
粒子検出装置
【課題】生物由来の粒子から発せられる蛍光の検出感度を向上できる、粒子検出装置を提供する。
【解決手段】生物由来の粒子101を検出する粒子検出装置は、主表面11を有し、主表面11上に生物由来の粒子101を捕集する基板10と、主表面11上に捕集された粒子100に励起光ELを照射する発光素子21と、発光素子21からの励起光ELを粒子100に照射したとき粒子100から発する蛍光Fを受光する受光素子34とを備える。フレネルレンズ32の光軸と、励起光ELの光線方向OD1とは交差している。主表面11は鏡面である。
【解決手段】生物由来の粒子101を検出する粒子検出装置は、主表面11を有し、主表面11上に生物由来の粒子101を捕集する基板10と、主表面11上に捕集された粒子100に励起光ELを照射する発光素子21と、発光素子21からの励起光ELを粒子100に照射したとき粒子100から発する蛍光Fを受光する受光素子34とを備える。フレネルレンズ32の光軸と、励起光ELの光線方向OD1とは交差している。主表面11は鏡面である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒子検出装置に関し、特に、生物由来の粒子を検出する粒子検出装置に関する。
【背景技術】
【0002】
従来、蛍光染色試薬を用いて染色し、励起光を照射して蛍光発光させ、検体中に存在する微細物数を計測する装置が提案されている(たとえば、特許文献1参照)。特許文献1に記載の装置では、検体に照射される励起光と検体から発光する蛍光とが同軸であり、蛍光を受光する光学系にフィルタを介して蛍光を到達させ、フィルタで励起光を除去する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−145276号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
生物由来の粒子に励起光を照射して粒子からの蛍光を検知する手法において、励起光が受光部に到達すると、ノイズとなり受光部における蛍光の検出感度が悪化する。フィルタによる励起光の分離だけでは限度があり、十分な蛍光の検出感度を得られない場合がある。また、フィルタを追加的に設ける必要があるため、装置が大型化し、装置のコストが増大する問題がある。
【0005】
本発明は上記の課題に鑑みてなされたものであり、その主たる目的は、生物由来の粒子から発せられる蛍光の検出感度を向上できる、粒子検出装置を提供することである。
【課題を解決するための手段】
【0006】
本発明に係る粒子検出装置は、生物由来の粒子を検出する粒子検出装置であって、主表面を有し、主表面上に生物由来の粒子を捕集する捕集部材と、主表面上に捕集された粒子に励起光を照射する光照射部と、光照射部からの励起光を粒子に照射したとき粒子から発する蛍光を受光する受光部とを備える。受光部の光軸と、励起光の光線方向とは交差している。主表面は鏡面である。
【0007】
上記粒子検出装置において好ましくは、蛍光は、主表面で鏡面反射する。
上記粒子検出装置において好ましくは、光照射部は、端面発光型の半導体レーザ素子を含み、半導体レーザ素子は、発光層を含む積層構造を有し、積層構造の積層方向が主表面に平行であるように配置されている。
【0008】
上記粒子検出装置において好ましくは、受光部は、集光レンズを含み、集光レンズは、励起光を吸収する材料を含む。
【0009】
上記粒子検出装置において好ましくは、集光レンズは、フレネルレンズである。
上記粒子検出装置において好ましくは、励起光の主表面への入射角をθ、集光レンズの直径をL、集光レンズと主表面との距離をT、励起光の直径をBとすると、T=(B/cosθ+L)/2tanθの関係が成立する。
【発明の効果】
【0010】
本発明の粒子検出装置によると、生物由来の粒子から発せられる蛍光の検出感度を向上することができる。
【図面の簡単な説明】
【0011】
【図1】本実施の形態における粒子検出装置の外観を示す斜視図である。
【図2】図1に示す粒子検出装置の分解状態を示す斜視図である。
【図3】粒子検出装置の構成の詳細を示す分解斜視図である。
【図4】粒子検出装置の断面図である。
【図5】粒子検出装置に含まれる光学系による光の挙動を示す模式図である。
【図6】基板の主表面における光の反射を示す模式図である。
【図7】フレネルレンズの断面を示す模式図である。
【図8】吸収剤のフィルタ特性を示すグラフである。
【図9】半導体レーザ素子から出射される光の放射特性を示す模式図である。
【図10】レーザ光の放射特性に基づいた半導体レーザ素子の配置を示す模式図である。
【図11】基板に対するフレネルレンズの配置を示す第一の模式図である。
【図12】基板に対するフレネルレンズの配置を示す第二の模式図である。
【図13】基板に対するフレネルレンズの配置を示す第三の模式図である。
【図14】粒子検出装置の動作の流れを示すフローチャートである。
【図15】アオカビ菌の蛍光スペクトルの加熱処理前後の時間変化を示す図である。
【図16】蛍光発光する埃の加熱処理前の蛍光スペクトルを示す図である。
【図17】蛍光発光する埃の加熱処理後の蛍光スペクトルを示す図である。
【図18】粒子検出装置を含む空気清浄機の外観の具体例を示す図である。
【図19】空気清浄機の機能構成の具体例を示すブロック図である。
【発明を実施するための形態】
【0012】
以下、図面に基づいてこの発明の実施の形態を説明する。なお、以下の図面において、同一または相当する部分には同一の参照番号を付し、その説明は繰返さない。
【0013】
[粒子検出装置の全体構造]
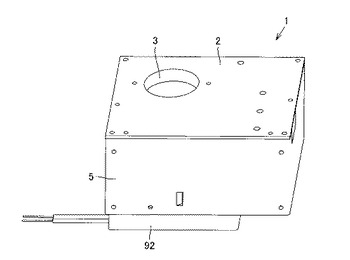
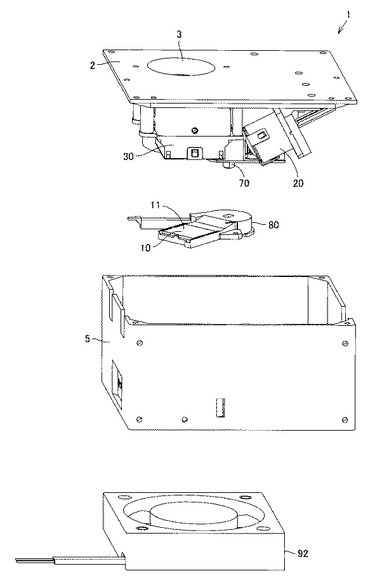
図1は、本実施の形態における粒子検出装置1の外観を示す斜視図である。図2は、図1に示す粒子検出装置1の分解状態を示す斜視図である。図3は、粒子検出装置1の構成の詳細を示す分解斜視図である。本実施の形態における粒子検出装置1は、花粉や微生物、カビといった生物由来の粒子を検出するための装置である。
【0014】
本実施の形態における粒子検出装置1は、第一筐体としての上キャビネット2と、第二筐体としての下キャビネット5とを備える。上キャビネット2は、略矩形の平板形状を有する。下キャビネット5は、底を有しかつ一方向に開口する、略直方体の容器形状を有する。上キャビネット2が下キャビネット5の開口を蓋状に閉塞するように、上キャビネット2と下キャビネット5とが組み付けられて、略直方体の外形を有する中空のキャビネットが形成される。
【0015】
捕集部60、励起光学系20、受光光学系30および清掃部96などの、粒子検出装置1を構成する各機器は、ファン92を除き、キャビネットの内部に収容される。一例として、キャビネットは、60mm×50mm(上キャビネット2の縦、横)×30mm(高さ)の大きさを有する。
【0016】
上キャビネット2には、筒状部材としての捕集筒4が一体に形成されている。捕集筒4は、中空の円筒形状を有し、その一端が上キャビネット2の下面に取付けられて、上キャビネット2から粒子検出装置1の内部に向けて延びている。上キャビネット2には、上キャビネット2の一部を厚み方向に貫通する導入部3が形成されており、導入部3を介して粒子検出装置1の外部と捕集筒4の内部とが連通している。捕集筒4は、後述する静電針62を取り囲むように設けられている。粒子を含む空気は、導入部3から捕集筒4の内側へ導入される。捕集筒4は、静電針62と対向して位置決めされた基板10に向けて、粒子を含む空気を案内する。
【0017】
ファン92は、下キャビネット5の底面外側に取付けられている。ファン92が取り付けられた下キャビネット5の底面には、開口部が形成されている。この開口部は、捕集筒4と向かい合う範囲と、後述するブラシ97と向かい合う範囲とを含むように開口し、捕集筒4と向かい合う範囲とブラシ97と向かい合う範囲とで連続的に形成されている。
【0018】
ファン92は、正転方向および反転方向に回転駆動可能である。ファン92が正転方向に駆動されることにより、粒子検出装置1の内部空間の空気がファン92を通じて粒子検出装置1の外部に排出される。ファン92が反転方向に駆動されることにより、粒子検出装置1の外部の空気がファン92を通じて粒子検出装置1の内部空間に導入される。ファン92は、粒子検出装置1内への粒子の捕集、粒子の加熱後の冷却、および、粒子を捕集するための基板10のクリーニングのために、兼用して用いられている。これにより、粒子検出装置1の小型化および低コスト化が図られている。
【0019】
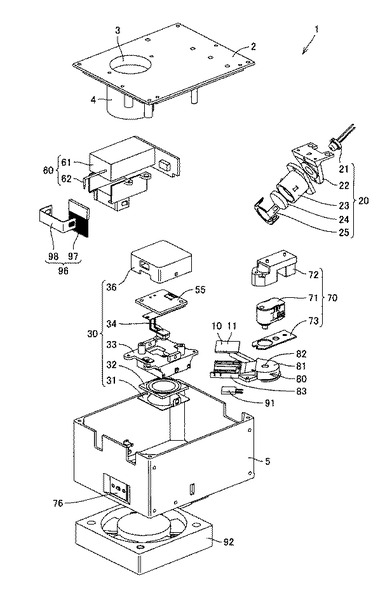
粒子検出装置1は、捕集部60を備える。捕集部60は、空気中に含まれる粒子を、捕集部材としての基板10の主表面11上に捕集する。捕集部60は、高圧電源である捕集電源回路61と、放電電極としての静電針62とを有する。基板10は、主表面11を有する。基板10は、生物由来の粒子と化学繊維の埃などの粉塵とが混合した粒子を主表面11上に捕集する、捕集部材として設けられている。
【0020】
基板10は、シリコン製の平板で形成されている。粒子を吸着する基板10の主表面11には、導電性の透明被膜が形成されている。基板10は、シリコンに限定されず、ガラス、セラミックまたは金属などから形成されてもよい。被膜は、透明被膜に限定されず、たとえば、セラミック等から形成された基板10の表面に、金属被膜が形成されてもよい。また、基板10が金属から形成される場合、その表面に被膜を形成する必要はない。基板10がシリコン基板であれば、材料自体安価であり、主表面11の鏡面加工と、主表面11への導電性被膜の形成が容易である。
【0021】
捕集電源回路61は、基板10と静電針62との間に電位差を生じさせるための電源部として設けられている。静電針62は、捕集電源回路61から延出し、捕集筒4を貫通して捕集筒4の内部に達している。基板10は、静電針62と対向して配置される。本実施の形態では、静電針62が、捕集電源回路61の正極に電気的に接続されている。基板10の主表面11に形成された被膜は、捕集電源回路61の負極に電気的に接続されている。
【0022】
なお、静電針62が捕集電源回路61の正極に電気的に接続され、基板10に形成された被膜が接地電位に接続されてもよい。または、静電針62が捕集電源回路61の負極に電気的に接続され、基板10に形成された被膜が捕集電源回路61の正極に電気的に接続されてもよい。
【0023】
ファン92が正転方向に駆動されると、粒子検出装置1のキャビネット内部の空気が排気されると同時に、キャビネットの外部の空気が捕集筒4を通って基板10に向けて導入される。この際、捕集電源回路61によって静電針62と基板10との間に電位差を発生させると、空気中の粒子は、静電針62の周囲で正極に帯電される。正極に帯電された粒子が、静電気力によって基板10に移動し、基板10の主表面11に形成された導電性の被膜に吸着されることによって、基板10に捕集される。
【0024】
このように本実施の形態における粒子検出装置1においては、静電気力を利用した帯電捕集により、粒子を基板10に捕集する。この場合、粒子の検出時に粒子を確実に基板10に保持するとともに、粒子の検出後には粒子を容易に基板10から除去することができる。放電電極として針状の静電針62を用いることによって、帯電した粒子を、静電針62に対向する基板10の表面であって、後述する発光素子の照射領域に対応した極めて狭い領域に吸着させることができる。これにより、蛍光測定工程において、吸着された微生物を効率的に検出することができる。
【0025】
粒子検出装置1は、励起光学系20と、受光光学系30とを備える。励起光学系20は、基板10の主表面11上に捕集された粒子に向けて励起光を照射する、光照射部としての機能を有する。受光光学系30は、励起光学系20からの励起光の照射に伴って粒子から発せられる蛍光を受光する、受光部としての機能を有する。励起光学系20および受光光学系30は、基板10に捕集された粒子から発する蛍光を検出する蛍光検出部を構成する。励起光学系20および受光光学系30は、基板10に捕集された粒子の加熱前および加熱後の、粒子から発する蛍光の測定を実行する。
