
管路等の位置計測補正方法

【課題】角度センサを有する慣性計測装置を用いて計測する管路等の位置を解析端末で補正する方法を提供する。
【解決手段】解析端末の処理手順は、管路のある始点から所定の距離に位置する終点の位置を計測した値、及び、終点の位置について予め測量した値から、位置誤差を算出するステップと、終点の位置で計測した角度センサから得られる角度値、及び、終点の管路位置について予め測量した角度値から、角度誤差を算出するステップと、終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて補正係数を算出するステップと、補正係数に基づいて、始点から終点までの管路の位置を補正するステップとを含む。
【解決手段】解析端末の処理手順は、管路のある始点から所定の距離に位置する終点の位置を計測した値、及び、終点の位置について予め測量した値から、位置誤差を算出するステップと、終点の位置で計測した角度センサから得られる角度値、及び、終点の管路位置について予め測量した角度値から、角度誤差を算出するステップと、終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて補正係数を算出するステップと、補正係数に基づいて、始点から終点までの管路の位置を補正するステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、慣性計測装置を用いた管路等の位置を直接計測する位置計測補正方法に関する。
【背景技術】
【0002】
一般に、慣性計測装置を用いた一計測装置として、光ファイバジャイロ計測が知られている(例えば、非特許文献1参照)。光ファイバジャイロの計測原理は、右回りと左回りの光についての合成光の強度変化により位相差を算出して角速度を検出する。連続的に検出される角速度を積分していくことにより、相対的な角度変化を算出することができ、ある管路の始点を基準として走査する慣性計測装置の位置を検出することができる。
【0003】
従来の光ファイバジャイロによる位置計測では、光ファイバジャイロの水平位置の計測値について絶対位置を補正するために、所定の装置(コイル)を搭載した電磁法が用いられている。絶対位置補正のために、管路のある始点から所定の距離離れた終点までの位置を計測し、補正係数を決定して、その補正係数を用いて絶対位置補正を行なう方法が一般的に行なわれている。
【0004】
即ち、慣性計測装置を用いて計測した計測線形の2点(始点・終点)の計測値と、予め測量した2点(始点・終点)の測量値とを用いて、終点における位置誤差Δyを算出し、位置誤差Δyにより、補正係数を決定する手法である。
【0005】
【非特許文献1】NTTアクセスサービスシステム研究所、“光ファイバジャイロ計測原理”、[online]、平成17年11月30日(更新)、 [平成19年4月2日検索]、インターネット、〈http://times.ansl.ntt.co.jp/gijyutu/2002_06/Topic_03/topic03_03.html〉
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、位置誤差Δyにより補正係数を決定する従来の手法では、既知の数値Δyを元に補正係数を決定するため、未知である決定すべき補正係数は、1つしか求めることができないものである。
【0007】
即ち、後述する式(1)で表される従来の補正方法(第1補正方法と称する)では、既知の位置誤差Δyと終点位置xから、未知の補正係数aが算出されるのみであり、この補正係数aは、「初期の方向角計測誤差」を意味するものである。初期の方向角計測誤差とは、管路等の始点の位置における真の方向角に対する誤差を云う。
【0008】
【数1】

【0009】
また、後述する式(2)で表される従来の補正方法(第2補正方法と称する)では、既知の位置誤差Δyと終点位置xから、未知の補正係数bが算出されるのみであり、この補正係数bは、「ジャイロのドリフト誤差」を意味するものである。ジャイロのドリフト誤差とは、管路等を走査する際の累積誤差を云う。
【0010】
【数2】
【0011】
これらの補正式を用いた補正方法では、現実的な計測の誤差は初期の方向角計測誤差とジャイロ計測誤差が混在しているため、正しく補正できない場合がある。即ち、式(1)を用いる第1補正方法では、「ジャイロのドリフト誤差」が増加する(計測時間が増加する)と精度が低くなり、式(2)を用いる第2補正方法では「初期の方向角計測誤差」が増加すると精度が低くなるという問題点がある。
【0012】
つまり、慣性計測装置を搭載した計測装置において、いずれか1つの補正方法では様々な管路等の計測条件では安定した精度を維持できることは困難である。また、式(1)及び式(2)の補正方法を併用しても、補正係数a及びbの間で、いわゆる多重共線性を有する場合には、高精度な補正が期待できない。
【0013】
従って、本発明の目的は、様々な管路等の計測条件でも安定した精度が得られる、新たな管路等の位置計測補正方法を提供することにある。
【課題を解決するための手段】
【0014】
本発明による位置計測の補正方法は、角度センサを有する慣性計測装置を走査して計測した管路等の位置を解析端末により補正する方法であって、前記解析端末の処理手順が、前記管路等のある始点から所定の距離に位置する終点の位置を計測した値、及び、前記終点の位置について予め測量した値から、位置誤差を算出するステップと、前記終点の位置で計測した前記角度センサから得られる角度値、及び、前記終点の管路位置について予め測量した角度値から、角度誤差を算出するステップと、前記終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて前記所定の距離の始点及び終点の位置を補正する補正係数を算出するステップと、前記補正係数に基づいて始点から終点までの管路の位置を補正するステップとを含み、前記連立方程式は、始点から所定の距離に位置する終点の位置をx、位置誤差をΔy、角度誤差をΔθ、補正係数をc及びdとしたとき、
