
管路内で内視鏡を前進させる装置
一実施形態において、内視鏡は、本体と、本体から延びて先端部で終わる細長シャフトと、細長シャフトに固定される第1の繋留装置と、細長シャフトから延出可能な第2の繋留装置とを備える。一実施形態において、内視鏡前進装置は、内視鏡の細長シャフトに固定される第1の繋留装置と、細長シャフトから軸方向に延出可能となるように細長シャフトの反対側に取り付けられる第2の繋留装置とを備える。

【発明の詳細な説明】
【背景技術】
【0001】
現在、内視鏡は、医学で病気の診断や外科手術を行うために一般的に使用されている。内視鏡の一般的な用途は消化器系においてである。例えば、内視鏡を口や食道を介して胃内に通す、あるいは、肛門を介して結腸内に通すことが多い。あいにく、小腸等、消化器系のより深い部分に到達するのは、それよりも難しい。具体的には、小腸の様々な捻じれ部分や曲がり部分を通して内視鏡を前進させるのは難しい場合がある。
【0002】
本開示は、以下の図面を参照することにより、理解しやすくなるであろう。図中、同じ参照番号は全図にわたって対応する部分を示す。なお、図面は必ずしも一定の縮尺で描かれたものではない。
【図面の簡単な説明】
【0003】
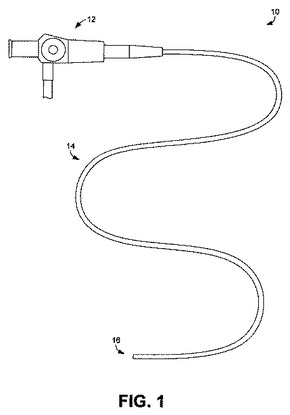
【図1】図1は、内視鏡の一実施形態の側面図である。
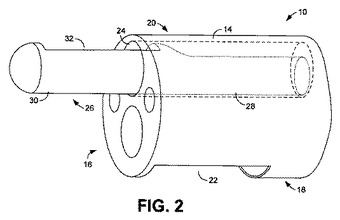
【図2】図2は、図1の内視鏡の先端部の斜視図である。
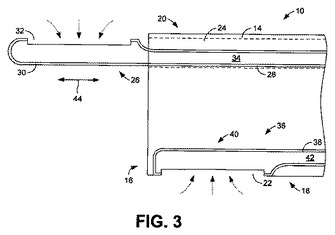
【図3】図3は、図2の先端部の側面図であって、内視鏡の繋留装置の内部を示す図である。
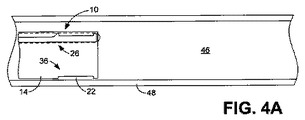
【図4A】図4Aは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
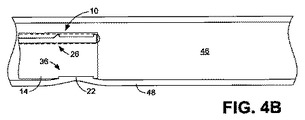
【図4B】図4Bは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
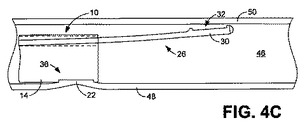
【図4C】図4Cは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
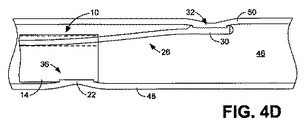
【図4D】図4Dは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
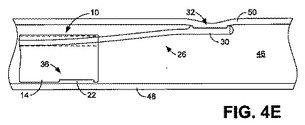
【図4E】図4Eは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
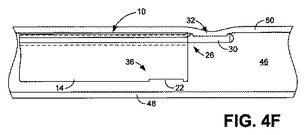
【図4F】図4Fは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図5A】図5Aは、内視鏡装置に付加可能な内視鏡前進装置を示す図である。
【図5B】図5Bは、内視鏡装置に付加可能な内視鏡前進装置を示す図である。
【図6】図6は、繋留装置の吸引ヘッドの一実施形態を示す斜視図である。
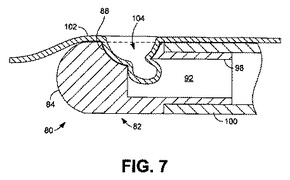
【図7】図7は、組織に繋留した状態の、図6の吸引ヘッドの断面図である。
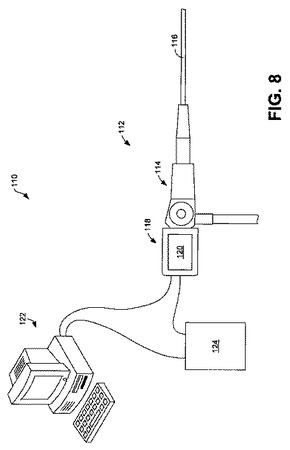
【図8】図8は、管路内で内視鏡を自動的に前進させるシステムの一実施形態を示す概略図である。
【発明を実施するための形態】
【0004】
以下、体内管路等の管路内で内視鏡を前進させるのに使用可能な装置を開示する。いくつかの実施形態において、内視鏡は、管路内で内視鏡を前進させるのに使用可能な一体型装置を備える。他の実施形態においては、それ自体では他の前進装置を備えていない内視鏡(付属部品取付型の場合)に、独立型の内視鏡前進装置を設ける。いずれの場合も、本装置は、管路内の適切な場所に内視鏡を確保するとともに管路を通して内視鏡を引っぱり出す繋留装置を備えている。いくつかの実施形態において、本装置は、固定型吸引部と、延出可能かつ後退可能な吸引部とを備え、これらの吸引部を交互に用いて、管路内で内視鏡を前進させる。
【0005】
図1は、内視鏡10を示す。内視鏡10は本体12を備え、本体12からは、人体における内腔等、管路内への挿入及び前進を行うための細長シャフト14が延びている。いくつかの実施形態において、シャフト14は、小腸内への挿入及び前進を行うための可撓性チューブである。図1に示すように、シャフト14は、終端が先端部16となっている。いくつかの実施形態において、先端部16は、内視鏡本体12に設けられる好適な調節部を用いて手動で繋ぐこともできる。
【0006】
次に図2を参照して、細長シャフト14の先端部16を詳細に示す。図2に示すように、シャフト14は全体として断面が円形であり、第1の側18と、この第1の側の反対側である第2の側20とを有しているとも言える。図2に示すシャフト14の向きでは、第1の側18はシャフトの下側であり、第2の側20はシャフトの上側であると考えることができる。先端部16に隣接するシャフト14の第1の側18には、後述のように管路内で内視鏡10を前進させるのに使用される第1の繋留装置の一部を構成する吸引口22が設けられている。作業チャネル24がシャフト14内を通って先端部16まで延びており、作業チャネル24内には、管路内で内視鏡10を前進させるのに使用される第2の繋留装置26が設けられている。図2の実施形態において、第2の繋留装置26は、吸引口32を有する吸引ヘッド30を終端とする細長チューブ28を備えている。吸引口32は、チューブの内腔34と流体的に連通(流体連通)している(図3参照)。
