
粒子ビームを用いた患者における腫瘍組織の照射のためのデバイス
本発明は、粒子ビームを用いた患者における腫瘍組織(3)のスライス毎照射を達成するためのデバイスに関し、所定のスライス毎のエネルギーを有する粒子ビーム(5)を生成するための加速器(7)、腫瘍組織(3)のスライス毎照射のための粒子ビーム(5)に作用するラスタースキャンデバイス(9)、粒子ビーム(5)のエネルギーを変調するためのモジュレータ(17)、腫瘍組織(3)の位置の時間分解検出のための検出デバイス(37)、ならびに照射プロセスの前に決定された腫瘍組織(3)のデータを記憶するため、および該データをラスタースキャンデバイス(9)およびモジュレータ(17)へ伝達するための第1の記憶デバイスを含む、前記デバイスに関する。本デバイスは、照射プロセスの間に照射プロセスの個別のデータを検出するモジュール(39)および検出デバイス(37)よって特徴づけられる。

【発明の詳細な説明】
【技術分野】
【0001】
説明
本発明は、請求項1の序文に従って、粒子ビームを用いた患者の、とくに患者における腫瘍の放射線照射のためのデバイスに関する。本発明はまた、請求項9に従って、照射操作の間の、患者の動きまたは患者の照射される範囲を補正する方法に関する。
【背景技術】
【0002】
ここに記載されている種類のデバイスは、既知である。それらは、患者における腫瘍組織の照射の間に、照射される標的範囲の動きを補正するために用いられる。照射されている腫瘍組織の動きは、とくに患者の呼吸の動きの間に生じる。腫瘍の累積照射線量への呼吸の動きの影響を最小限に抑えるため、標的の体積を通常は増加させ、このことは、健康な組織も照射されるため、患者にダメージを引き起こし得る。これは、副作用の確率を増加する。健康な組織へ適用される照射線量を低減するための提案が既になされている。一つの提案は、例えば、腹壁を圧迫すること、それにより患者の横隔膜の可動性を制限することによって、照射される腫瘍組織の動きの範囲を低減することである。他の可能性は、自然呼吸を高周波人工呼吸(ジェット換気)に置き換えることである。最終的に、呼吸を一定期間停止できる高酸素人口呼吸もまた、考慮すべきかもしれない。
【0003】
さらなる可能性は断続照射(開閉)であり、そこでは、患者が普通に呼吸をし、照射されている腫瘍組織が所望の位置にある特定の時間の間だけ腫瘍が照射される。その手順は、照射操作の継続が持続的に増加する結果を有する。
【0004】
放射線の照射線量を、一回だけでなく数サイクルにわたって適用することも可能である。その繰り返し照射(再スキャン)は、標的の容積の拡大を必要とする。腫瘍は動きの全ての状態において照射されることを必要とするため、標的の容積の拡大が必要である。これは結果的に、健康な組織も照射されるため、患者に対してダメージをもたらし得る。腫瘍の所望の照射線量負荷を達成するために、以下に記載されるように、干渉の平均が選ばれる。その方法では、腫瘍が、動きの全ての状態においてヒットされる必要があり、健康な組織の不必要な負荷の結果をもたらす。
【0005】
もし粒子ビームが、そのとき照射を受けている腫瘍組織の動きを追跡しない場合には、静的な照射と比較して、照射の結果に悪影響を与える差異が生じるということが見出されている。照射されている組織において、照射の進行および腫瘍の動きが互いに重ね合わされるため、照射されていない部位または2回以上照射されている部位が生じる。
【0006】
照射操作の間の腫瘍組織の位置の変化を補正することが可能な手段によって提供される制御手段を有する、腫瘍組織の照射に用いられるデバイスがまた、知られている(DE 1031071A1)。その処理において、適用される照射線量を理解するために、腫瘍の動きとの時間相関における照射操作の正確なコースを決定することが必要である。
【発明の開示】
【0007】
したがって本発明の目的は、照射手順と腫瘍の動きとの間に正確な時間相関を構成することを可能にするデバイスを提供することである。
【0008】
その問題を解決するために、請求項1に記載されている特徴を有するデバイスが提案される。本デバイスは、一般的な構成要素、すなわち、治療ビームといわれる各々のスライスのための所定の粒子エネルギーを有する粒子ビームを生成する加速器、および粒子ビームを互いに垂直である2方向に偏向させ、また腫瘍組織のスライス毎スキャン(slice-by-slice scanning)を可能な状態にするラスタースキャンデバイス(raster scanning device)を含む。本デバイスはまた、腫瘍組織の異なる深さで起こる粒子ビームのブラッグ最大(Bragg maximum)といわれる、加速エネルギーによって予め定められる最大照射線量負荷の範囲が、生体構造の変化に対して侵入深さを適合させるために素早く変更できるように、粒子ビームのエネルギーを変化させることができるモジュレータを有する。
【0009】
デバイスの検出手段は、腫瘍組織の位置および腫瘍組織の位置ずれを検出する働きをする。したがってそれは、腫瘍組織の位置の時間分解検出(time-resolved detection)を可能な状態とする。検出デバイスによって得られたデータが、第1の記憶デバイスへ伝達される。さらに、腫瘍の動きを、例えば、照射操作に先行して記録されたような患者の呼吸の動きを、記憶デバイス内に記憶することができる。腫瘍の動きが、例えば患者の呼吸の動きが、照射操作に先行して検出され、記憶デバイスに記憶される。そのようにして、照射操作の間に粒子ビームを偏向することが可能であるため、それは実質的に腫瘍組織の動きを追跡し、所要の特定の侵入深さをモジュレータを経由して適合させる。
【0010】
本発明のデバイスは、一方においては、照射のコースのデータを記録するモジュールを備えるという事実によって区別される。したがって、ラスタースキャンデバイスによって予め定められた粒子ビームの位置が、時間とともに検出され、可能な変調を含む粒子ビームのエネルギーもまた、照射のための加速手段によって提供される。したがって、粒子ビームのブラッグ最大がどの深さに存在するかを決定することが可能である。
【0011】
他方では、モジュールが、患者の照射の間に用いられる検出デバイスのデータを記録し、このデバイスは、照射を受けている腫瘍組織の位置を、時間とともに検出する。その配置においては、位置を、カメラ手段によって、例えば、照射を受けている患者の皮膚、照射操作の間に検出される動きに適用されるカラーマーカまたは光源、とくに発光ダイオードによって、間接的に決定することが可能である。他の可能性は、腫瘍位置の直接蛍光透視法検出または患者の表面の動きの検出である。
【0012】
したがって本デバイスは、照射操作の間に、正確な情報が、照射のコースおよび照射を受けている腫瘍組織の動きについて存在するという事実によって区別される。照射のコースと腫瘍組織の動きの間の間接的な関係は、モジュール内の相関ユニットによって記録される。相関ユニットのデータは、吸収量が腫瘍範囲またはラスターポイント(raster point)のどちらへ配分されたかについての情報を与える。
【0013】
さらなる進展は、従属項から明らかである。
この問題はまた、請求項9に与えられた特徴をによる、粒子ビームを用いた照射の間の、患者の動きまたは患者の照射範囲を補正する方法によって解決される。本方法においては、腫瘍組織は、記憶デバイス内に記憶されたデータを考慮しながら照射される。これらのデータは、実際の照射操作の前に連続して関連付けられている検出操作の間に検出デバイス手段によって得られ、そのデバイスは、腫瘍組織の位置の時間分解検出のため、すなわち腫瘍組織の動きの検出のために用いられている。
【0014】
照射操作の間の、照射のコースのデータは、モジュールに記録される。したがって、腫瘍組織のスライス毎スキャンは、ラスタースキャンデバイスおよび粒子ビームのエネルギーを用いて検出される。
【0015】
照射の間に、さらに腫瘍組織の現在位置が、時間とともにモジュールによって記録される。次に、照射のコースのデータおよび動きのコースのデータの相関関係によって、現在の腫瘍の位置と実際の照射のコースの関連付けが可能となる。したがって、腫瘍内の照射線量の累積を確認することができる。
【0016】
本方法のさらなる実施態様は、従属項から明らかである。