Δθ=c・x+d
Δy=1/2・c・x2+d・x
で表されることを特徴とする。
【発明の効果】
【0015】
本発明の補正方法によれば、終点における既知の角度誤差Δθ及び位置誤差Δyから、未知の「初期の方向角計測誤差」のための補正係数d、及び未知の「ジャイロのドリフト誤差」のための補正係数cの双方について、計測条件毎に決定することで、補正後の位置誤差の精度を安定に保つことができ、様々な計測条件に適合させることができるようになる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施例について詳細に説明する。
【0017】
図1に、本発明による管路等位置計測の補正方法に用いる管路等計測システムの一例を示す。本実施例の管路等計測システムは、例えば地中6に埋設されている管路5内を走査させて管路位置計測を行なうことを可能とするものである。本実施例の管路等計測システムは、計測プローブ1、距離計4、電源複合通信用ケーブル11、解析端末2及び駆動装置3から構成される。
【0018】
計測プローブ1は、慣性計測装置14と慣性計測装置14からの信号を解析端末2に送信するためのインターフェース(I/F)部10とを有している。また、慣性計測装置14は、角度センサとして機能するための3軸光ファイバジャイロ7及び3軸加速度計8、及び3軸光ファイバジャイロ7及び3軸加速度計8の動作及び出力を制御する中央演算処理装置9(CPU)を備え、更に、処理に必要な記憶部又は信号処理部を有するものである(図示せず)。
【0019】
解析端末2は、一般的なコンピュータで好適に構成でき、操作盤として機能させるために、キーボード又はマウス、計測プローブ1からの角度センサの出力信号を取得し、又は計測プローブ1に対して電源供給することを可能とするインターフェース部、表示装置及び記憶装置などを備えることができる(図示せず)。また、解析端末2は、通信ケーブル12を経て距離計4からの計測した距離データを取得するとともに、電源複合通信用ケーブル11を経て計測プローブ1で計測した角度センサの角度データを取得し、管路位置を特定するための演算を行なうことができる。また、解析端末2は、計測した管路位置に対応する予め測量した線形データ(角度データと距離データ)を図示しない記憶部に記憶しておくことができる。更に、解析端末2によって、駆動装置3を制御することも可能である。即ち、本実施例の管路等計測システムは、従来と同様に、光ファイバジャイロの計測原理を利用して、ある管路の始点を基準として走査する慣性計測装置の位置を検出することができる。
【0020】
本実施例の管路等計測システムの動作方法として、まず慣性計測装置14を計測プローブ1に設置し、牽引ケーブル13で接続された計測プローブ1を管路5内で駆動装置3により牽引する。これにより、計測プローブ1は、管路5内を走査することができる。更に、解析端末2は、慣性計測装置14から算出された角度データと距離計4からの距離データを、電源複合通信用ケーブル11を経て取得することにより、計測した線形データを得ることができる。この計測した線形データと予め測量した線形データ(角度データと距離データ)から位置誤差Δy及び角度誤差Δθを算出し、管路位置の始点・終点を合わせる補正を行なう。
【0021】
本実施例の管路等計測システムの構成は、本発明に係る管路位置の始点・終点を合わせる補正を行なう処理内容を除き、従来と同様の構成で実現できる。
【0022】
次に、本発明に係る管路位置の始点・終点を合わせる補正方法について説明する。
【0023】
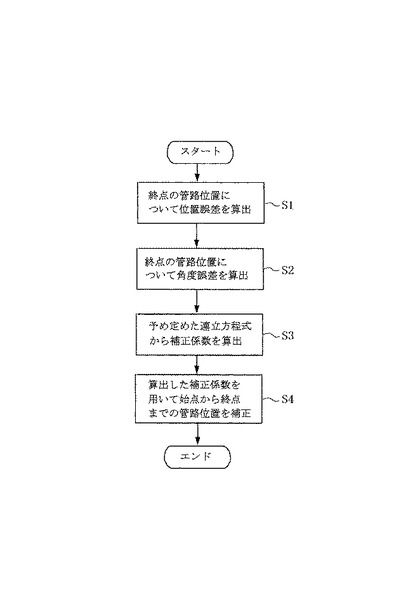
図2に、本発明による一実施例の補正方法として、解析端末の処理手順を示すフローチャートを示す。
【0024】
ステップS1で、慣性計測装置14により管路5を走査して、管路5のある始点から所定の距離に位置する終点の位置を計測した値、及び、その終点の位置について予め測量した値から、位置誤差を算出する。
【0025】
ステップS2で、終点の位置で計測した前記角度センサから得られる角度値、及び、終点の管路位置について予め測量した角度値から、角度誤差を算出する。
【0026】
ステップS3で、終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて所定の距離の始点及び終点の位置を補正する補正係数を算出する。
【0027】
ステップS4で、補正係数に基づいて、始点から終点までの管路の位置を補正する。
【0028】
ここで、本発明に係る始点・終点を合わせる補正方法(以下、第3補正方法と称する)において、始点から所定の距離に位置する終点の位置をx、位置誤差をΔy、角度誤差をΔθ、補正係数をc及びdとしたとき、式(3)及び式(4)で表される連立方程式を用いる。
【0029】
【数3】
【0030】
【数4】
【0031】
次に、式(3)及び式(4)を用いた第3補正方法が、式(1)を用いる従来の第1補正方法又は式(2)を用いる従来の第2補正方法に比べ、優れた効果を有することについて説明する。即ち、第3補正方法であれば、角度誤差Δθを算出する際に、補正係数間の多重共線性の一因である一定の角度誤差γを相殺することができることについて説明する。
【0032】
一定の角度誤差γとは、例えば以下の3つの場合である。
1)角度を計測する角度センサ自体が実際の角度に対し、設定誤差を有している場合。例えば、角度センサの出力角度としてゼロを示す値が真にゼロでない場合である。
2)角度センサとそれを収容する容器との設置誤差(即ち、計測プローブ1内の設置誤差)がある場合。例えば、水平に置かれた計測プローブ内で、角度センサが傾いているような場合である。
3)磁方位を計測した値と真北(正確な値)との差(即ち、偏角)がある場合。例えば、地域ごとに、地磁気から計測した値と真北とのずれが生じる場合があり、一般的に九州と北海道では、その偏角の値が異なる。
【0033】
