
簡易型振子式摩擦係数測定器
【課題】路面の摩擦係数を簡単な作業で測定する。
【解決手段】簡易型振子式摩擦係数測定器10は、基礎11と、基礎11から上方に延びる支柱12と、支柱12に対して水平なX軸回りに揺動自在に設けられ、X軸回りに回転するローラXA1に向けて揺動するように落下させることでローラXA1の上方を通過してから振り上がる振子14と、振子14の先端に設けられ、振子14がローラXA1の上方を通過する際に振子14と共にローラXA1の上方を通過してローラXA1の周面に擦れる接触子15と、基準となる位置から落下させた振子14が、反対側に最も振り上がった時点の振子14の揺動角度を検出するロータリーエンコーダー18と、を備える。
【解決手段】簡易型振子式摩擦係数測定器10は、基礎11と、基礎11から上方に延びる支柱12と、支柱12に対して水平なX軸回りに揺動自在に設けられ、X軸回りに回転するローラXA1に向けて揺動するように落下させることでローラXA1の上方を通過してから振り上がる振子14と、振子14の先端に設けられ、振子14がローラXA1の上方を通過する際に振子14と共にローラXA1の上方を通過してローラXA1の周面に擦れる接触子15と、基準となる位置から落下させた振子14が、反対側に最も振り上がった時点の振子14の揺動角度を検出するロータリーエンコーダー18と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、接触子を用いて路面の摩擦係数を測定する簡易型振子式摩擦係数測定器に関する。
【背景技術】
【0002】
自動車などの車両が保安基準に適合しているか否かを検査する自動車検査登録制度がある。この自動車検査登録制度下で行われる車検では、ブレーキテスタを用いてタイヤの制動力を試験する。ブレーキテスタは、タイヤを載せる複数のローラを備えている。複数のローラは、鋼製で、その周面には長手方向に沿った溝が形成されている。これら複数のローラは、回転軸が平行となるように対にして並べて配置されている。このようなブレーキテスタでは、対となるローラ同士の間にタイヤを載せた状態で試験が行われる(例えば、特許文献1参照)。この試験では、ブレーキ時にローラに掛かる回転方向の力をタイヤの制動力として測定し、その制動力の車両重量との割合によって合否が決まる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−163834号公報(段落[0003]〜[0005]および図1参照)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ブレーキテスタのローラは、タイヤとの摩擦によって徐々に摩耗する。結果、タイヤとの間の摩擦係数が低下する。本発明者らによる調査結果によれば、調査用に用意した劣化していない基準となるタイヤとの間の摩擦係数は、未使用のローラの場合、0.7〜0.8程度であるのに対し、13年間使用されて1mm程度摩耗しているローラの場合、0.5以下であることが分かっている。測定されるタイヤの制動力は、タイヤに掛かる接地重量に、ローラとタイヤとの間の摩擦係数を乗じたものであるので、その測定値は、ローラの状態に大きく影響を受ける。このため、ローラの状態を一定に保つことが望まれる。
【0005】
しかしながら、従来の車検では、ローラが摩耗している場合であっても、そのことに気付かずに、または、そのことを気にせずに、タイヤの制動力の試験が行われている。このため、想定している制動力とは異なる制動力が測定されており、適切に合否を決めることができていない。そこで、本発明者らは、ローラが摩耗してタイヤの制動力を測定することに影響がある場合に、そのローラを交換するよう提言する予定である。そのためにも、ローラを交換する基準を摩擦係数によって定量的に設定した上で、ローラの摩擦係数を簡単に測定できる摩擦係数測定器を用意しなければならない。このような摩擦係数測定器は、ローラに限定されず、その他の路面の摩擦係数を測定することができれば、使い勝手がよい。
【0006】
本発明は、上記課題を鑑みてなされたものであり、路面の摩擦係数を簡単な作業で測定できる簡易型振子式摩擦係数測定器を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明は、路面の摩擦係数を測定する簡易型振子式摩擦係数測定器であって、基礎と、前記基礎から上方に延びる支柱と、前記支柱に対して前記X軸回りに揺動自在に取り付けられ、前記路面に向けて揺動するように落下させることで前記路面の上方を通過してから振り上がる振子と、前記振子の先端に設けられ、該振子が前記路面の上方を通過する際に該振子と共に前記路面の上方を通過して該路面に擦れる接触子と、基準となる高さから落下させた前記振子が、反対側に最も振り上がった時点の該振子の揺動角度を検出する揺動角度検出手段と、を備え、前記振子は、伸縮自在なアームと、前記アームの先端に設けられた錘と、前記錘よりも基端側に設けられ前記アームが縮む際に該アームに復元力を与える弾性部材と、を備えることを特徴とする、簡易型振子式摩擦係数測定器である。
【0008】
(2)本発明はまた、送りネジを有してなり、該送りネジの回転によって前記振子を昇降させる昇降機構を備えることを特徴とする、上記(1)に記載の簡易型振子式摩擦係数測定器である。(3)本発明はまた、前記接触子は、前記路面の上方を通過する際に下方に向けて凸となる曲面を有してなり、該曲面が前記路面の上方を通過する際に該路面に擦れることを特徴とする、上記(1)または(2)に記載の簡易型振子式摩擦係数測定器である。(4)本発明はまた、前記接触子を前記錘に対して変位不能に締結する締結部材を備え、前記接触子は、前記曲面として前記X軸回りの円柱周面を有してなり、前記締結部材による締結を緩めることで前記X軸回りに回転して、前記路面の上方を通過する際に該路面に擦れる部分が可変であることを特徴とする、上記(3)に記載の簡易型振子式摩擦係数測定器である。(5)本発明はまた、前記路面が磁石との間に引力を生じるものの場合に用いる簡易型振子式摩擦係数測定器であって、前記基礎は、前記路面に設置される設置部と、前記設置部と一体に設けられ該設置部を前記路面に固定する固定手段と、を備え、前記固定手段は、磁石を有してなり、該磁石の前記路面との間に生じる引力によって前記設置部を前記路面に固定することを特徴とする、上記(1)〜(4)のいずれかに記載の簡易型振子式摩擦係数測定器である。(6)本発明はまた、前記揺動角度検出手段で検出された前記揺動角度を前記路面の摩擦係数に換算する換算手段と、前記換算手段で換算された前記路面の摩擦係数を出力する摩擦係数出力手段と、を備え、前記揺動角度検出手段は、前記揺動角度に対応するデジタル信号を出力する角度センサであり、前記換算手段は、前記角度センサから出力された前記デジタル信号を利用して前記路面の摩擦係数を演算する演算手段であることを特徴とする、上記(1)〜(5)のいずれかに記載の簡易型振子式摩擦係数測定器である。