【0026】
励起光学系20は、光源としての発光素子21と、励起部フレーム22,23と、集光レンズ24と、レンズ押さえ25とを有する。発光素子21としては、波長405nmの青色のレーザ光を発生する半導体レーザ素子が用いられる。または発光素子21は、LED(Light Emitting Diode)が用いられてもよい。発光素子21から発せられる光は、生物由来の粒子を励起して蛍光を発せさせるものであれば、紫外または可視いずれの領域の波長を有してもよい。
【0027】
受光光学系30は、金属製のノイズシールド36と、受光素子34と、受光部フレーム33と、フレネルレンズ32と、レンズ押さえ31とを有する。受光素子34としては、フォトダイオードまたはイメージセンサなどが用いられる。受光素子34とノイズシールド36との間には、受光素子34で検出された信号を増幅するための増幅回路55が設けられている。
【0028】
清掃部96は、粒子を基板10の主表面11から除去する。清掃部96は、清掃具としてのブラシ97と、ブラシ固定部98とを有する。清掃部96は、捕集電源回路61に対して固定支持されている。
【0029】
ブラシ97は、導電性を有する繊維集合体から形成されている。ブラシ97は、たとえば、カーボンファイバから形成されている。ブラシ97を形成する繊維集合体の線径は、φ0.05mm以上φ0.2mm以下であることが好ましい。ブラシ97の一端は、ブラシ固定部98に支持され、他端はブラシ固定部98から垂れ下がる自由端として形成されている。ブラシ97の自由端が基板10の主表面11に接触した状態で、基板10に対しブラシ51が相対移動することにより、粒子が基板10から除去される。
【0030】
基板10から粒子を除去する捕集具は、ブラシ97に限られるものではない。たとえば捕集具は、基板10の主表面11と接触する平板状のワイパーであってもよいし、基板10の主表面11に向けて空気を噴き出すノズルであってもよい。
【0031】
粒子検出装置1は、基板10を搭載し保持する保持部材80と、基板10を移動させる移動機構部としての駆動部70とをさらに備える。駆動部70は、回転駆動可能な回転モータ71と、回転モータ71を保持するモータホルダ72と、回転モータ71の位置決めをするモータ押さえ73とを有する。
【0032】
保持部材80は、回転ベース81を有する。回転ベース81は、熱伝導率の低い樹脂材料により形成されている。回転ベース81には、軸穴82が形成されている。軸穴82に回転モータ71の出力軸が挿通されることにより、回転モータ71と回転ベース81とが連結されている。回転モータ71の駆動に伴って、回転ベース81は、軸穴82の位置を中心に回転(正転、反転)する。
【0033】
保持部材80は、回転ベース81の回転軸から離れる方向に延びるアーム部83を有する。アーム部83は、回転ベース81の回転軸に対し直交する径方向に延伸し、その先端に枠形状部を有する。枠形状部は、基板10を収容可能な形状に形成されている。基板10は、アーム部83の先端の枠形状部に収容されることにより、保持部材80に搭載される。
【0034】
粒子検出装置1は、加熱部としてのヒータ91を備える。ヒータ91は、基板10の裏面側に配置され、基板10の主表面11上に捕集された粒子を加熱する。基板10の裏面には、ヒータ91が貼り合わされている。ヒータ91は、回転ベース81の回転時、基板10とともに移動する。ヒータ91には、ヒータ91への電力供給線や、ヒータ91に内蔵されたセンサの信号線を含む、複数の配線が接続されている。これら配線は、粒子検出装置1のキャビネットの外部に引き出されている。
【0035】
下キャビネット5の側面には、位置センサ76が配置されている。基板10は、回転モータ71の回転により、粒子検出装置1のキャビネット内を移動する。基板10の現在位置を検出するために、位置センサ76が設けられている。
【0036】
[蛍光検出部の構成]
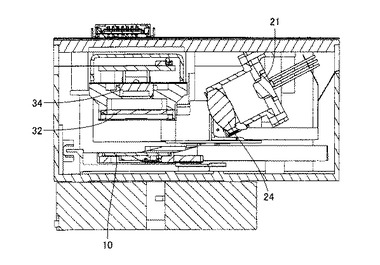
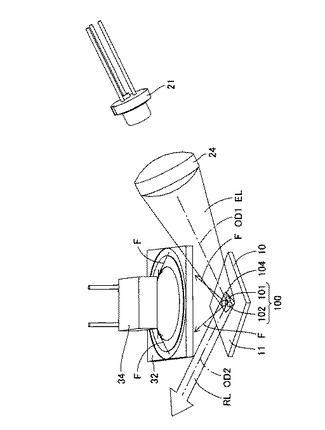
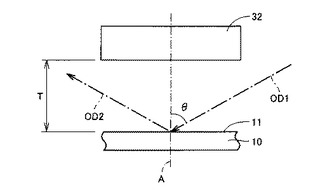
図4は、粒子検出装置1の断面図である。図5は、粒子検出装置1に含まれる光学系による光の挙動を示す模式図である。図6は、基板10の主表面11における光の反射を示す模式図である。
【0037】
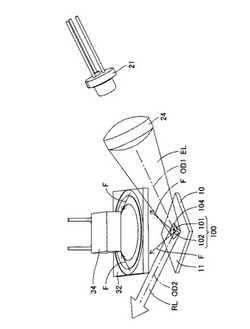
上述したように、基板10の主表面11に励起光を照射するための励起光学系20は、発光素子21と、集光レンズ24とを有する。半導体レーザ素子である発光素子21で発生した励起光ELは、集光レンズ24を経由して集光され、基板10の主表面11の励起光照射領域104に照射される。励起光ELは、基板10の主表面11に対して斜めに入射する。図5および図6において符号OD1が付された一点鎖線は、励起光ELの光線方向を示す。ここで、光線方向とは、光(この場合は励起光EL)の光束成分の進行する方向をいう。励起光ELの光線方向OD1は、励起光学系20の光軸ということもできる。
【0038】
基板10の主表面11は、鏡面である。主表面11に対して入射角θで入射する励起光ELは、主表面11において鏡面反射する。主表面11で励起光ELが正反射した光は、反射光RLを形成する。図5および図6において符号OD2が付された一点鎖線は、反射光RLの光線方向を示す。励起光ELが基板10の主表面11に対して斜めに入射するため、主表面11で鏡面反射する反射光RLも主表面11に対して斜めに反射する。
【0039】
図6において符号Aが付された一点鎖線は、受光光学系30の光軸、すなわちフレネルレンズ32の光軸を示す。励起光ELの光線方向OD1、および反射光RLの光線方向OD2は、光軸Aと交差している。光線方向OD1,OD2は、光軸Aに対して傾斜している。光線方向OD1,OD2は、基板10の主表面11の延びる方向に対して傾斜している。また図6には、基板10の主表面11とフレネルレンズ32との間の距離Tが図示されている。
【0040】
主表面11が鏡面に形成されているので、主表面11において励起光ELが散乱することによる迷光の発生が防止される。そのため、迷光がノイズとなり粒子検出装置1の検出精度が低下することを防止できる構成とされている。主表面11が鏡面である場合、主表面11での励起光ELの反射の際に散乱光が殆ど発生しないので、励起光ELが主表面11で正反射した反射光RLのみの受光光学系30への混入を防止することで、迷光による混信を防止できる。指向性が小さく一様に発生する散乱光を光路の設定により分離するのは困難であり、散乱光が発生すると高価なフィルタを使用する必要があるが、本実施の形態では、散乱光の発生を防止できるので、フィルタの設置を不要とし、装置の小型化および低コスト化が達成されている。
【0041】
励起光照射領域104には、粒子100が捕集されている。粒子100は、微生物などの生物由来の粒子101と、化学繊維の埃などの非生物由来の塵埃102とを含む。図5において符号Fが付された矢印は、粒子100が発した蛍光を示す。蛍光Fは、粒子100の表面の励起光ELが照射された部分から全方位に向かって放出される。受光光学系30へ向かう蛍光Fは、フレネルレンズ32を経由して集光され、受光素子34により受光される。蛍光Fを集光するための集光レンズをフレネルレンズ32にすることで、集光レンズを薄型化できるので、粒子検出装置1の小型化および軽量化を達成できる。
【0042】
蛍光Fは、励起光ELが照射された粒子100から、全方位に指向性なく放出される。蛍光Fの一部は、粒子100から直接フレネルレンズ32へ向かい、蛍光Fの他の一部は、粒子100から基板10の主表面11へ向かって放出される。主表面11が鏡面であれば、主表面11で蛍光Fが鏡面反射され、反射された蛍光Fはフレネルレンズ32へ向かうので、フレネルレンズ32で集光され受光素子34で受光される蛍光Fの強度を増大できる。これにより、受光素子34における蛍光Fの検出感度を向上することができる。
【0043】
フレネルレンズ32を基板10の主表面11から距離Tだけ離れた位置に配置することにより、基板10の主表面11へ向かう励起光ELおよび主表面11で正反射した反射光RLは、フレネルレンズ32へ入射しない。フレネルレンズ32に入射する光は、粒子100が発する蛍光Fのみに限定され、励起光ELと反射光RLとの両方がフレネルレンズ32により集光されない。励起光ELと反射光RLとがフレネルレンズ32に入射されず、受光素子34が励起光ELと反射光RLとを受光しない位置に、受光光学系30が配置される。このようにすれば、励起光ELおよび反射光RLと蛍光Fとを確実に分離でき、励起光ELまたは反射光RLが蛍光Fの検出に対するノイズとなることを回避できるので、蛍光Fの検出感度を向上することができる。
【0044】
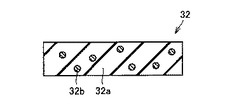
図7は、フレネルレンズ32の断面を示す模式図である。フレネルレンズ32は、母材32aと、母材32a中に細かく分散された吸収剤32bとを有する材料により形成されている。母材32aは、フレネルレンズ32として使用できる任意の材料により形成されており、たとえば蛍光Fを透過するアクリル材またはガラス材で形成されてもよい。吸収剤32bは、励起光ELの波長を含む光線を吸収する。吸収剤32bは、励起光ELの波長を含む光線がフレネルレンズ32を透過するのを妨げる。フレネルレンズ32は、励起光ELおよび反射光RLを遮断するフィルタ機能を有している。
【0045】
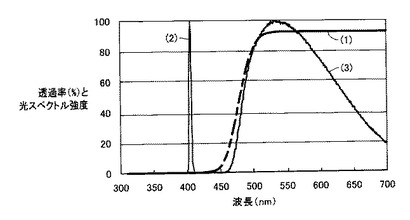
図8は、吸収剤32bのフィルタ特性を示すグラフである。図8のグラフの横軸は光の波長を示す。波長の単位はnmである。図8のグラフの縦軸はフィルタの透過率および光のスペクトル強度を示す。フィルタの透過率の単位は%である。光のスペクトル強度は、励起光ELまたは蛍光Fのスペクトル強度が最大となる波長を100としたときの、各波長でのスペクトル強度の相対値を示す。図8中の曲線(1)がフィルタ特性、曲線(2)が半導体レーザ素子による励起光ELのスペクトル強度、曲線(3)が励起光ELを照射された青カビ菌から発せられる蛍光Fのスペクトル強度を示す。
【0046】
曲線(1)に示すフィルタ特性によると、吸収剤32bは、約440nm以下の波長を有する光をほぼ遮断し、約500nm以上の波長を有する光をほぼ透過させる特性を有する。吸収剤32bは、所定の閾値以下の波長の光を遮り、閾値以上の波長の光を透過させる、ハイパスフィルタ(またはローカットフィルタ)としての特性を有する。
【0047】
曲線(2)に示すように、半導体レーザによる励起光ELは、約400nmの波長に光スペクトル強度のピーク値を有し、他の波長域ではスペクトルが測定されない。一方曲線(3)に示すように、青カビ菌からの蛍光Fは、約460nm以上の波長域においてスペクトルが測定され、約530nmの波長に光スペクトル強度のピーク値を有する。
【0048】
曲線(1)のフィルタ特性を有する吸収剤32bをフレネルレンズ32に分散させることにより、曲線(2)に示す光スペクトル強度を有する励起光ELがフレネルレンズ32に入射すると、励起光ELは吸収剤32bに吸収されて遮断される。一方、曲線(3)に示す光スペクトル強度を有する蛍光Fがフレネルレンズ32に入射すると、蛍光Fは光スペクトル強度をほぼ維持したまま、フレネルレンズ32を透過する。
【0049】
