
管制装置、航空機、及び管制方法

【課題】目標に対する射撃を行うための火器管制を効率良く行うことを目的とする。
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、管制装置、航空機、及び管制方法に関するものである。
【背景技術】
【0002】
目標に対する射撃及び捜索追尾が可能な航空機は、捜索追尾している目標に対して射撃を行う場合がある。
このような、航空機の一例として、特許文献1には、アクティブな目標捜索追尾装置と、電磁波を放射することなく目標を捜索追尾できるパッシブな目標捜索追尾装置と、を統合して用いることで、目標を捜索追尾し、目標に対して射撃を行う航空機が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3736112号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、編隊飛行している複数の航空機が、自機の目標に対する捜索追尾の結果に基づいて、各々の判断で射撃を行う目標を決定すると、目標が重複したり、射撃の対象から漏れる目標が生じる可能性がある。また、複数の航空機が、各々の判断で捜索追尾を行う目標を決定すると、目標が複数存在する場合等には、捜索追尾から漏れる目標が生じる可能性がある。
このように、複数の航空機が目標に対する射撃や射撃のための捜索追尾を行う場合に、効率的な火器管制が行われない場合があった。
【0005】
本発明は、このような事情に鑑みてなされたものであって、目標に対する射撃を行うための火器管制を効率良く行うことができる管制装置、航空機、及び管制方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の管制装置、航空機、及び管制方法は以下の手段を採用する。
【0007】
すなわち、本発明に係る管制装置は、一又は複数の目標に対する射撃及び捜索追尾が可能な航空機に搭載される管制装置であって、一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する受信手段と、前記受信手段によって受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う割当手段と、自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当手段によって割り当てられた目標に関する情報を他の前記航空機へ送信する送信手段と、を備える。
【0008】
本発明によれば、航空機は、一又は複数の目標に対する射撃及び捜索追尾が可能とされている。
そして、受信手段によって、一又は複数の他の航空機から、他の航空機の移動に関する情報である移動情報及び他の航空機が捜索追尾によって取得した目標の移動に関する情報である目標情報が受信され、送信手段によって、自機の移動情報及び自機が捜索追尾によって取得した目標情報が他の航空機へ送信される。
【0009】
なお、他の航空機とは、自機の僚機である。
目標とは、例えば、脅威となる航空機、脅威となる飛しょう体、脅威となる車両、及び脅威となる地上設備等である。また、目標に対する射撃とは、航空機が搭載している、例えば機関砲及び飛しょう体であるミサイル等の火器を目標に対して用いることをいう。
航空機(他の航空機、自機)の移動情報とは、例えば、航空機の位置、航空機の速度、航空機の加速度、及び航空機の機首が向いている方位等である。また、航空機が捜索追尾によって取得した目標情報とは、例えば、目標の位置、目標の速度、及び目標の加速度等である。
【0010】
そして、割当手段によって、受信手段で受信した他の航空機の移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び他の航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理が行われる。割当手段によって割り当てられた目標に関する情報は、他の航空機へ送信手段によって送信される。
【0011】
すなわち、割当処理とは、自機及び僚機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる処理であり、割当処理によって、複数の航空機が同一の目標を射撃することを防ぐことができると共に、射撃の対象から漏れる目標の発生を防ぐことができる。また、割当処理によって、捜索追尾の対象から漏れる目標の発生を防ぐことができる。
なお、割当処理によって、射撃の対象となる目標及び捜索追尾の対象となる目標が割り当られない航空機が発生してもよいし、射撃の対象となる目標と捜索追尾の対象となる目標両方が割り当られる航空機が発生してもよい。
従って、本発明は、目標に対する射撃を行うための火器管制を効率良く行うことができる。
【0012】
また、本発明の管制装置は、前記割当処理を行う航空機が、複数の前記航空機のうち、定められた一機であり、該定められた一機は変更可能とされてもよい。
【0013】
本発明によれば、割当処理を行う航空機を定めることによって、火器管制を効率よく行え、割当処理を行う航空機が変更可能とされることによって、割当処理を行っていた航空機が離脱しても、新たな航空機が割当処理を行うため、火器管制が中断することを防ぐことができる。
【0014】
また、本発明の管制装置は、前記割当手段が、目標に対する射撃として飛しょう体の発射が行われ、発射された該飛しょう体が定められた目標へ到達できない場合、該飛しょう体の該定められた目標を他の目標へ変更してもよい。
【0015】
本発明によれば、例えば、飛しょう体の発射後、目標が離脱し、飛しょう体の射程距離内に位置しなくなる等、飛しょう体が該目標へ到達できない場合、該飛しょう体の目標を他の目標へ変更させるので、発射された飛しょう体が無駄となることを抑制することができる。
【0016】
また、本発明の管制装置は、前記飛しょう体が、前記航空機との間で該飛しょう体の位置を示す位置情報の送信及び前記目標の位置を示す情報の受信が可能とされてもよい。
【0017】
本発明によれば、飛しょう体と割当処理を行う航空機との間で、飛しょう体の位置情報及び目標情報の送受信が可能となるので、効率良く飛しょう体の目標の変更が可能となる。
【0018】
また、本発明の管制装置は、前記割当手段が、目標と各前記航空機との距離に応じて、射撃の対象となる目標を自機及び他の前記航空機に対して割り当ててもよい。
【0019】
本発明によれば、簡易かつ効果的に、射撃の対象となる目標を自機及び他の航空機に対して割り当てることができる。
【0020】
また、本発明の管制装置は、前記割当手段が、目標と各前記航空機との距離及び前記航空機が有する捜索追尾の能力に応じて、捜索追尾の対象となる目標を自機及び他の前記航空機に対して割り当ててもよい。
【0021】
本発明によれば、簡易かつ効果的に、捜索追尾の対象となる目標を自機及び他の航空機に対して割り当てることができる。
【0022】
また、本発明の管制装置は、前記受信手段によって受信された、他の前記航空機から送信された前記目標情報に基づいて、自機で捜索追尾した目標と共に他の前記航空機で捜索追尾した目標を表示する表示手段を備えてもよい。
【0023】
本発明によれば、他の航空機のパイロットとの間で、目標に対する情報の共有化が可能となる。
【0024】
一方、本発明に係る航空機は、一又は複数の目標に対する射撃を行う射撃装置と、目標を捜索追尾する捜索追尾装置と、上記記載の管制装置と、を備える。
【0025】
本発明によれば、上記記載の管制装置を備えるので、目標に対する射撃を行うための火器管制を効率良く行うことができる。
【0026】
さらに、本発明に係る管制方法は、一又は複数の目標に対する射撃及び捜索追尾が可能な航空機の管制方法であって、一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する第1工程と、受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う第2工程と、自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当処理によって割り当てられた目標に関する情報を他の前記航空機へ送信する第3工程と、を含む。
【0027】
本発明によれば、割当処理によって、複数の僚機が同一の目標を射撃することを防ぐことができると共に、射撃の対象から漏れる目標の発生を防ぐことができる。また、割当処理によって、捜索追尾の対象から漏れる目標の発生を防ぐことができる。
従って、本発明は、目標に対する射撃を行うための火器管制を効率良く行うことができる。
【発明の効果】
【0028】
本発明によれば、目標に対する射撃を行うための火器管制を効率良く行うことができる、という優れた効果を有する。
【図面の簡単な説明】
【0029】
【図1】本発明の第1実施形態に係る航空機と目標機とを示す模式図である。
【図2】本発明の第1実施形態に係る航空機の火器管制に関する電気的構成図である。
【図3】本発明の第1実施形態に係る割当処理の流れを示すフローチャートである。
【図4】本発明の第1実施形態に係る割当処理を行う場合における航空機と目標機との位置関係を示す模式図である。
【図5】本発明の第1実施形態に係る割当機の表示指示装置に表示される画像を示す模式図である。
【図6】本発明の第1実施形態に係る割当処理を行わない航空機の火器管制に係る電気的構成図である。
【図7】本発明の第1実施形態に係る目標割当指示に基づいた位置関係画像を示す模式図である。
【図8】本発明の第2実施形態に係る航空機の火器管制に関する電気的構成図である。
【図9】本発明の第2実施形態に係る航空機から発射されたミサイルが目標へ到達するか否かの説明に要する模式図である。
【図10】本発明の第2実施形態に係る発射されたミサイルの目標を変更する場合における、割当機の表示指示装置の画面に表示される位置関係画像及び割当画像を示す図である。
【発明を実施するための形態】
【0030】
以下に、本発明に係る管制装置、航空機、及び管制方法の一実施形態について、図面を参照して説明する。
【0031】
〔第1実施形態〕
以下、本発明の第1実施形態について説明する。
図1は、本第1実施形態に係る航空機10と目標を示した模式図である。なお、本第1実施形態では、目標を一例として脅威となる一又は複数の航空機(以下、「目標機12」という。)とする。なお、本第1実施形態に係る航空機10は、一例として、複数機で編隊飛行を行っているものとする。
【0032】
航空機10は、一又は複数の目標機12に対する射撃及び捜索追尾が可能とされている。なお、射撃とは、飛しょう体であるミサイル14の発射及び機関砲の使用等をいう。航空機10は、例えば、遠距離の目標機12に対してはミサイル14を発射し、近距離の目標機12に対しては、機関砲を使用する。
【0033】
そして、本第1実施形態に係る航空機10は、各航空機10間で各種情報の送受信(データリンク)が可能とされている。すなわち、各航空機10は、自機及び目標機12に係る各種情報を共有するためにネットワーク化されている。
