
粘性・弾性測定装置及びその方法
【課題】検出対象の物質である試料の量が従来に比較して少なく、また装置が従来に比較して小型化でき、かつ10cP程度以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能な粘性・弾性測定装置及びその方法を提供する。
【解決手段】本発明の粘性・弾性測定装置は、粘性または弾性を検出する対象の検出対象物質が入れられた容器と、検出対象物質に浮いた状態で配置され、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子と、浮き回転子に対して、検出対象物質の表面に垂直方向の磁場を印加する磁石と、磁石を駆動して浮き回転子に回転磁場を与え、浮き回転子における導電体内に誘導電流を誘起し、誘導電流と回転子に印加される磁場とのローレンツ相互作用により、回転子に回転トルクを与えて回転させる回転磁場制御部と、浮き回転子の回転状態により、回転子に接する検出対象物質の粘性・弾性を検出する粘性検出部とを有する。
【解決手段】本発明の粘性・弾性測定装置は、粘性または弾性を検出する対象の検出対象物質が入れられた容器と、検出対象物質に浮いた状態で配置され、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子と、浮き回転子に対して、検出対象物質の表面に垂直方向の磁場を印加する磁石と、磁石を駆動して浮き回転子に回転磁場を与え、浮き回転子における導電体内に誘導電流を誘起し、誘導電流と回転子に印加される磁場とのローレンツ相互作用により、回転子に回転トルクを与えて回転させる回転磁場制御部と、浮き回転子の回転状態により、回転子に接する検出対象物質の粘性・弾性を検出する粘性検出部とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物質の力学物性である粘性及び弾性を測定するための粘性・弾性測定装置及びその方法に関する。
【背景技術】
【0002】
従来より、対象とする物質の力学物性を検出するため、粘性や弾性の測定が行われている(例えば、引用文献1参照)。
粘性・弾性測定は、医薬品、食品、塗料、インク、化粧品、化学製品、紙、粘着剤、繊維、プラスチック、ビール、洗剤、コンクリート混和剤、シリコン等の製造過程で、品質管理、性能評価、原料管理、研究開発に必要不可欠な測定技術である。
従来知られている粘性測定法には以下に示すような方法がある。
【0003】
(1)粘度管法、(2)振動子を接触させる方法、(3)表面弾性波を用いる方法 、(4)回転子を用いる方法、(5)剛体球を落下させる方法、(6)動的光散乱法、(7)Zimm型粘度測定法、(8)EMS(Electro Magnetically Spinning)粘度測定法などである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−69872号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した方法の内、(1)〜(5)の方法に関しては、数cc以上の多量の試料(測定対象の物質)が必要となるという欠点があった。
特に、(2)〜(5)の方法に関しては、少なくとも試料の粘度(粘性係数)が10cP以上でないと精度のよい計測が出来ないため、10cP未満よりも低粘度の材料の粘度を、正確に測定できないという欠点があった。
さらに(6)の方法に関しては、測定装置が大掛かりになり、また測定精度を維持できる程度に光を透過する必要があるため、透明試料以外には適用できない。
【0006】
また、(7)の方法に関しては円筒状の回転子が直立した状態で試料中に配置されることが必須の条件となる。
しかしながら、(7)の方法においては、浮力によって回転子を維持しようとした場合、回転子における試料に対する濡れ性などの不均一によって、回転子を直立に維持することが困難である。回転子の試料に対する濡れ性が、回転子の表面全体で均一でなければ、試料中において、回転子を直立させることはできない。
【0007】
また、(8)の方法に関しては、回転子と試料を入れた容器の底に回転子が接触して回転するため、回転子と容器との間の接触点における摩擦が粘度を測定するための誤差となる。
したがって、(8)の方法に関しては、摩擦の程度にもよるが、この摩擦により発生する測定誤差により、(2)〜(5)の方法と同様に、少なくとも10cP未満の粘度の試料に対して、高い精度の測定が行えないという欠点がある。
また、(8)の方法に関しては、容器内の試料中に完全に没している回転子の回転を観察するため、測定精度を維持できる程度に光を透過する必要があり、透明試料以外の試料、例えば黒色の試料に対して適用できないという欠点がある。
また、(8)の方法に関しては、レーザの散乱を用いて、試料中の回転子の回転を観察する場合、反射光として強い散乱光を発生するコロイドやスラリーなどの試料に対しては適用できない欠点がある。
【0008】
さらに、(7)及び(8)の方法に関しては、回転磁場を生成する磁石が試料を入れた容器の側壁に沿って回転するため、容器の側壁の外周部に磁石の回転する領域を確保する必要がある。このため、容器内の試料温度を制御する温度制御装置や、電場の印加装置などを構成する際に制約を受け、装置が大型化する欠点がある。
【0009】
上述した理由により、(1)〜(8)に記載した方法では、液体や他のソフトマテリアル(Soft material、あるいはSoft matter:ソフトマター)の粘性及び弾性といった普遍的な物理量(力学的な物理量)を、少量の試料で簡易に測定したり、あるいは低粘度の試料について高精度で測定を行うことが困難であり、かつ、装置を小型化することに制約があるなどの欠点がある。
【0010】
本発明は、このような事情に鑑みてなされたもので、検出対象の物質である試料の量が従来に比較して少なく、また装置が従来に比較して小型化でき、かつ10cP程度以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能な粘性・弾性測定装置及びその方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の粘性・弾性測定装置は、粘性または弾性を検出する対象の検出対象物質が入れられた容器と、該検出対象物質に浮いた状態で配置され、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子と、前記浮き回転子に対して、前記検出対象物質の表面に垂直方向の磁場を印加する磁石と、該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる回転磁場制御部と、前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する粘性検出部とを有することを特徴とする。
【0012】
本発明の粘性・弾性測定装置は、前記回転磁場の回転軸に垂直な配置面において、前記磁石がN極とS極とが交互に複数配列されて構成されていることを特徴とする。
【0013】
本発明の粘性・弾性測定装置は、前記磁石が永久磁石から構成されており、前記回転軸を中心として、前記配置面に対して平行に回転させて、前記回転磁場を生成することを特徴とする。
【0014】
本発明の粘性・弾性測定装置は、前記磁石が、電磁石で構成されており、前記回転磁場制御部が、配列された前記電磁石が隣接した他の電磁石と異なる極性となるように、前記電磁石を駆動して前記回転磁場を生成することを特徴とする。
【0015】
本発明の粘性・弾性測定装置は、前記磁石が前記容器の上部あるいは下部に、前記検出対象物質の表面に平行に配置されていることを特徴とする。
【0016】
本発明の粘性・弾性測定装置は、前記浮き回転子が浮力、あるいは表面張力、または浮力及び表面張力の双方によって、前記検出対象物質の表面に浮いてることを特徴とする。
【0017】
本発明の粘性・弾性測定装置は、前記浮き回転子が、回転中心に凹状の回転位置固定部を有しており、前記回転軸に対して平行方向に形成された突起が、前記回転位置固定部に挿入されていることを特徴とする。
【0018】
本発明の粘性・弾性測定装置は、前記浮き回転子が、前記検出対象物質と接する下面が円錐形状に形成され、前記容器が、内部の底面が平面形状を有しており、前記浮き回転子の前記下面における円錐形状の最も厚い部分の厚さと最も薄い部分の厚さとの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする。
【0019】
本発明の粘性・弾性測定装置は、前記浮き回転子が、前記検出対象物質と接する下面が平面形状に形成され、前記容器が、内部の底面が円錐形状を有しており、前記容器の内部の前記底面における円錐形状のととの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする。
【0020】
本発明の粘性・弾性測定装置は、前記浮き回転子の回転数を検出する回転検出部をさらに有し、前記粘性検出部が、前記回転磁場の回転数及び前記浮き回転子の回転数の比とにより、前記検出対象物質の粘性を求めることを特徴とする。
【0021】
本発明の粘性・弾性測定装置は、粘度が分かっている複数の基準物質における前記浮き回転子の回転数、及び前記回転磁場との比と、前記複数の基準物質の粘度との対応関係を予め標準データとして記憶する標準データ記憶部を更に有し、前記粘性検出部が測定した検出対象物質における前記浮き回転子の回転数、及び前記回転磁場との比を、前記標準データと比較して、前記検出対象物質の粘性を求めることを特徴とする。
【0022】
本発明の粘性・弾性測定装置は、前記検出対象物質の表面に浮いた前記浮き回転子の下面と、前記容器の底面との試料距離を測定する距離測定部と、前記試料距離及び補正係数の関係を示す補正係数記憶部とをさらに有し、前記粘性検出部が、距離測定部の測定した試料距離に対応する前記補正係数を前記補正係数記憶部から読み出し、前記標準データから求めた粘性に乗算して、乗算結果を粘性として出力することを特徴とする。
【0023】
本発明の粘性・弾性測定装置は、前記回転検出部が、光学測定により、前記浮き回転子の回転数を検出することを特徴とする。
【0024】
本発明の粘性・弾性測定装置は、前記浮き回転子の上面にマークが付加されており、前記回転検出部が、前記マークの回転数を検出し、前記浮き回転子の回転数として出力することを特徴とする。
【0025】
本発明の粘性・弾性測定装置は、前記検出対象物質が、液体あるいはソフトマテリアルであることを特徴とする。
【0026】
本発明の粘性・弾性測定方法は、容器に粘性または弾性を検出する対象の検出対象物質を入れる過程と、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子を、前記検出対象物質に浮いた状態で配置し、前記浮き回転子に対して、磁石により前記検出対象物質の表面に垂直方向の磁場を印加する過程と、該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる過程と、前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する過程とを有することを特徴とする。
【発明の効果】
【0027】
この発明によれば、検出対象物質に浮き回転子を浮かせて、この浮き回転子に対して、浮き回転子の回転軸に平行な磁場を磁石により与え、この磁場を回転軸に対して回転させて回転磁場を生成させ、浮き回転子の回転状態により、検出対象物質の粘性を測定するため、浮き回転子を浮かせれば良いため、従来に比較して検出対象物質の量を少なくできる。
また、この発明によれば、検出対象物質の上面に対して垂直方向の磁場を与え、この磁場を回転させて回転磁場を生成するため、磁石を容器の側壁の外周部において回転させる必要が無く、容器の側壁の外周部に回転磁場を生成する装置の他の装置構成を設ける余裕ができ、従来に比較して装置を小型化することができる。
また、本発明によれば、浮き回転子が容器の底面と接することがないため、従来における回転子と容器との接触による測定誤差が発生せず、10cP以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能となる。
【図面の簡単な説明】
【0028】
【図1】この発明の第1の実施形態による粘性・弾性測定装置の構成例を示す図である。
【図2】試料容器2に試料100を入れ、浮き回転子1を試料100表面に浮かべた概念図である。
【図3】浮き回転子1の構成例を示す図である。
【図4】図1のA−A’における浮き回転子1の断面形状を示す図である。
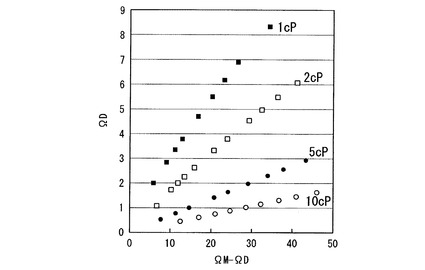
【図5】複数の異なる粘性を有する標準試料における、モータ4の回転数ΩMと浮き回転子の回転数ΩDの差(ΩM−ΩD)と、浮き回転子の回転数ΩD各々との関係を示す図である。
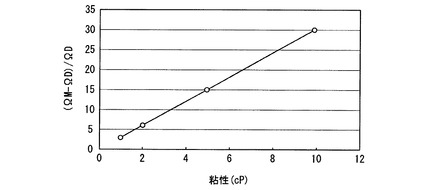
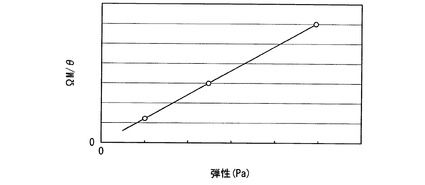
【図6】粘性と、傾きの逆数ΩMD/ΩDとの対応を示す図である。
