
粒子計量システム、粒子計量方法、プラント劣化検知システムおよびプラント劣化検知方法
【課題】 粒子捕捉手段で捕捉した粒子の高濃度化の効果を減殺することなく、粒子センサの正確なキャリブレーションを行うに十分な時間を確保できるセンサ配置位置を実現する。また、流速に依存しない出力値を得る。
【解決手段】 流体が流れる配管15の近傍または内部に第1粒子捕捉手段を設け、流れの方向16の下流側の配管15の近傍または内部に粒子センサ12および第2粒子捕捉手段28を配置する。第1粒子捕捉手段11によって流体内に存在する粒子17を所定時間捕捉し、これを解放すると共に第2粒子捕捉手段28による粒子17の捕捉を開始する。その後、粒子センサ12のキャリブレーションを実行し、観測領域18に到達した粒子17の数量を粒子センサ12で計量する。
【解決手段】 流体が流れる配管15の近傍または内部に第1粒子捕捉手段を設け、流れの方向16の下流側の配管15の近傍または内部に粒子センサ12および第2粒子捕捉手段28を配置する。第1粒子捕捉手段11によって流体内に存在する粒子17を所定時間捕捉し、これを解放すると共に第2粒子捕捉手段28による粒子17の捕捉を開始する。その後、粒子センサ12のキャリブレーションを実行し、観測領域18に到達した粒子17の数量を粒子センサ12で計量する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、流体(気体または液体)内に存在する粒子の数量を計量する技術に関する。特に、流体内の粒子濃度が極めて低い超低濃度状態の粒子計量に適用して好適なものである。また、これら粒子計量技術を応用してプラント等における配管や反応槽の劣化状態をモニタするモニタリング技術に関する。
【背景技術】
【0002】
液体内の粒子量を計量したい要請は多岐に渡る。たとえば、内燃機関におけるエンジンオイル内にはピストンとピストンリングとの摩擦によって発生する金属粉が混入する。この金属粉の量はエンジンの劣化状態を示す指標として利用できるし、また、エンジンオイルの交換時期を示す指標にもなる。このようなエンジンオイル内の金属粉量を計測できれば、エンジンの過度な劣化を防止し、適正なオイル交換時期を知ることができる。
【0003】
また、たとえば原子炉等のプラントにおいて、その劣化状態を知ることは極めて重要である。プラントにおける劣化モードは多数存在し、一概にその劣化度合いを論ずることはできないが、たとえば長期間の使用により配管の肉厚が減少するような劣化の場合には、削れた配管材料が冷却水等配管内を流れる流体内に混在しているはずであり、この流体内の研削物の量をモニタできればプラントの劣化状態を知ることができる。
【0004】
しかし、これら流体内の粒子量をモニタすることは容易ではない。これら流体内の粒子は、正常稼動状態においては理想的には存在しない異物であり、存在したとしても極めて微量なものだからである。また、内燃機関、プラント等に異常を来たした後に粒子(異物)を検知したとしてもその目的を達することはできないので、正常稼動状態における異物量がごく僅か増加したことを検知する必要がある。本来微量である異物のごく僅かな増加を検知する必要があることからその困難性は極めて高いことは容易に推察できるであろう。
【0005】
微量な異物検出の可否は、検出装置(センサ)の感度に依存する。微量検出の要請からセンサには高い感度が要求される。ところが、センサ感度を向上すると、一般的にセンサのドリフトが問題になり、また、ノイズ耐性が低下する問題がある。たとえば、特許文献1に記載のような、励磁電流によって電磁石化される検出用コイルヘッドと検出用コイルヘッドに励磁電流を供給する発振同調回路とを備え、検出用コイルヘッドをエンジンオイル中の金属粉を吸着するよう構成し、発振同調回路によって吸着金属粉の量に応じた検出用コイルヘッドのインダクタンス値を計測する方式のオイルチェックセンサにおいては、やはりセンサベースラインの変動(ドリフト)が問題となり、高精度な異物(粒子)濃度の検出は困難である。
【特許文献1】特開2000−321248
【0006】
上記のような問題に鑑み、本発明者らのグループは、低濃度異物(金属粉)の検出が可能な異物検出システムの発明(以下「先行発明」という)を為し、本願と同一の出願人によって特願2004−41766号として特定される特許出願(以下「先行出願」という)をした。上記先行発明は、異物を一定時間捕捉してその領域における異物濃度を高め、その捕捉を解放した時点での異物濃度を計測することによって低濃度異物の検知を行おうとするものである。ここで先行発明では、異物捕捉手段とセンサとを位置的に分離し、異物捕捉手段によって異物を捕捉している段階ではセンサの観測領域には異物は存在しないようにする。よって、センサはその観測直前にキャリブレーションを行うことが可能になり、ベースラインの変動(ドリフト)の影響を取り除くことができる。このような先行発明により、本来低濃度な異物であっても異物捕捉手段によって濃度を高めることができ、かつ、測定直前のキャリブレーションによってベースライン変動の影響を取り除くことが可能となり、極めて低濃度な異物を高精度に測定することができるようになる。
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところが、先行発明には、さらなる改善の余地があることを本発明者らは認識した。すなわち、先行発明においては、センサで異物検出を行う前に異物捕捉手段によって異物濃度を高め、かつ、センサのキャリブレーションを行うが故に高精度な異物検出が可能になる。ここで注意を要するのは、センサのキャリブレーションは、異物捕捉手段による異物の解放が行われた後に実行する必要があることである。つまり、キャリブレーションと測定との間に異物の解放操作が介在すると、その解放操作に起因するノイズが発生し、センサ出力にノイズの影響が混入してしまうためである。従って、異物解放の後にキャリブレーションを実行しようとすると、キャリブレーションの時点ではセンサの観測領域に異物があってはいけないあるいは極めて少ない必要があることから、異物捕捉手段をセンサ観測領域から十分離れた位置に配置する必要がある。
【0008】
しかしながら、異物捕捉手段をセンサの観測領域からキャリブレーションに必要な時間を確保するに十分な距離だけ離して設置すると、折角集めた異物がセンサ観測領域に移動するまでの間に拡散してしまい、濃度を高めた効果が減殺されてしまう。つまり、異物濃度を高めた効果を得ようとすれば、センサ観測領域を異物捕捉領域にできる限り近づける必要があるが、そうするとキャリブレーションの確度が低下してしまう(ある程度の異物が観測領域に到達してしまう)。すなわち、異物の高濃度化とキャリブレーションの確度とはトレードオフの関係にある問題がある。
【0009】
上記のような問題があっても、先行出願に係る先行発明がキャリブレーションの確度の範囲内で粒子計量に供することが可能なことはもとよりである。しかし、先行発明の構成では、捕捉により濃縮した粒子の計量は、観測領域に到達した段階での粒子濃度を反映して測定することになるから、測定値は、捕捉粒子の解放から観測領域に到達するまでの間に拡散した度合いを大きく反映することになる。つまり、拡散の度合いは、粒子解放から観測領域に到達するまでの時間に依存し、観測領域に粒子(群)が到達するまでの時間は粒子が存在する流体の流速に依存する。つまり、先行発明では、粒子が存在する流体の流速が変化すると出力値が大きく変動する問題がある。
【0010】
本発明の目的は、異物捕捉手段で捕捉した異物の高濃度化の効果を減殺することなく、正確なキャリブレーションを行うに十分な時間を確保できるセンサ配置位置を実現できる先行発明類似の粒子計量手法を提供することにある。また、粒子が存在する流体の流速に依存しない出力値を得ることができる先行発明類似の粒子計量手法を提供することにある。本発明の他の目的は、先行発明では、異物として磁性体を前提としていたところ、これをあらゆる材料からなる粒子に適用可能とする技術を提供することにある。本発明のさらに他の目的は、本明細書で提示する粒子計量についての技術をプラント等の劣化検知に適用し、極めて早い段階で劣化を高精度に検知できるシステムおよび方法を提供することにある。
【課題を解決するための手段】
【0011】
本明細書で開示する発明は、以下の通りである。すなわち、本発明の粒子計量システムは、所定方向への流れを有する液体または気体内に存在する粒子の数または量を非接触で測定する粒子計量システムであって、前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置され、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する。このような粒子計量システムによれば、第1の粒子捕捉手段で粒子濃度を高め、流れの下流に位置する粒子センサによって粒子の数量を計量できる。言葉を変えて言えば、第1の粒子捕捉手段によって粒子濃度を高めることは、一定時間の粒子の捕捉によって実現できるのであるから、測定にかかる時間を長くして測定の感度を高めていることに相当する。つまり、本発明が基礎とする測定手法は、時間の次元を粒子数(粒子密度)の次元に変換する次元変換の概念を利用し、いわば時間積分によって測定感度を向上するようにしているといえる。従って、本発明によれば、極めて濃度の低い粒子の濃度測定を正確に行うことが可能になる。
【0012】
なお、ここで、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有することができる。第2の粒子捕捉手段を備えることにより、第1の粒子捕捉手段で高濃度化した粒子が粒子センサの観測領域に到達するまでの間に拡散しても再度観測領域において粒子の濃度を高めることができる。この結果、粒子センサを第1の粒子捕捉手段から十分に離して配置することが可能になり、粒子センサのキャリブレーションを安定かつ正確に行うことができる。つまり、本願発明を別の観点から捉えると、前記第1の粒子捕捉手段が前記粒子を解放した後に、解放された前記粒子が前記観測領域に到達するまでの時間が、前記粒子センサをキャリブレーションするに必要な時間以上であるよう前記粒子センサを前記第1の粒子捕捉手段から離して配置する粒子計量システムとすることができる。なお、本明細書において「キャリブレーション」は、センサ出力が0である(センサの観測領域に粒子が存在しない)と推定できるときの出力を「0」として出力補正(ゼロ点校正)を行うことを意味する。ゼロ点校正の方法には各種の手法が存在し、たとえば、キャリブレーション実行時のセンサ出力が「0」になるよう出力回路にバイアスを付加する方法や、キャリブレーション実行時のセンサ出力を記録しておき、後の測定時におけるセンサ出力に先に記録したキャリブレーション時の出力値を補正値として付加する方法を採用できる。粒子センサのキャリブレーションや出力測定に際して、適当な積分回路(ローパスフィルタ)を介した測定や、複数サンプルの取得および演算による平均値の採用により、高い周波数のノイズを除去し、測定値の精度を高めるようにすることができるのは言うまでもない。
【0013】
上記発明において、粒子の捕捉手段としては、以下のようなものを適用できる。すなわち、粒子に磁性体を含む場合には、永久磁石、電磁石等の磁力を利用できる。あるいは、粒子が誘電体、導電体あるいは半導体であって、それが存在する流体が絶縁体である場合には、適当な電荷付与手段を設けて粒子に電荷を付与し、静電力を利用できる。あるいは、流れを構成する物質(流体)を透過し粒子の透過を阻害する濾過手段を捕捉手段として利用できる。この場合、捕捉した粒子の解放は、濾過手段の流れに対する方向を反転することにより行うことができる。あるいは、粒子がガス等の気体である場合には、粒子を選択的に吸着する吸着材を捕捉手段として利用でき、捕捉した粒子の解放は吸着材を加熱することにより行うことができる。
【0014】
また、上記発明において、粒子センサとしては、以下のようなものが適用できる。すなわち、粒子が導電体または半導体の場合には、粒子センサに誘導素子を適用し、誘導素子または励磁用誘導素子によって発生させた外部交流磁界による導電体または半導体内部の渦電流に起因する前記誘導素子のインダクタンス変化によって、粒子の数または量を計測できる。あるいは、粒子が磁性体である場合には、粒子センサに磁界を発生する磁界発生手段を備え、センサとしてホール素子を適用し、ホール素子が検知する磁界の変動によって、粒子の数または量を計測できる。あるいは、粒子が誘電体である場合には、粒子センサとして容量素子を適用し、容量素子のキャパシタンスの変化によって、粒子の数または量を計測できる。あるいは、粒子センサにレーザー光発生手段および散乱光測定手段を備え、レーザー光が粒子によって散乱された散乱光の強度によって、粒子の数または量を計測することができる。あるいは、粒子がガス状分子である場合、粒子センサとしてガス状分子の数または濃度を計測するガスセンサを適用できる。
【0015】
以上のとおり、本願発明の粒子計量システムにおいては、各種の粒子捕捉手段および粒子センサを適用することが可能である。しかし、これら捕捉手段およびセンサは、粒子の種類や、流体の容器・配管の材料によってその有効性や適用の可否が相違する。たとえば、常磁性体材料の粒子や磁性体材料の容器・配管には磁気的作用を利用した粒子捕捉手段は適用できないし、導電体材料の容器・配管には静電的作用を利用した粒子捕捉手段は適用できない。また、絶縁体材料の粒子には渦電流を利用した誘導素子によるセンサは適用できない。その他、粒子の捕捉やセンシングの基礎とする物理現象によってそれら捕捉やセンシングが特定の粒子あるいは容器・配管材料で使用できたりできなかったりすることは当業者に容易に理解できるであろう。しかしながら、上記した粒子捕捉手段および粒子センサが、その基礎とする物理現象に即して、特定の粒子材料および容器・配管材料において使用できる限り、これら捕捉手段およびセンサを任意に組合せ、本願の粒子計量システムに適用可能なことは言うまでもない。上記した粒子捕捉手段あるいは粒子センサは単独で用いることも可能であるし、複数の粒子捕捉手段あるいは複数の粒子センサとして組み合わせて適用することも可能である。なお、磁気的、静電的、光学的な捕捉・センシング手法を適用する場合には、粒子および粒子が存在する流体に非接触で粒子の計量が行える。
【0016】
上記した粒子計量システムにおいては、以下のような粒子計量方法を適用できる。すなわち、本願の他の発明である粒子計量方法は、所定方向への流れを有する液体または気体内に存在する粒子の数または量を測定し、前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置されその観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する粒子計量システムを用いた粒子計量方法であって、前記第1の粒子捕捉手段により、所定の捕捉時間の間前記粒子を捕捉するステップと、捕捉された前記粒子を解放するステップと、前記粒子の解放の後に、前記粒子センサのキャリブレーションを実行するステップと、前記粒子センサによる測定を開始するステップと、を有する。このような粒子計量方法によれば、粒子を所定の捕捉時間だけ捕捉するため、粒子濃度を高めることが可能になり、粒子の解放後に粒子センサのキャリブレーションを行って粒子の計量を開始するので、粒子解放に伴うノイズの発生を避けると共にセンサのベースライン変動の影響を排除することができる。本発明の構成においては、前記した時間の次元を粒子数(粒子密度)の次元に変換する次元変換の概念が端的に現れる。すなわち時間次元における測定時間(捕捉時間)を長くすることによって観測粒子数(粒子密度という空間的距離の次元)を高め、粒子計量システム全体の感度向上を図るという効果に繋げている。
【0017】
ここで、前記粒子計量システムには、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段を含み、前記第1の粒子捕捉手段による前記粒子の捕捉中または捕捉された前記粒子の解放後であって前記粒子センサのキャリブレーション前に、前記第2の粒子捕捉手段による前記粒子の捕捉を開始するステップを有することができる。このような第2の粒子捕捉手段によって粒子センサの観測領域に粒子を捕捉するようにするため、第1の粒子捕捉手段で濃縮した粒子がその解放によって拡散を開始したとしても、粒子センサの観測領域で再度濃縮されるため、粒子センサの出力を高めることができる。本発明では、第2の粒子捕捉手段の捕捉の開始を粒子センサのキャリブレーション前に行うため、第2の粒子捕捉手段の捕捉操作に伴うノイズの影響を受けることがない。
【0018】
上記粒子捕捉方法において、前記粒子センサの出力値が所定の閾値以上である場合には、前記出力値または前記出力値から計算された値を表示するステップと、前記粒子センサの出力値が前記所定の閾値未満である場合には、前記捕捉時間をより長く変更し、前記第1の粒子捕捉手段による前記粒子の捕捉からの一連の前記ステップを繰り返すステップと、を有することができる。このような構成を有することにより、粒子計量システムの感度が不足する場合には、時間次元における捕捉時間を長くして粒子計量システムの感度を高めることができる。なお、前記捕捉時間が所定の閾値以上である場合、前記粒子を検出できないと判断することができる。現実的な測定時間内に測定できない場合は本粒子計量システムの測定限界を超えたと判断するものである。
【0019】
上記した粒子計量システムおよび粒子計量方法は、これをプラントの劣化検知に適用することができる。プラントを構成する配管あるいは反応槽では、その内部にたとえば反応液あるいは冷却液が循環している。これら反応液や冷却液によって配管や反応槽の内壁が削られ劣化する場合があることは一般に知られている。このような循環液によって研削された研削滓は、これを積極的に取り除かない限り、循環液内に拡散され、循環液とともに配管内を循環することになる。本願のプラント劣化検知システムおよび方法は、このように配管内を循環している研削滓を粒子と捉え、研削滓(粒子)の数量の上昇がプラントの劣化度合いを反映しているとの認識を基礎として、上記した粒子計量システムおよび粒子計量方法を適用し、プラントの劣化検知に応用しようとするものである。
【0020】
その具体的な構成は、以下の通りである。すなわち、本願発明のプラント劣化検知システムは、その内部に流体が流れる配管を有するプラントにおける前記配管または前記プラントの反応槽の劣化を検知するプラント劣化検知システムであって、前記配管の外部に配置され、前記流体の流れに抗して前記配管または前記プラントの反応槽を構成する材料または前記材料の化合物からなる粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置であって前記配管の外部に配置される、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する。なお、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有することができる。
【0021】
上記プラント劣化検知システムで適用できる粒子捕捉手段および粒子センサは、上記した粒子計量システムの場合と同様である。また、プラント劣化検知システムに適用できるプラント劣化検知方法についても、上記した粒子計量方法と同様である。ただし、プラント劣化検知方法においては、粒子濃度が所定の閾値以上であるか否かを判断すれば足りる。
【0022】
本願発明で利用する粒子検知手法は極めて低い濃度の粒子を正確に検知することが可能であるため、早い段階でのプラントの劣化を検知することが可能となる。しかも、粒子捕捉手段および粒子センサを適切に選択すれば、粒子検出を非接触で行うことが可能になるため、既に設置されているプラントに、大幅な改造を加えることなくこれを適用できる。また、プラントの設計においても大きな負担を強いることなく、本発明の劣化検知手法を適用することができる。
【発明の効果】
【0023】
