
粒子線照射装置及び粒子線治療装置
【課題】走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現する粒子線照射装置を得ることを目的とする。
【解決手段】走査電磁石3の励磁電流を出力する走査電源4と、走査電源4を制御する照射制御装置5とを備え、照射制御装置5は、励磁電流の指令値を生成する数学モデル60を有し、走査電源4に出力された励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、評価の結果に基づいて数学モデル60を更新し、ランスルーの経験を蓄積し、蓄積されたランスルーの経験に基づいて数学モデル60が生成する励磁電流の指令値を走査電源4に出力する走査電磁石指令値学習生成器37を備えた。
【解決手段】走査電磁石3の励磁電流を出力する走査電源4と、走査電源4を制御する照射制御装置5とを備え、照射制御装置5は、励磁電流の指令値を生成する数学モデル60を有し、走査電源4に出力された励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、評価の結果に基づいて数学モデル60を更新し、ランスルーの経験を蓄積し、蓄積されたランスルーの経験に基づいて数学モデル60が生成する励磁電流の指令値を走査電源4に出力する走査電磁石指令値学習生成器37を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、医療用や研究用に用いられる粒子線治療装置に関し、ラスタースキャニングのような走査型の粒子線照射装置及び粒子線治療装置に関する。
【背景技術】
【0002】
一般に粒子線治療装置は、荷電粒子ビームを発生するビーム発生装置と、ビーム発生装置につながれ、発生した荷電粒子ビームを加速する加速器と、加速器で設定されたエネルギーまで加速された後に出射される荷電粒子ビームを輸送するビーム輸送系と、ビーム輸送系の下流に設置され、荷電粒子ビームを照射対象に照射するための粒子線照射装置とを備える。粒子線照射装置には大きく、荷電粒子ビームを散乱体で散乱拡大し、拡大した荷電粒子ビームを照射対象の形状にあわせて照射野を形成するブロード照射方式と、照射対象の形状に合わせるように、細いペンシル状のビームを走査して照射野形成するスキャニング照射方式(スポットスキャニング、ラスタースキャニング等)とがある。
【0003】
スポットスキャニングは、簡単に言えば、点描画のように粒子線ビームを小さなスポット状に照射し、照射野を形成する方法である。すなわち、ビーム供給(点を打つ)、ビーム停止、移動、を繰り返す。照射する線量をスポット位置ごとに変えられる自由度の高い照射方法であり、近年非常に注目をあびている。
【0004】
ラスタースキャニングは、簡単に言えば、一筆書きのように粒子線ビームを照射し続け、照射野を形成する方法である。すなわち、ビームを照射し続けながら、目標線量が一定な領域を等速で移動させる方法である。ビームの供給/停止を頻繁に繰り返さなくてよいので、治療時間が短くてすむメリットがある。
【0005】
スポットスキャニングとラスタースキャニングの中間の照射方法も提案されている。ラスタースキャニングのようにビームは照射し続け、スポットスキャニングのようにビーム照射位置はスポット位置間を次々と移動していく。スポットスキャニングとラスタースキャニングの両方のメリットを取り入れようとしたものである。本明細書において、この中間の照射方法をハイブリッドスキャニングと呼ぶことにする。
【0006】
ブロード照射方式は、コリメータやボーラスを用いて患部形状に合う照射野を形成する。患部形状に合う照射野を形成し、正常組織への不要な照射を防いでおり、最も汎用的に用いられている、優れた照射方式である。しかし、患者ごとにボーラスを製作したり、患部に合わせてコリメータを変形させたりする必要がある。
【0007】
一方、スキャニング照射方式は、コリメータやボーラスが不要といった自由度の高い照射方式である。しかし、患部以外の正常組織への照射を防ぐこれら部品を用いないため、ブロード照射方式以上に高いビーム照射位置精度が要求される。
【0008】
粒子線治療装置において、照射位置や照射線量の精度を上げる様々な発明がなされている。特許文献1には、正確に患部を照射することができる粒子線治療装置を提供することを目的とし、以下の発明が開示されている。特許文献1の発明は、走査装置による荷電粒子ビームの走査量とその際にビーム位置検出器により検出する荷電粒子ビームのビーム位置とを記憶装置に記憶し、この記憶された走査量及びビーム位置を用い、制御装置により治療計画情報に基づくビーム位置に応じて走査装置の走査量を設定する。実際に照射して得られた走査量とビーム位置との関係が記憶装置に記憶されているため、正確に患部を照射することが期待できるものである。
【0009】
特許文献2には、高い安全性を確保し、高精度で荷電粒子ビームを照射できる粒子治療装置を提供することを目的とし、以下の発明が開示されている。特許文献2の発明は、荷電粒子ビーム発生装置から出射された荷電粒子ビームを、ビーム進行方向と垂直な照射面上に走査する走査電磁石に供給し、この走査電磁石を通過した荷電粒子ビームの照射面上における位置及び線量に基づいて、荷電粒子ビーム発生装置からの荷電粒子ビームの出射量を制御する。具体的には、照射面上で分割して形成される複数の領域のうち、目標線量に達した領域への荷電粒子ビームの供給を停止し、目標線量に達していない他の領域に荷電粒子ビームを供給する。このように、各領域における照射線量を目標線量と比較し、荷電粒子ビームの出射量をON/OFF制御(供給/停止)することによって、高い安全性を期待するものである。
【0010】
特許文献3には、走査電磁石の電流と磁場との間にあるヒステリシス特性がビーム照射位置の精度を低下させる課題に対して、以下の発明が開示されている。特許文献3の発明は、照射計画に基づくビーム照射位置に対応して、ヒステリシスの影響を考慮しない走査電磁石の電流値を演算する第1の演算手段と、第1の演算手段で演算した走査電磁石の電流値を、ヒステリシスの影響を考慮して補正演算する第2の演算手段とを有し、照射制御装置は、第2の演算手段の演算結果に基づいて走査電磁石の電流を制御する。このように第2の演算手段にヒステリシスの影響を排除するように補正演算を実施することで、すなわち、第2の演算手段にヒステリシス特性を表す数学モデルを有することにより、演算によりビーム照射位置の精度の向上を期待するものである。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2005−296162号公報
【特許文献2】特開2008−272139号公報
【特許文献3】特開2007−132902号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
特許文献1に開示された発明においては、実際に照射をして得られた荷電粒子ビームの走査量とビーム位置との実データに基づいて変換テーブルを作成し、この変換テーブルを用いて走査電磁石の設定電流値を演算している。
【0013】
しかしながら、実際には特許文献3に示されているように、走査電磁石の電流と磁場との間にはヒステリシス特性が存在し、電流値が増加しているときと、電流値が減少しているときとでは、異なった磁場となる。すなわち、ある瞬間における走査電磁石の電流値が分かったとしても、その情報からだけでは、磁場の正確な値を特定できない。したがって、特許文献1に開示されている発明では、電磁石のヒステリシスの影響により正確に患部を照射することができない問題点があった。
【0014】
特許文献2に開示された発明においては、定義した各領域における照射線量が目標線量となるよう、荷電粒子ビームの出射量をON/OFF制御(供給/停止)している。
【0015】
しかしながら、特許文献2に開示された発明に記載された照射面上で分割して形成される複数の領域は、対応する走査電磁石の励磁電流の範囲によって定義される励磁電流空間内の領域(励磁領域)であり、実際の照射空間内の領域(照射領域)とは一致しない。走査電磁石のヒステリシスを考慮しなければ、この励磁領域と照射領域が正確に1対1に対応することはないからである。したがって、このように励磁領域単位で照射線量を管理して安全性を高めようとした装置や方法においても、走査電磁石のヒステリシスの影響を排
除しなければ、小領域で線量を管理する効果を発揮できない。すなわち、走査電磁石のヒステリシスによりビーム照射位置の精度が悪くなるという問題点があった。
【0016】
特許文献3に開示された発明においては、演算手段の内部にヒステリシスの数学的モデルを作り、演算によって走査電磁石の電流値を補正している。
【0017】
しかしながら、ヒステリシスを考慮していても、特許文献3の発明のような考慮の仕方では、まだいくつか問題点がある。第1の問題点は、ヒステリシス特性を演算的な手法を用いて高精度に補正することは、実際にはかなり難しいということである。例えば、電流と磁場とのヒステリシス特性を表す曲線は、入力(電流)の振幅だけではなく、入力(電流)を変化させる速度や、変化させるパターンによって様々な様態となる。この複雑なヒステリシス現象を演算的手法、すなわち数学的モデルで表すことは、多くの分野で長年いろいろと研究工夫がなされてきているが、やはり現実的には難しい。また、第2の問題点は、ビーム照射位置の検出方法にある。従来の多くは、この特許文献3に開示された発明のように、1台もしくは複数のビーム位置モニタのみによってビーム照射位置を検出しようとしている。ビーム位置モニタは、荷電粒子ビームが照射されて、はじめてビーム照射位置が分かるものである。したがって、ビームがターゲットからはずれて正常組織等を照射してしまったとき、単にビームを停止することしかできず、本来照射すべきだった正しい照射位置へビーム照射位置を制御するといったことができない問題点があった。
【0018】
この発明は上記のような課題を解決するためになされたものであり、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現する粒子線照射装置を得ることを目的とする。
【課題を解決するための手段】
【0019】
走査電磁石の励磁電流を出力する走査電源と、走査電源を制御する照射制御装置とを備えた。照射制御装置は、励磁電流の指令値を生成する数学モデルを有し、走査電源に出力された励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、評価の結果に基づいて数学モデルを更新し、ランスルーの経験を蓄積し、蓄積されたランスルーの経験に基づいて数学モデルが生成する励磁電流の指令値を走査電源に出力する走査電磁石指令値学習生成器を備えた。
【発明の効果】
【0020】
この発明に係る粒子線照射装置は、ランスルーの結果を評価し、ランスルーの経験を蓄積し、蓄積されたランスルーの経験に基づいて数学モデルが生成する励磁電流の指令値をを走査電源に出力するので、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現することができる。
【図面の簡単な説明】
【0021】
【図1】この発明の実施の形態1における粒子線治療装置の概略構成図である。
【図2】図1の照射制御装置の構成図である。
【図3】図1の他の照射制御装置の構成図である。
【図4】磁場空間で定義した複数領域を示す図ある。
【図5】学習照射の際の点数表の例を示す図である。
【図6】この発明の実施の形態2における照射制御装置の構成図である。
【図7】この発明の実施の形態2における他の照射制御装置の構成図である。
【図8】この発明の実施の形態3における指令電流を生成する数学的モデルの例である。
【図9】この発明の実施の形態3における照射制御装置の構成図である。
【発明を実施するための形態】
【0022】
実施の形態1.
