
粒子計測方法及び粒子計測装置
【課題】空気中を浮遊して沈降する粒子径の大きい粒子の計測を正確に連続して、かつ定時的に、計測の精度にバラツキがなく計測することができる粒子計測装置と粒子計測方法を提供する。
【解決手段】空気中を浮遊して沈降する粒子を捕集面に捕集する捕集工程と、捕集面に捕集された前記粒子を撮像する撮像工程と、粒子の計測を行う計測工程とを備える。
【解決手段】空気中を浮遊して沈降する粒子を捕集面に捕集する捕集工程と、捕集面に捕集された前記粒子を撮像する撮像工程と、粒子の計測を行う計測工程とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒子計測方法及び粒子計測装置に関する。
【背景技術】
【0002】
従来、精密機器などの製造組立て工程では、その工程の空気中に浮遊する比較的大きな粒子が組立て中の精密機器を構成する部品などに付着し、品質に影響を与える。このため、空気中に浮遊する粒子の計測を行い、粒子が多い場合には、製造組立て工程の清掃を行っている。
【0003】
粒子の計測方法として、パーティクルカウンターによって空気中に浮遊する粒子の個数と粒子の粒径(長さ)などの計測を行うことが知られている。パーティクルカウンターは、計測を行う対象の空気を吸引し、その空気をパーティクルカウンター内部に設けられた光学部に試料空気として導入する。光学部は、試料空気にレーザー散乱光を投射することで、空気中に含まれる粒子がレーザー散乱光を反射し、光学部は、その反射したレーザー散乱光を受光することで計測を行っている。
【0004】
また、シリコンウエハーなどの表面を用いて、空気中を沈降(自然落下)する粒子を捕集し、捕集された粒子を顕微鏡で観察を行い、粒子の個数と、粒子の粒径との計測を行う方法が知られている。特許文献1では、液体や気体中の微粒子を不純物濾過用のフィルター上に捕集した汚染物として、その粒子径により数量分類して汚染度を等級表示する微粒子計測方式が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−20241号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、空気中を浮遊する粒子は、粒子径が大きく(概ね10μm以上)なると空気中での沈降速度が速くなる。このため、粒子径の大きい粒子は、試料空気として吸引されにくいと考えられる。また、試料空気の導入を行う配管(例えば、ビニルチューブなど)の内壁に付着することが多く、光学部まで到達しにくいと考えられる。このことから、空気中を浮遊する粒子径の大きい粒子をパーティクルカウンターで計測した場合、粒子の数が実際に浮遊する粒子より少なく計測されるという課題があった。
【0007】
次に、シリコンウエハーなどの表面に粒子を捕集し、顕微鏡で観察を行い計測する方法は、作業者の目視により行われる場合が多い。このため、作業者の習熟度により計測に要する時間が異なり、また、計測の精度にバラツキを生じるという課題もあった。さらに、作業者による計測のため、連続かつ定時的に計測を行うことが容易でないという課題もあった。特許文献1では、上述する課題については触れられていない。
【0008】
このため空気中を浮遊して沈降する粒子径の大きい粒子の計測を正確に連続して、かつ定時的に、計測の精度にバラツキがなく計測することができる粒子計測装置と粒子計測方法が要望されていた。
【課題を解決するための手段】
【0009】
本発明は、上述した課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0010】
(適用例1)本適用例に係る粒子計測方法は、空気中を浮遊して沈降する粒子を捕集面に捕集する捕集工程と、捕集面に捕集された粒子を撮像する撮像工程と、粒子の計測を行う計測工程とを備えることを特徴とする。
【0011】
このような粒子計測方法によれば、空気中を浮遊し沈降する粒径の大きな粒子を捕集面に捕集し、粒子を撮像することで、粒子径の大きい粒子を正確に計測することができる。
【0012】
(適用例2)上記適用例に係る粒子計測方法において、計測工程は、撮像工程で撮像された撮像データを粒子の画像データに変換し、当該画像データに基づいて粒子の数量計測および、長さ計測を含む計測を行う計測処理工程を備えることが好ましい。
【0013】
このような粒子計測方法によれば、捕集した粒子の撮像を行い画像データに変換し、計測をすることで、粒子の大きさの計測は、粒子が撮像されている画素の数と、当該画素の大きさとを乗じて粒子の大きさを計測することができる。また、粒子の個数の計測は、前記の粒子が撮像されている画素が連なる単位を1粒子として計測することができる。
【0014】
(適用例3)上記適用例に係る粒子計測方法において、計測工程は、粒子の基準となる基準画像データを有し、当該基準画像データと画像データとを比較する画像比較工程を備えていることが好ましい。
【0015】
このような粒子計測方法によれば、画像比較工程によって、基準画像データと撮像された画像データとの比較を粒子の表面の模様や透明度などを対象として比較を行うことで、基準画像データと同様の粒子を検出することができる。
【0016】
(適用例4)上記適用例に係る粒子計測方法において、撮像工程は、捕集面を基準として、粒子の沈降方向に対して逆方向から撮像をすることが好ましい。
【0017】
このような粒子計測方法によれば、粒子の沈降方向に対して逆方向から撮像をすることで、粒子の沈降を妨げることなく捕集した粒子を撮像することができる。
【0018】
(適用例5)上記適用例に係る粒子計測方法において、粒子の除去を行う除去工程を備えていることが好ましい。
【0019】
このような粒子計測方法によれば、除去工程を備えることで、重複して粒子が計測されることを抑制することができる。従って、連続して次の粒子の捕集と計測をすることができる。
【0020】
(適用例6)上記適用例に係る粒子計測方法において、除去工程は、粘性を有する弾性部材に粒子を付着させて除去を行うことが好ましい。
【0021】
このような粒子計測方法によれば、粘性を有する弾性部材に粒子を付着させて粒子の除去を行うことで、除去を行った粒子の飛散を抑制することができる。
【0022】
(適用例7)本適用例に係る粒子計測装置は、空気中を浮遊して沈降する粒子を捕集する捕集面を有する捕集部と、捕集部に捕集された粒子を撮像する撮像部と、粒子の計測を行う計測部と、を備えることを特徴とする。
【0023】
このような粒子計測装置によれば、空気中を浮遊し沈降する粒径の大きな粒子を捕集する捕集面を有して、捕集された粒子を撮像する撮像部を備えることで、粒子径の大きい粒子を正確に計測することができる。
【0024】
(適用例8)上記適用例に係る粒子計測装置において、計測処理部は、撮像部で撮像された撮像データを粒子の画像データに変換し、当該画像データに基づいて粒子の数量計測および長さ計測を含む計測を行う計測部を備えることが好ましい。
【0025】
このような粒子計測装置によれば、捕集した粒子の撮像を行い画像データに変換し計測を行う計測部を備えることで、計測精度のバラツキを抑制した計測結果を得ることができる粒子計測装置が実現できる。
【0026】
(適用例9)上記適用例に係る粒子計測装置において、計測部は、粒子の基準となる基準画像データを記憶する基準画像データ記憶部を有し、当該基準画像データと画像データとを比較する画像比較部を備えていることが好ましい。
【0027】
このような粒子計測装置によれば、基準画像データと変換された画像データとの比較を行う画像比較部を備え、例えば、粒子の表面の模様や透明度などの比較を行うことで、基準画像データと同じ粒子形状の粒子を検出することができる粒子計測装置が実現できる。
【0028】
(適用例10)上記適用例に係る粒子計測装置において、捕集部は、透明の板状部材を有して構成され、撮像部を粒子の沈降方向とは逆方向に配置し、撮像を行うことが好ましい。