ここでは、一定の角度誤差γは、予め測量したセンサ角度の真値β(任意の管路位置nについての真値をβnと表す)と、角度センサで計測したセンサ角度の計測値α(任意の管路位置nについての真値をαnと表す)との間で式(5)のように表すことができるものと定義する。尚、このように定義される一定の角度誤差γを除去することが、正確な計測データをもたらすことは以下の説明で明らかになる。
【0034】
【数5】
【0035】
管路位置のある始点(以下、単に始点とも称する)における真のセンサ角度β0は、計測値のセンサ角度α0に対して一定の角度誤差γを有すると仮定すると、式(6)のように表すことができる。
【0036】
【数6】
【0037】
始点における計測値のセンサ角度θ0は、初期の方向角計測誤差を含むとすると、式(7)で表すことができる。
【0038】
【数7】
管路位置の終点(以下、単に終点とも称する)における真のセンサ角度β1は、計測値のセンサ角度α1に対して一定の角度誤差γを有し、式(8)で表すことができる。
【0039】
【数8】
終点における計測値のセンサ角度θ1は、角速度ω及び始点からの計測時間tにより、式(9)で表すことができる。
【0040】
【数9】
【0041】
終点における角度誤差Δθは、式(10)で表すことができる。
【0042】
【数10】
【0043】
式(10)で明らかなように、一定の角度誤差γの初期の方向角計測誤差が発生する場合においても、一定の角度誤差γの影響を除去できるため、一定の角度誤差γの影響を除去できない第2補正方法よりも、第3補正方法のほうが精度は高くなることが分かる。
【0044】
次に、本発明に係る第3補正方法を用いて検証実験した結果について説明する。
【0045】
本検証を行なうにあたり、3軸光ファイバジャイロ7と3軸加速度計8を搭載した慣性計測装置14を計測プローブ1に設置し、計測プローブ1を管路5内で駆動装置3により牽引した(図1参照)。解析端末2により、慣性計測装置14から算出された角度データと距離計4からの距離データを通信用ケーブル12及び電源複合通信用ケーブル11によりデータを取得し、計測した線形データを得た。これと実際の測量した線形データから位置誤差Δy及び角度誤差Δθを算出し、始点・終点を合わせる補正を施した。ここで、実際の線形データ(即ち、予め測量した線形データ)についての測量方法は、真値と定めてよいと判断される任意の方法を用いればよい。
【0046】
以下、補正後の最大位置誤差を従来の第1補正方法及び第2補正方法と、本発明に係る補正方法(第3補正方法)とを比較する検証を行った結果について説明する。
【0047】
ここで、図3に示すように、管路線形は、平面方向に交角約22度・曲率半径10Rの曲線を2箇所設け、縦断方向は曲線がないものとし、管路長は約48mとした。また、牽引速度は、3cm/s、5cm/s及び20cm/sとした。
【0048】
検証方法として、管路長と牽引速度から算出できる計測時間と補正後の最大位置誤差との間の特性値、即ち、各補正後の最大位置誤差の平均値μをy軸とし、計測時間をx軸としたグラフで表すことにより、第1補正方法及び第2補正方法と第3補正方法との比較を行った。
【0049】
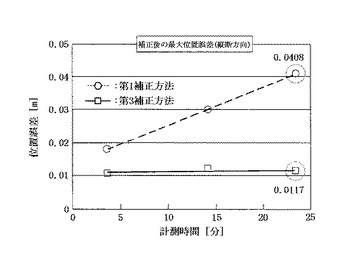
まず、図4に、平面方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図を示す。また、図5に、縦断方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図を示す。
【0050】
図4及び図5から、第1補正方法は、平面方向及び縦断方向ともに時間の増加に伴い、最大位置誤差が増加していく傾向となったことが分かる。また、図4及び図5から、第3補正方法は、計測時間の経過によらず最大位置誤差の平均値μはほぼ一定となったことが分かる。
【0051】
図4及び図5において補正方法別の最大位置誤差で比較すると、平面方向の最大位置誤差について(図4)、第1補正方法では0.0309となり、第3補正方法では0.0155となった。また、縦断方向の最大位置誤差について(図5)、第1補正方法では0.0408となり、第3補正方法では0.0117となった。このように、平面方向・縦断方向ともに、第3補正方法のほうが補正後の精度が高い結果となった。
【0052】
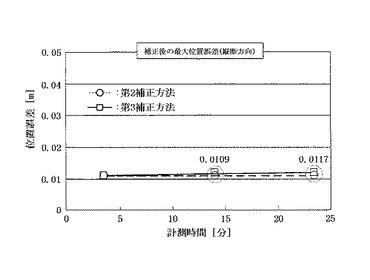
次に、図6に、平面方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図を示す。また、図7に、縦断方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図を示す。
【0053】
図6及び図7から、第2補正方法及び第3補正方法は、平面方向及び縦断方向ともに計測時間によらず最大位置誤差はほぼ一定となった。
【0054】
即ち、図6及び図7において補正方法別の最大位置誤差で比較すると、平面方向の最大位置誤差について(図6)、第2補正方法では0.0142となり、第3補正方法では0.0155となった。また、縦断方向の最大位置誤差について(図7)、第2補正方法では0.0109となり、第3補正方法では0.0117となった。このように、平面方向・縦断方向ともに、第2補正方法及び第3補正方法の補正後の精度は同等となった。
【0055】
総括すると、図4〜7に示す今回の検証における補正後の精度比較として、第1補正方法より第3補正方法は精度が高く、第2補正方法と第3補正方法は同等という結果となった。
【0056】
しかしながら、第2補正方法では、初期の方向角計測誤差を考慮したものではない。よって、今回の検証実験では、初期の方向角計測誤差が極めてゼロに近い条件であったことが上記の結果からも云える。
【0057】
そこで、初期の方向角計測誤差がある程度発生した場合について、シミュレーションにより検証を行なった。
【0058】
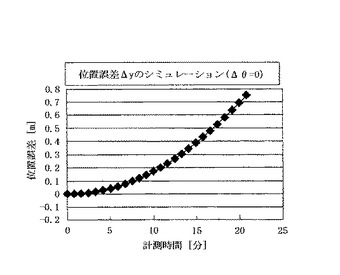
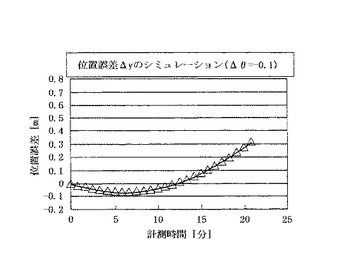
