
粘弾性特性計測方法および粘弾性特性計測装置
【課題】新規な粘弾性特性計測装置を提供することを目的とする。
【解決手段】粘弾性特性計測装置は、筋の粘弾性特性を計測する装置である。この粘弾性特性計測装置は、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有している。ここで、筋は、ヒト、サル、ウマ、マグロなど動物の筋であることが好ましい。また、粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスであることが好ましい。また、粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率であることが好ましい。また、筋力は、等尺性収縮における筋力であることが好ましい。また、駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激であることが好ましい。
【解決手段】粘弾性特性計測装置は、筋の粘弾性特性を計測する装置である。この粘弾性特性計測装置は、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有している。ここで、筋は、ヒト、サル、ウマ、マグロなど動物の筋であることが好ましい。また、粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスであることが好ましい。また、粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率であることが好ましい。また、筋力は、等尺性収縮における筋力であることが好ましい。また、駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激であることが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、新規な粘弾性特性計測方法に関する。また、本発明は、前記粘弾性特性計測方法を実現する新規な粘弾性特性計測装置に関する。
【背景技術】
【0002】
筋の変形の力学的特性を定量的に調べることは、これがヒトの運動機能を直接的に担う器官であることから、医療や福祉、スポーツ工学の分野などでの科学的な評価において非常に重要である。変形の力学的な特性評価方法は、工学分野の材料試験法では引張試験が標準的であるが、ヒトへの適用を考える場合には低侵襲性が要求される。これに関して発明者は、球圧子押込試験という低侵襲な材料試験法を基礎とすることによって、ヤング率(Young率)や粘性係数など弾性や粘弾性を同定する手法を確立してきた(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】谷充博、佐久間淳、小笠原誠、触診を模擬した球圧子押込試験によるヒト軟組織のin situ 粘弾性計測、日本機械学会第22回バイオエンジニアリング講演論文集、No.09-55、(2010-1)、p.127。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、発明者は、球圧子押込試験という低侵襲な材料試験法を基礎とすることによって、Young率や粘性係数など弾性や粘弾性を同定する手法を確立してきた。さらに、ヒトの運動における筋の機能的役割を評価する場合には、外力への応答のような作用力に対する受動的な変形特性に加えて、自ら収縮する過程での能動的な変形特性を調べることが重要である。
しかしながら、外力への応答のような作用力に対する受動的な変形特性に加えて、自ら収縮する過程での能動的な変形特性を検討する試みは、まだなされていない。
【0005】
そのため、このような課題を解決する、新規な粘弾性特性計測方法および粘弾性特性計測装置の開発が望まれている。
【0006】
本発明は、このような課題に鑑みてなされたものであり、新規な粘弾性特性計測方法を提供することを目的とする。
また、本発明は、前記粘弾性特性計測方法を実現する新規な粘弾性特性計測装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決し、本発明の目的を達成するため、本発明の粘弾性特性計測方法は、筋の粘弾性特性を計測する方法であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する方法である。
【0008】
ここで、限定されるわけではないが、筋は、ヒト、サル、ウマ、マグロなど動物の筋であることが好ましい。また、限定されるわけではないが、粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスであることが好ましい。また、限定されるわけではないが、粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率であることが好ましい。また、限定されるわけではないが、筋力は、等尺性収縮における筋力であることが好ましい。また、限定されるわけではないが、駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激であることが好ましい。
【0009】
本発明の粘弾性特性計測装置は、筋の粘弾性特性を計測する装置であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有する。
【0010】
ここで、限定されるわけではないが、筋は、ヒト、サル、ウマ、マグロなど動物の筋であることが好ましい。また、限定されるわけではないが、粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスであることが好ましい。また、限定されるわけではないが、粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率であることが好ましい。また、限定されるわけではないが、筋力は、等尺性収縮における筋力であることが好ましい。また、限定されるわけではないが、駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激であることが好ましい。
【発明の効果】
【0011】
本発明は、以下に記載されるような効果を奏する。
【0012】
本発明の粘弾性特性計測方法は、筋の粘弾性特性を計測する方法であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出するので、新規な粘弾性特性計測方法を提供することができる。
【0013】
本発明の粘弾性特性計測装置は、筋の粘弾性特性を計測する装置であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有するので、新規な粘弾性特性計測装置を提供することができる。
【図面の簡単な説明】
【0014】
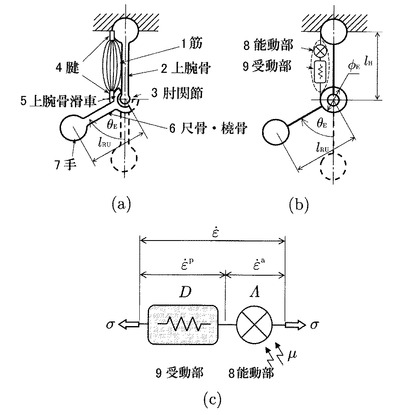
【図1】筋について、作用した力に応じて形状が変化する受動変形と、運動するために自ら形状を変化させる能動変形を、力学的な直列モデルで表した図である。
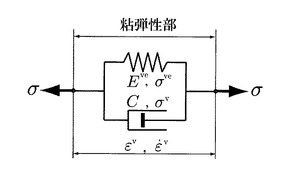
【図2】受動部の変形特性を表す構成モデルとしての、Kelvinモデルを示す図である。
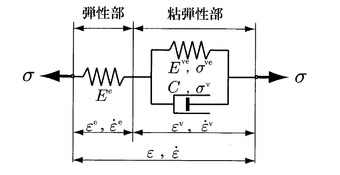
【図3】受動部の変形特性を表す構成モデルとしての、3要素固体モデルを示す図である。
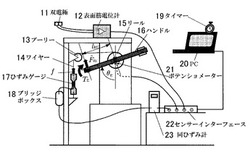
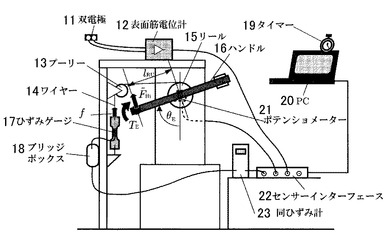
【図4】ヒト上腕の筋を等尺性収縮させるために肘関節を中心に屈曲させるハンドルと、そのときの荷重値や表面筋電位を計測するための計測機器からなる試験装置を示す図である。