本願発明によれば、粒子捕捉手段で捕捉した粒子の高濃度化の効果を減殺することなく、粒子センサの正確なキャリブレーションを行うに十分な時間を確保できるセンサ配置位置を実現できる。また、流速に依存しない出力値を得ることが可能になる。また、あらゆる材料からなる粒子に適用可能な粒子計量手法を提供できる。さらに、極めて早い段階でプラントの劣化を高精度に検知できるプラント劣化検知システムおよび方法を提供できる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。まず、本発明の一実施の形態である粒子計量システムについて2例の基本構成を例示し、さらにその2例の基本構成における各構成要素に適用可能な具体的要素を例示する。その後、各具体的要素の基本構成への適用可能性について説明し、ある具体的な構成における粒子計量システムの実際の動作結果について説明する。最後に本粒子計量システムのプラント劣化検知システムへの応用について説明し、各種変更例に言及する。なお、以下説明する図面において、同一の機能を有する部材については同一の符号を使用し、重複した説明は省略するものとする。
【0025】
1.粒子計量システムの基本構成
1.1 第1構成例
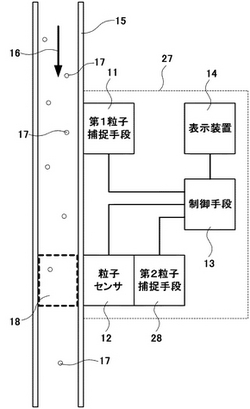
図1は、本発明の一実施の形態である粒子計量システムについてその基本的構成の一例である第1構成例を示したブロック図である。本第1構成例は、粒子計量システムに粒子捕捉手段を1つ設ける例である。本第1構成例の粒子計量システム10は、第1粒子捕捉手段11、粒子センサ12、制御手段13および表示装置14を有する。
【0026】
第1粒子捕捉手段11は、配管15の近傍または内部に配置され、制御手段13の制御によって、配管15内を矢印16の方向に流れる流体内に存在する粒子17を捕捉する機能を持つ。また、捕捉した粒子17を制御手段13の制御によって解放する機能を有する。これら機能を実現する手法としては各種の手法がある。たとえば、粒子17が磁性体である場合には外部磁場を粒子17に及ぼして磁気的作用により粒子17を捕捉できる。あるいは、粒子17に電荷を付与できる場合には、クーロン力を利用して静電吸着することができる。あるいは、機械的、物理的作用により粒子17を捕捉あるいは吸着することができる。第1粒子捕捉手段11の具体的な構成については後に説明する。なお、図1では、第1粒子捕捉手段11は、配管15の外側に配置されているように図示してあるが、第1粒子捕捉手段11の具体的構成によっては配管15の内部にその一部または全部が配置される場合もある。
【0027】
粒子センサ12は、配管15の近傍または内部に配置され、観測領域18内にある粒子17の数量を検知する機能を有する。また、粒子センサ12は、制御手段13によって制御され、制御手段13からの制御によりキャリブレーションおよび粒子検知を実行する。粒子17の検知手法としては各種の手法がある。たとえば、粒子17が導電体あるいは半導体である場合、外部交流磁場の作用によって粒子17内に渦電流を発生させ、この渦電流に起因する検知コイルのインダクタンスの変化を計測して粒子17を検知できる。あるいは、粒子17が高透磁率材料である場合、外部磁場の変動を計測して粒子17を検知できる。あるいは、粒子17が高誘電率材料である場合、検知コンデンサのキャパシタンス変化を計測して粒子17を検知できる。あるいは粒子17が光を反射または吸収する材料である場合には、散乱光あるいは透過光を計測して粒子17を検知できる。あるいは、粒子17がガスである場合には、ガス吸着によって抵抗率等が変化する物理現象を利用したガスセンサを用いて粒子17を検知できる。粒子センサ12の具体的な構成については後に説明する。なお、図1では、粒子センサ12は、配管15の外側に配置されているように図示してあるが、粒子センサ12の具体的構成によっては配管15の内部にその一部または全部が配置される場合もある。
【0028】
制御手段13は、第1粒子捕捉手段11、粒子センサ12および表示装置14を制御する。制御手段13の具体的な機能および構成は、第1粒子捕捉手段11および粒子センサ12や表示装置14の具体的構成によって相違するものの、基本的には、第1粒子捕捉手段11に制御信号を発生し、粒子センサ12から出力信号を受け、受信した出力信号をそのままあるいは濃度換算のための必要な演算を実行した後に表示装置14に送信する。また、制御手段13は必要なタイミングで粒子センサ12のキャリブレーションを実行する。さらに制御手段13は、必要に応じて第1粒子捕捉手段11および粒子センサ12に電源を供給する。従って、制御手段13には、第1粒子捕捉手段11への制御信号を生成する信号生成部、粒子センサ12からの出力信号を受信するセンサ信号受信部、表示装置14への信号を生成する表示信号生成部、これらを制御する制御論理部、必要に応じて、濃度計算等の演算を行う演算部、電源を供給する電源供給制御部を有する。制御手段13の具体例としては、後に説明する計量シーケンスを実行できる電子回路ないし論理回路、コンピュータのようなプログラム演算機能を有する情報処理装置を例示できる。
【0029】
表示装置14は、制御手段13からの表示信号を受けて計量結果を表示出力する手段である。具体的には、CRTモニタ、液晶表示装置等の画像表示装置を例示できる。ただし、計量結果を表示できる限り、画像、文字等による表示には限られない。たとえば、音声によって計量結果を読み上げることが可能であるし、また、計量結果がある閾値を越えたことをビープ音によって報知することも可能である。
【0030】
配管15は本粒子計量システム自体を構成するものではないが、その材料物性によっては、前記した第1粒子捕捉手段11または粒子センサ12が依拠する物理現象を効果的に発生させることができない場合がある。そのため、配管15の材料選択は、本粒子計量システムを意図したとおりに動作させる必要上重要である。ただし、第1粒子捕捉手段11および粒子センサ12の具体的構成を適切に選択することにより、本粒子計量システム10は、あらゆる材料の配管15に適用可能である。何れの配管材料が第1粒子捕捉手段11あるいは粒子センサ12のどのような具体的構成において有効あるいは無効であるかは後に説明する。配管15の計測に及ぼす物性的側面を除けば、その材料や形状は特に限定されない。たとえばステンレス配管、鉄(鋼)配管、塩化ビニルその他各種のプラスチック配管等を例示できる。
【0031】
粒子17は、本粒子計量システム10の計量対象であり、前記のとおり、第1粒子捕捉手段11および粒子センサ12が依拠する物理現象によってその材料物性に制限を受ける。ただし、第1粒子捕捉手段11および粒子センサ12の具体的構成を適切に選択することにより、本粒子計量システム10は、あらゆる材料の粒子17の計測に対応可能となる点は配管15の場合と同様である。何れの粒子材料が第1粒子捕捉手段11あるいは粒子センサ12のどのような具体的構成において有効あるいは無効であるかは後に説明する。本粒子計量システムでは、配管15自体や配管15が接続されている内燃機関やプラント等内で機械的磨耗や内部を流れる流体との摩擦により生成される金属粉等の粉体や粒体を想定する。しかし、本発明における粒子17は粉体や粒体に限られるのもではなく、一般的なガス等の単分子状態、希ガス等の原子状態、さらに、複数分子が凝集したクラスタ状態の物質体を含む概念である。流体内に分散されあるいは均一化されて存在できる物質である限り、本発明の粒子17の概念に含まれるものとする。
【0032】
配管15を流れる流体は、動作状態において液体または気体状態の流動物質である。尤も流体にもいくつかの制約がある。たとえば、磁気的作用を利用して粒子17を捕捉あるいは検出する場合には、流体は非磁性(常磁性体)である必要がある。また、粒子17に電荷を付与して静電気作用により粒子17を捕捉する場合には流体は絶縁体である必要があり、かつ、粒子17を構成する物質よりもイオン化エネルギーが大きいことが必要である。ただし、第1粒子捕捉手段11および粒子センサ12の具体的構成を適切に選択することにより、本粒子計量システム10は、あらゆる材料の流体に対応可能となる点は配管15、粒子17の場合と同様である。具体的な流体として、水、オイル、空気等の絶縁体(誘電体)かつ非磁性体(常磁性体)を例示できる。実用的には、磁気流体(磁性体)や電解質溶液(導電体)が用いられることはあまりないので、本粒子計量システムに適用する流体として水、オイル等の絶縁体かつ非磁性体を想定すれば十分であると考えられる。尤も、水内に塩等のイオン性物質(不純物)が混入した場合には静電的手法による粒子捕捉に問題を生じる可能性がある。
【0033】
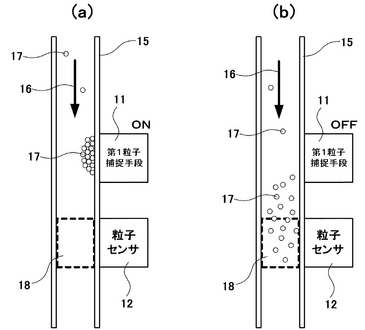
図2は、構成例1の粒子計量システム10の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放され、粒子センサ12の観測領域18まで移動してきた状態を示す。なお図2において、粒子計量システム10の一部は省略している。
【0034】
同図(a)において、第1粒子捕捉手段11はON状態すなわち粒子17を捕捉する状態にある。配管15内を矢印16の方向に流れている流体内には粒子17が存在し、粒子17は、第1粒子捕捉手段11の近傍に到達すると図示するように第1粒子捕捉手段11の周辺に捕捉される。粒子17が捕捉状態にあるとき、流れの下流側に配置されている粒子センサ12の観測領域18には粒子17は到達しないか到達したとしてもごくわずかである。
【0035】
ある程度の量の粒子17が第1粒子捕捉手段11に捕捉された後に、第1粒子捕捉手段11をOFF状態すなわち粒子17を解放する状態にする。同図(b)に示すように粒子17は第1粒子捕捉手段11からの束縛を離れ、流れに従って流体内を拡散しつつ粒子センサ12の観測領域18に到達する。観測領域18に存在する粒子17は、その数量に応じた出力信号を粒子センサ12に出力させる。ここで、粒子17は、同図(a)に示したように第1粒子捕捉手段11によってある程度濃度が高められているので、通常流体内に存在する濃度よりも高い濃度で観測領域18に到達する。よって、粒子センサ12の検出感度を高めなくても、システム全体の粒子検出感度を高めることができる。
【0036】
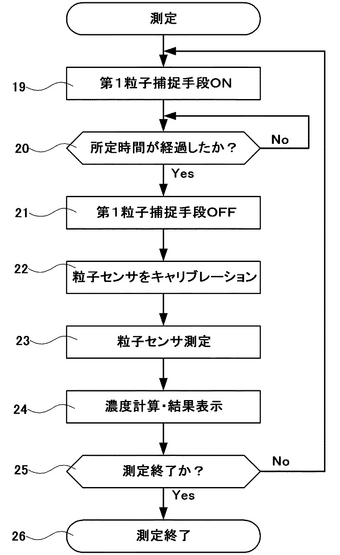
図3は、構成例1の粒子計量システム10の測定方法の一例を示したフローチャートである。第1粒子捕捉手段11の捕捉状態をONにし(ステップ19)、所定時間が経過したかを判断する(ステップ20)。所定時間としてはたとえば10分を例示できる。所定時間を経過するまではステップ20を繰り返す。所定時間を経過したと判断した場合には、第1粒子捕捉手段11の捕捉状態をOFFすなわち解放状態にする(ステップ21)。その後、粒子センサ12のキャリブレーションを実行する(ステップ22)。キャリブレーションを第1粒子捕捉手段11のOFF操作の後に行うので、当該操作に伴うノイズの影響を受けることなくキャリブレーションおよび測定を実行できる。次に、粒子センサ12による測定を実行する(ステップ23)。測定結果は制御手段13において濃度換算の計算が行われ、表示装置14に表示される(ステップ24)。その後、測定終了かを判断し(ステップ25)、再度測定を行う場合にはステップ19からの制御を繰り返し、測定終了の場合は測定を終了する(ステップ26)。
【0037】
上記した構成例1の粒子計量システム10によれば、第1粒子捕捉手段11で粒子17の濃度を予め濃縮し、下流に配置した粒子センサ12によって粒子17の数量測定を行うので、システムの検知感度を高めることができる。また、第1粒子捕捉手段11に粒子17を捕捉している状態および解放直後の状態では、粒子センサ12の観測領域18には粒子17はほとんど存在しない。このため、粒子センサ12のキャリブレーションを実行して、高感度な粒子センサ12であってもそのドリフト(ベースライン変動)の影響を除去し、高精度な測定が実現できる。
【0038】
1.2 第2構成例
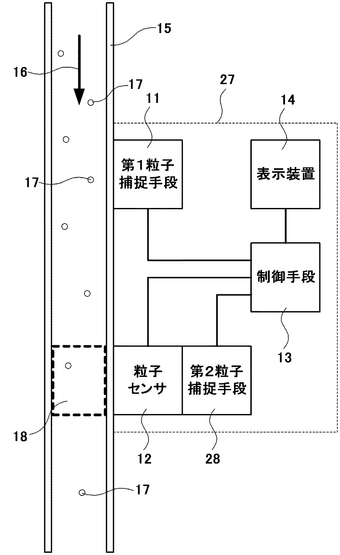
図4は、本発明の一実施の形態である粒子計量システムについてその基本的構成の他の例である第2構成例を示したブロック図である。本第2構成例は、粒子計量システムに粒子捕捉手段を2つ設ける例である。本第2構成例の粒子計量システム27は、第1粒子捕捉手段11、粒子センサ12、制御手段13、表示装置14および第2粒子捕捉手段28を有する。第1粒子捕捉手段11、粒子センサ12、制御手段13および表示装置14は第1構成例の場合と同様であるので説明を省略する。また、配管15、粒子17、配管15内を流れる流体についても構成例1と同様である。
【0039】
第2粒子捕捉手段28が有する機能や必要な条件は第1粒子捕捉手段11と同様である。ただし、第2粒子捕捉手段28は、粒子センサ12の観測領域18において粒子17が捕捉されるように配置する。構成例2の粒子計量システム27が第2粒子捕捉手段28を有することにより、第1粒子捕捉手段11で捕捉し濃縮した粒子17を観測領域18で再度濃縮できるため、構成例1の場合より精密かつ安定な測定を実行できる。
【0040】
図5は、構成例2の粒子計量システム27の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放された状態を、(c)は粒子17が粒子センサ12の観測領域18まで移動しかつ第2粒子捕捉手段28によって捕捉されている状態を示す。なお図5において、粒子計量システム27の一部は省略している。
【0041】
同図(a)において、第1粒子捕捉手段11はON状態すなわち粒子17を捕捉する状態にある。配管15内を矢印16の方向に流れている流体内には粒子17が存在し、粒子17は、第1粒子捕捉手段11の近傍に到達すると図示するように第1粒子捕捉手段11の周辺に捕捉される。粒子17が捕捉状態にあるとき、流れの下流側に配置されている粒子センサ12の観測領域18には粒子17は到達しないか到達したとしてもごくわずかである。
【0042】
ある程度の量の粒子17が第1粒子捕捉手段11に捕捉された後に、第1粒子捕捉手段11をOFF状態すなわち粒子17を解放する状態にする。同図(b)に示すように粒子17は第1粒子捕捉手段11からの束縛を離れ、流れに従って流体内を拡散する。
【0043】
粒子センサ12の観測領域18に到達した粒子17は、第2粒子捕捉手段28によって観測領域18に捕捉される。観測領域18に存在する粒子17は、その数量に応じた出力信号を粒子センサ12に出力させるが、同図(c)に示すように、粒子17の密度は非常に高く濃縮されているので、非常に高い粒子センサ12の出力が期待できる。
【0044】
すなわち、構成例1の場合は、第1粒子捕捉手段11で粒子濃度が高められても、粒子17が観測領域18に到達した段階では有る程度拡散により濃度が低下した状態になるが、本構成例2では、観測領域18で再度濃度が高められるので、粒子センサ12からの高い出力信号が得られる。また、観点を変えて言えば、構成例1の場合、粒子センサ12の出力レベルを十分高く得るためには、粒子17が拡散により濃度が低下する前に観測を行う必要がある。このため、粒子センサ12を第1粒子捕捉手段11から十分に離して配置することができない。このため、粒子センサ12のキャリブレーションを行う時間を確保することが困難な場合が発生する。しかし、本構成例2では、第1粒子捕捉手段11で濃縮した粒子17が拡散しても、第2粒子捕捉手段28によって再度濃縮を行うので、拡散によって粒子17の濃度が低下しても観測領域18で粒子17が捕捉される限り構わない。この結果、粒子センサ12を第1粒子捕捉手段11から十分に離して配置することが可能となり、粒子センサ12のキャリブレーションを行う時間を十分に確保することが可能になる。
【0045】
図6は、構成例2の粒子計量システム27の測定方法の一例を示したフローチャートである。第1粒子捕捉手段11の捕捉状態をONにし(ステップ19)、所定時間が経過したかを判断する(ステップ20)。所定時間としてはたとえば10分を例示できる。所定時間を経過するまではステップ20を繰り返す。所定時間を経過したと判断した場合には、第1粒子捕捉手段11の捕捉状態をOFFすなわち解放状態にする(ステップ21)。その後、第2粒子捕捉手段28をONすなわち捕捉状態にする(ステップ29)。その後、粒子センサ12のキャリブレーションを実行する(ステップ22)。キャリブレーションを第1粒子捕捉手段11および第2粒子捕捉手段のON・OFF操作の後に行うので、当該操作に伴うノイズの影響を受けることなくキャリブレーションおよび測定を実行できる。次に、粒子センサ12による測定を実行する(ステップ23)。測定結果は制御手段13において濃度換算の計算が行われ、表示装置14に表示される(ステップ24)。その後、終始捕捉手段をリセットする(ステップ30)、その後、測定終了かを判断し(ステップ25)、再度測定を行う場合にはステップ19からの制御を繰り返し、測定終了の場合は測定を終了する(ステップ26)。
【0046】
上記した構成例2の粒子計量システム27によれば、第1粒子捕捉手段11で粒子17の濃度を予め濃縮し、下流に配置した粒子センサ12によって粒子17の数量測定を行う。この測定の際には、第2粒子捕捉手段28で観測領域18の粒子17を再濃縮する。このため、システムの検知感度を、粒子17の拡散状態に関わらず高めることができる。また、第1粒子捕捉手段11に粒子17を捕捉している状態および解放直後の状態では、粒子センサ12の観測領域18には粒子17はほとんど存在しない。このため、粒子センサ12のキャリブレーションを実行して、高感度な粒子センサ12であってもそのドリフト(ベースライン変動)の影響を除去し、高精度な測定が実現できる。さらに、第1粒子捕捉手段11と粒子センサ12とを十分に離して配置できるため、前記のキャリブレーションを十分正確に行うことができる。
【0047】
2.具体的構成
2.1 粒子捕捉手段
以下粒子捕捉手段の具体的構成を例示する。なお、以下に説明する具体的構成では、主に粒子捕捉手段が2つ配置された構成(前記第2構成例に対応する)を例示する。しかし、2つの粒子捕捉手段の1つを省略し1つの粒子捕捉手段として適用できるものについては前記第1構成例に適用できることは言うまでもない。また、粒子捕捉手段として単一の粒子捕捉手段を例示している場合には、それが前記第1構成例に適用できることはもとりより、可能な限り二つの粒子捕捉手段として前記第2構成例に適用できることは言うまでもない。
【0048】
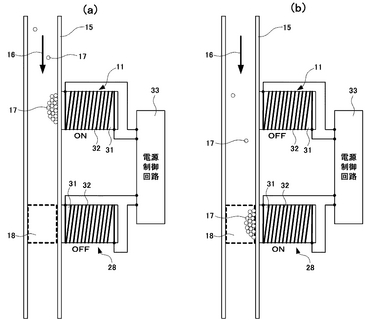
A.電磁石
図7は、粒子捕捉手段の具体的構成を電磁石として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。本例の電磁石は、鋼鉄等強磁性体の磁心31にコイル32を巻きつけた構成を有し、コイル32への通電は電源制御回路33によって制御される。電源制御回路33は制御手段13の一部である。
【0049】
本例の電磁石では、第1粒子捕捉手段11のコイル32に通電し、第1粒子捕捉手段11の磁心31に隣接する配管15内に粒子17を捕捉する。また、第2粒子捕捉手段28のコイル32に通電し、第2粒子捕捉手段28の磁心31に隣接する配管15内に粒子17を捕捉する。これらコイル32への通電の切り替えは電源制御回路33によって行え、前記した構成例1、2の制御が実行できる。
【0050】
なお、本例の電磁石で粒子捕捉手段を構成する場合、粒子17はもとより磁性体である必要がある。その他、配管15が常磁性体(非磁性体)であることも必要である。本例の電磁石で粒子捕捉手段を構成すれば、粒子17の濃縮操作を配管15の外部から非接触で行える利点がある。
【0051】
B.ソレノイド式磁石
図8は、粒子捕捉手段の具体的構成をソレノイド式磁石として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。本例のソレノイド式磁石は、ソレノイド41と駆動用鉄心42と駆動用鉄心42の片辺に備えた永久磁石43とを有し、駆動用鉄心42をソレノイド41の内部に配置する。ソレノイド41への通電によって駆動用鉄心42を駆動し、永久磁石43を配管15の管壁に接触あるいは非接触として粒子17の捕捉あるいは解放を制御する。ソレノイド41への通電は電源制御回路44によって制御する。電源制御回路44は制御手段13の一部である。
【0052】
本例のソレノイド式磁石では、第1粒子捕捉手段11のソレノイド41に通電し、第1粒子捕捉手段11の永久磁石43に隣接する配管15内に粒子17を捕捉する。また、第2粒子捕捉手段28のソレノイド41に通電し、第2粒子捕捉手段28の永久磁石43に隣接する配管15内に粒子17を捕捉する。これらソレノイド41への通電の切り替えは電源制御回路44によって行え、前記した構成例1、2の制御が実行できる。