【0029】
このような粒子計測装置によれば、捕集部は、透明の板状部材で構成され、粒子の沈降方向とは逆方向に撮像部を配置することで、粒子の沈降を妨げることなく粒子の撮像ができる。
【0030】
(適用例11)上記適用例に係る粒子計測装置において、捕集部は、撮像部と一体または別体に構成されていることが好ましい。
【0031】
このような粒子計測装置によれば、捕集部は、撮像部と一体または別体に構成されることで、粒子の捕集と計測を行う環境に応じて粒子の捕集方法を選択することができる。
【0032】
(適用例12)上記適用例に係る粒子計測装置において、粒子の除去を行う除去部を備えていることが好ましい。
【0033】
このような粒子計測装置によれば、除去部を備えることで、重複して粒子が計測されることを抑制することができる。従って、連続して次の粒子の捕集と計測をすることができる粒子計測装置が実現できる。
【0034】
(適用例13)上記適用例に係る粒子計測装置において、除去部は、粒子を付着する粘性を有する弾性部材を備えていることが好ましい。
【0035】
このような粒子計測装置によれば、除去部が粘性を有する弾性部材を備えることで、粒子を付着させて除去を行うことで、除去を行った粒子の飛散を抑制することができる。
【図面の簡単な説明】
【0036】
【図1】第一実施形態に係る、粒子計測装置の構成を模式的に示すブロック図。
【図2】第一実施形態に係る、粒子計測方法の各工程を示すフロー図。
【図3】図1の粒子計測装置に係る、粒子の捕集部と撮像部との配置を模式的に示す図。
【図4】第二実施形態に係る、粒子の捕集部と撮像部との配置を模式的に示す図。
【図5】第三実施形態に係る、粒子計測装置の構成を模式的に示すブロック図。
【図6】第三実施形態に係る、粒子計測方法の各工程を示すフロー図。
【図7】図5の粒子計測装置に係る、粒子の撮像部と除去部との配置を模式的に示す図。
【発明を実施するための形態】
【0037】
以下、実施形態を図面に基づいて粒子計測方法および粒子計測装置1について説明する。なお、以下に示す各図においては、各構成要素を図面上で認識され得る程度の大きさとするため、各構成要素の寸法や比率を実際の構成要素とは適宜に異ならせて記載をしている。
【0038】
(第一実施形態)
図1は、本実施形態に係る粒子計測装置1の構成を模式的に示すブロック図である。図2は、本実施形態に係る粒子計測方法の各工程を示すフロー図である。図3は、図1の粒子計測装置1に係る、粒子の捕集部10と撮像部20との配置を模式的に示す図である。
図1から図3を参照して、最初に粒子計測装置1の構成と粒子計測方法の流れの概要を説明する。
【0039】
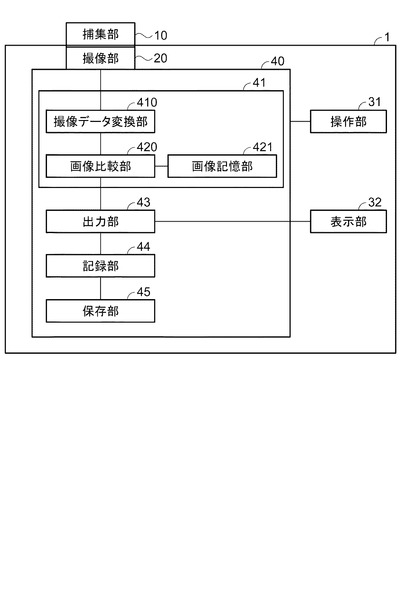
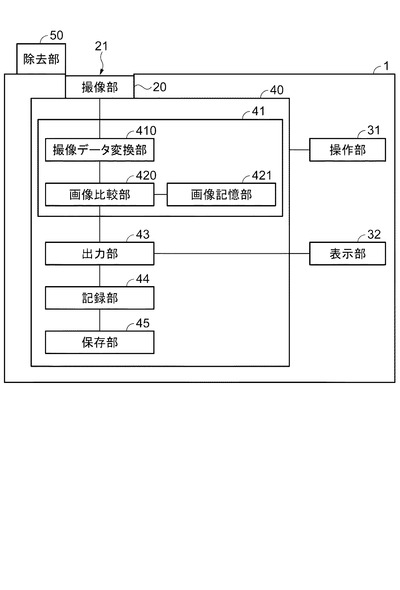
本実施形態の粒子計測装置1は、空気中に浮遊する粒子のうち、沈降する粒子を捕集して、その粒子の数や長さなどを計測する装置である。図1に示すように、本実施形態の粒子計測装置1は、沈降する粒子を捕集する捕集部10と、捕集部10で捕集した粒子を撮像する撮像部20と、撮像されたデータに基づいて粒子の数量や長さを計測する計測処理部40と、計測処理部40に指示を与え操作する操作部31と、計測した結果を表示する表示部32とを有して構成されている。計測処理部40は、粒子の数量と長さの計測と、基準画像との比較をする計測部41と、計測および比較した結果を表示部32に出力する出力部43と、計測結果を記録する記録部44と、計測結果を保存する保存部45とを備えている。また、計測部41は、撮像データを画像データに変換する撮像データ変換部410と、変換された画像データと基準画像データとを比較する画像比較部420と、比較の基準となる基準画像データを記憶する画像記憶部421とを備えている。
【0040】
なお、捕集部10は、撮像部20(粒子計測装置1本体)とは別体で構成されている。また、本実施形態では、撮像部20、計測処理部40、操作部31、表示部32は、外装筐体(図示省略)内部に収容されている。また、外装筐体内部には、各構成部を接続するケーブル(図示省略)や各構成部に電源供給を行う電源ユニット(図示省略)なども収容されている。
【0041】
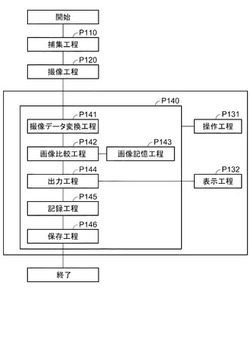
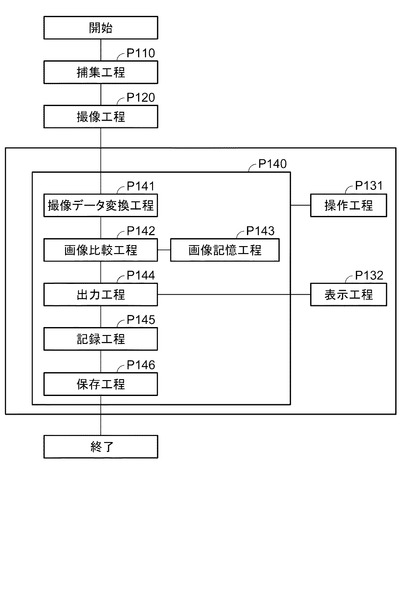
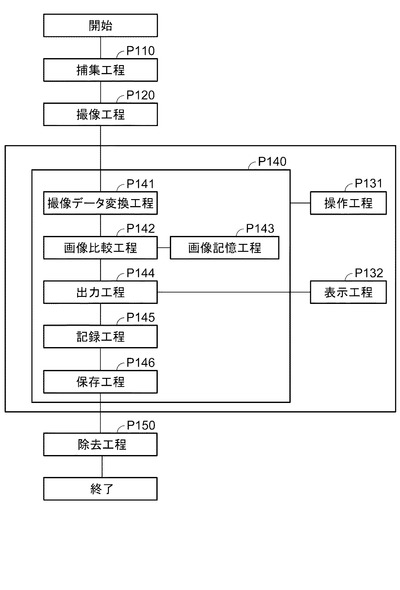
また、図2に示すように、粒子計測方法は、工程順に、沈降する粒子を捕集する捕集工程P110と、捕集工程P110で捕集した粒子を撮像する撮像工程P120と、撮像されたデータに基づいて粒子の数量や長さを計測する計測処理工程P140と、計測処理工程P140に指示を与え操作する操作工程P131と、計測した結果を表示する表示工程P132とを有して構成されている。また、計測処理工程P140は、撮像データを画像データに変換する撮像データ変換工程P141と、変換された画像データと基準画像データとを比較する画像比較工程P142と、比較の基準となる基準画像データを記憶する画像記憶工程P143と、比較した結果を表示工程P132に出力する出力工程P144と、計測結果を記録する記録工程P145と、計測結果を保存する保存工程P146を備えている。
【0042】
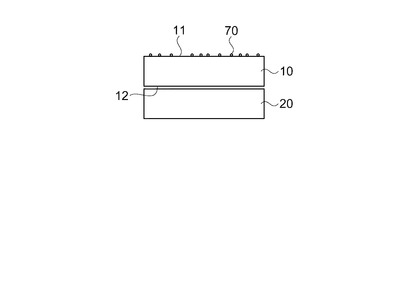
図3に示すように、本実施形態の捕集部10は、透明な板状部材で構成されている。詳細には、捕集部10は透明なガラス板を用いている。また、捕集部10は、捕集面11を備え、沈降する粒子70をこの捕集面11に捕集する。なお、捕集部10は、アクリル樹脂板など透明な板状部材でもよい。
【0043】
撮像部20と捕集部10の配置関係について説明する。図3に示すように撮像部20は、捕集部10の下部、言い換えれば、捕集面11に捕集される粒子の沈降する方向(重力方向)とは逆の方向となる裏面12に相対して設置される。従って、撮像部20は、捕集部10の透明なガラス板を介して粒子70を撮像する。なお、撮像部20は、撮像部20を構成する受光面(図示省略)を粒子の沈降する方向と逆方向に向けて外装筐体の上面に設置されている。
【0044】
ここで、本実施形態の粒子計測装置1の計測対象である空気中を浮遊する粒子について説明をする。
【0045】
空気中を浮遊する粒子の大きさによって、粒子の沈降速度が異なる。物が落下することは重力による作用であることが一般に知られ、浮遊する粒子においても同様に重力の作用が働く。粒子の沈降速度は、空気抵抗を考慮しない場合、時間の経過と共に粒子の沈降速度は増加することになる。しかし、空気抵抗が沈降する粒子に作用し、ある沈降速度で粒子に作用する重力と、空気抵抗とが平衡し、平衡後は、床などに着床するまで一定の沈降速度となる。このことは、ストークスの式によって粒子沈降の終末速度を求められることが知られている。例えば、同じ組成の粒子で粒子径(大きさ)のみ異なる場合、沈降速度のストークスの式による計算値は、1μmの粒子では、粒子の沈降速度は35μm毎秒となり、10μmでは、3045μm毎秒となる。このことから、粒子径の大きい粒子の沈降速度が速いことがわかる。
【0046】
そこで、これら沈降速度の速い粒子を捕集し、計測を行う粒子計測装置1が求められる。よって、本実施形態の粒子計測装置1は、前述の沈降速度の速い概ね10μm以上の粒子を対象に捕集面に捕集し、粒子の計測をする粒子計測装置である。
【0047】
次に、図1、図2を参照して、粒子計測装置1の動作に関し、粒子計測方法と併せて説明する。計測を開始する前作業として、捕集面11の清掃を行う。清掃はクロスなどによって、捕集面11に付着している粒子を除去する。次に、粒子を計測する場所に捕集部10を設置する。この作業は、作業者により行われる。この作業の実行が捕集工程P110となる。