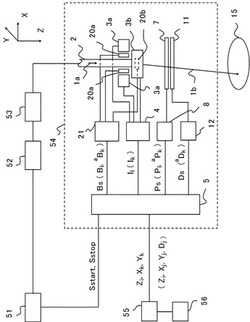
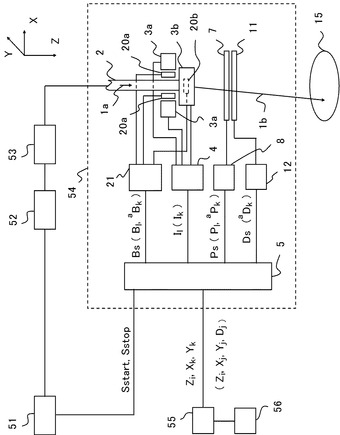
図1はこの発明の実施の形態1における粒子線治療装置の概略構成図である。粒子線治療装置は、ビーム発生装置51と、加速器52と、ビーム輸送装置53と、粒子線照射装置54と、治療計画装置55と、データサーバ56とを備える。なお、治療計画装置55を粒子線治療装置の構成部品とは考えず、独立して準備することも可能である。ビーム発生装置51は、イオン源で発生させた荷電粒子を加速して荷電粒子ビームを発生させる。加速器52は、ビーム発生装置51に接続され、発生した荷電粒子ビームを加速する。ビーム輸送装置53は、加速器52で設定されたエネルギーまで加速された後に出射される荷電粒子ビームを輸送する。粒子線照射装置54は、ビーム輸送系53の下流に設置され、荷電粒子ビームを照射対象15に照射する。
【0023】
治療計画装置55は、照射対象である患部15の3次元データに基づいて、照射条件などいくつかの治療の計画を立案し、粒子線治療をシミュレートすることができる。粒子線治療を行う医者が最終的に選択した治療計画は、ここで粒子線治療装置を駆動するためのコードに変換される。駆動するためのコードとは、例えばスポットスキャニングの場合であれば、照射層(レイヤー)Zi(下添え字iはレイヤー番号)ごとのスポットの座標Xj,Yj(下添え字jはスポット番号)及びそのスポットに照射する目標線量Djであり、また、ラスタースキャニング等の場合であれば、照射層(レイヤー)Ziごとの照射軌道を、サンプリング周期ごとの照射位置Xk,Yk(下添え字kはシーケンス番号)で表した時系列データ等である。ここで、スポットに照射する目標線量、としたのは、ブラッグピークの特性から、下層の照射の影響を上層が受けてしまうからであり、その箇所に必要な目標線量ではない。データサーバ56は、治療計画装置55で患者毎に生成した治療計画データ及び駆動するためのコードを記憶する。
【0024】
粒子線照射装置54は、ビーム輸送装置53から入射された入射荷電粒子ビーム1aを輸送するビーム輸送ダクト2と、入射荷電粒子ビーム1aに垂直な方向であるX方向及びY方向に入射荷電粒子ビーム1aを走査する走査電磁石3a、3bと、走査電磁石3a、3bが発生させる磁場を検出する磁場センサ20a、20bと、磁場データ変換器21と、ビーム位置モニタ7と、位置データ変換器8と、線量モニタ11と、線量データ変換器12と、照射制御装置5と、走査電源4とを備える。磁場センサ20a、20bは例えばピックアップコイルを有する磁場センサである。なお、図1に示したように入射荷電粒子ビーム1aの進行方向はZ方向である。
【0025】
走査電磁石3aは入射荷電粒子ビーム1aをX方向に走査するX方向走査電磁石であり、走査電磁石3bは入射荷電粒子ビーム1aをY方向に走査するY方向走査電磁石である。磁場センサ20aはX方向の磁場を検出するX方向磁場センサであり、磁場センサ20bはY方向の磁場を検出するY方向磁場センサである。磁場データ変換器21は磁場センサ20a、20bで検出した磁場を表すセンサの電気信号を、デジタルデータの測定磁場Bsに変換する。ビーム位置モニタ7は走査電磁石3a、3bで偏向された出射荷電粒子ビーム1bの通過位置を検出する。位置データ変換器8はビーム位置モニタ7で検出した通過位置を表すセンサの電気信号から、照射層(レイヤー)での照射位置を計算し、デジタルデータの測定位置座標Psを生成する。線量モニタ11は出射荷電粒子ビーム1bの線量を検出する。線量データ変換器12は、線量モニタ11で検出した線量を表すセンサの電気信号を、デジタルデータの測定線量Dsに変換する。
【0026】
照射制御装置5は、走査電源4への励磁電流の指令値である指令電流Ixk,Iykを出力し、各照射層(レイヤー)Ziにおける照射位置を制御する。走査電源4は照射制御装置5から出力された指令電流Ixk,Iykに基づいて、走査電磁石3a、3bへ実際
に駆動する励磁電流を出力する。
【0027】
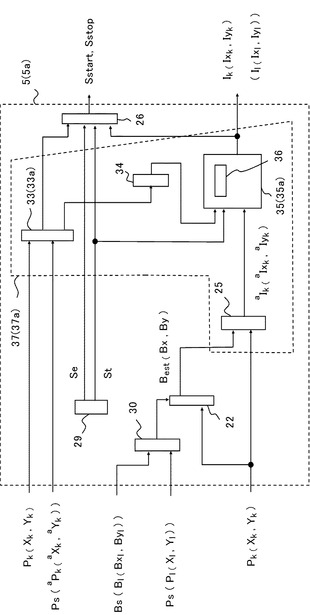
図2は照射制御装置5の構成図である。照射制御装置5は、逆写像生成器30と、逆写像演算器22と、指令値出力器25と、指令評価器33と、指令更新器34と、走査電磁石指令値系列生成器35と、ビーム供給指令出力器26とを有する。走査電磁石指令値系列生成器35は指令値記憶装置36を有する。指令値出力器25と、指令評価器33と、指令更新器34と、走査電磁石指令値系列生成器35は、走査電磁石指令値学習生成器37を構成する。走査電磁石指令値学習生成器37は、走査電源4に出力された指令電流Ik=(Ixk,Iyk)による一連の照射動作であるランスルーの結果を評価し、評価の結果が所定の条件を満たさない場合に指令電流Ik=(Ixk,Iyk)を更新してランスルーが実行され、評価の結果が所定の条件を満たした指令電流Ik=(Ixk,Iyk)を走査電源4に出力する。
【0028】
照射制御装置5の動作について説明する。粒子線治療装置の照射には、大きく分けるとキャリブレーション時の試し照射と、治療時の本照射とがある。一般的にキャリブレーション時の試し照射は、いわゆる校正のための照射であり、患者のいない状態で、校正が必要なときのみ行う。X方向走査電磁石3aへの制御入力(電流Ix)とY方向走査電磁石3bへの制御入力(電流Iy)をいろいろな値にふって試し照射を行い、そのときのビーム照射位置を測定する。実施の形態1におけるキャリブレーション時の試し照射は、従来と同様に行うが、スポットスキャニング的に荷電粒子ビームの供給及び停止を行い、試し照射時において、ビームの測定位置座標Ps(xs,ys)だけではなく、磁場センサ20a,20bにより測定磁場Bs(Bxs,Bys)をも測定する。試し照射をスポットスキャニング的に行うことで、ビームの測定位置座標Ps(xs,ys)を明確に測定することができる。このときの走査電磁石3の測定磁場Bs(Bxs,Bys)とビームの測定位置座標Ps(xs,ys)との関係は、逆写像生成器30によって生成された逆写像演算器22の数式モデルとして実現する。
【0029】
あらかじめ、試し照射用に指令電流Il=(Ixl,Iyl)(下添え字lは試し照射のスポット番号を表す)を用意する(ステップS001)。試し照射用の指令電流Il=(Ixl,Iyl)は、照射されるスポットが、粒子線照射装置54の想定した照射範囲内で照射されるように用意する。指令値出力器25は、指令電流Il=(Ixl,Iyl)を走査電源4に出力する(ステップS002)。走査電源4は、指令電流Il=(Ixl,Iyl)に従って走査電磁石3を制御する(ステップS003)。
【0030】
ビーム供給指令出力器26は、指令値出力器25と同期して、走査電磁石3a、3bの磁場が整定するに十分な整定時間を待って、ビーム発生装置51にビームの発生を指示するビーム供給指令Sstartを出力する。ビーム発生装置51は荷電粒子ビームの照射を開始する。試し照射に必要な照射時間Ton経過後、ビーム発生装置51にビームの停止を指示するビーム停止指令Sstopを出力し、ビーム発生装置51は荷電粒子ビームの照射を停止する。
【0031】
指令電流Il=(Ixl,Iyl)により制御された走査電磁石3a、3bの磁場を、磁場センサ20a、20bにより測定する。試し照射のスポット毎に測定された測定磁場Bl=(Bxl,Byl)は、磁場データ変換器21を介して逆写像生成器30に入力される。
【0032】
ビーム位置モニタ7により、スポット毎に走査電磁石3で走査された出射荷電粒子ビーム1bの照射位置座標Pl=(Xl,Yl)を算出する。照射位置座標Pl=(Xl,Yl)は、位置データ変換器8を介して逆写像生成期30に入力される。
【0033】
逆写像生成器30は、全スポットの測定磁場Bl=(Bxl,Byl)及び照射位置座標Pl=(Xl,Yl)を、内蔵された記憶装置であるメモリに記憶する(ステップS004)。
【0034】
逆写像生成器30は、記憶した測定磁場Bl=(Bxl,Byl)及び照射位置座標Pl=(Xl,Yl)に基づいて数式モデルを作成し、作成した数式モデルを逆写像演算器22に格納する(ステップS005)。
【0035】
逆写像演算器22の数式モデルは、好適な一例として、多項式を用いて実現する。従来の変換テーブルとは異なり、逆写像演算器22としたことについて説明をする。走査電磁石3の仕様、走査電源4の仕様、及び照射ビームの仕様(照射エネルギー、入射ビーム位置など)が一定であるという仮定のもとでは、走査電磁石3の磁場B(Bx,By)が決まれば、ビームの照射位置座標P(x,y)が一意に決まるので、磁場Bとビームの照射位置座標Pとの関係に関する物理現象は2入力2出力の正写像と捉えることができる。
【0036】
しかし、治療における本照射の際は、ビームの目標照射位置座標Pobj=(Pxobj,Pyobj)が先に与えられて、そのビームの目標照射位置座標Pobj=(Pxobj,Pyobj)を実現するように走査電磁石3の磁場B(Bx,By)を制御しなければならない。つまり、治療における本照射ではビームの目標照射位置座標Pobj=(Pxobj,Pyobj)から、その目標照射位置座標Pobj=(Pxobj,Pyobj)を実現するように走査電磁石3の磁場B(Bx,By)の推定値Best=(▲Bx▼,▲By▼)を算出しなければならない(▲Bx▼及び▲By▼の説明は、数式(1)及び数式(2)参照)。このように、本照射では位置から磁場への、逆向きの写像が必要であることに注意する。したがって、磁場B(Bx,By)の推定値Bestを得るために逆写像演算器22が必要となる。
【0037】
逆写像演算器22の数式モデルを多項式にて実現する方法の概略を説明する。ここで多項式とは、数学で一般的に定義されている多項式(polynomial)であり、「定数及び不定元の和と積のみからなる式」などと定義されている。具体的には、例えば以下の数式に示すようなものである。
【0038】
【数1】

【0039】
【数2】
ここで、m00、m01、m02、m10、m11、m20、n00、n01、n02、n10、n11、n20は未知パラメータ定数である。また、Pxobj、Pyobjは多項式の不定元に相当する。また、数式(1)の左辺(Bの上に小⌒が付いたBx、これを▲Bx▼で示す。)はBxの推定値であり、数式(2)の左辺(Bの上に小⌒が付いたBy、これを▲By▼で示す。)はByの推定値であることを示す。磁場B(Bx,By)の推定値Bestは(▲Bx▼,▲By▼)である。
【0040】
多項式の未知パラメータ定数は、試し照射の測定磁場Bl=(Bxl,Byl)及び照射位置座標Pl=(Xl,Yl)に基づいて、最小二乗法などにより求める。
【0041】
目標照射位置座標Pobj=(Pxobj,Pyobj)を実現する磁場B=(Bx,By)の推定値Bestは、求めた未知パラメータ定数を代入した数式(1)、数式(2)により求める。
【0042】
従来技術においては、キャリブレーションの走査電磁石3への制御入力(指令電流Il=(Ixl,Iyl))とビームの照射位置座標Pl=(Xl,Yl)との関係を、変換テーブルとして作成し、走査電磁石指令値生成器6にこの変換テーブルを記憶しておく方式であった。
【0043】
すなわち、X方向走査電磁石3aへの制御入力(指令電流Ixl)はビームの目標照射位置Pobjのx座標(Pxobj)から、Y方向走査電磁石3bへの制御入力(指令電流Iyl)はビームの目標照射位置Pobjのy座標(Pyobj)から、それぞれ独立に求めていた。
【0044】
しかし、実際にはX方向走査電磁石3aへの制御入力(指令電流Ixl)はビームの照射位置Pのx座標にもy座標にも、また、Y方向走査電磁石3bへの制御入力(指令電流Iyl)もビーム照射位置Pのx座標にもy座標にも影響を与える、すなわち干渉項があるので、独立に求める変換テーブルによる手法では、照射位置精度は劣化する。
【0045】
実施の形態1の粒子線照射装置54は、目標照射位置座標Pobj=(Pxobj,Pyobj)を実現する磁場B=(Bx,By)の推定値Bestを求めるにあたり、前記干渉項を考慮した数式モデルを逆写像演算器22に実現したので、従来とは異なり、出射荷電粒子ビーム1bの照射位置精度を向上させることができる。
【0046】
次に実施の形態1の粒子線治療装置における本照射について説明する。本照射は、ビーム照射位置及び線量の制御を最適化する学習照射と、患者の照射対象15にビームを照射する治療照射に分かれる。学習照射は以下の手順により行う。
【0047】
或る照射対象15に対して、治療計画装置55で作成された治療計画のうち医者が最終的に選択したものが、粒子線治療装置を駆動するためのコードに変換され、照射制御装置5に送られる(ステップS101)。ここでは、学習照射及び治療照射はラスタースキャニングを想定し、駆動するためのコードが照射層(レイヤー)Zi(下添え字iはレイヤー番号)ごとの照射軌道をサンプリング周期ごとの照射位置Pk(Xk,Yk)(下添え字kはシーケンス番号)で表した時系列データであるとして説明する。
【0048】
学習照射のための指令電流Ik=(Ixk,Iyk)(下添え字kはシーケンス番号)は後述する方法により作成する(ステップS102)。学習照射は、患者のいない状態で、学習照射のための指令電流Ik=(Ixk,Iyk)に従って、ランスルーを行う。
【0049】
学習照射のための指令電流Ik=(Ixk,Iyk)は、その候補としては、あるいは学習の初期値としては、極論すれば何でもよい。ここでは、従来技術による方法で求めたものを初期値とする。学習照射のための指令電流は、aIk=(aIxk,aIyk)(ただし、aは学習の回数であり、初期値の場合a=0とする。)と表し、学習により指令電流が更新されることを明記する。
【0050】
また、走査電磁石指令値系列生成器35は、指令値記憶装置36に指令電流aIk=(
aIxk,aIyk)を記憶させる。指令電流aIk=(aIxk,aIyk)は、下添え字kがシーケンス番号を表す、サンプリング周期ごとの制御入力である。患者のいない状態で初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーを行う(ステップS103)。
【0051】
粒子線治療装置の操作者の、学習照射開始指示により、信号生成器29が生成した本照射開始信号Stがビーム供給指令出力器26及び走査電磁石指令値系列生成器35に送られる。走査電磁石指令値系列生成器35は、学習0回目の指令電流0Ik=(0Ixk,0Iyk)を、サンプリング周期毎に、シーケンス番号順に出力する。
【0052】
ビーム供給指令出力器26は、本照射開始信号Stを受けて、ビーム発生装置51にビームを発生するビーム供給指令Sstartを出力する。ビーム発生装置51は荷電粒子ビームの照射を開始する。
【0053】
ビーム位置モニタ7により出射荷電粒子ビーム1bの通過位置は検出され、位置データ変換器8により計算された測定位置座標PsであるaPkは指令評価器33に入力される。指令評価器33は目標照射位置である照射位置Pk(Xk,Yk)と測定位置座標PsであるaPk(aXk,aYk)を比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う(ステップS104)。ランスルーの採点方法については後述する。
