
粒子線治療装置
【課題】粒子線の侵入位置や照射方向の自由度を高めつつ、かつ被検体から発生するガンマ線を検出するPET検出部を備えることを課題とする。
【解決手段】粒子線照射部103は、天板100に載置された被検体に向けて粒子線を照射する。すると、PET検出部201は、被検体から発生するガンマ線を検出素子にて検出する。また、天板110およびPET検出部201は、照射に応じて移動する。このため、補正係数算出部300は、減弱マップの原点とPET検出部201の検出素子との相対的な位置関係を示す座標を、天板110およびPET検出部201の移動量を用いて算出し、算出した座標を用いて吸収補正係数を算出する。そして、画像生成部202は、PET検出部201によって検出されたガンマ線と補正係数算出部300によって算出された吸収補正係数とを用いて画像を生成する。
【解決手段】粒子線照射部103は、天板100に載置された被検体に向けて粒子線を照射する。すると、PET検出部201は、被検体から発生するガンマ線を検出素子にて検出する。また、天板110およびPET検出部201は、照射に応じて移動する。このため、補正係数算出部300は、減弱マップの原点とPET検出部201の検出素子との相対的な位置関係を示す座標を、天板110およびPET検出部201の移動量を用いて算出し、算出した座標を用いて吸収補正係数を算出する。そして、画像生成部202は、PET検出部201によって検出されたガンマ線と補正係数算出部300によって算出された吸収補正係数とを用いて画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒子線治療装置に関する。
【背景技術】
【0002】
近年、加速された荷電粒子線(以下「粒子線」)を患部に照射することで癌細胞を破壊する粒子線治療が行われている。粒子は、停止直前に最大のエネルギー(Bragg Peak)を放出する。このため、被検体内でエネルギーが単調減衰するX線治療などに比較すると、粒子線治療では、患部以外の正常組織に対するダメージを抑制することができる。
【0003】
このようなことから、粒子線治療では、治療の観点に加え、ダメージ抑制の観点から、粒子線の侵入位置や照射方向が決定される。例えば、粒子線が被検体の体表から患部に到達するまでの距離が最短となるように決定されたり、重要な臓器に粒子線が照射されないように決定されたりする。また、最近では、粒子線の侵入位置や照射方向の自由度を高めることを目的として、回転ガントリーや回転寝台などを備える粒子線治療装置が登場している。
【0004】
ところで、被検体に照射された粒子線は、被検体内の原子と衝突して陽電子放射核を生成する。また、陽電子放射核から放射された陽電子は、近傍の電子と結合してガンマ線を発生する。このガンマ線を検出することができれば、粒子の停止位置、すなわち粒子が照射された位置を割り出すことができる。このため、最近では、粒子が照射された位置を割り出すことを目的として、PET(Positron Emission computed Tomography)検出部を備える粒子線治療装置が登場した。例えば、PET検出部がガンマ線を検出することで粒子の停止位置を割り出し、割り出した停止位置を画像上に出力する技術が開示されている(特許文献1など)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−189769号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記した従来の技術では、粒子線治療装置がPET検出部を備える結果、粒子線の侵入位置や照射方向の自由度が低くなってしまうという課題があった。すなわち、粒子線治療装置が、粒子線の侵入位置や照射方向の自由度を高めることを目的として回転ガントリーや回転寝台などを備えたとしても、粒子線の侵入位置や照射方向は、固定的に設置されたPET検出部の配置を優先して決定されざるを得ず、結果として、その自由度は低くなってしまう。
【0007】
そこで、本発明は、上記に鑑みてなされたものであって、粒子線の侵入位置や照射方向の自由度を高めつつ、かつ被検体から発生するガンマ線を検出するPET検出部を備えた粒子線治療装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記した課題を解決し、目的を達成するために、請求項1に記載の本発明は、天板に載置された被検体に向けて粒子線を照射する粒子線照射手段と、前記粒子線照射手段によって照射されることで前記被検体から発生するガンマ線を検出素子にて検出するPET検出手段と、前記天板および前記PET検出手段を前記照射に応じて移動させる移動手段と、前記被検体について作成された減弱マップの原点と前記PET検出手段の検出素子との相対的な位置関係を示す位置情報を、前記移動手段によって移動される前記天板および前記PET検出手段の移動量を用いて算出する位置情報算出手段と、前記位置情報算出手段によって算出された位置情報を用いて補正係数を算出する補正係数算出手段と、前記PET検出手段によって検出されたガンマ線と前記補正係数算出手段によって算出された補正係数とを用いて画像を生成する画像生成手段とを備えたことを特徴とする。
【発明の効果】
【0009】
請求項1の本発明によれば、粒子線の侵入位置や照射方向の自由度を高めつつ、かつ被検体から発生するガンマ線を検出するPET検出部を備えることが可能になるという効果を奏する。
【図面の簡単な説明】
【0010】
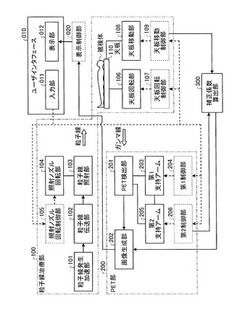
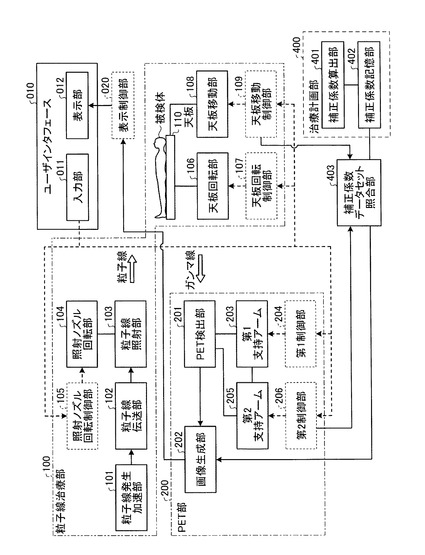
【図1】図1は、実施例1に係る粒子線治療装置の構成を示すブロック図である。
【図2】図2は、粒子線治療装置を回転ガントリーの回転軸方向からみた模式的な正面図および模式的な側面図である。
【図3】図3は、粒子線治療装置の模式的な上面図である。
【図4】図4は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【図5】図5は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【図6】図6は、検出素子を説明するための図である。
【図7】図7は、実施例1に係る粒子線治療装置による処理手順を示すフローチャートである。
【図8】図8は、実施例2に係る粒子線治療装置の構成を示すブロック図である。
【発明を実施するための形態】
【0011】
以下、本発明に係る粒子線治療装置の実施例を図面に基づいて詳細に説明する。なお、以下の実施例により本発明が限定されるものではない。
【実施例1】
【0012】
[実施例1に係る粒子線治療装置の構成]
まず、図1〜図6を用いて、実施例1に係る粒子線治療装置の構成を説明する。図1は、実施例1に係る粒子線治療装置の構成を示すブロック図である。
【0013】
図1に示すように、実施例1に係る粒子線治療装置は、ユーザインタフェース010と、表示制御部020と、粒子線治療部100と、PET部200と、補正係数算出部300とを備える。
【0014】
なお、図1においては、粒子線治療部100が備える各部を明示することを目的として破線を用い、同様に、PET部200が備える各部を明示することを目的として破線を用いている。また、図1においては、制御を行う各部については点線の枠で示した。また、図1においては、ユーザインタフェース010から制御を行う各部に操作内容が伝送される点や、制御を行う各部から各機構に制御内容が伝送される点については点線の矢印で示し、それ以外の情報が伝送される点については実線の矢印で示している。また、矢印ではない実線で接続されている各部は、一方が他方に支持される関係にあるなど、物理的に連動する関係にあることを示す。
【0015】
実施例1に係る粒子線治療装置は、粒子線治療部100を備え、被検体の患部に粒子線を照射することで患部の細胞を破壊する治療を行う。また、実施例1に係る粒子線治療装置は、PET部200を備え、粒子線が照射されている位置を検出する。すなわち、実施例1に係る粒子線治療装置は、PET部200によって検出される粒子線の照射位置に基づき、粒子線治療部100によって粒子線を照射することで、照射対象となる患部(以下「照射対象部位」)に正確に粒子線を照射し、効果的な治療を行う。
【0016】
具体的には、実施例1に係る粒子線治療装置は、粒子線の照射方向を最適な位置に設定するように粒子線照射部103および天板110を移動させる。また、粒子線治療装置は、その粒子線の照射を妨げないように、すなわち、粒子線の照射野を妨げないように、および接触などの機械的な干渉を起こさないように、PET検出部201を移動させる。以下では、粒子線治療部100、PET部200、補正係数算出部300、ユーザインタフェース010、表示制御部020を順に説明する。
【0017】
図1に示すように、粒子線治療部100は、粒子線発生/加速部101と、粒子線伝送部102と、粒子線照射部103(照射ノズル)と、照射ノズル回転部104(回転ガントリー)と、照射ノズル回転制御部105とを備える。
【0018】
粒子線発生/加速部101は、粒子線伝送部102と接続され、イオン源と、直線加速器、サイクロトロン、シンクロトロンなどの加速器(いずれも不図示)とを有する。具体的には、まず、粒子線発生/加速部101は、イオン源で陽イオン(例えば、水素イオン、ヘリウムイオン、炭素イオン、ネオンイオンなど)を発生させる。次に、粒子線発生/加速部101は、発生させた陽イオンを加速器で所定のエネルギーまで加速する。例えば、粒子線発生/加速部101は、発生した陽イオンを直線加速器で加速し、直線加速器から射出された陽イオンをシンクロトロンなどでさらに加速することで、所定のエネルギーまで加速する。そして、粒子線発生/加速部101は、所定のエネルギーまで加速された陽イオンを粒子線伝送部102に射出する。
【0019】
粒子線伝送部102は、粒子線発生/加速部101と粒子線照射部103と接続され、粒子線発生/加速部101から粒子線照射部103へと繋がるビーム経路(不図示)を有する。具体的には、粒子線伝送部102は、粒子線発生/加速部101から射出された陽イオンをビーム経路を経由させて粒子線照射部103へと伝送する。
【0020】
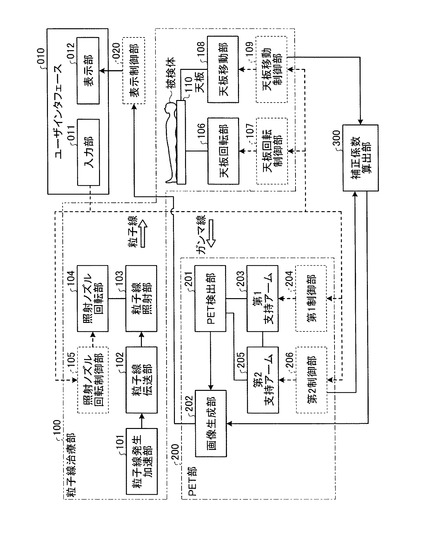
粒子線照射部103は、粒子線伝送部102と接続され、また、図2の(A)に示すように、照射ノズル回転部104の内壁の所定位置に設置されている。図2は、粒子線治療装置を回転ガントリーの回転軸方向からみた模式的な正面図および模式的な側面図である。
【0021】
粒子線照射部103は、照射ノズル回転部104の回転とともに被検体の周りを回転する。また、粒子線照射部103は、粒子線伝送部102から伝送された陽イオンを被検体に向けて照射する。この時、粒子線照射部103は、照射中心(アイソセンター)に向けて粒子線の照射を行う。なお、粒子線照射部103の回転の基準位置を図2の(A)のように位置P1に位置している状態とする。すなわち、被検体を真下に見る位置に粒子線照射部103が位置している状態を粒子線照射部103の角度θ=0の状態とする。
【0022】
照射ノズル回転部104は、照射ノズル回転制御部105と接続され、また、図2の(A)に示すように、粒子線照射部103を設置する。
【0023】