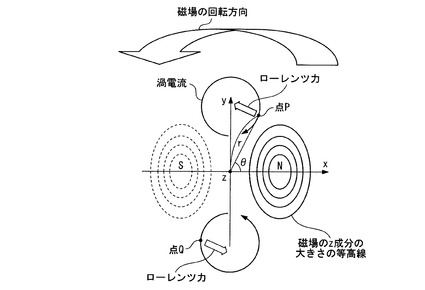
【図7】第1磁石3_1及び第2磁石3_2が回転することで生成する回転磁場により、浮き回転子1に対して、回転トルクを与える方法を説明する概念図である。
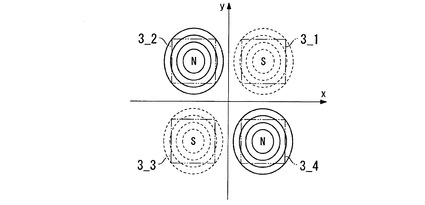
【図8】基準2次元平面に平行に置かれた磁石固定台7に対し、第1磁石3_1、第2磁石3_2、第3磁石3_3及び第4磁石3_4を配置した場合の磁場の状態を示す図である。
【図9】ヨーク10と、このヨーク10から突出したティース10a、10b、10c及び10dとが基準2次元平面上に配置された電磁石を示す図である。
【図10】浮き回転子1が試料容器2内において、試料容器2の内周面に接触せずに回転する機構を説明する図である。
【図11】弾性測定を説明する平面視における浮き回転子1の回転状態を示す図である。
【図12】モータ4の回転速度ΩMと、浮き回転子1が停止する回転角度θとの関係を示す図である。
【図13】弾性と、回転速度及び回転角度の比との関係を示す図である。
【発明を実施するための形態】
【0029】
<第1の実施形態>
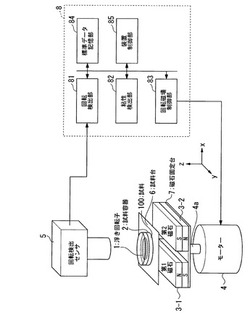
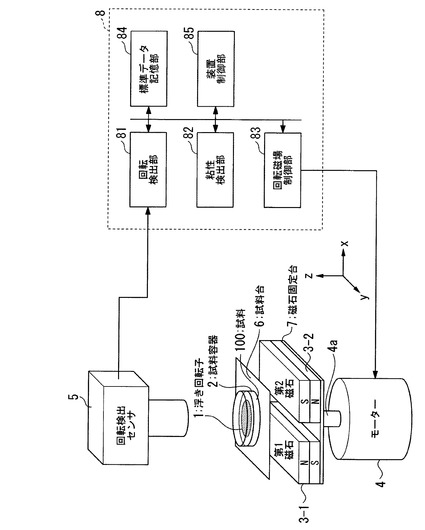
以下、図面を参照して、本発明の第1の実施の形態について説明する。図1は、この発明の一実施形態による粘性・弾性測定装置の構成例を示す図である。
本実施形態による粘性・弾性測定装置は、浮き回転子1、試料容器2、第1磁石3_1、第2磁石3_2、モータ4、回転検出センサ5、試料台6、磁石固定台7及び粘性測定部8を備えている。以下、粘性・弾性測定装置により、物質の力学的物性としての粘性(すなわち粘性係数)を測定する場合について説明する。測定対象の物質としては、液体、あるいはソフトマテリアルである。ソフトマテリアルとは、高分子、液晶、コロイド(エマルション 例:乳液、乳剤、ゾルなど)、生体分子(生体膜、蛋白質、DNAなど)などの一連の分子性物質群である。
【0030】
試料容器2は、力学的物性としての粘性を測定する測定対象物質としての試料を入れる容器であり、例えば小型のシャーレなどである。
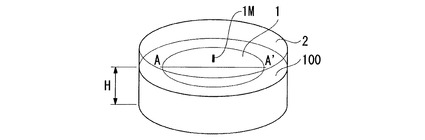
次に、図2は、試料容器2に試料100を入れ、浮き回転子1を試料100の表面に浮かべた概念図である。図2に示すように、試料容器2の内径は、試料100に浮かべる浮き回転子1の直径よりも僅かに大きければ良い。例えば、浮き回転子1が回転した際、試料容器2の内周面に接触しない距離が保てれば良い。また、試料100は、試料容器2において深さHの量が入れられるが、本実施形態の場合、浮き回転子1が試料容器2の底面に接触しなければ良く、例えば、H=0.5mm程度の深さがあれば良い。
【0031】
また、例えば、浮き回転子1として、直径10mmの円盤を用い、容器にH=0.5mmの深さに試料100を入れた場合、試料100は300μリットル程度で、十分な精度により粘性の測定を行うことができる。
したがって、従来に比較して、極めて微量な試料100により、粘性の測定が可能となる。ここで、浮き回転子1は、浮力、あるいは表面張力、または浮力及び表面張力の双方によって、試料100の表面において浮くことになる。
また、浮き回転子1は、上面(試料100に接している下面と逆の面)に、マーク1Mが付加されている。このマークは、後述するように、回転検出センサ5により検出可能であれば、印刷、テープの貼り付け、上面を加工して形成された凹部あるいは凸部などでも良い。
【0032】
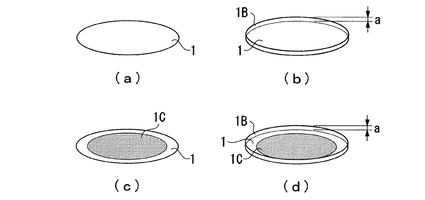
次に、図3は浮き回転子1の構成例を示す図である。図3(a)は、円盤(円板)の形状をしており、浮き回転子1全体がアルミニウムなどの軽量の導電体の材料で形成されている。すなわち、測定する試料よりも比重の小さな導電体であれば何でも良い。
また、図3(b)は、円盤(円板)の外周部に深さaの側壁1Bが設けられ、測定する試料より比重の大きな導電体でも、試料100に対して浮かせることができ、測定する試料より比重浮き回転子1の材料として用いることができる。
【0033】
また、図3(c)及び図3(d)は、少なくとも一部が導電体で形成されている、浮き回転子1の構成例を示す図である。
図3(c)は、図3(a)の形状と同様であるが、浮き回転子1の一部分のみがアルミニウムなどの導電体を用いており、他の部分はプラスチックやビニールなどで構成することができる。例えば、図3(c)及び図3(d)において、1Cの導電体部分がアルミニウムなどの導電体で、浮き回転子1の他の部分を絶縁物で構成しても良い。この導電体部分1Cは、例えば浮き回転子1の上面に市販のアルミ箔などを貼着させて作成しても良い。
【0034】
これにより、市販のアルミ箔と市販のプラスチックなどの円板とから、容易に安価な浮き回転子1を形成することができ、市販のシャーレを試料容器2とすることにより、測定対象の試料100の種類を変更するごとに、浮き回転子1及び試料容器2をディスポーザブルに使用することができる。
この結果、生体材料などの粘性を測定した後、その生体材料が廃棄に特段の注意を要する場合、測定に用いた浮き回転子1及び試料容器2を焼却処理、あるいは滅菌処理を容易に行うことができる。
【0035】
次に、図4は、図2のA−A’における浮き回転子1の断面形状を示す図である。図4(a)は平面視で円形状である板状の浮き回転子1の断面構造を示している。図4(b)は、平面視で円形状である平板の下部、すなわち試料100に接する下面が円錐形状に形成されている。この円錐形状とすることにより、試料100のずり変形の大きさが下面全体で同様となるように、浮き回転子1の最も厚い部分の厚さamaxと、最も薄い部分の厚さaminとの比が設定されている。
また、浮き回転子1がこの図4(b)の形状である場合、試料容器2の浮き回転子1の円錐形状の下面と対向する底面は、平面とされる。
一方、浮き回転子1が図4(a)の形状である場合、試料容器2の浮き回転子1の平面である下面と対向する底面を、浮き回転子1の下面に向かって凸部がある円錐形状とすれば、同様に、浮き回転子1の下面全体における試料100のずり変形を一様とすることができる。
【0036】
図1に戻り、磁石固定台7は、回転磁場を発生させる磁石を固定する平板上の部材であり、例えば、第1磁石3_1と第2磁石とが上面に固定されている。この磁石固定台7は、試料容器2に入れられている試料100の表面(試料100が液体であれば液面)と平行となるように配置されている。
第1磁石3_1は、磁石固定台7の上面側にS極が接し、試料容器2と対向する上面がN極となるように配置されている。
第2磁石3_2は、磁石固定台7の上面側にN極が接し、試料容器2と対向する上面がS極となるように配置されている。
したがって、第1磁石3_1と第2磁石3_2とは、互いに異なる極性の極が試料容器2と対向する配置となっている。
第1磁石3_1と第2磁石3_2とは、それぞれが直方体であり、互いに平行に配置されている。
【0037】
試料台6は、試料100を入れる試料容器2を固定する平板上の部材であり、上面が磁石固定台7の上面と平行となるように配置されている。
これにより、試料容器2に入れられている試料100の上面と、第1磁石3_1と第2磁石3_2とが回転した際における、第1磁石3_1と第2磁石3_2との各々の上面とがなす平面とは、平行となる。
上述した試料台6、磁石固定台7、第1磁石3_1、第2磁石3_2の各々の配置から、第1磁石3_1及び第2磁石3_2により、試料容器2に入れられた浮き回転子1の上面に対して垂直方向の磁場(また、垂直となる磁場成分でも良い)を発生させることができる。
【0038】
モータ4は、磁石固定台7を、磁石固定台7の表面に平行な回転方向で回転させる駆動機構であり、回転軸4aが磁石回転台7の上面に対して軸方向が垂直に固定されている。
また、平面視において、浮き回転子1が試料容器2の内壁に接触せずに、試料100の上面(液面)上において回転する位置に、回転軸4aがくるように、試料容器2とモータ4との配置が設定されている。すなわち、平面視において。試料容器2の中心と、回転軸4aとが重なる位置に、試料容器2とモータ4とが配置されている。
【0039】
回転検出センサ5は、試料容器2の試料100に浮いている浮き回転子1の上面に付加されているマーク(図2におけるマーク1M)が検出できる位置として、試料容器2の上部方向の位置に配置され、このマークを例えば光学的に検出する。すなわち、回転検出センサ5は、光照射部からレーザ光を出射し、浮き回転子1の上面からの反射光を受光部で入射し、入射光の強度に対応した検出電気信号を出力する。ここで、浮き回転子1の上面よりマークの反射率が高い場合、マーク反射光を受光した期間の検出電気信号の電圧が高くなり、一方、浮き回転子1の上面よりマークの反射率が低い場合、マーク反射光を受光した期間の検出電気信号の電圧が低くなる。
また、回転検出センサ5の代わりに、レンズとCCD(Charge Coupled Device)などの撮像素子を顕微鏡に付加した撮像装置を設け、マークを拡大して撮像した撮像画像を出力するようにしても良い。
【0040】
粘性測定部8は、回転検出部81、粘性検出部82、回転磁場制御部83、標準データ記憶部84及び装置制御部85を有している。
回転検出部81は、回転検出センサ5から供給される検出電気信号により、マーク(図2の1M)の検出を行い、単位時間(例えば、1秒)当たりの検出回数を、単位時間当たりの回転数(rpm:revolutions per minute)として出力する。また、回転検出部8は、マーク検出において、回転検出センサ5の検出電気信号を用いるのではなく、撮像装置の撮像画像を用いる場合、撮像装置が撮像して出力する撮像画像から、浮き回転子1の上面のマークを画像処理により検出し、単位時間当たりの回転数を求めるようにしても良い。
【0041】
回転磁場制御部83は、設定された回転数でモータ4が回転するように、モータ4に対する回転制御を行う。これにより、モータ軸4aを介して磁石固定台7が回転することになり、第1磁石3_1と第2磁石3_2とにより発生する磁場が回転し、浮き回転子1を回転させる回転磁場が発生する。
【0042】
標準データ記憶部84は、モータ4の回転数と、粘度が判っている標準試料に浮かべられた浮き回転子1の回転数との比と、粘性(cP)との関係を示す粘性検出テーブルが記憶されている。
この粘性検出テーブルは、以下の様に作成されている。本実施形態の粘性・弾性測定装置において、粘度が予め判っている標準試料を装置容器2に入れ、標準試料の表面に浮き回転子1を浮かべ、予め設定した複数の回転数ΩMによりモータ4を回転させた場合に、各モータ4の回転数ΩMに対応した浮き回転子1の回転数ΩDを、上述した回転検出部81により測定する。この標準試料に対する回転数ΩDの測定を、複数の異なる粘性を有する標準試料(予め粘性の判っている試料)に対して行う。
【0043】
図5は、複数の異なる粘性を有する標準試料における、モータ4の回転数ΩMと浮き回転子の回転数ΩDの差(ΩM−ΩD)と、浮き回転子の回転数ΩD各々との関係を示す図である。横軸は回転数ΩMと回転数ΩDとの回転差ΩMD(回転数ΩM−回転数ΩD)であり、縦軸は回転数ΩDである。使用した各標準試料の粘性は、例えば、それぞれ異なり、1(cP)、2(cP)、5(cP)、10(cP)である。そして、この図5から粘性の異なる標準試料毎の回転差ΩMDと回転数ΩDとの関係、すなわち傾きΩD/ΩMDの対応を示す直線を最低二乗法などにより求める。この傾きの逆数ΩMD/ΩDは、粘性と比例するものである。
【0044】
次に、図6は、粘性と、傾きの逆数ΩMD/ΩDとの対応を示す図である。
図1に戻り、標準データ記憶部84には、粘性(cP)と、傾きの逆数ΩMD/ΩDとの対応を示す粘性検出テーブルが記憶されている。また、粘性検出テーブルではなく、粘性(cP)と、傾きの逆数ΩMD/ΩDとの対応を示す実験式が記憶されていても良い。
【0045】
粘性検出部82は、回転磁場制御部83に対して、異なる複数の回転数ΩMでモータ4を回転させる制御を行い、回転数を変更する毎に制御信号を回転検出部81へ出力する。
回転検出部81は、粘性検出部82から制御信号が供給される毎に、回転数ΩMにおいて試料容器2に入れた試料100の表面に浮かべた浮き回転子1の回転数ΩDを回転検出センサ5から入力する。
そして、回転検出部81は、検出した回転数ΩDを、制御信号に対応して粘性検出部82へ出力する。
【0046】
粘性検出部82は、上述した標準試料の場合と同様に、試料100における傾きΩD/ΩMD(=ΩM−ΩD)を求め、この傾きの逆数ΩMD/ΩDを求める。
そして、粘性検出部82は、標準データ記憶部84に記憶されている粘性検出テーブルから、試料100の逆数ΩMD/ΩDに対応する粘性(cP)を読み出し、これを試料100の粘性として出力する。ここで、標準データ記憶部84に実験式が記憶されている場合、粘性検出部82は、標準データ記憶部84から実験式を読み出し、この実験式に対して傾きの逆数ΩMD/ΩDを代入し、粘性を算出して求める。
【0047】
