
管路探査法
【課題】
発明の目的
本発明は、塩化ビニルなど非導電性の地中埋設管路の探査法を提供することを目的とする。特に、光ケーブル用管路など通常の状態で管路内に空隙がある樹脂製の管路を対象とする。
【解決手段】
管路が埋設された地表を探査装置を走査させ、探査装置から地中に照射されたレーダ波の反射の測定を、地中に埋設された管路に水等の導電性の液体を注入しての測定と、管路に水等を注入することなく行う測定の二回行なう。両測定の測定データの差分を取ることにより、管路以外の地中の不均一な構造によるレーダ波の反射を打ち消され、管路による反射を強調することが可能となる。差分を計算する際、相関等の方法により1回目の測定と2回目の測定の時の測定装置の移動の差による影響を除去することが可能となる。
発明の目的
本発明は、塩化ビニルなど非導電性の地中埋設管路の探査法を提供することを目的とする。特に、光ケーブル用管路など通常の状態で管路内に空隙がある樹脂製の管路を対象とする。
【解決手段】
管路が埋設された地表を探査装置を走査させ、探査装置から地中に照射されたレーダ波の反射の測定を、地中に埋設された管路に水等の導電性の液体を注入しての測定と、管路に水等を注入することなく行う測定の二回行なう。両測定の測定データの差分を取ることにより、管路以外の地中の不均一な構造によるレーダ波の反射を打ち消され、管路による反射を強調することが可能となる。差分を計算する際、相関等の方法により1回目の測定と2回目の測定の時の測定装置の移動の差による影響を除去することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、いわゆる電磁式の管路探査法に属するものであり、塩化ビニルなど非導電性の地中埋設管路の探査法を提供することを目的とする。特に、光ケーブル用管路など通常の状態で管路内に空隙がある樹脂製の管路を対象とするものである。
【背景技術】
【0002】
非金属埋設管は導電率が低いため、金属管路の探知で一般的に使用される方法、すなわち埋設管路に電流を流し、この電流により埋設管路の周囲に発生する誘導磁界を地表において検出し、これより埋設管路の位置及び深度を測定する方法を採用することができなかった。そこで、非金属埋設管の探知においては、従来は、埋設管路に付設した振動発振器より振動(例えば400Hz)を発生させ、地中を伝播してきた振動音を地表において検出し、これより埋設管路の位置を測定する方法(音波探知方法)、あるいは、地表に設置したレーダー装置のアンテナより地中に向けて電磁波を発射し、埋設管路において反射してきた電磁波を地表において受信機により捕捉し、これより埋設管路の位置及び深度を測定する方法(レーダー探知方法)が採用されてもいた。
【0003】
上記音波探知方法では、埋設管路の深度を測定することができないばかりか、音波が地表に届くまでに減衰するので、深度が2m以上になると探知が困難になるという問題があった。
地中レーダを用いれば管種を問わずに管路からの反射信号を得られるものの、樹脂製の管では反射強度が弱く、良好な探査が可能な管径や埋設深さが限られている。さらに、周囲に礫や地層の乱れ、金属管等がある場合、これらによる反射信号の中から樹脂製の管路からの反射信号を特定することは、樹脂製の管路からの反射信号が弱いために極めて困難である。
【0004】
探査方法の改良として、探知区間の埋設管路内に導電性を有する塩水を注入し、この導電性を有する塩水に電流を流し、電流によって発生する誘導磁界を地表で検出し、埋設管路の位置及び深度を測定する方法が特開平11−160451号公報に開示されている。
【特許文献1】特開平11−160451号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、通信ケーブル用管路などでは、車両が通行する場所、路肩、あるいは中央分離帯など地上の状態に応じて管路の材質が変えられていることが多い。このような場合、両側を金属製の管路に挟まれて樹脂製管路が存在する状況が発生する。このような場合、測定対象である管路に塩水を注入し、電流を流しても金属製の管路部分から地中に電流が漏洩してしまうために、樹脂製の管路部分に探査に十分な電流を流すことはできない状況が発生する。
本発明は、両側を金属製の管路に挟まれている、周囲に礫が多い、金属性管路が存在するなどの状況に左右されない樹脂製管路探査法を提供するものである。
【課題を解決するための手段】
【0006】
本発明の探査方法の概要は以下の通りである。
(1) 地中レーダによる従来の探査と同様に、管路を横断する方向にレーダアンテナを走査しながら地中からの反射信号を受信する方法で探査データを取得する。
(2) 管路に導電性の液体、例えば水を注入して、上記(1)と同じ経路に沿ってアンテナを移動して探査データを取得する。
(3) 注水時と非注水時の探査データの差分を求める。
上記の方法により、対象とする樹脂製管路からの反射信号を強調して取り出すことが可能になる。
【0007】
さらに、
(4) 探査対象管路からの反射信号が存在しない区間の受信データを比較することよって、注水時と非注水時の受信データ取得位置の差を補正しながら、探査データの差分を求める。
【発明の効果】
【0008】
本発明によれば、従来の方法では探査が不可能であった、両側を金属製の管路に挟まれている、周囲に礫が多い、金属性管路が存在するなどの状況においても樹脂製管路を効果的に探査することが可能になる。かつ、作業員の人的な要因や地表の状態に起因するアンテナ移動の不均一による注水時と非注水時の反射信号取得位置の差を補正することにより、測定対象管路からの反射信号を良好に取り出すことができる。
【実施例】
【0009】
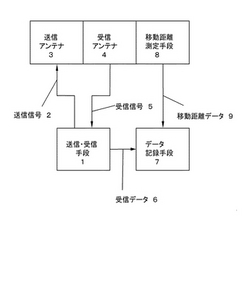