【発明の効果】
【0009】
本発明の上記(1)〜(6)に記載の簡易型振子式摩擦係数測定器によれば、路面の摩擦係数を簡単な作業で測定できるという優れた効果を奏し得る。
【図面の簡単な説明】
【0010】
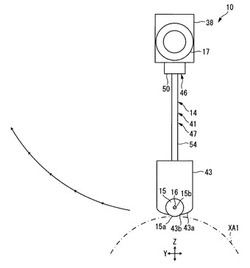
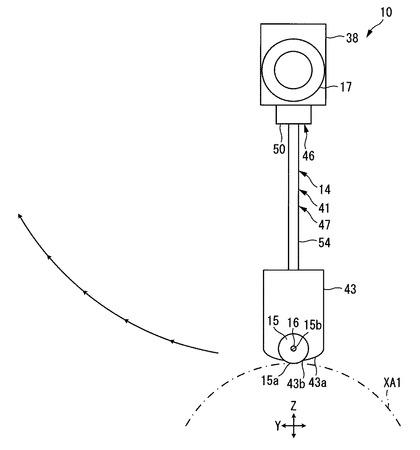
【図1】本発明に係る簡易型振子式摩擦係数測定器の正面図である。
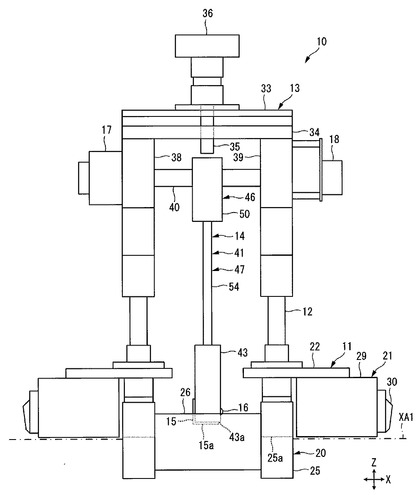
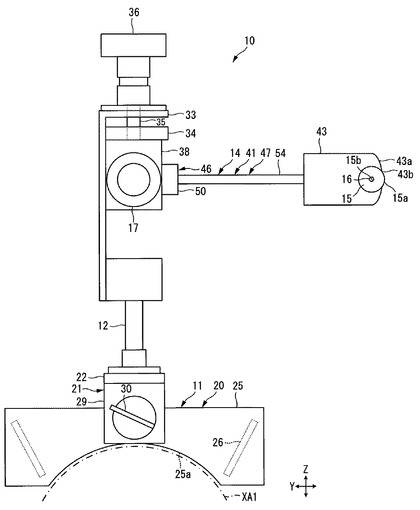
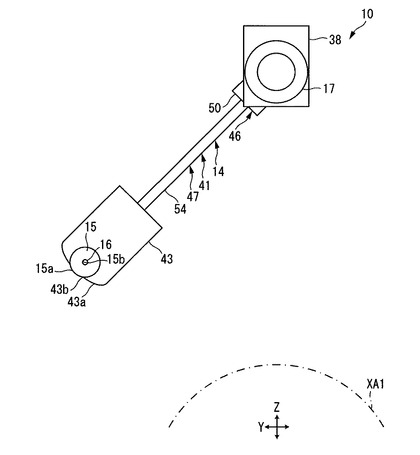
【図2】簡易型振子式摩擦係数測定器の側面図である。
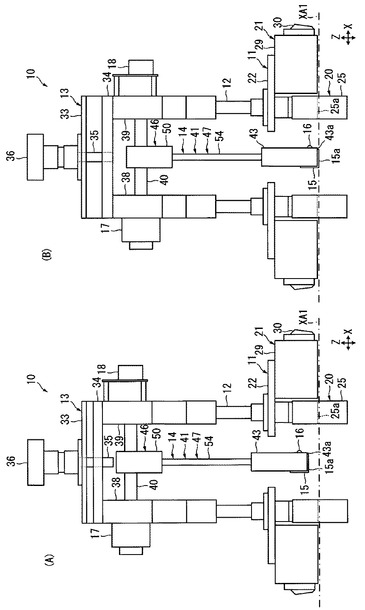
【図3】昇降機構を説明する図であり、(A)は振子をローラから離間させた状態を、(B)は振子をローラに突き当てた状態を、それぞれ示す。
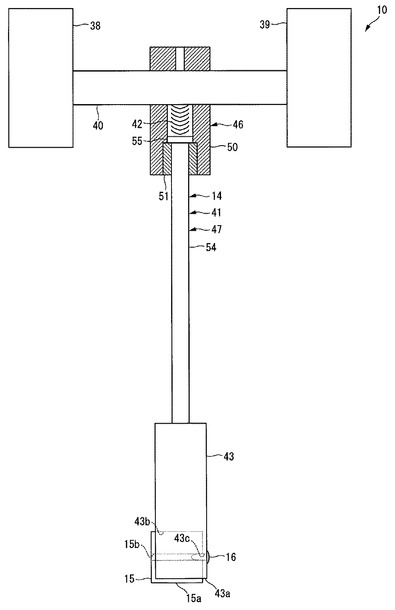
【図4】振子の一部断面正面図である。
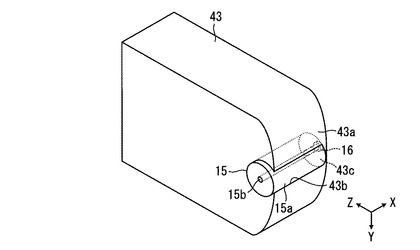
【図5】錘を示す外観斜視図である。
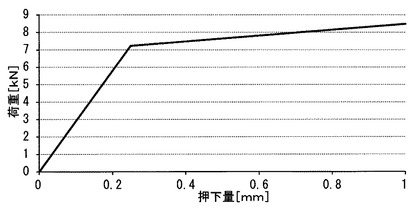
【図6】接触子のローラに突き当てた状態からの押下量と、ローラに掛かる垂直荷重との関係を示す図である。
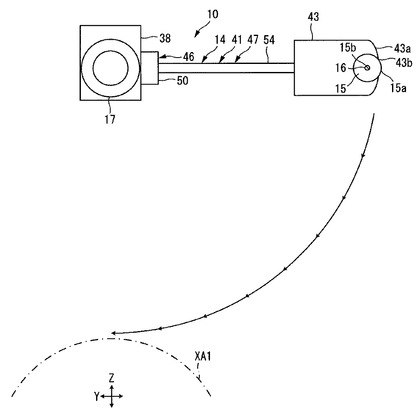
【図7A】簡易型振子式摩擦係数測定器の使用状態を示す図であり、振子を基準となる高さまで持ち上げた状態を示す。
【図7B】Aの状態から落下させた振子がローラの上方を通過している状態を示す。
【図7C】Bの状態の後に振子が最も振り上がった状態を示す。
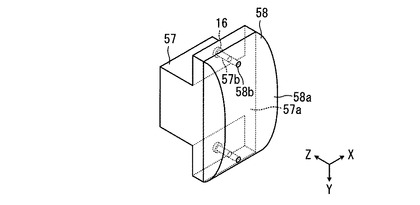
【図8】錘の変形例を示す外観斜視図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら本発明の実施形態の例について詳細に説明する。なお、以下の説明では、図に示したX軸、Y軸およびZ軸を基準として方向を説明する。X軸およびY軸は互いに直角な水平軸であり、Z軸はX軸およびY軸に直角な鉛直軸である。各図において、一部の構成を適宜省略して、図面を簡略化する。
【0012】
図1および図2に示す簡易型振子式摩擦係数測定器10は、制動力を試験するブレーキテスタ(図示省略)が備えるローラXA1について、接触子15を用いて摩擦係数を測定するものである。具体的に、簡易型振子式摩擦係数測定器10は、振子14を基準となる高さから落下させて、振子14の先端に設けられた接触子15をローラXA1に擦らせ、その後の振子14の振り上がる量でローラXA1の摩擦係数を測定する。振子14の基準となる高さには、鉛直方向からの角度が90°となる高さを採用する。ブレーキテスタは、自動車検査登録制度下で行われる車検などに用いられる。ローラXA1は、鋼製で、その周面には長手方向に沿った溝(図示省略)が形成されている。このローラXA1は、ブレーキテスタから取り外されて所定の台(図示省略)に移動され、試験が行われる。本明細書では、ブレーキテスタは、長手方向がX軸方向に沿うように配置されるものとして説明する。なお、簡易型振子式摩擦係数測定器10は、ローラXA1に限定されず、その他の路面について摩擦係数を測定することも可能である。すなわち、本明細書では、ローラXA1を路面に含む概念とする。
【0013】
具体的に、簡易型振子式摩擦係数測定器10は、基礎11と、この基礎11から上方に延びる支柱12と、この支柱12の上方に設けられた昇降機構13と、この昇降機構13を介して支柱12に設けられた振子14と、この振子14の先端に設けられた接触子15と、この接触子15を振子14に締結する締結部材として機能する締結ネジ16と、振子14を基準となる高さなどで停止させるマイクロブレーキ17と、振子14の揺動角度を検出する揺動角度検出手段として機能するロータリーエンコーダー18と、測定器全体を統括的に制御するコントローラ(図示省略)と、を備えている。
【0014】
基礎11は、ローラXA1の周面に設置される設置部20と、この設置部20をローラXA1の周面に固定する固定手段となる一対の保持具21と、これら一対の保持具21を設置部20に連結する一対の連結プレート22と、を備えている。設置部20は、一対の台座25と、これら一対の台座25を互いに連結する一対の連結ステー26と、を備えている。一対の台座25は、それぞれ、直方体形状のブロックを元として構成される。具体的に、一対の台座25は、それぞれ、その底面における長手方向の中間部分が、ローラXA1の周面に嵌まるように当該ローラXA1の曲率に対応して円弧状に切り抜かれた形状を呈する。この円弧状に切り抜かれた部分がローラXA1の周面に設置される設置面25aとなる。これら一対の台座25は、互いにX軸方向に所定の間隔をおいて、長手方向がY軸方向に沿うように配置される。一対の連結ステー26は、それぞれ、長手方向がX軸方向に沿うように、一対の台座25の間に配置される。これら一対の連結ステー26は、それぞれ、その両端が一対の台座25にボルトなどによって固定される。一対の保持具21は、一対の連結プレート22によって設置部20と一体に設けられている。これら一対の保持具21は、磁石(図示省略)を有してなり、その磁石のローラXA1との間に生じる磁力(引力)によって設置部20をローラXA1の周面に固定する。具体的に、保持具21は、筐体29と、この筐体29内に収容された磁力発生機構(図示省略)と、筐体29の側面に設けられたレバー30と、を備えている。この磁力発生機構は、磁石によって、筐体29の底面に磁力を発生させるオン状態と、筐体29の底面に磁力を発生させないオフ状態と、を切り替える。レバー30は、磁力発生機構によるオン状態とオフ状態との切替えを手動で行わせる。このような保持具21には、例えば、カネテック株式会社(長野県上田市)が市販するMB−P形マグネットホルダ台(商品名)を採用できる。
【0015】
昇降機構13は、支柱12の上端から水平に延びる不動プレート33と、この不動プレート33の下方において昇降する昇降プレート34と、これら不動プレート33および昇降プレート34に貫通するように鉛直方向に延びる送りネジ35と、この送りネジ35の上端に固定されて不動プレート33の上面に配置された微動ノブ36と、を備えている。この昇降機構13は、周知の送りネジを採用するもので、不動プレート33を基準として、送りネジ35の回転によって昇降プレート34が昇降する。昇降プレート34は、10mmの範囲で昇降する。具体的に、昇降プレート34は、微動ノブ36を右に回転させた場合に上昇し、左に回転させた場合に下降する。また、昇降プレート34は、微動ノブ36を1回転させる毎に0.5mm昇降または下降する。これによって、図3(A)および図3(B)に示すように、振子14をローラXA1に離間させたり、振子14をローラXA1に突き当てて当該ローラXA1に垂直荷重を掛けたりできる。
