
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】着陸誘導対象機の検出を安定して実施する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、精測進入レーダに関し、追尾する航空機ごとドップラフィルタのフィルタ特性を可変設定する精測進入レーダに関する。
【背景技術】
【0002】
精測進入レーダ(PAR:Precision Approach Radar)は、航空機の着陸誘導に際して誘導対象機の位置および速度を精密測定する場合に使用され、通常は空港監視レーダ(ASR:Airport Surveillance Radar)および二次監視レーダ(SSR:Secondary Surveillance Radar)と併せて運用されている。
【0003】
航空機は空港へ着陸する際に、最終進入コースに入るまでは前述したASRおよびSSRによる誘導を受けており、空港から約10海里(NM:Nautical Mile)でPARに管制権が引き継がれる。
【0004】
PARでは、通常、航空機以外の雑音であるクラッタと目標である航空機からの反射信号との分離のために、複数のフィルタを設置し各フィルタで雑音を除去するマルチドップラフィルタ方式が使用され、個々のフィルタの周波数特性は固定値で設計されている。
【0005】
しかし、着陸誘導する対象航空機は機種や状況に応じて着陸における進入速度が異なるため、マルチドップラフィルタの周波数特性が個々の状況に応じて最適化された値となっていない場合が多く、目標の検出が困難になるという問題があった。
【0006】
これに対して、従来より具体的に知られている上記技術分野の内容としては、特許文献1乃至4がある。
【0007】
特許文献1に開示された技術は、PARと併せて運用されるASRおよびSSRのそれぞれから目標機の位置情報および速度情報を取得し、この取得した位置情報および速度情報に基づいてPARから出力される電波の照射方向を目標機の方向に設定する技術である。
【0008】
また、特許文献2に開示された技術は、PARから出力される送信ビーム数を状況に応じて増加させることによって、PARの目標機検出能力の向上および目標機が複数存在する場合の同時追尾を可能とする技術である。
【0009】
さらに、特許文献3に開示された技術は、予め設定された時間間隔で電波が出力されるPARで、現スキャンにおける目標機のドップラ周波数に基づいて次スキャン時に目標機がとり得る速度を予測し、電波の反射波から予測した速度の範囲の周波数帯を受信処理することで処理負荷を低減する技術である。
【0010】
さらに、特許文献4に開示された技術は、飛行中の航空機から地表に向けてレーダ照射を行い、この反射波から自機の高度を算出し、算出した高度情報と地点ごとの標高情報を保有するデジタル標高地図(DEM:Digital Elevation Model)との同期をとることによって自機の位置を特定する技術に関して、位置の特定に際して処理にかかる負荷を低減させる技術であるが、本発明とは目的が異なる。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】平3−242579
【特許文献2】特開2010−156547
【特許文献3】特開2000−346932
【特許文献4】特表2005−525557
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1乃至3に開示された技術は、目標機以外の反射による雑音を除去するフィルタの周波数特性が固定値であるため、機種ごとに異なる進入速度や気象条件など個々の状況に応じて最適な値となっていないという不都合があった。
【0013】
〔発明の目的〕