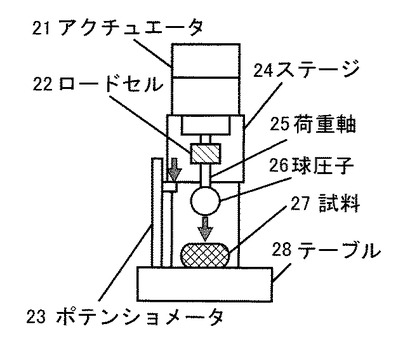
【図5】前腕の筋の代表Young率を計測するための、押込試験機の概略を示す図である。
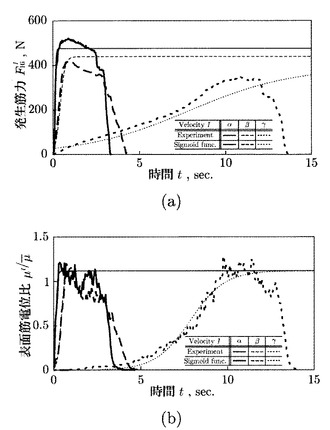
【図6】各速度において計測した、発生筋力−時間グラフと表面筋電位比−時間グラフを示す図である。
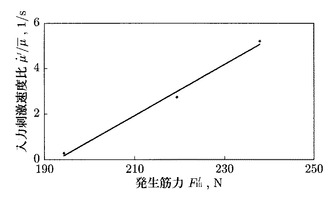
【図7】各速度において計測した、発生筋力と表面筋電位比の関係を示す図である。
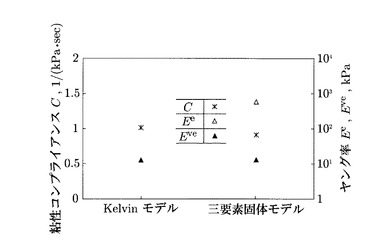
【図8】Kelvinモデルと3要素固体モデルにおける各物性値を示す図である。
【発明を実施するための形態】
【0015】
以下、粘弾性特性計測方法および粘弾性特性計測装置にかかる発明を実施するための形態について説明する。
【0016】
粘弾性特性計測方法は、筋の粘弾性特性を計測する方法であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する方法である。
粘弾性特性計測装置は、筋の粘弾性特性を計測する装置であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する演算部を有するものである。
【0017】
粘弾性特性としては、ケルビンモデル(Kelvinモデル)における、ヤング率および粘性コンプライアンスを採用することができる。または、粘弾性特性としては、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率を採用することができる。
【0018】
なお、本明細書の文章において、英文字記号にオーバードットを付すものを「(英文字記号)オーバードット」と記載し、英文字記号にオーバー波線を付すものを「(英文字記号)オーバー波線」と記載し,英文字記号にオーバーバーを付すものを「(英文字記号)オーバーバー」と記載する。
【0019】
本発明では、ヒトの多様な運動機能のメカニクスを解析するために不可欠な筋の力学的特性を明らかにする目的で、特に自ら収縮する運動過程での筋の粘弾性特性をin situ計測した筋力および表面筋電位(surface electromyography, sEMG)から同定する方法を提示する。この粘弾性特性に関しては、特に弾性要素と粘性要素が並列な Kelvinモデルおよび 3要素固体モデルによって同定する方法をここでは示す。
【0020】
筋の変形モデルについて説明する。
最初に、運動と筋の変形について説明する。筋は、その形状が作用した力に応じて変化する受動変形と、運動するために自ら形状を変化させる能動変形とをする力学的な2つの機能を有している。本発明では、これらの変形を表すモデルとして、作用力に応じて変形する受動部と自ら変形する能動部の2つの機能の直列モデルを考える。例えば図1(a)の上腕モデルにおいては、肘の回転角θEに応じて上腕の筋の長さlHが変化する。この長さlHの変化に伴って生じるひずみについて、図1(b)に示すような受動部9と能動部8の直列モデルに置き換えて考えると、このモデルにおける全ひずみ速度εオーバードットは、図1(c)に示すように、受動部9のひずみ速度εPオーバードットと能動部8のひずみ速度εaオーバードットの和として次式によって表すことができる。
【0021】
【数1】

【0022】
つぎに、構成モデルについて説明する。この式(1)に示す全ひずみ速度εオーバードットに関して、受動部のひずみ速度εPオーバードットと作用する応力速度σオーバードットとの一般的な関係を、本発明では変形抵抗率Dを用いた次式で表す。
【0023】
【数2】
【0024】
また能動部のひずみ速度εaオーバードットに関しては、この能動変形の大きさを表す信号μと比例定数Λを用いて次式によって表現する。
【0025】
【数3】
【0026】
【数4】
【0027】
この比例定数Λを本発明では筋収縮係数と呼ぶこととする。
つぎに、粘弾性特性の同定について説明する。本発明では、まず能動部の変形特性を同定した上で、この情報から受動部の変形特性を同定する手法を検討する。
【0028】
ここで、まず同定する能動部の変形特性に関しては、筋の全長を変化させずに筋力を発揮させる等尺性収縮を考える。この場合には、筋の長さが変化しない関係から、全ひずみ速度εオーバードットに関して次式が成立する。
【0029】
【数5】
【0030】
したがって、この式(5)と(4)の関係から、能動部のひずみ速度εaオーバードットは次式によって表すことができる。
【0031】
【数6】
【0032】
この条件において、受動部の変形特性が代表的なYoung率Eのみで表されるものとして
【0033】
【数7】
【0034】
なる関係を考えると、ここでの発揮筋力速度をFオーバードット、筋の断面積をAとした場合に次式を導出できる。
【0035】
【数8】
【0036】
したがって、筋収縮係数Λは、筋の代表Young率Eと断面積Aが既知である場合には、発揮筋力速度Fオーバードットと信号速度μオーバードットから次式によって同定することができる。
【0037】
【数9】
【0038】
ここでは、受動部の変形特性を表す構成モデルとして図 2に示すKelvinモデルを考える場合に、このモデルの物性値を発揮筋力速度Fオーバードットと信号速度μオーバードットから同定する方法を示す。
【0039】
まず、受動部にKelvinモデルを考える場合の筋収縮係数Λの同定方法を示す。ここでは、粘性の影響を無視できる理想的な極低速のひずみ速度εオーバードットの条件を
【0040】
【数10】
【0041】
の様に添え字γを用いて表すものとすると、この場合に図2のKelvinモデルで表される粘弾性体の受動部では次の関係が成立する。
【0042】
【数11】
【0043】
さらに、このときの発揮筋力速度Fγオーバードットと信号速度μγオーバードットから、筋収縮係数Λが次式によって同定できる。
【0044】
【数12】
【0045】
次に受動部の変形特性の同定であるが、まず粘性が影響するひずみ速度をεPαオーバードットと添え字αを用いて表すと、このとき図2に示すKelvinモデルの特性から次式が成立する。
【0046】
【数13】
【0047】
【数14】
【0048】
また、等尺性収縮の条件から次式
【0049】
【数15】
【0050】
を考える。なお、このとき能動部ひずみεaが信号μの大きさのみに依存する条件の下でおなじ大きさの信号μα=μγでの比較を行う場合には、εaα=εaγすなわちεPα=εPγも成立することから、次の関係を考えることができる。
【0051】
【数16】
【0052】
この式(13)、(14)からは、粘性コンプライアンスCが次式によって表すことができる。
【0053】
【数17】
【0054】
また、このときの発揮筋力Fαと筋の断面積Aから応力σαは
【0055】
【数18】
【0056】
であり、また式(16)より応力σveαについては
【0057】
【数19】
【0058】
と表すことができるので、式(17)の粘性コンプライアンスCは次式となる。
【0059】
【数20】
【0060】
図1の受動部の変形を評価する構成モデルとして、ここでは3要素固体モデルを適用してその特性を同定する方法を示す。
【0061】
まず構成式に関しては、図3に示すモデルを直列な関係にある弾性部と粘弾性部へ分けて考え、この関係から受動部のひずみ速度εPオーバードットを弾性部と粘弾性部のひずみ速度εeオーバードットとεvオーバードットの和として次式によって表す。
【0062】
【数21】
【0063】
ここで、各部では応力とひずみについては次の関係がある。
【0064】
【数22】
【0065】