【0053】
なお、本例のソレノイド式磁石で粒子捕捉手段を構成する場合、粒子17はもとより磁性体である必要がある。その他、配管15が常磁性体(非磁性体)であることも必要である。本例のソレノイド式磁石で粒子捕捉手段を構成すれば、粒子17の濃縮操作を配管15の外部から非接触で行える利点がある。
【0054】
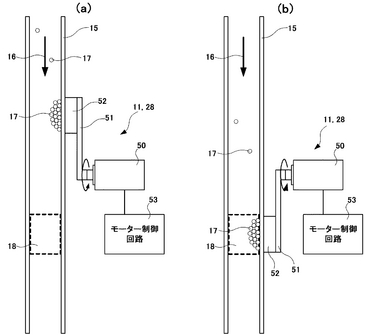
C.モータ駆動式磁石
図9は、粒子捕捉手段の具体的構成をモータ駆動式磁石として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。本例のモータ駆動式磁石は、モータ50とクランク51とクランク51の先端に備えた永久磁石52とを有し、モータ50を回転駆動することによって永久磁石52の位置を移動させ、粒子17の捕捉位置を制御する。モータ50の回転駆動はモータ制御回路53によって制御する。モータ制御回路53は制御手段13の一部である。
【0055】
本例のモータ駆動式磁石では、モータ50を回転駆動し、同図(a)に示す位置で永久磁石52を停止して第1粒子捕捉手段11の粒子捕捉位置に粒子17を捕捉する。また、モータ50を回転駆動し、同図(b)に示す位置で永久磁石52を停止して第2粒子捕捉手段28の粒子捕捉位置に粒子17を捕捉する。モータ50の回転制御はモータ制御回路53によって行え、前記した構成例1、2の制御が実行できる。
【0056】
なお、本例のモータ駆動式磁石で粒子捕捉手段を構成する場合、粒子17はもとより磁性体である必要がある。その他、配管15が常磁性体(非磁性体)であることも必要である。本例のモータ駆動式磁石で粒子捕捉手段を構成すれば、粒子17の濃縮操作を配管15の外部から非接触で行える利点がある。
【0057】
D.荷電集塵方式
図10は、粒子捕捉手段の具体的構成を荷電集塵方式手段として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17'が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17'が捕捉されている状態を示す。本例の荷電集塵方式手段は、プローブ61、第1電極62、第2電極63、高圧電源64、制御電源65、制御回路66を有する。本例の荷電集塵方式手段では、電流導入端子67を介して配管15の内部にプローブ61を導入し、高圧電源64からプローブ61に印加した高電圧(たとえば−1kV)によって粒子17にたとえば負電荷を与える。電荷を与えられた粒子17'は、制御電源65から第1電極62あるいは第2電極63に与えられる電圧によって捕捉されあるいは解放される。制御回路66は高圧電源64および制御電源65を制御し、高圧電源64、制御電源65および制御回路66は制御手段13の一部である。
【0058】
本例の荷電集塵方式手段では、高圧電源64からプローブ61を介して粒子17にたとえば負電荷を付与し、制御電源65によって第1電極62にたとえば正電圧を印加して第1粒子捕捉手段11の粒子捕捉位置に粒子17'を捕捉する。第1粒子捕捉手段11における粒子17'の解放は、第1電極62にたとえば負電圧を印加して行う。また、制御電源65によって第2電極63にたとえば正電圧を印加して第2粒子捕捉手段28の粒子捕捉位置に粒子17'を捕捉する。第2粒子捕捉手段28における粒子17'の解放は、第2電極63にたとえば負電圧を印加して行う。制御電源65による第1電極62および第2電極63への印加電圧極性によって前記した構成例1、2の制御が実行できる。なお、前記した電荷の極性を正電荷に変更できることは言うまでもない。この場合、捕捉あるいは解放動作における制御電圧の極性を逆にすることは勿論である。
【0059】
本例の荷電集塵方式手段で粒子捕捉手段を構成する場合、粒子17は導体、半導体、絶縁体の何れでも構わないが、配管15内を流れる流体の電離度あるいはイオン化エネルギーより小さいことが必要である。また、流体は絶縁体であることを要し、配管15は少なくとも前記各部材が配置される領域では絶縁体である必要がある。
【0060】
E.メッシュ
図11は、粒子捕捉手段の具体的構成をメッシュ(網)として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。メッシュ70は、回転導入端子71に固定され、配管15の外部から回転導入端子71に回転を与えて流体の流れ16に対するメッシュ70の角度を制御する。
【0061】
本例では、第1粒子捕捉手段11のメッシュ70の面を配管15に流れる流体の流れに対向するように配置して粒子17を捕捉する。粒子17の解放は、メッシュ70の面を回転してその法線が流れの方向に対し垂直(流れと面が平行)になるよう、あるいは、メッシュ70の面が逆向きになるまで回転して行う。第2粒子捕捉手段28においても同様に行える。本例の場合、メッシュ70が粒子17を捕捉するに十分な細かな目を必要とするが、粒子17、配管15および流体の電気的物性、磁気的物性に左右されないメリットがある。
【0062】
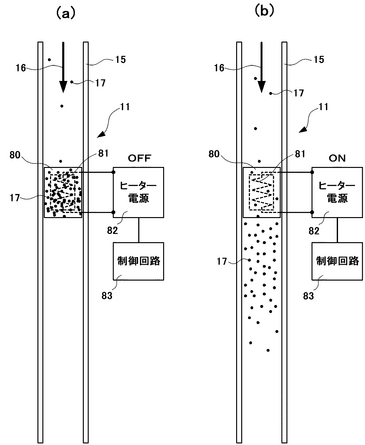
F.吸着材
図12は、粒子捕捉手段の具体的構成を吸着材として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第1粒子捕捉手段11から粒子17が解放されている状態を示す。本例では、粒子捕捉手段として、吸着材80とヒータ81とを有する構成を例示する。吸着材80は、気体である粒子17を吸着する性質を有し、ヒータ81に通電して吸着材80を加熱することにより、粒子17を解放する。ヒータ81はヒータ電源82によって通電され、ヒータ電源82は、制御回路83で制御される。ヒータ電源82および制御回路83は制御手段13の一部である。
【0063】
本例では、吸着材80を室温程度に保持することにより粒子17を吸着し(吸着材の元来有する吸着性能を利用する)、ヒータ81によって吸着材80を加熱することによって粒子17を解放する(吸着物質に熱エネルギーを与えて吸着表面から離脱させる)。吸着材としてはたとえば活性炭を、粒子としては一酸化炭素、ホルムアルデヒド、トルエン、キシレン等の分子状ガス、排ガス中の微粒子物質を例示できる。本例では、粒子17として分子状あるいはそれに類する程度に微細な粒子であることが要求されるが、粒子17、配管15および流体の電気的、磁気的性質に左右されないメリットがある。
【0064】
2.2 粒子センサ
以下粒子センサの具体的構成を例示する。なお、ここで例示する粒子センサは、単独で用いることも可能であるし、組み合わせて適用することも可能である。
【0065】
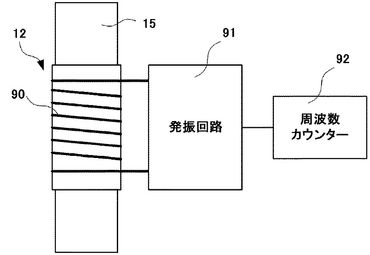
A.渦電流利用方式(1)
図13は、粒子センサ12の一例を示したブロック図である。本例の粒子センサ12は、配管15に巻き付けたコイル90と、発振回路91と、周波数カウンタ92とを有する。コイル90は、発振回路91からの交流電圧(電流)を受けて交流磁界を発生する。観測領域18に粒子17が存在すれば、コイル90からの交流磁界によって粒子17内に渦電流を発生する。渦電流が発生すると、この渦電流に起因する交流磁界が発生し、コイル90に影響を及ぼす。このコイル90への影響はコイル90のインダクタンス変化として観察され、発振回路91の共振周波数(発振周波数)を変動させる。この周波数変動が周波数カウンタ92によって観測され、粒子17を検知することが可能になる。なお、周波数変動の大きさは粒子17の量と正相関の関係にあるため、周波数変動量を観測することによって粒子17の数量を計測できる。
【0066】
本例の粒子センサ12では、粒子17内に渦電流を発生することが要件となるため、粒子17には導電体または半導体が含まれることが必要である。また、配管15および流体には観測に必要な量の磁束が透過する必要があるため、強磁性体は好ましくない。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。
【0067】
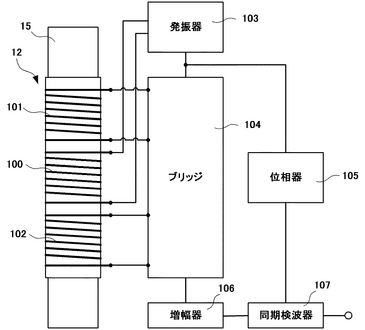
B.渦電流利用方式(2)
図14は、粒子センサ12の他の例を示したブロック図である。本例の粒子センサ12は、前記図13の場合と同様、粒子17に発生する渦電流を利用する。本例の粒子センサ12は、配管15に巻き付けるコイルとして、励磁用コイル100とセンサコイル101および102の3つのコイルを有し、発振器103、ブリッジ104、位相器105、増幅器106、同期検波器107を備える。発振器103によって励磁用コイル100を駆動し、励磁用の交流磁界を発生する。励磁用交流磁界は観測領域18にある粒子17に渦電流を発生させる。発生した渦電流は磁界を発生し、この渦電流による磁界はセンサコイル101および102によって検出される。本例では、励磁用コイル100を独立に設けているので、励磁電流を大きくして大きな渦電流を発生させることができ、センサの感度を向上することができる。また、センサコイル101および102はブリッジ104によってブリッジ回路を構成し、インピーダンス(インダクタンス)の変化を高感度に検出できる。さらに、発振器からの信号を、位相器105を介して同期検波器107に伝達し、同期検波器107において増幅器106により増幅したブリッジ回路の出力を同期検波するので、微少な出力を高感度に検出することが可能である。
【0068】
本例の粒子センサ12では、図13の場合と同様に、粒子17内に渦電流を発生することが要件となるため、粒子17には導電体または半導体が含まれることが必要である。また、配管15および流体には観測に必要な量の磁束が透過する必要があるため、強磁性体は好ましくない。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。
【0069】
C.ホール素子
図15は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、ホール素子110を有し、磁石112および113で生成した外部磁場114の変動をホール素子110によって検出する。ホール素子110は、増幅・制御装置111によって制御されその出力が増幅される。
【0070】
本例の場合、粒子17の透磁率が配管15内を流れる流体の透磁率と相違すれば、粒子17の存在により外部磁場114に影響を与え、これを検知できる。ただし、外部磁場114への影響を大きくするためには、粒子17の透磁率は大きいことが好ましい。また、外部磁場114が観測領域18に透過するためには、配管15は常磁性体であることが好ましい。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。なお、外部磁場114の変動が十分大きく、その検出感度が問題にならない場合には、ホール素子110に代えて、適当な磁場変動検出素子(たとえばインダクタンス素子)を用いることもできる。
【0071】
D.コンデンサ方式
図16は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、配管15を挟む一対の電極120および121からなるコンデンサを有し、このコンデンサに共振する電圧を印加する発振回路122および周波数カウンタ123を備える。観測領域18に存在する粒子17の誘電率が配管15内の流体の誘電率と相違するなら、粒子17の存在はコンデンサのキャパシタンスを変動させ、キャパシタンス変動は発振回路122から印加される発振周波数に影響する。よって、この発振周波数の変動を周波数カウンタ123で検知すれば、粒子17の存在が検知できる。なお、周波数変動の大きさは粒子17の数量と相関関係があるので、周波数変動の大きさによって粒子17の数量を計測できる。
【0072】
本例の場合、粒子17に必要とされる要件は、配管15内の流体の誘電率との相違である。コンデンサのキャパシタンスを大きく変動させるためには、誘電率の相違が大きいほど好ましい。また、観測領域18に電束が透過する必要があるから、配管15および流体は絶縁体である必要がある。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。なお、本例のコンデンサに図14に示すブリッジ回路を適用してキャパシタンスの変動をより高感度に検出するようにすることも勿論可能である。
【0073】
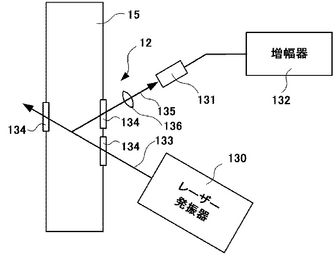
E.光学的方式
図17は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、レーザー発振器130、受光素子131、増幅器132を有し、レーザー発振器130で生成したレーザー光133を配管15に設けた光学窓134を透して観測領域18に照射する。観測領域18に粒子17が存在すれば、散乱光135を生じる。散乱光135は光学窓134を透して配管15の外部に取り出し、光学系136を介して受光素子131によって検知できる。散乱光強度は粒子17の量に正相関するため、受光素子131の出力(増幅器132の出力)によって粒子17の数量を計測できる。
【0074】
本例の場合、粒子17に必要とされる要件は、配管15内の流体との屈折率の相違である。さらに、流体は、レーザー光133を透過する必要がある。本例の粒子センサ12によれば、粒子17の屈折率を除く物性は特に問題とならない利点がある。また、配管15には光学窓134を設けるので、その材質に制限はない。なお、配管15自体がレーザー光133を透過するものであれば、光学窓134は必要ではない。
【0075】
なお、ここではレーザー光133の散乱光135を計測する例を示したが、レーザー光133の透過率を測定することも可能である。この場合、粒子17はレーザー光133の波長の光を吸収する物質である必要がある。なお、粒子17に当該波長の吸収帯がない場合であっても、レーザー光を用いれば、2光子吸収を利用して光透過率測定を行うことが可能な場合がある。また、光吸収を用いた測定の場合、光源はレーザーである必要はない、インコヒーレント光を用いて粒子17の光吸収を測定することも可能である。光吸収測定を行う場合、受光素子は光源に対向する位置に配置することは言うまでもない。
【0076】
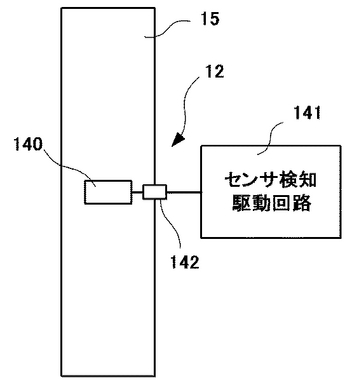
F.ガスセンサ
図18は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、配管15の内部にガスセンサ140を配置する構成である。ガスセンサ140は電流導入端子142を介してセンサ検知駆動回路141に接続される。本例の場合、配管15内の粒子17としてガスが存在する場合、粒子17を適切に計測できる。ガスセンサ140は、計測対象のガスによって適切に選択され、たとえば粒子17がホルムアルデヒド、トルエン、キシレン等の不飽和炭化水素系ガスの場合、たとえば熱線型半導体ガスセンサを例示できる。粒子17がたとえば一酸化炭素の場合には、定電位電解式ガスセンサが利用できる。
【0077】
3.具体的構成例の基本構成への適用
上記した粒子捕捉手段および粒子センサの具体的構成を適宜選択して上記した構成例1あるいは構成例2の粒子計量システムに適用することが可能である。ただし、粒子17、配管15および流体の物性によって、適用できない具体的構成が存在する。以下、その適用の可否について説明する。
【0078】
前記した粒子センサ12は、その基礎とする物理現象によって5つに分類することが可能である。すなわち、粒子17に発生する渦電流を利用して計測する方式(以下「Iw方式」とする)、粒子17の存在によって影響を受ける外部磁場の変動を計測する方式(以下「Mg方式」とする)、粒子17の存在によって影響を受けるキャパシタンス変動を計測する方式(以下「Cap方式」とする)、光学的方式(以下「Pho方式」とする)、ガスセンサを用いる方式(以下「Gas方式」とする)、である。
【0079】
Iw方式は、観測領域18に交流磁界が到達すること、粒子17に電流が流れることが要件となることから、粒子17は絶縁体であってはならず、配管15および流体は常磁性体であることが必要である。
【0080】
Mg方式は、外部磁界が観測領域18に到達すること、粒子17の存在によって外部磁界が影響を受けることが必要である。よって、Mg方式では、粒子17と流体は透磁率が相違する必要があり、配管15は常磁性体であることが必要である。流体が常磁性体である場合には、粒子17は透磁率が相違する限り常磁性体であっても構わないが、外部磁界への影響(信号)が強いほど好ましいため、粒子17は強磁性体(フェリ磁性またはフェロ磁性)であることが好ましい。
【0081】
Cap方式は、観測領域18に電束が到達すること、粒子17の存在によってキャパシタンスが変化することが必要である。よって、Cap方式では、配管15および流体は絶縁体である必要がある。また、粒子17と流体とは誘電率が相違する必要があるが誘電率の定義から粒子17は導電体であってはならない。
【0082】
Pho方式は、観測領域18に光が到達すること、粒子17の存在によって光が散乱(反射)または吸収されることが必要である。よって、Pho方式では、配管15および流体は光透過性でなくてはならず、粒子17と流体との屈折率が相違することまたは粒子17が光吸収率を有することが必要である。なお、配管15に光学窓を設ける場合には配管15の材質が問題になることはない。また、粒子17と流体との間には界面を有するため、屈折率が極めて高い精度で一致しない限り粒子17の屈折率が問題になることはない。よって、Pho方式では、流体に光透過性が要求される他は粒子17および配管15に大きな制約はない。
【0083】
Gas方式は、センサの感度が観測対象の粒子17(ガス)にあることが必要である。観測対象のガスに適合するガスセンサを選択する限り粒子17、配管15および流体に制限はない。
【0084】
前記した粒子捕捉手段についても、その基礎とする物理によって4つに分類することが可能である。すなわち、粒子を磁気的作用で捕捉する方式(以下「Mg方式」とする)、静電的作用で捕捉する方式(以下「Ele方式」とする)、物理的作用で捕捉する方式(以下「Me方式」とする)、吸着方式で捕捉する方式(以下「Ads方式」とする)、である。
【0085】
Mg方式は、粒子17まで磁界が到達する必要があり、粒子17が磁気的作用によって引力を受ける必要があるから、粒子17は強磁性体であり、配管15および流体は常磁性体である必要がある。
【0086】
Ele方式では、粒子17まで電界が到達し、粒子17に電荷が付与できる必要があるから、粒子17の電気的性質は問われないものの、配管15および流体は絶縁体である必要がある。
【0087】
Me方式では、粒子17が機械的に捕捉されれば足りる。よって、粒子17、配管15および流体の電気的磁気的性質に制限はない。一方Ads方式においても粒子17、配管15および流体の電気的磁気的性質に制限はない。ただし、粒子17はガスまたはこれに準じる程度に微細な粉粒体である必要がある。
【0088】
上記した各方式における粒子センサおよび粒子捕捉手段が、粒子17および配管15の物性によって適用可能か否かを纏めたのが図19に示す表図である。図19は、本実施の形態における粒子センサおよび粒子捕捉手段の各具体的手段が粒子17および配管15の物性によって適用可能か否かを纏めた表図である。なお、同表図において、流体は絶縁体かつ常磁性体とした。流体が磁性流体の場合あるいは導電体(電解質)の場合であっても、前記した粒子センサおよび粒子捕捉手段の具体的構成が適用可能な場合があることは勿論である。しかし、多くの場合、流体として水あるいはオイルのように絶縁体かつ常磁性体が適用されるであろうから、これらの場合を想定して当該表図を作成したものである。
【0089】
同図において、「○」は適用可、「×」は適用不可、「△」は適用可能ではあるが他の手段の選択が好ましいもの、を示す。同図に示すように、粒子17および配管15の何れの組合せにおいても、粒子センサおよび粒子捕捉手段として前記した何れかの方式の具体的構成を選択することによって、構成例1あるいは構成例2の粒子計量システムが実現できる。
【0090】