また、本第1実施形態では、後述する火器管制装置30による割当処理を行う航空機10を、複数の航空機10のうち定められた一機とし、以下の説明において、割当処理を行う航空機10を割当機10Aといい、自機以外の他の航空機10を僚機10Bという。
【0034】
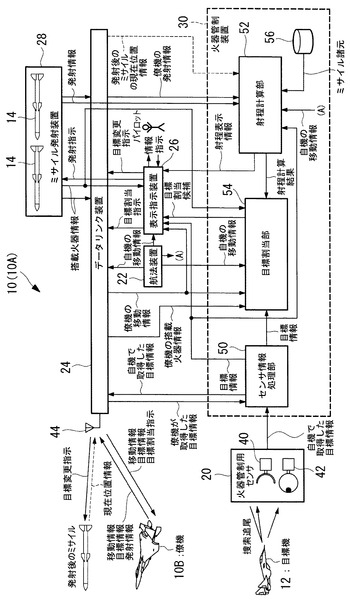
図2は、本第1実施形態に係る割当処理を行う割当機10Aの火器管制に関する電気的構成図である。
【0035】
航空機10は、火器管制用センサ20、航法装置22、データリンク装置24、表示指示装置26、ミサイル発射装置28、及び火器管制装置30を備えている。
【0036】
火器管制用センサ20は、目標機12の捜索追尾を行うためのセンサであり、例えば、レーダー40やIRST(Infra-Red Search and Track system)42を備えている。
航空機10は、火器管制用センサ20を用いて目標機12を捜索追尾し、目標機12の移動に関する情報である目標情報を取得する。目標情報には、目標機12の位置、目標機12の速度、及び目標機12の加速度等が含まれる。
なお、目標情報は、目標機12に対して火器を使用するために用いられる。火器には、機関砲及びミサイル14等が含まれる。
【0037】
航法装置22は、自機の位置、自機の速度、自機の加速度、及び自機の進行方向等を算出する。なお、算出結果は、自機の移動に関する情報である移動情報として出力される。また、移動情報には、自機の航続距離の指標とするための残燃料等、他の情報が含まれてもよい。
【0038】
データリンク装置24は、アンテナ44を備え、自機の移動情報及び自機で取得した目標情報等を僚機10Bへ送信したり、僚機10Bの移動情報及び僚機10Bで取得した目標情報等を僚機10Bから受信したり、アンテナ44を介して自機と僚機10Bとの間で各種情報の送受信(データリンク)を行う。
【0039】
表示指示装置26は、航法装置22から出力された移動情報に基づいた自機の現在位置、及び自機で取得した目標情報に基づいた目標機12の位置等を表示する。また、表示指示装置26は、データリンク装置24を介して受信した、僚機10Bの移動情報に基づいた僚機10Bの現在位置や進行方向、僚機10Bで取得した目標情報に基づいた目標機12の現在位置や進行方向を表示する。
【0040】
このように、表示指示装置26は、自機で捜索追尾した目標機12と共に、僚機10Bから送信された目標情報に基づいて、僚機10Bで捜索追尾した目標機12も表示する。
このため、自機で捜索追尾できていない目標機12もパイロットは認識することができ、編隊飛行を行っている複数の航空機10のパイロットの間で、目標機12に対する情報の共有が可能となる。
【0041】
ミサイル発射装置28は、自機が搭載しているミサイル14を発射させる装置であり、表示指示装置26からのミサイル14の発射指示が入力された場合、発射指示に基づいてミサイル14を発射させる。また、ミサイル発射装置28は、例えばミサイル14の種類毎の残弾数等、自機が搭載している火器に関する情報である搭載火器情報を、表示指示装置26、データリンク装置24、及び火器管制装置30へ出力する。さらに、ミサイル発射装置28は、発射したミサイル14の種類、ミサイル14の発射時における位置、目標とした目標機12(ミサイル14の誘導対象となる目標機12)、発射した時間等、発射したミサイル14に関する情報である発射情報を火器管制装置30へ出力する。
【0042】
火器管制装置30は、火器管制用センサ20、航法装置22、及びデータリンク装置24と接続され、自機で取得した目標機情報及び僚機10Bで取得した目標情報に基づいて、火器を用いた目標機12に対する射撃の管制を行う。なお、本第1実施形態では、火器としてミサイル14を用いた管制を行う場合について説明する。
【0043】
火器管制装置30は、センサ情報処理部50、射程計算部52、及び目標割当部54を備えている。なお、センサ情報処理部50、射程計算部52、及び目標割当部54は、火器管制装置30の機能を示しており、センサ情報処理部50、目標割当部54、及び射程計算部52の機能を一つの演算装置で実行してもよい。
【0044】
センサ情報処理部50は、火器管制用センサ20から自機の捜索追尾によって取得した目標情報が入力され、データリンク装置24から僚機10Bの捜索追尾によって取得した目標情報が入力される。
そして、センサ情報処理部50は、自機で取得した目標情報をデータリンク装置24へ出力し、自機及び僚機10Bで取得した目標情報を目標割当部54、表示指示装置26、及び射程計算部52へ出力する。
【0045】
射程計算部52は、ミサイル発射装置28からの発射情報、航法装置22からの自機の移動情報、センサ情報処理部50からの目標情報、及び記憶部56に記憶されているミサイル諸元に基づいて、発射したミサイル14及び該ミサイル14と目標機12との位置関係から、該ミサイル14が目標機12へ到達するか否かを計算する。そして、計算結果を表示指示装置26へ表示させるための情報である射程表示情報を表示指示装置26へ出力する。
表示指示装置26は、射程表示情報が入力されると、射程表示情報で示されるミサイル14と目標機12との位置関係等を表示し、パイロットに認識させる。
【0046】
目標割当部54は、センサ情報処理部50から自機及び僚機10Bで取得した目標情報が入力され、航法装置22から自機の移動情報が入力され、ミサイル発射装置28から自機の搭載火器情報が入力され、データリンク装置24から僚機10Bの搭載火器情報及び僚機10Bの移動情報が入力される。
そして、目標割当部54は、上記各情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行う。
【0047】
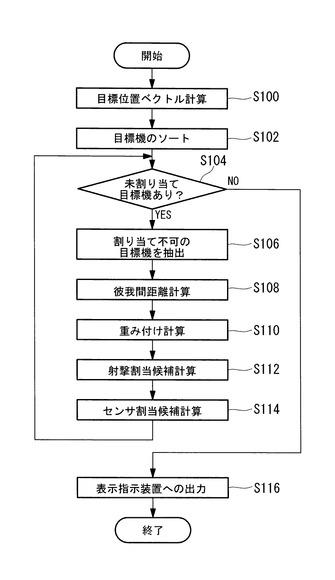
図3は、割当処理を行う場合に、目標割当部54によって実行される割当候補算出プログラムの処理の流れを示すフローチャートであり、割当候補算出プログラムは不図示の記憶装置の所定領域に予め記憶されている。なお、本プログラムは、例えば、割当機10Aのパイロットが予め定められたスイッチを押圧することによって開始されてもよいし、編隊飛行を行っている複数の航空機10のうち、少なくとも1機が火器管制用センサ20によって目標機12を検知した場合に開始されてもよい。
【0048】
本第1実施形態では、航空機10と目標機12との位置関係の一例を示した図4の模式図のように、複数の航空機10が、複数の目標機12に対して射撃及び捜索追尾を行う場合について説明する。なお、図4の例では、割当機10Aが僚機10Bの後方に位置しているが、これは一例であり、割当機10Aは、僚機10Bの前方等他の位置に位置していてもよい。
また、以下の説明では、一例として、割当処理を行う割当機10A(自機)を識別して説明する場合に「3機」といい、割当処理を行わない航空機10(僚機10B)を各々識別して説明する場合に「1機」又は「2機」という。また、各目標機12を識別して説明する場合、「目標機」の末尾に「♯1」〜「♯4」の何れかを付す。
【0049】
まず、ステップ100では、目標情報から、目標機12毎の現在位置、速度、及び進行方向を算出する、目標位置ベクトル計算を行う。
【0050】
次のステップ102では、目標位置ベクトル計算の結果に基づいて、目標機12をソートする。ソートの条件としては、例えば、割当機10Aからの距離が短い順にソートする。
【0051】
次のステップ104では、目標機12が全て射撃の対象として割り当てられたか否かを判定し、肯定判定の場合は、ステップ116へ移行し、否定判定の場合は、ステップ106へ移行する。
【0052】
ステップ106では、割り当てが不可能な目標機12を抽出する。割り当てが不可能な目標機12とは、例えば、航空機10に対して回避行動をとり、複数の航空機10何れからミサイル14を発射しても射程距離内にない目標機12である。
【0053】
次のステップ108では、目標位置ベクトル計算の結果及び自機の移動情報に含まれる自機の位置情報及び僚機10Bの移動情報に含まれる僚機10Bの位置情報から、各航空機10と各目標機12との距離(以下、「彼我間距離」という。)を算出する彼我間距離計算を行う。
【0054】
次のステップ110では、彼我間距離、残弾数、及び残燃料等毎に予め定められた係数を乗算することで重み付けを行う異なる複数の評価関数を用いて、航空機10に対する目標機12の重み(重要度)を算出する重み付け計算を行う。
【0055】
次のステップ112では、重み付け計算の計算結果から、各目標機12毎に射撃を行う航空機10の候補の順番を算出(ソート)する射撃割当候補計算を行う。ソートの条件としては、例えば、彼我間距離が短い順、残弾数が多い順、既に割り当てられている目標機12が少ない順、ミサイル発射可能角度に目標機12を納めるまでの旋回時間が短い順、残燃料が多い順等である。
【0056】
次のステップ114では、各目標機12毎に捜索追尾を行う航空機10の候補の順番を算出(ソート)するセンサ割当候補計算を行う。ソートの条件としては、例えば、航空機10の捜索追尾能力である火器管制用センサ20の覆域(以下、「センサ覆域」という。)内に目標機12が位置しかつ彼我間距離が長い順、残弾数が少ない順、既に割り当てられている目標機12が少ない順、センサ覆域内に目標機12を納めるまでの旋回時間が短い順、残燃料が多い順等である。
【0057】
割当候補算出プログラムは、ステップ114が終了すると、ステップ104へ移行し、上述したようにステップ104で否定判定となった場合に、ステップ116へ移行する。
【0058】
ステップ116では、射撃割当候補計算及びセンサ割当候補計算によってソートされた順で航空機10に対する目標機12の割り当てを示した目標候補情報を表示指示装置26へ出力し、本プログラムを終了する。
なお、表示指示装置26は、目標割当部54からの目標候補情報が入力されると、予め定められた画面に図5に示すような画像を表示し、割当機10Aのパイロットによる各航空機10に対する目標機12の割り当ての選択を受け付ける。
【0059】
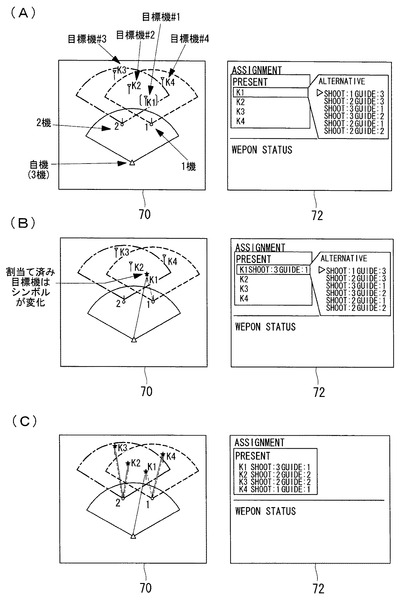
図5は、割当機10A(3機)の表示指示装置26に表示される画像を示す模式図である。
図5(A),(B),(C)における左側の画像は、航空機10と目標機12との位置関係を示す画像(以下、「位置関係画像70」という。)であり、航空機10及び目標機12がシンボル(標識)及び識別番号によって表示されている。位置関係画像70は、自機及び僚機10Bの移動情報並びに自機及び僚機10Bで取得した目標情報に基づいて生成される。
一方、右側の画像は、航空機10に対する目標機12の割り当ての選択を受け付けるための画像(以下、「割当画像72」という。)であり、目標候補情報に基づいて生成される。
【0060】