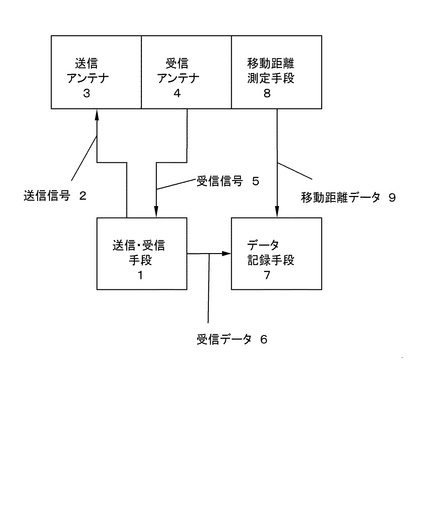
第1図は本発明に係る測定系の構成を示す図である。
送信・受信手段1は送信アンテナ3に送信信号2を送る。また、送信信号2の送出を基準時刻として受信アンテナ4から送られてくる受信信号5をデジタルデータに変換し、変換したデータを受信データ6としてデータ記録手段7に送る。移動距離測定手段8は測定開始時等、適当な開始時刻から測定装置が移動した距離を測定するものであり、測定した移動距離を移動距離データ9としてデータ時記録手段7に送る。データ記録手段7は受信データ6を受信した時刻の移動距離と当該受信データを対応させて記録する。
【0010】
第1図に示される構成の測定系を用いて、探査対象である管路が埋設されている地中に向けて、地表から送信信号を発射し、地中からの反射波を受信アンテナにより受信し記録する。探査対象である管路に注水する前と注水した後の二回、同じアンテナ移動経路に沿って受信データを記録する。非注水管路に対する探査と注水管路に対する探査を行う順番は任意である。
探査対象である管路が送信電波をほとんど反射することがない樹脂製であっても、管路に水等、電波を反射する特性を有する液体を注入することにより、注入前と注入後では受信データが異なってくる。従って、注水時の受信データと非注水時の受信データの差分である差分データを求め、この差分データを適当な方法で画像化すれば、測定対象である樹脂製管路からの反射信号を強調した画像が得られる。
【0011】
第2図は測定対象の管路20に水を注入せず、非注水時の受信データを記録する状況を示すものであり、第3図は測定対象の管路20に水を注入し、管を導電状態とした状態で、第2図に示される非注水時と同じアンテナ移動経路に沿って受信データを記録する状況を示すものである。地中に埋設された探査対象の管路20上の地表を一定の速度で探査装置を移動させ、探査装置の送信アンテナからレーダ波を地中に向けて照射する。地中の構造に対応して照射されたレーダ波の反射量が変化する。地中からの反射レーダ波を探査装置の受信アンテナで受信する。移動距離測定手段8は探査装置が地表を移動した距離を測定しデータ記録手段7に送信する。データ記録手段7は送受信手段1から送られてくる受信レーダ波の信号と時刻情報及び移動距離測定手段8からの距離信号を記録する。探査対象の管路20に注水しない状態と管路20に注水した状態で、探査装置を同じ移動経路上を同じ移動速度で移動させ上記の測定を行う。
【0012】
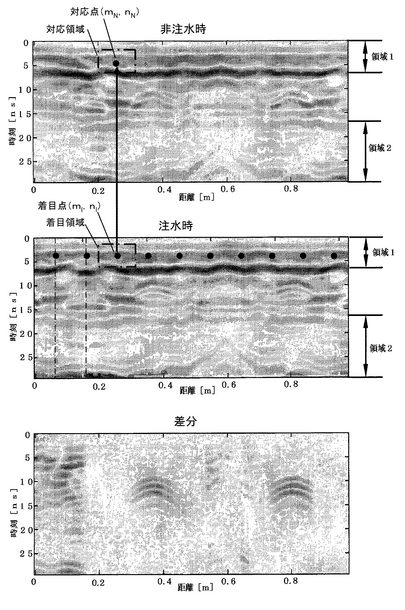
第4図には、探査対象の管路に注水しない状態(非注水時)で受信された反射レーダ波と、管路に注水した状態での反射レーダ波を画像化した例と、両データの差分が示されている。
【0013】
受信データの位置合わせ法
通常の地中レーダでは、等価的なサンプリングレートは10GHzから数10GHzである。サンプリング周期0.05 ns(20 GHz)は、空気中での電磁波の往復距離にして7.5 mmに相当する。したがって、地表面の起伏の差や草の根等の状況によって、対応する非注水時と注水時の受信データで、遅延時間に1サンプリング周期程度のずれが発生する可能性がある。また、フィールドにおける探査では、地表面の状態やアンテナの移動操作の違いなどの原因により、注水時と非注水時の探査における探査開始位置、地表面からのアンテナの高さを含めて探査の経路を全く同じにすることはできず、非注水時と注水時とで測定装置を同じ経路を同じ速度で移動されることは実際上不可能である。
【0014】
したがって、探査対象である管路以外からの反射による受信信号をできる限り除去して、探査対象管路からの非注水時と注水時の受信データの差分を得るためには、送受信データの位置の誤差、遅延時間の誤差を補正して差分を求める必要がある。
【0015】
探査によって得られた非注水時の受信データを SN=[sN(m, n)]、m=0, … M-1; n=0, … NN-1 とし、および注水時の受信データを SI=[sI(m, n)]、m=0, … M-1; n=0, … NI-1 とする。ただし、sN(m, n)、sI(m, n) はそれぞれ、測定位置nの受信遅延時間mにおける非注水時および注水時の受信データである。また、非注水時の受信データに対応する探査位置を PN(n)、注水時の受信データに対応する探査位置を PI(n) とする。ここで、受信遅延時間とは、送信・受信手段の内部的な送信信号発生時刻などを起点として、当該受信データを受信するまでの遅延時間である。
【0016】
既に説明したように、注水時と非注水時でほぼ同じ移動経路に沿ってアンテナを移動したとしても、受信データsN(m, n)と受信データsI(m, n)とは必ずしも対応しない。まず、知ることができるのは探査開始位置からの移動距離だけである。したがって、測定開始位置がずれている可能性がある。さらに、地表面の状況によって移動距離計測手段の計測する移動距離に差が生ずる可能性がある。例えば、車輪の回転数を移動距離に変換するような移動距離計測手段の場合、車輪の滑り具合によって移動距離自体に誤差が生ずる可能性がある。移動距離方向の位置合わせは、全体的な位置合わせだけでなく、局所的に見た位置合わせが必要である。遅延時間方向についても位置合わせが必要である。遅延時間については、時間差が生じる原因はアンテナの地表面からの離隔であるので、全体的な位置合わせで十分である。
【0017】
非注水時の受信データと注水時の受信データの相関により両受信データの位置合わせを行う場合、探査対象管路からの反射信号を含む領域では、両受信データに当然差がある。2個のデータの相関度を調べて位置合わせを行うのであるから、比較する2個のデータに位置ずれに起因する以外の差があると位置合わせに影響を及ぼす。そこで、本発明では、探査対象管路による反射信号が存在しない時間領域、例えば、図4の領域1と領域2の何れか一方あるいは両方の遅延時間領域の受信データを用いて上記の比較を行う。比較に用いる遅延時間領域は、探査対象管路からの反射信号が含まれないように余裕を持って設定する。以下、本発明による方法の詳細を説明する。