次に、図7を用いて、浮き回転子1に対して回転トルクを与える方法について説明する。図7は、第1磁石3_1及び第2磁石3_2が回転することで生成する回転磁場により、浮き回転子1に対して、回転トルクを与える方法を説明する概念図である。
図7において、第1磁石3_1のN極と、第2磁石3_2のS極とにより、ある基準面(ここでは、試料容器2に入れた試料100の上面、試料100が液体の場合、液面)に対して垂直な磁場が発生する。
この基準面を、x軸及びy軸からなる基準2次元平面(試料100の液面)とし、この2次元平面において回転する浮き回転子1の回転軸をz軸とする。
【0048】
以降、基準2次元平面あるいはその近傍の点(x,y,z)における磁場のz軸成分をBz(x,y)として示す。
すでに述べたように、磁場は、基準2次元平面に対して垂直であるため、z軸に依存しないと仮定しているが、z軸に依存しても以下の説明に支障はない。また、基準2次元平面に対して垂直な磁場の成分があれば、他に基準2次元平面に対して垂直でない磁場の成分が存在しても、浮き回転子1に対して回転トルクを与えることに支障とならない。
【0049】
図7は、z軸の軸成分が+の方向から第1磁石3_1及び第2磁石3_2の回転を観察している。磁石固定台7が反時計回りに、モータ4により回転させられると、磁場Bz(x、y)も反時計回りに回転することになり、反時計回りの回転磁場が生成される。
例えば、半空間x>0においてBz(x,y)>0であり、半空間x<0においてBz(x,y)<0となった時点の磁場を考える。
このとき、半空間y>0において、磁場の時間変化∂Bz/∂tは正(∂Bz/∂t>0)であり、一方、半空間y<0において、磁場の時間変化∂Bz/∂tは負(∂Bz/∂t>0)である。
【0050】
ここで、z軸を回転軸として、基準2次元平面(試料容器2に入れられた試料100の液面)、あるいは基準2次元平面近傍において、基準2次元平面に対して上面が平行となるように配置された浮き回転子1を考える。
このとき、回転磁場が浮き回転子1における導電体に印加されている場合、レンツの法則を考えると、浮き回転子1の導電体部分の内部には、半空間y>0においては時計回りの渦電流が流れ、半空間y<0においては反時計回りの渦電流が流れる。
上述したように、渦電流が基準2次元平面に平行に生成される場合、第1磁石3_1及び第2磁石3_2によって生成される磁場が基準2次元平面に対して垂直であるため、渦電流と磁場とにより、浮き回転子1の導電体に対してかかるローレンツ力は、基準2次元平面に対して平行に発生する。
【0051】
したがって、基準2次元平面において、x>0かつy>0の領域における任意のP点において生じるローレンツ力をFL1(Fx,Fy,0)とする。ここで、Fx>0及びFy>0である。
この場合、基準2次元平面において、x<0かつy<0の領域における浮き回転子1のz軸(浮き回転子1の回転軸)に対して対称の位置のQ点には、ローレンツFL2(−Fx,−Fy,0)が生じる。
【0052】
すなわち、ローレンツ力FL1(Fx,Fy,0)及びFL2(−Fx,−Fy,0)とにより、P点及びQ点に働く力は偶力となっている。
この結果、浮き回転子1の導電体には回転トルクが印加され、浮き回転子1はz軸を回転軸として反時計回りに回転することになる。
また、回転磁場が時計回りに回転すれば、渦電流における電流の流れる方向が、上述した回転磁場が反時計回りに回転する場合と逆となり、浮き回転子1も時計回りに回転することになる。
【0053】
さらに、回転磁場の回転に伴い、基準2次元平面において、x<0かつy>0の領域における任意の点に対しては、ローレンツ力FL3(Fx,−Fy,0)が印加される。
また、基準2次元平面において、x<0かつy>0の領域における任意の点に対し、x>0かつy<0におけるz軸に対照な点には、ローレンツ力FL4(−Fx,Fy,0)が印加される。したがって、このローレンツ力FL3及びローレンツ力FL4により浮き回転子1に対して反時計回りの回転トルクが発生する。
【0054】
上述したように、基準2次元平面に対して垂直な磁場が渦電流を生成し、この磁場が反時計回りに回転して生成される回転磁場と、生成される渦電流とにより、z軸を対象にした2つの点に対して反時計回りのローレンツ力が発生する。
この結果、浮き回転子1の導電体に発生する渦電流は、全体として反時計回りの回転トルクを受けることにより、導電体を介して浮き回転子1に対して回転トルクが印加されることになる。
【0055】
この浮き回転子1に印加される回転トルクの大きさは、回転磁場の回転数ΩM(モータ4の回転数と同様)と、浮き回転子1の回転数ΩDとの差に比例することになる。
したがって、試料容器2に入れられた試料100の上面(表面)に浮いている浮き回転子に対して、回転トルクが印加されることになる。この回転トルクが印加された結果、浮き回転子1は、試料100の表面において回転トルクの印加される方向に回転することになる。浮き回転子1の回転数ΩDが一定となった場合、この一定となった回転数ΩDは、試料100の粘性に反比例の関係を有する。
【0056】
例えば、説明を簡単とするため、浮き回転子1として半径Rの平面の円板が、試料容器2に入れられた試料100の表面に浮いて回転している状態を考える。このとき、浮き回転子1の下面と試料容器2の内部の底面との距離がdとする。ここで、浮き回転子1は、円板状の浮き回転子1と試料容器2の内部底面とが平行となるように、すでに述べた回転トルクが印加されるメカニズムにより、与えられる回転磁界により回転している。
この場合、浮き回転子1に印加される回転トルクTと、浮き回転子1の回転数ΩDと、試料100の粘性ηとの間には、以下の(1)式に示す関係がある。
【0057】
【数1】

【0058】
上記(1)式により、浮き回転子1に印加される回転トルクTと、試料100の表面に浮いて回転する浮き回転子1の回転数ΩDと、浮き回転子1の半径Rと、試料容器2に入れられた試料100の厚さ(深さ)dとにより、試料100の粘性ηを求められることが判る。
ここで、粘性ηの測定において、浮き回転子1に印加される回転トルクTは、予め粘性ηの判っている標準試料を用いて、すでに説明した図6のように、回転磁界の回転数ΩMと浮き回転子1の回転数ΩDとの回転数差ΩMDの関数として求めておく。
【0059】
また、予め粘性を測定する試料100の密度が判っていれば、この密度に対応して、共通サイズの試料容器2に入れた場合に深さdとなる適当な試料量を、はかりにより秤量することにより、密度の異なる試料100毎に、試料容器2に測定時に入れる試料100の深さdを均一にすることができる。
【0060】
さらに、試料容器2に試料100を入れる際、試料容器2の内部の底面からの、浮き回転子1の下面の高さを計測しながら、標準試料による図4を求めた際の高さd(距離d)となるように、液面センサによる計測された高さデータにより、試料容器2に対する試料100の滴下制御を行う構成を用いてもよい。このとき、試料容器2の側壁に対して、底面からの距離dの位置に適量マークを付加し、この適量マークと試料100の表面との位置を目視、あるいは上述した液面センサを用いて検出し、試料容器2に入れる試料100の滴下制御を行って、試料容器2における試料100の秤量としてもよい。
【0061】
上述した本実施形態によれば、検出対象の物質である試料100の量を、従来の測定にに比較して少なくすることができ、また回転磁界を生成する第1磁石3_1及び第2磁石3_2を、試料容器2下部方向に配置することができるため、装置が従来に比較して小型化することが可能である。
さらに、本実施形態によれば、浮き回転子1が測定する試料100表面に浮いているため、試料容器2と接触することによる測定精度の低下を防止することができ、10cP程度以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能となる。
【0062】
また、適当な量の試料100を試料容器2に対して滴下し、浮き回転子1の回転数の検出を行い、浮き回転子1の下面と、試料容器2の内部底面との高さdを検出し、これらの数値を用いて、(1)式を用いて、試料100の粘性を測定するようにしても良い。
【0063】
また、回転磁場を生成する磁石は、図1においては、第1磁石3_1と第2磁石3_2との2つの組み合わせを用いている。この場合、1つのN極と1つのS極との組み合わせで、磁場を発生している。
次に、図8は、基準2次元平面に平行に置かれた磁石固定台7に対し、第1磁石3_1、第2磁石3_2、第3磁石3_3及び第4磁石3_4を配置した場合の磁場の状態を示す図である。
この図8において、基準2次元平面において、第1磁石3_1がx>0かつy>0にS極が上面となり、第2磁石3_2がx<0かつy>0にN極が上面となり、第3磁石3_3がx<0かつy<0にS極が上面となり、第4磁石3_4がx>0かつy<0にN極が上面となるよう配置されている。
【0064】
この図8の配置により、すでに図7で説明したように、基準2次元平面に対して垂直な磁界が発生し、磁石固定台7を回転させることにより、浮き回転子1の導電体に対して回転磁場を印加することができる。この回転磁場により、浮き回転子1の導電体に発生する渦電流と、回転磁場とにより、浮き回転子1に回転トルクを与えることができる。
このように、複数のN極とS極との組み合わせ、図8においては、2つのN極とS極との組み合わせを用いて、磁場を生成してもよい。
【0065】
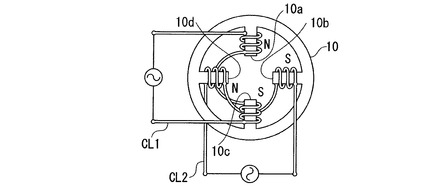
また、図9は、ヨーク10と、このヨーク10から突出したティース10a、10b、10c及び10dとが基準2次元平面上に配置された電磁石を示す図である。ティース10aと10cとには各々異なる巻方向に巻線CL1が巻かれ、同様に、ティース10bと10dとには各々異なる巻方向に巻線CL2が巻かれて、電磁石を構成している。
コイルCL1及びコイルCL2に電流を流し、基準2次元平面に対して垂直な磁場を生成し、流す電流の向きを周期的に変化させ、基準2次元平面に対して垂直な磁場を回転させて回転磁場を形成しても良い。
この場合、回転磁場制御部83が図9の電磁石における巻線CL1及びCL2に対して電流を流し、この流す電流の向きを周期的に変えて、回転磁場を生成させる処理を行う。
【0066】
また、浮き回転子1の回転数の観察は、すでに述べたように、光学センサあるいはCCD等の撮像素子を用い、浮き回転子1の上面に付加されたマークを検出することで行っている。
しかしながら、浮き回転子1の上面に対して、レーザを照射して回転による反射及び干渉パターンの変化を光学的に測定する構成としても良い。
また、浮き回転子1の1部を誘電体で置き換え、電極間に浮き回転子1が挟まれる電極を、図1などの磁石固定台7の回転の邪魔にならない位置に構成し、コンデンサを構成する。そして、回転検出部81は、マークとしての誘電体が電極間を通過する際、電極で構成したコンデンサの容量変化を検出し、所定の期間(たとえば、1秒)におけるこの容量変化の回数を検出し、浮き回転子1の回転数を検出するように構成しても良い。
【0067】
また、回転磁場制御83は、浮き回転子1に対し、印加する回転磁場の回転周期、および回転方向を任意に変化させるようにしても良い。
例えば、回転磁場の回転方向と、回転速度とを周期的に掃引することにより、浮き回転子1に対して、周期的に変化する回転トルクを与えることができる。
【0068】
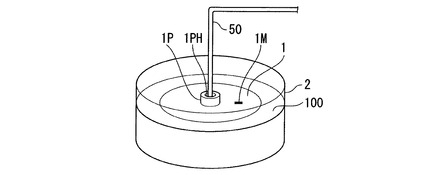
次に、図10は浮き回転子1が試料容器2内において、試料容器2の内周面に接触せずに回転する機構を説明する図である。
図2に示すように、浮き回転子1を試料容器2内の試料100の表面において、回転磁場を与えて回転させる際、回転磁場の印加状態により、浮き回転子1の回転軸がずれる場合がある。ここで、平面視において、浮き回転子1の面積に比較して試料容器2の内部の面積が大きく作成すれば、浮き回転子1の回転軸がずれても、試料容器2の内部の側壁に接触することはない。しかしながら、試料容器2を大きく作成するため、粘性の測定に必要な試料100の量が多くなってしまう。
【0069】
このため、図10に示すように、浮き回転子1の上面に、浮き回転子1の回転軸に対して平行な方向に凸上の固定部1Pを生成する。この固定部1Pは中央に溝1PHが形成されており、この溝1PHに固定軸50が挿入され、浮き回転子1が回転自在となる回転機構が構成されている。この固定軸50は、浮き回転子1の回転軸に対して平行となるように、粘性・弾性測定装置のいずれかに固定されて設置されている。この固定軸50が実質的な浮き回転子1の回転軸となる。
【0070】
この浮き回転子1表面の固定部1Pと、固定軸50とにより、試料容器2に入れられた試料100の表面において、回転軸の位置を所定の場所で固定した状態で浮き回転子1を回転させることが可能となる。
これにより、図10の構成によれば、平面視において、試料容器2の内部の大きさを、浮き回転子1を回転させて粘性を測定するために必要な最小限の大きさとすることができ、従来に比較して試料容器2を小さくし、粘性の測定に必要な試料100の量を低減することが可能となる。
【0071】
次に、本実施形態による粘性・弾性測定装置を用いた弾性の測定について説明する。
