
粒状体堆積物の表面状態計測装置および表面状態計測方法
【課題】距離測定用の一種類の電磁波を用いて、装入物表面レベルと装入物表面の粒状体の粒径分布を同時に計測することにより高炉の生産効率化を実現すること。
【解決手段】高炉2内の粒状体3の堆積物3Aの表面に、測定方向Sに沿って電磁波ビームを走査し、堆積物3Aの表面から反射した電磁波を受信アンテナ103で受信し、電磁波の送信から受信までの時間差から電磁波ビームが照射された表面部分までの距離を測定すると同時に、受信アンテナ103で受信した電磁波の強度の強弱の繰り返し状況から堆積物3Aの表面の粒状体3の粒径分布を推定する。
【解決手段】高炉2内の粒状体3の堆積物3Aの表面に、測定方向Sに沿って電磁波ビームを走査し、堆積物3Aの表面から反射した電磁波を受信アンテナ103で受信し、電磁波の送信から受信までの時間差から電磁波ビームが照射された表面部分までの距離を測定すると同時に、受信アンテナ103で受信した電磁波の強度の強弱の繰り返し状況から堆積物3Aの表面の粒状体3の粒径分布を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、粒状体の堆積物の表面状態を測定する表面状態計測装置および表面状態計測方法に関する。さらに詳しくは、この発明は、例えば高炉内に装入される鉄鉱石やコークスなどの粒状体が堆積してなる堆積物の表面レベルと、堆積物表面の粒状体の粒径分布と、を同時に求めることができる表面状態計測装置および表面状態計測方法に関する。
【背景技術】
【0002】
通常、高炉内には、炉頂部より鉄鉱石とコークスが交互に装入されて堆積する。これら鉄鉱石やコークスの堆積物の表面は、従来からその中心を通る断面形状がV字状となるように設定されている。すなわち、堆積物の表面レベルは、炉内壁から炉の中心へ向けて高さが漸次低くなるように設定されている。このように堆積物の表面の断面形状をV字状にするには、少なくとも炉内壁から炉の中心までの堆積物の表面レベルを測定することが必要となる。
【0003】
ところで、高炉を効率良く操業するということは、高炉内での還元効率を上げることである。還元効率を上げるためには、高炉内の熱分布を最適に保つ必要がある。そして、熱分布を最適に保つには、外部から高炉内に吹き込まれる熱風の炉内流れを安定化させることが重要である。熱風は、高炉下部から炉上部へ流れるように設定されている。この熱風の流れは、装入物(粒状体)の堆積状態によって影響を受ける。
【0004】
そこで、上述したように、炉内堆積物の表面の断面形状をV字状に設定することが行われている。このように堆積物の表面の断面形状をV字状に設定する理由は、装入物である粒状体の粒径の違いに応じて、粒状体が表層斜面を転がって、半径方向および円周方向の位置のどの辺に着地するかをある程度予想することが可能であるからである。そこで、堆積物表面の傾斜状態を適宜制御することにより、堆積物表面の粒径分布を調整することが可能となる。そして、粒径分布を調整することにより、熱風の流れの制御が可能となる。このような制御を行うことにより熱風の流れを安定化させることができ、燃料費の低減や炉体の長寿命化を図ることができる。
【0005】
従来、堆積物の表面レベルの測定方法としては、電磁波、特にマイクロ波、ミリ波、準ミリ波といった波長が数mm〜100mmの電磁波を使用したものがある。このような電磁波は、粉塵や水蒸気を透過し易いため、高炉内のような悪環境下での計測に利用できる。電磁波を用いた測定方法としては、例えば廃棄物ガス化溶融炉のコークスや廃棄物などの充填物層の表面レベルを電磁波を用いて測定する技術(例えば、特許文献1参照)や、坑深さ測定にマイクロ波を用いた技術(例えば、特許文献2参照)などが知られている。高炉の炉頂から投入される装入物のプロフィール測定方法としては、マイクロ波を炉内装入物の表面に照射して反射波を受信し、送信と受信の時間差から装入物の表面までの距離を測定する技術(例えば、特許文献3参照)が知られている。なお、堆積物の表面レベルの測定方法(距離計測)ではないが、高炉への利用例として、高炉内へ鉄鉱石とコークスの粒径に対してそれぞれ分解能を有する互いに波長の異なる複数の電磁波を選択的に照射し反射強度分布から鉄鉱石とコークスを識別する判別法(例えば、特許文献4参照)が知られている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3235427号公報
【特許文献2】特開2002―202363号公報
【特許文献3】特許第2870346号公報
【特許文献4】特開昭60−77911号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上述したように、炉内での熱風の流れの安定化を図るには、堆積物の表面形状の調整と堆積物表面の粒径分布の管理が重要となる。すなわち、炉内において小径の装入物(粒状体)が詰まっていれば熱風は流れにくくなり、大径の装入物が詰まっていれば熱風は流れ易くなるからである。装入物は炉頂部から落下投入される場合が多く、上述したように、粒状体の着地後の転がりを予想し堆積物の粒径や装入位置を制御している。しかしながら、落下後の実際の粒径分布を監視している訳ではない。このように粒状体の着地後の転がりを予想しても、予想が外れた場合には高炉の効率が低下するなど不調になる場合も生じていた。しかしながら、堆積物の粒径分布を管理することは困難であった。
【0008】
単に装入物の表面レベルや表面形状を計測するだけであれば、上記特許文献1〜4の技術を用いて堆積物表面までの距離を測ればよい。しかし、その装入物の粒径に大きなばらつきがあり、炉の中心から炉内壁に亘る方向(半径方向)の粒径分布を評価しようとすると、上記特許文献4のようにそれぞれの層の粒径に応じた周波数を持つ複数の電磁波を選択する必要があった。一般的に、装入物の粒径は5〜50mm程度であり、複数の周波数を用いたりすれば粒径分布計測は対応可能ではあるが、周波数が広帯域のアンテナや信号処理回路の設計製作が非常に高価になるという問題がある。
【0009】
この発明は、上記課題を解決するためになされたものである。そこで、この発明の目的は、簡易な構成で装入物表面レベルと装入物表面の粒径分布を同時に計測することができる堆積物の表面状態計測装置および表面状態計測方法を提供することにある。
【課題を解決するための手段】
【0010】
上述した課題を解決し、目的を達成するために、この発明の第1の特徴は、粒状体堆積物の表面状態計測装置であって、高炉内の粒状体堆積物の表面に、測定方向に沿って電磁波ビームを走査するように送信する送信部と、この粒状体堆積物の表面から反射した電磁波を受信する受信部と、送信部の送信から受信部の受信までの時間差から電磁波ビームが照射された表面までの距離を測定する距離測定部と、受信アンテナで受信した電磁波の強度の測定方向に対する分布から粒状体堆積物の表面の粒径分布を推定する粒径分布推定部と、を備えたことを要旨とする。
【0011】
また、この発明の第1の特徴に係る表面状態計測装置において、送信部と受信部は一体的に設けられ、これら送信部と受信部を、粒状体堆積物の表面に対向させた状態で測定方向に沿って走査駆動する走査駆動部を備えた構成とすることが好ましい。
【0012】
さらに、この発明の第1の特徴に係る表面状態計測装置において、測定方向は、高炉内の内壁部と中心軸との間を結ぶ方向であることが好ましく、さらに、高炉内の堆積物表面の平均的な傾斜面と平行をなすことがより好ましい。
【0013】
この発明の第2の特徴は、粒状体堆積物の表面状態計測方法であって、高炉内の粒状体堆積物の表面に、電磁波ビームを測定方向に沿って走査しながら照射させ、粒状体堆積物の表面で反射した電磁波を受信して、電磁波ビームの送信から受信までの時間差から電磁波が照射された表面までの距離を測定する距離測定工程と、距離測定工程で受信した電磁波の強度の前記測定方向に対する分布から粒状体堆積物の表面の粒径分布を推定する粒径分布推定工程と、を含むことを要旨とする。
【0014】
この第2の特徴において、粒径分布推定工程では、受信した電磁波の強度の測定方向に対する分布に対応する粒径分布推定用データを参照して、粒状体堆積物の表面の粒径分布を推定してもよい。
【発明の効果】
【0015】
この発明によれば、距離測定に用いる単一波長(一種類の)の電磁波の受信状況から装入物表面レベルと装入物表面の粒径分布を同時に計測することができ、高炉の生産効率化を実現することができる。
【0016】
また、この発明によれば、距離測定に用いた電磁波での分解能以下の粒径の粒状体が混じる堆積物表面の粒径分布を把握することができる。したがって、周波数が広帯域のアンテナや高価な設計製作を要する信号処理回路を増加させることがない。したがって、この発明によれば、低コストで測定精度の高い粒状体堆積物の表面状態計測装置を実現できる。
【図面の簡単な説明】
【0017】
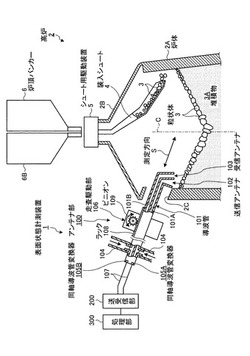
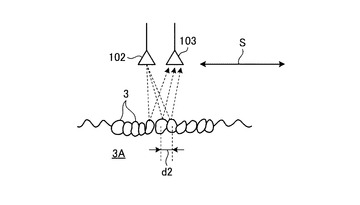
【図1】図1は、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置を高炉上部に設置した構造を示す説明図である。
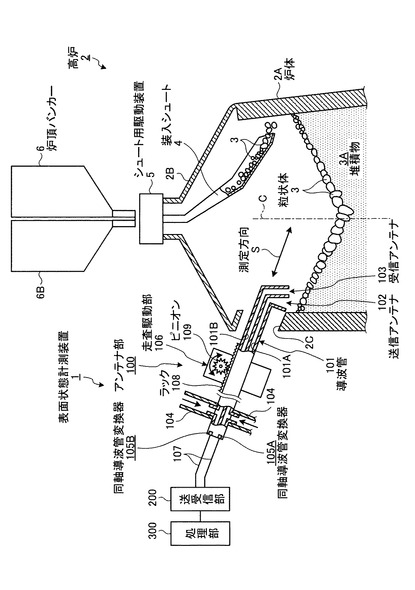
【図2】図2は、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置を示すブロック図である。
