
粒子線照射システム
【課題】回転ガントリーと複数の自由度を持った患者カウチを使用していかなる方向から荷電粒子線を患者に照射する場合でも、荷電粒子線の作る照射野を精度良く測定する。
【解決手段】粒子線を生成させる粒子線発生装置101と、粒子線を照射対象に出射する照射装置104と、照射対象を保持するカウチ106と、照射対象から発生する即発ガンマ線を検出するガンマ線検出器とを備え、カウチ106にガンマ線検出器を備えることによって上記課題を解決することができる。
【解決手段】粒子線を生成させる粒子線発生装置101と、粒子線を照射対象に出射する照射装置104と、照射対象を保持するカウチ106と、照射対象から発生する即発ガンマ線を検出するガンマ線検出器とを備え、カウチ106にガンマ線検出器を備えることによって上記課題を解決することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒子線照射システムに係り、特に荷電粒子ビームを腫瘍等の患部に照射する荷電粒子ビーム照射システムに関する。
【背景技術】
【0002】
がん患者に対して陽子線などの荷電粒子線を照射することで、がんを治療する方法が知られている。治療に用いるシステムは、荷電粒子線発生装置,ビーム輸送系、及び治療室を備えている。荷電粒子線発生装置で加速された荷電粒子線は、ビーム輸送系を経て治療室の照射装置に達し、照射装置により分布を拡大し、患者の体内で患部形状に適した荷電粒子線の照射野を形成する。その際、照射野が所望の位置に形成されたことを確認する手段として、特許文献1のように、照射野内に生成する陽電子放出核種からのガンマ線を、照射後にポジトロン断層法(PET)を用いて撮影する方法が用いられている。
【0003】
また同様に、照射野内で生成される励起した炭素・酸素・窒素原子核から発生するガンマ線(即発ガンマ線)を観測することで、照射野を確認する方法が提唱されている(非特許文献1)。
【0004】
【特許文献1】特開平9−189769号公報
【非特許文献1】APPLIED PHYSICS LETTER 89,183517 (2006)「Prompt gamma measurements for locating the dose falloff region in the proton therapy」
【発明の開示】
【発明が解決しようとする課題】
【0005】
粒子線治療システムにおける従来のPETを使用した照射野測定法は、照射治療後に患者を治療室からガンマ線測定を行うPET検査室まで移動させる必要があるため、患者拘束時間の増加を招き、患者の負担となっていた。加えて治療からガンマ線測定までに時間差が生じるため、生成した陽電子放出核種が生理現象によって照射野と異なる位置に移動してしまい、高精度な照射野の確認を困難にしていた。また特に陽子線治療の場合においては、照射野の最も深い位置に到達する陽子が、陽電子放出核種を生成する核反応を起こすための十分なエネルギーを持たないなどの理由から、荷電粒子線の照射方向に対する患者体内の照射野最深部(以下、荷電粒子の飛程終端と略す)付近を精度良く測定することは困難であった。
【0006】
即発ガンマ線を用いて照射野を確認する場合、より高い精度で照射野を確認するために、ガンマ線検出器を可能な限り患者患部に近づける必要がある。さらに荷電粒子線の飛程終端付近を精度良く測定するために、治療計画システムによって患者治療前に計算された飛程終端の、照射野形成装置に対する荷電粒子線入射軸(以下、ビーム軸と略す)上への射影点と、ガンマ線検出器のガンマ線有感面中心を結ぶ直線が、ビーム軸と垂直になるように、ガンマ線検出器を設置することが好ましい。よって回転ガントリーと複数の自由度を持った患者カウチを使用して、荷電粒子線を様々な方向から患者に照射する場合、そのつどガンマ線検出器を配置し直す手段が必要であるが、未だその方法は発明されていない。本発明の目的は、回転ガントリーと複数の自由度を持った患者カウチを使用していかなる方向から荷電粒子線を患者に照射する場合でも、荷電粒子線の作る照射野を精度良く測定する粒子線照射システムを提供することにある。
【課題を解決するための手段】
【0007】
上記した目的を達成する本発明の特徴は、粒子線を生成させる粒子線発生装置と、粒子線を照射対象に出射する照射装置と、照射対象を保持するカウチと、照射対象から発生する即発ガンマ線を検出するガンマ線検出器とを備え、カウチにガンマ線検出器を備えたことにある。
【発明の効果】
【0008】
本発明によれば、荷電粒子線を患者に照射する場合、荷電粒子線の作る照射野を精度良く測定することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の好適な実施形態である粒子線照射システムについて説明する。
【実施例1】
【0010】
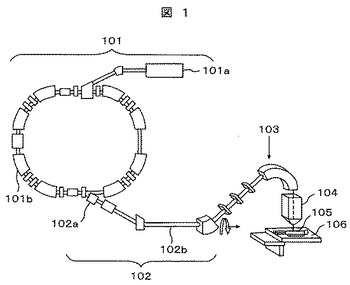
本実施例では、粒子線治療システムの1種である陽子線治療装置を例に、図1を用いて説明する。陽子線治療装置は、陽子線発生装置101,ビーム輸送装置102および回転式照射装置103を有する。回転式照射装置103は、回転ガントリー(図示せず)及び照射野形成装置(以下、照射ノズルと略す)104を有する。照射ノズル104は、回転ガントリーに設置され、回転ガントリーの回転と共に回転する。陽子線発生装置101は、イオン源(図示せず)、前段加速器(例えば直線加速器)101a及びシンクロトロン101bを有する。イオン源で発生した陽子イオンは、前段加速器101aで加速される。前段加速器101aから出射された陽子線は、シンクロトロン101bで所定のエネルギーまで加速された後、出射用デフレクタ102aからビーム輸送装置102のビーム経路102bに出射される。この陽子線は、ビーム経路102bを経て回転式照射装置103に導かれ、患者カウチ106上に横たわる被検体(照射対象である患者)105のがん患部に照射される。ビーム経路102の一部は、回転ガントリーに取り付けられている。なお本実施例では、例として陽子線治療装置を用いたが、重粒子線等を用いた他粒子線治療システムに対しても同様の効果を得る事が可能である。さらにまた本実施例では、陽子線発生装置101取り付けられる加速器としてシンクロトロンを用いたが、サイクロトロンやライナックなどといったその他の荷電粒子線加速器でも同等の効果を得る事ができる。
【0011】
次に、図2を用いて患者カウチ106の働きについて説明する。患者カウチ106は、治療中に患者が横たわる寝台106aと、寝台106aを様々な位置・角度にアライメントするための可動部群からなる。それぞれ異なる自由度をもった可動部が、高精度のステッピングモーター(図示せず)を用いて精密に可動することにより、寝台106aに横たわった患者の患部位置が、陽子線照射にもっとも適した位置・陽子線照射方向に対する角度に固定される。
【0012】
同様に図2を用いて、患者カウチ106の各可動部群の働きについて説明する。患者カウチ106の、陽子線治療中に患者が横たわる寝台106aに設置された可動部106bは、同様に可動部106bに対して寝台106aの反対側に設置される固定部108に対して、軸107aを中心に回転できる自由度を持っており、モーターを用いて寝台106aを、軸107aに対して任意の角度まで回転,固定させることができる。可動部106cは、隣接して設置される可動部106dに対して軸107bを中心に回転できる自由度を持っており、モーターを用いて寝台106aを軸107bを中心に任意の角度まで回転,固定させることができる。可動部106dは、固定部108を軸107cを中心に回転できる自由度を持ち、モーターを用いて寝台106aを、軸107aと軸107cの作る平面に対して最適な角度に傾ける事ができる。可動部106eは、隣接して設置される可動部106fに対して軸107aと平行に水平移動できる自由度を持ち、モーターを用いて寝台106aを軸107aに対して平行に水平移動させることができる。可動部106fは、軸107bと平行に伸縮できる機構を持ち、モーターを用いて寝台106aを軸107bに対して平行に垂直移動させることができる。可動部106gは軸107cと平行に患者カウチ106全体を水平移動させる機構を持ち、モーターを用いて寝台106aを軸107cに対して平行に水平移動させることができる。