【0054】
信号生成器29は、本照射が終了する時間に本照射終了信号Seを送信する。本照射が終了する時間とは、本照射が開始された時間からサンプリング周期×k(シーケンス総数)だけ経過した時間である。ビーム供給指令出力器26は、本照射終了信号Seを受けて、ビーム発生装置51にビームを停止するビーム停止指令Sstopを出力する。ビーム発生装置51はビーム停止指令Sstopを受けて、荷電粒子ビーム1aを停止する(ステップS105)。
【0055】
指令更新器34は、指令評価器33から出力された評価結果である採点結果に基づいて、学習a=0回目の指令電流aIk=(aIxk,aIyk)の一部のシーケンスを変更の対象に決定し、当該シーケンスを変更する(ステップS106)。例えば学習a=0回目の指令電流0Ik=(0Ixk,0Iyk)の第3シーケンス0I3=(0Ix3,0Iy3)を、0Ix3から0Ix3+ΔIのように少し変更する。
【0056】
次に、患者のいない状態で、一部のシーケンスを少し変更した指令電流を用いて、再度、ランスルーを行う(ステップS107)。すなわち、ステップS103乃至ステップS105を第2のランスルーとして実行する。
【0057】
一部のシーケンスを少し変更したことによって、採点結果がJ点からJ+ΔJ点だけ変わったとする。すると、指令電流の第3のシーケンス0Ix3は、ΔJ/ΔIの情報を用いて更新すればよいことがわかる。一般的な学習機能と同様に、ΔIが正の場合に採点結果が悪ければ、ΔIを負にする等の更新を行えばよい。この作業は、採点結果が影響を受けるすべてのシーケンスについて実行するとよい。この更新で、学習が1回(aをインクリメント(a+1)する)とカウントする。
【0058】
指令更新器34は、更新した学習a=1回目の指令電流aIk=(aIxk,aIyk)を作成する(ステップS108)。第2回のランスルーが前回のランスルーよりも採点結果がよいことを確認し、学習を続ける。学習は、あらかじめ設定した条件(合格点等)を満たすまで繰り返す。最終的に学習が終了した指令電流aIk=(aIxk,aIyk)は、指令値記憶装置36に記憶する。また、学習の結果、直前のランスルーよりも採点
結果が悪くなった場合は、更新の速度(1回で更新する量)を少なくする、あるいは上記で説明したように指令電流を更新する等の工夫をする。
【0059】
治療照射は以下の手順により行う。粒子線治療装置の操作者の治療照射開始指示により、本照射開始信号Stがビーム供給指令出力器26及び走査電磁石指令値系列生成器35に送られる。査電磁石指令値系列生成器35は、学習が終了した指令電流aIk=(aIxk,aIyk)を、サンプリング周期毎に、シーケンス番号順に出力する。
【0060】
ビーム供給指令出力器26は、本照射開始信号Stを受けて、ビーム発生装置51にビームを発生するビーム供給指令Sstartを出力する。ビーム発生装置51は荷電粒子ビームの照射を開始する(ステップS109)。
【0061】
信号生成器29は、本照射が終了する時間に本照射終了信号Seを送信する。本照射が終了する時間とは、本照射が開始された時間からサンプリング周期×k(シーケンス総数)だけ経過した時間である。ビーム供給指令出力器26は、本照射終了信号Seを受けて、ビーム発生装置51にビームを停止するビーム停止指令Sstopを出力する。ビーム発生装置51はビーム停止指令Sstopを受けて、荷電粒子ビーム1aを停止する(ステップS110)。
【0062】
次にランスルーの採点方法について説明する。最も直接的な採点方法(第1の採点方法)は、ラスタースキャニング用の駆動するためのコード、すなわち、照射層(レイヤー)Ziごとの照射軌道を、サンプリング周期ごとの照射位置Pk(Xk,Yk)(下添え字kはシーケンス番号)で表した時系列データと、実際にランスルーをしたときのサンプリング周期ごとの照射位置aPk(aXk,aYk)(aは学習の回数)を比較して、以下の評価関数を考えることである。この評価関数の値が、所定の値になった場合(所定の条件を満たした場合)に学習を終了する。
【0063】
【数3】
【0064】
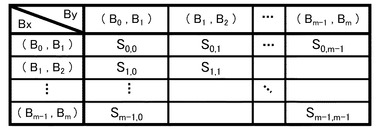
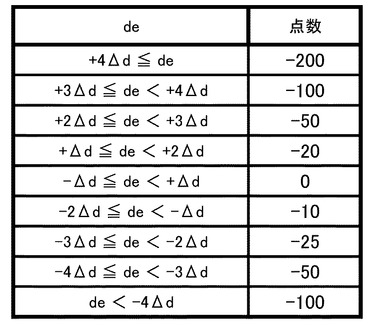
また、ランスルーの採点は、照射線量に着目して、以下の方法(第2の採点方法)で行うこともできる。ランスルーの採点は、図4に示すように磁場空間内で定義した複数の小領域毎に、目標線量Diと測定線量Dsとを比較し、図5に示す点数表Tにしたがって採点を行う。ランスルーの評価は、例えば、磁場空間内で定義した複数の小領域毎の点数を加えたものを評価関数として定義し、この評価関数の点数により評価を行う。評価関数の点数が高くなったランスルーは点数が低いものより優れていると判定する。図4は磁場空間(Bx,By)で定義した磁場小領域Si,jを示す図であり、図5は学習照射の際の点数表Tの例を示す図である。なお、小領域に対応した目標線量Diは、治療計画装置により計算され与えられる。測定線量Dsは、ビーム位置モニタ7の測定結果と、荷電粒子ビーム1bが前記小領域を通過した時間等から求める。
【0065】
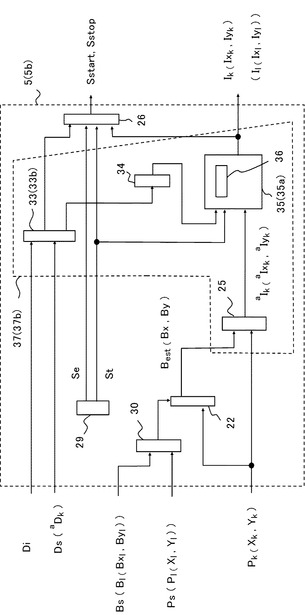
なお、ランスルーの第2の採点方法においては、図3に示すように、指令評価器33に入力される信号が異なる。これに伴いステップS104も異なる。図3はランスルーの第2の採点方法を採用した照射制御装置の構成図である。照射制御装置5bの走査電磁石指令値学習生成器37bの指令評価器33bには目標線量Di及び測定線量Ds(aDk)が入力される。ステップS104において、線量モニタ11により線量が検出され、線量
データ変換器12により変換された測定線量Dsは指令評価器33bに入力される。指令評価器33bは目標線量Diと測定線量Dsを比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う。
【0066】
図4において、表の左列の(B0,B1)は、磁場BのX成分BxがB0≦Bx<B1の関係を満たすことを簡略して示したものであり、同様に(Bm−1,Bm)は、BxがBm−1≦Bx<Bmの関係を満たすことを簡略して示したものである。表の上段の(B0,B1)は、磁場BのY成分ByがB0≦By<B1の関係を満たすことを簡略して示したものであり、同様に(Bm−1,Bm)は、ByがBm−1≦By<Bmの関係を満たすことを簡略して示したものである。領域S0,0はB0≦Bx<B1及びB0≦By<B1の関係を満たす領域であり、領域Sm−1,m−1はBm−1≦Bx<Bm及びBm−1≦By<Bmの関係を満たす領域である。
【0067】
ランスルーの採点は、粒子線照射装置54の照射可能範囲に対応する磁場空間の全領域で行う。これにより患者の照射対象15は目標線量Diで管理され、照射対象15ではない正常組織相当箇所は線量が零で管理されるので、照射対象15及び非照射対象の荷電粒子ビームの線量管理を精度良く行うことができる。
【0068】
走査電磁石3の磁場が決まれば、荷電粒子ビームの照射位置は唯一に決まる。言い換えれば、走査電磁石3の磁場と、荷電粒子ビームの照射位置は1対1の関係にある。したがって、従来技術の指令値電流空間で定義された領域のような走査電磁石のヒステリシスの影響を受けることがない。また、キャリブレーションのときに荷電粒子ビームを照射して得られた磁場センサ20による磁場とビーム位置モニタ7によるビーム位置との関係は、キャリブレーションのときと同様に荷電粒子を走査する場合の本照射の際の磁場とビーム位置との関係とは、極めてよく一致する。実照射空間は、荷電粒子ビームの出射位置、ビーム位置モニタ7における通過位置、粒子線照射装置54と照射対象15との位置関係により求めることができるので、実照射空間の領域は磁場空間で定義された領域と写像関係を有し、本照射の際にもこの写像関係はほとんど変わらない。したがって、ランスルーの採点を磁場空間内で定義した複数の磁場小領域Si,j毎に行い、この磁場小領域Si,j毎に荷電粒子ビームの線量管理を行うので、照射対象15における実照射空間での線量管理を精度よく行うことができる。
【0069】
図5に示した学習照射の際の点数表Tは減点方式の例である。線量誤差deは領域測定線量Dssから目標線量Diを引いた差である。領域測定線量Dssは磁場空間(Bx,By)で定義した磁場小領域Si,jの実照射線量であり、磁場センサ20で測定した測定磁場Bsと、線量モニタ11で測定した測定線量Dsにより作成する。Δdは線量誤差の幅であり、許容範囲である所定の値に設定される。測定線量Dsが目標線量Diを超過した場合における点数の変化率の絶対値は、測定線量Dsが目標線量Diに満たない場合における点数の変化率の絶対値よりも大きくしている。これにより測定線量Dsが目標線量Diを超過した場合の修正を迅速に的確に行うことができる。
【0070】
実施の形態1の第1の採点方法を適用した粒子線照射装置54は、実際の照射位置を評価関数としているため、走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。また、実施の形態1の第2の採点方法を適用した粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に目標線量Diと領域測定線量Dssから点数をつけ、この点数により評価関数を定義したことにより、走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。したがって、高精度で安全性の高い粒子線照射装置を提供することができる。
【0071】
粒子線照射装置54は、第1の採点方法で、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響が反映された実際の照射位置を評価関数として走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習しているため、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。また、第2の採点方法で、粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に荷電粒子ビームの線量管理を行うので、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。したがって走査電磁石のヒステリシスの影響を排除し、高精度なビーム照射を実現することができる。
【0072】
磁場センサ20は、ホール素子を有する磁場センサでも構わない。ホール素子を用いることで走査電磁石3により発生された磁場の絶対値を測定でき、ピックアップコイルで計測された電圧を積分等の演算を行う必要がなくなる。したがって磁場データ変換器21を簡略化、小型化することができる。
【0073】
磁場センサ20として最も望ましいのは、ビックアップコイルとホール素子の両方を備えるものである。ホール素子の、磁場の絶対値が測定できるという利点と、ピックアップコイルの、磁場の変化分をヒステリシスがなく測定できるという利点との、両方を取り入れることができるからである。
【0074】
従来の粒子線照射装置は、1台もしくは複数のビーム位置モニタのみによってビーム照射位置を検出して、測定位置座標により荷電粒子ビームのフィードバック制御をしていた。位置モニタなどの荷電粒子ビームを遮るものを多く配置することは、ビームが散乱拡大することにつながり、所望のビームスポット径が得られないといった問題点があった。
【0075】
実施の形態1の粒子線照射装置54は、治療照射の際には走査電磁石指令値系列生成器35は学習が終了した指令電流aIk=(aIxk,aIyk)を、サンプリング周期毎に、シーケンス番号順に出力して荷電粒子ビームの照射位置及び照射線量の制御を行ったので、本照射の際にビーム位置モニタ7を図示しない移動装置により移動させ、出射荷電粒子ビーム1bがビーム位置モニタ7を通過しないようにしてもよい。このようにすることでビーム位置モニタ7によって出射荷電粒子ビーム1bが散乱し拡大されることを防止できる。これにより、ビームスポット径を小さくできる。したがって、小さなビーム径で照射する方がよい場合には、適したスポット径で治療を行うことができる。
【0076】
また、指令値出力器25が、走査電磁石3の磁場B(Bx,By)の推定値Bestに基づいて指令電流Ik=(Ixk,Iyk)を生成し、これを初期値として実行したランスルーにより学習することもできる。
【0077】
なお、照射制御装置5に逆写像生成器30、逆写像演算器22を有する例で説明したが、逆写像生成器30、逆写像演算器22がない場合であっても、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現することができることは言うまでもない。
【0078】
以上のように実施の形態1の粒子線照射装置54によれば、走査電磁石3の励磁電流を出力する走査電源4と、走査電源4を制御する照射制御装置5とを備え、照射制御装置5は、走査電源4に出力された励磁電流の指令値Ikによる一連の照射動作であるランスルーの結果を評価し、評価の結果が所定の条件を満たさない場合に励磁電流の指令値Ikを更新してランスルーが実行され、評価の結果が所定の条件を満たした励磁電流の指令値Ikを走査電源4に出力する走査電磁石指令値学習生成器37を有したので、走査電磁石指令値学習生成器37がランスルーの結果に基づいて、走査電源4への励磁電流の指令値Ikを好適なものに学習でき、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現することができる。
【0079】
実施の形態1の粒子線治療装置によれば、荷電粒子ビームを発生させるビーム発生装置51と、ビーム発生装置51で発生された荷電粒子ビームを加速する加速器52と、加速器52により加速された荷電粒子ビームを輸送するビーム輸送装置53と、ビーム輸送装置53で輸送された荷電粒子ビームを走査電磁石3で走査して照射対象15に照射する粒子線照射装置54とを備え、粒子線照射装置54は、走査電磁石3の励磁電流を出力する走査電源4と、走査電源4を制御する照射制御装置5とを備え、照射制御装置5は、走査電源4に出力された励磁電流の指令値Ikによる一連の照射動作であるランスルーの結果を評価し、評価の結果が所定の条件を満たさない場合に励磁電流の指令値Ikを更新してランスルーが実行され、評価の結果が所定の条件を満たした励磁電流の指令値Ikを走査電源4に出力する走査電磁石指令値学習生成器37を有したので、走査電磁石指令値学習生成器37がランスルーの結果に基づいて、走査電源4への励磁電流の指令値Ikを好適なものに学習でき、走査電磁石のヒステリシスの影響が排除され、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を使用して高精度な粒子線治療を実現することができる。
【0080】
実施の形態2.