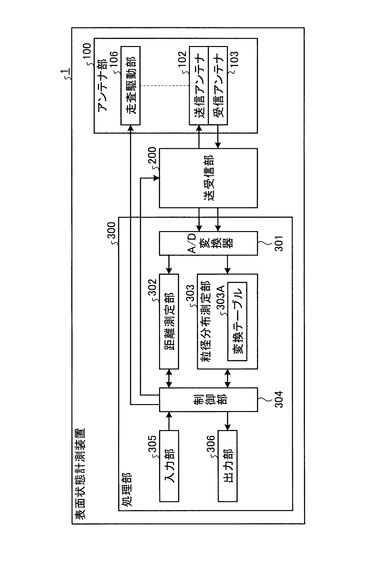
【図3】図3は、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置における送受信部を示す回路図である。
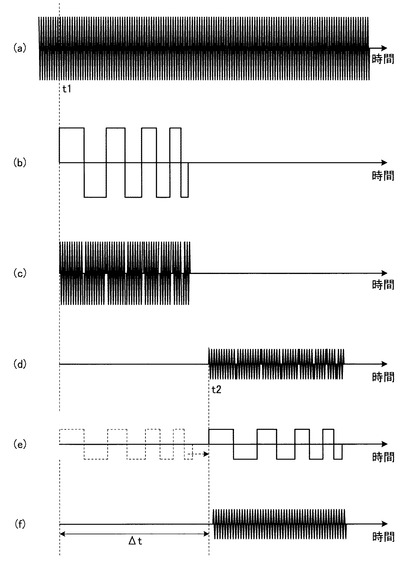
【図4】図4は、表面状態を検出するための各波形を示す図であり、図4(a)は送受信部の搬送波発信器から発信させる搬送波の波形図、(b)はFMパルス発生器で発信されるFMパルスの波形図、(c)はFMパルス変調された搬送波の波形図、(d)は受信波を示す波形図、(e)はFMパルス参照波を示す波形図、(f)は最も大きい反射が戻ってくるまでの時間Δtを示す、FMパルス参照波と受信波との相関演算後の波形図である。
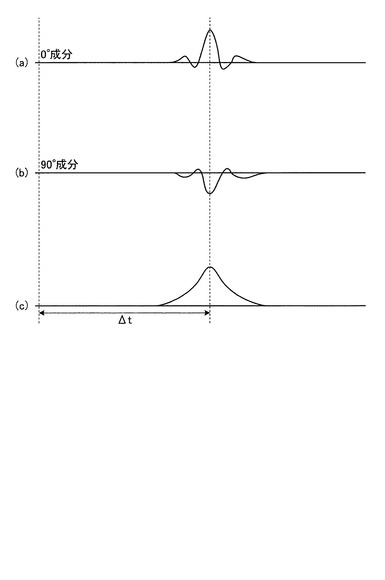
【図5】図5は、相関波形の振幅値を導くための波形図であり、図5(a)は、搬送波の0°成分を示す波形図、(b)搬送波の90°成分を示す波形図、(c)は(a)に示す波形成分と(b)に示す波形成分をA/D変換した後、自乗和を計算し相関波形の振幅値を計算した波形図である。
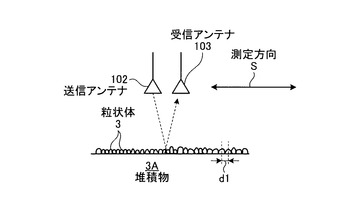
【図6】図6は、堆積物の表面が測定方向Sに平らで、凹凸の突部同士の間隔d1が送信波の波長の1/5以下もしくは送信波の拡がりの1/20以下のである場合の電磁波ビームの反射状態を示す説明図である。
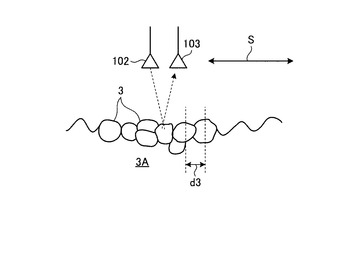
【図7】図7は、粒状体の粒径が十分大きい間隔d3である場合の電磁波ビームの反射状態を示す説明図である。
【図8】図8は、凹凸の突部同士の間隔d2がd1<d2<d3である場合の電磁波ビームの反射状態を示す説明図である。
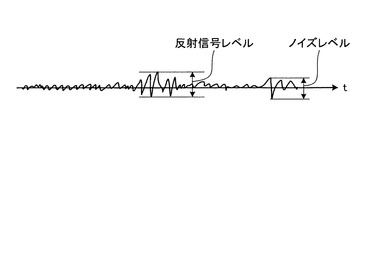
【図9】図9は、測定反射信号レベルが測定したい領域外からの反射や導波管内の定常波、半導体の熱雑音等のノイズレベルと同等もしくはそれ以下の場合を示す波形図である。
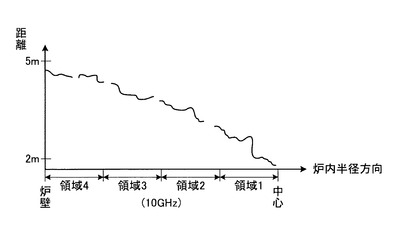
【図10】図10は、周波数10GHz(波長約30mm)のミリ波を使用したときの距離測定結果を示す波形図である。
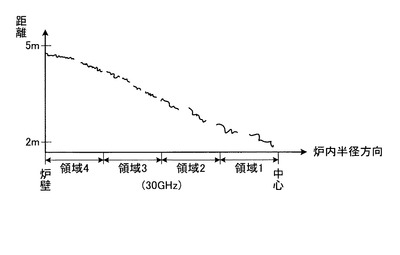
【図11】図11は、周波数30GHz(波長約10mm)のミリ波を使用したときの距離測定結果を示す波形図である。
【図12】図12は、図11の測定結果に基づく相関波形の強度を示す波形図である。
【図13】図13は、粒径分布測定部に含まれる粒径分布推定用の変換テーブルを示す説明図である。
【図14】図14は、電磁波の拡がり角20°のアンテナを使用した場合の測定結果に基づく相関波形の強度を示す波形図である。
【図15】図15は、表面状態計測方法における距離測定工程を示すフローチャートである。
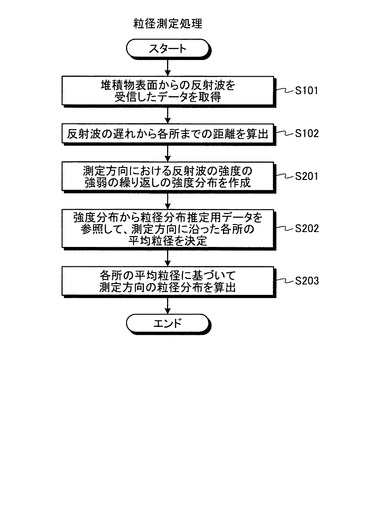
【図16】図16は、表面状態計測方法における粒径測定工程を示すフローチャートである。
【発明を実施するための形態】
【0018】
次に、図面を参照して、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置および表面状態計測方法について説明する。但し、図面は模式的なものであり、各部材の大きさや比率などは現実の物と異なることに留意すべきである。したがって、具体的な寸法などは以下の説明を参酌して判断すべきものである。
【0019】
〔実施の形態〕
この実施の形態に係る粒状体堆積物の表面状態計測装置1は、高炉2内に装入された鉄鉱石やコークスなどの粒状体(装入物)3の堆積物3Aの上部表面状態の測定を行うものである。図1は、高炉2の上部(炉頂部)付近の説明図、図2は表面状態計測装置1を示すブロック図、図3は送受信部を示す回路図である。
【0020】
[高炉の概略構成]
図1に示すように、高炉2の炉体2Aの上部には、円錐形状のガス捕集マンテル2Bがある。ガス捕集マンテル2Bの上部には、シュート用駆動装置5が設置されている。このシュート用駆動装置5には、斜め下方に向けられた装入シュート4が取り付けられている。そして、シュート用駆動装置5を駆動することにより、装入シュート4が旋回および傾斜角度の調節が可能となっている。また、装入シュート4は、シュート用駆動装置5の上方に配置された炉頂バンカー6から鉄鉱石やコークスなどの粒状体3が同時または選択的に供給されるようになっている。
【0021】
装入シュート4から炉体2A内に投入された粒状体3は、炉内に堆積している堆積物3Aの上に落下して転がりながら着地する。図1に示すように、一般的に堆積物3Aの表面の断面形状は、炉壁側が高く、中心軸C側が低くなるように設定されている。ちなみに、炉壁側の高い部分と中心軸C側の低い部分とでは、その高低差が3m〜6m程度に設定されている。
【0022】
すでに述べたように、堆積物3Aの詰まり具合によって高炉2の下部から吹き込まれる熱風の流れ方が変わる。そこで、高炉2を効率よく操業するためには、この詰まり具合を制御する必要がある。そこで、炉体2A上部まで達している堆積物3Aの表面形状(表面高さの分布)と、表面の粒状体3の粒径分布とを測定できる表面状態計測装置1を取り付けて、表面形状が不適当な形状となることを防ぐことができる。
【0023】
[表面状態計測装置]
本実施の形態に係る表面状態計測装置1は、アンテナ部100と、このアンテナ部100で送受信を行わせる送受信部200と、処理部300とを備えて、概略構成されている。送受信部200については、後述する。処理部300は、送受信部200から信号が入力されるA/D変換器301と、A/D変換器301に接続された距離測定部301と、同じくA/D変換器301に接続された、粒径分布推定用の変換テーブル303Aを備えた粒径分布測定部303と、アンテナ部100の走査駆動部106、距離測定部302、および粒径分布測定部303に制御信号を出力する制御部304と、制御部304へ操作指令の入力を行う入力部305と、制御部304から測定結果が出力される出力部306と、を備えている。
【0024】
図1に示すように、アンテナ部100の先端部は、測定方向Sに沿って炉体2Aの中心軸Cと炉壁との間を往復移動できるようになっている。また、アンテナ部100では、電磁波としてミリ波を用いて、堆積物3Aの表面状態について測定方向Sに沿った表面レベルや粒径分布を測定するようになっている。なお、表面レベルの測定とは、直接的には堆積物3Aの表面の炉体2Aにおける高さ位置を求めることであるが、高さ位置の情報から表面の傾斜状態などを求めることも含むものとする。
【0025】
図1に示すように、アンテナ部100は、互いに平行をなす一対の導波路101A、101Bが形成された導波管101と、導波路101Aの先端部に形成された送信部としての送信アンテナ102と、導波路101Bの先端部に形成された受信部としての受信アンテナ103と、導波管101のそれぞれの導波路101A、101Bに連通してパージエアを導入するエアパージ管104と、それぞれの導波路101A、101Bの後端に設けられた同軸導波管変換器105A、105Bと、導波管101を測定方向Sに沿って移動するように駆動する走査駆動部106と、から概略構成されている。
【0026】
導波管101は、炉体2Aの上部に開口したアンテナ挿入口2Cより、先端部側から挿入されている。この導波管101は、高炉2の炉内空間の半径寸法よりも長く、送信アンテナ102および受信アンテナ103が最も中心軸Cに近づいたときに支障がない程度の長さを有している。導波管101は、高炉2内に挿入されて高温に晒されるため、管壁内に冷水路などが形成された図示しない冷却構造を有している。
【0027】
図1に示すように、導波管101は、炉体2A内の堆積物3Aの表面(中心軸Cから炉壁に亘る表面の傾斜面)とほぼ平行をなすような傾斜角に設定されている。なお、堆積物3Aの表面の傾斜度は、操業の状態により異なるが、堆積物3Aの表面の平均的な傾斜度に合わせて導波管101の傾斜角が設定されている。導波管101は、この傾斜度を保った状態で測定方向S(軸方向)に沿って移動される。
【0028】
そして、導波管101の先端部の近傍は、送信アンテナ102および受信アンテナ103が堆積物3Aの表面に対向するように適宜屈曲した構造となっている。このため、送信アンテナ102から照射された電磁波ビームは、堆積物3Aの表面で反射して受信アンテナ103で受信され易くなっている。
【0029】
ここで、それぞれの導波路101A、101Bの先端の送信アンテナ102と受信アンテナ103は、開口部がさらに拡開する形状となっていてもよい。また、本実施の形態では、エアパージ管104は、導波管101を炉体2Aに挿入するときに、パージエアを導波路101A,101Bに導入するようになっている。それぞれの導波路101A、101Bの後端に設けられた一対の同軸導波管変換器105A、105Bには、一端が送受信部200側に接続された同軸ケーブル107がそれぞれ接続されている。これら同軸ケーブル107および上記したエアパージ管104は、可撓性を有する。しかも、これら同軸ケーブル107およびエアパージ管104は、走査駆動部106で駆動されて導波管101が軸方向に移動した場合に、その移動に追従して干渉しないような長さに設定されている。
【0030】
