
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、箱詰装置に関し、特に、包材からなる物品が隣接する物品と一部分が重なり合った状態で搬送される物品群を起立状態にして箱に収容する箱詰装置に関する。
【背景技術】
【0002】
従来、袋状の包材により包装される物品を段ボール箱等に順次箱詰する箱詰装置が知られている(例えば、特許文献1〜3参照)。
【0003】
特許文献1には、包装済み商品を所定の容器内に順次箱詰めする箱詰装置であって、上記包装済み商品を該商品が供給される供給部からリフト位置に搬送する第1搬送経路を形成する第1搬送手段と、上記リフト位置に搬入された包装済み商品を保持して該リフト位置の上方位置に移送するリフター手段と、該リフター手段によりリフト位置の上方位置に移送された包装済み商品を箱詰め位置上方の待機位置に搬送する第2搬送経路を形成する第2搬送手段と、上記待機位置に設けられて第2搬送手段により搬送された包装済み商品を受止する閉状態と該包装済み商品を待機位置下方の箱詰め位置に供給可能な開状態とに開閉自在とされた受止手段と、上記待機位置の上方に設けられてこの上方位置と箱詰め位置との間で昇降可能とされ、且つ上記受止手段上に受止された包装済み商品を保持して待機位置下方の箱詰め位置に待機させた所定の容器内に該容器の上部開口部より箱詰めする箱詰め手段と、該箱詰め手段による箱詰め動作に同期させて上記受止手段を開閉させる開閉手段とが設けられている箱詰装置が開示されている。
【0004】
また、特許文献2には、包装済み商品の搬送経路の上流側に配置されて該商品についての検査を行なう検査手段と、上記搬送経路の下流側に配置されて該搬送経路上を搬送されてきた包装済み商品を所定の容器に箱詰めする箱詰め手段とを有する箱詰装置であって、上記箱詰め手段が、搬送経路上を複数列に並送されてきた商品を同時に箱詰めするように構成されていると共に、搬送経路上における上記検査手段と箱詰め手段との間に、検査手段により不良品と認められた商品を搬送経路外に排出する排出動作と、検査手段により正常品と認められた商品を搬送経路上において複数列に並列させる並列動作とを行なう振分手段が備えられている箱詰装置が開示されている。
【0005】
また、特許文献3には、搬送路に沿って搬送された物品を保持して搬送路の下方に位置する所定の場所に移送する物品の搬送装置であって、開閉自在に設定され、閉鎖時に前記搬送路上に位置して物品を所定位置まで搬送し、開放時に前記搬送路を鉛直方向に貫通する開口を形成する搬送コンベアと、前記搬送コンベアを開閉する開閉駆動手段と、前記所定位置に搬送された物品を保持し、前記搬送コンベアの開放時に、前記開口を通って前記物品を前記所定の場所に移送する移送手段とを備える搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−263106号公報
【特許文献2】特開平9−301310号公報
【特許文献3】国際公開第94/02394号
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献1〜3に開示される箱詰装置は、いずれも、吸引ヘッドにより吸着された物品を段ボール箱に収容している。ところが、上記した吸引ヘッドを用いる場合においては、吸着部分の平面度が必要になる。このため、外形が変形し得る袋状の包材からなる物品を移送するには、物品を伏状態のまま移送するしかなく、結果的に、伏状態の物品が箱詰されることが多かった。このように、伏状態の物品が箱詰される場合、当該伏状態の物品の大きさに適合した箱を用意しなければならないという制約があった。また、伏状態の物品が箱詰される場合、物品が積層されて箱詰されることになり下方の物品に負担が加わるという不都合もあった。
【0008】
そこで、本発明の目的は、起立姿勢の物品群の箱詰を可能にする箱詰装置を提供することである。
【課題を解決するための手段】
【0009】
一局面に係る箱詰装置は、包材からなる物品が隣接する物品と一部分が重なり合った状態で載置された物品群を所定位置まで搬送する搬送手段と、所定位置において物品群を起立姿勢にする立上手段と、該起立姿勢となった物品群を所定位置から物品群が収容される箱まで移送する移送手段とを備える。
【0010】
この場合、立上手段によって物品群を起立姿勢にした後、移送手段によって当該起立姿勢となった物品群を箱に移送することができるので、起立姿勢の物品群の箱詰が可能となる。
また、物品群を起立姿勢のまま各所に移送する場合、その搬送に伴い物品群の起立姿勢に乱れが生じるが、本発明では、箱に収容される直前の所定位置で物品群が起立姿勢にされるので、起立姿勢の物品群を安定して移送することができる。
また、物品群を一括して起立状態にすることができるので、物品を個別に起立状態にする場合と比べて、箱詰作業のスピードアップを図ることができる。
【0011】
箱詰装置において、立上手段は、物品群の先頭の物品に接触する駆動ベルトを含む。
【0012】
この場合、包材と駆動ベルトとの間の摩擦により、先頭から順次物品が起立状態になるので、物品群を確実に起立姿勢にすることができる。
また、隣接する物品の一部分が重なり合った物品群の先頭にある物品を駆動ベルトにより起立姿勢にすることにより、容易に物品群全体を起立姿勢にすることができる。
【0013】
箱詰装置において、搬送手段の駆動源と駆動ベルトの駆動源とが共通である。
【0014】
この場合、搬送手段により物品群が所定位置に搬送されると同時に、駆動ベルトにより当該物品群を起立姿勢にすることができる。その結果、箱詰め作業のスピードアップを図ることができる。
また、搬送手段と駆動ベルトとの駆動源が共通になるので、箱詰装置の小型化およびコストダウンを図ることができる。
【0015】
箱詰装置において、駆動ベルトの表面は、凹凸形状である。
【0016】
この場合、物品が駆動ベルトの表面上を滑るのを抑止し、物品を確実に起立姿勢にすることができる。
【0017】
箱詰装置において、立上手段は、物品群の搬送面に対して傾斜した状態で固設されている。
【0018】
この場合、搬送手段によって搬送される物品群が傾斜した立上手段に沿って移動することによって物品群が起立姿勢になる。
【0019】
箱詰装置において、立上手段の搬送面に対する傾斜角度を調整可能にした。
【0020】
この場合、物品群の起立姿勢の角度を調整することが可能となる。これにより、搬送面に対して垂直方向に起立した物品群だけでなく、搬送面に対して所定角度方向に起立した物品群も箱に収容することが可能となる。
【0021】
箱詰装置において、立上手段を物品群の搬送方向に沿って移動可能にした。
【0022】
この場合、物品群の大きさが変化(物品群を構成する物品数の変化、物品群を構成する物品の大きさの変化)したり、箱の大きさが変化したりする場合でも、立上手段の位置調整をすることで、それらの変化に対応して箱詰を行うことができる。その結果、汎用性の高い箱詰装置を得ることができる。
【0023】
箱詰装置において、搬送手段は、並設された一対の底面コンベアを含み、立上手段は、一対の底面コンベアのそれぞれに設けられる。
【0024】
この場合、底面コンベアによって搬送される物品群を一対の立上手段によって確実に起立姿勢にすることができる。これにより、物品群の起立姿勢に乱れが生じるのを防止することができる。
【0025】
箱詰装置において、一対の底面コンベアの各々は、それらの間に移送手段を通過させる開口部を形成するように回動可能に構成され、移送手段は、開口部を介して一対の底面コンベアの直下に配置される箱に物品群を移送する。
【0026】
この場合、物品群の箱詰作業を底面コンベアの直下で行うことができるので、箱詰装置による作業スペースの省スペース化を図ることができる。
【0027】
箱詰装置において、所定位置より物品群の搬送方向の上流側に配置される物品検知センサと、移送手段に設けられ、物品群の一部を吸着する吸着部とをさらに備え、物品検知センサによって、所定時間の間、物品が検知されない場合に、吸着部が停止又は低速運転する。
【0028】
吸着部において処理する物品が無い場合に、吸着部の運転が停止又は低速運転となるので、吸着部における電力消費を抑えることができる。
【発明の効果】
【0029】
この発明による箱詰装置では、起立姿勢の物品群の箱詰を可能にすることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施形態に係る箱詰装置の全体構成を示した模式側面図である。
【図2】立上機構の平面図である。
【図3】立上機構の詳細を説明するための図である。
【図4】立上部を示した斜視図である。
【図5】立上機構の正面図である。
【図6】キャッチャの側面図である。
【図7】制御部と各種アクチュエータとの関係を示したブロック図である。
【図8】物品群を起立状態にする立上機構の動作を説明するための図である。
【図9】物品群を起立状態にする立上機構の動作を説明するための図である。
【図10】物品群を起立状態にする立上機構の動作を説明するための図である。
【図11】物品群を起立状態にする立上機構の動作を説明するための図である。
【図12】物品群を起立状態にする立上機構の動作を説明するための図である。
【図13】物品群を起立状態にする立上機構の動作を説明するための図である。
【図14】物品群を起立状態にする立上機構の動作を説明するための図である。
【図15】立上部の角度調整方法を説明するための側面図である。
【図16】立上部の位置調整方法を説明するための側面図である。
【図17】第1変形例に係る立上機構の正面図である。
【図18】第2変形例に係る立上部の側面図である。
【発明を実施するための形態】
【0031】