実施の形態1では、本照射の学習照射において荷電粒子ビームの照射を行ったが、荷電粒子ビームの照射を行わずに学習し、指令電流Ik=(Ixk,Iyk)を最適化することができる。以下に説明する。実施の形態2の粒子線治療装置では、学習照射のランスルーの採点として2種類のランスルーの採点方法(第3の採点方法、第4の採点方法)を用いることができる。第3の採点方法は、ラスタースキャニング用の駆動するためのコード、すなわち、照射層(レイヤー)Ziごとの照射軌道を、サンプリング周期ごとの照射位置Pk(Xk,Yk)(下添え字kはシーケンス番号)に対応した磁場の推定値BestであるBk=(Bxk,Byk)で表した時系列データと、実際にランスルーをしたときのサンプリング周期ごとの測定磁場aBk(aBxk,aByk)(aは学習の回数)を比較して、以下の評価関数を考えることである。なお、磁場の推定値Bkは逆写像演算器22で演算したものである。
【0081】
【数4】
【0082】
第4の採点方法は、図5に示す点数表Tにしたがって採点を行う方法である。しかし、学習照射の際に荷電粒子ビームの照射が行われないので、線量誤差deは、実施の形態1とは異なり、領域線量計算値Dscから目標線量Diを引いた差とする。領域線量計算値Dscは磁場センサ20で測定した測定磁場aBk(aBxk,aByk)から、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に出射荷電粒子ビーム1bが滞在する時間分で線量を積分して求める。
【0083】
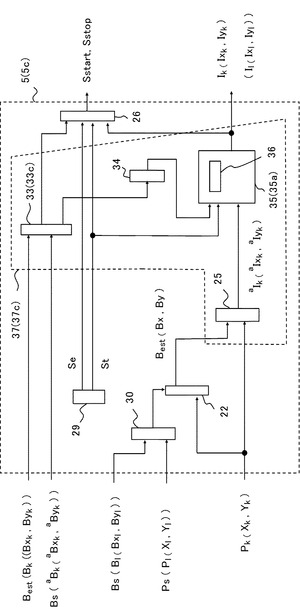
図6はこの発明の実施の形態2における照射制御装置の構成図であり、学習照射のランスルーの採点として第3の採点方法を採用したものである。実施の形態1の照射制御装置とは指令評価器33に入力される信号が異なる。照射制御装置5cの走査電磁石指令値学習生成器37cの指令評価器33cには磁場の推定値Bk=(Bxk,Byk)及び測定磁場aBk(aBxk,aByk)が入力される。実施の形態2における照射制御装置5
cの動作について説明する。キャリブレーション時の試し照射は実施の形態1のステップS001乃至ステップS005と同様である。学習照射は、基本的に実施の形態1のステップS101乃至ステップS108と同様であるが、荷電粒子ビームの照射を行わないので、ステップS104が異なる。実施の形態1のステップS104の代わりにステップS201を実行する。
【0084】
指令電流Ik=(Ixk,Iyk)により制御された走査電磁石3a、3bが発生する磁場を、磁場センサ20a、20bにより測定する。磁場センサ20により測定され、磁場データ変換器21で変換された測定磁場aBk(aBxk,aByk)は指令評価器33cに入力される。指令評価器33cは、シーケンス番号毎に逆写像演算器22で演算された磁場の推定値Bk=(Bxk,Byk)と測定磁場aBk(aBxk,aByk)を比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う(ステップS201)。
【0085】
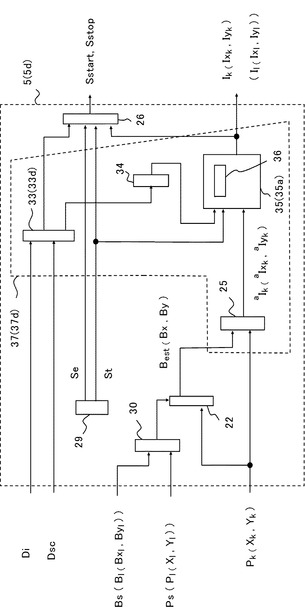
次に、学習照射のランスルーの採点として第4の採点方法を採用した場合の照射制御装置及び動作を説明する。図7はこの発明の実施の形態2における他の照射制御装置の構成図であり、学習照射のランスルーの採点として第4の採点方法を採用したものである。実施の形態1の照射制御装置とは指令評価器33に入力される信号が異なる。照射制御装置5dの走査電磁石指令値学習生成器37dの指令評価器33dには目標線量Di及び領域線量計算値Dscが入力される。実施の形態2における照射制御装置5dの動作について説明する。キャリブレーション時の試し照射は実施の形態1のステップS001乃至ステップS005と同様である。学習照射は、基本的に実施の形態1のステップS101乃至ステップS108と同様であるが、荷電粒子ビームの照射を行わないので、ステップS104が異なる。実施の形態1のステップS104の代わりにステップS202を実行する。
【0086】
指令電流Ik=(Ixk,Iyk)により制御される荷電粒子ビーム1が磁場小領域Si,j毎に滞在する時間分で積分され、領域線量計算値Dscが計算され、指令評価器33dに入力される。指令評価器33cは、目標線量Diと領域線量計算値Dscを比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う(ステップS202)。
【0087】
実施の形態2の第3の採点方法を適用した粒子線照射装置54は、測定磁場を評価関数としているため、荷電粒子ビームを照射しなくても走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。また、実施の形態2の第4の採点方法を適用した粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に計算された領域線量計算値Dscと目標線量Diから点数をつけ、この点数により評価関数を定義したことにより、荷電粒子ビームを照射しなくても走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。したがって、高精度で安全性の高い粒子線照射装置を提供することができる。
【0088】
粒子線照射装置54は、第3の採点方法で、測定磁場を評価関数として走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習しているため、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。また、第4の採点方法で、粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に荷電粒子ビームの線量管理を行うので、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。したがって走査電磁石のヒステリシスの影響を排除し、高精度なビーム照射を実現することができる。
【0089】
また、学習照射のランスルーは荷電粒子ビームを照射しないで行うことができるので、
無用なエネルギー消費を抑えることができる。
【0090】
実施の形態3.
学習機能とは、「ひとつの課題に対して、より理想的な解に近づく機能」というふうに解釈することができる。実施の形態1及び2では、治療計画装置55で患者毎に生成したひとつの治療計画データに、いかに実際の照射を近づけるかという課題に対して、より理想的な照射を実現する指令電流Ik=(Ixk,Iyk)を生成する機能について説明した。
【0091】
制御工学におけるよりアドバンストな学習機能(或いはよりインテリジェントな学習機能)とは、「過去の経験の蓄積により、未来の未知な課題に対して、より理想的な解を導けるための機能」と解釈される。そこで、実施の形態3においては、実施の形態1や2で説明した学習機能をさらに応用し、よりアドバンストな学習機能を備えた粒子線照射装置及び粒子線治療装置について説明する。
【0092】
実施の形態1において、学習照射は、ランスルーの採点を行い、採点結果に基づいて、指令電流Ik自身をより最適なものへと更新していった。この方法は、ひとつの治療計画データに対して、より理想的な照射を実現する指令電流Ikは生成できるが、ここでの経験は、他の治療計画データへは反映することができない。
【0093】
実施の形態3においては、学習照射は実施の形態1若しくは2と同様にランスルーの採点を行う。しかし、ランスルーの採点結果に基づいて、指令電流Ik=(Ixk,Iyk)自身を更新するのではなく、指令電流Ik=(Ixk,Iyk)を生成する数学的モデルを備えるようにし、その数学的モデルのパラメータをより最適なものへと更新するようにする。以下は、その詳細を説明したものである。
【0094】
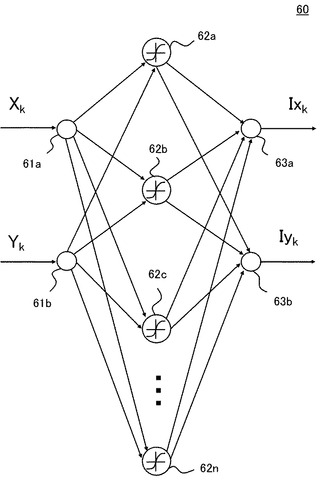
図8は、実施の形態3における、前記指令電流Ik=(Ixk,Iyk)を生成する数学的モデルの例を表した図である。図8に基づいて、指令電流Ik=(Ixk,Iyk)を生成する仕組みを説明する。
【0095】
単層の隠れ層をもつフィードフォワード型NN(ニューラルネットワーク、以下「NN」。)60は、前記指令電流Ik=(Ixk,Iyk)を生成する数学的モデルの一例である。入力層61は、NN60の入力部であり、本発明の実施の形態3では目標であるサンプリング周期ごとの照射位置Pk(Xk,Yk)が該当する。入力層61aにXkが入力され、入力層61bにYkが入力される。出力層63は、NN60の出力部であり、本発明の実施の形態3では指令電流Ik=(Ixk,Iyk)が該当する。出力層63aにIxkが出力され、出力層63bにIykが出力される。隠れ層62は、NN60の基底関数(活性化関数)であり、複数の隠れ層62a〜62nにより、入力層61a、61bからの入力信号に対して重みを与え、出力層63a、63bへと出力する。
【0096】
粒子線治療装置においては、走査電磁石3により荷電粒子ビーム1が偏向され、その照射位置が決定される。すなわち、走査電磁石3への一連の指令電流Ik=(Ixk,Iyk)が決まれば、ビームの照射位置座標P=(X,Y)が一意に決まるので、一連の指令電流Ik=(Ixk,Iyk)からビームの照射位置座標Pへの物理現象は、ヒステリシス特性というダイナミクスを有する2入力2出力のシステムと捉えることができる。NN60で実現しようとしているのは、まさにこのヒステリシス特性のダイナミクスを有する2入力2出力の逆システムを、数学的に実現しようとするものである。
【0097】
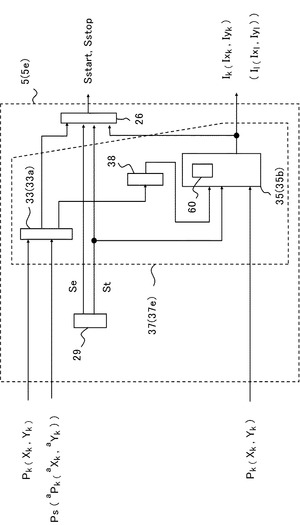
実施の形態1及び2では、学習照射における更新は、指令電流Ik=(Ixk,Iyk)自身であった。それに対し、実施の形態3では、NN60の隠れ層62における重みを更新するようにした。図9にNN60を有する走査電磁石指令値系列生成器35bを備えた照射制御装置5(5e)を示す。照射制御装置5eは、実施の形態1の照射制御装置5aから、逆写像生成器30、逆写像演算器22、指令値出力器25、指令更新器34が削除され、走査電磁石指令値学習生成器37eにパラメータ更新器38を有し、走査電磁石指令値系列生成器35にNN60が搭載された例である。照射制御装置5eは、学習照射のランスルーの採点方法を第1の採点方法とした場合である。パラメータ更新器38は指令評価器33の評価結果が所定の条件になるようにNN60のパラメータである隠れ層62における重みを更新する。NN60を有する走査電磁石指令値系列生成器35bを備えた照射制御装置5は、学習照射のランスルーの採点方法を第2乃至4の採点方法とすることもできる。この場合は、図9の指令評価器33aに代えて、それぞれ指令評価器33b乃至33dにすればよい。なお、第3の採点方法の場合、照射制御装置5は逆写像生成器30、逆写像演算器22を備え、磁場の推定値Bkを逆写像演算器22で演算したものとすればよい。
【0098】
以上のように構成することにより、本発明の実施の形態3による粒子線治療装置においては、過去に行った治療計画データに対する学習照射のランスルー(学習ランスルー)の経験が蓄積される。多くの学習ランスルーの経験が蓄積された場合は、あらたな治療計画データに対し、毎回学習ランスルーをする必要がなく、効率的に、走査電磁石のヒステリシスの影響を受け難い、高精度な照射を行う粒子線治療装置を得られる。
【0099】
なお、実施の形態1乃至3で説明した学習アルゴリズムは、ほんの一例であり、最急降下法、遺伝的アルゴリズムなど、他の技術分野で実施されている別のアルゴリズムを応用してもよい。
【0100】
また、ランスルーの評価における評価関数は、ここで説明したものに限らず、他の評価関数を用いても構わない。数式(3)や数式(4)のシーケンス番号k毎に重み付けを付けてもよい。また磁場空間内で定義した複数の小領域毎に点数を付ける場合に、小領域毎の点数Sci,jに重み付けwi,jを行ったものを加えた評価関数でもよい。これらの場合は重要な位置や領域を精度よく最適化を行うことができる。
【産業上の利用可能性】
【0101】
この発明に係る粒子線照射装置および粒子線治療装置は、医療用や研究用に用いられる粒子線治療装置に好適に適用できる。
【符号の説明】
【0102】
1 荷電粒子ビーム 1a 入射荷電粒子ビーム
1b 出射荷電粒子ビーム 3 走査電磁石
3a X方向走査電磁石 3b Y方向走査電磁石
4 走査電源 7 ビーム位置モニタ
11 線量モニタ 15 照射対象
20 磁場センサ 20a X方向電磁石用磁場センサ
20b Y方向電磁石用磁場センサ 22 逆写像演算器
33 指令評価器 34 指令更新器
35 走査電磁石指令値系列生成器 35a 走査電磁石指令値系列生成器
35b 走査電磁石指令値系列生成器 37 走査電磁石指令値学習生成器
37a 走査電磁石指令値学習生成器 37b 走査電磁石指令値学習生成器
37c 走査電磁石指令値学習生成器 37d 走査電磁石指令値学習生成器
37e 走査電磁石指令値学習生成器 38 パラメータ更新器
51 ビーム発生装置 52 加速器
53 ビーム輸送装置 54 粒子線照射装置
60 NN(ニューラルネットワーク) Ps 測定位置座標
aPk 照射位置 Pk 照射位置
Ds 測定線量 aDk 測定線量
Di 目標線量 Bs 測定磁場
aBk 測定磁場 Best 磁場の推定値
Bk 磁場の推定値 Dss 領域測定線量
Dsc 領域線量計算値 de 線量誤差
T 点数表 Si,j 磁場小領域
Ik 指令電流
【技術分野】
【0001】
この発明は、医療用や研究用に用いられる粒子線治療装置に関し、ラスタースキャニングのような走査型の粒子線照射装置及び粒子線治療装置に関する。
【背景技術】
【0002】
一般に粒子線治療装置は、荷電粒子ビームを発生するビーム発生装置と、ビーム発生装置につながれ、発生した荷電粒子ビームを加速する加速器と、加速器で設定されたエネルギーまで加速された後に出射される荷電粒子ビームを輸送するビーム輸送系と、ビーム輸送系の下流に設置され、荷電粒子ビームを照射対象に照射するための粒子線照射装置とを備える。粒子線照射装置には大きく、荷電粒子ビームを散乱体で散乱拡大し、拡大した荷電粒子ビームを照射対象の形状にあわせて照射野を形成するブロード照射方式と、照射対象の形状に合わせるように、細いペンシル状のビームを走査して照射野形成するスキャニング照射方式(スポットスキャニング、ラスタースキャニング等)とがある。
【0003】
スポットスキャニングは、簡単に言えば、点描画のように粒子線ビームを小さなスポット状に照射し、照射野を形成する方法である。すなわち、ビーム供給(点を打つ)、ビーム停止、移動、を繰り返す。照射する線量をスポット位置ごとに変えられる自由度の高い照射方法であり、近年非常に注目をあびている。
【0004】
