81を走行するときに、曲がったエルボ82の内壁8aに車輪3の側面が当接することにより、2つの車輪架台2A,2Bの向きが、それぞれ走行する管路81の走行方向を向いて、「く」の字状に曲がった状態になる。このため、管内移動装置1Aは、たとえ、管内移動装置1Aの前後方向の全体の長さが長くなったとしても、エルボ82のように略直角に曲がった管路81内を、スムーズに移動できるようになる。
【0075】
前後に2つの車輪架台2A,2Bを備えた管内移動装置1Aの場合は、前後方向の長さが長くなるため、図7及び図8に示すように、上下方向に曲率の小さいエルボ状に曲がった管路81を移動するときに、側面視して、4つある車輪3の中央部側の2つの車輪3、または、前後側の2つの車輪3のみが内壁8aに当接するようになる。
このような管内移動装置1Aの場合は、全体の高さL2(図9参照)が低いことが望ましい。
なお、管内移動装置1Aは、パイプライン等からなる配管8に使用する場合、密度の高い物体を輸送するため、配管8の曲率が大きく、問題になることはない。
【0076】
図9に示すように、2つの車輪架台2A,2Bを備えた管内移動装置1Aは、配管8の内径Dが大きく変化する場合であっても、前記実施形態と同様に調整機構7によって、車輪3と駆動輪5との間隔L2が、配管8の内径Dの大きさに応じて調整可能である。この場合、管内移動装置1Aは、前記実施形態の管内移動装置1と比較して、前後方向の長さL3が、車輪3が本体架台4Aの前端部4Aa及び後端部4Abからはみ出した分(L4,L4)だけ長くなっているため、前後の車輪3間のその長さL3が長くなった分だけ、走行性が安定化する。
なお、その長さL3に合わせて本体架台4A及び駆動架台6の前後方向の長さを長くすれば、種々の検査装置(図示省略)や補修装置(図示省略)を積載する設置スペースをさらに拡大させることができる。
【0077】
[その他の変形例]
なお、前記調整機構7は、シリンダロッド72が圧縮空気によって上昇及び下降するエアシリンダからなる場合を説明したが、これに限定されるものではない。
つまり、調整機構7は、シリンダロッド72を本体架台4に対して伸縮させて、常に駆動架台6及び駆動輪5を離間させる方向に付勢させて、駆動輪5及び車輪3を配管8の内壁8aに押圧させるものであればよい。
例えば、調整機構7は、シリンダ71内に高圧のガスを封入し、略一定なばね力でピストンロッドを弾出させて駆動架台6を押圧することによって、駆動輪5を配管8の内壁8aに押圧させるガススプリングであっても構わない。
【0078】
あるいは、調整機構7は、油圧等の流体圧を利用してシリンダロッド72を進退させることによって駆動架台6を移動させる流体圧シリンダ機構であってもよい。
また、調整機構7は、シリンダロッド72に替えて、電動機で回転するねじ棒部材を設け、そのねじ棒部材の雄ねじ部に螺合する雌ねじ部を駆動架台6のブラケット62に形成して、ねじ棒部材を回転させることによって駆動架台6を上昇及び下降させるねじ機構を利用したものでもよい。
【0079】
また、調整機構7は、シリンダロッド72に替えて、先端にブラケット62を固定したラックを設け、そのラックを電動機で回転したピニオンによって進退させることにより、駆動架台6を上昇及び下降させるラックアンドピニオン機構等からなるものであっても構わない。
さらに、調整機構7は、シリンダロッド72(プランジャ)を電磁力で進退させる電磁ソレノイドであっても構わない。
【0080】
なお、前記流体圧シリンダ機構や、ねじ機構や、ラックアンドピニオン機構等の場合は、駆動するときに、瞬時に動力が駆動部に伝達されるので、そのときの急激な変動や衝撃力に対応するために、その変動がゆっくりとなるように、力センサー等によってシリンダロッド72の動きが柔軟になるように制御することが好ましい。
【符号の説明】
【0081】
1,1A 管内移動装置
2,2A,2B 車輪架台
3 車輪
4,4A 本体架台
4a,4Aa 前端部
4b,4Ab 後端部
5 駆動輪
6 駆動架台
7 調整機構
8 配管
8a 内壁
41 結合ピン(連結具)
51 駆動軸
52 従動車
61 駆動架台本体
62 ブラケット
63 調整板
71 シリンダ
72 シリンダロッド
81 管路
B ベルト
L1 本体架台と駆動架台との間隔
L2 車輪と駆動輪との間隔
M モータ
Ma モータ軸
Mb 原動車
T 駆動架台本体とブラケットとの間隔
【特許請求の範囲】
【請求項1】
配管内を移動する管内移動装置であって、
車輪を備えた車輪架台と、
前記車輪架台の上に支持された本体架台と、
モータによって回転駆動される駆動輪と、
前記本体架台に相対して配置されると共に、前記駆動輪が回転自在に配置された駆動架台と、
前記本体架台と前記駆動架台との間に介在させて、前記本体架台と前記駆動架台との間隔を調整する調整機構と、を備えており、
前記調整機構は、前記管内移動装置が配管内を走行する際に、前記配管の内径の大きさに合わせて前記本体架台と前記駆動架台との間隔を広げる方向に常に付勢して、前記車輪と前記駆動輪とを前記配管の内壁に押し当てることを特徴とする管内移動装置。
【請求項2】
前記調整機構は、前記本体架台または前記駆動架台の一方に基端部が固定されたシリンダと、
