
粒子及び液滴の形状・径と温度との同時計測システム並びにそのプログラム
【課題】微粉炭等の固体の燃料粒子のみならず、液体の燃料液滴の燃焼場における挙動を把握するための基礎データを得るべく粒子または液滴の形状・径と温度との同時計測システムを提供する。
【解決手段】2本のレーザー光L1,L2の交差点に形成される測定領域を通過する火炎B中の粒子Pでレーザー光L1,L2が遮光されることにより形成される影に基づく粒子Pの形状をシャドウドップラー光学系Iを介して撮影するとともに、粒子Pの形状を表す画像信号を送出する高速度カメラ5と、カセグレン光学系IIを介して得られる測定領域中の粒子Pによる特定波長の2種類の光強度Iλ1,Iλ2をそれぞれ表す発光信号を送出する分光器8と、前記画像信号を処理して粒子Pの全部が高速度カメラ5の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により粒子Pの温度を演算するパソコン6とを有する。
【解決手段】2本のレーザー光L1,L2の交差点に形成される測定領域を通過する火炎B中の粒子Pでレーザー光L1,L2が遮光されることにより形成される影に基づく粒子Pの形状をシャドウドップラー光学系Iを介して撮影するとともに、粒子Pの形状を表す画像信号を送出する高速度カメラ5と、カセグレン光学系IIを介して得られる測定領域中の粒子Pによる特定波長の2種類の光強度Iλ1,Iλ2をそれぞれ表す発光信号を送出する分光器8と、前記画像信号を処理して粒子Pの全部が高速度カメラ5の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により粒子Pの温度を演算するパソコン6とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は粒子及び液滴の形状・径と温度との同時計測システム並びにそのプログラムに関し、特に固体の燃料粒子や液体の燃料液滴の燃焼場内における形状・径と温度とを同時に計測する場合に適用して有用なものである。
【背景技術】
【0002】
埋蔵量が多く供給安定度が高い石炭は火力発電の燃料として汎用されているが、その利用に当たっては環境汚染物質の排出量の抑制や資源の有効活用のため、低NOx燃焼技術の開発等、燃焼技術のより一層の高度化が求められている。
【0003】
現在、最も一般的に用いられている石炭の利用技術は、石炭を平均径40μm程度に粉砕すると共に空気搬送し、バーナーで燃焼させる微粉炭燃焼方式である。かかる微粉炭燃焼方式では、微粉炭粒子が乱流場において空気と混合・燃焼する過程がNOxの排出量や燃焼効率に大きく影響するため、高温の乱流場における微粉炭粒子の挙動を正確に把握することが極めて重要となる。ここで、微粉炭粒子の平均径は40μm程度であるが、実際、火炉に供給される微粉炭はその径が数μmから100μm程度と広い分布を有する。一方、微粉炭の温度上昇は、径が小さいほど上昇速度が大きくなる。そこで、高温の乱流場における微粉炭粒子の挙動を正確に把握するには、微粉炭粒子の径と温度との関係を把握することが肝要である。すなわち、どの程度の径の微粉炭粒子が、どの程度の温度になっているかを知ることがNOxの排出量の低減や、燃焼効率の向上等を図る上で非常に重要になってくる。
【0004】
しかしながら、現状では微粉炭等の粒子の形状・径と温度とを同時計測するシステムは存在せず、石炭の燃焼に関連してその着火、燃焼性を評価する装置として特許文献1が存在するだけである。
【0005】
なお、形状・径と温度とを同時に計測することは、微粉炭等の固体の燃料粒子を対象物とする場合だけでなく、液体の燃料液滴を対象物とする場合にも同様に必要とされる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2927154号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上記従来技術に鑑み、微粉炭等の粒子、燃料液滴等、燃焼場における粒子や液滴のみならず、一般的に粒子や液滴の挙動を把握するための基礎データを得るべく粒子及び液滴の形状・径と温度との同時計測システム並びにそのプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成する本発明の第1の態様は、2本のレーザー光の交差点に形成される測定領域を通過する粒子または液滴で前記レーザー光が遮光されることにより形成される影に基づく前記粒子または液滴の形状を第1の光学系を介して撮影するとともに、前記粒子または液滴の形状を表す画像信号を送出する撮影手段と、第2の光学系を介して得られる前記測定領域中の粒子または液滴による複数の特定波長の光強度をそれぞれ表す発光信号を送出する温度計測手段と、前記画像信号を処理して前記粒子または液滴の全部が前記撮影手段の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により前記粒子または液滴の温度を演算する演算処理手段とを有することを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0009】
本発明の第2の態様は、第1の態様に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、前記第2の光学系はカセグレン光学系であることを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0010】
本発明の第3の態様は、第1または第2の態様に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、前記測定可能期間は、二次元平面の前記撮像画面を格子状のセルに分割して各セルにおける前記画像信号の輝度を検出し、4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間としたことを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0011】
本発明の第4の態様は、第3の態様に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、前記4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間であっても、前記内部のセルに複数の低輝度部分が不連続な領域として存在する場合には、前記測定可能期間から除外することを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0012】
本発明の第5の態様は、1ステップ分の前記画像信号及び前記発光信号を読込む処理と、読込んだ画像信号に基づき前記粒子または液滴の全部が前記撮影手段の撮像画像に取り込まれている期間である測定可能期間であるか否かを判定する判定処理と、判定処理の結果測定可能期間である場合には、前記粒子または液滴の形状・径を演算するとともに前記発光信号に基づき二色温度計の原理による前記粒子または液滴の温度の演算を行う演算処理とを電子計算機に行わせることを特徴とする粒子及び液滴の形状・径と温度との同時計測プログラムにある。