【0007】
次に図3を参照して、細長シャフト14に含まれる第1の繋留装置36を示す。図3からわかるように、第1の繋留装置36は、第2の繋留装置26と同様の構成である。したがって、第1の繋留装置36は、吸引ヘッド40を終端とする細長チューブ38を備えている。吸引ヘッド40は吸引口22を備え、吸引口22は、チューブ38の内腔42と流体連通している。
【0008】
第1の繋留装置36は細長シャフト14に対して固定されているが、第2の繋留装置26は、矢印44で示すように、作業チャネル24から延出可能、かつ、作業チャネル24内に後退可能である。したがって、第1の繋留装置36を固定型繋留装置と呼び、第2の繋留装置26を可動型、延出可能及び/又は後退可能繋留装置と呼ぶことができる。以下に説明するように、吸引ヘッド30及び40は、内視鏡10を前進させる管路の壁部に繋留装置26及び36を留めるために、組織を引き込むように機能する(破線矢印を参照)。
【0009】
図4A〜図4Fは、管路46内における内視鏡10の前進状態を示す。例として、管路46は小腸の内腔により構成される。まず、図4Aにて、内視鏡10を管路46内に導入する。そして、第1の繋留装置の吸引口22が、管路を画定する壁部48に近接して配置されるように、内視鏡10を操作する。次に、図4Bにて、内視鏡10を壁部48に引きつける、及び/又は、壁部を内視鏡に引きつけるように、第1の繋留装置に吸引を行う。壁部に可撓性がある場合、図4Bに示すように、壁部48の一部を吸引口22に引き込んでもよい。このとき、内視鏡10は壁部48に繋留される。
【0010】
上述のようにして内視鏡10を壁部48に繋留したら、図4Cに示すように、第2の繋留装置26を内視鏡から延出させることができる。特に、第2の繋留装置26は、内視鏡先端部16に対して遠位であって、繋留装置の吸引口30が壁部48と反対側の壁部50に隣接して配置される位置まで、手動により又は自動的に延出する。いくつかの実施形態において、第2の繋留装置26は、壁部50に近接して吸引ヘッド30を容易に配置できるような自然曲率及び/又はバイアスを有していればよい。
【0011】
次に図4Dを参照して、第2の繋留装置を壁部50に引きつける、及び/又は、壁部を第2の繋留装置に引きつけるように、第2の繋留装置26に吸引を行う。壁部50に可撓性がある場合、図4Dに示すように、壁部の一部を吸引ヘッド30の吸引口32に引き込んでもよい。このとき、シャフト14は管路46の対向する壁部48、50に確実に繋留される。
【0012】
次に、図4Eに示すように、壁部48から内視鏡10を解放するように、第1の繋留装置36への吸引を停止する。任意に空気又は他の流体を吹き込むことにより、この解放を促進してもよい。内視鏡10が解放されたら、第2の繋留装置26をシャフト14内に後退させることができる。第2の繋留装置26は、まだ壁部50に繋留されているので、この「後退」は、実際には、図4Fに示すように、管路46内で第2の繋留装置の吸引ヘッド30の方向に内視鏡10を前進させることになる。小腸の場合、腸の柔軟性と可動性によって、腸に対する吸引ヘッド30の繋留位置に向かって内視鏡が移動するのではなく、腸が内視鏡10に向かって、ある程度移動することもある。いずれにしても、相対移動が行われ、内視鏡10は事実上、管路46内を適切に前進する。
【0013】
この時点で、内視鏡10は、管路46内を一定距離、前進している。そして、第1の繋留装置36に再び吸引を行って、管路46内の新たな位置に内視鏡10を留める。さらに前進を行う場合、第2の繋留装置26に対して行った吸引を解除して、壁部50から第2の繋留装置を解放してから、管路46内の所望位置まで内視鏡10が前進するまで、図4B〜図4Fにて説明したプロセスを繰り返せばよい。
【0014】
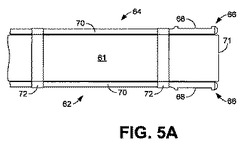
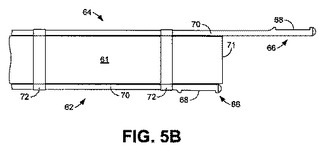
上述の実施形態において、内視鏡は、一体型の前進手段を備えているので、自己前進型内視鏡により構成されていると考えることができる。しかし、他の実施形態においては、同様の動作を可能にするために、非自己前進型内視鏡に独立型の前進手段を設けることができる。図5A及び図5Bは、このような前進手段で、内視鏡60の外装部とともに使用される前進手段の一例を示す。図示のように、第1及び第2の繋留装置62及び64は、内視鏡60とそのシャフト61の外装部に設けられる。繋留装置62、64は、それぞれ、吸引口68を有する吸引ヘッド66と、吸引ヘッドまで延在するチューブ70とを備えている。第1の繋留装置62は、内視鏡60に対して移動しないので、固定型繋留装置と称してもよい。これに対して、第2の繋留装置64は内視鏡シャフト先端部71に対して延出及び後退するので、可動型、延出可能及び/又は後退可能繋留装置と称してもよい。繋留装置62及び64の接続については、第1の繋留装置62を確実に固定し、第2の繋留装置64をシャフト61に対して軸方向に平行移動させることができるならば、いずれの方法であってもよい。いくつかの実施形態において、生体適合性バンド又はクリップ72を用いて、繋留装置62及び64を内視鏡シャフト61に接続する。
【0015】
上述のように、本開示の内視鏡は、小腸等、体内の管路内を通るのに使用することができる。このような用途において、繋留装置は、腸の末端の粘膜に対して着脱可能である。用いる吸引力は、内視鏡を思うように動かせるくらい強いが、粘膜の裂傷やその他の損傷を生じるほど強くはならないように選択する。例えば、完全な吸引状態でも、損傷を生じずに繋留装置を粘膜から強制的に引き離すことができるように、吸引力を選択する。いくつかの実施形態において、2ニュートン(N)〜5Nの吸引力を腸壁に加える。
