
粒子線治療を施す装置および方法
標的部位をビームで囲むための装置を提供する。標的部位は標的体内に位置する。ビーム経路は、アイソセンタがその頂点にある円錐を形成するように回転して変化する。このアイソセンタは、標的部位のほぼ中心に固定される。標的の体は、標的部位のほぼ中心を通過する垂直軸線回りに回転し、ビーム経路および体の回転速度は、ビームがほぼ一定角度で標的部位を通過する軸線と交差するように、それぞれ対応する。

【発明の詳細な説明】
【背景技術】
【0001】
癌細胞を攻撃および破壊するために、これらに限定されないものの、陽子、重イオン(例えば炭素等)、および中間子を含む粒子の方向付けられたビームを使用することが知られている。粒子治療は、患者の体内の特定の深さに粒子線を向けることができる点において、従来の放射線治療よりも優れている。その理由は、x線ビームと異なり、粒子線が、当該粒子線が通過する組織内にほとんどエネルギーを付与せず、当該粒子線の端点に大量のエネルギーを付与するので、介在する組織に対して最小の損傷で癌細胞を殺すことができるからである。例えば最大360度の円弧に亘って様々に異なる方向から腫瘍にビームが到達するように構成することによって、腫瘍の周辺組織への放射線量は更に低減される。従来の粒子治療は、粒子加速器またはサイクロトロン内に高速移動の粒子のビームを生成することを含む。そして、ビームは所望の経路に沿って患者に向けられる。ビームは標的部位の全周に伝達されなければならないので、現在のシステムは、患者の周りを回転するガントリから患者にビームを向けている。
【0002】
従来の粒子治療装置では、患者を水平姿勢に配置して、大型のガントリアセンブリ内に配置された磁石を使用して周囲360度の位置から患者にビームを向けている。粒子線発生器、全体で180度近くまでビームを偏向させることが必要とされる磁石、およびガントリのサイズのため、この構成は、膨大なコストのかかる深い掘削を必要とする。現在のシステムは、4メートル以上の直径で90トンを超える重量のガントリを組み込んでいる。更に、ビームの方向を変化させることは、治療領域の全周周りに広範囲の放射能遮蔽物を必要とする。
【発明の概要】
【0003】
従って、より小型で簡易な構造を要する粒子治療装置および方法が必要とされている。
【図面の簡単な説明】
【0004】
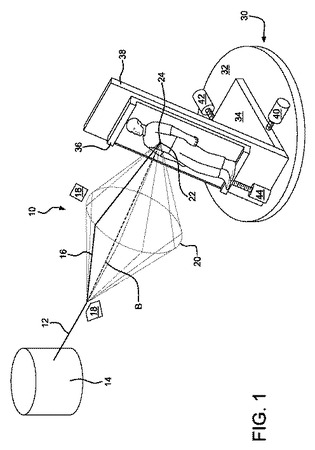
【図1】治療周期の間のビームの回転を示す一方で患者の回転を示していない、本発明のシステムの実施形態の等角図である。
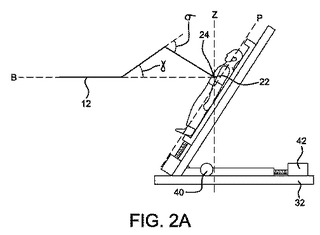
【図2A】治療周期中のある一点におけるビームおよび患者の位置を示す、図1のシステムの実施形態の側面図である。
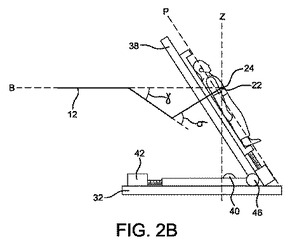
【図2B】周期中の第2点におけるビームおよび患者の位置を示す、図1のシステムの実施形態の第2の側面図である。
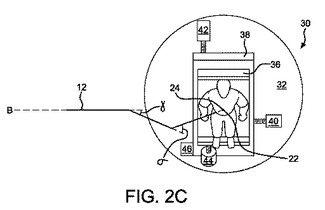
【図2C】周期中の第3点におけるビームおよび患者の位置を示す、図1のシステムの実施形態の平面図である。
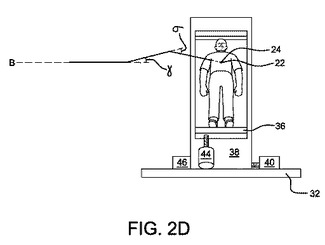
【図2D】図2Cに示す周期中の一点におけるビームおよび患者の位置の正面図である。
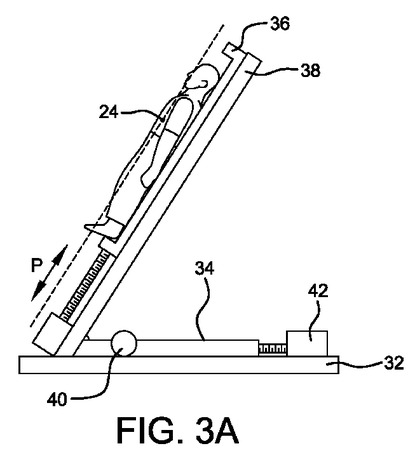
【図3A】第1治療位置にある患者を示す、図1のシステムの実施形態の側面図である。
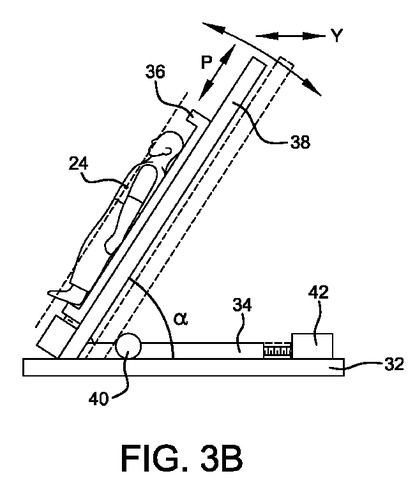
【図3B】第2治療位置にある患者を示す、図1のシステムの実施形態の側面図である。
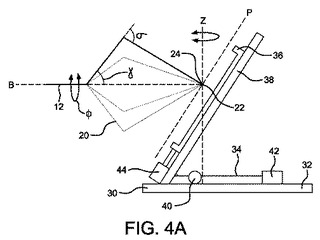
【図4A】ビームに対する患者台を示しており、および、治療周期の間のビームの動きを示す一方で台の回転を示していない、図1のシステムの実施形態の側面図である。
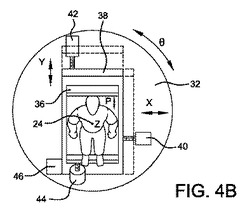
【図4B】図4Aの患者台の実施形態の平面図である。
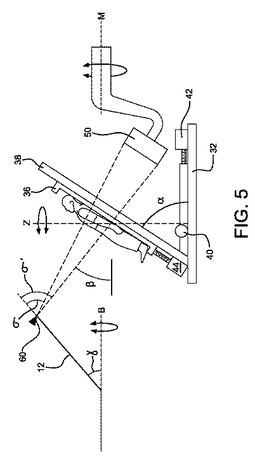
【図5】本発明のシステムの別の実施形態の側面図である。
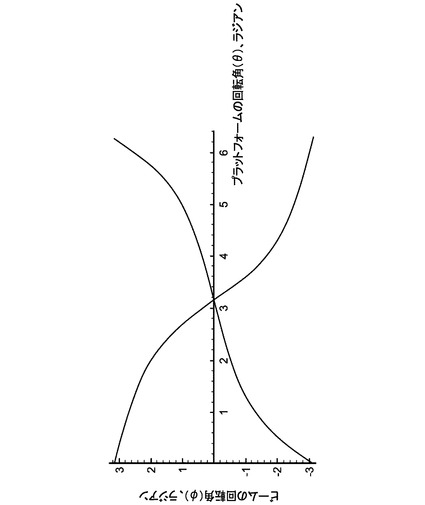
【図6】ビームおよびプラットフォームの各々の回転角を示しており、各関数の線は、異なる回転方向を示すグラフである。
【発明を実施するための形態】
【0005】
図1は、本発明のシステム10の実施形態の代表例を示す。ビーム12はビーム発生器14により発生させられ、ビーム発生器14はサイクロトロンまたは同様の装置であってよい。ビームは、光ビームおよび粒子線を含む任意のタイプのビームであってよいが、本明細書で使用する「ビーム」または「粒子線」は、任意の適切なタイプのビームを説明することが意図されている。ビームは、経路誘導装置18により経路16に沿って方向付けられ、経路誘導装置18は粒子線用の磁石であることが好ましいが、所与のタイプのビームの経路を偏向させることに適した任意の装置であってよい。図2A〜図2Dに示すように、経路16は第1角度γおよび第2角度σで屈曲させられる。第1角度γおよび第2角度σが特定の治療周期に対して一定のままである一方で、図1および図4Aに示すように、ビーム経路は、第1角度γの偏向より前でビーム12の経路と同軸の軸線B回りの回転において変動する。角度γおよびσは、所望のシステムジオメトリを提供する任意の角度であり得る。ビーム経路の回転により、固定されたアイソセンタ22をその頂点に有する円錐20であって、軸線Bに沿って位置する円錐20が形成される。回転は時計回り方向または反時計回り方向のいずれかで発生してよい。ビーム経路が変化する一方で、ビームは、これに限定されないものの患者の体内の腫瘍の部位を含む体26の内部または体26上に位置する標的部位24に位置決めされたアイソセンタを連続的に通過する。システムが、体上の標的部位の全体に任意のタイプのビームを向けるために使用され得る一方で、本明細書では、人の患者の腫瘍の治療に関連してシステムを概して説明する。