本実施の形態の粒子計量システムによれば、極めて密度の小さい粒子17を高精度に計測することが可能である。これは、第1粒子捕捉手段11によって粒子17を捕捉し予めその密度を高めた後に粒子センサ12で計測することによって実現される。なお、ここで粒子センサ12としてベースライン変動が無視できないような高感度センサを用いたとしても、粒子捕捉手段11によって粒子17を捕捉する限りその状態では粒子17はセンサの観測領域18に存在しない、あるいは存在したとしてもごく微量であるため、粒子センサ12のキャリブレーションを実施することが可能である。
【0091】
本実施の形態の特に構成例2の粒子計量システムによれば、前記した効果に加えて、粒子センサ12のキャリブレーションを確実に行うことが可能になる効果がある。つまり、センサのキャリブレーションの際には、粒子17の捕捉および解放操作に伴うノイズの混入を回避するために、第1粒子捕捉手段11での粒子解放操作を行った後にキャリブレーションを実行する必要がある。ここで、粒子17が観測領域18に到達するまでにキャリブレーションを完了できれば良いがそうでない場合、キャリブレーションの確度が低下する恐れがある(キャリブレーションの途中で有る程度の粒子が観測領域に到達してしまう)。キャリブレーションの確度を高めようとすれば第1粒子捕捉手段11と粒子センサ12とを十分離して配置する必要があるがあまりに離しすぎると第1粒子捕捉手段11で濃縮した粒子17が観測領域18に到達するまでに拡散して粒子濃縮の効果が低下してしまう。そこで、構成例2では第2粒子捕捉手段28を設けて粒子17が拡散したとしても再度これを濃縮する手段を備えたものである。この結果、第1粒子捕捉手段11と粒子センサ12との間の距離を十分に長くしてキャリブレーションのための時間を確保することが可能になる。
【0092】
また、構成例2の粒子計量システムでは、粒子17が拡散したとしても、第2粒子捕捉手段28によって観測領域18に粒子17を再度集めるので、拡散の影響を排除できる。これは流体の流速によって観測結果が影響されず、安定した測定が可能であることを意味する。
【0093】
図20は、本実施の形態の粒子計量システムによって実際に粒子計量を行った結果を示すグラフである。図20において縦軸はセンサ出力(任意スケール)、横軸は時間(任意スケール)である。ライン150は、構成例2の粒子計量システムによる実験結果であり、ライン151は構成例1の粒子計量システムによる実験結果である。なお、粒子センサ12としては前記したB.渦電流利用方式(2)の具体的構成を適用し、粒子捕捉手段としては前記したB.ソレノイド式磁石の具体的構成を適用した。配管15はビニール配管を、流体としてエンジンオイルを、粒子17としては鉄粉を用いた。エンジンオイル内の鉄粉濃度は50ppmとした。また、第1粒子捕捉手段11での捕捉時間は10分である。時刻t1で第1粒子捕捉手段11での粒子解放操作を行う(構成例2の場合同時に第2粒子捕捉手段28の捕捉を開始する)。ライン152はベースラインの変動を示す。
【0094】
図示するように、ライン150(構成例2の場合)の信号レベル(矢印153で示す幅)は、ライン151(構成例1の場合)の信号レベル(矢印154で示す幅)より格段に大きい。すなわち、構成例2では大きな信号レベルが得られる。ライン151でも勿論測定は可能であるが、ベースライン変動が大きくなれば信号がベースライン変動に埋もれてしまう可能性もある。より安定な測定のためには信号レベルの大きい構成例2が好ましいことがわかる。
【0095】
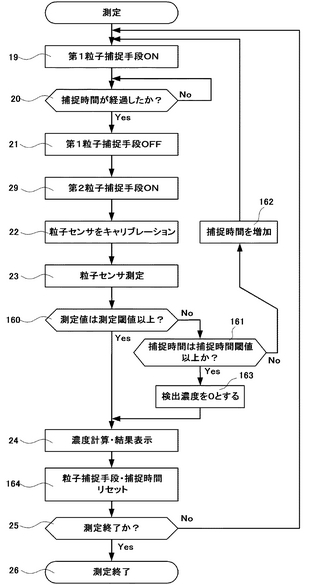
以上、本発明を具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。たとえば、前記実施の形態における粒子計量システムの測定方法を図21に示すように変更することも可能である。すなわち、粒子センサによる測定(ステップ23)の後、測定値が閾値(測定閾値)以上であるかを判断する(ステップ160)。測定値が測定閾値以上であると判断した場合には図6(図3)の場合と同様に濃度計算を行ってさらに結果を表示する(ステップ24)。しかし測定値が測定閾値以上でないと判断した場合には、捕捉時間が閾値(捕捉時間閾値)以上であるかを判断し(ステップ161)、捕捉時間が捕捉時間閾値を越えていないと判断した場合には捕捉時間を増加して(ステップ162)測定を繰り返す。一方、捕捉時間が捕捉時間閾値以上である場合には粒子が検出できないと判断して検出濃度を0とする(ステップ163)。このような方法により、捕捉時間を最適化することが可能になる。
【0096】
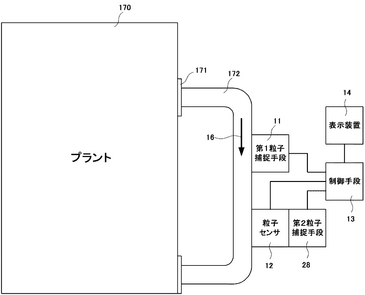
また、上記した実施の形態の粒子計量システムは、図22に示すようなプラント170の劣化検査に応用することができる。すなわち、プラント170にフランジ171で接続されている配管172に上記した粒子計量システムを配置する。なお、同図では構成例2の場合を例示しているが構成例1の粒子計量システムでもよいことは言うまでもない。
【0097】
プラント170内の反応槽あるいは配管には通常流体が常時還流し、プラント内の反応によってあるいは還流する流体自体によってその反応槽や配管の内部が研削される。これら研削物は粒子として還流液体内に存在することになる。この研削された粒子濃度をモニタすることによってプラントの劣化状態をモニタすることができる。原子力発電等のプラントにおいては冷却水等が高温高圧状態で長期間還流されており、その使用状態が過酷であって配管等の部材に係る負荷が大きいにも関わらずその安全性が重視されなければならない。これらプラントの劣化モニタとして本粒子計量システムを適用すれば、ごく微量の研削粒子が高感度に検出できるので早い段階での劣化検出が可能になる。また、粒子捕捉手段および粒子センサを適切に選択すれば、粒子密度を配管の外部から非接触で計量できるため、劣化モニタのためのプラントの改造等を行う必要がない。プラントの稼動状況に関わらず劣化モニタとして適用できるため、連続運転を前提とするようなプラントに適用して大きな効果が得られる。
【産業上の利用可能性】
【0098】
本願発明は、流体内に存在する低濃度の粒子を検出するシステムおよび方法に関する発明であり、工業計測全般およびプラントやエンジンの劣化モニタの分野に適用することが可能な発明である。
【図面の簡単な説明】
【0099】
【図1】本発明の一実施の形態である粒子計量システムについてその基本的構成の一例である第1構成例を示したブロック図である。
【図2】構成例1の粒子計量システム10の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放され、粒子センサ12の観測領域18まで移動してきた状態を示す。
【図3】構成例1の粒子計量システム10の測定方法の一例を示したフローチャートである。
【図4】本発明の一実施の形態である粒子計量システムについてその基本的構成の他の例である第2構成例を示したブロック図である。
【図5】構成例2の粒子計量システム27の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放され、粒子センサ12の観測領域18まで移動してきた状態を示す。
【図6】構成例2の粒子計量システム27の測定方法の一例を示したフローチャートである。
【図7】粒子捕捉手段の具体的構成を電磁石として構成した場合の一例を示したブロック図である。
【図8】粒子捕捉手段の具体的構成をソレノイド式磁石として構成した場合の一例を示したブロック図である。
【図9】粒子捕捉手段の具体的構成をモータ駆動式磁石として構成した場合の一例を示したブロック図である。
【図10】粒子捕捉手段の具体的構成を荷電集塵方式手段として構成した場合の一例を示したブロック図である。
【図11】粒子捕捉手段の具体的構成をメッシュ(網)として構成した場合の一例を示したブロック図である。
【図12】粒子捕捉手段の具体的構成を吸着材として構成した場合の一例を示したブロック図である。
【図13】粒子センサ12の一例を示したブロック図である。
【図14】粒子センサ12の他の例を示したブロック図である。
【図15】粒子センサ12のさらに他の例を示したブロック図である。
【図16】粒子センサ12のさらに他の例を示したブロック図である。
【図17】粒子センサ12のさらに他の例を示したブロック図である。
【図18】粒子センサ12のさらに他の例を示したブロック図である。
【図19】本実施の形態における粒子センサおよび粒子捕捉手段の各具体的手段が粒子17および配管15の物性によって適用可能か否かを纏めた表図である。
【図20】本発明の一実施の形態である粒子計量システムによって実際に粒子計量を行った結果を示すグラフである。
【図21】粒子計量システムの測定方法の他の例を示したフローチャートである。
【図22】粒子計量システムをプラントに適用した場合の一例を示すブロック図である。
【符号の説明】
【0100】
10…粒子計量システム、11…第1粒子捕捉手段、12…粒子センサ、13…制御手段、14…表示装置、15…配管、17…粒子、18…観測領域、27…粒子計量システム、28…第2粒子捕捉手段、31…磁心、32…コイル、33…電源制御回路、41…ソレノイド、42…駆動用鉄心、43…永久磁石、44…電源制御回路、50…モータ、51…クランク、52…永久磁石、53…モータ制御回路、61…プローブ、62…第1電極、63…第2電極、64…高圧電源、65…制御電源、66…制御回路、67…電流導入端子、70…メッシュ、71…回転導入端子、80…吸着材、81…ヒータ、82…ヒータ電源、83…制御回路、90…コイル、91…発振回路、92…周波数カウンタ、100…励磁用コイル、101,102…センサコイル、103…発振器、104…ブリッジ、105…位相器、106…増幅器、107…同期検波器、110…ホール素子、111…増幅・制御装置、112,113…磁石、114…外部磁場、120,121…電極、122…発振回路、123…周波数カウンタ、130…レーザー発振器、131…受光素子、132…増幅器、133…レーザー光、134…光学窓、135…散乱光、136…光学系、140…ガスセンサ、141…センサ検知駆動回路、142…電流導入端子、170…プラント、171…フランジ、172…配管。
【技術分野】
【0001】
本発明は、流体(気体または液体)内に存在する粒子の数量を計量する技術に関する。特に、流体内の粒子濃度が極めて低い超低濃度状態の粒子計量に適用して好適なものである。また、これら粒子計量技術を応用してプラント等における配管や反応槽の劣化状態をモニタするモニタリング技術に関する。
【背景技術】
【0002】
液体内の粒子量を計量したい要請は多岐に渡る。たとえば、内燃機関におけるエンジンオイル内にはピストンとピストンリングとの摩擦によって発生する金属粉が混入する。この金属粉の量はエンジンの劣化状態を示す指標として利用できるし、また、エンジンオイルの交換時期を示す指標にもなる。このようなエンジンオイル内の金属粉量を計測できれば、エンジンの過度な劣化を防止し、適正なオイル交換時期を知ることができる。
【0003】
また、たとえば原子炉等のプラントにおいて、その劣化状態を知ることは極めて重要である。プラントにおける劣化モードは多数存在し、一概にその劣化度合いを論ずることはできないが、たとえば長期間の使用により配管の肉厚が減少するような劣化の場合には、削れた配管材料が冷却水等配管内を流れる流体内に混在しているはずであり、この流体内の研削物の量をモニタできればプラントの劣化状態を知ることができる。
【0004】
しかし、これら流体内の粒子量をモニタすることは容易ではない。これら流体内の粒子は、正常稼動状態においては理想的には存在しない異物であり、存在したとしても極めて微量なものだからである。また、内燃機関、プラント等に異常を来たした後に粒子(異物)を検知したとしてもその目的を達することはできないので、正常稼動状態における異物量がごく僅か増加したことを検知する必要がある。本来微量である異物のごく僅かな増加を検知する必要があることからその困難性は極めて高いことは容易に推察できるであろう。
【0005】
微量な異物検出の可否は、検出装置(センサ)の感度に依存する。微量検出の要請からセンサには高い感度が要求される。ところが、センサ感度を向上すると、一般的にセンサのドリフトが問題になり、また、ノイズ耐性が低下する問題がある。たとえば、特許文献1に記載のような、励磁電流によって電磁石化される検出用コイルヘッドと検出用コイルヘッドに励磁電流を供給する発振同調回路とを備え、検出用コイルヘッドをエンジンオイル中の金属粉を吸着するよう構成し、発振同調回路によって吸着金属粉の量に応じた検出用コイルヘッドのインダクタンス値を計測する方式のオイルチェックセンサにおいては、やはりセンサベースラインの変動(ドリフト)が問題となり、高精度な異物(粒子)濃度の検出は困難である。
【特許文献1】特開2000−321248
【0006】
上記のような問題に鑑み、本発明者らのグループは、低濃度異物(金属粉)の検出が可能な異物検出システムの発明(以下「先行発明」という)を為し、本願と同一の出願人によって特願2004−41766号として特定される特許出願(以下「先行出願」という)をした。上記先行発明は、異物を一定時間捕捉してその領域における異物濃度を高め、その捕捉を解放した時点での異物濃度を計測することによって低濃度異物の検知を行おうとするものである。ここで先行発明では、異物捕捉手段とセンサとを位置的に分離し、異物捕捉手段によって異物を捕捉している段階ではセンサの観測領域には異物は存在しないようにする。よって、センサはその観測直前にキャリブレーションを行うことが可能になり、ベースラインの変動(ドリフト)の影響を取り除くことができる。このような先行発明により、本来低濃度な異物であっても異物捕捉手段によって濃度を高めることができ、かつ、測定直前のキャリブレーションによってベースライン変動の影響を取り除くことが可能となり、極めて低濃度な異物を高精度に測定することができるようになる。
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところが、先行発明には、さらなる改善の余地があることを本発明者らは認識した。すなわち、先行発明においては、センサで異物検出を行う前に異物捕捉手段によって異物濃度を高め、かつ、センサのキャリブレーションを行うが故に高精度な異物検出が可能になる。ここで注意を要するのは、センサのキャリブレーションは、異物捕捉手段による異物の解放が行われた後に実行する必要があることである。つまり、キャリブレーションと測定との間に異物の解放操作が介在すると、その解放操作に起因するノイズが発生し、センサ出力にノイズの影響が混入してしまうためである。従って、異物解放の後にキャリブレーションを実行しようとすると、キャリブレーションの時点ではセンサの観測領域に異物があってはいけないあるいは極めて少ない必要があることから、異物捕捉手段をセンサ観測領域から十分離れた位置に配置する必要がある。
【0008】
しかしながら、異物捕捉手段をセンサの観測領域からキャリブレーションに必要な時間を確保するに十分な距離だけ離して設置すると、折角集めた異物がセンサ観測領域に移動するまでの間に拡散してしまい、濃度を高めた効果が減殺されてしまう。つまり、異物濃度を高めた効果を得ようとすれば、センサ観測領域を異物捕捉領域にできる限り近づける必要があるが、そうするとキャリブレーションの確度が低下してしまう(ある程度の異物が観測領域に到達してしまう)。すなわち、異物の高濃度化とキャリブレーションの確度とはトレードオフの関係にある問題がある。
【0009】
上記のような問題があっても、先行出願に係る先行発明がキャリブレーションの確度の範囲内で粒子計量に供することが可能なことはもとよりである。しかし、先行発明の構成では、捕捉により濃縮した粒子の計量は、観測領域に到達した段階での粒子濃度を反映して測定することになるから、測定値は、捕捉粒子の解放から観測領域に到達するまでの間に拡散した度合いを大きく反映することになる。つまり、拡散の度合いは、粒子解放から観測領域に到達するまでの時間に依存し、観測領域に粒子(群)が到達するまでの時間は粒子が存在する流体の流速に依存する。つまり、先行発明では、粒子が存在する流体の流速が変化すると出力値が大きく変動する問題がある。
【0010】
本発明の目的は、異物捕捉手段で捕捉した異物の高濃度化の効果を減殺することなく、正確なキャリブレーションを行うに十分な時間を確保できるセンサ配置位置を実現できる先行発明類似の粒子計量手法を提供することにある。また、粒子が存在する流体の流速に依存しない出力値を得ることができる先行発明類似の粒子計量手法を提供することにある。本発明の他の目的は、先行発明では、異物として磁性体を前提としていたところ、これをあらゆる材料からなる粒子に適用可能とする技術を提供することにある。本発明のさらに他の目的は、本明細書で提示する粒子計量についての技術をプラント等の劣化検知に適用し、極めて早い段階で劣化を高精度に検知できるシステムおよび方法を提供することにある。
【課題を解決するための手段】
【0011】
本明細書で開示する発明は、以下の通りである。すなわち、本発明の粒子計量システムは、所定方向への流れを有する液体または気体内に存在する粒子の数または量を非接触で測定する粒子計量システムであって、前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置され、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する。このような粒子計量システムによれば、第1の粒子捕捉手段で粒子濃度を高め、流れの下流に位置する粒子センサによって粒子の数量を計量できる。言葉を変えて言えば、第1の粒子捕捉手段によって粒子濃度を高めることは、一定時間の粒子の捕捉によって実現できるのであるから、測定にかかる時間を長くして測定の感度を高めていることに相当する。つまり、本発明が基礎とする測定手法は、時間の次元を粒子数(粒子密度)の次元に変換する次元変換の概念を利用し、いわば時間積分によって測定感度を向上するようにしているといえる。従って、本発明によれば、極めて濃度の低い粒子の濃度測定を正確に行うことが可能になる。
【0012】
なお、ここで、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有することができる。第2の粒子捕捉手段を備えることにより、第1の粒子捕捉手段で高濃度化した粒子が粒子センサの観測領域に到達するまでの間に拡散しても再度観測領域において粒子の濃度を高めることができる。この結果、粒子センサを第1の粒子捕捉手段から十分に離して配置することが可能になり、粒子センサのキャリブレーションを安定かつ正確に行うことができる。つまり、本願発明を別の観点から捉えると、前記第1の粒子捕捉手段が前記粒子を解放した後に、解放された前記粒子が前記観測領域に到達するまでの時間が、前記粒子センサをキャリブレーションするに必要な時間以上であるよう前記粒子センサを前記第1の粒子捕捉手段から離して配置する粒子計量システムとすることができる。なお、本明細書において「キャリブレーション」は、センサ出力が0である(センサの観測領域に粒子が存在しない)と推定できるときの出力を「0」として出力補正(ゼロ点校正)を行うことを意味する。ゼロ点校正の方法には各種の手法が存在し、たとえば、キャリブレーション実行時のセンサ出力が「0」になるよう出力回路にバイアスを付加する方法や、キャリブレーション実行時のセンサ出力を記録しておき、後の測定時におけるセンサ出力に先に記録したキャリブレーション時の出力値を補正値として付加する方法を採用できる。粒子センサのキャリブレーションや出力測定に際して、適当な積分回路(ローパスフィルタ)を介した測定や、複数サンプルの取得および演算による平均値の採用により、高い周波数のノイズを除去し、測定値の精度を高めるようにすることができるのは言うまでもない。
【0013】
上記発明において、粒子の捕捉手段としては、以下のようなものを適用できる。すなわち、粒子に磁性体を含む場合には、永久磁石、電磁石等の磁力を利用できる。あるいは、粒子が誘電体、導電体あるいは半導体であって、それが存在する流体が絶縁体である場合には、適当な電荷付与手段を設けて粒子に電荷を付与し、静電力を利用できる。あるいは、流れを構成する物質(流体)を透過し粒子の透過を阻害する濾過手段を捕捉手段として利用できる。この場合、捕捉した粒子の解放は、濾過手段の流れに対する方向を反転することにより行うことができる。あるいは、粒子がガス等の気体である場合には、粒子を選択的に吸着する吸着材を捕捉手段として利用でき、捕捉した粒子の解放は吸着材を加熱することにより行うことができる。