なお、位置関係画像70及び割当画像72は同一の画面に表示されてもよいし、異なる画面に表示されてもよいが、パイロットの視線の移動を少なくさせるためにも、左右又は上下に隣接して表示されることが好ましい。
【0061】
図5(A)は、割り当ての選択を行う場合であり、位置関係画像70において割り当てが行われる目標機12(図5(A)の例では、目標機♯1(K1))を示すシンボルが強調されて表示される。なお、割り当てが行われる目標機12は、パイロットの操作により選択可能とされている。
そして、割当画像72には、割り当てが行われる目標機12に対して、射撃を行う航空機10の候補及び捜索追尾を行う航空機10の候補が複数表示(「ALTERNATIVE」の欄における表示)される。図5(A)の例では、「SHOOT」とその右隣の数字の組み合わせが、射撃を行う航空機10を示し、「GUIDE」とその右隣の数字の組み合わせが、捜索追尾を行う航空機10を示している。なお、割当画像72に表示される候補は、予め設定されたソートの条件に応じた順番で表示される。
【0062】
そして、図5(B)の割当画像72に示すように、目標機12に対して射撃を行う航空機10及び捜索追尾を行う航空機10が割り当てられると、図5(B)の位置関係画像70に示すように、割り当て済みの目標機12に対応するシンボルが変化する。
【0063】
図5(C)は、全ての目標機12に対する射撃を行う航空機10及び捜索追尾を行う航空機10が割り当てられた状態を示している。
図5(C)の例では、航空機10のうち自機(3機)が目標機♯1を射撃し、僚機10B(1機)が目標機♯4を射撃すると共に目標機♯1,♯4を捜索追尾し、僚機10B(2機)が目標機♯2,♯3を射撃すると共に捜索追尾することとなる。
【0064】
なお、位置関係画像70における航空機10を示すシンボルと目標機12を示すシンボルとを結ぶ実線は、航空機10と該航空機10が射撃の対象とする目標機12とを結ぶ線である。一方、破線は、航空機10と該航空機10が捜索追尾の対象とする目標機12とを結ぶ線である。このように、航空機10と目標機12を線で結ぶことにより、パイロットは、容易に自機及び僚機12Bで射撃又は捜索追尾すべき目標機12を認識することができる。
【0065】
そして、割当機10Aは、割当処理によって割り当てた、射撃対象となる目標機12又は捜索追尾の対象となる目標機12に関する指示(以下、「目標割当指示」という。)を、データリンク装置24を介して各僚機10Bへ送信する。
【0066】
なお、割当処理によって、射撃の対象となる目標機12及び捜索追尾の対象となる目標機12が割り当られない航空機10が発生してもよいし、図5に示すように、射撃の対象となる目標機12と捜索追尾の対象となる目標機12両方が割り当られる航空機10が発生してもよい。
【0067】
図6は、割当処理を行わない航空機10の火器管制に係る電気的構成図である。
割当処理を行わない航空機10(上記説明における僚機10B)の火器管制に係る電気的構成は、割当機10Aと同じであるが、目標割当部54は機能しない。
【0068】
なお、割当処理を行わない航空機10は、データリンク装置24を介して、割当機10Aを含む僚機10Bの移動情報及び僚機10Bで取得した目標情報が入力される。そのため、表示指示装置26は、僚機10Bの移動情報に基づいた僚機10Bの位置や進行方向、僚機10Bで取得した目標情報に基づいた目標機12の位置や進行方向を表示する。
【0069】
また、割当処理を行わない航空機10は、データリンク装置24を介して、割当機10Aから送信された目標割当指示を受信し、受信した目標割当指示に基づいて、表示指示装置26の画面に位置関係画像70を表示する。
【0070】
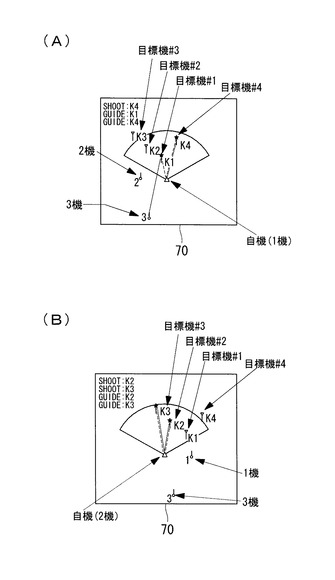
図7は、目標割当指示に基づいた位置関係画像70の一例である。
図7(A)は、図4における航空機10(1機)が備える表示指示装置26の画面に表示される位置関係画像70である。一方、図7(B)は、図4における航空機10(2機)が備える表示指示装置26の画面に表示される位置関係画像70である。
【0071】
図7(A)に示すように、航空機10(1機)の位置関係画像70には、「SHOOT:K4 GUIDE:K1 GUIDE:K4」とのように、自機による射撃の対象及び捜索追尾の対象となる目標機12の識別番号の表示が含まれる。該表示は、航空機10(1機)に対して、目標機#4を射撃し、目標機#1,#4をセンサ覆域内に納め続けることで捜索追尾すると共に、データリンク装置24を介して目標機#1,#4の目標情報を僚機10Bへ送信する旨の指示を示している。
【0072】
また、位置関係画像70は、自機を示すシンボルと目標機#4を示すシンボルとを実線で結ぶことによって目標機#4が射撃の対象であることを図示し、自機を示すシンボルと目標機#1,#4を示すシンボルとを破線で結ぶことによって目標機#1,#4が捜索追尾の対象であることを図示する。なお、位置関係画像70は、僚機10Bの位置も図示する。
なお、位置関係画像70は、自機の捜索追尾の対象である目標機#1を射撃の対象とする航空機10(3機)も図示するので、自機である航空機10(3機)のパイロットは、自機が捜索追尾する目標機12を射撃の対象とする僚機10Bを容易に認識することができる。
【0073】
一方、図7(B)に示すように、航空機10(2機)の位置関係画像70には、「SHOOT:K2 SHOOT:K3 GUIDE:K2 GUIDE:K3」とのように表示される。該表示は、航空機10(2機)に対して、目標機#2,#3を射撃し、目標機#2,#3をセンサ覆域内に納め続けることで捜索追尾すると共に、データリンク装置24を介して目標機#2,#3の目標情報を僚機10Bへ送信する旨の指示を示している。
【0074】
また、図7(B)に示す位置関係画像70は、自機を示すシンボルと目標機#2,#3を示すシンボルとを実線で結ぶことによって目標機#2,#3が射撃の対象であることを図示し、自機を示すシンボルと目標機#2,#3を示すシンボルとを破線で結ぶことによって目標機#2,#3が捜索追尾の対象であることを図示する。
【0075】
なお、本第1実施形態に係る航空機10は、割当機10Aが変更可能とされている。
例えば、編隊飛行を行っている複数の航空機10に予め優先順位が設定され、データリンクによって各種情報の送受信が可能となっている航空機10のうち、優先順位が最も高い航空機10が割当機10Aとされる。
【0076】
このため、割当機10Aが何らかの理由によって離脱し、僚機10Bとの間でデータリンクによる各種情報の送受信ができない状態となると、割当機10Aからの情報の受信が途絶えたことを受け、次に優先順位が高い航空機10が自動的に割当機10Aとなる。これにより、割当処理を行う航空機10が存在しなくなることを防止できる。
【0077】
なお、割当機10Aは、優先順位によって決定されるのではなく、表示指示装置26を介してパイロットによる選択で決定されてもよい。また、割当機10Aが離脱することなく、割当機10Aが他の航空機10に変更されてもよいし、割当機10Aとされない航空機10が予め設定されていてもよい。
【0078】
以上説明したように、本第1実施形態に係る航空機10(割当機10A)は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
【0079】
すなわち、割当処理とは、割当機10Aが僚機10Bに対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる処理であり、割当処理によって、複数の航空機10が同一の目標機12を射撃することを防ぐことができると共に、射撃の対象から漏れる目標機12の発生を防ぐことができる。また、割当処理によって、目標機12の捜索追尾を効率良く行え、捜索追尾の対象から漏れる目標機12の発生を防ぐことができる。
また、本第1実施形態に係る航空機10は、データリンク装置24を介して僚機10Bとの間で、目標情報が共有される。そのため、自機で捜索追尾できない目標機12であっても、僚機10Bが捜索追尾できている目標機12に対して自機が射撃を行うことができる。
【0080】
従って、本第1実施形態に係る航空機10は、目標機12に対する射撃を行うための火器管制を効率良く行うことができる。
【0081】
〔第2実施形態〕
以下、本発明の第2実施形態について説明する。
なお、本第2実施形態に係る航空機10に搭載されているミサイル14は、発射元の航空機10との間だけでなく、他の航空機10(僚機10B)との間でもデータリンク装置24を介した各種情報の送受信(データリンク)が可能とされている。すなわち、ミサイル14もデータリンクによるネットワークに含まれる。
【0082】
図8は、本第2実施形態に係る割当処理を行う割当機10Aの火器管制に関する電気的構成図である。なお、図8における図2と同一の構成部分については図2と同一の符号を付して、その説明を省略する。
【0083】
本第2実施形態に係る割当機10Aは、データリンク装置24を介して、ミサイルを発射した僚機10Bから、発射情報を受信する。すなわち、本第2実施形態に係る航空機10は、自機が発射したミサイル14の発射情報をデータリンク装置24を介して僚機10Bへ送信する。
また、割当機10Aは、データリンク装置24を介して、発射後のミサイル14から該ミサイルの現在位置を示す現在位置情報を受信してもよい。
【0084】
そして、ミサイル14の発射情報及び発射後のミサイル14の現在位置情報は、射程計算部52に入力される。
【0085】
本第2実施形態に係る射程計算部52は、ミサイル14の発射情報、並びに自機及び僚機10Bが取得した目標情報に基づいて、発射したミサイル14の飛しょう経路及びミサイル14の推定現在位置(推定現在位置情報)を計算し、ミサイル14が目標とした誘導中の目標機12へ到達するか否かに関する射程計算(以下、「目標到達射程計算」という。)を行う。
そして、本第2実施形態に係る割当機10Aは、射程計算部52によって発射したミサイル14が誘導中の目標機12へ到達できないという結果が得られた場合、該ミサイル14の目標を他の目標機12へ変更させる。
なお、ミサイル14の推定現在位置情報に替えて、ミサイル14からデータリンク装置24を介して受信したミサイル14の現在位置情報を用いて目標到達射程計算を行うことで計算精度を向上させることができる。
【0086】
以下、具体的に説明する。
【0087】
射程計算部52は、目標到達射程計算と共に、誘導中の目標機12以外の他の目標機12に対しても、発射されたミサイル14が到達するか否かに関する射程計算(以下、「非目標到達射程計算」という。)を行う。
【0088】
図9(A)の模式図では、航空機10(1機)からミサイルが目標機#1へ向けて発射されており、割当機10Aは、目標到達射程計算によって航空機10(1機)から発射されたミサイル14が目標機#1へ到達するか否かと共に、非目標到達射程によって計算該ミサイル14が目標機#2へ到達するか否かも算出する。