【0018】
位置合わせは、探査対象管路による反射信号が存在しない時間領域の注水時受信データと非注水時受信データを比較して、類似性が最も高くなる時間方向のずれと距離方向のずれを探すことにより行う。以下、具体的な方法を説明する。
簡単のために、時間領域1を用いる場合について説明する。注水時の受信データと非注水時の受信データのいずれを基準にしても手順は同じであるから、非注水時の受信データを基準にすると仮定する。注水時の受信データの領域1の中に、第4図中の黒丸で示されているような、着目点を適当に設定する。この着目点に相当する受信データをsI(mI, nI)とする。領域1の中に着目位置を含む着目領域(第4図の破線の4角で囲まれている領域)を設定する。同着目領域と最も類似性が高い領域を非注水時受信データの領域1の中で探索する。この非注水時受信データ領域を対応領域と呼ぶことにする。
【0019】
着目点の受信データsI(mI, nI)に対応する非注水時受信データをsN(mN, nN)とし、対応点と呼ぶことにする。注水時の着目点の探査位置pI(nI)には非注水時の探査位置pN(nN)が対応する。対応する注水時と非注水時の探査位置の番号の差nN - nIは一定ではなく着目点ごとに異なる。ただし、対応する探査位置における注水時と非注水時の受信データは時間方向にはデータ全体がずれていると考える。例えば、着目点の探査位置pI(nI)における注水時受信データsI(m, nI)には、対応点の探査位置pN(nN)における非注水時受信データsN(m-mI+mN, nN)が、mに関わらず対応する。もち論、mは番号に対応する受信データが存在するように、

を満たすものとする。
【0020】
次に、最も類似性が高い領域を決定する方法について説明する。対応する探査地点 PI(nI) の近傍で領域1の中にある注水時受信データである着目領域を設定し、同着目領域の受信データを選び出す。これを
【数1】
とする。ここで、ML1、MU1は
であり、いずれも領域1の下限以上で上限以下の番号である。ML1、MU1はそれぞれ、領域1の下限と上限である。
はアンテナ移動距離方向の選択範囲を与える整数である。もし、
を満足するm, nの全てに対して対応する受信データが無い場合は、値が0の受信データを付け加えて
個のデータとする。例えば、注水時受信データの端部(探査位置方向と時間方向の境界付近)で、着目点を境界の近くに選んだ場合などである。
【0021】
これに対応して、非注水時の受信データから比較対象の領域を選択する。注水時と非注水時の探査開始位置をほぼ同じ位置に設定すれば、両者の受信データ受信位置や遅延時間のずれは大きくない。着目領域に対応する非注水時受信データを
【数2】
とする。ここで、
は時間方向の選択範囲を与える整数であり、
はアンテナ移動距離方向の選択範囲を与える整数である。最も類似性が高い対応点を探索する場合に見込まれる時間方向のずれの最大値Δmと探査位置方向のずれの最大値Δnを考慮して、
となるように選ぶことが望ましい。もし、
を満足するm, nの全てに対して対応する受信データが無い場合は、値が0の受信データを付け加えて
個のデータとする。
【0022】
次に、このようにして選び出したデータどうしが最も一致するずれを見つける。このための1つの方法として2次元の相互相関を求める方法について説明する。次の式
【数3】
で与えられる相互相関を最大とするμおよびνを求める。ここで、和をとる範囲は両方のデータが存在する範囲とする。
【0023】
注水時の nI=0, … I-1 なるI個の全ての受信位置について、式(3)を用いて対応する非注水時の受信データのずれμおよびνを求めても良いが、計算時間を要する。そこで、適当な間隔で選び出したK個の nI(0), … nI(K-1) についてμおよびνを求め、その間を補間することもできる。つまり、nI=nI(0), … nI(K-1) に対するμおよびνをそれぞれμ(0), …μ(K-1)、ν(0), …ν(K-1)とするとき、これらの値を使って、任意のnIに対する位置ずれμおよびνを求める。
本質的に計算量は変わらないが、受信データ SI(nI) と SN(nI) をそれぞれ次式のように1次元のデータとして並べ替え、1次元データとしての相関値の最大値によりずれを求めることもできる。
【数4A】
【数4B】
あるいは、類似性が最も高い対応点を求める方法として次式を用いることも可能である。
【数5】
ここで、式(3)と同様に和をとる範囲は両方のデータが存在する範囲とする。
【0024】
次に、実際に注水時の受信データと非注水時の受信データの差分を求める方法について説明する。着目点を1個しか求めない場合、つまり探査位置方向のずれも一様であるとみなす場合は、式(3)あるいは式(5)で求められたμとνを用いて、注水時の受信データと非注水時の受信データの両方が重なる範囲内で、
【数6】
を行えばよい。
【0025】
複数個、例えば0からK−1までのK個(1<K)の着目点を設けた場合、k番目の着目点