ここで、初期の方向角計測誤差が発生していない場合(Δθ=0)と、ある一定の角度誤差γにより初期の方向角計測誤差が発生している場合(Δθ=−0.1)を特定条件として設定し、それぞれの位置誤差Δyについてシミュレーションした結果をそれぞれ図8及び図9に示す。
【0059】
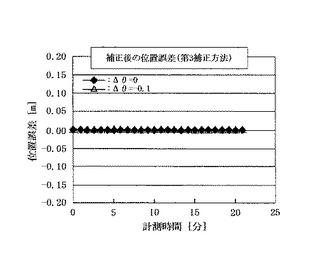
また、図8及び図9に示す位置誤差Δyについて、第2補正方法及び第3補正方法により補正した結果をそれぞれ図10及び図11に示す。
【0060】
図10及び図11に示すシミュレーションにおける結果から、一定の角度誤差γは第2補正方法では誤差成分として影響を与えるが、第3補正方法では誤差成分として影響を与えないことが分かる。
【0061】
以上述べたとおり、「初期の方向角計測誤差」を予め抑えることができる場合は、第2補正方法及び第3補正方法も同等の補正精度が得られるが、ある特定条件の下(例えば、無視できない一定の角度誤差γが生じる場合)では、第3補正方法が最も精度が高くなることが云える。
【0062】
尚、上述したように、実施例の補正方法を実現するための解析端末は、コンピュータによって好適に実現することができる。その場合、解析端末による補正方法の各ステップ(図2参照)を実行するための処理内容は、プログラムによって記述される。従って、そのような解析端末として機能するコンピュータに、図2に示す各ステップを実行させるためのプログラムは、コンピュータに接続されるハードディスクなどの記憶装置又はコンピュータ内部に設けられるROM或いはRAMなどの記憶装置に適宜格納することができる。即ち、そのようなプログラムを解析端末として機能するコンピュータが備える中央演算処理装置(CPU)によって実行することにより、本発明の補正方法はコンピュータ上で実現される。この場合に、本補正方法の各処理は、ハードウェアの一部で実現しても良い。
【0063】
更に、この処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体に記録することができる。コンピュータで読み取り可能な記録媒体としては、例えば、磁気記録装置、光ディスク、光磁気記録装置、半導体メモリ等どのようなものでもよい。
【0064】
また、この処理内容を記述したプログラムを、例えばDVD又はCD−ROMなどの可搬型記録媒体の販売、譲渡、貸与等により流通させることができるほか、そのようなプログラムを、ネットワーク上のサーバコンピュータの記録装置に格納しておき、ネットワークを介してサーバコンピュータから他のコンピュータにそのプログラムを転送することにより、流通させることができる。
【0065】
上述の実施例については代表的な例として説明したが、本発明の趣旨及び範囲内で、多くの変更及び置換することができることは当業者に明らかである。例えば、「管路」の意味を建造物又は地中などの埋設管に限定する必要は無く、本発明によればボーリング等による削孔に対しても適用可能である。従って、本発明は、上述の実施例によって制限するものと解するべきではなく、特許請求の範囲によってのみ制限される。
【産業上の利用可能性】
【0066】
本発明によれば、従来の補正方法に加わる新しい補正方法の一つを提供することができる。例えば、慣性計測装置内のジャイロドリフト精度や傾斜角センサ精度、又は方位センサ精度等の条件により、精度を高めるためにどの補正方法を利用するかの選択肢を増やすことができ、管路等の位置計測技術の全体的な精度向上を推進する用途に有用である。
【図面の簡単な説明】
【0067】
【図1】本発明による管路等位置計測の補正方法に用いる管路等計測システムの一例を示す図である。
【図2】本発明による一実施例の補正方法として、解析端末の処理手順を示すフローチャートを示す図である。
【図3】本発明による一実施例の補正方法を検証する際に用いた管路線形を示す図である。
【図4】平面方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図である。
【図5】縦断方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図である。
【図6】平面方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図である。
【図7】縦断方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図である。
【図8】初期方向角計測誤差が発生していない場合(Δθ=0)を特定条件として設定した場合における、第2補正方法と第3補正方法の位置誤差Δyについてシミュレーションした結果を示す図である。
【図9】初期方向角計測誤差が発生している場合(Δθ=−0.1)を特定条件として設定した場合における、第2補正方法と第3補正方法の位置誤差Δyについてシミュレーションした結果を示す図である。
【図10】図8に示す位置誤差Δyについて、第2補正方法及び第3補正方法により補正した結果を示す図である。
【図11】図9に示す位置誤差Δyについて、第2補正方法及び第3補正方法により補正した結果を示す図である。
【符号の説明】
【0068】
1 計測プローブ
2 解析端末
3 駆動装置
4 距離計
5 管路
6 地中
7 3軸光ファイバジャイロ
8 3軸加速度計
9 中央演算処理装置(CPU)
10 インターフェース(I/F)部
11 電源複合通信用ケーブル
12 通信ケーブル
13 牽引ケーブル
14 慣性計測装置
【技術分野】
【0001】
本発明は、慣性計測装置を用いた管路等の位置を直接計測する位置計測補正方法に関する。
【背景技術】
【0002】
一般に、慣性計測装置を用いた一計測装置として、光ファイバジャイロ計測が知られている(例えば、非特許文献1参照)。光ファイバジャイロの計測原理は、右回りと左回りの光についての合成光の強度変化により位相差を算出して角速度を検出する。連続的に検出される角速度を積分していくことにより、相対的な角度変化を算出することができ、ある管路の始点を基準として走査する慣性計測装置の位置を検出することができる。