【0006】
ビーム経路16が軸線B回りに回転すると(図1に示す)、患者アセンブリ30は、図2A、図2B、図4Aおよび図4Bに見られるように、垂直軸線Z回りに同時に回転する。アセンブリ30は、回転プラットフォーム32および患者受け台34を有している。受け台は、フレーム38に取り付けられた患者トレイ36を有している。フレームおよびトレイは、複数の自由度で移動可能であり、患者アセンブリ30の回転時に患者の内部の標的がアイソセンタ22に留まるようにするために、あらゆる所望の方向にトレイの位置を調節するように位置決めされたモータ40〜46により動かされる。図4Aおよび図4Bに示す実施形態では、モータ40は方向Xにフレーム38を動かし、モータ42は、方向Xに垂直な方向Yにフレーム38を動かし、および、モータ44は軸線Pに沿ってトレイ36を動かす。モータ46によれば、図3Bに示すように、例えば患者受け台またはトレイの撓みを補償する必要がある場合、または、ビームが患者の体に進入する角度を調節する必要がある場合に、角度αを調節することが可能である。これらの自由度によれば、プラットフォームの回転軸線Zが、標的部位24に位置する腫瘍を通過するように、患者を位置決めすることが可能である。
【0007】
軸線Z回りのアセンブリ30の回転は、時計回り方向または反時計回り方向のいずれかであってよく、軸線B回りのビーム経路16の回転に対応する。図2A〜図2Dに示すように、各回転は、水平姿勢の患者の場合に、大径のガントリ構造を使用することなく、ビーム12が常に患者の体に対しておよそ直角に患者26に接触するように同期させられる。当業者であれば理解するように、アセンブリおよびビーム経路の各々の回転速度は一定である必要はない。同様に、当業者であれば、アセンブリの回転速度とビームの回転速度との間の関係がそれぞれ線形である必要がないことがわかるであろう。回転速度同士の関係の一実施形態は図6に示されており、各関数の線はビーム経路の回転の様々な方向を示している。
【0008】
図2A〜2Dは、治療周期中にビーム12が患者の体にどのようにして何度も接触するかを示している。図2Aは、周期の第1点での構成の側面図である。患者はアセンブリ30のトレイ36上に位置する。ビーム12は、第1角度γおよび第2角度σをそれぞれ介して方向付けられて、標的部位24に位置する腫瘍に接触する。説明するように、患者の位置は、空間内の一定の位置に標的部位を維持して治療周期を通してビームが当該部位に接触したまま維持するために変動させられ得る。図2Bは、周期中の第2点の側面図である。図2Aおよび図2Bに示すように、ビームは軸線Pからほぼ90度で標的部位24に接触する。図2Cは、図2Aおよび図2Bと同一の空間内の位置から見えるような治療周期中の第3点の図である。アセンブリ30は、軸線Z回りに90度回転し、軸線Zは、標的部位24に位置する腫瘍のほぼ中心を貫通する。アセンブリは、標的部位の中心を通過する軸線回りに回転することが好ましいため、標的部位の空間的な方向付けは一定であることが好ましい。すなわち、部位は、横方向に移動せずに定位置で単に回転するだけである。図2A〜図2Cからわかるように、回転速度は非線形に同期されるので、ビームは軸線Pからおよそ90度の角度で標的部位に接触したままである。図2Bからわかるように、アセンブリ30は、図2Aに示す方向から180度回転している。ビーム12もまた、対応する分だけ回転し、軸線Pからほぼ90度で標的部位24に接触したままである。図2A〜図2Dからわかるように、ビームアイソセンタ22は、治療周期を通して標的部位24に位置合わせされたままである。
【0009】
治療のために適切に患者を位置決めし、ビームアイソセンタが標的部位に固定されたままであることを確実にするために、アセンブリ30は高度に調節可能であるべきである。図3A、図3B、および図4Bからわかるように、受け台34、フレーム38、およびトレイ36のすべてが位置を調節可能である。アセンブリ30は、標的部位のほぼ中心を垂直に通過する軸線Z回りに回転するプラットフォーム32を有している。これの実現にあたって、体内の標的部位の位置を補償するために、方向XおよびYにフレーム38を調節することが可能であるとともに軸線Pに沿ってトレイ36を調節することが可能である。
【0010】
使用される回転機構によるものの、回転プラットフォーム32はその中心軸線回りに回転することが好ましい。モータ40は、X方向にフレーム38を位置決めするために使用される。モータ42は、Y方向にフレームを位置決めするために使用される。モータ44は、軸線Pに沿ってトレイ36を位置決めするために使用され、および、モータ46は、トレイの角度αを設定するために使用される。トレイは、患者が快適である任意の所望の角度αに設定され得るが、角度αは、ビームが所望の角度で患者の体に進入するように、選択された角度γおよびσに対応する角度に維持されることが好ましい。ビームはおよそ90度の角度で患者の体に進入することが好ましいが、介在する健全な組織への潜在的な損傷を最小限にするように任意の好適な角度が選択され得る。角度αは、図5に示すように、概してほぼ30度〜60度の間に設定される。角度αの調整能力は、患者の寸法または体重の範囲の影響による受け台34またはフレーム38の撓みを補償するためにも使用される。フレームは、患者の体重を支えるのに十分に頑丈であり、金属またはプラスチックを含む任意の適切な材料から形成されてよい。フレームはその下端で支えられるように示されているが、フレームおよび受け台34は、ビーム経路16に干渉しない任意の形状または材料であり得る。