本発明は、上記関連技術の有する不都合を改善し、目標機の検出および位置測定を安定して実施することが可能な精測進入レーダを提供することをその目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するため、本発明の精測進入レーダは、着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにおいて、前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御手段を設け、前記目標物検出手段は、前記反射波以外の電波を雑音として遮断する目標物検出フィルタと、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御部とを備えたことを特徴とする。
【0015】
また、本発明に係る精測進入レーダ制御方法は、着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を追尾制御手段が算出し、前記追尾制御手段の算出したドップラ周波数の予測値を目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数をフィルタ係数制御部が可変設定し、前記中心周波数に基づいて前記反射波以外の電波を雑音として目標物検出フィルタが遮断するようにしたことを特徴とする。
【0016】
更に、本発明に係る精測進入レーダ制御用プログラムは、着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御機能、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御機能、前記中心周波数に基づいて前記反射波以外の電波を雑音として遮断する目標物検出フィルタ機能、を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする。
【発明の効果】
【0017】
本発明は上述したように構成したので、これによると、予め別に設置された他のレーダから航空機の位置情報および速度情報を取得し、取得した位置情報に基づいて電波の送信方向を予め算出すると共に取得した速度情報に基づいてドップラ周波数の予測値を算出し、算出したドップラ周波数の予測値が中心周波数となるようなフィルタ係数をフィルタ係数制御部が算出して目標物検出フィルタに可変設定することによって、精測進入レーダにおけるクラッタの除去および受信信号レベルを最適化し、誘導対象機の検出及び位置測定を安定して実施し、着陸誘導管制を行うオペレータの負担を軽減することのできる優れた精測進入レーダ、精測進入レーダ制御方法および精測進入レーダ制御用プログラムを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る精測進入レーダの一実施形態を示すブロック図である。
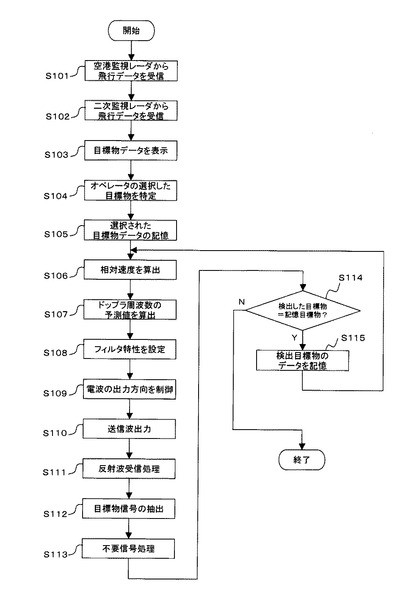
【図2】図1に開示したブロック図の全体の動作を示したフローチャートである。
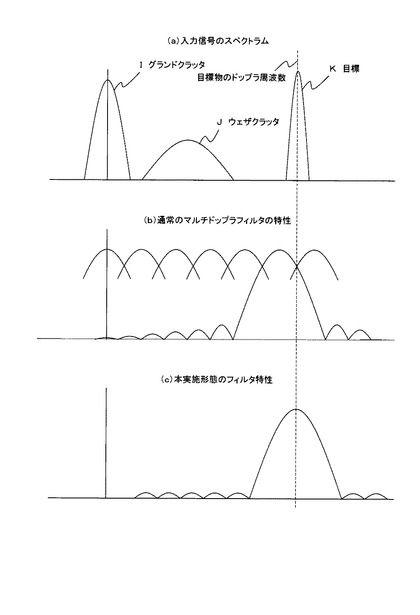
【図3】図1に開示したブロック図における目標物検出フィルタ11のフィルタ特性をこれまでのマルチドップラフィルタと比較した説明図であり、(A)入力信号である受信ビデオBのスペクトラムの示した図、(B)これまでのマルチドップラフィルタのフィルタ特性を示した図、(C)目標抽出フィルタ11のフィルタ特性を示した図である。
【図4】本発明に係る精測進入レーダのその他の実施形態の一例を示すブロック図である。
【発明を実施するための形態】
【0019】
〔第1実施形態〕
以下、本発明に係る精測進入レーダの一実施形態を、図1乃至図3に基づいて説明する。
【0020】
まず最初に、本実施形態の精測進入レーダの基本的内容を図1および図2に基づいて説明する。
【0021】
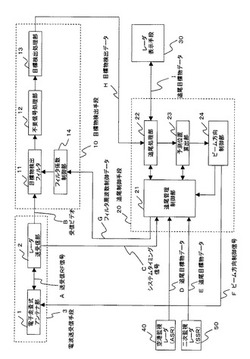
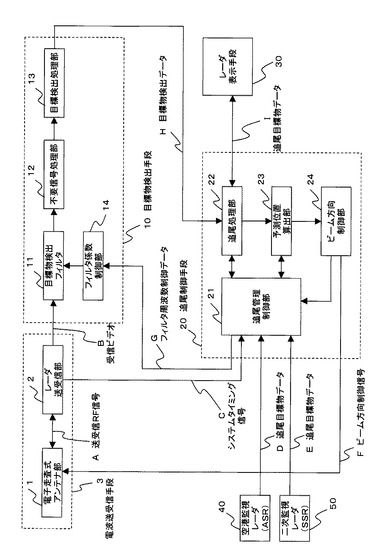