照射ノズル回転部104は、図2の(A)に示すように、側面から見ると中心軸Sを中心に円形をしているガントリーおよび該ガントリーを回転させるモータ(不図示)を有する。ここで、図2の(B)に示すように、図2の(A)の中心軸Sは照射中心を通過する軸で、図2の(A)の紙面正面から裏面に向けて貫通している軸を表している。また、以下の説明では、中心軸Sに直交し照射中心を貫通する平面を平面αとする。照射ノズル回転部104のガントリーは、平面α内を回転移動するため、平面αは固定平面である。
【0024】
そして、照射ノズル回転部104のガントリーは、図2の(B)に示すように、中心軸Sに沿う方向に厚みを有した略筒型の形状を有している。さらに、照射ノズル回転部104のガントリーは、照射ノズル回転制御部105によって制御されることで、中心軸Sを中心に回転を行う。これにより、粒子線照射部103も中心軸Sを中心に回転を行うことになる。
【0025】
実施例1では、図2の(A)における点P1を基準位置として点P1からの粒子線照射部103までの角度を平面αにおける照射角度とする。具体的には、中心軸Sに向けて照射角度θで粒子線を照射する場合には、照射ノズル回転部104のガントリーは、照射角度θ分回転することになる。
【0026】
照射ノズル回転制御部105は、照射ノズル回転部104を制御する。具体的には、照射ノズル回転制御部105は、ユーザインタフェース010の入力部011と照射ノズル回転部104と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき照射ノズル回転部104を制御する。
【0027】
天板110は、床に平行で人が寝られる大きさの板状の形状を有する。天板110の上には、粒子線治療を行う対象である被検体を載置する。被検体が載置されている平面を「載置平面」と呼ぶことにする。天板110は、天板移動部108によって、載置した被検体の体軸方向またはその直交方向に並進移動が行われる。また、天板110は、天板回転部106によって、載置平面内で回転移動が行われる。
【0028】
天板移動部108は、天板移動制御部109と接続され、天板110を被検体の体軸方向またはその直交方向に並進移動させる機構と、該機構を動かすモータとを有する。具体的には、天板移動部108は、天板移動制御部109によって制御されてモータを駆動することで、天板110を被検体の体軸方向またはその直交方向に移動させる。例えば、天板移動部108のモータによりギアなどの回転部材を回転させて、ギアとかみ合う水平移動部材が移動することで、天板110が並進移動する構成になっている。
【0029】
天板移動制御部109は、天板移動部108を制御する。具体的には、天板移動制御部109は、ユーザインタフェース010の入力部011と天板移動部108と補正係数算出部300と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき天板移動部108を制御する。また、天板移動制御部109は、天板移動部108の制御に用いた移動量を補正係数算出部300に通知する。
【0030】
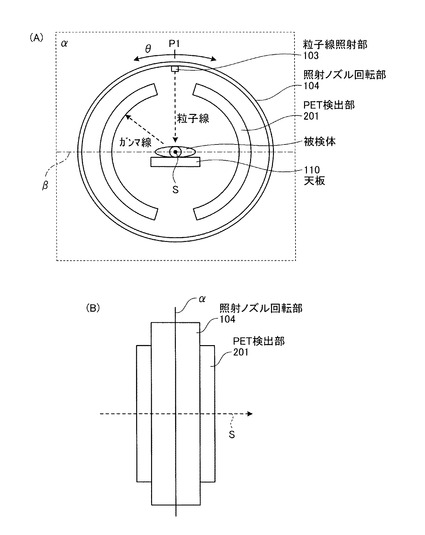
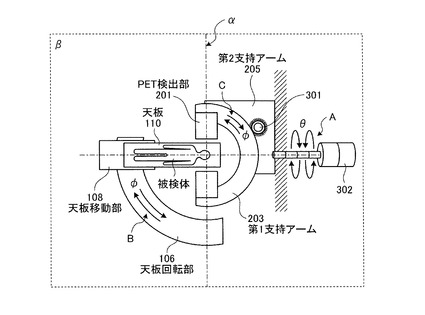
天板回転部106は、天板回転制御部107と接続され、天板移動部108および天板110を天板110と平行な平面内で回転させる円盤と、該円盤を動かすモータとを有する。具体的には、天板回転部106は、天板回転制御部107によって制御されてモータを駆動することで、天板110と平行な平面内で天板110および天板移動部108を照射中心を軸に回転させる。すなわち、天板回転部106は、図3で示す矢印Bのように、天板110および天板移動部108を回転移動させる。天板110と平行な平面でかつ被検体の体軸を含む平面を平面βとする。図3は、粒子線治療装置の模式的な上面図である。
【0031】
天板回転制御部107は、天板回転部106を制御する。具体的には、天板回転制御部107は、ユーザインタフェース010の入力部011と天板回転部106と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき天板回転部106を制御する。
【0032】
PET部200は、図1に示すように、PET検出部201と、画像生成部202と、第1支持アーム203と、第1制御部204と、第2支持アーム205と、第2制御部206とを備える。
【0033】
PET検出部201は、画像生成部202と接続され、被検体から発生するガンマ線を検出素子にて検出し、検出したガンマ線に基づく電気信号を画像生成部202に出力する。具体的には、PET検出部201は、図2の(A)に示すように、照射ノズル回転部104および粒子線照射部103の内側に、天板110および天板110に載置された被検体を囲むように配置される。また、PET検出部201は、図2の(B)に示すように、中心軸Sに沿う方向に厚みを有する。また、PET検出部201は、図2の(A)に示すように、粒子線照射部103と照射中心との間に粒子線を通過させるための第1の開口部、および被検体から見て粒子線照射部103と反対側の部分(第1の開口部と反対側の部分)に第2の開口部を有した略筒型の形状を有する。
【0034】
ここで、略筒型の形状とは、被検体から一定距離の周囲の一定範囲を覆う形状であればよい。それぞれの開口部は小さいほどよく、後に説明するように、粒子線の照射野が通過できる範囲の大きさがあればよい。PET検出部201の筒型は、第1の開口部および第2の開口部によって2つの部分(図2における紙面に対し左右対称のC字型の部分)に分割されている。
【0035】
また、PET検出部201は、図3に示すように、第2支持アーム205の円弧部分に沿って動くようになっており、第2支持アーム205が水平の場合には、第1支持アーム203によって、天板110と平行な平面βと平行な方向に回転可能に保持される。すなわち、PET検出部201は、矢印Cで示すように、平面βと平行な方向に回転移動する。
【0036】
また、PET検出部201は、図3に示すように、第2支持アーム205によって、図3における被検体の体軸方向の周りに回転可能に保持されている。すなわち、図3の状態(未だいずれの方向にも回転を行っていない状態)では、PET検出部201は、矢印Aで示すように、平面αと平行な平面内で回転移動する。
【0037】
ここで、実施例1では、被検体に照射された粒子線のうち被検体を通過した粒子線がPET検出部201あたることで障害が発生したり故障したりすることの回避、および天板110へのPET検出部201の接触の回避のために第2の開口部を設けている。ただし、粒子線が被検体を通過する量は極めて少ないと考えられるため、PET検出部201に微小の粒子線があたることを許容でき、低い角度(天板110とPET検出部201が接触するような角度)からの粒子線の照射を行わない場合には、第2の開口部を有さない構成にしてもよい。この点、PET検出部201の形状をより大きな筒形にすれば、天板110との接触が避けられるとも考えられるが、この場合、PET検出部201が被検体から離れた位置に配置されることになり、ガンマ線の検出効率が低下するため好ましくない。
【0038】
PET検出部201は、最も一般的な構成では、検出素子として、前述の筒型の部分の内側の全面に多数のシンチレータアレイが配置されている。シンチレータアレイは、ガンマ線を検出するシンチレータ結晶、および微弱光パルスを高速かつ高感度に検出する光電子倍増管を有する。また、PET検出部201は、粒子線照射部103によって照射されることで被検体から発生したガンマ線をシンチレータアレイにて検出する。
【0039】
画像生成部202は、PET検出部201と補正係数算出部300と表示制御部020と接続され、PET検出部201によって検出されたガンマ線と補正係数算出部300によって算出された吸収補正係数とを用いてPET画像を生成し、生成したPET画像を表示制御部020へ出力する。具体的には、画像生成部202は、補正係数算出部300から受信した吸収補正係数を用いて、PET検出部201から受信した電気信号に対して吸収補正処理を行う。その後、画像生成部202は、その他の画像処理を行って、PET画像を生成する。
【0040】
第1支持アーム203は、第1制御部204と接続され、また、実施例1では、図3に示すように、天板110と逆方向から被検体を見下ろした状態でC字型の形状をしている。また、第1支持アーム203は、該C字型の部材を回転させるためのモータを有する。また、第1支持アーム203のC字型の部材の両端には、PET検出部201の2分割された筒型の各部分がそれぞれ固定されている。
【0041】
第1支持アーム203は、第1制御部204によって制御され、矢印Cの方向にPET検出部201を保持した状態でモータを駆動させることで、PET検出部201の2つの開口部を通過する軸を中心にPET検出部201を回転させる。例えば、第1支持アーム203が、図3の状態からモータによりC字型の部材を角度φ回転することで、PET検出部201は平面βと平行な方向に粒子線の放射方向の軸を中心に角度φ回転する。ここで、実施例1では第1支持アーム203はC字型としたが、これはPET検出部201の2つの部材を向き合う形で固定できる形状で回転可能な形状であれば他の形状でもよい。
【0042】
第1制御部204は、第1支持アーム203を制御する。具体的には、第1制御部204は、ユーザインタフェース010の入力部011と第1支持アーム203と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき第1支持アーム203を制御する。
【0043】
第2支持アーム205は、第2制御部206と接続され、また、実施例1では、図3に示すように、第1支持アーム203を保持することでPET検出部201を保持する保持部材と、該保持部材を回転させるモータとを有する。第2支持アーム205は、第1支持アーム203およびPET検出部201を被検体の体軸方向の周りに回転可能となるように保持している。
【0044】
第2支持アーム205は、第2制御部206によって制御され、モータを駆動することで保持部材を回転させ、それにより第1支持アーム203を矢印Aの方向に回転させる。また、第2支持アーム205に保持された第1支持アーム203が、被検体の体軸方向の周りに回転することで、第1支持アーム203に保持されたPET検出部201が、被検体の体軸方向の周りに回転移動を行うことになる。
【0045】
例えば、図3に示されている初期の状態では、第1支持アーム203によるPET検出部201の回転が行われていないため、PET検出部201と照射ノズル回転部104とは同じ回転平面を有する。すなわち、第2支持アーム205が角度θ回転することより、PET検出部201は平面α内を図3における被検体の体軸を中心に角度θ回転する。
【0046】
第2制御部206は、第2支持アーム205を制御する。具体的には、第2制御部206は、ユーザインタフェース010の入力部011と第2支持アーム205と補正係数算出部300と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき第2支持アーム205を制御する。また、第2制御部206は、第2支持アーム205の制御に用いた移動量を補正係数算出部300に通知する。
【0047】