以下、本発明の一実施形態に係る箱詰装置について図面を参照しながら説明する。
【0032】
(箱詰装置の全体構成)
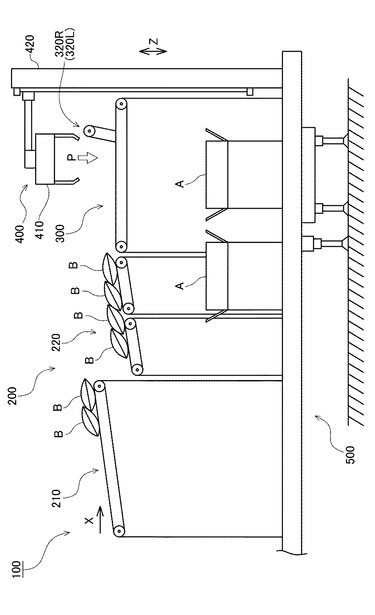
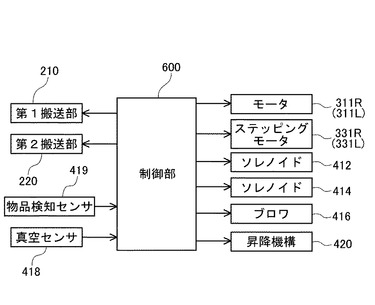
本実施形態の箱詰装置100は、図1に示すように、包装装置(図示せず)により所定重量ずつ袋詰めされたポテトチップス等の袋状の包材からなる物品Bを複数個ずつ段ボール箱Aに自動的に箱詰する装置である。なお、本実施形態では、外形が変形し得る袋状の包材からなる物品Bを段ボール箱Aに箱詰する箱詰装置について説明するが、本発明の箱詰装置は、箱状の包材、その他任意の包材からなる物品を箱詰しても良い。また、ここでは、段ボール箱Aに物品Bを収容する例について説明するが、段ボール箱A以外の任意の箱であっても良い。本実施形態の箱詰装置100は、搬送機構200と、当該搬送機構200により搬送された物品群を起立姿勢にする立上機構300と、当該立上機構300により起立姿勢となった物品Bを複数含む物品群を把持して段ボール箱Aに移送する移送機構400と、段ボール箱Aを供給する箱搬送部500と、箱詰装置100の各部の制御を統括する制御部600とを備えている。
【0033】
(搬送機構)
図1に示すように、搬送機構200は、第1搬送部210と、第1搬送部210の下方に設けられる第2搬送部220とを含んでいる。物品Bの搬送方向(矢印X方向)の上流側から、第1搬送部210,第2搬送部220がこの順に配置されている。これらの第1搬送部210及び第2搬送部220は、ベルトコンベアを有する搬送構造からなる。第1搬送部210は、物品Bをコンベア上で搬送させて、第2搬送部220に当該物品Bを落下させる。落下した物品Bは、第2搬送部220において集積され、隣接する物品Bと一部分が重なり合った状態で載置される。第2搬送部220は、物品Bが第1搬送部210から落下する毎に、所定距離だけベルトコンベアを駆動して、すでに第2搬送部220に載置される物品Bに対して、第1搬送部210から落下する物品Bの一部分が重なり合うようにしている。また、第2搬送部220は、隣接する物品Bの一部分が重なり合った物品群C(本実施形態では、6つの物品Bを一括で段ボール箱Aまで移送するので、6つの物品Bの集合体を物品群C(図8参照)とする)を、搬送方向Xの下流側に配置される立上機構300まで搬送する。なお、第1搬送機構210及び第2搬送機構220は、図7に示すように、制御部600に有線又は無線により通信可能に接続されており、制御部600からの制御信号に基づいて、物品Bの搬送速度等を制御する。
【0034】
(立上機構)
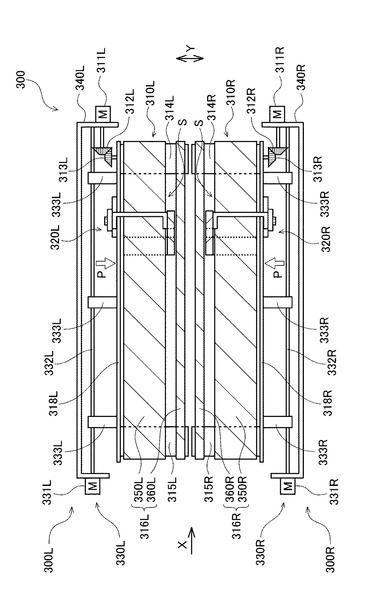
図2に示すように、立上機構300は、搬送方向Xに対して左右一対に並設される右コンベア300R及び左コンベア300Lを備えている。右コンベア300Rは、第2搬送部220により搬送される物品群Cを位置Pまで搬送する底面コンベア310Rと、当該位置Pにおいて物品群Cを起立姿勢にする立上部320Rと、底面コンベア310R及び立上部320Rを開閉させる開閉機構330Rと、外壁340Rとを含んでいる。上記した位置Pは、段ボール箱Aに物品群Cを移送する移送機構400が物品群Cを把持する位置である。なお、右コンベア300Rと左コンベア300Lとの構成及び動作は、略同様であるので、左コンベア300Lについては、Lの代わりにRを付して、その説明を適宜省略する。
【0035】
(底面コンベア)
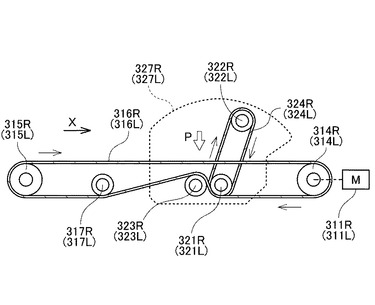
底面コンベア310Rは、搬送機構200により搬送される物品群Cを受け取って、位置Pまで搬送する。図2及び図3に示すように、この底面コンベア310Rは、駆動源となるモータ311Rと、モータ311Rの駆動軸に取り付けられる傘歯車312Rと、傘歯車312Rに噛み合う傘歯車313Rと、傘歯車313Rの回転軸に取り付けられる駆動プーリ314Rと、駆動プーリ314Rと所定の間隔を隔てて設けられる従動プーリ315Rと、駆動プーリ314R及び従動プーリ315Rに巻き掛けられた搬送ベルト316Rと、従動プーリ315Rと後述するプーリ323Rとの間に配置されるプーリ317Rとを有している。モータ311Rは、図7に示すように、制御部600に有線又は無線により通信可能に接続されており、制御部600からの制御信号に基づいて、その回転数を制御し、物品群Cの搬送速度等を制御する。なお、図3における括弧書きの符号は、右コンベア300Rと同様の構成からなる左コンベア300Lの関係を示すために記載している。以下の図においても同様である。
【0036】
図2に示すように、モータ311Rは、搬送方向Xに沿った回転軸を有する傘歯車312Rを回転するために設けられる。傘歯車312R及び傘歯車313Rは、それらの回転軸が直交するように設けられている。すなわち、ここでは、平面視において、モータ311Rからの動力の伝達方向を、搬送方向Xに沿った方向から当該搬送方向Xに直交する方向に変更している。また、駆動プーリ314R、従動プーリ315R及びプーリ317Rは、搬送ベルト316Rの幅方向(矢印Y方向)の外側に配置される側板318Rに回転可能に取り付けられている。
【0037】
搬送ベルト316Rは、駆動プーリ314Rの回転に伴って駆動し、その上面に載置された物品群Cを搬送方向Xに沿って搬送する。図2に示すように、この搬送ベルト316Rは、幅広ベルト350Rと幅狭ベルト360Rとから構成されており、この幅広ベルト350Rと幅狭ベルト360Rとは、所定の間隔を隔てて設けられている。これにより、幅広ベルト350Rと幅狭ベルト360Rとの間に空間Sが形成される。
【0038】
(立上部)
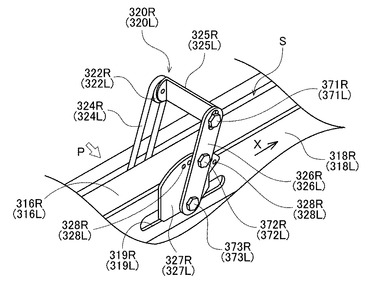
立上部320Rは、底面コンベア310Rによって位置Pまで搬送される物品群Cを、当該位置Pにおいて起立姿勢にするために設けられている。図3及び図4に示すように、立上部320Rは、上記した搬送ベルト316Rの駆動に伴って回転するプーリ321Rと、プーリ321Rと所定の間隔を隔てて設けられるプーリ322Rと、プーリ321Rに隣接して配置されるプーリ323Rと、プーリ321R及びプーリ322Rに巻き掛けられた駆動ベルト324Rと、プーリ322Rを回転可能に支持する軸受板325Rと、軸受板325Rを上記した搬送ベルト316Rの上方位置で支持する支持板326Rと、支持板326Rを所定の角度で固定する角度調整板327Rとを有している。
【0039】
図3に示すように、プーリ321Rは、搬送ベルト316Rの内側に当接するように設けられ、上記した搬送ベルト316Rの駆動に伴って回転する。また、プーリ323Rは、搬送ベルト316Rの駆動力をプーリ321Rに付与するように、プーリ321Rに隣接して設けられる。これにより、モータ311Rが駆動することによって、搬送ベルト316Rと駆動ベルト324Rとが共に駆動する。すなわち、本実施形態では、搬送ベルト316Rの駆動源と駆動ベルト324Rの駆動源とが共通となっている。従って、搬送ベルト316Rが駆動している間は、駆動ベルト324Rも駆動することになる。なお、プーリ321R及びプーリ323Rは、角度調整板327Rに回転可能に軸支されている。
【0040】
本実施形態の駆動ベルト324Rは、底面コンベア310Rによって搬送される物品群Cの先頭の物品Bに接触するように配置されている。この駆動ベルト324Rは、上記した幅広ベルト350Rと幅狭ベルト360Rとの間に形成される空間Sに配置されている。駆動ベルト324Rは、物品群Cの先頭の物品Bとの間に摩擦力が生じるようにゴム製となっている。さらに、この駆動ベルト324Rの表面には、凹凸形状が形成されている。
【0041】
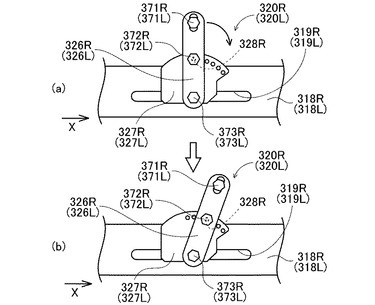
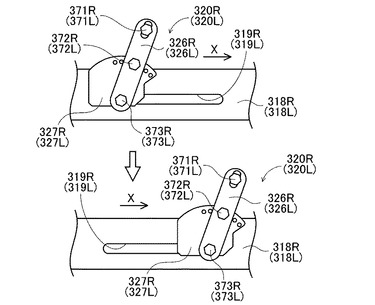
図4に示すように、軸受板325Rは、搬送ベルト316Rの上方位置において、プーリ322Rを空間Sに対応する位置で回転可能に支持するために設けられている。この軸受板325Rは、ボルト371Rによって支持板326Rに固定されている。そして、支持板326Rは、ボルト372R及び373Rによって所定の角度で角度調整板327Rに固定されている。本実施形態では、角度調整板327Rに所定のピッチで複数の孔328Rが形成されており、当該複数の孔328Rのいずれかにボルト372Rを締結することによって、支持板326Rの搬送面に対する傾斜角度が調整可能となる。なお、本実施形態では、支持板326Rが物品群Cの搬送面に対して傾斜した状態で固設されている。また、本実施形態では、角度調整板327Rは、側板318Rに形成される長孔319Rの長軸方向(搬送方向X及びその反対方向)に沿って移動可能であって、ボルト373Rの締結位置を所望の位置にすることによって、角度調整板327Rの位置が調整可能となる。
【0042】
(開閉機構)
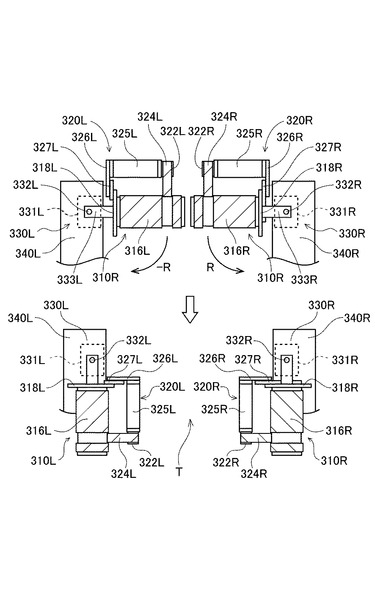