で求められた時間方向および探査位置方向のずれをそれぞれμk、νkとする。このときk番目の着目点の探査位置PI(nI,k)(注水時の探査位置)に対して、k番目の対応点探査位置PN(nN,k), nN,k=nI,k+νkが対応する。そこで、注水時の探査位置あるいは非注水時の探査位置の何れか一方が真の探査位置であると仮定して、他方の位置を補間あるいは補外によって求める。このためには隣接する2個の着目点(対応点)間の線形補間と線形補外、あるいは3個以上の着目点の位置を用いて多点補間と多点補外などを行う。隣接する着目点間の探査位置の個数と、これらの着目点に対応する対応点間の探査位置の個数は一般に同じであるとは限らない。どちらを真の位置と考えても処理方法は同様であるので、注水時の探査位置が真の位置であるとみなして、非注水時の探査位置を補間および補外によって求めたとし、注水時の探査位置をPI(0), PI(1), … PI(NI-1)、補間および補外によって得られた非注水時の探査位置をPN'(0), PN'(1), … PN'(NN-1)とする。非注水時の探査位置をPN'(0), PN'(1), … PN'(NN-1)は、一般に注水時の探査位置をPI(0), PI(1), … PI(NI-1)に一致するとは限らない。一致しないことが普通である。
【0026】
ところで、差分は同じ位置で測定した受信データに対して行う必要がある。つまり、同じ探査位置での受信データが無い場合には、何らかの方法で代わるものを用意する必要がある。注水時の探査位置をPI(0), PI(1), … PI(NI-1)あるいは非注水時の補間および補外で求めた探査位置PN'(0), PN'(1), … PN'(NN-1)のいずれを用いて方法は同様であるので注水時の探査位置での受信データで差分を求める場合について説明する。非注水時の探査位置PN'(0), PN'(1), … PN'(NN'-1)は元の探査位置探査位置PN(0), PN(1), … PN(NN-1)とは異なるかもしれないが、非注水時の受信データとの対応関係は元のままである。そこで、非注水時の元の受信データSN=[sN(m, n)]、m=0, … M-1; n=0, … NN-1から注水時の探査位置PI(0), PI(1), … PI(NI-1)における非注水時の受信データSN'=[sN'(m, n)]、m=0, … M-1; n=0, … NI-1を補間および補外によって求める。
【0027】
以上、探査位置方向の処理について説明した。次に時間方向の処理について説明する。k番目着目点における時間方向のずれμkは整数であるが、隣接する着目点のずれとは一般に同じであるとは限らない。そこで、着目点以外の探査位置における時間方向のずれを補間および補外によって求める。探査位置方向と時間方向の両者を同時に処理するように2次元の補間よび補外を行うことも可能であるが、説明を簡単にするために探査位置方向の1次元の補間・補外と時間方向の1次元の補間・補外を個別に行う場合について説明する。
【0028】
既に探査位置方向の補間および補外によって、注水時の探査位置における非注水時の受信データSN'=[sN'(m, n)]、m=0, … M-1; n=0, … NI-1が既に求められている。注水時の探査位置 PN(k)における時間方向のずれをμk', (k=0, 1, … NI-1)とする。μk'は一般に整数とは限らない。どの受信位置における処理も同様であるので、注水時のk番目の探査位置における処理について説明する。また、簡単のために受信データを受信する時刻の間隔を1とする。つまり、注水時の受診データSI=[sI(m, n)]、m=0, … M-1; n=0, … NI-1に関してはデータの番号mがそのまま受診時刻であるような単位系を採用する。すると、受信時刻μk',1+μk', … M-1+μk'における非注水時の受診データsN'(m, k)、m=0, … M-1が測定され、補間により得られていることになる。注水時の受信時刻0, 1, … Mが正しいと考えるから、この時刻における非注水時の受診データsN''(m, k)、m=0, … M-1を補間および補外によって求める。
【0029】
以上に処理により、同じ探査位置と同じ受診時刻における注水時および非注水時の受診データが用意できる。後は単純に探査位置方向の補間・補外および時間方向の補間・補外によって得られた受診データ差分sN''(m, n), m=0, 1, … M-1; n=1, 2, … NI-1と注水時受信データsI(m, n), m=0, 1, … M-1; n=1, 2, … NI-1の差分
【数7】
を求めればよい。
【産業上の利用可能性】
【0030】
探査対象である管路が探査用の送信電波をほとんど反射することがない樹脂製管路の探査であっても、管路に水等、電波を反射する特性を有する液体を注入すると、注入前と注入後ではレーダ波の反射状況が異なり、受信データが異なってくる。本発明に係る埋設管路探査方法では、上記の特性を利用し液体注水時の受信データと非注水時の受信データの差分データを求め、この差分データから樹脂製管路の位置を求める。この方法により、樹脂製等非導電性の管路であっても確実な探査が可能となる。また、差分データを求める際、注入前のデータ測定と注入後のデータ測定との間に発生する測定時刻あるいは距離の測定誤差を補正することにより、より正確な位置の探査が可能となる。
【図面の簡単な説明】
【0031】
【図1】本発明に用いられる測定装置の概要図
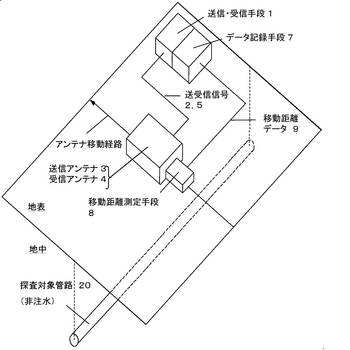
【図2】非注水時の受信データを記録する概要図
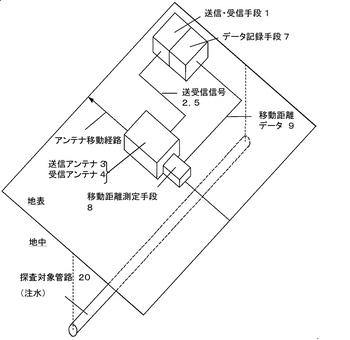
【図3】注水時の受信データを記録する概要図
【図4】非注水時及び注水時の記録データと差分データの概要図
【技術分野】
【0001】
本発明は、いわゆる電磁式の管路探査法に属するものであり、塩化ビニルなど非導電性の地中埋設管路の探査法を提供することを目的とする。特に、光ケーブル用管路など通常の状態で管路内に空隙がある樹脂製の管路を対象とするものである。
【背景技術】
【0002】