【0016】
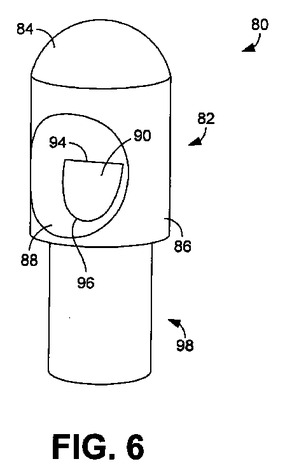
図6は、上述の繋留装置と同様の繋留装置を構成するのに使用できる例示吸引ヘッド80を示す。図6の実施形態において、吸引ヘッド80は、全体として円筒形の本体82を備えている。本体82の端部には、内腔内の繋留装置の通過を容易にする丸みのある(例えば、半球状)先端部84がある。本体82の外面86には、へこみ又は窪み部88を含む吸引口が形成されている。いくつかの実施形態において、窪み部88は全体として円形であり、凹状曲面を備えている。他の実施形態においては、窪み部は全体として半球状である。窪み部88内には、吸引ヘッド80内に形成された内管路92と流体連通している穴90が形成されている(図7参照)。図示の実施形態において、穴90は、直線状端部94と円弧状端部96により画定されている。
【0017】
本体90の基部からは、円筒状取付チューブ98が延びており、このチューブ98は、吸引ヘッド80に吸引を行う対応チューブ100によって受け止められる(図7参照)。いくつかの実施形態において、本体90と取付チューブ98は、アルミニウム等の金属等、単一材料により一体的に構成される。
【0018】
図7は、吸引ヘッド80の使用状態を示す。より詳細には、図7は、吸引ヘッド80を使用して、窪み部88及び穴90に小腸壁等の組織102を引き込むことによって、吸引ヘッドを組織に繋留する様子を示す。図示のように、組織102は吸引ヘッド80内に深く引き込まれ(参照番号104で示す)、強力な繋留を確保することができる。組織102には柔軟性と弾力性があるため、組織に加えられた吸引力が適切に管理されている限り、このような引き込みによって組織が損傷を受けることはない。
【0019】
いくつかの実施形態において、内視鏡の前進を自動化することができる。具体的には、内視鏡検査医が吸引力の付加や解除、あるいは、繋留装置の延出や後退を手動で行わなくてもいいように、内視鏡を前進させるのに使用する装置を機械化してもよい。図8は、小腸等の管路内の内視鏡前進を自動制御する例示システム110を概略的に示す。図8に示すように、システム110は、内視鏡10と同様に本体114と本体から外方に延びる可撓性シャフト116とを備える内視鏡112を有している。説明の都合上、内視鏡112は、図2及び図3にて説明した繋留装置26及び36等の一体型前進装置を備えているものとする。したがって、図8中、この前進装置は見えない状態にある。
【0020】
さらに、システム110は、自動前進ユニット118を備えている。本例において、自動前進ユニット118は、内視鏡112の本体114に取り付けられている。自動前進ユニット118は、少なくとも内視鏡112の可動型繋留装置に接続され、コントロールユニット122が受け取るコマンドに従って可動型繋留装置の延出又は後退を行うように構成されたサーボモータ等のモータ120を備えている。図示の実施形態では、コントロールユニット122は、適切なコントロールソフトウェアを実行するデスクトップコンピュータからなる。また、システム110は、コントロールユニット122により制御されて、内視鏡112の繋留装置に所定レベルの吸引力を与える専用吸引源124を備えている。例として、吸引源124は、吸引を発生させる1以上のポンプからなる。
【0021】
外科手術処置の際に、システム110を用いて、内視鏡112の前進を自動化することができる。執刀医によって内視鏡シャフト116が管路内の所望位置に配置されてから、システム110を作動させて前進を自動化することができる。そして、コントロールユニット122がコントロールコマンドを吸引源124に送り、固定型繋留装置に吸引力を与え、図4Bに示すような方法で管路壁部に固定型繋留装置を留める。なお、管路壁部(例えば、小腸壁)に加える吸引力の量は、固定型繋留装置内の圧力を監視し、必要に応じて真空度を加減することにより制御する。例として、吸引源124、前進ユニット118、あるいは繋留装置と関連する1以上のセンサ(図示せず)で圧力を検知し、フィードバックループにて圧力の値をコントロールユニット122に送ればよい。その情報により、コントロールユニット122は、繋留を確保するのに十分強く、しかも、管路壁部に損傷を与えるほど強くはならないように、慎重に吸引力を制御すればよい。
【0022】
次に、コントロールユニット122は、自動前進ユニット118にコントロールコマンドを送って、図4Cに示すのと同様の方法で、モータ120に内視鏡シャフト116から可動型繋留装置を延出させることができる。このような延出の際に、前進ユニット118に関連するエンコーダ等の好適な検出器を用いて、可動型繋留装置を延出させる距離を監視すればよい。その距離をフィードバックループにてコントロールユニット122に送ることもできる。
【0023】
可動型繋留装置が所望の程度に延出したら、コントロールユニット122は延出を停止し、吸引源124にコントロールコマンドを送って、図4Dに示すのと同様の方法で可動型繋留装置に吸引力を加え、可動型繋留装置を管路壁部に留めるようにすることができる。ここでも、コントロールユニット122は、繋留を確保するのに十分強く、しかも、管路壁部に損傷を与えるほど強くはならないように、慎重に吸引力を制御すればよい。また、コントロールユニット122は、吸引源124にコントロールコマンドを送って、図4Eに示すのと同様の方法で固定型繋留装置に吸引力を加えるのを停止し、管路壁部から固定型繋留装置を離すことができる。
【0024】
そして、コントロールユニット122は、前進ユニット118にコントロールコマンドを送って、図4Fに示すのと同様の方法で、モータ120により可動型繋留装置を内視鏡シャフト116に対して後退させることができる。可動型繋留装置を後退させる距離は、延出の場合と同様にコントロールユニット122により監視すればよい。