【0011】
アセンブリの回転軸線に沿って標的部位を位置決めすることができない場合、ビーム経路は標的部位の全範囲を確保するように調節され得る。当業者であれば理解するように、粒子または他の粒子が辿る経路は、その中心がビームの名目上のアイソセンタにある拡大した腫瘍の全体積を正確に範囲に含めるために、2つの方法のいずれかまたは両方で変更されてよい。一方の変更は、コンピュータ制御の可変厚の「くさび(ウェッジ)」を導入することであり、その効果は、ビームがそのエネルギーを付与する深さをわずかに変えることであり、従って、照射される各角度で腫瘍の手前側から向こう側まで到達する。他方の変更は、左右にまたはラスタパターンでビームを僅かに移動させて(おそらく不規則な)腫瘍の幅を範囲に含めるために、追加の小さな磁場または他の偏向方法を利用することである。これらの調節は、放射の各角度で腫瘍の全体積の3次元スキャンを実行するために十分に迅速に生じ得る。
【0012】
図5は、例えばCTスキャン等の患者の体のスキャンを実行するために本発明が使用される本発明の代替の実施形態を示す。この実施形態では、ビームは、スキャンを実行するために必要な任意のタイプのビームであってよい。検出装置50は装置内に含まれ得る。360度スキャンが必要な場合、検出装置50は、ビーム12との位置合わせを維持するために軸線M回りに回転することができ、このビーム12は、細い「ペンシルビーム」または図5に示すような円錐形状を形成するビームであってよい。ビームは、粒子線であってよく、または、粒子線の経路に沿って含まれる装置により発生させられた例えばx線等の別のタイプのビームであってよい。検出器は、発生したビームの検出に適した任意のタイプであってよい。ビームおよび患者は、治療時に使用されることが見込まれる方法と同じ方法で回転することが好ましいが、要求される画像のタイプに応じて、患者は回転してもしなくてもよい。さらに、スキャンが線形スキャン、すなわち、患者の体の身長に沿ったスキャンの場合、アセンブリは静止したままであってよく、フレームまたはトレイは、スキャンされるべき領域のビームによる適切な範囲を確保するように動かされてよい。代替として、角度γ、σまたはβのいずれかまたは全ては、ビームが患者の体に接触する位置を変えるように変更され、また、検出器は対応の方法で移動してよい。同様に、スキャンは、同じ方法または装置を用いて、3Dスキャンを必要とするあらゆる対象について行われ得る。
【0013】
図6は、体の正確な外周をビームに横断させることが必要とされる際に、その水平軸線回りのビームの円錐回転と垂直軸線回りの患者の回転との関係のグラフの代表例を示す。任意選択的に、図6に示す角度からの意図的な制御された変更は、変動する幅の帯へ入射点を拡大することができ、更に、介在する組織への放射線量を低減させる一方で、標的の腫瘍に焦点を合わせたままにすることができる。例えば、図2Aの位置では、患者はビームの方に向くとともに後ろに傾けられており(θ=±180°または±πラジアンとして規定される)、ビームは最も高い位置にある(φ=0°または0ラジアンとして規定される)。ビームは正面で患者の体と交差する。図2Bの位置では、患者はビームから見て外方を向き(θ=0°もしくは360°、または0もしくは2πラジアンとして規定される)、ビームは最も低い位置にある(φ=±180°または2πラジアンとして規定される)。ビームは背面で患者の体と交差する。中間の場合は、2つのビームの位置が可能であるため、複雑になる。これを明確にするために、図2Aの位置から観測者に向かって(上から見て)患者の反時計回りの小さな回転を検討する。体の外周には円錐20と交差する2つの点があり、一方は観測者に近い点に対応しており、他方は観測者から離れた点に対応する。前者は(患者からみて)円錐の周りのビームの反時計回りの回転を伴い、他方は時計回りの回転を伴う。例えば、図2Cおよび図2Dのように、患者の角度θ=90°またはπ/2ラジアンで患者がビームに直角に向いている場合、ビームは水平面のやや上方またはやや下方になければならない。要するに、2つの角度間の関係は図6に示すように非線形である。選択された角度が360°または2πラジアンの回転に一致する限り、湾曲した経路のどちらか一方が辿られる。
【0014】
刊行物、特許出願、および特許を含む、本明細書内で引用する全ての参考文献は、各参考文献が個々にかつ明確に参照により援用されることが示されるとともにその全体が本明細書内で記載されているのと同程度まで、参照により援用される。
【0015】
本明細書において別記されない限りまたは文脈に明らかに矛盾しない限り、本発明を説明することに関連して(特に以下の特許請求の範囲に関連して)、「a」および「an」および「the」ならびに同様の指示対象の使用は、単数および複数の両方を包含するものと解釈されるべきである。本明細書における数値範囲の記載は、本明細書において別記されない限り、当該範囲内にある個別の数値を個々に指す簡略化した方法としてのみ意図され、個別の数値それぞれが、本明細書中に個々に記載されているものとして本明細書に組み込まれる。本明細書中に記載したすべての方法は、本明細書において別記されない限り、または文脈に明らかに矛盾しない限り、任意の適切な順序で実行することが可能である。本明細書において提供される任意およびすべての例または例示的な言葉(例えば「等」)の使用は、単に本発明をよりよく明らかにすることが意図され、別に特許請求されない限り、本発明の範囲に対して制限を課さない。本明細書内の用語は、特許請求されないあらゆる要素を本発明の実施に必須であるとして示さないものと解釈されるべきである。
【0016】