図5に示すように、開閉機構330R及び330Lは、右コンベア300Rと左コンベア300Lとの間に、後述する移送機構400のキャッチャ410を通過させる開口部Tを形成するように、底面コンベア310R及び310Lのそれぞれを回転させる。この開閉機構330Rは、駆動源となるステッピングモータ331Rと、ステッピングモータ331Rの駆動軸に取り付けられる回転シャフト332Rと、回転シャフト332R及び上記した側板318Rを連結する連結部333Rとを有している。本実施形態の開閉機構330Rは、搬送ベルト316Rの搬送面が水平状態から鉛直状態になるように、底面コンベア310Rを下方(R方向)に略90度回転させる。ステッピングモータ331Rは、外壁340Rに取り付けられており、回転シャフト332Rを回転させる。また、回転シャフト332Rは、物品群Cの搬送方向Xに沿って設けられ、外壁340Rに回転可能に軸支される。また、連結部333Rは、回転シャフト332Rと共に回転するように構成されている。なお、ステッピングモータ331Rは、図7に示すように、制御部600からの制御信号(パルス数)に基づいて、その回転数を制御し、右コンベア300Rの回転角度を制御する。
【0043】
(移送機構)
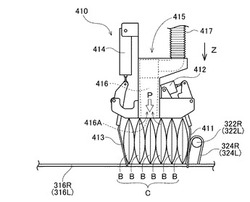
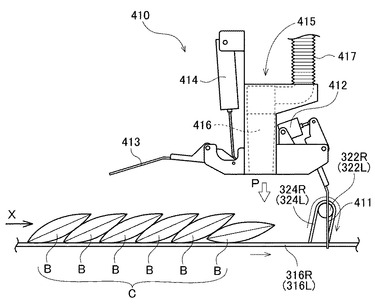
図1に示すように、移送機構400は、立上機構300により起立姿勢となった物品群Cを位置Pからその直下に配置される段ボール箱Aまで移送するために設けられている。この移送機構400は、物品群Cを把持するキャッチャ410と、キャッチャ410を上下方向(Z方向)に昇降させる昇降機構420とを含んでいる。
【0044】
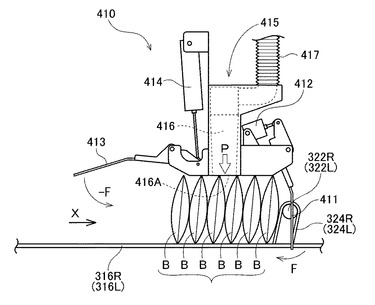
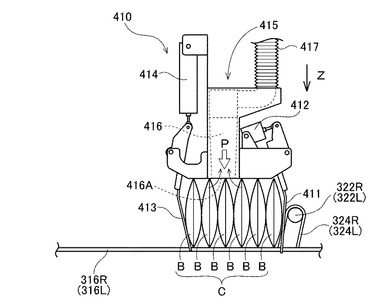
(キャッチャ)
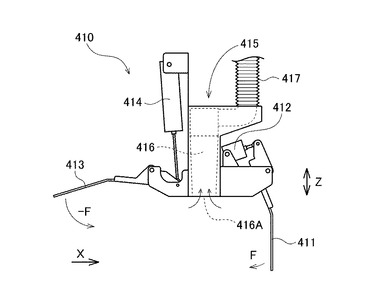
図6に示すように、キャッチャ410は、物品群Cの先頭の物品Bに接触するアーム411と、アーム411を回転させるソレノイド412と、物品群Cの末尾の物品Bに接触するアーム413と、アーム413を回転させるソレノイド414と、物品群Cを吸引する吸着部415とを有している。なお、ソレノイド412及び414は、図7に示すように、制御部600からの制御信号に基づいて、そのストローク量を調整してアーム411及び413のそれぞれを開閉させる。本実施形態では、物品群Cが起立状態になったタイミングで、アーム411及び413を内側に回転させる。また、吸着部415は、吸引口416Aを介して空気を吸い込むブロワ416と、当該ブロワ416に接続される配管417とを有している。なお、ブロワ416は、制御部600からの制御信号に基づいて、所定のタイミングで物品群Cを吸引する。このブロワ416は、その吸引口416Aからアーム411及びアーム413に当接しない物品B(物品群Cの先頭B及び末尾の物品B以外の物品B)を吸引して、物品群Cを把持した際に、当該物品Bが落下しないようにしている。本実施形態では、図7に示すように、ブロワ416による物品Bの吸着圧力を検出する真空センサ418と、位置Pの搬送方向Xの上流側に配置される物品検知センサ419とが、制御部600に通信可能に接続されている。ここで、本実施形態では、制御部600は、所定時間の間、物品検知センサ419によって物品Bが検知されない場合に、ブロワ416を停止又は低速運転する。すなわち、物品群Cがアーム411及び413に把持されて移送されるときだけ、ブロワ416の通常運転が行われる。
【0045】
(昇降機構)
昇降機構420は、キャッチャ410に把持された物品群Cを段ボール箱Aに収容するために、当該キャッチャ410を直下に移送する。なお、この昇降機構420は、図7に示すように、制御部600からの制御信号に基づいて、キャッチャ410の昇降移動を制御する。
【0046】
(箱詰装置の動作)
次に、図5及び図8〜図14を参照して、箱詰装置100が物品群Cを段ボール箱Aに箱詰する動作について説明を行う。
【0047】
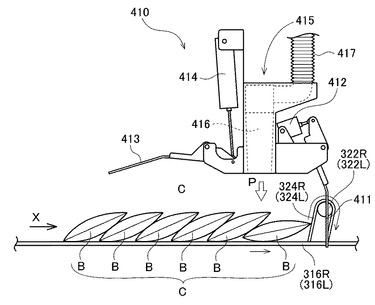
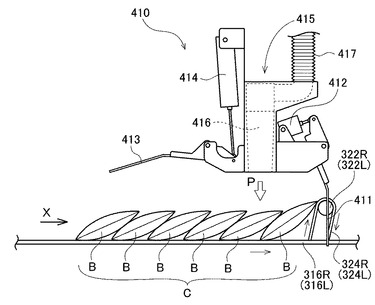
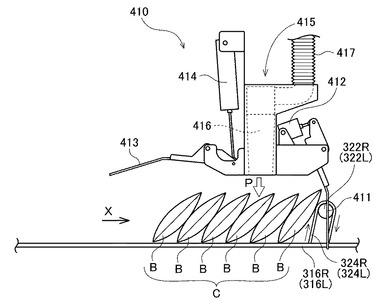
図8に示すように、搬送機構200により隣接する物品Bの一部分が重なり合った物品群Cが底面コンベア310Rに移動されると、底面コンベア310Rの搬送ベルト316R上で物品群Cが搬送方向Xに沿って移動される。そして、搬送方向Xに沿って移動される物品群Cは、図9に示すように、その先頭の物品Bが駆動ベルト324Rに接触するまで搬送される。本実施形態では、搬送ベルト316Rと駆動ベルト324Rとが連動しているので、図10に示すように、物品群Cは搬送方向Xに搬送されつつ、その先頭の物品Bは、駆動ベルト324Rの駆動に伴って、その先端が持ち上げられる。その後、図11に示すように、先頭の物品Bの立ち上がりに伴って隣接する物品Bが立ち上がり、物品群Cを構成する複数の物品Bが先頭から順次立ち上がる。
【0048】
そして、図12に示すように、物品群Cを構成する物品Bの全てが起立姿勢になると、搬送ベルト316R及び駆動ベルト324Rの駆動が停止される。次に、アーム411が内側(矢印F方向)に回転すると共に、アーム413が内側(矢印−F方向)に回転して、図14に示すように、当該起立姿勢の物品群Cが把持される。これにより、物品群Cが整列圧縮されて、当該物品群Cの嵩が抑えられる。この際、物品群Cが移送中に落下しないように、ブロワ416の吸引口416Aから物品群Cが吸引される。特に、本実施形態では、アーム411及びアーム413が直接接触しない物品Bをブロワ416が吸引することによって、当該物品Bが移送中に落下するのを防止する。
【0049】
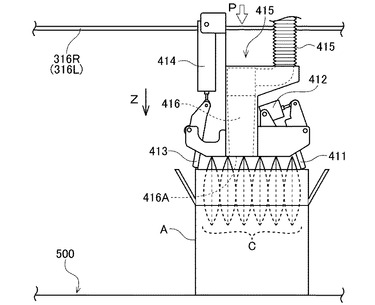
そして、本実施形態では、図5に示すように、底面コンベア310R及び310Lがそれぞれ反対方向(矢印R方向、矢印−R方向)に回転することによって、開口部Tを形成する。これにより、図14に示すように、キャッチャ410により把持された物品群Cは、当該開口部Tを介して、底面コンベア310R及び310Lの直下に配置される段ボール箱Aに移送される。具体的には、物品群Cを把持したキャッチャ410が昇降機構420により矢印Z方向に降下されることによって、物品群Cが段ボール箱Aまで搬送される。次に、アーム411及びアーム413がそれぞれ外側に回転して、物品群Cの把持が解除される。このようにして、段ボール箱Aに起立姿勢の物品群Cが収容される。
【0050】
なお、ブロワ416の運転は、アーム411及びアーム413によって物品群Cが把持される直前または物品群Cが把持された直後から、当該物品群Cが段ボール箱Aに収容されて物品群Cの把持が解除されるまでの期間である。この際、制御部600は、真空センサ418によって取得される吸着圧力に基づいて、必要な吸引力を制御することができる。すなわち、本実施形態では、物品Bの包材の形状及び材質、物品Bの重量、並びに、物品群Cを構成する物品Bの個数等に応じて、必要な吸引力を選択することができる。
【0051】
(立上部の角度調整)
次に、図15を参照して、立上部320Rの角度調整の方法について説明する。本実施形態では、物品群Cの搬送面に対して立上部320Rの角度調整を行うことによって、物品群Cの起立姿勢を調整することができる。
【0052】
立上部320Rの角度調整は、角度調整板327Rに固定される支持板326Rの角度を調整することによって行う。ここでは、搬送面に対して略垂直に配置される立上部320R(図15(a)参照)を、搬送方向X側に傾倒する例(図15(b)参照)について説明する。
【0053】
まず、図15(a)に示すように、角度調整板327Rの最も上方位置に形成される孔328Rに締め付けられるボルト372Rを外し、支持板326Rと角度調整板327Rとの固定を解除する。そして、支持板326Rを、ボルト373Rを中心として、搬送方向X側に傾倒させて、支持板326Rの角度調整を行う。ここで、図15(b)に示すように、角度調整した支持板326Rに対応する角度調整板327Rの孔328Rにボルト372Rを締め付ける。以上のようにして、立上部320Rの角度調整が行われる。
【0054】
(立上部の位置調整)
次に、図16を参照して、立上部320Rの搬送方向Xに沿った位置調整の方法について説明する。本実施形態では、立上部320Rの固設位置の位置調整を行うことによって、物品群Cを構成する物品Bの個数や物品Bの大きさが変化する場合等、任意の位置Pで物品群Cを起立姿勢にすることができる。
【0055】
立上部320Rの固設位置の位置調整は、角度調整板327Rを搬送方向X及びその反対方向に移動させることによって行う。具体的には、側板318Rに形成される長孔319Rに沿って角度調整板327Rを移動させることによって、立上部320Rの固設位置を調整する。ここでは、図16(a)及び(b)に示すように、搬送機構200側に配置される立上部320Rを搬送方向Xに移動させる例について説明する。
【0056】
図16(a)に示すように、搬送機構200側に配置される立上部320Rにおいて、まず、角度調整板327Rを側板318Rに固定するボルト373Rを緩める。これにより、角度調整板327Rと側板318Rとの固定が解除されて、角度調整板327Rが長孔319Rに沿って移動可能となる。ここで、角度調整板327Rを搬送方向Xに沿って移動させて、任意の位置に配置する。そこで、ボルト373Rを締め付けることによって、角度調整板327Rが側板318Rに固定されて、立上部320Rの位置調整が行われる。
【0057】
(本実施形態における効果)
以上のように、本実施形態に係る箱詰装置100においては、位置Pにおいて物品群Cを起立姿勢にする立上部320R及び320Lと、該起立姿勢となった物品群Cを位置Pから物品群Cが収容される段ボール箱Aまで移送する移送機構400とを設けることによって、立上部320R及び320Lによって物品群Cを起立姿勢にした後、移送機構400によって当該起立姿勢となった物品群Cを段ボール箱Aに移送することができるので、起立姿勢の物品群Cの箱詰が可能となる。
