
粒子検出用の2次元光学画像化方法及びシステム
【課題】従来の点及びアレイ検出ベース光学粒子カウンタと比較して検出感度の増強及び感知機能性の拡張に達するために2次元光学画像化を使用する粒子検出及び分析のための方法及びシステムを提供する。
【解決手段】方法及びシステムは2次元光学画像化ベース粒子感知プラットフォームを提供し、システム構成要素及び仕様は、システムに供給された粒子からの光学散乱又は放射から、粒子検出シグニチャを含む再生可能で容易に識別可能な信号を生成するように選択される。液相試料又は気相試料中の粒子を正確に高感度で検出、識別、及び特性評価する(例えば、サイズを決定する)ことができる。
【解決手段】方法及びシステムは2次元光学画像化ベース粒子感知プラットフォームを提供し、システム構成要素及び仕様は、システムに供給された粒子からの光学散乱又は放射から、粒子検出シグニチャを含む再生可能で容易に識別可能な信号を生成するように選択される。液相試料又は気相試料中の粒子を正確に高感度で検出、識別、及び特性評価する(例えば、サイズを決定する)ことができる。
【発明の詳細な説明】
【関連出願の相互参照】
【0001】
[0001]本出願は、それぞれ2007年12月4日、2007年12月4日、及び2008年10月22日に出願された米国特許仮出願第60/992,192号、第61/005,336号、及び第61/107,397号の利益を主張するものであり、それらは本説明と矛盾しない範囲で参照によりそれらの全体が本明細書に組み込まれる。
【0002】
[連邦政府による資金提供を受けた研究開発の記載]
[0002]該当せず。
【背景技術】
【0003】
[0003]本発明は光学粒子分析器の分野に関する。本発明は、一般に、流体試料中の粒子を検出及び特性評価するための2次元光学画像化ベースの方法及びシステムに関する。本発明は、さらに、一般に、小さい物理的寸法(例えば0.1ミクロン未満)を有する粒子を正確に検出及び特性評価するように光学粒子分析器の感度及び多用性を改善し、並びにこれらのシステムのデバイス性能を拡大するための方法及びシステムに関する。
【0004】
[0004]微量汚染産業及び清浄製造産業の大部分は、米国特許第3,851,169号、第4,348,111号、第4,957,363号、第5,085,500号、第5,121,988号、第5,467,188号、第5,642,193号、第5,864,399号、第5,920,388号、第5,946,092号、及び第7,053,783号を含む大量の米国特許に記載されているような光学粒子カウンタの使用に依存している。粒子カウンタは米国特許第4,728,190号、第6,859,277号、及び第7,030,980号、第5,282,151号にも記載されており、それらは参照によりそれらの全体が本明細書に組み込まれる。
【0005】
[0005]光学粒子センサ及びカウンタは、半導体産業、製薬産業、及びマイクロエレクトロニクス産業に含まれる様々な産業用途で有用である。ある産業環境では、光学粒子センサ及びカウンタは、例えば、微粒子汚染に関して厳格な規制基準を課せられる医薬品の製造におけるプロセスで使用される材料の組成及び純度を連続的にモニタするための重要な器具を提供する。他の産業環境では、光学粒子センサ及びカウンタは、例えば、高品質フォトレジスト及び半導体材料のオフライン品質管理点検用の品質管理分析を行うための重要な器具を提供する。流体が望ましくない粒子で汚染されている場合、迅速に識別するのは特に有利であり、その結果、プロセスを初期段階で停止し、それによって、欠陥製品の無駄な製造を回避することができる。例えば半導体環境及び他のクリーンルーム環境、又は無菌で純粋な製造(例えば製薬)を必要とする産業では、最終製品を製作するために使用される材料流体は、十分な純度と、流体中に浮遊するいかなる望ましくない粒子も受け入れ可能な許容範囲内にあることとを保証するために連続的にモニタされる。エアロゾル粒子カウンタは、多くの場合、クリーンルーム及びクリーン区域中の浮遊微粒子汚染を測定するために使用される。液相粒子カウンタは、多くの場合、製薬産業、水処理産業、及び化学処理産業において微粒子汚染を測定するために使用される。
【0006】
[0006]粒子モニタセンサの重要性は、信頼性及びスループットを改善し、より小さいサイズを有する粒子の検出及び特性評価を可能にするためにこれらのデバイスの連続的で継続した改善及び発展に反映されている。感度及び粒子サイズ分類能力への制限に加えて、現況技術の光学粒子カウンタは、一般に、検出器雑音及び/又は粒子からの光学散乱以外のプロセスに起因する信号が粒子検出事象によるものである場合に生成される誤りカウントに関連する問題の影響を受けやすい。誤りカウントが発生すると、システムの精度及び感度に悪影響がある。さらに、誤りカウントが発生すると、小さい物理的寸法(例えば0.1ミクロン未満)を有する粒子を正確に検出及び特性評価するための光学粒子分析器の能力も妨げられる。その結果、光学粒子カウンタ及び分析器の誤りカウントを回避又は抑制するための設計方策が、次世代のこれらのデバイスの発展における優先事項と認識されている。
【発明の概要】
【0007】
[0007]本発明は、従来の点ベース及びアレイベース光学粒子カウンタと比較して検出感度の増強及び感知機能性の拡張に達するために2次元光学画像化を使用する粒子検出及び分析のための方法及びシステムを提供する。本発明の方法及びシステムは2次元光学画像化ベース粒子感知プラットフォームを提供し、システム構成要素及び仕様は、システムに供給された粒子からの光学散乱又は放射から、粒子検出シグニチャを含む再生可能で容易に識別可能な信号を生成するように選択される。本発明のシステム及び方法は、液相環境又は気相環境中の粒子を正確に高感度で検出、識別、及び特性評価する(例えば、サイズを決定する)ことができる。本発明のシステム及び方法は、実時間で粒子検出シグニチャを効率的に生成及び識別することができ、それによって、粒子によって散乱又は放射された電磁放射を画像化するように構成された2次元検出器からの出力データの分析及びフィルタ処理が可能になる。
【0008】
[0008]一態様では、本発明の2次元光学画像化方法及びシステムは、2次元検出器のアレイに設けられた複数の検出器要素からの出力信号の十分に規定された1次元又は2次元パターンを含む特有な粒子検出シグニチャを生成することができる。特有な粒子検出シグニチャの生成が、本発明において、粒子からの光学散乱又は放射を、バックグラウンド流体からの分子散乱、検出器雑音、及び/又は電磁放射の注目する粒子との相互作用以外のプロセスから生じる検出器信号と区別するために使用される。本発明のこの態様の特有な粒子検出シグニチャの識別及び特性評価に基づく粒子検出は、粒子計数及びサイズ分類用途にいくつかの性能利益を与える。第1に、特有な粒子検出シグニチャの識別及び特性評価による粒子検出は、高エネルギー光子(例えば宇宙線)、検出器雑音、及び非粒子源からの散乱又は放射など注目する事象の粒子散乱又は放射以外の発生源から生じる検出器信号からの誤りカウントを著しく抑制する。誤りカウントを減少させると、従来の粒子分析器と比較して本粒子検出、計数、及びサイズ分類の測定及びシステムの精度が改善される。第2に、閾値依存粒子検出シグニチャを使用すると、非粒子雑音源に起因する誤りカウントを同時に避けながらより小さい物理的寸法をもつ粒子の検出及び特性評価が可能になる。
【0009】
[0009]一実施形態では、本発明は、2次元光学検出又は画像化を使用して粒子検出シグニチャを生成及び識別することによって、試料中の粒子を検出及び/又は特性評価する方法を提供する。特定の実施形態では、本発明は、(i)選択された流れの方向によって適宜特徴づけられた1つ又は複数の粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、1つ又は複数の粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)複数の検出器要素上に導かれた散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定するステップと、(vi)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャを識別し、それによって流体流れ中の粒子を検出するステップとを含む、流体流れ中の1つ又は複数の粒子を検出する方法を提供する。一実施形態では、この態様の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含み、実施形態によっては、アレイの検出器要素の少なくとも一部が散乱及び/又は放射された電磁放射並びにバックグラウンド散乱電磁放射の強度に対応する出力信号を生成する。この態様の粒子検出シグニチャは、形状、直接隣り合う(directlyadjacent)検出器要素の数を含む検出された要素の数、及び/又はバックグラウンド流体からの分子散乱、検出器雑音、及び粒子散乱又は放射以外のプロセス(例えば宇宙線との相互作用など)に起因する検出器信号を容易に識別及び区別することができる出力信号(例えば強度値)の分布などの明確で再生可能な特徴を有する。一実施形態では、本発明の方法は、粒子検出シグニチャを分析して、粒子のサイズ、形状、及び/又は物理的寸法(例えば、直径、半径、厚さ、長さ、幅、空気動力学的直径など)の特性の表示又は測定値を提供するステップをさらに含む。
【0010】
[0010]当業者には理解されるように、本発明の方法及びシステムは、粒子から散乱又は放射された電磁放射のすべての収集又は検出を、或いは大部分の収集又は検出さえも、必要としない。注目する粒子によって散乱又は放射された電磁放射の一部は、ごく一部の検出でさえも、本発明の方法を実施するのに十分である。例えば、本発明の粒子から散乱又は放射された電磁放射の十分な量の検出には、本発明の2次元検出器上に導かれるか又は画像化されるバックグラウンド電磁放射レベルよりも実質的に大きい強度を有する電磁放射の量の検出が含まれる。
【0011】
[0011]この説明のコンテキストでは、「出力信号」は、検出された電磁放射の強度値に対応する検出器要素からの信号などの2次元検出器の検出器アレイの個々の検出器要素の信号を参照する。出力信号は、時間平均検出器要素出力信号、積分検出器要素出力信号、バックグラウンド成分が差し引かれた出力信号、及び他の信号処理(例えばデータ平滑化など)を受けた出力信号を含む。一実施形態では、例えば、出力信号の各々は、差し引かれるバックグラウンド値を有する。
【0012】
[0012]多くの例では、出力信号から差し引かれるバックグラウンド値は2次元アレイ中の検出器要素ごとに変化する。本明細書で使用される「バックグラウンド値」又は単に「バックグラウンド」という表現は、注目する粒子から散乱及び/又は放射される電磁放射がない状態の検出条件下での検出器要素の1つ又は複数の出力信号を参照する。バックグラウンド値に対応するそのような検出条件には、(i)注目する粒子が電磁放射のビームと相互作用しない検出条件、及び/又は(ii)粒子は電磁放射のビームと相互に作用するが、アレイ中の検出器要素の位置が、検出器要素が粒子からの散乱及び/又は放射された電磁放射を検出しないようなものである検出条件が含まれる。「バックグラウンド値」及び「バックグラウンド」という表現は、注目する粒子からの散乱及び/又は放射される電磁放射がない状態の検出条件での検出器要素の複数の出力信号に対応する平均出力信号値、中心出力信号値、又は中央出力信号値を、例えば、そのような検出条件下での20〜1000個の出力信号測定値に対応する、実施形態によってはそのような検出条件下での20〜500個の出力信号測定値に対応する、平均値、中心値、又は中央値を含む。例えば、いくつかの実施形態におけるバックグラウンド値は、注目する粒子から散乱及び/又は放射される電磁放射がない状態の検出条件での20〜200個の強度測定値の平均に対応し、したがって、個々の検出器要素の「定常状態」の強度値と見なすことができる。
【0013】
[0013]実施形態によっては、出力信号から差し引かれるバックグラウンド値は、アレイ中の検出器要素の位置及び/又は他の試験条件(例えば、光源の強度及びビームプロファイル、流体の組成など)とともに変化する。実施形態によっては、出力信号から差し引かれるバックグラウンド値は粒子分析の間連続的に更新される。例えば、バックグラウンド値は、一実施形態では、粒子検出事象から生じる散乱又は放射された電磁放射を受け取っていない検出器要素からの出力信号の測定及び処理によって連続的に更新される。当業者には理解されるように、粒子検出事象中でさえ、検出器要素のごくわずかの部分しか粒子からの散乱又は放射された電磁放射を受け取り検出しないことがあり、それによって、本発明のいくつかの方法及びシステムでは、アレイ中の他の検出器要素のバックグラウンド値を頻繁に更新することができる。
【0014】
[0014]粒子検出シグニチャは、アレイ中の特定の検出器要素の事前選択された閾値の値よりも大きい出力値を有するという基準を満たす個々の検出器要素(例えば2次元アレイ検出器の画素要素)からの複数の出力信号のパターンを含む。したがって、この閾値依存基準を満たさないアレイの検出器要素からの出力信号は、粒子検出シグニチャを構成する出力信号のパターンの成分ではない。このようにして、本発明の方法及びシステムの粒子検出シグニチャは閾値依存と呼ばれ、「閾値を超える」という表現は、閾値の値を超える出力信号値を有する検出器要素を特に参照する。本発明のいくつかの実施形態では、アレイの個々の検出器要素の閾値の値は同じである。しかし、本発明は、アレイの個々の検出器要素の閾値の値の少なくともいくつかが異なる実施形態を含む。例えば、本発明は、閾値の値がアレイ中の特定の検出器要素の位置とともに変化する方法及びシステムを含む。例えば、一実施形態では、閾値の値は、アレイの個々の検出器要素(例えば2次元検出器の画素)に対応する実際の雑音測定値から導き出される。そのような雑音測定値は、一般に、光源(例えばレーザ)の空間不均一強度プロファイル、光学セルの幾何学的形状、及びいくつかの要因の中で特にシステムの光学要素(例えばレンズ、ウィンドウなど)の光学的特性のために、検出器要素ごとに変化する。本発明の閾値の値は、電磁放射のビームの強度及び/又は検出器利得などのシステムパラメータにより変化することがある。
【0015】
[0015]本発明は、特定の検出器要素の閾値の値が、アレイ中の特定の検出器要素の雑音の測定値、及び/又は注目する粒子によって散乱又は放射される電磁放射がない状態でのアレイ中の特定の検出器要素の出力信号値の測定値(例えば測定されたバックグラウンド値)から導き出される方法及びシステムを含む。特定の検出器要素の測定された雑音レベルの標準偏差よりも大きい閾値の値、又は特定の検出器要素の測定されたバックグラウンド値の標準偏差よりも大きい閾値の値を使用するのは、粒子検出事象を、バックグラウンド流体からの分子散乱、検出器雑音、或いは粒子からの散乱又は放射以外のプロセスに起因する検出器信号と区別するのに有用であり、さらに、非常に小さい物理的寸法(例えば、100ナノメートル未満の直径)を有する粒子を検出するのに有用である。一実施形態では、例えば、アレイ中の特定の検出器要素の閾値の値は、検出器要素の雑音の標準偏差の2.5倍以上であるか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の2.5倍以上である。適宜、いくつかの実施形態では、特定の検出器要素の閾値の値は、検出器要素の雑音の標準偏差の3倍以上であるか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の3倍以上である。適宜、いくつかの実施形態では、特定の検出器要素の閾値の値は検出器要素の雑音の標準偏差の5倍以上であるか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の5倍以上である。一実施形態では、例えば、特定の検出器要素の閾値の値が検出器要素の雑音の標準偏差の2.5〜7倍に等しいか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の2.5〜7倍に等しく、適宜、いくつかの実施形態では、特定の検出器要素の閾値の値が検出器要素の雑音の標準偏差の2.5〜5倍に等しいか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の2.5〜5倍に等しい。
【0016】
[0016]本発明のいくつかの方法及びシステムでは、閾値の値は、例えば、特定の検出器要素に対して注目する粒子からの散乱又は放射される電磁放射がない状態での検出条件での出力信号値(例えばバックグラウンド値)を時間の関数として測定し、アレイ中の個々の検出器要素に対して雑音を計算することによって実験的に決定される。本明細書で使用される「雑音レベル」又は単に「雑音」という表現は、注目する粒子から散乱及び/又は放射される電磁放射がない状態での検出条件での検出器要素の出力信号と、検出器要素の平均バックグラウンド値、中心バックグラウンド値、又は中央バックグラウンド値との間の差を参照する。したがって、実施形態によっては、雑音又は雑音レベルは、アレイ中の特定の検出器要素のバックグラウンド値の一連の測定値の変動の測定値である。2次元検出器の個々の検出器要素の雑音は、検出器要素のバックグラウンド値を時間の関数として測定することによって決定することができる。本明細書で使用される標準偏差は、測定されたパラメータ(例えば、雑音、バックグラウンド値、又は粒子からの散乱又は放射された放射がない状態での出力信号など)の中央値からのそれの平方自乗平均(RMS)偏差を参照するか、又は測定されたパラメータの変動の平方根を参照する。一実施形態では、例えば、標準偏差(σ)は次の表現の
【数1】

を使用して決定され、ここで、Nは雑音測定値の数であり、特定の検出器要素に対して測定されたバックグラウンド値又は他の出力信号値xiは、特定の検出器要素に対して測定された個々の雑音測定値、バックグラウンド値、又は他の出力信号値を参照し、
【数2】
は特定の検出器要素に対する測定された雑音測定値、バックグラウンド値、又は出力信号値の算術平均である。代替として、閾値の値は、実施形態によっては、例えば検出器雑音及び他の検出器属性を予測/特性評価する方法を最初から使用して理論的に決定される。
【0017】
[0017]本発明の粒子検出シグニチャは、粒子検出シグニチャを含む1空間次元又は2空間次元パターンの出力信号における形状、縦方向寸法、及び/又は横方向寸法に対応する幾何学的成分によって特徴づけられる。このコンテキストで使用される幾何学的形状は、粒子検出シグニチャを含む出力信号のパターンの1次元又は2次元空間分布を含む。幾何学的シグニチャの出力信号は各々個々に検出器アレイ中に十分に画定された位置を有する特定の検出器要素にアドレスされる。したがって、この説明のコンテキストでは、出力信号のパターンの空間分布又は形状は、粒子検出シグニチャの出力信号が個々にアドレスされる検出器要素の空間分布又は形状を参照する。幾何学的形状は、実施形態によっては、粒子検出シグニチャの縦方向寸法に沿って設けられた一連の近接する又は直接近接する検出器要素に対応する縦方向成分、及び/又は粒子検出シグニチャの横寸法に沿って設けられた一連の近接する又は直接近接する検出器要素に対応する横方向成分を有する。一実施形態では、例えば、粒子検出シグニチャは、3つ以上の縦方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号値によって特徴づけられた幾何学的形状を有し、実施形態によっては、5つ以上の縦方向に隣り合い直接近接する検出器要素からの出力信号値によって特徴づけられた幾何学的形状を有する。一実施形態では、例えば、粒子検出シグニチャは、2つ以上の横方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号値によって特徴づけられた幾何学的形状を有し、実施形態によっては、4つ以上の横方向に隣り合い直接近接する検出器要素からの出力信号値によって特徴づけられた幾何学的形状を有する。
【0018】
[0018]検出器画素要素の強度値は、多くの場合、電磁放射のビームを通過する試料の光学的特性、物理的寸法、及び/又は流速などの粒子の特定の特性に、並びに電磁放射のビームの物理的寸法、強度分布、及び形状と、電磁放射の少なくとも一部を検出器アレイ上に導く光学系の設計とを含む粒子検出システムの特定の設計及び動作パラメータに部分的に依存する。対照的に、粒子検出シグニチャの幾何学的形状は、多くの場合、粒子サイズ又は形状とほとんど無関係である。したがって、測定された粒子検出シグニチャの形状は、本発明では、粒子検出事象からの散乱又は放射に対応する検出器アレイ出力信号を、バックグラウンド流体からの分子散乱、検出器雑音、或いは粒子からの光学散乱又は放射以外のプロセスに起因する検出器信号と区別するために使用される。粒子検出シグニチャに対応する画素の強度値の分析は、本方法及びシステムでは、電磁放射のビームを通過する粒子のサイズ、物理的寸法、及び数の測定を行うのにさらに有用である。本発明は、長方形、楕円形、円形、正方形、三角形、又はこれらの形状の任意の組合せを含む一連の形状を有する粒子検出シグニチャの使用を含む。
【0019】
[0019]誤りカウントの発生を抑制するのに、及び粒子が小さい(例えば10ミクロン未満)物理的寸法を有する粒子を検出するのに有用な一実施形態では、本発明の方法及びシステムは、実質的に長方形形状などの細長い形状を有する粒子検出シグニチャを生成する。この態様の粒子検出シグニチャの細長くされた特質は、粒子が電磁放射のビームを通って物理的に移送される(例えば、流体流れ中で移送される)ときに生じる散乱プロセスに少なくとも部分的に由来する。したがって、細長い粒子検出シグニチャの縦方向寸法は、ビームを通過する1つ又は複数の粒子の流れの方向及び軌道に少なくとも部分的に対応する。本発明は、ビームを通って移送される粒子の流速及び軌道が十分に規定されたパラメータであり、縦方向に隣り合い直接近接する検出器要素からの少なくとも3つの閾値を超える出力信号などの、粒子サイズに応じて十分に画定され再生可能な縦方向寸法を有する、実質的に長方形の粒子検出シグニチャなどの細長い粒子検出シグニチャが生成される実施形態を含む。本発明の方法は、細長い寸法に対応する幾何学的シグニチャの縦方向成分に対するいくつかの検出器要素を決定するステップを含む。
【0020】
[0020]実施形態によっては、本発明の方法及びシステムは、直接近接する検出器要素を含めてアレイの近接する検出器要素からの複数の出力信号のパターンを含む粒子検出シグニチャを生成する。この説明のコンテキストでは、「近接する(neighboring)」という表現は互いの5つの検出器要素内に位置決めされた検出器要素を参照し、「直接近接する(directlyneighboring)検出器要素」は、アレイ中で互いに直接隣り合って位置決めされた検出器要素を参照する。近接する及び直接近接する検出器要素は縦方向に隣り合う又は横方向に隣り合うことができる。一実施形態では、粒子検出シグニチャは、少なくとも2つの近接する検出器要素からの出力信号を、実施形態によっては少なくとも2つの直接近接する検出器要素からの出力信号を含む。一実施形態では、粒子検出シグニチャは、2個と20個との間の近接する検出器要素からの出力信号を、実施形態によっては2個と20個との間の直接近接する検出器要素からの出力信号を含む。一実施形態では、粒子検出シグニチャは、2個と7個との間の近接する検出器要素からの出力信号を、実施形態によっては2個と7個との間の直接近接する検出器要素からの出力信号を含む。
【0021】
[0021]いくつかの実施形態で有用な粒子検出シグニチャの幾何学的形状は、縦方向成分及び/又は横方向成分に関してさらに特性評価することができる。本明細書で使用される粒子検出シグニチャの「縦方向成分」又は「横方向成分」は、縦方向寸法若しくは軸又は横方向寸法若しくは軸などの粒子検出シグニチャの選択された軸又は寸法に沿って互いに隣り合って位置決めされる特定の検出器要素の閾値の値以上の出力信号を有する複数の隣り合う、適宜直接隣り合う検出器要素に対応する。例えば、本発明の有用な粒子検出シグニチャは、粒子検出シグニチャの縦方向寸法又は横方向寸法に沿って延びる一連の直接近接する検出器要素を含む検出器要素のパターンを含む。
【0022】
[0022]一実施形態では、粒子検出シグニチャの出力信号のパターンの形状は、粒子検出シグニチャの縦方向寸法に沿って位置決めされた特定の検出器要素の閾値の値以上の出力信号を有する一連の隣り合うか又は直接隣り合う検出器要素に対応する縦方向成分を有する。この態様のいくつかの実施形態では、縦方向成分は、流体の流れの方向に沿って散乱又は放射された電磁放射の強度の分布に対応する。いくつかの用途にとって好ましい一実施形態では、例えば、縦方向成分は、2個と20個との間の近接する検出器要素、適宜、2個と20個との間の直接近接する検出器要素からの閾値を超える出力信号を含む。一実施形態では、粒子検出シグニチャの出力信号のパターンは、縦方向成分に垂直に向いた横方向成分を有する。いくつかの用途にとって好ましい一実施形態では、例えば、横方向成分は、2個と10個との間の近接する検出器要素、適宜、2個と10個との間の直接近接する検出器要素からの閾値を超える出力信号を含む。
【0023】
[0023]本発明のいくつかの方法及びシステムの粒子検出シグニチャは、粒子検出シグニチャの閾値基準を満たす、アレイの個々の検出器要素によって受け取られた散乱又は放射された電磁放射の強度に対応する出力信号値などの出力信号値の1次元又は2次元空間分布によって特徴づけられる。粒子検出シグニチャのそのような強度分布は、本方法及びシステムで分析して、粒子のサイズ、形状、及び/又は物理的寸法(直径、半径、厚さ、長さ、幅、空気動力学的直径など)などの粒子の特性の決定又は測定を行うことができる。測定された粒子検出シグニチャの強度分布を本発明でさらに使用して、注目する粒子からの散乱又は放射に対応する検出器アレイ出力信号を、バックグラウンド流体からの分子散乱、検出器雑音、或いは粒子からの光学散乱又は放射以外のプロセスから生じる検出器信号と区別することができる。強度分布成分(例えば、1次元又は2次元強度分布)の分析は、限定はしないが、パターン認識分析、画像閾値分析、及び/又は画像形状分析を含む本発明のいくつかの分析技法を介して実行することができる。一実施形態では、粒子検出シグニチャは、検出シグニチャの出力信号の平均値、又は検出シグニチャの最大出力信号を包含する部分などのシグニチャの一部の出力信号の平均値を計算することによって分析される。一実施形態では、粒子検出シグニチャは、検出シグニチャの出力信号の積分強度値、又は検出シグニチャの出力信号の最大強度値を包含する部分などのシグニチャの一部の出力信号の積分強度値を計算することによって分析される。一実施形態では、粒子検出シグニチャは、検出シグニチャ又はシグニチャの一部の出力信号の強度の重み付き中心を決定すること、適宜、強度の重み付き中心に対応する検出器要素の出力信号を決定すること、又は強度の重み付き中心に対応する検出器要素の出力信号を囲み且つ含む出力信号の分布に対応する平均強度を決定することによって分析される。一実施形態では、粒子検出シグニチャは、検出シグニチャに対応する検出器要素のサイズ、形状、及び/又は数を決定することによって分析される。