図1に示すように、本実施の形態において、導波管101の外側面には、長手方向に沿ってラック108が一体に設けられている。走査駆動部106は、このラック108に噛み合うピニオン109を備え、このピニオン109を回転駆動することにより、ラック108を介して導波管101を軸方向(測定方向S)にスライドさせるようになっている。なお、図示しないが、走査駆動部106には回転駆動源であるモータやその他の回転制御部などを備えている。
【0031】
次に、送受信部200について説明する。電磁波を使用した距離測定方法では、パターン波形による変調によりS/N向上させることが一般的であり、この実施の形態ではFMパルス方式を用いている。図3に示すように、送受信部200は、主として搬送波発信器201と、この搬送波発信器201に接続された分配器202と、分配器202に接続されたミキサー203と、ミキサー203に接続されたアンプ204と、ミキサー203に接続されたFMパルス発生器205と、受信アンテナ103に接続された可変減衰器206と、この可変減衰器206に接続されたアンプ207、このアンプ207および上記FMパルス発生器205に接続されたFMパルス復調ミキサー208と、このFMパルス復調ミキサー208に接続された分配器209と、上記分配器202に接続されたアンプ210と、アンプ210に接続された直交位相分配器211と、この直交位相分配器211の0°成分側および上記分配器209に接続されたミキサー212と、直交位相分配器211の90°成分側および上記分配器209に接続されたミキサー213などで構成されている。
【0032】
この送受信部200は、制御部304からの指令により、走査駆動部106に連動して測定を開始するようになっている。
【0033】
搬送波発信器201で発信される搬送波(図4(a)参照)は、例えば30GHzである。FMパルス発生器205では、図4(b)に示すような、例えば100〜500MHzのFMパルスを時点t1に発生させる。搬送波発信器201で発信された搬送波は、分配器202を経てミキサー203でFMパルス発生器205からのFMパルスで変調され、図4(c)に示すような変調波形となる。なお、搬送波に対する変調は、正弦波を用いたチャープ波形であってもよい。このようにFMパルスで変調された搬送波は、アンプ204で増幅されて同軸導波管変換器105Aに入力され送信アンテナ102側からミリ波として炉体2A内の堆積物3Aの表面に向けて照射される。
【0034】
受信アンテナ103で受信された堆積物3Aからの反射波は、同軸導波管変換器105Bで電流に変換されて可変減衰器206を経た後、アンプ207で増幅される。この受信波は、図4(d)に示すように、振幅レベルが下がり、ノイズが加わっている。この受信波は、FMパルス復調ミキサー208でFMパルス発生器205から送信されるFMパルス参照波によってスライディング相関が行われる。すなわち、FMパルス参照波は、図4(e)に示すように、受信波の振幅レベルが同じで図4(b)に示した位相変化をもつFMパルスである。このFMパルス参照波は、図4(b)に示したFMパルスが送信された時点t1から、時間的にスライディングさせるように、例えば、このFMパルス参照波パターンを10ps間隔で、500回送出する。この場合、時点t1から50nsまでの間に、ほぼ連続的なFMパルス参照波が送出されたことになる。この50nsは、距離に換算すると送信アンテナ102から受信アンテナ103までの往復距離であり、7.5m(Δtに光の速度c=3×108m/sを乗じた距離)まで測定ができる。そして、図4(d)と図4(e)との相関結果は、図4(f)に示すような、搬送波に近似した波形となる。ここで、時間Δtは、最も大きい反射波が戻ってくるまでの時間を示す。
【0035】
その後、FMパルス復調ミキサー208で復調された信号(図4(f)参照)は、分配器209によって2分配され、一方は、ミキサー212で搬送波の0°成分と混合され(図5(a)参照)、他方は、ミキサー213で搬送波の90°成分と混合される(図5(b)参照)。このような位相検波を行っているのは、FMパルス参照波が、必ずしもFMパルスに同期していないため、相関演算時に位相がずれている可能性があるからである。その後、ミキサー212、213からの各信号は、処理部300に備えられたA/D変換器301でA/D変換され、距離測定部302と粒径分布測定部303とにそれぞれ入力される。
【0036】
距離測定部302では、上述した各直交成分で位相検波された信号の自乗和を計算し、図5(c)に示したような相関波形の振幅値を計算して相関度を計算する。搬送波発信器201側から入力した信号と、受信アンテナ103側から入力した信号との間の時間差(位相差)を求めることで、堆積物3Aの表面レベルを算出することが可能になる。
【0037】
粒径分布推定部303は、送受信部200側から入力された信号に基づいて反射強度分布を算出し、この反射強度分布に対応する、例えば粒径分布推定用の変換テーブル303Aを参照して粒径分布を推定する。すなわち、上記の相関度の計算おける強度分布から、変換テーブル303Aを参照して粒径分布を推定するようになっている。
【0038】
ここで、粒径分布推定用の変換テーブル303Aに格納されるデータについての説明に先駆けて、堆積物3Aの表面の粒状体3の粒径分布が推定できる理由を説明する。
【0039】
一般に、装入物である粒状体3の平均粒径がアンテナ部100で用いる電磁波の波長より小さい場合は、その粒径による凹凸を距離の変化として捉えることは困難である。それは電磁波がある拡がりを持つ波であり、収束する手段を用いても波長程度までしか収束できないからである。ただそれは、堆積物3Aの表面に存在する粒状体3からの反射波の受信を前提とした場合である。
【0040】
図6に示すように、堆積物3Aの表面が測定方向Sに平ら(比較的緻密)で、凹凸の突部同士の間隔d1が、送信波の波長の1/5以下、もしくは送信波の拡がりの1/20以下である場合は、比較的緻密な表面で反射するため反射率は大きくなる。このため、距離測定部302による距離計測が可能である。
【0041】
一方、図7に示すように、凹凸の突部同士の間隔d3が十分大きい場合、すなわち粒状体3の粒径が十分大きい場合は、ひとつの粒状体3の表面から反射が得られる。ところが、図8のようなに凹凸の突部同士の間隔d2が上記d1とd3の中間(d1<d2<d3)である場合、ところどころで反射は返って来るが、どの粒状体3からの反射か特定できないため凹凸の評価(すなわち粒径の推定)までは困難である。
【0042】
ここで、逆に受信アンテナ103に反射波が帰って来ない部分にも注目する。測定方向Sに走査した場合、複数の粒状体3からの反射の干渉により、反射強度に強弱が生じる。強弱の繰り返しは、粒径の分布と相関がある。つまり粒径が大きければ強弱の繰り返し頻度は少なく、粒径が小さければ繰り返し頻度は多くなる。その強度の測定方向Sの強度分布を得ることで、測定方向Sのある範囲の粒径が推測できるようになる。
【0043】
ここで、図4(d)の反射レベルが小さく、図(c)のS/Nが悪い場合を考える。この場合は、図9に示すように、測定反射信号レベルが、測定したい領域外からの反射や導波管101内の定常波、半導体の熱雑音等のノイズレベルと同等もしくはそれ以下の場合である。このときは明確なピークが得られないため距離測定は不可として出力することになる。
【0044】
まず、距離測定のみを主眼として計測している状況を考えてみると、図10のようになる。ここでは、周波数10GHz(波長約30mm)のミリ波を使用している。所々距離データが抜けている部分は、信号レベルが小さい領域である。すなわち、距離測定を精度良く行う目的から、ピーク値の閾値を一定レベル以上に設定するため、それより信号レベルが小さい場合は距離計算不可としている。極端に抜けている部分が多くない限りは、計測可能な部分を拾い出して高さレベルが得られ、堆積物3Aの表面形状を推定できる。
【0045】
ここで、図11に示すように、使用する波長を30GHz(波長約10mm)にすると、抜けている部分が増える。それでも堆積物3Aの表面全体の形状は判断できる。このときの相関波形の強度を調べると図12のような波形になる。半径方向(測定方向S)に領域を例えば領域1〜4の4区間に区切っていくと、強弱の分布が異なることがわかる。これは波長が小さくなることによって、各粒状体3における反射の干渉が起きやすくなったためであり、強弱分布と平均粒径の関係を予め調べておけば、堆積物3Aの表面の半径方向の粒径分布が推測できる。
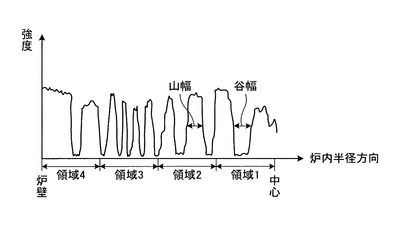
【0046】
相関波形の強弱分布はすなわち、信号強度データの炉内半径方向空間分布である。図12に示すように、強度の強い範囲を山幅、弱い範囲を谷幅とすると、領域1は山幅、谷幅がともに広いことが分かる。これは反射領域が比較的広く、反射の少ない領域も広いことから、粒径としては大きい対象であると考えられる。そこで粒径30mm以上と判定する。領域2では、山幅も谷幅も狭まっており、粒径としては20mm〜30mmと判定される。領域3は、さらに狭まり、粒径は10mm〜20mmと判定される。粒径が10mm以下になると波長以下のため凹凸を認識困難になり、見かけ上平らになり、反射が得られやすくなる。そのため、領域4のように、山幅が広く谷幅が狭い分布になる。すなわち、距離測定に用いた電磁波での分解能以下の粒径の粒状体3の平均粒径を把握することができる。
【0047】
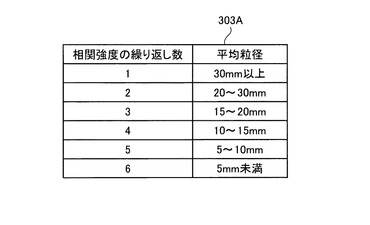