【0058】
また、物品群Cを起立姿勢のまま各所に搬送する場合、その搬送に伴い物品群Cの起立姿勢に乱れが生じるが、本実施形態では、段ボール箱Aに収容される直前の位置Pで物品群Cが起立姿勢にされるので、起立姿勢の物品群Cを安定して箱詰することができる。
【0059】
また、本実施形態では、立上部320R及び320Lによって、物品群Cを一括して起立状態にすることができるので、物品Bを個別に起立状態にする場合と比べて、箱詰作業のスピードアップを図ることができる。
【0060】
また、本実施形態では、駆動ベルト324R及び324Lをゴム製にすることによって、駆動ベルト324R及び324Lと、物品Bとの間に発生する摩擦力により、物品群Cを確実に起立姿勢にすることができる。
【0061】
また、本実施形態では、駆動ベルト324R及び324Lの表面に凹凸形状を形成することによって、物品Bが駆動ベルト324R及び324Lの表面上を滑るのを抑止し、物品群Cを確実に起立姿勢にすることができる。
【0062】
また、本実施形態では、隣接する物品Bの一部分が重なり合った物品群Cの先頭にある物品Bを駆動ベルト324R及び324Lにより起立姿勢にすることにより、容易に物品群C全体を起立姿勢にすることができる。
【0063】
また、本実施形態では、底面コンベア310R及び310Lの駆動源と、駆動ベルト324R及び324Lの駆動源とを共通にすることによって、底面コンベア310R及び310Lにより物品群Cが位置Pに搬送されると同時に、駆動ベルト324R及び324Lにより当該物品群Cを起立姿勢にすることができる。その結果、箱詰め作業のスピードアップを図ることができる。また、本実施形態では、上記した駆動源の共通化により、箱詰装置100の小型化およびコストダウンを図ることができる。
【0064】
また、本実施形態では、搬送ベルト316R及び316Lと、駆動ベルト324R及び324Lとの連動によって、物品群Cが立ち上がる同時に整列圧縮して、嵩が抑えられる。その結果、容積に制限がある段ボール箱Aに多数の物品Bを収容することが可能となる。
【0065】
また、本実施形態では、立上部320R及び320Lが搬送面に対して傾斜した状態で固設されることによって、底面コンベア310R及び310Lによって搬送される物品群Cが傾斜した駆動ベルト324R及び324Lに沿って移動することによって物品群Cが起立姿勢になる。
【0066】
また、本実施形態では、立上部320R及び320Lの搬送面に対する傾斜角度を調整可能にすることによって、物品群Cの起立姿勢の角度を調整することができる。これにより、搬送面に対して垂直方向に起立した物品群Cだけでなく、搬送面に対して所定角度方向に起立した物品群Cも段ボール箱Aに収容することが可能となる。
【0067】
また、本実施形態では、立上部320R及び320Lを搬送方向Xに沿って移動可能にすることによって、物品群Cの大きさが変化(物品群Cを構成する物品Bの個数の変化、物品群Cを構成する物品Bの大きさの変化)したり、段ボール箱Aの大きさが変化したりする場合でも、立上部320R及び320Lの位置調整をすることで、それらの変化に対応して箱詰を行うことができる。その結果、汎用性の高い箱詰装置100を得ることができる。
【0068】
また、本実施形態では、一対の底面コンベア310R及び310Lの各々に立上部320R及び320Lを設けることによって、その一対の立上部320R及び320Lによって確実に物品群Cを起立姿勢にすることができる。これにより、物品群Cの起立姿勢に乱れが生じるのを防止することができる。
【0069】
また、本実施形態では、一対の底面コンベア310R及び310Lが、それらの間にキャッチャ410を通過させる開口部Tを形成するように回動可能に構成され、且つ、キャッチャ410が、開口部Tを介して一対の底面コンベア310R及び310Lの直下に配置される段ボール箱Aに物品群Cを移送することによって、物品群Cの箱詰作業を底面コンベア310R及び310Lの直下で行うことができるので、箱詰装置100による作業スペースの省スペース化を図ることができる。
【0070】
また、本実施形態では、物品検知センサ419により物品Bが検知されて、物品群Cがキャッチャ410に把持されて移送されるときだけ、ブロワ416が通常運転を行うので、ブロワ416の運転に係る騒音を抑制することができると共に、ブロワ416の消費電力が大きくなるのを抑制することができる。その結果、CO2の発生の抑制と共に工場環境の改善にもつながる。
【0071】
また、本実施形態では、真空センサ418によりブロワ416による物品Bの吸着圧力を検出することによって、当該圧力が、物品Bの包材の形状及び材質、物品Bの重量、並びに、物品群Cを構成する物品Bの個数等に応じた適正範囲か否かを確認することができる。したがって、ブロワ416による吸引圧力が過大である場合には、ブロワ416の運転周波数を下げて低速運転を行うことにより、不要な電力消費を削減することができる。
【0072】
<請求項の各構成要素と上記実施形態の各部との対応関係>
上記実施形態においては、箱詰装置100が「箱詰装置」に相当し、物品Bが「物品」に相当し、物品群Cが「物品群」に相当し、位置Pが「所定位置」に相当し、底面コンベア310R及び310Lが「搬送手段」及び「底面コンベア」に相当し、立上部320R及び320Lが「立上手段」に相当し、段ボール箱Aが「箱」に相当し、移送機構400が「移送手段」に相当し、駆動ベルト324R及び324Lが「駆動ベルト」に相当し、開口部Tが「開口部」に相当し、物品検知センサ419が「物品検知センサ」に相当し、吸着部415が「吸着部」に相当する。
【0073】
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、これらの実施形態に限定されるものでないと考えられるべきである。本発明の範囲は、上記した実施形態の説明だけではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0074】
<第1変形例>
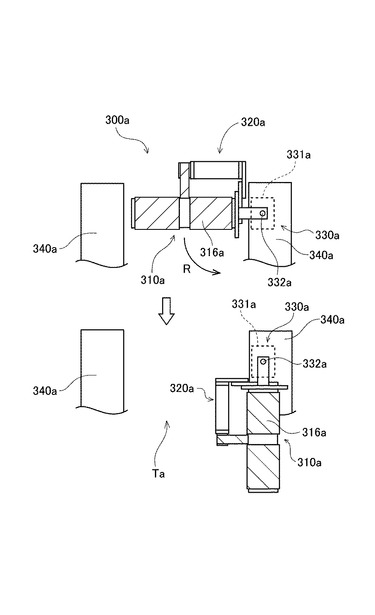
例えば、上記実施形態では、一対の底面コンベア310R及び310Lを設ける例について説明したが、本発明はこれに限らず、図17に示した片開きの底面コンベア310aを採用しても良い。すなわち、第1変形例に係る立上機構300aは、1つの底面コンベア310aと、底面コンベア310aの搬送コンベア316a上を搬送される物品群を起立姿勢にする立上部320aと、底面コンベア310a及び立上部320aを下方(矢印R方向)に回転させる開閉機構330aとを備えている。底面コンベア310aは、開閉機構330aの回転シャフト332aに回転可能に取り付けられており、当該回転シャフト332aが駆動源であるモータ331aの駆動に伴って回転したときに、キャッチャ410(図1参照)を通過させる開口部Taを形成する。
【0075】
上記構成によれば、一対の右コンベア300Rと左コンベア300Lを有する実施形態に係る立上機構300と異なり、立上機構300aの構成が複雑になるのを防止することができると共に、コストダウンを図ることができる。
【0076】
<第2変形例>
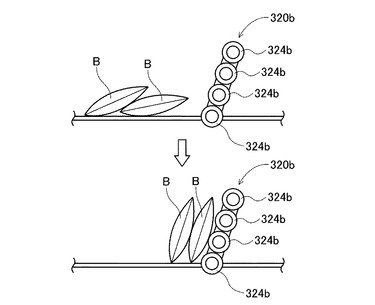
また、上記実施形態では、駆動ベルト324R及び324Lを有する立上部320R及び320Lについて説明したが、本発明はこれに限らず、図18に示した第2変形例に係る立上部320bであっても良い。すなわち、第2変形例に係る立上部320bは、回転可能に軸支される複数のローラ324bが傾斜して並んで配置されている。このローラ324bは、駆動ローラであっても従動ローラであっても良い。
【符号の説明】
【0077】
100 箱詰装置
310R,310L,310a 底面コンベア
320R,320L,320a,320b 立上部
324R,324L 駆動ベルト
400 移送機構
415 吸着部
419 物品検知センサ
A 段ボール箱
B 物品
C 物品群
P 位置
【技術分野】
【0001】
本発明は、箱詰装置に関し、特に、包材からなる物品が隣接する物品と一部分が重なり合った状態で搬送される物品群を起立状態にして箱に収容する箱詰装置に関する。
【背景技術】
【0002】
従来、袋状の包材により包装される物品を段ボール箱等に順次箱詰する箱詰装置が知られている(例えば、特許文献1〜3参照)。
【0003】
特許文献1には、包装済み商品を所定の容器内に順次箱詰めする箱詰装置であって、上記包装済み商品を該商品が供給される供給部からリフト位置に搬送する第1搬送経路を形成する第1搬送手段と、上記リフト位置に搬入された包装済み商品を保持して該リフト位置の上方位置に移送するリフター手段と、該リフター手段によりリフト位置の上方位置に移送された包装済み商品を箱詰め位置上方の待機位置に搬送する第2搬送経路を形成する第2搬送手段と、上記待機位置に設けられて第2搬送手段により搬送された包装済み商品を受止する閉状態と該包装済み商品を待機位置下方の箱詰め位置に供給可能な開状態とに開閉自在とされた受止手段と、上記待機位置の上方に設けられてこの上方位置と箱詰め位置との間で昇降可能とされ、且つ上記受止手段上に受止された包装済み商品を保持して待機位置下方の箱詰め位置に待機させた所定の容器内に該容器の上部開口部より箱詰めする箱詰め手段と、該箱詰め手段による箱詰め動作に同期させて上記受止手段を開閉させる開閉手段とが設けられている箱詰装置が開示されている。
【0004】