【数23】
【0066】
【数24】
【0067】
これら式(22),(23),(24)で表される構成式に関して、その物性値Ee,Eve,Cが一定である場合の同定法を考える。このとき、筋の断面積をAとする場合の発揮筋力Fは、これら式(22),(23),(24)の関係から次式によって表すことができる。
【0068】
【数25】
【0069】
ここで、添え字γで表す0に近い粘性を無視できる理想的な極低速の能動部のひずみ速度εaγオーバードットに対して、添え字αおよびβで表す高速な2つの能動部のひずみ速度εaαオーバードットおよびεaβオーバードットを次式のように考える。
【0070】
【数26】
【0071】
このときに筋の等尺性収縮 (εオーバードット=0)を考えると、受動部のひずみ速度εPオーバードットに関しては次の関係が成立する。
【0072】
【数27】
【0073】
このように各速度に差が生じるとき、この速度に対応する発揮筋力Fα,Fβ,Fγには差が生じる。粘性を無視できる速度での発揮筋力Fγを基準に考えると、この差は式(25)から次の関係で表すことができる。
【0074】
【数28】
【0075】
【数29】
【0076】
また、能動部ひずみεaが信号μの大きさのみに依存する条件の下でおなじ大きさの信号μα=μβ=μγでの比較を行う場合には、εaα=εaβ=εaγが成り立つので、式(28),(29)は式(6)と(21)の関係を利用して次式のように整理することが出来る。
【0077】
【数30】
【0078】
【数31】
【0079】
さらに式(8),(22)から、式(30),(31)は次式のようになる。
【0080】
【数32】
【0081】
【数33】
【0082】
ここで、粘性を無視できる極低速のひずみ速度εaγオーバードットにおいては,代表Young率Eと弾性部Young率Ee、粘弾性部Young率Eveの間で次の関係が成立する。
【0083】
【数34】
【0084】
この関係は、これらのYoung率が一定である場合にはひずみ速度に関係なく成立する。
この式(34)を用いて式(32),(33)とCについて整理すると、次の関係が得られる。
【0085】
【数35】
【0086】
さらにこの式 (35)を弾性部Young率Eeについて整理すると、次の関係となる。
【0087】
【数36】
【0088】
ここで、変数Bは次の関係を表す。
【0089】
【数37】
【0090】
ここで得られた弾性部Young率Eeを式(35)へ代入することにより、粘性コンプライアンスCが次式によって求められる。
【0091】
【数38】
【0092】
また、粘弾性部Young率Eveは式(34)より、次式によって求められる。
【0093】
【数39】
【0094】
ヒト上腕の筋の粘弾性計測について説明する。
最初に、試験装置について説明する。上腕屈曲における上腕部内側の筋の特性を調べる目的で、駆動入力刺激μに表面筋電位を用い、肘関節の回転運動に関する等尺性収縮試験を行う。図4に、ヒト上腕の筋を等尺性収縮させるために肘関節を中心に屈曲させるハンドル16と、そのときの荷重値や表面筋電位を計測するための計測機器からなる試験装置を示す。ハンドル16はリール15と直結しており、ワイヤー端は滑車を介してひずみゲージ17とつながっている 。表面筋電位計12は通過帯域4.7Hz〜3.3×103Hzで増幅倍率を任意の値に変更可能な差動増幅回路を有した自作のものを使用し、直径10mm、中心距離20mmの双電極11を上腕二頭筋の肘側3分の1付近に貼り付けて表面筋電位を計測する。各電圧出力は(株)共和電業製センサーインターフェースPCD320Aを使用して、サンプリング周波数500Hzで計測を行った。PC20は演算部を有しており、この演算部は荷重値および表面筋電位を用いて筋の粘弾性特性を算出する。
【0095】
つぎに、試験条件について説明する。表1に等尺性収縮試験の条件を示す。肘角度とは、前腕骨と上腕骨が同一線上あるときを基準とし、この基準の状態から前腕骨を曲げた角度と定義する。試験は肘角度0度において、意識的に最速で筋を最大随意収縮させる速度α、0.75秒で筋を最大随意収縮させる速度β、10秒で筋を最大随意収縮させる速度γで、それぞれの速度について5回ずつ等尺性収縮を行った。この時、最大随意収縮は3秒間維持し、各試験後は60秒の休息を取った。この試験で荷重値と表面筋電位を計測し、荷重値からそれぞれの速度における上腕部の筋の発生筋力を求める。なお、最大随意収縮を繰り返すことで生じた疲労が、荷重に影響することが考えられるため、試験における速度の順番は、β→α→γ→α→γ→β→γ→β→α→β→γ→α→γ→α→βで行った。
【0096】
【表1】
【0097】
つぎに、発生筋力と表面筋電位比の導出について説明する。各速度において計測した荷重値をfI、ハンドルの負荷荷重をFIHiオーバー波線、ワイヤー巻取り部の直径をφ1、肘関節から前腕骨粗面への筋の接続位置までの距離をφE/2、肘関節から荷重点までの距離をlOとする。添字Iはα、βあるいはγを表す。この時、肘関節トルクTEは、計測した荷重値fIとワイヤー巻取り部の直径φ1およびハンドルの負荷荷重FIHiオーバー波線と肘関節から荷重点までの距離lRUから以下の式のようになる。
【0098】
【数40】
【0099】
【数41】
【0100】
よって、式(40)と式(41)から、ハンドルの負荷荷重FIHiオーバー波線は次のように表すことができる。
【0101】
【数42】
【0102】
ここで、図1(b)より次式が成り立つ。
【0103】
【数43】
【0104】
よって式(43)から、発生筋力FIHiは、ハンドルの負荷荷重FIHiオーバー波線と,肘関節から荷重点までの距離lRUと肘関節から筋の接続位置までの距離φE/2とから求めることが出来る。
今回、発生筋力FIHiは、ワイヤー巻取り部の直径φ1を102mm、肘関節から荷重点までの距離lOを 300mm、lRUとφE/2の比は 5として[2]、求めた。また、表面筋電位比は、まず速度αでの収縮開始最大随意収縮から2秒までの表面筋電位の平均値μオーバーバーを求め、この値からの比μI/μオーバーバーとして定義する。
【0105】
つぎに、シグモイト関数による傾きの導出について説明する。筋収縮過程において、筋が最大駆動をしているのは最大発生筋力の半分の筋力を発揮しているときであると考える。ここで、筋が最大駆動をする時、負荷荷重速度FIHiオーバードットと入力刺激比速度μIオーバードット/μオーバーバーは最大である。よって各速度のグラフにおいて最も大きい傾きを求めることができれば、筋が最大駆動する状態においての傾きを求めることが可能となる。これより、試験結果から得られた発生筋力FIHi−時間tグラフと表面筋電位比μI/μオーバーバー−時間tグラフに対して、式(44)で表されるシグモイド関数を近似関数とし、各グラフの傾きを求めることを検討した。
【0106】
【数44】
【0107】
これは式(44)で表されるシグモイド関数の最大傾きが、最大値f(x)maxの半分の値の時に求めることが出来るためである。よって、負荷荷重速度FIHiオーバードットと入力刺激比速度μIオーバードット/μオーバーバーは、試験結果を近似したシグモイド関数f(x)の最大傾きから求める。
【0108】
つぎに、代表Young率の計測について説明する。谷の押込試験[1]によって、前腕の筋の代表Young率を、図5に示す試験装置を用いて計測する。試験装置は最大1.2m/sの日本精工(株)製メカトロアクチュエータXY-HRS400-RH202に取り付けられた荷重軸25をPCで制御する仕組みとなっている。荷重は荷重軸25に取り付けた(株)共和電業製ロードセルLUR-A100NSA1から取得し、変位量は球圧子26を取り付けたアクチュエータのステージ24の移動量として、これをアルプス電気(株)製スライドボリュームRSA0N11S9002によって計測する。押込試験は成人男性1名の前腕の筋に対して1回行った。この時に用いる球圧子26にはアクリル製の直径=2.0×10-2 mの形状のものを利用し、球圧子26と前腕の接触面には油を塗布することで摩擦の低減を行う。また、速度条件は筋の粘性の影響を可能な限り低減するため、速度0.1mm/sで行う。この条件で、変位量と荷重を計測することで、代表Young率を12.7kPaと求めることが出来た。今回は、前腕で求めた代表Young率を、上腕の筋の代表Young率EHiとして用いる。