ユーザインタフェース010は、入力部011と、表示部012とを備える。
【0048】
入力部011は、操作者から入力された操作指示を各部に出力する。具体的には、入力部011は、照射ノズル回転制御部105と、天板回転制御部107と天板移動制御部109と第1制御部204と第2制御部206と接続され、操作指示を受け付けると、受け付けた操作指示を各部に出力する。例えば、入力部011には、マウスやトラックボールなどのポインティングデバイス、あるいはキーボードなどの入力デバイスなどが利用される。
【0049】
表示部012は、各種情報やPET画像などを表示する。具体的には、表示部012は、表示制御部020と接続され、表示制御部020によって制御されてPET画像を表示する。例えば、表示部012には、液晶表示器などの表示デバイスなどが利用される。
【0050】
表示制御部020は、PET画像の表示を制御する。具体的には、表示制御部020は、画像生成部202とユーザインタフェース010と接続され、画像生成部202から入力されたPET画像をユーザインタフェース010の表示部012に表示させる。このように、ガンマ線の発生した位置を示すPET画像が表示部012に表示されることで、操作者は、粒子線が照射された被検体内の位置を把握することができ、そのPET画像を基に粒子線の照射位置を調整できる。これにより、より正確に照射対象部位に粒子線の照射を行うことが可能となる。
【0051】
[補正係数算出部300]
さて、上記してきたように、実施例1に係る粒子線治療装置は、治療計画において決定された粒子線の侵入位置や照射方向に基づき適切に粒子線が照射されるように、粒子線照射部103、天板110、およびPET検出部201を移動する。具体的には、照射回転ノズル制御部105、天板回転制御部107、天板移動制御部109、第1制御部204や第2制御部206が、入力部011から操作者によって入力された操作指示に基づき移動量を算出し、算出した移動量に基づき、粒子線照射部103、天板110、およびPET検出部201を移動する。この時、粒子線治療装置は、粒子線照射部103の回転および天板110の回転や並進移動を調整し、粒子線の適切な侵入位置や照射方向を決定する。また、PET検出部201が粒子線の照射野を遮らないように、かつPET検出部201の開口部を照射方向の中心軸が通過するように、PET検出部201を移動する。このようなことから、被検体に対して適切に粒子線を照射することができ、かつその時に発生するガンマ線を検出することができる。
【0052】
もっとも、実施例1に係る粒子線治療装置のように、PET検出部201が移動するようになると、PET画像の生成において、吸収補正係数による補正処理を適切に行うことができないという新たな課題が生じる。ここで、吸収補正係数による補正処理は、被検体から予め作成された減弱マップに基づく補正である。すなわち、減弱マップは、いわば被検体の座標系で作成されるものであり、PET検出部の検出素子の座標も、被検体との相対的な位置関係に基づき算出される。
【0053】
従来のPET検出部は、固定的に設置されているものであったので、被検体とPET検出部との相対的な位置関係に変動は生じず、検出素子の座標も変動しない。このため、吸収補正係数による補正処理も、固定的な座標を用いて行えばよい。しかしながら、PET検出部201が移動するようになると、被検体とPET検出部201との相対的な位置関係に変動が生じることになる。そうであるとすると、被検体とPET検出部201との相対的な位置関係ごとの吸収補正係数を用いなければ、適切な補正処理を行うことができないはずである。言い換えると、吸収補正係数による補正処理が固定的な座標によって行われてしまうと、適切な吸収補正係数による補正処理が行われず、正確なPET画像が生成されない結果、ひいては医療者に誤った照射位置の情報を提供してしまうおそれがある。
【0054】
そこで、実施例1に係る粒子線治療装置は、補正係数算出部300が、照射に応じて被検体とPET検出部201との相対的な位置関係に変動が生じるごとに、被検体とPET検出部201との相対的な位置関係を算出し、吸収補正係数を算出する。以下、詳細に説明する。
【0055】
図1に示すように、補正係数算出部300は、天板制御部109と第2制御部206と画像生成部202と接続され、吸収補正係数を算出する。具体的には、補正係数算出部300は、天板制御部109や第2制御部206から天板110の移動量や第2支持アーム205の移動量を受信する。また、補正係数算出部300は、被検体について作成された減弱マップ上の原点とPET検出部201の検出素子との相対的な位置関係を示す座標を、受信した移動量を用いて算出する。また、補正係数算出部300は、算出した座標を用いて吸収補正係数を算出し、算出した吸収補正係数を画像生成部202に伝送する。
【0056】
まず、補正係数算出部300による座標算出処理を説明する。PET検出部201の検出素子iと検出素子jとで検出された真の同時計測数は、以下の(1)式によって示される。
【数1】

すなわち、真の同時計測数は、検出素子iと検出素子jとで計測される同時計測数を、吸収補正係数と吸収補正以外の補正に関する係数とで補正したものである。なお、吸収補正以外の補正とは、例えば、検出素子ごとの感度補正や散乱数補正などのことであり、実施例1においては、吸収補正以外の補正に関する係数は予め求められているものとする。
【0057】
上記したように、補正係数算出部300は、照射に応じて被検体とPET検出部201との相対的な位置関係に変動が生じるごとに、吸収補正係数Aijを算出する。
【0058】
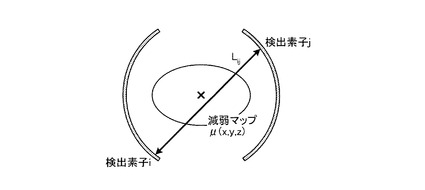
次に、吸収補正係数Aijは、以下の(2)式によって示される。
【数2】
すなわち、吸収補正係数Aijは、検出素子iと検出素子jとの間に存在する物質(実施例1において被検体)の吸収補正係数の分布である減弱マップを、検出素子iと検出素子jとを結ぶ線分に沿って積分したものである。なお、検出素子iと検出素子jとを結ぶLijを図4に示す。図4は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【0059】
(2)式に示すように、被検体とPET検出部201との相対的な位置関係に変動が生じるごとに吸収補正係数Aijを算出するには、検出素子iと検出素子jとを結ぶ線分Lijを算出しなければならない。また、線分Lijを算出するには、被検体とPET検出部201との相対的な位置関係に変動が生じた後の検出素子iおよび検出素子jの座標を算出しなければならない。
【0060】
そこで次に、相対的な位置関係に変動が生じた後の検出素子iおよび検出素子jの座標を算出する手法について説明する。実施例1における補正係数算出部300は、天板110の移動量や第2支持アーム205の移動量を用いて検出素子iおよび検出素子jの座標を算出する。後述するように、照射開始時においては、減弱マップの原点と照射中心とが一致している。そうであるとすると、照射開始時から天板110の移動量や第2支持アーム205がどれだけ移動したかを示す移動量を取得することができれば、減弱マップの原点がどれだけ移動したかを算出することができるはずである。以下、式を用いて具体的に説明する。
【0061】
まず、相対的な位置関係に変動が生じた後の検出素子iの座標を、以下の(3)式で示す。
【数3】
【0062】
また、相対的な位置関係に変動が生じた後の検出素子jの座標を、以下の(4)式で示す。
【数4】
【0063】
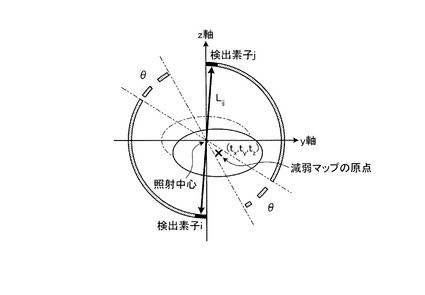
すると、照射開始時に照射中心を原点とする座標系で、すなわち、減弱マップの原点と照射中心とが一致している時の検出素子iが、第2支持アーム205がx軸周りにθ回転した後の座標は、以下の(5)式および(6)式によって算出される。
【数5】
【0064】
また、さらに、天板110がx軸、y軸、z軸方向に(tX、ty、tz)移動した後の座標は、以下の(7)式および(8)式によって算出される。
【数6】
なお、第2支持アーム205の移動および天板110の移動を図5に示す。図5は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【0065】
このように、同様に、補正係数算出部300は、天板110の移動量や第2支持アーム205の移動量を用いて検出素子jの座標を算出し、検出素子iおよび検出素子jの座標を算出すると、続いて、算出後の座標を用いて吸収補正係数Aijを算出する。すなわち、補正係数算出部300は、まず、以下の(9)式によって線分Lijを算出し、その後、(2)式に、算出した線分Lijを代入することで、吸収補正係数Aijを算出する。
【数7】
【0066】
こうして、補正係数算出部300は、照射に応じて被検体とPET検出部201との相対的な位置関係に変動が生じるごとに、被検体とPET検出部201との相対的な位置関係を算出し、吸収補正係数を算出することになる。
【0067】
なお、画像生成部202は、PET検出部201によって検出されたガンマ線と、補正係数算出部300によってこのように算出された吸収補正係数Aijとを用いて、以下の(10)式におけるf(r)(rは太字)を求めることで、PET画像を生成する。f(r)はガンマ線発生源密度分布であり、すなわち、どれだけ粒子線が照射されたかを示す分布である。
【数8】
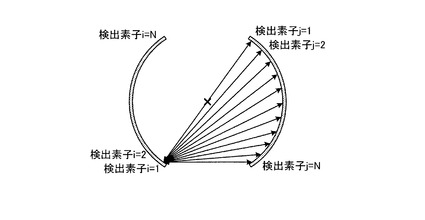
【0068】
ところで、同時計測において、検出素子iのペアとなる検出素子jはひとつではない。図6に示すようなPET検出器の構成では、ひとつの検出素子iにつき、ペアとなる検出素子jはN個存在する。図6は、検出素子を説明するための図である。なお、実施例1においては、検出素子i同士のペアは考えないこととする。すると、補正係数算出部300は、N個の検出素子iそれぞれについて、ペアとなるN個の検出素子jの吸収補正係数を算出することになり、被検体とPET検出部201とのある相対的な位置関係ごとに、N×N個の吸収補正係数からなる1組のデータセットが準備されることになる。
【0069】
[実施例1に係る粒子線治療装置による処理手順]
続いて、図7を用いて、実施例1に係る粒子線治療装置による処理手順を説明する。図7は、実施例1に係る粒子線治療装置による処理手順を示すフローチャートである。
【0070】
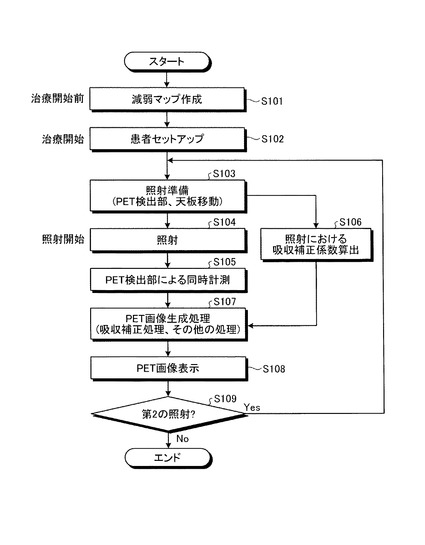
図7に示すように、粒子線治療装置を操作する操作者は、通常、治療開始前に被検体の減弱マップを作成する(ステップS101)。減弱マップは、例えば、専用線源を用いて撮影された画像から作成する手法や、CT(Computed Tomography)画像から作成する手法など、公知の手法によって作成することができる。
【0071】
なお、粒子線治療では、通常、治療計画がCT画像を用いて行われるため、治療計画に用いられたCT画像から減弱マップを作成するのがよい。治療計画においては、照射方向を決定するためにCT画像上で照射中心を決定する。したがって、このCT画像から作成された減弱マップ上での照射中心も判明する。減弱マップを作成する際に、減弱マップの原点と減弱マップ上での照射中心とを一致させておけば、ステップS102において、減弱マップ上の照射中心と実際の照射中心とが一致し、この結果、減弱マップの原点と実際の照射中心とが一致することになる。すると、照射開始時から天板110の移動量や第2支持アーム205がどれだけ移動したかを示す移動量を取得した場合に、減弱マップの原点がどれだけ移動したかを直接的に算出することができ、吸収補正係数の算出も容易である。