本発明を実施するための本発明者の知る最良の形態を含む本発明の好適な実施形態が本明細書で説明されている。説明した実施形態は単なる例示であり、本発明の範囲を制限するものとして解釈されるべきではないことを理解されたい。
【背景技術】
【0001】
癌細胞を攻撃および破壊するために、これらに限定されないものの、陽子、重イオン(例えば炭素等)、および中間子を含む粒子の方向付けられたビームを使用することが知られている。粒子治療は、患者の体内の特定の深さに粒子線を向けることができる点において、従来の放射線治療よりも優れている。その理由は、x線ビームと異なり、粒子線が、当該粒子線が通過する組織内にほとんどエネルギーを付与せず、当該粒子線の端点に大量のエネルギーを付与するので、介在する組織に対して最小の損傷で癌細胞を殺すことができるからである。例えば最大360度の円弧に亘って様々に異なる方向から腫瘍にビームが到達するように構成することによって、腫瘍の周辺組織への放射線量は更に低減される。従来の粒子治療は、粒子加速器またはサイクロトロン内に高速移動の粒子のビームを生成することを含む。そして、ビームは所望の経路に沿って患者に向けられる。ビームは標的部位の全周に伝達されなければならないので、現在のシステムは、患者の周りを回転するガントリから患者にビームを向けている。
【0002】
従来の粒子治療装置では、患者を水平姿勢に配置して、大型のガントリアセンブリ内に配置された磁石を使用して周囲360度の位置から患者にビームを向けている。粒子線発生器、全体で180度近くまでビームを偏向させることが必要とされる磁石、およびガントリのサイズのため、この構成は、膨大なコストのかかる深い掘削を必要とする。現在のシステムは、4メートル以上の直径で90トンを超える重量のガントリを組み込んでいる。更に、ビームの方向を変化させることは、治療領域の全周周りに広範囲の放射能遮蔽物を必要とする。
【発明の概要】
【0003】
従って、より小型で簡易な構造を要する粒子治療装置および方法が必要とされている。
【図面の簡単な説明】
【0004】
【図1】治療周期の間のビームの回転を示す一方で患者の回転を示していない、本発明のシステムの実施形態の等角図である。
【図2A】治療周期中のある一点におけるビームおよび患者の位置を示す、図1のシステムの実施形態の側面図である。
【図2B】周期中の第2点におけるビームおよび患者の位置を示す、図1のシステムの実施形態の第2の側面図である。
【図2C】周期中の第3点におけるビームおよび患者の位置を示す、図1のシステムの実施形態の平面図である。
【図2D】図2Cに示す周期中の一点におけるビームおよび患者の位置の正面図である。
【図3A】第1治療位置にある患者を示す、図1のシステムの実施形態の側面図である。
【図3B】第2治療位置にある患者を示す、図1のシステムの実施形態の側面図である。
【図4A】ビームに対する患者台を示しており、および、治療周期の間のビームの動きを示す一方で台の回転を示していない、図1のシステムの実施形態の側面図である。
【図4B】図4Aの患者台の実施形態の平面図である。
【図5】本発明のシステムの別の実施形態の側面図である。
【図6】ビームおよびプラットフォームの各々の回転角を示しており、各関数の線は、異なる回転方向を示すグラフである。
【発明を実施するための形態】
【0005】
図1は、本発明のシステム10の実施形態の代表例を示す。ビーム12はビーム発生器14により発生させられ、ビーム発生器14はサイクロトロンまたは同様の装置であってよい。ビームは、光ビームおよび粒子線を含む任意のタイプのビームであってよいが、本明細書で使用する「ビーム」または「粒子線」は、任意の適切なタイプのビームを説明することが意図されている。ビームは、経路誘導装置18により経路16に沿って方向付けられ、経路誘導装置18は粒子線用の磁石であることが好ましいが、所与のタイプのビームの経路を偏向させることに適した任意の装置であってよい。図2A〜図2Dに示すように、経路16は第1角度γおよび第2角度σで屈曲させられる。第1角度γおよび第2角度σが特定の治療周期に対して一定のままである一方で、図1および図4Aに示すように、ビーム経路は、第1角度γの偏向より前でビーム12の経路と同軸の軸線B回りの回転において変動する。角度γおよびσは、所望のシステムジオメトリを提供する任意の角度であり得る。ビーム経路の回転により、固定されたアイソセンタ22をその頂点に有する円錐20であって、軸線Bに沿って位置する円錐20が形成される。回転は時計回り方向または反時計回り方向のいずれかで発生してよい。ビーム経路が変化する一方で、ビームは、これに限定されないものの患者の体内の腫瘍の部位を含む体26の内部または体26上に位置する標的部位24に位置決めされたアイソセンタを連続的に通過する。システムが、体上の標的部位の全体に任意のタイプのビームを向けるために使用され得る一方で、本明細書では、人の患者の腫瘍の治療に関連してシステムを概して説明する。
【0006】
ビーム経路16が軸線B回りに回転すると(図1に示す)、患者アセンブリ30は、図2A、図2B、図4Aおよび図4Bに見られるように、垂直軸線Z回りに同時に回転する。アセンブリ30は、回転プラットフォーム32および患者受け台34を有している。受け台は、フレーム38に取り付けられた患者トレイ36を有している。フレームおよびトレイは、複数の自由度で移動可能であり、患者アセンブリ30の回転時に患者の内部の標的がアイソセンタ22に留まるようにするために、あらゆる所望の方向にトレイの位置を調節するように位置決めされたモータ40〜46により動かされる。図4Aおよび図4Bに示す実施形態では、モータ40は方向Xにフレーム38を動かし、モータ42は、方向Xに垂直な方向Yにフレーム38を動かし、および、モータ44は軸線Pに沿ってトレイ36を動かす。モータ46によれば、図3Bに示すように、例えば患者受け台またはトレイの撓みを補償する必要がある場合、または、ビームが患者の体に進入する角度を調節する必要がある場合に、角度αを調節することが可能である。これらの自由度によれば、プラットフォームの回転軸線Zが、標的部位24に位置する腫瘍を通過するように、患者を位置決めすることが可能である。