上述の理由から、粒径分布推定用テーブル303Aは、図13に示すように、例えば相関強度の分布と平均粒径との関係を示すデータが格納されたものとすることができる。具体的には、信号強度データの炉内半径方向(測定方向S)における空間分布、例えば山幅および谷幅などを加味したデータ、例えば相関強度の繰り返し数を用いればよい。このようなデータを用いることで、推定粒径もしくは粒径分布などの粒径情報を得ることが可能となる。
【0048】
ところで、アンテナの指向性を高める、例えばパラボラ鏡などを利用して電磁波収束させると、焦点での電磁波の拡がりが波長程度になる。このため、図12の波形のように山谷を分けることができる。
【0049】
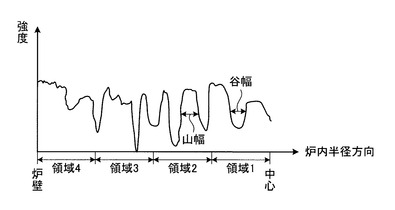
しかし、アンテナの指向性が広い場合には、距離によって拡がり具合が変わるため、計測結果も異なってくる。図14は、電磁波の拡がり角20°のアンテナを使用した場合の強度波形を示す。この場合、伝搬方向の距離を1mとすると拡がりは360mm程度となる。図14では、領域1が粒径30mm以上、領域2が粒径20〜30mmまでは差が有るが、領域3(粒径10〜20mm)、領域4(粒径10mm以下)は区別がつかない。すなわち、図14では、電波の拡がりにより全体的に図12が平均化されたようなデータとなっている。
【0050】
領域1と領域2では、山幅の若干の違いから粒径領域1>粒径領域2と、領域2と領域3とでは谷幅の違いから粒径領域2>粒径領域3と推定できるが、その差が小さく精度としては良くないことが分かる。すなわち、より大きな差が有る粒径分布でないと判定が難しい。距離によって感度が変わるため、指向性が広いアンテナを用いる場合は距離補正が必要である。例えば、上記のような拡がり角20°のアンテナを用いて、図11のような結果が得られた場合、距離が100〜500mmであれば、領域1が粒径30mm以上、領域2が粒径20〜30mm、領域3が10〜20mm、領域4が10mm以下、距離500mm〜1mであれば、領域1が粒径60mm以上、領域2が粒径40〜60mm、領域3が20〜40mm、領域4が20mm以下などのように判定する。
【0051】
このように、拡がりが大きいアンテナは感度を下げるため、複数のアンテナを用いる方法をこの実施の形態に係る表面状態計測装置1に適用することも可能である。具体的には、受信アンテナ103を複数用意し、受信信号の測定方向S強度分布を複数計測する。統計量が増えることにより、より粒径分布の推定精度が向上する。複数アンテナを用いる場合は、合成開口法のように複数アンテナのデータに遅延を設けて、見かけ上の焦点を絞る方法を適用することも可能である。
【0052】
また、この実施の形態に係る表面状態計測装置1においては、電磁波を収束させると感度は向上するが、焦点が短い場合に、焦点からからずれた計測を行う際は精度悪化が懸念されるため、長焦点距離にして焦点深度を深くして用いても勿論よい。
【0053】
さらに、この実施の形態では、高炉2の炉体2A内の堆積物3Aの表面に沿って送信アンテナ102および受信アンテナ103を移動させることができるため、距離による補正は無くても良いが、アンテナが水平に動く、すなわち平均的な距離が変わる場合には、(1)下計測→(2)所定の領域の平均距離を計測(平均距離Lm)→(3)同領域の測定方向Sの強度分布解析(空間周波数Dmm)→(4)平均距離で補正、のようなロジックを用いる。このようなロジックを用いることにより、測定精度を向上できる。
【0054】
このような表面状態計測装置1を高炉2に用いることにより、距離測定用の一種類の電磁波を用いて、堆積物3Aの表面レベルと堆積物表面の粒状体3の粒径分布を同時に把握することができ、高炉2の生産効率化を実現することが可能となる。
【0055】
上述したように、本実施の形態に係る粒状体堆積物の表面状態計測装置1では、送信アンテナ102から照射する電磁波の分解能以下の粒径を持つ粒状体3の平均粒径分布を測定、把握することが可能となる。
【0056】
[表面状態計測方法]
次に、この発明の実施の形態に係る粒状体堆積物の表面状態計測方法について上述した表面状態計測装置1を用いた例で、図1、図15、および図16を用いて説明する。なお、図15は距離測定処理を示すフローチャート、図16は粒径測定処理を示すフローチャートである。
【0057】
(距離測定工程)
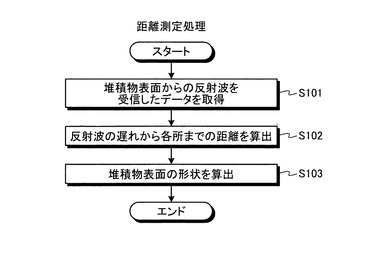
先ず、図1および図15に示すように、導波管101を測定方向Sに移動させて、高炉2内の堆積物3Aの表面に、電磁波ビームを送信アンテナ102から照射しながら受信アンテナ103で反射した電磁波を受信させる(ステップS101)。なお、電磁波ビームは、炉壁から炉体2Aの中心軸Cの間を走査するようにする。このような導波管101を移動させるには、走行駆動部106を駆動させる。このように、炉壁から中心軸Cの間の表面レベルを測定することで全表面の形状を把握することが可能となる。
【0058】
次に、電磁波ビームの送信から受信までの時間間隔から電磁波が照射された堆積物3Aの表面部分までの距離を距離測定部200で測定する(ステップS102)。この測定方法は、FMパルス送信波を参照波としてFMパルス受信波との相関を求めた値の波形から波形のピーク値を求める。このピーク値までの時間Δtが伝播に必要な時間であるため、Δtに光の速度(c=3×108m/s)を乗じると、往復の距離が求められる。従って、求める距離L(m)は、L=(Δt×c)/2となる。表面における各測定位置での距離分布から堆積物3Aの表面形状を算出する(ステップS103)。
【0059】
(粒径分布推定工程)
次に、図16を用いて、このように受信した電磁波の強度の分布から堆積物3Aの表面の粒径分布を推定する工程について説明する。図16に示すように、この工程では、上記した距離測定工程におけるステップS102で堆積物3Aの表面までの距離を算出した後、受信した電磁波から電磁波の強度分布を作成する(ステップS201)。
【0060】
次に、この強度分布に対応する予め作成した粒径分布推定用の変換データを参照して、堆積物3Aの各測定領域を複数の領域のそれぞれの平均粒径を決定する(ステップS202)。続いて、この平均粒径に基づいて測定方向Sの粒径分布を算出すればよい。
【0061】
上述の表面状態計測方法によれば、距離測定に用いる電磁波の反射波のデータを利用して粒径分布の推定が可能となるため、周波数が広帯域のアンテナや高価な設計製作を要する信号処理回路の増加を防止することができる。
【0062】
〔その他の実施の形態〕
以上、この発明の実施の形態について説明したが、上記の実施の形態の開示の一部をなす論述および図面はこの発明を限定するものである理解するべきではない。この開示から当業者には様々な代替実施の形態、実施例および運用技術が明らかとなろう。
【0063】
例えば、上記の実施の形態では、電磁波としてミリ波を適用した例を示したが、粒状体3の粒径によっては、ミリ波以外の波長帯を持つ電磁波を用いても勿論よい。また、この発明においては、パターン波形として疑似ランダム信号などを利用して精度を向上させるようにしても勿論よい。
【0064】
また、上記の実施の形態では、送信アンテナ102と受信アンテナ103とを一体に設けて、堆積物3Aの表面をほぼ平行な測定方向Sに沿って導波管101自体を移動させる構成であるが、炉体2Aの上部炉壁に電磁波を送信する送信アンテナを配置し、炉体2Aの測定用窓と対向する反対側に反射波を受ける受信アンテナを配置して、ミラーを用いて、送信アンテナから照射する電磁波ビームを測定方向Sに沿って走査したり、アレイアンテナを用いて電気的に走査することも本発明の適用範囲である。すなわち、このようにミラーを用いた場合も、送信アンテナからの電磁波ビームの反射波の状態から、反射波の強度分布が得られ、この強度分布から粒径分布を測定する点でこの発明が適用される。
【0065】
さらに、上記の実施の形態では、走査駆動部106のピニオンを回転駆動して、これに噛合するラック109スライドさせて導波管101を移動させるラックアンドピンイオン機構を用いたが、この他にボールねじを回転駆動することで導波管101をスライドさせる機構を用いてもよいし、スライド駆動させるためのピストンシリンダなどのアクチュエータを用いてもよい。
【符号の説明】
【0066】
1 表面状態計測装置
2 高炉
3 粒状体
3A 堆積物
4 装入シュート
100 アンテナ部
101 導波管
101A,101B 導波路
102 送信アンテナ
103 受信アンテナ
105A、105B 同軸導波管変換器
106 走査駆動部
108 ラック
109 ピニオン
200 送受信部
201 送信波発信器
300 処理部
301 A/D変換器
302 距離測定部
303 粒径分布測定部
303A 粒径分布推定用テーブル
304 制御部
305 入力部
306 出力部
【技術分野】
【0001】
この発明は、粒状体の堆積物の表面状態を測定する表面状態計測装置および表面状態計測方法に関する。さらに詳しくは、この発明は、例えば高炉内に装入される鉄鉱石やコークスなどの粒状体が堆積してなる堆積物の表面レベルと、堆積物表面の粒状体の粒径分布と、を同時に求めることができる表面状態計測装置および表面状態計測方法に関する。
【背景技術】
【0002】
通常、高炉内には、炉頂部より鉄鉱石とコークスが交互に装入されて堆積する。これら鉄鉱石やコークスの堆積物の表面は、従来からその中心を通る断面形状がV字状となるように設定されている。すなわち、堆積物の表面レベルは、炉内壁から炉の中心へ向けて高さが漸次低くなるように設定されている。このように堆積物の表面の断面形状をV字状にするには、少なくとも炉内壁から炉の中心までの堆積物の表面レベルを測定することが必要となる。