【0072】
次に、操作者は、粒子線治療装置の天板110の上に患者(被検体)をセットアップする(ステップS102)。具体的には、操作者は、被検体の表面や被検体を固定するカバーの表面に付されたマークを元に天板110の位置を調整し、ステップS101の治療計画において決定した位置に被検体を載置する。なお、上記したように、この作業によって、減弱マップ上での照射中心が実際の照射中心に一致し、この結果、減弱マップの原点と実際の照射中心とが一致する。
【0073】
続いて、操作者は、治療計画において決定した照射を行うための照射準備を行う(ステップS103)。具体的には、操作者は、粒子線照射部103の回転および天板110の回転や並進移動を調整する。また、操作者は、PET検出部201が粒子線の照射野を遮らないように、かつPET検出部201の開口部を照射方向の中心軸が通過するように、PET検出部201を移動させる。
【0074】
そして、粒子線治療装置は、照射を開始する(ステップS104)。具体的には、粒子線照射部103が、陽イオンを被検体に向けて照射する。
【0075】
続いて、粒子線治療装置は、同時計測を行う(ステップS105)。具体的には、PET検出部201が、被検体から発生するガンマ線を検出素子にて検出し、検出したガンマ線に基づく電気信号を画像生成部202に出力する。
【0076】
ところで、図7に示すように、粒子線治療装置は、ステップS104やステップS105の処理と並行して、吸収補正係数を算出する処理を行う(ステップS106)。具体的には、補正係数算出部300が、天板110の移動量や第2支持アーム205の移動量を用いて検出素子iおよび検出素子jの座標を算出し、算出した検出素子iおよび検出素子jの座標を用いて吸収補正係数Aijを算出する。
【0077】
すると、粒子線治療装置は、ステップS107において、PET画像を生成する処理を行う(ステップS107)。具体的には、画像生成部202は、補正係数算出部300から受信した吸収補正係数を用いて、PET検出部201から受信した電気信号に対して吸収補正処理やその他の画像処理を行い、PET画像を生成し、生成したPET画像を表示制御部020へ出力する。
【0078】
そして、粒子線治療装置は、PET画像を表示する(ステップS108)。具体的には、表示制御部020が、画像生成部202から入力されたPET画像をユーザインタフェース010の表示部012に表示させる。
【0079】
次に、粒子線治療装置は、照射が継続されるか(例えば第2の照射が行われるか)否かを判定する(ステップS109)。照射が継続されない場合には(ステップS109否定)、粒子線治療装置は、処理を終了する。一方、照射が継続される場合には(ステップS109肯定)、粒子線治療装置は、ステップS103に戻り、ステップS103〜ステップS108の処理を繰り返す。なお、粒子線治療装置は、ステップS109において照射が継続されると判定する限り、ステップS103に戻り、ステップS103〜ステップS108の処理を繰り返す。
【0080】
[実施例1の効果]
上記してきたように、実施例1において、粒子線照射部103は、天板100に載置された被検体に向けて粒子線を照射する。すると、PET検出部201は、被検体から発生するガンマ線を検出素子にて検出する。また、天板110およびPET検出部201は、照射に応じて移動する。このため、補正係数算出部300は、減弱マップの原点とPET検出部201の検出素子との相対的な位置関係を示す座標を、天板110およびPET検出部201の移動量を用いて算出し、算出した座標を用いて吸収補正係数を算出する。そして、画像生成部202は、PET検出部201によって検出されたガンマ線と補正係数算出部300によって算出された吸収補正係数とを用いて画像を生成する。
【0081】
このようなことから、実施例1によれば、被検体に対して適切に粒子線を照射することができ、かつその時に発生するガンマ線を検出することができる。また、実施例1によれば、適切な補正処理を行うことができる。
【実施例2】
【0082】
ところで、実施例1においては、粒子線治療装置が、照射の都度、検出素子の座標を算出し、その都度、吸収補正係数を算出する手法であった。しかしながら本発明はこれに限られるものではない。例えば、天板や第2支持アームの移動量と対応づけて検出素子の座標を予め算出しておき、また、予め算出した座標と対応づけて吸収補正係数を予め算出しておく手法でもよい。この手法によれば、天板や第2支持アームの移動量と対応づけて適切な吸収補正係数が予め準備されることになるので、粒子線治療装置は、照射の際には、予め準備された吸収補正係数を移動量に基づいて検索し、取得するのみでよい。この結果、粒子線治療装置の処理負荷を軽減することが可能になる。
【0083】
以下、図8を用いて、実施例2に係る粒子線治療装置を説明する。図8は、実施例2に係る粒子線治療装置の構成を示すブロック図である。
【0084】
図8に示すように、実施例2に係る粒子線治療装置は、補正係数算出部300の替わりに、治療計画部400と補正係数データセット照合部403とを備える。また、治療計画部400は、補正係数算出部401と補正係数記憶部402とを有する。
【0085】
補正係数算出部401は、補正係数記憶部402と接続される。具体的には、補正係数算出部401は、例えば治療計画時に想定されるものとして操作者から入力された天板110の移動量や第2支持アーム205の移動量を用いて、減弱マップ上の原点とPET検出部201の検出素子との相対的な位置関係を示す座標を算出する。また、補正係数算出部401は、算出した座標を用いて吸収補正係数を算出し、算出した吸収補正係数と、この算出に用いた天板110の移動量や第2支持アーム205の移動量とを対応づけて、補正係数記憶部402に伝送する。すなわち、補正係数算出部401は、天板110の移動量や第2支持アーム205の移動量ごとにN×N個の吸収補正係数が対応づけられたデータセットを補正係数記憶部402に伝送する。
【0086】
補正係数記憶部402は、補正係数算出部401と補正係数データセット照合部403と接続される。具体的には、補正係数記憶部402は、補正係数算出部401から受信したデータセットを記憶し、補正係数記憶部402が記憶するデータセットは、補正係数データセット照合部403による処理に用いられる。
【0087】
補正係数データセット照合部403は、天板制御部109と第2制御部206と補正係数記憶部402と画像生成部202と接続され、吸収補正係数を取得する。具体的には、補正係数データセット照合部403は、天板制御部109や第2制御部206から天板110の移動量や第2支持アーム205の移動量を受信する。また、補正係数データセット照合部403は、受信した天板110の移動量や第2支持アーム205の移動量を用いて補正係数記憶部402を参照し、この移動量に対応づけて記憶されているN×N個の吸収補正係数を取得する。そして、補正係数データセット照合部403は、取得した吸収補正係数を画像生成部202に送信する。
【0088】
[実施例2の効果]
上記してきたように、実施例2において、補正係数算出部401は、検出素子の座標を天板110およびPET検出部201の移動量を用いて予め算出する。また、補正係数算出部401は、吸収補正係数を、予め算出された検出素子の座標を用いて予め算出する。また、粒子線治療装置は、予め算出された吸収補正係数と、算出に用いられた天板110およびPET検出部201の移動量とを対応づけて記憶する補正係数記憶部402をさらに備える。また、粒子線治療装置は、補正係数データセット照合部403をさらに備え、補正係数データセット照合部403が、天板110およびPET検出部201の移動量を用いて補正係数記憶部402を参照し、移動量に対応づけて記憶されている吸収補正係数を取得する。そして、画像生成部202は、PET検出部202によって検出されたガンマ線と、補正係数データセット照合部403によって取得された吸収補正係数とを用いて画像を生成する。
【0089】
このようなことから、実施例2によれば、粒子線治療装置の処理負荷を軽減することが可能になる。
【実施例3】
【0090】
なお、これまで本発明の実施例1および2について説明してきたが、本発明は上記した実施例以外にも、種々の異なる形態にて実施されてよいものである。
【0091】
実施例1および2においては、天板110の移動量や第2支持アーム205の移動量のみを考慮する手法を説明してきた。これは、実施例1および2において例示した粒子線治療装置では、天板110の回転は、第1制御部204によって打ち消される(同じだけ回転する)構成となっていたためである。したがって、本発明は、天板110の移動量や第2支持アーム205の移動量のみを考慮する手法に限られず、天板110の回転の移動量などを考慮する手法にも同様に適用することができる。すなわち、この場合にも、上記した行列と同様に行列を決定し、天板回転制御部107から取得した移動量を用いて検出素子の座標を算出すればよい。
【符号の説明】
【0092】
010 ユーザインタフェース
011 入力部
012 表示部
020 表示制御部
100 粒子線治療部
101 粒子線発生/加速部
102 粒子線伝送部
103 粒子線照射部
104 照射ノズル回転部
105 照射ノズル回転制御部
106 天板回転部
107 天板回転制御部
108 天板移動部
109 天板移動制御部
110 天板
200 PET部
201 PET検出部
202 画像生成部
203 第1支持アーム
204 第1制御部
205 第2支持アーム
206 第2制御部
300 補正係数算出部
400 治療計画部
401 補正係数算出部
402 補正係数記憶部
403 補正係数データセット照合部
【技術分野】
【0001】
本発明は、粒子線治療装置に関する。
【背景技術】
【0002】
近年、加速された荷電粒子線(以下「粒子線」)を患部に照射することで癌細胞を破壊する粒子線治療が行われている。粒子は、停止直前に最大のエネルギー(Bragg Peak)を放出する。このため、被検体内でエネルギーが単調減衰するX線治療などに比較すると、粒子線治療では、患部以外の正常組織に対するダメージを抑制することができる。
【0003】
このようなことから、粒子線治療では、治療の観点に加え、ダメージ抑制の観点から、粒子線の侵入位置や照射方向が決定される。例えば、粒子線が被検体の体表から患部に到達するまでの距離が最短となるように決定されたり、重要な臓器に粒子線が照射されないように決定されたりする。また、最近では、粒子線の侵入位置や照射方向の自由度を高めることを目的として、回転ガントリーや回転寝台などを備える粒子線治療装置が登場している。
【0004】