【0003】
従来の光ファイバジャイロによる位置計測では、光ファイバジャイロの水平位置の計測値について絶対位置を補正するために、所定の装置(コイル)を搭載した電磁法が用いられている。絶対位置補正のために、管路のある始点から所定の距離離れた終点までの位置を計測し、補正係数を決定して、その補正係数を用いて絶対位置補正を行なう方法が一般的に行なわれている。
【0004】
即ち、慣性計測装置を用いて計測した計測線形の2点(始点・終点)の計測値と、予め測量した2点(始点・終点)の測量値とを用いて、終点における位置誤差Δyを算出し、位置誤差Δyにより、補正係数を決定する手法である。
【0005】
【非特許文献1】NTTアクセスサービスシステム研究所、“光ファイバジャイロ計測原理”、[online]、平成17年11月30日(更新)、 [平成19年4月2日検索]、インターネット、〈http://times.ansl.ntt.co.jp/gijyutu/2002_06/Topic_03/topic03_03.html〉
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、位置誤差Δyにより補正係数を決定する従来の手法では、既知の数値Δyを元に補正係数を決定するため、未知である決定すべき補正係数は、1つしか求めることができないものである。
【0007】
即ち、後述する式(1)で表される従来の補正方法(第1補正方法と称する)では、既知の位置誤差Δyと終点位置xから、未知の補正係数aが算出されるのみであり、この補正係数aは、「初期の方向角計測誤差」を意味するものである。初期の方向角計測誤差とは、管路等の始点の位置における真の方向角に対する誤差を云う。
【0008】
【数1】
【0009】
また、後述する式(2)で表される従来の補正方法(第2補正方法と称する)では、既知の位置誤差Δyと終点位置xから、未知の補正係数bが算出されるのみであり、この補正係数bは、「ジャイロのドリフト誤差」を意味するものである。ジャイロのドリフト誤差とは、管路等を走査する際の累積誤差を云う。
【0010】
【数2】
【0011】
これらの補正式を用いた補正方法では、現実的な計測の誤差は初期の方向角計測誤差とジャイロ計測誤差が混在しているため、正しく補正できない場合がある。即ち、式(1)を用いる第1補正方法では、「ジャイロのドリフト誤差」が増加する(計測時間が増加する)と精度が低くなり、式(2)を用いる第2補正方法では「初期の方向角計測誤差」が増加すると精度が低くなるという問題点がある。
【0012】
つまり、慣性計測装置を搭載した計測装置において、いずれか1つの補正方法では様々な管路等の計測条件では安定した精度を維持できることは困難である。また、式(1)及び式(2)の補正方法を併用しても、補正係数a及びbの間で、いわゆる多重共線性を有する場合には、高精度な補正が期待できない。
【0013】
従って、本発明の目的は、様々な管路等の計測条件でも安定した精度が得られる、新たな管路等の位置計測補正方法を提供することにある。
【課題を解決するための手段】
【0014】
本発明による位置計測の補正方法は、角度センサを有する慣性計測装置を走査して計測した管路等の位置を解析端末により補正する方法であって、前記解析端末の処理手順が、前記管路等のある始点から所定の距離に位置する終点の位置を計測した値、及び、前記終点の位置について予め測量した値から、位置誤差を算出するステップと、前記終点の位置で計測した前記角度センサから得られる角度値、及び、前記終点の管路位置について予め測量した角度値から、角度誤差を算出するステップと、前記終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて前記所定の距離の始点及び終点の位置を補正する補正係数を算出するステップと、前記補正係数に基づいて始点から終点までの管路の位置を補正するステップとを含み、前記連立方程式は、始点から所定の距離に位置する終点の位置をx、位置誤差をΔy、角度誤差をΔθ、補正係数をc及びdとしたとき、
Δθ=c・x+d
Δy=1/2・c・x2+d・x
で表されることを特徴とする。
【発明の効果】
【0015】
本発明の補正方法によれば、終点における既知の角度誤差Δθ及び位置誤差Δyから、未知の「初期の方向角計測誤差」のための補正係数d、及び未知の「ジャイロのドリフト誤差」のための補正係数cの双方について、計測条件毎に決定することで、補正後の位置誤差の精度を安定に保つことができ、様々な計測条件に適合させることができるようになる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施例について詳細に説明する。
【0017】
図1に、本発明による管路等位置計測の補正方法に用いる管路等計測システムの一例を示す。本実施例の管路等計測システムは、例えば地中6に埋設されている管路5内を走査させて管路位置計測を行なうことを可能とするものである。本実施例の管路等計測システムは、計測プローブ1、距離計4、電源複合通信用ケーブル11、解析端末2及び駆動装置3から構成される。
【0018】
計測プローブ1は、慣性計測装置14と慣性計測装置14からの信号を解析端末2に送信するためのインターフェース(I/F)部10とを有している。また、慣性計測装置14は、角度センサとして機能するための3軸光ファイバジャイロ7及び3軸加速度計8、及び3軸光ファイバジャイロ7及び3軸加速度計8の動作及び出力を制御する中央演算処理装置9(CPU)を備え、更に、処理に必要な記憶部又は信号処理部を有するものである(図示せず)。
【0019】