ラスタースキャニングは、簡単に言えば、一筆書きのように粒子線ビームを照射し続け、照射野を形成する方法である。すなわち、ビームを照射し続けながら、目標線量が一定な領域を等速で移動させる方法である。ビームの供給/停止を頻繁に繰り返さなくてよいので、治療時間が短くてすむメリットがある。
【0005】
スポットスキャニングとラスタースキャニングの中間の照射方法も提案されている。ラスタースキャニングのようにビームは照射し続け、スポットスキャニングのようにビーム照射位置はスポット位置間を次々と移動していく。スポットスキャニングとラスタースキャニングの両方のメリットを取り入れようとしたものである。本明細書において、この中間の照射方法をハイブリッドスキャニングと呼ぶことにする。
【0006】
ブロード照射方式は、コリメータやボーラスを用いて患部形状に合う照射野を形成する。患部形状に合う照射野を形成し、正常組織への不要な照射を防いでおり、最も汎用的に用いられている、優れた照射方式である。しかし、患者ごとにボーラスを製作したり、患部に合わせてコリメータを変形させたりする必要がある。
【0007】
一方、スキャニング照射方式は、コリメータやボーラスが不要といった自由度の高い照射方式である。しかし、患部以外の正常組織への照射を防ぐこれら部品を用いないため、ブロード照射方式以上に高いビーム照射位置精度が要求される。
【0008】
粒子線治療装置において、照射位置や照射線量の精度を上げる様々な発明がなされている。特許文献1には、正確に患部を照射することができる粒子線治療装置を提供することを目的とし、以下の発明が開示されている。特許文献1の発明は、走査装置による荷電粒子ビームの走査量とその際にビーム位置検出器により検出する荷電粒子ビームのビーム位置とを記憶装置に記憶し、この記憶された走査量及びビーム位置を用い、制御装置により治療計画情報に基づくビーム位置に応じて走査装置の走査量を設定する。実際に照射して得られた走査量とビーム位置との関係が記憶装置に記憶されているため、正確に患部を照射することが期待できるものである。
【0009】
特許文献2には、高い安全性を確保し、高精度で荷電粒子ビームを照射できる粒子治療装置を提供することを目的とし、以下の発明が開示されている。特許文献2の発明は、荷電粒子ビーム発生装置から出射された荷電粒子ビームを、ビーム進行方向と垂直な照射面上に走査する走査電磁石に供給し、この走査電磁石を通過した荷電粒子ビームの照射面上における位置及び線量に基づいて、荷電粒子ビーム発生装置からの荷電粒子ビームの出射量を制御する。具体的には、照射面上で分割して形成される複数の領域のうち、目標線量に達した領域への荷電粒子ビームの供給を停止し、目標線量に達していない他の領域に荷電粒子ビームを供給する。このように、各領域における照射線量を目標線量と比較し、荷電粒子ビームの出射量をON/OFF制御(供給/停止)することによって、高い安全性を期待するものである。
【0010】
特許文献3には、走査電磁石の電流と磁場との間にあるヒステリシス特性がビーム照射位置の精度を低下させる課題に対して、以下の発明が開示されている。特許文献3の発明は、照射計画に基づくビーム照射位置に対応して、ヒステリシスの影響を考慮しない走査電磁石の電流値を演算する第1の演算手段と、第1の演算手段で演算した走査電磁石の電流値を、ヒステリシスの影響を考慮して補正演算する第2の演算手段とを有し、照射制御装置は、第2の演算手段の演算結果に基づいて走査電磁石の電流を制御する。このように第2の演算手段にヒステリシスの影響を排除するように補正演算を実施することで、すなわち、第2の演算手段にヒステリシス特性を表す数学モデルを有することにより、演算によりビーム照射位置の精度の向上を期待するものである。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2005−296162号公報
【特許文献2】特開2008−272139号公報
【特許文献3】特開2007−132902号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
特許文献1に開示された発明においては、実際に照射をして得られた荷電粒子ビームの走査量とビーム位置との実データに基づいて変換テーブルを作成し、この変換テーブルを用いて走査電磁石の設定電流値を演算している。
【0013】
しかしながら、実際には特許文献3に示されているように、走査電磁石の電流と磁場との間にはヒステリシス特性が存在し、電流値が増加しているときと、電流値が減少しているときとでは、異なった磁場となる。すなわち、ある瞬間における走査電磁石の電流値が分かったとしても、その情報からだけでは、磁場の正確な値を特定できない。したがって、特許文献1に開示されている発明では、電磁石のヒステリシスの影響により正確に患部を照射することができない問題点があった。
【0014】
特許文献2に開示された発明においては、定義した各領域における照射線量が目標線量となるよう、荷電粒子ビームの出射量をON/OFF制御(供給/停止)している。
【0015】
しかしながら、特許文献2に開示された発明に記載された照射面上で分割して形成される複数の領域は、対応する走査電磁石の励磁電流の範囲によって定義される励磁電流空間内の領域(励磁領域)であり、実際の照射空間内の領域(照射領域)とは一致しない。走査電磁石のヒステリシスを考慮しなければ、この励磁領域と照射領域が正確に1対1に対応することはないからである。したがって、このように励磁領域単位で照射線量を管理して安全性を高めようとした装置や方法においても、走査電磁石のヒステリシスの影響を排
除しなければ、小領域で線量を管理する効果を発揮できない。すなわち、走査電磁石のヒステリシスによりビーム照射位置の精度が悪くなるという問題点があった。
【0016】
特許文献3に開示された発明においては、演算手段の内部にヒステリシスの数学的モデルを作り、演算によって走査電磁石の電流値を補正している。
【0017】
しかしながら、ヒステリシスを考慮していても、特許文献3の発明のような考慮の仕方では、まだいくつか問題点がある。第1の問題点は、ヒステリシス特性を演算的な手法を用いて高精度に補正することは、実際にはかなり難しいということである。例えば、電流と磁場とのヒステリシス特性を表す曲線は、入力(電流)の振幅だけではなく、入力(電流)を変化させる速度や、変化させるパターンによって様々な様態となる。この複雑なヒステリシス現象を演算的手法、すなわち数学的モデルで表すことは、多くの分野で長年いろいろと研究工夫がなされてきているが、やはり現実的には難しい。また、第2の問題点は、ビーム照射位置の検出方法にある。従来の多くは、この特許文献3に開示された発明のように、1台もしくは複数のビーム位置モニタのみによってビーム照射位置を検出しようとしている。ビーム位置モニタは、荷電粒子ビームが照射されて、はじめてビーム照射位置が分かるものである。したがって、ビームがターゲットからはずれて正常組織等を照射してしまったとき、単にビームを停止することしかできず、本来照射すべきだった正しい照射位置へビーム照射位置を制御するといったことができない問題点があった。
【0018】
この発明は上記のような課題を解決するためになされたものであり、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現する粒子線照射装置を得ることを目的とする。
【課題を解決するための手段】
【0019】
走査電磁石の励磁電流を出力する走査電源と、走査電源を制御する照射制御装置とを備えた。照射制御装置は、励磁電流の指令値を生成する数学モデルを有し、走査電源に出力された励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、評価の結果に基づいて数学モデルを更新し、ランスルーの経験を蓄積し、蓄積されたランスルーの経験に基づいて数学モデルが生成する励磁電流の指令値を走査電源に出力する走査電磁石指令値学習生成器を備えた。
【発明の効果】
【0020】
この発明に係る粒子線照射装置は、ランスルーの結果を評価し、ランスルーの経験を蓄積し、蓄積されたランスルーの経験に基づいて数学モデルが生成する励磁電流の指令値をを走査電源に出力するので、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現することができる。
【図面の簡単な説明】
【0021】
【図1】この発明の実施の形態1における粒子線治療装置の概略構成図である。
【図2】図1の照射制御装置の構成図である。
【図3】図1の他の照射制御装置の構成図である。
【図4】磁場空間で定義した複数領域を示す図ある。
【図5】学習照射の際の点数表の例を示す図である。
【図6】この発明の実施の形態2における照射制御装置の構成図である。
【図7】この発明の実施の形態2における他の照射制御装置の構成図である。
【図8】この発明の実施の形態3における指令電流を生成する数学的モデルの例である。
【図9】この発明の実施の形態3における照射制御装置の構成図である。
【発明を実施するための形態】
【0022】
実施の形態1.
図1はこの発明の実施の形態1における粒子線治療装置の概略構成図である。粒子線治療装置は、ビーム発生装置51と、加速器52と、ビーム輸送装置53と、粒子線照射装置54と、治療計画装置55と、データサーバ56とを備える。なお、治療計画装置55を粒子線治療装置の構成部品とは考えず、独立して準備することも可能である。ビーム発生装置51は、イオン源で発生させた荷電粒子を加速して荷電粒子ビームを発生させる。加速器52は、ビーム発生装置51に接続され、発生した荷電粒子ビームを加速する。ビーム輸送装置53は、加速器52で設定されたエネルギーまで加速された後に出射される荷電粒子ビームを輸送する。粒子線照射装置54は、ビーム輸送系53の下流に設置され、荷電粒子ビームを照射対象15に照射する。
【0023】
治療計画装置55は、照射対象である患部15の3次元データに基づいて、照射条件などいくつかの治療の計画を立案し、粒子線治療をシミュレートすることができる。粒子線治療を行う医者が最終的に選択した治療計画は、ここで粒子線治療装置を駆動するためのコードに変換される。駆動するためのコードとは、例えばスポットスキャニングの場合であれば、照射層(レイヤー)Zi(下添え字iはレイヤー番号)ごとのスポットの座標Xj,Yj(下添え字jはスポット番号)及びそのスポットに照射する目標線量Djであり、また、ラスタースキャニング等の場合であれば、照射層(レイヤー)Ziごとの照射軌道を、サンプリング周期ごとの照射位置Xk,Yk(下添え字kはシーケンス番号)で表した時系列データ等である。ここで、スポットに照射する目標線量、としたのは、ブラッグピークの特性から、下層の照射の影響を上層が受けてしまうからであり、その箇所に必要な目標線量ではない。データサーバ56は、治療計画装置55で患者毎に生成した治療計画データ及び駆動するためのコードを記憶する。
【0024】
粒子線照射装置54は、ビーム輸送装置53から入射された入射荷電粒子ビーム1aを輸送するビーム輸送ダクト2と、入射荷電粒子ビーム1aに垂直な方向であるX方向及びY方向に入射荷電粒子ビーム1aを走査する走査電磁石3a、3bと、走査電磁石3a、3bが発生させる磁場を検出する磁場センサ20a、20bと、磁場データ変換器21と、ビーム位置モニタ7と、位置データ変換器8と、線量モニタ11と、線量データ変換器12と、照射制御装置5と、走査電源4とを備える。磁場センサ20a、20bは例えばピックアップコイルを有する磁場センサである。なお、図1に示したように入射荷電粒子ビーム1aの進行方向はZ方向である。
【0025】
走査電磁石3aは入射荷電粒子ビーム1aをX方向に走査するX方向走査電磁石であり、走査電磁石3bは入射荷電粒子ビーム1aをY方向に走査するY方向走査電磁石である。磁場センサ20aはX方向の磁場を検出するX方向磁場センサであり、磁場センサ20bはY方向の磁場を検出するY方向磁場センサである。磁場データ変換器21は磁場センサ20a、20bで検出した磁場を表すセンサの電気信号を、デジタルデータの測定磁場Bsに変換する。ビーム位置モニタ7は走査電磁石3a、3bで偏向された出射荷電粒子ビーム1bの通過位置を検出する。位置データ変換器8はビーム位置モニタ7で検出した通過位置を表すセンサの電気信号から、照射層(レイヤー)での照射位置を計算し、デジタルデータの測定位置座標Psを生成する。線量モニタ11は出射荷電粒子ビーム1bの線量を検出する。線量データ変換器12は、線量モニタ11で検出した線量を表すセンサの電気信号を、デジタルデータの測定線量Dsに変換する。
【0026】
照射制御装置5は、走査電源4への励磁電流の指令値である指令電流Ixk,Iykを出力し、各照射層(レイヤー)Ziにおける照射位置を制御する。走査電源4は照射制御装置5から出力された指令電流Ixk,Iykに基づいて、走査電磁石3a、3bへ実際
に駆動する励磁電流を出力する。
【0027】
図2は照射制御装置5の構成図である。照射制御装置5は、逆写像生成器30と、逆写像演算器22と、指令値出力器25と、指令評価器33と、指令更新器34と、走査電磁石指令値系列生成器35と、ビーム供給指令出力器26とを有する。走査電磁石指令値系列生成器35は指令値記憶装置36を有する。指令値出力器25と、指令評価器33と、指令更新器34と、走査電磁石指令値系列生成器35は、走査電磁石指令値学習生成器37を構成する。走査電磁石指令値学習生成器37は、走査電源4に出力された指令電流Ik=(Ixk,Iyk)による一連の照射動作であるランスルーの結果を評価し、評価の結果が所定の条件を満たさない場合に指令電流Ik=(Ixk,Iyk)を更新してランスルーが実行され、評価の結果が所定の条件を満たした指令電流Ik=(Ixk,Iyk)を走査電源4に出力する。
【0028】
照射制御装置5の動作について説明する。粒子線治療装置の照射には、大きく分けるとキャリブレーション時の試し照射と、治療時の本照射とがある。一般的にキャリブレーション時の試し照射は、いわゆる校正のための照射であり、患者のいない状態で、校正が必要なときのみ行う。X方向走査電磁石3aへの制御入力(電流Ix)とY方向走査電磁石3bへの制御入力(電流Iy)をいろいろな値にふって試し照射を行い、そのときのビーム照射位置を測定する。実施の形態1におけるキャリブレーション時の試し照射は、従来と同様に行うが、スポットスキャニング的に荷電粒子ビームの供給及び停止を行い、試し照射時において、ビームの測定位置座標Ps(xs,ys)だけではなく、磁場センサ20a,20bにより測定磁場Bs(Bxs,Bys)をも測定する。試し照射をスポットスキャニング的に行うことで、ビームの測定位置座標Ps(xs,ys)を明確に測定することができる。このときの走査電磁石3の測定磁場Bs(Bxs,Bys)とビームの測定位置座標Ps(xs,ys)との関係は、逆写像生成器30によって生成された逆写像演算器22の数式モデルとして実現する。