請求項1に記載のデバイスの操作および請求項9に記載の方法の実施に関連して、請求項12の特徴を有する照射線量の計算方法、および/または請求項15の特徴を有する照射計画の方法が、前述の問題を解決するために用いられる。
【0017】
本発明は、以下の図を参照して、さらに詳細に説明される:
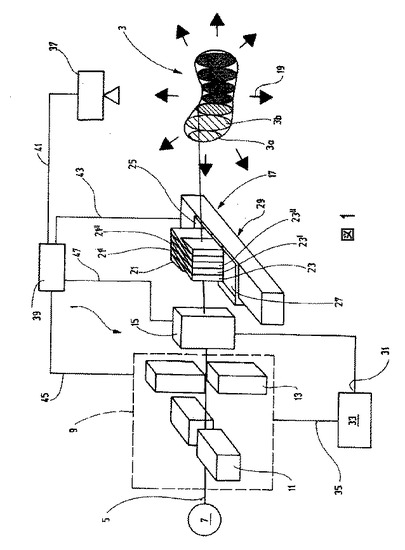
図1は、粒子ビーム5を用いた腫瘍組織3のスライス毎照射のためのデバイス1の基本ダイアグラムを示し、これは、ここに概説のみされている加速器7によって提供される。加速器は、実際に照射されている層に必要なエネルギーを有する粒子を供給する。粒子ビーム5は、腫瘍組織3のスライス毎のスキャンをするために、水平方向および垂直方向の両方に、ラスタースキャンデバイス9を用いて偏向される。一例として、ラスタースキャンデバイス9には、その目的のために、第1の一対の磁石11および第2の一対の磁石13が備えられる。照射されるスライスは、加速器によって供給される粒子エネルギーによって、処置を施される。用いられる粒子は、好ましくは12C粒子である。
【0018】
ラスタースキャンデバイス9から発するビームは、例えばイオン化チャンバーのような、粒子カウンタ15を通して形成することができ、次にダウンビームに配置されたモジュレータ17の中を通り、その後に照射されている腫瘍組織3に到達する。矢印19によって示すように、後者は動くことができる。
【0019】
モジュレータ17は、互いに反対側に位置するくさび形の少なくとも2つのモジュレータプレート21、23を有することができ、これは好適な駆動部を用いて互いに近づきおよび離れることができ、その結果粒子ビーム5は、腫瘍組織3をヒットする前に、程度の差はあるが厚いモジュレータ材料の中を通る。好ましくは、モジュレータ17は、互いに近接して設置されている複数個のプレート21、21’、21’’など、および互いに近接して設置されているモジュレータプレート23、23’、23’’などを有し、ここで、互いに近接して設置されている各々のプレート21、21は第1駆動部25と関連し、互いに近接して設置されている各々のプレート23、23は第2駆動部27と関連し、これらの駆動部は駆動デバイス29の一部を形成する。その種類のモジュレータは既知であるため、それらについてのさらなる詳細はここに加えない。
【0020】
粒子ビーム5のエネルギーはモジュレータ17を用いて変調され、そのような手段により粒子ビームの方向に測定されたブラッグ最大の位置が変化し、とくに、例えば、呼吸の動きおよびそれによる患者における密度の変化という現象においてでさえ、そのような手段によって、侵入深さが変化されて所望の層にとどまる。
【0021】
したがって、ラスタースキャンデバイス9を用いて、腫瘍組織3はスライス毎にスキャンされ、すなわち、粒子ビームの粒子によって作用を受ける。モジュレータ17は、粒子ビーム5の方向に測定されたスキャンスライスの位置を、呼吸の動きの状態に適合させる働きをする。図1において、スライス3a、3bなどの番号は、腫瘍組織3の内部を示す。
【0022】
腫瘍の範囲に累積される粒子ビーム5の照射線量は、粒子ビーム5の中に存在する粒子の数に依存する。照射操作の間に、腫瘍組織3に作用する粒子の数は、粒子カウンタ15を用いて決定される。所望の粒子数に到達した場合、信号が、ライン31によって制御手段33へ伝達され、制御手段33はライン35を経由してラスタースキャンデバイス9に接続されている。所望の粒子数が粒子カウンタ15によって検出された場合、ラスタースキャンデバイス9の作動は、ライン35を経由して腫瘍組織3の内部の次のラスターポイントをアドレス指定する方法によって達成される。
【0023】
デバイス1はまた、検出デバイス37、ならびにライン41を経て検出デバイス37に、ライン43を経てモジュレータ17に、およびライン45を経てラスタースキャンデバイス9に接続されているモジュール39を含む。最後に、モジュール39は、ライン47を経て粒子カウンタ15に接続されている。
【0024】
特別な優先権が、例えば患者の呼吸の間の腫瘍組織の動きのコースの検出のために、蛍光透視法(fluoroscopy)システムまたはカメラシステムの方式の検出デバイスを有するデバイス1へ与えられている。
【0025】
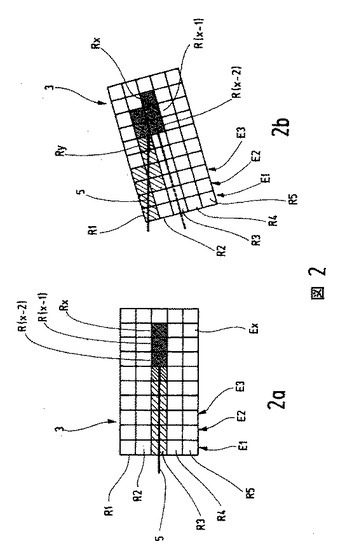
図2は、腫瘍組織3の一部の基本ダイアグラムであり、2aの数字に従って左は、最初の位置であり、2bの数字に従って右は、例えば呼吸の動きが理由の2番目の傾いた位置である。
【0026】
腫瘍組織3が照射されていることが、図2aに示されているE1、E2およびE3平面などのグリッド形内の正方形によって示されている。平面内に存在する正方形は、個別のラスターポイントを示すことを目的としている。図2a内の腫瘍組織の部分は、ラスターポイントR1からR5を示す。
【0027】
平面Ex内のラスターポイントRxが、粒子ビーム5を用いた照射線量によって作用を受けていることが図2aから明らかである。ラスターポイントRxの左にあるラスターポイントR(x−1)、R(x−2)などからR3までは、部分的な照射線量によって同時にすでに作用を受けている。したがって、ラスターポイントにおいては、そこに位置するブラッグ最大のみならず、組織内のより深部にブラッグ最大の位置を有するビームもまた照射線量の累積にそれぞれ貢献する。
【0028】
図2bは、図2aに対して左回りに回転させた位置における、腫瘍組織3の部分要素を示す。同じリファレンス数字は、すでに図2aにおいて図示されている同じ要素を示すために用いられる。したがって、ここに示される腫瘍組織3の部分が、E1、E2、E3などの平面内に配列されているラスターポイント、平面E1内に位置するラスターポイントR1からR5を有することは明らかである。
【0029】
ビーム位置の変調によって、粒子ビーム5は、ラスターポイントRxを再びヒットする。腫瘍組織3は傾いているため、図2aとは異なり、粒子ビーム5は、互いに近接して位置しているラスターポイントの横列を通り抜けることができないが、異なる横列に位置するラスターポイントをヒットする。腫瘍組織3の部分の最上部の横列において、互いに近接して位置する4つのラスターポイント、すなわちラスターポイントR1およびその右に隣接する3つのラスターポイントがヒットされる。2番目の横列において、ラスターポイントR2から離れたラスターポイント、最終的に、平面E1内に位置するラスターポイントE3のような同一の横列内に位置するラスターポイントがヒットされる。
【0030】
ラスターポイントRyは、若干低い照射線量によって作用を受ける。その左に位置するラスターポイントは、低い照射線量で順番に照射される。粒子ビームのブラッグ最大がRx内に位置している粒子ビームによるラスターポイントRxの照射において、異なって配列されたラスターポイントが、照射線量によってすでに作用を受けていることは、図2aおよび2bから明らかである。互いのラスターポイントの異なる相対位置は、腫瘍の動きとの関連によって、ここに図示されているように、例えば回転の角度によってもたらされる。
【0031】
以下に、患者における腫瘍組織の照射のための図1に示されるデバイスの操作、および図1に記載のデバイスを用いた粒子ビームによる照射の間の、患者の動きまたは患者の照射範囲を補正する方法の詳細が加えられる。
【0032】
動きの間に、例えば患者が呼吸をしている場合に、患者における腫瘍組織3は、検出デバイス、例えば検出デバイス37を用いて検出される。動きのコースにおける腫瘍組織3の異なる位置はまた、動きを、準静的(quasi-static)、好ましくは動きの重なり合わないフェーズへ分解することよって検出することができる。したがって、腫瘍組織の動きの時間分解検出が起こる。
【0033】
照射に先行して、動きの検出は、好ましくは4D−CT(4Dコンピュータ断層撮影)として設計されたデバイスを用いることにより達成される。その中に生成される動きのフェーズ(movement phases)は、例えば患者の皮膚上のカラーポイントまたはそこに適用された光源を検出するビデオカメラを用いて、間接的に検出することができる。照射の間の動きの存在の状態を、次に、例えば4D−CTの動きのフェーズに関連付けることができる。しかしながら、好ましくは動きは、表面検出のための蛍光透視法システムまたはカメラシステム方式の検出デバイスを用いて検出される。したがって、照射手順の間の腫瘍組織の局所的位置は、連続的にまたは時間内のある特定の点で決定することができる。