非金属埋設管は導電率が低いため、金属管路の探知で一般的に使用される方法、すなわち埋設管路に電流を流し、この電流により埋設管路の周囲に発生する誘導磁界を地表において検出し、これより埋設管路の位置及び深度を測定する方法を採用することができなかった。そこで、非金属埋設管の探知においては、従来は、埋設管路に付設した振動発振器より振動(例えば400Hz)を発生させ、地中を伝播してきた振動音を地表において検出し、これより埋設管路の位置を測定する方法(音波探知方法)、あるいは、地表に設置したレーダー装置のアンテナより地中に向けて電磁波を発射し、埋設管路において反射してきた電磁波を地表において受信機により捕捉し、これより埋設管路の位置及び深度を測定する方法(レーダー探知方法)が採用されてもいた。
【0003】
上記音波探知方法では、埋設管路の深度を測定することができないばかりか、音波が地表に届くまでに減衰するので、深度が2m以上になると探知が困難になるという問題があった。
地中レーダを用いれば管種を問わずに管路からの反射信号を得られるものの、樹脂製の管では反射強度が弱く、良好な探査が可能な管径や埋設深さが限られている。さらに、周囲に礫や地層の乱れ、金属管等がある場合、これらによる反射信号の中から樹脂製の管路からの反射信号を特定することは、樹脂製の管路からの反射信号が弱いために極めて困難である。
【0004】
探査方法の改良として、探知区間の埋設管路内に導電性を有する塩水を注入し、この導電性を有する塩水に電流を流し、電流によって発生する誘導磁界を地表で検出し、埋設管路の位置及び深度を測定する方法が特開平11−160451号公報に開示されている。
【特許文献1】特開平11−160451号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、通信ケーブル用管路などでは、車両が通行する場所、路肩、あるいは中央分離帯など地上の状態に応じて管路の材質が変えられていることが多い。このような場合、両側を金属製の管路に挟まれて樹脂製管路が存在する状況が発生する。このような場合、測定対象である管路に塩水を注入し、電流を流しても金属製の管路部分から地中に電流が漏洩してしまうために、樹脂製の管路部分に探査に十分な電流を流すことはできない状況が発生する。
本発明は、両側を金属製の管路に挟まれている、周囲に礫が多い、金属性管路が存在するなどの状況に左右されない樹脂製管路探査法を提供するものである。
【課題を解決するための手段】
【0006】
本発明の探査方法の概要は以下の通りである。
(1) 地中レーダによる従来の探査と同様に、管路を横断する方向にレーダアンテナを走査しながら地中からの反射信号を受信する方法で探査データを取得する。
(2) 管路に導電性の液体、例えば水を注入して、上記(1)と同じ経路に沿ってアンテナを移動して探査データを取得する。
(3) 注水時と非注水時の探査データの差分を求める。
上記の方法により、対象とする樹脂製管路からの反射信号を強調して取り出すことが可能になる。
【0007】
さらに、
(4) 探査対象管路からの反射信号が存在しない区間の受信データを比較することよって、注水時と非注水時の受信データ取得位置の差を補正しながら、探査データの差分を求める。
【発明の効果】
【0008】
本発明によれば、従来の方法では探査が不可能であった、両側を金属製の管路に挟まれている、周囲に礫が多い、金属性管路が存在するなどの状況においても樹脂製管路を効果的に探査することが可能になる。かつ、作業員の人的な要因や地表の状態に起因するアンテナ移動の不均一による注水時と非注水時の反射信号取得位置の差を補正することにより、測定対象管路からの反射信号を良好に取り出すことができる。
【実施例】
【0009】
第1図は本発明に係る測定系の構成を示す図である。
送信・受信手段1は送信アンテナ3に送信信号2を送る。また、送信信号2の送出を基準時刻として受信アンテナ4から送られてくる受信信号5をデジタルデータに変換し、変換したデータを受信データ6としてデータ記録手段7に送る。移動距離測定手段8は測定開始時等、適当な開始時刻から測定装置が移動した距離を測定するものであり、測定した移動距離を移動距離データ9としてデータ時記録手段7に送る。データ記録手段7は受信データ6を受信した時刻の移動距離と当該受信データを対応させて記録する。
【0010】
第1図に示される構成の測定系を用いて、探査対象である管路が埋設されている地中に向けて、地表から送信信号を発射し、地中からの反射波を受信アンテナにより受信し記録する。探査対象である管路に注水する前と注水した後の二回、同じアンテナ移動経路に沿って受信データを記録する。非注水管路に対する探査と注水管路に対する探査を行う順番は任意である。
探査対象である管路が送信電波をほとんど反射することがない樹脂製であっても、管路に水等、電波を反射する特性を有する液体を注入することにより、注入前と注入後では受信データが異なってくる。従って、注水時の受信データと非注水時の受信データの差分である差分データを求め、この差分データを適当な方法で画像化すれば、測定対象である樹脂製管路からの反射信号を強調した画像が得られる。
【0011】
第2図は測定対象の管路20に水を注入せず、非注水時の受信データを記録する状況を示すものであり、第3図は測定対象の管路20に水を注入し、管を導電状態とした状態で、第2図に示される非注水時と同じアンテナ移動経路に沿って受信データを記録する状況を示すものである。地中に埋設された探査対象の管路20上の地表を一定の速度で探査装置を移動させ、探査装置の送信アンテナからレーダ波を地中に向けて照射する。地中の構造に対応して照射されたレーダ波の反射量が変化する。地中からの反射レーダ波を探査装置の受信アンテナで受信する。移動距離測定手段8は探査装置が地表を移動した距離を測定しデータ記録手段7に送信する。データ記録手段7は送受信手段1から送られてくる受信レーダ波の信号と時刻情報及び移動距離測定手段8からの距離信号を記録する。探査対象の管路20に注水しない状態と管路20に注水した状態で、探査装置を同じ移動経路上を同じ移動速度で移動させ上記の測定を行う。