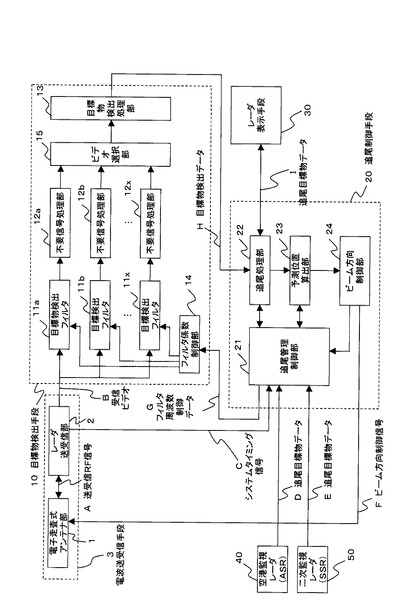
図1に示すように、本実施形態の精測進入レーダ(PAR:Precision Approach Radar)は、電子走査式アンテナ1と、レーダ電波を送受信するレーダ送受信機2と、受信ビデオBから目標物の位置や速度などを検出して目標物検出データHとして出力する目標物検出手段10と、目標物の位置を追尾し、次走査時の目標物の位置を予測して、電子走査式アンテナ1にビーム方向制御信号Fを出力すると共に次走査時に予想される目標物のドップラ周波数からクラッタ抑圧および目標物抽出処理におけるドップラフィルタに対して最適値を設定する追尾制御手段20、目標物データの表示と最終着陸機を追尾目標物として選択する機能を有するレーダ表示手段30と、空港監視レーダ(ASR:Airport Surveillance Radar)40と、二次監視レーダ(SSR:Secondary Surveillance Radar)50から構成される。
【0022】
前述の追尾制御手段20は、ASR40およびSSR50から出力される追尾目標物データDおよびEを入力し、レーダ表示手段30において、PARで追尾を行う対象として指定された目標物の位置、速度、コースを算出し、さらに電子走査式アンテナ1のビーム指向方向を算出して、電子走査式アンテナ1へ出力してビーム放射方向の制御を行う。さらにPARに対する目標物の相対速度を算出し、ドップラ周波数を求め、フィルタ周波数制御データGとして目標物検出手段10へ出力する。
【0023】
また、前述した目標物検出手段10は、追尾制御手段20から指示された追尾目標物のドップラ周波数にクラッタ除去および目標物抽出処理におけるフィルタの中心周波数を設定して、このフィルタにより降雨によるクラッタを除去し、追尾目標物の信号を抽出し、目標物の検出を行う。
【0024】
これにより、追尾開始時から追尾目標物に対するクラッタ抑圧および目標抽出処理におけるフィルタ諸元を追尾目標物毎に最適値に設定することができるため、安定して目標物の追尾開始が可能となる。また、ASR40およびSSR50からの追尾目標データに基づいて追尾を開始した後は、PARで取得した追尾目標物データを使用して、ビーム放射方向の制御、および追尾毎にフィルタの値を決定して、追尾目標物の目標物検出を継続していく。
【0025】
このため、追尾目標物毎に最適なドップラフィルタを形成することにより、最大の受信信号レベルを得ることを可能とし、PARにおける目標物検出を安定して実施することが可能となる。
【0026】
次に、上記実施形態について、さらに詳細に説明する。
【0027】
まず、上述したように本実施形態の精測進入レーダは、着陸態勢の航空機に向けて電波を送信すると共にこの電波の反射波を受信する電波送受信手段3と、この電波送受信手段3で受信した反射波から航空機の位置情報および速度情報を算出する目標物検出手段10と、目標物検出手段10で算出した位置情報および速度情報に基づいて航空機の機首領域に向けて電波を送信するように電波送受信手段3を制御する追尾制御手段20と、目標物検出手段10で算出した位置情報および速度情報を進入機情報として画面上に管制用として表示するレーダ表示手段30とを備えている。
【0028】
前述した電波送受信手段3は、予め設定された時間間隔で高周波(RF:Radio Frequency)信号A(送信信号)を生成し電子走査式アンテナ1に出力すると共にこの電子走査式アンテナ1から伝送されるRF信号A(受信信号)を受信処理し受信ビデオBとして出力するレーダ送受信部2と、前述した追尾制御手段20から出力される電波の送信方向を制御信号する信号であるビーム方向制御信号Fに基づいて電波の送信方向を設定し、この方向に向けて上述したRF信号A(送信信号)を電波として出力すると共にこの電波の反射波を受信しRF信号A(受信信号)としてレーダ送受信部2に伝送する電子走査式アンテナ部1とを備えている。
【0029】