【発明の効果】
【0013】
本発明によれば、2本のレーザー光の交差点に形成される測定領域を撮影する撮影手段で、前記測定領域を通過する粒子または液滴の像の全部が前記撮影手段の撮像画面に取り込まれている期間である測定可能期間に、温度計測手段により前記粒子または液滴の温度を計測するようにしたので、粒子または液滴の形状・径と温度とを同時に計測することができる。
【0014】
この結果、前記粒子または液滴の燃焼場等における挙動を正確に把握することができる。このことにより、例えば燃焼場における固体の燃料粒子や液体の燃料液滴の燃焼の数値シミュレーションを行う場合等に有用な基礎データを容易且つ正確に得ることができる。
【図面の簡単な説明】
【0015】
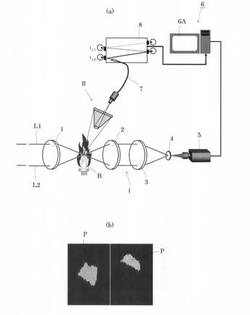
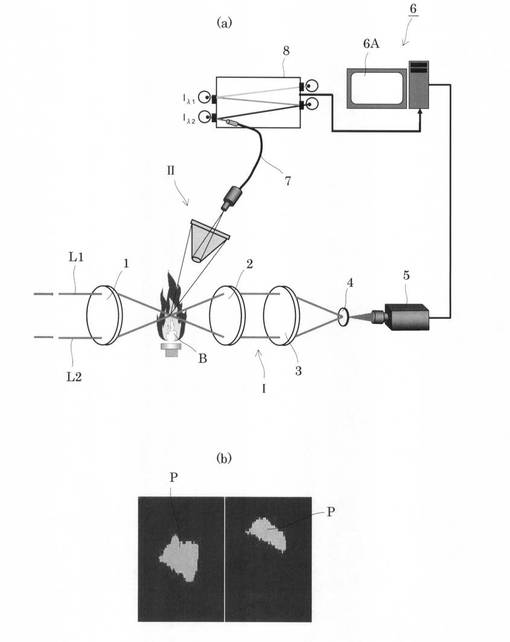
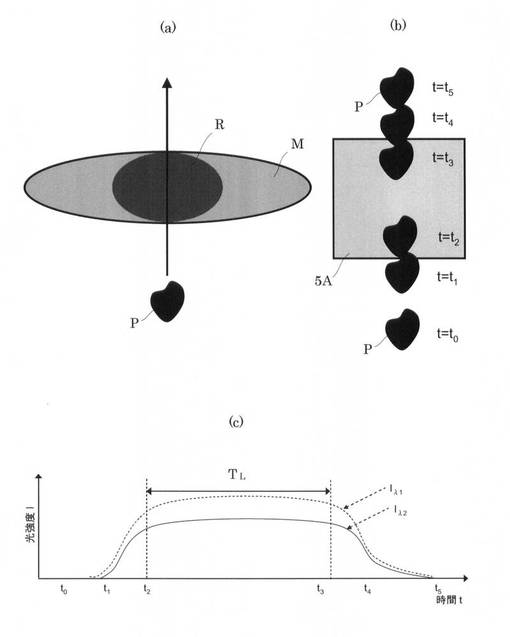
【図1】本発明の実施の形態に関する図で、(a)は実施の形態に係る粒子の形状・径と温度との同時計測システムを示すブロック線図、(b)は計測される粒子の形状の一例を模式的に示す説明図である。
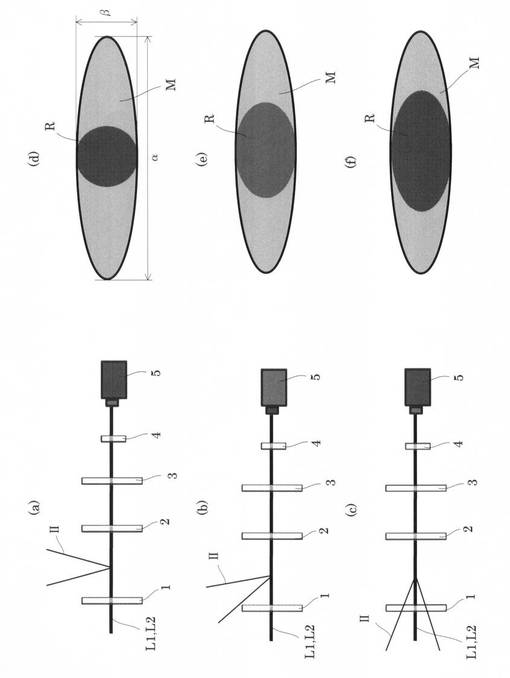
【図2】図1に示すシステムにおける光学系の構成例と測定・受光領域との関係を示す説明図である。
【図3】図1に示すシステムにおける粒子の形状・径と温度との測定原理を説明するための説明図である。
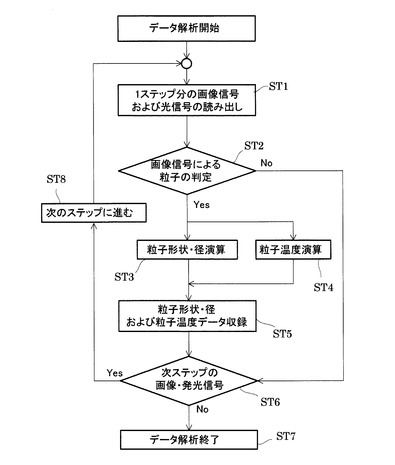
【図4】本発明の実施の形態に係る粒子の形状・径と温度との同時計測のフローを示すフローチャートである。
【図5】本発明の実施の形態における単一粒子の粒子像判別方法を示す説明図である。
【図6】本発明の実施の形態における複数の粒子が撮像領域内に存在する場合の粒子判別手法を示す説明図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態を詳細に説明する。なお、図1〜図6中の同一部分には同一番号を付し、重複する説明は省略する。また、本形態は微粉炭火炎内の粒子を計測対象とした場合である。
【0017】
図1(a)は本発明の実施の形態に係る粒子の形状・径と温度との同時計測システムを示すブロック線図である。同図に示すように、本形態において粒子の形状・径の計測系はシャドウドップラー光学系を利用して構成されている。このシャドウドップラー光学系Iではレーザー光源(図示せず)から出射されたレーザー光をビームスプリッタ(図示せず)で等しい強度をもつ平行な2本のレーザー光L1,L2に分離し、このレーザー光L1,L2を集光レンズ1を介して燃焼場の火炎B内で交差させる。このときの火炎Bは固体燃料(例えば微粉炭)の燃焼により形成されるもので、この火炎B中におけるレーザー光L1,L2の交差点が測定領域となる。交差した後のレーザー光L1,L2はコリメートレンズ2でコリメートされた後、集光レンズ3で集光され、対物レンズ4を介して撮像手段である高速度カメラ5に入射される。かくして高速度カメラ5では火炎B内の交差点に形成された測定領域の画像が撮影される。したがって、火炎B内の測定領域に燃焼に伴う粒子が存在する場合、その影として図1(b)に示すような粒子Pの形状が撮影される。高速度カメラ5では撮影した粒子Pの形状を表す画像信号を演算処理手段であるパーソナルコンピュータ(以下、パソコンという)6に送出する。パソコン6では、粒子Pの画像信号を所定の処理手順に基づき処理することにより粒子Pの形状及び径を計測する。かかる計測に伴う具体的な処理手順に関しては後に詳述する。
【0018】
一方、粒子Pの温度を計測する温度計測系は、燃焼場における粒子Pの局所的な発光を検出するのに最適なカセグレン光学系IIを利用して構成されている。カセグレン光学系IIで検出した火炎Bの前記測定領域における局所の発光データは、光ファイバー7を介して分光器8に入力される。分光器8では前記発光データのうち特定の2種類の波長λ1、λ2の光の光強度Iλ1、Iλ2を検出し、各光強度Iλ1、Iλ2を表す発光信号をパソコン6に入力する。パソコン6では、いわゆる二色温度計の原理に基づく次式(1)の演算を行うことにより測定領域の局所の温度を演算する。なお、式(1)は波長λ1、λ2の光強度Iλ1、Iλ2の比を表しているが、同式(1)中、温度T以外は、常数乃至既知であるので、光強度Iλ1、Iλ2を計測することで粒子Pの温度Tを演算により求めることができる。
【0019】
【数1】

【0020】
図2は図1に示すシステムにおける光学系の構成例と測定・受光領域との関係を示す説明図である。同図(a)、(b)、(c)は図1に示すシャドウドップラー光学系Iとカセグレン光学系IIとの位置関係を平面的に見た図である。図2(a)はレーザー光L1,L2が形成する交差点の測定領域に対してカセグレン光学系IIを直角に臨ませた場合である。この場合は図2(d)に示すように、楕円形状のシャドウドップラー光学系Iの測定領域Mに対し、その中央部に円形のカセグレン光学系IIによる受光領域Rが形成される。図2(b)はレーザー光L1,L2が形成する交差点の測定領域に対してカセグレン光学系IIを直角方向に対し傾斜させて臨ませた場合である。この場合は図2(e)に示すように、シャドウドップラー光学系Iの測定領域Mに対し、その中央部に長軸が左右方向に若干広がる楕円形のカセグレン光学系IIによる受光領域Rが形成される。図2(c)はレーザー光L1,L2が形成する交差点の測定領域に対してカセグレン光学系IIを平行に臨ませた場合である。この場合は図2(f)に示すように、楕円形状のシャドウドップラー光学系Iの測定領域Mに対し、その中央部に長軸が左右方向に図2(e)の場合よりもさらに広がる楕円形のカセグレン光学系IIによる受光領域Rが形成される。すなわち、シャドウドップラー光学系Iに対してカセグレン光学系IIを図2(a)に示す状態から図2(c)に示す状態に向けて傾斜させるに伴い、測定領域M内に形成される受光領域Rの面積が漸増する。この結果、図2(c)に示す場合が最も多くの粒子Pを受光領域R内に捕捉することができる。したがって、空間分解能を上げて厳密な粒子Pの形状・径乃至温度のデータを得たい場合には図2(a)に示す配置が好適であり、例えば時系列的に粒子Pの形状・径や温度がどのように変化するかという多くのデータを得たい場合には図2(c)に示す配置が好適である。
【0021】
なお、測定領域Mは、一例を挙げれば、αが800μm程度、βが100〜200μm程度の極く微少な領域であり、受光領域Rは測定領域Mに内包されるさらに局所の領域である。
【0022】