【0014】
また、上記発明において、粒子センサとしては、以下のようなものが適用できる。すなわち、粒子が導電体または半導体の場合には、粒子センサに誘導素子を適用し、誘導素子または励磁用誘導素子によって発生させた外部交流磁界による導電体または半導体内部の渦電流に起因する前記誘導素子のインダクタンス変化によって、粒子の数または量を計測できる。あるいは、粒子が磁性体である場合には、粒子センサに磁界を発生する磁界発生手段を備え、センサとしてホール素子を適用し、ホール素子が検知する磁界の変動によって、粒子の数または量を計測できる。あるいは、粒子が誘電体である場合には、粒子センサとして容量素子を適用し、容量素子のキャパシタンスの変化によって、粒子の数または量を計測できる。あるいは、粒子センサにレーザー光発生手段および散乱光測定手段を備え、レーザー光が粒子によって散乱された散乱光の強度によって、粒子の数または量を計測することができる。あるいは、粒子がガス状分子である場合、粒子センサとしてガス状分子の数または濃度を計測するガスセンサを適用できる。
【0015】
以上のとおり、本願発明の粒子計量システムにおいては、各種の粒子捕捉手段および粒子センサを適用することが可能である。しかし、これら捕捉手段およびセンサは、粒子の種類や、流体の容器・配管の材料によってその有効性や適用の可否が相違する。たとえば、常磁性体材料の粒子や磁性体材料の容器・配管には磁気的作用を利用した粒子捕捉手段は適用できないし、導電体材料の容器・配管には静電的作用を利用した粒子捕捉手段は適用できない。また、絶縁体材料の粒子には渦電流を利用した誘導素子によるセンサは適用できない。その他、粒子の捕捉やセンシングの基礎とする物理現象によってそれら捕捉やセンシングが特定の粒子あるいは容器・配管材料で使用できたりできなかったりすることは当業者に容易に理解できるであろう。しかしながら、上記した粒子捕捉手段および粒子センサが、その基礎とする物理現象に即して、特定の粒子材料および容器・配管材料において使用できる限り、これら捕捉手段およびセンサを任意に組合せ、本願の粒子計量システムに適用可能なことは言うまでもない。上記した粒子捕捉手段あるいは粒子センサは単独で用いることも可能であるし、複数の粒子捕捉手段あるいは複数の粒子センサとして組み合わせて適用することも可能である。なお、磁気的、静電的、光学的な捕捉・センシング手法を適用する場合には、粒子および粒子が存在する流体に非接触で粒子の計量が行える。
【0016】
上記した粒子計量システムにおいては、以下のような粒子計量方法を適用できる。すなわち、本願の他の発明である粒子計量方法は、所定方向への流れを有する液体または気体内に存在する粒子の数または量を測定し、前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置されその観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する粒子計量システムを用いた粒子計量方法であって、前記第1の粒子捕捉手段により、所定の捕捉時間の間前記粒子を捕捉するステップと、捕捉された前記粒子を解放するステップと、前記粒子の解放の後に、前記粒子センサのキャリブレーションを実行するステップと、前記粒子センサによる測定を開始するステップと、を有する。このような粒子計量方法によれば、粒子を所定の捕捉時間だけ捕捉するため、粒子濃度を高めることが可能になり、粒子の解放後に粒子センサのキャリブレーションを行って粒子の計量を開始するので、粒子解放に伴うノイズの発生を避けると共にセンサのベースライン変動の影響を排除することができる。本発明の構成においては、前記した時間の次元を粒子数(粒子密度)の次元に変換する次元変換の概念が端的に現れる。すなわち時間次元における測定時間(捕捉時間)を長くすることによって観測粒子数(粒子密度という空間的距離の次元)を高め、粒子計量システム全体の感度向上を図るという効果に繋げている。
【0017】
ここで、前記粒子計量システムには、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段を含み、前記第1の粒子捕捉手段による前記粒子の捕捉中または捕捉された前記粒子の解放後であって前記粒子センサのキャリブレーション前に、前記第2の粒子捕捉手段による前記粒子の捕捉を開始するステップを有することができる。このような第2の粒子捕捉手段によって粒子センサの観測領域に粒子を捕捉するようにするため、第1の粒子捕捉手段で濃縮した粒子がその解放によって拡散を開始したとしても、粒子センサの観測領域で再度濃縮されるため、粒子センサの出力を高めることができる。本発明では、第2の粒子捕捉手段の捕捉の開始を粒子センサのキャリブレーション前に行うため、第2の粒子捕捉手段の捕捉操作に伴うノイズの影響を受けることがない。
【0018】
上記粒子捕捉方法において、前記粒子センサの出力値が所定の閾値以上である場合には、前記出力値または前記出力値から計算された値を表示するステップと、前記粒子センサの出力値が前記所定の閾値未満である場合には、前記捕捉時間をより長く変更し、前記第1の粒子捕捉手段による前記粒子の捕捉からの一連の前記ステップを繰り返すステップと、を有することができる。このような構成を有することにより、粒子計量システムの感度が不足する場合には、時間次元における捕捉時間を長くして粒子計量システムの感度を高めることができる。なお、前記捕捉時間が所定の閾値以上である場合、前記粒子を検出できないと判断することができる。現実的な測定時間内に測定できない場合は本粒子計量システムの測定限界を超えたと判断するものである。
【0019】
上記した粒子計量システムおよび粒子計量方法は、これをプラントの劣化検知に適用することができる。プラントを構成する配管あるいは反応槽では、その内部にたとえば反応液あるいは冷却液が循環している。これら反応液や冷却液によって配管や反応槽の内壁が削られ劣化する場合があることは一般に知られている。このような循環液によって研削された研削滓は、これを積極的に取り除かない限り、循環液内に拡散され、循環液とともに配管内を循環することになる。本願のプラント劣化検知システムおよび方法は、このように配管内を循環している研削滓を粒子と捉え、研削滓(粒子)の数量の上昇がプラントの劣化度合いを反映しているとの認識を基礎として、上記した粒子計量システムおよび粒子計量方法を適用し、プラントの劣化検知に応用しようとするものである。
【0020】
その具体的な構成は、以下の通りである。すなわち、本願発明のプラント劣化検知システムは、その内部に流体が流れる配管を有するプラントにおける前記配管または前記プラントの反応槽の劣化を検知するプラント劣化検知システムであって、前記配管の外部に配置され、前記流体の流れに抗して前記配管または前記プラントの反応槽を構成する材料または前記材料の化合物からなる粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置であって前記配管の外部に配置される、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する。なお、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有することができる。
【0021】
上記プラント劣化検知システムで適用できる粒子捕捉手段および粒子センサは、上記した粒子計量システムの場合と同様である。また、プラント劣化検知システムに適用できるプラント劣化検知方法についても、上記した粒子計量方法と同様である。ただし、プラント劣化検知方法においては、粒子濃度が所定の閾値以上であるか否かを判断すれば足りる。
【0022】
本願発明で利用する粒子検知手法は極めて低い濃度の粒子を正確に検知することが可能であるため、早い段階でのプラントの劣化を検知することが可能となる。しかも、粒子捕捉手段および粒子センサを適切に選択すれば、粒子検出を非接触で行うことが可能になるため、既に設置されているプラントに、大幅な改造を加えることなくこれを適用できる。また、プラントの設計においても大きな負担を強いることなく、本発明の劣化検知手法を適用することができる。
【発明の効果】
【0023】
本願発明によれば、粒子捕捉手段で捕捉した粒子の高濃度化の効果を減殺することなく、粒子センサの正確なキャリブレーションを行うに十分な時間を確保できるセンサ配置位置を実現できる。また、流速に依存しない出力値を得ることが可能になる。また、あらゆる材料からなる粒子に適用可能な粒子計量手法を提供できる。さらに、極めて早い段階でプラントの劣化を高精度に検知できるプラント劣化検知システムおよび方法を提供できる。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。まず、本発明の一実施の形態である粒子計量システムについて2例の基本構成を例示し、さらにその2例の基本構成における各構成要素に適用可能な具体的要素を例示する。その後、各具体的要素の基本構成への適用可能性について説明し、ある具体的な構成における粒子計量システムの実際の動作結果について説明する。最後に本粒子計量システムのプラント劣化検知システムへの応用について説明し、各種変更例に言及する。なお、以下説明する図面において、同一の機能を有する部材については同一の符号を使用し、重複した説明は省略するものとする。
【0025】
1.粒子計量システムの基本構成
1.1 第1構成例
図1は、本発明の一実施の形態である粒子計量システムについてその基本的構成の一例である第1構成例を示したブロック図である。本第1構成例は、粒子計量システムに粒子捕捉手段を1つ設ける例である。本第1構成例の粒子計量システム10は、第1粒子捕捉手段11、粒子センサ12、制御手段13および表示装置14を有する。
【0026】
第1粒子捕捉手段11は、配管15の近傍または内部に配置され、制御手段13の制御によって、配管15内を矢印16の方向に流れる流体内に存在する粒子17を捕捉する機能を持つ。また、捕捉した粒子17を制御手段13の制御によって解放する機能を有する。これら機能を実現する手法としては各種の手法がある。たとえば、粒子17が磁性体である場合には外部磁場を粒子17に及ぼして磁気的作用により粒子17を捕捉できる。あるいは、粒子17に電荷を付与できる場合には、クーロン力を利用して静電吸着することができる。あるいは、機械的、物理的作用により粒子17を捕捉あるいは吸着することができる。第1粒子捕捉手段11の具体的な構成については後に説明する。なお、図1では、第1粒子捕捉手段11は、配管15の外側に配置されているように図示してあるが、第1粒子捕捉手段11の具体的構成によっては配管15の内部にその一部または全部が配置される場合もある。
【0027】
粒子センサ12は、配管15の近傍または内部に配置され、観測領域18内にある粒子17の数量を検知する機能を有する。また、粒子センサ12は、制御手段13によって制御され、制御手段13からの制御によりキャリブレーションおよび粒子検知を実行する。粒子17の検知手法としては各種の手法がある。たとえば、粒子17が導電体あるいは半導体である場合、外部交流磁場の作用によって粒子17内に渦電流を発生させ、この渦電流に起因する検知コイルのインダクタンスの変化を計測して粒子17を検知できる。あるいは、粒子17が高透磁率材料である場合、外部磁場の変動を計測して粒子17を検知できる。あるいは、粒子17が高誘電率材料である場合、検知コンデンサのキャパシタンス変化を計測して粒子17を検知できる。あるいは粒子17が光を反射または吸収する材料である場合には、散乱光あるいは透過光を計測して粒子17を検知できる。あるいは、粒子17がガスである場合には、ガス吸着によって抵抗率等が変化する物理現象を利用したガスセンサを用いて粒子17を検知できる。粒子センサ12の具体的な構成については後に説明する。なお、図1では、粒子センサ12は、配管15の外側に配置されているように図示してあるが、粒子センサ12の具体的構成によっては配管15の内部にその一部または全部が配置される場合もある。
【0028】
制御手段13は、第1粒子捕捉手段11、粒子センサ12および表示装置14を制御する。制御手段13の具体的な機能および構成は、第1粒子捕捉手段11および粒子センサ12や表示装置14の具体的構成によって相違するものの、基本的には、第1粒子捕捉手段11に制御信号を発生し、粒子センサ12から出力信号を受け、受信した出力信号をそのままあるいは濃度換算のための必要な演算を実行した後に表示装置14に送信する。また、制御手段13は必要なタイミングで粒子センサ12のキャリブレーションを実行する。さらに制御手段13は、必要に応じて第1粒子捕捉手段11および粒子センサ12に電源を供給する。従って、制御手段13には、第1粒子捕捉手段11への制御信号を生成する信号生成部、粒子センサ12からの出力信号を受信するセンサ信号受信部、表示装置14への信号を生成する表示信号生成部、これらを制御する制御論理部、必要に応じて、濃度計算等の演算を行う演算部、電源を供給する電源供給制御部を有する。制御手段13の具体例としては、後に説明する計量シーケンスを実行できる電子回路ないし論理回路、コンピュータのようなプログラム演算機能を有する情報処理装置を例示できる。
【0029】
表示装置14は、制御手段13からの表示信号を受けて計量結果を表示出力する手段である。具体的には、CRTモニタ、液晶表示装置等の画像表示装置を例示できる。ただし、計量結果を表示できる限り、画像、文字等による表示には限られない。たとえば、音声によって計量結果を読み上げることが可能であるし、また、計量結果がある閾値を越えたことをビープ音によって報知することも可能である。
【0030】
配管15は本粒子計量システム自体を構成するものではないが、その材料物性によっては、前記した第1粒子捕捉手段11または粒子センサ12が依拠する物理現象を効果的に発生させることができない場合がある。そのため、配管15の材料選択は、本粒子計量システムを意図したとおりに動作させる必要上重要である。ただし、第1粒子捕捉手段11および粒子センサ12の具体的構成を適切に選択することにより、本粒子計量システム10は、あらゆる材料の配管15に適用可能である。何れの配管材料が第1粒子捕捉手段11あるいは粒子センサ12のどのような具体的構成において有効あるいは無効であるかは後に説明する。配管15の計測に及ぼす物性的側面を除けば、その材料や形状は特に限定されない。たとえばステンレス配管、鉄(鋼)配管、塩化ビニルその他各種のプラスチック配管等を例示できる。
【0031】
粒子17は、本粒子計量システム10の計量対象であり、前記のとおり、第1粒子捕捉手段11および粒子センサ12が依拠する物理現象によってその材料物性に制限を受ける。ただし、第1粒子捕捉手段11および粒子センサ12の具体的構成を適切に選択することにより、本粒子計量システム10は、あらゆる材料の粒子17の計測に対応可能となる点は配管15の場合と同様である。何れの粒子材料が第1粒子捕捉手段11あるいは粒子センサ12のどのような具体的構成において有効あるいは無効であるかは後に説明する。本粒子計量システムでは、配管15自体や配管15が接続されている内燃機関やプラント等内で機械的磨耗や内部を流れる流体との摩擦により生成される金属粉等の粉体や粒体を想定する。しかし、本発明における粒子17は粉体や粒体に限られるのもではなく、一般的なガス等の単分子状態、希ガス等の原子状態、さらに、複数分子が凝集したクラスタ状態の物質体を含む概念である。流体内に分散されあるいは均一化されて存在できる物質である限り、本発明の粒子17の概念に含まれるものとする。
【0032】
配管15を流れる流体は、動作状態において液体または気体状態の流動物質である。尤も流体にもいくつかの制約がある。たとえば、磁気的作用を利用して粒子17を捕捉あるいは検出する場合には、流体は非磁性(常磁性体)である必要がある。また、粒子17に電荷を付与して静電気作用により粒子17を捕捉する場合には流体は絶縁体である必要があり、かつ、粒子17を構成する物質よりもイオン化エネルギーが大きいことが必要である。ただし、第1粒子捕捉手段11および粒子センサ12の具体的構成を適切に選択することにより、本粒子計量システム10は、あらゆる材料の流体に対応可能となる点は配管15、粒子17の場合と同様である。具体的な流体として、水、オイル、空気等の絶縁体(誘電体)かつ非磁性体(常磁性体)を例示できる。実用的には、磁気流体(磁性体)や電解質溶液(導電体)が用いられることはあまりないので、本粒子計量システムに適用する流体として水、オイル等の絶縁体かつ非磁性体を想定すれば十分であると考えられる。尤も、水内に塩等のイオン性物質(不純物)が混入した場合には静電的手法による粒子捕捉に問題を生じる可能性がある。
【0033】
図2は、構成例1の粒子計量システム10の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放され、粒子センサ12の観測領域18まで移動してきた状態を示す。なお図2において、粒子計量システム10の一部は省略している。
【0034】
同図(a)において、第1粒子捕捉手段11はON状態すなわち粒子17を捕捉する状態にある。配管15内を矢印16の方向に流れている流体内には粒子17が存在し、粒子17は、第1粒子捕捉手段11の近傍に到達すると図示するように第1粒子捕捉手段11の周辺に捕捉される。粒子17が捕捉状態にあるとき、流れの下流側に配置されている粒子センサ12の観測領域18には粒子17は到達しないか到達したとしてもごくわずかである。
【0035】
ある程度の量の粒子17が第1粒子捕捉手段11に捕捉された後に、第1粒子捕捉手段11をOFF状態すなわち粒子17を解放する状態にする。同図(b)に示すように粒子17は第1粒子捕捉手段11からの束縛を離れ、流れに従って流体内を拡散しつつ粒子センサ12の観測領域18に到達する。観測領域18に存在する粒子17は、その数量に応じた出力信号を粒子センサ12に出力させる。ここで、粒子17は、同図(a)に示したように第1粒子捕捉手段11によってある程度濃度が高められているので、通常流体内に存在する濃度よりも高い濃度で観測領域18に到達する。よって、粒子センサ12の検出感度を高めなくても、システム全体の粒子検出感度を高めることができる。
【0036】
図3は、構成例1の粒子計量システム10の測定方法の一例を示したフローチャートである。第1粒子捕捉手段11の捕捉状態をONにし(ステップ19)、所定時間が経過したかを判断する(ステップ20)。所定時間としてはたとえば10分を例示できる。所定時間を経過するまではステップ20を繰り返す。所定時間を経過したと判断した場合には、第1粒子捕捉手段11の捕捉状態をOFFすなわち解放状態にする(ステップ21)。その後、粒子センサ12のキャリブレーションを実行する(ステップ22)。キャリブレーションを第1粒子捕捉手段11のOFF操作の後に行うので、当該操作に伴うノイズの影響を受けることなくキャリブレーションおよび測定を実行できる。次に、粒子センサ12による測定を実行する(ステップ23)。測定結果は制御手段13において濃度換算の計算が行われ、表示装置14に表示される(ステップ24)。その後、測定終了かを判断し(ステップ25)、再度測定を行う場合にはステップ19からの制御を繰り返し、測定終了の場合は測定を終了する(ステップ26)。
【0037】
上記した構成例1の粒子計量システム10によれば、第1粒子捕捉手段11で粒子17の濃度を予め濃縮し、下流に配置した粒子センサ12によって粒子17の数量測定を行うので、システムの検知感度を高めることができる。また、第1粒子捕捉手段11に粒子17を捕捉している状態および解放直後の状態では、粒子センサ12の観測領域18には粒子17はほとんど存在しない。このため、粒子センサ12のキャリブレーションを実行して、高感度な粒子センサ12であってもそのドリフト(ベースライン変動)の影響を除去し、高精度な測定が実現できる。
【0038】
1.2 第2構成例