このようなフィルタ機能をフレネルレンズ32に持たせることで、フレネルレンズ32に誤って励起光ELまたは反射光RLが入射しても、フレネルレンズ32において励起光ELまたは反射光RLを遮断することができる。したがって、蛍光Fが選択的にフレネルレンズ32を透過する構成が提供されるので、蛍光Fを検出する受光素子34へのノイズの混入を抑制でき、蛍光Fの検出感度を向上することができる。フレネルレンズ32自体がフィルタ機能を有するので、フレネルレンズ32とは別にフィルタを設ける必要がなく、構成を簡略化できるので安価である。
【0050】
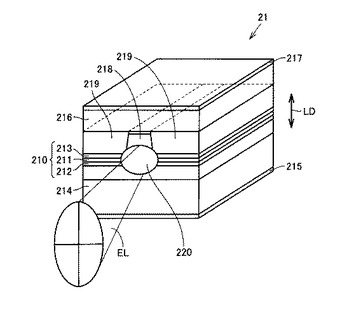
図9は、半導体レーザ素子から出射される光の放射特性を示す模式図である。本実施の形態の発光素子21である半導体レーザ素子は、発光層を含む積層構造を有する、端面発光型である。半導体レーザ素子は、n型GaAsからなる基板214、n型AlGaInPからなる下クラッド層212、多重量子井戸からなる活性層211、p型AlGaInPからなる上クラッド層213、p型GaAsからなるコンタクト層216が積層されて構成される。下クラッド層212、活性層211および上クラッド層213は、積層構造210を構成する。積層構造210を構成する各半導体層の積層方向を、図9中の符号LDが付された両矢印で示す。
【0051】
半導体レーザ素子はまた、基板214側に設けられたn型電極215と、コンタクト層216側に設けられたP型電極217と、リッジストライプ218と、n型AlInPからなる電流ブロック層219とを有する。リッジストライプ218と電流ブロック層219とは、積層構造210とコンタクト層216との間に配置されている。
【0052】
励起光ELが出射する発光部220は、活性層211を含む。発光部220は、半導体レーザ素子の光出射面において、横長に形成されている。たとえば、積層方向LDと直交する幅方向における発光部220の寸法を、活性層211の厚みで割った比の値が、50以上となるように、発光部220を形成することができる。このようなストライプ状の発光部220を有する半導体レーザ素子は、いわゆるブロードエリア(BA)型の半導体レーザを構成する。
【0053】
BA型の半導体レーザ素子では、発光部220が横長になっており、縦方向のスペースが狭いため、発光部220から出た光は回折作用によって回り込むような形で拡がる。そのため、出射された励起光ELは、半導体層の積層構造210の積層方向LDにおける広がりが、積層方向LDに直交する幅方向における広がりよりも大きくなるように広がる。上記光の回折効果によって、BA型の半導体レーザ素子から出射される励起光ELの放射特性は、半導体レーザの積層方向LDにおける励起光ELの拡がり角度が大きく、積層方向に直交する幅方向の拡がり角度が小さい、帯状になる。
【0054】
つまり、端面発光型の半導体レーザ素子から出射される励起光ELの放射特性は、半導体層の積層構造210の積層方向LDに長い、帯状になる。半導体レーザ素子から出射された励起光ELは、半導体層の積層方向LDに相対的に大きく、幅方向に相対的に小さく広がる特性を有している。そのため、半導体レーザ素子の光出射面に平行な面において、半導体層の積層方向LDにおける励起光ELの寸法を幅方向における励起光ELの寸法で割った比の値は、光線が半導体レーザ素子から離れるにつれて大きくなる。そこで、このような帯状の励起光ELが基板10の主表面11に最適な形状の励起光照射領域104を形成するように、半導体レーザ素子を配置する。
【0055】
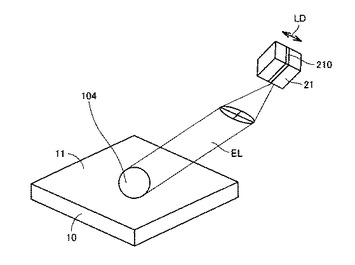
図10は、レーザ光の放射特性に基づいた半導体レーザ素子の配置を示す模式図である。図10に示すように、発光層である活性層211を含む半導体層の積層構造210を有する半導体レーザ素子である発光素子21を、半導体層の積層方向LDが主表面11の延在方向に沿い、積層方向LDが基板10の主表面11に平行であるように、配置する。
【0056】
このようにBA型の半導体レーザ素子の配置を揃えることにより、半導体レーザ素子から出射された励起光ELが帯状に広がる光の長手方向を、基板10の主表面11に平行な方向に揃えることができる。励起光ELは、基板10の主表面11に対して傾斜する方向に沿って主表面11に照射され、これにより帯状に広がる励起光ELは、基板10の主表面11において当該帯状の短手方向に広げられる。主表面11に照射される励起光ELは、長手方向の広がりと短手方向の広がりとがほぼ等しくなり、対称な形状の励起光照射領域104を形成する。
【0057】
たとえば、図9および図10において模式的に長円状に広がる励起光ELを発生する半導体レーザ素子を、半導体層の積層方向LDが基板10の主表面11に平行であるように配置する。これにより、基板10の主表面11において、長円の短手方向に励起光ELが広がるので、主表面11に形成される励起光照射領域104はほぼ真円の形状になる。そのため、励起光照射領域104の面積を小さくでき、主表面11に捕集された粒子100に照射される励起光ELを高密度化できる。したがって、粒子100から発生する蛍光Fの強度を増大させ、受光素子34での蛍光Fの検出精度を向上できるので、粒子100の量の高感度な検出が可能になる。
【0058】
主表面11上のある程度の広がりを持つ領域に励起光ELが照射され、所定の面積を有する励起光照射領域104が形成されるのが望ましい。主表面11上に広がりを有する励起光照射領域104を形成することにより、基板10の主表面11に捕集された粒子100のうちのより多くの粒子100に励起光ELを照射することができるので、粒子の検出精度を向上することができる。他方、基板10の主表面11を外れた領域に励起光ELが照射されると散乱して迷光になり、この迷光は蛍光Fの検出精度を低下させる。このような迷光の発生を防止するには、励起光ELの全てを基板10に照射する必要がある。この場合、励起光照射領域104が大きく広がっていると、基板10を大きくする必要があり、粒子検出装置1が大型化する問題がある。
【0059】
そこで、図10に示すように、基板10の主表面11上で励起光ELを円形にし、円形の励起光照射領域104を形成すれば、蛍光Fの検出精度の低下を回避し、かつ装置の大型化を抑制できるので、検出精度に優れ小型化に適した粒子検出装置1を提供することができる。
【0060】
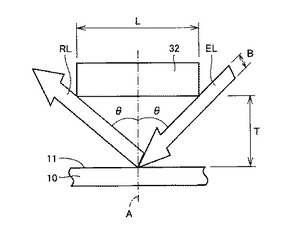
図11〜13は、基板10に対するフレネルレンズ32の配置を示す模式図である。図11に示すように、励起光ELおよび反射光RLが光線方向に対する広がりを有さず略ゼロの直径を有すると仮定した場合、励起光ELは代表的に光線方向OD1で示され、反射光RLは代表的にOD2で示される。励起光ELは入射角θで基板10の主表面11に入射する。主表面11が鏡面として形成されているために、主表面11において励起光ELは正反射し、入射角と同じ反射角θで反射光RLが反射する。
【0061】
励起光ELおよび反射光RLの直径が略ゼロである場合のフレネルレンズ32は、直径L0を有するように形成されている。入射角が角度θである励起光ELおよび反射角が角度θである反射光RLが直径L0のフレネルレンズ32に干渉しないために、フレネルレンズ32は基板10の主表面11から距離Tだけ離れた位置に配置されている。この場合、tanθ=(L0/2)/T=L0/2Tの関係が成立する。
【0062】
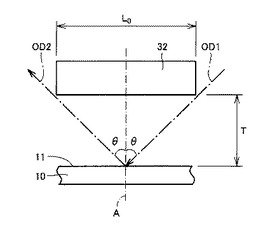
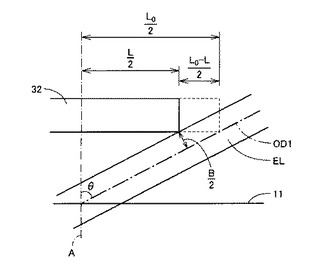
図12および図13には、励起光ELおよび反射光RLが直径Bを有するとする場合に、図11と同じく距離Tだけ主表面11から離れて配置されるフレネルレンズ32に励起光ELおよび反射光RLが干渉しないための条件を示す。励起光ELおよび反射光RLが光線方向OD1,OD2に対する広がりを有するので、フレネルレンズ32は、図11に示す直径L0よりも小さい、直径Lを有するように形成される。
【0063】
この場合、図13を参照して、(B/2)/{(L0−L)/2}=cosθの関係が成立し、整理すると、L0=B/cosθ+Lとなる。この関係式を上述した式に代入すると、tanθ=(B/cosθ+L)/2Tとなる。結局、基板10とフレネルレンズ32との距離Tは、角度θの関数として、T=(B/cosθ+L)/2tanθと表される。この距離Tは、フレネルレンズ32の直径L、励起光ELの直径Bである場合に、励起光ELの入射角が角度θであるとき、励起光ELおよび反射光RLとフレネルレンズ32との干渉を防止するために、基板10の主表面11からフレネルレンズ32を離す必要のある距離の最小値を示す。
【0064】
つまり、励起光ELおよび反射光RLとフレネルレンズ32とが干渉しないためには、上式により求められる距離T以上、フレネルレンズ32を基板10の主表面11から離して配置すればよい。一方、フレネルレンズ32を基板10に近づけて配置するほど、光学系の小型化が可能になり、したがって粒子検出装置1を小型化できる。加えて、基板10の主表面11に捕集された粒子100にフレネルレンズ32を近づけるほど、粒子100から放出される蛍光Fの受光効率が向上し、蛍光Fの検出精度が向上する。これは、蛍光Fは粒子100から全方向に指向性なく放出されるため、粒子100にフレネルレンズ32を近づけるほどより広い角度の範囲の蛍光Fを受光できることによる。したがって、距離Tと角度θとの間にT=(B/cosθ+L)/2tanθの関係が成立するように、フレネルレンズ32と基板10との相対位置を定めるのが望ましい。
【0065】
励起光ELの入射角θを大きくし、励起光ELの主表面11に対する傾斜を小さくすれば、T=(B/cosθ+L)/2tanθで求められる距離Tの値が小さくなる。つまり、励起光ELの入射角θを大きくするほど、フレネルレンズ32を基板10に近づけても反射光RLがフレネルレンズ32に入射しなくなる。よって、フレネルレンズ32を基板10により近接させて配置することができ、粒子検出装置1をより小型化することが可能になる。たとえば入射角θを60°以上の範囲に設定するのが望ましい。
【0066】
しかしながら、入射角θが大きすぎると、励起光ELの光線方向OD1が主表面11に平行な方向に近づくことになる。そのため、励起光学系20に近い位置に捕集された粒子100には励起光ELが照射されるが、励起光学系20から離れる位置に捕集された粒子100が励起光学系20に近い粒子100の陰に隠れ、励起光学系20から離れる粒子100に励起光ELが照射されなくなる。この場合、基板10に捕集された全ての粒子100が蛍光Fを放出しなくなるので、基板10への粒子100の捕集量に対応する強度の蛍光Fを検出できず、粒子量の検出精度が低下する問題がある。したがって、たとえば入射角θを、70°以下の範囲に設定するのが望ましい。
【0067】
[粒子検出装置の動作]
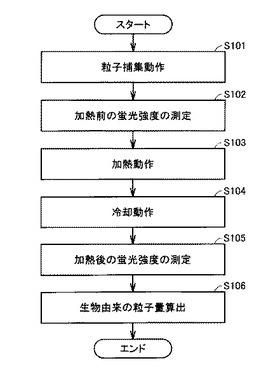
以上の構成を有する粒子検出装置1を用いて生物由来の粒子101の量を検出する動作について説明する。図14は、粒子検出装置1の動作の流れを示すフローチャートである。
【0068】
図14を参照して、まず、基板10の主表面11に、粒子100を捕集する(S101)。このとき、ファン92を正転方向に駆動させることによって、粒子検出装置1のキャビネット内に導入部3を経由させて空気を導入し、基板10の主表面11へ向かう空気の流れを形成する。加えて、静電針62を基板10の主表面11に対向配置するとともに、捕集電源回路61によって静電針62と基板10との間に電位差を発生させる。これにより、空気中に浮遊する粒子100を帯電させ、帯電された粒子100を静電気力によって基板10の主表面11に捕集する。
【0069】
次に、励起光学系20によって、基板10に捕集された粒子100へ向けて励起光ELを照射するとともに、受光光学系30によって、励起光ELの照射に伴って粒子100から発せられる蛍光Fを受光する。半導体レーザ素子である発光素子21から励起光ELを粒子100に向けて照射し、このとき粒子100から発せられる蛍光Fをフレネルレンズ32を通じて受光素子34にて受光する。これにより、基板10に捕集された粒子100の加熱前の蛍光強度を測定する(S102)。