【0013】
各可動部を駆動し、患者カウチ106に取り付けられた寝台106aを最適な位置・角度にアライメントする場合には、治療計画システム(図示せず)と患者位置決め制御システム(図示せず)を用いる。操作者は、患者の体内で患部形状に適した荷電粒子線の照射野形成が十分可能になるように、治療計画システムが計算した陽子線の照射野を確認しながら、患者カウチ106位置決めの基本となる患者カウチ106の位置・角度といったアライメント情報を治療計画に設定する。またこのとき、回転ガントリーの回転角情報,患者ボーラス形状等といった照射パラメータ情報も、同様に治療計画に設定される。
【0014】
設定された患者カウチ106のアライメント情報は、ケーブルなどの通信機器を通して、治療計画システムから患者位置決め制御システムに渡される。患者位置決め制御システムは、治療計画から得られた情報にしたがって、患者カウチ106の各可動部の駆動力であるステッピングモーターにそれぞれ規定の電流を送り、治療計画で定めた患者カウチ106のアライメントが達成されるように、規定の位置・角度まで各可動部を可動させる。
【0015】
さらに治療室内に取り付けられた位置決め用画像取得装置(図示せず)によって、患者カウチ106上に横たわる患者の患部形状透視画像が撮影される。得られた透視画像情報は患者位置決め制御システムに渡される。患者位置決め制御システムは、透視画像情報を基にして、患者患部が治療計画で設定された陽子線の照射位置に正確に一致するように、再度患者カウチ106アライメントの微調整を行う。
【0016】
次に、治療を受けた患者体内の陽子線照射野を、ガンマ線検出器によって確認する原理について説明する。高いエネルギーの粒子線(本実施形態では、陽子線)が物質に入射すると、物質中の原子核を陽子線が励起し、陽子線の照射野上にガンマ崩壊を起こす放射性核種を多種生成する。生成された放射性核種は核種ごとに決まった半減期で崩壊し、数MeV(1MeVから10MeV)といった高いエネルギーのガンマ線を放射する。このガンマ線を即発ガンマ線という。放射性核種から放射された即発ガンマ線は、ただちに物質の外部へ透過する。よって物質外部に設置したガンマ線検出器で物質内部から透過した即発ガンマ線を検出し、ガンマ線検出器から出力される検出データに基づいて、照射野確認システム(図示せず)が、ガンマ線の発生した物質中での位置を見積もることで、物質中における陽子線の照射野を測定すること事ができる。即ち、ガンマ線検出器を用いて陽子線治療中に患者体内から発生する即発ガンマ線を検出し、検出データに基づいて照射野確認システムが、ガンマ線のエネルギー、ガンマ線検出器での入射位置・角度、計数率を測定すると、陽子線治療を受けた患者体内の照射野を確認する事ができる。励起状態の核から放出されるエネルギーが、1MeVから10MeVであることから、照射野確認システムは、検出データのうち、ガンマ線のエネルギーが1MeVから10MeVのものを有効なデータと判別し、照射野を確認してもよい。
【0017】
ガンマ線検出器には、特に数百keV〜数十MeVといった高いエネルギーのガンマ線を測定できるものが適している。本実施例では、ガンマ線のコンプトン散乱を利用することで高エネルギーガンマ線の検出を可能にし、検出器有感面でのガンマ線の入射位置・角度、エネルギーを測定する事ができるコンプトンカメラを、ガンマ線検出器として使用する。ただし、高エネルギーガンマ線の測定が可能ならば、コンプトンカメラ以外の他の放射線検出器でも本発明は適応できる。
【0018】
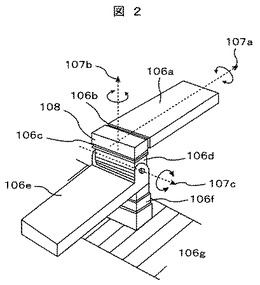
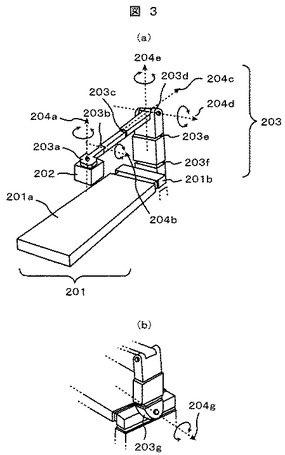
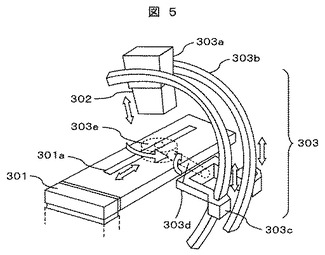
次に、本実施例の特徴的なシステムについて具体的に説明する。図3に示すように、陽子線治療中に患者が横たわる患者カウチ201にはガンマ線検出器設置器具(検出器固定装置)203が設置されている。図3(a)は、ガンマ線検出器設置器具203を、患者カウチ201の寝台201a側から見た図で、図3(b)はその逆側からガンマ線検出器設置器具203を見た図である。ガンマ線検出器設置器具203の先端にはガンマ線検出器202が取り付けてある。前述のように、より高い精度で陽子線の作る患者体内の照射野を確認するために、ガンマ線検出器202は即発ガンマ線源、すなわち患者にできるだけ近づける必要がある。
【0019】
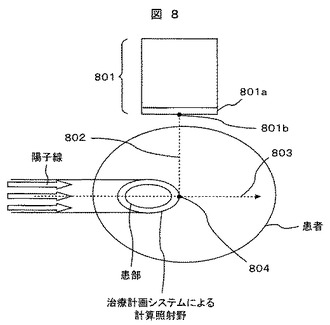
また図8に示すように、特に陽子線の飛程終端付近を精度良く測定するために、治療計画システムによって計算された飛程終端のビーム軸803上への射影点804と、ガンマ線検出器801のガンマ線有感面801aにおける有感面中心801bを結ぶ直線802が、ビーム軸803と垂直になるように、ガンマ線検出器801が設置される必要がある。
【0020】
以上を考慮して、図3のガンマ線検出器設置器具203には、可動部203a,203b,203c,203d,203e,203f,203gが備わる。ガンマ線検出器202に取り付けられた可動部203aは、軸204aを中心に回転できる自由度を持っており、ステッピングモーター等の駆動力(図示せず)を用いて、軸204aを中心にして自由に任意の角度までガンマ線検出器202を回転させる事ができる。可動部203bは、軸204bを中心に回転できる自由度を持っており、動力を用いて軸204bを中心にして自由に任意の角度までガンマ線検出器202を回転させる事ができる。可動部203bは、ガンマ線検出器202に対して類似の自由度を持つ可動部203d(後述)の機能と比較して、寝台201aに横たわる患者に対するガンマ線検出器202の向きや角度を微調整する場合に用いる。可動部203cは、軸204cにそって水平に伸縮できる機構及び動力を備えており、ガンマ線検出器202を軸204cに沿って水平移動させることができる。可動部203dは、軸204dを中心に回転できる自由度を持っており、動力を用いて軸204dを中心にして自由に任意の角度までガンマ線検出器202を回転させる事ができる。可動部203dは、ガンマ線検出器202に対して類似の自由度を持つ可動部203b(前述)の機能と比較して、ガンマ線検出器202を大角度に回転させる場合に用いる。可動部203eは、軸204e方向に沿って水平に伸縮できる機構及び動力を備えており、ガンマ線検出器202を地面に対して垂直に上下させることができる。可動部203eのはたらきにより、ガンマ線検出器202を、寝台201aに横たわる患者に対して遠ざけたり近づけたりすることができる。可動部203fは、軸204eを中心に回転できる自由度を持っており、動力を用いて軸204eを中心にして自由に任意の角度までガンマ線検出器202を回転させることができる。可動部203gは、寝台201aを軸204g中心に回転させる患者カウチの可動部201bに取り付けられている。可動部203gは軸204gを中心に回転できる自由度を持っており、動力を用いて軸204gを中心にして自由に任意の角度までガンマ線検出器202を回転する事ができる。
【0021】
これらガンマ線検出器設置器具203の各可動部の働きにより、回転ガントリー,照射ノズル104,患者カウチ201が患者の治療のために稼動した場合にも、治療を妨げることなく、かつ陽子線の照射野と、飛程終端付近をより高い精度で検出できる位置に、ガンマ線検出器202を設置する事ができる。
【0022】
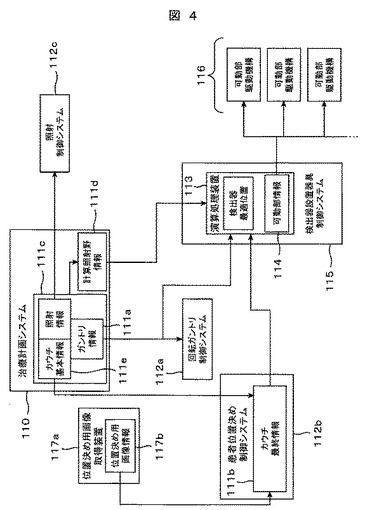