【0048】
設置された捕集部10(捕集面11)には、設置した上部の空間を浮遊する粒子のうち、概ね10μm以上の比較的大きな粒子が沈降して捕集される。捕集が終了した場合、作業者は、捕集部10を回収して撮像部20に載置する。この動作以降は、作業者などが操作部31から操作指示を行い粒子計測装置1本体内の計測処理部40で動作する。なお、操作部31の操作指示により、撮像部20が動作して捕集した粒子の撮像を行う。これは撮像工程P120に対応している。
【0049】
撮像部20は、光を電気信号に変化する受光素子で構成され、本実施例では、電荷結合素子(Charge−Coupled−Device)を用いている。図示は省略するが、電荷結合素子の受光面には、受光面から配置が近い順番に、カラーフィルターと、マイクロレンズアレイと、光学フィルターとを有し構成されている。なお、粒子計測装置1で計測ができる粒子の大きさは、当該受光素子の大きさによって決まる。例えば、解像度6400dpiの受光素子であれば、素子の大きさは3.97μmであり、この大きさが理論上の計測ができる最小の粒子である。
【0050】
次に計測処理部40での動作に関して説明する。計測処理部40は、パーソナルコンピューター(以降、PCと称する。)構成されている。そして撮像データ変換部410は、計測処理部40を構成するPCの入出力インターフェイスと、演算処理装置および、一時記憶装置として構成されている。撮像データ変換部410は、撮像部20で撮像された撮像データを画像比較部420で計測と画像比較ができる画像データに変換する。また、この動作は、撮像データ変換工程P141に対応する。
【0051】
また、計測処理部40を構成するPCは、計測処理部40の各工程を実行するソフトウエアプログラムによって動作している。画像比較部420と、画像記憶部421とは、専用の画像処理アプリケーションソフトウエアのプログラムによって実行される。当該画像処理アプリケーションソフトウエアは、撮像部20で受光素子(電荷結合素子)が受光した光の強さに応じて256段階(8ビット)で出力される信号の処理を行う。当該画像処理アプリケーションソフトウエアは、受光素子から出力される信号を画像データに変換し、変換された画像データを基に、画像データの画素に粒子が撮像されているかの判断を行う。画素に粒子が撮像されているかの判断は、画素単位で行う。本実施例では、4画素単位で判断を行い受光素子の間に撮像された粒子の有無の判別も行う。さらに、比較の基準となる画像と撮像された画像とを画素単位で比較し、粒子の種類や大きさの特定を行う画像処理アプリケーションソフトウエアで構成されている。
【0052】
次に操作部31での動作に関して説明をする。操作部31は、キーボードとマウスで構成されている。操作部31は、計測処理部40に命令を与え粒子計測装置1を操作し粒子計測を実行する。また、この動作は、操作工程P131に対応する。
【0053】
次に画像比較部420と画像記憶部421での動作に関して説明する。画像比較部420と画像記憶部421は、計測処理部40を構成するPCの演算処理装置および一時記憶装置と、ソフトウエアで構成されている。画像比較部420は、撮像データ変換部410で変換された画像データに基づいて、撮像部20で撮像された粒子の大きさ(長さ)と粒子の個数とを計測する。粒子の大きさの計測は、粒子が撮像されている画素の数と当該画素の大きさを乗じて粒子の大きさを計測する。粒子の個数の計測は、前述の粒子が撮像されている画素が連なる単位を1粒子として計測する。また、画像記憶部421は、変換された画像データと比較する基準となる基準画像データを記憶している。画像比較部420は、変換された画像データと比較の基準とる基準画像データと比較し、同様の粒子の表面の模様や透明度などを検出する。また、この動作は、画像比較工程P142と画像記憶工程P143とに対応する。
【0054】
次に出力部43での動作に関して説明する。出力部43は、計測処理部40を構成するPCの入出力インターフェイスと、演算処理装置および一時記憶装置と、ソフトウエアで構成されている。出力部43は、画像比較部420で計測と比較を行った結果を表示部32と記録部44とに出力する。また、この動作は、出力工程P144に対応する。
【0055】
次に表示部32での動作に関して説明する。表示部32は、液晶表示装置とランプで構成されている。表示部32は、計測処理部40の動作状態と、計測結果などを表示する。また、この動作は、表示工程P132に対応する。
【0056】
次に記録部44での動作に関して説明する。記録部44は、計測処理部40を構成するPCの入出力インターフェイスと、ソフトウエアと、印字装置(図示省略)で構成されている。記録部44は、出力部43から出力された計測結果を印字装置によって印字記録する。併せて、計測結果を記録し保存部45に送信する。また、この動作は、記録工程P145に対応する。
【0057】
次に保存部45での動作に関して説明する。保存部45は、計測処理部40を構成するPCのハードディスク装置として構成されている。保存部45は、記録部44から送信された計測結果をハードディスク装置に保存する。また、この動作は、保存工程P146に対応する。保存工程P146が完了した場合一連の計測工程が終了する。
【0058】
上述した第一実施形態によれば、以下の効果が得られる。
【0059】
本実施形態に係る粒子計測装置1および粒子計測方法によれば、空気中を浮遊して沈降する粒子を捕集面11に捕集し、その捕集した粒子70を撮像することで、空気中に浮遊する粒子のうち、粒子径の大きな沈降する粒子を捕集し、その捕集した粒子70の数量や長さなどを計測することができる。
【0060】
本実施形態に係る粒子計測装置1および粒子計測方法によれば、粒子の撮像を行い画像データに変換し計測をすることで、粒子の大きさの計測は、粒子が撮像されている画素の数と当該画素の大きさを乗じて粒子の大きさを計測することができる。また、粒子の個数の計測は、前述の粒子が撮像されている画素が連なる単位を1粒子として計測することができる。従って、作業者によって顕微鏡を用いて行う計測に比べて計測精度のバラツキを抑制することができる。また、作業者の習熟度に影響されない粒子計測方法および粒子計測装置1が実現できる。
【0061】
本実施形態に係る粒子計測装置1および粒子計測方法によれば、画像比較工程P142によって、粒子の表面の模様や透明度などを比較の対象として基準画像データと撮像された画像データとの比較を行うことで、基準画像データと同様の粒子を検出することができる。従って、計測された粒子の種類を容易に特定することができる。
【0062】
本実施形態に係る粒子計測装置1および、粒子計測方法によれば、粒子計測装置1と捕集部10が別体で構成されることで、複数の計測場所における粒子の捕集と計測をおこなうことができる。また、捕集部10の部材を選択することで様々な計測を行う環境に対応することがでる。例えば、耐熱性を有するガラス板で捕集部10を構成した場合、加熱炉内に浮遊する粒子の捕集を行い、粒子の捕集後に粒子計測装置1で粒子の計測を行うことによって、粒子計測装置1の設置が難しい環境に浮遊して沈降する粒子の計測ができる。
【0063】
本実施形態に係る粒子計測装置1および、粒子計測方法によれば、粒子の沈降方向に対して逆方向から撮像をすることで、粒子の沈降を妨げることなく捕集した粒子を撮像することができる。撮像部20は、捕集部10の下部に設置されて撮像するため、濾紙など不透明な部材で形成された捕集部を用いて、捕集された粒子を撮像する場合のように、捕集面11を撮像部20の受光面の方向に向けることなく撮像ができる。
【0064】
(第二実施形態)
図4は、第二実施形態に係る、粒子の捕集部と撮像部との配置を模式的に示す図である。図4を参照して、本実施形態の粒子計測装置1の構成と粒子計測方法の流れを説明する。
【0065】