【0025】
このとき、内視鏡112は管路内を前進した状態であり、所望により、システム110によってこのプロセスを繰り返し、このような前進を続けることができる。なお、図8のシステム110は、自動前進ユニット118と、コントロールユニット122と、吸引源124とを含む個々の構成要素を備えるものとして示されているが、これら構成要素のうちの1以上を一体化して単一装置としてもよい。このような装置は、図8中、ユニット118を内視鏡112に結合した状態で示したように、内視鏡に結合してもよく、また、内視鏡から独立していてもよい。後者の場合、他の装置が、繋留装置や繋留装置が加える吸引力を制御する間に、内視鏡検査医が内視鏡を持って操作することができる。
【産業上の利用可能性】
【0026】
種々の医療用途について説明してきたが、本開示の前進装置は、産業用途等、他の用途で使用する内視鏡装置にも適用可能であることがわかる。
【背景技術】
【0001】
現在、内視鏡は、医学で病気の診断や外科手術を行うために一般的に使用されている。内視鏡の一般的な用途は消化器系においてである。例えば、内視鏡を口や食道を介して胃内に通す、あるいは、肛門を介して結腸内に通すことが多い。あいにく、小腸等、消化器系のより深い部分に到達するのは、それよりも難しい。具体的には、小腸の様々な捻じれ部分や曲がり部分を通して内視鏡を前進させるのは難しい場合がある。
【0002】
本開示は、以下の図面を参照することにより、理解しやすくなるであろう。図中、同じ参照番号は全図にわたって対応する部分を示す。なお、図面は必ずしも一定の縮尺で描かれたものではない。
【図面の簡単な説明】
【0003】
【図1】図1は、内視鏡の一実施形態の側面図である。
【図2】図2は、図1の内視鏡の先端部の斜視図である。
【図3】図3は、図2の先端部の側面図であって、内視鏡の繋留装置の内部を示す図である。
【図4A】図4Aは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図4B】図4Bは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図4C】図4Cは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図4D】図4Dは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図4E】図4Eは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図4F】図4Fは、図2及び図3に示す繋留装置を用いて、図1の内視鏡が管路を前進する様子を連続して示す概略図である。
【図5A】図5Aは、内視鏡装置に付加可能な内視鏡前進装置を示す図である。
【図5B】図5Bは、内視鏡装置に付加可能な内視鏡前進装置を示す図である。
【図6】図6は、繋留装置の吸引ヘッドの一実施形態を示す斜視図である。
【図7】図7は、組織に繋留した状態の、図6の吸引ヘッドの断面図である。
【図8】図8は、管路内で内視鏡を自動的に前進させるシステムの一実施形態を示す概略図である。
【発明を実施するための形態】
【0004】
以下、体内管路等の管路内で内視鏡を前進させるのに使用可能な装置を開示する。いくつかの実施形態において、内視鏡は、管路内で内視鏡を前進させるのに使用可能な一体型装置を備える。他の実施形態においては、それ自体では他の前進装置を備えていない内視鏡(付属部品取付型の場合)に、独立型の内視鏡前進装置を設ける。いずれの場合も、本装置は、管路内の適切な場所に内視鏡を確保するとともに管路を通して内視鏡を引っぱり出す繋留装置を備えている。いくつかの実施形態において、本装置は、固定型吸引部と、延出可能かつ後退可能な吸引部とを備え、これらの吸引部を交互に用いて、管路内で内視鏡を前進させる。
【0005】
図1は、内視鏡10を示す。内視鏡10は本体12を備え、本体12からは、人体における内腔等、管路内への挿入及び前進を行うための細長シャフト14が延びている。いくつかの実施形態において、シャフト14は、小腸内への挿入及び前進を行うための可撓性チューブである。図1に示すように、シャフト14は、終端が先端部16となっている。いくつかの実施形態において、先端部16は、内視鏡本体12に設けられる好適な調節部を用いて手動で繋ぐこともできる。
【0006】
次に図2を参照して、細長シャフト14の先端部16を詳細に示す。図2に示すように、シャフト14は全体として断面が円形であり、第1の側18と、この第1の側の反対側である第2の側20とを有しているとも言える。図2に示すシャフト14の向きでは、第1の側18はシャフトの下側であり、第2の側20はシャフトの上側であると考えることができる。先端部16に隣接するシャフト14の第1の側18には、後述のように管路内で内視鏡10を前進させるのに使用される第1の繋留装置の一部を構成する吸引口22が設けられている。作業チャネル24がシャフト14内を通って先端部16まで延びており、作業チャネル24内には、管路内で内視鏡10を前進させるのに使用される第2の繋留装置26が設けられている。図2の実施形態において、第2の繋留装置26は、吸引口32を有する吸引ヘッド30を終端とする細長チューブ28を備えている。吸引口32は、チューブの内腔34と流体的に連通(流体連通)している(図3参照)。
【0007】
次に図3を参照して、細長シャフト14に含まれる第1の繋留装置36を示す。図3からわかるように、第1の繋留装置36は、第2の繋留装置26と同様の構成である。したがって、第1の繋留装置36は、吸引ヘッド40を終端とする細長チューブ38を備えている。吸引ヘッド40は吸引口22を備え、吸引口22は、チューブ38の内腔42と流体連通している。
【0008】