【0034】
異なる動きのフェーズのこれらのデータは、図1中には示されていない第1記憶デバイス内に記憶される。
照射操作の間、腫瘍の動きは、検出システムによって動きのフェーズに関係づけられる。第1記録デバイスからのデータを用いたモジュール39における補正は、ラスタースキャンデバイス9およびモジュレータ17を制御するために用いられ、その結果、粒子ビーム7が、異なる動きのフェーズにおける腫瘍組織3に、計画通りに照射される。
【0035】
したがって、これらのデータは、ラスタースキャンデバイス9を制御するために用いられるため、動きの間でさえ、腫瘍組織3のスライス毎スキャンが起こる。
腫瘍組織内の粒子ビーム5の侵入深さ、すなわち粒子ビームのブラッグ最大が位置する腫瘍組織3内の平面3a、3bなどは、駆動部25および27を用いて、程度の差はあるが互いの方向へ移動されるモジュレータプレート21、21’、21’’および23、23’、23’’などの、モジュレータ17の作動によって設定される。
【0036】
腫瘍組織3内のラスターポイントの照射の間に、粒子ビーム5の粒子数は、例えばイオン化チャンバーの方式の粒子カウンタ15を用いて決定される。ラスターポイントにおいて所望の粒子数に達した場合、ラスタースキャンデバイス9が、次のラスターポイントが照射される方法により作動される。照射スキャンの間に、患者または腫瘍組織3の現実の位置が、検出デバイス37を用いた時間分解法により検出される。例えばビデオカメラを用いた間接的検出、または例えば蛍光透視システムもしくはカメラシステムを手段とした直接的検出を、ここで実施することが可能である。
【0037】
一方では、モジュール39は、腫瘍組織3内のラスターポイントおよびそこへ照射された吸収量を時間とともに検出することによって、現在進行中の照射操作を検出する。そのようにして、腫瘍組織3のどのラスターポイントが、時間内にどの程度の照射線量でどのポイントが照射されているかを正確に知ることができる。反対に、照射操作によって到達したラスターポイント毎の照射された吸収量をまた、決定できる。
【0038】
一方で、照射の間の腫瘍組織3の動きは、モジュール39を用いることによって決定される。その結果、時間内のある特定の点の照射線量によって、患者の身体内の実際のラスターポイントが作用を受けているかどうかを知ることができる。
【0039】
照射操作に関連するデータ、および照射操作の間に生じる腫瘍組織3の動きは、患者の身体内のラスターポイントにおける照射線量についての前記情報を決定できるように、互いを用いて補正することができる。
【0040】
補正によって得られた情報は、ここには示されていない第2記憶デバイスに記憶することができる。もし、第1記憶デバイスが適切に形成されている場合、それらのデータはまた、そこへ記憶することもできる。それらは、照射のプロトコルへ伝達され、そのプロトコルは照射後に評価される。そのようにして、照射結果を評価することが可能となる。例えば、腫瘍のラスターポイントが、低すぎる照射線量で照射されているどうかについて、確認することが可能である。
【0041】
一般的に、複数の治療部分が、またの名を画分が、腫瘍組織の治療のために提供される。プロトコル内に策定されたデータに基づいて、次の照射における腫瘍組織のラスターポイントのため選択される照射線量を、もう一度決定することができる。
【0042】
とくに好ましくは、モジュール39のデータの補正によって得られた情報は、進行中の照射操作の調整に用いることができる。したがって、標的範囲が動いている場合に、腫瘍組織3の方へ向けられたラスタースキャンデバイス9によって方向付けされた粒子ビーム5の照射線量を適合することが可能である。照射操作において、腫瘍組織の個別のラスターポイントは、粒子ビームによって作用を受ける。さらなるラスターポイントの照射の前に、次のラスターポイントのために用いる照射線量を決定することが、モジュール39内に存在するデータに基づいて可能である。そうすることで、前回のラスターポイントの照射の間の部分的な照射によって、すでに作用を受けているラスターポイントかどうかを検討事項へ取り入れることが可能である(図2参照)。そのような場合、次に、以前に照射されたのラスターポイントのための照射線量が適合される。しかしながら、そのような適合は、加えるべき照射線量の増加、または減少をも結果としてもたらすかもしれない。
【0043】
デバイス1の処理において、モジュール39内に存在する照射操作に関係するデータおよび患者の動きに関係するデータは、相互に関連づけられ、およびそれらから得られる情報は、ラスタースキャンデバイス9およびモジュレータ17を直接的に操作するために用いられる。
【0044】
好ましくは、腫瘍組織の可能性のある動きのフェーズは、照射操作に先行して、検出および記憶される。粒子ビーム5の腫瘍組織の特定のラスターポイントへの導入に先行して、記憶デバイスからの取り出した補正値を手段として、次のラスターポイントのための照射線量のみならず、ビーム位置の補正およびモジュレータの設定の必要性を決定することが可能となる。
【0045】
モジュール39のラスタースキャンデバイス9およびモジュレータ17への接続を用いて、照射操作の間の腫瘍組織の動きが補正されるため、粒子ビームを用いる患者における腫瘍組織の照射の方法を大幅に向上させる制御回路が形成される。
ここに記載されたデバイス1を用いた患者における腫瘍組織3の照射が急に増加すると、線量計算および照射計画のためのプロセスが実行される。
【0046】
スキャンされた粒子ビームのための照射線量の計算のためのプロセスにおいて、照射されている腫瘍組織の異なる位置が患者内に検出される。それに応じて、例えば患者の呼吸のために、照射操作の間に静止していない動いている患者における腫瘍への照射を可能とするために、腫瘍組織3の動きのコースが確認される。
【0047】
腫瘍組織の動きは、好ましくは互いに重なり合わない、準静的な動きのフェーズへ分割される。したがって動きは、連続的に記録されるのではなく、個別の分離した動きのフェーズに関連して記憶される。
【0048】
各々の動きのフェーズのために、部分的な照射計画が設定され、ここで、粒子ビーム5を用いて腫瘍組織3がスキャンされるの間の動きのフェーズのための照射線量が部分的照射計画から計算され、動きのフェーズが評価される。したがって、各々の動きのフェーズのために、部分的照射計画および部分的照射線量の両方が得られる。
【0049】
異なる動きのフェーズにおける解剖学的な構造は、動きが理由で、正確に同じ位置に存在するとは限らない。動きのフェーズ毎の個別の照射線量は、すなわち部分的な照射線量は、したがって簡単には合計することができない。動きのフェーズを用いて評価した部分的な照射線量を、解剖学的な動き考慮に入れたリファレンス状態へ変換することが必要である。
その変換をして初めて、部分的な照射線量を全体の照射線量へ合計することが可能となる。
【0050】
照射操作の間のブラッグ最大の位置を決定できるようにするために、ブラッグ最大が、リファレンス状態から補正値を用いた他のフェーズに変換されることが必要である。これは、ここに示されていないコンピュータ要素によって確保される。
【0051】
その手順において、腫瘍組織3の動きに起因する最初の補正値を考慮に入れることが必要である。その場合、所要のエネルギーの変調が生成される、ビームトラッキングのための2つの横の補正値および深さの補正値からなるベクトルまたは補正三重項(correction triplet)が、補正値として用いられる。さらに補正値の決定において、他のラスターポイントの照射において、腫瘍組織3の個別のラスターポイントが、部分的な照射線量によって既に負荷されていることを考慮に入れることが必要である。その照射線量の寄与は、照射の進行の依存して異なっている。その場合のために、事前照射変数を補正値として用いることが必要である。
【0052】
ここに記載された方法を用いて、リファレンス状態を用いて評価された粒子ビームのためのパラメータを、記憶することが可能となる。さらに、一方で動きに関係し、他方で事前照射に関係する補正値を含む数値テーブルが、記憶デバイスに記憶される。
【0053】
粒子ビーム5を用いた患者における腫瘍組織3の照射のためのデバイス1のスキャンされた粒子ビームに対する、実際の照射の前に同様に連続して関連した、照射計画のプロセスは、以下のステップを含む:
【0054】
照射線量計算のためのプロセスとして、患者における腫瘍組織の異なる位置は、動きのコースの間に、例えば患者の呼吸の間に検出される。このプロセス中の動きは、準静的に、好ましくは重なり合わない動きのフェーズに分割される。
【0055】
さらなるステップにおいて、計画された照射のための現在のラスターポイントの解剖学的位置は、リファレンス状態のラスターポイントと、現在のラスターポイントに関係した動きの状態との組合せから確認される。したがって、ラスターポイントと現在のラスターポイントの解剖学的な動きの状態との任意の組合せは、前述の変換手段により追跡される。
【0056】
ここで、リファレンス状態に基づいて決定されたラスターポイントと比較した現在のラスターポイントの偏差が存在し、現在のラスターポイントのために補正値が計算される。その補正値は、ベクトルまたは補正三重項として指定される。
【0057】
各々のラスターポイントのための補正値は、各々の動きの状態を結合して、表の形式で記憶デバイスに記憶される。また、補正値の設定のために、各々のラスターポイントのための動きの状態の可能な組合せが、記憶デバイスに記憶される。したがって、ここで確認された照射計画に基づいた照射において、補正値は、その後に観察された腫瘍組織の動きに基づいて適用することができる。
【0058】
各々のラスターポイントのために、他のラスターポイントの照射線量の累積は、動きのフェーズとラスターポイントの関連性との全ての組合せを取り入れることによって考慮することができる。事前照射変数の設定から、全ての可能性のある照射のコースを決定できる。照射計画のためのプロセスにおいて、また線量計算のためのプロセスにおいて、現在のラスターポイントの解剖学的位置は、4D−CTまたは4D−MRデバイス(4D磁気共鳴デバイス)を用いて決定することができる。解剖学的データは、したがって時間分解されたデータとして利用できる。
【0059】
ここで、線量計算のためのプロセスに関連して前述したとおり、部分的な照射線量が合計できる前に、部分的な照射線量のリファレンス状態への変換が必要である。
【図面の簡単な説明】
【0060】
【図1】患者における腫瘍組織の照射のためのデバイスの基本ダイアグラムである。
【図2】照射操作における動きの影響を図示するための、腫瘍の位置の基本ダイアグラムである。
【技術分野】
【0001】
説明
本発明は、請求項1の序文に従って、粒子ビームを用いた患者の、とくに患者における腫瘍の放射線照射のためのデバイスに関する。本発明はまた、請求項9に従って、照射操作の間の、患者の動きまたは患者の照射される範囲を補正する方法に関する。
【背景技術】
【0002】
ここに記載されている種類のデバイスは、既知である。それらは、患者における腫瘍組織の照射の間に、照射される標的範囲の動きを補正するために用いられる。照射されている腫瘍組織の動きは、とくに患者の呼吸の動きの間に生じる。腫瘍の累積照射線量への呼吸の動きの影響を最小限に抑えるため、標的の体積を通常は増加させ、このことは、健康な組織も照射されるため、患者にダメージを引き起こし得る。これは、副作用の確率を増加する。健康な組織へ適用される照射線量を低減するための提案が既になされている。一つの提案は、例えば、腹壁を圧迫すること、それにより患者の横隔膜の可動性を制限することによって、照射される腫瘍組織の動きの範囲を低減することである。他の可能性は、自然呼吸を高周波人工呼吸(ジェット換気)に置き換えることである。最終的に、呼吸を一定期間停止できる高酸素人口呼吸もまた、考慮すべきかもしれない。
【0003】
さらなる可能性は断続照射(開閉)であり、そこでは、患者が普通に呼吸をし、照射されている腫瘍組織が所望の位置にある特定の時間の間だけ腫瘍が照射される。その手順は、照射操作の継続が持続的に増加する結果を有する。
【0004】
放射線の照射線量を、一回だけでなく数サイクルにわたって適用することも可能である。その繰り返し照射(再スキャン)は、標的の容積の拡大を必要とする。腫瘍は動きの全ての状態において照射されることを必要とするため、標的の容積の拡大が必要である。これは結果的に、健康な組織も照射されるため、患者に対してダメージをもたらし得る。腫瘍の所望の照射線量負荷を達成するために、以下に記載されるように、干渉の平均が選ばれる。その方法では、腫瘍が、動きの全ての状態においてヒットされる必要があり、健康な組織の不必要な負荷の結果をもたらす。
【0005】
もし粒子ビームが、そのとき照射を受けている腫瘍組織の動きを追跡しない場合には、静的な照射と比較して、照射の結果に悪影響を与える差異が生じるということが見出されている。照射されている組織において、照射の進行および腫瘍の動きが互いに重ね合わされるため、照射されていない部位または2回以上照射されている部位が生じる。
【0006】
照射操作の間の腫瘍組織の位置の変化を補正することが可能な手段によって提供される制御手段を有する、腫瘍組織の照射に用いられるデバイスがまた、知られている(DE 1031071A1)。その処理において、適用される照射線量を理解するために、腫瘍の動きとの時間相関における照射操作の正確なコースを決定することが必要である。
【発明の開示】
【0007】
したがって本発明の目的は、照射手順と腫瘍の動きとの間に正確な時間相関を構成することを可能にするデバイスを提供することである。
【0008】
その問題を解決するために、請求項1に記載されている特徴を有するデバイスが提案される。本デバイスは、一般的な構成要素、すなわち、治療ビームといわれる各々のスライスのための所定の粒子エネルギーを有する粒子ビームを生成する加速器、および粒子ビームを互いに垂直である2方向に偏向させ、また腫瘍組織のスライス毎スキャン(slice-by-slice scanning)を可能な状態にするラスタースキャンデバイス(raster scanning device)を含む。本デバイスはまた、腫瘍組織の異なる深さで起こる粒子ビームのブラッグ最大(Bragg maximum)といわれる、加速エネルギーによって予め定められる最大照射線量負荷の範囲が、生体構造の変化に対して侵入深さを適合させるために素早く変更できるように、粒子ビームのエネルギーを変化させることができるモジュレータを有する。
【0009】
デバイスの検出手段は、腫瘍組織の位置および腫瘍組織の位置ずれを検出する働きをする。したがってそれは、腫瘍組織の位置の時間分解検出(time-resolved detection)を可能な状態とする。検出デバイスによって得られたデータが、第1の記憶デバイスへ伝達される。さらに、腫瘍の動きを、例えば、照射操作に先行して記録されたような患者の呼吸の動きを、記憶デバイス内に記憶することができる。腫瘍の動きが、例えば患者の呼吸の動きが、照射操作に先行して検出され、記憶デバイスに記憶される。そのようにして、照射操作の間に粒子ビームを偏向することが可能であるため、それは実質的に腫瘍組織の動きを追跡し、所要の特定の侵入深さをモジュレータを経由して適合させる。
【0010】
本発明のデバイスは、一方においては、照射のコースのデータを記録するモジュールを備えるという事実によって区別される。したがって、ラスタースキャンデバイスによって予め定められた粒子ビームの位置が、時間とともに検出され、可能な変調を含む粒子ビームのエネルギーもまた、照射のための加速手段によって提供される。したがって、粒子ビームのブラッグ最大がどの深さに存在するかを決定することが可能である。
【0011】
他方では、モジュールが、患者の照射の間に用いられる検出デバイスのデータを記録し、このデバイスは、照射を受けている腫瘍組織の位置を、時間とともに検出する。その配置においては、位置を、カメラ手段によって、例えば、照射を受けている患者の皮膚、照射操作の間に検出される動きに適用されるカラーマーカまたは光源、とくに発光ダイオードによって、間接的に決定することが可能である。他の可能性は、腫瘍位置の直接蛍光透視法検出または患者の表面の動きの検出である。
【0012】
したがって本デバイスは、照射操作の間に、正確な情報が、照射のコースおよび照射を受けている腫瘍組織の動きについて存在するという事実によって区別される。照射のコースと腫瘍組織の動きの間の間接的な関係は、モジュール内の相関ユニットによって記録される。相関ユニットのデータは、吸収量が腫瘍範囲またはラスターポイント(raster point)のどちらへ配分されたかについての情報を与える。