次に、ガンマ線検出器設置器具203の各可動部を規定量駆動させ、ガンマ線検出器202を最適な位置に配置するための制御システムについて、図4を用いて説明する。患者体内の患部形状に最適な陽子線照射野を形成するために、操作者が治療計画システム110を用いて回転ガントリー情報(回転角情報)111a,患者カウチ201位置決めの基本となる患者カウチ情報(アライメント情報)111b,照射パラメータ情報111cを決定すると、前述のように陽子線の照射野が計算され、計算照射野情報111dが得られる。
【0023】
治療準備が開始されると、照射パラメータ情報111cを受けて製作された治療に最適な形状の患者ボーラスなどが照射ノズルに設置される。さらに陽子線を拡散させる散乱体厚み設定、加速器の運転パターン設定,照射ノズル内の走査電磁石の励磁パターン設定等といった照射パラメータの設定が、治療計画システム110から照射パラメータ情報111cを受け取った照射制御システム112cによって行われる。回転ガントリー情報111aは治療計画システム110から回転ガントリー制御システム112aに渡され、回転ガントリー制御システム112aに従って、治療計画システム110が定める規定回転角になるように回転ガントリーが回転する。また前述のように、患者カウチ201の位置決めの基本となるアライメント情報111eが患者位置決め制御システム(カウチ制御システム)112bに渡され、患者位置決め制御システム112bの制御に従って患者カウチ201の各可動部モーターが駆動し、患者が横たわる寝台が治療計画システム110の定める規定の位置・角度に設置されるように、患者カウチ201をアライメントする。
【0024】
次に、さらに詳細な患者カウチ201の位置決めを行うために、治療室内に取り付けられた位置決め画像用取得装置117aによって患者患部の透視画像の撮影が行われる。このとき、操作者は検出器設置器具の各可動部の駆動制御を行う検出器設置器具制御システム115を用いて、位置決め用画像取得装置117aの患者患部透視画像撮影の妨げにならない位置にガンマ線検出器202が設置されるよう、ガンマ線検出器設置器具203をアライメントする。
【0025】
患者患部の透視画像が撮影されると、得られた透視画像情報117bは患者位置決め制御システム112bに渡される。患者位置決め制御システム112bは、透視画像情報117bを基に患者患部が治療計画システム110で計算された陽子線の照射位置に正確に一致するように、患者カウチ201のアライメントの微調整を行う。
【0026】
患者カウチ201のアライメント調整が終了すると、患者カウチ201の最終的な患者カウチ情報111bが、患者位置決め制御システム112bから検出器設置器具制御システム115内の演算処理装置113に渡される。このとき、回転ガントリー情報111aと治療計画システム110による計算照射野情報111dの情報も、治療計画システム110から演算処理装置113に渡される。
【0027】
演算処理装置113は、回転ガントリー情報111a,患者カウチの患者カウチ情報111b,計算照射野情報111dの3つの情報を用いて、治療計画システム110によって事前に計算された陽子線飛程終端のビーム軸上への射影点と、ガンマ線検出器202のガンマ線有感面中心を結ぶ直線が、ビーム軸と垂直を作り、かつできるだけガンマ線検出器202を患者に近づけることができるガンマ線検出器202の設置位置、すなわち前述の、より高い精度で陽子線飛程終端付近を測定することができる、患者カウチ201上におけるガンマ線検出器202の3次元位置を計算する。さらに演算処理装置113は、ガンマ線検出器設置器具203の各可動部が持つ自由度から、ガンマ線検出器202を前述の3次元位置に設置させることのできる各可動部ごとの規定駆動量情報(可動量情報)114の計算を行う。
【0028】
検出器設置器具制御システム115は、演算処理装置113によって計算された各可動部ごとの規定駆動量情報114に従ってガンマ線検出器設置器具203の各可動部駆動機構116を動作し、ガンマ線検出器設置器具203をアライメントする。このような制御を用いて、ガンマ線検出器202のアライメントが行われる。
【0029】
また検出器設置器具制御システム115もしくは治療計画システム110を用いて、可動部駆動機構116の規定駆動量情報114を各可動部ごとに直接入力し、手動でガンマ線検出器設置器具203をアライメントすることができる。
【0030】
さらに規定駆動量情報114は、検出器設置器具制御システム115に備えられた記録媒体(図示せず)内に保持され、記録媒体のフォーマットおよび記録媒体に記録されたデータの消去を行わない限りは、記録媒体に保持された複数の規定可動量情報114に関して何度でも選択して可動部を再アライメントすることができる。記録媒体に記録された規定可動量情報114データの消去及び選択は、検出器設置器具制御システム115上または治療計画システム110から行う。
【0031】
ガンマ線検出器を患者カウチに設置する例の手段として、図5のような構成も考えられる。図5のガンマ線検出器設置器具(検出器固定装置)303は、患者カウチ301を囲むような構造になっている。ガンマ線検出器設置器具303には、ある一定の半径の円の円周上を沿う2本の半環状のレール303bが、二又形状のレール取り付け具303cに設置されている。レール取り付け具303cには、取り付けられた2本のレール303bを同時に連動して可動させる動力が備わっており、各レール303bを患者カウチ301に対して垂直方向、すなわちレール303bの円周方向に回転させる事ができる。レール303bの先端部には、2本のレール303bに挟まれる形で、検出器治具303aが取り付けられている。検出器治具303aはレール303bから取り外すことが可能で、レール303b上の任意の別位置に設置できる。検出器治具303aには、ガンマ線検出器302がガンマ線有感面を患者方向に向けた状態で設置される。また検出器治具303aには、ガンマ線検出器302をレール303bの円周方向に対して垂直にある範囲で上下させる動力機構が備わっており、患者に対してガンマ線検出器302を近づけたり遠ざけたりすることができる。レール取り付け具303cは、可動部303dに接続されている。可動部303dは患者カウチ301に対して垂直方向に回転できる自由度を持っており、動力を用いて患者カウチ301に対して任意の角度にレール303bを傾けることができる。患者カウチ301とガンマ線検出器設置器具303の接点である可動部303eは、患者カウチ301に対して水平方向に回転できる自由度を持っており、動力を用いることで、患者カウチ301に対して水平にガンマ線検出器設置器具303を回転させることができる。さらに可動部303eは患者カウチ301の患者が横たわる方向に対して水平に移動できる自由度を備えており、動力を用いることで、患者カウチに301に対してガンマ線検出器設置器具303を水平移動させることができる。これらガンマ線検出器設置器具303の各可動部の働きにより、回転ガントリー,照射ノズル104,患者カウチ301が患者の治療のために可動した場合にも、治療の妨げにならないように、陽子線照射野と、陽子線の最大到達深度付近をよりよい精度で検出できる位置に、ガンマ線検出器302を設置する事ができる。
【0032】
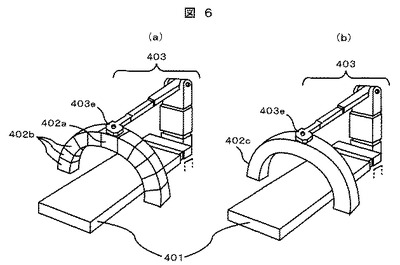
検出器設置器具を介して患者カウチに取り付けられるガンマ線検出器は、単体で用いるだけでなく、検出器設置器具上に複数取り付けて使用できる。図3で説明した患者カウチに、複数のガンマ線検出器を設置した構成図を、図6(a)に示す。ガンマ線検出器設置器具(検出器固定器具)403の可動部403aに取り付けられたガンマ線検出器402aの両脇に接続する形で、複数のガンマ線検出器402bがある一定の半径の円周上に配置されている。環状に複数のガンマ線検出器402a,402bを配置することで、ガンマ線検出器402a,402bは、陽子線治療中の患者周囲を覆うことができる、よって患者体内から飛来する即発ガンマ線を一度に効率よく検出する事ができる。ガンマ線検出器設置器具403は、図3のガンマ線検出器設置器具303と同様に各部が可動であり、回転ガントリー,照射ノズル104,患者カウチ401が患者の治療のために可動した場合にも、治療を妨げることなく、陽子線照射野と、陽子線の最大到達深度付近をよりよい精度で検出できる位置に、ガンマ線検出器402a,402bを設置する事ができる。