本実施形態は、撮像部20と、捕集部10とが一体として構成されている点で、前述の第一実施形態で説明した粒子計測装置1と異なっている。その他、第一実施形態と同様であるため、同様の構成および工程は同様の符号を付して説明は省略または簡略とする。
【0066】
本実施形態の粒子計測装置1は、沈降する粒子を撮像部20の後述する受光面に捕集し、捕集した粒子の計測を行う粒子計測装置1である。本実施形態の粒子計測装置1は、沈降する粒子を捕集し、捕集した粒子を撮像する撮像部20を備えている。
【0067】
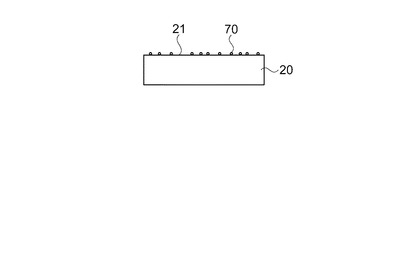
図4に示すように、本実施形態の撮像部20は、撮像部20を構成する受光面(図示省略)を捕集面21とし、粒子の沈降する方向に対して逆方向に向けて外装筐体の上面に設置されている。従って、粒子計測する場所に粒子計測装置1を設置して、粒子の捕集と計測を行う。なお、設置された撮像部20(捕集面21)には、設置した上部の空間を浮遊する粒子のうち、第一実施形態同様に、概ね10μm以上の比較的大きな粒子が沈降して捕集し撮像される。この動作が捕集工程P110となる。
【0068】
上述した第二実施形態によれば、以下の効果が得られる。
【0069】
本実施形態の粒子計測装置1および粒子計測方法によれば、捕集部10は、撮像部20と一体として構成し、粒子の捕集と計測を行う。従って、作業者が捕集部10を撮像部20に載置しないため、計測の簡易化を図ることができる。また、プログラムの実行により例えば、操作部31で設定した時刻に粒子の計測を開始または、終了することができる。また、操作部31で設定した時間間隔で連続して捕集した粒子の計測を行うことができる。
【0070】
(第三実施形態)
図5は、第三実施形態に係る、粒子計測装置1の構成を模式的に示すブロック図である。図6は、粒子計測方法の各工程を示すフロー図である。図7は、図5の粒子計測装置1に係る、粒子の撮像部と除去部との配置を模式的に示す図である。
【0071】
図5から図7を参照して、本実施形態の粒子計測装置1の構成と、粒子計測方法の流れを説明する。本実施形態では、捕集面に捕集されている粒子の除去を行う除去工程と、除去工程を実行する除去部50を備えている。この点で、前述の第二実施形態で説明した粒子計測装置1および粒子計測方法と異なっている。その他、粒子計測装置1の構成および、粒子計測工程は、前述の第二実施形態と同様であるため、同様の部分は構成および工程には同様の符号を付して説明は省略または簡略とする。
【0072】
図5に示すように、本実施形態の粒子計測装置1は、第二実施形態での粒子計測装置1の構成に加えて、捕集面21に捕集した粒子70を除去する除去部50を有して構成されている。
【0073】
また、図6に示すように、本実施形態の粒子計測方法は、計測処理工程P140が完了した後に、捕集面21に捕集されている粒子70の除去を行う除去工程P150を備えている。また、計測開始する前作業として、捕集面21に付着している粒子の除去を、除去部50を作動させ行う。この作業は、操作部31からの作業者の操作指示によって行われる。
【0074】
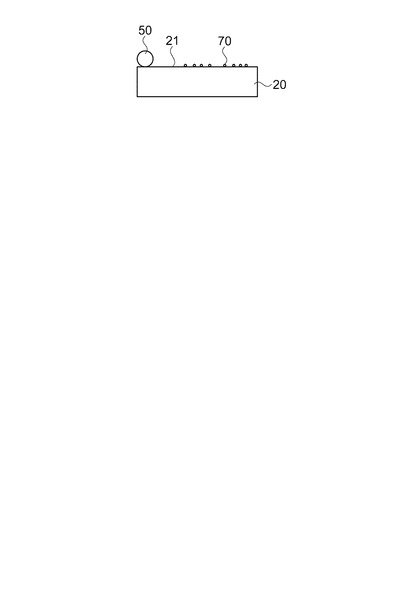
撮像部20と除去部50の配置関係について説明する。図7に示すように、除去部50は、撮像部20の捕集面21に密接して配置される。なお、撮像部20の配置は、第二実施形態と同様に、外装筐体の上面に設置されている。
【0075】
次に除去部50での構成等に関して説明をする。除去部50は、粘性を有する弾性部材で形成されたローラーで構成され、図示は省略するが、ローラーを駆動させる駆動部を備える。詳細には、ブチル系合成ゴムで形成されたローラーを用いる。除去部50は、ローラーを捕集面21に密着させて回転することで、捕集面21に捕集されている粒子70をローラーに付着させて粒子を除去する。なお、除去部50は、粘性を有し粘性が捕集面21に転写しないゴム部材がよく、例えば、ウレタンゴムも用いることもできる。
【0076】
上述した第三実施形態によれば、以下の効果が得られる。
【0077】
本実施形態の粒子計測装置1によれば、除去部50が粘性を有する弾性部材を備えることで、粒子を付着させて除去を行うことで、一度計測した粒子が重複して計測されることを抑制し、また、除去を行った粒子の飛散を抑制することができる。従って、例えば、作業者が介在しなくても、一定時間の間に、沈降する粒子の計測を連続しておこなうことができる。さらに、除去された粒子は除去部50のローラーに保持されているため計測後に除去された粒子を試料として収集することができる。
【符号の説明】
【0078】
1…粒子計測装置、10…捕集部、11…捕集面、12…裏面、20…撮像部、21…捕集面、31…操作部、32…表示部、40…計測処理部、41…計測部、43…出力部、44…記録部、45…保存部、50…除去部、70…粒子、410…撮像データ変換部、420…画像比較部、421…画像記憶部、P110…捕集工程、P120…撮像工程、P131…操作工程、P132…表示工程、P140…計測処理工程、P141…撮像データ変換工程、P142…画像比較工程、P143…画像記憶工程、P144…出力工程、P145…記録工程、P146…保存工程、P150…除去工程。
【技術分野】
【0001】
本発明は、粒子計測方法及び粒子計測装置に関する。
【背景技術】
【0002】
従来、精密機器などの製造組立て工程では、その工程の空気中に浮遊する比較的大きな粒子が組立て中の精密機器を構成する部品などに付着し、品質に影響を与える。このため、空気中に浮遊する粒子の計測を行い、粒子が多い場合には、製造組立て工程の清掃を行っている。
【0003】
粒子の計測方法として、パーティクルカウンターによって空気中に浮遊する粒子の個数と粒子の粒径(長さ)などの計測を行うことが知られている。パーティクルカウンターは、計測を行う対象の空気を吸引し、その空気をパーティクルカウンター内部に設けられた光学部に試料空気として導入する。光学部は、試料空気にレーザー散乱光を投射することで、空気中に含まれる粒子がレーザー散乱光を反射し、光学部は、その反射したレーザー散乱光を受光することで計測を行っている。
【0004】
また、シリコンウエハーなどの表面を用いて、空気中を沈降(自然落下)する粒子を捕集し、捕集された粒子を顕微鏡で観察を行い、粒子の個数と、粒子の粒径との計測を行う方法が知られている。特許文献1では、液体や気体中の微粒子を不純物濾過用のフィルター上に捕集した汚染物として、その粒子径により数量分類して汚染度を等級表示する微粒子計測方式が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−20241号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、空気中を浮遊する粒子は、粒子径が大きく(概ね10μm以上)なると空気中での沈降速度が速くなる。このため、粒子径の大きい粒子は、試料空気として吸引されにくいと考えられる。また、試料空気の導入を行う配管(例えば、ビニルチューブなど)の内壁に付着することが多く、光学部まで到達しにくいと考えられる。このことから、空気中を浮遊する粒子径の大きい粒子をパーティクルカウンターで計測した場合、粒子の数が実際に浮遊する粒子より少なく計測されるという課題があった。
【0007】
次に、シリコンウエハーなどの表面に粒子を捕集し、顕微鏡で観察を行い計測する方法は、作業者の目視により行われる場合が多い。このため、作業者の習熟度により計測に要する時間が異なり、また、計測の精度にバラツキを生じるという課題もあった。さらに、作業者による計測のため、連続かつ定時的に計測を行うことが容易でないという課題もあった。特許文献1では、上述する課題については触れられていない。
【0008】