また、前述した目標物検出手段10は、レーダ送受信部2から出力された受信ビデオBに基づいて降雨や地表による反射など航空機以外の反射による雑音の周波数成分を除去する目標物検出フィルタ11と、この目標物検出フィルタ11によって雑音が除去された受信ビデオに基づいて、航空機以外の不要信号を誤って検出してしまう確率を一定に保ちつつ不要信号に埋もれた航空機の反射信号を検出する定誤警報(CFAR:Constant False Alarm Rate)処理を行う不要信号処理部12と、この不要信号処理部12によってCFAR処理された受信ビデオに基づいて航空機の反射信号を検出し、検出した反射信号に基づいて航空機の位置情報および速度情報を算出し目標物検出データIとして追尾制御手段20に出力する目標物検出処理部13とを備えている。
【0030】
これにより、航空機以外の雑音が含まれた反射信号から、目標物検出フィルタ11によって雑音となるクラッタ成分を除去し、CFAR処理部12によって定誤警報処理され、目標物検出処理部13によって航空機の速度情報および位置情報を算出し、算出した速度情報および位置情報を含んだ目標物検出データIを追尾制御手段20に出力することができる。
【0031】
さらに、目標物検出手段10は、追尾制御手段20の算出したフィルタ周波数制御データGからドップラ周波数を抽出し、このドップラ周波数を目標物検出フィルタ11が検出する電波の周波数帯の中心周波数となるようなフィルタ係数を算出し、この算出したフィルタ係数を目標物検出フィルタ11に可変設定するフィルタ係数制御部14を備えている。
【0032】
前述した目標物検出フィルタ11は、フィルタ係数制御部14から設定されるフィルタ係数によって、受信ビデオBから特定の周波数帯以外の信号を雑音として遮断する機能を有している。
【0033】
また、前述のフィルタ係数制御部14は、フィルタ係数と遮断周波数との対応関係を予め記憶したフィルタ係数記憶機能を図示しない形で有していると共に、このフィルタ係数記憶機能の記憶内容に基づいて中心周波数を通過させるようなフィルタ係数を算出するものとする。
【0034】
これによって、フィルタ係数制御部14は、追尾制御手段20の算出したドップラ周波数の予測値が中心周波数となるように目標物検出フィルタ11を制御することができ、個々の状況あわせて目標物検出フィルタ11のフィルタ特性を変更することができる。
【0035】
前述した目標物検出処理部13は、検出した反射信号に基づいて航空機のドップラ周波数を検出し、この検出したドップラ周波数から航空機の速度情報を算出する機能と、ドップラ周波数を検出した時間と前述した電子走査式アンテナ1から電波を送信した時間との差分により航空機の位置情報を算出する機能とを有している。
【0036】
前述の追尾制御手段20は、予め別に装備されたASR40から航空機の位置情報および速度情報を含んだ追尾目標物データDを取得する機能と、予め別に装備されたSSR50から航空機の位置情報および速度情報を含んだ追尾目標物データEを取得する機能とを有している追尾管理制御部21を備えている。
【0037】
さらに、前述の追尾監視制御部21は、ASR40から取得した追尾目標物データDおよびSSR50から取得した追尾目標物データEとに基づいて電子走査式アンテナ1における電波の送信方向を算出しビーム方向制御信号Fとして電子走査式アンテナに送信する機能と、目標物検出フィルタ11に入力される受信ビデオBに含まれる航空機のドップラ周波数の予測値を算出しフィルタ係数制御部14にフィルタ周波数制御データGとして送信する機能と、レーダ送受信部2から電波の生成タイミングを制御するシステムタイミング信号Cを取得する機能とを有している。
【0038】
これにより、追尾管理制御部21はASR40およびSSR50からの位置情報および速度情報に基づいてPARにおける航空機のドップラ周波数の予測値を算出することができ、フィルタ係数制御部14はこの算出したドップラ周波数の予測値に基づいて目標物検出フィルタ11のフィルタ係数を算出することができる。