【0033】
また、ガンマ線検出器を患者カウチに設置する他の例を図6(b)を用いて、説明する。図6(b)のように、患者カウチを覆う検出器面を持った大型の環状ガンマ線検出器402cを、ガンマ線検出器設置器具403を介して患者カウチ401に取り付けることで、図6(a)の複数のガンマ線検出器402a,402bを患者カウチ401に取り付けた場合と同様の効果を得られる。本実施例では、ガンマ線検出器402cをある半径の円の円周上を覆う環状構造としたが、回転ガントリー,照射ノズル104,患者カウチ401が患者の治療のために可動した場合に、ガンマ線検出器402a,402b及び402cが、前述の陽子線照射野の確認に最適な位置に設置され、かつ患者を覆うことが出来るならば、どのようなガンマ線検出器402a,402bの接続方法及びガンマ線検出器402cの形状でも適応可能である。
【0034】
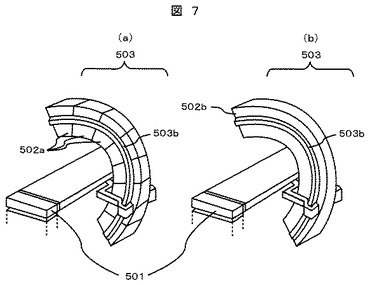
次に、図5で説明した患者カウチに、複数のガンマ線検出器を設置した構成図を、図7(a)に示す。図7(a)のように、ガンマ線検出器設置器具(検出器固定装置)503のレール503b上に、複数のガンマ線検出器502aが、ガンマ線有感面を患者カウチ501に向けた状態で取り付けられる。半環状のレール503bは、ある半径の円の円周上を沿っているため、取り付けられた複数のガンマ線検出器502aは、図6の場合と同様に、患者体内から飛来する即発ガンマ線を一度に効率よく検出する事ができる。ガンマ線検出器設置器具503は図5のガンマ線検出器設置器具303と同様に各部可動であり、回転ガントリー,照射ノズル104,患者カウチ501が患者の治療のために可動した場合にも、治療の邪魔をすることなく、陽子線照射野と、陽子線の最大到達深度付近をよりよい精度で検出できる位置に、ガンマ線検出器502aを設置する事ができる。また図7(b)のように、ある半径の円の円周に沿うように、環状の大型ガンマ線検出器502bをレール503bに取り付けることで、複数のガンマ線検出器502aをレール503bに取り付けた図7(a)の場合と、同様の効果を得られる。
【実施例2】
【0035】
陽子線治療システムの品質管理のために、治療時間外に、水ファントム(図示せず)内での陽子線の照射野を確認する必要がある。従来の確認方法は、水ファントムへの陽子線照射中に水ファントム内でピンポイントチェンバー(図示せず)を走査し、水ファントム内部の線量分布を測定する方法だったが、精度の高い照射野測定を行うためにはピンポイントチェンバーを水ファントム内で細かく走査する必要があり、非常に時間がかかっていた。
【0036】
患者体内の陽子線飛程測定と同様の原理で、患者カウチ上に設置した水ファントム内における陽子線の照射野を確認する事が出来る。ガンマ線検出器を用いた方法では、水ファントム外部から即発ガンマ線を測定することによってすばやく陽子線照射野を見積もる事ができ、陽子線治療における品質管理時間の割合を、従来のピンポイントチェンバーを用いた線量分布測定に比べて大幅に短縮する事が期待される。
【0037】
実施例1および2によれば、回転ガントリーや複数の自由度を持った患者カウチを使用して様々な方向から荷電粒子線を患者に照射する場合においても、ガンマ線検出器を患者の近くに配置し、さらに、治療計画によって患者治療前に計算された荷電粒子線飛程終端のビーム軸上への射影点と、ガンマ線検出器のガンマ線有感面中心を結ぶ直線が、ビーム軸と垂直になるようにガンマ線検出器を配置することができる。よって、回転ガントリーと複数の自由度を持った患者カウチを使用していかなる方向から荷電粒子線を患者に照射する場合でも、荷電粒子線の作る照射野を精度良く測定することができる。
【0038】
実施例1及び2は、荷電粒子線の照射治療中に、患者体内の荷電粒子線照射野を確認するためのデータを測定する事ができるため、従来のPETを用いた照射野測定法と比較して治療時間を減らすことができ、患者の負担を低減することができる。
【0039】
実施例1及び2は、荷電粒子線として陽子線や重粒子線(炭素線等)を用いることができる。即発ガンマ線を検出して照射野の形状を測定する実施例1及び2は、特に、陽子線を用いる陽子線照射システムの場合に有効である。
【0040】
実施例1及び2は、荷電粒子線を照射している間に、照射対象から放出される即発ガンマ線を検出し、照射野の形状を測定するのに必要な情報を収集できるため、患者105の生理現象による位置ずれが小さく、精度よく照射野の形状を測定することができる。また、照射野の形状を測定する時間を短縮でき、スループットが向上する。
【図面の簡単な説明】
【0041】
【図1】本発明の好適な一実施例である陽子線治療システムの構成図である。
【図2】図1に示す患者カウチの、構成図である。
【図3】図2に示す患者カウチに、取り付けられる検出器設置器具の構成図である。
【図4】図3に示す検出器設置器具の、駆動制御システムの構成図である。
【図5】図2に示す患者カウチに、取り付けられる検出器設置器具の構成図である。
【図6】図2に示す検出器設置器具の、構成図である。
【図7】図5に示す検出器設置器具の、構成図である。
【図8】図3に示したガンマ線検出器における、最適な設置位置の構成図である。
【符号の説明】
【0042】
101 陽子線発生装置
101a 前段加速器
101b シンクロトロン
102 ビーム輸送装置
102a 出射用デフレクタ
102b ビーム径路
103 回転式照射装置
104 照射野形成装置
105 患者
106,201,301 患者カウチ
106a,201a 寝台
106b,106c,106d,106e,106f,106g,203a,203b,203c,203d,203e,203f,203g,303d,303f,403e 可動部
107a,107b,107c,204a,204b,204c,204d,204e,204f 軸
108 固定部
110 治療計画システム
111a 回転ガントリー情報
111b 患者カウチ情報
111c 照射パラメータ情報
111d 計算照射野情報
112a 回転ガントリー制御システム
112b 患者位置決め制御システム
112c 照射制御システム
113 演算処理装置
114 駆動量情報
115 検出器設置器具制御システム
116 可動部駆動機構
201b 患者カウチ可動部
202,302,402a,402b,502a,801 ガンマ線検出器
203 ガンマ線検出器設置器具
301a 患者カウチ溝
303,403,503 ガンマ線検出器設置器具
303a 検出器治具
303b,503b レール
303c レール取り付け具
303e 検出器設置器具基盤
401,501 患者カウチ
402c ガンマ線検出器
801a ガンマ線有感面
801b 有感面中心
802 直線
803 ビーム軸
804 治療計画システムの計算による飛程終端のビーム軸上射影点
【技術分野】
【0001】
本発明は、粒子線照射システムに係り、特に荷電粒子ビームを腫瘍等の患部に照射する荷電粒子ビーム照射システムに関する。
【背景技術】
【0002】
がん患者に対して陽子線などの荷電粒子線を照射することで、がんを治療する方法が知られている。治療に用いるシステムは、荷電粒子線発生装置,ビーム輸送系、及び治療室を備えている。荷電粒子線発生装置で加速された荷電粒子線は、ビーム輸送系を経て治療室の照射装置に達し、照射装置により分布を拡大し、患者の体内で患部形状に適した荷電粒子線の照射野を形成する。その際、照射野が所望の位置に形成されたことを確認する手段として、特許文献1のように、照射野内に生成する陽電子放出核種からのガンマ線を、照射後にポジトロン断層法(PET)を用いて撮影する方法が用いられている。