本実施形態によれば、液体のように粘性を求めるのではなく、ゲルやゴムなどのように弾性率を有する物質、あるいは粘性の緩和により弾性率が生じる高分子溶液のような物質に対し、一定トルクを与えた際の静止位置からの変位により、粘性率及び弾性率を同時に測定することが可能である。
【0072】
ここで、弾性率は、いわばバネ定数であり、試料100の回転変形に比例した復元力に対応している。
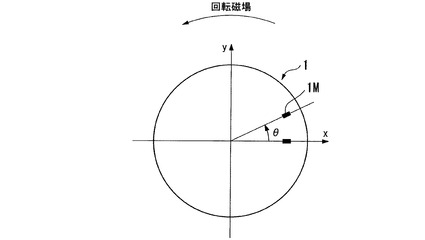
したがって、粘性に加えて弾性がある場合、弾性率による復元力は、歪の程度に比例して大きくなる。このため、浮き回転子1は、回転開始してから、試料のバネ定数に比例した弾性力と、回転磁場による回転トルクが釣り合った回転角度θで回転を停止することになる。図11は、弾性測定を説明する平面視における浮き回転子1の回転状態を示す図である。磁石固定台7が反時計回りに回転することにより、すでに述べたように、反時計回りの回転トルクが浮き回転子1に印加される。
【0073】
そして、浮き回転子1に対して印加される回転トルクと弾性による反発力が釣り合う回転角度θの位置で、浮き回転子1の回転が停止する。
ここで、回転検出部81は、モータ4が回転しておらず、磁石固定台7が停止状態における浮き回転子1表面のマーク1Mの位置と、所定の回転数ΩMでモータ4が回転した後、回転が停止した際のマーク1Mの位置との各々の撮像画像から回転角度θを求める。
【0074】
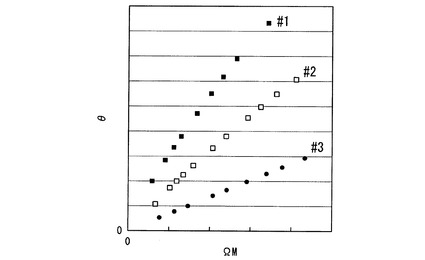
次に、図12は、モータ4の回転速度ΩM(すなわち、回転トルク)と、浮き回転子1が停止する回転角度θとの関係を示す図である。図12おいて、横軸がモータ4の回転数ΩMを示し、縦軸が浮き回転子1の停止する回転角度θを示している。
すなわち、図1に示す粘性・弾性測定装置の場合、磁石固定台7がモータ4により回転することにより、この磁石固定台7に配置されている第1磁石3_1及び第2磁石3_2の磁石が、モータ4の回転速度に対応した回転磁場を生成する。
【0075】
そして、回転磁場制御部83は、予め設定されたステップに従い、モータ4の回転速度を変化させ、回転速度毎の回転角度θを求めて、回転数ΩMと回転角度θとの関係を求めて図12に示すグラフを作成する。ここで、予め弾性が判っている複数の標準試料に対して、粘性と同様に、弾性が未知の試料100の弾性測定に用いる標準データ作成するため、上述した処理を行う。粘性の標準データの作成時と同様に、標準試料を試料容器2に入れて、上述した回転角度θの測定を行う。
【0076】
次に、図13は、弾性と、回転速度及び回転角度の比との関係を示す図である。図13において横軸が弾性(弾性率:Pa)を示し、縦軸が回転速度ΩMと回転角度θとの比例係数を示している。ここで、粘性と回転角度θとは逆比例する。
この図13は、図12における各標準試料の傾き(回転速度ΩMと回転角度θとの比)と、対応する標準試料の粘性とを対応付けて作成した、弾性測定に用いる弾性の標準データである。
実際の未知の弾性の試料100の測定において、この測定対象の試料100を試料容器2に入れ、標準試料の場合と同様に、回転磁場制御部83がモータ4を予め設定した回転速度で回転させる。
【0077】
そして、回転検出部81は、各回転速度毎の回転角度θを求めて、粘性検出部82に対して出力する。
粘性検出部82は、回転検出部81から供給される回転速度ΩMと回転角度θとの比例係数を求め、この比例係数に対応する弾性のデータを、標準データ記憶部84の標準データから読み出し、読み出したデータを試料100の弾性として出力する。
【0078】
また、浮き回転子1に加える回転トルクを時間的に変化させることにより、弾性と粘性とを同時に測定することも可能である。この場合、回転磁場を生成する磁石を、図9に示す電磁石で構成する。
例えば、浮き回転子1に対し、電磁石に対して励磁電流を印加して所定の回転トルクを印加した後、この励磁電流の印加を停止し、停止した後の浮き回転子1の回転状態を観察する。
【0079】
このとき、浮き回転子1は、自身の浮いている試料100の弾性に応じて回転振動を起こすことになる。ここで、弾性に対して回転振動の周期及び振動時間が比例し、粘性に対して回転振動の振幅の減衰率が比例している。
したがって、予め粘性及び弾性の判っている複数の標準試料毎に、その回転振動の振幅の減衰率と、周期及び振動時間とを、浮き回転子1に対して回転磁界を印加することにより測定し、標準データを作成して標準データ記憶部84に予め記憶させておく。
【0080】
次に、実際の未知の粘性及び弾性を有する測定対象の物質を測定する際、粘性検出部82は、測定対象の物質である試料100の振幅の減衰率と、周期及び振動時間とを測定し、この測定した振幅の減衰率に対応する粘性と、周期及び振動時間とに対応する弾性とを、それぞれ標準データから読み出す。
そして、粘性検出部82は、標準データから読み取った粘性及び弾性を、測定対象の試料100の粘性及び弾性として出力する。
上述したように、本実施形態によれば、試料100の粘性及び弾性を一括して測定することが可能となる。
【0081】
また、浮き回転子1に印加する回転磁場の回転方向と、回転トルク(モータ4の回転数ΩM)とを周期的に掃引することにより、浮き回転子1には周期的な回転トルクを印加することができる。
そして、この回転方向と回転トルクとを掃引する周期を変化させつつ、浮き回転子1の回転振動の振幅と位相とを、撮像画像から観察することにより、粘性と弾性とを独立して測定であることが可能となる。
すなわち、この回転振動の観察は、すでに述べた、磁場を消去した後の減衰振動を、周波数スペクトルとして検出するものであり、磁場を消去した後の粘性及び弾性の測定と原理的に同様である。
【0082】
次に、図1に示す粘性・弾性測定装置(力学物性測定装置)における具体的な応用例について説明する。
試料容器2は、内径が35mmであり、内部の側壁の高さ10mmのガラス製シャーレを用いた。そして、試料容器2に測定対象の物質である試料100を3cc入れた(試料100の温度は20℃)。
予め粘性の判っている標準試料としては、図5に示すように、1cP、2cP、5cP及び10cPの4種類を用いた。
そして、この標準試料の表面で回転させる浮き回転子1としては、直径30mmであり、厚さ0.1mmのアルミニウム板の円盤を用いた。
【0083】
次に、回転磁場制御部83は、モータ4を駆動して、磁石回転台7を回転させる。
この結果、第1磁石3_1及び第2磁石3_2が回転することにより、第1磁石3_1及び第2磁石3_2が生成する、試料容器2に入れた標準試料の液面に垂直な磁場を、回転させて回転磁場を生成する。この回転磁場により、浮き回転子1は回転トルクが印加され、印加された回転磁界の回転方向と同一方向に回転を行う。
そして、回転検出部81は、例えば、回転検出センサ(撮像素子)5が撮像する、浮き回転子1の回転する動画像を撮像画像として自身内部の記憶部に記憶し、画像処理によりマーク1Mの回転周期を求め、このマーク1Mの回転周期から浮き回転子1の回転数を求める。
【0084】
モータ4の回転数ΩMを変える毎に、対応する浮き回転子1の回転数ΩDを求め、図5に示すように、粘性の異なる標準試料毎に、浮き回転子1の回転数ΩDと、回転数ΩM及びΩMの差分との対応関係を求める。
図5において、各標準試料の浮き回転子1の回転数ΩDと、回転数ΩM及びΩMの差分との関係を示す直線は、原点(0)を通っている。このため、図5は、浮き回転子1の回転数と、浮き回転子1に印加される回転トルクの関係のみから粘性を求めることが可能であることを示している。
この結果、図6に示す粘性と、回転数ΩM及びΩMの差分及び回転数ΩDの比との対応如何形を示す直線も、原点を通り、この標準データを用いることにより粘性を正確に測定できることが分かる。
【0085】
また、図1における粘性測定部8の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより粘性及び弾性の「」測定の処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0086】
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0087】
以上、この発明の実施形態を図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0088】
1…浮き回転子
1M…マーク
2…試料容器
3_1…第1磁石
3_2…第2磁石
4…モータ
5…回転検出センサ
6…試料台
7…磁石固定台
8…粘性測定部
81…回転検出部
82…粘性検出部
83…回転磁場制御部
84…標準データ記憶部
【技術分野】
【0001】
本発明は、物質の力学物性である粘性及び弾性を測定するための粘性・弾性測定装置及びその方法に関する。
【背景技術】
【0002】
従来より、対象とする物質の力学物性を検出するため、粘性や弾性の測定が行われている(例えば、引用文献1参照)。
粘性・弾性測定は、医薬品、食品、塗料、インク、化粧品、化学製品、紙、粘着剤、繊維、プラスチック、ビール、洗剤、コンクリート混和剤、シリコン等の製造過程で、品質管理、性能評価、原料管理、研究開発に必要不可欠な測定技術である。
従来知られている粘性測定法には以下に示すような方法がある。
【0003】
(1)粘度管法、(2)振動子を接触させる方法、(3)表面弾性波を用いる方法 、(4)回転子を用いる方法、(5)剛体球を落下させる方法、(6)動的光散乱法、(7)Zimm型粘度測定法、(8)EMS(Electro Magnetically Spinning)粘度測定法などである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−69872号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した方法の内、(1)〜(5)の方法に関しては、数cc以上の多量の試料(測定対象の物質)が必要となるという欠点があった。
特に、(2)〜(5)の方法に関しては、少なくとも試料の粘度(粘性係数)が10cP以上でないと精度のよい計測が出来ないため、10cP未満よりも低粘度の材料の粘度を、正確に測定できないという欠点があった。
さらに(6)の方法に関しては、測定装置が大掛かりになり、また測定精度を維持できる程度に光を透過する必要があるため、透明試料以外には適用できない。
【0006】
また、(7)の方法に関しては円筒状の回転子が直立した状態で試料中に配置されることが必須の条件となる。
しかしながら、(7)の方法においては、浮力によって回転子を維持しようとした場合、回転子における試料に対する濡れ性などの不均一によって、回転子を直立に維持することが困難である。回転子の試料に対する濡れ性が、回転子の表面全体で均一でなければ、試料中において、回転子を直立させることはできない。
【0007】
また、(8)の方法に関しては、回転子と試料を入れた容器の底に回転子が接触して回転するため、回転子と容器との間の接触点における摩擦が粘度を測定するための誤差となる。
したがって、(8)の方法に関しては、摩擦の程度にもよるが、この摩擦により発生する測定誤差により、(2)〜(5)の方法と同様に、少なくとも10cP未満の粘度の試料に対して、高い精度の測定が行えないという欠点がある。
また、(8)の方法に関しては、容器内の試料中に完全に没している回転子の回転を観察するため、測定精度を維持できる程度に光を透過する必要があり、透明試料以外の試料、例えば黒色の試料に対して適用できないという欠点がある。
また、(8)の方法に関しては、レーザの散乱を用いて、試料中の回転子の回転を観察する場合、反射光として強い散乱光を発生するコロイドやスラリーなどの試料に対しては適用できない欠点がある。
【0008】
さらに、(7)及び(8)の方法に関しては、回転磁場を生成する磁石が試料を入れた容器の側壁に沿って回転するため、容器の側壁の外周部に磁石の回転する領域を確保する必要がある。このため、容器内の試料温度を制御する温度制御装置や、電場の印加装置などを構成する際に制約を受け、装置が大型化する欠点がある。
【0009】
上述した理由により、(1)〜(8)に記載した方法では、液体や他のソフトマテリアル(Soft material、あるいはSoft matter:ソフトマター)の粘性及び弾性といった普遍的な物理量(力学的な物理量)を、少量の試料で簡易に測定したり、あるいは低粘度の試料について高精度で測定を行うことが困難であり、かつ、装置を小型化することに制約があるなどの欠点がある。
【0010】