【0012】
第4図には、探査対象の管路に注水しない状態(非注水時)で受信された反射レーダ波と、管路に注水した状態での反射レーダ波を画像化した例と、両データの差分が示されている。
【0013】
受信データの位置合わせ法
通常の地中レーダでは、等価的なサンプリングレートは10GHzから数10GHzである。サンプリング周期0.05 ns(20 GHz)は、空気中での電磁波の往復距離にして7.5 mmに相当する。したがって、地表面の起伏の差や草の根等の状況によって、対応する非注水時と注水時の受信データで、遅延時間に1サンプリング周期程度のずれが発生する可能性がある。また、フィールドにおける探査では、地表面の状態やアンテナの移動操作の違いなどの原因により、注水時と非注水時の探査における探査開始位置、地表面からのアンテナの高さを含めて探査の経路を全く同じにすることはできず、非注水時と注水時とで測定装置を同じ経路を同じ速度で移動されることは実際上不可能である。
【0014】
したがって、探査対象である管路以外からの反射による受信信号をできる限り除去して、探査対象管路からの非注水時と注水時の受信データの差分を得るためには、送受信データの位置の誤差、遅延時間の誤差を補正して差分を求める必要がある。
【0015】
探査によって得られた非注水時の受信データを SN=[sN(m, n)]、m=0, … M-1; n=0, … NN-1 とし、および注水時の受信データを SI=[sI(m, n)]、m=0, … M-1; n=0, … NI-1 とする。ただし、sN(m, n)、sI(m, n) はそれぞれ、測定位置nの受信遅延時間mにおける非注水時および注水時の受信データである。また、非注水時の受信データに対応する探査位置を PN(n)、注水時の受信データに対応する探査位置を PI(n) とする。ここで、受信遅延時間とは、送信・受信手段の内部的な送信信号発生時刻などを起点として、当該受信データを受信するまでの遅延時間である。
【0016】
既に説明したように、注水時と非注水時でほぼ同じ移動経路に沿ってアンテナを移動したとしても、受信データsN(m, n)と受信データsI(m, n)とは必ずしも対応しない。まず、知ることができるのは探査開始位置からの移動距離だけである。したがって、測定開始位置がずれている可能性がある。さらに、地表面の状況によって移動距離計測手段の計測する移動距離に差が生ずる可能性がある。例えば、車輪の回転数を移動距離に変換するような移動距離計測手段の場合、車輪の滑り具合によって移動距離自体に誤差が生ずる可能性がある。移動距離方向の位置合わせは、全体的な位置合わせだけでなく、局所的に見た位置合わせが必要である。遅延時間方向についても位置合わせが必要である。遅延時間については、時間差が生じる原因はアンテナの地表面からの離隔であるので、全体的な位置合わせで十分である。
【0017】
非注水時の受信データと注水時の受信データの相関により両受信データの位置合わせを行う場合、探査対象管路からの反射信号を含む領域では、両受信データに当然差がある。2個のデータの相関度を調べて位置合わせを行うのであるから、比較する2個のデータに位置ずれに起因する以外の差があると位置合わせに影響を及ぼす。そこで、本発明では、探査対象管路による反射信号が存在しない時間領域、例えば、図4の領域1と領域2の何れか一方あるいは両方の遅延時間領域の受信データを用いて上記の比較を行う。比較に用いる遅延時間領域は、探査対象管路からの反射信号が含まれないように余裕を持って設定する。以下、本発明による方法の詳細を説明する。
【0018】
位置合わせは、探査対象管路による反射信号が存在しない時間領域の注水時受信データと非注水時受信データを比較して、類似性が最も高くなる時間方向のずれと距離方向のずれを探すことにより行う。以下、具体的な方法を説明する。
簡単のために、時間領域1を用いる場合について説明する。注水時の受信データと非注水時の受信データのいずれを基準にしても手順は同じであるから、非注水時の受信データを基準にすると仮定する。注水時の受信データの領域1の中に、第4図中の黒丸で示されているような、着目点を適当に設定する。この着目点に相当する受信データをsI(mI, nI)とする。領域1の中に着目位置を含む着目領域(第4図の破線の4角で囲まれている領域)を設定する。同着目領域と最も類似性が高い領域を非注水時受信データの領域1の中で探索する。この非注水時受信データ領域を対応領域と呼ぶことにする。
【0019】
着目点の受信データsI(mI, nI)に対応する非注水時受信データをsN(mN, nN)とし、対応点と呼ぶことにする。注水時の着目点の探査位置pI(nI)には非注水時の探査位置pN(nN)が対応する。対応する注水時と非注水時の探査位置の番号の差nN - nIは一定ではなく着目点ごとに異なる。ただし、対応する探査位置における注水時と非注水時の受信データは時間方向にはデータ全体がずれていると考える。例えば、着目点の探査位置pI(nI)における注水時受信データsI(m, nI)には、対応点の探査位置pN(nN)における非注水時受信データsN(m-mI+mN, nN)が、mに関わらず対応する。もち論、mは番号に対応する受信データが存在するように、
を満たすものとする。
【0020】
次に、最も類似性が高い領域を決定する方法について説明する。対応する探査地点 PI(nI) の近傍で領域1の中にある注水時受信データである着目領域を設定し、同着目領域の受信データを選び出す。これを
【数1】
とする。ここで、ML1、MU1は