第1の繋留装置36は細長シャフト14に対して固定されているが、第2の繋留装置26は、矢印44で示すように、作業チャネル24から延出可能、かつ、作業チャネル24内に後退可能である。したがって、第1の繋留装置36を固定型繋留装置と呼び、第2の繋留装置26を可動型、延出可能及び/又は後退可能繋留装置と呼ぶことができる。以下に説明するように、吸引ヘッド30及び40は、内視鏡10を前進させる管路の壁部に繋留装置26及び36を留めるために、組織を引き込むように機能する(破線矢印を参照)。
【0009】
図4A〜図4Fは、管路46内における内視鏡10の前進状態を示す。例として、管路46は小腸の内腔により構成される。まず、図4Aにて、内視鏡10を管路46内に導入する。そして、第1の繋留装置の吸引口22が、管路を画定する壁部48に近接して配置されるように、内視鏡10を操作する。次に、図4Bにて、内視鏡10を壁部48に引きつける、及び/又は、壁部を内視鏡に引きつけるように、第1の繋留装置に吸引を行う。壁部に可撓性がある場合、図4Bに示すように、壁部48の一部を吸引口22に引き込んでもよい。このとき、内視鏡10は壁部48に繋留される。
【0010】
上述のようにして内視鏡10を壁部48に繋留したら、図4Cに示すように、第2の繋留装置26を内視鏡から延出させることができる。特に、第2の繋留装置26は、内視鏡先端部16に対して遠位であって、繋留装置の吸引口30が壁部48と反対側の壁部50に隣接して配置される位置まで、手動により又は自動的に延出する。いくつかの実施形態において、第2の繋留装置26は、壁部50に近接して吸引ヘッド30を容易に配置できるような自然曲率及び/又はバイアスを有していればよい。
【0011】
次に図4Dを参照して、第2の繋留装置を壁部50に引きつける、及び/又は、壁部を第2の繋留装置に引きつけるように、第2の繋留装置26に吸引を行う。壁部50に可撓性がある場合、図4Dに示すように、壁部の一部を吸引ヘッド30の吸引口32に引き込んでもよい。このとき、シャフト14は管路46の対向する壁部48、50に確実に繋留される。
【0012】
次に、図4Eに示すように、壁部48から内視鏡10を解放するように、第1の繋留装置36への吸引を停止する。任意に空気又は他の流体を吹き込むことにより、この解放を促進してもよい。内視鏡10が解放されたら、第2の繋留装置26をシャフト14内に後退させることができる。第2の繋留装置26は、まだ壁部50に繋留されているので、この「後退」は、実際には、図4Fに示すように、管路46内で第2の繋留装置の吸引ヘッド30の方向に内視鏡10を前進させることになる。小腸の場合、腸の柔軟性と可動性によって、腸に対する吸引ヘッド30の繋留位置に向かって内視鏡が移動するのではなく、腸が内視鏡10に向かって、ある程度移動することもある。いずれにしても、相対移動が行われ、内視鏡10は事実上、管路46内を適切に前進する。
【0013】
この時点で、内視鏡10は、管路46内を一定距離、前進している。そして、第1の繋留装置36に再び吸引を行って、管路46内の新たな位置に内視鏡10を留める。さらに前進を行う場合、第2の繋留装置26に対して行った吸引を解除して、壁部50から第2の繋留装置を解放してから、管路46内の所望位置まで内視鏡10が前進するまで、図4B〜図4Fにて説明したプロセスを繰り返せばよい。
【0014】
上述の実施形態において、内視鏡は、一体型の前進手段を備えているので、自己前進型内視鏡により構成されていると考えることができる。しかし、他の実施形態においては、同様の動作を可能にするために、非自己前進型内視鏡に独立型の前進手段を設けることができる。図5A及び図5Bは、このような前進手段で、内視鏡60の外装部とともに使用される前進手段の一例を示す。図示のように、第1及び第2の繋留装置62及び64は、内視鏡60とそのシャフト61の外装部に設けられる。繋留装置62、64は、それぞれ、吸引口68を有する吸引ヘッド66と、吸引ヘッドまで延在するチューブ70とを備えている。第1の繋留装置62は、内視鏡60に対して移動しないので、固定型繋留装置と称してもよい。これに対して、第2の繋留装置64は内視鏡シャフト先端部71に対して延出及び後退するので、可動型、延出可能及び/又は後退可能繋留装置と称してもよい。繋留装置62及び64の接続については、第1の繋留装置62を確実に固定し、第2の繋留装置64をシャフト61に対して軸方向に平行移動させることができるならば、いずれの方法であってもよい。いくつかの実施形態において、生体適合性バンド又はクリップ72を用いて、繋留装置62及び64を内視鏡シャフト61に接続する。
【0015】
上述のように、本開示の内視鏡は、小腸等、体内の管路内を通るのに使用することができる。このような用途において、繋留装置は、腸の末端の粘膜に対して着脱可能である。用いる吸引力は、内視鏡を思うように動かせるくらい強いが、粘膜の裂傷やその他の損傷を生じるほど強くはならないように選択する。例えば、完全な吸引状態でも、損傷を生じずに繋留装置を粘膜から強制的に引き離すことができるように、吸引力を選択する。いくつかの実施形態において、2ニュートン(N)〜5Nの吸引力を腸壁に加える。
【0016】
図6は、上述の繋留装置と同様の繋留装置を構成するのに使用できる例示吸引ヘッド80を示す。図6の実施形態において、吸引ヘッド80は、全体として円筒形の本体82を備えている。本体82の端部には、内腔内の繋留装置の通過を容易にする丸みのある(例えば、半球状)先端部84がある。本体82の外面86には、へこみ又は窪み部88を含む吸引口が形成されている。いくつかの実施形態において、窪み部88は全体として円形であり、凹状曲面を備えている。他の実施形態においては、窪み部は全体として半球状である。窪み部88内には、吸引ヘッド80内に形成された内管路92と流体連通している穴90が形成されている(図7参照)。図示の実施形態において、穴90は、直線状端部94と円弧状端部96により画定されている。