【0024】
[0024]一実施形態では、粒子は、少なくとも3つの縦方向に隣り合い直接近接する検出器要素を、実施形態によっては3〜100個の縦方向に隣り合い直接近接する検出器要素を有する粒子検出シグニチャを識別することによって検出される。この態様では、粒子検出シグニチャの識別は粒子検出事象を効果的に識別し、それによって粒子が計数され、例えばサイズに関して分析され得るようにする手段を提供する。実施形態によっては、粒子サイズなどの検出された粒子の特性は、その後、粒子検出シグニチャの分析によって決定される。一実施形態では、例えば、この分析は、粒子検出シグニチャの最大出力信号値を決定するステップを含む。一実施形態では、例えば、この分析は、粒子検出シグニチャを含む出力信号の平均出力信号値を決定するステップを含む。一実施形態では、例えば、この分析は、粒子検出シグニチャを含む出力信号の少なくとも一部の、実施形態によってはそれのすべての、積分出力信号値を決定するステップを含む。一実施形態では、例えば、この分析は、粒子検出シグニチャを含む出力信号の少なくとも一部の、実施形態によってはそれのすべての、出力信号値の重み付き中心を決定するステップを含む。適宜、この態様の方法及びシステムは、重み付き中心に対応する出力信号に対応する出力信号値及び/又は検出器要素を識別するステップをさらに含む。適宜、この態様の方法及びシステムは、重み付き中心を含む隣り合い直接近接する検出器要素に対応する複数の出力信号、例えば重み付き中心を囲む隣り合い直接近接する検出器要素からの複数の出力信号に対応する平均出力信号値及び/又は積分出力信号値を識別するステップをさらに含む。一実施形態では、例えば、分析のステップは、重み付き中心を囲む10個以上の出力信号値に対応するか、又は適宜、重み付き中心を囲む20個以上の出力信号値に対応する積分出力信号値を決定するステップを含む。一実施形態では、例えば、分析のステップは、アレイ中の検出器要素の3〜10列×7〜15行のアレイによって特徴づけられる隣り合い直接近接する検出器要素に対応する重み付き中心を囲む出力信号値に対応する積分出力信号値又は平均出力信号値を決定するステップを含む。この態様の方法では、出力信号値、平均出力信号値、積分出力信号値、又はこれらの任意の組合せは、例えば、アルゴリズム、実験的な若しくは計算された基準値の表、又は出力信号値、平均出力信号値、積分出力信号値を粒子サイズに関連づける他の相関性を使用して粒子のサイズを決定するために使用される。本発明は、粒子検出シグニチャの分析が上述のような複数のステップ、プロセス、及び技法を実行することによって達成される方法及びシステムを含む。
【0025】
[0025]一実施形態では、本発明の方法は、(i)所定のサイズの基準粒子を有する流体流れを供給するステップと、(ii)基準粒子を有する流体流れを電磁放射のビームにさらすステップであり、基準粒子とビームとの間の相互作用が基準粒子からの散乱又は放射された電磁放射を生成する、ステップと、(iii)基準粒子からの散乱又は放射された電磁放射の少なくとも一部を2次元検出器の活性区域の検出器要素のアレイ上に導くステップと、(iv)複数の検出器要素上に導かれた基準粒子からの散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定し、それによって、基準粒子によって散乱された電磁放射の強度の基準粒子検出シグニチャを生成するステップであり、基準粒子検出シグニチャが検出器要素の出力信号の基準パターンを含む、ステップとをさらに含む。一実施形態では、粒子検出シグニチャを識別及び/又は分析するステップは、粒子検出シグニチャの出力信号のパターンを基準粒子検出シグニチャと比較するステップを含む。
【0026】
[0026]別の実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素のサブセットを決定するステップであり、サブセットが複数の検出器要素を含み、サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、(vi)サブセットの出力信号だけをプロセッサに送出するステップと、(vii)プロセッサに送出された出力信号を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。この態様のいくつかの方法では、検出器要素は、検出器要素の閾値の値を超える出力信号だけが事前フィルタ処理され、その結果、適宜、近接する及び/又は直接近接する検出器要素からの出力信号が送出及び処理される。本発明のいくつかの方法では、決定するステップは、2次元検出器の検出器要素の出力信号を分析するステップと、特定の検出器要素の閾値の値よりも大きい出力信号を有する検出器要素を識別するステップとを含む、本明細書で使用される「サブセット」という用語は、CMOS検出器などの2次元検出器の検出器要素のすべてではなく一部を参照し、実施形態によっては粒子から散乱又は放射された電磁放射を検出する検出器要素を参照する。いくつかの方法では、サブセットはアレイの少なくとも3つの近接する又は直接近接する検出器要素を含み、適宜、サブセットはアレイの少なくとも10個の近接する又は直接近接する検出器要素を含む。いくつかの方法では、サブセットはアレイの2〜7個の近接する又は直接近接する検出器要素を含み、適宜、サブセットはアレイの2〜20個の近接する又は直接近接する検出器要素を含む。一実施形態では、サブセットは、検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜50個又は適宜1〜50個の検出器要素をさらに含む。
【0027】
[0027]この態様の一実施形態では、アレイの検出器要素の出力信号は処理される信号であり、例えば、出力信号の各々はアレイの特定の検出器要素について差し引かれるバックグラウンド値を有する。この態様のいくつかの実施形態では、差し引かれるバックグラウンド値の各々は、注目する粒子がビームに供給されない検出条件でのアレイ中の特定の検出器要素の平均出力信号に対応する。一実施形態では、最小閾値の値はアレイ中の異なる検出器要素で変化する。一実施形態では、例えば、アレイ中の特定の検出器要素の閾値の値はアレイの特定の検出器要素の雑音の標準偏差の2.5倍以上であり、適宜、アレイ中の特定の検出器要素の閾値の値はアレイの特定の検出器要素の雑音の標準偏差の2.5〜7倍に等しい。一実施形態では、この態様の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0028】
[0028]別の実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)散乱又は放射された電磁放射の少なくとも一部を検出するステップと、(v)複数の検出フレームを生成するステップであり、各検出フレームが特定の時間間隔で検出器要素の複数の出力信号を含む、ステップと、(vi)散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する複数の検出フレームを組み合わせて、粒子検出事象の複合画像を生成するステップと、(vii)複合画像を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。本明細書で使用される複合画像は、複数の検出フレーム、適宜、単一の粒子検出事象に対応する検出フレームの出力信号の少なくとも一部の組合せに由来するデータポイントの複合物を参照する。実施形態によっては、例えば、粒子からの散乱又は放射は多数の検出フレームにわたって取り込まれ、各フレームからの出力信号の少なくとも一部を組み合わせて粒子からの散乱の複合画像が生成される。実施形態によっては、複合画像を分析して粒子のサイズ又は他の物理的寸法が決定される。本明細書で使用される「検出フレーム」は、2次元検出器の少なくとも一部の複数の出力信号を、適宜、2次元検出器のサブアレイ又は2次元検出器の検出器要素のサブセットからの複数の出力信号を参照する。このように、検出フレームは、粒子を含む流体によって散乱、放射、又は送出された電磁放射の複数の個々の測定値に対応する。
【0029】
[0029]この実施形態の方法は、粒子によって散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する検出フレームを識別するステップをさらに含む。実施形態によっては、検出フレームは、0.5kHz〜20kHzの速度で生成され、適宜、用途によっては0.1kHz〜2kHzの速度で生成される。いくつかの方法では、検出フレームの各々は50μs〜2msの時間間隔に対応する。一実施形態では、1〜100個の検出フレームが組み合わされて複合画像が生成され、適宜、用途によっては1〜20個の検出フレームが組み合わされて複合画像が生成される。この実施形態のいくつかの方法は、検出フレームの各々から基準フレームを差し引くステップをさらに含む。本明細書で使用される基準フレームという用語は、アレイ(又はサブセット若しくはそれのサブアレイ)中の検出器要素の複数のバックグラウンド出力信号を参照し、各バックグラウンド出力信号は、注目する粒子がビームに供給されない検出条件でのアレイ中の特定の検出器要素の平均出力信号である。このように、基準フレームは、流体によって散乱、放射、又は送出された電磁放射の複数の個々の測定値、及び/又は注目する粒子がない状態での光学粒子カウンタシステムに対応する。一実施形態では、基準フレームは、注目する粒子がない状態の検出条件に対応する50〜200個の個々のフレームの平均であり、したがって、アレイ又はそれのサブセット若しくはサブアレイの検出器要素ごとの定常状態値を表す。検出フレームから基準フレームを差し引くことにより、ある条件下で、検出器要素の定常状態値よりも少ない散乱又は放射された光信号を生成する小さい粒子の検出及びサイズ分類が可能になる。適宜、基準フレームはいくつかの方法で連続的に更新される。この実施形態の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0030】
[0030]別の実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)2次元検出器のサブアレイを使用して散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、サブアレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)サブアレイ又はそれの一部に対応する検出器要素の出力信号だけをプロセッサに送出するステップと、(vi)プロセッサに送出された出力信号を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。本明細書で使用される「サブアレイ」という用語は、2次元検出器のアレイの一部を参照する。サブアレイからの出力信号を利用する本発明の方法により、2次元検出器の活性区域の縮小された区域を非常に迅速に読み出す能力が可能になり、それによって、粒子の計数及びサイズ分類のための高頻度及び高感度の測定が実現される。一実施形態では、例えば、サブアレイは2次元検出器の検出器要素の0.2%〜25%を含み、適宜、サブアレイは2次元検出器の検出器要素の0.2%〜10%を含む。一実施形態では、例えば、サブアレイは、32×176の検出要素を含み、適宜、いくつかの用途では64×576の検出要素を含む。一実施形態では、2次元検出器は400000〜1300000個の検出要素を有し、適宜、CMOS検出器である。この実施形態の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0031】
[0031]一実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(ii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iii)2次元検出器のサブアレイを使用して散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、サブアレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)サブアレイの検出器要素のサブセットを決定するステップであり、サブセットが複数の検出器要素を含み、サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、(v)サブセットの出力信号だけをプロセッサに送出するステップと、(vi)プロセッサに送出された出力信号を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。一実施形態では、決定するステップは、サブアレイの出力信号を分析するステップと、特定の検出器要素の閾値の値よりも大きい出力信号を有するサブアレイの検出器要素を識別するステップとを含む。一実施形態では、サブセットは、検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜50個の検出器要素をさらに含む。この実施形態の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0032】
[0032]本発明は、粒子からの光学散乱又は放射に起因する粒子検出シグニチャを識別及び分析することができる、光学粒子カウンタ及び分析器を含む光学画像化ベース粒子感知システムをさらに提供する。この態様の光学粒子分析器は、(i)電磁放射のビームを生成するための光源と、(ii)粒子を含む流体を電磁放射のビームを通り抜けて流し、それによって散乱又は放射された電磁放射を生成するためのチャンバであり、流体流れが流れの方向によって特徴づけられる、チャンバと、(iii)散乱又は放射された電磁放射の少なくとも一部を収集し、それを2次元検出器のアレイの複数の検出器要素上に導くための光学収集系であり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、光学収集系と、(iv)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャを識別することができる、2次元検出器に動作可能に接続されたプロセッサとを含む。一実施形態では、プロセッサは、さらに、粒子検出シグニチャの形状及び/又は粒子検出シグニチャの出力信号の強度を分析し、粒子のサイズ、形状、及び/又は物理的寸法などの1つ又は複数の粒子の特性の表示を行うことができる。本発明のこの態様のいくつかのシステムでは、散乱又は放射された電磁放射の少なくとも一部を収集し導くための光学収集系は、散乱又は放射された電磁放射の少なくとも一部を2次元検出器の活性区域上に画像化するためのレンズ系などの収集光学系を含む。
【0033】
[0033]本発明の方法では、流体流れは粒子を含む液体の流れである。本発明の方法では、流体流れは粒子を含むガスの流れである。本発明の実施形態では、特定のシステム構成要素と仕様との組合せは、十分に画定された幾何学的形状及び/又は強度分布などの再生可能で容易に識別可能な特徴を有する、粒子散乱事象からの粒子検出シグニチャを生成するように選択される。特定の実施形態では、例えば、ビームを通る粒子の軌道の長さは、0.01ミリメートル〜0.150ミリメートルの範囲にわたって選択される。特定の実施形態では、例えば、2次元検出器は、一辺が3μmから一辺が50μmまでの画素寸法(検出器要素サイズ)を有する。特定の実施形態では、例えば、2次元検出器のアレイは、0.1mm2〜5cm2の範囲にわたって選択された活性区域を有する。特定の実施形態では、例えば、流体流れは、1cm/s〜200cm/sの範囲にわたって選択された流速を有する。特定の実施形態では、例えば、信号の強度プロファイルはレーザビームの強度プロファイルを反映する。
【0034】
[0034]本発明の分析器は、試料の全容積中の粒子を検出及び/又は特性評価するための容量測定光学粒子カウンタ及び分析器を含む。しかし、本発明は、さらに、試料の容積の一部の中の粒子を検出及び/又は特性評価するための非容量測定光学粒子カウンタ及び分析器を含む。
【0035】
[0035]別の態様では、本発明は、(i)粒子を有する流体流れを光学粒子カウンタに供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子を有する流体流れとビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を光学粒子分析器の2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)複数の検出器要素上に導かれた、粒子からの散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定するステップと、(vi)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャの識別の際に粒子検出事象を感知し、それによって光学粒子分析器の誤検出事象を抑制するステップとを含む、光学粒子分析器の誤検出事象を抑制する方法を提供する。この態様の特定の実施形態では、粒子検出シグニチャは、細長い形状を有する検出器要素の出力信号のパターンを含み、実施形態によっては、少なくとも3つの縦方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号を含む。この態様の特定の実施形態では、粒子検出シグニチャは、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの近接する検出器要素の出力信号のパターンを含み、実施形態によっては、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの直接近接する検出器要素の出力信号のパターンを含む。この態様のいくつかの実施形態では、出力信号のパターンは、粒子検出シグニチャの縦方向寸法に沿って設けられた少なくとも2つの近接する検出器要素からの、適宜、直接近接する検出器要素からの出力信号を含む。
【0036】
[0036]別の態様では、本発明は、(i)粒子を有する流体流れを光学粒子カウンタに供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子を有する流体流れとビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を光学粒子分析器の2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)複数の検出器要素上に導かれた、粒子からの散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定するステップと、(vi)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャの識別の際に粒子検出事象を感知し、前記粒子検出シグニチャが縦軸に沿って位置決めされた少なくとも3つの直接近接する検出器要素からの出力信号を含み、それによって粒子散乱事象を光学粒子分析器における他の電磁放射生成又は検出プロセスと区別する、ステップとを含む、粒子散乱事象を光学粒子分析器における他の電磁放射生成又は検出プロセスと区別する方法を提供する。この態様の特定の実施形態では、粒子検出シグニチャは、細長い形状を有する検出器要素の出力信号のパターンを含み、実施形態によっては、少なくとも3つの縦方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号を含む。この態様の特定の実施形態では、粒子検出シグニチャは、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの近接する検出器要素の出力信号のパターンを含み、実施形態によっては、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの直接近接する検出器要素の出力信号のパターンを含む。この態様のいくつかの実施形態では、出力信号のパターンは、粒子検出シグニチャの縦方向寸法に沿って設けられた、少なくとも2つの近接する検出器要素からの、適宜、直接近接する検出器要素からの出力信号を含む。
【0037】
[0037]いかなる理論にも拘束されることを望むことなく、本発明に関連する根本原理の見解又は知識について本明細書で説明される。任意の機械論的説明又は仮説の最終的妥当性にかかわらず、本発明の実施形態はそれにもかかわらず効力があり、有用となり得ることが認識されよう。
【図面の簡単な説明】
【0038】
【図1A】液体試料中の粒子を検出及び/又は特性評価するのに有用な本発明の2次元画像化ベース粒子カウンタの概略図である。
【図1B】液体試料中の粒子の容量分析を行う本発明の2次元画像化ベース粒子カウンタの概略図である。
【図2A】2次元画像化ベース粒子カウンタ100の画像化検出構成要素の平面図であり、整形された電磁放射のビーム110の断面プロファイルの長軸が流体の流れの方向と平行に(矢印によって概略的に示される)向いている光学幾何学的配置の概略図である。
【図2B】2次元画像化ベース粒子カウンタ100の画像化検出構成要素の平面図であり、整形された電磁放射のビーム110の断面プロファイルの長軸が流体の流れの方向に垂直に(矢印によって概略的に示される)向いている光学幾何学的配置の概略図である。
【図3】図1及び2の2次元画像化ベース粒子カウンタを使用して流体中の粒子を検出し、適宜特性評価するための本発明の特定の方法のプロセス流れ図である。
【図4A】本発明のシステムに供給された粒子からの散乱された電磁放射の2次元画像を示すブロック図である。図4Aに示されたグリッド要素は、CCD検出器の個々の画素要素に対応する検出器要素である。
【図4B】図4Aに示された粒子検出シグニチャ530の拡大図である。
【図5A】本発明の方法及びシステムの閾値の値の確立に関連する2次元検出器アレイの検出器要素の雑音分布を示す例示的試験データを示す図である。
【図5B】本発明の方法及びシステムの閾値の値の確立に関連する2次元検出器アレイの検出器要素の雑音分布を示す例示的試験データを示す図である。
【図6】一連の画像解析条件に関する誤りカウント率対閾値の値(標準偏差の雑音の倍数で表された)のプロットである。
【図7A】2次元アレイ検出器及び非垂直検出幾何学的形状を利用する本発明の画像化ベース検出の光学幾何学的配置の平面図である。
【図7B】2次元アレイ検出器及び非垂直検出幾何学的形状を利用する本発明の画像化ベース検出の光学幾何学的配置の側面図である。
【図8】レーザを通過する粒子が検出器上に散乱光ストリークを生成することを示す図である。
【図9】レーザの異なる空間領域を通過する粒子が検出器の異なる空間部分に散乱光ストリークを生成することを示す図である。
【図10】粒子が存在しない場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像である。
【図11】図10からのデータを3次元強度マップとして示す図である。
【図12】単一の粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像である。
【図13】図12からのデータを3次元強度マップとして示す図である。
【図14】バックグラウンドを差し引いた画像を3次元強度マップとして示す図である。
【図15】100nm及び70nmの粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの生の(すなわち、バックグラウンドを差し引いてない)散乱放射強度画像である。
【図16】粒子が存在しない場合に2次元検出器アレイによって観察された、フローセルのバックグラウンドを差し引いた一連の散乱放射強度画像である。
【図17】100nmの粒子のみが存在する(左)並びに70nm及び100nmの粒子が存在する(右)場合に検出された粒子のサイズ分布を示す図である。
【図18】サイズが50、70、80、及び100nmの場合の散乱放射信号対粒子サイズを示すデータの図である。
【図19】2次元及び3次元のバックグラウンドを差し引いた散乱放射強度プロファイルを示す図である。
【図20】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【図21】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【図22】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【図23】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【発明を実施するための形態】
【0039】
[0061]一般に、本明細書で使用される用語及び句は、当業者にとって既知の標準テキスト、雑誌参考文献、及びコンテキストを参照することによって見いだすことができる、当技術分野で認められている意味を有する。以下の定義は本発明のコンテキスト中の特定の使用を明確にするために提供される。
【0040】
[0062]「粒子検出シグニチャ」及び「検出シグニチャ」という表現は、各々が2次元光検出器の検出器アレイの特定の検出器要素の閾値の値以上の出力信号を有する、検出器要素の複数の出力信号を含むパターンを参照する。本発明の粒子検出シグニチャは、粒子によって散乱又は放射された電磁放射の2次元検出によって生成される。粒子検出シグニチャは、粒子を正確に検出及び特性評価するのに有用な幾何学的形状及び/又は強度分布成分を有する。本発明の粒子検出シグニチャは、縦方向成分及び/又は横方向成分に関して特性評価することができる。
【0041】
[0063]「流れの方向」は、流体が流れている場合に流体の大部分が移動している方向と平行な軸を参照する。直線フローセルを通って流れる流体では、流れの方向は流体の大部分が占める経路と平行である。湾曲フローセルを通って流れる流体では、流れの方向は流体の大部分が占める経路の接線であると見なすことができる。
【0042】
[0064]「ビーム伝搬軸」は、電磁放射のビームの進行の方向と平行な軸を参照する。
【0043】
[0065]「断面プロファイル」は、伝搬又は進行の軸に直角に物体を通って切断する平面によって形成されたプロファイルを参照する。例えば、電磁放射のビームの断面プロファイルは、ビーム伝搬軸に垂直な面によって形成されるビームのプロファイルである。フローセルの断面プロファイルは、流れの方向に垂直な面によって形成されるフローセルのプロファイルである。
【0044】
[0066]「長軸」は形状の最長軸と平行な軸を参照する。例えば、楕円の長軸は楕円の最長径と平行であり、長方形の長軸は長方形の長い寸法と平行である。
【0045】
[0067]「短軸」は形状の最短軸と平行な軸を参照する。例えば、楕円の短軸は楕円の最短径と平行であり、長方形の短軸は長方形の短い寸法と平行である。