図4は、本発明の一実施の形態である粒子計量システムについてその基本的構成の他の例である第2構成例を示したブロック図である。本第2構成例は、粒子計量システムに粒子捕捉手段を2つ設ける例である。本第2構成例の粒子計量システム27は、第1粒子捕捉手段11、粒子センサ12、制御手段13、表示装置14および第2粒子捕捉手段28を有する。第1粒子捕捉手段11、粒子センサ12、制御手段13および表示装置14は第1構成例の場合と同様であるので説明を省略する。また、配管15、粒子17、配管15内を流れる流体についても構成例1と同様である。
【0039】
第2粒子捕捉手段28が有する機能や必要な条件は第1粒子捕捉手段11と同様である。ただし、第2粒子捕捉手段28は、粒子センサ12の観測領域18において粒子17が捕捉されるように配置する。構成例2の粒子計量システム27が第2粒子捕捉手段28を有することにより、第1粒子捕捉手段11で捕捉し濃縮した粒子17を観測領域18で再度濃縮できるため、構成例1の場合より精密かつ安定な測定を実行できる。
【0040】
図5は、構成例2の粒子計量システム27の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放された状態を、(c)は粒子17が粒子センサ12の観測領域18まで移動しかつ第2粒子捕捉手段28によって捕捉されている状態を示す。なお図5において、粒子計量システム27の一部は省略している。
【0041】
同図(a)において、第1粒子捕捉手段11はON状態すなわち粒子17を捕捉する状態にある。配管15内を矢印16の方向に流れている流体内には粒子17が存在し、粒子17は、第1粒子捕捉手段11の近傍に到達すると図示するように第1粒子捕捉手段11の周辺に捕捉される。粒子17が捕捉状態にあるとき、流れの下流側に配置されている粒子センサ12の観測領域18には粒子17は到達しないか到達したとしてもごくわずかである。
【0042】
ある程度の量の粒子17が第1粒子捕捉手段11に捕捉された後に、第1粒子捕捉手段11をOFF状態すなわち粒子17を解放する状態にする。同図(b)に示すように粒子17は第1粒子捕捉手段11からの束縛を離れ、流れに従って流体内を拡散する。
【0043】
粒子センサ12の観測領域18に到達した粒子17は、第2粒子捕捉手段28によって観測領域18に捕捉される。観測領域18に存在する粒子17は、その数量に応じた出力信号を粒子センサ12に出力させるが、同図(c)に示すように、粒子17の密度は非常に高く濃縮されているので、非常に高い粒子センサ12の出力が期待できる。
【0044】
すなわち、構成例1の場合は、第1粒子捕捉手段11で粒子濃度が高められても、粒子17が観測領域18に到達した段階では有る程度拡散により濃度が低下した状態になるが、本構成例2では、観測領域18で再度濃度が高められるので、粒子センサ12からの高い出力信号が得られる。また、観点を変えて言えば、構成例1の場合、粒子センサ12の出力レベルを十分高く得るためには、粒子17が拡散により濃度が低下する前に観測を行う必要がある。このため、粒子センサ12を第1粒子捕捉手段11から十分に離して配置することができない。このため、粒子センサ12のキャリブレーションを行う時間を確保することが困難な場合が発生する。しかし、本構成例2では、第1粒子捕捉手段11で濃縮した粒子17が拡散しても、第2粒子捕捉手段28によって再度濃縮を行うので、拡散によって粒子17の濃度が低下しても観測領域18で粒子17が捕捉される限り構わない。この結果、粒子センサ12を第1粒子捕捉手段11から十分に離して配置することが可能となり、粒子センサ12のキャリブレーションを行う時間を十分に確保することが可能になる。
【0045】
図6は、構成例2の粒子計量システム27の測定方法の一例を示したフローチャートである。第1粒子捕捉手段11の捕捉状態をONにし(ステップ19)、所定時間が経過したかを判断する(ステップ20)。所定時間としてはたとえば10分を例示できる。所定時間を経過するまではステップ20を繰り返す。所定時間を経過したと判断した場合には、第1粒子捕捉手段11の捕捉状態をOFFすなわち解放状態にする(ステップ21)。その後、第2粒子捕捉手段28をONすなわち捕捉状態にする(ステップ29)。その後、粒子センサ12のキャリブレーションを実行する(ステップ22)。キャリブレーションを第1粒子捕捉手段11および第2粒子捕捉手段のON・OFF操作の後に行うので、当該操作に伴うノイズの影響を受けることなくキャリブレーションおよび測定を実行できる。次に、粒子センサ12による測定を実行する(ステップ23)。測定結果は制御手段13において濃度換算の計算が行われ、表示装置14に表示される(ステップ24)。その後、終始捕捉手段をリセットする(ステップ30)、その後、測定終了かを判断し(ステップ25)、再度測定を行う場合にはステップ19からの制御を繰り返し、測定終了の場合は測定を終了する(ステップ26)。
【0046】
上記した構成例2の粒子計量システム27によれば、第1粒子捕捉手段11で粒子17の濃度を予め濃縮し、下流に配置した粒子センサ12によって粒子17の数量測定を行う。この測定の際には、第2粒子捕捉手段28で観測領域18の粒子17を再濃縮する。このため、システムの検知感度を、粒子17の拡散状態に関わらず高めることができる。また、第1粒子捕捉手段11に粒子17を捕捉している状態および解放直後の状態では、粒子センサ12の観測領域18には粒子17はほとんど存在しない。このため、粒子センサ12のキャリブレーションを実行して、高感度な粒子センサ12であってもそのドリフト(ベースライン変動)の影響を除去し、高精度な測定が実現できる。さらに、第1粒子捕捉手段11と粒子センサ12とを十分に離して配置できるため、前記のキャリブレーションを十分正確に行うことができる。
【0047】
2.具体的構成
2.1 粒子捕捉手段
以下粒子捕捉手段の具体的構成を例示する。なお、以下に説明する具体的構成では、主に粒子捕捉手段が2つ配置された構成(前記第2構成例に対応する)を例示する。しかし、2つの粒子捕捉手段の1つを省略し1つの粒子捕捉手段として適用できるものについては前記第1構成例に適用できることは言うまでもない。また、粒子捕捉手段として単一の粒子捕捉手段を例示している場合には、それが前記第1構成例に適用できることはもとりより、可能な限り二つの粒子捕捉手段として前記第2構成例に適用できることは言うまでもない。
【0048】
A.電磁石
図7は、粒子捕捉手段の具体的構成を電磁石として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。本例の電磁石は、鋼鉄等強磁性体の磁心31にコイル32を巻きつけた構成を有し、コイル32への通電は電源制御回路33によって制御される。電源制御回路33は制御手段13の一部である。
【0049】
本例の電磁石では、第1粒子捕捉手段11のコイル32に通電し、第1粒子捕捉手段11の磁心31に隣接する配管15内に粒子17を捕捉する。また、第2粒子捕捉手段28のコイル32に通電し、第2粒子捕捉手段28の磁心31に隣接する配管15内に粒子17を捕捉する。これらコイル32への通電の切り替えは電源制御回路33によって行え、前記した構成例1、2の制御が実行できる。
【0050】
なお、本例の電磁石で粒子捕捉手段を構成する場合、粒子17はもとより磁性体である必要がある。その他、配管15が常磁性体(非磁性体)であることも必要である。本例の電磁石で粒子捕捉手段を構成すれば、粒子17の濃縮操作を配管15の外部から非接触で行える利点がある。
【0051】
B.ソレノイド式磁石
図8は、粒子捕捉手段の具体的構成をソレノイド式磁石として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。本例のソレノイド式磁石は、ソレノイド41と駆動用鉄心42と駆動用鉄心42の片辺に備えた永久磁石43とを有し、駆動用鉄心42をソレノイド41の内部に配置する。ソレノイド41への通電によって駆動用鉄心42を駆動し、永久磁石43を配管15の管壁に接触あるいは非接触として粒子17の捕捉あるいは解放を制御する。ソレノイド41への通電は電源制御回路44によって制御する。電源制御回路44は制御手段13の一部である。
【0052】
本例のソレノイド式磁石では、第1粒子捕捉手段11のソレノイド41に通電し、第1粒子捕捉手段11の永久磁石43に隣接する配管15内に粒子17を捕捉する。また、第2粒子捕捉手段28のソレノイド41に通電し、第2粒子捕捉手段28の永久磁石43に隣接する配管15内に粒子17を捕捉する。これらソレノイド41への通電の切り替えは電源制御回路44によって行え、前記した構成例1、2の制御が実行できる。
【0053】
なお、本例のソレノイド式磁石で粒子捕捉手段を構成する場合、粒子17はもとより磁性体である必要がある。その他、配管15が常磁性体(非磁性体)であることも必要である。本例のソレノイド式磁石で粒子捕捉手段を構成すれば、粒子17の濃縮操作を配管15の外部から非接触で行える利点がある。
【0054】
C.モータ駆動式磁石
図9は、粒子捕捉手段の具体的構成をモータ駆動式磁石として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。本例のモータ駆動式磁石は、モータ50とクランク51とクランク51の先端に備えた永久磁石52とを有し、モータ50を回転駆動することによって永久磁石52の位置を移動させ、粒子17の捕捉位置を制御する。モータ50の回転駆動はモータ制御回路53によって制御する。モータ制御回路53は制御手段13の一部である。
【0055】
本例のモータ駆動式磁石では、モータ50を回転駆動し、同図(a)に示す位置で永久磁石52を停止して第1粒子捕捉手段11の粒子捕捉位置に粒子17を捕捉する。また、モータ50を回転駆動し、同図(b)に示す位置で永久磁石52を停止して第2粒子捕捉手段28の粒子捕捉位置に粒子17を捕捉する。モータ50の回転制御はモータ制御回路53によって行え、前記した構成例1、2の制御が実行できる。
【0056】
なお、本例のモータ駆動式磁石で粒子捕捉手段を構成する場合、粒子17はもとより磁性体である必要がある。その他、配管15が常磁性体(非磁性体)であることも必要である。本例のモータ駆動式磁石で粒子捕捉手段を構成すれば、粒子17の濃縮操作を配管15の外部から非接触で行える利点がある。
【0057】
D.荷電集塵方式
図10は、粒子捕捉手段の具体的構成を荷電集塵方式手段として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17'が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17'が捕捉されている状態を示す。本例の荷電集塵方式手段は、プローブ61、第1電極62、第2電極63、高圧電源64、制御電源65、制御回路66を有する。本例の荷電集塵方式手段では、電流導入端子67を介して配管15の内部にプローブ61を導入し、高圧電源64からプローブ61に印加した高電圧(たとえば−1kV)によって粒子17にたとえば負電荷を与える。電荷を与えられた粒子17'は、制御電源65から第1電極62あるいは第2電極63に与えられる電圧によって捕捉されあるいは解放される。制御回路66は高圧電源64および制御電源65を制御し、高圧電源64、制御電源65および制御回路66は制御手段13の一部である。
【0058】
本例の荷電集塵方式手段では、高圧電源64からプローブ61を介して粒子17にたとえば負電荷を付与し、制御電源65によって第1電極62にたとえば正電圧を印加して第1粒子捕捉手段11の粒子捕捉位置に粒子17'を捕捉する。第1粒子捕捉手段11における粒子17'の解放は、第1電極62にたとえば負電圧を印加して行う。また、制御電源65によって第2電極63にたとえば正電圧を印加して第2粒子捕捉手段28の粒子捕捉位置に粒子17'を捕捉する。第2粒子捕捉手段28における粒子17'の解放は、第2電極63にたとえば負電圧を印加して行う。制御電源65による第1電極62および第2電極63への印加電圧極性によって前記した構成例1、2の制御が実行できる。なお、前記した電荷の極性を正電荷に変更できることは言うまでもない。この場合、捕捉あるいは解放動作における制御電圧の極性を逆にすることは勿論である。
【0059】
本例の荷電集塵方式手段で粒子捕捉手段を構成する場合、粒子17は導体、半導体、絶縁体の何れでも構わないが、配管15内を流れる流体の電離度あるいはイオン化エネルギーより小さいことが必要である。また、流体は絶縁体であることを要し、配管15は少なくとも前記各部材が配置される領域では絶縁体である必要がある。
【0060】
E.メッシュ
図11は、粒子捕捉手段の具体的構成をメッシュ(網)として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第2粒子捕捉手段28に粒子17が捕捉されている状態を示す。メッシュ70は、回転導入端子71に固定され、配管15の外部から回転導入端子71に回転を与えて流体の流れ16に対するメッシュ70の角度を制御する。
【0061】
本例では、第1粒子捕捉手段11のメッシュ70の面を配管15に流れる流体の流れに対向するように配置して粒子17を捕捉する。粒子17の解放は、メッシュ70の面を回転してその法線が流れの方向に対し垂直(流れと面が平行)になるよう、あるいは、メッシュ70の面が逆向きになるまで回転して行う。第2粒子捕捉手段28においても同様に行える。本例の場合、メッシュ70が粒子17を捕捉するに十分な細かな目を必要とするが、粒子17、配管15および流体の電気的物性、磁気的物性に左右されないメリットがある。
【0062】
F.吸着材
図12は、粒子捕捉手段の具体的構成を吸着材として構成した場合の一例を示したブロック図である。(a)は、第1粒子捕捉手段11に粒子17が捕捉されている状態を、(b)は第1粒子捕捉手段11から粒子17が解放されている状態を示す。本例では、粒子捕捉手段として、吸着材80とヒータ81とを有する構成を例示する。吸着材80は、気体である粒子17を吸着する性質を有し、ヒータ81に通電して吸着材80を加熱することにより、粒子17を解放する。ヒータ81はヒータ電源82によって通電され、ヒータ電源82は、制御回路83で制御される。ヒータ電源82および制御回路83は制御手段13の一部である。
【0063】
本例では、吸着材80を室温程度に保持することにより粒子17を吸着し(吸着材の元来有する吸着性能を利用する)、ヒータ81によって吸着材80を加熱することによって粒子17を解放する(吸着物質に熱エネルギーを与えて吸着表面から離脱させる)。吸着材としてはたとえば活性炭を、粒子としては一酸化炭素、ホルムアルデヒド、トルエン、キシレン等の分子状ガス、排ガス中の微粒子物質を例示できる。本例では、粒子17として分子状あるいはそれに類する程度に微細な粒子であることが要求されるが、粒子17、配管15および流体の電気的、磁気的性質に左右されないメリットがある。
【0064】
2.2 粒子センサ
以下粒子センサの具体的構成を例示する。なお、ここで例示する粒子センサは、単独で用いることも可能であるし、組み合わせて適用することも可能である。
【0065】
A.渦電流利用方式(1)
図13は、粒子センサ12の一例を示したブロック図である。本例の粒子センサ12は、配管15に巻き付けたコイル90と、発振回路91と、周波数カウンタ92とを有する。コイル90は、発振回路91からの交流電圧(電流)を受けて交流磁界を発生する。観測領域18に粒子17が存在すれば、コイル90からの交流磁界によって粒子17内に渦電流を発生する。渦電流が発生すると、この渦電流に起因する交流磁界が発生し、コイル90に影響を及ぼす。このコイル90への影響はコイル90のインダクタンス変化として観察され、発振回路91の共振周波数(発振周波数)を変動させる。この周波数変動が周波数カウンタ92によって観測され、粒子17を検知することが可能になる。なお、周波数変動の大きさは粒子17の量と正相関の関係にあるため、周波数変動量を観測することによって粒子17の数量を計測できる。
【0066】
本例の粒子センサ12では、粒子17内に渦電流を発生することが要件となるため、粒子17には導電体または半導体が含まれることが必要である。また、配管15および流体には観測に必要な量の磁束が透過する必要があるため、強磁性体は好ましくない。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。
【0067】
B.渦電流利用方式(2)
図14は、粒子センサ12の他の例を示したブロック図である。本例の粒子センサ12は、前記図13の場合と同様、粒子17に発生する渦電流を利用する。本例の粒子センサ12は、配管15に巻き付けるコイルとして、励磁用コイル100とセンサコイル101および102の3つのコイルを有し、発振器103、ブリッジ104、位相器105、増幅器106、同期検波器107を備える。発振器103によって励磁用コイル100を駆動し、励磁用の交流磁界を発生する。励磁用交流磁界は観測領域18にある粒子17に渦電流を発生させる。発生した渦電流は磁界を発生し、この渦電流による磁界はセンサコイル101および102によって検出される。本例では、励磁用コイル100を独立に設けているので、励磁電流を大きくして大きな渦電流を発生させることができ、センサの感度を向上することができる。また、センサコイル101および102はブリッジ104によってブリッジ回路を構成し、インピーダンス(インダクタンス)の変化を高感度に検出できる。さらに、発振器からの信号を、位相器105を介して同期検波器107に伝達し、同期検波器107において増幅器106により増幅したブリッジ回路の出力を同期検波するので、微少な出力を高感度に検出することが可能である。
【0068】
本例の粒子センサ12では、図13の場合と同様に、粒子17内に渦電流を発生することが要件となるため、粒子17には導電体または半導体が含まれることが必要である。また、配管15および流体には観測に必要な量の磁束が透過する必要があるため、強磁性体は好ましくない。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。
【0069】
C.ホール素子
図15は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、ホール素子110を有し、磁石112および113で生成した外部磁場114の変動をホール素子110によって検出する。ホール素子110は、増幅・制御装置111によって制御されその出力が増幅される。
【0070】
本例の場合、粒子17の透磁率が配管15内を流れる流体の透磁率と相違すれば、粒子17の存在により外部磁場114に影響を与え、これを検知できる。ただし、外部磁場114への影響を大きくするためには、粒子17の透磁率は大きいことが好ましい。また、外部磁場114が観測領域18に透過するためには、配管15は常磁性体であることが好ましい。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。なお、外部磁場114の変動が十分大きく、その検出感度が問題にならない場合には、ホール素子110に代えて、適当な磁場変動検出素子(たとえばインダクタンス素子)を用いることもできる。
【0071】
D.コンデンサ方式
図16は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、配管15を挟む一対の電極120および121からなるコンデンサを有し、このコンデンサに共振する電圧を印加する発振回路122および周波数カウンタ123を備える。観測領域18に存在する粒子17の誘電率が配管15内の流体の誘電率と相違するなら、粒子17の存在はコンデンサのキャパシタンスを変動させ、キャパシタンス変動は発振回路122から印加される発振周波数に影響する。よって、この発振周波数の変動を周波数カウンタ123で検知すれば、粒子17の存在が検知できる。なお、周波数変動の大きさは粒子17の数量と相関関係があるので、周波数変動の大きさによって粒子17の数量を計測できる。
【0072】
本例の場合、粒子17に必要とされる要件は、配管15内の流体の誘電率との相違である。コンデンサのキャパシタンスを大きく変動させるためには、誘電率の相違が大きいほど好ましい。また、観測領域18に電束が透過する必要があるから、配管15および流体は絶縁体である必要がある。本例の粒子センサ12によれば、配管15に工作を施すことなく、粒子17の数量を配管15の外部から非接触で測定することが可能である。なお、本例のコンデンサに図14に示すブリッジ回路を適用してキャパシタンスの変動をより高感度に検出するようにすることも勿論可能である。