【0013】
さらなる進展は、従属項から明らかである。
この問題はまた、請求項9に与えられた特徴をによる、粒子ビームを用いた照射の間の、患者の動きまたは患者の照射範囲を補正する方法によって解決される。本方法においては、腫瘍組織は、記憶デバイス内に記憶されたデータを考慮しながら照射される。これらのデータは、実際の照射操作の前に連続して関連付けられている検出操作の間に検出デバイス手段によって得られ、そのデバイスは、腫瘍組織の位置の時間分解検出のため、すなわち腫瘍組織の動きの検出のために用いられている。
【0014】
照射操作の間の、照射のコースのデータは、モジュールに記録される。したがって、腫瘍組織のスライス毎スキャンは、ラスタースキャンデバイスおよび粒子ビームのエネルギーを用いて検出される。
【0015】
照射の間に、さらに腫瘍組織の現在位置が、時間とともにモジュールによって記録される。次に、照射のコースのデータおよび動きのコースのデータの相関関係によって、現在の腫瘍の位置と実際の照射のコースの関連付けが可能となる。したがって、腫瘍内の照射線量の累積を確認することができる。
【0016】
本方法のさらなる実施態様は、従属項から明らかである。
請求項1に記載のデバイスの操作および請求項9に記載の方法の実施に関連して、請求項12の特徴を有する照射線量の計算方法、および/または請求項15の特徴を有する照射計画の方法が、前述の問題を解決するために用いられる。
【0017】
本発明は、以下の図を参照して、さらに詳細に説明される:
図1は、粒子ビーム5を用いた腫瘍組織3のスライス毎照射のためのデバイス1の基本ダイアグラムを示し、これは、ここに概説のみされている加速器7によって提供される。加速器は、実際に照射されている層に必要なエネルギーを有する粒子を供給する。粒子ビーム5は、腫瘍組織3のスライス毎のスキャンをするために、水平方向および垂直方向の両方に、ラスタースキャンデバイス9を用いて偏向される。一例として、ラスタースキャンデバイス9には、その目的のために、第1の一対の磁石11および第2の一対の磁石13が備えられる。照射されるスライスは、加速器によって供給される粒子エネルギーによって、処置を施される。用いられる粒子は、好ましくは12C粒子である。
【0018】
ラスタースキャンデバイス9から発するビームは、例えばイオン化チャンバーのような、粒子カウンタ15を通して形成することができ、次にダウンビームに配置されたモジュレータ17の中を通り、その後に照射されている腫瘍組織3に到達する。矢印19によって示すように、後者は動くことができる。
【0019】
モジュレータ17は、互いに反対側に位置するくさび形の少なくとも2つのモジュレータプレート21、23を有することができ、これは好適な駆動部を用いて互いに近づきおよび離れることができ、その結果粒子ビーム5は、腫瘍組織3をヒットする前に、程度の差はあるが厚いモジュレータ材料の中を通る。好ましくは、モジュレータ17は、互いに近接して設置されている複数個のプレート21、21’、21’’など、および互いに近接して設置されているモジュレータプレート23、23’、23’’などを有し、ここで、互いに近接して設置されている各々のプレート21、21は第1駆動部25と関連し、互いに近接して設置されている各々のプレート23、23は第2駆動部27と関連し、これらの駆動部は駆動デバイス29の一部を形成する。その種類のモジュレータは既知であるため、それらについてのさらなる詳細はここに加えない。
【0020】
粒子ビーム5のエネルギーはモジュレータ17を用いて変調され、そのような手段により粒子ビームの方向に測定されたブラッグ最大の位置が変化し、とくに、例えば、呼吸の動きおよびそれによる患者における密度の変化という現象においてでさえ、そのような手段によって、侵入深さが変化されて所望の層にとどまる。
【0021】
したがって、ラスタースキャンデバイス9を用いて、腫瘍組織3はスライス毎にスキャンされ、すなわち、粒子ビームの粒子によって作用を受ける。モジュレータ17は、粒子ビーム5の方向に測定されたスキャンスライスの位置を、呼吸の動きの状態に適合させる働きをする。図1において、スライス3a、3bなどの番号は、腫瘍組織3の内部を示す。
【0022】
腫瘍の範囲に累積される粒子ビーム5の照射線量は、粒子ビーム5の中に存在する粒子の数に依存する。照射操作の間に、腫瘍組織3に作用する粒子の数は、粒子カウンタ15を用いて決定される。所望の粒子数に到達した場合、信号が、ライン31によって制御手段33へ伝達され、制御手段33はライン35を経由してラスタースキャンデバイス9に接続されている。所望の粒子数が粒子カウンタ15によって検出された場合、ラスタースキャンデバイス9の作動は、ライン35を経由して腫瘍組織3の内部の次のラスターポイントをアドレス指定する方法によって達成される。
【0023】
デバイス1はまた、検出デバイス37、ならびにライン41を経て検出デバイス37に、ライン43を経てモジュレータ17に、およびライン45を経てラスタースキャンデバイス9に接続されているモジュール39を含む。最後に、モジュール39は、ライン47を経て粒子カウンタ15に接続されている。
【0024】
特別な優先権が、例えば患者の呼吸の間の腫瘍組織の動きのコースの検出のために、蛍光透視法(fluoroscopy)システムまたはカメラシステムの方式の検出デバイスを有するデバイス1へ与えられている。
【0025】
図2は、腫瘍組織3の一部の基本ダイアグラムであり、2aの数字に従って左は、最初の位置であり、2bの数字に従って右は、例えば呼吸の動きが理由の2番目の傾いた位置である。
【0026】
腫瘍組織3が照射されていることが、図2aに示されているE1、E2およびE3平面などのグリッド形内の正方形によって示されている。平面内に存在する正方形は、個別のラスターポイントを示すことを目的としている。図2a内の腫瘍組織の部分は、ラスターポイントR1からR5を示す。
【0027】
平面Ex内のラスターポイントRxが、粒子ビーム5を用いた照射線量によって作用を受けていることが図2aから明らかである。ラスターポイントRxの左にあるラスターポイントR(x−1)、R(x−2)などからR3までは、部分的な照射線量によって同時にすでに作用を受けている。したがって、ラスターポイントにおいては、そこに位置するブラッグ最大のみならず、組織内のより深部にブラッグ最大の位置を有するビームもまた照射線量の累積にそれぞれ貢献する。
【0028】
図2bは、図2aに対して左回りに回転させた位置における、腫瘍組織3の部分要素を示す。同じリファレンス数字は、すでに図2aにおいて図示されている同じ要素を示すために用いられる。したがって、ここに示される腫瘍組織3の部分が、E1、E2、E3などの平面内に配列されているラスターポイント、平面E1内に位置するラスターポイントR1からR5を有することは明らかである。
【0029】
ビーム位置の変調によって、粒子ビーム5は、ラスターポイントRxを再びヒットする。腫瘍組織3は傾いているため、図2aとは異なり、粒子ビーム5は、互いに近接して位置しているラスターポイントの横列を通り抜けることができないが、異なる横列に位置するラスターポイントをヒットする。腫瘍組織3の部分の最上部の横列において、互いに近接して位置する4つのラスターポイント、すなわちラスターポイントR1およびその右に隣接する3つのラスターポイントがヒットされる。2番目の横列において、ラスターポイントR2から離れたラスターポイント、最終的に、平面E1内に位置するラスターポイントE3のような同一の横列内に位置するラスターポイントがヒットされる。
【0030】
ラスターポイントRyは、若干低い照射線量によって作用を受ける。その左に位置するラスターポイントは、低い照射線量で順番に照射される。粒子ビームのブラッグ最大がRx内に位置している粒子ビームによるラスターポイントRxの照射において、異なって配列されたラスターポイントが、照射線量によってすでに作用を受けていることは、図2aおよび2bから明らかである。互いのラスターポイントの異なる相対位置は、腫瘍の動きとの関連によって、ここに図示されているように、例えば回転の角度によってもたらされる。
【0031】