【0017】
本体90の基部からは、円筒状取付チューブ98が延びており、このチューブ98は、吸引ヘッド80に吸引を行う対応チューブ100によって受け止められる(図7参照)。いくつかの実施形態において、本体90と取付チューブ98は、アルミニウム等の金属等、単一材料により一体的に構成される。
【0018】
図7は、吸引ヘッド80の使用状態を示す。より詳細には、図7は、吸引ヘッド80を使用して、窪み部88及び穴90に小腸壁等の組織102を引き込むことによって、吸引ヘッドを組織に繋留する様子を示す。図示のように、組織102は吸引ヘッド80内に深く引き込まれ(参照番号104で示す)、強力な繋留を確保することができる。組織102には柔軟性と弾力性があるため、組織に加えられた吸引力が適切に管理されている限り、このような引き込みによって組織が損傷を受けることはない。
【0019】
いくつかの実施形態において、内視鏡の前進を自動化することができる。具体的には、内視鏡検査医が吸引力の付加や解除、あるいは、繋留装置の延出や後退を手動で行わなくてもいいように、内視鏡を前進させるのに使用する装置を機械化してもよい。図8は、小腸等の管路内の内視鏡前進を自動制御する例示システム110を概略的に示す。図8に示すように、システム110は、内視鏡10と同様に本体114と本体から外方に延びる可撓性シャフト116とを備える内視鏡112を有している。説明の都合上、内視鏡112は、図2及び図3にて説明した繋留装置26及び36等の一体型前進装置を備えているものとする。したがって、図8中、この前進装置は見えない状態にある。
【0020】
さらに、システム110は、自動前進ユニット118を備えている。本例において、自動前進ユニット118は、内視鏡112の本体114に取り付けられている。自動前進ユニット118は、少なくとも内視鏡112の可動型繋留装置に接続され、コントロールユニット122が受け取るコマンドに従って可動型繋留装置の延出又は後退を行うように構成されたサーボモータ等のモータ120を備えている。図示の実施形態では、コントロールユニット122は、適切なコントロールソフトウェアを実行するデスクトップコンピュータからなる。また、システム110は、コントロールユニット122により制御されて、内視鏡112の繋留装置に所定レベルの吸引力を与える専用吸引源124を備えている。例として、吸引源124は、吸引を発生させる1以上のポンプからなる。
【0021】
外科手術処置の際に、システム110を用いて、内視鏡112の前進を自動化することができる。執刀医によって内視鏡シャフト116が管路内の所望位置に配置されてから、システム110を作動させて前進を自動化することができる。そして、コントロールユニット122がコントロールコマンドを吸引源124に送り、固定型繋留装置に吸引力を与え、図4Bに示すような方法で管路壁部に固定型繋留装置を留める。なお、管路壁部(例えば、小腸壁)に加える吸引力の量は、固定型繋留装置内の圧力を監視し、必要に応じて真空度を加減することにより制御する。例として、吸引源124、前進ユニット118、あるいは繋留装置と関連する1以上のセンサ(図示せず)で圧力を検知し、フィードバックループにて圧力の値をコントロールユニット122に送ればよい。その情報により、コントロールユニット122は、繋留を確保するのに十分強く、しかも、管路壁部に損傷を与えるほど強くはならないように、慎重に吸引力を制御すればよい。
【0022】
次に、コントロールユニット122は、自動前進ユニット118にコントロールコマンドを送って、図4Cに示すのと同様の方法で、モータ120に内視鏡シャフト116から可動型繋留装置を延出させることができる。このような延出の際に、前進ユニット118に関連するエンコーダ等の好適な検出器を用いて、可動型繋留装置を延出させる距離を監視すればよい。その距離をフィードバックループにてコントロールユニット122に送ることもできる。
【0023】
可動型繋留装置が所望の程度に延出したら、コントロールユニット122は延出を停止し、吸引源124にコントロールコマンドを送って、図4Dに示すのと同様の方法で可動型繋留装置に吸引力を加え、可動型繋留装置を管路壁部に留めるようにすることができる。ここでも、コントロールユニット122は、繋留を確保するのに十分強く、しかも、管路壁部に損傷を与えるほど強くはならないように、慎重に吸引力を制御すればよい。また、コントロールユニット122は、吸引源124にコントロールコマンドを送って、図4Eに示すのと同様の方法で固定型繋留装置に吸引力を加えるのを停止し、管路壁部から固定型繋留装置を離すことができる。
【0024】
そして、コントロールユニット122は、前進ユニット118にコントロールコマンドを送って、図4Fに示すのと同様の方法で、モータ120により可動型繋留装置を内視鏡シャフト116に対して後退させることができる。可動型繋留装置を後退させる距離は、延出の場合と同様にコントロールユニット122により監視すればよい。
【0025】
このとき、内視鏡112は管路内を前進した状態であり、所望により、システム110によってこのプロセスを繰り返し、このような前進を続けることができる。なお、図8のシステム110は、自動前進ユニット118と、コントロールユニット122と、吸引源124とを含む個々の構成要素を備えるものとして示されているが、これら構成要素のうちの1以上を一体化して単一装置としてもよい。このような装置は、図8中、ユニット118を内視鏡112に結合した状態で示したように、内視鏡に結合してもよく、また、内視鏡から独立していてもよい。後者の場合、他の装置が、繋留装置や繋留装置が加える吸引力を制御する間に、内視鏡検査医が内視鏡を持って操作することができる。
【産業上の利用可能性】
【0026】