【0029】
あらかじめ、試し照射用に指令電流Il=(Ixl,Iyl)(下添え字lは試し照射のスポット番号を表す)を用意する(ステップS001)。試し照射用の指令電流Il=(Ixl,Iyl)は、照射されるスポットが、粒子線照射装置54の想定した照射範囲内で照射されるように用意する。指令値出力器25は、指令電流Il=(Ixl,Iyl)を走査電源4に出力する(ステップS002)。走査電源4は、指令電流Il=(Ixl,Iyl)に従って走査電磁石3を制御する(ステップS003)。
【0030】
ビーム供給指令出力器26は、指令値出力器25と同期して、走査電磁石3a、3bの磁場が整定するに十分な整定時間を待って、ビーム発生装置51にビームの発生を指示するビーム供給指令Sstartを出力する。ビーム発生装置51は荷電粒子ビームの照射を開始する。試し照射に必要な照射時間Ton経過後、ビーム発生装置51にビームの停止を指示するビーム停止指令Sstopを出力し、ビーム発生装置51は荷電粒子ビームの照射を停止する。
【0031】
指令電流Il=(Ixl,Iyl)により制御された走査電磁石3a、3bの磁場を、磁場センサ20a、20bにより測定する。試し照射のスポット毎に測定された測定磁場Bl=(Bxl,Byl)は、磁場データ変換器21を介して逆写像生成器30に入力される。
【0032】
ビーム位置モニタ7により、スポット毎に走査電磁石3で走査された出射荷電粒子ビーム1bの照射位置座標Pl=(Xl,Yl)を算出する。照射位置座標Pl=(Xl,Yl)は、位置データ変換器8を介して逆写像生成期30に入力される。
【0033】
逆写像生成器30は、全スポットの測定磁場Bl=(Bxl,Byl)及び照射位置座標Pl=(Xl,Yl)を、内蔵された記憶装置であるメモリに記憶する(ステップS004)。
【0034】
逆写像生成器30は、記憶した測定磁場Bl=(Bxl,Byl)及び照射位置座標Pl=(Xl,Yl)に基づいて数式モデルを作成し、作成した数式モデルを逆写像演算器22に格納する(ステップS005)。
【0035】
逆写像演算器22の数式モデルは、好適な一例として、多項式を用いて実現する。従来の変換テーブルとは異なり、逆写像演算器22としたことについて説明をする。走査電磁石3の仕様、走査電源4の仕様、及び照射ビームの仕様(照射エネルギー、入射ビーム位置など)が一定であるという仮定のもとでは、走査電磁石3の磁場B(Bx,By)が決まれば、ビームの照射位置座標P(x,y)が一意に決まるので、磁場Bとビームの照射位置座標Pとの関係に関する物理現象は2入力2出力の正写像と捉えることができる。
【0036】
しかし、治療における本照射の際は、ビームの目標照射位置座標Pobj=(Pxobj,Pyobj)が先に与えられて、そのビームの目標照射位置座標Pobj=(Pxobj,Pyobj)を実現するように走査電磁石3の磁場B(Bx,By)を制御しなければならない。つまり、治療における本照射ではビームの目標照射位置座標Pobj=(Pxobj,Pyobj)から、その目標照射位置座標Pobj=(Pxobj,Pyobj)を実現するように走査電磁石3の磁場B(Bx,By)の推定値Best=(▲Bx▼,▲By▼)を算出しなければならない(▲Bx▼及び▲By▼の説明は、数式(1)及び数式(2)参照)。このように、本照射では位置から磁場への、逆向きの写像が必要であることに注意する。したがって、磁場B(Bx,By)の推定値Bestを得るために逆写像演算器22が必要となる。
【0037】
逆写像演算器22の数式モデルを多項式にて実現する方法の概略を説明する。ここで多項式とは、数学で一般的に定義されている多項式(polynomial)であり、「定数及び不定元の和と積のみからなる式」などと定義されている。具体的には、例えば以下の数式に示すようなものである。
【0038】
【数1】
【0039】
【数2】
ここで、m00、m01、m02、m10、m11、m20、n00、n01、n02、n10、n11、n20は未知パラメータ定数である。また、Pxobj、Pyobjは多項式の不定元に相当する。また、数式(1)の左辺(Bの上に小⌒が付いたBx、これを▲Bx▼で示す。)はBxの推定値であり、数式(2)の左辺(Bの上に小⌒が付いたBy、これを▲By▼で示す。)はByの推定値であることを示す。磁場B(Bx,By)の推定値Bestは(▲Bx▼,▲By▼)である。
【0040】
多項式の未知パラメータ定数は、試し照射の測定磁場Bl=(Bxl,Byl)及び照射位置座標Pl=(Xl,Yl)に基づいて、最小二乗法などにより求める。
【0041】
目標照射位置座標Pobj=(Pxobj,Pyobj)を実現する磁場B=(Bx,By)の推定値Bestは、求めた未知パラメータ定数を代入した数式(1)、数式(2)により求める。
【0042】
従来技術においては、キャリブレーションの走査電磁石3への制御入力(指令電流Il=(Ixl,Iyl))とビームの照射位置座標Pl=(Xl,Yl)との関係を、変換テーブルとして作成し、走査電磁石指令値生成器6にこの変換テーブルを記憶しておく方式であった。
【0043】
すなわち、X方向走査電磁石3aへの制御入力(指令電流Ixl)はビームの目標照射位置Pobjのx座標(Pxobj)から、Y方向走査電磁石3bへの制御入力(指令電流Iyl)はビームの目標照射位置Pobjのy座標(Pyobj)から、それぞれ独立に求めていた。
【0044】
しかし、実際にはX方向走査電磁石3aへの制御入力(指令電流Ixl)はビームの照射位置Pのx座標にもy座標にも、また、Y方向走査電磁石3bへの制御入力(指令電流Iyl)もビーム照射位置Pのx座標にもy座標にも影響を与える、すなわち干渉項があるので、独立に求める変換テーブルによる手法では、照射位置精度は劣化する。
【0045】
実施の形態1の粒子線照射装置54は、目標照射位置座標Pobj=(Pxobj,Pyobj)を実現する磁場B=(Bx,By)の推定値Bestを求めるにあたり、前記干渉項を考慮した数式モデルを逆写像演算器22に実現したので、従来とは異なり、出射荷電粒子ビーム1bの照射位置精度を向上させることができる。
【0046】
次に実施の形態1の粒子線治療装置における本照射について説明する。本照射は、ビーム照射位置及び線量の制御を最適化する学習照射と、患者の照射対象15にビームを照射する治療照射に分かれる。学習照射は以下の手順により行う。
【0047】
或る照射対象15に対して、治療計画装置55で作成された治療計画のうち医者が最終的に選択したものが、粒子線治療装置を駆動するためのコードに変換され、照射制御装置5に送られる(ステップS101)。ここでは、学習照射及び治療照射はラスタースキャニングを想定し、駆動するためのコードが照射層(レイヤー)Zi(下添え字iはレイヤー番号)ごとの照射軌道をサンプリング周期ごとの照射位置Pk(Xk,Yk)(下添え字kはシーケンス番号)で表した時系列データであるとして説明する。
【0048】
学習照射のための指令電流Ik=(Ixk,Iyk)(下添え字kはシーケンス番号)は後述する方法により作成する(ステップS102)。学習照射は、患者のいない状態で、学習照射のための指令電流Ik=(Ixk,Iyk)に従って、ランスルーを行う。
【0049】
学習照射のための指令電流Ik=(Ixk,Iyk)は、その候補としては、あるいは学習の初期値としては、極論すれば何でもよい。ここでは、従来技術による方法で求めたものを初期値とする。学習照射のための指令電流は、aIk=(aIxk,aIyk)(ただし、aは学習の回数であり、初期値の場合a=0とする。)と表し、学習により指令電流が更新されることを明記する。
【0050】
また、走査電磁石指令値系列生成器35は、指令値記憶装置36に指令電流aIk=(
aIxk,aIyk)を記憶させる。指令電流aIk=(aIxk,aIyk)は、下添え字kがシーケンス番号を表す、サンプリング周期ごとの制御入力である。患者のいない状態で初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーを行う(ステップS103)。
【0051】
粒子線治療装置の操作者の、学習照射開始指示により、信号生成器29が生成した本照射開始信号Stがビーム供給指令出力器26及び走査電磁石指令値系列生成器35に送られる。走査電磁石指令値系列生成器35は、学習0回目の指令電流0Ik=(0Ixk,0Iyk)を、サンプリング周期毎に、シーケンス番号順に出力する。
【0052】
ビーム供給指令出力器26は、本照射開始信号Stを受けて、ビーム発生装置51にビームを発生するビーム供給指令Sstartを出力する。ビーム発生装置51は荷電粒子ビームの照射を開始する。
【0053】
ビーム位置モニタ7により出射荷電粒子ビーム1bの通過位置は検出され、位置データ変換器8により計算された測定位置座標PsであるaPkは指令評価器33に入力される。指令評価器33は目標照射位置である照射位置Pk(Xk,Yk)と測定位置座標PsであるaPk(aXk,aYk)を比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う(ステップS104)。ランスルーの採点方法については後述する。
【0054】
信号生成器29は、本照射が終了する時間に本照射終了信号Seを送信する。本照射が終了する時間とは、本照射が開始された時間からサンプリング周期×k(シーケンス総数)だけ経過した時間である。ビーム供給指令出力器26は、本照射終了信号Seを受けて、ビーム発生装置51にビームを停止するビーム停止指令Sstopを出力する。ビーム発生装置51はビーム停止指令Sstopを受けて、荷電粒子ビーム1aを停止する(ステップS105)。
【0055】
指令更新器34は、指令評価器33から出力された評価結果である採点結果に基づいて、学習a=0回目の指令電流aIk=(aIxk,aIyk)の一部のシーケンスを変更の対象に決定し、当該シーケンスを変更する(ステップS106)。例えば学習a=0回目の指令電流0Ik=(0Ixk,0Iyk)の第3シーケンス0I3=(0Ix3,0Iy3)を、0Ix3から0Ix3+ΔIのように少し変更する。
【0056】
次に、患者のいない状態で、一部のシーケンスを少し変更した指令電流を用いて、再度、ランスルーを行う(ステップS107)。すなわち、ステップS103乃至ステップS105を第2のランスルーとして実行する。
【0057】
一部のシーケンスを少し変更したことによって、採点結果がJ点からJ+ΔJ点だけ変わったとする。すると、指令電流の第3のシーケンス0Ix3は、ΔJ/ΔIの情報を用いて更新すればよいことがわかる。一般的な学習機能と同様に、ΔIが正の場合に採点結果が悪ければ、ΔIを負にする等の更新を行えばよい。この作業は、採点結果が影響を受けるすべてのシーケンスについて実行するとよい。この更新で、学習が1回(aをインクリメント(a+1)する)とカウントする。
【0058】
指令更新器34は、更新した学習a=1回目の指令電流aIk=(aIxk,aIyk)を作成する(ステップS108)。第2回のランスルーが前回のランスルーよりも採点結果がよいことを確認し、学習を続ける。学習は、あらかじめ設定した条件(合格点等)を満たすまで繰り返す。最終的に学習が終了した指令電流aIk=(aIxk,aIyk)は、指令値記憶装置36に記憶する。また、学習の結果、直前のランスルーよりも採点
結果が悪くなった場合は、更新の速度(1回で更新する量)を少なくする、あるいは上記で説明したように指令電流を更新する等の工夫をする。
【0059】
治療照射は以下の手順により行う。粒子線治療装置の操作者の治療照射開始指示により、本照射開始信号Stがビーム供給指令出力器26及び走査電磁石指令値系列生成器35に送られる。査電磁石指令値系列生成器35は、学習が終了した指令電流aIk=(aIxk,aIyk)を、サンプリング周期毎に、シーケンス番号順に出力する。
【0060】
ビーム供給指令出力器26は、本照射開始信号Stを受けて、ビーム発生装置51にビームを発生するビーム供給指令Sstartを出力する。ビーム発生装置51は荷電粒子ビームの照射を開始する(ステップS109)。
【0061】
信号生成器29は、本照射が終了する時間に本照射終了信号Seを送信する。本照射が終了する時間とは、本照射が開始された時間からサンプリング周期×k(シーケンス総数)だけ経過した時間である。ビーム供給指令出力器26は、本照射終了信号Seを受けて、ビーム発生装置51にビームを停止するビーム停止指令Sstopを出力する。ビーム発生装置51はビーム停止指令Sstopを受けて、荷電粒子ビーム1aを停止する(ステップS110)。
【0062】
次にランスルーの採点方法について説明する。最も直接的な採点方法(第1の採点方法)は、ラスタースキャニング用の駆動するためのコード、すなわち、照射層(レイヤー)Ziごとの照射軌道を、サンプリング周期ごとの照射位置Pk(Xk,Yk)(下添え字kはシーケンス番号)で表した時系列データと、実際にランスルーをしたときのサンプリング周期ごとの照射位置aPk(aXk,aYk)(aは学習の回数)を比較して、以下の評価関数を考えることである。この評価関数の値が、所定の値になった場合(所定の条件を満たした場合)に学習を終了する。
【0063】
【数3】
【0064】
また、ランスルーの採点は、照射線量に着目して、以下の方法(第2の採点方法)で行うこともできる。ランスルーの採点は、図4に示すように磁場空間内で定義した複数の小領域毎に、目標線量Diと測定線量Dsとを比較し、図5に示す点数表Tにしたがって採点を行う。ランスルーの評価は、例えば、磁場空間内で定義した複数の小領域毎の点数を加えたものを評価関数として定義し、この評価関数の点数により評価を行う。評価関数の点数が高くなったランスルーは点数が低いものより優れていると判定する。図4は磁場空間(Bx,By)で定義した磁場小領域Si,jを示す図であり、図5は学習照射の際の点数表Tの例を示す図である。なお、小領域に対応した目標線量Diは、治療計画装置により計算され与えられる。測定線量Dsは、ビーム位置モニタ7の測定結果と、荷電粒子ビーム1bが前記小領域を通過した時間等から求める。
【0065】
なお、ランスルーの第2の採点方法においては、図3に示すように、指令評価器33に入力される信号が異なる。これに伴いステップS104も異なる。図3はランスルーの第2の採点方法を採用した照射制御装置の構成図である。照射制御装置5bの走査電磁石指令値学習生成器37bの指令評価器33bには目標線量Di及び測定線量Ds(aDk)が入力される。ステップS104において、線量モニタ11により線量が検出され、線量
データ変換器12により変換された測定線量Dsは指令評価器33bに入力される。指令評価器33bは目標線量Diと測定線量Dsを比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う。
【0066】