【0089】
そして、図9(B)の模式図に示すように目標機#1が離脱する等によって、発射したミサイル14が誘導中の目標機12へ到達できないと算出された場合、非目標到達計算によって計算された、該ミサイル14が到達可能な他の目標機12が新たな目標として変更される。
そして、本第2実施形態に係る割当機10Aは、発射したミサイル14に対して、新たな目標機となる目標機12の位置等を示す目標変更指示を、データリンク装置24を介して送信する。
【0090】
目標変更指示を受信したミサイル14は、目標変更指示に基づいて、目標となる目標機12を変更し、変更後の新たな目標機12(図9(B)の例では目標機#2)へ向かう。
【0091】
図10は、発射されたミサイル14の目標を変更する場合における、割当機10Aの表示指示装置26の画面に表示される位置関係画像70及び割当画像72の一例である。
【0092】
図10(A)は、位置関係画像70を示しており、航空機10(1機)が目標機#1に対してミサイル14を発射した状態を示している。
【0093】
図10(B−1),(B−2),(B−3)は、航空機10(1機)からミサイル14が発射された状態における割当画像72を示している。
【0094】
図10(B−1)の割当画像72には、目標機12に対する現在の射撃及び捜索追尾の状態を示す「PRESENT」の欄は、航空機10(1機)が目標機#1を捜索追尾している状態を示している。なお、既に航空機10(1機)が目標機#1に対してミサイル14を発射しているため、ミサイル14の発射前には「SHOOT:1」と表示されているものが非表示となっている。
【0095】
そして、発射されたミサイル14と目標機12との位置関係を示す「WEPON STATUS」の欄には、発射された全てのミサイル14(図10の例では1つ)と捜索追尾されている全ての目標機12(図10の例では目標機#1,#2)との位置関係が示されている。具体的には、記憶部56に記憶されているミサイル諸元に基づくミサイル14の射程が直線のシンボルで示され、データリンク装置24で受信したミサイル14の現在位置情報に基づくミサイル14の推定位置が円形のシンボルで示され、目標情報に基づく目標機12の位置が矢印のシンボルによって示されている。
なお、ミサイル14が誘導中の目標機12には、標識(図10の例では逆三角形の標識)が付される。
【0096】
図10(B−2)の割当画像72は、目標到達射程計算によってミサイル14が誘導中の目標機12に到達しないと判断された場合を示している。
図10(B−2)の例では、目標機#1が航空機10(1機)のセンサ覆域内から離脱しつつあるため、航空機10(1機)では捜索追尾ができないことを、割当画像72は、「PRESENT」における「GUIDE:1」及び「WEPON STATUS」におけるミサイル14の推定位置を示すシンボルを、一例として点滅させることでパイロットに認識させる。
【0097】
そして、発射されたミサイル14は、目標機#1に到達しないため、該ミサイル14の射程距離内にある異なる目標機#2が新たな目標として設定される。なお、新たな目標は、割当機10Aのパイロットによって、割当画像72に表示されている他の目標機12の中から選択されてもよいし、発射されたミサイル14に最も近い目標機12が自動的に選択されてもよい。
【0098】
また、割当画像72には、上記点滅と共に、目標機#1を新たに捜索追尾させる航空機10の候補が「ALTERNATIVE」に表示される。なお、図10(B−2)の例では、「ALTERNATIVE」に表示される候補として、航空機10(1機)と共に航空機10(2機)が表示されるが、航空機10(1機)については、点滅表示される。
割当機10Aのパイロットは、「ALTERNATIVE」から離脱する目標機12を捜索追尾する新たな航空機10を選択する。
【0099】
図10(B−3)は、発射されたミサイル14に新たな目標(目標機#2)が設定され、かつ離脱した目標機12を捜索追尾する航空機10(2機)が新たに設定された状態を示している。
そして、表示指示装置26は、発射されたミサイル14へ、目標を新たな目標機12(目標機#2)に変更するための目標変更指示を、データリンク装置24を介して送信する。また、表示指示装置26は、航空機10(2機)へ目標機#1を捜索追尾する指示を示した目標割当指示を、データリンク装置24を介して送信する。
【0100】
以上説明したように、本第2実施形態に係る割当機10Aは、目標機12に対する射撃としてミサイル14の発射が行われ、発射されたミサイル14が目標とされた目標機12へ到達できない場合、該ミサイル14の目標を他の目標機12へ変更させる。
従って、本第2実施形態に係る航空機10は、ミサイル14の発射後、目標機12が離脱し、ミサイル14が射程距離内に位置しなくなる等、ミサイル14が目標機12へ到達できない場合、ミサイル14の目標を他の目標へ変更させるので、発射されたミサイル14が無駄となることを抑制することができる。
【0101】
なお、ミサイル14が割当機10Aとデータリンクされていなくても、ミサイル14が発射元の航空機10と各種情報の送受信が可能とされていれば、割当機10Aは、該発射元の航空機10を介して、ミサイル14からの現在位置情報の受信及びミサイル14へ目標変更指示の送信を行ってもよい。
【0102】
以上、本発明を、上記各実施形態を用いて説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されない。発明の要旨を逸脱しない範囲で上記各実施形態に多様な変更または改良を加えることができ、該変更または改良を加えた形態も本発明の技術的範囲に含まれる。
【0103】
例えば、上記各実施形態では、目標を、脅威となる航空機とする形態について説明したが、本発明は、これに限定されるものではなく、目標を、脅威となる飛しょう体、脅威となる車両、及び脅威となる地上設備等とする形態としてもよい。なお、目標を車両や地上設備とする場合、火器管制用センサ20が、空中の目標に対して捜索追尾を行う空対空モードから地上の目標に対して捜索追尾を行う空対地モードへと変更可能とされている必要がある。
【0104】
また、上記各実施形態では、目標機12の割当処理において、射撃割当候補及び捜索追尾候補を算出し、射撃割当候補及び捜索追尾候補からパイロットが自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を選択する形態について説明したが、本発明は、これに限定されるものではない。例えば、本発明は、射撃割当候補及び捜索追尾候補の算出並びにパイロットによる選択を行うことなく、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる形態としてもよい。
この形態の場合、割当処理における重み付け計算によって最も上位となった順に、自機及び僚機10Bに対して目標機12を割り当てる。これにより、複数の航空機10全てが割当処理を行ったとしても、割当処理の結果が同じとなるため、割当機10Aを設定する必要が無い。
【0105】
また、上記各実施形態で説明した割当候補算出プログラムの処理の流れも一例であり、本発明の主旨を逸脱しない範囲内において不要なステップを削除したり、新たなステップを追加したり、処理順序を入れ替えたりすることができることは言うまでもない。
【0106】
例えば、割当候補算出プログラムは、彼我間距離のみに基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当ててもよい。具体的には、各航空機10に対して、彼我間距離が最も近い目標機12が射撃の対象又は捜索追尾の対象として割り当てられる。
【符号の説明】
【0107】
10 航空機
10A 割当機
10B 僚機
12 目標機
14 ミサイル
20 火器管制用センサ
24 データリンク装置
26 表示指示装置
28 ミサイル発射装置
30 火器管制装置
52 射程計算部
54 目標割当部
【技術分野】
【0001】
本発明は、管制装置、航空機、及び管制方法に関するものである。
【背景技術】
【0002】
目標に対する射撃及び捜索追尾が可能な航空機は、捜索追尾している目標に対して射撃を行う場合がある。
このような、航空機の一例として、特許文献1には、アクティブな目標捜索追尾装置と、電磁波を放射することなく目標を捜索追尾できるパッシブな目標捜索追尾装置と、を統合して用いることで、目標を捜索追尾し、目標に対して射撃を行う航空機が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3736112号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、編隊飛行している複数の航空機が、自機の目標に対する捜索追尾の結果に基づいて、各々の判断で射撃を行う目標を決定すると、目標が重複したり、射撃の対象から漏れる目標が生じる可能性がある。また、複数の航空機が、各々の判断で捜索追尾を行う目標を決定すると、目標が複数存在する場合等には、捜索追尾から漏れる目標が生じる可能性がある。
このように、複数の航空機が目標に対する射撃や射撃のための捜索追尾を行う場合に、効率的な火器管制が行われない場合があった。
【0005】
本発明は、このような事情に鑑みてなされたものであって、目標に対する射撃を行うための火器管制を効率良く行うことができる管制装置、航空機、及び管制方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の管制装置、航空機、及び管制方法は以下の手段を採用する。
【0007】
すなわち、本発明に係る管制装置は、一又は複数の目標に対する射撃及び捜索追尾が可能な航空機に搭載される管制装置であって、一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する受信手段と、前記受信手段によって受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う割当手段と、自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当手段によって割り当てられた目標に関する情報を他の前記航空機へ送信する送信手段と、を備える。
【0008】
本発明によれば、航空機は、一又は複数の目標に対する射撃及び捜索追尾が可能とされている。
そして、受信手段によって、一又は複数の他の航空機から、他の航空機の移動に関する情報である移動情報及び他の航空機が捜索追尾によって取得した目標の移動に関する情報である目標情報が受信され、送信手段によって、自機の移動情報及び自機が捜索追尾によって取得した目標情報が他の航空機へ送信される。
【0009】
なお、他の航空機とは、自機の僚機である。
目標とは、例えば、脅威となる航空機、脅威となる飛しょう体、脅威となる車両、及び脅威となる地上設備等である。また、目標に対する射撃とは、航空機が搭載している、例えば機関砲及び飛しょう体であるミサイル等の火器を目標に対して用いることをいう。