【0003】
また同様に、照射野内で生成される励起した炭素・酸素・窒素原子核から発生するガンマ線(即発ガンマ線)を観測することで、照射野を確認する方法が提唱されている(非特許文献1)。
【0004】
【特許文献1】特開平9−189769号公報
【非特許文献1】APPLIED PHYSICS LETTER 89,183517 (2006)「Prompt gamma measurements for locating the dose falloff region in the proton therapy」
【発明の開示】
【発明が解決しようとする課題】
【0005】
粒子線治療システムにおける従来のPETを使用した照射野測定法は、照射治療後に患者を治療室からガンマ線測定を行うPET検査室まで移動させる必要があるため、患者拘束時間の増加を招き、患者の負担となっていた。加えて治療からガンマ線測定までに時間差が生じるため、生成した陽電子放出核種が生理現象によって照射野と異なる位置に移動してしまい、高精度な照射野の確認を困難にしていた。また特に陽子線治療の場合においては、照射野の最も深い位置に到達する陽子が、陽電子放出核種を生成する核反応を起こすための十分なエネルギーを持たないなどの理由から、荷電粒子線の照射方向に対する患者体内の照射野最深部(以下、荷電粒子の飛程終端と略す)付近を精度良く測定することは困難であった。
【0006】
即発ガンマ線を用いて照射野を確認する場合、より高い精度で照射野を確認するために、ガンマ線検出器を可能な限り患者患部に近づける必要がある。さらに荷電粒子線の飛程終端付近を精度良く測定するために、治療計画システムによって患者治療前に計算された飛程終端の、照射野形成装置に対する荷電粒子線入射軸(以下、ビーム軸と略す)上への射影点と、ガンマ線検出器のガンマ線有感面中心を結ぶ直線が、ビーム軸と垂直になるように、ガンマ線検出器を設置することが好ましい。よって回転ガントリーと複数の自由度を持った患者カウチを使用して、荷電粒子線を様々な方向から患者に照射する場合、そのつどガンマ線検出器を配置し直す手段が必要であるが、未だその方法は発明されていない。本発明の目的は、回転ガントリーと複数の自由度を持った患者カウチを使用していかなる方向から荷電粒子線を患者に照射する場合でも、荷電粒子線の作る照射野を精度良く測定する粒子線照射システムを提供することにある。
【課題を解決するための手段】
【0007】
上記した目的を達成する本発明の特徴は、粒子線を生成させる粒子線発生装置と、粒子線を照射対象に出射する照射装置と、照射対象を保持するカウチと、照射対象から発生する即発ガンマ線を検出するガンマ線検出器とを備え、カウチにガンマ線検出器を備えたことにある。
【発明の効果】
【0008】
本発明によれば、荷電粒子線を患者に照射する場合、荷電粒子線の作る照射野を精度良く測定することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の好適な実施形態である粒子線照射システムについて説明する。
【実施例1】
【0010】
本実施例では、粒子線治療システムの1種である陽子線治療装置を例に、図1を用いて説明する。陽子線治療装置は、陽子線発生装置101,ビーム輸送装置102および回転式照射装置103を有する。回転式照射装置103は、回転ガントリー(図示せず)及び照射野形成装置(以下、照射ノズルと略す)104を有する。照射ノズル104は、回転ガントリーに設置され、回転ガントリーの回転と共に回転する。陽子線発生装置101は、イオン源(図示せず)、前段加速器(例えば直線加速器)101a及びシンクロトロン101bを有する。イオン源で発生した陽子イオンは、前段加速器101aで加速される。前段加速器101aから出射された陽子線は、シンクロトロン101bで所定のエネルギーまで加速された後、出射用デフレクタ102aからビーム輸送装置102のビーム経路102bに出射される。この陽子線は、ビーム経路102bを経て回転式照射装置103に導かれ、患者カウチ106上に横たわる被検体(照射対象である患者)105のがん患部に照射される。ビーム経路102の一部は、回転ガントリーに取り付けられている。なお本実施例では、例として陽子線治療装置を用いたが、重粒子線等を用いた他粒子線治療システムに対しても同様の効果を得る事が可能である。さらにまた本実施例では、陽子線発生装置101取り付けられる加速器としてシンクロトロンを用いたが、サイクロトロンやライナックなどといったその他の荷電粒子線加速器でも同等の効果を得る事ができる。
【0011】
次に、図2を用いて患者カウチ106の働きについて説明する。患者カウチ106は、治療中に患者が横たわる寝台106aと、寝台106aを様々な位置・角度にアライメントするための可動部群からなる。それぞれ異なる自由度をもった可動部が、高精度のステッピングモーター(図示せず)を用いて精密に可動することにより、寝台106aに横たわった患者の患部位置が、陽子線照射にもっとも適した位置・陽子線照射方向に対する角度に固定される。
【0012】
同様に図2を用いて、患者カウチ106の各可動部群の働きについて説明する。患者カウチ106の、陽子線治療中に患者が横たわる寝台106aに設置された可動部106bは、同様に可動部106bに対して寝台106aの反対側に設置される固定部108に対して、軸107aを中心に回転できる自由度を持っており、モーターを用いて寝台106aを、軸107aに対して任意の角度まで回転,固定させることができる。可動部106cは、隣接して設置される可動部106dに対して軸107bを中心に回転できる自由度を持っており、モーターを用いて寝台106aを軸107bを中心に任意の角度まで回転,固定させることができる。可動部106dは、固定部108を軸107cを中心に回転できる自由度を持ち、モーターを用いて寝台106aを、軸107aと軸107cの作る平面に対して最適な角度に傾ける事ができる。可動部106eは、隣接して設置される可動部106fに対して軸107aと平行に水平移動できる自由度を持ち、モーターを用いて寝台106aを軸107aに対して平行に水平移動させることができる。可動部106fは、軸107bと平行に伸縮できる機構を持ち、モーターを用いて寝台106aを軸107bに対して平行に垂直移動させることができる。可動部106gは軸107cと平行に患者カウチ106全体を水平移動させる機構を持ち、モーターを用いて寝台106aを軸107cに対して平行に水平移動させることができる。
【0013】
各可動部を駆動し、患者カウチ106に取り付けられた寝台106aを最適な位置・角度にアライメントする場合には、治療計画システム(図示せず)と患者位置決め制御システム(図示せず)を用いる。操作者は、患者の体内で患部形状に適した荷電粒子線の照射野形成が十分可能になるように、治療計画システムが計算した陽子線の照射野を確認しながら、患者カウチ106位置決めの基本となる患者カウチ106の位置・角度といったアライメント情報を治療計画に設定する。またこのとき、回転ガントリーの回転角情報,患者ボーラス形状等といった照射パラメータ情報も、同様に治療計画に設定される。
【0014】
設定された患者カウチ106のアライメント情報は、ケーブルなどの通信機器を通して、治療計画システムから患者位置決め制御システムに渡される。患者位置決め制御システムは、治療計画から得られた情報にしたがって、患者カウチ106の各可動部の駆動力であるステッピングモーターにそれぞれ規定の電流を送り、治療計画で定めた患者カウチ106のアライメントが達成されるように、規定の位置・角度まで各可動部を可動させる。
【0015】