【0007】
軸線Z回りのアセンブリ30の回転は、時計回り方向または反時計回り方向のいずれかであってよく、軸線B回りのビーム経路16の回転に対応する。図2A〜図2Dに示すように、各回転は、水平姿勢の患者の場合に、大径のガントリ構造を使用することなく、ビーム12が常に患者の体に対しておよそ直角に患者26に接触するように同期させられる。当業者であれば理解するように、アセンブリおよびビーム経路の各々の回転速度は一定である必要はない。同様に、当業者であれば、アセンブリの回転速度とビームの回転速度との間の関係がそれぞれ線形である必要がないことがわかるであろう。回転速度同士の関係の一実施形態は図6に示されており、各関数の線はビーム経路の回転の様々な方向を示している。
【0008】
図2A〜2Dは、治療周期中にビーム12が患者の体にどのようにして何度も接触するかを示している。図2Aは、周期の第1点での構成の側面図である。患者はアセンブリ30のトレイ36上に位置する。ビーム12は、第1角度γおよび第2角度σをそれぞれ介して方向付けられて、標的部位24に位置する腫瘍に接触する。説明するように、患者の位置は、空間内の一定の位置に標的部位を維持して治療周期を通してビームが当該部位に接触したまま維持するために変動させられ得る。図2Bは、周期中の第2点の側面図である。図2Aおよび図2Bに示すように、ビームは軸線Pからほぼ90度で標的部位24に接触する。図2Cは、図2Aおよび図2Bと同一の空間内の位置から見えるような治療周期中の第3点の図である。アセンブリ30は、軸線Z回りに90度回転し、軸線Zは、標的部位24に位置する腫瘍のほぼ中心を貫通する。アセンブリは、標的部位の中心を通過する軸線回りに回転することが好ましいため、標的部位の空間的な方向付けは一定であることが好ましい。すなわち、部位は、横方向に移動せずに定位置で単に回転するだけである。図2A〜図2Cからわかるように、回転速度は非線形に同期されるので、ビームは軸線Pからおよそ90度の角度で標的部位に接触したままである。図2Bからわかるように、アセンブリ30は、図2Aに示す方向から180度回転している。ビーム12もまた、対応する分だけ回転し、軸線Pからほぼ90度で標的部位24に接触したままである。図2A〜図2Dからわかるように、ビームアイソセンタ22は、治療周期を通して標的部位24に位置合わせされたままである。
【0009】
治療のために適切に患者を位置決めし、ビームアイソセンタが標的部位に固定されたままであることを確実にするために、アセンブリ30は高度に調節可能であるべきである。図3A、図3B、および図4Bからわかるように、受け台34、フレーム38、およびトレイ36のすべてが位置を調節可能である。アセンブリ30は、標的部位のほぼ中心を垂直に通過する軸線Z回りに回転するプラットフォーム32を有している。これの実現にあたって、体内の標的部位の位置を補償するために、方向XおよびYにフレーム38を調節することが可能であるとともに軸線Pに沿ってトレイ36を調節することが可能である。
【0010】
使用される回転機構によるものの、回転プラットフォーム32はその中心軸線回りに回転することが好ましい。モータ40は、X方向にフレーム38を位置決めするために使用される。モータ42は、Y方向にフレームを位置決めするために使用される。モータ44は、軸線Pに沿ってトレイ36を位置決めするために使用され、および、モータ46は、トレイの角度αを設定するために使用される。トレイは、患者が快適である任意の所望の角度αに設定され得るが、角度αは、ビームが所望の角度で患者の体に進入するように、選択された角度γおよびσに対応する角度に維持されることが好ましい。ビームはおよそ90度の角度で患者の体に進入することが好ましいが、介在する健全な組織への潜在的な損傷を最小限にするように任意の好適な角度が選択され得る。角度αは、図5に示すように、概してほぼ30度〜60度の間に設定される。角度αの調整能力は、患者の寸法または体重の範囲の影響による受け台34またはフレーム38の撓みを補償するためにも使用される。フレームは、患者の体重を支えるのに十分に頑丈であり、金属またはプラスチックを含む任意の適切な材料から形成されてよい。フレームはその下端で支えられるように示されているが、フレームおよび受け台34は、ビーム経路16に干渉しない任意の形状または材料であり得る。
【0011】
アセンブリの回転軸線に沿って標的部位を位置決めすることができない場合、ビーム経路は標的部位の全範囲を確保するように調節され得る。当業者であれば理解するように、粒子または他の粒子が辿る経路は、その中心がビームの名目上のアイソセンタにある拡大した腫瘍の全体積を正確に範囲に含めるために、2つの方法のいずれかまたは両方で変更されてよい。一方の変更は、コンピュータ制御の可変厚の「くさび(ウェッジ)」を導入することであり、その効果は、ビームがそのエネルギーを付与する深さをわずかに変えることであり、従って、照射される各角度で腫瘍の手前側から向こう側まで到達する。他方の変更は、左右にまたはラスタパターンでビームを僅かに移動させて(おそらく不規則な)腫瘍の幅を範囲に含めるために、追加の小さな磁場または他の偏向方法を利用することである。これらの調節は、放射の各角度で腫瘍の全体積の3次元スキャンを実行するために十分に迅速に生じ得る。
【0012】