本発明は、このような事情に鑑みてなされたもので、検出対象の物質である試料の量が従来に比較して少なく、また装置が従来に比較して小型化でき、かつ10cP程度以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能な粘性・弾性測定装置及びその方法を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明の粘性・弾性測定装置は、粘性または弾性を検出する対象の検出対象物質が入れられた容器と、該検出対象物質に浮いた状態で配置され、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子と、前記浮き回転子に対して、前記検出対象物質の表面に垂直方向の磁場を印加する磁石と、該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる回転磁場制御部と、前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する粘性検出部とを有することを特徴とする。
【0012】
本発明の粘性・弾性測定装置は、前記回転磁場の回転軸に垂直な配置面において、前記磁石がN極とS極とが交互に複数配列されて構成されていることを特徴とする。
【0013】
本発明の粘性・弾性測定装置は、前記磁石が永久磁石から構成されており、前記回転軸を中心として、前記配置面に対して平行に回転させて、前記回転磁場を生成することを特徴とする。
【0014】
本発明の粘性・弾性測定装置は、前記磁石が、電磁石で構成されており、前記回転磁場制御部が、配列された前記電磁石が隣接した他の電磁石と異なる極性となるように、前記電磁石を駆動して前記回転磁場を生成することを特徴とする。
【0015】
本発明の粘性・弾性測定装置は、前記磁石が前記容器の上部あるいは下部に、前記検出対象物質の表面に平行に配置されていることを特徴とする。
【0016】
本発明の粘性・弾性測定装置は、前記浮き回転子が浮力、あるいは表面張力、または浮力及び表面張力の双方によって、前記検出対象物質の表面に浮いてることを特徴とする。
【0017】
本発明の粘性・弾性測定装置は、前記浮き回転子が、回転中心に凹状の回転位置固定部を有しており、前記回転軸に対して平行方向に形成された突起が、前記回転位置固定部に挿入されていることを特徴とする。
【0018】
本発明の粘性・弾性測定装置は、前記浮き回転子が、前記検出対象物質と接する下面が円錐形状に形成され、前記容器が、内部の底面が平面形状を有しており、前記浮き回転子の前記下面における円錐形状の最も厚い部分の厚さと最も薄い部分の厚さとの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする。
【0019】
本発明の粘性・弾性測定装置は、前記浮き回転子が、前記検出対象物質と接する下面が平面形状に形成され、前記容器が、内部の底面が円錐形状を有しており、前記容器の内部の前記底面における円錐形状のととの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする。
【0020】
本発明の粘性・弾性測定装置は、前記浮き回転子の回転数を検出する回転検出部をさらに有し、前記粘性検出部が、前記回転磁場の回転数及び前記浮き回転子の回転数の比とにより、前記検出対象物質の粘性を求めることを特徴とする。
【0021】
本発明の粘性・弾性測定装置は、粘度が分かっている複数の基準物質における前記浮き回転子の回転数、及び前記回転磁場との比と、前記複数の基準物質の粘度との対応関係を予め標準データとして記憶する標準データ記憶部を更に有し、前記粘性検出部が測定した検出対象物質における前記浮き回転子の回転数、及び前記回転磁場との比を、前記標準データと比較して、前記検出対象物質の粘性を求めることを特徴とする。
【0022】
本発明の粘性・弾性測定装置は、前記検出対象物質の表面に浮いた前記浮き回転子の下面と、前記容器の底面との試料距離を測定する距離測定部と、前記試料距離及び補正係数の関係を示す補正係数記憶部とをさらに有し、前記粘性検出部が、距離測定部の測定した試料距離に対応する前記補正係数を前記補正係数記憶部から読み出し、前記標準データから求めた粘性に乗算して、乗算結果を粘性として出力することを特徴とする。
【0023】
本発明の粘性・弾性測定装置は、前記回転検出部が、光学測定により、前記浮き回転子の回転数を検出することを特徴とする。
【0024】
本発明の粘性・弾性測定装置は、前記浮き回転子の上面にマークが付加されており、前記回転検出部が、前記マークの回転数を検出し、前記浮き回転子の回転数として出力することを特徴とする。
【0025】
本発明の粘性・弾性測定装置は、前記検出対象物質が、液体あるいはソフトマテリアルであることを特徴とする。
【0026】
本発明の粘性・弾性測定方法は、容器に粘性または弾性を検出する対象の検出対象物質を入れる過程と、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子を、前記検出対象物質に浮いた状態で配置し、前記浮き回転子に対して、磁石により前記検出対象物質の表面に垂直方向の磁場を印加する過程と、該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる過程と、前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する過程とを有することを特徴とする。
【発明の効果】
【0027】
この発明によれば、検出対象物質に浮き回転子を浮かせて、この浮き回転子に対して、浮き回転子の回転軸に平行な磁場を磁石により与え、この磁場を回転軸に対して回転させて回転磁場を生成させ、浮き回転子の回転状態により、検出対象物質の粘性を測定するため、浮き回転子を浮かせれば良いため、従来に比較して検出対象物質の量を少なくできる。
また、この発明によれば、検出対象物質の上面に対して垂直方向の磁場を与え、この磁場を回転させて回転磁場を生成するため、磁石を容器の側壁の外周部において回転させる必要が無く、容器の側壁の外周部に回転磁場を生成する装置の他の装置構成を設ける余裕ができ、従来に比較して装置を小型化することができる。
また、本発明によれば、浮き回転子が容器の底面と接することがないため、従来における回転子と容器との接触による測定誤差が発生せず、10cP以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能となる。
【図面の簡単な説明】
【0028】
【図1】この発明の第1の実施形態による粘性・弾性測定装置の構成例を示す図である。
【図2】試料容器2に試料100を入れ、浮き回転子1を試料100表面に浮かべた概念図である。
【図3】浮き回転子1の構成例を示す図である。
【図4】図1のA−A’における浮き回転子1の断面形状を示す図である。
【図5】複数の異なる粘性を有する標準試料における、モータ4の回転数ΩMと浮き回転子の回転数ΩDの差(ΩM−ΩD)と、浮き回転子の回転数ΩD各々との関係を示す図である。
【図6】粘性と、傾きの逆数ΩMD/ΩDとの対応を示す図である。
【図7】第1磁石3_1及び第2磁石3_2が回転することで生成する回転磁場により、浮き回転子1に対して、回転トルクを与える方法を説明する概念図である。
【図8】基準2次元平面に平行に置かれた磁石固定台7に対し、第1磁石3_1、第2磁石3_2、第3磁石3_3及び第4磁石3_4を配置した場合の磁場の状態を示す図である。
【図9】ヨーク10と、このヨーク10から突出したティース10a、10b、10c及び10dとが基準2次元平面上に配置された電磁石を示す図である。
【図10】浮き回転子1が試料容器2内において、試料容器2の内周面に接触せずに回転する機構を説明する図である。
【図11】弾性測定を説明する平面視における浮き回転子1の回転状態を示す図である。
【図12】モータ4の回転速度ΩMと、浮き回転子1が停止する回転角度θとの関係を示す図である。
【図13】弾性と、回転速度及び回転角度の比との関係を示す図である。
【発明を実施するための形態】
【0029】
<第1の実施形態>
以下、図面を参照して、本発明の第1の実施の形態について説明する。図1は、この発明の一実施形態による粘性・弾性測定装置の構成例を示す図である。
本実施形態による粘性・弾性測定装置は、浮き回転子1、試料容器2、第1磁石3_1、第2磁石3_2、モータ4、回転検出センサ5、試料台6、磁石固定台7及び粘性測定部8を備えている。以下、粘性・弾性測定装置により、物質の力学的物性としての粘性(すなわち粘性係数)を測定する場合について説明する。測定対象の物質としては、液体、あるいはソフトマテリアルである。ソフトマテリアルとは、高分子、液晶、コロイド(エマルション 例:乳液、乳剤、ゾルなど)、生体分子(生体膜、蛋白質、DNAなど)などの一連の分子性物質群である。
【0030】
試料容器2は、力学的物性としての粘性を測定する測定対象物質としての試料を入れる容器であり、例えば小型のシャーレなどである。
次に、図2は、試料容器2に試料100を入れ、浮き回転子1を試料100の表面に浮かべた概念図である。図2に示すように、試料容器2の内径は、試料100に浮かべる浮き回転子1の直径よりも僅かに大きければ良い。例えば、浮き回転子1が回転した際、試料容器2の内周面に接触しない距離が保てれば良い。また、試料100は、試料容器2において深さHの量が入れられるが、本実施形態の場合、浮き回転子1が試料容器2の底面に接触しなければ良く、例えば、H=0.5mm程度の深さがあれば良い。
【0031】
また、例えば、浮き回転子1として、直径10mmの円盤を用い、容器にH=0.5mmの深さに試料100を入れた場合、試料100は300μリットル程度で、十分な精度により粘性の測定を行うことができる。
したがって、従来に比較して、極めて微量な試料100により、粘性の測定が可能となる。ここで、浮き回転子1は、浮力、あるいは表面張力、または浮力及び表面張力の双方によって、試料100の表面において浮くことになる。
また、浮き回転子1は、上面(試料100に接している下面と逆の面)に、マーク1Mが付加されている。このマークは、後述するように、回転検出センサ5により検出可能であれば、印刷、テープの貼り付け、上面を加工して形成された凹部あるいは凸部などでも良い。
【0032】
次に、図3は浮き回転子1の構成例を示す図である。図3(a)は、円盤(円板)の形状をしており、浮き回転子1全体がアルミニウムなどの軽量の導電体の材料で形成されている。すなわち、測定する試料よりも比重の小さな導電体であれば何でも良い。
また、図3(b)は、円盤(円板)の外周部に深さaの側壁1Bが設けられ、測定する試料より比重の大きな導電体でも、試料100に対して浮かせることができ、測定する試料より比重浮き回転子1の材料として用いることができる。
【0033】
また、図3(c)及び図3(d)は、少なくとも一部が導電体で形成されている、浮き回転子1の構成例を示す図である。
図3(c)は、図3(a)の形状と同様であるが、浮き回転子1の一部分のみがアルミニウムなどの導電体を用いており、他の部分はプラスチックやビニールなどで構成することができる。例えば、図3(c)及び図3(d)において、1Cの導電体部分がアルミニウムなどの導電体で、浮き回転子1の他の部分を絶縁物で構成しても良い。この導電体部分1Cは、例えば浮き回転子1の上面に市販のアルミ箔などを貼着させて作成しても良い。
【0034】
これにより、市販のアルミ箔と市販のプラスチックなどの円板とから、容易に安価な浮き回転子1を形成することができ、市販のシャーレを試料容器2とすることにより、測定対象の試料100の種類を変更するごとに、浮き回転子1及び試料容器2をディスポーザブルに使用することができる。
この結果、生体材料などの粘性を測定した後、その生体材料が廃棄に特段の注意を要する場合、測定に用いた浮き回転子1及び試料容器2を焼却処理、あるいは滅菌処理を容易に行うことができる。
【0035】
次に、図4は、図2のA−A’における浮き回転子1の断面形状を示す図である。図4(a)は平面視で円形状である板状の浮き回転子1の断面構造を示している。図4(b)は、平面視で円形状である平板の下部、すなわち試料100に接する下面が円錐形状に形成されている。この円錐形状とすることにより、試料100のずり変形の大きさが下面全体で同様となるように、浮き回転子1の最も厚い部分の厚さamaxと、最も薄い部分の厚さaminとの比が設定されている。
また、浮き回転子1がこの図4(b)の形状である場合、試料容器2の浮き回転子1の円錐形状の下面と対向する底面は、平面とされる。
一方、浮き回転子1が図4(a)の形状である場合、試料容器2の浮き回転子1の平面である下面と対向する底面を、浮き回転子1の下面に向かって凸部がある円錐形状とすれば、同様に、浮き回転子1の下面全体における試料100のずり変形を一様とすることができる。
【0036】
図1に戻り、磁石固定台7は、回転磁場を発生させる磁石を固定する平板上の部材であり、例えば、第1磁石3_1と第2磁石とが上面に固定されている。この磁石固定台7は、試料容器2に入れられている試料100の表面(試料100が液体であれば液面)と平行となるように配置されている。
第1磁石3_1は、磁石固定台7の上面側にS極が接し、試料容器2と対向する上面がN極となるように配置されている。
第2磁石3_2は、磁石固定台7の上面側にN極が接し、試料容器2と対向する上面がS極となるように配置されている。
したがって、第1磁石3_1と第2磁石3_2とは、互いに異なる極性の極が試料容器2と対向する配置となっている。
第1磁石3_1と第2磁石3_2とは、それぞれが直方体であり、互いに平行に配置されている。
【0037】