また、特許文献2には、包装済み商品の搬送経路の上流側に配置されて該商品についての検査を行なう検査手段と、上記搬送経路の下流側に配置されて該搬送経路上を搬送されてきた包装済み商品を所定の容器に箱詰めする箱詰め手段とを有する箱詰装置であって、上記箱詰め手段が、搬送経路上を複数列に並送されてきた商品を同時に箱詰めするように構成されていると共に、搬送経路上における上記検査手段と箱詰め手段との間に、検査手段により不良品と認められた商品を搬送経路外に排出する排出動作と、検査手段により正常品と認められた商品を搬送経路上において複数列に並列させる並列動作とを行なう振分手段が備えられている箱詰装置が開示されている。
【0005】
また、特許文献3には、搬送路に沿って搬送された物品を保持して搬送路の下方に位置する所定の場所に移送する物品の搬送装置であって、開閉自在に設定され、閉鎖時に前記搬送路上に位置して物品を所定位置まで搬送し、開放時に前記搬送路を鉛直方向に貫通する開口を形成する搬送コンベアと、前記搬送コンベアを開閉する開閉駆動手段と、前記所定位置に搬送された物品を保持し、前記搬送コンベアの開放時に、前記開口を通って前記物品を前記所定の場所に移送する移送手段とを備える搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平6−263106号公報
【特許文献2】特開平9−301310号公報
【特許文献3】国際公開第94/02394号
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献1〜3に開示される箱詰装置は、いずれも、吸引ヘッドにより吸着された物品を段ボール箱に収容している。ところが、上記した吸引ヘッドを用いる場合においては、吸着部分の平面度が必要になる。このため、外形が変形し得る袋状の包材からなる物品を移送するには、物品を伏状態のまま移送するしかなく、結果的に、伏状態の物品が箱詰されることが多かった。このように、伏状態の物品が箱詰される場合、当該伏状態の物品の大きさに適合した箱を用意しなければならないという制約があった。また、伏状態の物品が箱詰される場合、物品が積層されて箱詰されることになり下方の物品に負担が加わるという不都合もあった。
【0008】
そこで、本発明の目的は、起立姿勢の物品群の箱詰を可能にする箱詰装置を提供することである。
【課題を解決するための手段】
【0009】
一局面に係る箱詰装置は、包材からなる物品が隣接する物品と一部分が重なり合った状態で載置された物品群を所定位置まで搬送する搬送手段と、所定位置において物品群を起立姿勢にする立上手段と、該起立姿勢となった物品群を所定位置から物品群が収容される箱まで移送する移送手段とを備える。
【0010】
この場合、立上手段によって物品群を起立姿勢にした後、移送手段によって当該起立姿勢となった物品群を箱に移送することができるので、起立姿勢の物品群の箱詰が可能となる。
また、物品群を起立姿勢のまま各所に移送する場合、その搬送に伴い物品群の起立姿勢に乱れが生じるが、本発明では、箱に収容される直前の所定位置で物品群が起立姿勢にされるので、起立姿勢の物品群を安定して移送することができる。
また、物品群を一括して起立状態にすることができるので、物品を個別に起立状態にする場合と比べて、箱詰作業のスピードアップを図ることができる。
【0011】
箱詰装置において、立上手段は、物品群の先頭の物品に接触する駆動ベルトを含む。
【0012】
この場合、包材と駆動ベルトとの間の摩擦により、先頭から順次物品が起立状態になるので、物品群を確実に起立姿勢にすることができる。
また、隣接する物品の一部分が重なり合った物品群の先頭にある物品を駆動ベルトにより起立姿勢にすることにより、容易に物品群全体を起立姿勢にすることができる。
【0013】
箱詰装置において、搬送手段の駆動源と駆動ベルトの駆動源とが共通である。
【0014】
この場合、搬送手段により物品群が所定位置に搬送されると同時に、駆動ベルトにより当該物品群を起立姿勢にすることができる。その結果、箱詰め作業のスピードアップを図ることができる。
また、搬送手段と駆動ベルトとの駆動源が共通になるので、箱詰装置の小型化およびコストダウンを図ることができる。
【0015】
箱詰装置において、駆動ベルトの表面は、凹凸形状である。
【0016】
この場合、物品が駆動ベルトの表面上を滑るのを抑止し、物品を確実に起立姿勢にすることができる。
【0017】
箱詰装置において、立上手段は、物品群の搬送面に対して傾斜した状態で固設されている。
【0018】
この場合、搬送手段によって搬送される物品群が傾斜した立上手段に沿って移動することによって物品群が起立姿勢になる。
【0019】
箱詰装置において、立上手段の搬送面に対する傾斜角度を調整可能にした。
【0020】
この場合、物品群の起立姿勢の角度を調整することが可能となる。これにより、搬送面に対して垂直方向に起立した物品群だけでなく、搬送面に対して所定角度方向に起立した物品群も箱に収容することが可能となる。
【0021】
箱詰装置において、立上手段を物品群の搬送方向に沿って移動可能にした。
【0022】
この場合、物品群の大きさが変化(物品群を構成する物品数の変化、物品群を構成する物品の大きさの変化)したり、箱の大きさが変化したりする場合でも、立上手段の位置調整をすることで、それらの変化に対応して箱詰を行うことができる。その結果、汎用性の高い箱詰装置を得ることができる。
【0023】
箱詰装置において、搬送手段は、並設された一対の底面コンベアを含み、立上手段は、一対の底面コンベアのそれぞれに設けられる。
【0024】
この場合、底面コンベアによって搬送される物品群を一対の立上手段によって確実に起立姿勢にすることができる。これにより、物品群の起立姿勢に乱れが生じるのを防止することができる。
【0025】
箱詰装置において、一対の底面コンベアの各々は、それらの間に移送手段を通過させる開口部を形成するように回動可能に構成され、移送手段は、開口部を介して一対の底面コンベアの直下に配置される箱に物品群を移送する。
【0026】
この場合、物品群の箱詰作業を底面コンベアの直下で行うことができるので、箱詰装置による作業スペースの省スペース化を図ることができる。
【0027】
箱詰装置において、所定位置より物品群の搬送方向の上流側に配置される物品検知センサと、移送手段に設けられ、物品群の一部を吸着する吸着部とをさらに備え、物品検知センサによって、所定時間の間、物品が検知されない場合に、吸着部が停止又は低速運転する。
【0028】
吸着部において処理する物品が無い場合に、吸着部の運転が停止又は低速運転となるので、吸着部における電力消費を抑えることができる。
【発明の効果】
【0029】
この発明による箱詰装置では、起立姿勢の物品群の箱詰を可能にすることができる。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施形態に係る箱詰装置の全体構成を示した模式側面図である。
【図2】立上機構の平面図である。
【図3】立上機構の詳細を説明するための図である。
【図4】立上部を示した斜視図である。
【図5】立上機構の正面図である。
【図6】キャッチャの側面図である。
【図7】制御部と各種アクチュエータとの関係を示したブロック図である。
【図8】物品群を起立状態にする立上機構の動作を説明するための図である。
【図9】物品群を起立状態にする立上機構の動作を説明するための図である。
【図10】物品群を起立状態にする立上機構の動作を説明するための図である。
【図11】物品群を起立状態にする立上機構の動作を説明するための図である。
【図12】物品群を起立状態にする立上機構の動作を説明するための図である。
【図13】物品群を起立状態にする立上機構の動作を説明するための図である。
【図14】物品群を起立状態にする立上機構の動作を説明するための図である。
【図15】立上部の角度調整方法を説明するための側面図である。
【図16】立上部の位置調整方法を説明するための側面図である。
【図17】第1変形例に係る立上機構の正面図である。
【図18】第2変形例に係る立上部の側面図である。
【発明を実施するための形態】
【0031】
以下、本発明の一実施形態に係る箱詰装置について図面を参照しながら説明する。
【0032】
(箱詰装置の全体構成)
本実施形態の箱詰装置100は、図1に示すように、包装装置(図示せず)により所定重量ずつ袋詰めされたポテトチップス等の袋状の包材からなる物品Bを複数個ずつ段ボール箱Aに自動的に箱詰する装置である。なお、本実施形態では、外形が変形し得る袋状の包材からなる物品Bを段ボール箱Aに箱詰する箱詰装置について説明するが、本発明の箱詰装置は、箱状の包材、その他任意の包材からなる物品を箱詰しても良い。また、ここでは、段ボール箱Aに物品Bを収容する例について説明するが、段ボール箱A以外の任意の箱であっても良い。本実施形態の箱詰装置100は、搬送機構200と、当該搬送機構200により搬送された物品群を起立姿勢にする立上機構300と、当該立上機構300により起立姿勢となった物品Bを複数含む物品群を把持して段ボール箱Aに移送する移送機構400と、段ボール箱Aを供給する箱搬送部500と、箱詰装置100の各部の制御を統括する制御部600とを備えている。
【0033】
(搬送機構)