【0070】
次に、ヒータ91に通電することによって、基板10に捕集された粒子100を加熱する(S103)。次に、ヒータ91への通電を停止して、基板10を冷却する(S104)。この際、ファン92を反転方向に駆動させることによって、ファン92を経由して空気を粒子検出装置1のキャビネット内に導入し、基板10の冷却を促進させる。
【0071】
次に、励起光学系20によって、基板10に捕集された粒子100に向けて励起光ELを照射するとともに、受光光学系30によって、励起光ELの照射に伴って粒子100から発せられる蛍光Fを受光する。これにより、基板10に捕集された粒子100の加熱後の蛍光強度を測定する(S105)。加熱前の蛍光Fの強度と加熱後の蛍光Fの強度とを比較することにより、基板10に捕集された粒子100に含まれる生物由来の粒子101の量を算出する(S106)。
【0072】
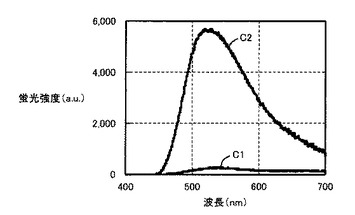
図15は、アオカビ菌の蛍光スペクトルの加熱処理前後の時間変化を示す図である。図15には、生物由来の粒子101の一例として、アオカビ菌を200℃にて5分間加熱処理したときの加熱処理前(曲線C1)および加熱処理後(曲線C2)の蛍光スペクトルの測定結果である。これらに示されるように、加熱処理を施すことによってアオカビ菌からの蛍光強度が大幅に増加していることが分かる。
【0073】
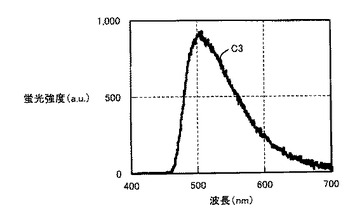
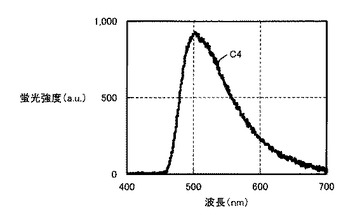
図16は、蛍光発光する埃の加熱処理前の蛍光スペクトルを示す図である。図17は、蛍光発光する埃の加熱処理後の蛍光スペクトルを示す図である。図16および図17のそれぞれは、蛍光を発する埃を200℃にて5分間加熱処理したときの加熱処理前(曲線C3)および加熱処理後(曲線C4)の蛍光スペクトルの測定結果である。曲線C3により示された蛍光スペクトルと曲線C4により示された蛍光スペクトルとを重ねると、これらはほぼ重なることが検証される。すなわち、埃からの蛍光強度は加熱処理の前後において変化がないことが分かる。
【0074】
空気中に浮遊する生物由来の粒子101に紫外光または青色光を照射すると、生物由来の粒子101は蛍光Fを発する。しかしながら、空気中には化学繊維の埃などの、同様に蛍光を発する塵埃102が浮遊しており、蛍光Fを検出するのみでは、生物由来の粒子101からのものであるのか塵埃102からのものであるのかが区別されない。
【0075】
一方、生物由来の粒子101および塵埃102に対してそれぞれ加熱処理を施し、加熱前後における蛍光強度(蛍光量)の変化を測定すると、塵埃102から発せられる蛍光強度が加熱処理によって変化しないのに対して、生物由来の粒子101から発せられる蛍光強度は、加熱処理によって増加する。本実施の形態における粒子検出装置1では、生物由来の粒子101と塵埃102とが混合する粒子100に対して、加熱前後の蛍光強度を測定し、その差分を求めることにより、生物由来の粒子101の量を特定する。
【0076】
生物由来の粒子101から発せられる蛍光Fの強度は、加熱処理によって増加する。このため、ステップ(S105)では、ステップ(S102)の加熱前の蛍光測定で測定された蛍光強度よりも大きい値の蛍光強度が測定される。加熱前の蛍光強度と加熱後の蛍光強度との差から、蛍光強度の増大量を算出する。予め用意した蛍光強度の増大量と生物由来の粒子濃度との関係に基づき、算出された増大量に対応する生物由来の粒子101の濃度を特定することができる。なお、増大量と生物由来の粒子濃度との対応関係は、予め実験的に決められる。
【0077】
[粒子除去装置の構成]
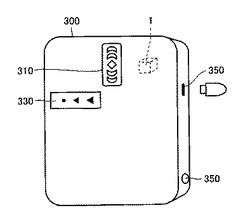
本実施の形態における粒子検出装置1は、生物由来の粒子101を検出するための装置単体として用いられてもよいし、空気清浄機やエアーコンディショナ、加湿器、除湿機、掃除機、冷蔵庫、テレビなどの家電製品に組み込まれてもよい。図18は、粒子検出装置1を含む空気清浄機300の外観の具体例を示す図である。空気清浄機300は、粒子検出装置1により検出された生物由来の粒子101を効率的に除去するための、粒子除去装置の一例である。
【0078】
空気清浄機300は、操作指示を受け付けるためのスイッチ310と、検出結果などを表示するための表示パネル330とを含む。その他、図示されない、空気を導入するための吸引口、排気するための排気口、などを含む。さらに、空気清浄機300は、記録媒体を装着するための通信部350を含む。通信部350は、インターネットを介して他の装置と通信するための通信回線を接続するためのものであってもよい。または、通信部350は、赤外線通信やインターネット通信などで他の装置と通信するためのものであってもよい。粒子検出装置1は、空気清浄機300の筐体の内部に配置される。生物由来の粒子101を精度よく検出できるとともに小型化を達成できる粒子検出装置1を備えることにより、空気清浄機300は、周辺の空気を効率よく清浄化できる。
【0079】
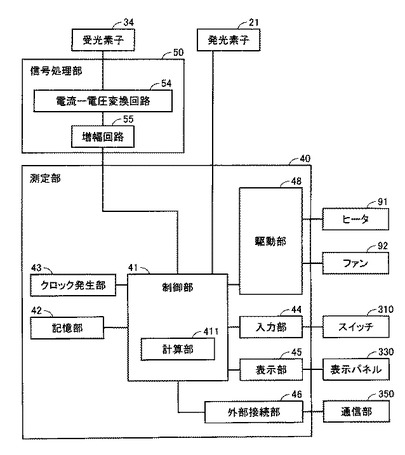
図19は、空気清浄機300の機能構成の具体例を示すブロック図である。図19では、信号処理部50の機能が主に電気回路であるハードウェア構成で実現される例が示されている。しかしながら、これら機能のうちの少なくとも一部は、信号処理部50が図示しないCPU(Central Processing Unit)を備え、該CPUが所定のプログラムを実行することによって実現される、ソフトウェア構成であってもよい。また、測定部40の構成がソフトウェア構成である例が示されている。しかしながら、これら機能のうちの少なくとも一部は、電気回路などのハードウェア構成で実現されてもよい。
【0080】
図19を参照して、信号処理部50は、受光素子34に接続される電流−電圧変換回路54と、電流−電圧変換回路54に接続される積分型の増幅回路55とを含む。
【0081】
測定部40は、制御部41、記憶部42、およびクロック発生部43を含む。さらに、測定部40は、スイッチ310の操作に伴ったスイッチ310からの入力信号を受け付けることで情報の入力を受け付けるための入力部44と、表示パネル330に測定結果等を表示させる処理を実行するための表示部45と、通信部350に接続された外部装置とのデータ等のやり取りに必要な処理を行なうための外部接続部46と、ファン92およびヒータ91を駆動させるための駆動部48とを含む。
【0082】
基板10の主表面11上に捕集された粒子100に対して発光素子21から励起光ELが照射されることで、励起光照射領域104にある当該粒子100からの蛍光Fが、受光素子34に集光される。受光素子34から、受光量に応じた電流信号が信号処理部50に対して出力される。電流信号は、電流−電圧変換回路54に入力される。
【0083】
電流−電圧変換回路54は、受光素子34から入力された電流信号より蛍光強度を表わすピーク電流値Hを検出し、電圧値Ehに変換する。電圧値Ehは増幅回路55で予め設定した増幅率に増幅され、測定部40に対して出力される。測定部40の制御部41は信号処理部50から電圧値Ehの入力を受け付けて、順次、記憶部42に記憶させる。
【0084】
クロック発生部43はクロック信号を発生させ、制御部41に対して出力する。制御部41は、クロック信号に基づいたタイミングで、ファン92を回転させるための制御信号を駆動部48に対して出力して、ファン92による空気の導入を制御する。また、制御部41は発光素子21および受光素子34と電気的に接続され、それらのON/OFFを制御する。
【0085】
制御部41は計算部411を含み、計算部411において、記憶部42に記憶された電圧値Ehを用いて、導入された空気中の生物由来の粒子量を算出するための動作が行なわれる。
【0086】
計算部411で算出された捕集された粒子100中の生物由来の粒子101の濃度は、制御部41から表示部45に対して出力される。表示部45は、入力された微生物の濃度を、表示パネル330に表示させるための処理を行なう。たとえば、表示パネル330には、濃度ごとのランプが備えられ、表示部45は、算出された濃度に対応したランプを点灯するランプとして特定し、該ランプを点灯する。他の例として、算出された濃度ごとに、ランプを異なる色に点灯させてもよい。また、表示パネル330はランプ表示に限定されず、数字を表示したり、濃度や対応して予め用意されているメッセージを表示したりしてもよい。また、測定結果は、外部接続部46によって、通信部350に装着された記録媒体に書き込まれてもよいし、通信部350を介して外部装置に送信されてもよい。
【0087】
入力部44はスイッチ310からの操作信号に従って、表示パネル330での表示方法の選択を受け付けてもよい。または、測定結果を、表示パネル330に表示するか、外部装置に出力するか、の選択を受け付けてもよい。その内容を示す信号は、制御部41に対して出力され、制御部41から表示部45および/または外部接続部46に対して必要な制御信号が出力される。
【0088】
粒子検出装置1は、生物由来の粒子101からの蛍光Fと蛍光Fを発する塵埃102からの蛍光Fとの加熱処理による性質の差を利用し、所定の加熱処理後の増大量に基づいて生物由来の粒子101を検出する。そのため、導入された空気中に蛍光Fを発する塵埃102が含まれている場合であっても、粒子検出装置1は、リアルタイムに、かつ精度よく、生物由来の粒子101を、蛍光を発する塵埃102から分離して検出する。
【0089】
空気清浄機300は、この粒子検出装置1により検出された生物由来の粒子101の濃度を利用して、粒子検出装置1の出力に応じて運転状態を変化させることにより、生物由来の粒子101を効率的に除去することができる。すなわち、粒子検出装置1の出力が大きく生物由来の粒子101の濃度が高い場合には、たとえばファン92を高速回転させ通風量を増加させることにより、空気清浄機300による粒子除去能力を向上させることができる。粒子検出装置1の出力が小さく生物由来の粒子101の濃度が低い場合には、粒子除去能力を低下できるので、ファン92の回転数を低下させて通風量を減少させ、省電力化した運転を行なうことができる。
【0090】
以上のように本発明の実施の形態について説明を行なったが、今回開示された実施の形態はすべての点で例示であって、制限的なものではないと考えられるべきである。この発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味、および範囲内でのすべての変更が含まれることが意図される。
【産業上の利用可能性】
【0091】
この発明は、主に、花粉や微生物、カビといった生物由来の粒子を検出する装置として利用される。
【符号の説明】
【0092】
1 粒子検出装置、10 基板、11 主表面、20 励起光学系、21 発光素子、24 集光レンズ、30 受光光学系、32 フレネルレンズ、32a 母材、32b 吸収剤、34 受光素子、100 粒子、101 生物由来の粒子、102 塵埃、104 励起光照射領域、210 積層構造、211 活性層、220 発光部、300 空気清浄機、A 光軸、B 光の直径、EL 励起光、F 蛍光、L,L0 レンズの直径、LD 積層方向、OD1,OD2 光線方向、RL 反射光、T 距離、θ 入射角。
【技術分野】
【0001】
本発明は、粒子検出装置に関し、特に、生物由来の粒子を検出する粒子検出装置に関する。
【背景技術】
【0002】