図3は図1に示すシステムにおける粒子の形状・径と温度との測定原理を説明するための説明図である。同図に示すように、粒子Pの画像に欠けがない範囲で光強度Iλ1、Iλ2の比により局所の温度が求まる。さらに詳言すると、図3(a)に示すように、火炎B中の粒子Pが測定領域M内の受光領域Rを図中下から上へ移動した場合を考える。この場合、高速度カメラ5の撮像画面5Aに対する粒子Pの時系列的な位置関係は図3(b)に示すようになる。すなわち、時刻t0では撮像画面5Aの撮像領域外に在った粒子Pが時刻t1でその一部が撮像画面5Aの撮像領域内に入り、時刻t2で完全に入って時刻t3までこの状態が継続され、さらに時刻t4で一部が撮像領域から出て、時刻t5では完全に撮像画面5Aの撮像領域外に出てしまう。このときの時間tと分光器8を介して計測される粒子Pが発する光の強度Iとの関係は図3(c)に示すようになる。図3(c)を参照すれば明らかな通り、時刻t2〜時刻t3で粒子Pの全体からの発光信号が得られ、この期間が粒子Pの温度の測定可能期間TLであることが分る。
【0023】
また、高速度カメラ5で撮影した測定可能期間TLにおける粒子Pの形状を表す画像信号をパソコン6で処理することによりその形状及び径を計測することができる。かかる画像信号と二色温度計の原理に基づき演算される粒子Pの温度データとを対応させることにより所定の粒子Pの形状・径と温度との同時計測が可能となる。
【0024】
かかる粒子Pの形状・径と温度との同時計測は、例えば図4に示すような手順でパソコン6において実施される。図4は本発明の実施の形態に係る粒子Pの形状・径と温度との同時計測のフローを示すフローチャートである。
【0025】
本形態は、一定のサンプリング周期で高速度カメラ5により撮像した画像信号をパソコン6の記憶装置(図示せず)に予め記憶させておき、この記憶データを処理する場合である。そこで、データ解析開始と同時に1ステップ分の画像信号と発光信号とを読み出す(ステップST1参照)。
【0026】
次に、画像信号による粒子Pの画像を判定する(ステップST2参照)。すなわち、撮像画面5A内における粒子Pの画像の欠けの有無を判定し、欠けがない場合(図3(b)の時刻t2〜t3のように粒子Pの形状の全体が撮像画面5Aに含まれている場合)を粒子Pの形状・径が演算可能な場合であるとして粒子Pの形状・径の演算を行う(ステップST3参照)と同時に、そのときの粒子Pの温度の演算を行う(ステップST4参照)。その後、それぞれの演算結果を対応付け、粒子Pの形状・径及び温度のデータとして記憶装置に記憶させるとともに、パソコン6の表示部6Aに表示させる(ステップST5参照)。
【0027】
ステップ1の処理で、粒子Pが検出されないか、または検出されても欠けが存在すると判定された場合(図3(b)の時刻t0〜t1または時刻t4〜t5の場合)は次のステップの画像信号及び発光信号の存在の有無を判定する(ステップST6参照)。
【0028】
次のステップのデータがない場合は、データ解析を終了させ(ステップST7参照)、データがある場合は次のステップに進み(ステップST8参照)、ステップST1〜ステップST6の処理を繰り返す。
【0029】
上記ステップST2に示す画像信号による粒子像の判定処理は、具体的には図5または図6に示すような態様で行われる。本形態に係る粒子像の判定処理に関する具体的な処理手順を、その代表的な3種類の態様についてそれぞれ詳説する。
【0030】
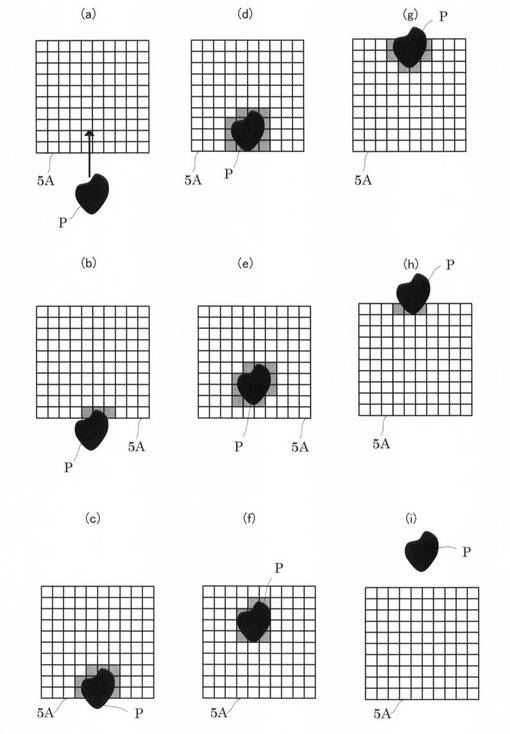
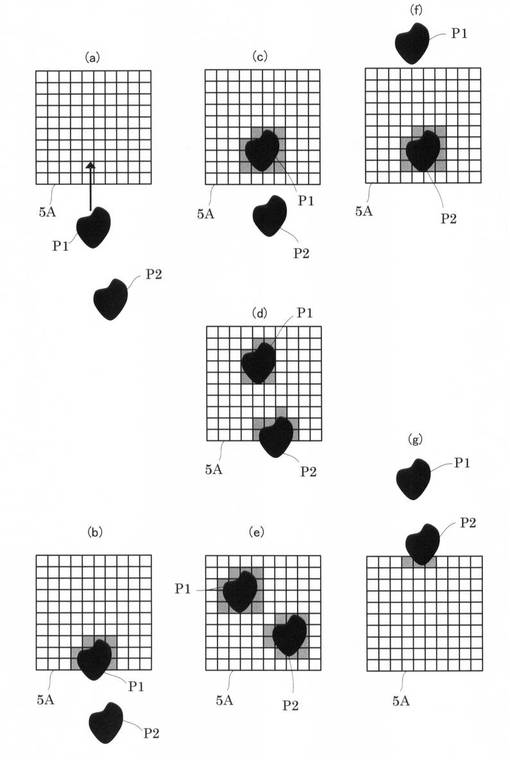
図5は単一粒子Pの、図6は複数粒子の粒子像判別方法を示す説明図である。両図には、撮像画面5Aの各セルを格子状に区切られた一つの矩形として模式的に示すとともに、粒子Pと撮像画面5Aとの位置関係を示している。
【0031】
ここで、各セルの輝度を次のように仮定する。
1) 特定のセルの全ての領域が粒子Pを検出していない場合、そのセルの輝度を100とする。
【0032】
2) 特定のセルの全ての領域が粒子Pで占められている場合、そのセルの輝度を0(図中5に黒塗り部として表記)とする。
【0033】
3) 粒子Pの輪郭部にあたるセルの輝度は、0を超え、100未満(図5中にグレー部部として表記)とする。
【0034】
<単一粒子の判別方法I>
本例は、単一の粒子Pが撮像画面5Aの下方から撮像画面5Aを通過して上方に抜ける場合である。
【0035】
a) 粒子Pが図5(a)に示す位置では、全セルの輝度が100であるので、粒子Pは未検出であり、計測不可と判定する。
【0036】
b) 粒子Pが図5(b)に示す位置では、一部のエッジのセルの輝度がグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0037】
c) 粒子Pが図5(c)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0038】
d) 粒子Pが図5(d)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0039】
e) 粒子Pが図5(e)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pが検出されている。しかも、エッジ部の全てのセルの輝度が100であるので、全部の形状が取り込まれている。そこで、かかる状態の画像信号に基づき粒子の形状・径を計測する。ここで、形状は、例えば図5(e)中のグレー領域の形状で近似的に求めることができる。また、径は、例えば輝度が0またはグレーとなっているセルの数に基づき演算により求めることができる。さらに詳言すると、例えば輝度が0のセルはその数を単純に加算するとともに、グレーのセルは各セルに関し輝度が100の場合の何%であるかを求め、その割合を係数として各セル毎に加算し、両者の合計の値に対し、セルの径(既知)を掛けてやれば良い。
【0040】
f) 粒子Pが図5(f)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pが検出されている。しかも、図5(e)と同様に、エッジ部の全てのセルの輝度が100であるので、全部の形状が取り込まれている。そこで、かかる状態の画像信号に基づき粒子Pの形状・径を計測する。
【0041】
g) 粒子Pが図5(g)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0042】
h) 粒子Pが図5(h)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、エッジの一部のセルの輝度が0またはグレーであり、エッジに粒子Pが存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0043】
i) 粒子Pが図5(i)に示す位置では、全セルの輝度が100であるので、粒子Pは未検出であり、計測不可と判定する。
【0044】
<単一粒子の判別方法II>
本例は、粒子Pが図5の紙面に対し直角に移動した場合である。この場合には粒子Pが撮像画面5Aに対して、(II−1)a)粒子Pなし、b)図5(e)または図5(f)に示す状態、c)粒子Pなしと変化する場合と、(II−2)a)粒子Pなし、b)図5(c)または図5(g)に示す状態、c)粒子Pなしと変化する場合とが考えられる。