試料台6は、試料100を入れる試料容器2を固定する平板上の部材であり、上面が磁石固定台7の上面と平行となるように配置されている。
これにより、試料容器2に入れられている試料100の上面と、第1磁石3_1と第2磁石3_2とが回転した際における、第1磁石3_1と第2磁石3_2との各々の上面とがなす平面とは、平行となる。
上述した試料台6、磁石固定台7、第1磁石3_1、第2磁石3_2の各々の配置から、第1磁石3_1及び第2磁石3_2により、試料容器2に入れられた浮き回転子1の上面に対して垂直方向の磁場(また、垂直となる磁場成分でも良い)を発生させることができる。
【0038】
モータ4は、磁石固定台7を、磁石固定台7の表面に平行な回転方向で回転させる駆動機構であり、回転軸4aが磁石回転台7の上面に対して軸方向が垂直に固定されている。
また、平面視において、浮き回転子1が試料容器2の内壁に接触せずに、試料100の上面(液面)上において回転する位置に、回転軸4aがくるように、試料容器2とモータ4との配置が設定されている。すなわち、平面視において。試料容器2の中心と、回転軸4aとが重なる位置に、試料容器2とモータ4とが配置されている。
【0039】
回転検出センサ5は、試料容器2の試料100に浮いている浮き回転子1の上面に付加されているマーク(図2におけるマーク1M)が検出できる位置として、試料容器2の上部方向の位置に配置され、このマークを例えば光学的に検出する。すなわち、回転検出センサ5は、光照射部からレーザ光を出射し、浮き回転子1の上面からの反射光を受光部で入射し、入射光の強度に対応した検出電気信号を出力する。ここで、浮き回転子1の上面よりマークの反射率が高い場合、マーク反射光を受光した期間の検出電気信号の電圧が高くなり、一方、浮き回転子1の上面よりマークの反射率が低い場合、マーク反射光を受光した期間の検出電気信号の電圧が低くなる。
また、回転検出センサ5の代わりに、レンズとCCD(Charge Coupled Device)などの撮像素子を顕微鏡に付加した撮像装置を設け、マークを拡大して撮像した撮像画像を出力するようにしても良い。
【0040】
粘性測定部8は、回転検出部81、粘性検出部82、回転磁場制御部83、標準データ記憶部84及び装置制御部85を有している。
回転検出部81は、回転検出センサ5から供給される検出電気信号により、マーク(図2の1M)の検出を行い、単位時間(例えば、1秒)当たりの検出回数を、単位時間当たりの回転数(rpm:revolutions per minute)として出力する。また、回転検出部8は、マーク検出において、回転検出センサ5の検出電気信号を用いるのではなく、撮像装置の撮像画像を用いる場合、撮像装置が撮像して出力する撮像画像から、浮き回転子1の上面のマークを画像処理により検出し、単位時間当たりの回転数を求めるようにしても良い。
【0041】
回転磁場制御部83は、設定された回転数でモータ4が回転するように、モータ4に対する回転制御を行う。これにより、モータ軸4aを介して磁石固定台7が回転することになり、第1磁石3_1と第2磁石3_2とにより発生する磁場が回転し、浮き回転子1を回転させる回転磁場が発生する。
【0042】
標準データ記憶部84は、モータ4の回転数と、粘度が判っている標準試料に浮かべられた浮き回転子1の回転数との比と、粘性(cP)との関係を示す粘性検出テーブルが記憶されている。
この粘性検出テーブルは、以下の様に作成されている。本実施形態の粘性・弾性測定装置において、粘度が予め判っている標準試料を装置容器2に入れ、標準試料の表面に浮き回転子1を浮かべ、予め設定した複数の回転数ΩMによりモータ4を回転させた場合に、各モータ4の回転数ΩMに対応した浮き回転子1の回転数ΩDを、上述した回転検出部81により測定する。この標準試料に対する回転数ΩDの測定を、複数の異なる粘性を有する標準試料(予め粘性の判っている試料)に対して行う。
【0043】
図5は、複数の異なる粘性を有する標準試料における、モータ4の回転数ΩMと浮き回転子の回転数ΩDの差(ΩM−ΩD)と、浮き回転子の回転数ΩD各々との関係を示す図である。横軸は回転数ΩMと回転数ΩDとの回転差ΩMD(回転数ΩM−回転数ΩD)であり、縦軸は回転数ΩDである。使用した各標準試料の粘性は、例えば、それぞれ異なり、1(cP)、2(cP)、5(cP)、10(cP)である。そして、この図5から粘性の異なる標準試料毎の回転差ΩMDと回転数ΩDとの関係、すなわち傾きΩD/ΩMDの対応を示す直線を最低二乗法などにより求める。この傾きの逆数ΩMD/ΩDは、粘性と比例するものである。
【0044】
次に、図6は、粘性と、傾きの逆数ΩMD/ΩDとの対応を示す図である。
図1に戻り、標準データ記憶部84には、粘性(cP)と、傾きの逆数ΩMD/ΩDとの対応を示す粘性検出テーブルが記憶されている。また、粘性検出テーブルではなく、粘性(cP)と、傾きの逆数ΩMD/ΩDとの対応を示す実験式が記憶されていても良い。
【0045】
粘性検出部82は、回転磁場制御部83に対して、異なる複数の回転数ΩMでモータ4を回転させる制御を行い、回転数を変更する毎に制御信号を回転検出部81へ出力する。
回転検出部81は、粘性検出部82から制御信号が供給される毎に、回転数ΩMにおいて試料容器2に入れた試料100の表面に浮かべた浮き回転子1の回転数ΩDを回転検出センサ5から入力する。
そして、回転検出部81は、検出した回転数ΩDを、制御信号に対応して粘性検出部82へ出力する。
【0046】
粘性検出部82は、上述した標準試料の場合と同様に、試料100における傾きΩD/ΩMD(=ΩM−ΩD)を求め、この傾きの逆数ΩMD/ΩDを求める。
そして、粘性検出部82は、標準データ記憶部84に記憶されている粘性検出テーブルから、試料100の逆数ΩMD/ΩDに対応する粘性(cP)を読み出し、これを試料100の粘性として出力する。ここで、標準データ記憶部84に実験式が記憶されている場合、粘性検出部82は、標準データ記憶部84から実験式を読み出し、この実験式に対して傾きの逆数ΩMD/ΩDを代入し、粘性を算出して求める。
【0047】
次に、図7を用いて、浮き回転子1に対して回転トルクを与える方法について説明する。図7は、第1磁石3_1及び第2磁石3_2が回転することで生成する回転磁場により、浮き回転子1に対して、回転トルクを与える方法を説明する概念図である。
図7において、第1磁石3_1のN極と、第2磁石3_2のS極とにより、ある基準面(ここでは、試料容器2に入れた試料100の上面、試料100が液体の場合、液面)に対して垂直な磁場が発生する。
この基準面を、x軸及びy軸からなる基準2次元平面(試料100の液面)とし、この2次元平面において回転する浮き回転子1の回転軸をz軸とする。
【0048】
以降、基準2次元平面あるいはその近傍の点(x,y,z)における磁場のz軸成分をBz(x,y)として示す。
すでに述べたように、磁場は、基準2次元平面に対して垂直であるため、z軸に依存しないと仮定しているが、z軸に依存しても以下の説明に支障はない。また、基準2次元平面に対して垂直な磁場の成分があれば、他に基準2次元平面に対して垂直でない磁場の成分が存在しても、浮き回転子1に対して回転トルクを与えることに支障とならない。
【0049】
図7は、z軸の軸成分が+の方向から第1磁石3_1及び第2磁石3_2の回転を観察している。磁石固定台7が反時計回りに、モータ4により回転させられると、磁場Bz(x、y)も反時計回りに回転することになり、反時計回りの回転磁場が生成される。
例えば、半空間x>0においてBz(x,y)>0であり、半空間x<0においてBz(x,y)<0となった時点の磁場を考える。
このとき、半空間y>0において、磁場の時間変化∂Bz/∂tは正(∂Bz/∂t>0)であり、一方、半空間y<0において、磁場の時間変化∂Bz/∂tは負(∂Bz/∂t>0)である。
【0050】
ここで、z軸を回転軸として、基準2次元平面(試料容器2に入れられた試料100の液面)、あるいは基準2次元平面近傍において、基準2次元平面に対して上面が平行となるように配置された浮き回転子1を考える。
このとき、回転磁場が浮き回転子1における導電体に印加されている場合、レンツの法則を考えると、浮き回転子1の導電体部分の内部には、半空間y>0においては時計回りの渦電流が流れ、半空間y<0においては反時計回りの渦電流が流れる。
上述したように、渦電流が基準2次元平面に平行に生成される場合、第1磁石3_1及び第2磁石3_2によって生成される磁場が基準2次元平面に対して垂直であるため、渦電流と磁場とにより、浮き回転子1の導電体に対してかかるローレンツ力は、基準2次元平面に対して平行に発生する。
【0051】
したがって、基準2次元平面において、x>0かつy>0の領域における任意のP点において生じるローレンツ力をFL1(Fx,Fy,0)とする。ここで、Fx>0及びFy>0である。
この場合、基準2次元平面において、x<0かつy<0の領域における浮き回転子1のz軸(浮き回転子1の回転軸)に対して対称の位置のQ点には、ローレンツFL2(−Fx,−Fy,0)が生じる。
【0052】
すなわち、ローレンツ力FL1(Fx,Fy,0)及びFL2(−Fx,−Fy,0)とにより、P点及びQ点に働く力は偶力となっている。
この結果、浮き回転子1の導電体には回転トルクが印加され、浮き回転子1はz軸を回転軸として反時計回りに回転することになる。
また、回転磁場が時計回りに回転すれば、渦電流における電流の流れる方向が、上述した回転磁場が反時計回りに回転する場合と逆となり、浮き回転子1も時計回りに回転することになる。
【0053】
さらに、回転磁場の回転に伴い、基準2次元平面において、x<0かつy>0の領域における任意の点に対しては、ローレンツ力FL3(Fx,−Fy,0)が印加される。
また、基準2次元平面において、x<0かつy>0の領域における任意の点に対し、x>0かつy<0におけるz軸に対照な点には、ローレンツ力FL4(−Fx,Fy,0)が印加される。したがって、このローレンツ力FL3及びローレンツ力FL4により浮き回転子1に対して反時計回りの回転トルクが発生する。
【0054】
上述したように、基準2次元平面に対して垂直な磁場が渦電流を生成し、この磁場が反時計回りに回転して生成される回転磁場と、生成される渦電流とにより、z軸を対象にした2つの点に対して反時計回りのローレンツ力が発生する。
この結果、浮き回転子1の導電体に発生する渦電流は、全体として反時計回りの回転トルクを受けることにより、導電体を介して浮き回転子1に対して回転トルクが印加されることになる。
【0055】
この浮き回転子1に印加される回転トルクの大きさは、回転磁場の回転数ΩM(モータ4の回転数と同様)と、浮き回転子1の回転数ΩDとの差に比例することになる。
したがって、試料容器2に入れられた試料100の上面(表面)に浮いている浮き回転子に対して、回転トルクが印加されることになる。この回転トルクが印加された結果、浮き回転子1は、試料100の表面において回転トルクの印加される方向に回転することになる。浮き回転子1の回転数ΩDが一定となった場合、この一定となった回転数ΩDは、試料100の粘性に反比例の関係を有する。
【0056】
例えば、説明を簡単とするため、浮き回転子1として半径Rの平面の円板が、試料容器2に入れられた試料100の表面に浮いて回転している状態を考える。このとき、浮き回転子1の下面と試料容器2の内部の底面との距離がdとする。ここで、浮き回転子1は、円板状の浮き回転子1と試料容器2の内部底面とが平行となるように、すでに述べた回転トルクが印加されるメカニズムにより、与えられる回転磁界により回転している。
この場合、浮き回転子1に印加される回転トルクTと、浮き回転子1の回転数ΩDと、試料100の粘性ηとの間には、以下の(1)式に示す関係がある。
【0057】
【数1】
【0058】
上記(1)式により、浮き回転子1に印加される回転トルクTと、試料100の表面に浮いて回転する浮き回転子1の回転数ΩDと、浮き回転子1の半径Rと、試料容器2に入れられた試料100の厚さ(深さ)dとにより、試料100の粘性ηを求められることが判る。
ここで、粘性ηの測定において、浮き回転子1に印加される回転トルクTは、予め粘性ηの判っている標準試料を用いて、すでに説明した図6のように、回転磁界の回転数ΩMと浮き回転子1の回転数ΩDとの回転数差ΩMDの関数として求めておく。
【0059】
また、予め粘性を測定する試料100の密度が判っていれば、この密度に対応して、共通サイズの試料容器2に入れた場合に深さdとなる適当な試料量を、はかりにより秤量することにより、密度の異なる試料100毎に、試料容器2に測定時に入れる試料100の深さdを均一にすることができる。
【0060】
さらに、試料容器2に試料100を入れる際、試料容器2の内部の底面からの、浮き回転子1の下面の高さを計測しながら、標準試料による図4を求めた際の高さd(距離d)となるように、液面センサによる計測された高さデータにより、試料容器2に対する試料100の滴下制御を行う構成を用いてもよい。このとき、試料容器2の側壁に対して、底面からの距離dの位置に適量マークを付加し、この適量マークと試料100の表面との位置を目視、あるいは上述した液面センサを用いて検出し、試料容器2に入れる試料100の滴下制御を行って、試料容器2における試料100の秤量としてもよい。