図5は、例えばCTスキャン等の患者の体のスキャンを実行するために本発明が使用される本発明の代替の実施形態を示す。この実施形態では、ビームは、スキャンを実行するために必要な任意のタイプのビームであってよい。検出装置50は装置内に含まれ得る。360度スキャンが必要な場合、検出装置50は、ビーム12との位置合わせを維持するために軸線M回りに回転することができ、このビーム12は、細い「ペンシルビーム」または図5に示すような円錐形状を形成するビームであってよい。ビームは、粒子線であってよく、または、粒子線の経路に沿って含まれる装置により発生させられた例えばx線等の別のタイプのビームであってよい。検出器は、発生したビームの検出に適した任意のタイプであってよい。ビームおよび患者は、治療時に使用されることが見込まれる方法と同じ方法で回転することが好ましいが、要求される画像のタイプに応じて、患者は回転してもしなくてもよい。さらに、スキャンが線形スキャン、すなわち、患者の体の身長に沿ったスキャンの場合、アセンブリは静止したままであってよく、フレームまたはトレイは、スキャンされるべき領域のビームによる適切な範囲を確保するように動かされてよい。代替として、角度γ、σまたはβのいずれかまたは全ては、ビームが患者の体に接触する位置を変えるように変更され、また、検出器は対応の方法で移動してよい。同様に、スキャンは、同じ方法または装置を用いて、3Dスキャンを必要とするあらゆる対象について行われ得る。
【0013】
図6は、体の正確な外周をビームに横断させることが必要とされる際に、その水平軸線回りのビームの円錐回転と垂直軸線回りの患者の回転との関係のグラフの代表例を示す。任意選択的に、図6に示す角度からの意図的な制御された変更は、変動する幅の帯へ入射点を拡大することができ、更に、介在する組織への放射線量を低減させる一方で、標的の腫瘍に焦点を合わせたままにすることができる。例えば、図2Aの位置では、患者はビームの方に向くとともに後ろに傾けられており(θ=±180°または±πラジアンとして規定される)、ビームは最も高い位置にある(φ=0°または0ラジアンとして規定される)。ビームは正面で患者の体と交差する。図2Bの位置では、患者はビームから見て外方を向き(θ=0°もしくは360°、または0もしくは2πラジアンとして規定される)、ビームは最も低い位置にある(φ=±180°または2πラジアンとして規定される)。ビームは背面で患者の体と交差する。中間の場合は、2つのビームの位置が可能であるため、複雑になる。これを明確にするために、図2Aの位置から観測者に向かって(上から見て)患者の反時計回りの小さな回転を検討する。体の外周には円錐20と交差する2つの点があり、一方は観測者に近い点に対応しており、他方は観測者から離れた点に対応する。前者は(患者からみて)円錐の周りのビームの反時計回りの回転を伴い、他方は時計回りの回転を伴う。例えば、図2Cおよび図2Dのように、患者の角度θ=90°またはπ/2ラジアンで患者がビームに直角に向いている場合、ビームは水平面のやや上方またはやや下方になければならない。要するに、2つの角度間の関係は図6に示すように非線形である。選択された角度が360°または2πラジアンの回転に一致する限り、湾曲した経路のどちらか一方が辿られる。
【0014】
刊行物、特許出願、および特許を含む、本明細書内で引用する全ての参考文献は、各参考文献が個々にかつ明確に参照により援用されることが示されるとともにその全体が本明細書内で記載されているのと同程度まで、参照により援用される。
【0015】
本明細書において別記されない限りまたは文脈に明らかに矛盾しない限り、本発明を説明することに関連して(特に以下の特許請求の範囲に関連して)、「a」および「an」および「the」ならびに同様の指示対象の使用は、単数および複数の両方を包含するものと解釈されるべきである。本明細書における数値範囲の記載は、本明細書において別記されない限り、当該範囲内にある個別の数値を個々に指す簡略化した方法としてのみ意図され、個別の数値それぞれが、本明細書中に個々に記載されているものとして本明細書に組み込まれる。本明細書中に記載したすべての方法は、本明細書において別記されない限り、または文脈に明らかに矛盾しない限り、任意の適切な順序で実行することが可能である。本明細書において提供される任意およびすべての例または例示的な言葉(例えば「等」)の使用は、単に本発明をよりよく明らかにすることが意図され、別に特許請求されない限り、本発明の範囲に対して制限を課さない。本明細書内の用語は、特許請求されないあらゆる要素を本発明の実施に必須であるとして示さないものと解釈されるべきである。
【0016】
本発明を実施するための本発明者の知る最良の形態を含む本発明の好適な実施形態が本明細書で説明されている。説明した実施形態は単なる例示であり、本発明の範囲を制限するものとして解釈されるべきではないことを理解されたい。
【特許請求の範囲】
【請求項1】
3次元の標的部位をビームで囲むための装置であって、
ビーム発生装置と、
可変の経路に沿って前記ビームを所望のアイソセンタに向けるように構成された複数の経路誘導装置であって、前記ビームの経路は、前記アイソセンタを頂点に有する円錐を形成するように水平軸線回りに回転し、前記アイソセンタは標的部位に対して固定されたままである、複数の経路誘導装置と、
前記標的部位を包含する体を固定することに適した保持装置であって、前記体は、水平と垂直との間の角度で延在する体軸線に沿って縦方向に方向付けられ、当該装置は、前記標的部位のほぼ中心を通過する垂直軸線回りに前記体を回転させる、保持装置と、
を備える装置。
【請求項2】
前記ビームは粒子線である、請求項1に記載の装置。
【請求項3】
前記経路誘導装置は磁石を含む、請求項1に記載の装置。
【請求項4】
前記ビーム発生装置はサイクロトロンである、請求項1に記載の装置。
【請求項5】
前記経路は少なくとも2つの角度を含む、請求項1に記載の装置。
【請求項6】
前記ビームの回転は、前記ビームが前記体軸線に対してほぼ直角に前記標的部位に接触するように前記装置の回転に対応する、請求項1に記載の装置。
【請求項7】
前記保持装置は、