図4において、表の左列の(B0,B1)は、磁場BのX成分BxがB0≦Bx<B1の関係を満たすことを簡略して示したものであり、同様に(Bm−1,Bm)は、BxがBm−1≦Bx<Bmの関係を満たすことを簡略して示したものである。表の上段の(B0,B1)は、磁場BのY成分ByがB0≦By<B1の関係を満たすことを簡略して示したものであり、同様に(Bm−1,Bm)は、ByがBm−1≦By<Bmの関係を満たすことを簡略して示したものである。領域S0,0はB0≦Bx<B1及びB0≦By<B1の関係を満たす領域であり、領域Sm−1,m−1はBm−1≦Bx<Bm及びBm−1≦By<Bmの関係を満たす領域である。
【0067】
ランスルーの採点は、粒子線照射装置54の照射可能範囲に対応する磁場空間の全領域で行う。これにより患者の照射対象15は目標線量Diで管理され、照射対象15ではない正常組織相当箇所は線量が零で管理されるので、照射対象15及び非照射対象の荷電粒子ビームの線量管理を精度良く行うことができる。
【0068】
走査電磁石3の磁場が決まれば、荷電粒子ビームの照射位置は唯一に決まる。言い換えれば、走査電磁石3の磁場と、荷電粒子ビームの照射位置は1対1の関係にある。したがって、従来技術の指令値電流空間で定義された領域のような走査電磁石のヒステリシスの影響を受けることがない。また、キャリブレーションのときに荷電粒子ビームを照射して得られた磁場センサ20による磁場とビーム位置モニタ7によるビーム位置との関係は、キャリブレーションのときと同様に荷電粒子を走査する場合の本照射の際の磁場とビーム位置との関係とは、極めてよく一致する。実照射空間は、荷電粒子ビームの出射位置、ビーム位置モニタ7における通過位置、粒子線照射装置54と照射対象15との位置関係により求めることができるので、実照射空間の領域は磁場空間で定義された領域と写像関係を有し、本照射の際にもこの写像関係はほとんど変わらない。したがって、ランスルーの採点を磁場空間内で定義した複数の磁場小領域Si,j毎に行い、この磁場小領域Si,j毎に荷電粒子ビームの線量管理を行うので、照射対象15における実照射空間での線量管理を精度よく行うことができる。
【0069】
図5に示した学習照射の際の点数表Tは減点方式の例である。線量誤差deは領域測定線量Dssから目標線量Diを引いた差である。領域測定線量Dssは磁場空間(Bx,By)で定義した磁場小領域Si,jの実照射線量であり、磁場センサ20で測定した測定磁場Bsと、線量モニタ11で測定した測定線量Dsにより作成する。Δdは線量誤差の幅であり、許容範囲である所定の値に設定される。測定線量Dsが目標線量Diを超過した場合における点数の変化率の絶対値は、測定線量Dsが目標線量Diに満たない場合における点数の変化率の絶対値よりも大きくしている。これにより測定線量Dsが目標線量Diを超過した場合の修正を迅速に的確に行うことができる。
【0070】
実施の形態1の第1の採点方法を適用した粒子線照射装置54は、実際の照射位置を評価関数としているため、走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。また、実施の形態1の第2の採点方法を適用した粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に目標線量Diと領域測定線量Dssから点数をつけ、この点数により評価関数を定義したことにより、走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。したがって、高精度で安全性の高い粒子線照射装置を提供することができる。
【0071】
粒子線照射装置54は、第1の採点方法で、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響が反映された実際の照射位置を評価関数として走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習しているため、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。また、第2の採点方法で、粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に荷電粒子ビームの線量管理を行うので、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。したがって走査電磁石のヒステリシスの影響を排除し、高精度なビーム照射を実現することができる。
【0072】
磁場センサ20は、ホール素子を有する磁場センサでも構わない。ホール素子を用いることで走査電磁石3により発生された磁場の絶対値を測定でき、ピックアップコイルで計測された電圧を積分等の演算を行う必要がなくなる。したがって磁場データ変換器21を簡略化、小型化することができる。
【0073】
磁場センサ20として最も望ましいのは、ビックアップコイルとホール素子の両方を備えるものである。ホール素子の、磁場の絶対値が測定できるという利点と、ピックアップコイルの、磁場の変化分をヒステリシスがなく測定できるという利点との、両方を取り入れることができるからである。
【0074】
従来の粒子線照射装置は、1台もしくは複数のビーム位置モニタのみによってビーム照射位置を検出して、測定位置座標により荷電粒子ビームのフィードバック制御をしていた。位置モニタなどの荷電粒子ビームを遮るものを多く配置することは、ビームが散乱拡大することにつながり、所望のビームスポット径が得られないといった問題点があった。
【0075】
実施の形態1の粒子線照射装置54は、治療照射の際には走査電磁石指令値系列生成器35は学習が終了した指令電流aIk=(aIxk,aIyk)を、サンプリング周期毎に、シーケンス番号順に出力して荷電粒子ビームの照射位置及び照射線量の制御を行ったので、本照射の際にビーム位置モニタ7を図示しない移動装置により移動させ、出射荷電粒子ビーム1bがビーム位置モニタ7を通過しないようにしてもよい。このようにすることでビーム位置モニタ7によって出射荷電粒子ビーム1bが散乱し拡大されることを防止できる。これにより、ビームスポット径を小さくできる。したがって、小さなビーム径で照射する方がよい場合には、適したスポット径で治療を行うことができる。
【0076】
また、指令値出力器25が、走査電磁石3の磁場B(Bx,By)の推定値Bestに基づいて指令電流Ik=(Ixk,Iyk)を生成し、これを初期値として実行したランスルーにより学習することもできる。
【0077】
なお、照射制御装置5に逆写像生成器30、逆写像演算器22を有する例で説明したが、逆写像生成器30、逆写像演算器22がない場合であっても、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現することができることは言うまでもない。
【0078】
以上のように実施の形態1の粒子線照射装置54によれば、走査電磁石3の励磁電流を出力する走査電源4と、走査電源4を制御する照射制御装置5とを備え、照射制御装置5は、走査電源4に出力された励磁電流の指令値Ikによる一連の照射動作であるランスルーの結果を評価し、評価の結果が所定の条件を満たさない場合に励磁電流の指令値Ikを更新してランスルーが実行され、評価の結果が所定の条件を満たした励磁電流の指令値Ikを走査電源4に出力する走査電磁石指令値学習生成器37を有したので、走査電磁石指令値学習生成器37がランスルーの結果に基づいて、走査電源4への励磁電流の指令値Ikを好適なものに学習でき、走査電磁石のヒステリシスの影響を排除し、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を実現することができる。
【0079】
実施の形態1の粒子線治療装置によれば、荷電粒子ビームを発生させるビーム発生装置51と、ビーム発生装置51で発生された荷電粒子ビームを加速する加速器52と、加速器52により加速された荷電粒子ビームを輸送するビーム輸送装置53と、ビーム輸送装置53で輸送された荷電粒子ビームを走査電磁石3で走査して照射対象15に照射する粒子線照射装置54とを備え、粒子線照射装置54は、走査電磁石3の励磁電流を出力する走査電源4と、走査電源4を制御する照射制御装置5とを備え、照射制御装置5は、走査電源4に出力された励磁電流の指令値Ikによる一連の照射動作であるランスルーの結果を評価し、評価の結果が所定の条件を満たさない場合に励磁電流の指令値Ikを更新してランスルーが実行され、評価の結果が所定の条件を満たした励磁電流の指令値Ikを走査電源4に出力する走査電磁石指令値学習生成器37を有したので、走査電磁石指令値学習生成器37がランスルーの結果に基づいて、走査電源4への励磁電流の指令値Ikを好適なものに学習でき、走査電磁石のヒステリシスの影響が排除され、ラスタースキャニングやハイブリッドスキャニングにおいて高精度なビーム照射を使用して高精度な粒子線治療を実現することができる。
【0080】
実施の形態2.
実施の形態1では、本照射の学習照射において荷電粒子ビームの照射を行ったが、荷電粒子ビームの照射を行わずに学習し、指令電流Ik=(Ixk,Iyk)を最適化することができる。以下に説明する。実施の形態2の粒子線治療装置では、学習照射のランスルーの採点として2種類のランスルーの採点方法(第3の採点方法、第4の採点方法)を用いることができる。第3の採点方法は、ラスタースキャニング用の駆動するためのコード、すなわち、照射層(レイヤー)Ziごとの照射軌道を、サンプリング周期ごとの照射位置Pk(Xk,Yk)(下添え字kはシーケンス番号)に対応した磁場の推定値BestであるBk=(Bxk,Byk)で表した時系列データと、実際にランスルーをしたときのサンプリング周期ごとの測定磁場aBk(aBxk,aByk)(aは学習の回数)を比較して、以下の評価関数を考えることである。なお、磁場の推定値Bkは逆写像演算器22で演算したものである。
【0081】
【数4】
【0082】
第4の採点方法は、図5に示す点数表Tにしたがって採点を行う方法である。しかし、学習照射の際に荷電粒子ビームの照射が行われないので、線量誤差deは、実施の形態1とは異なり、領域線量計算値Dscから目標線量Diを引いた差とする。領域線量計算値Dscは磁場センサ20で測定した測定磁場aBk(aBxk,aByk)から、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に出射荷電粒子ビーム1bが滞在する時間分で線量を積分して求める。
【0083】
図6はこの発明の実施の形態2における照射制御装置の構成図であり、学習照射のランスルーの採点として第3の採点方法を採用したものである。実施の形態1の照射制御装置とは指令評価器33に入力される信号が異なる。照射制御装置5cの走査電磁石指令値学習生成器37cの指令評価器33cには磁場の推定値Bk=(Bxk,Byk)及び測定磁場aBk(aBxk,aByk)が入力される。実施の形態2における照射制御装置5
cの動作について説明する。キャリブレーション時の試し照射は実施の形態1のステップS001乃至ステップS005と同様である。学習照射は、基本的に実施の形態1のステップS101乃至ステップS108と同様であるが、荷電粒子ビームの照射を行わないので、ステップS104が異なる。実施の形態1のステップS104の代わりにステップS201を実行する。
【0084】
指令電流Ik=(Ixk,Iyk)により制御された走査電磁石3a、3bが発生する磁場を、磁場センサ20a、20bにより測定する。磁場センサ20により測定され、磁場データ変換器21で変換された測定磁場aBk(aBxk,aByk)は指令評価器33cに入力される。指令評価器33cは、シーケンス番号毎に逆写像演算器22で演算された磁場の推定値Bk=(Bxk,Byk)と測定磁場aBk(aBxk,aByk)を比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う(ステップS201)。
【0085】
次に、学習照射のランスルーの採点として第4の採点方法を採用した場合の照射制御装置及び動作を説明する。図7はこの発明の実施の形態2における他の照射制御装置の構成図であり、学習照射のランスルーの採点として第4の採点方法を採用したものである。実施の形態1の照射制御装置とは指令評価器33に入力される信号が異なる。照射制御装置5dの走査電磁石指令値学習生成器37dの指令評価器33dには目標線量Di及び領域線量計算値Dscが入力される。実施の形態2における照射制御装置5dの動作について説明する。キャリブレーション時の試し照射は実施の形態1のステップS001乃至ステップS005と同様である。学習照射は、基本的に実施の形態1のステップS101乃至ステップS108と同様であるが、荷電粒子ビームの照射を行わないので、ステップS104が異なる。実施の形態1のステップS104の代わりにステップS202を実行する。
【0086】
指令電流Ik=(Ixk,Iyk)により制御される荷電粒子ビーム1が磁場小領域Si,j毎に滞在する時間分で積分され、領域線量計算値Dscが計算され、指令評価器33dに入力される。指令評価器33cは、目標線量Diと領域線量計算値Dscを比較し、初期値の指令電流0Ik=(0Ixk,0Iyk)のランスルーの採点を行う(ステップS202)。
【0087】
実施の形態2の第3の採点方法を適用した粒子線照射装置54は、測定磁場を評価関数としているため、荷電粒子ビームを照射しなくても走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。また、実施の形態2の第4の採点方法を適用した粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に計算された領域線量計算値Dscと目標線量Diから点数をつけ、この点数により評価関数を定義したことにより、荷電粒子ビームを照射しなくても走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習することができる。したがって、高精度で安全性の高い粒子線照射装置を提供することができる。
【0088】
粒子線照射装置54は、第3の採点方法で、測定磁場を評価関数として走査電磁石3への指令電流aIk=(aIxk,aIyk)を好適なものに学習しているため、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。また、第4の採点方法で、粒子線照射装置54は、磁場空間(Bx,By)で定義した磁場小領域Si,j毎に荷電粒子ビームの線量管理を行うので、走査電磁石3の電流と磁場との間に生じるヒステリシスの影響を排除することができる。したがって走査電磁石のヒステリシスの影響を排除し、高精度なビーム照射を実現することができる。
【0089】
また、学習照射のランスルーは荷電粒子ビームを照射しないで行うことができるので、
無用なエネルギー消費を抑えることができる。
【0090】
実施の形態3.