【0016】
図4に示す振子14は、平衡精度が0.1%以下となるようにX軸回りに揺動自在に設けられ、ローラXA1に向けて揺動するように落下させることで当該ローラXA1の上方を通過してから振り上がる(図7A、図7Bおよび図7C参照)。具体的に、振子14は、昇降プレート34の下部に設けられた一対の軸受38,39と、これら一対の軸受38,39に支持されたX軸方向に延びる回転軸40と、この回転軸40に垂直に固定された伸縮自在なアーム41と、このアーム41の先端に設けられた錘43と、この錘43よりも基端側に設けられアーム41が縮む際に当該アーム41に復元力を与える弾性部材として機能するコイルスプリング42と、を備えている。アーム41は、基端から順に、回転軸40が貫通する基端部46と、この基端部46内に押し込まれるアーム本体47と、を備えている。基端部46は、回転軸40に直交する円筒形状を呈する基端部本体50と、この基端部本体50の先端に嵌め込まれてアーム本体47の脱落を防止するリング状のキャップ51と、を備えている。アーム本体47は、キャップ51に貫通する丸棒54と、この丸棒54の基端に設けられてキャップ51に引っ掛かるフランジ55と、を備えている。基端部本体50内には、回転軸40とフランジ55との間にコイルスプリング42が介在している。コイルスプリング42は、アーム本体47が基端部46内に押し込まれて縮められると、復元する方向に力を生じる。その復元力は、フックの法則に表れるように、コイルスプリング42の縮められた量に比例する。図5に示すように、錘43は、略直方体形状であって、その先端には、凸となる曲面43aが形成されている。そして、曲面43aの中央には、X軸方向の一端から他端の手前までに亘って、接触子15が嵌り込む溝43bが形成されていると共に、X軸方向の他端には、溝43bに繋がるネジ孔43cが形成されている。
【0017】
接触子15は、X軸方向に延びる円柱形状を呈し、X軸回りの円柱周面15aを有する。この接触子15は、錘43の溝43bに対し、X軸回りに回転自在に嵌まり込む。また、接触子15は、X軸方向に貫通するネジ孔15bを有する。ネジ孔15bは、接触子15が錘43の溝43bに嵌まり込んだ際にネジ孔43cに連続する。締結ネジ16は、錘43のネジ孔43c、接触子15のネジ孔15b、の順にねじ込まれ、接触子15を錘43に対して変位不能に固定する。接触子15は、振子14がローラXA1の上方を通過する際に当該振子14と共にローラXA1の上方を通過して当該ローラXA1の周面に擦れる。接触子15の円柱周面15aは、ローラXA1の上方を通過する際に下方に向けて凸となる曲面として機能する。締結ネジ16によって固定されている接触子15は、締結ネジ16による締結を緩めることでX軸回りに回転して、ローラXA1の上方を通過する際に当該ローラXA1に擦れる部分が可変である。例えば、20回測定する毎に、接触子15を30°回転させることで、一つの接触子15で240回測定できる。
【0018】
図1および図2に戻って説明する。マイクロブレーキ17は、一方の軸受38の側方に設けられる。このマイクロブレーキ17は、所定のタイミングに回転軸40の回転にブレーキを掛ける。具体的に、マイクロブレーキ17は、振子14が基準となる高さまで持ち上げられた際に、回転軸40の回転にブレーキを掛ける。また、マイクロブレーキ17は、落下させた振子14が最も振り上がる際に、回転軸40の回転にブレーキを掛ける。このようなマイクロブレーキ17には、例えば、小倉クラッチ株式会社(群馬県桐生市)が市販するAMB型マイクロ電磁ブレーキ(商品名)を採用できる。ロータリーエンコーダー18は、他方の軸受39の側方に設けられる。このロータリーエンコーダー18は、振子14が基準となる高さまで持ち上げられる状態を基準(0°)として、回転軸40の回転角度を検出し、検出した角度に対応するデジタル信号を出力する。すなわち、ロータリーエンコーダー18は、振子14の揺動角度に対応するデジタル信号を出力する。
【0019】
コントローラ(図示省略)は、CPU(図示省略)と、テンキー(図示省略)と、ディスプレイ(図示省略)と、パソコンなどにデータを出力するインターフェイス(図示省略)と、を備えている。CPUは、いわゆる中央演算処理装置であり、作業領域として使用されるRAM(図示省略)と、演算に用いるプログラムなどを記憶するROM(図示省略)と、を備えている。このCPUは、ロータリーエンコーダー18から出力されたデジタル信号を、ローラXA1の摩擦係数に換算する換算手段として機能する。テンキーは、演算係数を入力する際に用いられる。また、テンキーは、測定を開始する際に、振子14を落下させるスタートキーとして用いられる。ディスプレイは、CPUで換算されたローラXA1の摩擦係数を出力する摩擦係数出力手段として機能する。
【0020】
上記構成の簡易型振子式摩擦係数測定器10では、接触子15がローラXA1の上方を通過する際に、ローラXA1に対して基準となる垂直荷重が掛かるようにしている。基準となる垂直荷重には、接触子15をローラXA1に突き当てた状態から当該接触子15を0.5mm押し下げた場合にローラXA1に掛かる垂直荷重(7.85kN±誤差)を採用する。接触子15のローラXA1に突き当てた状態からの押下量と、ローラXA1に掛かる垂直荷重との関係は、図6に示すようになる。具体的に、ローラXA1に掛かる垂直荷重は、押下量に比例するコイルスプリング42の復元力と、振子14自体の荷重と、の合計である。ただし、振子14自体の荷重は、昇降機構13を構成する送りネジ35と昇降プレート34との間に遊び領域(ヒステリシス)が存在することに起因して、押下量が0mmから0.25mm付近までは、押下量に比例する分のみが掛かる。これは、錘43よりも基端側にコイルスプリング42を備えているからである。押下量が0.25mm付近以降は、遊び領域がなくなって、振子14自体の荷重の全体が掛かる。このため、図6では、押下量と垂直荷重との関係を示す線が、押下量が0.25mm付近で折れ曲がるように示される。押下量が少ない0mmから0.25mm付近までは、ローラXA1に掛かる垂直荷重の変化量は、押下量に比例するコイルスプリング42の復元力の変化量と、振子14自体の荷重における押下量に比例する分と、の合計で、図6に示す線の傾斜はきつい。このため、わずかな押下量で、摩擦係数の測定に必要となる垂直荷重の最低ラインを確保できる。例えば、0.25mm付近まで押し下げることで垂直荷重は7kNとなる。そして、押下量が0.25mm付近以降では、ローラXA1に掛かる垂直荷重の変化量は、押下量に比例するコイルスプリング42の復元力の変化量のみで、図6に示す線の傾斜は緩い。このため、押下量が0.25mm付近以降では、押下量の誤差による垂直荷重の誤差が少ない。コイルスプリング42には、押下量が0.5±0.05mmにおいて、ローラXA1に掛かる垂直荷重の誤差が±2%となるものを採用することが好ましい。