【0003】
ところで、高炉を効率良く操業するということは、高炉内での還元効率を上げることである。還元効率を上げるためには、高炉内の熱分布を最適に保つ必要がある。そして、熱分布を最適に保つには、外部から高炉内に吹き込まれる熱風の炉内流れを安定化させることが重要である。熱風は、高炉下部から炉上部へ流れるように設定されている。この熱風の流れは、装入物(粒状体)の堆積状態によって影響を受ける。
【0004】
そこで、上述したように、炉内堆積物の表面の断面形状をV字状に設定することが行われている。このように堆積物の表面の断面形状をV字状に設定する理由は、装入物である粒状体の粒径の違いに応じて、粒状体が表層斜面を転がって、半径方向および円周方向の位置のどの辺に着地するかをある程度予想することが可能であるからである。そこで、堆積物表面の傾斜状態を適宜制御することにより、堆積物表面の粒径分布を調整することが可能となる。そして、粒径分布を調整することにより、熱風の流れの制御が可能となる。このような制御を行うことにより熱風の流れを安定化させることができ、燃料費の低減や炉体の長寿命化を図ることができる。
【0005】
従来、堆積物の表面レベルの測定方法としては、電磁波、特にマイクロ波、ミリ波、準ミリ波といった波長が数mm〜100mmの電磁波を使用したものがある。このような電磁波は、粉塵や水蒸気を透過し易いため、高炉内のような悪環境下での計測に利用できる。電磁波を用いた測定方法としては、例えば廃棄物ガス化溶融炉のコークスや廃棄物などの充填物層の表面レベルを電磁波を用いて測定する技術(例えば、特許文献1参照)や、坑深さ測定にマイクロ波を用いた技術(例えば、特許文献2参照)などが知られている。高炉の炉頂から投入される装入物のプロフィール測定方法としては、マイクロ波を炉内装入物の表面に照射して反射波を受信し、送信と受信の時間差から装入物の表面までの距離を測定する技術(例えば、特許文献3参照)が知られている。なお、堆積物の表面レベルの測定方法(距離計測)ではないが、高炉への利用例として、高炉内へ鉄鉱石とコークスの粒径に対してそれぞれ分解能を有する互いに波長の異なる複数の電磁波を選択的に照射し反射強度分布から鉄鉱石とコークスを識別する判別法(例えば、特許文献4参照)が知られている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3235427号公報
【特許文献2】特開2002―202363号公報
【特許文献3】特許第2870346号公報
【特許文献4】特開昭60−77911号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上述したように、炉内での熱風の流れの安定化を図るには、堆積物の表面形状の調整と堆積物表面の粒径分布の管理が重要となる。すなわち、炉内において小径の装入物(粒状体)が詰まっていれば熱風は流れにくくなり、大径の装入物が詰まっていれば熱風は流れ易くなるからである。装入物は炉頂部から落下投入される場合が多く、上述したように、粒状体の着地後の転がりを予想し堆積物の粒径や装入位置を制御している。しかしながら、落下後の実際の粒径分布を監視している訳ではない。このように粒状体の着地後の転がりを予想しても、予想が外れた場合には高炉の効率が低下するなど不調になる場合も生じていた。しかしながら、堆積物の粒径分布を管理することは困難であった。
【0008】
単に装入物の表面レベルや表面形状を計測するだけであれば、上記特許文献1〜4の技術を用いて堆積物表面までの距離を測ればよい。しかし、その装入物の粒径に大きなばらつきがあり、炉の中心から炉内壁に亘る方向(半径方向)の粒径分布を評価しようとすると、上記特許文献4のようにそれぞれの層の粒径に応じた周波数を持つ複数の電磁波を選択する必要があった。一般的に、装入物の粒径は5〜50mm程度であり、複数の周波数を用いたりすれば粒径分布計測は対応可能ではあるが、周波数が広帯域のアンテナや信号処理回路の設計製作が非常に高価になるという問題がある。
【0009】
この発明は、上記課題を解決するためになされたものである。そこで、この発明の目的は、簡易な構成で装入物表面レベルと装入物表面の粒径分布を同時に計測することができる堆積物の表面状態計測装置および表面状態計測方法を提供することにある。
【課題を解決するための手段】
【0010】
上述した課題を解決し、目的を達成するために、この発明の第1の特徴は、粒状体堆積物の表面状態計測装置であって、高炉内の粒状体堆積物の表面に、測定方向に沿って電磁波ビームを走査するように送信する送信部と、この粒状体堆積物の表面から反射した電磁波を受信する受信部と、送信部の送信から受信部の受信までの時間差から電磁波ビームが照射された表面までの距離を測定する距離測定部と、受信アンテナで受信した電磁波の強度の測定方向に対する分布から粒状体堆積物の表面の粒径分布を推定する粒径分布推定部と、を備えたことを要旨とする。
【0011】
また、この発明の第1の特徴に係る表面状態計測装置において、送信部と受信部は一体的に設けられ、これら送信部と受信部を、粒状体堆積物の表面に対向させた状態で測定方向に沿って走査駆動する走査駆動部を備えた構成とすることが好ましい。
【0012】
さらに、この発明の第1の特徴に係る表面状態計測装置において、測定方向は、高炉内の内壁部と中心軸との間を結ぶ方向であることが好ましく、さらに、高炉内の堆積物表面の平均的な傾斜面と平行をなすことがより好ましい。
【0013】
この発明の第2の特徴は、粒状体堆積物の表面状態計測方法であって、高炉内の粒状体堆積物の表面に、電磁波ビームを測定方向に沿って走査しながら照射させ、粒状体堆積物の表面で反射した電磁波を受信して、電磁波ビームの送信から受信までの時間差から電磁波が照射された表面までの距離を測定する距離測定工程と、距離測定工程で受信した電磁波の強度の前記測定方向に対する分布から粒状体堆積物の表面の粒径分布を推定する粒径分布推定工程と、を含むことを要旨とする。
【0014】
この第2の特徴において、粒径分布推定工程では、受信した電磁波の強度の測定方向に対する分布に対応する粒径分布推定用データを参照して、粒状体堆積物の表面の粒径分布を推定してもよい。
【発明の効果】
【0015】
この発明によれば、距離測定に用いる単一波長(一種類の)の電磁波の受信状況から装入物表面レベルと装入物表面の粒径分布を同時に計測することができ、高炉の生産効率化を実現することができる。
【0016】
また、この発明によれば、距離測定に用いた電磁波での分解能以下の粒径の粒状体が混じる堆積物表面の粒径分布を把握することができる。したがって、周波数が広帯域のアンテナや高価な設計製作を要する信号処理回路を増加させることがない。したがって、この発明によれば、低コストで測定精度の高い粒状体堆積物の表面状態計測装置を実現できる。
【図面の簡単な説明】
【0017】
【図1】図1は、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置を高炉上部に設置した構造を示す説明図である。
【図2】図2は、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置を示すブロック図である。
【図3】図3は、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置における送受信部を示す回路図である。
【図4】図4は、表面状態を検出するための各波形を示す図であり、図4(a)は送受信部の搬送波発信器から発信させる搬送波の波形図、(b)はFMパルス発生器で発信されるFMパルスの波形図、(c)はFMパルス変調された搬送波の波形図、(d)は受信波を示す波形図、(e)はFMパルス参照波を示す波形図、(f)は最も大きい反射が戻ってくるまでの時間Δtを示す、FMパルス参照波と受信波との相関演算後の波形図である。
【図5】図5は、相関波形の振幅値を導くための波形図であり、図5(a)は、搬送波の0°成分を示す波形図、(b)搬送波の90°成分を示す波形図、(c)は(a)に示す波形成分と(b)に示す波形成分をA/D変換した後、自乗和を計算し相関波形の振幅値を計算した波形図である。
【図6】図6は、堆積物の表面が測定方向Sに平らで、凹凸の突部同士の間隔d1が送信波の波長の1/5以下もしくは送信波の拡がりの1/20以下のである場合の電磁波ビームの反射状態を示す説明図である。
【図7】図7は、粒状体の粒径が十分大きい間隔d3である場合の電磁波ビームの反射状態を示す説明図である。
【図8】図8は、凹凸の突部同士の間隔d2がd1<d2<d3である場合の電磁波ビームの反射状態を示す説明図である。
【図9】図9は、測定反射信号レベルが測定したい領域外からの反射や導波管内の定常波、半導体の熱雑音等のノイズレベルと同等もしくはそれ以下の場合を示す波形図である。
【図10】図10は、周波数10GHz(波長約30mm)のミリ波を使用したときの距離測定結果を示す波形図である。
【図11】図11は、周波数30GHz(波長約10mm)のミリ波を使用したときの距離測定結果を示す波形図である。
【図12】図12は、図11の測定結果に基づく相関波形の強度を示す波形図である。
【図13】図13は、粒径分布測定部に含まれる粒径分布推定用の変換テーブルを示す説明図である。
【図14】図14は、電磁波の拡がり角20°のアンテナを使用した場合の測定結果に基づく相関波形の強度を示す波形図である。
【図15】図15は、表面状態計測方法における距離測定工程を示すフローチャートである。