従来、蛍光染色試薬を用いて染色し、励起光を照射して蛍光発光させ、検体中に存在する微細物数を計測する装置が提案されている(たとえば、特許文献1参照)。特許文献1に記載の装置では、検体に照射される励起光と検体から発光する蛍光とが同軸であり、蛍光を受光する光学系にフィルタを介して蛍光を到達させ、フィルタで励起光を除去する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−145276号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
生物由来の粒子に励起光を照射して粒子からの蛍光を検知する手法において、励起光が受光部に到達すると、ノイズとなり受光部における蛍光の検出感度が悪化する。フィルタによる励起光の分離だけでは限度があり、十分な蛍光の検出感度を得られない場合がある。また、フィルタを追加的に設ける必要があるため、装置が大型化し、装置のコストが増大する問題がある。
【0005】
本発明は上記の課題に鑑みてなされたものであり、その主たる目的は、生物由来の粒子から発せられる蛍光の検出感度を向上できる、粒子検出装置を提供することである。
【課題を解決するための手段】
【0006】
本発明に係る粒子検出装置は、生物由来の粒子を検出する粒子検出装置であって、主表面を有し、主表面上に生物由来の粒子を捕集する捕集部材と、主表面上に捕集された粒子に励起光を照射する光照射部と、光照射部からの励起光を粒子に照射したとき粒子から発する蛍光を受光する受光部とを備える。受光部の光軸と、励起光の光線方向とは交差している。主表面は鏡面である。
【0007】
上記粒子検出装置において好ましくは、蛍光は、主表面で鏡面反射する。
上記粒子検出装置において好ましくは、光照射部は、端面発光型の半導体レーザ素子を含み、半導体レーザ素子は、発光層を含む積層構造を有し、積層構造の積層方向が主表面に平行であるように配置されている。
【0008】
上記粒子検出装置において好ましくは、受光部は、集光レンズを含み、集光レンズは、励起光を吸収する材料を含む。
【0009】
上記粒子検出装置において好ましくは、集光レンズは、フレネルレンズである。
上記粒子検出装置において好ましくは、励起光の主表面への入射角をθ、集光レンズの直径をL、集光レンズと主表面との距離をT、励起光の直径をBとすると、T=(B/cosθ+L)/2tanθの関係が成立する。
【発明の効果】
【0010】
本発明の粒子検出装置によると、生物由来の粒子から発せられる蛍光の検出感度を向上することができる。
【図面の簡単な説明】
【0011】
【図1】本実施の形態における粒子検出装置の外観を示す斜視図である。
【図2】図1に示す粒子検出装置の分解状態を示す斜視図である。
【図3】粒子検出装置の構成の詳細を示す分解斜視図である。
【図4】粒子検出装置の断面図である。
【図5】粒子検出装置に含まれる光学系による光の挙動を示す模式図である。
【図6】基板の主表面における光の反射を示す模式図である。
【図7】フレネルレンズの断面を示す模式図である。
【図8】吸収剤のフィルタ特性を示すグラフである。
【図9】半導体レーザ素子から出射される光の放射特性を示す模式図である。
【図10】レーザ光の放射特性に基づいた半導体レーザ素子の配置を示す模式図である。
【図11】基板に対するフレネルレンズの配置を示す第一の模式図である。
【図12】基板に対するフレネルレンズの配置を示す第二の模式図である。
【図13】基板に対するフレネルレンズの配置を示す第三の模式図である。
【図14】粒子検出装置の動作の流れを示すフローチャートである。
【図15】アオカビ菌の蛍光スペクトルの加熱処理前後の時間変化を示す図である。
【図16】蛍光発光する埃の加熱処理前の蛍光スペクトルを示す図である。
【図17】蛍光発光する埃の加熱処理後の蛍光スペクトルを示す図である。
【図18】粒子検出装置を含む空気清浄機の外観の具体例を示す図である。
【図19】空気清浄機の機能構成の具体例を示すブロック図である。
【発明を実施するための形態】
【0012】
以下、図面に基づいてこの発明の実施の形態を説明する。なお、以下の図面において、同一または相当する部分には同一の参照番号を付し、その説明は繰返さない。
【0013】
[粒子検出装置の全体構造]
図1は、本実施の形態における粒子検出装置1の外観を示す斜視図である。図2は、図1に示す粒子検出装置1の分解状態を示す斜視図である。図3は、粒子検出装置1の構成の詳細を示す分解斜視図である。本実施の形態における粒子検出装置1は、花粉や微生物、カビといった生物由来の粒子を検出するための装置である。
【0014】
本実施の形態における粒子検出装置1は、第一筐体としての上キャビネット2と、第二筐体としての下キャビネット5とを備える。上キャビネット2は、略矩形の平板形状を有する。下キャビネット5は、底を有しかつ一方向に開口する、略直方体の容器形状を有する。上キャビネット2が下キャビネット5の開口を蓋状に閉塞するように、上キャビネット2と下キャビネット5とが組み付けられて、略直方体の外形を有する中空のキャビネットが形成される。
【0015】
捕集部60、励起光学系20、受光光学系30および清掃部96などの、粒子検出装置1を構成する各機器は、ファン92を除き、キャビネットの内部に収容される。一例として、キャビネットは、60mm×50mm(上キャビネット2の縦、横)×30mm(高さ)の大きさを有する。
【0016】
上キャビネット2には、筒状部材としての捕集筒4が一体に形成されている。捕集筒4は、中空の円筒形状を有し、その一端が上キャビネット2の下面に取付けられて、上キャビネット2から粒子検出装置1の内部に向けて延びている。上キャビネット2には、上キャビネット2の一部を厚み方向に貫通する導入部3が形成されており、導入部3を介して粒子検出装置1の外部と捕集筒4の内部とが連通している。捕集筒4は、後述する静電針62を取り囲むように設けられている。粒子を含む空気は、導入部3から捕集筒4の内側へ導入される。捕集筒4は、静電針62と対向して位置決めされた基板10に向けて、粒子を含む空気を案内する。
【0017】
ファン92は、下キャビネット5の底面外側に取付けられている。ファン92が取り付けられた下キャビネット5の底面には、開口部が形成されている。この開口部は、捕集筒4と向かい合う範囲と、後述するブラシ97と向かい合う範囲とを含むように開口し、捕集筒4と向かい合う範囲とブラシ97と向かい合う範囲とで連続的に形成されている。
【0018】
ファン92は、正転方向および反転方向に回転駆動可能である。ファン92が正転方向に駆動されることにより、粒子検出装置1の内部空間の空気がファン92を通じて粒子検出装置1の外部に排出される。ファン92が反転方向に駆動されることにより、粒子検出装置1の外部の空気がファン92を通じて粒子検出装置1の内部空間に導入される。ファン92は、粒子検出装置1内への粒子の捕集、粒子の加熱後の冷却、および、粒子を捕集するための基板10のクリーニングのために、兼用して用いられている。これにより、粒子検出装置1の小型化および低コスト化が図られている。
【0019】
粒子検出装置1は、捕集部60を備える。捕集部60は、空気中に含まれる粒子を、捕集部材としての基板10の主表面11上に捕集する。捕集部60は、高圧電源である捕集電源回路61と、放電電極としての静電針62とを有する。基板10は、主表面11を有する。基板10は、生物由来の粒子と化学繊維の埃などの粉塵とが混合した粒子を主表面11上に捕集する、捕集部材として設けられている。
【0020】
基板10は、シリコン製の平板で形成されている。粒子を吸着する基板10の主表面11には、導電性の透明被膜が形成されている。基板10は、シリコンに限定されず、ガラス、セラミックまたは金属などから形成されてもよい。被膜は、透明被膜に限定されず、たとえば、セラミック等から形成された基板10の表面に、金属被膜が形成されてもよい。また、基板10が金属から形成される場合、その表面に被膜を形成する必要はない。基板10がシリコン基板であれば、材料自体安価であり、主表面11の鏡面加工と、主表面11への導電性被膜の形成が容易である。
【0021】
捕集電源回路61は、基板10と静電針62との間に電位差を生じさせるための電源部として設けられている。静電針62は、捕集電源回路61から延出し、捕集筒4を貫通して捕集筒4の内部に達している。基板10は、静電針62と対向して配置される。本実施の形態では、静電針62が、捕集電源回路61の正極に電気的に接続されている。基板10の主表面11に形成された被膜は、捕集電源回路61の負極に電気的に接続されている。
【0022】
なお、静電針62が捕集電源回路61の正極に電気的に接続され、基板10に形成された被膜が接地電位に接続されてもよい。または、静電針62が捕集電源回路61の負極に電気的に接続され、基板10に形成された被膜が捕集電源回路61の正極に電気的に接続されてもよい。
【0023】
ファン92が正転方向に駆動されると、粒子検出装置1のキャビネット内部の空気が排気されると同時に、キャビネットの外部の空気が捕集筒4を通って基板10に向けて導入される。この際、捕集電源回路61によって静電針62と基板10との間に電位差を発生させると、空気中の粒子は、静電針62の周囲で正極に帯電される。正極に帯電された粒子が、静電気力によって基板10に移動し、基板10の主表面11に形成された導電性の被膜に吸着されることによって、基板10に捕集される。
【0024】
このように本実施の形態における粒子検出装置1においては、静電気力を利用した帯電捕集により、粒子を基板10に捕集する。この場合、粒子の検出時に粒子を確実に基板10に保持するとともに、粒子の検出後には粒子を容易に基板10から除去することができる。放電電極として針状の静電針62を用いることによって、帯電した粒子を、静電針62に対向する基板10の表面であって、後述する発光素子の照射領域に対応した極めて狭い領域に吸着させることができる。これにより、蛍光測定工程において、吸着された微生物を効率的に検出することができる。
【0025】
粒子検出装置1は、励起光学系20と、受光光学系30とを備える。励起光学系20は、基板10の主表面11上に捕集された粒子に向けて励起光を照射する、光照射部としての機能を有する。受光光学系30は、励起光学系20からの励起光の照射に伴って粒子から発せられる蛍光を受光する、受光部としての機能を有する。励起光学系20および受光光学系30は、基板10に捕集された粒子から発する蛍光を検出する蛍光検出部を構成する。励起光学系20および受光光学系30は、基板10に捕集された粒子の加熱前および加熱後の、粒子から発する蛍光の測定を実行する。
【0026】
励起光学系20は、光源としての発光素子21と、励起部フレーム22,23と、集光レンズ24と、レンズ押さえ25とを有する。発光素子21としては、波長405nmの青色のレーザ光を発生する半導体レーザ素子が用いられる。または発光素子21は、LED(Light Emitting Diode)が用いられてもよい。発光素子21から発せられる光は、生物由来の粒子を励起して蛍光を発せさせるものであれば、紫外または可視いずれの領域の波長を有してもよい。
【0027】
受光光学系30は、金属製のノイズシールド36と、受光素子34と、受光部フレーム33と、フレネルレンズ32と、レンズ押さえ31とを有する。受光素子34としては、フォトダイオードまたはイメージセンサなどが用いられる。受光素子34とノイズシールド36との間には、受光素子34で検出された信号を増幅するための増幅回路55が設けられている。
【0028】
清掃部96は、粒子を基板10の主表面11から除去する。清掃部96は、清掃具としてのブラシ97と、ブラシ固定部98とを有する。清掃部96は、捕集電源回路61に対して固定支持されている。
【0029】
ブラシ97は、導電性を有する繊維集合体から形成されている。ブラシ97は、たとえば、カーボンファイバから形成されている。ブラシ97を形成する繊維集合体の線径は、φ0.05mm以上φ0.2mm以下であることが好ましい。ブラシ97の一端は、ブラシ固定部98に支持され、他端はブラシ固定部98から垂れ下がる自由端として形成されている。ブラシ97の自由端が基板10の主表面11に接触した状態で、基板10に対しブラシ51が相対移動することにより、粒子が基板10から除去される。