【0021】
次に、簡易型振子式摩擦係数測定器10を用いてローラXA1の摩擦係数を測定する方法について、図7A、図7Bおよび図7Cを参照しながら説明する。保持具20を用いて、簡易型振子式摩擦係数測定器10をローラXA1の周面に固定する。この時、振子14は真下に下がっている。微動ノブ36を操作して、接触子15をローラXA1から離間させる。簡易型振子式摩擦係数測定器10の電源を入れると共に、コントローラを初期値に設定する。振子14が基準となる高さまで持ち上げられる状態を0°として基準にするので、振子14が真下に下がっている初期値として90°に設定する。振子14を基準となる高さまで持ち上げると、マイクロブレーキ17が働いて振子14が停止する。テンキーを操作して、振子14を落下させる。振子14は、ローラXA1の上方を通過してから振り上がる。振子14がローラXA1の上方を通過する時、接触子15はローラXA1の周面に擦れない。振子14が最も振り上がった際に、マイクロブレーキ17が働いて当該振子14が停止する。ロータリーエンコーダー18から出力されるデジタル信号に基づいて、振子14の揺動角度がディスプレイに表示される。この揺動角度が179.0±0.1°の範囲となるように、簡易型振子式摩擦係数測定器10を調整してから測定を開始する。テンキーを操作して、振子14を真下に下ろす。微動ノブ36を操作して、接触子15をローラXA1に突き当てて、さらに、接触子15を0.5mm押し下げる。振子14を基準となる高さまで持ち上げると、マイクロブレーキ17が働いて振子14が停止する(図7A参照)。テンキーを操作して、振子14を落下させる(図7B参照)。振子14は、ローラXA1の上方を通過してから振り上がる(図7C参照)。振子14がローラXA1の上方を通過する時、接触子15はローラXA1の周面に擦れる。振子14が反対側に最も振り上がった際に、マイクロブレーキ17が働いて当該振子14が停止する。ロータリーエンコーダー18から出力されるデジタル信号に基づいて、ローラXA1の摩擦力がディスプレイに表示される。
【0022】
以上説明したように、簡易型振子式摩擦係数測定器10によれば、ブレーキテスタが備えるローラXA1の摩擦係数を簡単な作業で測定できる。
【0023】
尚、本発明の簡易型振子式摩擦係数測定器は、上記した各実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。また、上記した実施形態の構成要件を、可能な範囲で他の実施の形態に適用してもよい。すなわち、上記実施形態において、揺動角度検出手段としてデジタル信号を出力するロータリーエンコーダー18を採用しているが、これに限定されず、ポテンショメータ(可変抵抗器)から出力されるアナログ信号をA/D変換器によってデジタル信号に変換して出力するようにしてもよい。また、振子14と共に揺動する針によって、振子14の揺動角度を検出するようにしてもよい。あるいは、上記実施形態において、摩擦係数出力手段としてディスプレイを採用しているが、これに限定されず、プリンターを備えて紙などに印刷して出力するようにしてもよい。また、揺動角度検出手段として、振子14と共に揺動する針を採用した場合には、その針によって指示される目盛を、換算手段および摩擦係数出力手段として備えるようにしてもよい。この場合、目盛には、揺動角度に対応するように換算された摩擦係数を表示しておくことになる。
【0024】
あるいは、上記実施形態において、各構成の位置、大きさ、形状、数量は適宜変更できる。例えば、錘43および接触子15の形状を変更してもよい。具体的に、図8に示すように、錘57は、X軸方向に視て凸の字となる形状であって、その先端には、接触子58を取り付けるための平面57aが形成されている。この錘57は、平面57aからZ軸方向に貫通するネジ孔57bを有する。接触子58は、錘57に取り付けられた状態で、先端が凸となる曲面58aを有する。また、接触子58は、アーム41の長手方向に貫通するネジ孔58bを有する。ネジ孔58bは、接触子58が錘57の平面57aに配置された際にネジ孔57bに連続する。締結ネジ16は、錘57のネジ孔57b、接触子58のネジ孔58b、の順にねじ込まれ、接触子58を錘57に対して変位不能に固定する。
【符号の説明】
【0025】
10 振子式摩擦係数測定器
11 基礎
12 支柱
14 振子
15,58 接触子
15a 円柱周面(曲面)
16 締結ネジ(締結部材)
18 ロータリーエンコーダー(揺動角度検出手段)
20 設置部
21 保持具(固定手段)
41 アーム
42 コイルスプリング(弾性部材)
43,57 錘
XA1 ローラ
【技術分野】
【0001】
本発明は、接触子を用いて路面の摩擦係数を測定する簡易型振子式摩擦係数測定器に関する。
【背景技術】
【0002】
自動車などの車両が保安基準に適合しているか否かを検査する自動車検査登録制度がある。この自動車検査登録制度下で行われる車検では、ブレーキテスタを用いてタイヤの制動力を試験する。ブレーキテスタは、タイヤを載せる複数のローラを備えている。複数のローラは、鋼製で、その周面には長手方向に沿った溝が形成されている。これら複数のローラは、回転軸が平行となるように対にして並べて配置されている。このようなブレーキテスタでは、対となるローラ同士の間にタイヤを載せた状態で試験が行われる(例えば、特許文献1参照)。この試験では、ブレーキ時にローラに掛かる回転方向の力をタイヤの制動力として測定し、その制動力の車両重量との割合によって合否が決まる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−163834号公報(段落[0003]〜[0005]および図1参照)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ブレーキテスタのローラは、タイヤとの摩擦によって徐々に摩耗する。結果、タイヤとの間の摩擦係数が低下する。本発明者らによる調査結果によれば、調査用に用意した劣化していない基準となるタイヤとの間の摩擦係数は、未使用のローラの場合、0.7〜0.8程度であるのに対し、13年間使用されて1mm程度摩耗しているローラの場合、0.5以下であることが分かっている。測定されるタイヤの制動力は、タイヤに掛かる接地重量に、ローラとタイヤとの間の摩擦係数を乗じたものであるので、その測定値は、ローラの状態に大きく影響を受ける。このため、ローラの状態を一定に保つことが望まれる。