さらに治療室内に取り付けられた位置決め用画像取得装置(図示せず)によって、患者カウチ106上に横たわる患者の患部形状透視画像が撮影される。得られた透視画像情報は患者位置決め制御システムに渡される。患者位置決め制御システムは、透視画像情報を基にして、患者患部が治療計画で設定された陽子線の照射位置に正確に一致するように、再度患者カウチ106アライメントの微調整を行う。
【0016】
次に、治療を受けた患者体内の陽子線照射野を、ガンマ線検出器によって確認する原理について説明する。高いエネルギーの粒子線(本実施形態では、陽子線)が物質に入射すると、物質中の原子核を陽子線が励起し、陽子線の照射野上にガンマ崩壊を起こす放射性核種を多種生成する。生成された放射性核種は核種ごとに決まった半減期で崩壊し、数MeV(1MeVから10MeV)といった高いエネルギーのガンマ線を放射する。このガンマ線を即発ガンマ線という。放射性核種から放射された即発ガンマ線は、ただちに物質の外部へ透過する。よって物質外部に設置したガンマ線検出器で物質内部から透過した即発ガンマ線を検出し、ガンマ線検出器から出力される検出データに基づいて、照射野確認システム(図示せず)が、ガンマ線の発生した物質中での位置を見積もることで、物質中における陽子線の照射野を測定すること事ができる。即ち、ガンマ線検出器を用いて陽子線治療中に患者体内から発生する即発ガンマ線を検出し、検出データに基づいて照射野確認システムが、ガンマ線のエネルギー、ガンマ線検出器での入射位置・角度、計数率を測定すると、陽子線治療を受けた患者体内の照射野を確認する事ができる。励起状態の核から放出されるエネルギーが、1MeVから10MeVであることから、照射野確認システムは、検出データのうち、ガンマ線のエネルギーが1MeVから10MeVのものを有効なデータと判別し、照射野を確認してもよい。
【0017】
ガンマ線検出器には、特に数百keV〜数十MeVといった高いエネルギーのガンマ線を測定できるものが適している。本実施例では、ガンマ線のコンプトン散乱を利用することで高エネルギーガンマ線の検出を可能にし、検出器有感面でのガンマ線の入射位置・角度、エネルギーを測定する事ができるコンプトンカメラを、ガンマ線検出器として使用する。ただし、高エネルギーガンマ線の測定が可能ならば、コンプトンカメラ以外の他の放射線検出器でも本発明は適応できる。
【0018】
次に、本実施例の特徴的なシステムについて具体的に説明する。図3に示すように、陽子線治療中に患者が横たわる患者カウチ201にはガンマ線検出器設置器具(検出器固定装置)203が設置されている。図3(a)は、ガンマ線検出器設置器具203を、患者カウチ201の寝台201a側から見た図で、図3(b)はその逆側からガンマ線検出器設置器具203を見た図である。ガンマ線検出器設置器具203の先端にはガンマ線検出器202が取り付けてある。前述のように、より高い精度で陽子線の作る患者体内の照射野を確認するために、ガンマ線検出器202は即発ガンマ線源、すなわち患者にできるだけ近づける必要がある。
【0019】
また図8に示すように、特に陽子線の飛程終端付近を精度良く測定するために、治療計画システムによって計算された飛程終端のビーム軸803上への射影点804と、ガンマ線検出器801のガンマ線有感面801aにおける有感面中心801bを結ぶ直線802が、ビーム軸803と垂直になるように、ガンマ線検出器801が設置される必要がある。
【0020】
以上を考慮して、図3のガンマ線検出器設置器具203には、可動部203a,203b,203c,203d,203e,203f,203gが備わる。ガンマ線検出器202に取り付けられた可動部203aは、軸204aを中心に回転できる自由度を持っており、ステッピングモーター等の駆動力(図示せず)を用いて、軸204aを中心にして自由に任意の角度までガンマ線検出器202を回転させる事ができる。可動部203bは、軸204bを中心に回転できる自由度を持っており、動力を用いて軸204bを中心にして自由に任意の角度までガンマ線検出器202を回転させる事ができる。可動部203bは、ガンマ線検出器202に対して類似の自由度を持つ可動部203d(後述)の機能と比較して、寝台201aに横たわる患者に対するガンマ線検出器202の向きや角度を微調整する場合に用いる。可動部203cは、軸204cにそって水平に伸縮できる機構及び動力を備えており、ガンマ線検出器202を軸204cに沿って水平移動させることができる。可動部203dは、軸204dを中心に回転できる自由度を持っており、動力を用いて軸204dを中心にして自由に任意の角度までガンマ線検出器202を回転させる事ができる。可動部203dは、ガンマ線検出器202に対して類似の自由度を持つ可動部203b(前述)の機能と比較して、ガンマ線検出器202を大角度に回転させる場合に用いる。可動部203eは、軸204e方向に沿って水平に伸縮できる機構及び動力を備えており、ガンマ線検出器202を地面に対して垂直に上下させることができる。可動部203eのはたらきにより、ガンマ線検出器202を、寝台201aに横たわる患者に対して遠ざけたり近づけたりすることができる。可動部203fは、軸204eを中心に回転できる自由度を持っており、動力を用いて軸204eを中心にして自由に任意の角度までガンマ線検出器202を回転させることができる。可動部203gは、寝台201aを軸204g中心に回転させる患者カウチの可動部201bに取り付けられている。可動部203gは軸204gを中心に回転できる自由度を持っており、動力を用いて軸204gを中心にして自由に任意の角度までガンマ線検出器202を回転する事ができる。
【0021】
これらガンマ線検出器設置器具203の各可動部の働きにより、回転ガントリー,照射ノズル104,患者カウチ201が患者の治療のために稼動した場合にも、治療を妨げることなく、かつ陽子線の照射野と、飛程終端付近をより高い精度で検出できる位置に、ガンマ線検出器202を設置する事ができる。
【0022】
次に、ガンマ線検出器設置器具203の各可動部を規定量駆動させ、ガンマ線検出器202を最適な位置に配置するための制御システムについて、図4を用いて説明する。患者体内の患部形状に最適な陽子線照射野を形成するために、操作者が治療計画システム110を用いて回転ガントリー情報(回転角情報)111a,患者カウチ201位置決めの基本となる患者カウチ情報(アライメント情報)111b,照射パラメータ情報111cを決定すると、前述のように陽子線の照射野が計算され、計算照射野情報111dが得られる。
【0023】
治療準備が開始されると、照射パラメータ情報111cを受けて製作された治療に最適な形状の患者ボーラスなどが照射ノズルに設置される。さらに陽子線を拡散させる散乱体厚み設定、加速器の運転パターン設定,照射ノズル内の走査電磁石の励磁パターン設定等といった照射パラメータの設定が、治療計画システム110から照射パラメータ情報111cを受け取った照射制御システム112cによって行われる。回転ガントリー情報111aは治療計画システム110から回転ガントリー制御システム112aに渡され、回転ガントリー制御システム112aに従って、治療計画システム110が定める規定回転角になるように回転ガントリーが回転する。また前述のように、患者カウチ201の位置決めの基本となるアライメント情報111eが患者位置決め制御システム(カウチ制御システム)112bに渡され、患者位置決め制御システム112bの制御に従って患者カウチ201の各可動部モーターが駆動し、患者が横たわる寝台が治療計画システム110の定める規定の位置・角度に設置されるように、患者カウチ201をアライメントする。
【0024】
次に、さらに詳細な患者カウチ201の位置決めを行うために、治療室内に取り付けられた位置決め画像用取得装置117aによって患者患部の透視画像の撮影が行われる。このとき、操作者は検出器設置器具の各可動部の駆動制御を行う検出器設置器具制御システム115を用いて、位置決め用画像取得装置117aの患者患部透視画像撮影の妨げにならない位置にガンマ線検出器202が設置されるよう、ガンマ線検出器設置器具203をアライメントする。