解析端末2は、一般的なコンピュータで好適に構成でき、操作盤として機能させるために、キーボード又はマウス、計測プローブ1からの角度センサの出力信号を取得し、又は計測プローブ1に対して電源供給することを可能とするインターフェース部、表示装置及び記憶装置などを備えることができる(図示せず)。また、解析端末2は、通信ケーブル12を経て距離計4からの計測した距離データを取得するとともに、電源複合通信用ケーブル11を経て計測プローブ1で計測した角度センサの角度データを取得し、管路位置を特定するための演算を行なうことができる。また、解析端末2は、計測した管路位置に対応する予め測量した線形データ(角度データと距離データ)を図示しない記憶部に記憶しておくことができる。更に、解析端末2によって、駆動装置3を制御することも可能である。即ち、本実施例の管路等計測システムは、従来と同様に、光ファイバジャイロの計測原理を利用して、ある管路の始点を基準として走査する慣性計測装置の位置を検出することができる。
【0020】
本実施例の管路等計測システムの動作方法として、まず慣性計測装置14を計測プローブ1に設置し、牽引ケーブル13で接続された計測プローブ1を管路5内で駆動装置3により牽引する。これにより、計測プローブ1は、管路5内を走査することができる。更に、解析端末2は、慣性計測装置14から算出された角度データと距離計4からの距離データを、電源複合通信用ケーブル11を経て取得することにより、計測した線形データを得ることができる。この計測した線形データと予め測量した線形データ(角度データと距離データ)から位置誤差Δy及び角度誤差Δθを算出し、管路位置の始点・終点を合わせる補正を行なう。
【0021】
本実施例の管路等計測システムの構成は、本発明に係る管路位置の始点・終点を合わせる補正を行なう処理内容を除き、従来と同様の構成で実現できる。
【0022】
次に、本発明に係る管路位置の始点・終点を合わせる補正方法について説明する。
【0023】
図2に、本発明による一実施例の補正方法として、解析端末の処理手順を示すフローチャートを示す。
【0024】
ステップS1で、慣性計測装置14により管路5を走査して、管路5のある始点から所定の距離に位置する終点の位置を計測した値、及び、その終点の位置について予め測量した値から、位置誤差を算出する。
【0025】
ステップS2で、終点の位置で計測した前記角度センサから得られる角度値、及び、終点の管路位置について予め測量した角度値から、角度誤差を算出する。
【0026】
ステップS3で、終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて所定の距離の始点及び終点の位置を補正する補正係数を算出する。
【0027】
ステップS4で、補正係数に基づいて、始点から終点までの管路の位置を補正する。
【0028】
ここで、本発明に係る始点・終点を合わせる補正方法(以下、第3補正方法と称する)において、始点から所定の距離に位置する終点の位置をx、位置誤差をΔy、角度誤差をΔθ、補正係数をc及びdとしたとき、式(3)及び式(4)で表される連立方程式を用いる。
【0029】
【数3】
【0030】
【数4】
【0031】
次に、式(3)及び式(4)を用いた第3補正方法が、式(1)を用いる従来の第1補正方法又は式(2)を用いる従来の第2補正方法に比べ、優れた効果を有することについて説明する。即ち、第3補正方法であれば、角度誤差Δθを算出する際に、補正係数間の多重共線性の一因である一定の角度誤差γを相殺することができることについて説明する。
【0032】
一定の角度誤差γとは、例えば以下の3つの場合である。
1)角度を計測する角度センサ自体が実際の角度に対し、設定誤差を有している場合。例えば、角度センサの出力角度としてゼロを示す値が真にゼロでない場合である。
2)角度センサとそれを収容する容器との設置誤差(即ち、計測プローブ1内の設置誤差)がある場合。例えば、水平に置かれた計測プローブ内で、角度センサが傾いているような場合である。
3)磁方位を計測した値と真北(正確な値)との差(即ち、偏角)がある場合。例えば、地域ごとに、地磁気から計測した値と真北とのずれが生じる場合があり、一般的に九州と北海道では、その偏角の値が異なる。
【0033】
ここでは、一定の角度誤差γは、予め測量したセンサ角度の真値β(任意の管路位置nについての真値をβnと表す)と、角度センサで計測したセンサ角度の計測値α(任意の管路位置nについての真値をαnと表す)との間で式(5)のように表すことができるものと定義する。尚、このように定義される一定の角度誤差γを除去することが、正確な計測データをもたらすことは以下の説明で明らかになる。
【0034】
【数5】
【0035】
管路位置のある始点(以下、単に始点とも称する)における真のセンサ角度β0は、計測値のセンサ角度α0に対して一定の角度誤差γを有すると仮定すると、式(6)のように表すことができる。
【0036】
【数6】
【0037】
始点における計測値のセンサ角度θ0は、初期の方向角計測誤差を含むとすると、式(7)で表すことができる。
【0038】
【数7】
管路位置の終点(以下、単に終点とも称する)における真のセンサ角度β1は、計測値のセンサ角度α1に対して一定の角度誤差γを有し、式(8)で表すことができる。
【0039】
【数8】
終点における計測値のセンサ角度θ1は、角速度ω及び始点からの計測時間tにより、式(9)で表すことができる。
【0040】
【数9】
【0041】
終点における角度誤差Δθは、式(10)で表すことができる。
【0042】
【数10】
【0043】
式(10)で明らかなように、一定の角度誤差γの初期の方向角計測誤差が発生する場合においても、一定の角度誤差γの影響を除去できるため、一定の角度誤差γの影響を除去できない第2補正方法よりも、第3補正方法のほうが精度は高くなることが分かる。
【0044】
次に、本発明に係る第3補正方法を用いて検証実験した結果について説明する。
【0045】
本検証を行なうにあたり、3軸光ファイバジャイロ7と3軸加速度計8を搭載した慣性計測装置14を計測プローブ1に設置し、計測プローブ1を管路5内で駆動装置3により牽引した(図1参照)。解析端末2により、慣性計測装置14から算出された角度データと距離計4からの距離データを通信用ケーブル12及び電源複合通信用ケーブル11によりデータを取得し、計測した線形データを得た。これと実際の測量した線形データから位置誤差Δy及び角度誤差Δθを算出し、始点・終点を合わせる補正を施した。ここで、実際の線形データ(即ち、予め測量した線形データ)についての測量方法は、真値と定めてよいと判断される任意の方法を用いればよい。