【0005】
しかしながら、従来の車検では、ローラが摩耗している場合であっても、そのことに気付かずに、または、そのことを気にせずに、タイヤの制動力の試験が行われている。このため、想定している制動力とは異なる制動力が測定されており、適切に合否を決めることができていない。そこで、本発明者らは、ローラが摩耗してタイヤの制動力を測定することに影響がある場合に、そのローラを交換するよう提言する予定である。そのためにも、ローラを交換する基準を摩擦係数によって定量的に設定した上で、ローラの摩擦係数を簡単に測定できる摩擦係数測定器を用意しなければならない。このような摩擦係数測定器は、ローラに限定されず、その他の路面の摩擦係数を測定することができれば、使い勝手がよい。
【0006】
本発明は、上記課題を鑑みてなされたものであり、路面の摩擦係数を簡単な作業で測定できる簡易型振子式摩擦係数測定器を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明は、路面の摩擦係数を測定する簡易型振子式摩擦係数測定器であって、基礎と、前記基礎から上方に延びる支柱と、前記支柱に対して前記X軸回りに揺動自在に取り付けられ、前記路面に向けて揺動するように落下させることで前記路面の上方を通過してから振り上がる振子と、前記振子の先端に設けられ、該振子が前記路面の上方を通過する際に該振子と共に前記路面の上方を通過して該路面に擦れる接触子と、基準となる高さから落下させた前記振子が、反対側に最も振り上がった時点の該振子の揺動角度を検出する揺動角度検出手段と、を備え、前記振子は、伸縮自在なアームと、前記アームの先端に設けられた錘と、前記錘よりも基端側に設けられ前記アームが縮む際に該アームに復元力を与える弾性部材と、を備えることを特徴とする、簡易型振子式摩擦係数測定器である。
【0008】
(2)本発明はまた、送りネジを有してなり、該送りネジの回転によって前記振子を昇降させる昇降機構を備えることを特徴とする、上記(1)に記載の簡易型振子式摩擦係数測定器である。(3)本発明はまた、前記接触子は、前記路面の上方を通過する際に下方に向けて凸となる曲面を有してなり、該曲面が前記路面の上方を通過する際に該路面に擦れることを特徴とする、上記(1)または(2)に記載の簡易型振子式摩擦係数測定器である。(4)本発明はまた、前記接触子を前記錘に対して変位不能に締結する締結部材を備え、前記接触子は、前記曲面として前記X軸回りの円柱周面を有してなり、前記締結部材による締結を緩めることで前記X軸回りに回転して、前記路面の上方を通過する際に該路面に擦れる部分が可変であることを特徴とする、上記(3)に記載の簡易型振子式摩擦係数測定器である。(5)本発明はまた、前記路面が磁石との間に引力を生じるものの場合に用いる簡易型振子式摩擦係数測定器であって、前記基礎は、前記路面に設置される設置部と、前記設置部と一体に設けられ該設置部を前記路面に固定する固定手段と、を備え、前記固定手段は、磁石を有してなり、該磁石の前記路面との間に生じる引力によって前記設置部を前記路面に固定することを特徴とする、上記(1)〜(4)のいずれかに記載の簡易型振子式摩擦係数測定器である。(6)本発明はまた、前記揺動角度検出手段で検出された前記揺動角度を前記路面の摩擦係数に換算する換算手段と、前記換算手段で換算された前記路面の摩擦係数を出力する摩擦係数出力手段と、を備え、前記揺動角度検出手段は、前記揺動角度に対応するデジタル信号を出力する角度センサであり、前記換算手段は、前記角度センサから出力された前記デジタル信号を利用して前記路面の摩擦係数を演算する演算手段であることを特徴とする、上記(1)〜(5)のいずれかに記載の簡易型振子式摩擦係数測定器である。
【発明の効果】
【0009】
本発明の上記(1)〜(6)に記載の簡易型振子式摩擦係数測定器によれば、路面の摩擦係数を簡単な作業で測定できるという優れた効果を奏し得る。
【図面の簡単な説明】
【0010】
【図1】本発明に係る簡易型振子式摩擦係数測定器の正面図である。
【図2】簡易型振子式摩擦係数測定器の側面図である。
【図3】昇降機構を説明する図であり、(A)は振子をローラから離間させた状態を、(B)は振子をローラに突き当てた状態を、それぞれ示す。
【図4】振子の一部断面正面図である。
【図5】錘を示す外観斜視図である。
【図6】接触子のローラに突き当てた状態からの押下量と、ローラに掛かる垂直荷重との関係を示す図である。
【図7A】簡易型振子式摩擦係数測定器の使用状態を示す図であり、振子を基準となる高さまで持ち上げた状態を示す。
【図7B】Aの状態から落下させた振子がローラの上方を通過している状態を示す。
【図7C】Bの状態の後に振子が最も振り上がった状態を示す。
【図8】錘の変形例を示す外観斜視図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら本発明の実施形態の例について詳細に説明する。なお、以下の説明では、図に示したX軸、Y軸およびZ軸を基準として方向を説明する。X軸およびY軸は互いに直角な水平軸であり、Z軸はX軸およびY軸に直角な鉛直軸である。各図において、一部の構成を適宜省略して、図面を簡略化する。
【0012】
図1および図2に示す簡易型振子式摩擦係数測定器10は、制動力を試験するブレーキテスタ(図示省略)が備えるローラXA1について、接触子15を用いて摩擦係数を測定するものである。具体的に、簡易型振子式摩擦係数測定器10は、振子14を基準となる高さから落下させて、振子14の先端に設けられた接触子15をローラXA1に擦らせ、その後の振子14の振り上がる量でローラXA1の摩擦係数を測定する。振子14の基準となる高さには、鉛直方向からの角度が90°となる高さを採用する。ブレーキテスタは、自動車検査登録制度下で行われる車検などに用いられる。ローラXA1は、鋼製で、その周面には長手方向に沿った溝(図示省略)が形成されている。このローラXA1は、ブレーキテスタから取り外されて所定の台(図示省略)に移動され、試験が行われる。本明細書では、ブレーキテスタは、長手方向がX軸方向に沿うように配置されるものとして説明する。なお、簡易型振子式摩擦係数測定器10は、ローラXA1に限定されず、その他の路面について摩擦係数を測定することも可能である。すなわち、本明細書では、ローラXA1を路面に含む概念とする。
【0013】
具体的に、簡易型振子式摩擦係数測定器10は、基礎11と、この基礎11から上方に延びる支柱12と、この支柱12の上方に設けられた昇降機構13と、この昇降機構13を介して支柱12に設けられた振子14と、この振子14の先端に設けられた接触子15と、この接触子15を振子14に締結する締結部材として機能する締結ネジ16と、振子14を基準となる高さなどで停止させるマイクロブレーキ17と、振子14の揺動角度を検出する揺動角度検出手段として機能するロータリーエンコーダー18と、測定器全体を統括的に制御するコントローラ(図示省略)と、を備えている。