【0030】
基板10から粒子を除去する捕集具は、ブラシ97に限られるものではない。たとえば捕集具は、基板10の主表面11と接触する平板状のワイパーであってもよいし、基板10の主表面11に向けて空気を噴き出すノズルであってもよい。
【0031】
粒子検出装置1は、基板10を搭載し保持する保持部材80と、基板10を移動させる移動機構部としての駆動部70とをさらに備える。駆動部70は、回転駆動可能な回転モータ71と、回転モータ71を保持するモータホルダ72と、回転モータ71の位置決めをするモータ押さえ73とを有する。
【0032】
保持部材80は、回転ベース81を有する。回転ベース81は、熱伝導率の低い樹脂材料により形成されている。回転ベース81には、軸穴82が形成されている。軸穴82に回転モータ71の出力軸が挿通されることにより、回転モータ71と回転ベース81とが連結されている。回転モータ71の駆動に伴って、回転ベース81は、軸穴82の位置を中心に回転(正転、反転)する。
【0033】
保持部材80は、回転ベース81の回転軸から離れる方向に延びるアーム部83を有する。アーム部83は、回転ベース81の回転軸に対し直交する径方向に延伸し、その先端に枠形状部を有する。枠形状部は、基板10を収容可能な形状に形成されている。基板10は、アーム部83の先端の枠形状部に収容されることにより、保持部材80に搭載される。
【0034】
粒子検出装置1は、加熱部としてのヒータ91を備える。ヒータ91は、基板10の裏面側に配置され、基板10の主表面11上に捕集された粒子を加熱する。基板10の裏面には、ヒータ91が貼り合わされている。ヒータ91は、回転ベース81の回転時、基板10とともに移動する。ヒータ91には、ヒータ91への電力供給線や、ヒータ91に内蔵されたセンサの信号線を含む、複数の配線が接続されている。これら配線は、粒子検出装置1のキャビネットの外部に引き出されている。
【0035】
下キャビネット5の側面には、位置センサ76が配置されている。基板10は、回転モータ71の回転により、粒子検出装置1のキャビネット内を移動する。基板10の現在位置を検出するために、位置センサ76が設けられている。
【0036】
[蛍光検出部の構成]
図4は、粒子検出装置1の断面図である。図5は、粒子検出装置1に含まれる光学系による光の挙動を示す模式図である。図6は、基板10の主表面11における光の反射を示す模式図である。
【0037】
上述したように、基板10の主表面11に励起光を照射するための励起光学系20は、発光素子21と、集光レンズ24とを有する。半導体レーザ素子である発光素子21で発生した励起光ELは、集光レンズ24を経由して集光され、基板10の主表面11の励起光照射領域104に照射される。励起光ELは、基板10の主表面11に対して斜めに入射する。図5および図6において符号OD1が付された一点鎖線は、励起光ELの光線方向を示す。ここで、光線方向とは、光(この場合は励起光EL)の光束成分の進行する方向をいう。励起光ELの光線方向OD1は、励起光学系20の光軸ということもできる。
【0038】
基板10の主表面11は、鏡面である。主表面11に対して入射角θで入射する励起光ELは、主表面11において鏡面反射する。主表面11で励起光ELが正反射した光は、反射光RLを形成する。図5および図6において符号OD2が付された一点鎖線は、反射光RLの光線方向を示す。励起光ELが基板10の主表面11に対して斜めに入射するため、主表面11で鏡面反射する反射光RLも主表面11に対して斜めに反射する。
【0039】
図6において符号Aが付された一点鎖線は、受光光学系30の光軸、すなわちフレネルレンズ32の光軸を示す。励起光ELの光線方向OD1、および反射光RLの光線方向OD2は、光軸Aと交差している。光線方向OD1,OD2は、光軸Aに対して傾斜している。光線方向OD1,OD2は、基板10の主表面11の延びる方向に対して傾斜している。また図6には、基板10の主表面11とフレネルレンズ32との間の距離Tが図示されている。
【0040】
主表面11が鏡面に形成されているので、主表面11において励起光ELが散乱することによる迷光の発生が防止される。そのため、迷光がノイズとなり粒子検出装置1の検出精度が低下することを防止できる構成とされている。主表面11が鏡面である場合、主表面11での励起光ELの反射の際に散乱光が殆ど発生しないので、励起光ELが主表面11で正反射した反射光RLのみの受光光学系30への混入を防止することで、迷光による混信を防止できる。指向性が小さく一様に発生する散乱光を光路の設定により分離するのは困難であり、散乱光が発生すると高価なフィルタを使用する必要があるが、本実施の形態では、散乱光の発生を防止できるので、フィルタの設置を不要とし、装置の小型化および低コスト化が達成されている。
【0041】
励起光照射領域104には、粒子100が捕集されている。粒子100は、微生物などの生物由来の粒子101と、化学繊維の埃などの非生物由来の塵埃102とを含む。図5において符号Fが付された矢印は、粒子100が発した蛍光を示す。蛍光Fは、粒子100の表面の励起光ELが照射された部分から全方位に向かって放出される。受光光学系30へ向かう蛍光Fは、フレネルレンズ32を経由して集光され、受光素子34により受光される。蛍光Fを集光するための集光レンズをフレネルレンズ32にすることで、集光レンズを薄型化できるので、粒子検出装置1の小型化および軽量化を達成できる。
【0042】
蛍光Fは、励起光ELが照射された粒子100から、全方位に指向性なく放出される。蛍光Fの一部は、粒子100から直接フレネルレンズ32へ向かい、蛍光Fの他の一部は、粒子100から基板10の主表面11へ向かって放出される。主表面11が鏡面であれば、主表面11で蛍光Fが鏡面反射され、反射された蛍光Fはフレネルレンズ32へ向かうので、フレネルレンズ32で集光され受光素子34で受光される蛍光Fの強度を増大できる。これにより、受光素子34における蛍光Fの検出感度を向上することができる。
【0043】
フレネルレンズ32を基板10の主表面11から距離Tだけ離れた位置に配置することにより、基板10の主表面11へ向かう励起光ELおよび主表面11で正反射した反射光RLは、フレネルレンズ32へ入射しない。フレネルレンズ32に入射する光は、粒子100が発する蛍光Fのみに限定され、励起光ELと反射光RLとの両方がフレネルレンズ32により集光されない。励起光ELと反射光RLとがフレネルレンズ32に入射されず、受光素子34が励起光ELと反射光RLとを受光しない位置に、受光光学系30が配置される。このようにすれば、励起光ELおよび反射光RLと蛍光Fとを確実に分離でき、励起光ELまたは反射光RLが蛍光Fの検出に対するノイズとなることを回避できるので、蛍光Fの検出感度を向上することができる。
【0044】
図7は、フレネルレンズ32の断面を示す模式図である。フレネルレンズ32は、母材32aと、母材32a中に細かく分散された吸収剤32bとを有する材料により形成されている。母材32aは、フレネルレンズ32として使用できる任意の材料により形成されており、たとえば蛍光Fを透過するアクリル材またはガラス材で形成されてもよい。吸収剤32bは、励起光ELの波長を含む光線を吸収する。吸収剤32bは、励起光ELの波長を含む光線がフレネルレンズ32を透過するのを妨げる。フレネルレンズ32は、励起光ELおよび反射光RLを遮断するフィルタ機能を有している。
【0045】
図8は、吸収剤32bのフィルタ特性を示すグラフである。図8のグラフの横軸は光の波長を示す。波長の単位はnmである。図8のグラフの縦軸はフィルタの透過率および光のスペクトル強度を示す。フィルタの透過率の単位は%である。光のスペクトル強度は、励起光ELまたは蛍光Fのスペクトル強度が最大となる波長を100としたときの、各波長でのスペクトル強度の相対値を示す。図8中の曲線(1)がフィルタ特性、曲線(2)が半導体レーザ素子による励起光ELのスペクトル強度、曲線(3)が励起光ELを照射された青カビ菌から発せられる蛍光Fのスペクトル強度を示す。
【0046】
曲線(1)に示すフィルタ特性によると、吸収剤32bは、約440nm以下の波長を有する光をほぼ遮断し、約500nm以上の波長を有する光をほぼ透過させる特性を有する。吸収剤32bは、所定の閾値以下の波長の光を遮り、閾値以上の波長の光を透過させる、ハイパスフィルタ(またはローカットフィルタ)としての特性を有する。
【0047】
曲線(2)に示すように、半導体レーザによる励起光ELは、約400nmの波長に光スペクトル強度のピーク値を有し、他の波長域ではスペクトルが測定されない。一方曲線(3)に示すように、青カビ菌からの蛍光Fは、約460nm以上の波長域においてスペクトルが測定され、約530nmの波長に光スペクトル強度のピーク値を有する。
【0048】
曲線(1)のフィルタ特性を有する吸収剤32bをフレネルレンズ32に分散させることにより、曲線(2)に示す光スペクトル強度を有する励起光ELがフレネルレンズ32に入射すると、励起光ELは吸収剤32bに吸収されて遮断される。一方、曲線(3)に示す光スペクトル強度を有する蛍光Fがフレネルレンズ32に入射すると、蛍光Fは光スペクトル強度をほぼ維持したまま、フレネルレンズ32を透過する。
【0049】
このようなフィルタ機能をフレネルレンズ32に持たせることで、フレネルレンズ32に誤って励起光ELまたは反射光RLが入射しても、フレネルレンズ32において励起光ELまたは反射光RLを遮断することができる。したがって、蛍光Fが選択的にフレネルレンズ32を透過する構成が提供されるので、蛍光Fを検出する受光素子34へのノイズの混入を抑制でき、蛍光Fの検出感度を向上することができる。フレネルレンズ32自体がフィルタ機能を有するので、フレネルレンズ32とは別にフィルタを設ける必要がなく、構成を簡略化できるので安価である。
【0050】
図9は、半導体レーザ素子から出射される光の放射特性を示す模式図である。本実施の形態の発光素子21である半導体レーザ素子は、発光層を含む積層構造を有する、端面発光型である。半導体レーザ素子は、n型GaAsからなる基板214、n型AlGaInPからなる下クラッド層212、多重量子井戸からなる活性層211、p型AlGaInPからなる上クラッド層213、p型GaAsからなるコンタクト層216が積層されて構成される。下クラッド層212、活性層211および上クラッド層213は、積層構造210を構成する。積層構造210を構成する各半導体層の積層方向を、図9中の符号LDが付された両矢印で示す。
【0051】
半導体レーザ素子はまた、基板214側に設けられたn型電極215と、コンタクト層216側に設けられたP型電極217と、リッジストライプ218と、n型AlInPからなる電流ブロック層219とを有する。リッジストライプ218と電流ブロック層219とは、積層構造210とコンタクト層216との間に配置されている。
【0052】
励起光ELが出射する発光部220は、活性層211を含む。発光部220は、半導体レーザ素子の光出射面において、横長に形成されている。たとえば、積層方向LDと直交する幅方向における発光部220の寸法を、活性層211の厚みで割った比の値が、50以上となるように、発光部220を形成することができる。このようなストライプ状の発光部220を有する半導体レーザ素子は、いわゆるブロードエリア(BA)型の半導体レーザを構成する。
【0053】
BA型の半導体レーザ素子では、発光部220が横長になっており、縦方向のスペースが狭いため、発光部220から出た光は回折作用によって回り込むような形で拡がる。そのため、出射された励起光ELは、半導体層の積層構造210の積層方向LDにおける広がりが、積層方向LDに直交する幅方向における広がりよりも大きくなるように広がる。上記光の回折効果によって、BA型の半導体レーザ素子から出射される励起光ELの放射特性は、半導体レーザの積層方向LDにおける励起光ELの拡がり角度が大きく、積層方向に直交する幅方向の拡がり角度が小さい、帯状になる。