【0039】
さらに、追尾制御手段20は、目標物検出手段10で算出した位置情報および速度情報とシステムタイミング信号Cとに基づいて次の電波送信タイミングにおける航空機の予測位置を算出する予測位置算出部23と、この予測位置算出部23の算出した位置の方向に電波を送信するように電子走査式アンテナ1に対してビーム方向制御信号Fを出力するビーム方向制御部24とを備えている。ここで、前述した予測位置算出部23は、航空機の機首領域を航空機の位置として算出するものとする
【0040】
これにより、予測位置算出部23は次の電波送信タイミングにおける航空機の予測位置を算出し、ビーム方向制御部24は予測位置算出部23の算出した航空機の機首領域に電子走査式アンテナ部1から出力される電波の送信方向を向けることができ、航空機の追尾を安定して実施することができる。
【0041】
また、前述のレーダ表示手段30は、目標物検出処理部13の算出した航空機の位置情報および速度情報を進入機情報として管制用にレーダ画面上に表示する機能と、このレーダ画面上に表示した進入機情報から着陸誘導を行う追尾対象機をオペレータが選択した場合にこの選択された対象機を特定し追尾目標物データIとして追尾制御手段20に送信する追尾対象特定機能とを有している。
【0042】
前述した追尾管理制御部21は、追尾対象特定機能によって特定した対象機の進入機情報を記憶する記憶機能を有している。また、追尾制御手段20は、前述した目標物検出手処理部13から取得した進入機情報と記憶機能に記憶された進入機情報との相関をとり目標物検出処理部13で検出した進入機は追尾対象機であるか否か判定する追尾対象判定機能と、この追尾対象判定機能で追尾対象機であると判定された場合に記憶機能に記憶された進入機情報を目標物検出処理部13で検出した進入機情報に更新する更新機能とを有する追尾処理部22を備えている。
【0043】
これにより、オペレータの選択した航空機の進入機情報を記憶機能が記憶し、目標物検出手段10で検出した航空機の進入機情報と記憶機能の進入機情報との相関をとり検出した航空機が追尾対象機であるか否か追尾対象判定機能が判定し、追尾対象機で会った場合には記憶機能の内容を検出した航空機の進入機情報の更新することで、オペレータから選択された対象機を追尾し続けることができる。
【0044】
〔第1実施形態の動作〕
次に、PARの全体的な動作の基本的内容を図2に基づいて説明する。
【0045】
まず、ASR40とSSR50からの追尾目標データは追尾管理制御部21に入力され(図2:ステップS101/ASR受信工程、図2ステップS102/SSR受信工程)、レーダ表示部30に、その情報が表示される(図2:ステップS103/進入機情報表示工程)。オペレータは、表示された情報によりPARで着陸誘導を行う目標を選択し、選択された対象機を特定する(図2:ステップS104/選択対象特定工程)。
【0046】
目標が選択されると、追尾管理制御部21において、ASR40とSSR50から入力された追尾目標物データから目標物の位置、速度、コースを求めて、PARに対する相対速度を算出し(図2:ステップS106/相対速度算出工程)、ドップラ周波数を計算し(図2:ステップS107/ドップラ周波数算出工程)、フィルタ係数制御器14に出力する。フィルタ係数制御器14は、入力されたドップラ周波数が中心周波数となるように目標抽出フィルタ11を制御する(図2:ステップS108/フィルタ制御工程)。
【0047】
ビーム方向制御部24は、追尾管理制御部21がASR40とSSR50から入力された追尾目標データから求めた目標の位置情報からPARの空中線ビーム方向を算出して、レーダ送受信機2からシステムタイミング信号Cに合わせて電子走査式アンテナ1へビーム方向制御信号Fを出力して、ビーム方向の制御を実施する(図2:ステップS109/ビーム出力方向制御工程)。
【0048】