以下に、患者における腫瘍組織の照射のための図1に示されるデバイスの操作、および図1に記載のデバイスを用いた粒子ビームによる照射の間の、患者の動きまたは患者の照射範囲を補正する方法の詳細が加えられる。
【0032】
動きの間に、例えば患者が呼吸をしている場合に、患者における腫瘍組織3は、検出デバイス、例えば検出デバイス37を用いて検出される。動きのコースにおける腫瘍組織3の異なる位置はまた、動きを、準静的(quasi-static)、好ましくは動きの重なり合わないフェーズへ分解することよって検出することができる。したがって、腫瘍組織の動きの時間分解検出が起こる。
【0033】
照射に先行して、動きの検出は、好ましくは4D−CT(4Dコンピュータ断層撮影)として設計されたデバイスを用いることにより達成される。その中に生成される動きのフェーズ(movement phases)は、例えば患者の皮膚上のカラーポイントまたはそこに適用された光源を検出するビデオカメラを用いて、間接的に検出することができる。照射の間の動きの存在の状態を、次に、例えば4D−CTの動きのフェーズに関連付けることができる。しかしながら、好ましくは動きは、表面検出のための蛍光透視法システムまたはカメラシステム方式の検出デバイスを用いて検出される。したがって、照射手順の間の腫瘍組織の局所的位置は、連続的にまたは時間内のある特定の点で決定することができる。
【0034】
異なる動きのフェーズのこれらのデータは、図1中には示されていない第1記憶デバイス内に記憶される。
照射操作の間、腫瘍の動きは、検出システムによって動きのフェーズに関係づけられる。第1記録デバイスからのデータを用いたモジュール39における補正は、ラスタースキャンデバイス9およびモジュレータ17を制御するために用いられ、その結果、粒子ビーム7が、異なる動きのフェーズにおける腫瘍組織3に、計画通りに照射される。
【0035】
したがって、これらのデータは、ラスタースキャンデバイス9を制御するために用いられるため、動きの間でさえ、腫瘍組織3のスライス毎スキャンが起こる。
腫瘍組織内の粒子ビーム5の侵入深さ、すなわち粒子ビームのブラッグ最大が位置する腫瘍組織3内の平面3a、3bなどは、駆動部25および27を用いて、程度の差はあるが互いの方向へ移動されるモジュレータプレート21、21’、21’’および23、23’、23’’などの、モジュレータ17の作動によって設定される。
【0036】
腫瘍組織3内のラスターポイントの照射の間に、粒子ビーム5の粒子数は、例えばイオン化チャンバーの方式の粒子カウンタ15を用いて決定される。ラスターポイントにおいて所望の粒子数に達した場合、ラスタースキャンデバイス9が、次のラスターポイントが照射される方法により作動される。照射スキャンの間に、患者または腫瘍組織3の現実の位置が、検出デバイス37を用いた時間分解法により検出される。例えばビデオカメラを用いた間接的検出、または例えば蛍光透視システムもしくはカメラシステムを手段とした直接的検出を、ここで実施することが可能である。
【0037】
一方では、モジュール39は、腫瘍組織3内のラスターポイントおよびそこへ照射された吸収量を時間とともに検出することによって、現在進行中の照射操作を検出する。そのようにして、腫瘍組織3のどのラスターポイントが、時間内にどの程度の照射線量でどのポイントが照射されているかを正確に知ることができる。反対に、照射操作によって到達したラスターポイント毎の照射された吸収量をまた、決定できる。
【0038】
一方で、照射の間の腫瘍組織3の動きは、モジュール39を用いることによって決定される。その結果、時間内のある特定の点の照射線量によって、患者の身体内の実際のラスターポイントが作用を受けているかどうかを知ることができる。
【0039】
照射操作に関連するデータ、および照射操作の間に生じる腫瘍組織3の動きは、患者の身体内のラスターポイントにおける照射線量についての前記情報を決定できるように、互いを用いて補正することができる。
【0040】
補正によって得られた情報は、ここには示されていない第2記憶デバイスに記憶することができる。もし、第1記憶デバイスが適切に形成されている場合、それらのデータはまた、そこへ記憶することもできる。それらは、照射のプロトコルへ伝達され、そのプロトコルは照射後に評価される。そのようにして、照射結果を評価することが可能となる。例えば、腫瘍のラスターポイントが、低すぎる照射線量で照射されているどうかについて、確認することが可能である。
【0041】
一般的に、複数の治療部分が、またの名を画分が、腫瘍組織の治療のために提供される。プロトコル内に策定されたデータに基づいて、次の照射における腫瘍組織のラスターポイントのため選択される照射線量を、もう一度決定することができる。
【0042】
とくに好ましくは、モジュール39のデータの補正によって得られた情報は、進行中の照射操作の調整に用いることができる。したがって、標的範囲が動いている場合に、腫瘍組織3の方へ向けられたラスタースキャンデバイス9によって方向付けされた粒子ビーム5の照射線量を適合することが可能である。照射操作において、腫瘍組織の個別のラスターポイントは、粒子ビームによって作用を受ける。さらなるラスターポイントの照射の前に、次のラスターポイントのために用いる照射線量を決定することが、モジュール39内に存在するデータに基づいて可能である。そうすることで、前回のラスターポイントの照射の間の部分的な照射によって、すでに作用を受けているラスターポイントかどうかを検討事項へ取り入れることが可能である(図2参照)。そのような場合、次に、以前に照射されたのラスターポイントのための照射線量が適合される。しかしながら、そのような適合は、加えるべき照射線量の増加、または減少をも結果としてもたらすかもしれない。
【0043】
デバイス1の処理において、モジュール39内に存在する照射操作に関係するデータおよび患者の動きに関係するデータは、相互に関連づけられ、およびそれらから得られる情報は、ラスタースキャンデバイス9およびモジュレータ17を直接的に操作するために用いられる。
【0044】
好ましくは、腫瘍組織の可能性のある動きのフェーズは、照射操作に先行して、検出および記憶される。粒子ビーム5の腫瘍組織の特定のラスターポイントへの導入に先行して、記憶デバイスからの取り出した補正値を手段として、次のラスターポイントのための照射線量のみならず、ビーム位置の補正およびモジュレータの設定の必要性を決定することが可能となる。
【0045】
モジュール39のラスタースキャンデバイス9およびモジュレータ17への接続を用いて、照射操作の間の腫瘍組織の動きが補正されるため、粒子ビームを用いる患者における腫瘍組織の照射の方法を大幅に向上させる制御回路が形成される。
ここに記載されたデバイス1を用いた患者における腫瘍組織3の照射が急に増加すると、線量計算および照射計画のためのプロセスが実行される。
【0046】
スキャンされた粒子ビームのための照射線量の計算のためのプロセスにおいて、照射されている腫瘍組織の異なる位置が患者内に検出される。それに応じて、例えば患者の呼吸のために、照射操作の間に静止していない動いている患者における腫瘍への照射を可能とするために、腫瘍組織3の動きのコースが確認される。
【0047】
腫瘍組織の動きは、好ましくは互いに重なり合わない、準静的な動きのフェーズへ分割される。したがって動きは、連続的に記録されるのではなく、個別の分離した動きのフェーズに関連して記憶される。
【0048】
各々の動きのフェーズのために、部分的な照射計画が設定され、ここで、粒子ビーム5を用いて腫瘍組織3がスキャンされるの間の動きのフェーズのための照射線量が部分的照射計画から計算され、動きのフェーズが評価される。したがって、各々の動きのフェーズのために、部分的照射計画および部分的照射線量の両方が得られる。
【0049】
異なる動きのフェーズにおける解剖学的な構造は、動きが理由で、正確に同じ位置に存在するとは限らない。動きのフェーズ毎の個別の照射線量は、すなわち部分的な照射線量は、したがって簡単には合計することができない。動きのフェーズを用いて評価した部分的な照射線量を、解剖学的な動き考慮に入れたリファレンス状態へ変換することが必要である。
その変換をして初めて、部分的な照射線量を全体の照射線量へ合計することが可能となる。
【0050】