回転可能なプラットフォームと、
前記プラットフォームに取り付けられたフレームと、
前記体を固定することに適したトレイと、
を更に備える、請求項1に記載の装置。
【請求項8】
前記フレームは前記プラットフォームに移動可能に取り付けられている、請求項7に記載の装置。
【請求項9】
前記トレイは前記フレームに移動可能に取り付けられている、請求項7に記載の装置。
【請求項10】
前記ビームの回転は、前記ビームが前記体軸線に対して直角以外の角度で前記標的部位に接触するように前記装置の回転に対応する、請求項1に記載の装置。
【請求項11】
3次元の標的部位をビームで囲むための方法であって、
ビームを発生させる工程と、
前記ビームが既定の点を通過するように、経路に沿って前記ビームを方向付ける工程であって、前記経路は少なくとも第1角度および第2角度を含む、工程と、
前記既定の点がアイソセンタにある円錐を形成するために前記経路が軸線回りに回転するように前記ビームが通過する前記角度を変動させる工程と、
標的領域が前記アイソセンタに位置するように体を位置決めする工程であって、前記体は、垂直から0度と90度との間の角度を有する軸線に沿って方向付けられる、工程と、
前記標的領域が空間内に実質的に静止したままになるように、垂直軸線回りに前記体を回転させる工程と、
前記ビームが前記体軸線にほぼ直角な平面の前記標的領域に接触するように、前記回転の速度を調整する工程と、
を備える方法。
【請求項12】
粒子線治療を患者に施す装置であって、
粒子線発生装置と、
可変の経路に沿って前記線を所望のアイソセンタに向けるように構成された複数の磁石であって、前記線の経路は、前記アイソセンタを頂点に有する円錐を形成するように回転し、前記アイソセンタは名目上、腫瘍部位に対して固定されたままである、複数の磁石と、
水平と垂直との間の角度で前記患者を固定することに適した保持装置であって、当該装置は、前記腫瘍部位のほぼ中心を通過する垂直軸線回りに前記体を回転させる、保持装置と、を備えており、当該保持装置は、
回転可能なプラットフォームと、
前記プラットフォームに移動可能に取り付けられたフレームと、
前記フレームに移動可能に取り付けられ、前記体を固定することに適したトレイと、を有しており、
前記線が、前記患者の体の長さに沿って延在する軸線にほぼ直角に、かつ、前記腫瘍部位のほぼ中心を通過して前記標的部位に交差するように、前記線の前記回転速度が当該装置の前記回転速度に対応し、前記軸線は、前記線が前記患者の体の表面から前記腫瘍部位の中心まで可能な最短経路を通過するように位置合わせされる、装置。
【請求項13】
前記患者は垂直からほぼ30度と60度との間の角度に方向付けられる、請求項12に記載の装置。
【請求項14】
体のスキャンを行う装置であって、
ビーム発生装置と、
可変の経路に沿って前記ビームを所望のアイソセンタに向けるように構成された複数の経路誘導装置であって、前記ビームの経路は、前記アイソセンタを頂点に有する円錐を形成するように、水平軸線回りに回転し、前記アイソセンタは標的部位に対して固定されたままである、複数の経路誘導装置と、
前記標的部位を包含する体を固定することに適した保持装置であって、前記体は水平と垂直との間の角度に方向付けられ、当該装置は、前記標的部位のほぼ中心を通過する垂直軸線回りに前記体を回転させる、保持装置と、
前記体の反対側にある検出器であって、前記ビームの前記回転の軸線と同軸上にある軸線回りに回転し、前記検出器の前記回転は、前記ビームが前記標的部位を通過した後に前記検出器が前記ビームを遮断するように、前記ビームの回転と連動させられる、検出器と、
を備える装置。
【請求項15】
3次元画像を作成するように、前記ビームの経路に沿って位置するx線源を更に備える、請求項14に記載の装置。
【請求項16】
3次元画像を作成する方法であって、前記方法は、
円錐の形状のビームを発生させる工程と、
標的領域が前記円錐の範囲内に位置するように、前記標的領域を有する体を位置決めする工程であって、前記体は垂直から0度と90度との間の角度を有する体軸線に沿って方向付けられる、工程と、
前記標的領域が空間内に実質的に静止したままになるように、前記標的領域を通過する垂直軸線回りに前記体を回転させる工程と、
前記ビームの源を軸線回りに回転させる工程と、
前記ビームを検出するように検出器を回転させる工程であって、前記標的部位は前記ビームの源と前記検出器との間に位置する、工程と、
前記ビームから前記検出器までの前記経路が前記体軸線周りの平面の前記標的領域を囲むように、前記ビーム、前記体、および前記検出器の回転速度を連動させる工程と、
前記ビームを前記検出器で検出する工程と、
を備える方法。
【請求項1】
3次元の標的部位をビームで囲むための装置であって、
ビーム発生装置と、
可変の経路に沿って前記ビームを所望のアイソセンタに向けるように構成された複数の経路誘導装置であって、前記ビームの経路は、前記アイソセンタを頂点に有する円錐を形成するように水平軸線回りに回転し、前記アイソセンタは標的部位に対して固定されたままである、複数の経路誘導装置と、
前記標的部位を包含する体を固定することに適した保持装置であって、前記体は、水平と垂直との間の角度で延在する体軸線に沿って縦方向に方向付けられ、当該装置は、前記標的部位のほぼ中心を通過する垂直軸線回りに前記体を回転させる、保持装置と、
を備える装置。
【請求項2】
前記ビームは粒子線である、請求項1に記載の装置。
【請求項3】
前記経路誘導装置は磁石を含む、請求項1に記載の装置。
【請求項4】
前記ビーム発生装置はサイクロトロンである、請求項1に記載の装置。
【請求項5】
前記経路は少なくとも2つの角度を含む、請求項1に記載の装置。
【請求項6】
前記ビームの回転は、前記ビームが前記体軸線に対してほぼ直角に前記標的部位に接触するように前記装置の回転に対応する、請求項1に記載の装置。