【図16】図16は、表面状態計測方法における粒径測定工程を示すフローチャートである。
【発明を実施するための形態】
【0018】
次に、図面を参照して、この発明の実施の形態に係る粒状体堆積物の表面状態計測装置および表面状態計測方法について説明する。但し、図面は模式的なものであり、各部材の大きさや比率などは現実の物と異なることに留意すべきである。したがって、具体的な寸法などは以下の説明を参酌して判断すべきものである。
【0019】
〔実施の形態〕
この実施の形態に係る粒状体堆積物の表面状態計測装置1は、高炉2内に装入された鉄鉱石やコークスなどの粒状体(装入物)3の堆積物3Aの上部表面状態の測定を行うものである。図1は、高炉2の上部(炉頂部)付近の説明図、図2は表面状態計測装置1を示すブロック図、図3は送受信部を示す回路図である。
【0020】
[高炉の概略構成]
図1に示すように、高炉2の炉体2Aの上部には、円錐形状のガス捕集マンテル2Bがある。ガス捕集マンテル2Bの上部には、シュート用駆動装置5が設置されている。このシュート用駆動装置5には、斜め下方に向けられた装入シュート4が取り付けられている。そして、シュート用駆動装置5を駆動することにより、装入シュート4が旋回および傾斜角度の調節が可能となっている。また、装入シュート4は、シュート用駆動装置5の上方に配置された炉頂バンカー6から鉄鉱石やコークスなどの粒状体3が同時または選択的に供給されるようになっている。
【0021】
装入シュート4から炉体2A内に投入された粒状体3は、炉内に堆積している堆積物3Aの上に落下して転がりながら着地する。図1に示すように、一般的に堆積物3Aの表面の断面形状は、炉壁側が高く、中心軸C側が低くなるように設定されている。ちなみに、炉壁側の高い部分と中心軸C側の低い部分とでは、その高低差が3m〜6m程度に設定されている。
【0022】
すでに述べたように、堆積物3Aの詰まり具合によって高炉2の下部から吹き込まれる熱風の流れ方が変わる。そこで、高炉2を効率よく操業するためには、この詰まり具合を制御する必要がある。そこで、炉体2A上部まで達している堆積物3Aの表面形状(表面高さの分布)と、表面の粒状体3の粒径分布とを測定できる表面状態計測装置1を取り付けて、表面形状が不適当な形状となることを防ぐことができる。
【0023】
[表面状態計測装置]
本実施の形態に係る表面状態計測装置1は、アンテナ部100と、このアンテナ部100で送受信を行わせる送受信部200と、処理部300とを備えて、概略構成されている。送受信部200については、後述する。処理部300は、送受信部200から信号が入力されるA/D変換器301と、A/D変換器301に接続された距離測定部301と、同じくA/D変換器301に接続された、粒径分布推定用の変換テーブル303Aを備えた粒径分布測定部303と、アンテナ部100の走査駆動部106、距離測定部302、および粒径分布測定部303に制御信号を出力する制御部304と、制御部304へ操作指令の入力を行う入力部305と、制御部304から測定結果が出力される出力部306と、を備えている。
【0024】
図1に示すように、アンテナ部100の先端部は、測定方向Sに沿って炉体2Aの中心軸Cと炉壁との間を往復移動できるようになっている。また、アンテナ部100では、電磁波としてミリ波を用いて、堆積物3Aの表面状態について測定方向Sに沿った表面レベルや粒径分布を測定するようになっている。なお、表面レベルの測定とは、直接的には堆積物3Aの表面の炉体2Aにおける高さ位置を求めることであるが、高さ位置の情報から表面の傾斜状態などを求めることも含むものとする。
【0025】
図1に示すように、アンテナ部100は、互いに平行をなす一対の導波路101A、101Bが形成された導波管101と、導波路101Aの先端部に形成された送信部としての送信アンテナ102と、導波路101Bの先端部に形成された受信部としての受信アンテナ103と、導波管101のそれぞれの導波路101A、101Bに連通してパージエアを導入するエアパージ管104と、それぞれの導波路101A、101Bの後端に設けられた同軸導波管変換器105A、105Bと、導波管101を測定方向Sに沿って移動するように駆動する走査駆動部106と、から概略構成されている。
【0026】
導波管101は、炉体2Aの上部に開口したアンテナ挿入口2Cより、先端部側から挿入されている。この導波管101は、高炉2の炉内空間の半径寸法よりも長く、送信アンテナ102および受信アンテナ103が最も中心軸Cに近づいたときに支障がない程度の長さを有している。導波管101は、高炉2内に挿入されて高温に晒されるため、管壁内に冷水路などが形成された図示しない冷却構造を有している。
【0027】
図1に示すように、導波管101は、炉体2A内の堆積物3Aの表面(中心軸Cから炉壁に亘る表面の傾斜面)とほぼ平行をなすような傾斜角に設定されている。なお、堆積物3Aの表面の傾斜度は、操業の状態により異なるが、堆積物3Aの表面の平均的な傾斜度に合わせて導波管101の傾斜角が設定されている。導波管101は、この傾斜度を保った状態で測定方向S(軸方向)に沿って移動される。
【0028】
そして、導波管101の先端部の近傍は、送信アンテナ102および受信アンテナ103が堆積物3Aの表面に対向するように適宜屈曲した構造となっている。このため、送信アンテナ102から照射された電磁波ビームは、堆積物3Aの表面で反射して受信アンテナ103で受信され易くなっている。
【0029】
ここで、それぞれの導波路101A、101Bの先端の送信アンテナ102と受信アンテナ103は、開口部がさらに拡開する形状となっていてもよい。また、本実施の形態では、エアパージ管104は、導波管101を炉体2Aに挿入するときに、パージエアを導波路101A,101Bに導入するようになっている。それぞれの導波路101A、101Bの後端に設けられた一対の同軸導波管変換器105A、105Bには、一端が送受信部200側に接続された同軸ケーブル107がそれぞれ接続されている。これら同軸ケーブル107および上記したエアパージ管104は、可撓性を有する。しかも、これら同軸ケーブル107およびエアパージ管104は、走査駆動部106で駆動されて導波管101が軸方向に移動した場合に、その移動に追従して干渉しないような長さに設定されている。
【0030】
図1に示すように、本実施の形態において、導波管101の外側面には、長手方向に沿ってラック108が一体に設けられている。走査駆動部106は、このラック108に噛み合うピニオン109を備え、このピニオン109を回転駆動することにより、ラック108を介して導波管101を軸方向(測定方向S)にスライドさせるようになっている。なお、図示しないが、走査駆動部106には回転駆動源であるモータやその他の回転制御部などを備えている。
【0031】
次に、送受信部200について説明する。電磁波を使用した距離測定方法では、パターン波形による変調によりS/N向上させることが一般的であり、この実施の形態ではFMパルス方式を用いている。図3に示すように、送受信部200は、主として搬送波発信器201と、この搬送波発信器201に接続された分配器202と、分配器202に接続されたミキサー203と、ミキサー203に接続されたアンプ204と、ミキサー203に接続されたFMパルス発生器205と、受信アンテナ103に接続された可変減衰器206と、この可変減衰器206に接続されたアンプ207、このアンプ207および上記FMパルス発生器205に接続されたFMパルス復調ミキサー208と、このFMパルス復調ミキサー208に接続された分配器209と、上記分配器202に接続されたアンプ210と、アンプ210に接続された直交位相分配器211と、この直交位相分配器211の0°成分側および上記分配器209に接続されたミキサー212と、直交位相分配器211の90°成分側および上記分配器209に接続されたミキサー213などで構成されている。
【0032】
この送受信部200は、制御部304からの指令により、走査駆動部106に連動して測定を開始するようになっている。
【0033】
搬送波発信器201で発信される搬送波(図4(a)参照)は、例えば30GHzである。FMパルス発生器205では、図4(b)に示すような、例えば100〜500MHzのFMパルスを時点t1に発生させる。搬送波発信器201で発信された搬送波は、分配器202を経てミキサー203でFMパルス発生器205からのFMパルスで変調され、図4(c)に示すような変調波形となる。なお、搬送波に対する変調は、正弦波を用いたチャープ波形であってもよい。このようにFMパルスで変調された搬送波は、アンプ204で増幅されて同軸導波管変換器105Aに入力され送信アンテナ102側からミリ波として炉体2A内の堆積物3Aの表面に向けて照射される。
【0034】
受信アンテナ103で受信された堆積物3Aからの反射波は、同軸導波管変換器105Bで電流に変換されて可変減衰器206を経た後、アンプ207で増幅される。この受信波は、図4(d)に示すように、振幅レベルが下がり、ノイズが加わっている。この受信波は、FMパルス復調ミキサー208でFMパルス発生器205から送信されるFMパルス参照波によってスライディング相関が行われる。すなわち、FMパルス参照波は、図4(e)に示すように、受信波の振幅レベルが同じで図4(b)に示した位相変化をもつFMパルスである。このFMパルス参照波は、図4(b)に示したFMパルスが送信された時点t1から、時間的にスライディングさせるように、例えば、このFMパルス参照波パターンを10ps間隔で、500回送出する。この場合、時点t1から50nsまでの間に、ほぼ連続的なFMパルス参照波が送出されたことになる。この50nsは、距離に換算すると送信アンテナ102から受信アンテナ103までの往復距離であり、7.5m(Δtに光の速度c=3×108m/sを乗じた距離)まで測定ができる。そして、図4(d)と図4(e)との相関結果は、図4(f)に示すような、搬送波に近似した波形となる。ここで、時間Δtは、最も大きい反射波が戻ってくるまでの時間を示す。