照射操作の間のブラッグ最大の位置を決定できるようにするために、ブラッグ最大が、リファレンス状態から補正値を用いた他のフェーズに変換されることが必要である。これは、ここに示されていないコンピュータ要素によって確保される。
【0051】
その手順において、腫瘍組織3の動きに起因する最初の補正値を考慮に入れることが必要である。その場合、所要のエネルギーの変調が生成される、ビームトラッキングのための2つの横の補正値および深さの補正値からなるベクトルまたは補正三重項(correction triplet)が、補正値として用いられる。さらに補正値の決定において、他のラスターポイントの照射において、腫瘍組織3の個別のラスターポイントが、部分的な照射線量によって既に負荷されていることを考慮に入れることが必要である。その照射線量の寄与は、照射の進行の依存して異なっている。その場合のために、事前照射変数を補正値として用いることが必要である。
【0052】
ここに記載された方法を用いて、リファレンス状態を用いて評価された粒子ビームのためのパラメータを、記憶することが可能となる。さらに、一方で動きに関係し、他方で事前照射に関係する補正値を含む数値テーブルが、記憶デバイスに記憶される。
【0053】
粒子ビーム5を用いた患者における腫瘍組織3の照射のためのデバイス1のスキャンされた粒子ビームに対する、実際の照射の前に同様に連続して関連した、照射計画のプロセスは、以下のステップを含む:
【0054】
照射線量計算のためのプロセスとして、患者における腫瘍組織の異なる位置は、動きのコースの間に、例えば患者の呼吸の間に検出される。このプロセス中の動きは、準静的に、好ましくは重なり合わない動きのフェーズに分割される。
【0055】
さらなるステップにおいて、計画された照射のための現在のラスターポイントの解剖学的位置は、リファレンス状態のラスターポイントと、現在のラスターポイントに関係した動きの状態との組合せから確認される。したがって、ラスターポイントと現在のラスターポイントの解剖学的な動きの状態との任意の組合せは、前述の変換手段により追跡される。
【0056】
ここで、リファレンス状態に基づいて決定されたラスターポイントと比較した現在のラスターポイントの偏差が存在し、現在のラスターポイントのために補正値が計算される。その補正値は、ベクトルまたは補正三重項として指定される。
【0057】
各々のラスターポイントのための補正値は、各々の動きの状態を結合して、表の形式で記憶デバイスに記憶される。また、補正値の設定のために、各々のラスターポイントのための動きの状態の可能な組合せが、記憶デバイスに記憶される。したがって、ここで確認された照射計画に基づいた照射において、補正値は、その後に観察された腫瘍組織の動きに基づいて適用することができる。
【0058】
各々のラスターポイントのために、他のラスターポイントの照射線量の累積は、動きのフェーズとラスターポイントの関連性との全ての組合せを取り入れることによって考慮することができる。事前照射変数の設定から、全ての可能性のある照射のコースを決定できる。照射計画のためのプロセスにおいて、また線量計算のためのプロセスにおいて、現在のラスターポイントの解剖学的位置は、4D−CTまたは4D−MRデバイス(4D磁気共鳴デバイス)を用いて決定することができる。解剖学的データは、したがって時間分解されたデータとして利用できる。
【0059】
ここで、線量計算のためのプロセスに関連して前述したとおり、部分的な照射線量が合計できる前に、部分的な照射線量のリファレンス状態への変換が必要である。
【図面の簡単な説明】
【0060】
【図1】患者における腫瘍組織の照射のためのデバイスの基本ダイアグラムである。
【図2】照射操作における動きの影響を図示するための、腫瘍の位置の基本ダイアグラムである。
【特許請求の範囲】
【請求項1】
−各スライスに対する所定のエネルギーを備えた粒子ビーム(5)を生成するための加速器(7)、
−粒子ビーム(5)に作用する、腫瘍組織(3)のスライス毎スキャンのためのラスタースキャンデバイス(9)、
−粒子ビーム(5)のエネルギーを調整するためのモジュレータ(17)、
−腫瘍組織(3)の位置の時間分解検出のための検出デバイス(37)、
−照射操作に先行して決定される腫瘍組織(3)に関するデータを記憶するため、および該データをラスタースキャンデバイス(9)およびモジュレータ(17)へ送るための第1の記憶デバイス、
を有する、粒子ビームを用いた患者における腫瘍組織(3)のスライス毎照射用デバイスであって、
−照射操作の間に、照射のコースのデータおよび検出デバイス(37)のデータを記録するモジュール(39)、および
−照射のコースのデータおよび検出デバイス(37)のデータを、時間関係でともに配置する相関ユニット、
を有することを特徴とする、前記スライス毎照射用デバイス。
【請求項2】
モジュール(39)によって記録されたデータを記憶する第2の記憶デバイスを備えることを特徴とする、請求項1に記載のデバイス。
【請求項3】
ラスタースキャンデバイス(9)と関連付けられている粒子カウンタ(15)を特徴とする、請求項1または2に記載のデバイス。
【請求項4】
モジュール(39)が、ラスタースキャンデバイス(9)および/またはモジュレータ(17)と接続され、制御回路を形成していることを特徴とする、請求項1〜3のいずれかに記載のデバイス。
【請求項5】
第1の記憶デバイスが、異なる腫瘍位置に関するデータを含むことを特徴とする、請求項1〜4のいずれかに記載のデバイス。
【請求項6】
現在の照射コースと記憶された照射データとを比較する比較デバイスを特徴とする、請求項1〜5のいずれかに記載のデバイス。
【請求項7】
補正値を与えるコンピュータ要素を特徴とする、請求項1〜6のいずれかに記載のデバイス。
【請求項8】
検出デバイスが、蛍光透視法システムまたはカメラシステムであることを特徴とする、請求項1〜7のいずれかに記載のデバイス。
【請求項9】
腫瘍組織のスライス毎スキャンのためのラスタースキャンデバイスおよび粒子ビームのエネルギーを調整するためのモジュレータを含むデバイスを用いた、とくに請求項1〜8のいずれかに記載のデバイスを用いた粒子ビームの照射の間において、患者の動きまたは患者の照射範囲を補正する方法であって、該方法が以下のステップ:
−照射されている腫瘍組織の現在の位置の経時的な検出、
−記憶デバイスに記憶されたデータ/仕様に基づく腫瘍組織の照射、
−照射のコースのデータのモジュールへの記録、
−照射の間の現在の腫瘍組織の位置の経時的なモジュールへの記録、および
−現在の腫瘍位置と現在の照射のコースとの関連付け、
を含む、前記方法。
【請求項10】
モジュール内の得られたデータが、記憶されることを特徴とする、請求項9に記載の方法。
【請求項11】
効果的な制御のために得られたデータが、ラスタースキャンデバイスおよび/またはモジュレータを操作するために用いられることを特徴とする、請求項9または10に記載の方法。
【請求項12】
患者における腫瘍組織の粒子ビームを用いた照射のためのデバイスのスキャンされた粒子ビームの線量計算の方法であって、以下のステップ:
−動きのコースの間の腫瘍組織の異なる位置の検出、
−動きの、好ましくは互いに重なり合わない準静的な動きのフェーズへの分割、
−動きのフェーズ毎のリファレンス照射計画の部分的照射計画、部分的照射計画および関連した動きのフェーズから計算される動きのフェーズのための照射線量の確立、
−動きのフェーズに対応する、動きのフェーズに関連した部分的照射線量のリファレンス状態への変換、および
−個別の照射線量の全体の照射線量への合計、
をふくむ、前記方法。
【請求項13】
照射の間に、リファレンス状態からのブラッグ最大が、他のフェーズ内の補正値を用いて変換されることを特徴とする、請求項12に記載の方法。
【請求項14】
事前照射を考慮した動きおよび/または事前照射変数を補正するためのベクトルまたは補正三重項を補正値として用いることを特徴とする、請求項13に記載の方法。
【請求項15】
粒子ビームを用いた患者における腫瘍組織の照射のためのデバイスのスキャンされた粒子ビームの照射計画の方法であって、以下のステップ:
−動きのコースの間の腫瘍組織の異なる位置の検出、
−動きの、好ましくは重なり合わない準静的な動きのフェーズへの分割、
−動きのフェーズおよび計画された照射の時間的経過に基づき、個別の動きのフェーズを部分的照射計画のラスターポイントと関連付けること、
−動きのフェーズの部分的照射線量の計算、