【0045】
これらのうち、(II−1)に示す場合は、図5(e)または図5(f)に示す状態で、一部のセルの輝度が0またはグレーとなるので粒子Pが検出され、しかもエッジ部の全てのセルの輝度が100であるので、かかる状態の画像信号に基づき粒子Pの形状・径を計測する。
【0046】
一方、(II−2)に示す場合は、図5(c)または図5(g)に示す状態で、一部のセルの輝度が0またはグレーとなるので粒子Pが検出されるが、一部のエッジ部のセルの輝度が0またはグレーであり、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0047】
<複数の粒子の判別方法>
本例は、複数の粒子Pが撮像画面5Aの下方から撮像画面5Aを通過して上方に抜ける場合である。
【0048】
a) 粒子P1,P2が図6(a)に示す位置では、全セルの輝度が100であるので、粒子P1,P2は未検出であり、計測不可と判定する。
【0049】
b) 粒子P1,P2が図6(b)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1は検出されているが、粒子P1がエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0050】
c) 粒子P1,P2が図6(c)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1が検出されている。しかも、エッジ部の全てのセルの輝度が100であるので、粒子P1の全部の形状が取り込まれた場合である。そこで、この場合の画像信号に基づき粒子P1の形状・径を計測する。
【0051】
d) 粒子P1,P2が図6(d)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1が検出されている。しかし粒子P2のため、輝度が0を超え、且つ100未満のセルが不連続な状態で存在している。そこで、この場合は計測不可と判定する。粒子P1,P2の温度が異なる場合があり、何れを基準に温度の計測を行えば良いかが定まらないからである。
【0052】
e) 粒子P1,P2が図6(e)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1が検出されている。しかし粒子P2のため、輝度が0を超え、且つ100未満のセルが不連続な状態で存在している。そこで、この場合は、図6(d)と同様に、計測不可と判定する。かかる場合を測定可能期間TLとして二色温度計の原理に基づき温度を演算すると、粒子P1,P2の温度が異なる場合、両者の平均温度が演算されてしまい、計測した形状の粒子P1または粒子P2に対応する温度を正確に計測することができないからである。
【0053】
f) 粒子P1,P2が図6(f)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P2が検出されている。しかも、エッジ部の全てのセルの輝度が100であるので、図6(c)と同様に、粒子P2の全部の形状が取り込まれた場合である。そこで、この場合の画像信号に基づき粒子P2の形状・径を計測する。
【0054】
g) 粒子P1,P2が図6(g)に示す位置では、一部のエッジのセルの輝度がグレーであるので粒子P2は検出されているが、粒子P2がエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0055】
なお、上記実施の形態では燃焼場における粒子P,P1,P2の形状・径と温度とを同時計測する場合について説明したが、燃焼場における粒子P,P1,P2に限定する必要はなく、燃焼場における液滴とすることもできる。より一般に、粒子または液滴の形状・径と温度とを同時計測する場合にも適用できる。例えば、排気ガス中の粒子状物質を計測することもできる。要は、シャドウドップラー光学系Iを介して高速度カメラ5で、レーザー光L1,L2の交差点における形状を撮影し得るものであれば良い。
【0056】
また、上記実施の形態では、一定のサンプリング周期で高速度カメラ5により撮像した画像信号をパソコン6の記憶装置(図示せず)に予め記憶させておき、この記憶データを処理するようにしたが、これに限るものではない。パソコン6における1ステップ分の情報処理に要する時間が短ければ、高速度カメラ5で撮像した画像信号をリアルタイムで処理することもできる。
【産業上の利用可能性】
【0057】
本発明は固体の燃料粒子または液体の燃料液滴の燃焼場における形状・径と温度とを同時計測して粒子あるいは液滴の挙動の数値シミュレーションを行う産業分野において良好に適用し得る。
【符号の説明】
【0058】
I シャドウドップラー光学系
II カセグレン光学系
L1,L2 レーザー光
B 火炎
P,P1,P2 粒子
λ1、λ2 波長
Iλ1、Iλ2 光強度
M 測定領域
R 受光領域
TL 測定可能期間
1、3 集光レンズ
2 コリメートレンズ
4 対物レンズ
5 高速度カメラ
5A 撮像画面
6 パソコン
7 光ファイバー
8 分光器
【技術分野】
【0001】
本発明は粒子及び液滴の形状・径と温度との同時計測システム並びにそのプログラムに関し、特に固体の燃料粒子や液体の燃料液滴の燃焼場内における形状・径と温度とを同時に計測する場合に適用して有用なものである。
【背景技術】
【0002】
埋蔵量が多く供給安定度が高い石炭は火力発電の燃料として汎用されているが、その利用に当たっては環境汚染物質の排出量の抑制や資源の有効活用のため、低NOx燃焼技術の開発等、燃焼技術のより一層の高度化が求められている。
【0003】
現在、最も一般的に用いられている石炭の利用技術は、石炭を平均径40μm程度に粉砕すると共に空気搬送し、バーナーで燃焼させる微粉炭燃焼方式である。かかる微粉炭燃焼方式では、微粉炭粒子が乱流場において空気と混合・燃焼する過程がNOxの排出量や燃焼効率に大きく影響するため、高温の乱流場における微粉炭粒子の挙動を正確に把握することが極めて重要となる。ここで、微粉炭粒子の平均径は40μm程度であるが、実際、火炉に供給される微粉炭はその径が数μmから100μm程度と広い分布を有する。一方、微粉炭の温度上昇は、径が小さいほど上昇速度が大きくなる。そこで、高温の乱流場における微粉炭粒子の挙動を正確に把握するには、微粉炭粒子の径と温度との関係を把握することが肝要である。すなわち、どの程度の径の微粉炭粒子が、どの程度の温度になっているかを知ることがNOxの排出量の低減や、燃焼効率の向上等を図る上で非常に重要になってくる。
【0004】
しかしながら、現状では微粉炭等の粒子の形状・径と温度とを同時計測するシステムは存在せず、石炭の燃焼に関連してその着火、燃焼性を評価する装置として特許文献1が存在するだけである。
【0005】