であり、いずれも領域1の下限以上で上限以下の番号である。ML1、MU1はそれぞれ、領域1の下限と上限である。
はアンテナ移動距離方向の選択範囲を与える整数である。もし、
を満足するm, nの全てに対して対応する受信データが無い場合は、値が0の受信データを付け加えて
個のデータとする。例えば、注水時受信データの端部(探査位置方向と時間方向の境界付近)で、着目点を境界の近くに選んだ場合などである。
【0021】
これに対応して、非注水時の受信データから比較対象の領域を選択する。注水時と非注水時の探査開始位置をほぼ同じ位置に設定すれば、両者の受信データ受信位置や遅延時間のずれは大きくない。着目領域に対応する非注水時受信データを
【数2】
とする。ここで、
は時間方向の選択範囲を与える整数であり、
はアンテナ移動距離方向の選択範囲を与える整数である。最も類似性が高い対応点を探索する場合に見込まれる時間方向のずれの最大値Δmと探査位置方向のずれの最大値Δnを考慮して、
となるように選ぶことが望ましい。もし、
を満足するm, nの全てに対して対応する受信データが無い場合は、値が0の受信データを付け加えて
個のデータとする。
【0022】
次に、このようにして選び出したデータどうしが最も一致するずれを見つける。このための1つの方法として2次元の相互相関を求める方法について説明する。次の式
【数3】
で与えられる相互相関を最大とするμおよびνを求める。ここで、和をとる範囲は両方のデータが存在する範囲とする。
【0023】
注水時の nI=0, … I-1 なるI個の全ての受信位置について、式(3)を用いて対応する非注水時の受信データのずれμおよびνを求めても良いが、計算時間を要する。そこで、適当な間隔で選び出したK個の nI(0), … nI(K-1) についてμおよびνを求め、その間を補間することもできる。つまり、nI=nI(0), … nI(K-1) に対するμおよびνをそれぞれμ(0), …μ(K-1)、ν(0), …ν(K-1)とするとき、これらの値を使って、任意のnIに対する位置ずれμおよびνを求める。
本質的に計算量は変わらないが、受信データ SI(nI) と SN(nI) をそれぞれ次式のように1次元のデータとして並べ替え、1次元データとしての相関値の最大値によりずれを求めることもできる。
【数4A】
【数4B】
あるいは、類似性が最も高い対応点を求める方法として次式を用いることも可能である。
【数5】
ここで、式(3)と同様に和をとる範囲は両方のデータが存在する範囲とする。
【0024】
次に、実際に注水時の受信データと非注水時の受信データの差分を求める方法について説明する。着目点を1個しか求めない場合、つまり探査位置方向のずれも一様であるとみなす場合は、式(3)あるいは式(5)で求められたμとνを用いて、注水時の受信データと非注水時の受信データの両方が重なる範囲内で、
【数6】
を行えばよい。
【0025】
複数個、例えば0からK−1までのK個(1<K)の着目点を設けた場合、k番目の着目点
で求められた時間方向および探査位置方向のずれをそれぞれμk、νkとする。このときk番目の着目点の探査位置PI(nI,k)(注水時の探査位置)に対して、k番目の対応点探査位置PN(nN,k), nN,k=nI,k+νkが対応する。そこで、注水時の探査位置あるいは非注水時の探査位置の何れか一方が真の探査位置であると仮定して、他方の位置を補間あるいは補外によって求める。このためには隣接する2個の着目点(対応点)間の線形補間と線形補外、あるいは3個以上の着目点の位置を用いて多点補間と多点補外などを行う。隣接する着目点間の探査位置の個数と、これらの着目点に対応する対応点間の探査位置の個数は一般に同じであるとは限らない。どちらを真の位置と考えても処理方法は同様であるので、注水時の探査位置が真の位置であるとみなして、非注水時の探査位置を補間および補外によって求めたとし、注水時の探査位置をPI(0), PI(1), … PI(NI-1)、補間および補外によって得られた非注水時の探査位置をPN'(0), PN'(1), … PN'(NN-1)とする。非注水時の探査位置をPN'(0), PN'(1), … PN'(NN-1)は、一般に注水時の探査位置をPI(0), PI(1), … PI(NI-1)に一致するとは限らない。一致しないことが普通である。
【0026】
ところで、差分は同じ位置で測定した受信データに対して行う必要がある。つまり、同じ探査位置での受信データが無い場合には、何らかの方法で代わるものを用意する必要がある。注水時の探査位置をPI(0), PI(1), … PI(NI-1)あるいは非注水時の補間および補外で求めた探査位置PN'(0), PN'(1), … PN'(NN-1)のいずれを用いて方法は同様であるので注水時の探査位置での受信データで差分を求める場合について説明する。非注水時の探査位置PN'(0), PN'(1), … PN'(NN'-1)は元の探査位置探査位置PN(0), PN(1), … PN(NN-1)とは異なるかもしれないが、非注水時の受信データとの対応関係は元のままである。そこで、非注水時の元の受信データSN=[sN(m, n)]、m=0, … M-1; n=0, … NN-1から注水時の探査位置PI(0), PI(1), … PI(NI-1)における非注水時の受信データSN'=[sN'(m, n)]、m=0, … M-1; n=0, … NI-1を補間および補外によって求める。
【0027】
以上、探査位置方向の処理について説明した。次に時間方向の処理について説明する。k番目着目点における時間方向のずれμkは整数であるが、隣接する着目点のずれとは一般に同じであるとは限らない。そこで、着目点以外の探査位置における時間方向のずれを補間および補外によって求める。探査位置方向と時間方向の両者を同時に処理するように2次元の補間よび補外を行うことも可能であるが、説明を簡単にするために探査位置方向の1次元の補間・補外と時間方向の1次元の補間・補外を個別に行う場合について説明する。