【0035】
その後、FMパルス復調ミキサー208で復調された信号(図4(f)参照)は、分配器209によって2分配され、一方は、ミキサー212で搬送波の0°成分と混合され(図5(a)参照)、他方は、ミキサー213で搬送波の90°成分と混合される(図5(b)参照)。このような位相検波を行っているのは、FMパルス参照波が、必ずしもFMパルスに同期していないため、相関演算時に位相がずれている可能性があるからである。その後、ミキサー212、213からの各信号は、処理部300に備えられたA/D変換器301でA/D変換され、距離測定部302と粒径分布測定部303とにそれぞれ入力される。
【0036】
距離測定部302では、上述した各直交成分で位相検波された信号の自乗和を計算し、図5(c)に示したような相関波形の振幅値を計算して相関度を計算する。搬送波発信器201側から入力した信号と、受信アンテナ103側から入力した信号との間の時間差(位相差)を求めることで、堆積物3Aの表面レベルを算出することが可能になる。
【0037】
粒径分布推定部303は、送受信部200側から入力された信号に基づいて反射強度分布を算出し、この反射強度分布に対応する、例えば粒径分布推定用の変換テーブル303Aを参照して粒径分布を推定する。すなわち、上記の相関度の計算おける強度分布から、変換テーブル303Aを参照して粒径分布を推定するようになっている。
【0038】
ここで、粒径分布推定用の変換テーブル303Aに格納されるデータについての説明に先駆けて、堆積物3Aの表面の粒状体3の粒径分布が推定できる理由を説明する。
【0039】
一般に、装入物である粒状体3の平均粒径がアンテナ部100で用いる電磁波の波長より小さい場合は、その粒径による凹凸を距離の変化として捉えることは困難である。それは電磁波がある拡がりを持つ波であり、収束する手段を用いても波長程度までしか収束できないからである。ただそれは、堆積物3Aの表面に存在する粒状体3からの反射波の受信を前提とした場合である。
【0040】
図6に示すように、堆積物3Aの表面が測定方向Sに平ら(比較的緻密)で、凹凸の突部同士の間隔d1が、送信波の波長の1/5以下、もしくは送信波の拡がりの1/20以下である場合は、比較的緻密な表面で反射するため反射率は大きくなる。このため、距離測定部302による距離計測が可能である。
【0041】
一方、図7に示すように、凹凸の突部同士の間隔d3が十分大きい場合、すなわち粒状体3の粒径が十分大きい場合は、ひとつの粒状体3の表面から反射が得られる。ところが、図8のようなに凹凸の突部同士の間隔d2が上記d1とd3の中間(d1<d2<d3)である場合、ところどころで反射は返って来るが、どの粒状体3からの反射か特定できないため凹凸の評価(すなわち粒径の推定)までは困難である。
【0042】
ここで、逆に受信アンテナ103に反射波が帰って来ない部分にも注目する。測定方向Sに走査した場合、複数の粒状体3からの反射の干渉により、反射強度に強弱が生じる。強弱の繰り返しは、粒径の分布と相関がある。つまり粒径が大きければ強弱の繰り返し頻度は少なく、粒径が小さければ繰り返し頻度は多くなる。その強度の測定方向Sの強度分布を得ることで、測定方向Sのある範囲の粒径が推測できるようになる。
【0043】
ここで、図4(d)の反射レベルが小さく、図(c)のS/Nが悪い場合を考える。この場合は、図9に示すように、測定反射信号レベルが、測定したい領域外からの反射や導波管101内の定常波、半導体の熱雑音等のノイズレベルと同等もしくはそれ以下の場合である。このときは明確なピークが得られないため距離測定は不可として出力することになる。
【0044】
まず、距離測定のみを主眼として計測している状況を考えてみると、図10のようになる。ここでは、周波数10GHz(波長約30mm)のミリ波を使用している。所々距離データが抜けている部分は、信号レベルが小さい領域である。すなわち、距離測定を精度良く行う目的から、ピーク値の閾値を一定レベル以上に設定するため、それより信号レベルが小さい場合は距離計算不可としている。極端に抜けている部分が多くない限りは、計測可能な部分を拾い出して高さレベルが得られ、堆積物3Aの表面形状を推定できる。
【0045】
ここで、図11に示すように、使用する波長を30GHz(波長約10mm)にすると、抜けている部分が増える。それでも堆積物3Aの表面全体の形状は判断できる。このときの相関波形の強度を調べると図12のような波形になる。半径方向(測定方向S)に領域を例えば領域1〜4の4区間に区切っていくと、強弱の分布が異なることがわかる。これは波長が小さくなることによって、各粒状体3における反射の干渉が起きやすくなったためであり、強弱分布と平均粒径の関係を予め調べておけば、堆積物3Aの表面の半径方向の粒径分布が推測できる。
【0046】
相関波形の強弱分布はすなわち、信号強度データの炉内半径方向空間分布である。図12に示すように、強度の強い範囲を山幅、弱い範囲を谷幅とすると、領域1は山幅、谷幅がともに広いことが分かる。これは反射領域が比較的広く、反射の少ない領域も広いことから、粒径としては大きい対象であると考えられる。そこで粒径30mm以上と判定する。領域2では、山幅も谷幅も狭まっており、粒径としては20mm〜30mmと判定される。領域3は、さらに狭まり、粒径は10mm〜20mmと判定される。粒径が10mm以下になると波長以下のため凹凸を認識困難になり、見かけ上平らになり、反射が得られやすくなる。そのため、領域4のように、山幅が広く谷幅が狭い分布になる。すなわち、距離測定に用いた電磁波での分解能以下の粒径の粒状体3の平均粒径を把握することができる。
【0047】
上述の理由から、粒径分布推定用テーブル303Aは、図13に示すように、例えば相関強度の分布と平均粒径との関係を示すデータが格納されたものとすることができる。具体的には、信号強度データの炉内半径方向(測定方向S)における空間分布、例えば山幅および谷幅などを加味したデータ、例えば相関強度の繰り返し数を用いればよい。このようなデータを用いることで、推定粒径もしくは粒径分布などの粒径情報を得ることが可能となる。
【0048】
ところで、アンテナの指向性を高める、例えばパラボラ鏡などを利用して電磁波収束させると、焦点での電磁波の拡がりが波長程度になる。このため、図12の波形のように山谷を分けることができる。
【0049】
しかし、アンテナの指向性が広い場合には、距離によって拡がり具合が変わるため、計測結果も異なってくる。図14は、電磁波の拡がり角20°のアンテナを使用した場合の強度波形を示す。この場合、伝搬方向の距離を1mとすると拡がりは360mm程度となる。図14では、領域1が粒径30mm以上、領域2が粒径20〜30mmまでは差が有るが、領域3(粒径10〜20mm)、領域4(粒径10mm以下)は区別がつかない。すなわち、図14では、電波の拡がりにより全体的に図12が平均化されたようなデータとなっている。
【0050】
領域1と領域2では、山幅の若干の違いから粒径領域1>粒径領域2と、領域2と領域3とでは谷幅の違いから粒径領域2>粒径領域3と推定できるが、その差が小さく精度としては良くないことが分かる。すなわち、より大きな差が有る粒径分布でないと判定が難しい。距離によって感度が変わるため、指向性が広いアンテナを用いる場合は距離補正が必要である。例えば、上記のような拡がり角20°のアンテナを用いて、図11のような結果が得られた場合、距離が100〜500mmであれば、領域1が粒径30mm以上、領域2が粒径20〜30mm、領域3が10〜20mm、領域4が10mm以下、距離500mm〜1mであれば、領域1が粒径60mm以上、領域2が粒径40〜60mm、領域3が20〜40mm、領域4が20mm以下などのように判定する。
【0051】
このように、拡がりが大きいアンテナは感度を下げるため、複数のアンテナを用いる方法をこの実施の形態に係る表面状態計測装置1に適用することも可能である。具体的には、受信アンテナ103を複数用意し、受信信号の測定方向S強度分布を複数計測する。統計量が増えることにより、より粒径分布の推定精度が向上する。複数アンテナを用いる場合は、合成開口法のように複数アンテナのデータに遅延を設けて、見かけ上の焦点を絞る方法を適用することも可能である。
【0052】
また、この実施の形態に係る表面状態計測装置1においては、電磁波を収束させると感度は向上するが、焦点が短い場合に、焦点からからずれた計測を行う際は精度悪化が懸念されるため、長焦点距離にして焦点深度を深くして用いても勿論よい。
【0053】
さらに、この実施の形態では、高炉2の炉体2A内の堆積物3Aの表面に沿って送信アンテナ102および受信アンテナ103を移動させることができるため、距離による補正は無くても良いが、アンテナが水平に動く、すなわち平均的な距離が変わる場合には、(1)下計測→(2)所定の領域の平均距離を計測(平均距離Lm)→(3)同領域の測定方向Sの強度分布解析(空間周波数Dmm)→(4)平均距離で補正、のようなロジックを用いる。このようなロジックを用いることにより、測定精度を向上できる。