ところで、被検体に照射された粒子線は、被検体内の原子と衝突して陽電子放射核を生成する。また、陽電子放射核から放射された陽電子は、近傍の電子と結合してガンマ線を発生する。このガンマ線を検出することができれば、粒子の停止位置、すなわち粒子が照射された位置を割り出すことができる。このため、最近では、粒子が照射された位置を割り出すことを目的として、PET(Positron Emission computed Tomography)検出部を備える粒子線治療装置が登場した。例えば、PET検出部がガンマ線を検出することで粒子の停止位置を割り出し、割り出した停止位置を画像上に出力する技術が開示されている(特許文献1など)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−189769号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記した従来の技術では、粒子線治療装置がPET検出部を備える結果、粒子線の侵入位置や照射方向の自由度が低くなってしまうという課題があった。すなわち、粒子線治療装置が、粒子線の侵入位置や照射方向の自由度を高めることを目的として回転ガントリーや回転寝台などを備えたとしても、粒子線の侵入位置や照射方向は、固定的に設置されたPET検出部の配置を優先して決定されざるを得ず、結果として、その自由度は低くなってしまう。
【0007】
そこで、本発明は、上記に鑑みてなされたものであって、粒子線の侵入位置や照射方向の自由度を高めつつ、かつ被検体から発生するガンマ線を検出するPET検出部を備えた粒子線治療装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記した課題を解決し、目的を達成するために、請求項1に記載の本発明は、天板に載置された被検体に向けて粒子線を照射する粒子線照射手段と、前記粒子線照射手段によって照射されることで前記被検体から発生するガンマ線を検出素子にて検出するPET検出手段と、前記天板および前記PET検出手段を前記照射に応じて移動させる移動手段と、前記被検体について作成された減弱マップの原点と前記PET検出手段の検出素子との相対的な位置関係を示す位置情報を、前記移動手段によって移動される前記天板および前記PET検出手段の移動量を用いて算出する位置情報算出手段と、前記位置情報算出手段によって算出された位置情報を用いて補正係数を算出する補正係数算出手段と、前記PET検出手段によって検出されたガンマ線と前記補正係数算出手段によって算出された補正係数とを用いて画像を生成する画像生成手段とを備えたことを特徴とする。
【発明の効果】
【0009】
請求項1の本発明によれば、粒子線の侵入位置や照射方向の自由度を高めつつ、かつ被検体から発生するガンマ線を検出するPET検出部を備えることが可能になるという効果を奏する。
【図面の簡単な説明】
【0010】
【図1】図1は、実施例1に係る粒子線治療装置の構成を示すブロック図である。
【図2】図2は、粒子線治療装置を回転ガントリーの回転軸方向からみた模式的な正面図および模式的な側面図である。
【図3】図3は、粒子線治療装置の模式的な上面図である。
【図4】図4は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【図5】図5は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【図6】図6は、検出素子を説明するための図である。
【図7】図7は、実施例1に係る粒子線治療装置による処理手順を示すフローチャートである。
【図8】図8は、実施例2に係る粒子線治療装置の構成を示すブロック図である。
【発明を実施するための形態】
【0011】
以下、本発明に係る粒子線治療装置の実施例を図面に基づいて詳細に説明する。なお、以下の実施例により本発明が限定されるものではない。
【実施例1】
【0012】
[実施例1に係る粒子線治療装置の構成]
まず、図1〜図6を用いて、実施例1に係る粒子線治療装置の構成を説明する。図1は、実施例1に係る粒子線治療装置の構成を示すブロック図である。
【0013】
図1に示すように、実施例1に係る粒子線治療装置は、ユーザインタフェース010と、表示制御部020と、粒子線治療部100と、PET部200と、補正係数算出部300とを備える。
【0014】
なお、図1においては、粒子線治療部100が備える各部を明示することを目的として破線を用い、同様に、PET部200が備える各部を明示することを目的として破線を用いている。また、図1においては、制御を行う各部については点線の枠で示した。また、図1においては、ユーザインタフェース010から制御を行う各部に操作内容が伝送される点や、制御を行う各部から各機構に制御内容が伝送される点については点線の矢印で示し、それ以外の情報が伝送される点については実線の矢印で示している。また、矢印ではない実線で接続されている各部は、一方が他方に支持される関係にあるなど、物理的に連動する関係にあることを示す。
【0015】
実施例1に係る粒子線治療装置は、粒子線治療部100を備え、被検体の患部に粒子線を照射することで患部の細胞を破壊する治療を行う。また、実施例1に係る粒子線治療装置は、PET部200を備え、粒子線が照射されている位置を検出する。すなわち、実施例1に係る粒子線治療装置は、PET部200によって検出される粒子線の照射位置に基づき、粒子線治療部100によって粒子線を照射することで、照射対象となる患部(以下「照射対象部位」)に正確に粒子線を照射し、効果的な治療を行う。
【0016】
具体的には、実施例1に係る粒子線治療装置は、粒子線の照射方向を最適な位置に設定するように粒子線照射部103および天板110を移動させる。また、粒子線治療装置は、その粒子線の照射を妨げないように、すなわち、粒子線の照射野を妨げないように、および接触などの機械的な干渉を起こさないように、PET検出部201を移動させる。以下では、粒子線治療部100、PET部200、補正係数算出部300、ユーザインタフェース010、表示制御部020を順に説明する。
【0017】
図1に示すように、粒子線治療部100は、粒子線発生/加速部101と、粒子線伝送部102と、粒子線照射部103(照射ノズル)と、照射ノズル回転部104(回転ガントリー)と、照射ノズル回転制御部105とを備える。
【0018】
粒子線発生/加速部101は、粒子線伝送部102と接続され、イオン源と、直線加速器、サイクロトロン、シンクロトロンなどの加速器(いずれも不図示)とを有する。具体的には、まず、粒子線発生/加速部101は、イオン源で陽イオン(例えば、水素イオン、ヘリウムイオン、炭素イオン、ネオンイオンなど)を発生させる。次に、粒子線発生/加速部101は、発生させた陽イオンを加速器で所定のエネルギーまで加速する。例えば、粒子線発生/加速部101は、発生した陽イオンを直線加速器で加速し、直線加速器から射出された陽イオンをシンクロトロンなどでさらに加速することで、所定のエネルギーまで加速する。そして、粒子線発生/加速部101は、所定のエネルギーまで加速された陽イオンを粒子線伝送部102に射出する。
【0019】
粒子線伝送部102は、粒子線発生/加速部101と粒子線照射部103と接続され、粒子線発生/加速部101から粒子線照射部103へと繋がるビーム経路(不図示)を有する。具体的には、粒子線伝送部102は、粒子線発生/加速部101から射出された陽イオンをビーム経路を経由させて粒子線照射部103へと伝送する。
【0020】
粒子線照射部103は、粒子線伝送部102と接続され、また、図2の(A)に示すように、照射ノズル回転部104の内壁の所定位置に設置されている。図2は、粒子線治療装置を回転ガントリーの回転軸方向からみた模式的な正面図および模式的な側面図である。
【0021】
粒子線照射部103は、照射ノズル回転部104の回転とともに被検体の周りを回転する。また、粒子線照射部103は、粒子線伝送部102から伝送された陽イオンを被検体に向けて照射する。この時、粒子線照射部103は、照射中心(アイソセンター)に向けて粒子線の照射を行う。なお、粒子線照射部103の回転の基準位置を図2の(A)のように位置P1に位置している状態とする。すなわち、被検体を真下に見る位置に粒子線照射部103が位置している状態を粒子線照射部103の角度θ=0の状態とする。
【0022】
照射ノズル回転部104は、照射ノズル回転制御部105と接続され、また、図2の(A)に示すように、粒子線照射部103を設置する。
【0023】
照射ノズル回転部104は、図2の(A)に示すように、側面から見ると中心軸Sを中心に円形をしているガントリーおよび該ガントリーを回転させるモータ(不図示)を有する。ここで、図2の(B)に示すように、図2の(A)の中心軸Sは照射中心を通過する軸で、図2の(A)の紙面正面から裏面に向けて貫通している軸を表している。また、以下の説明では、中心軸Sに直交し照射中心を貫通する平面を平面αとする。照射ノズル回転部104のガントリーは、平面α内を回転移動するため、平面αは固定平面である。
【0024】
そして、照射ノズル回転部104のガントリーは、図2の(B)に示すように、中心軸Sに沿う方向に厚みを有した略筒型の形状を有している。さらに、照射ノズル回転部104のガントリーは、照射ノズル回転制御部105によって制御されることで、中心軸Sを中心に回転を行う。これにより、粒子線照射部103も中心軸Sを中心に回転を行うことになる。
【0025】
実施例1では、図2の(A)における点P1を基準位置として点P1からの粒子線照射部103までの角度を平面αにおける照射角度とする。具体的には、中心軸Sに向けて照射角度θで粒子線を照射する場合には、照射ノズル回転部104のガントリーは、照射角度θ分回転することになる。
【0026】
照射ノズル回転制御部105は、照射ノズル回転部104を制御する。具体的には、照射ノズル回転制御部105は、ユーザインタフェース010の入力部011と照射ノズル回転部104と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき照射ノズル回転部104を制御する。
【0027】
天板110は、床に平行で人が寝られる大きさの板状の形状を有する。天板110の上には、粒子線治療を行う対象である被検体を載置する。被検体が載置されている平面を「載置平面」と呼ぶことにする。天板110は、天板移動部108によって、載置した被検体の体軸方向またはその直交方向に並進移動が行われる。また、天板110は、天板回転部106によって、載置平面内で回転移動が行われる。
【0028】
天板移動部108は、天板移動制御部109と接続され、天板110を被検体の体軸方向またはその直交方向に並進移動させる機構と、該機構を動かすモータとを有する。具体的には、天板移動部108は、天板移動制御部109によって制御されてモータを駆動することで、天板110を被検体の体軸方向またはその直交方向に移動させる。例えば、天板移動部108のモータによりギアなどの回転部材を回転させて、ギアとかみ合う水平移動部材が移動することで、天板110が並進移動する構成になっている。
【0029】
天板移動制御部109は、天板移動部108を制御する。具体的には、天板移動制御部109は、ユーザインタフェース010の入力部011と天板移動部108と補正係数算出部300と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき天板移動部108を制御する。また、天板移動制御部109は、天板移動部108の制御に用いた移動量を補正係数算出部300に通知する。
【0030】