種々の医療用途について説明してきたが、本開示の前進装置は、産業用途等、他の用途で使用する内視鏡装置にも適用可能であることがわかる。
【特許請求の範囲】
【請求項1】
本体と、
前記本体から延びて先端部で終わる細長シャフトと、
前記細長シャフトに固定される第1の繋留装置と、
前記細長シャフトから延出可能な第2の繋留装置と
を備えることを特徴とする内視鏡。
【請求項2】
各繋留装置は吸引口を有する吸引ヘッドを備えることを特徴とする請求項1に記載の内視鏡。
【請求項3】
各繋留装置は、さらに、前記吸引口と流体連通する内腔を有する細長チューブを備えることを特徴とする請求項2に記載の内視鏡。
【請求項4】
前記第1の繋留装置の吸引口は第1の方向を向き、前記第2の繋留装置の吸引口は前記第1の方向と反対の第2の方向を向くことを特徴とする請求項2に記載の内視鏡。
【請求項5】
前記第1及び第2の方向はいずれも、前記細長シャフトから放射状に外方を向くことを特徴とする請求項4に記載の内視鏡。
【請求項6】
前記細長シャフト内に設けられた作業チャネルをさらに備え、前記第2の繋留装置が、前記作業チャネル内に設けられるとともに前記作業チャネルから延出可能であることを特徴とする請求項1に記載の内視鏡。
【請求項7】
内視鏡の細長シャフトに固定される第1の繋留装置と、
前記細長シャフトから軸方向に延出可能となるように細長シャフトの反対側に取り付けられる第2の繋留装置と
を備えることを特徴とする内視鏡前進装置。
【請求項8】
各繋留装置は吸引口を有する吸引ヘッドを備えることを特徴とする請求項7に記載の前進装置。
【請求項9】
各繋留装置は、さらに、前記吸引口と流体連通する内腔を有する細長チューブを備えることを特徴とする請求項8に記載の前進装置。
【請求項10】
前記第1の繋留装置の吸引口は第1の方向を向き、前記第2の繋留装置の吸引口は前記第1の方向と反対の第2の方向を向くことを特徴とする請求項8に記載の前進装置。
【請求項11】
前記第1及び第2の方向はいずれも、前記細長シャフトから放射状に外方を向くことを特徴とする請求項10に記載の前進装置。
【請求項12】
前記細長シャフトに前記第1及び第2の繋留装置を接続する接続部をさらに備えることを特徴とする請求項7に記載の前進装置。
【請求項13】
前記接続部はバンド又はクリップからなることを特徴とする請求項12に記載の前進装置。
【請求項14】
管路内で内視鏡を自動的に前進させるシステムであって、
前記内視鏡に対して固定される第1の繋留装置と、
前記内視鏡に対して軸方向に延出可能かつ後退可能な第2の繋留装置と、
前記第2の繋留装置を延出及び後退させるモータと、
前記第1及び第2の繋留装置に吸引力を与える吸引源と、
前記第2の繋留装置の延出及び後退と、前記第1及び第2の繋留装置への吸引力の付加が自動的に制御されるように、前記モータ及び前記吸引源を制御するコントロールユニットと
を備えることを特徴とするシステム。
【請求項15】
前記第1及び第2の繋留装置は前記内視鏡の一体部分により構成されることを特徴とする請求項14に記載のシステム。
【請求項16】
前記第1及び第2の繋留装置は前記内視鏡に付属部品として取り付けられることを特徴とする請求項14に記載のシステム。
【請求項17】
前記モータは前記内視鏡に取り付けられるユニットの一部を構成することを特徴とする請求項14に記載のシステム。
【請求項18】
前記繋留装置のうちの少なくとも一方の内部の圧力を検出するセンサをさらに備え、前記コントロールユニットは、前記検出された圧力を用いて、前記吸引源により与えられる吸引力の量を制御することを特徴とする請求項14に記載のシステム。
【請求項19】
前記第2の繋留装置の延出距離を検知する検出器をさらに備え、前記コントロールユニットは、前記検知された距離を用いて、前記第2の繋留装置の延出及び後退を制御することを特徴とする請求項14に記載のシステム。
【請求項20】
管路内で内視鏡を前進させる方法であって、
(a)前記内視鏡に関連する第1の繋留装置を前記管路の壁部に近接して配置し、
(b)前記第1の繋留装置に吸引を行って、前記管路壁部に前記第1の繋留装置を留め、
(c)前記内視鏡に関連する第2の繋留装置を延出させて、前記内視鏡に対して遠位の位置にて、前記第2の繋留装置を前記管路壁部に近接して配置し、
(d)前記第2の繋留装置に吸引を行って、前記第2の繋留装置を前記管路壁部に留め、
(e)前記第1の繋留装置に対して行った吸引を低減して、前記第1の繋留装置を前記管路壁部から解放し、
(f)前記第2の繋留装置を前記内視鏡に対して後退させ、前記管路内で前記内視鏡を前進させる
ことを特徴とする方法。
【請求項21】
さらに、前記第2の繋留装置に対して行った吸引を低減して、前記第2の繋留装置を前記管路壁部から解放した後、ステップ(a)〜(f)を繰り返して、前記管路内で前記内視鏡をさらに前進させることを特徴とする請求項20に記載の方法。
【請求項22】
前記管路は小腸であることを特徴とする請求項20に記載の方法。
【請求項23】
前記第2の繋留装置の延出及び後退と、吸引の付加は、吸引力と第2の繋留装置位置とを監視するコントロールユニットにより自動的に制御されることを特徴とする請求項20に記載の方法。
【請求項1】
本体と、
前記本体から延びて先端部で終わる細長シャフトと、
前記細長シャフトに固定される第1の繋留装置と、
前記細長シャフトから延出可能な第2の繋留装置と
を備えることを特徴とする内視鏡。
【請求項2】
各繋留装置は吸引口を有する吸引ヘッドを備えることを特徴とする請求項1に記載の内視鏡。
【請求項3】
各繋留装置は、さらに、前記吸引口と流体連通する内腔を有する細長チューブを備えることを特徴とする請求項2に記載の内視鏡。
【請求項4】
前記第1の繋留装置の吸引口は第1の方向を向き、前記第2の繋留装置の吸引口は前記第1の方向と反対の第2の方向を向くことを特徴とする請求項2に記載の内視鏡。