【0046】
[0068]「光通信」は、光が構成要素間で移動できるように配置された構成要素を参照する。
【0047】
[0069]「光軸」は、電磁放射がシステムを通って伝搬する方向を参照する。
【0048】
[0070]「2次元検出器」は、検出器の活性区域の端から端まで2次元で入力信号(例えば電磁放射)を空間的に分解できる光検出器を参照する。2次元検出器は、画像、例えば、検出器の活性区域の強度パターンに対応する画像を生成することができる。好ましい2次元検出器は、本明細書で画素としても参照される個々の検出器要素のアレイ、例えば、光検出器の2次元アレイ、電荷結合素子(CCD)検出器、相補形金属酸化膜半導体(CMOS)検出器、金属酸化膜半導体(MOS)検出器、能動画素センサ、マイクロチャネルプレート検出器、光電子増倍管の2次元アレイ、フォトダイオードの2次元アレイ、フォトトランジスタの2次元アレイ、光抵抗器の2次元アレイ、又は光伝導薄膜を含む。
【0049】
[0071]「光源」は、試料に電磁放射を送り出すことができるデバイス又はデバイス構成要素を参照する。この用語は、可視光ビームによるなどの可視放射に限定されず、任意の電磁放射も含むように広義に使用される。光源は、いくつか例を挙げると、ダイオードレーザ、ダイオードレーザアレイ、ダイオードレーザ励起固体レーザ、LED、LEDアレイ、気相レーザ、固体レーザなどのレーザ又はレーザのアレイとして具現することができる。
【0050】
[0072]「電磁放射」及び「光」という用語は、本説明において同義的に使用され、電磁場の波を参照する。本発明の方法に有用な電磁放射は、限定はしないが、紫外光、可視光、赤外光、又は約100ナノメートル〜約15ミクロンの間の波長を有するものの任意の組合せを含む。
【0051】
[0073]「粒子を検出する」という表現は、粒子の存在を感知、識別、及び/又は粒子を特性評価することを参照する。実施形態によっては、粒子を検出することは粒子を計数することを参照する。実施形態によっては、粒子を検出することは、直径、断面寸法、形状、サイズ、空気力学的サイズ、又はこれらの任意の組合せなどの粒子の物理的特性を特性評価及び/又は測定することを参照する。
【0052】
[0074]「粒子」は、多くの場合、汚染物質と見なされる小さい物体を参照する。例えば、2つの表面が機械的接触状態になり、機械的運動がある場合、粒子は摩擦行為によって生成される任意の材料であり得る。粒子は、粉塵、汚物、煙、灰、水、すす、金属、鉱物、又はこれら若しくは他の材料若しくは汚染物質の任意の組合せなどの材料の集合体からなることがある。「粒子」は、さらに、生物学的粒子、例えば、ウィルスと、胞子と、バクテリア、菌類、古細菌、原生生物、他の単細胞微生物、及び具体的には1〜15μmの程度のサイズを有する微生物を含む微生物とを参照することができる。粒子は、光を吸収又は散乱し、したがって、光学粒子カウンタによって検出できる任意の小さい物体を参照することができる。本明細書で使用される「粒子」は、搬送流体の個々の原子又は分子、例えば水分子、酸素分子、ヘリウム原子、窒素分子などを除外するように意図される。本発明のいくつかの実施形態では、10nm、20nm、30nm、50nm、100nm、500nmを超える、1μm以上、又は10μm以上のサイズを有する材料の集合体を含む粒子を検出、サイズ分類、及び/又は計数することができる。特定の粒子は、20nm、30nm〜50nm、50nm〜50μmから選択されたサイズ、100nm〜10μmから選択されたサイズ、又は500nm〜5μmから選択されたサイズを有する粒子を含む。
【0053】
[0075]「エアロゾル光学粒子カウンタ」、「光学粒子カウンタ」及び「粒子カウンタ」という用語は本明細書では交換可能に使用され、流体中に浮遊する粒子を検出することができるシステム、流体中に浮遊する粒子のサイズを決定することができるシステム、流体中に浮遊する粒子を計数することができるシステム、流体中に浮遊する粒子を分類することができるシステム、又はこれらの任意の組合せを参照する。典型的な液体又はエアロゾル光学粒子カウンタは、電磁放射のビームを生成するための供給源、流体試料が流れる、例えば、液体又はガスがフローセルを通って流れる領域にビームを導くための光学系などいくつかの構成要素で構成される。典型的な光学粒子カウンタは、さらに、2次元光学検出器などの光検出器と、ビームを通過する粒子によって散乱されるか又は放射される電磁放射を検出するための収集光学系と、電流−電圧変換器並びに信号フィルタ処理及び増幅エレクトロニクスを含む、光検出器によって生成された電気信号の処理及び分析のための他のエレクトロニクスとから構成される。光学粒子カウンタは、さらに、電磁ビームが存在する検出領域に流体試料を導入する流れを生成するためのポンプから構成され得る。
【0054】
[0076]本発明は、流体中の粒子を検出及び特性評価するための2次元画像化ベースの方法及びシステムを提供する。本発明の方法及びシステムは、粒子を正確に検出及び特性評価するのに、並びに誤りカウントを抑制するのに有用な幾何学的形状及び強度分布を有する粒子検出シグニチャを生成、識別及び/又は分析する。
【0055】
[0077]図1Aは、液体試料中の粒子を検出及び/又は特性評価するのに有用な本発明の2次元画像化ベース粒子カウンタ100の概略図を示す。図1Aに示されるように、レーザ又は発光ダイオード光源などの光源105は電磁放射のビーム110を生成し、それは1つ又は複数の集束レンズなどのビーム整形光学系115に導かれる。整形された電磁放射のビーム110は、中に供給される粒子を有する流体流れを閉じ込めるための流れチャンバ122を有するフローセル120に導かれる。電磁放射のビーム110と、フローセル120の流れチャンバ122に供給された流体中の粒子との相互作用により、散乱された電磁放射が生成される。散乱された電磁放射125の一部は、収集光学系130及び135、例えば非球面レンズ系によって収集され、2次元検出器140のアレイの複数の検出器要素上に画像化される。一実施形態では、2次元検出器140は、CCD検出器若しくはカメラ、CMOS検出器、MOS検出器、能動画素センサ、マイクロチャネルプレート検出器、又はフォトダイオードの2次元アレイである。好ましい実施形態では、2次元検出器140は画像カメラシステムである。2次元アレイの検出器要素のうちの少なくとも一部の検出器要素は、散乱又は放射された電磁放射の強度に対応する出力信号を生成する。2次元検出器140の検出器要素からの少なくとも一部の出力信号は、適宜、処理エレクトロニクス145よって測定及び分析される。2次元検出器140及び/又は処理エレクトロニクス145は、各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャを識別及び分析するように構成される。
【0056】
[0078]図示を容易にするために、図1Aは、流れチャンバ122の断面プロファイルの一部だけが電磁放射のビーム110によって照明される光学幾何学的配置を有する本発明の実施形態を例示する。当業者には理解されるように、本発明は、流体を電磁放射のビームにさらすように広範囲の光学幾何学的配置及びビーム寸法を一体化することができる。例えば、本発明は、流れチャンバ122の断面全体のプロファイルが電磁放射のビーム110によって照明され、それによって、容量分析を行う光学幾何学的配置及びビーム寸法を含む。図1Bは、液体試料中の粒子の容量分析を行う本発明の2次元画像化ベース粒子カウンタ200の概略図を示す。図1Bに示されるように、ビーム110は流れチャンバ122に完全に重なり、容量測定を可能にする。
【0057】
[0079]図2A及び2Bは、2次元画像化ベース粒子カウンタ100の画像化ベース検出構成要素の平面図を示す。線描の要素110は、伝搬軸に沿って(紙面の中に及び外に)伝搬する整形された電磁放射のビーム110の断面図を示し、それはフローセル120と交差し、流れチャンバ122に閉じ込められた粒子を含む流体を電磁放射にさらす。図2Aは、整形された電磁放射のビーム110の断面プロファイルの長軸が流体の流れの方向と平行に(矢印に概略的によって示される)向いている光学幾何学的配置の概略図を示し、図2Bは整形された電磁放射ビーム110の断面プロファイルの長軸が流体の流れの方向に垂直に(矢印によって概略的に示される)向いている光学幾何学的配置の概略図を示す。図2A及び2Bは、さらに、フローセル120の流れチャンバ122を通って流れる粒子(図2A及び2Bでは黒丸で概略的に示される)からの散乱された電磁放射を示す光線図を示す。これらの図に示されるように、散乱光は収集光学系130及び135によって収集され、2次元検出器140の2次元アレイ150の複数の個々の検出器要素上に画像化される。図2A及び2Bの光線図によって示されるように、1つ又は複数の粒子によって散乱された電磁放射に関連する空間情報が本2次元画像化技法によって保持される。2次元アレイ150の検出器要素からの信号は、2次元検出器140及び/又は処理エレクトロニクス145によって実時間で処理及び分析され、粒子検出シグニチャが識別及び/又は分析される。
【0058】
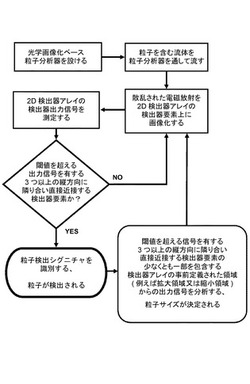
[0080]図3は、図1A及び1Bの2次元画像化ベース粒子分析器を使用して流体中の粒子のサイズを検出し、適宜特性評価するための本発明の特定の方法のプロセス流れ図を示す。この図に示されるように、画像化ベース粒子分析器が設けられ、粒子を含む流体(ガス又は液体)が分析器を通って流れる。流体中の粒子によって散乱された電磁放射は、2次元検出器の2次元アレイの検出器要素上に画像化される。アレイの検出器要素からの出力信号は周期的に測定及び分析され、分析器において粒子からの散乱を示す粒子検出シグニチャが識別される。図3に示された特定の実施形態では、アレイの検出器要素に対応する出力信号が分析されて、粒子検出シグニチャを示す、アレイ中の検出器要素ごとに事前選択された閾値の値よりも大きい出力信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素の発生が識別される。この実施形態の粒子検出シグニチャの識別により、粒子が検出されているという決定がもたらされる。一実施形態では、検出器要素に対応する出力信号を分析して、アレイの特定の検出器要素の雑音の標準偏差よりも2.5倍大きい、適宜、アレイの特定の検出器要素の雑音の標準偏差より2.5〜5倍大きい出力信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素の発生が識別され、それによって粒子検出シグニチャが示され、粒子が検出されたという決定がもたらされる。上述のように、本発明の方法及びシステムは、注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の倍数(例えば2.5倍又は2.5〜5倍)を含む閾値の値を適宜使用することができる。
【0059】
[0081]適宜に、図3に示された方法は、検出器アレイの事前定義された領域、例えば、閾値を超えた信号を有する3つ以上縦方向に隣り合い直接近接する検出器要素又はこれらの検出器要素の一部を包含する領域からの信号を分析するステップをさらに含む。アレイの事前定義された領域は、実施形態によっては、拡張された領域である(すなわち、閾値を超えた信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素以外の追加の検出器要素を含む)。代替として、実施形態によっては、アレイの事前定義された領域は、実施形態によっては、縮小された領域である(すなわち、閾値を超えた信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素のすべてよりも少ない検出器要素を含む)。この実施形態のアレイの事前定義された領域内の検出器要素の出力信号の分析は、限定はしないが、検出器アレイの検出器要素の選択された出力信号を積分するステップと、検出器アレイの検出器要素の選択された出力信号を合計するステップと、検出器アレイの検出器要素の選択された出力信号を平均するステップとを含む一連の信号処理技法によって実行することができる。実施形態によっては、分析のステップは、出力信号から引き出された出力信号又は値を、2次元画像化ベース粒子分析器の較正の際に確立された1つ又は複数の所定の値と比較することによって実行される。アレイの事前定義された領域の検出器要素の出力信号の分析は粒子のサイズの決定をもたらす。
【0060】
[0082]図4Aは、本発明の2次元画像化ベース分析器において粒子によって散乱された電磁放射の2次元画像を示すブロック図を示す。これらの試験で画像化された粒子は125ナノメートルの直径を有するポリスチレンラテックス球体である。図4Aに示されたグリッド要素は、CCD検出器の個々の画素要素に対応する検出器要素である。6つの粒子検出シグニチャ505、510、515、520、525、及び530が画像中に明確に見える。粒子検出シグニチャの異なる位置は、電磁放射のビームを通過する流れチャンバ内の粒子の異なる位置に対応する。本発明のこの実施形態では、粒子検出シグニチャ505、510、515、520、525、及び530は、特定の検出器要素の雑音の標準偏差の3倍よりも大きい出力信号を有する少なくとも3つの隣り合い直接近接する検出器要素の複数の出力信号のパターンを含む。粒子検出シグニチャ530は、例えば、15個の出力信号のパターンを含む。
【0061】
[0083]図4Aに、縦軸570及び横軸575も示されている。粒子検出シグニチャ505、510、515、520、525、及び530の各々は、縦軸570と平行な方向に延びる一連の直接近接する検出器要素を含む縦方向成分によってさらに特徴づけることができる。一実施形態では、例えば、粒子検出シグニチャ505、510、515、520、525、及び530の各々は、縦軸570と平行な方向に延びる最も多い連続の直接近接する検出器要素を含む縦方向成分によってさらに特徴づけることができる。図4Aに示されるように、粒子検出シグニチャ505、510、515、520、525、及び530は引き伸ばされており、形状は実質的に長方形である。具体的には、粒子検出シグニチャ505、510、515、520、525及び530は、縦軸570と平行な方向に延びるより長い縦方向成分及び横軸575と平行な方向に延びるより短い横方向成分によって特徴づけられる。長方形形状のより長い寸法は(すなわち、縦軸570の方向に延びる寸法)は、電磁放射のビームを通る1つ又は複数の粒子の流れの方向に対応する。
【0062】
[0084]図4Bは、図4Aに示された粒子検出シグニチャ530の拡大図を示す。出力信号のパターンの強度値は、X1〜X5、Y1〜Y5、及びZ1〜Z5として示される。X1〜X5、Y1〜Y5、及びZ1〜Z5の各々は、例えば、特定の検出器要素の雑音の標準偏差の少なくとも3倍である値を有する、特定の検出器要素の閾値の値を超える値を有する。出力信号は、X1〜X5、Y1〜Y5、又はZ1〜Z5の特定の組について縦方向に位置合せされている。実施形態によっては、出力信号X1〜X5、Y1〜Y5、及びZ1〜Z5の強度値の分布は、電磁放射のビームと相互作用する1つ又は複数の粒子のサイズ及び/又は形状に関する情報を与える。図4Aにも、縦軸570及び横軸575が示されている。図4Bに示されるように、粒子検出シグニチャ530は、5つの直接近接する検出器要素を含む縦方向成分を有する。粒子検出シグニチャ530の縦方向成分は、一連の検出器要素X1〜X5、Y1〜Y5、及びZ1〜Z5のうちの任意のものを含むことができる。図4Bに示されるように、粒子検出シグニチャ530は、3つの直接近接する検出器要素を含む横方向成分を有する。粒子検出シグニチャ530の横方向成分は、一連の検出器要素X1Y1Z1、X2Y2Z2、X3Y3Z3、X4Y4Z4、及びX5Y5Z5のうちの任意のものを含むことができる。
【0063】
[0085]図5A及び5Bは、本発明の閾値の値の確立に関連する2次元検出器アレイの検出器要素の雑音分布を示す例示的試験データを示す。これらの図では、頻度がy軸にプロットされ、12ビットカウントがx軸にプロットされる。このデータは、5000回さらされた(すなわち5000個のフレーム)検出器アレイの単一の画素からのものである。図5Aはバックグラウンドを示し、それは定常光レベルと雑音の両方を加えたものである。図5Bは定常レベルを差し引き、雑音だけが残っている同じデータを示す。雑音分布の標準偏差は11.4に等しい。この値は、本発明では、閾値の値を確立するのに有用である。一実施形態では、例えば、特定の検出器要素の閾値の値は、特定の検出器要素の雑音分布の標準偏差の約3倍、又はこの実施例では約34.2の値で設定される。
【0064】
[0086]図6は、一連の画像解析条件に関して誤りカウント率対閾値の値(雑音分布の標準偏差の倍数で表わされた)のプロットを示す。(1vert)に対応するプロットは、単一の検出器要素が事前選択された閾値の値に等しいか又はそれを超える場合に粒子検出が決定される従来の粒子検出分析条件に対応する。(2vert)に対応するプロットは、2つの縦方向に直接近接する検出器要素が事前選択された閾値の値に等しいか又はそれを超える場合に粒子検出が決定される分析条件に対応する。したがって、この方法は、特定の閾値の値に等しいか又はそれを超える2つの直接隣り合う近接する検出器要素からの出力信号のパターンを含む粒子検出シグニチャを利用する。(3vert)に対応するプロットは、3つの縦方向に直接近接する検出器要素が事前選択された閾値の値に等しいか又はそれを超える場合に粒子検出が決定される分析条件に対応する。したがって、この方法は、特定の閾値の値に等しいか又はそれを超える3つの直接隣り合う近接する検出器要素からの出力信号のパターンを含む粒子検出シグニチャを利用する。このプロットに示されるように、閾値の値(すなわち、2vertプロット及び3 vertのプロット)を超える複数の縦方向に直接隣り合う検出器要素を有する2次元検出器シグニチャを識別することに基づいた画像解析では、誤りカウントは著しく少なくなる。図6は、さらに、複数の直接隣り合う検出器要素からの出力信号を含む粒子検出シグニチャを使用することにより、閾値の値を著しく低く設定することができるようになり、それによって、より小さい粒子(例えば0.1ミクロン未満の直径)の検出及びサイズ特性評価が可能になることを実証している。
【0065】
[0087]本発明は、以下の非限定の実施例によってさらに理解することができる。
【0066】
実施例1:2次元画像化ベース光学粒子カウンタ
[0088]本発明の画像化ベース光学粒子カウンタの性能が実験的に評価された。この実施例の光学粒子カウンタは、流体流れの粒子から散乱された光の高解像度2次元画像化(例えば液相粒子計数)を可能にするために非垂直光学幾何学的配置を使用する。本明細書で提供される結果は、本画像化ベース光学粒子カウンタが従来の光学粒子カウンタと比較して感度を増強することができる強固な感知プラットフォームを提供することを実証している。
【0067】
[0089]超高純度の脱イオン(DI)水における粒子計数の1つの課題は、多くの状況下で、例えば半導体製作設備又は製薬製造設備で使用されるような試料は非常に清浄であり、一般に少数の非常に小さい粒子を含むことである。脱イオン水は、一般に、イオン不純物を除去するために1つ又は複数のイオン交換樹脂を通過することによって準備され、付加的な微粒子及び他の不純物を除去するためにイオン交換の前又はその後に1回又は複数回フィルタ処理されることがある。超高純度脱イオン水の一般的な粒子濃度は非常に小さく、例えば、0.1ppt(一兆分率)(50nmを超える粒子について容量で1リットル当たり200カウントの粒子)未満である。さらに、いくつかの商業関連の状況では、不揮発性残渣(NVR)、金属イオン及び他のイオンは粒子の濃度を4桁より大きく超える。
【0068】
[0090]従来の光学粒子カウンタでは、搬送流体(例えば水)からの分子散乱が、カウンタが少数の小さい粒子(例えば100ナノメートル未満)を検出及びサイズ特性評価する性能を制限する重要な要因となることがある。高純度条件では、例えば、粒子カウンタの光学検出器によって検出される搬送流体から散乱された放射のレベルは、多くの場合、流体中の粒子からの散乱光の強度よりも大きい。バックグラウンド信号がDC信号であると想定され、阻止される場合、雑音はバックグラウンドの変化に起因し、それによって感度が低下し、誤りカウントの発生が潜在的にもたらされ、それにより粒子カウンタの信頼性が深刻に害されることがある。検出器の雑音の量は、一般に、DC雑音レベルの平方根に比例し、例えば、散乱レベルが4倍だけ増大する場合、雑音レベルは2倍だけ増大することになる。
【0069】
[0091]この制限に対処するために、ある光学粒子カウンタは、試料容積をより小さい区域に分割することによって、検出された分子散乱の総量を低減する。例えば、アレイ検出器を使用することにより、小さい試料容積区域を個々の検出器アレイ要素上にマッピングすることによってより高感度の粒子カウンタが可能になる。しかし、この技法は、一般に、5〜20個の検出器要素を有する1次元アレイ検出器の使用に限定される。本発明は、何千又はさらに何百万もの検出器要素を有する検出器を使用して2次元アレイ検出を実施する。本発明はデジタル信号取得及び処理方法も実施する。
【0070】
[0092]従来のシステムの制限に対処するために、本発明の光学粒子カウンタは試料容積を何千又は何百万の部分に分割し、信号をデジタル化し、高度化された信号処理ソフトウェア及び電子システムを利用して、粒子検出事象を分析する。試料容積を2次元アレイ(例えば100万画素以上のアレイ)上にマッピングすることによって、例えば、まさに高パワーレーザからのバックグラウンド放射レベルは、非常に小さい粒子、例えば、断面寸法が約100nm以下、約70nm以下、約50nm以下、及び/又は約40nm以下の粒子の高感度検出にとって十分に低いままである。本発明のこの態様により、感度の増強をもたらす極めて高パワーの光源を有効に一体化できる。さらに、本粒子カウンタに高性能検出器を組み込むと、信号対雑音比が向上することによって検出感度がさらに向上される。
【0071】
[0093]2次元アレイ検出器を含む粒子センサを使用する1つの利点は、とりわけ、粒子から散乱された放射信号が画素強度の特有のパターンを与え、それにより、粒子散乱事象から生じる信号が、分子散乱又は検出器要素に打ち当たる高エネルギー光子(例えば宇宙線)を含む非粒子信号から効率的に識別されることである。さらに、試料容積が2次元検出器の端から端までマッピングされるとき、光学セルの壁(及び/又は壁上の汚染)からの散乱を効果的に分離し、粒子からの散乱が生じている試料容積の他の区域の検出感度に影響を与えないようにすることができる。
【0072】
[0094]本明細書で説明される粒子センサの別の利点は、動作中に粒子検出事象を記録する能力、例えば2次元アレイ検出器によって検出された画像の保存である。これにより、例えば、さらなる分析及び考察のために粒子検出事象のオフライン分析を可能にすることができる。さらに、本光学粒子カウンタは2次元アレイ検出器を使用してフローセルの直接的視覚化を可能にする。この構成により、実時間最適化、故障の診断・修理、フローセル上又はその中の不純物の検出、及び/又は他の問題の検出が可能になる。
【0073】
[0095]図7A及び7Bは、2次元アレイ検出器及び非垂直検出幾何学的配置を利用する本発明の画像化ベース検出の光学幾何学的配置を示す。図7Aは平面図を示し、図7Bは側面図を示す。レーザ光源610は、狭いビームプロファイル(例えば、レーザビーム長軸がレーザビーム短軸よりも大きい)を有する電磁放射のビーム615を供給し、それは、粒子を含む流体618を有するフローセル620を通して導かれる。粒子は図7A及び7Bにおいて黒円で概略的に示される。これらの図に示されるように、流体618は、事前選択された流れの方向に(点線619で概略的に示される)流れるようにフローセル620に供給される。図7A及び7Bに示された実施形態では、ビームはフローセルからビームストップ630まで通過する。フローセルを通過する粒子はレーザビーム615によって照明されるので、散乱放射が生成され、少なくともその一部がレンズ640を含む光学収集系によって収集され、傾斜した検出器方位で設けられた2次元検出器アレイ650に導かれる。2次元検出器アレイ650のこの検出器方位は、流れの方向619に対するフローセル615に供給されるビーム615の角度によって決定され、散乱された電磁放射が2次元検出器アレイ650の活性区域上で有効に画像化される。
【0074】
[0096]例えば、図8に示されるように、レーザを通過する粒子は、検出器上に散乱光のストリークを生成することになる。図9は、レーザの異なる空間領域を通過する粒子が、検出器の異なる空間部分に散乱光ストリークを生成し、レーザによって照明されたフローセルの2次元図を効果的に与えることを示す。図10は、粒子が存在しない場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像を示し、画像の末端にフローセルの壁から散乱された光が示されている。図11は、図10からのデータを3次元強度マップとして示す。
【0075】
[0097]図12は、単一の粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像を示す。この画像では、粒子はフローセルを通して上から下に流れ、レーザはフローセルを通して左から右に通過する。図13は図12からのデータを3次元強度マップとして示し、粒子検出事象が明確に示されている。粒子が存在する画像から粒子が存在しないバックグラウンド画像を差し引くことによって、事象の信号対雑音比は劇的に向上される。図14は、そのようなバックグラウンドを差し引いた画像を3次元強度マップとして示す。
【0076】
[0098]上述のように、本発明は、バックグラウンド基準フレームが検出事象に対応する画像から差し引かれるシステム及び方法を含む。実施形態によっては、基準フレームは50〜200個の個々のフレームの平均であり、それによって、画素ごとの定常状態バックグラウンド値を表す。これらのバックグラウンド値は検出フレーム(すなわち粒子散乱事象に対応する検出フレーム)から差し引かれ、そのため、過渡信号だけが分析される。バックグラウンド基準フレームの差し引きにより、信号が定常状態バックグラウンド値よりも小さい非常に小さい粒子の検出及びサイズ分類が可能になる。実施形態によっては、基準フレームは連続的に又はある時間間隔で更新される。一実施形態では、例えば、フレーム中の少数の画素は64個のフレームにわたって平均され、新しい値が基準バックグラウンドフレームに取って代わる。一実施形態では、基準フレーム全体がフレームレートに応じて0.5〜3秒にわたって更新される。この態様により、このシステムは、例えば、光学セルの壁への汚染物質の堆積又はフローセルの光学的性質の変化に起因するバックグラウンド散乱光の程度の変化を補償することが可能になる。
【0077】