なお、形状・径と温度とを同時に計測することは、微粉炭等の固体の燃料粒子を対象物とする場合だけでなく、液体の燃料液滴を対象物とする場合にも同様に必要とされる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2927154号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上記従来技術に鑑み、微粉炭等の粒子、燃料液滴等、燃焼場における粒子や液滴のみならず、一般的に粒子や液滴の挙動を把握するための基礎データを得るべく粒子及び液滴の形状・径と温度との同時計測システム並びにそのプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成する本発明の第1の態様は、2本のレーザー光の交差点に形成される測定領域を通過する粒子または液滴で前記レーザー光が遮光されることにより形成される影に基づく前記粒子または液滴の形状を第1の光学系を介して撮影するとともに、前記粒子または液滴の形状を表す画像信号を送出する撮影手段と、第2の光学系を介して得られる前記測定領域中の粒子または液滴による複数の特定波長の光強度をそれぞれ表す発光信号を送出する温度計測手段と、前記画像信号を処理して前記粒子または液滴の全部が前記撮影手段の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により前記粒子または液滴の温度を演算する演算処理手段とを有することを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0009】
本発明の第2の態様は、第1の態様に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、前記第2の光学系はカセグレン光学系であることを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0010】
本発明の第3の態様は、第1または第2の態様に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、前記測定可能期間は、二次元平面の前記撮像画面を格子状のセルに分割して各セルにおける前記画像信号の輝度を検出し、4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間としたことを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0011】
本発明の第4の態様は、第3の態様に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、前記4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間であっても、前記内部のセルに複数の低輝度部分が不連続な領域として存在する場合には、前記測定可能期間から除外することを特徴とする粒子及び液滴の形状・径と温度との同時計測システムにある。
【0012】
本発明の第5の態様は、1ステップ分の前記画像信号及び前記発光信号を読込む処理と、読込んだ画像信号に基づき前記粒子または液滴の全部が前記撮影手段の撮像画像に取り込まれている期間である測定可能期間であるか否かを判定する判定処理と、判定処理の結果測定可能期間である場合には、前記粒子または液滴の形状・径を演算するとともに前記発光信号に基づき二色温度計の原理による前記粒子または液滴の温度の演算を行う演算処理とを電子計算機に行わせることを特徴とする粒子及び液滴の形状・径と温度との同時計測プログラムにある。
【発明の効果】
【0013】
本発明によれば、2本のレーザー光の交差点に形成される測定領域を撮影する撮影手段で、前記測定領域を通過する粒子または液滴の像の全部が前記撮影手段の撮像画面に取り込まれている期間である測定可能期間に、温度計測手段により前記粒子または液滴の温度を計測するようにしたので、粒子または液滴の形状・径と温度とを同時に計測することができる。
【0014】
この結果、前記粒子または液滴の燃焼場等における挙動を正確に把握することができる。このことにより、例えば燃焼場における固体の燃料粒子や液体の燃料液滴の燃焼の数値シミュレーションを行う場合等に有用な基礎データを容易且つ正確に得ることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態に関する図で、(a)は実施の形態に係る粒子の形状・径と温度との同時計測システムを示すブロック線図、(b)は計測される粒子の形状の一例を模式的に示す説明図である。
【図2】図1に示すシステムにおける光学系の構成例と測定・受光領域との関係を示す説明図である。
【図3】図1に示すシステムにおける粒子の形状・径と温度との測定原理を説明するための説明図である。
【図4】本発明の実施の形態に係る粒子の形状・径と温度との同時計測のフローを示すフローチャートである。
【図5】本発明の実施の形態における単一粒子の粒子像判別方法を示す説明図である。
【図6】本発明の実施の形態における複数の粒子が撮像領域内に存在する場合の粒子判別手法を示す説明図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態を詳細に説明する。なお、図1〜図6中の同一部分には同一番号を付し、重複する説明は省略する。また、本形態は微粉炭火炎内の粒子を計測対象とした場合である。
【0017】
図1(a)は本発明の実施の形態に係る粒子の形状・径と温度との同時計測システムを示すブロック線図である。同図に示すように、本形態において粒子の形状・径の計測系はシャドウドップラー光学系を利用して構成されている。このシャドウドップラー光学系Iではレーザー光源(図示せず)から出射されたレーザー光をビームスプリッタ(図示せず)で等しい強度をもつ平行な2本のレーザー光L1,L2に分離し、このレーザー光L1,L2を集光レンズ1を介して燃焼場の火炎B内で交差させる。このときの火炎Bは固体燃料(例えば微粉炭)の燃焼により形成されるもので、この火炎B中におけるレーザー光L1,L2の交差点が測定領域となる。交差した後のレーザー光L1,L2はコリメートレンズ2でコリメートされた後、集光レンズ3で集光され、対物レンズ4を介して撮像手段である高速度カメラ5に入射される。かくして高速度カメラ5では火炎B内の交差点に形成された測定領域の画像が撮影される。したがって、火炎B内の測定領域に燃焼に伴う粒子が存在する場合、その影として図1(b)に示すような粒子Pの形状が撮影される。高速度カメラ5では撮影した粒子Pの形状を表す画像信号を演算処理手段であるパーソナルコンピュータ(以下、パソコンという)6に送出する。パソコン6では、粒子Pの画像信号を所定の処理手順に基づき処理することにより粒子Pの形状及び径を計測する。かかる計測に伴う具体的な処理手順に関しては後に詳述する。
【0018】
一方、粒子Pの温度を計測する温度計測系は、燃焼場における粒子Pの局所的な発光を検出するのに最適なカセグレン光学系IIを利用して構成されている。カセグレン光学系IIで検出した火炎Bの前記測定領域における局所の発光データは、光ファイバー7を介して分光器8に入力される。分光器8では前記発光データのうち特定の2種類の波長λ1、λ2の光の光強度Iλ1、Iλ2を検出し、各光強度Iλ1、Iλ2を表す発光信号をパソコン6に入力する。パソコン6では、いわゆる二色温度計の原理に基づく次式(1)の演算を行うことにより測定領域の局所の温度を演算する。なお、式(1)は波長λ1、λ2の光強度Iλ1、Iλ2の比を表しているが、同式(1)中、温度T以外は、常数乃至既知であるので、光強度Iλ1、Iλ2を計測することで粒子Pの温度Tを演算により求めることができる。