【0046】
以下、補正後の最大位置誤差を従来の第1補正方法及び第2補正方法と、本発明に係る補正方法(第3補正方法)とを比較する検証を行った結果について説明する。
【0047】
ここで、図3に示すように、管路線形は、平面方向に交角約22度・曲率半径10Rの曲線を2箇所設け、縦断方向は曲線がないものとし、管路長は約48mとした。また、牽引速度は、3cm/s、5cm/s及び20cm/sとした。
【0048】
検証方法として、管路長と牽引速度から算出できる計測時間と補正後の最大位置誤差との間の特性値、即ち、各補正後の最大位置誤差の平均値μをy軸とし、計測時間をx軸としたグラフで表すことにより、第1補正方法及び第2補正方法と第3補正方法との比較を行った。
【0049】
まず、図4に、平面方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図を示す。また、図5に、縦断方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図を示す。
【0050】
図4及び図5から、第1補正方法は、平面方向及び縦断方向ともに時間の増加に伴い、最大位置誤差が増加していく傾向となったことが分かる。また、図4及び図5から、第3補正方法は、計測時間の経過によらず最大位置誤差の平均値μはほぼ一定となったことが分かる。
【0051】
図4及び図5において補正方法別の最大位置誤差で比較すると、平面方向の最大位置誤差について(図4)、第1補正方法では0.0309となり、第3補正方法では0.0155となった。また、縦断方向の最大位置誤差について(図5)、第1補正方法では0.0408となり、第3補正方法では0.0117となった。このように、平面方向・縦断方向ともに、第3補正方法のほうが補正後の精度が高い結果となった。
【0052】
次に、図6に、平面方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図を示す。また、図7に、縦断方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図を示す。
【0053】
図6及び図7から、第2補正方法及び第3補正方法は、平面方向及び縦断方向ともに計測時間によらず最大位置誤差はほぼ一定となった。
【0054】
即ち、図6及び図7において補正方法別の最大位置誤差で比較すると、平面方向の最大位置誤差について(図6)、第2補正方法では0.0142となり、第3補正方法では0.0155となった。また、縦断方向の最大位置誤差について(図7)、第2補正方法では0.0109となり、第3補正方法では0.0117となった。このように、平面方向・縦断方向ともに、第2補正方法及び第3補正方法の補正後の精度は同等となった。
【0055】
総括すると、図4〜7に示す今回の検証における補正後の精度比較として、第1補正方法より第3補正方法は精度が高く、第2補正方法と第3補正方法は同等という結果となった。
【0056】
しかしながら、第2補正方法では、初期の方向角計測誤差を考慮したものではない。よって、今回の検証実験では、初期の方向角計測誤差が極めてゼロに近い条件であったことが上記の結果からも云える。
【0057】
そこで、初期の方向角計測誤差がある程度発生した場合について、シミュレーションにより検証を行なった。
【0058】
ここで、初期の方向角計測誤差が発生していない場合(Δθ=0)と、ある一定の角度誤差γにより初期の方向角計測誤差が発生している場合(Δθ=−0.1)を特定条件として設定し、それぞれの位置誤差Δyについてシミュレーションした結果をそれぞれ図8及び図9に示す。
【0059】
また、図8及び図9に示す位置誤差Δyについて、第2補正方法及び第3補正方法により補正した結果をそれぞれ図10及び図11に示す。
【0060】
図10及び図11に示すシミュレーションにおける結果から、一定の角度誤差γは第2補正方法では誤差成分として影響を与えるが、第3補正方法では誤差成分として影響を与えないことが分かる。
【0061】
以上述べたとおり、「初期の方向角計測誤差」を予め抑えることができる場合は、第2補正方法及び第3補正方法も同等の補正精度が得られるが、ある特定条件の下(例えば、無視できない一定の角度誤差γが生じる場合)では、第3補正方法が最も精度が高くなることが云える。
【0062】
尚、上述したように、実施例の補正方法を実現するための解析端末は、コンピュータによって好適に実現することができる。その場合、解析端末による補正方法の各ステップ(図2参照)を実行するための処理内容は、プログラムによって記述される。従って、そのような解析端末として機能するコンピュータに、図2に示す各ステップを実行させるためのプログラムは、コンピュータに接続されるハードディスクなどの記憶装置又はコンピュータ内部に設けられるROM或いはRAMなどの記憶装置に適宜格納することができる。即ち、そのようなプログラムを解析端末として機能するコンピュータが備える中央演算処理装置(CPU)によって実行することにより、本発明の補正方法はコンピュータ上で実現される。この場合に、本補正方法の各処理は、ハードウェアの一部で実現しても良い。
【0063】
更に、この処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体に記録することができる。コンピュータで読み取り可能な記録媒体としては、例えば、磁気記録装置、光ディスク、光磁気記録装置、半導体メモリ等どのようなものでもよい。
【0064】
また、この処理内容を記述したプログラムを、例えばDVD又はCD−ROMなどの可搬型記録媒体の販売、譲渡、貸与等により流通させることができるほか、そのようなプログラムを、ネットワーク上のサーバコンピュータの記録装置に格納しておき、ネットワークを介してサーバコンピュータから他のコンピュータにそのプログラムを転送することにより、流通させることができる。