【請求項5】
前記第1及び第2の方向はいずれも、前記細長シャフトから放射状に外方を向くことを特徴とする請求項4に記載の内視鏡。
【請求項6】
前記細長シャフト内に設けられた作業チャネルをさらに備え、前記第2の繋留装置が、前記作業チャネル内に設けられるとともに前記作業チャネルから延出可能であることを特徴とする請求項1に記載の内視鏡。
【請求項7】
内視鏡の細長シャフトに固定される第1の繋留装置と、
前記細長シャフトから軸方向に延出可能となるように細長シャフトの反対側に取り付けられる第2の繋留装置と
を備えることを特徴とする内視鏡前進装置。
【請求項8】
各繋留装置は吸引口を有する吸引ヘッドを備えることを特徴とする請求項7に記載の前進装置。
【請求項9】
各繋留装置は、さらに、前記吸引口と流体連通する内腔を有する細長チューブを備えることを特徴とする請求項8に記載の前進装置。
【請求項10】
前記第1の繋留装置の吸引口は第1の方向を向き、前記第2の繋留装置の吸引口は前記第1の方向と反対の第2の方向を向くことを特徴とする請求項8に記載の前進装置。
【請求項11】
前記第1及び第2の方向はいずれも、前記細長シャフトから放射状に外方を向くことを特徴とする請求項10に記載の前進装置。
【請求項12】
前記細長シャフトに前記第1及び第2の繋留装置を接続する接続部をさらに備えることを特徴とする請求項7に記載の前進装置。
【請求項13】
前記接続部はバンド又はクリップからなることを特徴とする請求項12に記載の前進装置。
【請求項14】
管路内で内視鏡を自動的に前進させるシステムであって、
前記内視鏡に対して固定される第1の繋留装置と、
前記内視鏡に対して軸方向に延出可能かつ後退可能な第2の繋留装置と、
前記第2の繋留装置を延出及び後退させるモータと、
前記第1及び第2の繋留装置に吸引力を与える吸引源と、
前記第2の繋留装置の延出及び後退と、前記第1及び第2の繋留装置への吸引力の付加が自動的に制御されるように、前記モータ及び前記吸引源を制御するコントロールユニットと
を備えることを特徴とするシステム。
【請求項15】
前記第1及び第2の繋留装置は前記内視鏡の一体部分により構成されることを特徴とする請求項14に記載のシステム。
【請求項16】
前記第1及び第2の繋留装置は前記内視鏡に付属部品として取り付けられることを特徴とする請求項14に記載のシステム。
【請求項17】
前記モータは前記内視鏡に取り付けられるユニットの一部を構成することを特徴とする請求項14に記載のシステム。
【請求項18】
前記繋留装置のうちの少なくとも一方の内部の圧力を検出するセンサをさらに備え、前記コントロールユニットは、前記検出された圧力を用いて、前記吸引源により与えられる吸引力の量を制御することを特徴とする請求項14に記載のシステム。
【請求項19】
前記第2の繋留装置の延出距離を検知する検出器をさらに備え、前記コントロールユニットは、前記検知された距離を用いて、前記第2の繋留装置の延出及び後退を制御することを特徴とする請求項14に記載のシステム。
【請求項20】
管路内で内視鏡を前進させる方法であって、
(a)前記内視鏡に関連する第1の繋留装置を前記管路の壁部に近接して配置し、
(b)前記第1の繋留装置に吸引を行って、前記管路壁部に前記第1の繋留装置を留め、
(c)前記内視鏡に関連する第2の繋留装置を延出させて、前記内視鏡に対して遠位の位置にて、前記第2の繋留装置を前記管路壁部に近接して配置し、
(d)前記第2の繋留装置に吸引を行って、前記第2の繋留装置を前記管路壁部に留め、
(e)前記第1の繋留装置に対して行った吸引を低減して、前記第1の繋留装置を前記管路壁部から解放し、
(f)前記第2の繋留装置を前記内視鏡に対して後退させ、前記管路内で前記内視鏡を前進させる
ことを特徴とする方法。
【請求項21】
さらに、前記第2の繋留装置に対して行った吸引を低減して、前記第2の繋留装置を前記管路壁部から解放した後、ステップ(a)〜(f)を繰り返して、前記管路内で前記内視鏡をさらに前進させることを特徴とする請求項20に記載の方法。
【請求項22】
前記管路は小腸であることを特徴とする請求項20に記載の方法。
【請求項23】
前記第2の繋留装置の延出及び後退と、吸引の付加は、吸引力と第2の繋留装置位置とを監視するコントロールユニットにより自動的に制御されることを特徴とする請求項20に記載の方法。
【図1】

【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図4F】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【公表番号】特表2012−522592(P2012−522592A)
【公表日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2012−503693(P2012−503693)
【出願日】平成22年4月1日(2010.4.1)
【国際出願番号】PCT/US2010/029579
【国際公開番号】WO2010/114972
【国際公開日】平成22年10月7日(2010.10.7)
【出願人】(507371168)ユニバーシティ オブ フロリダ リサーチ ファンデーション インコーポレーティッド (38)
【Fターム(参考)】
【公表日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成22年4月1日(2010.4.1)
【国際出願番号】PCT/US2010/029579
【国際公開番号】WO2010/114972
【国際公開日】平成22年10月7日(2010.10.7)
【出願人】(507371168)ユニバーシティ オブ フロリダ リサーチ ファンデーション インコーポレーティッド (38)
【Fターム(参考)】
[ Back to top ]