【0025】
患者患部の透視画像が撮影されると、得られた透視画像情報117bは患者位置決め制御システム112bに渡される。患者位置決め制御システム112bは、透視画像情報117bを基に患者患部が治療計画システム110で計算された陽子線の照射位置に正確に一致するように、患者カウチ201のアライメントの微調整を行う。
【0026】
患者カウチ201のアライメント調整が終了すると、患者カウチ201の最終的な患者カウチ情報111bが、患者位置決め制御システム112bから検出器設置器具制御システム115内の演算処理装置113に渡される。このとき、回転ガントリー情報111aと治療計画システム110による計算照射野情報111dの情報も、治療計画システム110から演算処理装置113に渡される。
【0027】
演算処理装置113は、回転ガントリー情報111a,患者カウチの患者カウチ情報111b,計算照射野情報111dの3つの情報を用いて、治療計画システム110によって事前に計算された陽子線飛程終端のビーム軸上への射影点と、ガンマ線検出器202のガンマ線有感面中心を結ぶ直線が、ビーム軸と垂直を作り、かつできるだけガンマ線検出器202を患者に近づけることができるガンマ線検出器202の設置位置、すなわち前述の、より高い精度で陽子線飛程終端付近を測定することができる、患者カウチ201上におけるガンマ線検出器202の3次元位置を計算する。さらに演算処理装置113は、ガンマ線検出器設置器具203の各可動部が持つ自由度から、ガンマ線検出器202を前述の3次元位置に設置させることのできる各可動部ごとの規定駆動量情報(可動量情報)114の計算を行う。
【0028】
検出器設置器具制御システム115は、演算処理装置113によって計算された各可動部ごとの規定駆動量情報114に従ってガンマ線検出器設置器具203の各可動部駆動機構116を動作し、ガンマ線検出器設置器具203をアライメントする。このような制御を用いて、ガンマ線検出器202のアライメントが行われる。
【0029】
また検出器設置器具制御システム115もしくは治療計画システム110を用いて、可動部駆動機構116の規定駆動量情報114を各可動部ごとに直接入力し、手動でガンマ線検出器設置器具203をアライメントすることができる。
【0030】
さらに規定駆動量情報114は、検出器設置器具制御システム115に備えられた記録媒体(図示せず)内に保持され、記録媒体のフォーマットおよび記録媒体に記録されたデータの消去を行わない限りは、記録媒体に保持された複数の規定可動量情報114に関して何度でも選択して可動部を再アライメントすることができる。記録媒体に記録された規定可動量情報114データの消去及び選択は、検出器設置器具制御システム115上または治療計画システム110から行う。
【0031】
ガンマ線検出器を患者カウチに設置する例の手段として、図5のような構成も考えられる。図5のガンマ線検出器設置器具(検出器固定装置)303は、患者カウチ301を囲むような構造になっている。ガンマ線検出器設置器具303には、ある一定の半径の円の円周上を沿う2本の半環状のレール303bが、二又形状のレール取り付け具303cに設置されている。レール取り付け具303cには、取り付けられた2本のレール303bを同時に連動して可動させる動力が備わっており、各レール303bを患者カウチ301に対して垂直方向、すなわちレール303bの円周方向に回転させる事ができる。レール303bの先端部には、2本のレール303bに挟まれる形で、検出器治具303aが取り付けられている。検出器治具303aはレール303bから取り外すことが可能で、レール303b上の任意の別位置に設置できる。検出器治具303aには、ガンマ線検出器302がガンマ線有感面を患者方向に向けた状態で設置される。また検出器治具303aには、ガンマ線検出器302をレール303bの円周方向に対して垂直にある範囲で上下させる動力機構が備わっており、患者に対してガンマ線検出器302を近づけたり遠ざけたりすることができる。レール取り付け具303cは、可動部303dに接続されている。可動部303dは患者カウチ301に対して垂直方向に回転できる自由度を持っており、動力を用いて患者カウチ301に対して任意の角度にレール303bを傾けることができる。患者カウチ301とガンマ線検出器設置器具303の接点である可動部303eは、患者カウチ301に対して水平方向に回転できる自由度を持っており、動力を用いることで、患者カウチ301に対して水平にガンマ線検出器設置器具303を回転させることができる。さらに可動部303eは患者カウチ301の患者が横たわる方向に対して水平に移動できる自由度を備えており、動力を用いることで、患者カウチに301に対してガンマ線検出器設置器具303を水平移動させることができる。これらガンマ線検出器設置器具303の各可動部の働きにより、回転ガントリー,照射ノズル104,患者カウチ301が患者の治療のために可動した場合にも、治療の妨げにならないように、陽子線照射野と、陽子線の最大到達深度付近をよりよい精度で検出できる位置に、ガンマ線検出器302を設置する事ができる。
【0032】
検出器設置器具を介して患者カウチに取り付けられるガンマ線検出器は、単体で用いるだけでなく、検出器設置器具上に複数取り付けて使用できる。図3で説明した患者カウチに、複数のガンマ線検出器を設置した構成図を、図6(a)に示す。ガンマ線検出器設置器具(検出器固定器具)403の可動部403aに取り付けられたガンマ線検出器402aの両脇に接続する形で、複数のガンマ線検出器402bがある一定の半径の円周上に配置されている。環状に複数のガンマ線検出器402a,402bを配置することで、ガンマ線検出器402a,402bは、陽子線治療中の患者周囲を覆うことができる、よって患者体内から飛来する即発ガンマ線を一度に効率よく検出する事ができる。ガンマ線検出器設置器具403は、図3のガンマ線検出器設置器具303と同様に各部が可動であり、回転ガントリー,照射ノズル104,患者カウチ401が患者の治療のために可動した場合にも、治療を妨げることなく、陽子線照射野と、陽子線の最大到達深度付近をよりよい精度で検出できる位置に、ガンマ線検出器402a,402bを設置する事ができる。
【0033】
また、ガンマ線検出器を患者カウチに設置する他の例を図6(b)を用いて、説明する。図6(b)のように、患者カウチを覆う検出器面を持った大型の環状ガンマ線検出器402cを、ガンマ線検出器設置器具403を介して患者カウチ401に取り付けることで、図6(a)の複数のガンマ線検出器402a,402bを患者カウチ401に取り付けた場合と同様の効果を得られる。本実施例では、ガンマ線検出器402cをある半径の円の円周上を覆う環状構造としたが、回転ガントリー,照射ノズル104,患者カウチ401が患者の治療のために可動した場合に、ガンマ線検出器402a,402b及び402cが、前述の陽子線照射野の確認に最適な位置に設置され、かつ患者を覆うことが出来るならば、どのようなガンマ線検出器402a,402bの接続方法及びガンマ線検出器402cの形状でも適応可能である。
【0034】
次に、図5で説明した患者カウチに、複数のガンマ線検出器を設置した構成図を、図7(a)に示す。図7(a)のように、ガンマ線検出器設置器具(検出器固定装置)503のレール503b上に、複数のガンマ線検出器502aが、ガンマ線有感面を患者カウチ501に向けた状態で取り付けられる。半環状のレール503bは、ある半径の円の円周上を沿っているため、取り付けられた複数のガンマ線検出器502aは、図6の場合と同様に、患者体内から飛来する即発ガンマ線を一度に効率よく検出する事ができる。ガンマ線検出器設置器具503は図5のガンマ線検出器設置器具303と同様に各部可動であり、回転ガントリー,照射ノズル104,患者カウチ501が患者の治療のために可動した場合にも、治療の邪魔をすることなく、陽子線照射野と、陽子線の最大到達深度付近をよりよい精度で検出できる位置に、ガンマ線検出器502aを設置する事ができる。また図7(b)のように、ある半径の円の円周に沿うように、環状の大型ガンマ線検出器502bをレール503bに取り付けることで、複数のガンマ線検出器502aをレール503bに取り付けた図7(a)の場合と、同様の効果を得られる。