【0019】
【数1】
【0020】
図2は図1に示すシステムにおける光学系の構成例と測定・受光領域との関係を示す説明図である。同図(a)、(b)、(c)は図1に示すシャドウドップラー光学系Iとカセグレン光学系IIとの位置関係を平面的に見た図である。図2(a)はレーザー光L1,L2が形成する交差点の測定領域に対してカセグレン光学系IIを直角に臨ませた場合である。この場合は図2(d)に示すように、楕円形状のシャドウドップラー光学系Iの測定領域Mに対し、その中央部に円形のカセグレン光学系IIによる受光領域Rが形成される。図2(b)はレーザー光L1,L2が形成する交差点の測定領域に対してカセグレン光学系IIを直角方向に対し傾斜させて臨ませた場合である。この場合は図2(e)に示すように、シャドウドップラー光学系Iの測定領域Mに対し、その中央部に長軸が左右方向に若干広がる楕円形のカセグレン光学系IIによる受光領域Rが形成される。図2(c)はレーザー光L1,L2が形成する交差点の測定領域に対してカセグレン光学系IIを平行に臨ませた場合である。この場合は図2(f)に示すように、楕円形状のシャドウドップラー光学系Iの測定領域Mに対し、その中央部に長軸が左右方向に図2(e)の場合よりもさらに広がる楕円形のカセグレン光学系IIによる受光領域Rが形成される。すなわち、シャドウドップラー光学系Iに対してカセグレン光学系IIを図2(a)に示す状態から図2(c)に示す状態に向けて傾斜させるに伴い、測定領域M内に形成される受光領域Rの面積が漸増する。この結果、図2(c)に示す場合が最も多くの粒子Pを受光領域R内に捕捉することができる。したがって、空間分解能を上げて厳密な粒子Pの形状・径乃至温度のデータを得たい場合には図2(a)に示す配置が好適であり、例えば時系列的に粒子Pの形状・径や温度がどのように変化するかという多くのデータを得たい場合には図2(c)に示す配置が好適である。
【0021】
なお、測定領域Mは、一例を挙げれば、αが800μm程度、βが100〜200μm程度の極く微少な領域であり、受光領域Rは測定領域Mに内包されるさらに局所の領域である。
【0022】
図3は図1に示すシステムにおける粒子の形状・径と温度との測定原理を説明するための説明図である。同図に示すように、粒子Pの画像に欠けがない範囲で光強度Iλ1、Iλ2の比により局所の温度が求まる。さらに詳言すると、図3(a)に示すように、火炎B中の粒子Pが測定領域M内の受光領域Rを図中下から上へ移動した場合を考える。この場合、高速度カメラ5の撮像画面5Aに対する粒子Pの時系列的な位置関係は図3(b)に示すようになる。すなわち、時刻t0では撮像画面5Aの撮像領域外に在った粒子Pが時刻t1でその一部が撮像画面5Aの撮像領域内に入り、時刻t2で完全に入って時刻t3までこの状態が継続され、さらに時刻t4で一部が撮像領域から出て、時刻t5では完全に撮像画面5Aの撮像領域外に出てしまう。このときの時間tと分光器8を介して計測される粒子Pが発する光の強度Iとの関係は図3(c)に示すようになる。図3(c)を参照すれば明らかな通り、時刻t2〜時刻t3で粒子Pの全体からの発光信号が得られ、この期間が粒子Pの温度の測定可能期間TLであることが分る。
【0023】
また、高速度カメラ5で撮影した測定可能期間TLにおける粒子Pの形状を表す画像信号をパソコン6で処理することによりその形状及び径を計測することができる。かかる画像信号と二色温度計の原理に基づき演算される粒子Pの温度データとを対応させることにより所定の粒子Pの形状・径と温度との同時計測が可能となる。
【0024】
かかる粒子Pの形状・径と温度との同時計測は、例えば図4に示すような手順でパソコン6において実施される。図4は本発明の実施の形態に係る粒子Pの形状・径と温度との同時計測のフローを示すフローチャートである。
【0025】
本形態は、一定のサンプリング周期で高速度カメラ5により撮像した画像信号をパソコン6の記憶装置(図示せず)に予め記憶させておき、この記憶データを処理する場合である。そこで、データ解析開始と同時に1ステップ分の画像信号と発光信号とを読み出す(ステップST1参照)。
【0026】
次に、画像信号による粒子Pの画像を判定する(ステップST2参照)。すなわち、撮像画面5A内における粒子Pの画像の欠けの有無を判定し、欠けがない場合(図3(b)の時刻t2〜t3のように粒子Pの形状の全体が撮像画面5Aに含まれている場合)を粒子Pの形状・径が演算可能な場合であるとして粒子Pの形状・径の演算を行う(ステップST3参照)と同時に、そのときの粒子Pの温度の演算を行う(ステップST4参照)。その後、それぞれの演算結果を対応付け、粒子Pの形状・径及び温度のデータとして記憶装置に記憶させるとともに、パソコン6の表示部6Aに表示させる(ステップST5参照)。
【0027】
ステップ1の処理で、粒子Pが検出されないか、または検出されても欠けが存在すると判定された場合(図3(b)の時刻t0〜t1または時刻t4〜t5の場合)は次のステップの画像信号及び発光信号の存在の有無を判定する(ステップST6参照)。
【0028】
次のステップのデータがない場合は、データ解析を終了させ(ステップST7参照)、データがある場合は次のステップに進み(ステップST8参照)、ステップST1〜ステップST6の処理を繰り返す。
【0029】
上記ステップST2に示す画像信号による粒子像の判定処理は、具体的には図5または図6に示すような態様で行われる。本形態に係る粒子像の判定処理に関する具体的な処理手順を、その代表的な3種類の態様についてそれぞれ詳説する。
【0030】
図5は単一粒子Pの、図6は複数粒子の粒子像判別方法を示す説明図である。両図には、撮像画面5Aの各セルを格子状に区切られた一つの矩形として模式的に示すとともに、粒子Pと撮像画面5Aとの位置関係を示している。
【0031】
ここで、各セルの輝度を次のように仮定する。
1) 特定のセルの全ての領域が粒子Pを検出していない場合、そのセルの輝度を100とする。
【0032】
2) 特定のセルの全ての領域が粒子Pで占められている場合、そのセルの輝度を0(図中5に黒塗り部として表記)とする。
【0033】
3) 粒子Pの輪郭部にあたるセルの輝度は、0を超え、100未満(図5中にグレー部部として表記)とする。
【0034】
<単一粒子の判別方法I>
本例は、単一の粒子Pが撮像画面5Aの下方から撮像画面5Aを通過して上方に抜ける場合である。
【0035】
a) 粒子Pが図5(a)に示す位置では、全セルの輝度が100であるので、粒子Pは未検出であり、計測不可と判定する。
【0036】
b) 粒子Pが図5(b)に示す位置では、一部のエッジのセルの輝度がグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0037】