【0109】
つぎに、各モデルにおける物性値の同定について説明する。図6に各速度において計測した発生筋力の5回の平均値−時間グラフと表面筋電位比の5回の平均値−時間グラフを示す。この時の各速度における試験結果をシグモイド関数で近似し、その最大傾きから負荷荷重速度FIHiオーバードットと入力刺激比速度μIオーバードット/μオーバーバーを求める。また、筋の断面積AHiは一定として、直径40mmの円形と仮定し[3]およそ13cm2を用いる。
【0110】
Kelvinモデル・3要素固体モデルにおける各物性値を図8に示す。ここで、粘性コンプライアンスCは、式(20)におけるμαオーバードット/(FαHiオーバードット−FγHiオーバードット)を図7におけるμIオーバードット/μオーバーバーとFIHiオーバードットの比として求めた。ここでは、Kelvinモデルと3要素個体モデルにおける、粘性コンプライアンスCHiと粘弾性部のYoung率EveHiが、近い値となっている。また、3要素固体モデルにおいては、弾性部のYoung率EeHiが粘弾性部のYoung率EveHiより大きい。
【0111】
以上のように、筋の粘弾性特性同定を行うために、ヒトの上腕の筋に対して等尺性収縮試験を行った。また、得られた発生筋力FIHi−時間tグラフと表面筋電位比μI/μオーバーバー−時間tグラフに対してシグモイド関数による近似を行い、Kelvinモデルと3要素固体モデルにおける筋の粘弾性特性同定に必要な値を求めた。この時、また、求めた傾きから筋の粘弾性特性同定を行うことが可能であることを示した。
【0112】
なお、筋としては、ヒト、サル、ウマ、マグロなど動物の筋を採用することができる。
【0113】
筋の種類としては、横紋筋、平滑筋、および心筋を採用することができる。これは、筋電位と筋の活動の相関性が同様であるためである。
【0114】
等尺性収縮試験は、意識的に最速で筋を最大随意収縮させる速度α、中速で筋を最大随意収縮させる速度β、および低速で筋を最大随意収縮させる速度γで行うことが好ましい。ここで、速度αより速度βは小さく、また速度βより速度γははるかに小さい。
【0115】
速度αにおいて、筋を最大随意収縮させる時間は0.05〜5秒の範囲内にあることが好ましい。最大随意収縮させる時間が0.05秒以上であると、信号計測が容易という利点がある。最大随意収縮させる時間が5秒以下であると、粘弾性の評価が容易という利点がある。
【0116】
速度βにおいて、筋を最大随意収縮させる時間は0.1〜10秒の範囲内にあることが好ましい。最大随意収縮させる時間が0.1秒以上であると、速度αにおける筋を最大随意収縮と有意な差を生じさせることができるという利点がある。最大随意収縮させる時間が10秒以下であると、速度γにおける筋を最大随意収縮と有意な差を生じさせることができるという利点がある。
【0117】
速度γにおいて、筋を最大随意収縮させる時間は5〜50秒の範囲内にあることが好ましい。最大随意収縮させる時間が5秒以上であると、粘性の影響を低減できるという利点がある。最大随意収縮させる時間が50秒以下であると、時間経過による筋の疲労の影響を低減できるという利点がある。
【0118】
上腕部内側の筋の特性を調べる目的で等尺性収縮試験を行う場合、肘角度は0〜150度の範囲内にあることが好ましい。肘角度が0度以上であると、関節の最大角を基準にできるという利点がある。肘角度が150度以下であると、最も筋が縮んだ状態を上限にできるという利点がある。
【0119】
筋力は、等尺性収縮における筋力に限定されるものではない。このほか筋力としては、等張性収縮などを採用することができる。等張性収縮を採用した場合、肘角度が変わる運動過程の筋の特性を評価できるという利点がある。
【0120】
筋の粘弾性特性をケルビンモデルで表す場合、ヤング率は10kPa〜100MPaの範囲内にあることが好ましい。筋のヤング率が10kPa以上であると、押し込みにより代表ヤング率を計測できるという利点がある。筋のヤング率が100MPa以下であると、従来は計測が困難であった特性を評価できるという利点がある。
【0121】
筋の粘弾性特性をケルビンモデルで表す場合、粘性コンプライアンスは10-14〜103(PaS)-1の範囲内にあることが好ましい。筋の粘性コンプライアンスが10-14(PaS)-1以上であると、粘性挙動を同定できるという利点がある。筋の粘性コンプライアンスが103(PaS)-1以下であると、低侵襲で計測できるという利点がある。
【0122】
筋の粘弾性特性を3要素固体モデルで表す場合、弾性部のヤング率は100Pa〜100MPaの範囲内にあることが好ましい。弾性部のヤング率が100Pa以上であると、低侵襲で計測できるという利点がある。弾性部のヤング率が100MPa以下であると、軟らかい圧子による押込試験もできるという利点がある。
【0123】
筋の粘弾性特性を3要素固体モデルで表す場合、粘弾性部の粘性コンプライアンスは10-14〜103(PaS)-1の範囲内にあることが好ましい。粘弾性部の粘性コンプライアンスが10-14(PaS)-1以上であると、粘性挙動を同定できるという利点がある。粘弾性部の粘性コンプライアンスが103(PaS)-1以下であると、低侵襲で計測できるという利点がある。
【0124】
筋の粘弾性特性を3要素固体モデルで表す場合、粘弾性部中の弾性部のヤング率は100Pa〜100MPaの範囲内にあることが好ましい。粘弾性部中の弾性部のヤング率が100Pa以上であると、低侵襲で計測できるという利点がある。粘弾性部中の弾性部のヤング率が100MPa以下であると、軟らかい圧子による押込試験もできるという利点がある。
【0125】
駆動入力刺激の信号としては、表面筋電、針筋電、神経筋刺激などを採用することができる。
【0126】
本実施の形態では、構成モデルとしてケルビンモデルと3要素固体モデルの双方を採用し、この同定法の汎用性を示した。
【0127】
構成モデルとして、ケルビンモデルは要素数が少なく物性値を同定しやすい利点がある。3要素固体モデルは、より複雑な粘弾性特性を表現できる利点がある。
【0128】
本実施の形態によれば、運動中の筋の変形特性について同定できれば、スポーツのトレーニングにおける筋の強化法について指針を示す、医療における筋のリハビリテーション法を評価する、心筋の状態をin situで検査する、なども可能となる。
【0129】
本発明の用途としては、筋の活動状態の差異が大きく影響する医療・福祉、スポーツ科学、さらには競走馬のトレーニングなどがある。
【0130】
なお、本発明は上述の発明を実施するための形態に限らず本発明の要旨を逸脱することなくその他種々の構成を採り得ることはもちろんである。
【0131】
[参考文献]
[1]谷充博・佐久間淳・小笠原誠・篠宮将光、軟組織に対する低侵襲計測のための押込特性評価、第21回バイオエンジニアリング講演会,No.08-53,(2009),pp.183-184.
[2]船渡和男,http://www.jiss.naash.go.jp/column /saizensen 10.html,2010年1月22日閲覧
[3]赤木・東香・太田・高田・川上・福永、筋厚と形態計測値の組み合わせによる筋形状指標の有効性、信学技報、MBE2005-18,(2005).