【0014】
基礎11は、ローラXA1の周面に設置される設置部20と、この設置部20をローラXA1の周面に固定する固定手段となる一対の保持具21と、これら一対の保持具21を設置部20に連結する一対の連結プレート22と、を備えている。設置部20は、一対の台座25と、これら一対の台座25を互いに連結する一対の連結ステー26と、を備えている。一対の台座25は、それぞれ、直方体形状のブロックを元として構成される。具体的に、一対の台座25は、それぞれ、その底面における長手方向の中間部分が、ローラXA1の周面に嵌まるように当該ローラXA1の曲率に対応して円弧状に切り抜かれた形状を呈する。この円弧状に切り抜かれた部分がローラXA1の周面に設置される設置面25aとなる。これら一対の台座25は、互いにX軸方向に所定の間隔をおいて、長手方向がY軸方向に沿うように配置される。一対の連結ステー26は、それぞれ、長手方向がX軸方向に沿うように、一対の台座25の間に配置される。これら一対の連結ステー26は、それぞれ、その両端が一対の台座25にボルトなどによって固定される。一対の保持具21は、一対の連結プレート22によって設置部20と一体に設けられている。これら一対の保持具21は、磁石(図示省略)を有してなり、その磁石のローラXA1との間に生じる磁力(引力)によって設置部20をローラXA1の周面に固定する。具体的に、保持具21は、筐体29と、この筐体29内に収容された磁力発生機構(図示省略)と、筐体29の側面に設けられたレバー30と、を備えている。この磁力発生機構は、磁石によって、筐体29の底面に磁力を発生させるオン状態と、筐体29の底面に磁力を発生させないオフ状態と、を切り替える。レバー30は、磁力発生機構によるオン状態とオフ状態との切替えを手動で行わせる。このような保持具21には、例えば、カネテック株式会社(長野県上田市)が市販するMB−P形マグネットホルダ台(商品名)を採用できる。
【0015】
昇降機構13は、支柱12の上端から水平に延びる不動プレート33と、この不動プレート33の下方において昇降する昇降プレート34と、これら不動プレート33および昇降プレート34に貫通するように鉛直方向に延びる送りネジ35と、この送りネジ35の上端に固定されて不動プレート33の上面に配置された微動ノブ36と、を備えている。この昇降機構13は、周知の送りネジを採用するもので、不動プレート33を基準として、送りネジ35の回転によって昇降プレート34が昇降する。昇降プレート34は、10mmの範囲で昇降する。具体的に、昇降プレート34は、微動ノブ36を右に回転させた場合に上昇し、左に回転させた場合に下降する。また、昇降プレート34は、微動ノブ36を1回転させる毎に0.5mm昇降または下降する。これによって、図3(A)および図3(B)に示すように、振子14をローラXA1に離間させたり、振子14をローラXA1に突き当てて当該ローラXA1に垂直荷重を掛けたりできる。
【0016】
図4に示す振子14は、平衡精度が0.1%以下となるようにX軸回りに揺動自在に設けられ、ローラXA1に向けて揺動するように落下させることで当該ローラXA1の上方を通過してから振り上がる(図7A、図7Bおよび図7C参照)。具体的に、振子14は、昇降プレート34の下部に設けられた一対の軸受38,39と、これら一対の軸受38,39に支持されたX軸方向に延びる回転軸40と、この回転軸40に垂直に固定された伸縮自在なアーム41と、このアーム41の先端に設けられた錘43と、この錘43よりも基端側に設けられアーム41が縮む際に当該アーム41に復元力を与える弾性部材として機能するコイルスプリング42と、を備えている。アーム41は、基端から順に、回転軸40が貫通する基端部46と、この基端部46内に押し込まれるアーム本体47と、を備えている。基端部46は、回転軸40に直交する円筒形状を呈する基端部本体50と、この基端部本体50の先端に嵌め込まれてアーム本体47の脱落を防止するリング状のキャップ51と、を備えている。アーム本体47は、キャップ51に貫通する丸棒54と、この丸棒54の基端に設けられてキャップ51に引っ掛かるフランジ55と、を備えている。基端部本体50内には、回転軸40とフランジ55との間にコイルスプリング42が介在している。コイルスプリング42は、アーム本体47が基端部46内に押し込まれて縮められると、復元する方向に力を生じる。その復元力は、フックの法則に表れるように、コイルスプリング42の縮められた量に比例する。図5に示すように、錘43は、略直方体形状であって、その先端には、凸となる曲面43aが形成されている。そして、曲面43aの中央には、X軸方向の一端から他端の手前までに亘って、接触子15が嵌り込む溝43bが形成されていると共に、X軸方向の他端には、溝43bに繋がるネジ孔43cが形成されている。
【0017】
接触子15は、X軸方向に延びる円柱形状を呈し、X軸回りの円柱周面15aを有する。この接触子15は、錘43の溝43bに対し、X軸回りに回転自在に嵌まり込む。また、接触子15は、X軸方向に貫通するネジ孔15bを有する。ネジ孔15bは、接触子15が錘43の溝43bに嵌まり込んだ際にネジ孔43cに連続する。締結ネジ16は、錘43のネジ孔43c、接触子15のネジ孔15b、の順にねじ込まれ、接触子15を錘43に対して変位不能に固定する。接触子15は、振子14がローラXA1の上方を通過する際に当該振子14と共にローラXA1の上方を通過して当該ローラXA1の周面に擦れる。接触子15の円柱周面15aは、ローラXA1の上方を通過する際に下方に向けて凸となる曲面として機能する。締結ネジ16によって固定されている接触子15は、締結ネジ16による締結を緩めることでX軸回りに回転して、ローラXA1の上方を通過する際に当該ローラXA1に擦れる部分が可変である。例えば、20回測定する毎に、接触子15を30°回転させることで、一つの接触子15で240回測定できる。
【0018】
図1および図2に戻って説明する。マイクロブレーキ17は、一方の軸受38の側方に設けられる。このマイクロブレーキ17は、所定のタイミングに回転軸40の回転にブレーキを掛ける。具体的に、マイクロブレーキ17は、振子14が基準となる高さまで持ち上げられた際に、回転軸40の回転にブレーキを掛ける。また、マイクロブレーキ17は、落下させた振子14が最も振り上がる際に、回転軸40の回転にブレーキを掛ける。このようなマイクロブレーキ17には、例えば、小倉クラッチ株式会社(群馬県桐生市)が市販するAMB型マイクロ電磁ブレーキ(商品名)を採用できる。ロータリーエンコーダー18は、他方の軸受39の側方に設けられる。このロータリーエンコーダー18は、振子14が基準となる高さまで持ち上げられる状態を基準(0°)として、回転軸40の回転角度を検出し、検出した角度に対応するデジタル信号を出力する。すなわち、ロータリーエンコーダー18は、振子14の揺動角度に対応するデジタル信号を出力する。