[0099]図15は、100nm及び70nmの粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの生の(すなわち、バックグラウンドを差し引いていない)散乱放射強度画像を示す。図16は、粒子が存在する場合に2次元検出器アレイによって測定された、フローセルのバックグラウンドを差し引いた一連の散乱放射強度画像である。本発明の実施形態では、粒子からの信号は、検出容積を通る粒子の通路に対応して複数の2次元画像から再構築される。本システム及び方法のこの態様は、非常に正確な粒子サイズの情報をもたらすように分析することができる粒子検出事象の複合画像を生成するのに有用である。実施形態によっては、各粒子散乱事象の複合画像は実時間で記憶及び/又は表示される。実施形態によっては、光学セル中の粒子の位置は実時間で表示される。この態様のいくつかの画像化ベース光学粒子カウンタは、検出された粒子のすべてのワンショット表示を提供する。
【0078】
[00100]図17は、100nmの粒子だけが存在する(左)並びに70nm及び100nmの粒子が存在する(右)場合に検出された粒子のサイズ分布を示す。粒子のサイズが減少するにつれて、検出器に達する粒子検出事象からの散乱放射の量が減少する。図18は、サイズが50、70、80、及び100nmの粒子サイズの場合の散乱放射信号対粒子サイズを示すデータ並びに信号対粒子サイズの理論的予測を示す。図18に示されるように、40nmもの小さい粒子が本画像化ベース光学粒子カウンタを使用して検出可能である。図19は、2次元及び3次元のバックグラウンドを差し引いた散乱放射強度プロファイルを示す。
【0079】
[00101]さらに、より高解像度の検出器アレイを利用することによって、より良好な画像化性能及び感度が、例えば、粒子検出事象当たりより多くの検出器要素を照明することにより達成される。さらに、システム幾何学的配置を最適化することによって、検出器要素は粒子検出事象中により長い間照明され、画像化性能及び感度を強化することができる。さらに、2次元検出器アレイ上のフローセルの画像を拡大することによる光学収集系の最適化によってバックグラウンド散乱信号(及び雑音)を低減することができ、2次元検出器アレイ上の画像の合焦を最適化することによってより小さい粒子検出事象のスポットサイズを達成し、信号レベルをさらに改善することができる。
【0080】
[00102]2次元検出器アレイを利用する本発明の粒子検出システムは、小さい粒子サイズ、例えば30nm以上における高い計数効率とともに、高い試料流量(例えば毎分0.5mL以上)を与えることによる追加の機能強化を提供する。光学検出のためにCMOSセンサを使用するいくつかの実施形態では、センサのサブアレイがデータ取得に使用され、それにより、極めて迅速に読み出し及び処理が行われ、感度のさらなる強化が行われる。実施形態によっては、検出区域をセンサのサブアレイに制限することにより、レーザビームの縁部を通って移送される粒子からの散乱光の測定を防止しながら実質的に均一な高い強度の光を有するレーザビームの中心部分を通過する粒子の測定を可能にし、それによって測定により提供されるサイズ解像度が向上される。
【0081】
[00103]本発明の画像化ベース粒子カウンタは、例えば、基準フレーム比較、粒子スポットサイズ、又はこれらの組合せを使用する較正検証を適宜含む。
【0082】
実施例2:光学粒子計数のための高度化された画像処理法
[00104]本発明の画像化ベース光学粒子カウンタは、約40ナノメートルもの小さい断面寸法をもつ低濃度の粒子の高感度検出及びサイズ特性評価を可能にする高度化された画像処理方法を統合している。この実施例は、粒子検出への従来の画像化ベース手法と比べて機能強化を行う本発明のいくつかの画像化処理方法の説明を与える。本画像処理方法の特徴には、(i)画素選別、ここで、画素がフィルタ処理され、閾値の値(「閾値」)を超える画素及び近接する画素だけが保持及び分析され、粒子サイズ情報が与えられる、(ii)画像化システムによって取得された多数のフレームからの複合画像の生成及び実時間分析、ここで、複数のフレームからの粒子検出事象に関連した画素が組み合わされて複合画像が生成され、それが分析されて粒子サイズ情報が与えられる、(iii)実際の雑音測定値に基づいた画素閾値の値の使用、ここで、各画素(又は、適宜、画素の若干大きいグループ)の雑音が測定され、その画素の検出閾値の値が雑音測定値の所定の倍数(例えば、バックグラウンドの標準偏差又はそれの倍数)に基づくことが含まれる。
【0083】
[00105]図20、21、22、及び23は、流体流れ中の粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図を示す。
【0084】
[00106]図20の流れ図は、基準フレーム及び閾値フレームを生成するための本発明のプロセスを例示する。この図に示されるように、200個の基準フレームが収集され、画素ごとの標準偏差を決定することによって分析され、粒子からの散乱された電磁放射の検出及び分析に有用な閾値フレームが計算される。画素ごとの閾値の値は、粒子からの散乱光がない状態での画素ごとのバックグラウンド信号の変動に基づく統計的分析によって決定されることに留意することが重要である。一実施形態では、例えば、個々の画素ごとのバックグラウンドの雑音の標準偏差値を反映する変動フレームが生成され、可変フレーム乗数(Y)を掛け算されて閾値フレームが決定される。一実施形態では、可変フレーム乗数(Y)は2.5〜7から選択された値である。
【0085】
[00107]図21は粒子を計数するための本発明の方法を例示しており、個々の画素値が読み出され、閾値の値と比較される。上述のように、図20のコンテキストでは、この比較は画素ごとに行われる。特定の画素の値が閾値を超えている場合、分析アルゴリズムは、画素が既存の粒子検出事象と同じ4〜8×10〜14(適宜、6×12)ウィンドウ内にあるかどうか判断し、そうであれば、画素は検出バッファに加えられる。次に、バッファを検査して、3つの隣り合う画素が閾値を超える値を有しているかどうか確かめる。3つの隣り合う画素が閾値を超える値を有していない場合、バッファは消去又はリセットされる。3つ以上の隣り合う画素が閾値を超える値を有する場合、粒子検出事象が識別され、バッファは満たされ続け、必要に応じて画素が読み出される。例えば、少なくとも3つの近接する又は直接近接する画素を含む粒子検出シグニチャがこの態様では使用されて、粒子検出事象が識別され、粒子が計数される。
【0086】
[00108]図22及び23は、検出された粒子のサイズを粒子検出シグニチャの分析によって決定する本発明の方法を例示する。図22は、検出事象の複合画像の生成のプロセスを示す。一実施形態では、検出バッファは分析のためにDSP(例えばプロセッサ)に移される。バッファ中の値が既存の検出事象に対応する画素の2列以内にある場合、バッファは既存の検出事象に加えられ、複合画像が生成される。バッファ中の値が既存の検出事象の画素の2列以内にない場合、バッファは新しい検出事象として指定され、新しい複合画像が生成される。図23は、例えば複合画像として与えられたバッファからのデータを使用して、粒子のサイズを決定するプロセスを示す。まず、集団の中心が計算される。本明細書で使用される集団の中心は、注目する粒子からの散乱された電磁放射を検出する画素からの強度値の信号重み付き中心を参照する。次に、強度値の重み付き中心を中心とした画素のアレイに対応する積分強度値が、例えば、2〜5画素幅及び5〜9行長(適宜、3画素幅及び7行長)に対応して決定される。粒子サイズを決定するために、積分強度値は、基準データ、例えば既知の物理的寸法の標準粒子を使用して実験的に決定された基準データと比較される。
【0087】
[00109]さらに引き続いて行われる説明では、本発明のいくつかの態様に有用な画像化処理ステップ及びアルゴリズムの態様が説明される。
【0088】
[00110]一実施形態では、粒子カウンタは、フローセルを通過するレーザビームをCMOS2次元検出器アレイ上に画像化することによって動作する。画素を読み出し、データをデータ処理システムに伝達するカメラシステムによってCMOSチップは制御される。カメラにより、チップのサブアレイが画定され、他の区域は無視される。注目するサブアレイ、又は注目する領域(ROl)が1行ずつ読み出され、ここで、すべての画素が読み出され、データが移されてしまうまで、第1行からの各画素、次に隣の行からの各画素などが読み出される。画素値のアレイは、まさにデジタルカメラ又はデジタルビデオカメラからの画像のようなフレーム又は画像を構成する。1行が読み出されるとすぐに、画素はリセットされ、隣のフレームのための露光を直ちに始める。実施形態によっては、露光時間を読み出し時間よりも長く設定することが可能である。これはロールシャッターと呼ばれ、その結果、露光時間の長さは画素ごとに同じであるが、最上部の行が露光される実時間は最下部から露光周期だけオフセットされることになる。しかし、画像は連続的であり、露光間に本質的に不感時間はない。
【0089】
[00111]本粒子計数システムの目標は、粒子がレーザビームを通過するときそれらを検出及びサイズ分類することである。これを行うプロセスは従来のアナログシステムに類似しているが、検出及びサイズ分類は2つの別個のステップで実行される。ステップ1は粒子を検出するステップであり、光のパルスを探し、DCバックグラウンドを無視又は阻止することによって行われる。粒子は、最低閾値を超えるのに十分な大きさの光のパルスを生成する場合に検出される。しかし、従来のシステムのように1つの「第1の閾値」だけを有する代わりに、異なる閾値が画素ごとに確立されている。
【0090】
[00112]いくつかの実施形態では、DCレベルは、200〜500個のフレームを取得し、画素ごとに平均値を計算することによって測定される。画素ごとの平均値のアレイは「基準フレーム」と呼ばれ、DCレベルを表す。さらに、すべての画素の変動又は雑音は、このプロセスの一部として測定され、200〜500個のフレームからの値の標準偏差によって表される。画素ごとの標準偏差値のこのアレイは変動フレームと呼ばれる。
【0091】
[00113]「明画素」フレームもある。CCDベースカメラを利用する実施形態では、ガラス−水界面の近くの明るい領域を画像化した画素は飽和レベルの値又はそれに近い値を有することが見いだされた。これらの画素は、飽和レベルの半分未満の値を有する画素よりも多少不規則に振る舞った。したがって、ユーザ定義レベルを超える画素(例えば400〜700個)及びある数の近接する画素(例えば2つの隣り合う画素)は「明画素」として識別され、別の扱いをされ、以下で説明する。
【0092】
[00114]明画素に対応する変動フレームの値はユーザ定義の値が「事前掛け算」されて「変更済み変動フレーム」が生成され、それは、次に、別の係数が掛け算され、基準フレームに加算されて、「閾値フレーム」が生成される。例えば、事前乗数は3であり、乗数は3程度の低さである。これらの値が与えられると、明画素の標準偏差は9が掛け算されることになり、他の「通常の」画素はすべて3が掛け算された標準偏差を有する。したがって、ほとんどの画素では、この値は、閾値を超えるために平均値を標準偏差の3倍だけ超えなければならない。この乗数の値はユーザ設定可能である。
【0093】
[00115]粒子測定が始まった後、閾値フレームは、例えば64個の画素を使用し、50個のフレームにわたってそれらを平均することによって連続的に更新される。次に、これらの64個の画素の平均を使用して基準フレームを更新し、DCレベルのいかなる変化も修正される。例えば、基準フレーム全体が約2秒ごとに更新される。
【0094】
[00116]測定:粒子計数が始まると、連続的な「測定」フレームが収集され、分析される。分析は2つの別個のステップからなる。第1のステップは粒子を「検出する」ことであり、第2のステップは粒子のサイズを決定することである。各フレームは個々に分析されるが、粒子は、レーザビームを通過するのに単一フレームの露光時間よりも長くかかる。したがって、粒子からの信号はいくつかのフレームにわたって広げられていることがあり、それらのフレームを再結合して粒子からの信号全体を表すことができる。本説明では、再結合された信号は「複合画像」と呼ばれる。
【0095】
[00117]第1の測定フレームがフレーム取り込みシステムによってカメラから受け取られると、各画素値はその画素の閾値と比較される。画素が閾値を超えたとき、その画素(値及び場所)は、例えば、6列幅×12行高さである検出バッファに配置される。画素は、バッファの第1行でバッファの列3に「中心を置かれる」。画素が読み出されるにつれて、この6×12ウィンドウに配置されている適切な画素がバッファに配置される。3行が収集された後、バッファを検査して、3つの垂直に隣り合う画素があるかどうか確かめる。yesの場合、バッファは満たしたままとすることができ、noの場合、バッファは消去され、後続の検出のために使用できるようにされる。フレームの端部において、有効に「3個連続」するバッファはすべてDSPに移され、次に消去される。後続のフレームは同じ方法で分析される。
【0096】
[00118]バッファがDSPに移されると、それらは検査されて、既存の検出事象の一部であるかどうか確かめられる。yes(同じ列又はその近く)の場合、画素は事象に加えられて複合画像が生成される。noの場合、新しい事象が生成される。
【0097】
[00119]次に、DSPに記憶された検出事象は検査されて、最近のフレームにおいて変更されたかどうか確かめられる。事象が変更されていた場合、それは別のフレームのために維持される。変更されていなかった場合、事象は完全であると見なされ、信号を計算するプロセスが始まる。
【0098】
[00120]信号を計算する際の第1のステップは、画像の信号重み付き中心を計算することである。その場所が、「rb」(最上部又は最下部の縁部の近くの粒子を廃棄するためのROIのサブセット)設定に対して検査されて、許容された行内にあるかどうか確かめられる。次に、例えば、集団の中心の各側の1列及び集団の中心の上下3行を加えて、3列幅及び7行高さである21画素の長方形を生成することによって、適切な画素が識別される。それらの21画素についてバックグラウンドを差し引いた値が合計され、その値は粒子信号と考えられる。次に、その信号はサイズ閾値と比較され、適切なサイズビンが増加される。
【0099】
[参照による援用及び変形例に関する説明]
[00121]本出願の全体にわたるすべての参考文献、例えば、発行済み特許若しくは登録特許又は均等物を含む特許文献、特許出願公開、及び非特許文献若しくは他の資料は、あたかも各参照が本出願の開示と少なくとも部分的に矛盾しない範囲で参照により個々に組み込まれる(例えば、部分的に矛盾する参照は、参照の部分的に矛盾する部分を除いて参照により組み込まれる)ように、参照により全体が本明細書に組み込まれる。2008年12月2日に出願された、JohnMitchell、Jon Sandberg、及びDwight A. Sehlerによる「Non−OrthogonalParticle Detection Systems andMethods」という名称の米国非仮出願は参照により全体が組み込まれる。
【0100】
[00122]本明細書で使用された用語及び表現は制限のためではなく説明のための用語として使用されており、そのような用語及び表現の使用において図示及び説明された特徴又はそれらの一部のいかなる均等物も排除することを意図していないが、本発明の特許請求の範囲内で様々な改変が可能であることが認識されよう。したがって、本発明は好ましい実施形態、例示的な実施形態、及び任意選択の特徴によって詳細に開示されたが、本明細書で開示された概念の改変及び変形を当業者は用いることができること、並びにそのような改変及び変形は添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることが理解されるべきである。本明細書で提供された特定の実施形態は本発明の有用な実施形態の例であり、本発明は本説明で記載されたデバイス、デバイス構成要素、方法ステップの多数の変形を使用して実行することができることが当業者には明らかであろう。当業者には明らかなように、本方法に有用な方法及びデバイスは多数の任意選択の組成、並びに処理要素及び処理ステップを含むことができる。
【0101】
[00123]範囲、例えば温度範囲、時間範囲、又は組成若しくは濃度範囲が明細書に与えられている場合はいつでも、すべての中間範囲及び部分範囲並びに特定の範囲に含まれるすべての個々の値は本開示に含まれるものである。本明細書の説明に含まれている範囲又は部分範囲の任意の部分範囲又は個々の値は、本明細書の特許請求の範囲から除外できることが理解されるであろう。
【0102】
[00124]明細書で述べられたすべての特許及び刊行物は本発明が関係する当業者の技術レベルを示している。本明細書に引用された参考文献は、それらの刊行又は出願日の時点での最新技術を示すために参照によりそれらの全体が本明細書に組み込まれ、この情報は、必要であれば、先行技術である特定の実施形態を除外するために本明細書で使用することができるものである。例えば、物質組成が請求される場合、実施可能な程度の開示が本明細書で引用された参考文献に提供されている化合物を含めて、出願者の発明に先立って当技術分野において既知で利用可能な化合物は、本明細書の物質組成の特許請求の範囲に含まれるものではないことが理解されるべきである。
【0103】
[00125]本明細書で使用される「含む(comprising)」は、「含む(including)」、「含む(containing)」、又は「によって特徴づけられる(characterizedby)」と同義であり、包括的(inclusive)又は非限定的(open−ended)であり、追加要素、記載されなかった要素、又は方法ステップを排除しない。本明細書で使用される「からなる(consistingof)」は請求項の要素に指定されていないいかなる要素、ステップ、又は成分も排除する。本明細書で使用される「本質的に〜からなる(consistingessentially of)」は、請求項の基本的及び新規な特徴に実質的に影響を与えない材料又はステップを排除しない。本明細書の各例において、「含む(comprising)」、「本質的に〜からなる(consistingessentially of)」、及び「からなる(consisting of)」という用語のいずれも他の2つの用語のいずれかと入れ代わることができる。本明細書で例示として説明された本発明は、本明細書で詳細には開示されていないいかなる1つ又は複数の要素、1つ又は複数の限定がない状態でも適切に実施することができる。
【0104】
[00126]出発原料、生体物質、試薬、合成方法、精製方法、分析方法、検定方法、及び詳細に例示されたもの以外の生物学的方法は、必要以上の実験に頼ることなく本発明の実行において使用することができることが当業者には理解されよう。任意のそのような材料及び方法の当技術分野で既知の機能的均等物のすべては本発明に含まれるものである。使用された用語及び表現は制限のためではなく説明のための用語として使用されており、そのような用語及び表現の使用において図示及び説明された特徴又はそれらの一部のいかなる均等物も排除することを意図していないが、本発明の特許請求の範囲内で様々な改変が可能であることが認識されよう。したがって、本発明は好ましい実施形態によって詳細に開示されたが、本明細書で開示された概念の任意選択の特徴、改変、及び変形を当業者は用いることができること、及びそのような改変及び変形は添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることが理解されるべきである。
【関連出願の相互参照】
【0001】
[0001]本出願は、それぞれ2007年12月4日、2007年12月4日、及び2008年10月22日に出願された米国特許仮出願第60/992,192号、第61/005,336号、及び第61/107,397号の利益を主張するものであり、それらは本説明と矛盾しない範囲で参照によりそれらの全体が本明細書に組み込まれる。
【0002】
[連邦政府による資金提供を受けた研究開発の記載]
[0002]該当せず。
【背景技術】
【0003】
[0003]本発明は光学粒子分析器の分野に関する。本発明は、一般に、流体試料中の粒子を検出及び特性評価するための2次元光学画像化ベースの方法及びシステムに関する。本発明は、さらに、一般に、小さい物理的寸法(例えば0.1ミクロン未満)を有する粒子を正確に検出及び特性評価するように光学粒子分析器の感度及び多用性を改善し、並びにこれらのシステムのデバイス性能を拡大するための方法及びシステムに関する。
【0004】
[0004]微量汚染産業及び清浄製造産業の大部分は、米国特許第3,851,169号、第4,348,111号、第4,957,363号、第5,085,500号、第5,121,988号、第5,467,188号、第5,642,193号、第5,864,399号、第5,920,388号、第5,946,092号、及び第7,053,783号を含む大量の米国特許に記載されているような光学粒子カウンタの使用に依存している。粒子カウンタは米国特許第4,728,190号、第6,859,277号、及び第7,030,980号、第5,282,151号にも記載されており、それらは参照によりそれらの全体が本明細書に組み込まれる。
【0005】
[0005]光学粒子センサ及びカウンタは、半導体産業、製薬産業、及びマイクロエレクトロニクス産業に含まれる様々な産業用途で有用である。ある産業環境では、光学粒子センサ及びカウンタは、例えば、微粒子汚染に関して厳格な規制基準を課せられる医薬品の製造におけるプロセスで使用される材料の組成及び純度を連続的にモニタするための重要な器具を提供する。他の産業環境では、光学粒子センサ及びカウンタは、例えば、高品質フォトレジスト及び半導体材料のオフライン品質管理点検用の品質管理分析を行うための重要な器具を提供する。流体が望ましくない粒子で汚染されている場合、迅速に識別するのは特に有利であり、その結果、プロセスを初期段階で停止し、それによって、欠陥製品の無駄な製造を回避することができる。例えば半導体環境及び他のクリーンルーム環境、又は無菌で純粋な製造(例えば製薬)を必要とする産業では、最終製品を製作するために使用される材料流体は、十分な純度と、流体中に浮遊するいかなる望ましくない粒子も受け入れ可能な許容範囲内にあることとを保証するために連続的にモニタされる。エアロゾル粒子カウンタは、多くの場合、クリーンルーム及びクリーン区域中の浮遊微粒子汚染を測定するために使用される。液相粒子カウンタは、多くの場合、製薬産業、水処理産業、及び化学処理産業において微粒子汚染を測定するために使用される。
【0006】
[0006]粒子モニタセンサの重要性は、信頼性及びスループットを改善し、より小さいサイズを有する粒子の検出及び特性評価を可能にするためにこれらのデバイスの連続的で継続した改善及び発展に反映されている。感度及び粒子サイズ分類能力への制限に加えて、現況技術の光学粒子カウンタは、一般に、検出器雑音及び/又は粒子からの光学散乱以外のプロセスに起因する信号が粒子検出事象によるものである場合に生成される誤りカウントに関連する問題の影響を受けやすい。誤りカウントが発生すると、システムの精度及び感度に悪影響がある。さらに、誤りカウントが発生すると、小さい物理的寸法(例えば0.1ミクロン未満)を有する粒子を正確に検出及び特性評価するための光学粒子分析器の能力も妨げられる。その結果、光学粒子カウンタ及び分析器の誤りカウントを回避又は抑制するための設計方策が、次世代のこれらのデバイスの発展における優先事項と認識されている。
【発明の概要】
【0007】
[0007]本発明は、従来の点ベース及びアレイベース光学粒子カウンタと比較して検出感度の増強及び感知機能性の拡張に達するために2次元光学画像化を使用する粒子検出及び分析のための方法及びシステムを提供する。本発明の方法及びシステムは2次元光学画像化ベース粒子感知プラットフォームを提供し、システム構成要素及び仕様は、システムに供給された粒子からの光学散乱又は放射から、粒子検出シグニチャを含む再生可能で容易に識別可能な信号を生成するように選択される。本発明のシステム及び方法は、液相環境又は気相環境中の粒子を正確に高感度で検出、識別、及び特性評価する(例えば、サイズを決定する)ことができる。本発明のシステム及び方法は、実時間で粒子検出シグニチャを効率的に生成及び識別することができ、それによって、粒子によって散乱又は放射された電磁放射を画像化するように構成された2次元検出器からの出力データの分析及びフィルタ処理が可能になる。
【0008】
[0008]一態様では、本発明の2次元光学画像化方法及びシステムは、2次元検出器のアレイに設けられた複数の検出器要素からの出力信号の十分に規定された1次元又は2次元パターンを含む特有な粒子検出シグニチャを生成することができる。特有な粒子検出シグニチャの生成が、本発明において、粒子からの光学散乱又は放射を、バックグラウンド流体からの分子散乱、検出器雑音、及び/又は電磁放射の注目する粒子との相互作用以外のプロセスから生じる検出器信号と区別するために使用される。本発明のこの態様の特有な粒子検出シグニチャの識別及び特性評価に基づく粒子検出は、粒子計数及びサイズ分類用途にいくつかの性能利益を与える。第1に、特有な粒子検出シグニチャの識別及び特性評価による粒子検出は、高エネルギー光子(例えば宇宙線)、検出器雑音、及び非粒子源からの散乱又は放射など注目する事象の粒子散乱又は放射以外の発生源から生じる検出器信号からの誤りカウントを著しく抑制する。誤りカウントを減少させると、従来の粒子分析器と比較して本粒子検出、計数、及びサイズ分類の測定及びシステムの精度が改善される。第2に、閾値依存粒子検出シグニチャを使用すると、非粒子雑音源に起因する誤りカウントを同時に避けながらより小さい物理的寸法をもつ粒子の検出及び特性評価が可能になる。
【0009】
[0009]一実施形態では、本発明は、2次元光学検出又は画像化を使用して粒子検出シグニチャを生成及び識別することによって、試料中の粒子を検出及び/又は特性評価する方法を提供する。特定の実施形態では、本発明は、(i)選択された流れの方向によって適宜特徴づけられた1つ又は複数の粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、1つ又は複数の粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)複数の検出器要素上に導かれた散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定するステップと、(vi)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャを識別し、それによって流体流れ中の粒子を検出するステップとを含む、流体流れ中の1つ又は複数の粒子を検出する方法を提供する。一実施形態では、この態様の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含み、実施形態によっては、アレイの検出器要素の少なくとも一部が散乱及び/又は放射された電磁放射並びにバックグラウンド散乱電磁放射の強度に対応する出力信号を生成する。この態様の粒子検出シグニチャは、形状、直接隣り合う(directlyadjacent)検出器要素の数を含む検出された要素の数、及び/又はバックグラウンド流体からの分子散乱、検出器雑音、及び粒子散乱又は放射以外のプロセス(例えば宇宙線との相互作用など)に起因する検出器信号を容易に識別及び区別することができる出力信号(例えば強度値)の分布などの明確で再生可能な特徴を有する。一実施形態では、本発明の方法は、粒子検出シグニチャを分析して、粒子のサイズ、形状、及び/又は物理的寸法(例えば、直径、半径、厚さ、長さ、幅、空気動力学的直径など)の特性の表示又は測定値を提供するステップをさらに含む。