−部分的照射線量のリファレンス状態への変換、
−部分的照射線量の合計、
−リファレンス状態のラスターポイントと現在のラスターポイントに関連した動きの状態との組み合わせから計画された照射のための、現在のラスターポイントの解剖学的位置の決定、
−現在のラスターポイントのための一連の補正値の計算、および
−記憶デバイスに記憶されたテーブル内の動きの状態に従った一連の補正値の記憶、
を含む、前記方法。
【請求項16】
照射されている腫瘍組織の動きを考慮した第1の補正値三重項、およびそれに加えて腫瘍組織のラスターポイントの事前照射を考慮した第2の補正値を、一連の補正値として計算することを特徴とする、請求項15に記載の方法。
【請求項17】
第2の一連の補正値が、動きの状態と照射のコースとの全ての可能な組み合わせのために計算されることを特徴とする、請求項15または16に記載の方法。
【請求項18】
現在のラスターポイントの解剖学的な位置が、4D−CTまたは4D−MRデバイスを用いて決定されることを特徴とする、請求項15〜17のいずれかに記載の方法。
【請求項1】
−各スライスに対する所定のエネルギーを備えた粒子ビーム(5)を生成するための加速器(7)、
−粒子ビーム(5)に作用する、腫瘍組織(3)のスライス毎スキャンのためのラスタースキャンデバイス(9)、
−粒子ビーム(5)のエネルギーを調整するためのモジュレータ(17)、
−腫瘍組織(3)の位置の時間分解検出のための検出デバイス(37)、
−照射操作に先行して決定される腫瘍組織(3)に関するデータを記憶するため、および該データをラスタースキャンデバイス(9)およびモジュレータ(17)へ送るための第1の記憶デバイス、
を有する、粒子ビームを用いた患者における腫瘍組織(3)のスライス毎照射用デバイスであって、
−照射操作の間に、照射のコースのデータおよび検出デバイス(37)のデータを記録するモジュール(39)、および
−照射のコースのデータおよび検出デバイス(37)のデータを、時間関係でともに配置する相関ユニット、
を有することを特徴とする、前記スライス毎照射用デバイス。
【請求項2】
モジュール(39)によって記録されたデータを記憶する第2の記憶デバイスを備えることを特徴とする、請求項1に記載のデバイス。
【請求項3】
ラスタースキャンデバイス(9)と関連付けられている粒子カウンタ(15)を特徴とする、請求項1または2に記載のデバイス。
【請求項4】
モジュール(39)が、ラスタースキャンデバイス(9)および/またはモジュレータ(17)と接続され、制御回路を形成していることを特徴とする、請求項1〜3のいずれかに記載のデバイス。
【請求項5】
第1の記憶デバイスが、異なる腫瘍位置に関するデータを含むことを特徴とする、請求項1〜4のいずれかに記載のデバイス。
【請求項6】
現在の照射コースと記憶された照射データとを比較する比較デバイスを特徴とする、請求項1〜5のいずれかに記載のデバイス。
【請求項7】
補正値を与えるコンピュータ要素を特徴とする、請求項1〜6のいずれかに記載のデバイス。
【請求項8】
検出デバイスが、蛍光透視法システムまたはカメラシステムであることを特徴とする、請求項1〜7のいずれかに記載のデバイス。
【請求項9】
腫瘍組織のスライス毎スキャンのためのラスタースキャンデバイスおよび粒子ビームのエネルギーを調整するためのモジュレータを含むデバイスを用いた、とくに請求項1〜8のいずれかに記載のデバイスを用いた粒子ビームの照射の間において、患者の動きまたは患者の照射範囲を補正する方法であって、該方法が以下のステップ:
−照射されている腫瘍組織の現在の位置の経時的な検出、
−記憶デバイスに記憶されたデータ/仕様に基づく腫瘍組織の照射、
−照射のコースのデータのモジュールへの記録、
−照射の間の現在の腫瘍組織の位置の経時的なモジュールへの記録、および
−現在の腫瘍位置と現在の照射のコースとの関連付け、
を含む、前記方法。
【請求項10】
モジュール内の得られたデータが、記憶されることを特徴とする、請求項9に記載の方法。
【請求項11】
効果的な制御のために得られたデータが、ラスタースキャンデバイスおよび/またはモジュレータを操作するために用いられることを特徴とする、請求項9または10に記載の方法。
【請求項12】
患者における腫瘍組織の粒子ビームを用いた照射のためのデバイスのスキャンされた粒子ビームの線量計算の方法であって、以下のステップ:
−動きのコースの間の腫瘍組織の異なる位置の検出、
−動きの、好ましくは互いに重なり合わない準静的な動きのフェーズへの分割、
−動きのフェーズ毎のリファレンス照射計画の部分的照射計画、部分的照射計画および関連した動きのフェーズから計算される動きのフェーズのための照射線量の確立、
−動きのフェーズに対応する、動きのフェーズに関連した部分的照射線量のリファレンス状態への変換、および
−個別の照射線量の全体の照射線量への合計、
をふくむ、前記方法。
【請求項13】
照射の間に、リファレンス状態からのブラッグ最大が、他のフェーズ内の補正値を用いて変換されることを特徴とする、請求項12に記載の方法。
【請求項14】
事前照射を考慮した動きおよび/または事前照射変数を補正するためのベクトルまたは補正三重項を補正値として用いることを特徴とする、請求項13に記載の方法。
【請求項15】
粒子ビームを用いた患者における腫瘍組織の照射のためのデバイスのスキャンされた粒子ビームの照射計画の方法であって、以下のステップ:
−動きのコースの間の腫瘍組織の異なる位置の検出、
−動きの、好ましくは重なり合わない準静的な動きのフェーズへの分割、
−動きのフェーズおよび計画された照射の時間的経過に基づき、個別の動きのフェーズを部分的照射計画のラスターポイントと関連付けること、
−動きのフェーズの部分的照射線量の計算、
−部分的照射線量のリファレンス状態への変換、
−部分的照射線量の合計、
−リファレンス状態のラスターポイントと現在のラスターポイントに関連した動きの状態との組み合わせから計画された照射のための、現在のラスターポイントの解剖学的位置の決定、
−現在のラスターポイントのための一連の補正値の計算、および
−記憶デバイスに記憶されたテーブル内の動きの状態に従った一連の補正値の記憶、
を含む、前記方法。
【請求項16】
照射されている腫瘍組織の動きを考慮した第1の補正値三重項、およびそれに加えて腫瘍組織のラスターポイントの事前照射を考慮した第2の補正値を、一連の補正値として計算することを特徴とする、請求項15に記載の方法。
【請求項17】
第2の一連の補正値が、動きの状態と照射のコースとの全ての可能な組み合わせのために計算されることを特徴とする、請求項15または16に記載の方法。
【請求項18】
現在のラスターポイントの解剖学的な位置が、4D−CTまたは4D−MRデバイスを用いて決定されることを特徴とする、請求項15〜17のいずれかに記載の方法。
【図1】

【図2】
【図2】
【公表番号】特表2009−520532(P2009−520532A)
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2008−546191(P2008−546191)
【出願日】平成18年12月8日(2006.12.8)
【国際出願番号】PCT/EP2006/011799
【国際公開番号】WO2007/079854
【国際公開日】平成19年7月19日(2007.7.19)
【出願人】(504343177)ゲーエスイー ヘルムホルツツェントルム フュア シュヴェアイオーネンフォルシュング ゲーエムベーハー (8)
【住所又は居所原語表記】Planckstr. 1, D−64291 Darmstadt, Germany
【Fターム(参考)】
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成18年12月8日(2006.12.8)
【国際出願番号】PCT/EP2006/011799
【国際公開番号】WO2007/079854
【国際公開日】平成19年7月19日(2007.7.19)
【出願人】(504343177)ゲーエスイー ヘルムホルツツェントルム フュア シュヴェアイオーネンフォルシュング ゲーエムベーハー (8)
【住所又は居所原語表記】Planckstr. 1, D−64291 Darmstadt, Germany
【Fターム(参考)】
[ Back to top ]