【0061】
上述した本実施形態によれば、検出対象の物質である試料100の量を、従来の測定にに比較して少なくすることができ、また回転磁界を生成する第1磁石3_1及び第2磁石3_2を、試料容器2下部方向に配置することができるため、装置が従来に比較して小型化することが可能である。
さらに、本実施形態によれば、浮き回転子1が測定する試料100表面に浮いているため、試料容器2と接触することによる測定精度の低下を防止することができ、10cP程度以下の低粘性の物質の粘度を従来に比較して高精度に測定することが可能となる。
【0062】
また、適当な量の試料100を試料容器2に対して滴下し、浮き回転子1の回転数の検出を行い、浮き回転子1の下面と、試料容器2の内部底面との高さdを検出し、これらの数値を用いて、(1)式を用いて、試料100の粘性を測定するようにしても良い。
【0063】
また、回転磁場を生成する磁石は、図1においては、第1磁石3_1と第2磁石3_2との2つの組み合わせを用いている。この場合、1つのN極と1つのS極との組み合わせで、磁場を発生している。
次に、図8は、基準2次元平面に平行に置かれた磁石固定台7に対し、第1磁石3_1、第2磁石3_2、第3磁石3_3及び第4磁石3_4を配置した場合の磁場の状態を示す図である。
この図8において、基準2次元平面において、第1磁石3_1がx>0かつy>0にS極が上面となり、第2磁石3_2がx<0かつy>0にN極が上面となり、第3磁石3_3がx<0かつy<0にS極が上面となり、第4磁石3_4がx>0かつy<0にN極が上面となるよう配置されている。
【0064】
この図8の配置により、すでに図7で説明したように、基準2次元平面に対して垂直な磁界が発生し、磁石固定台7を回転させることにより、浮き回転子1の導電体に対して回転磁場を印加することができる。この回転磁場により、浮き回転子1の導電体に発生する渦電流と、回転磁場とにより、浮き回転子1に回転トルクを与えることができる。
このように、複数のN極とS極との組み合わせ、図8においては、2つのN極とS極との組み合わせを用いて、磁場を生成してもよい。
【0065】
また、図9は、ヨーク10と、このヨーク10から突出したティース10a、10b、10c及び10dとが基準2次元平面上に配置された電磁石を示す図である。ティース10aと10cとには各々異なる巻方向に巻線CL1が巻かれ、同様に、ティース10bと10dとには各々異なる巻方向に巻線CL2が巻かれて、電磁石を構成している。
コイルCL1及びコイルCL2に電流を流し、基準2次元平面に対して垂直な磁場を生成し、流す電流の向きを周期的に変化させ、基準2次元平面に対して垂直な磁場を回転させて回転磁場を形成しても良い。
この場合、回転磁場制御部83が図9の電磁石における巻線CL1及びCL2に対して電流を流し、この流す電流の向きを周期的に変えて、回転磁場を生成させる処理を行う。
【0066】
また、浮き回転子1の回転数の観察は、すでに述べたように、光学センサあるいはCCD等の撮像素子を用い、浮き回転子1の上面に付加されたマークを検出することで行っている。
しかしながら、浮き回転子1の上面に対して、レーザを照射して回転による反射及び干渉パターンの変化を光学的に測定する構成としても良い。
また、浮き回転子1の1部を誘電体で置き換え、電極間に浮き回転子1が挟まれる電極を、図1などの磁石固定台7の回転の邪魔にならない位置に構成し、コンデンサを構成する。そして、回転検出部81は、マークとしての誘電体が電極間を通過する際、電極で構成したコンデンサの容量変化を検出し、所定の期間(たとえば、1秒)におけるこの容量変化の回数を検出し、浮き回転子1の回転数を検出するように構成しても良い。
【0067】
また、回転磁場制御83は、浮き回転子1に対し、印加する回転磁場の回転周期、および回転方向を任意に変化させるようにしても良い。
例えば、回転磁場の回転方向と、回転速度とを周期的に掃引することにより、浮き回転子1に対して、周期的に変化する回転トルクを与えることができる。
【0068】
次に、図10は浮き回転子1が試料容器2内において、試料容器2の内周面に接触せずに回転する機構を説明する図である。
図2に示すように、浮き回転子1を試料容器2内の試料100の表面において、回転磁場を与えて回転させる際、回転磁場の印加状態により、浮き回転子1の回転軸がずれる場合がある。ここで、平面視において、浮き回転子1の面積に比較して試料容器2の内部の面積が大きく作成すれば、浮き回転子1の回転軸がずれても、試料容器2の内部の側壁に接触することはない。しかしながら、試料容器2を大きく作成するため、粘性の測定に必要な試料100の量が多くなってしまう。
【0069】
このため、図10に示すように、浮き回転子1の上面に、浮き回転子1の回転軸に対して平行な方向に凸上の固定部1Pを生成する。この固定部1Pは中央に溝1PHが形成されており、この溝1PHに固定軸50が挿入され、浮き回転子1が回転自在となる回転機構が構成されている。この固定軸50は、浮き回転子1の回転軸に対して平行となるように、粘性・弾性測定装置のいずれかに固定されて設置されている。この固定軸50が実質的な浮き回転子1の回転軸となる。
【0070】
この浮き回転子1表面の固定部1Pと、固定軸50とにより、試料容器2に入れられた試料100の表面において、回転軸の位置を所定の場所で固定した状態で浮き回転子1を回転させることが可能となる。
これにより、図10の構成によれば、平面視において、試料容器2の内部の大きさを、浮き回転子1を回転させて粘性を測定するために必要な最小限の大きさとすることができ、従来に比較して試料容器2を小さくし、粘性の測定に必要な試料100の量を低減することが可能となる。
【0071】
次に、本実施形態による粘性・弾性測定装置を用いた弾性の測定について説明する。
本実施形態によれば、液体のように粘性を求めるのではなく、ゲルやゴムなどのように弾性率を有する物質、あるいは粘性の緩和により弾性率が生じる高分子溶液のような物質に対し、一定トルクを与えた際の静止位置からの変位により、粘性率及び弾性率を同時に測定することが可能である。
【0072】
ここで、弾性率は、いわばバネ定数であり、試料100の回転変形に比例した復元力に対応している。
したがって、粘性に加えて弾性がある場合、弾性率による復元力は、歪の程度に比例して大きくなる。このため、浮き回転子1は、回転開始してから、試料のバネ定数に比例した弾性力と、回転磁場による回転トルクが釣り合った回転角度θで回転を停止することになる。図11は、弾性測定を説明する平面視における浮き回転子1の回転状態を示す図である。磁石固定台7が反時計回りに回転することにより、すでに述べたように、反時計回りの回転トルクが浮き回転子1に印加される。
【0073】
そして、浮き回転子1に対して印加される回転トルクと弾性による反発力が釣り合う回転角度θの位置で、浮き回転子1の回転が停止する。
ここで、回転検出部81は、モータ4が回転しておらず、磁石固定台7が停止状態における浮き回転子1表面のマーク1Mの位置と、所定の回転数ΩMでモータ4が回転した後、回転が停止した際のマーク1Mの位置との各々の撮像画像から回転角度θを求める。
【0074】
次に、図12は、モータ4の回転速度ΩM(すなわち、回転トルク)と、浮き回転子1が停止する回転角度θとの関係を示す図である。図12おいて、横軸がモータ4の回転数ΩMを示し、縦軸が浮き回転子1の停止する回転角度θを示している。
すなわち、図1に示す粘性・弾性測定装置の場合、磁石固定台7がモータ4により回転することにより、この磁石固定台7に配置されている第1磁石3_1及び第2磁石3_2の磁石が、モータ4の回転速度に対応した回転磁場を生成する。
【0075】
そして、回転磁場制御部83は、予め設定されたステップに従い、モータ4の回転速度を変化させ、回転速度毎の回転角度θを求めて、回転数ΩMと回転角度θとの関係を求めて図12に示すグラフを作成する。ここで、予め弾性が判っている複数の標準試料に対して、粘性と同様に、弾性が未知の試料100の弾性測定に用いる標準データ作成するため、上述した処理を行う。粘性の標準データの作成時と同様に、標準試料を試料容器2に入れて、上述した回転角度θの測定を行う。
【0076】
次に、図13は、弾性と、回転速度及び回転角度の比との関係を示す図である。図13において横軸が弾性(弾性率:Pa)を示し、縦軸が回転速度ΩMと回転角度θとの比例係数を示している。ここで、粘性と回転角度θとは逆比例する。
この図13は、図12における各標準試料の傾き(回転速度ΩMと回転角度θとの比)と、対応する標準試料の粘性とを対応付けて作成した、弾性測定に用いる弾性の標準データである。
実際の未知の弾性の試料100の測定において、この測定対象の試料100を試料容器2に入れ、標準試料の場合と同様に、回転磁場制御部83がモータ4を予め設定した回転速度で回転させる。
【0077】
そして、回転検出部81は、各回転速度毎の回転角度θを求めて、粘性検出部82に対して出力する。
粘性検出部82は、回転検出部81から供給される回転速度ΩMと回転角度θとの比例係数を求め、この比例係数に対応する弾性のデータを、標準データ記憶部84の標準データから読み出し、読み出したデータを試料100の弾性として出力する。
【0078】
また、浮き回転子1に加える回転トルクを時間的に変化させることにより、弾性と粘性とを同時に測定することも可能である。この場合、回転磁場を生成する磁石を、図9に示す電磁石で構成する。
例えば、浮き回転子1に対し、電磁石に対して励磁電流を印加して所定の回転トルクを印加した後、この励磁電流の印加を停止し、停止した後の浮き回転子1の回転状態を観察する。
【0079】
このとき、浮き回転子1は、自身の浮いている試料100の弾性に応じて回転振動を起こすことになる。ここで、弾性に対して回転振動の周期及び振動時間が比例し、粘性に対して回転振動の振幅の減衰率が比例している。
したがって、予め粘性及び弾性の判っている複数の標準試料毎に、その回転振動の振幅の減衰率と、周期及び振動時間とを、浮き回転子1に対して回転磁界を印加することにより測定し、標準データを作成して標準データ記憶部84に予め記憶させておく。
【0080】
次に、実際の未知の粘性及び弾性を有する測定対象の物質を測定する際、粘性検出部82は、測定対象の物質である試料100の振幅の減衰率と、周期及び振動時間とを測定し、この測定した振幅の減衰率に対応する粘性と、周期及び振動時間とに対応する弾性とを、それぞれ標準データから読み出す。
そして、粘性検出部82は、標準データから読み取った粘性及び弾性を、測定対象の試料100の粘性及び弾性として出力する。
上述したように、本実施形態によれば、試料100の粘性及び弾性を一括して測定することが可能となる。
【0081】
また、浮き回転子1に印加する回転磁場の回転方向と、回転トルク(モータ4の回転数ΩM)とを周期的に掃引することにより、浮き回転子1には周期的な回転トルクを印加することができる。
そして、この回転方向と回転トルクとを掃引する周期を変化させつつ、浮き回転子1の回転振動の振幅と位相とを、撮像画像から観察することにより、粘性と弾性とを独立して測定であることが可能となる。
すなわち、この回転振動の観察は、すでに述べた、磁場を消去した後の減衰振動を、周波数スペクトルとして検出するものであり、磁場を消去した後の粘性及び弾性の測定と原理的に同様である。
【0082】
次に、図1に示す粘性・弾性測定装置(力学物性測定装置)における具体的な応用例について説明する。
試料容器2は、内径が35mmであり、内部の側壁の高さ10mmのガラス製シャーレを用いた。そして、試料容器2に測定対象の物質である試料100を3cc入れた(試料100の温度は20℃)。
予め粘性の判っている標準試料としては、図5に示すように、1cP、2cP、5cP及び10cPの4種類を用いた。
そして、この標準試料の表面で回転させる浮き回転子1としては、直径30mmであり、厚さ0.1mmのアルミニウム板の円盤を用いた。
【0083】
次に、回転磁場制御部83は、モータ4を駆動して、磁石回転台7を回転させる。
この結果、第1磁石3_1及び第2磁石3_2が回転することにより、第1磁石3_1及び第2磁石3_2が生成する、試料容器2に入れた標準試料の液面に垂直な磁場を、回転させて回転磁場を生成する。この回転磁場により、浮き回転子1は回転トルクが印加され、印加された回転磁界の回転方向と同一方向に回転を行う。
そして、回転検出部81は、例えば、回転検出センサ(撮像素子)5が撮像する、浮き回転子1の回転する動画像を撮像画像として自身内部の記憶部に記憶し、画像処理によりマーク1Mの回転周期を求め、このマーク1Mの回転周期から浮き回転子1の回転数を求める。
【0084】
モータ4の回転数ΩMを変える毎に、対応する浮き回転子1の回転数ΩDを求め、図5に示すように、粘性の異なる標準試料毎に、浮き回転子1の回転数ΩDと、回転数ΩM及びΩMの差分との対応関係を求める。
図5において、各標準試料の浮き回転子1の回転数ΩDと、回転数ΩM及びΩMの差分との関係を示す直線は、原点(0)を通っている。このため、図5は、浮き回転子1の回転数と、浮き回転子1に印加される回転トルクの関係のみから粘性を求めることが可能であることを示している。