【0010】
[0010]当業者には理解されるように、本発明の方法及びシステムは、粒子から散乱又は放射された電磁放射のすべての収集又は検出を、或いは大部分の収集又は検出さえも、必要としない。注目する粒子によって散乱又は放射された電磁放射の一部は、ごく一部の検出でさえも、本発明の方法を実施するのに十分である。例えば、本発明の粒子から散乱又は放射された電磁放射の十分な量の検出には、本発明の2次元検出器上に導かれるか又は画像化されるバックグラウンド電磁放射レベルよりも実質的に大きい強度を有する電磁放射の量の検出が含まれる。
【0011】
[0011]この説明のコンテキストでは、「出力信号」は、検出された電磁放射の強度値に対応する検出器要素からの信号などの2次元検出器の検出器アレイの個々の検出器要素の信号を参照する。出力信号は、時間平均検出器要素出力信号、積分検出器要素出力信号、バックグラウンド成分が差し引かれた出力信号、及び他の信号処理(例えばデータ平滑化など)を受けた出力信号を含む。一実施形態では、例えば、出力信号の各々は、差し引かれるバックグラウンド値を有する。
【0012】
[0012]多くの例では、出力信号から差し引かれるバックグラウンド値は2次元アレイ中の検出器要素ごとに変化する。本明細書で使用される「バックグラウンド値」又は単に「バックグラウンド」という表現は、注目する粒子から散乱及び/又は放射される電磁放射がない状態の検出条件下での検出器要素の1つ又は複数の出力信号を参照する。バックグラウンド値に対応するそのような検出条件には、(i)注目する粒子が電磁放射のビームと相互作用しない検出条件、及び/又は(ii)粒子は電磁放射のビームと相互に作用するが、アレイ中の検出器要素の位置が、検出器要素が粒子からの散乱及び/又は放射された電磁放射を検出しないようなものである検出条件が含まれる。「バックグラウンド値」及び「バックグラウンド」という表現は、注目する粒子からの散乱及び/又は放射される電磁放射がない状態の検出条件での検出器要素の複数の出力信号に対応する平均出力信号値、中心出力信号値、又は中央出力信号値を、例えば、そのような検出条件下での20〜1000個の出力信号測定値に対応する、実施形態によってはそのような検出条件下での20〜500個の出力信号測定値に対応する、平均値、中心値、又は中央値を含む。例えば、いくつかの実施形態におけるバックグラウンド値は、注目する粒子から散乱及び/又は放射される電磁放射がない状態の検出条件での20〜200個の強度測定値の平均に対応し、したがって、個々の検出器要素の「定常状態」の強度値と見なすことができる。
【0013】
[0013]実施形態によっては、出力信号から差し引かれるバックグラウンド値は、アレイ中の検出器要素の位置及び/又は他の試験条件(例えば、光源の強度及びビームプロファイル、流体の組成など)とともに変化する。実施形態によっては、出力信号から差し引かれるバックグラウンド値は粒子分析の間連続的に更新される。例えば、バックグラウンド値は、一実施形態では、粒子検出事象から生じる散乱又は放射された電磁放射を受け取っていない検出器要素からの出力信号の測定及び処理によって連続的に更新される。当業者には理解されるように、粒子検出事象中でさえ、検出器要素のごくわずかの部分しか粒子からの散乱又は放射された電磁放射を受け取り検出しないことがあり、それによって、本発明のいくつかの方法及びシステムでは、アレイ中の他の検出器要素のバックグラウンド値を頻繁に更新することができる。
【0014】
[0014]粒子検出シグニチャは、アレイ中の特定の検出器要素の事前選択された閾値の値よりも大きい出力値を有するという基準を満たす個々の検出器要素(例えば2次元アレイ検出器の画素要素)からの複数の出力信号のパターンを含む。したがって、この閾値依存基準を満たさないアレイの検出器要素からの出力信号は、粒子検出シグニチャを構成する出力信号のパターンの成分ではない。このようにして、本発明の方法及びシステムの粒子検出シグニチャは閾値依存と呼ばれ、「閾値を超える」という表現は、閾値の値を超える出力信号値を有する検出器要素を特に参照する。本発明のいくつかの実施形態では、アレイの個々の検出器要素の閾値の値は同じである。しかし、本発明は、アレイの個々の検出器要素の閾値の値の少なくともいくつかが異なる実施形態を含む。例えば、本発明は、閾値の値がアレイ中の特定の検出器要素の位置とともに変化する方法及びシステムを含む。例えば、一実施形態では、閾値の値は、アレイの個々の検出器要素(例えば2次元検出器の画素)に対応する実際の雑音測定値から導き出される。そのような雑音測定値は、一般に、光源(例えばレーザ)の空間不均一強度プロファイル、光学セルの幾何学的形状、及びいくつかの要因の中で特にシステムの光学要素(例えばレンズ、ウィンドウなど)の光学的特性のために、検出器要素ごとに変化する。本発明の閾値の値は、電磁放射のビームの強度及び/又は検出器利得などのシステムパラメータにより変化することがある。
【0015】
[0015]本発明は、特定の検出器要素の閾値の値が、アレイ中の特定の検出器要素の雑音の測定値、及び/又は注目する粒子によって散乱又は放射される電磁放射がない状態でのアレイ中の特定の検出器要素の出力信号値の測定値(例えば測定されたバックグラウンド値)から導き出される方法及びシステムを含む。特定の検出器要素の測定された雑音レベルの標準偏差よりも大きい閾値の値、又は特定の検出器要素の測定されたバックグラウンド値の標準偏差よりも大きい閾値の値を使用するのは、粒子検出事象を、バックグラウンド流体からの分子散乱、検出器雑音、或いは粒子からの散乱又は放射以外のプロセスに起因する検出器信号と区別するのに有用であり、さらに、非常に小さい物理的寸法(例えば、100ナノメートル未満の直径)を有する粒子を検出するのに有用である。一実施形態では、例えば、アレイ中の特定の検出器要素の閾値の値は、検出器要素の雑音の標準偏差の2.5倍以上であるか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の2.5倍以上である。適宜、いくつかの実施形態では、特定の検出器要素の閾値の値は、検出器要素の雑音の標準偏差の3倍以上であるか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の3倍以上である。適宜、いくつかの実施形態では、特定の検出器要素の閾値の値は検出器要素の雑音の標準偏差の5倍以上であるか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の5倍以上である。一実施形態では、例えば、特定の検出器要素の閾値の値が検出器要素の雑音の標準偏差の2.5〜7倍に等しいか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の2.5〜7倍に等しく、適宜、いくつかの実施形態では、特定の検出器要素の閾値の値が検出器要素の雑音の標準偏差の2.5〜5倍に等しいか、又は注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の2.5〜5倍に等しい。
【0016】
[0016]本発明のいくつかの方法及びシステムでは、閾値の値は、例えば、特定の検出器要素に対して注目する粒子からの散乱又は放射される電磁放射がない状態での検出条件での出力信号値(例えばバックグラウンド値)を時間の関数として測定し、アレイ中の個々の検出器要素に対して雑音を計算することによって実験的に決定される。本明細書で使用される「雑音レベル」又は単に「雑音」という表現は、注目する粒子から散乱及び/又は放射される電磁放射がない状態での検出条件での検出器要素の出力信号と、検出器要素の平均バックグラウンド値、中心バックグラウンド値、又は中央バックグラウンド値との間の差を参照する。したがって、実施形態によっては、雑音又は雑音レベルは、アレイ中の特定の検出器要素のバックグラウンド値の一連の測定値の変動の測定値である。2次元検出器の個々の検出器要素の雑音は、検出器要素のバックグラウンド値を時間の関数として測定することによって決定することができる。本明細書で使用される標準偏差は、測定されたパラメータ(例えば、雑音、バックグラウンド値、又は粒子からの散乱又は放射された放射がない状態での出力信号など)の中央値からのそれの平方自乗平均(RMS)偏差を参照するか、又は測定されたパラメータの変動の平方根を参照する。一実施形態では、例えば、標準偏差(σ)は次の表現の
【数1】
を使用して決定され、ここで、Nは雑音測定値の数であり、特定の検出器要素に対して測定されたバックグラウンド値又は他の出力信号値xiは、特定の検出器要素に対して測定された個々の雑音測定値、バックグラウンド値、又は他の出力信号値を参照し、
【数2】
は特定の検出器要素に対する測定された雑音測定値、バックグラウンド値、又は出力信号値の算術平均である。代替として、閾値の値は、実施形態によっては、例えば検出器雑音及び他の検出器属性を予測/特性評価する方法を最初から使用して理論的に決定される。
【0017】
[0017]本発明の粒子検出シグニチャは、粒子検出シグニチャを含む1空間次元又は2空間次元パターンの出力信号における形状、縦方向寸法、及び/又は横方向寸法に対応する幾何学的成分によって特徴づけられる。このコンテキストで使用される幾何学的形状は、粒子検出シグニチャを含む出力信号のパターンの1次元又は2次元空間分布を含む。幾何学的シグニチャの出力信号は各々個々に検出器アレイ中に十分に画定された位置を有する特定の検出器要素にアドレスされる。したがって、この説明のコンテキストでは、出力信号のパターンの空間分布又は形状は、粒子検出シグニチャの出力信号が個々にアドレスされる検出器要素の空間分布又は形状を参照する。幾何学的形状は、実施形態によっては、粒子検出シグニチャの縦方向寸法に沿って設けられた一連の近接する又は直接近接する検出器要素に対応する縦方向成分、及び/又は粒子検出シグニチャの横寸法に沿って設けられた一連の近接する又は直接近接する検出器要素に対応する横方向成分を有する。一実施形態では、例えば、粒子検出シグニチャは、3つ以上の縦方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号値によって特徴づけられた幾何学的形状を有し、実施形態によっては、5つ以上の縦方向に隣り合い直接近接する検出器要素からの出力信号値によって特徴づけられた幾何学的形状を有する。一実施形態では、例えば、粒子検出シグニチャは、2つ以上の横方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号値によって特徴づけられた幾何学的形状を有し、実施形態によっては、4つ以上の横方向に隣り合い直接近接する検出器要素からの出力信号値によって特徴づけられた幾何学的形状を有する。
【0018】
[0018]検出器画素要素の強度値は、多くの場合、電磁放射のビームを通過する試料の光学的特性、物理的寸法、及び/又は流速などの粒子の特定の特性に、並びに電磁放射のビームの物理的寸法、強度分布、及び形状と、電磁放射の少なくとも一部を検出器アレイ上に導く光学系の設計とを含む粒子検出システムの特定の設計及び動作パラメータに部分的に依存する。対照的に、粒子検出シグニチャの幾何学的形状は、多くの場合、粒子サイズ又は形状とほとんど無関係である。したがって、測定された粒子検出シグニチャの形状は、本発明では、粒子検出事象からの散乱又は放射に対応する検出器アレイ出力信号を、バックグラウンド流体からの分子散乱、検出器雑音、或いは粒子からの光学散乱又は放射以外のプロセスに起因する検出器信号と区別するために使用される。粒子検出シグニチャに対応する画素の強度値の分析は、本方法及びシステムでは、電磁放射のビームを通過する粒子のサイズ、物理的寸法、及び数の測定を行うのにさらに有用である。本発明は、長方形、楕円形、円形、正方形、三角形、又はこれらの形状の任意の組合せを含む一連の形状を有する粒子検出シグニチャの使用を含む。
【0019】
[0019]誤りカウントの発生を抑制するのに、及び粒子が小さい(例えば10ミクロン未満)物理的寸法を有する粒子を検出するのに有用な一実施形態では、本発明の方法及びシステムは、実質的に長方形形状などの細長い形状を有する粒子検出シグニチャを生成する。この態様の粒子検出シグニチャの細長くされた特質は、粒子が電磁放射のビームを通って物理的に移送される(例えば、流体流れ中で移送される)ときに生じる散乱プロセスに少なくとも部分的に由来する。したがって、細長い粒子検出シグニチャの縦方向寸法は、ビームを通過する1つ又は複数の粒子の流れの方向及び軌道に少なくとも部分的に対応する。本発明は、ビームを通って移送される粒子の流速及び軌道が十分に規定されたパラメータであり、縦方向に隣り合い直接近接する検出器要素からの少なくとも3つの閾値を超える出力信号などの、粒子サイズに応じて十分に画定され再生可能な縦方向寸法を有する、実質的に長方形の粒子検出シグニチャなどの細長い粒子検出シグニチャが生成される実施形態を含む。本発明の方法は、細長い寸法に対応する幾何学的シグニチャの縦方向成分に対するいくつかの検出器要素を決定するステップを含む。
【0020】
[0020]実施形態によっては、本発明の方法及びシステムは、直接近接する検出器要素を含めてアレイの近接する検出器要素からの複数の出力信号のパターンを含む粒子検出シグニチャを生成する。この説明のコンテキストでは、「近接する(neighboring)」という表現は互いの5つの検出器要素内に位置決めされた検出器要素を参照し、「直接近接する(directlyneighboring)検出器要素」は、アレイ中で互いに直接隣り合って位置決めされた検出器要素を参照する。近接する及び直接近接する検出器要素は縦方向に隣り合う又は横方向に隣り合うことができる。一実施形態では、粒子検出シグニチャは、少なくとも2つの近接する検出器要素からの出力信号を、実施形態によっては少なくとも2つの直接近接する検出器要素からの出力信号を含む。一実施形態では、粒子検出シグニチャは、2個と20個との間の近接する検出器要素からの出力信号を、実施形態によっては2個と20個との間の直接近接する検出器要素からの出力信号を含む。一実施形態では、粒子検出シグニチャは、2個と7個との間の近接する検出器要素からの出力信号を、実施形態によっては2個と7個との間の直接近接する検出器要素からの出力信号を含む。
【0021】
[0021]いくつかの実施形態で有用な粒子検出シグニチャの幾何学的形状は、縦方向成分及び/又は横方向成分に関してさらに特性評価することができる。本明細書で使用される粒子検出シグニチャの「縦方向成分」又は「横方向成分」は、縦方向寸法若しくは軸又は横方向寸法若しくは軸などの粒子検出シグニチャの選択された軸又は寸法に沿って互いに隣り合って位置決めされる特定の検出器要素の閾値の値以上の出力信号を有する複数の隣り合う、適宜直接隣り合う検出器要素に対応する。例えば、本発明の有用な粒子検出シグニチャは、粒子検出シグニチャの縦方向寸法又は横方向寸法に沿って延びる一連の直接近接する検出器要素を含む検出器要素のパターンを含む。
【0022】
[0022]一実施形態では、粒子検出シグニチャの出力信号のパターンの形状は、粒子検出シグニチャの縦方向寸法に沿って位置決めされた特定の検出器要素の閾値の値以上の出力信号を有する一連の隣り合うか又は直接隣り合う検出器要素に対応する縦方向成分を有する。この態様のいくつかの実施形態では、縦方向成分は、流体の流れの方向に沿って散乱又は放射された電磁放射の強度の分布に対応する。いくつかの用途にとって好ましい一実施形態では、例えば、縦方向成分は、2個と20個との間の近接する検出器要素、適宜、2個と20個との間の直接近接する検出器要素からの閾値を超える出力信号を含む。一実施形態では、粒子検出シグニチャの出力信号のパターンは、縦方向成分に垂直に向いた横方向成分を有する。いくつかの用途にとって好ましい一実施形態では、例えば、横方向成分は、2個と10個との間の近接する検出器要素、適宜、2個と10個との間の直接近接する検出器要素からの閾値を超える出力信号を含む。
【0023】
[0023]本発明のいくつかの方法及びシステムの粒子検出シグニチャは、粒子検出シグニチャの閾値基準を満たす、アレイの個々の検出器要素によって受け取られた散乱又は放射された電磁放射の強度に対応する出力信号値などの出力信号値の1次元又は2次元空間分布によって特徴づけられる。粒子検出シグニチャのそのような強度分布は、本方法及びシステムで分析して、粒子のサイズ、形状、及び/又は物理的寸法(直径、半径、厚さ、長さ、幅、空気動力学的直径など)などの粒子の特性の決定又は測定を行うことができる。測定された粒子検出シグニチャの強度分布を本発明でさらに使用して、注目する粒子からの散乱又は放射に対応する検出器アレイ出力信号を、バックグラウンド流体からの分子散乱、検出器雑音、或いは粒子からの光学散乱又は放射以外のプロセスから生じる検出器信号と区別することができる。強度分布成分(例えば、1次元又は2次元強度分布)の分析は、限定はしないが、パターン認識分析、画像閾値分析、及び/又は画像形状分析を含む本発明のいくつかの分析技法を介して実行することができる。一実施形態では、粒子検出シグニチャは、検出シグニチャの出力信号の平均値、又は検出シグニチャの最大出力信号を包含する部分などのシグニチャの一部の出力信号の平均値を計算することによって分析される。一実施形態では、粒子検出シグニチャは、検出シグニチャの出力信号の積分強度値、又は検出シグニチャの出力信号の最大強度値を包含する部分などのシグニチャの一部の出力信号の積分強度値を計算することによって分析される。一実施形態では、粒子検出シグニチャは、検出シグニチャ又はシグニチャの一部の出力信号の強度の重み付き中心を決定すること、適宜、強度の重み付き中心に対応する検出器要素の出力信号を決定すること、又は強度の重み付き中心に対応する検出器要素の出力信号を囲み且つ含む出力信号の分布に対応する平均強度を決定することによって分析される。一実施形態では、粒子検出シグニチャは、検出シグニチャに対応する検出器要素のサイズ、形状、及び/又は数を決定することによって分析される。
【0024】
[0024]一実施形態では、粒子は、少なくとも3つの縦方向に隣り合い直接近接する検出器要素を、実施形態によっては3〜100個の縦方向に隣り合い直接近接する検出器要素を有する粒子検出シグニチャを識別することによって検出される。この態様では、粒子検出シグニチャの識別は粒子検出事象を効果的に識別し、それによって粒子が計数され、例えばサイズに関して分析され得るようにする手段を提供する。実施形態によっては、粒子サイズなどの検出された粒子の特性は、その後、粒子検出シグニチャの分析によって決定される。一実施形態では、例えば、この分析は、粒子検出シグニチャの最大出力信号値を決定するステップを含む。一実施形態では、例えば、この分析は、粒子検出シグニチャを含む出力信号の平均出力信号値を決定するステップを含む。一実施形態では、例えば、この分析は、粒子検出シグニチャを含む出力信号の少なくとも一部の、実施形態によってはそれのすべての、積分出力信号値を決定するステップを含む。一実施形態では、例えば、この分析は、粒子検出シグニチャを含む出力信号の少なくとも一部の、実施形態によってはそれのすべての、出力信号値の重み付き中心を決定するステップを含む。適宜、この態様の方法及びシステムは、重み付き中心に対応する出力信号に対応する出力信号値及び/又は検出器要素を識別するステップをさらに含む。適宜、この態様の方法及びシステムは、重み付き中心を含む隣り合い直接近接する検出器要素に対応する複数の出力信号、例えば重み付き中心を囲む隣り合い直接近接する検出器要素からの複数の出力信号に対応する平均出力信号値及び/又は積分出力信号値を識別するステップをさらに含む。一実施形態では、例えば、分析のステップは、重み付き中心を囲む10個以上の出力信号値に対応するか、又は適宜、重み付き中心を囲む20個以上の出力信号値に対応する積分出力信号値を決定するステップを含む。一実施形態では、例えば、分析のステップは、アレイ中の検出器要素の3〜10列×7〜15行のアレイによって特徴づけられる隣り合い直接近接する検出器要素に対応する重み付き中心を囲む出力信号値に対応する積分出力信号値又は平均出力信号値を決定するステップを含む。この態様の方法では、出力信号値、平均出力信号値、積分出力信号値、又はこれらの任意の組合せは、例えば、アルゴリズム、実験的な若しくは計算された基準値の表、又は出力信号値、平均出力信号値、積分出力信号値を粒子サイズに関連づける他の相関性を使用して粒子のサイズを決定するために使用される。本発明は、粒子検出シグニチャの分析が上述のような複数のステップ、プロセス、及び技法を実行することによって達成される方法及びシステムを含む。
【0025】
[0025]一実施形態では、本発明の方法は、(i)所定のサイズの基準粒子を有する流体流れを供給するステップと、(ii)基準粒子を有する流体流れを電磁放射のビームにさらすステップであり、基準粒子とビームとの間の相互作用が基準粒子からの散乱又は放射された電磁放射を生成する、ステップと、(iii)基準粒子からの散乱又は放射された電磁放射の少なくとも一部を2次元検出器の活性区域の検出器要素のアレイ上に導くステップと、(iv)複数の検出器要素上に導かれた基準粒子からの散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定し、それによって、基準粒子によって散乱された電磁放射の強度の基準粒子検出シグニチャを生成するステップであり、基準粒子検出シグニチャが検出器要素の出力信号の基準パターンを含む、ステップとをさらに含む。一実施形態では、粒子検出シグニチャを識別及び/又は分析するステップは、粒子検出シグニチャの出力信号のパターンを基準粒子検出シグニチャと比較するステップを含む。
【0026】
[0026]別の実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素のサブセットを決定するステップであり、サブセットが複数の検出器要素を含み、サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、(vi)サブセットの出力信号だけをプロセッサに送出するステップと、(vii)プロセッサに送出された出力信号を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。この態様のいくつかの方法では、検出器要素は、検出器要素の閾値の値を超える出力信号だけが事前フィルタ処理され、その結果、適宜、近接する及び/又は直接近接する検出器要素からの出力信号が送出及び処理される。本発明のいくつかの方法では、決定するステップは、2次元検出器の検出器要素の出力信号を分析するステップと、特定の検出器要素の閾値の値よりも大きい出力信号を有する検出器要素を識別するステップとを含む、本明細書で使用される「サブセット」という用語は、CMOS検出器などの2次元検出器の検出器要素のすべてではなく一部を参照し、実施形態によっては粒子から散乱又は放射された電磁放射を検出する検出器要素を参照する。いくつかの方法では、サブセットはアレイの少なくとも3つの近接する又は直接近接する検出器要素を含み、適宜、サブセットはアレイの少なくとも10個の近接する又は直接近接する検出器要素を含む。いくつかの方法では、サブセットはアレイの2〜7個の近接する又は直接近接する検出器要素を含み、適宜、サブセットはアレイの2〜20個の近接する又は直接近接する検出器要素を含む。一実施形態では、サブセットは、検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜50個又は適宜1〜50個の検出器要素をさらに含む。
【0027】
[0027]この態様の一実施形態では、アレイの検出器要素の出力信号は処理される信号であり、例えば、出力信号の各々はアレイの特定の検出器要素について差し引かれるバックグラウンド値を有する。この態様のいくつかの実施形態では、差し引かれるバックグラウンド値の各々は、注目する粒子がビームに供給されない検出条件でのアレイ中の特定の検出器要素の平均出力信号に対応する。一実施形態では、最小閾値の値はアレイ中の異なる検出器要素で変化する。一実施形態では、例えば、アレイ中の特定の検出器要素の閾値の値はアレイの特定の検出器要素の雑音の標準偏差の2.5倍以上であり、適宜、アレイ中の特定の検出器要素の閾値の値はアレイの特定の検出器要素の雑音の標準偏差の2.5〜7倍に等しい。一実施形態では、この態様の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0028】
[0028]別の実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)散乱又は放射された電磁放射の少なくとも一部を検出するステップと、(v)複数の検出フレームを生成するステップであり、各検出フレームが特定の時間間隔で検出器要素の複数の出力信号を含む、ステップと、(vi)散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する複数の検出フレームを組み合わせて、粒子検出事象の複合画像を生成するステップと、(vii)複合画像を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。本明細書で使用される複合画像は、複数の検出フレーム、適宜、単一の粒子検出事象に対応する検出フレームの出力信号の少なくとも一部の組合せに由来するデータポイントの複合物を参照する。実施形態によっては、例えば、粒子からの散乱又は放射は多数の検出フレームにわたって取り込まれ、各フレームからの出力信号の少なくとも一部を組み合わせて粒子からの散乱の複合画像が生成される。実施形態によっては、複合画像を分析して粒子のサイズ又は他の物理的寸法が決定される。本明細書で使用される「検出フレーム」は、2次元検出器の少なくとも一部の複数の出力信号を、適宜、2次元検出器のサブアレイ又は2次元検出器の検出器要素のサブセットからの複数の出力信号を参照する。このように、検出フレームは、粒子を含む流体によって散乱、放射、又は送出された電磁放射の複数の個々の測定値に対応する。
【0029】