c) 粒子Pが図5(c)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0038】
d) 粒子Pが図5(d)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0039】
e) 粒子Pが図5(e)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pが検出されている。しかも、エッジ部の全てのセルの輝度が100であるので、全部の形状が取り込まれている。そこで、かかる状態の画像信号に基づき粒子の形状・径を計測する。ここで、形状は、例えば図5(e)中のグレー領域の形状で近似的に求めることができる。また、径は、例えば輝度が0またはグレーとなっているセルの数に基づき演算により求めることができる。さらに詳言すると、例えば輝度が0のセルはその数を単純に加算するとともに、グレーのセルは各セルに関し輝度が100の場合の何%であるかを求め、その割合を係数として各セル毎に加算し、両者の合計の値に対し、セルの径(既知)を掛けてやれば良い。
【0040】
f) 粒子Pが図5(f)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pが検出されている。しかも、図5(e)と同様に、エッジ部の全てのセルの輝度が100であるので、全部の形状が取り込まれている。そこで、かかる状態の画像信号に基づき粒子Pの形状・径を計測する。
【0041】
g) 粒子Pが図5(g)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、粒子Pがエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0042】
h) 粒子Pが図5(h)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子Pは検出されているが、エッジの一部のセルの輝度が0またはグレーであり、エッジに粒子Pが存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0043】
i) 粒子Pが図5(i)に示す位置では、全セルの輝度が100であるので、粒子Pは未検出であり、計測不可と判定する。
【0044】
<単一粒子の判別方法II>
本例は、粒子Pが図5の紙面に対し直角に移動した場合である。この場合には粒子Pが撮像画面5Aに対して、(II−1)a)粒子Pなし、b)図5(e)または図5(f)に示す状態、c)粒子Pなしと変化する場合と、(II−2)a)粒子Pなし、b)図5(c)または図5(g)に示す状態、c)粒子Pなしと変化する場合とが考えられる。
【0045】
これらのうち、(II−1)に示す場合は、図5(e)または図5(f)に示す状態で、一部のセルの輝度が0またはグレーとなるので粒子Pが検出され、しかもエッジ部の全てのセルの輝度が100であるので、かかる状態の画像信号に基づき粒子Pの形状・径を計測する。
【0046】
一方、(II−2)に示す場合は、図5(c)または図5(g)に示す状態で、一部のセルの輝度が0またはグレーとなるので粒子Pが検出されるが、一部のエッジ部のセルの輝度が0またはグレーであり、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0047】
<複数の粒子の判別方法>
本例は、複数の粒子Pが撮像画面5Aの下方から撮像画面5Aを通過して上方に抜ける場合である。
【0048】
a) 粒子P1,P2が図6(a)に示す位置では、全セルの輝度が100であるので、粒子P1,P2は未検出であり、計測不可と判定する。
【0049】
b) 粒子P1,P2が図6(b)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1は検出されているが、粒子P1がエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0050】
c) 粒子P1,P2が図6(c)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1が検出されている。しかも、エッジ部の全てのセルの輝度が100であるので、粒子P1の全部の形状が取り込まれた場合である。そこで、この場合の画像信号に基づき粒子P1の形状・径を計測する。
【0051】
d) 粒子P1,P2が図6(d)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1が検出されている。しかし粒子P2のため、輝度が0を超え、且つ100未満のセルが不連続な状態で存在している。そこで、この場合は計測不可と判定する。粒子P1,P2の温度が異なる場合があり、何れを基準に温度の計測を行えば良いかが定まらないからである。
【0052】
e) 粒子P1,P2が図6(e)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P1が検出されている。しかし粒子P2のため、輝度が0を超え、且つ100未満のセルが不連続な状態で存在している。そこで、この場合は、図6(d)と同様に、計測不可と判定する。かかる場合を測定可能期間TLとして二色温度計の原理に基づき温度を演算すると、粒子P1,P2の温度が異なる場合、両者の平均温度が演算されてしまい、計測した形状の粒子P1または粒子P2に対応する温度を正確に計測することができないからである。
【0053】
f) 粒子P1,P2が図6(f)に示す位置では、一部のセルの輝度が0またはグレーであるので粒子P2が検出されている。しかも、エッジ部の全てのセルの輝度が100であるので、図6(c)と同様に、粒子P2の全部の形状が取り込まれた場合である。そこで、この場合の画像信号に基づき粒子P2の形状・径を計測する。
【0054】
g) 粒子P1,P2が図6(g)に示す位置では、一部のエッジのセルの輝度がグレーであるので粒子P2は検出されているが、粒子P2がエッジに存在しており、全部の形状が取り込まれているとは限らないので、計測不可と判定する。
【0055】
なお、上記実施の形態では燃焼場における粒子P,P1,P2の形状・径と温度とを同時計測する場合について説明したが、燃焼場における粒子P,P1,P2に限定する必要はなく、燃焼場における液滴とすることもできる。より一般に、粒子または液滴の形状・径と温度とを同時計測する場合にも適用できる。例えば、排気ガス中の粒子状物質を計測することもできる。要は、シャドウドップラー光学系Iを介して高速度カメラ5で、レーザー光L1,L2の交差点における形状を撮影し得るものであれば良い。
【0056】
また、上記実施の形態では、一定のサンプリング周期で高速度カメラ5により撮像した画像信号をパソコン6の記憶装置(図示せず)に予め記憶させておき、この記憶データを処理するようにしたが、これに限るものではない。パソコン6における1ステップ分の情報処理に要する時間が短ければ、高速度カメラ5で撮像した画像信号をリアルタイムで処理することもできる。