【0019】
コントローラ(図示省略)は、CPU(図示省略)と、テンキー(図示省略)と、ディスプレイ(図示省略)と、パソコンなどにデータを出力するインターフェイス(図示省略)と、を備えている。CPUは、いわゆる中央演算処理装置であり、作業領域として使用されるRAM(図示省略)と、演算に用いるプログラムなどを記憶するROM(図示省略)と、を備えている。このCPUは、ロータリーエンコーダー18から出力されたデジタル信号を、ローラXA1の摩擦係数に換算する換算手段として機能する。テンキーは、演算係数を入力する際に用いられる。また、テンキーは、測定を開始する際に、振子14を落下させるスタートキーとして用いられる。ディスプレイは、CPUで換算されたローラXA1の摩擦係数を出力する摩擦係数出力手段として機能する。
【0020】
上記構成の簡易型振子式摩擦係数測定器10では、接触子15がローラXA1の上方を通過する際に、ローラXA1に対して基準となる垂直荷重が掛かるようにしている。基準となる垂直荷重には、接触子15をローラXA1に突き当てた状態から当該接触子15を0.5mm押し下げた場合にローラXA1に掛かる垂直荷重(7.85kN±誤差)を採用する。接触子15のローラXA1に突き当てた状態からの押下量と、ローラXA1に掛かる垂直荷重との関係は、図6に示すようになる。具体的に、ローラXA1に掛かる垂直荷重は、押下量に比例するコイルスプリング42の復元力と、振子14自体の荷重と、の合計である。ただし、振子14自体の荷重は、昇降機構13を構成する送りネジ35と昇降プレート34との間に遊び領域(ヒステリシス)が存在することに起因して、押下量が0mmから0.25mm付近までは、押下量に比例する分のみが掛かる。これは、錘43よりも基端側にコイルスプリング42を備えているからである。押下量が0.25mm付近以降は、遊び領域がなくなって、振子14自体の荷重の全体が掛かる。このため、図6では、押下量と垂直荷重との関係を示す線が、押下量が0.25mm付近で折れ曲がるように示される。押下量が少ない0mmから0.25mm付近までは、ローラXA1に掛かる垂直荷重の変化量は、押下量に比例するコイルスプリング42の復元力の変化量と、振子14自体の荷重における押下量に比例する分と、の合計で、図6に示す線の傾斜はきつい。このため、わずかな押下量で、摩擦係数の測定に必要となる垂直荷重の最低ラインを確保できる。例えば、0.25mm付近まで押し下げることで垂直荷重は7kNとなる。そして、押下量が0.25mm付近以降では、ローラXA1に掛かる垂直荷重の変化量は、押下量に比例するコイルスプリング42の復元力の変化量のみで、図6に示す線の傾斜は緩い。このため、押下量が0.25mm付近以降では、押下量の誤差による垂直荷重の誤差が少ない。コイルスプリング42には、押下量が0.5±0.05mmにおいて、ローラXA1に掛かる垂直荷重の誤差が±2%となるものを採用することが好ましい。
【0021】
次に、簡易型振子式摩擦係数測定器10を用いてローラXA1の摩擦係数を測定する方法について、図7A、図7Bおよび図7Cを参照しながら説明する。保持具20を用いて、簡易型振子式摩擦係数測定器10をローラXA1の周面に固定する。この時、振子14は真下に下がっている。微動ノブ36を操作して、接触子15をローラXA1から離間させる。簡易型振子式摩擦係数測定器10の電源を入れると共に、コントローラを初期値に設定する。振子14が基準となる高さまで持ち上げられる状態を0°として基準にするので、振子14が真下に下がっている初期値として90°に設定する。振子14を基準となる高さまで持ち上げると、マイクロブレーキ17が働いて振子14が停止する。テンキーを操作して、振子14を落下させる。振子14は、ローラXA1の上方を通過してから振り上がる。振子14がローラXA1の上方を通過する時、接触子15はローラXA1の周面に擦れない。振子14が最も振り上がった際に、マイクロブレーキ17が働いて当該振子14が停止する。ロータリーエンコーダー18から出力されるデジタル信号に基づいて、振子14の揺動角度がディスプレイに表示される。この揺動角度が179.0±0.1°の範囲となるように、簡易型振子式摩擦係数測定器10を調整してから測定を開始する。テンキーを操作して、振子14を真下に下ろす。微動ノブ36を操作して、接触子15をローラXA1に突き当てて、さらに、接触子15を0.5mm押し下げる。振子14を基準となる高さまで持ち上げると、マイクロブレーキ17が働いて振子14が停止する(図7A参照)。テンキーを操作して、振子14を落下させる(図7B参照)。振子14は、ローラXA1の上方を通過してから振り上がる(図7C参照)。振子14がローラXA1の上方を通過する時、接触子15はローラXA1の周面に擦れる。振子14が反対側に最も振り上がった際に、マイクロブレーキ17が働いて当該振子14が停止する。ロータリーエンコーダー18から出力されるデジタル信号に基づいて、ローラXA1の摩擦力がディスプレイに表示される。
【0022】
以上説明したように、簡易型振子式摩擦係数測定器10によれば、ブレーキテスタが備えるローラXA1の摩擦係数を簡単な作業で測定できる。
【0023】
尚、本発明の簡易型振子式摩擦係数測定器は、上記した各実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。また、上記した実施形態の構成要件を、可能な範囲で他の実施の形態に適用してもよい。すなわち、上記実施形態において、揺動角度検出手段としてデジタル信号を出力するロータリーエンコーダー18を採用しているが、これに限定されず、ポテンショメータ(可変抵抗器)から出力されるアナログ信号をA/D変換器によってデジタル信号に変換して出力するようにしてもよい。また、振子14と共に揺動する針によって、振子14の揺動角度を検出するようにしてもよい。あるいは、上記実施形態において、摩擦係数出力手段としてディスプレイを採用しているが、これに限定されず、プリンターを備えて紙などに印刷して出力するようにしてもよい。また、揺動角度検出手段として、振子14と共に揺動する針を採用した場合には、その針によって指示される目盛を、換算手段および摩擦係数出力手段として備えるようにしてもよい。この場合、目盛には、揺動角度に対応するように換算された摩擦係数を表示しておくことになる。
【0024】