図1に示すように、搬送機構200は、第1搬送部210と、第1搬送部210の下方に設けられる第2搬送部220とを含んでいる。物品Bの搬送方向(矢印X方向)の上流側から、第1搬送部210,第2搬送部220がこの順に配置されている。これらの第1搬送部210及び第2搬送部220は、ベルトコンベアを有する搬送構造からなる。第1搬送部210は、物品Bをコンベア上で搬送させて、第2搬送部220に当該物品Bを落下させる。落下した物品Bは、第2搬送部220において集積され、隣接する物品Bと一部分が重なり合った状態で載置される。第2搬送部220は、物品Bが第1搬送部210から落下する毎に、所定距離だけベルトコンベアを駆動して、すでに第2搬送部220に載置される物品Bに対して、第1搬送部210から落下する物品Bの一部分が重なり合うようにしている。また、第2搬送部220は、隣接する物品Bの一部分が重なり合った物品群C(本実施形態では、6つの物品Bを一括で段ボール箱Aまで移送するので、6つの物品Bの集合体を物品群C(図8参照)とする)を、搬送方向Xの下流側に配置される立上機構300まで搬送する。なお、第1搬送機構210及び第2搬送機構220は、図7に示すように、制御部600に有線又は無線により通信可能に接続されており、制御部600からの制御信号に基づいて、物品Bの搬送速度等を制御する。
【0034】
(立上機構)
図2に示すように、立上機構300は、搬送方向Xに対して左右一対に並設される右コンベア300R及び左コンベア300Lを備えている。右コンベア300Rは、第2搬送部220により搬送される物品群Cを位置Pまで搬送する底面コンベア310Rと、当該位置Pにおいて物品群Cを起立姿勢にする立上部320Rと、底面コンベア310R及び立上部320Rを開閉させる開閉機構330Rと、外壁340Rとを含んでいる。上記した位置Pは、段ボール箱Aに物品群Cを移送する移送機構400が物品群Cを把持する位置である。なお、右コンベア300Rと左コンベア300Lとの構成及び動作は、略同様であるので、左コンベア300Lについては、Lの代わりにRを付して、その説明を適宜省略する。
【0035】
(底面コンベア)
底面コンベア310Rは、搬送機構200により搬送される物品群Cを受け取って、位置Pまで搬送する。図2及び図3に示すように、この底面コンベア310Rは、駆動源となるモータ311Rと、モータ311Rの駆動軸に取り付けられる傘歯車312Rと、傘歯車312Rに噛み合う傘歯車313Rと、傘歯車313Rの回転軸に取り付けられる駆動プーリ314Rと、駆動プーリ314Rと所定の間隔を隔てて設けられる従動プーリ315Rと、駆動プーリ314R及び従動プーリ315Rに巻き掛けられた搬送ベルト316Rと、従動プーリ315Rと後述するプーリ323Rとの間に配置されるプーリ317Rとを有している。モータ311Rは、図7に示すように、制御部600に有線又は無線により通信可能に接続されており、制御部600からの制御信号に基づいて、その回転数を制御し、物品群Cの搬送速度等を制御する。なお、図3における括弧書きの符号は、右コンベア300Rと同様の構成からなる左コンベア300Lの関係を示すために記載している。以下の図においても同様である。
【0036】
図2に示すように、モータ311Rは、搬送方向Xに沿った回転軸を有する傘歯車312Rを回転するために設けられる。傘歯車312R及び傘歯車313Rは、それらの回転軸が直交するように設けられている。すなわち、ここでは、平面視において、モータ311Rからの動力の伝達方向を、搬送方向Xに沿った方向から当該搬送方向Xに直交する方向に変更している。また、駆動プーリ314R、従動プーリ315R及びプーリ317Rは、搬送ベルト316Rの幅方向(矢印Y方向)の外側に配置される側板318Rに回転可能に取り付けられている。
【0037】
搬送ベルト316Rは、駆動プーリ314Rの回転に伴って駆動し、その上面に載置された物品群Cを搬送方向Xに沿って搬送する。図2に示すように、この搬送ベルト316Rは、幅広ベルト350Rと幅狭ベルト360Rとから構成されており、この幅広ベルト350Rと幅狭ベルト360Rとは、所定の間隔を隔てて設けられている。これにより、幅広ベルト350Rと幅狭ベルト360Rとの間に空間Sが形成される。
【0038】
(立上部)
立上部320Rは、底面コンベア310Rによって位置Pまで搬送される物品群Cを、当該位置Pにおいて起立姿勢にするために設けられている。図3及び図4に示すように、立上部320Rは、上記した搬送ベルト316Rの駆動に伴って回転するプーリ321Rと、プーリ321Rと所定の間隔を隔てて設けられるプーリ322Rと、プーリ321Rに隣接して配置されるプーリ323Rと、プーリ321R及びプーリ322Rに巻き掛けられた駆動ベルト324Rと、プーリ322Rを回転可能に支持する軸受板325Rと、軸受板325Rを上記した搬送ベルト316Rの上方位置で支持する支持板326Rと、支持板326Rを所定の角度で固定する角度調整板327Rとを有している。
【0039】
図3に示すように、プーリ321Rは、搬送ベルト316Rの内側に当接するように設けられ、上記した搬送ベルト316Rの駆動に伴って回転する。また、プーリ323Rは、搬送ベルト316Rの駆動力をプーリ321Rに付与するように、プーリ321Rに隣接して設けられる。これにより、モータ311Rが駆動することによって、搬送ベルト316Rと駆動ベルト324Rとが共に駆動する。すなわち、本実施形態では、搬送ベルト316Rの駆動源と駆動ベルト324Rの駆動源とが共通となっている。従って、搬送ベルト316Rが駆動している間は、駆動ベルト324Rも駆動することになる。なお、プーリ321R及びプーリ323Rは、角度調整板327Rに回転可能に軸支されている。
【0040】
本実施形態の駆動ベルト324Rは、底面コンベア310Rによって搬送される物品群Cの先頭の物品Bに接触するように配置されている。この駆動ベルト324Rは、上記した幅広ベルト350Rと幅狭ベルト360Rとの間に形成される空間Sに配置されている。駆動ベルト324Rは、物品群Cの先頭の物品Bとの間に摩擦力が生じるようにゴム製となっている。さらに、この駆動ベルト324Rの表面には、凹凸形状が形成されている。
【0041】
図4に示すように、軸受板325Rは、搬送ベルト316Rの上方位置において、プーリ322Rを空間Sに対応する位置で回転可能に支持するために設けられている。この軸受板325Rは、ボルト371Rによって支持板326Rに固定されている。そして、支持板326Rは、ボルト372R及び373Rによって所定の角度で角度調整板327Rに固定されている。本実施形態では、角度調整板327Rに所定のピッチで複数の孔328Rが形成されており、当該複数の孔328Rのいずれかにボルト372Rを締結することによって、支持板326Rの搬送面に対する傾斜角度が調整可能となる。なお、本実施形態では、支持板326Rが物品群Cの搬送面に対して傾斜した状態で固設されている。また、本実施形態では、角度調整板327Rは、側板318Rに形成される長孔319Rの長軸方向(搬送方向X及びその反対方向)に沿って移動可能であって、ボルト373Rの締結位置を所望の位置にすることによって、角度調整板327Rの位置が調整可能となる。
【0042】
(開閉機構)
図5に示すように、開閉機構330R及び330Lは、右コンベア300Rと左コンベア300Lとの間に、後述する移送機構400のキャッチャ410を通過させる開口部Tを形成するように、底面コンベア310R及び310Lのそれぞれを回転させる。この開閉機構330Rは、駆動源となるステッピングモータ331Rと、ステッピングモータ331Rの駆動軸に取り付けられる回転シャフト332Rと、回転シャフト332R及び上記した側板318Rを連結する連結部333Rとを有している。本実施形態の開閉機構330Rは、搬送ベルト316Rの搬送面が水平状態から鉛直状態になるように、底面コンベア310Rを下方(R方向)に略90度回転させる。ステッピングモータ331Rは、外壁340Rに取り付けられており、回転シャフト332Rを回転させる。また、回転シャフト332Rは、物品群Cの搬送方向Xに沿って設けられ、外壁340Rに回転可能に軸支される。また、連結部333Rは、回転シャフト332Rと共に回転するように構成されている。なお、ステッピングモータ331Rは、図7に示すように、制御部600からの制御信号(パルス数)に基づいて、その回転数を制御し、右コンベア300Rの回転角度を制御する。
【0043】
(移送機構)
図1に示すように、移送機構400は、立上機構300により起立姿勢となった物品群Cを位置Pからその直下に配置される段ボール箱Aまで移送するために設けられている。この移送機構400は、物品群Cを把持するキャッチャ410と、キャッチャ410を上下方向(Z方向)に昇降させる昇降機構420とを含んでいる。
【0044】
(キャッチャ)
図6に示すように、キャッチャ410は、物品群Cの先頭の物品Bに接触するアーム411と、アーム411を回転させるソレノイド412と、物品群Cの末尾の物品Bに接触するアーム413と、アーム413を回転させるソレノイド414と、物品群Cを吸引する吸着部415とを有している。なお、ソレノイド412及び414は、図7に示すように、制御部600からの制御信号に基づいて、そのストローク量を調整してアーム411及び413のそれぞれを開閉させる。本実施形態では、物品群Cが起立状態になったタイミングで、アーム411及び413を内側に回転させる。また、吸着部415は、吸引口416Aを介して空気を吸い込むブロワ416と、当該ブロワ416に接続される配管417とを有している。なお、ブロワ416は、制御部600からの制御信号に基づいて、所定のタイミングで物品群Cを吸引する。このブロワ416は、その吸引口416Aからアーム411及びアーム413に当接しない物品B(物品群Cの先頭B及び末尾の物品B以外の物品B)を吸引して、物品群Cを把持した際に、当該物品Bが落下しないようにしている。本実施形態では、図7に示すように、ブロワ416による物品Bの吸着圧力を検出する真空センサ418と、位置Pの搬送方向Xの上流側に配置される物品検知センサ419とが、制御部600に通信可能に接続されている。ここで、本実施形態では、制御部600は、所定時間の間、物品検知センサ419によって物品Bが検知されない場合に、ブロワ416を停止又は低速運転する。すなわち、物品群Cがアーム411及び413に把持されて移送されるときだけ、ブロワ416の通常運転が行われる。