この結果、図6に示す粘性と、回転数ΩM及びΩMの差分及び回転数ΩDの比との対応如何形を示す直線も、原点を通り、この標準データを用いることにより粘性を正確に測定できることが分かる。
【0085】
また、図1における粘性測定部8の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより粘性及び弾性の「」測定の処理を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0086】
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0087】
以上、この発明の実施形態を図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0088】
1…浮き回転子
1M…マーク
2…試料容器
3_1…第1磁石
3_2…第2磁石
4…モータ
5…回転検出センサ
6…試料台
7…磁石固定台
8…粘性測定部
81…回転検出部
82…粘性検出部
83…回転磁場制御部
84…標準データ記憶部
【特許請求の範囲】
【請求項1】
粘性または弾性を検出する対象の検出対象物質が入れられた容器と、
該検出対象物質に浮いた状態で配置され、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子と、
前記浮き回転子に対して、前記検出対象物質の表面に垂直方向の磁場を印加する磁石と、
該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる回転磁場制御部と、
前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する粘性検出部と
を有することを特徴とする粘性・弾性測定装置。
【請求項2】
前記回転磁場の回転軸に垂直な配置面において、前記磁石がN極とS極とが交互に複数配列されて構成されていることを特徴とする請求項1に記載の粘性・弾性測定装置。
【請求項3】
前記磁石が永久磁石から構成されており、前記回転軸を中心として、前記配置面に対して平行に回転させて、前記回転磁場を生成することを特徴とする請求項2に記載の粘性・弾性測定装置。
【請求項4】
前記磁石が、電磁石で構成されており、
前記回転磁場制御部が、配列された前記電磁石が隣接した他の電磁石と異なる極性となるように、前記電磁石を駆動して前記回転磁場を生成することを特徴とする請求項2に記載の粘性・弾性測定装置。
【請求項5】
前記磁石が前記容器の上部あるいは下部に、前記検出対象物質の表面に平行に配置されていることを特徴とする請求項1から請求項4のいずれか一項に記載の粘性・弾性測定装置。
【請求項6】
前記浮き回転子が浮力、あるいは表面張力、または浮力及び表面張力の双方によって、前記検出対象物質の表面に浮いてることを特徴とする請求項1から請求項5のいずれか一項に記載の粘性・弾性測定装置。
【請求項7】
前記浮き回転子が、
回転中心に凹状の回転位置固定部を有しており、前記回転軸に対して平行方向に形成された突起が、前記回転位置固定部に挿入されていることを特徴とする請求項1から請求項6のいずれか一項に記載の粘性・弾性測定装置。
【請求項8】
前記浮き回転子が、前記検出対象物質と接する下面が円錐形状に形成され、
前記容器が、内部の底面が平面形状を有しており、
前記浮き回転子の前記下面における円錐形状の最も厚い部分の厚さと最も薄い部分の厚さとの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする請求項1から請求項7のいずれか一項に記載の粘性・弾性測定装置。
【請求項9】
前記浮き回転子が、前記検出対象物質と接する下面が平面形状に形成され、
前記容器が、内部の底面が円錐形状を有しており、
前記容器の内部の前記底面における円錐形状の最も厚い部分の厚さと最も薄い部分の厚さとの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする請求項1から請求項7のいずれか一項に記載の粘性。弾性測定装置。
【請求項10】
前記浮き回転子の回転数を検出する回転検出部をさらに有し、
前記粘性検出部が、前記回転磁場の回転数及び前記浮き回転子の回転数の比とにより、前記検出対象物質の粘性を求めることを特徴とする請求項1から請求項9のいずれか一項に記載の粘性・弾性測定装置。
【請求項11】
粘度が分かっている複数の基準物質における前記浮き回転子の回転数、及び前記回転磁場との比と、前記複数の基準物質の粘度との対応関係を予め標準データとして記憶する標準データ記憶部を更に有し、
前記粘性検出部が測定した検出対象物質における前記浮き回転子の回転数、及び前記回転磁場との比を、前記標準データと比較して、前記検出対象物質の粘性を求めることを特徴とする請求項1から請求項10のいずれか一項に記載の粘性・弾性測定装置。
【請求項12】
前記検出対象物質の表面に浮いた前記浮き回転子の下面と、前記容器の底面との試料距離を測定する距離測定部と、
前記試料距離及び補正係数の関係を示す補正係数記憶部と
をさらに有し、
前記粘性検出部が、距離測定部の測定した試料距離に対応する前記補正係数を前記補正係数記憶部から読み出し、前記標準データから求めた粘性に乗算して、乗算結果を粘性として出力する
ことを特徴とする請求項1から請求項11のいずれか一項に記載の粘性・弾性測定装置。
【請求項13】
前記回転検出部が、光学測定により、前記浮き回転子の回転数を検出することを特徴とする請求項10または請求項11に記載の粘性・弾性測定装置。
【請求項14】
前記浮き回転子の上面にマークが付加されており、
前記回転検出部が、前記マークの回転数を検出し、前記浮き回転子の回転数として出力することを特徴とする請求項1から請求項13のいずれか一項に記載の粘性・弾性測定装置。
【請求項15】
前記検出対象物質が、液体あるいはソフトマテリアルであることを特徴とする請求項1から請求項14のいずれか一項に記載の粘性・弾性測定装置。
【請求項16】
容器に粘性または弾性を検出する対象の検出対象物質を入れる過程と、
導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子を、前記検出対象物質に浮いた状態で配置し、
前記浮き回転子に対して、磁石により前記検出対象物質の表面に垂直方向の磁場を印加する過程と、
該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる過程と、
前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する過程と
を有することを特徴とする粘性・弾性測定方法。
【請求項1】
粘性または弾性を検出する対象の検出対象物質が入れられた容器と、
該検出対象物質に浮いた状態で配置され、導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子と、
前記浮き回転子に対して、前記検出対象物質の表面に垂直方向の磁場を印加する磁石と、
該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる回転磁場制御部と、
前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する粘性検出部と
を有することを特徴とする粘性・弾性測定装置。
【請求項2】
前記回転磁場の回転軸に垂直な配置面において、前記磁石がN極とS極とが交互に複数配列されて構成されていることを特徴とする請求項1に記載の粘性・弾性測定装置。
【請求項3】
前記磁石が永久磁石から構成されており、前記回転軸を中心として、前記配置面に対して平行に回転させて、前記回転磁場を生成することを特徴とする請求項2に記載の粘性・弾性測定装置。
【請求項4】
前記磁石が、電磁石で構成されており、
前記回転磁場制御部が、配列された前記電磁石が隣接した他の電磁石と異なる極性となるように、前記電磁石を駆動して前記回転磁場を生成することを特徴とする請求項2に記載の粘性・弾性測定装置。
【請求項5】
前記磁石が前記容器の上部あるいは下部に、前記検出対象物質の表面に平行に配置されていることを特徴とする請求項1から請求項4のいずれか一項に記載の粘性・弾性測定装置。
【請求項6】
前記浮き回転子が浮力、あるいは表面張力、または浮力及び表面張力の双方によって、前記検出対象物質の表面に浮いてることを特徴とする請求項1から請求項5のいずれか一項に記載の粘性・弾性測定装置。
【請求項7】
前記浮き回転子が、
回転中心に凹状の回転位置固定部を有しており、前記回転軸に対して平行方向に形成された突起が、前記回転位置固定部に挿入されていることを特徴とする請求項1から請求項6のいずれか一項に記載の粘性・弾性測定装置。
【請求項8】
前記浮き回転子が、前記検出対象物質と接する下面が円錐形状に形成され、
前記容器が、内部の底面が平面形状を有しており、
前記浮き回転子の前記下面における円錐形状の最も厚い部分の厚さと最も薄い部分の厚さとの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする請求項1から請求項7のいずれか一項に記載の粘性・弾性測定装置。
【請求項9】
前記浮き回転子が、前記検出対象物質と接する下面が平面形状に形成され、
前記容器が、内部の底面が円錐形状を有しており、
前記容器の内部の前記底面における円錐形状の最も厚い部分の厚さと最も薄い部分の厚さとの比が、前記浮き回転子が回転する際、当該浮き回転子の前記下面と前記検出対象物質との界面において、前記検出対象物質に生じるずり変形の大きさが一様となる比で形成されていることを特徴とする請求項1から請求項7のいずれか一項に記載の粘性。弾性測定装置。
【請求項10】
前記浮き回転子の回転数を検出する回転検出部をさらに有し、
前記粘性検出部が、前記回転磁場の回転数及び前記浮き回転子の回転数の比とにより、前記検出対象物質の粘性を求めることを特徴とする請求項1から請求項9のいずれか一項に記載の粘性・弾性測定装置。
【請求項11】
粘度が分かっている複数の基準物質における前記浮き回転子の回転数、及び前記回転磁場との比と、前記複数の基準物質の粘度との対応関係を予め標準データとして記憶する標準データ記憶部を更に有し、
前記粘性検出部が測定した検出対象物質における前記浮き回転子の回転数、及び前記回転磁場との比を、前記標準データと比較して、前記検出対象物質の粘性を求めることを特徴とする請求項1から請求項10のいずれか一項に記載の粘性・弾性測定装置。
【請求項12】
前記検出対象物質の表面に浮いた前記浮き回転子の下面と、前記容器の底面との試料距離を測定する距離測定部と、
前記試料距離及び補正係数の関係を示す補正係数記憶部と
をさらに有し、
前記粘性検出部が、距離測定部の測定した試料距離に対応する前記補正係数を前記補正係数記憶部から読み出し、前記標準データから求めた粘性に乗算して、乗算結果を粘性として出力する
ことを特徴とする請求項1から請求項11のいずれか一項に記載の粘性・弾性測定装置。
【請求項13】
前記回転検出部が、光学測定により、前記浮き回転子の回転数を検出することを特徴とする請求項10または請求項11に記載の粘性・弾性測定装置。
【請求項14】
前記浮き回転子の上面にマークが付加されており、
前記回転検出部が、前記マークの回転数を検出し、前記浮き回転子の回転数として出力することを特徴とする請求項1から請求項13のいずれか一項に記載の粘性・弾性測定装置。
【請求項15】
前記検出対象物質が、液体あるいはソフトマテリアルであることを特徴とする請求項1から請求項14のいずれか一項に記載の粘性・弾性測定装置。
【請求項16】
容器に粘性または弾性を検出する対象の検出対象物質を入れる過程と、
導電体を構成要素とした板状で、かつ平面視で円形の浮き回転子を、前記検出対象物質に浮いた状態で配置し、
前記浮き回転子に対して、磁石により前記検出対象物質の表面に垂直方向の磁場を印加する過程と、
該磁石を駆動して前記浮き回転子に回転磁場を与え、前記浮き回転子における前記導電体内に誘導電流を誘起し、該誘導電流と該回転子に印加される磁場とのローレンツ相互作用により、該回転子に回転トルクを与えて回転させる過程と、
前記浮き回転子の回転状態により、前記回転子に接する検出対象物質の粘性・弾性を検出する過程と
を有することを特徴とする粘性・弾性測定方法。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−242137(P2012−242137A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−109833(P2011−109833)
【出願日】平成23年5月16日(2011.5.16)
【出願人】(801000049)一般財団法人生産技術研究奨励会 (72)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月16日(2011.5.16)
【出願人】(801000049)一般財団法人生産技術研究奨励会 (72)
[ Back to top ]