このため空気中を浮遊して沈降する粒子径の大きい粒子の計測を正確に連続して、かつ定時的に、計測の精度にバラツキがなく計測することができる粒子計測装置と粒子計測方法が要望されていた。
【課題を解決するための手段】
【0009】
本発明は、上述した課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
【0010】
(適用例1)本適用例に係る粒子計測方法は、空気中を浮遊して沈降する粒子を捕集面に捕集する捕集工程と、捕集面に捕集された粒子を撮像する撮像工程と、粒子の計測を行う計測工程とを備えることを特徴とする。
【0011】
このような粒子計測方法によれば、空気中を浮遊し沈降する粒径の大きな粒子を捕集面に捕集し、粒子を撮像することで、粒子径の大きい粒子を正確に計測することができる。
【0012】
(適用例2)上記適用例に係る粒子計測方法において、計測工程は、撮像工程で撮像された撮像データを粒子の画像データに変換し、当該画像データに基づいて粒子の数量計測および、長さ計測を含む計測を行う計測処理工程を備えることが好ましい。
【0013】
このような粒子計測方法によれば、捕集した粒子の撮像を行い画像データに変換し、計測をすることで、粒子の大きさの計測は、粒子が撮像されている画素の数と、当該画素の大きさとを乗じて粒子の大きさを計測することができる。また、粒子の個数の計測は、前記の粒子が撮像されている画素が連なる単位を1粒子として計測することができる。
【0014】
(適用例3)上記適用例に係る粒子計測方法において、計測工程は、粒子の基準となる基準画像データを有し、当該基準画像データと画像データとを比較する画像比較工程を備えていることが好ましい。
【0015】
このような粒子計測方法によれば、画像比較工程によって、基準画像データと撮像された画像データとの比較を粒子の表面の模様や透明度などを対象として比較を行うことで、基準画像データと同様の粒子を検出することができる。
【0016】
(適用例4)上記適用例に係る粒子計測方法において、撮像工程は、捕集面を基準として、粒子の沈降方向に対して逆方向から撮像をすることが好ましい。
【0017】
このような粒子計測方法によれば、粒子の沈降方向に対して逆方向から撮像をすることで、粒子の沈降を妨げることなく捕集した粒子を撮像することができる。
【0018】
(適用例5)上記適用例に係る粒子計測方法において、粒子の除去を行う除去工程を備えていることが好ましい。
【0019】
このような粒子計測方法によれば、除去工程を備えることで、重複して粒子が計測されることを抑制することができる。従って、連続して次の粒子の捕集と計測をすることができる。
【0020】
(適用例6)上記適用例に係る粒子計測方法において、除去工程は、粘性を有する弾性部材に粒子を付着させて除去を行うことが好ましい。
【0021】
このような粒子計測方法によれば、粘性を有する弾性部材に粒子を付着させて粒子の除去を行うことで、除去を行った粒子の飛散を抑制することができる。
【0022】
(適用例7)本適用例に係る粒子計測装置は、空気中を浮遊して沈降する粒子を捕集する捕集面を有する捕集部と、捕集部に捕集された粒子を撮像する撮像部と、粒子の計測を行う計測部と、を備えることを特徴とする。
【0023】
このような粒子計測装置によれば、空気中を浮遊し沈降する粒径の大きな粒子を捕集する捕集面を有して、捕集された粒子を撮像する撮像部を備えることで、粒子径の大きい粒子を正確に計測することができる。
【0024】
(適用例8)上記適用例に係る粒子計測装置において、計測処理部は、撮像部で撮像された撮像データを粒子の画像データに変換し、当該画像データに基づいて粒子の数量計測および長さ計測を含む計測を行う計測部を備えることが好ましい。
【0025】
このような粒子計測装置によれば、捕集した粒子の撮像を行い画像データに変換し計測を行う計測部を備えることで、計測精度のバラツキを抑制した計測結果を得ることができる粒子計測装置が実現できる。
【0026】
(適用例9)上記適用例に係る粒子計測装置において、計測部は、粒子の基準となる基準画像データを記憶する基準画像データ記憶部を有し、当該基準画像データと画像データとを比較する画像比較部を備えていることが好ましい。
【0027】
このような粒子計測装置によれば、基準画像データと変換された画像データとの比較を行う画像比較部を備え、例えば、粒子の表面の模様や透明度などの比較を行うことで、基準画像データと同じ粒子形状の粒子を検出することができる粒子計測装置が実現できる。
【0028】
(適用例10)上記適用例に係る粒子計測装置において、捕集部は、透明の板状部材を有して構成され、撮像部を粒子の沈降方向とは逆方向に配置し、撮像を行うことが好ましい。
【0029】
このような粒子計測装置によれば、捕集部は、透明の板状部材で構成され、粒子の沈降方向とは逆方向に撮像部を配置することで、粒子の沈降を妨げることなく粒子の撮像ができる。
【0030】
(適用例11)上記適用例に係る粒子計測装置において、捕集部は、撮像部と一体または別体に構成されていることが好ましい。
【0031】
このような粒子計測装置によれば、捕集部は、撮像部と一体または別体に構成されることで、粒子の捕集と計測を行う環境に応じて粒子の捕集方法を選択することができる。
【0032】
(適用例12)上記適用例に係る粒子計測装置において、粒子の除去を行う除去部を備えていることが好ましい。
【0033】
このような粒子計測装置によれば、除去部を備えることで、重複して粒子が計測されることを抑制することができる。従って、連続して次の粒子の捕集と計測をすることができる粒子計測装置が実現できる。
【0034】
(適用例13)上記適用例に係る粒子計測装置において、除去部は、粒子を付着する粘性を有する弾性部材を備えていることが好ましい。
【0035】
このような粒子計測装置によれば、除去部が粘性を有する弾性部材を備えることで、粒子を付着させて除去を行うことで、除去を行った粒子の飛散を抑制することができる。
【図面の簡単な説明】
【0036】
【図1】第一実施形態に係る、粒子計測装置の構成を模式的に示すブロック図。
【図2】第一実施形態に係る、粒子計測方法の各工程を示すフロー図。
【図3】図1の粒子計測装置に係る、粒子の捕集部と撮像部との配置を模式的に示す図。
【図4】第二実施形態に係る、粒子の捕集部と撮像部との配置を模式的に示す図。
【図5】第三実施形態に係る、粒子計測装置の構成を模式的に示すブロック図。
【図6】第三実施形態に係る、粒子計測方法の各工程を示すフロー図。
【図7】図5の粒子計測装置に係る、粒子の撮像部と除去部との配置を模式的に示す図。
【発明を実施するための形態】
【0037】
以下、実施形態を図面に基づいて粒子計測方法および粒子計測装置1について説明する。なお、以下に示す各図においては、各構成要素を図面上で認識され得る程度の大きさとするため、各構成要素の寸法や比率を実際の構成要素とは適宜に異ならせて記載をしている。
【0038】
(第一実施形態)
図1は、本実施形態に係る粒子計測装置1の構成を模式的に示すブロック図である。図2は、本実施形態に係る粒子計測方法の各工程を示すフロー図である。図3は、図1の粒子計測装置1に係る、粒子の捕集部10と撮像部20との配置を模式的に示す図である。
図1から図3を参照して、最初に粒子計測装置1の構成と粒子計測方法の流れの概要を説明する。
【0039】
本実施形態の粒子計測装置1は、空気中に浮遊する粒子のうち、沈降する粒子を捕集して、その粒子の数や長さなどを計測する装置である。図1に示すように、本実施形態の粒子計測装置1は、沈降する粒子を捕集する捕集部10と、捕集部10で捕集した粒子を撮像する撮像部20と、撮像されたデータに基づいて粒子の数量や長さを計測する計測処理部40と、計測処理部40に指示を与え操作する操作部31と、計測した結果を表示する表示部32とを有して構成されている。計測処理部40は、粒子の数量と長さの計測と、基準画像との比較をする計測部41と、計測および比較した結果を表示部32に出力する出力部43と、計測結果を記録する記録部44と、計測結果を保存する保存部45とを備えている。また、計測部41は、撮像データを画像データに変換する撮像データ変換部410と、変換された画像データと基準画像データとを比較する画像比較部420と、比較の基準となる基準画像データを記憶する画像記憶部421とを備えている。