【0045】
(昇降機構)
昇降機構420は、キャッチャ410に把持された物品群Cを段ボール箱Aに収容するために、当該キャッチャ410を直下に移送する。なお、この昇降機構420は、図7に示すように、制御部600からの制御信号に基づいて、キャッチャ410の昇降移動を制御する。
【0046】
(箱詰装置の動作)
次に、図5及び図8〜図14を参照して、箱詰装置100が物品群Cを段ボール箱Aに箱詰する動作について説明を行う。
【0047】
図8に示すように、搬送機構200により隣接する物品Bの一部分が重なり合った物品群Cが底面コンベア310Rに移動されると、底面コンベア310Rの搬送ベルト316R上で物品群Cが搬送方向Xに沿って移動される。そして、搬送方向Xに沿って移動される物品群Cは、図9に示すように、その先頭の物品Bが駆動ベルト324Rに接触するまで搬送される。本実施形態では、搬送ベルト316Rと駆動ベルト324Rとが連動しているので、図10に示すように、物品群Cは搬送方向Xに搬送されつつ、その先頭の物品Bは、駆動ベルト324Rの駆動に伴って、その先端が持ち上げられる。その後、図11に示すように、先頭の物品Bの立ち上がりに伴って隣接する物品Bが立ち上がり、物品群Cを構成する複数の物品Bが先頭から順次立ち上がる。
【0048】
そして、図12に示すように、物品群Cを構成する物品Bの全てが起立姿勢になると、搬送ベルト316R及び駆動ベルト324Rの駆動が停止される。次に、アーム411が内側(矢印F方向)に回転すると共に、アーム413が内側(矢印−F方向)に回転して、図14に示すように、当該起立姿勢の物品群Cが把持される。これにより、物品群Cが整列圧縮されて、当該物品群Cの嵩が抑えられる。この際、物品群Cが移送中に落下しないように、ブロワ416の吸引口416Aから物品群Cが吸引される。特に、本実施形態では、アーム411及びアーム413が直接接触しない物品Bをブロワ416が吸引することによって、当該物品Bが移送中に落下するのを防止する。
【0049】
そして、本実施形態では、図5に示すように、底面コンベア310R及び310Lがそれぞれ反対方向(矢印R方向、矢印−R方向)に回転することによって、開口部Tを形成する。これにより、図14に示すように、キャッチャ410により把持された物品群Cは、当該開口部Tを介して、底面コンベア310R及び310Lの直下に配置される段ボール箱Aに移送される。具体的には、物品群Cを把持したキャッチャ410が昇降機構420により矢印Z方向に降下されることによって、物品群Cが段ボール箱Aまで搬送される。次に、アーム411及びアーム413がそれぞれ外側に回転して、物品群Cの把持が解除される。このようにして、段ボール箱Aに起立姿勢の物品群Cが収容される。
【0050】
なお、ブロワ416の運転は、アーム411及びアーム413によって物品群Cが把持される直前または物品群Cが把持された直後から、当該物品群Cが段ボール箱Aに収容されて物品群Cの把持が解除されるまでの期間である。この際、制御部600は、真空センサ418によって取得される吸着圧力に基づいて、必要な吸引力を制御することができる。すなわち、本実施形態では、物品Bの包材の形状及び材質、物品Bの重量、並びに、物品群Cを構成する物品Bの個数等に応じて、必要な吸引力を選択することができる。
【0051】
(立上部の角度調整)
次に、図15を参照して、立上部320Rの角度調整の方法について説明する。本実施形態では、物品群Cの搬送面に対して立上部320Rの角度調整を行うことによって、物品群Cの起立姿勢を調整することができる。
【0052】
立上部320Rの角度調整は、角度調整板327Rに固定される支持板326Rの角度を調整することによって行う。ここでは、搬送面に対して略垂直に配置される立上部320R(図15(a)参照)を、搬送方向X側に傾倒する例(図15(b)参照)について説明する。
【0053】
まず、図15(a)に示すように、角度調整板327Rの最も上方位置に形成される孔328Rに締め付けられるボルト372Rを外し、支持板326Rと角度調整板327Rとの固定を解除する。そして、支持板326Rを、ボルト373Rを中心として、搬送方向X側に傾倒させて、支持板326Rの角度調整を行う。ここで、図15(b)に示すように、角度調整した支持板326Rに対応する角度調整板327Rの孔328Rにボルト372Rを締め付ける。以上のようにして、立上部320Rの角度調整が行われる。
【0054】
(立上部の位置調整)
次に、図16を参照して、立上部320Rの搬送方向Xに沿った位置調整の方法について説明する。本実施形態では、立上部320Rの固設位置の位置調整を行うことによって、物品群Cを構成する物品Bの個数や物品Bの大きさが変化する場合等、任意の位置Pで物品群Cを起立姿勢にすることができる。
【0055】
立上部320Rの固設位置の位置調整は、角度調整板327Rを搬送方向X及びその反対方向に移動させることによって行う。具体的には、側板318Rに形成される長孔319Rに沿って角度調整板327Rを移動させることによって、立上部320Rの固設位置を調整する。ここでは、図16(a)及び(b)に示すように、搬送機構200側に配置される立上部320Rを搬送方向Xに移動させる例について説明する。
【0056】
図16(a)に示すように、搬送機構200側に配置される立上部320Rにおいて、まず、角度調整板327Rを側板318Rに固定するボルト373Rを緩める。これにより、角度調整板327Rと側板318Rとの固定が解除されて、角度調整板327Rが長孔319Rに沿って移動可能となる。ここで、角度調整板327Rを搬送方向Xに沿って移動させて、任意の位置に配置する。そこで、ボルト373Rを締め付けることによって、角度調整板327Rが側板318Rに固定されて、立上部320Rの位置調整が行われる。
【0057】
(本実施形態における効果)
以上のように、本実施形態に係る箱詰装置100においては、位置Pにおいて物品群Cを起立姿勢にする立上部320R及び320Lと、該起立姿勢となった物品群Cを位置Pから物品群Cが収容される段ボール箱Aまで移送する移送機構400とを設けることによって、立上部320R及び320Lによって物品群Cを起立姿勢にした後、移送機構400によって当該起立姿勢となった物品群Cを段ボール箱Aに移送することができるので、起立姿勢の物品群Cの箱詰が可能となる。
【0058】
また、物品群Cを起立姿勢のまま各所に搬送する場合、その搬送に伴い物品群Cの起立姿勢に乱れが生じるが、本実施形態では、段ボール箱Aに収容される直前の位置Pで物品群Cが起立姿勢にされるので、起立姿勢の物品群Cを安定して箱詰することができる。
【0059】
また、本実施形態では、立上部320R及び320Lによって、物品群Cを一括して起立状態にすることができるので、物品Bを個別に起立状態にする場合と比べて、箱詰作業のスピードアップを図ることができる。
【0060】
また、本実施形態では、駆動ベルト324R及び324Lをゴム製にすることによって、駆動ベルト324R及び324Lと、物品Bとの間に発生する摩擦力により、物品群Cを確実に起立姿勢にすることができる。
【0061】
また、本実施形態では、駆動ベルト324R及び324Lの表面に凹凸形状を形成することによって、物品Bが駆動ベルト324R及び324Lの表面上を滑るのを抑止し、物品群Cを確実に起立姿勢にすることができる。
【0062】
また、本実施形態では、隣接する物品Bの一部分が重なり合った物品群Cの先頭にある物品Bを駆動ベルト324R及び324Lにより起立姿勢にすることにより、容易に物品群C全体を起立姿勢にすることができる。
【0063】
また、本実施形態では、底面コンベア310R及び310Lの駆動源と、駆動ベルト324R及び324Lの駆動源とを共通にすることによって、底面コンベア310R及び310Lにより物品群Cが位置Pに搬送されると同時に、駆動ベルト324R及び324Lにより当該物品群Cを起立姿勢にすることができる。その結果、箱詰め作業のスピードアップを図ることができる。また、本実施形態では、上記した駆動源の共通化により、箱詰装置100の小型化およびコストダウンを図ることができる。
【0064】
また、本実施形態では、搬送ベルト316R及び316Lと、駆動ベルト324R及び324Lとの連動によって、物品群Cが立ち上がる同時に整列圧縮して、嵩が抑えられる。その結果、容積に制限がある段ボール箱Aに多数の物品Bを収容することが可能となる。
【0065】
また、本実施形態では、立上部320R及び320Lが搬送面に対して傾斜した状態で固設されることによって、底面コンベア310R及び310Lによって搬送される物品群Cが傾斜した駆動ベルト324R及び324Lに沿って移動することによって物品群Cが起立姿勢になる。
【0066】
また、本実施形態では、立上部320R及び320Lの搬送面に対する傾斜角度を調整可能にすることによって、物品群Cの起立姿勢の角度を調整することができる。これにより、搬送面に対して垂直方向に起立した物品群Cだけでなく、搬送面に対して所定角度方向に起立した物品群Cも段ボール箱Aに収容することが可能となる。
【0067】
また、本実施形態では、立上部320R及び320Lを搬送方向Xに沿って移動可能にすることによって、物品群Cの大きさが変化(物品群Cを構成する物品Bの個数の変化、物品群Cを構成する物品Bの大きさの変化)したり、段ボール箱Aの大きさが変化したりする場合でも、立上部320R及び320Lの位置調整をすることで、それらの変化に対応して箱詰を行うことができる。その結果、汎用性の高い箱詰装置100を得ることができる。