航空機(他の航空機、自機)の移動情報とは、例えば、航空機の位置、航空機の速度、航空機の加速度、及び航空機の機首が向いている方位等である。また、航空機が捜索追尾によって取得した目標情報とは、例えば、目標の位置、目標の速度、及び目標の加速度等である。
【0010】
そして、割当手段によって、受信手段で受信した他の航空機の移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び他の航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理が行われる。割当手段によって割り当てられた目標に関する情報は、他の航空機へ送信手段によって送信される。
【0011】
すなわち、割当処理とは、自機及び僚機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる処理であり、割当処理によって、複数の航空機が同一の目標を射撃することを防ぐことができると共に、射撃の対象から漏れる目標の発生を防ぐことができる。また、割当処理によって、捜索追尾の対象から漏れる目標の発生を防ぐことができる。
なお、割当処理によって、射撃の対象となる目標及び捜索追尾の対象となる目標が割り当られない航空機が発生してもよいし、射撃の対象となる目標と捜索追尾の対象となる目標両方が割り当られる航空機が発生してもよい。
従って、本発明は、目標に対する射撃を行うための火器管制を効率良く行うことができる。
【0012】
また、本発明の管制装置は、前記割当処理を行う航空機が、複数の前記航空機のうち、定められた一機であり、該定められた一機は変更可能とされてもよい。
【0013】
本発明によれば、割当処理を行う航空機を定めることによって、火器管制を効率よく行え、割当処理を行う航空機が変更可能とされることによって、割当処理を行っていた航空機が離脱しても、新たな航空機が割当処理を行うため、火器管制が中断することを防ぐことができる。
【0014】
また、本発明の管制装置は、前記割当手段が、目標に対する射撃として飛しょう体の発射が行われ、発射された該飛しょう体が定められた目標へ到達できない場合、該飛しょう体の該定められた目標を他の目標へ変更してもよい。
【0015】
本発明によれば、例えば、飛しょう体の発射後、目標が離脱し、飛しょう体の射程距離内に位置しなくなる等、飛しょう体が該目標へ到達できない場合、該飛しょう体の目標を他の目標へ変更させるので、発射された飛しょう体が無駄となることを抑制することができる。
【0016】
また、本発明の管制装置は、前記飛しょう体が、前記航空機との間で該飛しょう体の位置を示す位置情報の送信及び前記目標の位置を示す情報の受信が可能とされてもよい。
【0017】
本発明によれば、飛しょう体と割当処理を行う航空機との間で、飛しょう体の位置情報及び目標情報の送受信が可能となるので、効率良く飛しょう体の目標の変更が可能となる。
【0018】
また、本発明の管制装置は、前記割当手段が、目標と各前記航空機との距離に応じて、射撃の対象となる目標を自機及び他の前記航空機に対して割り当ててもよい。
【0019】
本発明によれば、簡易かつ効果的に、射撃の対象となる目標を自機及び他の航空機に対して割り当てることができる。
【0020】
また、本発明の管制装置は、前記割当手段が、目標と各前記航空機との距離及び前記航空機が有する捜索追尾の能力に応じて、捜索追尾の対象となる目標を自機及び他の前記航空機に対して割り当ててもよい。
【0021】
本発明によれば、簡易かつ効果的に、捜索追尾の対象となる目標を自機及び他の航空機に対して割り当てることができる。
【0022】
また、本発明の管制装置は、前記受信手段によって受信された、他の前記航空機から送信された前記目標情報に基づいて、自機で捜索追尾した目標と共に他の前記航空機で捜索追尾した目標を表示する表示手段を備えてもよい。
【0023】
本発明によれば、他の航空機のパイロットとの間で、目標に対する情報の共有化が可能となる。
【0024】
一方、本発明に係る航空機は、一又は複数の目標に対する射撃を行う射撃装置と、目標を捜索追尾する捜索追尾装置と、上記記載の管制装置と、を備える。
【0025】
本発明によれば、上記記載の管制装置を備えるので、目標に対する射撃を行うための火器管制を効率良く行うことができる。
【0026】
さらに、本発明に係る管制方法は、一又は複数の目標に対する射撃及び捜索追尾が可能な航空機の管制方法であって、一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する第1工程と、受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う第2工程と、自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当処理によって割り当てられた目標に関する情報を他の前記航空機へ送信する第3工程と、を含む。
【0027】
本発明によれば、割当処理によって、複数の僚機が同一の目標を射撃することを防ぐことができると共に、射撃の対象から漏れる目標の発生を防ぐことができる。また、割当処理によって、捜索追尾の対象から漏れる目標の発生を防ぐことができる。
従って、本発明は、目標に対する射撃を行うための火器管制を効率良く行うことができる。
【発明の効果】
【0028】
本発明によれば、目標に対する射撃を行うための火器管制を効率良く行うことができる、という優れた効果を有する。
【図面の簡単な説明】
【0029】
【図1】本発明の第1実施形態に係る航空機と目標機とを示す模式図である。
【図2】本発明の第1実施形態に係る航空機の火器管制に関する電気的構成図である。
【図3】本発明の第1実施形態に係る割当処理の流れを示すフローチャートである。
【図4】本発明の第1実施形態に係る割当処理を行う場合における航空機と目標機との位置関係を示す模式図である。
【図5】本発明の第1実施形態に係る割当機の表示指示装置に表示される画像を示す模式図である。
【図6】本発明の第1実施形態に係る割当処理を行わない航空機の火器管制に係る電気的構成図である。
【図7】本発明の第1実施形態に係る目標割当指示に基づいた位置関係画像を示す模式図である。
【図8】本発明の第2実施形態に係る航空機の火器管制に関する電気的構成図である。
【図9】本発明の第2実施形態に係る航空機から発射されたミサイルが目標へ到達するか否かの説明に要する模式図である。
【図10】本発明の第2実施形態に係る発射されたミサイルの目標を変更する場合における、割当機の表示指示装置の画面に表示される位置関係画像及び割当画像を示す図である。
【発明を実施するための形態】
【0030】
以下に、本発明に係る管制装置、航空機、及び管制方法の一実施形態について、図面を参照して説明する。
【0031】
〔第1実施形態〕
以下、本発明の第1実施形態について説明する。
図1は、本第1実施形態に係る航空機10と目標を示した模式図である。なお、本第1実施形態では、目標を一例として脅威となる一又は複数の航空機(以下、「目標機12」という。)とする。なお、本第1実施形態に係る航空機10は、一例として、複数機で編隊飛行を行っているものとする。
【0032】
航空機10は、一又は複数の目標機12に対する射撃及び捜索追尾が可能とされている。なお、射撃とは、飛しょう体であるミサイル14の発射及び機関砲の使用等をいう。航空機10は、例えば、遠距離の目標機12に対してはミサイル14を発射し、近距離の目標機12に対しては、機関砲を使用する。
【0033】
そして、本第1実施形態に係る航空機10は、各航空機10間で各種情報の送受信(データリンク)が可能とされている。すなわち、各航空機10は、自機及び目標機12に係る各種情報を共有するためにネットワーク化されている。
また、本第1実施形態では、後述する火器管制装置30による割当処理を行う航空機10を、複数の航空機10のうち定められた一機とし、以下の説明において、割当処理を行う航空機10を割当機10Aといい、自機以外の他の航空機10を僚機10Bという。
【0034】
図2は、本第1実施形態に係る割当処理を行う割当機10Aの火器管制に関する電気的構成図である。
【0035】
航空機10は、火器管制用センサ20、航法装置22、データリンク装置24、表示指示装置26、ミサイル発射装置28、及び火器管制装置30を備えている。
【0036】
火器管制用センサ20は、目標機12の捜索追尾を行うためのセンサであり、例えば、レーダー40やIRST(Infra-Red Search and Track system)42を備えている。
航空機10は、火器管制用センサ20を用いて目標機12を捜索追尾し、目標機12の移動に関する情報である目標情報を取得する。目標情報には、目標機12の位置、目標機12の速度、及び目標機12の加速度等が含まれる。
なお、目標情報は、目標機12に対して火器を使用するために用いられる。火器には、機関砲及びミサイル14等が含まれる。
【0037】
航法装置22は、自機の位置、自機の速度、自機の加速度、及び自機の進行方向等を算出する。なお、算出結果は、自機の移動に関する情報である移動情報として出力される。また、移動情報には、自機の航続距離の指標とするための残燃料等、他の情報が含まれてもよい。
【0038】
データリンク装置24は、アンテナ44を備え、自機の移動情報及び自機で取得した目標情報等を僚機10Bへ送信したり、僚機10Bの移動情報及び僚機10Bで取得した目標情報等を僚機10Bから受信したり、アンテナ44を介して自機と僚機10Bとの間で各種情報の送受信(データリンク)を行う。
【0039】
表示指示装置26は、航法装置22から出力された移動情報に基づいた自機の現在位置、及び自機で取得した目標情報に基づいた目標機12の位置等を表示する。また、表示指示装置26は、データリンク装置24を介して受信した、僚機10Bの移動情報に基づいた僚機10Bの現在位置や進行方向、僚機10Bで取得した目標情報に基づいた目標機12の現在位置や進行方向を表示する。
【0040】
このように、表示指示装置26は、自機で捜索追尾した目標機12と共に、僚機10Bから送信された目標情報に基づいて、僚機10Bで捜索追尾した目標機12も表示する。
このため、自機で捜索追尾できていない目標機12もパイロットは認識することができ、編隊飛行を行っている複数の航空機10のパイロットの間で、目標機12に対する情報の共有が可能となる。
【0041】
ミサイル発射装置28は、自機が搭載しているミサイル14を発射させる装置であり、表示指示装置26からのミサイル14の発射指示が入力された場合、発射指示に基づいてミサイル14を発射させる。また、ミサイル発射装置28は、例えばミサイル14の種類毎の残弾数等、自機が搭載している火器に関する情報である搭載火器情報を、表示指示装置26、データリンク装置24、及び火器管制装置30へ出力する。さらに、ミサイル発射装置28は、発射したミサイル14の種類、ミサイル14の発射時における位置、目標とした目標機12(ミサイル14の誘導対象となる目標機12)、発射した時間等、発射したミサイル14に関する情報である発射情報を火器管制装置30へ出力する。