【0054】
つまり、端面発光型の半導体レーザ素子から出射される励起光ELの放射特性は、半導体層の積層構造210の積層方向LDに長い、帯状になる。半導体レーザ素子から出射された励起光ELは、半導体層の積層方向LDに相対的に大きく、幅方向に相対的に小さく広がる特性を有している。そのため、半導体レーザ素子の光出射面に平行な面において、半導体層の積層方向LDにおける励起光ELの寸法を幅方向における励起光ELの寸法で割った比の値は、光線が半導体レーザ素子から離れるにつれて大きくなる。そこで、このような帯状の励起光ELが基板10の主表面11に最適な形状の励起光照射領域104を形成するように、半導体レーザ素子を配置する。
【0055】
図10は、レーザ光の放射特性に基づいた半導体レーザ素子の配置を示す模式図である。図10に示すように、発光層である活性層211を含む半導体層の積層構造210を有する半導体レーザ素子である発光素子21を、半導体層の積層方向LDが主表面11の延在方向に沿い、積層方向LDが基板10の主表面11に平行であるように、配置する。
【0056】
このようにBA型の半導体レーザ素子の配置を揃えることにより、半導体レーザ素子から出射された励起光ELが帯状に広がる光の長手方向を、基板10の主表面11に平行な方向に揃えることができる。励起光ELは、基板10の主表面11に対して傾斜する方向に沿って主表面11に照射され、これにより帯状に広がる励起光ELは、基板10の主表面11において当該帯状の短手方向に広げられる。主表面11に照射される励起光ELは、長手方向の広がりと短手方向の広がりとがほぼ等しくなり、対称な形状の励起光照射領域104を形成する。
【0057】
たとえば、図9および図10において模式的に長円状に広がる励起光ELを発生する半導体レーザ素子を、半導体層の積層方向LDが基板10の主表面11に平行であるように配置する。これにより、基板10の主表面11において、長円の短手方向に励起光ELが広がるので、主表面11に形成される励起光照射領域104はほぼ真円の形状になる。そのため、励起光照射領域104の面積を小さくでき、主表面11に捕集された粒子100に照射される励起光ELを高密度化できる。したがって、粒子100から発生する蛍光Fの強度を増大させ、受光素子34での蛍光Fの検出精度を向上できるので、粒子100の量の高感度な検出が可能になる。
【0058】
主表面11上のある程度の広がりを持つ領域に励起光ELが照射され、所定の面積を有する励起光照射領域104が形成されるのが望ましい。主表面11上に広がりを有する励起光照射領域104を形成することにより、基板10の主表面11に捕集された粒子100のうちのより多くの粒子100に励起光ELを照射することができるので、粒子の検出精度を向上することができる。他方、基板10の主表面11を外れた領域に励起光ELが照射されると散乱して迷光になり、この迷光は蛍光Fの検出精度を低下させる。このような迷光の発生を防止するには、励起光ELの全てを基板10に照射する必要がある。この場合、励起光照射領域104が大きく広がっていると、基板10を大きくする必要があり、粒子検出装置1が大型化する問題がある。
【0059】
そこで、図10に示すように、基板10の主表面11上で励起光ELを円形にし、円形の励起光照射領域104を形成すれば、蛍光Fの検出精度の低下を回避し、かつ装置の大型化を抑制できるので、検出精度に優れ小型化に適した粒子検出装置1を提供することができる。
【0060】
図11〜13は、基板10に対するフレネルレンズ32の配置を示す模式図である。図11に示すように、励起光ELおよび反射光RLが光線方向に対する広がりを有さず略ゼロの直径を有すると仮定した場合、励起光ELは代表的に光線方向OD1で示され、反射光RLは代表的にOD2で示される。励起光ELは入射角θで基板10の主表面11に入射する。主表面11が鏡面として形成されているために、主表面11において励起光ELは正反射し、入射角と同じ反射角θで反射光RLが反射する。
【0061】
励起光ELおよび反射光RLの直径が略ゼロである場合のフレネルレンズ32は、直径L0を有するように形成されている。入射角が角度θである励起光ELおよび反射角が角度θである反射光RLが直径L0のフレネルレンズ32に干渉しないために、フレネルレンズ32は基板10の主表面11から距離Tだけ離れた位置に配置されている。この場合、tanθ=(L0/2)/T=L0/2Tの関係が成立する。
【0062】
図12および図13には、励起光ELおよび反射光RLが直径Bを有するとする場合に、図11と同じく距離Tだけ主表面11から離れて配置されるフレネルレンズ32に励起光ELおよび反射光RLが干渉しないための条件を示す。励起光ELおよび反射光RLが光線方向OD1,OD2に対する広がりを有するので、フレネルレンズ32は、図11に示す直径L0よりも小さい、直径Lを有するように形成される。
【0063】
この場合、図13を参照して、(B/2)/{(L0−L)/2}=cosθの関係が成立し、整理すると、L0=B/cosθ+Lとなる。この関係式を上述した式に代入すると、tanθ=(B/cosθ+L)/2Tとなる。結局、基板10とフレネルレンズ32との距離Tは、角度θの関数として、T=(B/cosθ+L)/2tanθと表される。この距離Tは、フレネルレンズ32の直径L、励起光ELの直径Bである場合に、励起光ELの入射角が角度θであるとき、励起光ELおよび反射光RLとフレネルレンズ32との干渉を防止するために、基板10の主表面11からフレネルレンズ32を離す必要のある距離の最小値を示す。
【0064】
つまり、励起光ELおよび反射光RLとフレネルレンズ32とが干渉しないためには、上式により求められる距離T以上、フレネルレンズ32を基板10の主表面11から離して配置すればよい。一方、フレネルレンズ32を基板10に近づけて配置するほど、光学系の小型化が可能になり、したがって粒子検出装置1を小型化できる。加えて、基板10の主表面11に捕集された粒子100にフレネルレンズ32を近づけるほど、粒子100から放出される蛍光Fの受光効率が向上し、蛍光Fの検出精度が向上する。これは、蛍光Fは粒子100から全方向に指向性なく放出されるため、粒子100にフレネルレンズ32を近づけるほどより広い角度の範囲の蛍光Fを受光できることによる。したがって、距離Tと角度θとの間にT=(B/cosθ+L)/2tanθの関係が成立するように、フレネルレンズ32と基板10との相対位置を定めるのが望ましい。
【0065】
励起光ELの入射角θを大きくし、励起光ELの主表面11に対する傾斜を小さくすれば、T=(B/cosθ+L)/2tanθで求められる距離Tの値が小さくなる。つまり、励起光ELの入射角θを大きくするほど、フレネルレンズ32を基板10に近づけても反射光RLがフレネルレンズ32に入射しなくなる。よって、フレネルレンズ32を基板10により近接させて配置することができ、粒子検出装置1をより小型化することが可能になる。たとえば入射角θを60°以上の範囲に設定するのが望ましい。
【0066】
しかしながら、入射角θが大きすぎると、励起光ELの光線方向OD1が主表面11に平行な方向に近づくことになる。そのため、励起光学系20に近い位置に捕集された粒子100には励起光ELが照射されるが、励起光学系20から離れる位置に捕集された粒子100が励起光学系20に近い粒子100の陰に隠れ、励起光学系20から離れる粒子100に励起光ELが照射されなくなる。この場合、基板10に捕集された全ての粒子100が蛍光Fを放出しなくなるので、基板10への粒子100の捕集量に対応する強度の蛍光Fを検出できず、粒子量の検出精度が低下する問題がある。したがって、たとえば入射角θを、70°以下の範囲に設定するのが望ましい。
【0067】
[粒子検出装置の動作]
以上の構成を有する粒子検出装置1を用いて生物由来の粒子101の量を検出する動作について説明する。図14は、粒子検出装置1の動作の流れを示すフローチャートである。
【0068】
図14を参照して、まず、基板10の主表面11に、粒子100を捕集する(S101)。このとき、ファン92を正転方向に駆動させることによって、粒子検出装置1のキャビネット内に導入部3を経由させて空気を導入し、基板10の主表面11へ向かう空気の流れを形成する。加えて、静電針62を基板10の主表面11に対向配置するとともに、捕集電源回路61によって静電針62と基板10との間に電位差を発生させる。これにより、空気中に浮遊する粒子100を帯電させ、帯電された粒子100を静電気力によって基板10の主表面11に捕集する。
【0069】
次に、励起光学系20によって、基板10に捕集された粒子100へ向けて励起光ELを照射するとともに、受光光学系30によって、励起光ELの照射に伴って粒子100から発せられる蛍光Fを受光する。半導体レーザ素子である発光素子21から励起光ELを粒子100に向けて照射し、このとき粒子100から発せられる蛍光Fをフレネルレンズ32を通じて受光素子34にて受光する。これにより、基板10に捕集された粒子100の加熱前の蛍光強度を測定する(S102)。
【0070】
次に、ヒータ91に通電することによって、基板10に捕集された粒子100を加熱する(S103)。次に、ヒータ91への通電を停止して、基板10を冷却する(S104)。この際、ファン92を反転方向に駆動させることによって、ファン92を経由して空気を粒子検出装置1のキャビネット内に導入し、基板10の冷却を促進させる。
【0071】
次に、励起光学系20によって、基板10に捕集された粒子100に向けて励起光ELを照射するとともに、受光光学系30によって、励起光ELの照射に伴って粒子100から発せられる蛍光Fを受光する。これにより、基板10に捕集された粒子100の加熱後の蛍光強度を測定する(S105)。加熱前の蛍光Fの強度と加熱後の蛍光Fの強度とを比較することにより、基板10に捕集された粒子100に含まれる生物由来の粒子101の量を算出する(S106)。
【0072】
図15は、アオカビ菌の蛍光スペクトルの加熱処理前後の時間変化を示す図である。図15には、生物由来の粒子101の一例として、アオカビ菌を200℃にて5分間加熱処理したときの加熱処理前(曲線C1)および加熱処理後(曲線C2)の蛍光スペクトルの測定結果である。これらに示されるように、加熱処理を施すことによってアオカビ菌からの蛍光強度が大幅に増加していることが分かる。
【0073】
図16は、蛍光発光する埃の加熱処理前の蛍光スペクトルを示す図である。図17は、蛍光発光する埃の加熱処理後の蛍光スペクトルを示す図である。図16および図17のそれぞれは、蛍光を発する埃を200℃にて5分間加熱処理したときの加熱処理前(曲線C3)および加熱処理後(曲線C4)の蛍光スペクトルの測定結果である。曲線C3により示された蛍光スペクトルと曲線C4により示された蛍光スペクトルとを重ねると、これらはほぼ重なることが検証される。すなわち、埃からの蛍光強度は加熱処理の前後において変化がないことが分かる。
【0074】
空気中に浮遊する生物由来の粒子101に紫外光または青色光を照射すると、生物由来の粒子101は蛍光Fを発する。しかしながら、空気中には化学繊維の埃などの、同様に蛍光を発する塵埃102が浮遊しており、蛍光Fを検出するのみでは、生物由来の粒子101からのものであるのか塵埃102からのものであるのかが区別されない。
【0075】
一方、生物由来の粒子101および塵埃102に対してそれぞれ加熱処理を施し、加熱前後における蛍光強度(蛍光量)の変化を測定すると、塵埃102から発せられる蛍光強度が加熱処理によって変化しないのに対して、生物由来の粒子101から発せられる蛍光強度は、加熱処理によって増加する。本実施の形態における粒子検出装置1では、生物由来の粒子101と塵埃102とが混合する粒子100に対して、加熱前後の蛍光強度を測定し、その差分を求めることにより、生物由来の粒子101の量を特定する。