【0073】
E.光学的方式
図17は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、レーザー発振器130、受光素子131、増幅器132を有し、レーザー発振器130で生成したレーザー光133を配管15に設けた光学窓134を透して観測領域18に照射する。観測領域18に粒子17が存在すれば、散乱光135を生じる。散乱光135は光学窓134を透して配管15の外部に取り出し、光学系136を介して受光素子131によって検知できる。散乱光強度は粒子17の量に正相関するため、受光素子131の出力(増幅器132の出力)によって粒子17の数量を計測できる。
【0074】
本例の場合、粒子17に必要とされる要件は、配管15内の流体との屈折率の相違である。さらに、流体は、レーザー光133を透過する必要がある。本例の粒子センサ12によれば、粒子17の屈折率を除く物性は特に問題とならない利点がある。また、配管15には光学窓134を設けるので、その材質に制限はない。なお、配管15自体がレーザー光133を透過するものであれば、光学窓134は必要ではない。
【0075】
なお、ここではレーザー光133の散乱光135を計測する例を示したが、レーザー光133の透過率を測定することも可能である。この場合、粒子17はレーザー光133の波長の光を吸収する物質である必要がある。なお、粒子17に当該波長の吸収帯がない場合であっても、レーザー光を用いれば、2光子吸収を利用して光透過率測定を行うことが可能な場合がある。また、光吸収を用いた測定の場合、光源はレーザーである必要はない、インコヒーレント光を用いて粒子17の光吸収を測定することも可能である。光吸収測定を行う場合、受光素子は光源に対向する位置に配置することは言うまでもない。
【0076】
F.ガスセンサ
図18は、粒子センサ12のさらに他の例を示したブロック図である。本例の粒子センサ12は、配管15の内部にガスセンサ140を配置する構成である。ガスセンサ140は電流導入端子142を介してセンサ検知駆動回路141に接続される。本例の場合、配管15内の粒子17としてガスが存在する場合、粒子17を適切に計測できる。ガスセンサ140は、計測対象のガスによって適切に選択され、たとえば粒子17がホルムアルデヒド、トルエン、キシレン等の不飽和炭化水素系ガスの場合、たとえば熱線型半導体ガスセンサを例示できる。粒子17がたとえば一酸化炭素の場合には、定電位電解式ガスセンサが利用できる。
【0077】
3.具体的構成例の基本構成への適用
上記した粒子捕捉手段および粒子センサの具体的構成を適宜選択して上記した構成例1あるいは構成例2の粒子計量システムに適用することが可能である。ただし、粒子17、配管15および流体の物性によって、適用できない具体的構成が存在する。以下、その適用の可否について説明する。
【0078】
前記した粒子センサ12は、その基礎とする物理現象によって5つに分類することが可能である。すなわち、粒子17に発生する渦電流を利用して計測する方式(以下「Iw方式」とする)、粒子17の存在によって影響を受ける外部磁場の変動を計測する方式(以下「Mg方式」とする)、粒子17の存在によって影響を受けるキャパシタンス変動を計測する方式(以下「Cap方式」とする)、光学的方式(以下「Pho方式」とする)、ガスセンサを用いる方式(以下「Gas方式」とする)、である。
【0079】
Iw方式は、観測領域18に交流磁界が到達すること、粒子17に電流が流れることが要件となることから、粒子17は絶縁体であってはならず、配管15および流体は常磁性体であることが必要である。
【0080】
Mg方式は、外部磁界が観測領域18に到達すること、粒子17の存在によって外部磁界が影響を受けることが必要である。よって、Mg方式では、粒子17と流体は透磁率が相違する必要があり、配管15は常磁性体であることが必要である。流体が常磁性体である場合には、粒子17は透磁率が相違する限り常磁性体であっても構わないが、外部磁界への影響(信号)が強いほど好ましいため、粒子17は強磁性体(フェリ磁性またはフェロ磁性)であることが好ましい。
【0081】
Cap方式は、観測領域18に電束が到達すること、粒子17の存在によってキャパシタンスが変化することが必要である。よって、Cap方式では、配管15および流体は絶縁体である必要がある。また、粒子17と流体とは誘電率が相違する必要があるが誘電率の定義から粒子17は導電体であってはならない。
【0082】
Pho方式は、観測領域18に光が到達すること、粒子17の存在によって光が散乱(反射)または吸収されることが必要である。よって、Pho方式では、配管15および流体は光透過性でなくてはならず、粒子17と流体との屈折率が相違することまたは粒子17が光吸収率を有することが必要である。なお、配管15に光学窓を設ける場合には配管15の材質が問題になることはない。また、粒子17と流体との間には界面を有するため、屈折率が極めて高い精度で一致しない限り粒子17の屈折率が問題になることはない。よって、Pho方式では、流体に光透過性が要求される他は粒子17および配管15に大きな制約はない。
【0083】
Gas方式は、センサの感度が観測対象の粒子17(ガス)にあることが必要である。観測対象のガスに適合するガスセンサを選択する限り粒子17、配管15および流体に制限はない。
【0084】
前記した粒子捕捉手段についても、その基礎とする物理によって4つに分類することが可能である。すなわち、粒子を磁気的作用で捕捉する方式(以下「Mg方式」とする)、静電的作用で捕捉する方式(以下「Ele方式」とする)、物理的作用で捕捉する方式(以下「Me方式」とする)、吸着方式で捕捉する方式(以下「Ads方式」とする)、である。
【0085】
Mg方式は、粒子17まで磁界が到達する必要があり、粒子17が磁気的作用によって引力を受ける必要があるから、粒子17は強磁性体であり、配管15および流体は常磁性体である必要がある。
【0086】
Ele方式では、粒子17まで電界が到達し、粒子17に電荷が付与できる必要があるから、粒子17の電気的性質は問われないものの、配管15および流体は絶縁体である必要がある。
【0087】
Me方式では、粒子17が機械的に捕捉されれば足りる。よって、粒子17、配管15および流体の電気的磁気的性質に制限はない。一方Ads方式においても粒子17、配管15および流体の電気的磁気的性質に制限はない。ただし、粒子17はガスまたはこれに準じる程度に微細な粉粒体である必要がある。
【0088】
上記した各方式における粒子センサおよび粒子捕捉手段が、粒子17および配管15の物性によって適用可能か否かを纏めたのが図19に示す表図である。図19は、本実施の形態における粒子センサおよび粒子捕捉手段の各具体的手段が粒子17および配管15の物性によって適用可能か否かを纏めた表図である。なお、同表図において、流体は絶縁体かつ常磁性体とした。流体が磁性流体の場合あるいは導電体(電解質)の場合であっても、前記した粒子センサおよび粒子捕捉手段の具体的構成が適用可能な場合があることは勿論である。しかし、多くの場合、流体として水あるいはオイルのように絶縁体かつ常磁性体が適用されるであろうから、これらの場合を想定して当該表図を作成したものである。
【0089】
同図において、「○」は適用可、「×」は適用不可、「△」は適用可能ではあるが他の手段の選択が好ましいもの、を示す。同図に示すように、粒子17および配管15の何れの組合せにおいても、粒子センサおよび粒子捕捉手段として前記した何れかの方式の具体的構成を選択することによって、構成例1あるいは構成例2の粒子計量システムが実現できる。
【0090】
本実施の形態の粒子計量システムによれば、極めて密度の小さい粒子17を高精度に計測することが可能である。これは、第1粒子捕捉手段11によって粒子17を捕捉し予めその密度を高めた後に粒子センサ12で計測することによって実現される。なお、ここで粒子センサ12としてベースライン変動が無視できないような高感度センサを用いたとしても、粒子捕捉手段11によって粒子17を捕捉する限りその状態では粒子17はセンサの観測領域18に存在しない、あるいは存在したとしてもごく微量であるため、粒子センサ12のキャリブレーションを実施することが可能である。
【0091】
本実施の形態の特に構成例2の粒子計量システムによれば、前記した効果に加えて、粒子センサ12のキャリブレーションを確実に行うことが可能になる効果がある。つまり、センサのキャリブレーションの際には、粒子17の捕捉および解放操作に伴うノイズの混入を回避するために、第1粒子捕捉手段11での粒子解放操作を行った後にキャリブレーションを実行する必要がある。ここで、粒子17が観測領域18に到達するまでにキャリブレーションを完了できれば良いがそうでない場合、キャリブレーションの確度が低下する恐れがある(キャリブレーションの途中で有る程度の粒子が観測領域に到達してしまう)。キャリブレーションの確度を高めようとすれば第1粒子捕捉手段11と粒子センサ12とを十分離して配置する必要があるがあまりに離しすぎると第1粒子捕捉手段11で濃縮した粒子17が観測領域18に到達するまでに拡散して粒子濃縮の効果が低下してしまう。そこで、構成例2では第2粒子捕捉手段28を設けて粒子17が拡散したとしても再度これを濃縮する手段を備えたものである。この結果、第1粒子捕捉手段11と粒子センサ12との間の距離を十分に長くしてキャリブレーションのための時間を確保することが可能になる。
【0092】
また、構成例2の粒子計量システムでは、粒子17が拡散したとしても、第2粒子捕捉手段28によって観測領域18に粒子17を再度集めるので、拡散の影響を排除できる。これは流体の流速によって観測結果が影響されず、安定した測定が可能であることを意味する。
【0093】
図20は、本実施の形態の粒子計量システムによって実際に粒子計量を行った結果を示すグラフである。図20において縦軸はセンサ出力(任意スケール)、横軸は時間(任意スケール)である。ライン150は、構成例2の粒子計量システムによる実験結果であり、ライン151は構成例1の粒子計量システムによる実験結果である。なお、粒子センサ12としては前記したB.渦電流利用方式(2)の具体的構成を適用し、粒子捕捉手段としては前記したB.ソレノイド式磁石の具体的構成を適用した。配管15はビニール配管を、流体としてエンジンオイルを、粒子17としては鉄粉を用いた。エンジンオイル内の鉄粉濃度は50ppmとした。また、第1粒子捕捉手段11での捕捉時間は10分である。時刻t1で第1粒子捕捉手段11での粒子解放操作を行う(構成例2の場合同時に第2粒子捕捉手段28の捕捉を開始する)。ライン152はベースラインの変動を示す。
【0094】
図示するように、ライン150(構成例2の場合)の信号レベル(矢印153で示す幅)は、ライン151(構成例1の場合)の信号レベル(矢印154で示す幅)より格段に大きい。すなわち、構成例2では大きな信号レベルが得られる。ライン151でも勿論測定は可能であるが、ベースライン変動が大きくなれば信号がベースライン変動に埋もれてしまう可能性もある。より安定な測定のためには信号レベルの大きい構成例2が好ましいことがわかる。
【0095】
以上、本発明を具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。たとえば、前記実施の形態における粒子計量システムの測定方法を図21に示すように変更することも可能である。すなわち、粒子センサによる測定(ステップ23)の後、測定値が閾値(測定閾値)以上であるかを判断する(ステップ160)。測定値が測定閾値以上であると判断した場合には図6(図3)の場合と同様に濃度計算を行ってさらに結果を表示する(ステップ24)。しかし測定値が測定閾値以上でないと判断した場合には、捕捉時間が閾値(捕捉時間閾値)以上であるかを判断し(ステップ161)、捕捉時間が捕捉時間閾値を越えていないと判断した場合には捕捉時間を増加して(ステップ162)測定を繰り返す。一方、捕捉時間が捕捉時間閾値以上である場合には粒子が検出できないと判断して検出濃度を0とする(ステップ163)。このような方法により、捕捉時間を最適化することが可能になる。
【0096】
また、上記した実施の形態の粒子計量システムは、図22に示すようなプラント170の劣化検査に応用することができる。すなわち、プラント170にフランジ171で接続されている配管172に上記した粒子計量システムを配置する。なお、同図では構成例2の場合を例示しているが構成例1の粒子計量システムでもよいことは言うまでもない。
【0097】
プラント170内の反応槽あるいは配管には通常流体が常時還流し、プラント内の反応によってあるいは還流する流体自体によってその反応槽や配管の内部が研削される。これら研削物は粒子として還流液体内に存在することになる。この研削された粒子濃度をモニタすることによってプラントの劣化状態をモニタすることができる。原子力発電等のプラントにおいては冷却水等が高温高圧状態で長期間還流されており、その使用状態が過酷であって配管等の部材に係る負荷が大きいにも関わらずその安全性が重視されなければならない。これらプラントの劣化モニタとして本粒子計量システムを適用すれば、ごく微量の研削粒子が高感度に検出できるので早い段階での劣化検出が可能になる。また、粒子捕捉手段および粒子センサを適切に選択すれば、粒子密度を配管の外部から非接触で計量できるため、劣化モニタのためのプラントの改造等を行う必要がない。プラントの稼動状況に関わらず劣化モニタとして適用できるため、連続運転を前提とするようなプラントに適用して大きな効果が得られる。
【産業上の利用可能性】
【0098】
本願発明は、流体内に存在する低濃度の粒子を検出するシステムおよび方法に関する発明であり、工業計測全般およびプラントやエンジンの劣化モニタの分野に適用することが可能な発明である。
【図面の簡単な説明】
【0099】
【図1】本発明の一実施の形態である粒子計量システムについてその基本的構成の一例である第1構成例を示したブロック図である。
【図2】構成例1の粒子計量システム10の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放され、粒子センサ12の観測領域18まで移動してきた状態を示す。
【図3】構成例1の粒子計量システム10の測定方法の一例を示したフローチャートである。
【図4】本発明の一実施の形態である粒子計量システムについてその基本的構成の他の例である第2構成例を示したブロック図である。
【図5】構成例2の粒子計量システム27の動作を説明するための模式図であり、(a)は、粒子17が第1粒子捕捉手段11によって捕捉されている状態を、(b)は、捕捉されていた粒子17が解放され、粒子センサ12の観測領域18まで移動してきた状態を示す。
【図6】構成例2の粒子計量システム27の測定方法の一例を示したフローチャートである。
【図7】粒子捕捉手段の具体的構成を電磁石として構成した場合の一例を示したブロック図である。
【図8】粒子捕捉手段の具体的構成をソレノイド式磁石として構成した場合の一例を示したブロック図である。
【図9】粒子捕捉手段の具体的構成をモータ駆動式磁石として構成した場合の一例を示したブロック図である。
【図10】粒子捕捉手段の具体的構成を荷電集塵方式手段として構成した場合の一例を示したブロック図である。
【図11】粒子捕捉手段の具体的構成をメッシュ(網)として構成した場合の一例を示したブロック図である。
【図12】粒子捕捉手段の具体的構成を吸着材として構成した場合の一例を示したブロック図である。
【図13】粒子センサ12の一例を示したブロック図である。
【図14】粒子センサ12の他の例を示したブロック図である。
【図15】粒子センサ12のさらに他の例を示したブロック図である。
【図16】粒子センサ12のさらに他の例を示したブロック図である。
【図17】粒子センサ12のさらに他の例を示したブロック図である。
【図18】粒子センサ12のさらに他の例を示したブロック図である。
【図19】本実施の形態における粒子センサおよび粒子捕捉手段の各具体的手段が粒子17および配管15の物性によって適用可能か否かを纏めた表図である。
【図20】本発明の一実施の形態である粒子計量システムによって実際に粒子計量を行った結果を示すグラフである。
【図21】粒子計量システムの測定方法の他の例を示したフローチャートである。
【図22】粒子計量システムをプラントに適用した場合の一例を示すブロック図である。
【符号の説明】
【0100】
10…粒子計量システム、11…第1粒子捕捉手段、12…粒子センサ、13…制御手段、14…表示装置、15…配管、17…粒子、18…観測領域、27…粒子計量システム、28…第2粒子捕捉手段、31…磁心、32…コイル、33…電源制御回路、41…ソレノイド、42…駆動用鉄心、43…永久磁石、44…電源制御回路、50…モータ、51…クランク、52…永久磁石、53…モータ制御回路、61…プローブ、62…第1電極、63…第2電極、64…高圧電源、65…制御電源、66…制御回路、67…電流導入端子、70…メッシュ、71…回転導入端子、80…吸着材、81…ヒータ、82…ヒータ電源、83…制御回路、90…コイル、91…発振回路、92…周波数カウンタ、100…励磁用コイル、101,102…センサコイル、103…発振器、104…ブリッジ、105…位相器、106…増幅器、107…同期検波器、110…ホール素子、111…増幅・制御装置、112,113…磁石、114…外部磁場、120,121…電極、122…発振回路、123…周波数カウンタ、130…レーザー発振器、131…受光素子、132…増幅器、133…レーザー光、134…光学窓、135…散乱光、136…光学系、140…ガスセンサ、141…センサ検知駆動回路、142…電流導入端子、170…プラント、171…フランジ、172…配管。
【特許請求の範囲】
【請求項1】
所定方向への流れを有する液体または気体内に存在する粒子の数または量を測定する粒子計量システムであって、
前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、
前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置され、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、
を有する粒子計量システム。
【請求項2】
前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有する請求項1記載の粒子計量システム。
【請求項3】
前記第1の粒子捕捉手段が前記粒子を解放した後に、解放された前記粒子が前記観測領域に到達するまでの時間が、前記粒子センサをキャリブレーションするに必要な時間以上であるよう前記粒子センサを前記第1の粒子捕捉手段から離して配置する請求項2記載の粒子計量システム。
【請求項4】
前記粒子には磁性体を含み、前記粒子の捕捉を、磁力を利用して行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項5】
前記粒子に電荷を付与する電荷付与手段をさらに含み、前記粒子の捕捉を、静電力を利用して行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項6】
前記粒子の捕捉を、前記流れを構成する物質を透過し前記粒子の透過を阻害する濾過手段により行い、前記捕捉の解放を、前記濾過手段の前記流れに対する方向を反転することにより行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項7】
前記粒子の捕捉を、前記粒子を選択的に吸着する吸着材により行い、前記捕捉の解放を、前記吸着材を加熱することにより行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項8】
前記粒子には導電体または半導体を含み、前記粒子センサには誘導素子を含み、前記誘導素子または励磁用誘導素子によって発生させた外部交流磁界による前記導電体または半導体内部の渦電流に起因する前記誘導素子のインダクタンス変化によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項9】