【0042】
火器管制装置30は、火器管制用センサ20、航法装置22、及びデータリンク装置24と接続され、自機で取得した目標機情報及び僚機10Bで取得した目標情報に基づいて、火器を用いた目標機12に対する射撃の管制を行う。なお、本第1実施形態では、火器としてミサイル14を用いた管制を行う場合について説明する。
【0043】
火器管制装置30は、センサ情報処理部50、射程計算部52、及び目標割当部54を備えている。なお、センサ情報処理部50、射程計算部52、及び目標割当部54は、火器管制装置30の機能を示しており、センサ情報処理部50、目標割当部54、及び射程計算部52の機能を一つの演算装置で実行してもよい。
【0044】
センサ情報処理部50は、火器管制用センサ20から自機の捜索追尾によって取得した目標情報が入力され、データリンク装置24から僚機10Bの捜索追尾によって取得した目標情報が入力される。
そして、センサ情報処理部50は、自機で取得した目標情報をデータリンク装置24へ出力し、自機及び僚機10Bで取得した目標情報を目標割当部54、表示指示装置26、及び射程計算部52へ出力する。
【0045】
射程計算部52は、ミサイル発射装置28からの発射情報、航法装置22からの自機の移動情報、センサ情報処理部50からの目標情報、及び記憶部56に記憶されているミサイル諸元に基づいて、発射したミサイル14及び該ミサイル14と目標機12との位置関係から、該ミサイル14が目標機12へ到達するか否かを計算する。そして、計算結果を表示指示装置26へ表示させるための情報である射程表示情報を表示指示装置26へ出力する。
表示指示装置26は、射程表示情報が入力されると、射程表示情報で示されるミサイル14と目標機12との位置関係等を表示し、パイロットに認識させる。
【0046】
目標割当部54は、センサ情報処理部50から自機及び僚機10Bで取得した目標情報が入力され、航法装置22から自機の移動情報が入力され、ミサイル発射装置28から自機の搭載火器情報が入力され、データリンク装置24から僚機10Bの搭載火器情報及び僚機10Bの移動情報が入力される。
そして、目標割当部54は、上記各情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行う。
【0047】
図3は、割当処理を行う場合に、目標割当部54によって実行される割当候補算出プログラムの処理の流れを示すフローチャートであり、割当候補算出プログラムは不図示の記憶装置の所定領域に予め記憶されている。なお、本プログラムは、例えば、割当機10Aのパイロットが予め定められたスイッチを押圧することによって開始されてもよいし、編隊飛行を行っている複数の航空機10のうち、少なくとも1機が火器管制用センサ20によって目標機12を検知した場合に開始されてもよい。
【0048】
本第1実施形態では、航空機10と目標機12との位置関係の一例を示した図4の模式図のように、複数の航空機10が、複数の目標機12に対して射撃及び捜索追尾を行う場合について説明する。なお、図4の例では、割当機10Aが僚機10Bの後方に位置しているが、これは一例であり、割当機10Aは、僚機10Bの前方等他の位置に位置していてもよい。
また、以下の説明では、一例として、割当処理を行う割当機10A(自機)を識別して説明する場合に「3機」といい、割当処理を行わない航空機10(僚機10B)を各々識別して説明する場合に「1機」又は「2機」という。また、各目標機12を識別して説明する場合、「目標機」の末尾に「♯1」〜「♯4」の何れかを付す。
【0049】
まず、ステップ100では、目標情報から、目標機12毎の現在位置、速度、及び進行方向を算出する、目標位置ベクトル計算を行う。
【0050】
次のステップ102では、目標位置ベクトル計算の結果に基づいて、目標機12をソートする。ソートの条件としては、例えば、割当機10Aからの距離が短い順にソートする。
【0051】
次のステップ104では、目標機12が全て射撃の対象として割り当てられたか否かを判定し、肯定判定の場合は、ステップ116へ移行し、否定判定の場合は、ステップ106へ移行する。
【0052】
ステップ106では、割り当てが不可能な目標機12を抽出する。割り当てが不可能な目標機12とは、例えば、航空機10に対して回避行動をとり、複数の航空機10何れからミサイル14を発射しても射程距離内にない目標機12である。
【0053】
次のステップ108では、目標位置ベクトル計算の結果及び自機の移動情報に含まれる自機の位置情報及び僚機10Bの移動情報に含まれる僚機10Bの位置情報から、各航空機10と各目標機12との距離(以下、「彼我間距離」という。)を算出する彼我間距離計算を行う。
【0054】
次のステップ110では、彼我間距離、残弾数、及び残燃料等毎に予め定められた係数を乗算することで重み付けを行う異なる複数の評価関数を用いて、航空機10に対する目標機12の重み(重要度)を算出する重み付け計算を行う。
【0055】
次のステップ112では、重み付け計算の計算結果から、各目標機12毎に射撃を行う航空機10の候補の順番を算出(ソート)する射撃割当候補計算を行う。ソートの条件としては、例えば、彼我間距離が短い順、残弾数が多い順、既に割り当てられている目標機12が少ない順、ミサイル発射可能角度に目標機12を納めるまでの旋回時間が短い順、残燃料が多い順等である。
【0056】
次のステップ114では、各目標機12毎に捜索追尾を行う航空機10の候補の順番を算出(ソート)するセンサ割当候補計算を行う。ソートの条件としては、例えば、航空機10の捜索追尾能力である火器管制用センサ20の覆域(以下、「センサ覆域」という。)内に目標機12が位置しかつ彼我間距離が長い順、残弾数が少ない順、既に割り当てられている目標機12が少ない順、センサ覆域内に目標機12を納めるまでの旋回時間が短い順、残燃料が多い順等である。
【0057】
割当候補算出プログラムは、ステップ114が終了すると、ステップ104へ移行し、上述したようにステップ104で否定判定となった場合に、ステップ116へ移行する。
【0058】
ステップ116では、射撃割当候補計算及びセンサ割当候補計算によってソートされた順で航空機10に対する目標機12の割り当てを示した目標候補情報を表示指示装置26へ出力し、本プログラムを終了する。
なお、表示指示装置26は、目標割当部54からの目標候補情報が入力されると、予め定められた画面に図5に示すような画像を表示し、割当機10Aのパイロットによる各航空機10に対する目標機12の割り当ての選択を受け付ける。
【0059】
図5は、割当機10A(3機)の表示指示装置26に表示される画像を示す模式図である。
図5(A),(B),(C)における左側の画像は、航空機10と目標機12との位置関係を示す画像(以下、「位置関係画像70」という。)であり、航空機10及び目標機12がシンボル(標識)及び識別番号によって表示されている。位置関係画像70は、自機及び僚機10Bの移動情報並びに自機及び僚機10Bで取得した目標情報に基づいて生成される。
一方、右側の画像は、航空機10に対する目標機12の割り当ての選択を受け付けるための画像(以下、「割当画像72」という。)であり、目標候補情報に基づいて生成される。
【0060】
なお、位置関係画像70及び割当画像72は同一の画面に表示されてもよいし、異なる画面に表示されてもよいが、パイロットの視線の移動を少なくさせるためにも、左右又は上下に隣接して表示されることが好ましい。
【0061】
図5(A)は、割り当ての選択を行う場合であり、位置関係画像70において割り当てが行われる目標機12(図5(A)の例では、目標機♯1(K1))を示すシンボルが強調されて表示される。なお、割り当てが行われる目標機12は、パイロットの操作により選択可能とされている。
そして、割当画像72には、割り当てが行われる目標機12に対して、射撃を行う航空機10の候補及び捜索追尾を行う航空機10の候補が複数表示(「ALTERNATIVE」の欄における表示)される。図5(A)の例では、「SHOOT」とその右隣の数字の組み合わせが、射撃を行う航空機10を示し、「GUIDE」とその右隣の数字の組み合わせが、捜索追尾を行う航空機10を示している。なお、割当画像72に表示される候補は、予め設定されたソートの条件に応じた順番で表示される。
【0062】
そして、図5(B)の割当画像72に示すように、目標機12に対して射撃を行う航空機10及び捜索追尾を行う航空機10が割り当てられると、図5(B)の位置関係画像70に示すように、割り当て済みの目標機12に対応するシンボルが変化する。
【0063】
図5(C)は、全ての目標機12に対する射撃を行う航空機10及び捜索追尾を行う航空機10が割り当てられた状態を示している。
図5(C)の例では、航空機10のうち自機(3機)が目標機♯1を射撃し、僚機10B(1機)が目標機♯4を射撃すると共に目標機♯1,♯4を捜索追尾し、僚機10B(2機)が目標機♯2,♯3を射撃すると共に捜索追尾することとなる。
【0064】
なお、位置関係画像70における航空機10を示すシンボルと目標機12を示すシンボルとを結ぶ実線は、航空機10と該航空機10が射撃の対象とする目標機12とを結ぶ線である。一方、破線は、航空機10と該航空機10が捜索追尾の対象とする目標機12とを結ぶ線である。このように、航空機10と目標機12を線で結ぶことにより、パイロットは、容易に自機及び僚機12Bで射撃又は捜索追尾すべき目標機12を認識することができる。
【0065】
そして、割当機10Aは、割当処理によって割り当てた、射撃対象となる目標機12又は捜索追尾の対象となる目標機12に関する指示(以下、「目標割当指示」という。)を、データリンク装置24を介して各僚機10Bへ送信する。
【0066】
なお、割当処理によって、射撃の対象となる目標機12及び捜索追尾の対象となる目標機12が割り当られない航空機10が発生してもよいし、図5に示すように、射撃の対象となる目標機12と捜索追尾の対象となる目標機12両方が割り当られる航空機10が発生してもよい。
【0067】
図6は、割当処理を行わない航空機10の火器管制に係る電気的構成図である。
割当処理を行わない航空機10(上記説明における僚機10B)の火器管制に係る電気的構成は、割当機10Aと同じであるが、目標割当部54は機能しない。
【0068】
なお、割当処理を行わない航空機10は、データリンク装置24を介して、割当機10Aを含む僚機10Bの移動情報及び僚機10Bで取得した目標情報が入力される。そのため、表示指示装置26は、僚機10Bの移動情報に基づいた僚機10Bの位置や進行方向、僚機10Bで取得した目標情報に基づいた目標機12の位置や進行方向を表示する。
【0069】