あるいは、上記実施形態において、各構成の位置、大きさ、形状、数量は適宜変更できる。例えば、錘43および接触子15の形状を変更してもよい。具体的に、図8に示すように、錘57は、X軸方向に視て凸の字となる形状であって、その先端には、接触子58を取り付けるための平面57aが形成されている。この錘57は、平面57aからZ軸方向に貫通するネジ孔57bを有する。接触子58は、錘57に取り付けられた状態で、先端が凸となる曲面58aを有する。また、接触子58は、アーム41の長手方向に貫通するネジ孔58bを有する。ネジ孔58bは、接触子58が錘57の平面57aに配置された際にネジ孔57bに連続する。締結ネジ16は、錘57のネジ孔57b、接触子58のネジ孔58b、の順にねじ込まれ、接触子58を錘57に対して変位不能に固定する。
【符号の説明】
【0025】
10 振子式摩擦係数測定器
11 基礎
12 支柱
14 振子
15,58 接触子
15a 円柱周面(曲面)
16 締結ネジ(締結部材)
18 ロータリーエンコーダー(揺動角度検出手段)
20 設置部
21 保持具(固定手段)
41 アーム
42 コイルスプリング(弾性部材)
43,57 錘
XA1 ローラ
【特許請求の範囲】
【請求項1】
路面の摩擦係数を測定する簡易型振子式摩擦係数測定器であって、
基礎と、
前記基礎から上方に延びる支柱と、
前記支柱に対して前記X軸回りに揺動自在に設けられ、前記路面に向けて揺動するように落下させることで前記路面の上方を通過してから振り上がる振子と、
前記振子の先端に設けられ、該振子が前記路面の上方を通過する際に該振子と共に前記路面の上方を通過して該路面に擦れる接触子と、
基準となる高さから落下させた前記振子が、反対側に最も振り上がった時点の該振子の揺動角度を検出する揺動角度検出手段と、を備え、
前記振子は、伸縮自在なアームと、前記アームの先端に設けられた錘と、前記錘よりも基端側に設けられ前記アームが縮む際に該アームに復元力を与える弾性部材と、を備えることを特徴とする、
簡易型振子式摩擦係数測定器。
【請求項2】
送りネジを有してなり、該送りネジの回転によって前記振子を昇降させる昇降機構を備えることを特徴とする、
請求項1に記載の簡易型振子式摩擦係数測定器。
【請求項3】
前記接触子は、前記路面の上方を通過する際に下方に向けて凸となる曲面を有してなり、該曲面が前記路面の上方を通過する際に該路面に擦れることを特徴とする、
請求項1または2に記載の簡易型振子式摩擦係数測定器。
【請求項4】
前記接触子を前記錘に対して変位不能に締結する締結部材を備え、
前記接触子は、前記曲面として前記X軸回りの円柱周面を有してなり、前記締結部材による締結を緩めることで前記X軸回りに回転して、前記路面の上方を通過する際に該路面に擦れる部分が可変であることを特徴とする、
請求項3に記載の簡易型振子式摩擦係数測定器。
【請求項5】
前記路面が磁石との間に引力を生じるものの場合に用いる簡易型振子式摩擦係数測定器であって、
前記基礎は、前記路面に設置される設置部と、前記設置部と一体に設けられ該設置部を前記路面に固定する固定手段と、を備え、
前記固定手段は、磁石を有してなり、該磁石の前記路面との間に生じる引力によって前記設置部を前記路面に固定することを特徴とする、
請求項1〜4のいずれかに記載の簡易型振子式摩擦係数測定器。
【請求項6】
前記揺動角度検出手段で検出された前記揺動角度を前記路面の摩擦係数に換算する換算手段と、
前記換算手段で換算された前記路面の摩擦係数を出力する摩擦係数出力手段と、を備え、
前記揺動角度検出手段は、前記揺動角度に対応するデジタル信号を出力する角度センサであり、
前記換算手段は、前記角度センサから出力された前記デジタル信号を利用して前記路面の摩擦係数を演算する演算手段であることを特徴とする、
請求項1〜5のいずれかに記載の簡易型振子式摩擦係数測定器。
【請求項1】
路面の摩擦係数を測定する簡易型振子式摩擦係数測定器であって、
基礎と、
前記基礎から上方に延びる支柱と、
前記支柱に対して前記X軸回りに揺動自在に設けられ、前記路面に向けて揺動するように落下させることで前記路面の上方を通過してから振り上がる振子と、
前記振子の先端に設けられ、該振子が前記路面の上方を通過する際に該振子と共に前記路面の上方を通過して該路面に擦れる接触子と、
基準となる高さから落下させた前記振子が、反対側に最も振り上がった時点の該振子の揺動角度を検出する揺動角度検出手段と、を備え、
前記振子は、伸縮自在なアームと、前記アームの先端に設けられた錘と、前記錘よりも基端側に設けられ前記アームが縮む際に該アームに復元力を与える弾性部材と、を備えることを特徴とする、
簡易型振子式摩擦係数測定器。
【請求項2】
送りネジを有してなり、該送りネジの回転によって前記振子を昇降させる昇降機構を備えることを特徴とする、
請求項1に記載の簡易型振子式摩擦係数測定器。
【請求項3】
前記接触子は、前記路面の上方を通過する際に下方に向けて凸となる曲面を有してなり、該曲面が前記路面の上方を通過する際に該路面に擦れることを特徴とする、
請求項1または2に記載の簡易型振子式摩擦係数測定器。
【請求項4】
前記接触子を前記錘に対して変位不能に締結する締結部材を備え、
前記接触子は、前記曲面として前記X軸回りの円柱周面を有してなり、前記締結部材による締結を緩めることで前記X軸回りに回転して、前記路面の上方を通過する際に該路面に擦れる部分が可変であることを特徴とする、
請求項3に記載の簡易型振子式摩擦係数測定器。
【請求項5】
前記路面が磁石との間に引力を生じるものの場合に用いる簡易型振子式摩擦係数測定器であって、
前記基礎は、前記路面に設置される設置部と、前記設置部と一体に設けられ該設置部を前記路面に固定する固定手段と、を備え、
前記固定手段は、磁石を有してなり、該磁石の前記路面との間に生じる引力によって前記設置部を前記路面に固定することを特徴とする、
請求項1〜4のいずれかに記載の簡易型振子式摩擦係数測定器。
【請求項6】
前記揺動角度検出手段で検出された前記揺動角度を前記路面の摩擦係数に換算する換算手段と、
前記換算手段で換算された前記路面の摩擦係数を出力する摩擦係数出力手段と、を備え、
前記揺動角度検出手段は、前記揺動角度に対応するデジタル信号を出力する角度センサであり、
前記換算手段は、前記角度センサから出力された前記デジタル信号を利用して前記路面の摩擦係数を演算する演算手段であることを特徴とする、
請求項1〜5のいずれかに記載の簡易型振子式摩擦係数測定器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【公開番号】特開2013−96892(P2013−96892A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−241089(P2011−241089)
【出願日】平成23年11月2日(2011.11.2)
【出願人】(301028761)独立行政法人交通安全環境研究所 (55)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月2日(2011.11.2)
【出願人】(301028761)独立行政法人交通安全環境研究所 (55)
[ Back to top ]