【請求項7】
前記保持装置は、
回転可能なプラットフォームと、
前記プラットフォームに取り付けられたフレームと、
前記体を固定することに適したトレイと、
を更に備える、請求項1に記載の装置。
【請求項8】
前記フレームは前記プラットフォームに移動可能に取り付けられている、請求項7に記載の装置。
【請求項9】
前記トレイは前記フレームに移動可能に取り付けられている、請求項7に記載の装置。
【請求項10】
前記ビームの回転は、前記ビームが前記体軸線に対して直角以外の角度で前記標的部位に接触するように前記装置の回転に対応する、請求項1に記載の装置。
【請求項11】
3次元の標的部位をビームで囲むための方法であって、
ビームを発生させる工程と、
前記ビームが既定の点を通過するように、経路に沿って前記ビームを方向付ける工程であって、前記経路は少なくとも第1角度および第2角度を含む、工程と、
前記既定の点がアイソセンタにある円錐を形成するために前記経路が軸線回りに回転するように前記ビームが通過する前記角度を変動させる工程と、
標的領域が前記アイソセンタに位置するように体を位置決めする工程であって、前記体は、垂直から0度と90度との間の角度を有する軸線に沿って方向付けられる、工程と、
前記標的領域が空間内に実質的に静止したままになるように、垂直軸線回りに前記体を回転させる工程と、
前記ビームが前記体軸線にほぼ直角な平面の前記標的領域に接触するように、前記回転の速度を調整する工程と、
を備える方法。
【請求項12】
粒子線治療を患者に施す装置であって、
粒子線発生装置と、
可変の経路に沿って前記線を所望のアイソセンタに向けるように構成された複数の磁石であって、前記線の経路は、前記アイソセンタを頂点に有する円錐を形成するように回転し、前記アイソセンタは名目上、腫瘍部位に対して固定されたままである、複数の磁石と、
水平と垂直との間の角度で前記患者を固定することに適した保持装置であって、当該装置は、前記腫瘍部位のほぼ中心を通過する垂直軸線回りに前記体を回転させる、保持装置と、を備えており、当該保持装置は、
回転可能なプラットフォームと、
前記プラットフォームに移動可能に取り付けられたフレームと、
前記フレームに移動可能に取り付けられ、前記体を固定することに適したトレイと、を有しており、
前記線が、前記患者の体の長さに沿って延在する軸線にほぼ直角に、かつ、前記腫瘍部位のほぼ中心を通過して前記標的部位に交差するように、前記線の前記回転速度が当該装置の前記回転速度に対応し、前記軸線は、前記線が前記患者の体の表面から前記腫瘍部位の中心まで可能な最短経路を通過するように位置合わせされる、装置。
【請求項13】
前記患者は垂直からほぼ30度と60度との間の角度に方向付けられる、請求項12に記載の装置。
【請求項14】
体のスキャンを行う装置であって、
ビーム発生装置と、
可変の経路に沿って前記ビームを所望のアイソセンタに向けるように構成された複数の経路誘導装置であって、前記ビームの経路は、前記アイソセンタを頂点に有する円錐を形成するように、水平軸線回りに回転し、前記アイソセンタは標的部位に対して固定されたままである、複数の経路誘導装置と、
前記標的部位を包含する体を固定することに適した保持装置であって、前記体は水平と垂直との間の角度に方向付けられ、当該装置は、前記標的部位のほぼ中心を通過する垂直軸線回りに前記体を回転させる、保持装置と、
前記体の反対側にある検出器であって、前記ビームの前記回転の軸線と同軸上にある軸線回りに回転し、前記検出器の前記回転は、前記ビームが前記標的部位を通過した後に前記検出器が前記ビームを遮断するように、前記ビームの回転と連動させられる、検出器と、
を備える装置。
【請求項15】
3次元画像を作成するように、前記ビームの経路に沿って位置するx線源を更に備える、請求項14に記載の装置。
【請求項16】
3次元画像を作成する方法であって、前記方法は、
円錐の形状のビームを発生させる工程と、
標的領域が前記円錐の範囲内に位置するように、前記標的領域を有する体を位置決めする工程であって、前記体は垂直から0度と90度との間の角度を有する体軸線に沿って方向付けられる、工程と、
前記標的領域が空間内に実質的に静止したままになるように、前記標的領域を通過する垂直軸線回りに前記体を回転させる工程と、
前記ビームの源を軸線回りに回転させる工程と、
前記ビームを検出するように検出器を回転させる工程であって、前記標的部位は前記ビームの源と前記検出器との間に位置する、工程と、
前記ビームから前記検出器までの前記経路が前記体軸線周りの平面の前記標的領域を囲むように、前記ビーム、前記体、および前記検出器の回転速度を連動させる工程と、
前記ビームを前記検出器で検出する工程と、
を備える方法。
【図1】

【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6】
【公表番号】特表2012−518466(P2012−518466A)
【公表日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−551077(P2011−551077)
【出願日】平成22年1月6日(2010.1.6)
【国際出願番号】PCT/US2010/020208
【国際公開番号】WO2010/098894
【国際公開日】平成22年9月2日(2010.9.2)
【出願人】(511205334)
【Fターム(参考)】
【公表日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成22年1月6日(2010.1.6)
【国際出願番号】PCT/US2010/020208
【国際公開番号】WO2010/098894
【国際公開日】平成22年9月2日(2010.9.2)
【出願人】(511205334)
【Fターム(参考)】
[ Back to top ]