また、割当処理を行わない航空機10は、データリンク装置24を介して、割当機10Aから送信された目標割当指示を受信し、受信した目標割当指示に基づいて、表示指示装置26の画面に位置関係画像70を表示する。
【0070】
図7は、目標割当指示に基づいた位置関係画像70の一例である。
図7(A)は、図4における航空機10(1機)が備える表示指示装置26の画面に表示される位置関係画像70である。一方、図7(B)は、図4における航空機10(2機)が備える表示指示装置26の画面に表示される位置関係画像70である。
【0071】
図7(A)に示すように、航空機10(1機)の位置関係画像70には、「SHOOT:K4 GUIDE:K1 GUIDE:K4」とのように、自機による射撃の対象及び捜索追尾の対象となる目標機12の識別番号の表示が含まれる。該表示は、航空機10(1機)に対して、目標機#4を射撃し、目標機#1,#4をセンサ覆域内に納め続けることで捜索追尾すると共に、データリンク装置24を介して目標機#1,#4の目標情報を僚機10Bへ送信する旨の指示を示している。
【0072】
また、位置関係画像70は、自機を示すシンボルと目標機#4を示すシンボルとを実線で結ぶことによって目標機#4が射撃の対象であることを図示し、自機を示すシンボルと目標機#1,#4を示すシンボルとを破線で結ぶことによって目標機#1,#4が捜索追尾の対象であることを図示する。なお、位置関係画像70は、僚機10Bの位置も図示する。
なお、位置関係画像70は、自機の捜索追尾の対象である目標機#1を射撃の対象とする航空機10(3機)も図示するので、自機である航空機10(3機)のパイロットは、自機が捜索追尾する目標機12を射撃の対象とする僚機10Bを容易に認識することができる。
【0073】
一方、図7(B)に示すように、航空機10(2機)の位置関係画像70には、「SHOOT:K2 SHOOT:K3 GUIDE:K2 GUIDE:K3」とのように表示される。該表示は、航空機10(2機)に対して、目標機#2,#3を射撃し、目標機#2,#3をセンサ覆域内に納め続けることで捜索追尾すると共に、データリンク装置24を介して目標機#2,#3の目標情報を僚機10Bへ送信する旨の指示を示している。
【0074】
また、図7(B)に示す位置関係画像70は、自機を示すシンボルと目標機#2,#3を示すシンボルとを実線で結ぶことによって目標機#2,#3が射撃の対象であることを図示し、自機を示すシンボルと目標機#2,#3を示すシンボルとを破線で結ぶことによって目標機#2,#3が捜索追尾の対象であることを図示する。
【0075】
なお、本第1実施形態に係る航空機10は、割当機10Aが変更可能とされている。
例えば、編隊飛行を行っている複数の航空機10に予め優先順位が設定され、データリンクによって各種情報の送受信が可能となっている航空機10のうち、優先順位が最も高い航空機10が割当機10Aとされる。
【0076】
このため、割当機10Aが何らかの理由によって離脱し、僚機10Bとの間でデータリンクによる各種情報の送受信ができない状態となると、割当機10Aからの情報の受信が途絶えたことを受け、次に優先順位が高い航空機10が自動的に割当機10Aとなる。これにより、割当処理を行う航空機10が存在しなくなることを防止できる。
【0077】
なお、割当機10Aは、優先順位によって決定されるのではなく、表示指示装置26を介してパイロットによる選択で決定されてもよい。また、割当機10Aが離脱することなく、割当機10Aが他の航空機10に変更されてもよいし、割当機10Aとされない航空機10が予め設定されていてもよい。
【0078】
以上説明したように、本第1実施形態に係る航空機10(割当機10A)は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
【0079】
すなわち、割当処理とは、割当機10Aが僚機10Bに対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる処理であり、割当処理によって、複数の航空機10が同一の目標機12を射撃することを防ぐことができると共に、射撃の対象から漏れる目標機12の発生を防ぐことができる。また、割当処理によって、目標機12の捜索追尾を効率良く行え、捜索追尾の対象から漏れる目標機12の発生を防ぐことができる。
また、本第1実施形態に係る航空機10は、データリンク装置24を介して僚機10Bとの間で、目標情報が共有される。そのため、自機で捜索追尾できない目標機12であっても、僚機10Bが捜索追尾できている目標機12に対して自機が射撃を行うことができる。
【0080】
従って、本第1実施形態に係る航空機10は、目標機12に対する射撃を行うための火器管制を効率良く行うことができる。
【0081】
〔第2実施形態〕
以下、本発明の第2実施形態について説明する。
なお、本第2実施形態に係る航空機10に搭載されているミサイル14は、発射元の航空機10との間だけでなく、他の航空機10(僚機10B)との間でもデータリンク装置24を介した各種情報の送受信(データリンク)が可能とされている。すなわち、ミサイル14もデータリンクによるネットワークに含まれる。
【0082】
図8は、本第2実施形態に係る割当処理を行う割当機10Aの火器管制に関する電気的構成図である。なお、図8における図2と同一の構成部分については図2と同一の符号を付して、その説明を省略する。
【0083】
本第2実施形態に係る割当機10Aは、データリンク装置24を介して、ミサイルを発射した僚機10Bから、発射情報を受信する。すなわち、本第2実施形態に係る航空機10は、自機が発射したミサイル14の発射情報をデータリンク装置24を介して僚機10Bへ送信する。
また、割当機10Aは、データリンク装置24を介して、発射後のミサイル14から該ミサイルの現在位置を示す現在位置情報を受信してもよい。
【0084】
そして、ミサイル14の発射情報及び発射後のミサイル14の現在位置情報は、射程計算部52に入力される。
【0085】
本第2実施形態に係る射程計算部52は、ミサイル14の発射情報、並びに自機及び僚機10Bが取得した目標情報に基づいて、発射したミサイル14の飛しょう経路及びミサイル14の推定現在位置(推定現在位置情報)を計算し、ミサイル14が目標とした誘導中の目標機12へ到達するか否かに関する射程計算(以下、「目標到達射程計算」という。)を行う。
そして、本第2実施形態に係る割当機10Aは、射程計算部52によって発射したミサイル14が誘導中の目標機12へ到達できないという結果が得られた場合、該ミサイル14の目標を他の目標機12へ変更させる。
なお、ミサイル14の推定現在位置情報に替えて、ミサイル14からデータリンク装置24を介して受信したミサイル14の現在位置情報を用いて目標到達射程計算を行うことで計算精度を向上させることができる。
【0086】
以下、具体的に説明する。
【0087】
射程計算部52は、目標到達射程計算と共に、誘導中の目標機12以外の他の目標機12に対しても、発射されたミサイル14が到達するか否かに関する射程計算(以下、「非目標到達射程計算」という。)を行う。
【0088】
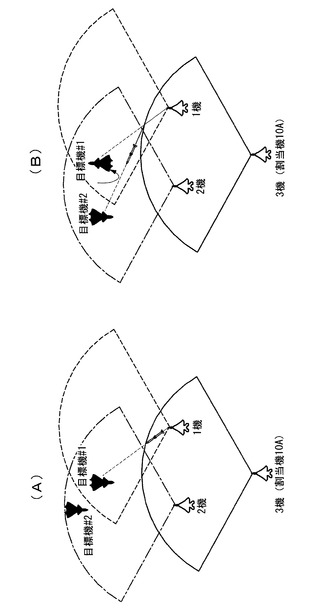
図9(A)の模式図では、航空機10(1機)からミサイルが目標機#1へ向けて発射されており、割当機10Aは、目標到達射程計算によって航空機10(1機)から発射されたミサイル14が目標機#1へ到達するか否かと共に、非目標到達射程によって計算該ミサイル14が目標機#2へ到達するか否かも算出する。
【0089】
そして、図9(B)の模式図に示すように目標機#1が離脱する等によって、発射したミサイル14が誘導中の目標機12へ到達できないと算出された場合、非目標到達計算によって計算された、該ミサイル14が到達可能な他の目標機12が新たな目標として変更される。
そして、本第2実施形態に係る割当機10Aは、発射したミサイル14に対して、新たな目標機となる目標機12の位置等を示す目標変更指示を、データリンク装置24を介して送信する。
【0090】
目標変更指示を受信したミサイル14は、目標変更指示に基づいて、目標となる目標機12を変更し、変更後の新たな目標機12(図9(B)の例では目標機#2)へ向かう。
【0091】
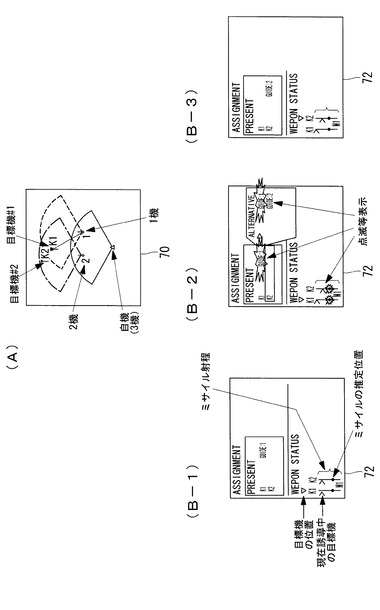
図10は、発射されたミサイル14の目標を変更する場合における、割当機10Aの表示指示装置26の画面に表示される位置関係画像70及び割当画像72の一例である。
【0092】
図10(A)は、位置関係画像70を示しており、航空機10(1機)が目標機#1に対してミサイル14を発射した状態を示している。
【0093】
図10(B−1),(B−2),(B−3)は、航空機10(1機)からミサイル14が発射された状態における割当画像72を示している。
【0094】
図10(B−1)の割当画像72には、目標機12に対する現在の射撃及び捜索追尾の状態を示す「PRESENT」の欄は、航空機10(1機)が目標機#1を捜索追尾している状態を示している。なお、既に航空機10(1機)が目標機#1に対してミサイル14を発射しているため、ミサイル14の発射前には「SHOOT:1」と表示されているものが非表示となっている。
【0095】
そして、発射されたミサイル14と目標機12との位置関係を示す「WEPON STATUS」の欄には、発射された全てのミサイル14(図10の例では1つ)と捜索追尾されている全ての目標機12(図10の例では目標機#1,#2)との位置関係が示されている。具体的には、記憶部56に記憶されているミサイル諸元に基づくミサイル14の射程が直線のシンボルで示され、データリンク装置24で受信したミサイル14の現在位置情報に基づくミサイル14の推定位置が円形のシンボルで示され、目標情報に基づく目標機12の位置が矢印のシンボルによって示されている。
なお、ミサイル14が誘導中の目標機12には、標識(図10の例では逆三角形の標識)が付される。
【0096】
図10(B−2)の割当画像72は、目標到達射程計算によってミサイル14が誘導中の目標機12に到達しないと判断された場合を示している。
図10(B−2)の例では、目標機#1が航空機10(1機)のセンサ覆域内から離脱しつつあるため、航空機10(1機)では捜索追尾ができないことを、割当画像72は、「PRESENT」における「GUIDE:1」及び「WEPON STATUS」におけるミサイル14の推定位置を示すシンボルを、一例として点滅させることでパイロットに認識させる。
【0097】
そして、発射されたミサイル14は、目標機#1に到達しないため、該ミサイル14の射程距離内にある異なる目標機#2が新たな目標として設定される。なお、新たな目標は、割当機10Aのパイロットによって、割当画像72に表示されている他の目標機12の中から選択されてもよいし、発射されたミサイル14に最も近い目標機12が自動的に選択されてもよい。
【0098】