天板回転部106は、天板回転制御部107と接続され、天板移動部108および天板110を天板110と平行な平面内で回転させる円盤と、該円盤を動かすモータとを有する。具体的には、天板回転部106は、天板回転制御部107によって制御されてモータを駆動することで、天板110と平行な平面内で天板110および天板移動部108を照射中心を軸に回転させる。すなわち、天板回転部106は、図3で示す矢印Bのように、天板110および天板移動部108を回転移動させる。天板110と平行な平面でかつ被検体の体軸を含む平面を平面βとする。図3は、粒子線治療装置の模式的な上面図である。
【0031】
天板回転制御部107は、天板回転部106を制御する。具体的には、天板回転制御部107は、ユーザインタフェース010の入力部011と天板回転部106と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき天板回転部106を制御する。
【0032】
PET部200は、図1に示すように、PET検出部201と、画像生成部202と、第1支持アーム203と、第1制御部204と、第2支持アーム205と、第2制御部206とを備える。
【0033】
PET検出部201は、画像生成部202と接続され、被検体から発生するガンマ線を検出素子にて検出し、検出したガンマ線に基づく電気信号を画像生成部202に出力する。具体的には、PET検出部201は、図2の(A)に示すように、照射ノズル回転部104および粒子線照射部103の内側に、天板110および天板110に載置された被検体を囲むように配置される。また、PET検出部201は、図2の(B)に示すように、中心軸Sに沿う方向に厚みを有する。また、PET検出部201は、図2の(A)に示すように、粒子線照射部103と照射中心との間に粒子線を通過させるための第1の開口部、および被検体から見て粒子線照射部103と反対側の部分(第1の開口部と反対側の部分)に第2の開口部を有した略筒型の形状を有する。
【0034】
ここで、略筒型の形状とは、被検体から一定距離の周囲の一定範囲を覆う形状であればよい。それぞれの開口部は小さいほどよく、後に説明するように、粒子線の照射野が通過できる範囲の大きさがあればよい。PET検出部201の筒型は、第1の開口部および第2の開口部によって2つの部分(図2における紙面に対し左右対称のC字型の部分)に分割されている。
【0035】
また、PET検出部201は、図3に示すように、第2支持アーム205の円弧部分に沿って動くようになっており、第2支持アーム205が水平の場合には、第1支持アーム203によって、天板110と平行な平面βと平行な方向に回転可能に保持される。すなわち、PET検出部201は、矢印Cで示すように、平面βと平行な方向に回転移動する。
【0036】
また、PET検出部201は、図3に示すように、第2支持アーム205によって、図3における被検体の体軸方向の周りに回転可能に保持されている。すなわち、図3の状態(未だいずれの方向にも回転を行っていない状態)では、PET検出部201は、矢印Aで示すように、平面αと平行な平面内で回転移動する。
【0037】
ここで、実施例1では、被検体に照射された粒子線のうち被検体を通過した粒子線がPET検出部201あたることで障害が発生したり故障したりすることの回避、および天板110へのPET検出部201の接触の回避のために第2の開口部を設けている。ただし、粒子線が被検体を通過する量は極めて少ないと考えられるため、PET検出部201に微小の粒子線があたることを許容でき、低い角度(天板110とPET検出部201が接触するような角度)からの粒子線の照射を行わない場合には、第2の開口部を有さない構成にしてもよい。この点、PET検出部201の形状をより大きな筒形にすれば、天板110との接触が避けられるとも考えられるが、この場合、PET検出部201が被検体から離れた位置に配置されることになり、ガンマ線の検出効率が低下するため好ましくない。
【0038】
PET検出部201は、最も一般的な構成では、検出素子として、前述の筒型の部分の内側の全面に多数のシンチレータアレイが配置されている。シンチレータアレイは、ガンマ線を検出するシンチレータ結晶、および微弱光パルスを高速かつ高感度に検出する光電子倍増管を有する。また、PET検出部201は、粒子線照射部103によって照射されることで被検体から発生したガンマ線をシンチレータアレイにて検出する。
【0039】
画像生成部202は、PET検出部201と補正係数算出部300と表示制御部020と接続され、PET検出部201によって検出されたガンマ線と補正係数算出部300によって算出された吸収補正係数とを用いてPET画像を生成し、生成したPET画像を表示制御部020へ出力する。具体的には、画像生成部202は、補正係数算出部300から受信した吸収補正係数を用いて、PET検出部201から受信した電気信号に対して吸収補正処理を行う。その後、画像生成部202は、その他の画像処理を行って、PET画像を生成する。
【0040】
第1支持アーム203は、第1制御部204と接続され、また、実施例1では、図3に示すように、天板110と逆方向から被検体を見下ろした状態でC字型の形状をしている。また、第1支持アーム203は、該C字型の部材を回転させるためのモータを有する。また、第1支持アーム203のC字型の部材の両端には、PET検出部201の2分割された筒型の各部分がそれぞれ固定されている。
【0041】
第1支持アーム203は、第1制御部204によって制御され、矢印Cの方向にPET検出部201を保持した状態でモータを駆動させることで、PET検出部201の2つの開口部を通過する軸を中心にPET検出部201を回転させる。例えば、第1支持アーム203が、図3の状態からモータによりC字型の部材を角度φ回転することで、PET検出部201は平面βと平行な方向に粒子線の放射方向の軸を中心に角度φ回転する。ここで、実施例1では第1支持アーム203はC字型としたが、これはPET検出部201の2つの部材を向き合う形で固定できる形状で回転可能な形状であれば他の形状でもよい。
【0042】
第1制御部204は、第1支持アーム203を制御する。具体的には、第1制御部204は、ユーザインタフェース010の入力部011と第1支持アーム203と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき第1支持アーム203を制御する。
【0043】
第2支持アーム205は、第2制御部206と接続され、また、実施例1では、図3に示すように、第1支持アーム203を保持することでPET検出部201を保持する保持部材と、該保持部材を回転させるモータとを有する。第2支持アーム205は、第1支持アーム203およびPET検出部201を被検体の体軸方向の周りに回転可能となるように保持している。
【0044】
第2支持アーム205は、第2制御部206によって制御され、モータを駆動することで保持部材を回転させ、それにより第1支持アーム203を矢印Aの方向に回転させる。また、第2支持アーム205に保持された第1支持アーム203が、被検体の体軸方向の周りに回転することで、第1支持アーム203に保持されたPET検出部201が、被検体の体軸方向の周りに回転移動を行うことになる。
【0045】
例えば、図3に示されている初期の状態では、第1支持アーム203によるPET検出部201の回転が行われていないため、PET検出部201と照射ノズル回転部104とは同じ回転平面を有する。すなわち、第2支持アーム205が角度θ回転することより、PET検出部201は平面α内を図3における被検体の体軸を中心に角度θ回転する。
【0046】
第2制御部206は、第2支持アーム205を制御する。具体的には、第2制御部206は、ユーザインタフェース010の入力部011と第2支持アーム205と補正係数算出部300と接続され、入力部011から入力された操作指示に基づき移動量を算出し、算出した移動量に基づき第2支持アーム205を制御する。また、第2制御部206は、第2支持アーム205の制御に用いた移動量を補正係数算出部300に通知する。
【0047】
ユーザインタフェース010は、入力部011と、表示部012とを備える。
【0048】
入力部011は、操作者から入力された操作指示を各部に出力する。具体的には、入力部011は、照射ノズル回転制御部105と、天板回転制御部107と天板移動制御部109と第1制御部204と第2制御部206と接続され、操作指示を受け付けると、受け付けた操作指示を各部に出力する。例えば、入力部011には、マウスやトラックボールなどのポインティングデバイス、あるいはキーボードなどの入力デバイスなどが利用される。
【0049】
表示部012は、各種情報やPET画像などを表示する。具体的には、表示部012は、表示制御部020と接続され、表示制御部020によって制御されてPET画像を表示する。例えば、表示部012には、液晶表示器などの表示デバイスなどが利用される。
【0050】
表示制御部020は、PET画像の表示を制御する。具体的には、表示制御部020は、画像生成部202とユーザインタフェース010と接続され、画像生成部202から入力されたPET画像をユーザインタフェース010の表示部012に表示させる。このように、ガンマ線の発生した位置を示すPET画像が表示部012に表示されることで、操作者は、粒子線が照射された被検体内の位置を把握することができ、そのPET画像を基に粒子線の照射位置を調整できる。これにより、より正確に照射対象部位に粒子線の照射を行うことが可能となる。
【0051】
[補正係数算出部300]
さて、上記してきたように、実施例1に係る粒子線治療装置は、治療計画において決定された粒子線の侵入位置や照射方向に基づき適切に粒子線が照射されるように、粒子線照射部103、天板110、およびPET検出部201を移動する。具体的には、照射回転ノズル制御部105、天板回転制御部107、天板移動制御部109、第1制御部204や第2制御部206が、入力部011から操作者によって入力された操作指示に基づき移動量を算出し、算出した移動量に基づき、粒子線照射部103、天板110、およびPET検出部201を移動する。この時、粒子線治療装置は、粒子線照射部103の回転および天板110の回転や並進移動を調整し、粒子線の適切な侵入位置や照射方向を決定する。また、PET検出部201が粒子線の照射野を遮らないように、かつPET検出部201の開口部を照射方向の中心軸が通過するように、PET検出部201を移動する。このようなことから、被検体に対して適切に粒子線を照射することができ、かつその時に発生するガンマ線を検出することができる。
【0052】
もっとも、実施例1に係る粒子線治療装置のように、PET検出部201が移動するようになると、PET画像の生成において、吸収補正係数による補正処理を適切に行うことができないという新たな課題が生じる。ここで、吸収補正係数による補正処理は、被検体から予め作成された減弱マップに基づく補正である。すなわち、減弱マップは、いわば被検体の座標系で作成されるものであり、PET検出部の検出素子の座標も、被検体との相対的な位置関係に基づき算出される。
【0053】
従来のPET検出部は、固定的に設置されているものであったので、被検体とPET検出部との相対的な位置関係に変動は生じず、検出素子の座標も変動しない。このため、吸収補正係数による補正処理も、固定的な座標を用いて行えばよい。しかしながら、PET検出部201が移動するようになると、被検体とPET検出部201との相対的な位置関係に変動が生じることになる。そうであるとすると、被検体とPET検出部201との相対的な位置関係ごとの吸収補正係数を用いなければ、適切な補正処理を行うことができないはずである。言い換えると、吸収補正係数による補正処理が固定的な座標によって行われてしまうと、適切な吸収補正係数による補正処理が行われず、正確なPET画像が生成されない結果、ひいては医療者に誤った照射位置の情報を提供してしまうおそれがある。