前記本体架台または前記駆動架台の他方に先端部が固定され、前記シリンダによって進退するシリンダロッドと、を備えていることを特徴とする請求項1に記載の管内移動装置。
【請求項3】
前記車輪架台は、前記本体架台に対して連結具によって水平方向に回動自在に連結されていることを特徴とする請求項1または請求項2に記載の管内移動装置。
【請求項4】
前記車輪架台は、前記本体架台の下部中央部に水平方向に回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする請求項1ないし請求項3のいずれか1項に記載の管内移動装置。
【請求項5】
前記車輪架台は、前記本体架台の下部の前端部及び後端部にそれぞれ回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする請求項1ないし請求項3のいずれか1項に記載の管内移動装置。
【請求項6】
前記駆動輪には、前記駆動架台に回転自在に配置され前記駆動輪が軸着された駆動軸と、
前記駆動軸に軸着された従動車と、
前記モータのモータ軸に軸着された原動車と、が設けられ、
前記従動車と前記原動車とは、ベルトまたはチェーンからなる駆動機構によって回転が伝達されることを特徴とする請求項1ないし請求項5のいずれか1項に記載の管内移動装置。
【請求項7】
前記駆動架台は、前記モータが配置された駆動架台本体と、
前記本体架台の前端部及び後端部に載設された一対の前記調整機構のシリンダロッドの先端部に設置された一対のブラケットと、
前記駆動架台本体と前記一対のブラケットとの間に介在されて、前記駆動架台本体と前記ブラケットとの間隔を調整する調整板と、備えていることを特徴とする請求項1ないし請求項6のいずれか1項に記載の管内移動装置。
【請求項1】
配管内を移動する管内移動装置であって、
車輪を備えた車輪架台と、
前記車輪架台の上に支持された本体架台と、
モータによって回転駆動される駆動輪と、
前記本体架台に相対して配置されると共に、前記駆動輪が回転自在に配置された駆動架台と、
前記本体架台と前記駆動架台との間に介在させて、前記本体架台と前記駆動架台との間隔を調整する調整機構と、を備えており、
前記調整機構は、前記管内移動装置が配管内を走行する際に、前記配管の内径の大きさに合わせて前記本体架台と前記駆動架台との間隔を広げる方向に常に付勢して、前記車輪と前記駆動輪とを前記配管の内壁に押し当てることを特徴とする管内移動装置。
【請求項2】
前記調整機構は、前記本体架台または前記駆動架台の一方に基端部が固定されたシリンダと、
前記本体架台または前記駆動架台の他方に先端部が固定され、前記シリンダによって進退するシリンダロッドと、を備えていることを特徴とする請求項1に記載の管内移動装置。
【請求項3】
前記車輪架台は、前記本体架台に対して連結具によって水平方向に回動自在に連結されていることを特徴とする請求項1または請求項2に記載の管内移動装置。
【請求項4】
前記車輪架台は、前記本体架台の下部中央部に水平方向に回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする請求項1ないし請求項3のいずれか1項に記載の管内移動装置。
【請求項5】
前記車輪架台は、前記本体架台の下部の前端部及び後端部にそれぞれ回動自在に配置されると共に、前記車輪架台の前後左右に前記車輪が回転自在に配置されていることを特徴とする請求項1ないし請求項3のいずれか1項に記載の管内移動装置。
【請求項6】
前記駆動輪には、前記駆動架台に回転自在に配置され前記駆動輪が軸着された駆動軸と、
前記駆動軸に軸着された従動車と、
前記モータのモータ軸に軸着された原動車と、が設けられ、
前記従動車と前記原動車とは、ベルトまたはチェーンからなる駆動機構によって回転が伝達されることを特徴とする請求項1ないし請求項5のいずれか1項に記載の管内移動装置。
【請求項7】
前記駆動架台は、前記モータが配置された駆動架台本体と、
前記本体架台の前端部及び後端部に載設された一対の前記調整機構のシリンダロッドの先端部に設置された一対のブラケットと、
前記駆動架台本体と前記一対のブラケットとの間に介在されて、前記駆動架台本体と前記ブラケットとの間隔を調整する調整板と、備えていることを特徴とする請求項1ないし請求項6のいずれか1項に記載の管内移動装置。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】

【図7】

【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−246033(P2011−246033A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−122516(P2010−122516)
【出願日】平成22年5月28日(2010.5.28)
【出願人】(000125369)学校法人東海大学 (352)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月28日(2010.5.28)
【出願人】(000125369)学校法人東海大学 (352)
[ Back to top ]