また、割当画像72には、上記点滅と共に、目標機#1を新たに捜索追尾させる航空機10の候補が「ALTERNATIVE」に表示される。なお、図10(B−2)の例では、「ALTERNATIVE」に表示される候補として、航空機10(1機)と共に航空機10(2機)が表示されるが、航空機10(1機)については、点滅表示される。
割当機10Aのパイロットは、「ALTERNATIVE」から離脱する目標機12を捜索追尾する新たな航空機10を選択する。
【0099】
図10(B−3)は、発射されたミサイル14に新たな目標(目標機#2)が設定され、かつ離脱した目標機12を捜索追尾する航空機10(2機)が新たに設定された状態を示している。
そして、表示指示装置26は、発射されたミサイル14へ、目標を新たな目標機12(目標機#2)に変更するための目標変更指示を、データリンク装置24を介して送信する。また、表示指示装置26は、航空機10(2機)へ目標機#1を捜索追尾する指示を示した目標割当指示を、データリンク装置24を介して送信する。
【0100】
以上説明したように、本第2実施形態に係る割当機10Aは、目標機12に対する射撃としてミサイル14の発射が行われ、発射されたミサイル14が目標とされた目標機12へ到達できない場合、該ミサイル14の目標を他の目標機12へ変更させる。
従って、本第2実施形態に係る航空機10は、ミサイル14の発射後、目標機12が離脱し、ミサイル14が射程距離内に位置しなくなる等、ミサイル14が目標機12へ到達できない場合、ミサイル14の目標を他の目標へ変更させるので、発射されたミサイル14が無駄となることを抑制することができる。
【0101】
なお、ミサイル14が割当機10Aとデータリンクされていなくても、ミサイル14が発射元の航空機10と各種情報の送受信が可能とされていれば、割当機10Aは、該発射元の航空機10を介して、ミサイル14からの現在位置情報の受信及びミサイル14へ目標変更指示の送信を行ってもよい。
【0102】
以上、本発明を、上記各実施形態を用いて説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されない。発明の要旨を逸脱しない範囲で上記各実施形態に多様な変更または改良を加えることができ、該変更または改良を加えた形態も本発明の技術的範囲に含まれる。
【0103】
例えば、上記各実施形態では、目標を、脅威となる航空機とする形態について説明したが、本発明は、これに限定されるものではなく、目標を、脅威となる飛しょう体、脅威となる車両、及び脅威となる地上設備等とする形態としてもよい。なお、目標を車両や地上設備とする場合、火器管制用センサ20が、空中の目標に対して捜索追尾を行う空対空モードから地上の目標に対して捜索追尾を行う空対地モードへと変更可能とされている必要がある。
【0104】
また、上記各実施形態では、目標機12の割当処理において、射撃割当候補及び捜索追尾候補を算出し、射撃割当候補及び捜索追尾候補からパイロットが自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を選択する形態について説明したが、本発明は、これに限定されるものではない。例えば、本発明は、射撃割当候補及び捜索追尾候補の算出並びにパイロットによる選択を行うことなく、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる形態としてもよい。
この形態の場合、割当処理における重み付け計算によって最も上位となった順に、自機及び僚機10Bに対して目標機12を割り当てる。これにより、複数の航空機10全てが割当処理を行ったとしても、割当処理の結果が同じとなるため、割当機10Aを設定する必要が無い。
【0105】
また、上記各実施形態で説明した割当候補算出プログラムの処理の流れも一例であり、本発明の主旨を逸脱しない範囲内において不要なステップを削除したり、新たなステップを追加したり、処理順序を入れ替えたりすることができることは言うまでもない。
【0106】
例えば、割当候補算出プログラムは、彼我間距離のみに基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当ててもよい。具体的には、各航空機10に対して、彼我間距離が最も近い目標機12が射撃の対象又は捜索追尾の対象として割り当てられる。
【符号の説明】
【0107】
10 航空機
10A 割当機
10B 僚機
12 目標機
14 ミサイル
20 火器管制用センサ
24 データリンク装置
26 表示指示装置
28 ミサイル発射装置
30 火器管制装置
52 射程計算部
54 目標割当部
【特許請求の範囲】
【請求項1】
一又は複数の目標に対する射撃及び捜索追尾が可能な航空機に搭載される管制装置であって、
一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する受信手段と、
前記受信手段によって受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う割当手段と、
自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当手段によって割り当てられた目標に関する情報を他の前記航空機へ送信する送信手段と、
を備えた管制装置。
【請求項2】
前記割当処理を行う航空機は、複数の前記航空機のうち、定められた一機であり、該定められた一機は変更可能とされている請求項1記載の管制装置。
【請求項3】
前記割当手段は、目標に対する射撃として飛しょう体の発射が行われ、発射された該飛しょう体が定められた目標へ到達できない場合、該飛しょう体の該定められた目標を他の目標へ変更させる請求項1又は請求項2記載の管制装置。
【請求項4】
前記飛しょう体は、前記航空機との間で該飛しょう体の位置を示す位置情報の送信及び前記目標の位置を示す情報の受信が可能とされている請求項3記載の管制装置。
【請求項5】
前記割当手段は、目標と各前記航空機との距離に応じて、射撃の対象となる目標を自機及び他の前記航空機に対して割り当てる請求項1から請求項4の何れか1項記載の管制装置。
【請求項6】
前記割当手段は、目標と各前記航空機との距離及び前記航空機が有する捜索追尾の能力に応じて、捜索追尾の対象となる目標を自機及び他の前記航空機に対して割り当てる請求項1から請求項5の何れか1項記載の管制装置。
【請求項7】
前記受信手段によって受信された、他の前記航空機から送信された前記目標情報に基づいて、自機で捜索追尾した目標と共に他の前記航空機で捜索追尾した目標を表示する表示手段を備えた請求項1から請求項6の何れか1項記載の管制装置。
【請求項8】
一又は複数の目標に対する射撃を行う射撃装置と、
目標を捜索追尾する捜索追尾装置と、
請求項1から請求項7の何れか1項に記載の管制装置と、
を備えた航空機。
【請求項9】
一又は複数の目標に対する射撃及び捜索追尾が可能な航空機の管制方法であって、
一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する第1工程と、
受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う第2工程と、
自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当処理によって割り当てられた目標に関する情報を他の前記航空機へ送信する第3工程と、
を含む航空機の管制方法。
【請求項1】
一又は複数の目標に対する射撃及び捜索追尾が可能な航空機に搭載される管制装置であって、
一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する受信手段と、
前記受信手段によって受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う割当手段と、
自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当手段によって割り当てられた目標に関する情報を他の前記航空機へ送信する送信手段と、
を備えた管制装置。
【請求項2】
前記割当処理を行う航空機は、複数の前記航空機のうち、定められた一機であり、該定められた一機は変更可能とされている請求項1記載の管制装置。
【請求項3】
前記割当手段は、目標に対する射撃として飛しょう体の発射が行われ、発射された該飛しょう体が定められた目標へ到達できない場合、該飛しょう体の該定められた目標を他の目標へ変更させる請求項1又は請求項2記載の管制装置。
【請求項4】
前記飛しょう体は、前記航空機との間で該飛しょう体の位置を示す位置情報の送信及び前記目標の位置を示す情報の受信が可能とされている請求項3記載の管制装置。
【請求項5】
前記割当手段は、目標と各前記航空機との距離に応じて、射撃の対象となる目標を自機及び他の前記航空機に対して割り当てる請求項1から請求項4の何れか1項記載の管制装置。
【請求項6】
前記割当手段は、目標と各前記航空機との距離及び前記航空機が有する捜索追尾の能力に応じて、捜索追尾の対象となる目標を自機及び他の前記航空機に対して割り当てる請求項1から請求項5の何れか1項記載の管制装置。
【請求項7】
前記受信手段によって受信された、他の前記航空機から送信された前記目標情報に基づいて、自機で捜索追尾した目標と共に他の前記航空機で捜索追尾した目標を表示する表示手段を備えた請求項1から請求項6の何れか1項記載の管制装置。
【請求項8】
一又は複数の目標に対する射撃を行う射撃装置と、
目標を捜索追尾する捜索追尾装置と、
請求項1から請求項7の何れか1項に記載の管制装置と、
を備えた航空機。
【請求項9】
一又は複数の目標に対する射撃及び捜索追尾が可能な航空機の管制方法であって、
一又は複数の他の前記航空機から、他の前記航空機の移動に関する情報である移動情報及び他の前記航空機が捜索追尾によって取得した前記目標の移動に関する情報である目標情報を受信する第1工程と、
受信した他の前記航空機の前記移動情報及び前記目標情報、並びに自機の前記移動情報及び自機の捜索追尾によって取得した前記目標情報に基づいて、自機及び他の前記航空機に対して、射撃の対象となる目標又は捜索追尾の対象となる目標を割り当てる割当処理を行う第2工程と、
自機の前記移動情報及び自機が捜索追尾によって取得した前記目標情報、並びに前記割当処理によって割り当てられた目標に関する情報を他の前記航空機へ送信する第3工程と、
を含む航空機の管制方法。
【図1】



【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−179984(P2012−179984A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−43266(P2011−43266)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]