【0028】
既に探査位置方向の補間および補外によって、注水時の探査位置における非注水時の受信データSN'=[sN'(m, n)]、m=0, … M-1; n=0, … NI-1が既に求められている。注水時の探査位置 PN(k)における時間方向のずれをμk', (k=0, 1, … NI-1)とする。μk'は一般に整数とは限らない。どの受信位置における処理も同様であるので、注水時のk番目の探査位置における処理について説明する。また、簡単のために受信データを受信する時刻の間隔を1とする。つまり、注水時の受診データSI=[sI(m, n)]、m=0, … M-1; n=0, … NI-1に関してはデータの番号mがそのまま受診時刻であるような単位系を採用する。すると、受信時刻μk',1+μk', … M-1+μk'における非注水時の受診データsN'(m, k)、m=0, … M-1が測定され、補間により得られていることになる。注水時の受信時刻0, 1, … Mが正しいと考えるから、この時刻における非注水時の受診データsN''(m, k)、m=0, … M-1を補間および補外によって求める。
【0029】
以上に処理により、同じ探査位置と同じ受診時刻における注水時および非注水時の受診データが用意できる。後は単純に探査位置方向の補間・補外および時間方向の補間・補外によって得られた受診データ差分sN''(m, n), m=0, 1, … M-1; n=1, 2, … NI-1と注水時受信データsI(m, n), m=0, 1, … M-1; n=1, 2, … NI-1の差分
【数7】
を求めればよい。
【産業上の利用可能性】
【0030】
探査対象である管路が探査用の送信電波をほとんど反射することがない樹脂製管路の探査であっても、管路に水等、電波を反射する特性を有する液体を注入すると、注入前と注入後ではレーダ波の反射状況が異なり、受信データが異なってくる。本発明に係る埋設管路探査方法では、上記の特性を利用し液体注水時の受信データと非注水時の受信データの差分データを求め、この差分データから樹脂製管路の位置を求める。この方法により、樹脂製等非導電性の管路であっても確実な探査が可能となる。また、差分データを求める際、注入前のデータ測定と注入後のデータ測定との間に発生する測定時刻あるいは距離の測定誤差を補正することにより、より正確な位置の探査が可能となる。
【図面の簡単な説明】
【0031】
【図1】本発明に用いられる測定装置の概要図
【図2】非注水時の受信データを記録する概要図
【図3】注水時の受信データを記録する概要図
【図4】非注水時及び注水時の記録データと差分データの概要図
【特許請求の範囲】
【請求項1】
送信アンテナ、受信アンテナ、送信・受信手段、移動距離計測手段、受信データ記録手段から構成されたレーダを用いて埋設管路を探査する方法であって、
測定対象である埋設管路内に導電性の液体を注入し、前記埋設管路を横断する方向に送信アンテナと受信アンテナの少なくとも一方を移動させ受信信号と移動距離計測手段によって得た受信位置とを受信データ記録手段によって記録する第1段階と、
前記測定対象である埋設管路内に導電性の液体を注入するとこなく、第1の段階と同等の測定を行い受信データを記録する第2の段階と、
前記第1の段階の記録データと、前記第2の段階の記録データの差分を取る第3の段階と、
前記差分から埋設管路の位置を判定する第4の段階からなる埋設管路探査方法。
【請求項2】
請求項1記載の埋設管路探査方法であって、
第3の段階が、第1の段階の記録データと第2の段階の記録データの探査対象の管路からの反射信号が存在しない時間領域において、第1の段階の受信信号の記録位置と第2の段階の受信信号の記録位置の差を補正して差分を取ることを特徴とする埋設管路探査方法。
【請求項1】
送信アンテナ、受信アンテナ、送信・受信手段、移動距離計測手段、受信データ記録手段から構成されたレーダを用いて埋設管路を探査する方法であって、
測定対象である埋設管路内に導電性の液体を注入し、前記埋設管路を横断する方向に送信アンテナと受信アンテナの少なくとも一方を移動させ受信信号と移動距離計測手段によって得た受信位置とを受信データ記録手段によって記録する第1段階と、
前記測定対象である埋設管路内に導電性の液体を注入するとこなく、第1の段階と同等の測定を行い受信データを記録する第2の段階と、
前記第1の段階の記録データと、前記第2の段階の記録データの差分を取る第3の段階と、
前記差分から埋設管路の位置を判定する第4の段階からなる埋設管路探査方法。
【請求項2】
請求項1記載の埋設管路探査方法であって、
第3の段階が、第1の段階の記録データと第2の段階の記録データの探査対象の管路からの反射信号が存在しない時間領域において、第1の段階の受信信号の記録位置と第2の段階の受信信号の記録位置の差を補正して差分を取ることを特徴とする埋設管路探査方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−250896(P2006−250896A)
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願番号】特願2005−71644(P2005−71644)
【出願日】平成17年3月14日(2005.3.14)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願日】平成17年3月14日(2005.3.14)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]