【0054】
そこで、実施例1に係る粒子線治療装置は、補正係数算出部300が、照射に応じて被検体とPET検出部201との相対的な位置関係に変動が生じるごとに、被検体とPET検出部201との相対的な位置関係を算出し、吸収補正係数を算出する。以下、詳細に説明する。
【0055】
図1に示すように、補正係数算出部300は、天板制御部109と第2制御部206と画像生成部202と接続され、吸収補正係数を算出する。具体的には、補正係数算出部300は、天板制御部109や第2制御部206から天板110の移動量や第2支持アーム205の移動量を受信する。また、補正係数算出部300は、被検体について作成された減弱マップ上の原点とPET検出部201の検出素子との相対的な位置関係を示す座標を、受信した移動量を用いて算出する。また、補正係数算出部300は、算出した座標を用いて吸収補正係数を算出し、算出した吸収補正係数を画像生成部202に伝送する。
【0056】
まず、補正係数算出部300による座標算出処理を説明する。PET検出部201の検出素子iと検出素子jとで検出された真の同時計測数は、以下の(1)式によって示される。
【数1】
すなわち、真の同時計測数は、検出素子iと検出素子jとで計測される同時計測数を、吸収補正係数と吸収補正以外の補正に関する係数とで補正したものである。なお、吸収補正以外の補正とは、例えば、検出素子ごとの感度補正や散乱数補正などのことであり、実施例1においては、吸収補正以外の補正に関する係数は予め求められているものとする。
【0057】
上記したように、補正係数算出部300は、照射に応じて被検体とPET検出部201との相対的な位置関係に変動が生じるごとに、吸収補正係数Aijを算出する。
【0058】
次に、吸収補正係数Aijは、以下の(2)式によって示される。
【数2】
すなわち、吸収補正係数Aijは、検出素子iと検出素子jとの間に存在する物質(実施例1において被検体)の吸収補正係数の分布である減弱マップを、検出素子iと検出素子jとを結ぶ線分に沿って積分したものである。なお、検出素子iと検出素子jとを結ぶLijを図4に示す。図4は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【0059】
(2)式に示すように、被検体とPET検出部201との相対的な位置関係に変動が生じるごとに吸収補正係数Aijを算出するには、検出素子iと検出素子jとを結ぶ線分Lijを算出しなければならない。また、線分Lijを算出するには、被検体とPET検出部201との相対的な位置関係に変動が生じた後の検出素子iおよび検出素子jの座標を算出しなければならない。
【0060】
そこで次に、相対的な位置関係に変動が生じた後の検出素子iおよび検出素子jの座標を算出する手法について説明する。実施例1における補正係数算出部300は、天板110の移動量や第2支持アーム205の移動量を用いて検出素子iおよび検出素子jの座標を算出する。後述するように、照射開始時においては、減弱マップの原点と照射中心とが一致している。そうであるとすると、照射開始時から天板110の移動量や第2支持アーム205がどれだけ移動したかを示す移動量を取得することができれば、減弱マップの原点がどれだけ移動したかを算出することができるはずである。以下、式を用いて具体的に説明する。
【0061】
まず、相対的な位置関係に変動が生じた後の検出素子iの座標を、以下の(3)式で示す。
【数3】
【0062】
また、相対的な位置関係に変動が生じた後の検出素子jの座標を、以下の(4)式で示す。
【数4】
【0063】
すると、照射開始時に照射中心を原点とする座標系で、すなわち、減弱マップの原点と照射中心とが一致している時の検出素子iが、第2支持アーム205がx軸周りにθ回転した後の座標は、以下の(5)式および(6)式によって算出される。
【数5】
【0064】
また、さらに、天板110がx軸、y軸、z軸方向に(tX、ty、tz)移動した後の座標は、以下の(7)式および(8)式によって算出される。
【数6】
なお、第2支持アーム205の移動および天板110の移動を図5に示す。図5は、減弱マップの原点と検出素子との相対的な位置関係を説明するための図である。
【0065】
このように、同様に、補正係数算出部300は、天板110の移動量や第2支持アーム205の移動量を用いて検出素子jの座標を算出し、検出素子iおよび検出素子jの座標を算出すると、続いて、算出後の座標を用いて吸収補正係数Aijを算出する。すなわち、補正係数算出部300は、まず、以下の(9)式によって線分Lijを算出し、その後、(2)式に、算出した線分Lijを代入することで、吸収補正係数Aijを算出する。
【数7】
【0066】
こうして、補正係数算出部300は、照射に応じて被検体とPET検出部201との相対的な位置関係に変動が生じるごとに、被検体とPET検出部201との相対的な位置関係を算出し、吸収補正係数を算出することになる。
【0067】
なお、画像生成部202は、PET検出部201によって検出されたガンマ線と、補正係数算出部300によってこのように算出された吸収補正係数Aijとを用いて、以下の(10)式におけるf(r)(rは太字)を求めることで、PET画像を生成する。f(r)はガンマ線発生源密度分布であり、すなわち、どれだけ粒子線が照射されたかを示す分布である。
【数8】
【0068】
ところで、同時計測において、検出素子iのペアとなる検出素子jはひとつではない。図6に示すようなPET検出器の構成では、ひとつの検出素子iにつき、ペアとなる検出素子jはN個存在する。図6は、検出素子を説明するための図である。なお、実施例1においては、検出素子i同士のペアは考えないこととする。すると、補正係数算出部300は、N個の検出素子iそれぞれについて、ペアとなるN個の検出素子jの吸収補正係数を算出することになり、被検体とPET検出部201とのある相対的な位置関係ごとに、N×N個の吸収補正係数からなる1組のデータセットが準備されることになる。
【0069】
[実施例1に係る粒子線治療装置による処理手順]
続いて、図7を用いて、実施例1に係る粒子線治療装置による処理手順を説明する。図7は、実施例1に係る粒子線治療装置による処理手順を示すフローチャートである。
【0070】
図7に示すように、粒子線治療装置を操作する操作者は、通常、治療開始前に被検体の減弱マップを作成する(ステップS101)。減弱マップは、例えば、専用線源を用いて撮影された画像から作成する手法や、CT(Computed Tomography)画像から作成する手法など、公知の手法によって作成することができる。
【0071】
なお、粒子線治療では、通常、治療計画がCT画像を用いて行われるため、治療計画に用いられたCT画像から減弱マップを作成するのがよい。治療計画においては、照射方向を決定するためにCT画像上で照射中心を決定する。したがって、このCT画像から作成された減弱マップ上での照射中心も判明する。減弱マップを作成する際に、減弱マップの原点と減弱マップ上での照射中心とを一致させておけば、ステップS102において、減弱マップ上の照射中心と実際の照射中心とが一致し、この結果、減弱マップの原点と実際の照射中心とが一致することになる。すると、照射開始時から天板110の移動量や第2支持アーム205がどれだけ移動したかを示す移動量を取得した場合に、減弱マップの原点がどれだけ移動したかを直接的に算出することができ、吸収補正係数の算出も容易である。
【0072】
次に、操作者は、粒子線治療装置の天板110の上に患者(被検体)をセットアップする(ステップS102)。具体的には、操作者は、被検体の表面や被検体を固定するカバーの表面に付されたマークを元に天板110の位置を調整し、ステップS101の治療計画において決定した位置に被検体を載置する。なお、上記したように、この作業によって、減弱マップ上での照射中心が実際の照射中心に一致し、この結果、減弱マップの原点と実際の照射中心とが一致する。
【0073】
続いて、操作者は、治療計画において決定した照射を行うための照射準備を行う(ステップS103)。具体的には、操作者は、粒子線照射部103の回転および天板110の回転や並進移動を調整する。また、操作者は、PET検出部201が粒子線の照射野を遮らないように、かつPET検出部201の開口部を照射方向の中心軸が通過するように、PET検出部201を移動させる。
【0074】
そして、粒子線治療装置は、照射を開始する(ステップS104)。具体的には、粒子線照射部103が、陽イオンを被検体に向けて照射する。
【0075】
続いて、粒子線治療装置は、同時計測を行う(ステップS105)。具体的には、PET検出部201が、被検体から発生するガンマ線を検出素子にて検出し、検出したガンマ線に基づく電気信号を画像生成部202に出力する。
【0076】
ところで、図7に示すように、粒子線治療装置は、ステップS104やステップS105の処理と並行して、吸収補正係数を算出する処理を行う(ステップS106)。具体的には、補正係数算出部300が、天板110の移動量や第2支持アーム205の移動量を用いて検出素子iおよび検出素子jの座標を算出し、算出した検出素子iおよび検出素子jの座標を用いて吸収補正係数Aijを算出する。
【0077】
すると、粒子線治療装置は、ステップS107において、PET画像を生成する処理を行う(ステップS107)。具体的には、画像生成部202は、補正係数算出部300から受信した吸収補正係数を用いて、PET検出部201から受信した電気信号に対して吸収補正処理やその他の画像処理を行い、PET画像を生成し、生成したPET画像を表示制御部020へ出力する。
【0078】
そして、粒子線治療装置は、PET画像を表示する(ステップS108)。具体的には、表示制御部020が、画像生成部202から入力されたPET画像をユーザインタフェース010の表示部012に表示させる。
【0079】
次に、粒子線治療装置は、照射が継続されるか(例えば第2の照射が行われるか)否かを判定する(ステップS109)。照射が継続されない場合には(ステップS109否定)、粒子線治療装置は、処理を終了する。一方、照射が継続される場合には(ステップS109肯定)、粒子線治療装置は、ステップS103に戻り、ステップS103〜ステップS108の処理を繰り返す。なお、粒子線治療装置は、ステップS109において照射が継続されると判定する限り、ステップS103に戻り、ステップS103〜ステップS108の処理を繰り返す。
【0080】
[実施例1の効果]
上記してきたように、実施例1において、粒子線照射部103は、天板100に載置された被検体に向けて粒子線を照射する。すると、PET検出部201は、被検体から発生するガンマ線を検出素子にて検出する。また、天板110およびPET検出部201は、照射に応じて移動する。このため、補正係数算出部300は、減弱マップの原点とPET検出部201の検出素子との相対的な位置関係を示す座標を、天板110およびPET検出部201の移動量を用いて算出し、算出した座標を用いて吸収補正係数を算出する。そして、画像生成部202は、PET検出部201によって検出されたガンマ線と補正係数算出部300によって算出された吸収補正係数とを用いて画像を生成する。