【0054】
このような表面状態計測装置1を高炉2に用いることにより、距離測定用の一種類の電磁波を用いて、堆積物3Aの表面レベルと堆積物表面の粒状体3の粒径分布を同時に把握することができ、高炉2の生産効率化を実現することが可能となる。
【0055】
上述したように、本実施の形態に係る粒状体堆積物の表面状態計測装置1では、送信アンテナ102から照射する電磁波の分解能以下の粒径を持つ粒状体3の平均粒径分布を測定、把握することが可能となる。
【0056】
[表面状態計測方法]
次に、この発明の実施の形態に係る粒状体堆積物の表面状態計測方法について上述した表面状態計測装置1を用いた例で、図1、図15、および図16を用いて説明する。なお、図15は距離測定処理を示すフローチャート、図16は粒径測定処理を示すフローチャートである。
【0057】
(距離測定工程)
先ず、図1および図15に示すように、導波管101を測定方向Sに移動させて、高炉2内の堆積物3Aの表面に、電磁波ビームを送信アンテナ102から照射しながら受信アンテナ103で反射した電磁波を受信させる(ステップS101)。なお、電磁波ビームは、炉壁から炉体2Aの中心軸Cの間を走査するようにする。このような導波管101を移動させるには、走行駆動部106を駆動させる。このように、炉壁から中心軸Cの間の表面レベルを測定することで全表面の形状を把握することが可能となる。
【0058】
次に、電磁波ビームの送信から受信までの時間間隔から電磁波が照射された堆積物3Aの表面部分までの距離を距離測定部200で測定する(ステップS102)。この測定方法は、FMパルス送信波を参照波としてFMパルス受信波との相関を求めた値の波形から波形のピーク値を求める。このピーク値までの時間Δtが伝播に必要な時間であるため、Δtに光の速度(c=3×108m/s)を乗じると、往復の距離が求められる。従って、求める距離L(m)は、L=(Δt×c)/2となる。表面における各測定位置での距離分布から堆積物3Aの表面形状を算出する(ステップS103)。
【0059】
(粒径分布推定工程)
次に、図16を用いて、このように受信した電磁波の強度の分布から堆積物3Aの表面の粒径分布を推定する工程について説明する。図16に示すように、この工程では、上記した距離測定工程におけるステップS102で堆積物3Aの表面までの距離を算出した後、受信した電磁波から電磁波の強度分布を作成する(ステップS201)。
【0060】
次に、この強度分布に対応する予め作成した粒径分布推定用の変換データを参照して、堆積物3Aの各測定領域を複数の領域のそれぞれの平均粒径を決定する(ステップS202)。続いて、この平均粒径に基づいて測定方向Sの粒径分布を算出すればよい。
【0061】
上述の表面状態計測方法によれば、距離測定に用いる電磁波の反射波のデータを利用して粒径分布の推定が可能となるため、周波数が広帯域のアンテナや高価な設計製作を要する信号処理回路の増加を防止することができる。
【0062】
〔その他の実施の形態〕
以上、この発明の実施の形態について説明したが、上記の実施の形態の開示の一部をなす論述および図面はこの発明を限定するものである理解するべきではない。この開示から当業者には様々な代替実施の形態、実施例および運用技術が明らかとなろう。
【0063】
例えば、上記の実施の形態では、電磁波としてミリ波を適用した例を示したが、粒状体3の粒径によっては、ミリ波以外の波長帯を持つ電磁波を用いても勿論よい。また、この発明においては、パターン波形として疑似ランダム信号などを利用して精度を向上させるようにしても勿論よい。
【0064】
また、上記の実施の形態では、送信アンテナ102と受信アンテナ103とを一体に設けて、堆積物3Aの表面をほぼ平行な測定方向Sに沿って導波管101自体を移動させる構成であるが、炉体2Aの上部炉壁に電磁波を送信する送信アンテナを配置し、炉体2Aの測定用窓と対向する反対側に反射波を受ける受信アンテナを配置して、ミラーを用いて、送信アンテナから照射する電磁波ビームを測定方向Sに沿って走査したり、アレイアンテナを用いて電気的に走査することも本発明の適用範囲である。すなわち、このようにミラーを用いた場合も、送信アンテナからの電磁波ビームの反射波の状態から、反射波の強度分布が得られ、この強度分布から粒径分布を測定する点でこの発明が適用される。
【0065】
さらに、上記の実施の形態では、走査駆動部106のピニオンを回転駆動して、これに噛合するラック109スライドさせて導波管101を移動させるラックアンドピンイオン機構を用いたが、この他にボールねじを回転駆動することで導波管101をスライドさせる機構を用いてもよいし、スライド駆動させるためのピストンシリンダなどのアクチュエータを用いてもよい。
【符号の説明】
【0066】
1 表面状態計測装置
2 高炉
3 粒状体
3A 堆積物
4 装入シュート
100 アンテナ部
101 導波管
101A,101B 導波路
102 送信アンテナ
103 受信アンテナ
105A、105B 同軸導波管変換器
106 走査駆動部
108 ラック
109 ピニオン
200 送受信部
201 送信波発信器
300 処理部
301 A/D変換器
302 距離測定部
303 粒径分布測定部
303A 粒径分布推定用テーブル
304 制御部
305 入力部
306 出力部
【特許請求の範囲】
【請求項1】
高炉内の粒状体堆積物の表面に、測定方向に沿って電磁波ビームを走査するように送信する送信部と、
前記粒状体堆積物の表面から反射した電磁波を受信する受信部と、
前記送信部の送信から前記受信部の受信までの時間差から電磁波ビームが照射された表面までの距離を測定する距離測定部と、
前記受信アンテナで受信した電磁波の強度の前記測定方向に対する分布から前記粒状体堆積物の表面の粒径分布を推定する粒径分布推定部と、
を備えたことを特徴とする粒状体堆積物の表面形状計測装置。
【請求項2】
前記送信部と前記受信部は一体的に設けられ、これら前記送信部と前記受信部を、粒状体堆積物の表面に対向させた状態で前記測定方向に沿って走査駆動する走査駆動部を備えたことを特徴とする請求項1に記載の粒状体堆積物の表面状態計測装置。
【請求項3】
前記測定方向は、高炉内の内壁部と中心軸との間を結ぶ方向であることを特徴とする請求項1または2に記載の粒状体堆積物の表面状態計測装置。
【請求項4】
高炉内の粒状体堆積物の表面に、電磁波ビームを測定方向に沿って走査しながら照射させ、前記粒状体堆積物の表面で反射した電磁波を受信して、電磁波ビームの送信から受信までの時間差から電磁波が照射された表面までの距離を測定する距離測定工程と、
前記距離測定工程で受信した電磁波の強度の前記測定方向に対する分布から前記粒状体堆積物の表面の粒径分布を推定する粒径分布推定工程と、
を含むことを特徴とする粒状体堆積物の表面状態計測方法。
【請求項5】
前記粒径分布推定工程では、受信した電磁波の強度の前記測定方向に対する分布に対応する粒径分布推定用データを参照して、粒状体堆積物の表面の粒径分布を推定することを特徴とする請求項4に記載の粒状体堆積物の表面状態計測方法。
【請求項1】
高炉内の粒状体堆積物の表面に、測定方向に沿って電磁波ビームを走査するように送信する送信部と、
前記粒状体堆積物の表面から反射した電磁波を受信する受信部と、
前記送信部の送信から前記受信部の受信までの時間差から電磁波ビームが照射された表面までの距離を測定する距離測定部と、
前記受信アンテナで受信した電磁波の強度の前記測定方向に対する分布から前記粒状体堆積物の表面の粒径分布を推定する粒径分布推定部と、
を備えたことを特徴とする粒状体堆積物の表面形状計測装置。
【請求項2】
前記送信部と前記受信部は一体的に設けられ、これら前記送信部と前記受信部を、粒状体堆積物の表面に対向させた状態で前記測定方向に沿って走査駆動する走査駆動部を備えたことを特徴とする請求項1に記載の粒状体堆積物の表面状態計測装置。
【請求項3】
前記測定方向は、高炉内の内壁部と中心軸との間を結ぶ方向であることを特徴とする請求項1または2に記載の粒状体堆積物の表面状態計測装置。
【請求項4】
高炉内の粒状体堆積物の表面に、電磁波ビームを測定方向に沿って走査しながら照射させ、前記粒状体堆積物の表面で反射した電磁波を受信して、電磁波ビームの送信から受信までの時間差から電磁波が照射された表面までの距離を測定する距離測定工程と、
前記距離測定工程で受信した電磁波の強度の前記測定方向に対する分布から前記粒状体堆積物の表面の粒径分布を推定する粒径分布推定工程と、
を含むことを特徴とする粒状体堆積物の表面状態計測方法。
【請求項5】
前記粒径分布推定工程では、受信した電磁波の強度の前記測定方向に対する分布に対応する粒径分布推定用データを参照して、粒状体堆積物の表面の粒径分布を推定することを特徴とする請求項4に記載の粒状体堆積物の表面状態計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−191073(P2011−191073A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−55114(P2010−55114)
【出願日】平成22年3月11日(2010.3.11)
【出願人】(000001258)JFEスチール株式会社 (8,589)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月11日(2010.3.11)
【出願人】(000001258)JFEスチール株式会社 (8,589)
【Fターム(参考)】
[ Back to top ]