【符号の説明】
【0132】
8‥‥能動部、9‥‥受動部、11‥‥双電極、12‥‥表面筋電位計、15‥‥リール、16‥‥ハンドル、17‥‥ひずみゲージ、20‥‥PC、24‥‥ステージ、25‥‥荷重軸、26‥‥球圧子
【技術分野】
【0001】
本発明は、新規な粘弾性特性計測方法に関する。また、本発明は、前記粘弾性特性計測方法を実現する新規な粘弾性特性計測装置に関する。
【背景技術】
【0002】
筋の変形の力学的特性を定量的に調べることは、これがヒトの運動機能を直接的に担う器官であることから、医療や福祉、スポーツ工学の分野などでの科学的な評価において非常に重要である。変形の力学的な特性評価方法は、工学分野の材料試験法では引張試験が標準的であるが、ヒトへの適用を考える場合には低侵襲性が要求される。これに関して発明者は、球圧子押込試験という低侵襲な材料試験法を基礎とすることによって、ヤング率(Young率)や粘性係数など弾性や粘弾性を同定する手法を確立してきた(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】谷充博、佐久間淳、小笠原誠、触診を模擬した球圧子押込試験によるヒト軟組織のin situ 粘弾性計測、日本機械学会第22回バイオエンジニアリング講演論文集、No.09-55、(2010-1)、p.127。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように、発明者は、球圧子押込試験という低侵襲な材料試験法を基礎とすることによって、Young率や粘性係数など弾性や粘弾性を同定する手法を確立してきた。さらに、ヒトの運動における筋の機能的役割を評価する場合には、外力への応答のような作用力に対する受動的な変形特性に加えて、自ら収縮する過程での能動的な変形特性を調べることが重要である。
しかしながら、外力への応答のような作用力に対する受動的な変形特性に加えて、自ら収縮する過程での能動的な変形特性を検討する試みは、まだなされていない。
【0005】
そのため、このような課題を解決する、新規な粘弾性特性計測方法および粘弾性特性計測装置の開発が望まれている。
【0006】
本発明は、このような課題に鑑みてなされたものであり、新規な粘弾性特性計測方法を提供することを目的とする。
また、本発明は、前記粘弾性特性計測方法を実現する新規な粘弾性特性計測装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決し、本発明の目的を達成するため、本発明の粘弾性特性計測方法は、筋の粘弾性特性を計測する方法であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する方法である。
【0008】
ここで、限定されるわけではないが、筋は、ヒト、サル、ウマ、マグロなど動物の筋であることが好ましい。また、限定されるわけではないが、粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスであることが好ましい。また、限定されるわけではないが、粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率であることが好ましい。また、限定されるわけではないが、筋力は、等尺性収縮における筋力であることが好ましい。また、限定されるわけではないが、駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激であることが好ましい。
【0009】
本発明の粘弾性特性計測装置は、筋の粘弾性特性を計測する装置であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有する。
【0010】
ここで、限定されるわけではないが、筋は、ヒト、サル、ウマ、マグロなど動物の筋であることが好ましい。また、限定されるわけではないが、粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスであることが好ましい。また、限定されるわけではないが、粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率であることが好ましい。また、限定されるわけではないが、筋力は、等尺性収縮における筋力であることが好ましい。また、限定されるわけではないが、駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激であることが好ましい。
【発明の効果】
【0011】
本発明は、以下に記載されるような効果を奏する。
【0012】
本発明の粘弾性特性計測方法は、筋の粘弾性特性を計測する方法であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出するので、新規な粘弾性特性計測方法を提供することができる。
【0013】
本発明の粘弾性特性計測装置は、筋の粘弾性特性を計測する装置であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有するので、新規な粘弾性特性計測装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】筋について、作用した力に応じて形状が変化する受動変形と、運動するために自ら形状を変化させる能動変形を、力学的な直列モデルで表した図である。
【図2】受動部の変形特性を表す構成モデルとしての、Kelvinモデルを示す図である。
【図3】受動部の変形特性を表す構成モデルとしての、3要素固体モデルを示す図である。
【図4】ヒト上腕の筋を等尺性収縮させるために肘関節を中心に屈曲させるハンドルと、そのときの荷重値や表面筋電位を計測するための計測機器からなる試験装置を示す図である。
【図5】前腕の筋の代表Young率を計測するための、押込試験機の概略を示す図である。
【図6】各速度において計測した、発生筋力−時間グラフと表面筋電位比−時間グラフを示す図である。
【図7】各速度において計測した、発生筋力と表面筋電位比の関係を示す図である。
【図8】Kelvinモデルと3要素固体モデルにおける各物性値を示す図である。
【発明を実施するための形態】
【0015】
以下、粘弾性特性計測方法および粘弾性特性計測装置にかかる発明を実施するための形態について説明する。
【0016】
粘弾性特性計測方法は、筋の粘弾性特性を計測する方法であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する方法である。
粘弾性特性計測装置は、筋の粘弾性特性を計測する装置であって、筋力および駆動入力刺激を用いて前記粘弾性特性を算出する演算部を有するものである。
【0017】
粘弾性特性としては、ケルビンモデル(Kelvinモデル)における、ヤング率および粘性コンプライアンスを採用することができる。または、粘弾性特性としては、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率を採用することができる。
【0018】
なお、本明細書の文章において、英文字記号にオーバードットを付すものを「(英文字記号)オーバードット」と記載し、英文字記号にオーバー波線を付すものを「(英文字記号)オーバー波線」と記載し,英文字記号にオーバーバーを付すものを「(英文字記号)オーバーバー」と記載する。
【0019】
本発明では、ヒトの多様な運動機能のメカニクスを解析するために不可欠な筋の力学的特性を明らかにする目的で、特に自ら収縮する運動過程での筋の粘弾性特性をin situ計測した筋力および表面筋電位(surface electromyography, sEMG)から同定する方法を提示する。この粘弾性特性に関しては、特に弾性要素と粘性要素が並列な Kelvinモデルおよび 3要素固体モデルによって同定する方法をここでは示す。
【0020】
筋の変形モデルについて説明する。
最初に、運動と筋の変形について説明する。筋は、その形状が作用した力に応じて変化する受動変形と、運動するために自ら形状を変化させる能動変形とをする力学的な2つの機能を有している。本発明では、これらの変形を表すモデルとして、作用力に応じて変形する受動部と自ら変形する能動部の2つの機能の直列モデルを考える。例えば図1(a)の上腕モデルにおいては、肘の回転角θEに応じて上腕の筋の長さlHが変化する。この長さlHの変化に伴って生じるひずみについて、図1(b)に示すような受動部9と能動部8の直列モデルに置き換えて考えると、このモデルにおける全ひずみ速度εオーバードットは、図1(c)に示すように、受動部9のひずみ速度εPオーバードットと能動部8のひずみ速度εaオーバードットの和として次式によって表すことができる。