前記粒子には磁性体を含み、前記粒子センサには磁界を発生する磁界発生手段と、ホール素子とを含み、前記ホール素子が検知する磁界の変動によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項10】
前記粒子には誘電体を含み、前記粒子センサには容量素子を含み、前記容量素子のキャパシタンスの変化によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項11】
前記粒子センサには、レーザー光発生手段と、前記レーザー光が前記粒子によって散乱された散乱光強度を測定する手段とを有し、前記散乱光強度によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項12】
前記粒子がガス状分子であり、前記粒子センサが、前記ガス状分子の数または濃度を計測するガスセンサである請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項13】
所定方向への流れを有する液体または気体内に存在する粒子の数または量を測定し、前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置されその観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する粒子計量システムを用いた粒子計量方法であって、
前記第1の粒子捕捉手段により、所定の捕捉時間の間前記粒子を捕捉するステップと、
捕捉された前記粒子を解放するステップと、
前記粒子の解放の後に、前記粒子センサのキャリブレーションを実行するステップと、
前記粒子センサによる測定を開始するステップと、
を有する粒子計量方法。
【請求項14】
前記粒子計量システムには、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段を含み、
前記第1の粒子捕捉手段による前記粒子の捕捉中または捕捉された前記粒子の解放後であって前記粒子センサのキャリブレーション前に、前記第2の粒子捕捉手段による前記粒子の捕捉を開始するステップを有する請求項13記載の粒子計量方法。
【請求項15】
前記粒子センサの出力値が所定の閾値以上である場合には、前記出力値または前記出力値から計算された値を表示するステップと、
前記粒子センサの出力値が前記所定の閾値未満である場合には、前記捕捉時間をより長く変更し、前記第1の粒子捕捉手段による前記粒子の捕捉からの一連の前記ステップを繰り返すステップと、
を有する請求項13または14記載の粒子計量方法。
【請求項16】
前記捕捉時間が所定の閾値以上である場合、前記粒子を検出できないと判断する請求項15記載の粒子計量方法。
【請求項17】
その内部に流体が流れる配管を有するプラントにおける前記配管または前記プラントの反応槽の劣化を検知するプラント劣化検知システムであって、
前記配管の外部に配置され、前記流体の流れに抗して前記配管または前記プラントの反応槽を構成する材料または前記材料の化合物からなる粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、
前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置であって前記配管の外部に配置される、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、
を有するプラント劣化検知システム。
【請求項18】
前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有する請求項17記載のプラント劣化検知システム。
【請求項19】
前記第1の粒子捕捉手段が前記粒子を解放した後に、解放された前記粒子が前記観測領域に到達するまでの時間が、前記粒子センサをキャリブレーションするに必要な時間以上であるよう前記粒子センサを前記第1の粒子捕捉手段から離して配置する請求項18記載のプラント劣化検知システム。
【請求項20】
前記粒子が磁性体であり、前記粒子の捕捉を、磁力を利用して行う請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項21】
前記粒子に電荷を付与する電荷付与手段をさらに含み、前記粒子の捕捉を、静電力を利用して請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項22】
前記粒子の捕捉を、前記流れを構成する物質を透過し前記粒子の透過を阻害する濾過手段により行い、前記捕捉の解放を、前記濾過手段の前記流れに対する方向を反転することにより行う請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項23】
前記粒子の捕捉を、前記粒子を選択的に吸着する吸着材により行い、前記捕捉の解放を、前記吸着材を加熱することにより行う請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項24】
前記粒子が導電体または半導体であり、前記粒子センサには誘導素子を含み、前記誘導素子または励磁用誘導素子によって発生させた外部交流磁界による前記粒子内部の渦電流に起因する前記誘導素子のインダクタンス変化によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項25】
前記粒子が磁性体であり、前記粒子センサには磁界を発生する磁界発生手段と、ホール素子とを含み、前記ホール素子が検知する磁界の変動によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項26】
前記粒子が前記流体を構成する材料の誘電率とは相違する誘電率を有する材料からなり、前記粒子センサには容量素子を含み、前記容量素子のキャパシタンスの変化によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項27】
前記粒子センサには、レーザー光発生手段と、前記レーザー光が前記粒子によって散乱された散乱光強度を測定する手段とを有し、前記散乱光強度によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項28】
前記粒子がガス状分子であり、前記粒子センサが、前記ガス状分子の数または濃度を計測するガスセンサである請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項29】
その内部に流体が流れる配管を有するプラントにおける前記配管または前記プラントの反応槽の劣化を検知し、前記配管の外部に配置され、前記流体の流れに抗して前記配管または前記プラントの反応槽を構成する材料または前記材料の化合物からなる粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置であって前記配管の外部に配置される、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有するプラント劣化検知システムを利用したプラント劣化検知方法であって、
前記第1の粒子捕捉手段により、所定の捕捉時間の間前記粒子を捕捉するステップと、
捕捉された前記粒子を解放するステップと、
前記粒子の解放の後に、前記粒子センサのキャリブレーションを実行するステップと、
前記粒子センサによる測定を開始するステップと、
を有するプラント劣化検知方法。
【請求項30】
前記プラント劣化検知システムには、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段を含み、
前記第1の粒子捕捉手段による前記粒子の捕捉中または捕捉された前記粒子の解放後であって前記粒子センサのキャリブレーション前に、前記第2の粒子捕捉手段による前記粒子の捕捉を開始するステップを有する請求項29記載のプラント劣化検知方法。
【請求項31】
前記粒子センサの出力値が所定の閾値以上である場合には、前記出力値または前記出力値から計算された値を表示するステップと、
前記粒子センサの出力値が前記所定の閾値未満である場合には、前記捕捉時間をより長く変更し、前記第1の粒子捕捉手段による前記粒子の捕捉からの一連の前記ステップを繰り返すステップと、
を有する請求項29または30記載のプラント劣化検知方法。
【請求項32】
前記粒子センサの出力値が所定の第2閾値以上になった場合、警報を発するステップを有する請求項29または30記載のプラント劣化検知方法。
【請求項1】
所定方向への流れを有する液体または気体内に存在する粒子の数または量を測定する粒子計量システムであって、
前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、
前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置され、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、
を有する粒子計量システム。
【請求項2】
前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有する請求項1記載の粒子計量システム。
【請求項3】
前記第1の粒子捕捉手段が前記粒子を解放した後に、解放された前記粒子が前記観測領域に到達するまでの時間が、前記粒子センサをキャリブレーションするに必要な時間以上であるよう前記粒子センサを前記第1の粒子捕捉手段から離して配置する請求項2記載の粒子計量システム。
【請求項4】
前記粒子には磁性体を含み、前記粒子の捕捉を、磁力を利用して行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項5】
前記粒子に電荷を付与する電荷付与手段をさらに含み、前記粒子の捕捉を、静電力を利用して行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項6】
前記粒子の捕捉を、前記流れを構成する物質を透過し前記粒子の透過を阻害する濾過手段により行い、前記捕捉の解放を、前記濾過手段の前記流れに対する方向を反転することにより行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項7】
前記粒子の捕捉を、前記粒子を選択的に吸着する吸着材により行い、前記捕捉の解放を、前記吸着材を加熱することにより行う請求項1〜3の何れか一項に記載の粒子計量システム。
【請求項8】
前記粒子には導電体または半導体を含み、前記粒子センサには誘導素子を含み、前記誘導素子または励磁用誘導素子によって発生させた外部交流磁界による前記導電体または半導体内部の渦電流に起因する前記誘導素子のインダクタンス変化によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項9】
前記粒子には磁性体を含み、前記粒子センサには磁界を発生する磁界発生手段と、ホール素子とを含み、前記ホール素子が検知する磁界の変動によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項10】
前記粒子には誘電体を含み、前記粒子センサには容量素子を含み、前記容量素子のキャパシタンスの変化によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項11】
前記粒子センサには、レーザー光発生手段と、前記レーザー光が前記粒子によって散乱された散乱光強度を測定する手段とを有し、前記散乱光強度によって、前記粒子の数または量を計測する請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項12】
前記粒子がガス状分子であり、前記粒子センサが、前記ガス状分子の数または濃度を計測するガスセンサである請求項1〜7の何れか一項に記載の粒子計量システム。
【請求項13】
所定方向への流れを有する液体または気体内に存在する粒子の数または量を測定し、前記流れに抗して前記粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置に配置されその観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有する粒子計量システムを用いた粒子計量方法であって、
前記第1の粒子捕捉手段により、所定の捕捉時間の間前記粒子を捕捉するステップと、
捕捉された前記粒子を解放するステップと、
前記粒子の解放の後に、前記粒子センサのキャリブレーションを実行するステップと、
前記粒子センサによる測定を開始するステップと、
を有する粒子計量方法。
【請求項14】
前記粒子計量システムには、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段を含み、
前記第1の粒子捕捉手段による前記粒子の捕捉中または捕捉された前記粒子の解放後であって前記粒子センサのキャリブレーション前に、前記第2の粒子捕捉手段による前記粒子の捕捉を開始するステップを有する請求項13記載の粒子計量方法。
【請求項15】
前記粒子センサの出力値が所定の閾値以上である場合には、前記出力値または前記出力値から計算された値を表示するステップと、
前記粒子センサの出力値が前記所定の閾値未満である場合には、前記捕捉時間をより長く変更し、前記第1の粒子捕捉手段による前記粒子の捕捉からの一連の前記ステップを繰り返すステップと、
を有する請求項13または14記載の粒子計量方法。
【請求項16】
前記捕捉時間が所定の閾値以上である場合、前記粒子を検出できないと判断する請求項15記載の粒子計量方法。
【請求項17】
その内部に流体が流れる配管を有するプラントにおける前記配管または前記プラントの反応槽の劣化を検知するプラント劣化検知システムであって、
前記配管の外部に配置され、前記流体の流れに抗して前記配管または前記プラントの反応槽を構成する材料または前記材料の化合物からなる粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、
前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置であって前記配管の外部に配置される、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、
を有するプラント劣化検知システム。
【請求項18】
前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段をさらに有する請求項17記載のプラント劣化検知システム。
【請求項19】
前記第1の粒子捕捉手段が前記粒子を解放した後に、解放された前記粒子が前記観測領域に到達するまでの時間が、前記粒子センサをキャリブレーションするに必要な時間以上であるよう前記粒子センサを前記第1の粒子捕捉手段から離して配置する請求項18記載のプラント劣化検知システム。
【請求項20】
前記粒子が磁性体であり、前記粒子の捕捉を、磁力を利用して行う請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項21】
前記粒子に電荷を付与する電荷付与手段をさらに含み、前記粒子の捕捉を、静電力を利用して請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項22】
前記粒子の捕捉を、前記流れを構成する物質を透過し前記粒子の透過を阻害する濾過手段により行い、前記捕捉の解放を、前記濾過手段の前記流れに対する方向を反転することにより行う請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項23】
前記粒子の捕捉を、前記粒子を選択的に吸着する吸着材により行い、前記捕捉の解放を、前記吸着材を加熱することにより行う請求項17〜19の何れか一項に記載のプラント劣化検知システム。
【請求項24】
前記粒子が導電体または半導体であり、前記粒子センサには誘導素子を含み、前記誘導素子または励磁用誘導素子によって発生させた外部交流磁界による前記粒子内部の渦電流に起因する前記誘導素子のインダクタンス変化によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項25】
前記粒子が磁性体であり、前記粒子センサには磁界を発生する磁界発生手段と、ホール素子とを含み、前記ホール素子が検知する磁界の変動によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項26】
前記粒子が前記流体を構成する材料の誘電率とは相違する誘電率を有する材料からなり、前記粒子センサには容量素子を含み、前記容量素子のキャパシタンスの変化によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項27】
前記粒子センサには、レーザー光発生手段と、前記レーザー光が前記粒子によって散乱された散乱光強度を測定する手段とを有し、前記散乱光強度によって、前記粒子センサの出力値を得る請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項28】
前記粒子がガス状分子であり、前記粒子センサが、前記ガス状分子の数または濃度を計測するガスセンサである請求項17〜23の何れか一項に記載のプラント劣化検知システム。
【請求項29】
その内部に流体が流れる配管を有するプラントにおける前記配管または前記プラントの反応槽の劣化を検知し、前記配管の外部に配置され、前記流体の流れに抗して前記配管または前記プラントの反応槽を構成する材料または前記材料の化合物からなる粒子を一定時間捕捉するとともに所定のタイミングで前記粒子の捕捉を解放する第1の粒子捕捉手段と、前記第1の粒子捕捉手段が配置されている位置よりも前記流れの下流位置であって前記配管の外部に配置される、その観測領域にある前記粒子の数または量に応じた出力値を得る粒子センサと、を有するプラント劣化検知システムを利用したプラント劣化検知方法であって、
前記第1の粒子捕捉手段により、所定の捕捉時間の間前記粒子を捕捉するステップと、
捕捉された前記粒子を解放するステップと、
前記粒子の解放の後に、前記粒子センサのキャリブレーションを実行するステップと、
前記粒子センサによる測定を開始するステップと、
を有するプラント劣化検知方法。
【請求項30】
前記プラント劣化検知システムには、前記粒子センサの前記観測領域を含む領域に前記粒子を捕捉する第2の粒子捕捉手段を含み、
前記第1の粒子捕捉手段による前記粒子の捕捉中または捕捉された前記粒子の解放後であって前記粒子センサのキャリブレーション前に、前記第2の粒子捕捉手段による前記粒子の捕捉を開始するステップを有する請求項29記載のプラント劣化検知方法。
【請求項31】
前記粒子センサの出力値が所定の閾値以上である場合には、前記出力値または前記出力値から計算された値を表示するステップと、
前記粒子センサの出力値が前記所定の閾値未満である場合には、前記捕捉時間をより長く変更し、前記第1の粒子捕捉手段による前記粒子の捕捉からの一連の前記ステップを繰り返すステップと、
を有する請求項29または30記載のプラント劣化検知方法。
【請求項32】
前記粒子センサの出力値が所定の第2閾値以上になった場合、警報を発するステップを有する請求項29または30記載のプラント劣化検知方法。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図14】
【図15】

【図16】

【図17】
【図18】
【図19】

【図20】

【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2006−118890(P2006−118890A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2004−304797(P2004−304797)
【出願日】平成16年10月19日(2004.10.19)
【出願人】(000220262)東京瓦斯株式会社 (1,166)
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願日】平成16年10月19日(2004.10.19)
【出願人】(000220262)東京瓦斯株式会社 (1,166)
【Fターム(参考)】
[ Back to top ]