【0065】
上述の実施例については代表的な例として説明したが、本発明の趣旨及び範囲内で、多くの変更及び置換することができることは当業者に明らかである。例えば、「管路」の意味を建造物又は地中などの埋設管に限定する必要は無く、本発明によればボーリング等による削孔に対しても適用可能である。従って、本発明は、上述の実施例によって制限するものと解するべきではなく、特許請求の範囲によってのみ制限される。
【産業上の利用可能性】
【0066】
本発明によれば、従来の補正方法に加わる新しい補正方法の一つを提供することができる。例えば、慣性計測装置内のジャイロドリフト精度や傾斜角センサ精度、又は方位センサ精度等の条件により、精度を高めるためにどの補正方法を利用するかの選択肢を増やすことができ、管路等の位置計測技術の全体的な精度向上を推進する用途に有用である。
【図面の簡単な説明】
【0067】
【図1】本発明による管路等位置計測の補正方法に用いる管路等計測システムの一例を示す図である。
【図2】本発明による一実施例の補正方法として、解析端末の処理手順を示すフローチャートを示す図である。
【図3】本発明による一実施例の補正方法を検証する際に用いた管路線形を示す図である。
【図4】平面方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図である。
【図5】縦断方向の補正後の最大位置誤差について、第1補正方法と第3補正方法とを比較する図である。
【図6】平面方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図である。
【図7】縦断方向の補正後の最大位置誤差について、第2補正方法と第3補正方法とを比較する図である。
【図8】初期方向角計測誤差が発生していない場合(Δθ=0)を特定条件として設定した場合における、第2補正方法と第3補正方法の位置誤差Δyについてシミュレーションした結果を示す図である。
【図9】初期方向角計測誤差が発生している場合(Δθ=−0.1)を特定条件として設定した場合における、第2補正方法と第3補正方法の位置誤差Δyについてシミュレーションした結果を示す図である。
【図10】図8に示す位置誤差Δyについて、第2補正方法及び第3補正方法により補正した結果を示す図である。
【図11】図9に示す位置誤差Δyについて、第2補正方法及び第3補正方法により補正した結果を示す図である。
【符号の説明】
【0068】
1 計測プローブ
2 解析端末
3 駆動装置
4 距離計
5 管路
6 地中
7 3軸光ファイバジャイロ
8 3軸加速度計
9 中央演算処理装置(CPU)
10 インターフェース(I/F)部
11 電源複合通信用ケーブル
12 通信ケーブル
13 牽引ケーブル
14 慣性計測装置
【特許請求の範囲】
【請求項1】
角度センサを有する慣性計測装置を走査して計測した管路等の位置を解析端末により補正する方法であって、
前記解析端末の処理手順が、
前記管路等のある始点から所定の距離に位置する終点の位置を計測した値、及び、前記終点の位置について予め測量した値から、位置誤差を算出するステップと、
前記終点の位置で計測した前記角度センサから得られる角度値、及び、前記終点の管路位置について予め測量した角度値から、角度誤差を算出するステップと、
前記終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて前記所定の距離の始点及び終点の位置を補正する補正係数を算出するステップと、
前記補正係数に基づいて始点から終点までの管路の位置を補正するステップとを含み、
前記連立方程式は、始点から所定の距離に位置する終点の位置をx、位置誤差をΔy、角度誤差をΔθ、補正係数をc及びdとしたとき、
Δθ=c・x+d
Δy=1/2・c・x2+d・x
で表されることを特徴とする、補正方法。
【請求項1】
角度センサを有する慣性計測装置を走査して計測した管路等の位置を解析端末により補正する方法であって、
前記解析端末の処理手順が、
前記管路等のある始点から所定の距離に位置する終点の位置を計測した値、及び、前記終点の位置について予め測量した値から、位置誤差を算出するステップと、
前記終点の位置で計測した前記角度センサから得られる角度値、及び、前記終点の管路位置について予め測量した角度値から、角度誤差を算出するステップと、
前記終点における位置誤差及び角度誤差から、予め定めた連立方程式に基づいて前記所定の距離の始点及び終点の位置を補正する補正係数を算出するステップと、
前記補正係数に基づいて始点から終点までの管路の位置を補正するステップとを含み、
前記連立方程式は、始点から所定の距離に位置する終点の位置をx、位置誤差をΔy、角度誤差をΔθ、補正係数をc及びdとしたとき、
Δθ=c・x+d
Δy=1/2・c・x2+d・x
で表されることを特徴とする、補正方法。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−31012(P2009−31012A)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2007−192448(P2007−192448)
【出願日】平成19年7月24日(2007.7.24)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【出願人】(000100942)アイレック技建株式会社 (45)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成19年7月24日(2007.7.24)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【出願人】(000100942)アイレック技建株式会社 (45)
[ Back to top ]