【0040】
なお、捕集部10は、撮像部20(粒子計測装置1本体)とは別体で構成されている。また、本実施形態では、撮像部20、計測処理部40、操作部31、表示部32は、外装筐体(図示省略)内部に収容されている。また、外装筐体内部には、各構成部を接続するケーブル(図示省略)や各構成部に電源供給を行う電源ユニット(図示省略)なども収容されている。
【0041】
また、図2に示すように、粒子計測方法は、工程順に、沈降する粒子を捕集する捕集工程P110と、捕集工程P110で捕集した粒子を撮像する撮像工程P120と、撮像されたデータに基づいて粒子の数量や長さを計測する計測処理工程P140と、計測処理工程P140に指示を与え操作する操作工程P131と、計測した結果を表示する表示工程P132とを有して構成されている。また、計測処理工程P140は、撮像データを画像データに変換する撮像データ変換工程P141と、変換された画像データと基準画像データとを比較する画像比較工程P142と、比較の基準となる基準画像データを記憶する画像記憶工程P143と、比較した結果を表示工程P132に出力する出力工程P144と、計測結果を記録する記録工程P145と、計測結果を保存する保存工程P146を備えている。
【0042】
図3に示すように、本実施形態の捕集部10は、透明な板状部材で構成されている。詳細には、捕集部10は透明なガラス板を用いている。また、捕集部10は、捕集面11を備え、沈降する粒子70をこの捕集面11に捕集する。なお、捕集部10は、アクリル樹脂板など透明な板状部材でもよい。
【0043】
撮像部20と捕集部10の配置関係について説明する。図3に示すように撮像部20は、捕集部10の下部、言い換えれば、捕集面11に捕集される粒子の沈降する方向(重力方向)とは逆の方向となる裏面12に相対して設置される。従って、撮像部20は、捕集部10の透明なガラス板を介して粒子70を撮像する。なお、撮像部20は、撮像部20を構成する受光面(図示省略)を粒子の沈降する方向と逆方向に向けて外装筐体の上面に設置されている。
【0044】
ここで、本実施形態の粒子計測装置1の計測対象である空気中を浮遊する粒子について説明をする。
【0045】
空気中を浮遊する粒子の大きさによって、粒子の沈降速度が異なる。物が落下することは重力による作用であることが一般に知られ、浮遊する粒子においても同様に重力の作用が働く。粒子の沈降速度は、空気抵抗を考慮しない場合、時間の経過と共に粒子の沈降速度は増加することになる。しかし、空気抵抗が沈降する粒子に作用し、ある沈降速度で粒子に作用する重力と、空気抵抗とが平衡し、平衡後は、床などに着床するまで一定の沈降速度となる。このことは、ストークスの式によって粒子沈降の終末速度を求められることが知られている。例えば、同じ組成の粒子で粒子径(大きさ)のみ異なる場合、沈降速度のストークスの式による計算値は、1μmの粒子では、粒子の沈降速度は35μm毎秒となり、10μmでは、3045μm毎秒となる。このことから、粒子径の大きい粒子の沈降速度が速いことがわかる。
【0046】
そこで、これら沈降速度の速い粒子を捕集し、計測を行う粒子計測装置1が求められる。よって、本実施形態の粒子計測装置1は、前述の沈降速度の速い概ね10μm以上の粒子を対象に捕集面に捕集し、粒子の計測をする粒子計測装置である。
【0047】
次に、図1、図2を参照して、粒子計測装置1の動作に関し、粒子計測方法と併せて説明する。計測を開始する前作業として、捕集面11の清掃を行う。清掃はクロスなどによって、捕集面11に付着している粒子を除去する。次に、粒子を計測する場所に捕集部10を設置する。この作業は、作業者により行われる。この作業の実行が捕集工程P110となる。
【0048】
設置された捕集部10(捕集面11)には、設置した上部の空間を浮遊する粒子のうち、概ね10μm以上の比較的大きな粒子が沈降して捕集される。捕集が終了した場合、作業者は、捕集部10を回収して撮像部20に載置する。この動作以降は、作業者などが操作部31から操作指示を行い粒子計測装置1本体内の計測処理部40で動作する。なお、操作部31の操作指示により、撮像部20が動作して捕集した粒子の撮像を行う。これは撮像工程P120に対応している。
【0049】
撮像部20は、光を電気信号に変化する受光素子で構成され、本実施例では、電荷結合素子(Charge−Coupled−Device)を用いている。図示は省略するが、電荷結合素子の受光面には、受光面から配置が近い順番に、カラーフィルターと、マイクロレンズアレイと、光学フィルターとを有し構成されている。なお、粒子計測装置1で計測ができる粒子の大きさは、当該受光素子の大きさによって決まる。例えば、解像度6400dpiの受光素子であれば、素子の大きさは3.97μmであり、この大きさが理論上の計測ができる最小の粒子である。
【0050】
次に計測処理部40での動作に関して説明する。計測処理部40は、パーソナルコンピューター(以降、PCと称する。)構成されている。そして撮像データ変換部410は、計測処理部40を構成するPCの入出力インターフェイスと、演算処理装置および、一時記憶装置として構成されている。撮像データ変換部410は、撮像部20で撮像された撮像データを画像比較部420で計測と画像比較ができる画像データに変換する。また、この動作は、撮像データ変換工程P141に対応する。
【0051】
また、計測処理部40を構成するPCは、計測処理部40の各工程を実行するソフトウエアプログラムによって動作している。画像比較部420と、画像記憶部421とは、専用の画像処理アプリケーションソフトウエアのプログラムによって実行される。当該画像処理アプリケーションソフトウエアは、撮像部20で受光素子(電荷結合素子)が受光した光の強さに応じて256段階(8ビット)で出力される信号の処理を行う。当該画像処理アプリケーションソフトウエアは、受光素子から出力される信号を画像データに変換し、変換された画像データを基に、画像データの画素に粒子が撮像されているかの判断を行う。画素に粒子が撮像されているかの判断は、画素単位で行う。本実施例では、4画素単位で判断を行い受光素子の間に撮像された粒子の有無の判別も行う。さらに、比較の基準となる画像と撮像された画像とを画素単位で比較し、粒子の種類や大きさの特定を行う画像処理アプリケーションソフトウエアで構成されている。
【0052】
次に操作部31での動作に関して説明をする。操作部31は、キーボードとマウスで構成されている。操作部31は、計測処理部40に命令を与え粒子計測装置1を操作し粒子計測を実行する。また、この動作は、操作工程P131に対応する。
【0053】
次に画像比較部420と画像記憶部421での動作に関して説明する。画像比較部420と画像記憶部421は、計測処理部40を構成するPCの演算処理装置および一時記憶装置と、ソフトウエアで構成されている。画像比較部420は、撮像データ変換部410で変換された画像データに基づいて、撮像部20で撮像された粒子の大きさ(長さ)と粒子の個数とを計測する。粒子の大きさの計測は、粒子が撮像されている画素の数と当該画素の大きさを乗じて粒子の大きさを計測する。粒子の個数の計測は、前述の粒子が撮像されている画素が連なる単位を1粒子として計測する。また、画像記憶部421は、変換された画像データと比較する基準となる基準画像データを記憶している。画像比較部420は、変換された画像データと比較の基準とる基準画像データと比較し、同様の粒子の表面の模様や透明度などを検出する。また、この動作は、画像比較工程P142と画像記憶工程P143とに対応する。