【0081】
このようなことから、実施例1によれば、被検体に対して適切に粒子線を照射することができ、かつその時に発生するガンマ線を検出することができる。また、実施例1によれば、適切な補正処理を行うことができる。
【実施例2】
【0082】
ところで、実施例1においては、粒子線治療装置が、照射の都度、検出素子の座標を算出し、その都度、吸収補正係数を算出する手法であった。しかしながら本発明はこれに限られるものではない。例えば、天板や第2支持アームの移動量と対応づけて検出素子の座標を予め算出しておき、また、予め算出した座標と対応づけて吸収補正係数を予め算出しておく手法でもよい。この手法によれば、天板や第2支持アームの移動量と対応づけて適切な吸収補正係数が予め準備されることになるので、粒子線治療装置は、照射の際には、予め準備された吸収補正係数を移動量に基づいて検索し、取得するのみでよい。この結果、粒子線治療装置の処理負荷を軽減することが可能になる。
【0083】
以下、図8を用いて、実施例2に係る粒子線治療装置を説明する。図8は、実施例2に係る粒子線治療装置の構成を示すブロック図である。
【0084】
図8に示すように、実施例2に係る粒子線治療装置は、補正係数算出部300の替わりに、治療計画部400と補正係数データセット照合部403とを備える。また、治療計画部400は、補正係数算出部401と補正係数記憶部402とを有する。
【0085】
補正係数算出部401は、補正係数記憶部402と接続される。具体的には、補正係数算出部401は、例えば治療計画時に想定されるものとして操作者から入力された天板110の移動量や第2支持アーム205の移動量を用いて、減弱マップ上の原点とPET検出部201の検出素子との相対的な位置関係を示す座標を算出する。また、補正係数算出部401は、算出した座標を用いて吸収補正係数を算出し、算出した吸収補正係数と、この算出に用いた天板110の移動量や第2支持アーム205の移動量とを対応づけて、補正係数記憶部402に伝送する。すなわち、補正係数算出部401は、天板110の移動量や第2支持アーム205の移動量ごとにN×N個の吸収補正係数が対応づけられたデータセットを補正係数記憶部402に伝送する。
【0086】
補正係数記憶部402は、補正係数算出部401と補正係数データセット照合部403と接続される。具体的には、補正係数記憶部402は、補正係数算出部401から受信したデータセットを記憶し、補正係数記憶部402が記憶するデータセットは、補正係数データセット照合部403による処理に用いられる。
【0087】
補正係数データセット照合部403は、天板制御部109と第2制御部206と補正係数記憶部402と画像生成部202と接続され、吸収補正係数を取得する。具体的には、補正係数データセット照合部403は、天板制御部109や第2制御部206から天板110の移動量や第2支持アーム205の移動量を受信する。また、補正係数データセット照合部403は、受信した天板110の移動量や第2支持アーム205の移動量を用いて補正係数記憶部402を参照し、この移動量に対応づけて記憶されているN×N個の吸収補正係数を取得する。そして、補正係数データセット照合部403は、取得した吸収補正係数を画像生成部202に送信する。
【0088】
[実施例2の効果]
上記してきたように、実施例2において、補正係数算出部401は、検出素子の座標を天板110およびPET検出部201の移動量を用いて予め算出する。また、補正係数算出部401は、吸収補正係数を、予め算出された検出素子の座標を用いて予め算出する。また、粒子線治療装置は、予め算出された吸収補正係数と、算出に用いられた天板110およびPET検出部201の移動量とを対応づけて記憶する補正係数記憶部402をさらに備える。また、粒子線治療装置は、補正係数データセット照合部403をさらに備え、補正係数データセット照合部403が、天板110およびPET検出部201の移動量を用いて補正係数記憶部402を参照し、移動量に対応づけて記憶されている吸収補正係数を取得する。そして、画像生成部202は、PET検出部202によって検出されたガンマ線と、補正係数データセット照合部403によって取得された吸収補正係数とを用いて画像を生成する。
【0089】
このようなことから、実施例2によれば、粒子線治療装置の処理負荷を軽減することが可能になる。
【実施例3】
【0090】
なお、これまで本発明の実施例1および2について説明してきたが、本発明は上記した実施例以外にも、種々の異なる形態にて実施されてよいものである。
【0091】
実施例1および2においては、天板110の移動量や第2支持アーム205の移動量のみを考慮する手法を説明してきた。これは、実施例1および2において例示した粒子線治療装置では、天板110の回転は、第1制御部204によって打ち消される(同じだけ回転する)構成となっていたためである。したがって、本発明は、天板110の移動量や第2支持アーム205の移動量のみを考慮する手法に限られず、天板110の回転の移動量などを考慮する手法にも同様に適用することができる。すなわち、この場合にも、上記した行列と同様に行列を決定し、天板回転制御部107から取得した移動量を用いて検出素子の座標を算出すればよい。
【符号の説明】
【0092】
010 ユーザインタフェース
011 入力部
012 表示部
020 表示制御部
100 粒子線治療部
101 粒子線発生/加速部
102 粒子線伝送部
103 粒子線照射部
104 照射ノズル回転部
105 照射ノズル回転制御部
106 天板回転部
107 天板回転制御部
108 天板移動部
109 天板移動制御部
110 天板
200 PET部
201 PET検出部
202 画像生成部
203 第1支持アーム
204 第1制御部
205 第2支持アーム
206 第2制御部
300 補正係数算出部
400 治療計画部
401 補正係数算出部
402 補正係数記憶部
403 補正係数データセット照合部
【特許請求の範囲】
【請求項1】
天板に載置された被検体に向けて粒子線を照射する粒子線照射手段と、
前記粒子線照射手段によって照射されることで前記被検体から発生するガンマ線を検出素子にて検出するPET検出手段と、
前記天板および前記PET検出手段を前記照射に応じて移動させる移動手段と、
前記被検体について作成された減弱マップの原点と前記PET検出手段の検出素子との相対的な位置関係を示す位置情報を、前記移動手段によって移動される前記天板および前記PET検出手段の移動量を用いて算出する位置情報算出手段と、
前記位置情報算出手段によって算出された位置情報を用いて補正係数を算出する補正係数算出手段と、
前記PET検出手段によって検出されたガンマ線と前記補正係数算出手段によって算出された補正係数とを用いて画像を生成する画像生成手段と
を備えたことを特徴とする粒子線治療装置。
【請求項2】
前記位置情報算出手段は、前記天板および前記PET検出手段が移動される毎に前記位置情報を算出し、
前記補正係数算出手段は、前記天板および前記PET検出手段が移動される毎に前記位置情報算出手段によって算出された位置情報を用いて補正係数を算出し、
前記画像生成手段は、前記PET検出手段によって検出されたガンマ線と、前記天板および前記PET検出手段が移動される毎に前記補正係数算出手段によって算出された補正係数とを用いて画像を生成することを特徴とする請求項1に記載の粒子線治療装置。
【請求項3】
前記位置情報算出手段は、前記位置情報を、前記天板および前記PET検出手段の移動量を用いて予め算出し、
前記補正係数算出手段は、前記補正係数を、前記位置情報算出手段によって予め算出された位置情報を用いて予め算出するものであって、
前記粒子線治療装置は、
前記補正係数算出手段によって予め算出された補正係数と、当該算出に用いられた前記天板および前記PET検出手段の移動量とを対応づけて記憶する補正係数記憶手段と、
前記移動手段によって移動される前記天板および前記PET検出手段の移動量を用いて前記補正係数記憶手段を参照し、当該移動量に対応づけて記憶されている補正係数を取得する補正係数取得手段とをさらに備え、
前記画像生成手段は、前記PET検出手段によって検出されたガンマ線と、前記補正係数取得手段によって取得された補正係数とを用いて画像を生成することを特徴とする請求項1に記載の粒子線治療装置。
【請求項1】
天板に載置された被検体に向けて粒子線を照射する粒子線照射手段と、
前記粒子線照射手段によって照射されることで前記被検体から発生するガンマ線を検出素子にて検出するPET検出手段と、
前記天板および前記PET検出手段を前記照射に応じて移動させる移動手段と、
前記被検体について作成された減弱マップの原点と前記PET検出手段の検出素子との相対的な位置関係を示す位置情報を、前記移動手段によって移動される前記天板および前記PET検出手段の移動量を用いて算出する位置情報算出手段と、
前記位置情報算出手段によって算出された位置情報を用いて補正係数を算出する補正係数算出手段と、
前記PET検出手段によって検出されたガンマ線と前記補正係数算出手段によって算出された補正係数とを用いて画像を生成する画像生成手段と
を備えたことを特徴とする粒子線治療装置。
【請求項2】
前記位置情報算出手段は、前記天板および前記PET検出手段が移動される毎に前記位置情報を算出し、
前記補正係数算出手段は、前記天板および前記PET検出手段が移動される毎に前記位置情報算出手段によって算出された位置情報を用いて補正係数を算出し、
前記画像生成手段は、前記PET検出手段によって検出されたガンマ線と、前記天板および前記PET検出手段が移動される毎に前記補正係数算出手段によって算出された補正係数とを用いて画像を生成することを特徴とする請求項1に記載の粒子線治療装置。
【請求項3】
前記位置情報算出手段は、前記位置情報を、前記天板および前記PET検出手段の移動量を用いて予め算出し、
前記補正係数算出手段は、前記補正係数を、前記位置情報算出手段によって予め算出された位置情報を用いて予め算出するものであって、
前記粒子線治療装置は、
前記補正係数算出手段によって予め算出された補正係数と、当該算出に用いられた前記天板および前記PET検出手段の移動量とを対応づけて記憶する補正係数記憶手段と、
前記移動手段によって移動される前記天板および前記PET検出手段の移動量を用いて前記補正係数記憶手段を参照し、当該移動量に対応づけて記憶されている補正係数を取得する補正係数取得手段とをさらに備え、
前記画像生成手段は、前記PET検出手段によって検出されたガンマ線と、前記補正係数取得手段によって取得された補正係数とを用いて画像を生成することを特徴とする請求項1に記載の粒子線治療装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−279602(P2010−279602A)
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願番号】特願2009−136178(P2009−136178)
【出願日】平成21年6月5日(2009.6.5)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願日】平成21年6月5日(2009.6.5)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]