【実施例2】
【0035】
陽子線治療システムの品質管理のために、治療時間外に、水ファントム(図示せず)内での陽子線の照射野を確認する必要がある。従来の確認方法は、水ファントムへの陽子線照射中に水ファントム内でピンポイントチェンバー(図示せず)を走査し、水ファントム内部の線量分布を測定する方法だったが、精度の高い照射野測定を行うためにはピンポイントチェンバーを水ファントム内で細かく走査する必要があり、非常に時間がかかっていた。
【0036】
患者体内の陽子線飛程測定と同様の原理で、患者カウチ上に設置した水ファントム内における陽子線の照射野を確認する事が出来る。ガンマ線検出器を用いた方法では、水ファントム外部から即発ガンマ線を測定することによってすばやく陽子線照射野を見積もる事ができ、陽子線治療における品質管理時間の割合を、従来のピンポイントチェンバーを用いた線量分布測定に比べて大幅に短縮する事が期待される。
【0037】
実施例1および2によれば、回転ガントリーや複数の自由度を持った患者カウチを使用して様々な方向から荷電粒子線を患者に照射する場合においても、ガンマ線検出器を患者の近くに配置し、さらに、治療計画によって患者治療前に計算された荷電粒子線飛程終端のビーム軸上への射影点と、ガンマ線検出器のガンマ線有感面中心を結ぶ直線が、ビーム軸と垂直になるようにガンマ線検出器を配置することができる。よって、回転ガントリーと複数の自由度を持った患者カウチを使用していかなる方向から荷電粒子線を患者に照射する場合でも、荷電粒子線の作る照射野を精度良く測定することができる。
【0038】
実施例1及び2は、荷電粒子線の照射治療中に、患者体内の荷電粒子線照射野を確認するためのデータを測定する事ができるため、従来のPETを用いた照射野測定法と比較して治療時間を減らすことができ、患者の負担を低減することができる。
【0039】
実施例1及び2は、荷電粒子線として陽子線や重粒子線(炭素線等)を用いることができる。即発ガンマ線を検出して照射野の形状を測定する実施例1及び2は、特に、陽子線を用いる陽子線照射システムの場合に有効である。
【0040】
実施例1及び2は、荷電粒子線を照射している間に、照射対象から放出される即発ガンマ線を検出し、照射野の形状を測定するのに必要な情報を収集できるため、患者105の生理現象による位置ずれが小さく、精度よく照射野の形状を測定することができる。また、照射野の形状を測定する時間を短縮でき、スループットが向上する。
【図面の簡単な説明】
【0041】
【図1】本発明の好適な一実施例である陽子線治療システムの構成図である。
【図2】図1に示す患者カウチの、構成図である。
【図3】図2に示す患者カウチに、取り付けられる検出器設置器具の構成図である。
【図4】図3に示す検出器設置器具の、駆動制御システムの構成図である。
【図5】図2に示す患者カウチに、取り付けられる検出器設置器具の構成図である。
【図6】図2に示す検出器設置器具の、構成図である。
【図7】図5に示す検出器設置器具の、構成図である。
【図8】図3に示したガンマ線検出器における、最適な設置位置の構成図である。
【符号の説明】
【0042】
101 陽子線発生装置
101a 前段加速器
101b シンクロトロン
102 ビーム輸送装置
102a 出射用デフレクタ
102b ビーム径路
103 回転式照射装置
104 照射野形成装置
105 患者
106,201,301 患者カウチ
106a,201a 寝台
106b,106c,106d,106e,106f,106g,203a,203b,203c,203d,203e,203f,203g,303d,303f,403e 可動部
107a,107b,107c,204a,204b,204c,204d,204e,204f 軸
108 固定部
110 治療計画システム
111a 回転ガントリー情報
111b 患者カウチ情報
111c 照射パラメータ情報
111d 計算照射野情報
112a 回転ガントリー制御システム
112b 患者位置決め制御システム
112c 照射制御システム
113 演算処理装置
114 駆動量情報
115 検出器設置器具制御システム
116 可動部駆動機構
201b 患者カウチ可動部
202,302,402a,402b,502a,801 ガンマ線検出器
203 ガンマ線検出器設置器具
301a 患者カウチ溝
303,403,503 ガンマ線検出器設置器具
303a 検出器治具
303b,503b レール
303c レール取り付け具
303e 検出器設置器具基盤
401,501 患者カウチ
402c ガンマ線検出器
801a ガンマ線有感面
801b 有感面中心
802 直線
803 ビーム軸
804 治療計画システムの計算による飛程終端のビーム軸上射影点
【特許請求の範囲】
【請求項1】
粒子線を生成させる粒子線発生装置と、
前記粒子線を照射対象に出射する照射装置と、
前記照射対象を保持するカウチと、
前記照射対象から発生する即発ガンマ線を検出するガンマ線検出器とを備え、
前記カウチが、前記ガンマ線検出器を備えることを特徴とする粒子線照射システム。
【請求項2】
前記カウチが、回転ガントリーや前記カウチの可動によって、照射対象に対して複数の角度から荷電粒子ビームを照射した場合にも、前記即発ガンマ線を検出する位置にガンマ線検出器を設置するシステムを備えることを特徴とする請求項1に記載の粒子線照射システム。
【請求項3】
前記カウチが、2台以上の前記ガンマ線検出器を備えることを特徴とする請求項1又は請求項2に記載の粒子線照射システム。
【請求項4】
前記即発ガンマ線のエネルギーが1MeVから10MeVであることを特徴とする請求項1乃至3のいずれか記載の粒子線照射システム。
【請求項5】
前記粒子線が陽子線であることを特徴とする請求項1乃至4のいずれかに記載の粒子線照射システム。
【請求項1】
粒子線を生成させる粒子線発生装置と、
前記粒子線を照射対象に出射する照射装置と、
前記照射対象を保持するカウチと、
前記照射対象から発生する即発ガンマ線を検出するガンマ線検出器とを備え、
前記カウチが、前記ガンマ線検出器を備えることを特徴とする粒子線照射システム。
【請求項2】
前記カウチが、回転ガントリーや前記カウチの可動によって、照射対象に対して複数の角度から荷電粒子ビームを照射した場合にも、前記即発ガンマ線を検出する位置にガンマ線検出器を設置するシステムを備えることを特徴とする請求項1に記載の粒子線照射システム。
【請求項3】
前記カウチが、2台以上の前記ガンマ線検出器を備えることを特徴とする請求項1又は請求項2に記載の粒子線照射システム。
【請求項4】
前記即発ガンマ線のエネルギーが1MeVから10MeVであることを特徴とする請求項1乃至3のいずれか記載の粒子線照射システム。
【請求項5】
前記粒子線が陽子線であることを特徴とする請求項1乃至4のいずれかに記載の粒子線照射システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−172262(P2009−172262A)
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−15758(P2008−15758)
【出願日】平成20年1月28日(2008.1.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成20年1月28日(2008.1.28)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]