【0021】
【数1】
【0022】
つぎに、構成モデルについて説明する。この式(1)に示す全ひずみ速度εオーバードットに関して、受動部のひずみ速度εPオーバードットと作用する応力速度σオーバードットとの一般的な関係を、本発明では変形抵抗率Dを用いた次式で表す。
【0023】
【数2】
【0024】
また能動部のひずみ速度εaオーバードットに関しては、この能動変形の大きさを表す信号μと比例定数Λを用いて次式によって表現する。
【0025】
【数3】
【0026】
【数4】
【0027】
この比例定数Λを本発明では筋収縮係数と呼ぶこととする。
つぎに、粘弾性特性の同定について説明する。本発明では、まず能動部の変形特性を同定した上で、この情報から受動部の変形特性を同定する手法を検討する。
【0028】
ここで、まず同定する能動部の変形特性に関しては、筋の全長を変化させずに筋力を発揮させる等尺性収縮を考える。この場合には、筋の長さが変化しない関係から、全ひずみ速度εオーバードットに関して次式が成立する。
【0029】
【数5】
【0030】
したがって、この式(5)と(4)の関係から、能動部のひずみ速度εaオーバードットは次式によって表すことができる。
【0031】
【数6】
【0032】
この条件において、受動部の変形特性が代表的なYoung率Eのみで表されるものとして
【0033】
【数7】
【0034】
なる関係を考えると、ここでの発揮筋力速度をFオーバードット、筋の断面積をAとした場合に次式を導出できる。
【0035】
【数8】
【0036】
したがって、筋収縮係数Λは、筋の代表Young率Eと断面積Aが既知である場合には、発揮筋力速度Fオーバードットと信号速度μオーバードットから次式によって同定することができる。
【0037】
【数9】
【0038】
ここでは、受動部の変形特性を表す構成モデルとして図 2に示すKelvinモデルを考える場合に、このモデルの物性値を発揮筋力速度Fオーバードットと信号速度μオーバードットから同定する方法を示す。
【0039】
まず、受動部にKelvinモデルを考える場合の筋収縮係数Λの同定方法を示す。ここでは、粘性の影響を無視できる理想的な極低速のひずみ速度εオーバードットの条件を
【0040】
【数10】
【0041】
の様に添え字γを用いて表すものとすると、この場合に図2のKelvinモデルで表される粘弾性体の受動部では次の関係が成立する。
【0042】
【数11】
【0043】
さらに、このときの発揮筋力速度Fγオーバードットと信号速度μγオーバードットから、筋収縮係数Λが次式によって同定できる。
【0044】
【数12】
【0045】
次に受動部の変形特性の同定であるが、まず粘性が影響するひずみ速度をεPαオーバードットと添え字αを用いて表すと、このとき図2に示すKelvinモデルの特性から次式が成立する。
【0046】
【数13】
【0047】
【数14】
【0048】
また、等尺性収縮の条件から次式
【0049】
【数15】
【0050】
を考える。なお、このとき能動部ひずみεaが信号μの大きさのみに依存する条件の下でおなじ大きさの信号μα=μγでの比較を行う場合には、εaα=εaγすなわちεPα=εPγも成立することから、次の関係を考えることができる。
【0051】
【数16】
【0052】
この式(13)、(14)からは、粘性コンプライアンスCが次式によって表すことができる。
【0053】
【数17】
【0054】
また、このときの発揮筋力Fαと筋の断面積Aから応力σαは
【0055】
【数18】
【0056】
であり、また式(16)より応力σveαについては
【0057】
【数19】
【0058】
と表すことができるので、式(17)の粘性コンプライアンスCは次式となる。
【0059】
【数20】
【0060】
図1の受動部の変形を評価する構成モデルとして、ここでは3要素固体モデルを適用してその特性を同定する方法を示す。
【0061】
まず構成式に関しては、図3に示すモデルを直列な関係にある弾性部と粘弾性部へ分けて考え、この関係から受動部のひずみ速度εPオーバードットを弾性部と粘弾性部のひずみ速度εeオーバードットとεvオーバードットの和として次式によって表す。
【0062】
【数21】
【0063】
ここで、各部では応力とひずみについては次の関係がある。
【0064】
【数22】
【0065】
【数23】
【0066】
【数24】
【0067】
これら式(22),(23),(24)で表される構成式に関して、その物性値Ee,Eve,Cが一定である場合の同定法を考える。このとき、筋の断面積をAとする場合の発揮筋力Fは、これら式(22),(23),(24)の関係から次式によって表すことができる。
【0068】
【数25】
【0069】
ここで、添え字γで表す0に近い粘性を無視できる理想的な極低速の能動部のひずみ速度εaγオーバードットに対して、添え字αおよびβで表す高速な2つの能動部のひずみ速度εaαオーバードットおよびεaβオーバードットを次式のように考える。
【0070】
【数26】
【0071】
このときに筋の等尺性収縮 (εオーバードット=0)を考えると、受動部のひずみ速度εPオーバードットに関しては次の関係が成立する。
【0072】
【数27】
【0073】
このように各速度に差が生じるとき、この速度に対応する発揮筋力Fα,Fβ,Fγには差が生じる。粘性を無視できる速度での発揮筋力Fγを基準に考えると、この差は式(25)から次の関係で表すことができる。
【0074】
【数28】
【0075】
【数29】
【0076】
また、能動部ひずみεaが信号μの大きさのみに依存する条件の下でおなじ大きさの信号μα=μβ=μγでの比較を行う場合には、εaα=εaβ=εaγが成り立つので、式(28),(29)は式(6)と(21)の関係を利用して次式のように整理することが出来る。
【0077】
【数30】
【0078】
【数31】
【0079】
さらに式(8),(22)から、式(30),(31)は次式のようになる。
【0080】
【数32】
【0081】
【数33】
【0082】
ここで、粘性を無視できる極低速のひずみ速度εaγオーバードットにおいては,代表Young率Eと弾性部Young率Ee、粘弾性部Young率Eveの間で次の関係が成立する。
【0083】
【数34】
【0084】
この関係は、これらのYoung率が一定である場合にはひずみ速度に関係なく成立する。
この式(34)を用いて式(32),(33)とCについて整理すると、次の関係が得られる。
【0085】
【数35】
【0086】
さらにこの式 (35)を弾性部Young率Eeについて整理すると、次の関係となる。
【0087】
【数36】
【0088】
ここで、変数Bは次の関係を表す。
【0089】
【数37】
【0090】
ここで得られた弾性部Young率Eeを式(35)へ代入することにより、粘性コンプライアンスCが次式によって求められる。
【0091】
【数38】
【0092】
また、粘弾性部Young率Eveは式(34)より、次式によって求められる。
【0093】
【数39】
【0094】
ヒト上腕の筋の粘弾性計測について説明する。
最初に、試験装置について説明する。上腕屈曲における上腕部内側の筋の特性を調べる目的で、駆動入力刺激μに表面筋電位を用い、肘関節の回転運動に関する等尺性収縮試験を行う。図4に、ヒト上腕の筋を等尺性収縮させるために肘関節を中心に屈曲させるハンドル16と、そのときの荷重値や表面筋電位を計測するための計測機器からなる試験装置を示す。ハンドル16はリール15と直結しており、ワイヤー端は滑車を介してひずみゲージ17とつながっている 。表面筋電位計12は通過帯域4.7Hz〜3.3×103Hzで増幅倍率を任意の値に変更可能な差動増幅回路を有した自作のものを使用し、直径10mm、中心距離20mmの双電極11を上腕二頭筋の肘側3分の1付近に貼り付けて表面筋電位を計測する。各電圧出力は(株)共和電業製センサーインターフェースPCD320Aを使用して、サンプリング周波数500Hzで計測を行った。PC20は演算部を有しており、この演算部は荷重値および表面筋電位を用いて筋の粘弾性特性を算出する。
【0095】