【0068】
また、本実施形態では、一対の底面コンベア310R及び310Lの各々に立上部320R及び320Lを設けることによって、その一対の立上部320R及び320Lによって確実に物品群Cを起立姿勢にすることができる。これにより、物品群Cの起立姿勢に乱れが生じるのを防止することができる。
【0069】
また、本実施形態では、一対の底面コンベア310R及び310Lが、それらの間にキャッチャ410を通過させる開口部Tを形成するように回動可能に構成され、且つ、キャッチャ410が、開口部Tを介して一対の底面コンベア310R及び310Lの直下に配置される段ボール箱Aに物品群Cを移送することによって、物品群Cの箱詰作業を底面コンベア310R及び310Lの直下で行うことができるので、箱詰装置100による作業スペースの省スペース化を図ることができる。
【0070】
また、本実施形態では、物品検知センサ419により物品Bが検知されて、物品群Cがキャッチャ410に把持されて移送されるときだけ、ブロワ416が通常運転を行うので、ブロワ416の運転に係る騒音を抑制することができると共に、ブロワ416の消費電力が大きくなるのを抑制することができる。その結果、CO2の発生の抑制と共に工場環境の改善にもつながる。
【0071】
また、本実施形態では、真空センサ418によりブロワ416による物品Bの吸着圧力を検出することによって、当該圧力が、物品Bの包材の形状及び材質、物品Bの重量、並びに、物品群Cを構成する物品Bの個数等に応じた適正範囲か否かを確認することができる。したがって、ブロワ416による吸引圧力が過大である場合には、ブロワ416の運転周波数を下げて低速運転を行うことにより、不要な電力消費を削減することができる。
【0072】
<請求項の各構成要素と上記実施形態の各部との対応関係>
上記実施形態においては、箱詰装置100が「箱詰装置」に相当し、物品Bが「物品」に相当し、物品群Cが「物品群」に相当し、位置Pが「所定位置」に相当し、底面コンベア310R及び310Lが「搬送手段」及び「底面コンベア」に相当し、立上部320R及び320Lが「立上手段」に相当し、段ボール箱Aが「箱」に相当し、移送機構400が「移送手段」に相当し、駆動ベルト324R及び324Lが「駆動ベルト」に相当し、開口部Tが「開口部」に相当し、物品検知センサ419が「物品検知センサ」に相当し、吸着部415が「吸着部」に相当する。
【0073】
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、これらの実施形態に限定されるものでないと考えられるべきである。本発明の範囲は、上記した実施形態の説明だけではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれる。
【0074】
<第1変形例>
例えば、上記実施形態では、一対の底面コンベア310R及び310Lを設ける例について説明したが、本発明はこれに限らず、図17に示した片開きの底面コンベア310aを採用しても良い。すなわち、第1変形例に係る立上機構300aは、1つの底面コンベア310aと、底面コンベア310aの搬送コンベア316a上を搬送される物品群を起立姿勢にする立上部320aと、底面コンベア310a及び立上部320aを下方(矢印R方向)に回転させる開閉機構330aとを備えている。底面コンベア310aは、開閉機構330aの回転シャフト332aに回転可能に取り付けられており、当該回転シャフト332aが駆動源であるモータ331aの駆動に伴って回転したときに、キャッチャ410(図1参照)を通過させる開口部Taを形成する。
【0075】
上記構成によれば、一対の右コンベア300Rと左コンベア300Lを有する実施形態に係る立上機構300と異なり、立上機構300aの構成が複雑になるのを防止することができると共に、コストダウンを図ることができる。
【0076】
<第2変形例>
また、上記実施形態では、駆動ベルト324R及び324Lを有する立上部320R及び320Lについて説明したが、本発明はこれに限らず、図18に示した第2変形例に係る立上部320bであっても良い。すなわち、第2変形例に係る立上部320bは、回転可能に軸支される複数のローラ324bが傾斜して並んで配置されている。このローラ324bは、駆動ローラであっても従動ローラであっても良い。
【符号の説明】
【0077】
100 箱詰装置
310R,310L,310a 底面コンベア
320R,320L,320a,320b 立上部
324R,324L 駆動ベルト
400 移送機構
415 吸着部
419 物品検知センサ
A 段ボール箱
B 物品
C 物品群
P 位置
【特許請求の範囲】
【請求項1】
包材からなる物品が隣接する前記物品と一部分が重なり合った状態で載置された物品群を所定位置まで搬送する搬送手段と、
前記所定位置において前記物品群を起立姿勢にする立上手段と、
該起立姿勢となった前記物品群を前記所定位置から前記物品群が収容される箱まで移送する移送手段とを備えることを特徴とする箱詰装置。
【請求項2】
前記立上手段は、前記物品群の先頭の物品に接触する駆動ベルトを含むことを特徴とする請求項1に記載の箱詰装置。
【請求項3】
前記搬送手段の駆動源と前記駆動ベルトの駆動源とが共通であることを特徴とする請求項2に記載の箱詰装置。
【請求項4】
前記駆動ベルトの表面は、凹凸形状であることを特徴とする請求項2または3に記載の箱詰装置。
【請求項5】
前記立上手段は、前記物品群の搬送面に対して傾斜した状態で固設されていることを特徴とする請求項1〜4のいずれか1項に記載の箱詰装置。
【請求項6】
前記立上手段の前記搬送面に対する傾斜角度を調整可能にしたことを特徴とする請求項5に記載の箱詰装置。
【請求項7】
前記立上手段を前記物品群の搬送方向に沿って移動可能にしたことを特徴とする請求項1〜6のいずれか1項に記載の箱詰装置。
【請求項8】
前記搬送手段は、並設された一対の底面コンベアを含み、
前記立上手段は、前記一対の底面コンベアのそれぞれに設けられることを特徴とする請求項1〜7のいずれか1項に記載の箱詰装置。
【請求項9】
前記一対の底面コンベアの各々は、それらの間に前記移送手段を通過させる開口部を形成するように回動可能に構成され、
前記移送手段は、前記開口部を介して前記一対の底面コンベアの直下に配置される前記箱に前記物品群を移送することを特徴とする請求項8に記載の箱詰装置。
【請求項10】
前記所定位置より前記物品群の搬送方向の上流側に配置される物品検知センサと、
前記移送手段に設けられ、前記物品群の一部を吸着する吸着部とをさらに備え、
前記物品検知センサによって、所定時間の間、前記物品が検知されない場合に、前記吸着部が停止又は低速運転することを特徴とする、請求項1〜9のいずれか1項に記載の箱詰装置。
【請求項1】
包材からなる物品が隣接する前記物品と一部分が重なり合った状態で載置された物品群を所定位置まで搬送する搬送手段と、
前記所定位置において前記物品群を起立姿勢にする立上手段と、
該起立姿勢となった前記物品群を前記所定位置から前記物品群が収容される箱まで移送する移送手段とを備えることを特徴とする箱詰装置。
【請求項2】
前記立上手段は、前記物品群の先頭の物品に接触する駆動ベルトを含むことを特徴とする請求項1に記載の箱詰装置。
【請求項3】
前記搬送手段の駆動源と前記駆動ベルトの駆動源とが共通であることを特徴とする請求項2に記載の箱詰装置。
【請求項4】
前記駆動ベルトの表面は、凹凸形状であることを特徴とする請求項2または3に記載の箱詰装置。
【請求項5】
前記立上手段は、前記物品群の搬送面に対して傾斜した状態で固設されていることを特徴とする請求項1〜4のいずれか1項に記載の箱詰装置。
【請求項6】
前記立上手段の前記搬送面に対する傾斜角度を調整可能にしたことを特徴とする請求項5に記載の箱詰装置。
【請求項7】
前記立上手段を前記物品群の搬送方向に沿って移動可能にしたことを特徴とする請求項1〜6のいずれか1項に記載の箱詰装置。
【請求項8】
前記搬送手段は、並設された一対の底面コンベアを含み、
前記立上手段は、前記一対の底面コンベアのそれぞれに設けられることを特徴とする請求項1〜7のいずれか1項に記載の箱詰装置。
【請求項9】
前記一対の底面コンベアの各々は、それらの間に前記移送手段を通過させる開口部を形成するように回動可能に構成され、
前記移送手段は、前記開口部を介して前記一対の底面コンベアの直下に配置される前記箱に前記物品群を移送することを特徴とする請求項8に記載の箱詰装置。
【請求項10】
前記所定位置より前記物品群の搬送方向の上流側に配置される物品検知センサと、
前記移送手段に設けられ、前記物品群の一部を吸着する吸着部とをさらに備え、
前記物品検知センサによって、所定時間の間、前記物品が検知されない場合に、前記吸着部が停止又は低速運転することを特徴とする、請求項1〜9のいずれか1項に記載の箱詰装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−246156(P2011−246156A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−120284(P2010−120284)
【出願日】平成22年5月26日(2010.5.26)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月26日(2010.5.26)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]