【0054】
次に出力部43での動作に関して説明する。出力部43は、計測処理部40を構成するPCの入出力インターフェイスと、演算処理装置および一時記憶装置と、ソフトウエアで構成されている。出力部43は、画像比較部420で計測と比較を行った結果を表示部32と記録部44とに出力する。また、この動作は、出力工程P144に対応する。
【0055】
次に表示部32での動作に関して説明する。表示部32は、液晶表示装置とランプで構成されている。表示部32は、計測処理部40の動作状態と、計測結果などを表示する。また、この動作は、表示工程P132に対応する。
【0056】
次に記録部44での動作に関して説明する。記録部44は、計測処理部40を構成するPCの入出力インターフェイスと、ソフトウエアと、印字装置(図示省略)で構成されている。記録部44は、出力部43から出力された計測結果を印字装置によって印字記録する。併せて、計測結果を記録し保存部45に送信する。また、この動作は、記録工程P145に対応する。
【0057】
次に保存部45での動作に関して説明する。保存部45は、計測処理部40を構成するPCのハードディスク装置として構成されている。保存部45は、記録部44から送信された計測結果をハードディスク装置に保存する。また、この動作は、保存工程P146に対応する。保存工程P146が完了した場合一連の計測工程が終了する。
【0058】
上述した第一実施形態によれば、以下の効果が得られる。
【0059】
本実施形態に係る粒子計測装置1および粒子計測方法によれば、空気中を浮遊して沈降する粒子を捕集面11に捕集し、その捕集した粒子70を撮像することで、空気中に浮遊する粒子のうち、粒子径の大きな沈降する粒子を捕集し、その捕集した粒子70の数量や長さなどを計測することができる。
【0060】
本実施形態に係る粒子計測装置1および粒子計測方法によれば、粒子の撮像を行い画像データに変換し計測をすることで、粒子の大きさの計測は、粒子が撮像されている画素の数と当該画素の大きさを乗じて粒子の大きさを計測することができる。また、粒子の個数の計測は、前述の粒子が撮像されている画素が連なる単位を1粒子として計測することができる。従って、作業者によって顕微鏡を用いて行う計測に比べて計測精度のバラツキを抑制することができる。また、作業者の習熟度に影響されない粒子計測方法および粒子計測装置1が実現できる。
【0061】
本実施形態に係る粒子計測装置1および粒子計測方法によれば、画像比較工程P142によって、粒子の表面の模様や透明度などを比較の対象として基準画像データと撮像された画像データとの比較を行うことで、基準画像データと同様の粒子を検出することができる。従って、計測された粒子の種類を容易に特定することができる。
【0062】
本実施形態に係る粒子計測装置1および、粒子計測方法によれば、粒子計測装置1と捕集部10が別体で構成されることで、複数の計測場所における粒子の捕集と計測をおこなうことができる。また、捕集部10の部材を選択することで様々な計測を行う環境に対応することがでる。例えば、耐熱性を有するガラス板で捕集部10を構成した場合、加熱炉内に浮遊する粒子の捕集を行い、粒子の捕集後に粒子計測装置1で粒子の計測を行うことによって、粒子計測装置1の設置が難しい環境に浮遊して沈降する粒子の計測ができる。
【0063】
本実施形態に係る粒子計測装置1および、粒子計測方法によれば、粒子の沈降方向に対して逆方向から撮像をすることで、粒子の沈降を妨げることなく捕集した粒子を撮像することができる。撮像部20は、捕集部10の下部に設置されて撮像するため、濾紙など不透明な部材で形成された捕集部を用いて、捕集された粒子を撮像する場合のように、捕集面11を撮像部20の受光面の方向に向けることなく撮像ができる。
【0064】
(第二実施形態)
図4は、第二実施形態に係る、粒子の捕集部と撮像部との配置を模式的に示す図である。図4を参照して、本実施形態の粒子計測装置1の構成と粒子計測方法の流れを説明する。
【0065】
本実施形態は、撮像部20と、捕集部10とが一体として構成されている点で、前述の第一実施形態で説明した粒子計測装置1と異なっている。その他、第一実施形態と同様であるため、同様の構成および工程は同様の符号を付して説明は省略または簡略とする。
【0066】
本実施形態の粒子計測装置1は、沈降する粒子を撮像部20の後述する受光面に捕集し、捕集した粒子の計測を行う粒子計測装置1である。本実施形態の粒子計測装置1は、沈降する粒子を捕集し、捕集した粒子を撮像する撮像部20を備えている。
【0067】
図4に示すように、本実施形態の撮像部20は、撮像部20を構成する受光面(図示省略)を捕集面21とし、粒子の沈降する方向に対して逆方向に向けて外装筐体の上面に設置されている。従って、粒子計測する場所に粒子計測装置1を設置して、粒子の捕集と計測を行う。なお、設置された撮像部20(捕集面21)には、設置した上部の空間を浮遊する粒子のうち、第一実施形態同様に、概ね10μm以上の比較的大きな粒子が沈降して捕集し撮像される。この動作が捕集工程P110となる。
【0068】
上述した第二実施形態によれば、以下の効果が得られる。
【0069】
本実施形態の粒子計測装置1および粒子計測方法によれば、捕集部10は、撮像部20と一体として構成し、粒子の捕集と計測を行う。従って、作業者が捕集部10を撮像部20に載置しないため、計測の簡易化を図ることができる。また、プログラムの実行により例えば、操作部31で設定した時刻に粒子の計測を開始または、終了することができる。また、操作部31で設定した時間間隔で連続して捕集した粒子の計測を行うことができる。
【0070】
(第三実施形態)
図5は、第三実施形態に係る、粒子計測装置1の構成を模式的に示すブロック図である。図6は、粒子計測方法の各工程を示すフロー図である。図7は、図5の粒子計測装置1に係る、粒子の撮像部と除去部との配置を模式的に示す図である。
【0071】
図5から図7を参照して、本実施形態の粒子計測装置1の構成と、粒子計測方法の流れを説明する。本実施形態では、捕集面に捕集されている粒子の除去を行う除去工程と、除去工程を実行する除去部50を備えている。この点で、前述の第二実施形態で説明した粒子計測装置1および粒子計測方法と異なっている。その他、粒子計測装置1の構成および、粒子計測工程は、前述の第二実施形態と同様であるため、同様の部分は構成および工程には同様の符号を付して説明は省略または簡略とする。
【0072】
図5に示すように、本実施形態の粒子計測装置1は、第二実施形態での粒子計測装置1の構成に加えて、捕集面21に捕集した粒子70を除去する除去部50を有して構成されている。
【0073】
また、図6に示すように、本実施形態の粒子計測方法は、計測処理工程P140が完了した後に、捕集面21に捕集されている粒子70の除去を行う除去工程P150を備えている。また、計測開始する前作業として、捕集面21に付着している粒子の除去を、除去部50を作動させ行う。この作業は、操作部31からの作業者の操作指示によって行われる。
【0074】
撮像部20と除去部50の配置関係について説明する。図7に示すように、除去部50は、撮像部20の捕集面21に密接して配置される。なお、撮像部20の配置は、第二実施形態と同様に、外装筐体の上面に設置されている。
【0075】
次に除去部50での構成等に関して説明をする。除去部50は、粘性を有する弾性部材で形成されたローラーで構成され、図示は省略するが、ローラーを駆動させる駆動部を備える。詳細には、ブチル系合成ゴムで形成されたローラーを用いる。除去部50は、ローラーを捕集面21に密着させて回転することで、捕集面21に捕集されている粒子70をローラーに付着させて粒子を除去する。なお、除去部50は、粘性を有し粘性が捕集面21に転写しないゴム部材がよく、例えば、ウレタンゴムも用いることもできる。
【0076】
上述した第三実施形態によれば、以下の効果が得られる。