つぎに、試験条件について説明する。表1に等尺性収縮試験の条件を示す。肘角度とは、前腕骨と上腕骨が同一線上あるときを基準とし、この基準の状態から前腕骨を曲げた角度と定義する。試験は肘角度0度において、意識的に最速で筋を最大随意収縮させる速度α、0.75秒で筋を最大随意収縮させる速度β、10秒で筋を最大随意収縮させる速度γで、それぞれの速度について5回ずつ等尺性収縮を行った。この時、最大随意収縮は3秒間維持し、各試験後は60秒の休息を取った。この試験で荷重値と表面筋電位を計測し、荷重値からそれぞれの速度における上腕部の筋の発生筋力を求める。なお、最大随意収縮を繰り返すことで生じた疲労が、荷重に影響することが考えられるため、試験における速度の順番は、β→α→γ→α→γ→β→γ→β→α→β→γ→α→γ→α→βで行った。
【0096】
【表1】
【0097】
つぎに、発生筋力と表面筋電位比の導出について説明する。各速度において計測した荷重値をfI、ハンドルの負荷荷重をFIHiオーバー波線、ワイヤー巻取り部の直径をφ1、肘関節から前腕骨粗面への筋の接続位置までの距離をφE/2、肘関節から荷重点までの距離をlOとする。添字Iはα、βあるいはγを表す。この時、肘関節トルクTEは、計測した荷重値fIとワイヤー巻取り部の直径φ1およびハンドルの負荷荷重FIHiオーバー波線と肘関節から荷重点までの距離lRUから以下の式のようになる。
【0098】
【数40】
【0099】
【数41】
【0100】
よって、式(40)と式(41)から、ハンドルの負荷荷重FIHiオーバー波線は次のように表すことができる。
【0101】
【数42】
【0102】
ここで、図1(b)より次式が成り立つ。
【0103】
【数43】
【0104】
よって式(43)から、発生筋力FIHiは、ハンドルの負荷荷重FIHiオーバー波線と,肘関節から荷重点までの距離lRUと肘関節から筋の接続位置までの距離φE/2とから求めることが出来る。
今回、発生筋力FIHiは、ワイヤー巻取り部の直径φ1を102mm、肘関節から荷重点までの距離lOを 300mm、lRUとφE/2の比は 5として[2]、求めた。また、表面筋電位比は、まず速度αでの収縮開始最大随意収縮から2秒までの表面筋電位の平均値μオーバーバーを求め、この値からの比μI/μオーバーバーとして定義する。
【0105】
つぎに、シグモイト関数による傾きの導出について説明する。筋収縮過程において、筋が最大駆動をしているのは最大発生筋力の半分の筋力を発揮しているときであると考える。ここで、筋が最大駆動をする時、負荷荷重速度FIHiオーバードットと入力刺激比速度μIオーバードット/μオーバーバーは最大である。よって各速度のグラフにおいて最も大きい傾きを求めることができれば、筋が最大駆動する状態においての傾きを求めることが可能となる。これより、試験結果から得られた発生筋力FIHi−時間tグラフと表面筋電位比μI/μオーバーバー−時間tグラフに対して、式(44)で表されるシグモイド関数を近似関数とし、各グラフの傾きを求めることを検討した。
【0106】
【数44】
【0107】
これは式(44)で表されるシグモイド関数の最大傾きが、最大値f(x)maxの半分の値の時に求めることが出来るためである。よって、負荷荷重速度FIHiオーバードットと入力刺激比速度μIオーバードット/μオーバーバーは、試験結果を近似したシグモイド関数f(x)の最大傾きから求める。
【0108】
つぎに、代表Young率の計測について説明する。谷の押込試験[1]によって、前腕の筋の代表Young率を、図5に示す試験装置を用いて計測する。試験装置は最大1.2m/sの日本精工(株)製メカトロアクチュエータXY-HRS400-RH202に取り付けられた荷重軸25をPCで制御する仕組みとなっている。荷重は荷重軸25に取り付けた(株)共和電業製ロードセルLUR-A100NSA1から取得し、変位量は球圧子26を取り付けたアクチュエータのステージ24の移動量として、これをアルプス電気(株)製スライドボリュームRSA0N11S9002によって計測する。押込試験は成人男性1名の前腕の筋に対して1回行った。この時に用いる球圧子26にはアクリル製の直径=2.0×10-2 mの形状のものを利用し、球圧子26と前腕の接触面には油を塗布することで摩擦の低減を行う。また、速度条件は筋の粘性の影響を可能な限り低減するため、速度0.1mm/sで行う。この条件で、変位量と荷重を計測することで、代表Young率を12.7kPaと求めることが出来た。今回は、前腕で求めた代表Young率を、上腕の筋の代表Young率EHiとして用いる。
【0109】
つぎに、各モデルにおける物性値の同定について説明する。図6に各速度において計測した発生筋力の5回の平均値−時間グラフと表面筋電位比の5回の平均値−時間グラフを示す。この時の各速度における試験結果をシグモイド関数で近似し、その最大傾きから負荷荷重速度FIHiオーバードットと入力刺激比速度μIオーバードット/μオーバーバーを求める。また、筋の断面積AHiは一定として、直径40mmの円形と仮定し[3]およそ13cm2を用いる。
【0110】
Kelvinモデル・3要素固体モデルにおける各物性値を図8に示す。ここで、粘性コンプライアンスCは、式(20)におけるμαオーバードット/(FαHiオーバードット−FγHiオーバードット)を図7におけるμIオーバードット/μオーバーバーとFIHiオーバードットの比として求めた。ここでは、Kelvinモデルと3要素個体モデルにおける、粘性コンプライアンスCHiと粘弾性部のYoung率EveHiが、近い値となっている。また、3要素固体モデルにおいては、弾性部のYoung率EeHiが粘弾性部のYoung率EveHiより大きい。
【0111】
以上のように、筋の粘弾性特性同定を行うために、ヒトの上腕の筋に対して等尺性収縮試験を行った。また、得られた発生筋力FIHi−時間tグラフと表面筋電位比μI/μオーバーバー−時間tグラフに対してシグモイド関数による近似を行い、Kelvinモデルと3要素固体モデルにおける筋の粘弾性特性同定に必要な値を求めた。この時、また、求めた傾きから筋の粘弾性特性同定を行うことが可能であることを示した。
【0112】
なお、筋としては、ヒト、サル、ウマ、マグロなど動物の筋を採用することができる。
【0113】
筋の種類としては、横紋筋、平滑筋、および心筋を採用することができる。これは、筋電位と筋の活動の相関性が同様であるためである。
【0114】
等尺性収縮試験は、意識的に最速で筋を最大随意収縮させる速度α、中速で筋を最大随意収縮させる速度β、および低速で筋を最大随意収縮させる速度γで行うことが好ましい。ここで、速度αより速度βは小さく、また速度βより速度γははるかに小さい。
【0115】
速度αにおいて、筋を最大随意収縮させる時間は0.05〜5秒の範囲内にあることが好ましい。最大随意収縮させる時間が0.05秒以上であると、信号計測が容易という利点がある。最大随意収縮させる時間が5秒以下であると、粘弾性の評価が容易という利点がある。
【0116】
速度βにおいて、筋を最大随意収縮させる時間は0.1〜10秒の範囲内にあることが好ましい。最大随意収縮させる時間が0.1秒以上であると、速度αにおける筋を最大随意収縮と有意な差を生じさせることができるという利点がある。最大随意収縮させる時間が10秒以下であると、速度γにおける筋を最大随意収縮と有意な差を生じさせることができるという利点がある。
【0117】
速度γにおいて、筋を最大随意収縮させる時間は5〜50秒の範囲内にあることが好ましい。最大随意収縮させる時間が5秒以上であると、粘性の影響を低減できるという利点がある。最大随意収縮させる時間が50秒以下であると、時間経過による筋の疲労の影響を低減できるという利点がある。
【0118】
上腕部内側の筋の特性を調べる目的で等尺性収縮試験を行う場合、肘角度は0〜150度の範囲内にあることが好ましい。肘角度が0度以上であると、関節の最大角を基準にできるという利点がある。肘角度が150度以下であると、最も筋が縮んだ状態を上限にできるという利点がある。
【0119】
筋力は、等尺性収縮における筋力に限定されるものではない。このほか筋力としては、等張性収縮などを採用することができる。等張性収縮を採用した場合、肘角度が変わる運動過程の筋の特性を評価できるという利点がある。
【0120】
筋の粘弾性特性をケルビンモデルで表す場合、ヤング率は10kPa〜100MPaの範囲内にあることが好ましい。筋のヤング率が10kPa以上であると、押し込みにより代表ヤング率を計測できるという利点がある。筋のヤング率が100MPa以下であると、従来は計測が困難であった特性を評価できるという利点がある。
【0121】