[0029]この実施形態の方法は、粒子によって散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する検出フレームを識別するステップをさらに含む。実施形態によっては、検出フレームは、0.5kHz〜20kHzの速度で生成され、適宜、用途によっては0.1kHz〜2kHzの速度で生成される。いくつかの方法では、検出フレームの各々は50μs〜2msの時間間隔に対応する。一実施形態では、1〜100個の検出フレームが組み合わされて複合画像が生成され、適宜、用途によっては1〜20個の検出フレームが組み合わされて複合画像が生成される。この実施形態のいくつかの方法は、検出フレームの各々から基準フレームを差し引くステップをさらに含む。本明細書で使用される基準フレームという用語は、アレイ(又はサブセット若しくはそれのサブアレイ)中の検出器要素の複数のバックグラウンド出力信号を参照し、各バックグラウンド出力信号は、注目する粒子がビームに供給されない検出条件でのアレイ中の特定の検出器要素の平均出力信号である。このように、基準フレームは、流体によって散乱、放射、又は送出された電磁放射の複数の個々の測定値、及び/又は注目する粒子がない状態での光学粒子カウンタシステムに対応する。一実施形態では、基準フレームは、注目する粒子がない状態の検出条件に対応する50〜200個の個々のフレームの平均であり、したがって、アレイ又はそれのサブセット若しくはサブアレイの検出器要素ごとの定常状態値を表す。検出フレームから基準フレームを差し引くことにより、ある条件下で、検出器要素の定常状態値よりも少ない散乱又は放射された光信号を生成する小さい粒子の検出及びサイズ分類が可能になる。適宜、基準フレームはいくつかの方法で連続的に更新される。この実施形態の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0030】
[0030]別の実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)2次元検出器のサブアレイを使用して散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、サブアレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)サブアレイ又はそれの一部に対応する検出器要素の出力信号だけをプロセッサに送出するステップと、(vi)プロセッサに送出された出力信号を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。本明細書で使用される「サブアレイ」という用語は、2次元検出器のアレイの一部を参照する。サブアレイからの出力信号を利用する本発明の方法により、2次元検出器の活性区域の縮小された区域を非常に迅速に読み出す能力が可能になり、それによって、粒子の計数及びサイズ分類のための高頻度及び高感度の測定が実現される。一実施形態では、例えば、サブアレイは2次元検出器の検出器要素の0.2%〜25%を含み、適宜、サブアレイは2次元検出器の検出器要素の0.2%〜10%を含む。一実施形態では、例えば、サブアレイは、32×176の検出要素を含み、適宜、いくつかの用途では64×576の検出要素を含む。一実施形態では、2次元検出器は400000〜1300000個の検出要素を有し、適宜、CMOS検出器である。この実施形態の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0031】
[0031]一実施形態では、本発明は、(i)粒子を有する流体流れを供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子とビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(ii)散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iii)2次元検出器のサブアレイを使用して散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、サブアレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)サブアレイの検出器要素のサブセットを決定するステップであり、サブセットが複数の検出器要素を含み、サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、(v)サブセットの出力信号だけをプロセッサに送出するステップと、(vi)プロセッサに送出された出力信号を分析し、それによって粒子を検出するステップとを含む流体流れ中の粒子を検出する方法を提供する。一実施形態では、決定するステップは、サブアレイの出力信号を分析するステップと、特定の検出器要素の閾値の値よりも大きい出力信号を有するサブアレイの検出器要素を識別するステップとを含む。一実施形態では、サブセットは、検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜50個の検出器要素をさらに含む。この実施形態の方法は、散乱又は放射された電磁放射の少なくとも一部をアレイの検出器要素上に画像化するステップをさらに含む。
【0032】
[0032]本発明は、粒子からの光学散乱又は放射に起因する粒子検出シグニチャを識別及び分析することができる、光学粒子カウンタ及び分析器を含む光学画像化ベース粒子感知システムをさらに提供する。この態様の光学粒子分析器は、(i)電磁放射のビームを生成するための光源と、(ii)粒子を含む流体を電磁放射のビームを通り抜けて流し、それによって散乱又は放射された電磁放射を生成するためのチャンバであり、流体流れが流れの方向によって特徴づけられる、チャンバと、(iii)散乱又は放射された電磁放射の少なくとも一部を収集し、それを2次元検出器のアレイの複数の検出器要素上に導くための光学収集系であり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、光学収集系と、(iv)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャを識別することができる、2次元検出器に動作可能に接続されたプロセッサとを含む。一実施形態では、プロセッサは、さらに、粒子検出シグニチャの形状及び/又は粒子検出シグニチャの出力信号の強度を分析し、粒子のサイズ、形状、及び/又は物理的寸法などの1つ又は複数の粒子の特性の表示を行うことができる。本発明のこの態様のいくつかのシステムでは、散乱又は放射された電磁放射の少なくとも一部を収集し導くための光学収集系は、散乱又は放射された電磁放射の少なくとも一部を2次元検出器の活性区域上に画像化するためのレンズ系などの収集光学系を含む。
【0033】
[0033]本発明の方法では、流体流れは粒子を含む液体の流れである。本発明の方法では、流体流れは粒子を含むガスの流れである。本発明の実施形態では、特定のシステム構成要素と仕様との組合せは、十分に画定された幾何学的形状及び/又は強度分布などの再生可能で容易に識別可能な特徴を有する、粒子散乱事象からの粒子検出シグニチャを生成するように選択される。特定の実施形態では、例えば、ビームを通る粒子の軌道の長さは、0.01ミリメートル〜0.150ミリメートルの範囲にわたって選択される。特定の実施形態では、例えば、2次元検出器は、一辺が3μmから一辺が50μmまでの画素寸法(検出器要素サイズ)を有する。特定の実施形態では、例えば、2次元検出器のアレイは、0.1mm2〜5cm2の範囲にわたって選択された活性区域を有する。特定の実施形態では、例えば、流体流れは、1cm/s〜200cm/sの範囲にわたって選択された流速を有する。特定の実施形態では、例えば、信号の強度プロファイルはレーザビームの強度プロファイルを反映する。
【0034】
[0034]本発明の分析器は、試料の全容積中の粒子を検出及び/又は特性評価するための容量測定光学粒子カウンタ及び分析器を含む。しかし、本発明は、さらに、試料の容積の一部の中の粒子を検出及び/又は特性評価するための非容量測定光学粒子カウンタ及び分析器を含む。
【0035】
[0035]別の態様では、本発明は、(i)粒子を有する流体流れを光学粒子カウンタに供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子を有する流体流れとビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を光学粒子分析器の2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)複数の検出器要素上に導かれた、粒子からの散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定するステップと、(vi)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャの識別の際に粒子検出事象を感知し、それによって光学粒子分析器の誤検出事象を抑制するステップとを含む、光学粒子分析器の誤検出事象を抑制する方法を提供する。この態様の特定の実施形態では、粒子検出シグニチャは、細長い形状を有する検出器要素の出力信号のパターンを含み、実施形態によっては、少なくとも3つの縦方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号を含む。この態様の特定の実施形態では、粒子検出シグニチャは、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの近接する検出器要素の出力信号のパターンを含み、実施形態によっては、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの直接近接する検出器要素の出力信号のパターンを含む。この態様のいくつかの実施形態では、出力信号のパターンは、粒子検出シグニチャの縦方向寸法に沿って設けられた少なくとも2つの近接する検出器要素からの、適宜、直接近接する検出器要素からの出力信号を含む。
【0036】
[0036]別の態様では、本発明は、(i)粒子を有する流体流れを光学粒子カウンタに供給するステップと、(ii)流体流れを電磁放射のビームにさらすステップであり、粒子を有する流体流れとビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、(iii)散乱又は放射された電磁放射の少なくとも一部を光学粒子分析器の2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、(iv)複数の検出器要素上に導かれた、粒子からの散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、アレイの検出器要素の少なくとも一部が散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、(v)アレイの検出器要素の少なくとも一部の出力信号を測定するステップと、(vi)各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャの識別の際に粒子検出事象を感知し、前記粒子検出シグニチャが縦軸に沿って位置決めされた少なくとも3つの直接近接する検出器要素からの出力信号を含み、それによって粒子散乱事象を光学粒子分析器における他の電磁放射生成又は検出プロセスと区別する、ステップとを含む、粒子散乱事象を光学粒子分析器における他の電磁放射生成又は検出プロセスと区別する方法を提供する。この態様の特定の実施形態では、粒子検出シグニチャは、細長い形状を有する検出器要素の出力信号のパターンを含み、実施形態によっては、少なくとも3つの縦方向に隣り合い直接近接する検出器要素からの閾値を超える出力信号を含む。この態様の特定の実施形態では、粒子検出シグニチャは、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの近接する検出器要素の出力信号のパターンを含み、実施形態によっては、特定の検出器要素の閾値の値以上の出力信号を有する少なくとも2つの直接近接する検出器要素の出力信号のパターンを含む。この態様のいくつかの実施形態では、出力信号のパターンは、粒子検出シグニチャの縦方向寸法に沿って設けられた、少なくとも2つの近接する検出器要素からの、適宜、直接近接する検出器要素からの出力信号を含む。
【0037】
[0037]いかなる理論にも拘束されることを望むことなく、本発明に関連する根本原理の見解又は知識について本明細書で説明される。任意の機械論的説明又は仮説の最終的妥当性にかかわらず、本発明の実施形態はそれにもかかわらず効力があり、有用となり得ることが認識されよう。
【図面の簡単な説明】
【0038】
【図1A】液体試料中の粒子を検出及び/又は特性評価するのに有用な本発明の2次元画像化ベース粒子カウンタの概略図である。
【図1B】液体試料中の粒子の容量分析を行う本発明の2次元画像化ベース粒子カウンタの概略図である。
【図2A】2次元画像化ベース粒子カウンタ100の画像化検出構成要素の平面図であり、整形された電磁放射のビーム110の断面プロファイルの長軸が流体の流れの方向と平行に(矢印によって概略的に示される)向いている光学幾何学的配置の概略図である。
【図2B】2次元画像化ベース粒子カウンタ100の画像化検出構成要素の平面図であり、整形された電磁放射のビーム110の断面プロファイルの長軸が流体の流れの方向に垂直に(矢印によって概略的に示される)向いている光学幾何学的配置の概略図である。
【図3】図1及び2の2次元画像化ベース粒子カウンタを使用して流体中の粒子を検出し、適宜特性評価するための本発明の特定の方法のプロセス流れ図である。
【図4A】本発明のシステムに供給された粒子からの散乱された電磁放射の2次元画像を示すブロック図である。図4Aに示されたグリッド要素は、CCD検出器の個々の画素要素に対応する検出器要素である。
【図4B】図4Aに示された粒子検出シグニチャ530の拡大図である。
【図5A】本発明の方法及びシステムの閾値の値の確立に関連する2次元検出器アレイの検出器要素の雑音分布を示す例示的試験データを示す図である。
【図5B】本発明の方法及びシステムの閾値の値の確立に関連する2次元検出器アレイの検出器要素の雑音分布を示す例示的試験データを示す図である。
【図6】一連の画像解析条件に関する誤りカウント率対閾値の値(標準偏差の雑音の倍数で表された)のプロットである。
【図7A】2次元アレイ検出器及び非垂直検出幾何学的形状を利用する本発明の画像化ベース検出の光学幾何学的配置の平面図である。
【図7B】2次元アレイ検出器及び非垂直検出幾何学的形状を利用する本発明の画像化ベース検出の光学幾何学的配置の側面図である。
【図8】レーザを通過する粒子が検出器上に散乱光ストリークを生成することを示す図である。
【図9】レーザの異なる空間領域を通過する粒子が検出器の異なる空間部分に散乱光ストリークを生成することを示す図である。
【図10】粒子が存在しない場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像である。
【図11】図10からのデータを3次元強度マップとして示す図である。
【図12】単一の粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像である。
【図13】図12からのデータを3次元強度マップとして示す図である。
【図14】バックグラウンドを差し引いた画像を3次元強度マップとして示す図である。
【図15】100nm及び70nmの粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの生の(すなわち、バックグラウンドを差し引いてない)散乱放射強度画像である。
【図16】粒子が存在しない場合に2次元検出器アレイによって観察された、フローセルのバックグラウンドを差し引いた一連の散乱放射強度画像である。
【図17】100nmの粒子のみが存在する(左)並びに70nm及び100nmの粒子が存在する(右)場合に検出された粒子のサイズ分布を示す図である。
【図18】サイズが50、70、80、及び100nmの場合の散乱放射信号対粒子サイズを示すデータの図である。
【図19】2次元及び3次元のバックグラウンドを差し引いた散乱放射強度プロファイルを示す図である。
【図20】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【図21】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【図22】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【図23】粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図である。
【発明を実施するための形態】
【0039】
[0061]一般に、本明細書で使用される用語及び句は、当業者にとって既知の標準テキスト、雑誌参考文献、及びコンテキストを参照することによって見いだすことができる、当技術分野で認められている意味を有する。以下の定義は本発明のコンテキスト中の特定の使用を明確にするために提供される。
【0040】
[0062]「粒子検出シグニチャ」及び「検出シグニチャ」という表現は、各々が2次元光検出器の検出器アレイの特定の検出器要素の閾値の値以上の出力信号を有する、検出器要素の複数の出力信号を含むパターンを参照する。本発明の粒子検出シグニチャは、粒子によって散乱又は放射された電磁放射の2次元検出によって生成される。粒子検出シグニチャは、粒子を正確に検出及び特性評価するのに有用な幾何学的形状及び/又は強度分布成分を有する。本発明の粒子検出シグニチャは、縦方向成分及び/又は横方向成分に関して特性評価することができる。
【0041】
[0063]「流れの方向」は、流体が流れている場合に流体の大部分が移動している方向と平行な軸を参照する。直線フローセルを通って流れる流体では、流れの方向は流体の大部分が占める経路と平行である。湾曲フローセルを通って流れる流体では、流れの方向は流体の大部分が占める経路の接線であると見なすことができる。
【0042】
[0064]「ビーム伝搬軸」は、電磁放射のビームの進行の方向と平行な軸を参照する。
【0043】
[0065]「断面プロファイル」は、伝搬又は進行の軸に直角に物体を通って切断する平面によって形成されたプロファイルを参照する。例えば、電磁放射のビームの断面プロファイルは、ビーム伝搬軸に垂直な面によって形成されるビームのプロファイルである。フローセルの断面プロファイルは、流れの方向に垂直な面によって形成されるフローセルのプロファイルである。
【0044】
[0066]「長軸」は形状の最長軸と平行な軸を参照する。例えば、楕円の長軸は楕円の最長径と平行であり、長方形の長軸は長方形の長い寸法と平行である。
【0045】
[0067]「短軸」は形状の最短軸と平行な軸を参照する。例えば、楕円の短軸は楕円の最短径と平行であり、長方形の短軸は長方形の短い寸法と平行である。
【0046】
[0068]「光通信」は、光が構成要素間で移動できるように配置された構成要素を参照する。
【0047】
[0069]「光軸」は、電磁放射がシステムを通って伝搬する方向を参照する。
【0048】
[0070]「2次元検出器」は、検出器の活性区域の端から端まで2次元で入力信号(例えば電磁放射)を空間的に分解できる光検出器を参照する。2次元検出器は、画像、例えば、検出器の活性区域の強度パターンに対応する画像を生成することができる。好ましい2次元検出器は、本明細書で画素としても参照される個々の検出器要素のアレイ、例えば、光検出器の2次元アレイ、電荷結合素子(CCD)検出器、相補形金属酸化膜半導体(CMOS)検出器、金属酸化膜半導体(MOS)検出器、能動画素センサ、マイクロチャネルプレート検出器、光電子増倍管の2次元アレイ、フォトダイオードの2次元アレイ、フォトトランジスタの2次元アレイ、光抵抗器の2次元アレイ、又は光伝導薄膜を含む。
【0049】
[0071]「光源」は、試料に電磁放射を送り出すことができるデバイス又はデバイス構成要素を参照する。この用語は、可視光ビームによるなどの可視放射に限定されず、任意の電磁放射も含むように広義に使用される。光源は、いくつか例を挙げると、ダイオードレーザ、ダイオードレーザアレイ、ダイオードレーザ励起固体レーザ、LED、LEDアレイ、気相レーザ、固体レーザなどのレーザ又はレーザのアレイとして具現することができる。
【0050】
[0072]「電磁放射」及び「光」という用語は、本説明において同義的に使用され、電磁場の波を参照する。本発明の方法に有用な電磁放射は、限定はしないが、紫外光、可視光、赤外光、又は約100ナノメートル〜約15ミクロンの間の波長を有するものの任意の組合せを含む。
【0051】
[0073]「粒子を検出する」という表現は、粒子の存在を感知、識別、及び/又は粒子を特性評価することを参照する。実施形態によっては、粒子を検出することは粒子を計数することを参照する。実施形態によっては、粒子を検出することは、直径、断面寸法、形状、サイズ、空気力学的サイズ、又はこれらの任意の組合せなどの粒子の物理的特性を特性評価及び/又は測定することを参照する。
【0052】
[0074]「粒子」は、多くの場合、汚染物質と見なされる小さい物体を参照する。例えば、2つの表面が機械的接触状態になり、機械的運動がある場合、粒子は摩擦行為によって生成される任意の材料であり得る。粒子は、粉塵、汚物、煙、灰、水、すす、金属、鉱物、又はこれら若しくは他の材料若しくは汚染物質の任意の組合せなどの材料の集合体からなることがある。「粒子」は、さらに、生物学的粒子、例えば、ウィルスと、胞子と、バクテリア、菌類、古細菌、原生生物、他の単細胞微生物、及び具体的には1〜15μmの程度のサイズを有する微生物を含む微生物とを参照することができる。粒子は、光を吸収又は散乱し、したがって、光学粒子カウンタによって検出できる任意の小さい物体を参照することができる。本明細書で使用される「粒子」は、搬送流体の個々の原子又は分子、例えば水分子、酸素分子、ヘリウム原子、窒素分子などを除外するように意図される。本発明のいくつかの実施形態では、10nm、20nm、30nm、50nm、100nm、500nmを超える、1μm以上、又は10μm以上のサイズを有する材料の集合体を含む粒子を検出、サイズ分類、及び/又は計数することができる。特定の粒子は、20nm、30nm〜50nm、50nm〜50μmから選択されたサイズ、100nm〜10μmから選択されたサイズ、又は500nm〜5μmから選択されたサイズを有する粒子を含む。
【0053】
[0075]「エアロゾル光学粒子カウンタ」、「光学粒子カウンタ」及び「粒子カウンタ」という用語は本明細書では交換可能に使用され、流体中に浮遊する粒子を検出することができるシステム、流体中に浮遊する粒子のサイズを決定することができるシステム、流体中に浮遊する粒子を計数することができるシステム、流体中に浮遊する粒子を分類することができるシステム、又はこれらの任意の組合せを参照する。典型的な液体又はエアロゾル光学粒子カウンタは、電磁放射のビームを生成するための供給源、流体試料が流れる、例えば、液体又はガスがフローセルを通って流れる領域にビームを導くための光学系などいくつかの構成要素で構成される。典型的な光学粒子カウンタは、さらに、2次元光学検出器などの光検出器と、ビームを通過する粒子によって散乱されるか又は放射される電磁放射を検出するための収集光学系と、電流−電圧変換器並びに信号フィルタ処理及び増幅エレクトロニクスを含む、光検出器によって生成された電気信号の処理及び分析のための他のエレクトロニクスとから構成される。光学粒子カウンタは、さらに、電磁ビームが存在する検出領域に流体試料を導入する流れを生成するためのポンプから構成され得る。
【0054】
[0076]本発明は、流体中の粒子を検出及び特性評価するための2次元画像化ベースの方法及びシステムを提供する。本発明の方法及びシステムは、粒子を正確に検出及び特性評価するのに、並びに誤りカウントを抑制するのに有用な幾何学的形状及び強度分布を有する粒子検出シグニチャを生成、識別及び/又は分析する。
【0055】
[0077]図1Aは、液体試料中の粒子を検出及び/又は特性評価するのに有用な本発明の2次元画像化ベース粒子カウンタ100の概略図を示す。図1Aに示されるように、レーザ又は発光ダイオード光源などの光源105は電磁放射のビーム110を生成し、それは1つ又は複数の集束レンズなどのビーム整形光学系115に導かれる。整形された電磁放射のビーム110は、中に供給される粒子を有する流体流れを閉じ込めるための流れチャンバ122を有するフローセル120に導かれる。電磁放射のビーム110と、フローセル120の流れチャンバ122に供給された流体中の粒子との相互作用により、散乱された電磁放射が生成される。散乱された電磁放射125の一部は、収集光学系130及び135、例えば非球面レンズ系によって収集され、2次元検出器140のアレイの複数の検出器要素上に画像化される。一実施形態では、2次元検出器140は、CCD検出器若しくはカメラ、CMOS検出器、MOS検出器、能動画素センサ、マイクロチャネルプレート検出器、又はフォトダイオードの2次元アレイである。好ましい実施形態では、2次元検出器140は画像カメラシステムである。2次元アレイの検出器要素のうちの少なくとも一部の検出器要素は、散乱又は放射された電磁放射の強度に対応する出力信号を生成する。2次元検出器140の検出器要素からの少なくとも一部の出力信号は、適宜、処理エレクトロニクス145よって測定及び分析される。2次元検出器140及び/又は処理エレクトロニクス145は、各々が特定の検出器要素の閾値の値以上の出力信号を有する検出器要素の複数の出力信号のパターンを含む粒子検出シグニチャを識別及び分析するように構成される。
【0056】
[0078]図示を容易にするために、図1Aは、流れチャンバ122の断面プロファイルの一部だけが電磁放射のビーム110によって照明される光学幾何学的配置を有する本発明の実施形態を例示する。当業者には理解されるように、本発明は、流体を電磁放射のビームにさらすように広範囲の光学幾何学的配置及びビーム寸法を一体化することができる。例えば、本発明は、流れチャンバ122の断面全体のプロファイルが電磁放射のビーム110によって照明され、それによって、容量分析を行う光学幾何学的配置及びビーム寸法を含む。図1Bは、液体試料中の粒子の容量分析を行う本発明の2次元画像化ベース粒子カウンタ200の概略図を示す。図1Bに示されるように、ビーム110は流れチャンバ122に完全に重なり、容量測定を可能にする。
【0057】