【産業上の利用可能性】
【0057】
本発明は固体の燃料粒子または液体の燃料液滴の燃焼場における形状・径と温度とを同時計測して粒子あるいは液滴の挙動の数値シミュレーションを行う産業分野において良好に適用し得る。
【符号の説明】
【0058】
I シャドウドップラー光学系
II カセグレン光学系
L1,L2 レーザー光
B 火炎
P,P1,P2 粒子
λ1、λ2 波長
Iλ1、Iλ2 光強度
M 測定領域
R 受光領域
TL 測定可能期間
1、3 集光レンズ
2 コリメートレンズ
4 対物レンズ
5 高速度カメラ
5A 撮像画面
6 パソコン
7 光ファイバー
8 分光器
【特許請求の範囲】
【請求項1】
2本のレーザー光の交差点に形成される測定領域を通過する粒子または液滴で前記レーザー光が遮光されることにより形成される影に基づく前記粒子または液滴の形状を第1の光学系を介して撮影するとともに、前記粒子または液滴の形状を表す画像信号を送出する撮影手段と、
第2の光学系を介して得られる前記測定領域中の粒子または液滴による複数の特定波長の光強度をそれぞれ表す発光信号を送出する温度計測手段と、
前記画像信号を処理して前記粒子または液滴の全部が前記撮影手段の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により前記粒子または液滴の温度を演算する演算処理手段とを有することを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項2】
請求項1に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、
前記第2の光学系はカセグレン光学系であることを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項3】
請求項1または請求項2に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、
前記測定可能期間は、二次元平面の前記撮像画面を格子状のセルに分割して各セルにおける前記画像信号の輝度を検出し、4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間としたことを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項4】
請求項3に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、
前記4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間であっても、前記内部のセルに複数の低輝度部分が不連続な領域として存在する場合には、前記測定可能期間から除外することを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項5】
1ステップ分の前記画像信号及び前記発光信号を読込む処理と、読込んだ画像信号に基づき前記粒子または液滴の全部が前記撮影手段の撮像画像に取り込まれている期間である測定可能期間であるか否かを判定する判定処理と、判定処理の結果測定可能期間である場合には、前記粒子または液滴の形状・径を演算するとともに前記発光信号に基づき二色温度計の原理による前記粒子または液滴の温度の演算を行う演算処理とを電子計算機に行わせることを特徴とする粒子及び液滴の形状・径と温度との同時計測プログラム。
【請求項1】
2本のレーザー光の交差点に形成される測定領域を通過する粒子または液滴で前記レーザー光が遮光されることにより形成される影に基づく前記粒子または液滴の形状を第1の光学系を介して撮影するとともに、前記粒子または液滴の形状を表す画像信号を送出する撮影手段と、
第2の光学系を介して得られる前記測定領域中の粒子または液滴による複数の特定波長の光強度をそれぞれ表す発光信号を送出する温度計測手段と、
前記画像信号を処理して前記粒子または液滴の全部が前記撮影手段の撮像画面に取り込まれている期間である測定可能期間を検出するとともに、前記測定可能期間に対応する前記発光信号に基づき二色温度計の原理により前記粒子または液滴の温度を演算する演算処理手段とを有することを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項2】
請求項1に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、
前記第2の光学系はカセグレン光学系であることを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項3】
請求項1または請求項2に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、
前記測定可能期間は、二次元平面の前記撮像画面を格子状のセルに分割して各セルにおける前記画像信号の輝度を検出し、4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間としたことを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項4】
請求項3に記載する粒子及び液滴の形状・径と温度との同時計測システムにおいて、
前記4辺の各エッジ部の全てのセルが高輝度部分となり、同時に前記撮像画面における前記各エッジ部の内部のセルに低輝度部分が存在する期間であっても、前記内部のセルに複数の低輝度部分が不連続な領域として存在する場合には、前記測定可能期間から除外することを特徴とする粒子及び液滴の形状・径と温度との同時計測システム。
【請求項5】
1ステップ分の前記画像信号及び前記発光信号を読込む処理と、読込んだ画像信号に基づき前記粒子または液滴の全部が前記撮影手段の撮像画像に取り込まれている期間である測定可能期間であるか否かを判定する判定処理と、判定処理の結果測定可能期間である場合には、前記粒子または液滴の形状・径を演算するとともに前記発光信号に基づき二色温度計の原理による前記粒子または液滴の温度の演算を行う演算処理とを電子計算機に行わせることを特徴とする粒子及び液滴の形状・径と温度との同時計測プログラム。
【図4】

【図1】
【図2】
【図3】
【図5】
【図6】
【図1】
【図2】
【図3】
【図5】
【図6】
【公開番号】特開2012−13580(P2012−13580A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2010−151441(P2010−151441)
【出願日】平成22年7月1日(2010.7.1)
【出願人】(000173809)財団法人電力中央研究所 (1,040)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成22年7月1日(2010.7.1)
【出願人】(000173809)財団法人電力中央研究所 (1,040)
【Fターム(参考)】
[ Back to top ]