筋の粘弾性特性をケルビンモデルで表す場合、粘性コンプライアンスは10-14〜103(PaS)-1の範囲内にあることが好ましい。筋の粘性コンプライアンスが10-14(PaS)-1以上であると、粘性挙動を同定できるという利点がある。筋の粘性コンプライアンスが103(PaS)-1以下であると、低侵襲で計測できるという利点がある。
【0122】
筋の粘弾性特性を3要素固体モデルで表す場合、弾性部のヤング率は100Pa〜100MPaの範囲内にあることが好ましい。弾性部のヤング率が100Pa以上であると、低侵襲で計測できるという利点がある。弾性部のヤング率が100MPa以下であると、軟らかい圧子による押込試験もできるという利点がある。
【0123】
筋の粘弾性特性を3要素固体モデルで表す場合、粘弾性部の粘性コンプライアンスは10-14〜103(PaS)-1の範囲内にあることが好ましい。粘弾性部の粘性コンプライアンスが10-14(PaS)-1以上であると、粘性挙動を同定できるという利点がある。粘弾性部の粘性コンプライアンスが103(PaS)-1以下であると、低侵襲で計測できるという利点がある。
【0124】
筋の粘弾性特性を3要素固体モデルで表す場合、粘弾性部中の弾性部のヤング率は100Pa〜100MPaの範囲内にあることが好ましい。粘弾性部中の弾性部のヤング率が100Pa以上であると、低侵襲で計測できるという利点がある。粘弾性部中の弾性部のヤング率が100MPa以下であると、軟らかい圧子による押込試験もできるという利点がある。
【0125】
駆動入力刺激の信号としては、表面筋電、針筋電、神経筋刺激などを採用することができる。
【0126】
本実施の形態では、構成モデルとしてケルビンモデルと3要素固体モデルの双方を採用し、この同定法の汎用性を示した。
【0127】
構成モデルとして、ケルビンモデルは要素数が少なく物性値を同定しやすい利点がある。3要素固体モデルは、より複雑な粘弾性特性を表現できる利点がある。
【0128】
本実施の形態によれば、運動中の筋の変形特性について同定できれば、スポーツのトレーニングにおける筋の強化法について指針を示す、医療における筋のリハビリテーション法を評価する、心筋の状態をin situで検査する、なども可能となる。
【0129】
本発明の用途としては、筋の活動状態の差異が大きく影響する医療・福祉、スポーツ科学、さらには競走馬のトレーニングなどがある。
【0130】
なお、本発明は上述の発明を実施するための形態に限らず本発明の要旨を逸脱することなくその他種々の構成を採り得ることはもちろんである。
【0131】
[参考文献]
[1]谷充博・佐久間淳・小笠原誠・篠宮将光、軟組織に対する低侵襲計測のための押込特性評価、第21回バイオエンジニアリング講演会,No.08-53,(2009),pp.183-184.
[2]船渡和男,http://www.jiss.naash.go.jp/column /saizensen 10.html,2010年1月22日閲覧
[3]赤木・東香・太田・高田・川上・福永、筋厚と形態計測値の組み合わせによる筋形状指標の有効性、信学技報、MBE2005-18,(2005).
【符号の説明】
【0132】
8‥‥能動部、9‥‥受動部、11‥‥双電極、12‥‥表面筋電位計、15‥‥リール、16‥‥ハンドル、17‥‥ひずみゲージ、20‥‥PC、24‥‥ステージ、25‥‥荷重軸、26‥‥球圧子
【特許請求の範囲】
【請求項1】
筋の粘弾性特性を計測する方法であって、
筋力および駆動入力刺激を用いて前記粘弾性特性を算出する
粘弾性特性計測方法。
【請求項2】
筋は、ヒト、サル、ウマ、マグロなど動物の筋である
請求項1記載の粘弾性特性計測方法。
【請求項3】
筋は、ヒトの筋である
請求項1記載の粘弾性特性計測方法。
【請求項4】
粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスである
請求項1記載の粘弾性特性計測方法。
【請求項5】
粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率である
請求項1記載の粘弾性特性計測方法。
【請求項6】
筋力は、等尺性収縮における筋力である
請求項1記載の粘弾性特性計測方法。
【請求項7】
駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激である
請求項1記載の粘弾性特性計測方法。
【請求項8】
駆動入力刺激の信号は、表面筋電である
請求項1記載の粘弾性特性計測方法。
【請求項9】
筋の粘弾性特性を計測する装置であって、
筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有する
粘弾性特性計測装置。
【請求項10】
筋は、ヒト、サル、ウマ、マグロなど動物の筋である
請求項9記載の粘弾性特性計測装置。
【請求項11】
筋は、ヒトの筋である
請求項9記載の粘弾性特性計測装置。
【請求項12】
粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスである
請求項9記載の粘弾性特性計測装置。
【請求項13】
粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率である
請求項9記載の粘弾性特性計測装置。
【請求項14】
筋力は、等尺性収縮における筋力である
請求項9記載の粘弾性特性計測装置。
【請求項15】
駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激である
請求項9記載の粘弾性特性計測装置。
【請求項16】
駆動入力刺激の信号は、表面筋電である
請求項9記載の粘弾性特性計測装置。
【請求項1】
筋の粘弾性特性を計測する方法であって、
筋力および駆動入力刺激を用いて前記粘弾性特性を算出する
粘弾性特性計測方法。
【請求項2】
筋は、ヒト、サル、ウマ、マグロなど動物の筋である
請求項1記載の粘弾性特性計測方法。
【請求項3】
筋は、ヒトの筋である
請求項1記載の粘弾性特性計測方法。
【請求項4】
粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスである
請求項1記載の粘弾性特性計測方法。
【請求項5】
粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率である
請求項1記載の粘弾性特性計測方法。
【請求項6】
筋力は、等尺性収縮における筋力である
請求項1記載の粘弾性特性計測方法。
【請求項7】
駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激である
請求項1記載の粘弾性特性計測方法。
【請求項8】
駆動入力刺激の信号は、表面筋電である
請求項1記載の粘弾性特性計測方法。
【請求項9】
筋の粘弾性特性を計測する装置であって、
筋力および駆動入力刺激を用いて前記粘弾性特性を算出する、演算部を有する
粘弾性特性計測装置。
【請求項10】
筋は、ヒト、サル、ウマ、マグロなど動物の筋である
請求項9記載の粘弾性特性計測装置。
【請求項11】
筋は、ヒトの筋である
請求項9記載の粘弾性特性計測装置。
【請求項12】
粘弾性特性は、ケルビンモデルにおける、ヤング率および粘性コンプライアンスである
請求項9記載の粘弾性特性計測装置。
【請求項13】
粘弾性特性は、3要素固体モデルにおける、弾性部のヤング率、粘弾性部の粘性コンプライアンス、および粘弾性部中の弾性部のヤング率である
請求項9記載の粘弾性特性計測装置。
【請求項14】
筋力は、等尺性収縮における筋力である
請求項9記載の粘弾性特性計測装置。
【請求項15】
駆動入力刺激の信号は、表面筋電、針筋電、または神経筋刺激である
請求項9記載の粘弾性特性計測装置。
【請求項16】
駆動入力刺激の信号は、表面筋電である
請求項9記載の粘弾性特性計測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−257321(P2011−257321A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−133456(P2010−133456)
【出願日】平成22年6月10日(2010.6.10)
【出願人】(504132881)国立大学法人東京農工大学 (595)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月10日(2010.6.10)
【出願人】(504132881)国立大学法人東京農工大学 (595)
【Fターム(参考)】
[ Back to top ]