[0079]図2A及び2Bは、2次元画像化ベース粒子カウンタ100の画像化ベース検出構成要素の平面図を示す。線描の要素110は、伝搬軸に沿って(紙面の中に及び外に)伝搬する整形された電磁放射のビーム110の断面図を示し、それはフローセル120と交差し、流れチャンバ122に閉じ込められた粒子を含む流体を電磁放射にさらす。図2Aは、整形された電磁放射のビーム110の断面プロファイルの長軸が流体の流れの方向と平行に(矢印に概略的によって示される)向いている光学幾何学的配置の概略図を示し、図2Bは整形された電磁放射ビーム110の断面プロファイルの長軸が流体の流れの方向に垂直に(矢印によって概略的に示される)向いている光学幾何学的配置の概略図を示す。図2A及び2Bは、さらに、フローセル120の流れチャンバ122を通って流れる粒子(図2A及び2Bでは黒丸で概略的に示される)からの散乱された電磁放射を示す光線図を示す。これらの図に示されるように、散乱光は収集光学系130及び135によって収集され、2次元検出器140の2次元アレイ150の複数の個々の検出器要素上に画像化される。図2A及び2Bの光線図によって示されるように、1つ又は複数の粒子によって散乱された電磁放射に関連する空間情報が本2次元画像化技法によって保持される。2次元アレイ150の検出器要素からの信号は、2次元検出器140及び/又は処理エレクトロニクス145によって実時間で処理及び分析され、粒子検出シグニチャが識別及び/又は分析される。
【0058】
[0080]図3は、図1A及び1Bの2次元画像化ベース粒子分析器を使用して流体中の粒子のサイズを検出し、適宜特性評価するための本発明の特定の方法のプロセス流れ図を示す。この図に示されるように、画像化ベース粒子分析器が設けられ、粒子を含む流体(ガス又は液体)が分析器を通って流れる。流体中の粒子によって散乱された電磁放射は、2次元検出器の2次元アレイの検出器要素上に画像化される。アレイの検出器要素からの出力信号は周期的に測定及び分析され、分析器において粒子からの散乱を示す粒子検出シグニチャが識別される。図3に示された特定の実施形態では、アレイの検出器要素に対応する出力信号が分析されて、粒子検出シグニチャを示す、アレイ中の検出器要素ごとに事前選択された閾値の値よりも大きい出力信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素の発生が識別される。この実施形態の粒子検出シグニチャの識別により、粒子が検出されているという決定がもたらされる。一実施形態では、検出器要素に対応する出力信号を分析して、アレイの特定の検出器要素の雑音の標準偏差よりも2.5倍大きい、適宜、アレイの特定の検出器要素の雑音の標準偏差より2.5〜5倍大きい出力信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素の発生が識別され、それによって粒子検出シグニチャが示され、粒子が検出されたという決定がもたらされる。上述のように、本発明の方法及びシステムは、注目する粒子からの散乱又は放射される電磁放射がない状態の検出条件での検出器要素の出力信号(例えば検出器要素のバックグラウンド値)の標準偏差の倍数(例えば2.5倍又は2.5〜5倍)を含む閾値の値を適宜使用することができる。
【0059】
[0081]適宜に、図3に示された方法は、検出器アレイの事前定義された領域、例えば、閾値を超えた信号を有する3つ以上縦方向に隣り合い直接近接する検出器要素又はこれらの検出器要素の一部を包含する領域からの信号を分析するステップをさらに含む。アレイの事前定義された領域は、実施形態によっては、拡張された領域である(すなわち、閾値を超えた信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素以外の追加の検出器要素を含む)。代替として、実施形態によっては、アレイの事前定義された領域は、実施形態によっては、縮小された領域である(すなわち、閾値を超えた信号を有する3つ以上の縦方向に隣り合い直接近接する検出器要素のすべてよりも少ない検出器要素を含む)。この実施形態のアレイの事前定義された領域内の検出器要素の出力信号の分析は、限定はしないが、検出器アレイの検出器要素の選択された出力信号を積分するステップと、検出器アレイの検出器要素の選択された出力信号を合計するステップと、検出器アレイの検出器要素の選択された出力信号を平均するステップとを含む一連の信号処理技法によって実行することができる。実施形態によっては、分析のステップは、出力信号から引き出された出力信号又は値を、2次元画像化ベース粒子分析器の較正の際に確立された1つ又は複数の所定の値と比較することによって実行される。アレイの事前定義された領域の検出器要素の出力信号の分析は粒子のサイズの決定をもたらす。
【0060】
[0082]図4Aは、本発明の2次元画像化ベース分析器において粒子によって散乱された電磁放射の2次元画像を示すブロック図を示す。これらの試験で画像化された粒子は125ナノメートルの直径を有するポリスチレンラテックス球体である。図4Aに示されたグリッド要素は、CCD検出器の個々の画素要素に対応する検出器要素である。6つの粒子検出シグニチャ505、510、515、520、525、及び530が画像中に明確に見える。粒子検出シグニチャの異なる位置は、電磁放射のビームを通過する流れチャンバ内の粒子の異なる位置に対応する。本発明のこの実施形態では、粒子検出シグニチャ505、510、515、520、525、及び530は、特定の検出器要素の雑音の標準偏差の3倍よりも大きい出力信号を有する少なくとも3つの隣り合い直接近接する検出器要素の複数の出力信号のパターンを含む。粒子検出シグニチャ530は、例えば、15個の出力信号のパターンを含む。
【0061】
[0083]図4Aに、縦軸570及び横軸575も示されている。粒子検出シグニチャ505、510、515、520、525、及び530の各々は、縦軸570と平行な方向に延びる一連の直接近接する検出器要素を含む縦方向成分によってさらに特徴づけることができる。一実施形態では、例えば、粒子検出シグニチャ505、510、515、520、525、及び530の各々は、縦軸570と平行な方向に延びる最も多い連続の直接近接する検出器要素を含む縦方向成分によってさらに特徴づけることができる。図4Aに示されるように、粒子検出シグニチャ505、510、515、520、525、及び530は引き伸ばされており、形状は実質的に長方形である。具体的には、粒子検出シグニチャ505、510、515、520、525及び530は、縦軸570と平行な方向に延びるより長い縦方向成分及び横軸575と平行な方向に延びるより短い横方向成分によって特徴づけられる。長方形形状のより長い寸法は(すなわち、縦軸570の方向に延びる寸法)は、電磁放射のビームを通る1つ又は複数の粒子の流れの方向に対応する。
【0062】
[0084]図4Bは、図4Aに示された粒子検出シグニチャ530の拡大図を示す。出力信号のパターンの強度値は、X1〜X5、Y1〜Y5、及びZ1〜Z5として示される。X1〜X5、Y1〜Y5、及びZ1〜Z5の各々は、例えば、特定の検出器要素の雑音の標準偏差の少なくとも3倍である値を有する、特定の検出器要素の閾値の値を超える値を有する。出力信号は、X1〜X5、Y1〜Y5、又はZ1〜Z5の特定の組について縦方向に位置合せされている。実施形態によっては、出力信号X1〜X5、Y1〜Y5、及びZ1〜Z5の強度値の分布は、電磁放射のビームと相互作用する1つ又は複数の粒子のサイズ及び/又は形状に関する情報を与える。図4Aにも、縦軸570及び横軸575が示されている。図4Bに示されるように、粒子検出シグニチャ530は、5つの直接近接する検出器要素を含む縦方向成分を有する。粒子検出シグニチャ530の縦方向成分は、一連の検出器要素X1〜X5、Y1〜Y5、及びZ1〜Z5のうちの任意のものを含むことができる。図4Bに示されるように、粒子検出シグニチャ530は、3つの直接近接する検出器要素を含む横方向成分を有する。粒子検出シグニチャ530の横方向成分は、一連の検出器要素X1Y1Z1、X2Y2Z2、X3Y3Z3、X4Y4Z4、及びX5Y5Z5のうちの任意のものを含むことができる。
【0063】
[0085]図5A及び5Bは、本発明の閾値の値の確立に関連する2次元検出器アレイの検出器要素の雑音分布を示す例示的試験データを示す。これらの図では、頻度がy軸にプロットされ、12ビットカウントがx軸にプロットされる。このデータは、5000回さらされた(すなわち5000個のフレーム)検出器アレイの単一の画素からのものである。図5Aはバックグラウンドを示し、それは定常光レベルと雑音の両方を加えたものである。図5Bは定常レベルを差し引き、雑音だけが残っている同じデータを示す。雑音分布の標準偏差は11.4に等しい。この値は、本発明では、閾値の値を確立するのに有用である。一実施形態では、例えば、特定の検出器要素の閾値の値は、特定の検出器要素の雑音分布の標準偏差の約3倍、又はこの実施例では約34.2の値で設定される。
【0064】
[0086]図6は、一連の画像解析条件に関して誤りカウント率対閾値の値(雑音分布の標準偏差の倍数で表わされた)のプロットを示す。(1vert)に対応するプロットは、単一の検出器要素が事前選択された閾値の値に等しいか又はそれを超える場合に粒子検出が決定される従来の粒子検出分析条件に対応する。(2vert)に対応するプロットは、2つの縦方向に直接近接する検出器要素が事前選択された閾値の値に等しいか又はそれを超える場合に粒子検出が決定される分析条件に対応する。したがって、この方法は、特定の閾値の値に等しいか又はそれを超える2つの直接隣り合う近接する検出器要素からの出力信号のパターンを含む粒子検出シグニチャを利用する。(3vert)に対応するプロットは、3つの縦方向に直接近接する検出器要素が事前選択された閾値の値に等しいか又はそれを超える場合に粒子検出が決定される分析条件に対応する。したがって、この方法は、特定の閾値の値に等しいか又はそれを超える3つの直接隣り合う近接する検出器要素からの出力信号のパターンを含む粒子検出シグニチャを利用する。このプロットに示されるように、閾値の値(すなわち、2vertプロット及び3 vertのプロット)を超える複数の縦方向に直接隣り合う検出器要素を有する2次元検出器シグニチャを識別することに基づいた画像解析では、誤りカウントは著しく少なくなる。図6は、さらに、複数の直接隣り合う検出器要素からの出力信号を含む粒子検出シグニチャを使用することにより、閾値の値を著しく低く設定することができるようになり、それによって、より小さい粒子(例えば0.1ミクロン未満の直径)の検出及びサイズ特性評価が可能になることを実証している。
【0065】
[0087]本発明は、以下の非限定の実施例によってさらに理解することができる。
【0066】
実施例1:2次元画像化ベース光学粒子カウンタ
[0088]本発明の画像化ベース光学粒子カウンタの性能が実験的に評価された。この実施例の光学粒子カウンタは、流体流れの粒子から散乱された光の高解像度2次元画像化(例えば液相粒子計数)を可能にするために非垂直光学幾何学的配置を使用する。本明細書で提供される結果は、本画像化ベース光学粒子カウンタが従来の光学粒子カウンタと比較して感度を増強することができる強固な感知プラットフォームを提供することを実証している。
【0067】
[0089]超高純度の脱イオン(DI)水における粒子計数の1つの課題は、多くの状況下で、例えば半導体製作設備又は製薬製造設備で使用されるような試料は非常に清浄であり、一般に少数の非常に小さい粒子を含むことである。脱イオン水は、一般に、イオン不純物を除去するために1つ又は複数のイオン交換樹脂を通過することによって準備され、付加的な微粒子及び他の不純物を除去するためにイオン交換の前又はその後に1回又は複数回フィルタ処理されることがある。超高純度脱イオン水の一般的な粒子濃度は非常に小さく、例えば、0.1ppt(一兆分率)(50nmを超える粒子について容量で1リットル当たり200カウントの粒子)未満である。さらに、いくつかの商業関連の状況では、不揮発性残渣(NVR)、金属イオン及び他のイオンは粒子の濃度を4桁より大きく超える。
【0068】
[0090]従来の光学粒子カウンタでは、搬送流体(例えば水)からの分子散乱が、カウンタが少数の小さい粒子(例えば100ナノメートル未満)を検出及びサイズ特性評価する性能を制限する重要な要因となることがある。高純度条件では、例えば、粒子カウンタの光学検出器によって検出される搬送流体から散乱された放射のレベルは、多くの場合、流体中の粒子からの散乱光の強度よりも大きい。バックグラウンド信号がDC信号であると想定され、阻止される場合、雑音はバックグラウンドの変化に起因し、それによって感度が低下し、誤りカウントの発生が潜在的にもたらされ、それにより粒子カウンタの信頼性が深刻に害されることがある。検出器の雑音の量は、一般に、DC雑音レベルの平方根に比例し、例えば、散乱レベルが4倍だけ増大する場合、雑音レベルは2倍だけ増大することになる。
【0069】
[0091]この制限に対処するために、ある光学粒子カウンタは、試料容積をより小さい区域に分割することによって、検出された分子散乱の総量を低減する。例えば、アレイ検出器を使用することにより、小さい試料容積区域を個々の検出器アレイ要素上にマッピングすることによってより高感度の粒子カウンタが可能になる。しかし、この技法は、一般に、5〜20個の検出器要素を有する1次元アレイ検出器の使用に限定される。本発明は、何千又はさらに何百万もの検出器要素を有する検出器を使用して2次元アレイ検出を実施する。本発明はデジタル信号取得及び処理方法も実施する。
【0070】
[0092]従来のシステムの制限に対処するために、本発明の光学粒子カウンタは試料容積を何千又は何百万の部分に分割し、信号をデジタル化し、高度化された信号処理ソフトウェア及び電子システムを利用して、粒子検出事象を分析する。試料容積を2次元アレイ(例えば100万画素以上のアレイ)上にマッピングすることによって、例えば、まさに高パワーレーザからのバックグラウンド放射レベルは、非常に小さい粒子、例えば、断面寸法が約100nm以下、約70nm以下、約50nm以下、及び/又は約40nm以下の粒子の高感度検出にとって十分に低いままである。本発明のこの態様により、感度の増強をもたらす極めて高パワーの光源を有効に一体化できる。さらに、本粒子カウンタに高性能検出器を組み込むと、信号対雑音比が向上することによって検出感度がさらに向上される。
【0071】
[0093]2次元アレイ検出器を含む粒子センサを使用する1つの利点は、とりわけ、粒子から散乱された放射信号が画素強度の特有のパターンを与え、それにより、粒子散乱事象から生じる信号が、分子散乱又は検出器要素に打ち当たる高エネルギー光子(例えば宇宙線)を含む非粒子信号から効率的に識別されることである。さらに、試料容積が2次元検出器の端から端までマッピングされるとき、光学セルの壁(及び/又は壁上の汚染)からの散乱を効果的に分離し、粒子からの散乱が生じている試料容積の他の区域の検出感度に影響を与えないようにすることができる。
【0072】
[0094]本明細書で説明される粒子センサの別の利点は、動作中に粒子検出事象を記録する能力、例えば2次元アレイ検出器によって検出された画像の保存である。これにより、例えば、さらなる分析及び考察のために粒子検出事象のオフライン分析を可能にすることができる。さらに、本光学粒子カウンタは2次元アレイ検出器を使用してフローセルの直接的視覚化を可能にする。この構成により、実時間最適化、故障の診断・修理、フローセル上又はその中の不純物の検出、及び/又は他の問題の検出が可能になる。
【0073】
[0095]図7A及び7Bは、2次元アレイ検出器及び非垂直検出幾何学的配置を利用する本発明の画像化ベース検出の光学幾何学的配置を示す。図7Aは平面図を示し、図7Bは側面図を示す。レーザ光源610は、狭いビームプロファイル(例えば、レーザビーム長軸がレーザビーム短軸よりも大きい)を有する電磁放射のビーム615を供給し、それは、粒子を含む流体618を有するフローセル620を通して導かれる。粒子は図7A及び7Bにおいて黒円で概略的に示される。これらの図に示されるように、流体618は、事前選択された流れの方向に(点線619で概略的に示される)流れるようにフローセル620に供給される。図7A及び7Bに示された実施形態では、ビームはフローセルからビームストップ630まで通過する。フローセルを通過する粒子はレーザビーム615によって照明されるので、散乱放射が生成され、少なくともその一部がレンズ640を含む光学収集系によって収集され、傾斜した検出器方位で設けられた2次元検出器アレイ650に導かれる。2次元検出器アレイ650のこの検出器方位は、流れの方向619に対するフローセル615に供給されるビーム615の角度によって決定され、散乱された電磁放射が2次元検出器アレイ650の活性区域上で有効に画像化される。
【0074】
[0096]例えば、図8に示されるように、レーザを通過する粒子は、検出器上に散乱光のストリークを生成することになる。図9は、レーザの異なる空間領域を通過する粒子が、検出器の異なる空間部分に散乱光ストリークを生成し、レーザによって照明されたフローセルの2次元図を効果的に与えることを示す。図10は、粒子が存在しない場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像を示し、画像の末端にフローセルの壁から散乱された光が示されている。図11は、図10からのデータを3次元強度マップとして示す。
【0075】
[0097]図12は、単一の粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの散乱放射強度画像を示す。この画像では、粒子はフローセルを通して上から下に流れ、レーザはフローセルを通して左から右に通過する。図13は図12からのデータを3次元強度マップとして示し、粒子検出事象が明確に示されている。粒子が存在する画像から粒子が存在しないバックグラウンド画像を差し引くことによって、事象の信号対雑音比は劇的に向上される。図14は、そのようなバックグラウンドを差し引いた画像を3次元強度マップとして示す。
【0076】
[0098]上述のように、本発明は、バックグラウンド基準フレームが検出事象に対応する画像から差し引かれるシステム及び方法を含む。実施形態によっては、基準フレームは50〜200個の個々のフレームの平均であり、それによって、画素ごとの定常状態バックグラウンド値を表す。これらのバックグラウンド値は検出フレーム(すなわち粒子散乱事象に対応する検出フレーム)から差し引かれ、そのため、過渡信号だけが分析される。バックグラウンド基準フレームの差し引きにより、信号が定常状態バックグラウンド値よりも小さい非常に小さい粒子の検出及びサイズ分類が可能になる。実施形態によっては、基準フレームは連続的に又はある時間間隔で更新される。一実施形態では、例えば、フレーム中の少数の画素は64個のフレームにわたって平均され、新しい値が基準バックグラウンドフレームに取って代わる。一実施形態では、基準フレーム全体がフレームレートに応じて0.5〜3秒にわたって更新される。この態様により、このシステムは、例えば、光学セルの壁への汚染物質の堆積又はフローセルの光学的性質の変化に起因するバックグラウンド散乱光の程度の変化を補償することが可能になる。
【0077】
[0099]図15は、100nm及び70nmの粒子が存在する場合に2次元検出器アレイによって観察されたフローセルの生の(すなわち、バックグラウンドを差し引いていない)散乱放射強度画像を示す。図16は、粒子が存在する場合に2次元検出器アレイによって測定された、フローセルのバックグラウンドを差し引いた一連の散乱放射強度画像である。本発明の実施形態では、粒子からの信号は、検出容積を通る粒子の通路に対応して複数の2次元画像から再構築される。本システム及び方法のこの態様は、非常に正確な粒子サイズの情報をもたらすように分析することができる粒子検出事象の複合画像を生成するのに有用である。実施形態によっては、各粒子散乱事象の複合画像は実時間で記憶及び/又は表示される。実施形態によっては、光学セル中の粒子の位置は実時間で表示される。この態様のいくつかの画像化ベース光学粒子カウンタは、検出された粒子のすべてのワンショット表示を提供する。
【0078】
[00100]図17は、100nmの粒子だけが存在する(左)並びに70nm及び100nmの粒子が存在する(右)場合に検出された粒子のサイズ分布を示す。粒子のサイズが減少するにつれて、検出器に達する粒子検出事象からの散乱放射の量が減少する。図18は、サイズが50、70、80、及び100nmの粒子サイズの場合の散乱放射信号対粒子サイズを示すデータ並びに信号対粒子サイズの理論的予測を示す。図18に示されるように、40nmもの小さい粒子が本画像化ベース光学粒子カウンタを使用して検出可能である。図19は、2次元及び3次元のバックグラウンドを差し引いた散乱放射強度プロファイルを示す。
【0079】
[00101]さらに、より高解像度の検出器アレイを利用することによって、より良好な画像化性能及び感度が、例えば、粒子検出事象当たりより多くの検出器要素を照明することにより達成される。さらに、システム幾何学的配置を最適化することによって、検出器要素は粒子検出事象中により長い間照明され、画像化性能及び感度を強化することができる。さらに、2次元検出器アレイ上のフローセルの画像を拡大することによる光学収集系の最適化によってバックグラウンド散乱信号(及び雑音)を低減することができ、2次元検出器アレイ上の画像の合焦を最適化することによってより小さい粒子検出事象のスポットサイズを達成し、信号レベルをさらに改善することができる。
【0080】
[00102]2次元検出器アレイを利用する本発明の粒子検出システムは、小さい粒子サイズ、例えば30nm以上における高い計数効率とともに、高い試料流量(例えば毎分0.5mL以上)を与えることによる追加の機能強化を提供する。光学検出のためにCMOSセンサを使用するいくつかの実施形態では、センサのサブアレイがデータ取得に使用され、それにより、極めて迅速に読み出し及び処理が行われ、感度のさらなる強化が行われる。実施形態によっては、検出区域をセンサのサブアレイに制限することにより、レーザビームの縁部を通って移送される粒子からの散乱光の測定を防止しながら実質的に均一な高い強度の光を有するレーザビームの中心部分を通過する粒子の測定を可能にし、それによって測定により提供されるサイズ解像度が向上される。
【0081】
[00103]本発明の画像化ベース粒子カウンタは、例えば、基準フレーム比較、粒子スポットサイズ、又はこれらの組合せを使用する較正検証を適宜含む。
【0082】
実施例2:光学粒子計数のための高度化された画像処理法
[00104]本発明の画像化ベース光学粒子カウンタは、約40ナノメートルもの小さい断面寸法をもつ低濃度の粒子の高感度検出及びサイズ特性評価を可能にする高度化された画像処理方法を統合している。この実施例は、粒子検出への従来の画像化ベース手法と比べて機能強化を行う本発明のいくつかの画像化処理方法の説明を与える。本画像処理方法の特徴には、(i)画素選別、ここで、画素がフィルタ処理され、閾値の値(「閾値」)を超える画素及び近接する画素だけが保持及び分析され、粒子サイズ情報が与えられる、(ii)画像化システムによって取得された多数のフレームからの複合画像の生成及び実時間分析、ここで、複数のフレームからの粒子検出事象に関連した画素が組み合わされて複合画像が生成され、それが分析されて粒子サイズ情報が与えられる、(iii)実際の雑音測定値に基づいた画素閾値の値の使用、ここで、各画素(又は、適宜、画素の若干大きいグループ)の雑音が測定され、その画素の検出閾値の値が雑音測定値の所定の倍数(例えば、バックグラウンドの標準偏差又はそれの倍数)に基づくことが含まれる。
【0083】
[00105]図20、21、22、及び23は、流体流れ中の粒子のサイズを検出及び決定するための本発明の画像処理方法の態様を例示する流れ図を示す。
【0084】
[00106]図20の流れ図は、基準フレーム及び閾値フレームを生成するための本発明のプロセスを例示する。この図に示されるように、200個の基準フレームが収集され、画素ごとの標準偏差を決定することによって分析され、粒子からの散乱された電磁放射の検出及び分析に有用な閾値フレームが計算される。画素ごとの閾値の値は、粒子からの散乱光がない状態での画素ごとのバックグラウンド信号の変動に基づく統計的分析によって決定されることに留意することが重要である。一実施形態では、例えば、個々の画素ごとのバックグラウンドの雑音の標準偏差値を反映する変動フレームが生成され、可変フレーム乗数(Y)を掛け算されて閾値フレームが決定される。一実施形態では、可変フレーム乗数(Y)は2.5〜7から選択された値である。
【0085】
[00107]図21は粒子を計数するための本発明の方法を例示しており、個々の画素値が読み出され、閾値の値と比較される。上述のように、図20のコンテキストでは、この比較は画素ごとに行われる。特定の画素の値が閾値を超えている場合、分析アルゴリズムは、画素が既存の粒子検出事象と同じ4〜8×10〜14(適宜、6×12)ウィンドウ内にあるかどうか判断し、そうであれば、画素は検出バッファに加えられる。次に、バッファを検査して、3つの隣り合う画素が閾値を超える値を有しているかどうか確かめる。3つの隣り合う画素が閾値を超える値を有していない場合、バッファは消去又はリセットされる。3つ以上の隣り合う画素が閾値を超える値を有する場合、粒子検出事象が識別され、バッファは満たされ続け、必要に応じて画素が読み出される。例えば、少なくとも3つの近接する又は直接近接する画素を含む粒子検出シグニチャがこの態様では使用されて、粒子検出事象が識別され、粒子が計数される。
【0086】
[00108]図22及び23は、検出された粒子のサイズを粒子検出シグニチャの分析によって決定する本発明の方法を例示する。図22は、検出事象の複合画像の生成のプロセスを示す。一実施形態では、検出バッファは分析のためにDSP(例えばプロセッサ)に移される。バッファ中の値が既存の検出事象に対応する画素の2列以内にある場合、バッファは既存の検出事象に加えられ、複合画像が生成される。バッファ中の値が既存の検出事象の画素の2列以内にない場合、バッファは新しい検出事象として指定され、新しい複合画像が生成される。図23は、例えば複合画像として与えられたバッファからのデータを使用して、粒子のサイズを決定するプロセスを示す。まず、集団の中心が計算される。本明細書で使用される集団の中心は、注目する粒子からの散乱された電磁放射を検出する画素からの強度値の信号重み付き中心を参照する。次に、強度値の重み付き中心を中心とした画素のアレイに対応する積分強度値が、例えば、2〜5画素幅及び5〜9行長(適宜、3画素幅及び7行長)に対応して決定される。粒子サイズを決定するために、積分強度値は、基準データ、例えば既知の物理的寸法の標準粒子を使用して実験的に決定された基準データと比較される。
【0087】
[00109]さらに引き続いて行われる説明では、本発明のいくつかの態様に有用な画像化処理ステップ及びアルゴリズムの態様が説明される。
【0088】
[00110]一実施形態では、粒子カウンタは、フローセルを通過するレーザビームをCMOS2次元検出器アレイ上に画像化することによって動作する。画素を読み出し、データをデータ処理システムに伝達するカメラシステムによってCMOSチップは制御される。カメラにより、チップのサブアレイが画定され、他の区域は無視される。注目するサブアレイ、又は注目する領域(ROl)が1行ずつ読み出され、ここで、すべての画素が読み出され、データが移されてしまうまで、第1行からの各画素、次に隣の行からの各画素などが読み出される。画素値のアレイは、まさにデジタルカメラ又はデジタルビデオカメラからの画像のようなフレーム又は画像を構成する。1行が読み出されるとすぐに、画素はリセットされ、隣のフレームのための露光を直ちに始める。実施形態によっては、露光時間を読み出し時間よりも長く設定することが可能である。これはロールシャッターと呼ばれ、その結果、露光時間の長さは画素ごとに同じであるが、最上部の行が露光される実時間は最下部から露光周期だけオフセットされることになる。しかし、画像は連続的であり、露光間に本質的に不感時間はない。