【0077】
本実施形態の粒子計測装置1によれば、除去部50が粘性を有する弾性部材を備えることで、粒子を付着させて除去を行うことで、一度計測した粒子が重複して計測されることを抑制し、また、除去を行った粒子の飛散を抑制することができる。従って、例えば、作業者が介在しなくても、一定時間の間に、沈降する粒子の計測を連続しておこなうことができる。さらに、除去された粒子は除去部50のローラーに保持されているため計測後に除去された粒子を試料として収集することができる。
【符号の説明】
【0078】
1…粒子計測装置、10…捕集部、11…捕集面、12…裏面、20…撮像部、21…捕集面、31…操作部、32…表示部、40…計測処理部、41…計測部、43…出力部、44…記録部、45…保存部、50…除去部、70…粒子、410…撮像データ変換部、420…画像比較部、421…画像記憶部、P110…捕集工程、P120…撮像工程、P131…操作工程、P132…表示工程、P140…計測処理工程、P141…撮像データ変換工程、P142…画像比較工程、P143…画像記憶工程、P144…出力工程、P145…記録工程、P146…保存工程、P150…除去工程。
【特許請求の範囲】
【請求項1】
空気中を浮遊して沈降する粒子を捕集面に捕集する捕集工程と、
前記捕集面に捕集された前記粒子を撮像する撮像工程と、
前記粒子の計測を行う計測工程と、
を備えることを特徴とする粒子計測方法。
【請求項2】
請求項1に記載の粒子計測方法であって、
前記計測工程は、前記撮像工程で撮像された撮像データを前記粒子の画像データに変換し、当該画像データに基づいて前記粒子の数量計測および、長さ計測を含む計測を行う計測処理工程を備えること、を特徴とする粒子計測方法。
【請求項3】
請求項1または請求項2に記載の粒子計測方法であって、
前記計測工程は、前記粒子の基準となる基準画像データを有し、当該基準画像データと前記画像データとを比較する画像比較工程を備えていること、を特徴とする粒子計測方法。
【請求項4】
請求項1から請求項3のいずれか一項に記載の粒子計測方法であって、
前記撮像工程は、前記捕集面を基準として、前記粒子の沈降方向に対して逆方向から撮像をすることを特徴とする粒子計測方法。
【請求項5】
請求項1から請求項4のいずれか一項に記載の粒子計測方法であって、
前記粒子の除去を行う除去工程を備えていることを特徴とする粒子計測方法。
【請求項6】
請求項5に記載の粒子計測方法であって、
前記除去工程は、粘性を有する弾性部材に前記粒子を付着させて除去を行うことを特徴とする粒子計測方法。
【請求項7】
空気中を浮遊して沈降する粒子を捕集する捕集面を有する捕集部と、
前記捕集部に捕集された前記粒子を撮像する撮像部と、
前記粒子の計測を行う計測処理部と、
を備えることを特徴とする粒子計測装置。
【請求項8】
請求項7に記載の粒子計測装置であって、
前記計測処理部は、前記撮像部で撮像された撮像データを前記粒子の画像データに変換し、当該画像データに基づいて前記粒子の数量計測および長さ計測を含む計測を行う計測部を備えることを特徴とする粒子計測装置。
【請求項9】
請求項7または請求項8に記載の粒子計測装置であって、
前記計測部は、前記粒子の基準となる基準画像データを記憶する基準画像データ記憶部を有し、当該基準画像データと前記画像データとを比較する画像比較部を備えていることを特徴とする粒子計測装置。
【請求項10】
請求項7から請求項9のいずれか一項に記載の粒子計測装置であって、
前記捕集部は、透明の板状部材を有して構成され、前記撮像部を前記粒子の沈降方向とは逆方向に配置し、撮像を行うことを特徴とする粒子計測装置。
【請求項11】
請求項7から請求項10のいずれか一項に記載の粒子計測装置であって、
前記捕集部は、前記撮像部と一体または別体に構成されていることを特徴とする粒子計測装置。
【請求項12】
請求項7から請求項11のいずれか一項に記載の粒子計測装置であって、
前記粒子の除去を行う除去部を備えていることを特徴とする粒子計測装置。
【請求項13】
請求項12に記載の粒子計測装置であって、
前記除去部は、前記粒子を付着する粘性を有する弾性部材を備えていることを特徴とする粒子計測装置。
【請求項1】
空気中を浮遊して沈降する粒子を捕集面に捕集する捕集工程と、
前記捕集面に捕集された前記粒子を撮像する撮像工程と、
前記粒子の計測を行う計測工程と、
を備えることを特徴とする粒子計測方法。
【請求項2】
請求項1に記載の粒子計測方法であって、
前記計測工程は、前記撮像工程で撮像された撮像データを前記粒子の画像データに変換し、当該画像データに基づいて前記粒子の数量計測および、長さ計測を含む計測を行う計測処理工程を備えること、を特徴とする粒子計測方法。
【請求項3】
請求項1または請求項2に記載の粒子計測方法であって、
前記計測工程は、前記粒子の基準となる基準画像データを有し、当該基準画像データと前記画像データとを比較する画像比較工程を備えていること、を特徴とする粒子計測方法。
【請求項4】
請求項1から請求項3のいずれか一項に記載の粒子計測方法であって、
前記撮像工程は、前記捕集面を基準として、前記粒子の沈降方向に対して逆方向から撮像をすることを特徴とする粒子計測方法。
【請求項5】
請求項1から請求項4のいずれか一項に記載の粒子計測方法であって、
前記粒子の除去を行う除去工程を備えていることを特徴とする粒子計測方法。
【請求項6】
請求項5に記載の粒子計測方法であって、
前記除去工程は、粘性を有する弾性部材に前記粒子を付着させて除去を行うことを特徴とする粒子計測方法。
【請求項7】
空気中を浮遊して沈降する粒子を捕集する捕集面を有する捕集部と、
前記捕集部に捕集された前記粒子を撮像する撮像部と、
前記粒子の計測を行う計測処理部と、
を備えることを特徴とする粒子計測装置。
【請求項8】
請求項7に記載の粒子計測装置であって、
前記計測処理部は、前記撮像部で撮像された撮像データを前記粒子の画像データに変換し、当該画像データに基づいて前記粒子の数量計測および長さ計測を含む計測を行う計測部を備えることを特徴とする粒子計測装置。
【請求項9】
請求項7または請求項8に記載の粒子計測装置であって、
前記計測部は、前記粒子の基準となる基準画像データを記憶する基準画像データ記憶部を有し、当該基準画像データと前記画像データとを比較する画像比較部を備えていることを特徴とする粒子計測装置。
【請求項10】
請求項7から請求項9のいずれか一項に記載の粒子計測装置であって、
前記捕集部は、透明の板状部材を有して構成され、前記撮像部を前記粒子の沈降方向とは逆方向に配置し、撮像を行うことを特徴とする粒子計測装置。
【請求項11】
請求項7から請求項10のいずれか一項に記載の粒子計測装置であって、
前記捕集部は、前記撮像部と一体または別体に構成されていることを特徴とする粒子計測装置。
【請求項12】
請求項7から請求項11のいずれか一項に記載の粒子計測装置であって、
前記粒子の除去を行う除去部を備えていることを特徴とする粒子計測装置。
【請求項13】
請求項12に記載の粒子計測装置であって、
前記除去部は、前記粒子を付着する粘性を有する弾性部材を備えていることを特徴とする粒子計測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−83242(P2012−83242A)
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願番号】特願2010−230297(P2010−230297)
【出願日】平成22年10月13日(2010.10.13)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願日】平成22年10月13日(2010.10.13)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]