学習機能とは、「ひとつの課題に対して、より理想的な解に近づく機能」というふうに解釈することができる。実施の形態1及び2では、治療計画装置55で患者毎に生成したひとつの治療計画データに、いかに実際の照射を近づけるかという課題に対して、より理想的な照射を実現する指令電流Ik=(Ixk,Iyk)を生成する機能について説明した。
【0091】
制御工学におけるよりアドバンストな学習機能(或いはよりインテリジェントな学習機能)とは、「過去の経験の蓄積により、未来の未知な課題に対して、より理想的な解を導けるための機能」と解釈される。そこで、実施の形態3においては、実施の形態1や2で説明した学習機能をさらに応用し、よりアドバンストな学習機能を備えた粒子線照射装置及び粒子線治療装置について説明する。
【0092】
実施の形態1において、学習照射は、ランスルーの採点を行い、採点結果に基づいて、指令電流Ik自身をより最適なものへと更新していった。この方法は、ひとつの治療計画データに対して、より理想的な照射を実現する指令電流Ikは生成できるが、ここでの経験は、他の治療計画データへは反映することができない。
【0093】
実施の形態3においては、学習照射は実施の形態1若しくは2と同様にランスルーの採点を行う。しかし、ランスルーの採点結果に基づいて、指令電流Ik=(Ixk,Iyk)自身を更新するのではなく、指令電流Ik=(Ixk,Iyk)を生成する数学的モデルを備えるようにし、その数学的モデルのパラメータをより最適なものへと更新するようにする。以下は、その詳細を説明したものである。
【0094】
図8は、実施の形態3における、前記指令電流Ik=(Ixk,Iyk)を生成する数学的モデルの例を表した図である。図8に基づいて、指令電流Ik=(Ixk,Iyk)を生成する仕組みを説明する。
【0095】
単層の隠れ層をもつフィードフォワード型NN(ニューラルネットワーク、以下「NN」。)60は、前記指令電流Ik=(Ixk,Iyk)を生成する数学的モデルの一例である。入力層61は、NN60の入力部であり、本発明の実施の形態3では目標であるサンプリング周期ごとの照射位置Pk(Xk,Yk)が該当する。入力層61aにXkが入力され、入力層61bにYkが入力される。出力層63は、NN60の出力部であり、本発明の実施の形態3では指令電流Ik=(Ixk,Iyk)が該当する。出力層63aにIxkが出力され、出力層63bにIykが出力される。隠れ層62は、NN60の基底関数(活性化関数)であり、複数の隠れ層62a〜62nにより、入力層61a、61bからの入力信号に対して重みを与え、出力層63a、63bへと出力する。
【0096】
粒子線治療装置においては、走査電磁石3により荷電粒子ビーム1が偏向され、その照射位置が決定される。すなわち、走査電磁石3への一連の指令電流Ik=(Ixk,Iyk)が決まれば、ビームの照射位置座標P=(X,Y)が一意に決まるので、一連の指令電流Ik=(Ixk,Iyk)からビームの照射位置座標Pへの物理現象は、ヒステリシス特性というダイナミクスを有する2入力2出力のシステムと捉えることができる。NN60で実現しようとしているのは、まさにこのヒステリシス特性のダイナミクスを有する2入力2出力の逆システムを、数学的に実現しようとするものである。
【0097】
実施の形態1及び2では、学習照射における更新は、指令電流Ik=(Ixk,Iyk)自身であった。それに対し、実施の形態3では、NN60の隠れ層62における重みを更新するようにした。図9にNN60を有する走査電磁石指令値系列生成器35bを備えた照射制御装置5(5e)を示す。照射制御装置5eは、実施の形態1の照射制御装置5aから、逆写像生成器30、逆写像演算器22、指令値出力器25、指令更新器34が削除され、走査電磁石指令値学習生成器37eにパラメータ更新器38を有し、走査電磁石指令値系列生成器35にNN60が搭載された例である。照射制御装置5eは、学習照射のランスルーの採点方法を第1の採点方法とした場合である。パラメータ更新器38は指令評価器33の評価結果が所定の条件になるようにNN60のパラメータである隠れ層62における重みを更新する。NN60を有する走査電磁石指令値系列生成器35bを備えた照射制御装置5は、学習照射のランスルーの採点方法を第2乃至4の採点方法とすることもできる。この場合は、図9の指令評価器33aに代えて、それぞれ指令評価器33b乃至33dにすればよい。なお、第3の採点方法の場合、照射制御装置5は逆写像生成器30、逆写像演算器22を備え、磁場の推定値Bkを逆写像演算器22で演算したものとすればよい。
【0098】
以上のように構成することにより、本発明の実施の形態3による粒子線治療装置においては、過去に行った治療計画データに対する学習照射のランスルー(学習ランスルー)の経験が蓄積される。多くの学習ランスルーの経験が蓄積された場合は、あらたな治療計画データに対し、毎回学習ランスルーをする必要がなく、効率的に、走査電磁石のヒステリシスの影響を受け難い、高精度な照射を行う粒子線治療装置を得られる。
【0099】
なお、実施の形態1乃至3で説明した学習アルゴリズムは、ほんの一例であり、最急降下法、遺伝的アルゴリズムなど、他の技術分野で実施されている別のアルゴリズムを応用してもよい。
【0100】
また、ランスルーの評価における評価関数は、ここで説明したものに限らず、他の評価関数を用いても構わない。数式(3)や数式(4)のシーケンス番号k毎に重み付けを付けてもよい。また磁場空間内で定義した複数の小領域毎に点数を付ける場合に、小領域毎の点数Sci,jに重み付けwi,jを行ったものを加えた評価関数でもよい。これらの場合は重要な位置や領域を精度よく最適化を行うことができる。
【産業上の利用可能性】
【0101】
この発明に係る粒子線照射装置および粒子線治療装置は、医療用や研究用に用いられる粒子線治療装置に好適に適用できる。
【符号の説明】
【0102】
1 荷電粒子ビーム 1a 入射荷電粒子ビーム
1b 出射荷電粒子ビーム 3 走査電磁石
3a X方向走査電磁石 3b Y方向走査電磁石
4 走査電源 7 ビーム位置モニタ
11 線量モニタ 15 照射対象
20 磁場センサ 20a X方向電磁石用磁場センサ
20b Y方向電磁石用磁場センサ 22 逆写像演算器
33 指令評価器 34 指令更新器
35 走査電磁石指令値系列生成器 35a 走査電磁石指令値系列生成器
35b 走査電磁石指令値系列生成器 37 走査電磁石指令値学習生成器
37a 走査電磁石指令値学習生成器 37b 走査電磁石指令値学習生成器
37c 走査電磁石指令値学習生成器 37d 走査電磁石指令値学習生成器
37e 走査電磁石指令値学習生成器 38 パラメータ更新器
51 ビーム発生装置 52 加速器
53 ビーム輸送装置 54 粒子線照射装置
60 NN(ニューラルネットワーク) Ps 測定位置座標
aPk 照射位置 Pk 照射位置
Ds 測定線量 aDk 測定線量
Di 目標線量 Bs 測定磁場
aBk 測定磁場 Best 磁場の推定値
Bk 磁場の推定値 Dss 領域測定線量
Dsc 領域線量計算値 de 線量誤差
T 点数表 Si,j 磁場小領域
Ik 指令電流
【特許請求の範囲】
【請求項1】
加速器により加速された荷電粒子ビームを走査するヒステリシスのある走査電磁石と、前記走査電磁石を駆動する励磁電流を出力する走査電源と、
前記走査電源を制御する照射制御装置とを備えた粒子線照射装置であって、
前記照射制御装置は、
前記励磁電流の指令値を生成する数学モデルを有し、前記走査電源に出力された前記励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、前記評価の結果に基づいて前記数学モデルを更新し、前記ランスルーの経験を蓄積し、蓄積された前記ランスルーの経験に基づいて前記数学モデルが生成する前記励磁電流の指令値を前記走査電源に出力する走査電磁石指令値学習生成器を備えたことを特徴とする粒子線照射装置。
【請求項2】
前記走査電磁石指令値学習生成器は、
前記励磁電流の指令値を生成する前記数学モデルと、
前記走査電源に出力された前記励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、前記評価の結果に基づいて前記数学モデルを更新し、前記ランスルーの経験を蓄積する学習機能手段と、
前記学習機能手段により蓄積する最新の経験に基づいて前記数学モデルが生成する前記励磁電流の指令値を前記走査電源に出力する走査電磁石指令値系列生成器を備えたことを特徴とする請求項1記載の粒子線照射装置。
【請求項3】
前記数学モデルは、前記荷電粒子ビームが照射される照射対象における目標照射位置座標に基づいて前記励磁電流の指令値を生成することを特徴とする請求項1または2に記載の粒子線照射装置。
【請求項4】
記数学モデルは、前記走査電磁石のヒステリシス特性のダイナミックスを有する前記励磁電流の指令値から前記荷電粒子ビームの照射位置への写像を正写像とした場合の、逆写像であることを特徴とする請求項1または2に記載の粒子線照射装置。
【請求項5】
前記数学モデルは、フィードフォワード型のニューラルネットワークであることを特徴とする請求項1乃至4のいずれか1項に記載の粒子線照射装置。
【請求項6】
前記フィードフォワード型のニューラルネットワークは、単層の隠れ層を有することを特徴とする請求項5記載の粒子線照射装置。
【請求項7】
荷電粒子ビームを発生させるビーム発生装置と、前記ビーム発生装置で発生された前記荷電粒子ビームを加速する加速器と、前記加速器により加速された荷電粒子ビームを輸送するビーム輸送装置と、前記ビーム輸送装置で輸送された荷電粒子ビームを走査電磁石で走査して照射対象に照射する粒子線照射装置とを備え、
前記粒子線照射装置は、請求項1乃至6のいずれか1項に記載の粒子線照射装置であることを特徴とする粒子線治療装置。
【請求項1】
加速器により加速された荷電粒子ビームを走査するヒステリシスのある走査電磁石と、前記走査電磁石を駆動する励磁電流を出力する走査電源と、
前記走査電源を制御する照射制御装置とを備えた粒子線照射装置であって、
前記照射制御装置は、
前記励磁電流の指令値を生成する数学モデルを有し、前記走査電源に出力された前記励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、前記評価の結果に基づいて前記数学モデルを更新し、前記ランスルーの経験を蓄積し、蓄積された前記ランスルーの経験に基づいて前記数学モデルが生成する前記励磁電流の指令値を前記走査電源に出力する走査電磁石指令値学習生成器を備えたことを特徴とする粒子線照射装置。
【請求項2】
前記走査電磁石指令値学習生成器は、
前記励磁電流の指令値を生成する前記数学モデルと、
前記走査電源に出力された前記励磁電流の指令値による一連の照射動作であるランスルーの結果を評価し、前記評価の結果に基づいて前記数学モデルを更新し、前記ランスルーの経験を蓄積する学習機能手段と、
前記学習機能手段により蓄積する最新の経験に基づいて前記数学モデルが生成する前記励磁電流の指令値を前記走査電源に出力する走査電磁石指令値系列生成器を備えたことを特徴とする請求項1記載の粒子線照射装置。
【請求項3】
前記数学モデルは、前記荷電粒子ビームが照射される照射対象における目標照射位置座標に基づいて前記励磁電流の指令値を生成することを特徴とする請求項1または2に記載の粒子線照射装置。
【請求項4】
記数学モデルは、前記走査電磁石のヒステリシス特性のダイナミックスを有する前記励磁電流の指令値から前記荷電粒子ビームの照射位置への写像を正写像とした場合の、逆写像であることを特徴とする請求項1または2に記載の粒子線照射装置。
【請求項5】
前記数学モデルは、フィードフォワード型のニューラルネットワークであることを特徴とする請求項1乃至4のいずれか1項に記載の粒子線照射装置。
【請求項6】
前記フィードフォワード型のニューラルネットワークは、単層の隠れ層を有することを特徴とする請求項5記載の粒子線照射装置。
【請求項7】
荷電粒子ビームを発生させるビーム発生装置と、前記ビーム発生装置で発生された前記荷電粒子ビームを加速する加速器と、前記加速器により加速された荷電粒子ビームを輸送するビーム輸送装置と、前記ビーム輸送装置で輸送された荷電粒子ビームを走査電磁石で走査して照射対象に照射する粒子線照射装置とを備え、
前記粒子線照射装置は、請求項1乃至6のいずれか1項に記載の粒子線照射装置であることを特徴とする粒子線治療装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−212418(P2011−212418A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2010−165884(P2010−165884)
【出願日】平成22年7月23日(2010.7.23)
【分割の表示】特願2010−520080(P2010−520080)の分割
【原出願日】平成22年3月31日(2010.3.31)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成22年7月23日(2010.7.23)
【分割の表示】特願2010−520080(P2010−520080)の分割
【原出願日】平成22年3月31日(2010.3.31)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]