【0089】
[00111]本粒子計数システムの目標は、粒子がレーザビームを通過するときそれらを検出及びサイズ分類することである。これを行うプロセスは従来のアナログシステムに類似しているが、検出及びサイズ分類は2つの別個のステップで実行される。ステップ1は粒子を検出するステップであり、光のパルスを探し、DCバックグラウンドを無視又は阻止することによって行われる。粒子は、最低閾値を超えるのに十分な大きさの光のパルスを生成する場合に検出される。しかし、従来のシステムのように1つの「第1の閾値」だけを有する代わりに、異なる閾値が画素ごとに確立されている。
【0090】
[00112]いくつかの実施形態では、DCレベルは、200〜500個のフレームを取得し、画素ごとに平均値を計算することによって測定される。画素ごとの平均値のアレイは「基準フレーム」と呼ばれ、DCレベルを表す。さらに、すべての画素の変動又は雑音は、このプロセスの一部として測定され、200〜500個のフレームからの値の標準偏差によって表される。画素ごとの標準偏差値のこのアレイは変動フレームと呼ばれる。
【0091】
[00113]「明画素」フレームもある。CCDベースカメラを利用する実施形態では、ガラス−水界面の近くの明るい領域を画像化した画素は飽和レベルの値又はそれに近い値を有することが見いだされた。これらの画素は、飽和レベルの半分未満の値を有する画素よりも多少不規則に振る舞った。したがって、ユーザ定義レベルを超える画素(例えば400〜700個)及びある数の近接する画素(例えば2つの隣り合う画素)は「明画素」として識別され、別の扱いをされ、以下で説明する。
【0092】
[00114]明画素に対応する変動フレームの値はユーザ定義の値が「事前掛け算」されて「変更済み変動フレーム」が生成され、それは、次に、別の係数が掛け算され、基準フレームに加算されて、「閾値フレーム」が生成される。例えば、事前乗数は3であり、乗数は3程度の低さである。これらの値が与えられると、明画素の標準偏差は9が掛け算されることになり、他の「通常の」画素はすべて3が掛け算された標準偏差を有する。したがって、ほとんどの画素では、この値は、閾値を超えるために平均値を標準偏差の3倍だけ超えなければならない。この乗数の値はユーザ設定可能である。
【0093】
[00115]粒子測定が始まった後、閾値フレームは、例えば64個の画素を使用し、50個のフレームにわたってそれらを平均することによって連続的に更新される。次に、これらの64個の画素の平均を使用して基準フレームを更新し、DCレベルのいかなる変化も修正される。例えば、基準フレーム全体が約2秒ごとに更新される。
【0094】
[00116]測定:粒子計数が始まると、連続的な「測定」フレームが収集され、分析される。分析は2つの別個のステップからなる。第1のステップは粒子を「検出する」ことであり、第2のステップは粒子のサイズを決定することである。各フレームは個々に分析されるが、粒子は、レーザビームを通過するのに単一フレームの露光時間よりも長くかかる。したがって、粒子からの信号はいくつかのフレームにわたって広げられていることがあり、それらのフレームを再結合して粒子からの信号全体を表すことができる。本説明では、再結合された信号は「複合画像」と呼ばれる。
【0095】
[00117]第1の測定フレームがフレーム取り込みシステムによってカメラから受け取られると、各画素値はその画素の閾値と比較される。画素が閾値を超えたとき、その画素(値及び場所)は、例えば、6列幅×12行高さである検出バッファに配置される。画素は、バッファの第1行でバッファの列3に「中心を置かれる」。画素が読み出されるにつれて、この6×12ウィンドウに配置されている適切な画素がバッファに配置される。3行が収集された後、バッファを検査して、3つの垂直に隣り合う画素があるかどうか確かめる。yesの場合、バッファは満たしたままとすることができ、noの場合、バッファは消去され、後続の検出のために使用できるようにされる。フレームの端部において、有効に「3個連続」するバッファはすべてDSPに移され、次に消去される。後続のフレームは同じ方法で分析される。
【0096】
[00118]バッファがDSPに移されると、それらは検査されて、既存の検出事象の一部であるかどうか確かめられる。yes(同じ列又はその近く)の場合、画素は事象に加えられて複合画像が生成される。noの場合、新しい事象が生成される。
【0097】
[00119]次に、DSPに記憶された検出事象は検査されて、最近のフレームにおいて変更されたかどうか確かめられる。事象が変更されていた場合、それは別のフレームのために維持される。変更されていなかった場合、事象は完全であると見なされ、信号を計算するプロセスが始まる。
【0098】
[00120]信号を計算する際の第1のステップは、画像の信号重み付き中心を計算することである。その場所が、「rb」(最上部又は最下部の縁部の近くの粒子を廃棄するためのROIのサブセット)設定に対して検査されて、許容された行内にあるかどうか確かめられる。次に、例えば、集団の中心の各側の1列及び集団の中心の上下3行を加えて、3列幅及び7行高さである21画素の長方形を生成することによって、適切な画素が識別される。それらの21画素についてバックグラウンドを差し引いた値が合計され、その値は粒子信号と考えられる。次に、その信号はサイズ閾値と比較され、適切なサイズビンが増加される。
【0099】
[参照による援用及び変形例に関する説明]
[00121]本出願の全体にわたるすべての参考文献、例えば、発行済み特許若しくは登録特許又は均等物を含む特許文献、特許出願公開、及び非特許文献若しくは他の資料は、あたかも各参照が本出願の開示と少なくとも部分的に矛盾しない範囲で参照により個々に組み込まれる(例えば、部分的に矛盾する参照は、参照の部分的に矛盾する部分を除いて参照により組み込まれる)ように、参照により全体が本明細書に組み込まれる。2008年12月2日に出願された、JohnMitchell、Jon Sandberg、及びDwight A. Sehlerによる「Non−OrthogonalParticle Detection Systems andMethods」という名称の米国非仮出願は参照により全体が組み込まれる。
【0100】
[00122]本明細書で使用された用語及び表現は制限のためではなく説明のための用語として使用されており、そのような用語及び表現の使用において図示及び説明された特徴又はそれらの一部のいかなる均等物も排除することを意図していないが、本発明の特許請求の範囲内で様々な改変が可能であることが認識されよう。したがって、本発明は好ましい実施形態、例示的な実施形態、及び任意選択の特徴によって詳細に開示されたが、本明細書で開示された概念の改変及び変形を当業者は用いることができること、並びにそのような改変及び変形は添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることが理解されるべきである。本明細書で提供された特定の実施形態は本発明の有用な実施形態の例であり、本発明は本説明で記載されたデバイス、デバイス構成要素、方法ステップの多数の変形を使用して実行することができることが当業者には明らかであろう。当業者には明らかなように、本方法に有用な方法及びデバイスは多数の任意選択の組成、並びに処理要素及び処理ステップを含むことができる。
【0101】
[00123]範囲、例えば温度範囲、時間範囲、又は組成若しくは濃度範囲が明細書に与えられている場合はいつでも、すべての中間範囲及び部分範囲並びに特定の範囲に含まれるすべての個々の値は本開示に含まれるものである。本明細書の説明に含まれている範囲又は部分範囲の任意の部分範囲又は個々の値は、本明細書の特許請求の範囲から除外できることが理解されるであろう。
【0102】
[00124]明細書で述べられたすべての特許及び刊行物は本発明が関係する当業者の技術レベルを示している。本明細書に引用された参考文献は、それらの刊行又は出願日の時点での最新技術を示すために参照によりそれらの全体が本明細書に組み込まれ、この情報は、必要であれば、先行技術である特定の実施形態を除外するために本明細書で使用することができるものである。例えば、物質組成が請求される場合、実施可能な程度の開示が本明細書で引用された参考文献に提供されている化合物を含めて、出願者の発明に先立って当技術分野において既知で利用可能な化合物は、本明細書の物質組成の特許請求の範囲に含まれるものではないことが理解されるべきである。
【0103】
[00125]本明細書で使用される「含む(comprising)」は、「含む(including)」、「含む(containing)」、又は「によって特徴づけられる(characterizedby)」と同義であり、包括的(inclusive)又は非限定的(open−ended)であり、追加要素、記載されなかった要素、又は方法ステップを排除しない。本明細書で使用される「からなる(consistingof)」は請求項の要素に指定されていないいかなる要素、ステップ、又は成分も排除する。本明細書で使用される「本質的に〜からなる(consistingessentially of)」は、請求項の基本的及び新規な特徴に実質的に影響を与えない材料又はステップを排除しない。本明細書の各例において、「含む(comprising)」、「本質的に〜からなる(consistingessentially of)」、及び「からなる(consisting of)」という用語のいずれも他の2つの用語のいずれかと入れ代わることができる。本明細書で例示として説明された本発明は、本明細書で詳細には開示されていないいかなる1つ又は複数の要素、1つ又は複数の限定がない状態でも適切に実施することができる。
【0104】
[00126]出発原料、生体物質、試薬、合成方法、精製方法、分析方法、検定方法、及び詳細に例示されたもの以外の生物学的方法は、必要以上の実験に頼ることなく本発明の実行において使用することができることが当業者には理解されよう。任意のそのような材料及び方法の当技術分野で既知の機能的均等物のすべては本発明に含まれるものである。使用された用語及び表現は制限のためではなく説明のための用語として使用されており、そのような用語及び表現の使用において図示及び説明された特徴又はそれらの一部のいかなる均等物も排除することを意図していないが、本発明の特許請求の範囲内で様々な改変が可能であることが認識されよう。したがって、本発明は好ましい実施形態によって詳細に開示されたが、本明細書で開示された概念の任意選択の特徴、改変、及び変形を当業者は用いることができること、及びそのような改変及び変形は添付の特許請求の範囲によって規定されるような本発明の範囲内にあると見なされることが理解されるべきである。
【特許請求の範囲】
【請求項1】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、前記アレイの前記検出器要素の少なくとも一部が前記散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、
前記アレイの前記検出器要素のサブセットを決定するステップであり、前記サブセットが複数の検出器要素を含み、前記サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、
前記サブセットの前記出力信号だけをプロセッサに送出するステップと、
前記プロセッサに送出された前記出力信号を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項2】
前記サブセットは、前記検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜10個の検出器要素をさらに含む、請求項1に記載の方法。
【請求項3】
前記サブセットが前記アレイの2〜10個の検出器要素を含む、請求項1に記載の方法。
【請求項4】
前記出力信号の各々が前記アレイの特定の検出器要素について差し引かれるバックグラウンド値を有し、前記バックグラウンド値の各々が前記粒子によって散乱又は放射される電磁放射がない状態の検出条件での前記アレイ中の特定の検出器要素の平均出力信号に対応する、請求項1に記載の方法。
【請求項5】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記散乱又は放射された電磁放射の少なくとも一部を検出するステップと、
複数の検出フレームを生成するステップであり、各検出フレームが特定の時間間隔で前記検出器要素の複数の前記出力信号を含む、ステップと、
前記散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する複数の検出フレームを組み合わせて、粒子検出事象の複合画像を生成するステップと、
前記複合画像を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項6】
前記粒子によって散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する検出フレームを識別するステップをさらに含む、請求項5に記載の方法。
【請求項7】
前記検出フレームが0.1kHz〜20kHzの速度で生成される、請求項5に記載の方法。
【請求項8】
各検出フレームが50μs〜10msの時間間隔に対応する、請求項5に記載の方法。
【請求項9】
1〜100個の検出フレームが組み合わされて前記複合画像が生成される、請求項5に記載の方法。
【請求項10】
前記検出フレームの各々から基準フレームを差し引くステップをさらに含み、前記基準フレームが前記アレイ中の前記検出器要素のバックグラウンド出力信号を含み、各バックグラウンド出力信号は、前記粒子によって散乱又は放射される電磁放射がない状態の検出条件での前記アレイ中の特定の検出器要素の平均出力信号である、請求項5に記載の方法。
【請求項11】
前記基準フレームが連続的に更新される、請求項10に記載の方法。
【請求項12】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記2次元検出器のサブアレイを使用して前記散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、前記サブアレイの前記検出器要素の少なくとも一部が前記散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、
前記サブアレイ又はそれの一部に対応する前記検出器要素の出力信号だけをプロセッサに送出するステップと、
前記プロセッサに送出された前記出力信号を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項13】
前記サブアレイが前記2次元検出器の前記検出器要素の0.2%〜25%を含む、請求項12に記載の方法。
【請求項14】
前記サブアレイが1000〜100000個の検出要素を含む、請求項12に記載の方法。
【請求項15】
前記2次元検出器が400000〜1300000個の検出要素を有するCMOS検出器である、請求項12に記載の方法。
【請求項16】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記2次元検出器のサブアレイを使用して前記散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、前記サブアレイの前記検出器要素の少なくとも一部が前記散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、
前記サブアレイの前記検出器要素のサブセットを決定するステップであり、前記サブセットが複数の検出器要素を含み、前記サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、
前記サブセットの前記出力信号だけをプロセッサに送出するステップと、
前記プロセッサに送出された前記出力信号を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項17】
前記決定するステップが、前記サブアレイの前記出力信号を分析するステップと、特定の検出器要素の前記閾値の値よりも大きい出力信号を有する前記サブアレイの検出器要素を識別するステップとを含む、請求項16に記載の方法。
【請求項18】
前記サブセットは、前記検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜100個の検出器要素を含む、請求項16に記載の方法。
【請求項1】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、前記アレイの前記検出器要素の少なくとも一部が前記散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、
前記アレイの前記検出器要素のサブセットを決定するステップであり、前記サブセットが複数の検出器要素を含み、前記サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、
前記サブセットの前記出力信号だけをプロセッサに送出するステップと、
前記プロセッサに送出された前記出力信号を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項2】
前記サブセットは、前記検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜10個の検出器要素をさらに含む、請求項1に記載の方法。
【請求項3】
前記サブセットが前記アレイの2〜10個の検出器要素を含む、請求項1に記載の方法。
【請求項4】
前記出力信号の各々が前記アレイの特定の検出器要素について差し引かれるバックグラウンド値を有し、前記バックグラウンド値の各々が前記粒子によって散乱又は放射される電磁放射がない状態の検出条件での前記アレイ中の特定の検出器要素の平均出力信号に対応する、請求項1に記載の方法。
【請求項5】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記散乱又は放射された電磁放射の少なくとも一部を検出するステップと、
複数の検出フレームを生成するステップであり、各検出フレームが特定の時間間隔で前記検出器要素の複数の前記出力信号を含む、ステップと、
前記散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する複数の検出フレームを組み合わせて、粒子検出事象の複合画像を生成するステップと、
前記複合画像を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項6】
前記粒子によって散乱又は放射された電磁放射の検出された強度に対応する出力信号を有する検出フレームを識別するステップをさらに含む、請求項5に記載の方法。
【請求項7】
前記検出フレームが0.1kHz〜20kHzの速度で生成される、請求項5に記載の方法。
【請求項8】
各検出フレームが50μs〜10msの時間間隔に対応する、請求項5に記載の方法。
【請求項9】
1〜100個の検出フレームが組み合わされて前記複合画像が生成される、請求項5に記載の方法。
【請求項10】
前記検出フレームの各々から基準フレームを差し引くステップをさらに含み、前記基準フレームが前記アレイ中の前記検出器要素のバックグラウンド出力信号を含み、各バックグラウンド出力信号は、前記粒子によって散乱又は放射される電磁放射がない状態の検出条件での前記アレイ中の特定の検出器要素の平均出力信号である、請求項5に記載の方法。
【請求項11】
前記基準フレームが連続的に更新される、請求項10に記載の方法。
【請求項12】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記2次元検出器のサブアレイを使用して前記散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、前記サブアレイの前記検出器要素の少なくとも一部が前記散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、
前記サブアレイ又はそれの一部に対応する前記検出器要素の出力信号だけをプロセッサに送出するステップと、
前記プロセッサに送出された前記出力信号を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項13】
前記サブアレイが前記2次元検出器の前記検出器要素の0.2%〜25%を含む、請求項12に記載の方法。
【請求項14】
前記サブアレイが1000〜100000個の検出要素を含む、請求項12に記載の方法。
【請求項15】
前記2次元検出器が400000〜1300000個の検出要素を有するCMOS検出器である、請求項12に記載の方法。
【請求項16】
流体流れ中の粒子を検出する方法であって、
前記粒子を有する前記流体流れを供給するステップと、
前記流体流れを電磁放射のビームにさらすステップであり、前記粒子と前記ビームとの間の相互作用が散乱又は放射された電磁放射を生成する、ステップと、
前記散乱又は放射された電磁放射の少なくとも一部を2次元検出器のアレイに設けられた複数の検出器要素上に導くステップと、
前記2次元検出器のサブアレイを使用して前記散乱又は放射された電磁放射の少なくとも一部を検出するステップであり、前記サブアレイの前記検出器要素の少なくとも一部が前記散乱又は放射された電磁放射の強度に対応する出力信号を生成する、ステップと、
前記サブアレイの前記検出器要素のサブセットを決定するステップであり、前記サブセットが複数の検出器要素を含み、前記サブセットの各検出器要素が特定の検出器要素の閾値の値以上の出力信号を有する、ステップと、
前記サブセットの前記出力信号だけをプロセッサに送出するステップと、
前記プロセッサに送出された前記出力信号を分析し、それによって前記粒子を検出するステップと
を含む方法。
【請求項17】
前記決定するステップが、前記サブアレイの前記出力信号を分析するステップと、特定の検出器要素の前記閾値の値よりも大きい出力信号を有する前記サブアレイの検出器要素を識別するステップとを含む、請求項16に記載の方法。
【請求項18】
前記サブセットは、前記検出器要素の各々が特定の検出器要素の閾値の値以上の出力信号を有する近接する又は直接近接する0〜100個の検出器要素を含む、請求項16に記載の方法。
【図1A】

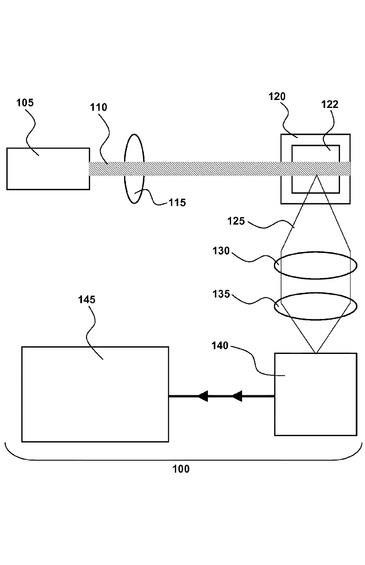
【図1B】
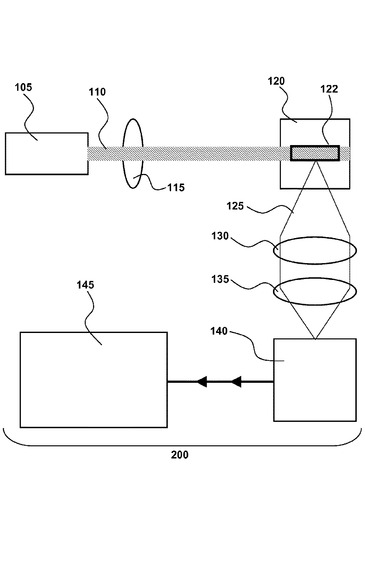
【図2A】
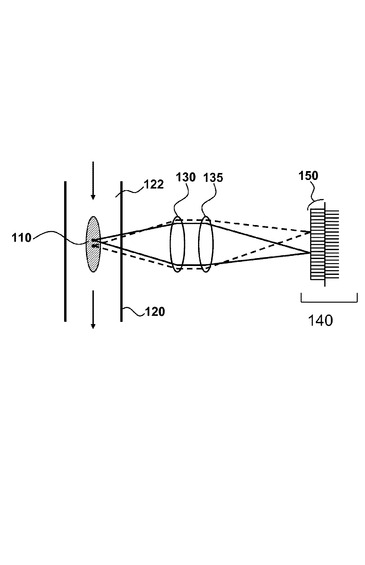
【図2B】
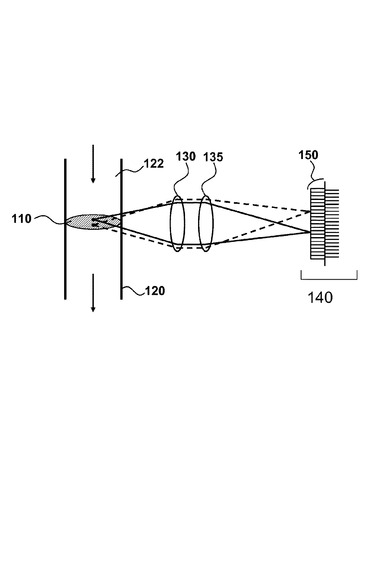
【図3】
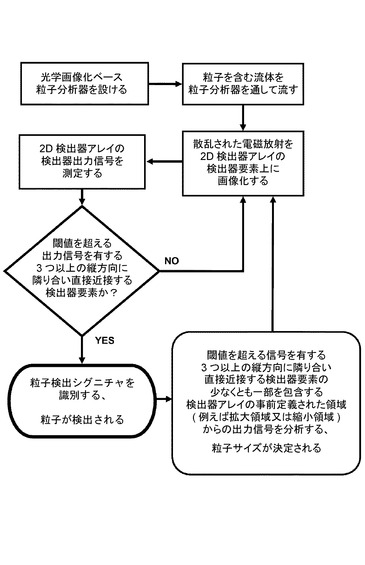
【図4A】
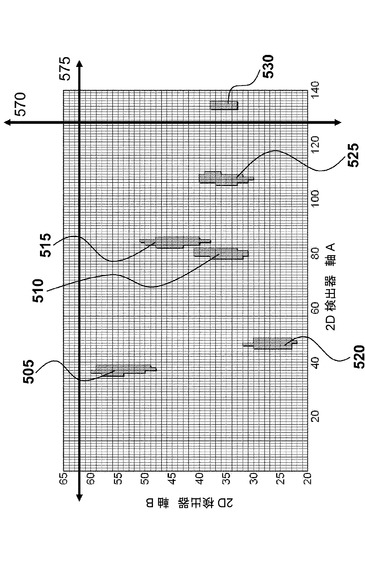
【図4B】
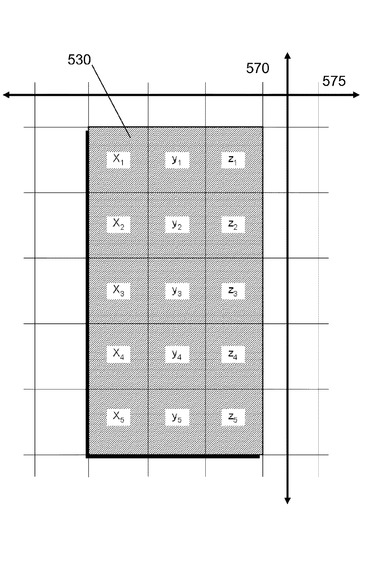
【図5A】
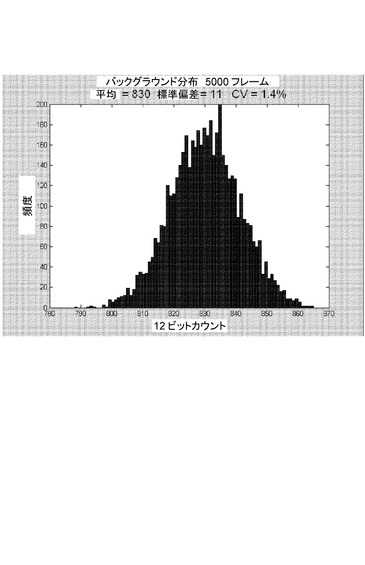
【図5B】
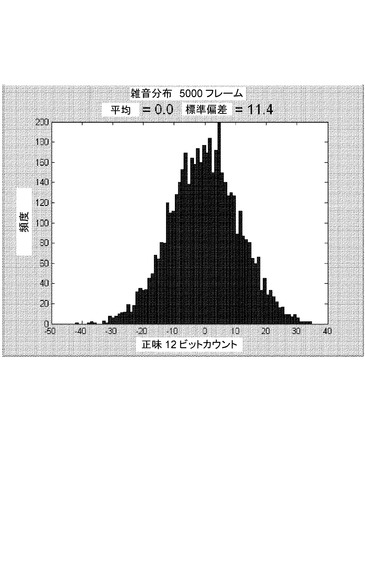
【図6】
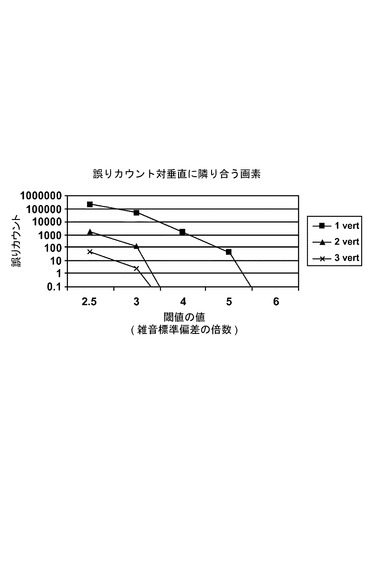
【図7A】
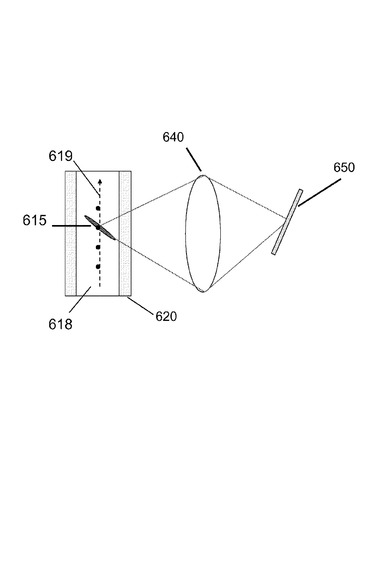
【図7B】
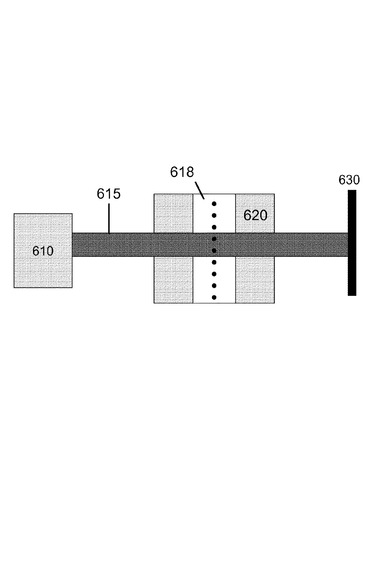
【図8】
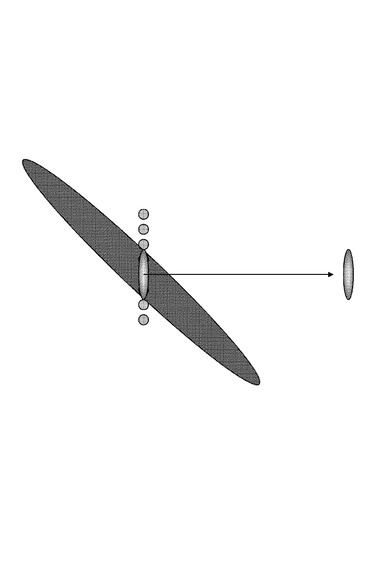
【図9】
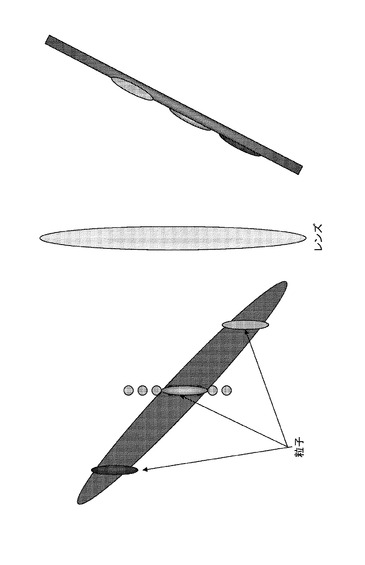
【図10】
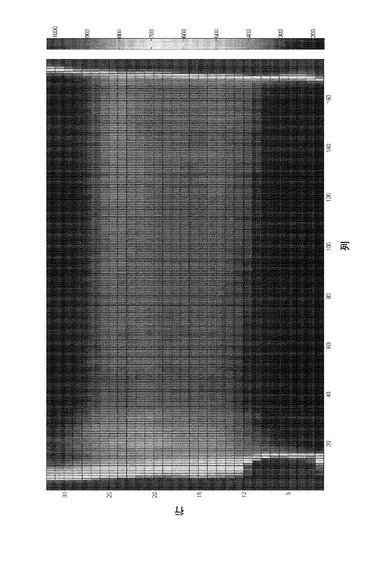
【図11】
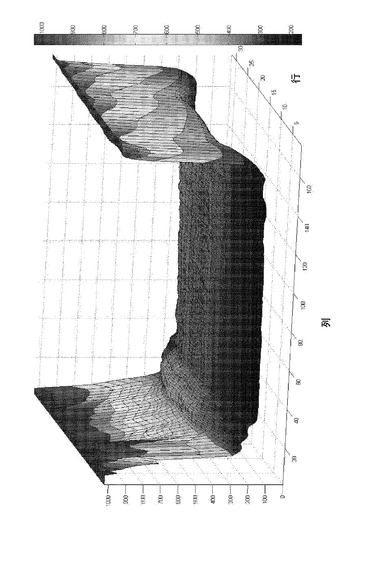
【図12】
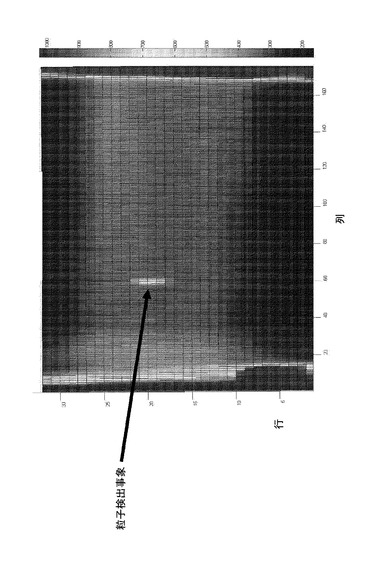
【図13】
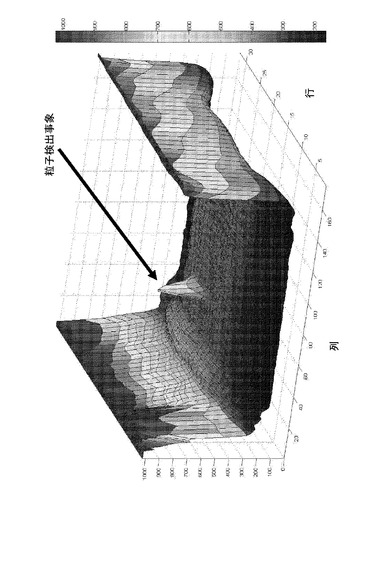
【図14】
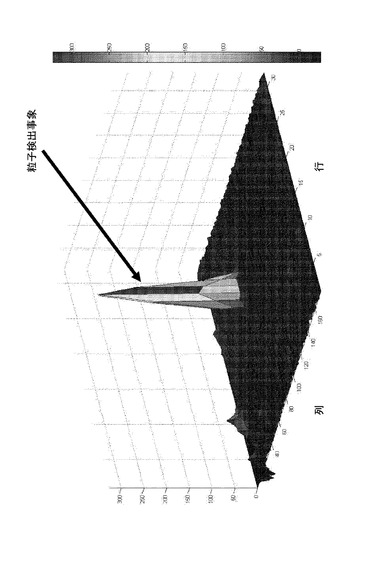
【図15】
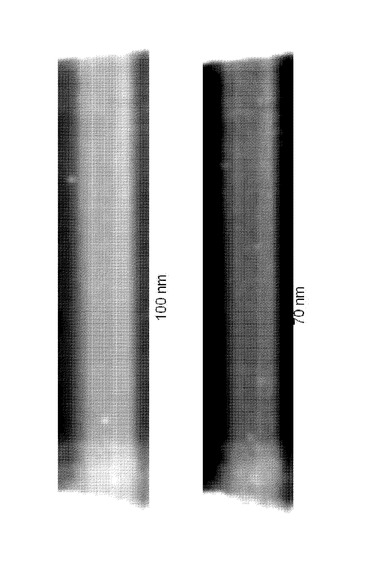
【図16】
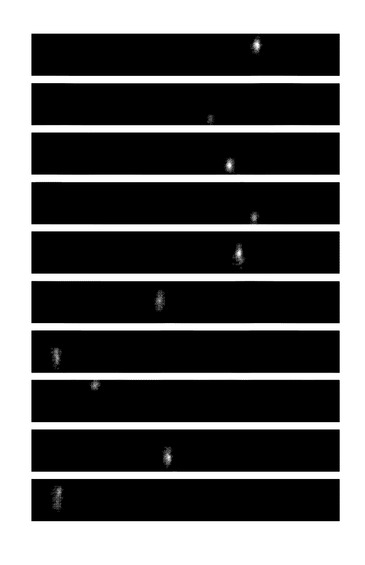
【図17】
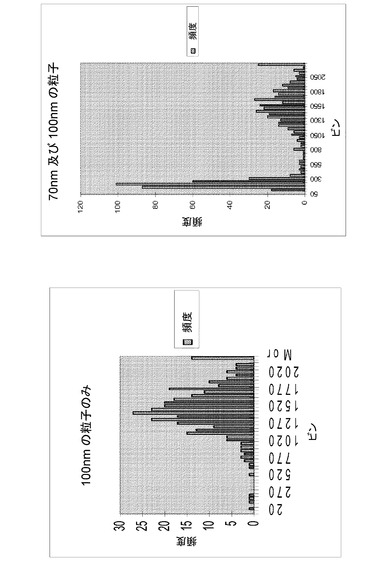
【図18】

【図19】
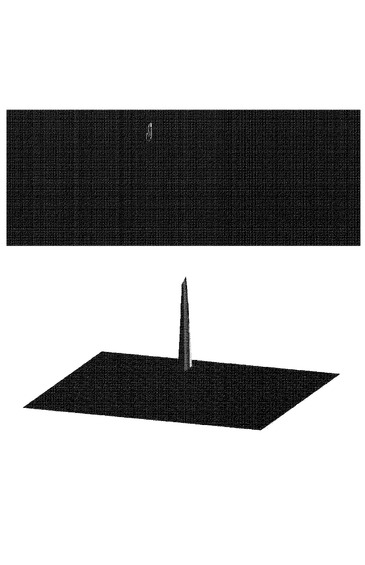
【図20】
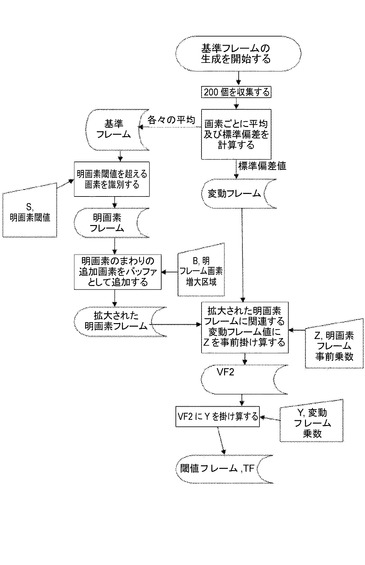
【図21】
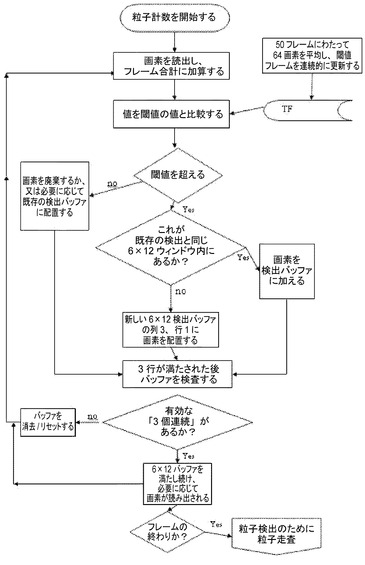
【図22】
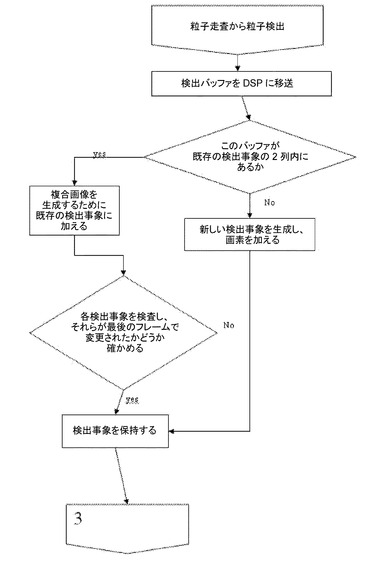
【図23】
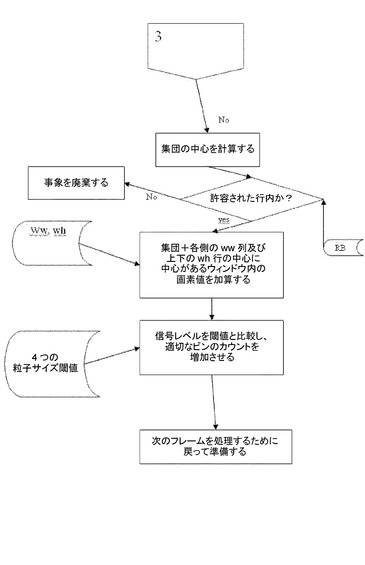
【図1B】
【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図6】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−83656(P2013−83656A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−261043(P2012−261043)
【出願日】平成24年11月29日(2012.11.29)
【分割の表示】特願2010−537012(P2010−537012)の分割
【原出願日】平成20年12月2日(2008.12.2)
【出願人】(506061299)パーティクル・メージャーリング・システムズ・インコーポレーテッド (8)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−261043(P2012−261043)
【出願日】平成24年11月29日(2012.11.29)
【分割の表示】特願2010−537012(P2010−537012)の分割
【原出願日】平成20年12月2日(2008.12.2)
【出願人】(506061299)パーティクル・メージャーリング・システムズ・インコーポレーテッド (8)
[ Back to top ]