【0076】
生物由来の粒子101から発せられる蛍光Fの強度は、加熱処理によって増加する。このため、ステップ(S105)では、ステップ(S102)の加熱前の蛍光測定で測定された蛍光強度よりも大きい値の蛍光強度が測定される。加熱前の蛍光強度と加熱後の蛍光強度との差から、蛍光強度の増大量を算出する。予め用意した蛍光強度の増大量と生物由来の粒子濃度との関係に基づき、算出された増大量に対応する生物由来の粒子101の濃度を特定することができる。なお、増大量と生物由来の粒子濃度との対応関係は、予め実験的に決められる。
【0077】
[粒子除去装置の構成]
本実施の形態における粒子検出装置1は、生物由来の粒子101を検出するための装置単体として用いられてもよいし、空気清浄機やエアーコンディショナ、加湿器、除湿機、掃除機、冷蔵庫、テレビなどの家電製品に組み込まれてもよい。図18は、粒子検出装置1を含む空気清浄機300の外観の具体例を示す図である。空気清浄機300は、粒子検出装置1により検出された生物由来の粒子101を効率的に除去するための、粒子除去装置の一例である。
【0078】
空気清浄機300は、操作指示を受け付けるためのスイッチ310と、検出結果などを表示するための表示パネル330とを含む。その他、図示されない、空気を導入するための吸引口、排気するための排気口、などを含む。さらに、空気清浄機300は、記録媒体を装着するための通信部350を含む。通信部350は、インターネットを介して他の装置と通信するための通信回線を接続するためのものであってもよい。または、通信部350は、赤外線通信やインターネット通信などで他の装置と通信するためのものであってもよい。粒子検出装置1は、空気清浄機300の筐体の内部に配置される。生物由来の粒子101を精度よく検出できるとともに小型化を達成できる粒子検出装置1を備えることにより、空気清浄機300は、周辺の空気を効率よく清浄化できる。
【0079】
図19は、空気清浄機300の機能構成の具体例を示すブロック図である。図19では、信号処理部50の機能が主に電気回路であるハードウェア構成で実現される例が示されている。しかしながら、これら機能のうちの少なくとも一部は、信号処理部50が図示しないCPU(Central Processing Unit)を備え、該CPUが所定のプログラムを実行することによって実現される、ソフトウェア構成であってもよい。また、測定部40の構成がソフトウェア構成である例が示されている。しかしながら、これら機能のうちの少なくとも一部は、電気回路などのハードウェア構成で実現されてもよい。
【0080】
図19を参照して、信号処理部50は、受光素子34に接続される電流−電圧変換回路54と、電流−電圧変換回路54に接続される積分型の増幅回路55とを含む。
【0081】
測定部40は、制御部41、記憶部42、およびクロック発生部43を含む。さらに、測定部40は、スイッチ310の操作に伴ったスイッチ310からの入力信号を受け付けることで情報の入力を受け付けるための入力部44と、表示パネル330に測定結果等を表示させる処理を実行するための表示部45と、通信部350に接続された外部装置とのデータ等のやり取りに必要な処理を行なうための外部接続部46と、ファン92およびヒータ91を駆動させるための駆動部48とを含む。
【0082】
基板10の主表面11上に捕集された粒子100に対して発光素子21から励起光ELが照射されることで、励起光照射領域104にある当該粒子100からの蛍光Fが、受光素子34に集光される。受光素子34から、受光量に応じた電流信号が信号処理部50に対して出力される。電流信号は、電流−電圧変換回路54に入力される。
【0083】
電流−電圧変換回路54は、受光素子34から入力された電流信号より蛍光強度を表わすピーク電流値Hを検出し、電圧値Ehに変換する。電圧値Ehは増幅回路55で予め設定した増幅率に増幅され、測定部40に対して出力される。測定部40の制御部41は信号処理部50から電圧値Ehの入力を受け付けて、順次、記憶部42に記憶させる。
【0084】
クロック発生部43はクロック信号を発生させ、制御部41に対して出力する。制御部41は、クロック信号に基づいたタイミングで、ファン92を回転させるための制御信号を駆動部48に対して出力して、ファン92による空気の導入を制御する。また、制御部41は発光素子21および受光素子34と電気的に接続され、それらのON/OFFを制御する。
【0085】
制御部41は計算部411を含み、計算部411において、記憶部42に記憶された電圧値Ehを用いて、導入された空気中の生物由来の粒子量を算出するための動作が行なわれる。
【0086】
計算部411で算出された捕集された粒子100中の生物由来の粒子101の濃度は、制御部41から表示部45に対して出力される。表示部45は、入力された微生物の濃度を、表示パネル330に表示させるための処理を行なう。たとえば、表示パネル330には、濃度ごとのランプが備えられ、表示部45は、算出された濃度に対応したランプを点灯するランプとして特定し、該ランプを点灯する。他の例として、算出された濃度ごとに、ランプを異なる色に点灯させてもよい。また、表示パネル330はランプ表示に限定されず、数字を表示したり、濃度や対応して予め用意されているメッセージを表示したりしてもよい。また、測定結果は、外部接続部46によって、通信部350に装着された記録媒体に書き込まれてもよいし、通信部350を介して外部装置に送信されてもよい。
【0087】
入力部44はスイッチ310からの操作信号に従って、表示パネル330での表示方法の選択を受け付けてもよい。または、測定結果を、表示パネル330に表示するか、外部装置に出力するか、の選択を受け付けてもよい。その内容を示す信号は、制御部41に対して出力され、制御部41から表示部45および/または外部接続部46に対して必要な制御信号が出力される。
【0088】
粒子検出装置1は、生物由来の粒子101からの蛍光Fと蛍光Fを発する塵埃102からの蛍光Fとの加熱処理による性質の差を利用し、所定の加熱処理後の増大量に基づいて生物由来の粒子101を検出する。そのため、導入された空気中に蛍光Fを発する塵埃102が含まれている場合であっても、粒子検出装置1は、リアルタイムに、かつ精度よく、生物由来の粒子101を、蛍光を発する塵埃102から分離して検出する。
【0089】
空気清浄機300は、この粒子検出装置1により検出された生物由来の粒子101の濃度を利用して、粒子検出装置1の出力に応じて運転状態を変化させることにより、生物由来の粒子101を効率的に除去することができる。すなわち、粒子検出装置1の出力が大きく生物由来の粒子101の濃度が高い場合には、たとえばファン92を高速回転させ通風量を増加させることにより、空気清浄機300による粒子除去能力を向上させることができる。粒子検出装置1の出力が小さく生物由来の粒子101の濃度が低い場合には、粒子除去能力を低下できるので、ファン92の回転数を低下させて通風量を減少させ、省電力化した運転を行なうことができる。
【0090】
以上のように本発明の実施の形態について説明を行なったが、今回開示された実施の形態はすべての点で例示であって、制限的なものではないと考えられるべきである。この発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味、および範囲内でのすべての変更が含まれることが意図される。
【産業上の利用可能性】
【0091】
この発明は、主に、花粉や微生物、カビといった生物由来の粒子を検出する装置として利用される。
【符号の説明】
【0092】
1 粒子検出装置、10 基板、11 主表面、20 励起光学系、21 発光素子、24 集光レンズ、30 受光光学系、32 フレネルレンズ、32a 母材、32b 吸収剤、34 受光素子、100 粒子、101 生物由来の粒子、102 塵埃、104 励起光照射領域、210 積層構造、211 活性層、220 発光部、300 空気清浄機、A 光軸、B 光の直径、EL 励起光、F 蛍光、L,L0 レンズの直径、LD 積層方向、OD1,OD2 光線方向、RL 反射光、T 距離、θ 入射角。
【特許請求の範囲】
【請求項1】
主表面を有し、前記主表面上に生物由来の粒子を捕集する捕集部材と、
前記主表面上に捕集された前記粒子に励起光を照射する光照射部と、
前記光照射部からの前記励起光を前記粒子に照射したとき前記粒子から発する蛍光を受光する受光部とを備えた、生物由来の粒子を検出する粒子検出装置であって、
前記受光部の光軸と、前記励起光の光線方向とは交差しており、
前記主表面は鏡面である、粒子検出装置。
【請求項2】
前記蛍光は、前記主表面で鏡面反射する、請求項1に記載の粒子検出装置。
【請求項3】
前記光照射部は、端面発光型の半導体レーザ素子を含み、
前記半導体レーザ素子は、発光層を含む積層構造を有し、前記積層構造の積層方向が前記主表面に平行であるように配置されている、請求項1から請求項2に記載の粒子検出装置。
【請求項4】
前記受光部は、集光レンズを含み、
前記集光レンズは、前記励起光を吸収する材料を含む、請求項1から請求項3のいずれかに記載の粒子検出装置。
【請求項5】
前記集光レンズは、フレネルレンズである、請求項4に記載の粒子検出装置。
【請求項6】
前記励起光の前記主表面への入射角をθ、前記集光レンズの直径をL、前記集光レンズと前記主表面との距離をT、前記励起光の直径をBとすると、
T=(B/cosθ+L)/2tanθ
の関係が成立する、請求項4または請求項5に記載の粒子検出装置。
【請求項1】
主表面を有し、前記主表面上に生物由来の粒子を捕集する捕集部材と、
前記主表面上に捕集された前記粒子に励起光を照射する光照射部と、
前記光照射部からの前記励起光を前記粒子に照射したとき前記粒子から発する蛍光を受光する受光部とを備えた、生物由来の粒子を検出する粒子検出装置であって、
前記受光部の光軸と、前記励起光の光線方向とは交差しており、
前記主表面は鏡面である、粒子検出装置。
【請求項2】
前記蛍光は、前記主表面で鏡面反射する、請求項1に記載の粒子検出装置。
【請求項3】
前記光照射部は、端面発光型の半導体レーザ素子を含み、
前記半導体レーザ素子は、発光層を含む積層構造を有し、前記積層構造の積層方向が前記主表面に平行であるように配置されている、請求項1から請求項2に記載の粒子検出装置。
【請求項4】
前記受光部は、集光レンズを含み、
前記集光レンズは、前記励起光を吸収する材料を含む、請求項1から請求項3のいずれかに記載の粒子検出装置。
【請求項5】
前記集光レンズは、フレネルレンズである、請求項4に記載の粒子検出装置。
【請求項6】
前記励起光の前記主表面への入射角をθ、前記集光レンズの直径をL、前記集光レンズと前記主表面との距離をT、前記励起光の直径をBとすると、
T=(B/cosθ+L)/2tanθ
の関係が成立する、請求項4または請求項5に記載の粒子検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−57626(P2013−57626A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−197196(P2011−197196)
【出願日】平成23年9月9日(2011.9.9)
【特許番号】特許第5112553号(P5112553)
【特許公報発行日】平成25年1月9日(2013.1.9)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月9日(2011.9.9)
【特許番号】特許第5112553号(P5112553)
【特許公報発行日】平成25年1月9日(2013.1.9)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]