レーダ送受信機2は、システムタイミング信号Cにあわせてレーダ信号を送信を行い(図2:ステップS110/送信波出力工程)、目標から反射された反射信号は、電子式走査アンテナ1で受信され、レーダ送受信機2によって受信処理されて受信ビデオとして目標物検出手段10に入力される(図2:ステップS111/受信処理工程)。
【0049】
目標物検出手段10では、前述のとおり追尾目標のドップラ周波数にセットされた目標抽出フィルタ11により、降雨などによるクラッタ成分が除去されて、目標の信号が抽出される。その後、CFAR処理部12において定誤警報受信処理を行った後、目標物検出処理部13により受信ビデオ信号Bから目標物検出を行う。
【0050】
目標物検出手段10から出力された目標物検出データHは、追尾制御手段20の追尾処理部22に入力される。追尾処理部22において、入力された目標物検出データHは、追尾管理制御部21に記憶された追尾対象目標を比較して相関が得られた場合、予測位置算出部23において、次のビーム放射タイミングでも目標物の位置、速度、コースを求めて、算出結果を追尾管理制御部21に出力する。
【0051】
追尾管理制御部21では、入力されたデータを記憶し、次のビーム放射におけるビーム方向制御のために、ビーム方向制御部24に出力する。
【0052】
これにより、ASR40とSSR50から入力した進入機情報に基づきPARで追尾を行う航空機のPARに対するドップラ周波数を算出して、算出した周波数をクラッタ抑圧および目標抽出処理におけるドップラフィルタに設定することによりクラッタの除去および受信信号レベルを最適化し、目標物検出および位置測定を安定に実施することを可能としている。
【0053】
次に、上記一実施形態の動作について、さらに詳細に説明する。
【0054】
まず、追尾管理制御部21は、上述したようにASR40から航空機の位置情報および速度情報を追尾目標データDとして取得する(図2:ステップS101/ASR受信工程)と共に、SSR50からも追尾目標データEを取得する(図2ステップS102/SSR受信工程)。
【0055】
続いて、追尾管理制御部21は、取得した航空機の飛行情報を進入機情報として表示するように追尾処理部22を介してレーダ表示手段30を制御し、レーダ表示手段30のレーダ画面上に航空機の飛行情報が表示される(図2:ステップS103/飛行情報表示工程)。
【0056】
オペレータはレーダ表示手段30に表示された進入機情報から着陸誘導を実施する対象機を選択すると、レーダ表示手段30はオペレータによって選択された対象機を特定し(図2:ステップS104/選択目標特定工程)、特定した対象機を追尾目標物データIとして追尾処理部22に送信し、尾処理部22は選択対象特定機能の受け付けた対象機の位置情報および速度情報を追尾管理制御部21の記憶機能に保存する。
【0057】
一方、追尾管理制御部21は、ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEからオペレータによって選択された対象機の進入機情報を抽出し、抽出した進入機情報に基づいて対象機の位置情報、速度情報およびコース情報を算出して電子走査式アンテナ部1に対する相対速度を算出する(図2:ステップS106/相対速度算出工程)。
【0058】
さらに、追尾管理制御部21は、算出した相対速度から対象機のドップラ周波数を算出し(図2:ステップS107/ドップラ周波数算出工程)、算出したドップラ周波数をフィルタ周波数制御データGとしてフィルタ係数制御器14に出力する。
【0059】
フィルタ係数制御器14は、フィルタ周波数制御データGに基づいてドップラ周波数が目標物検出フィルタ11の通過周波数帯の中心周波数となるようなフィルタ係数を算出し、算出したフィルタ係数を設定するように目標抽出フィルタ11を制御する(図2:ステップS108/フィルタ制御工程)。
【0060】
これによって、図3(c)に示すようなフィルタ特性が目標物検出フィルタ11に設定され、図3(b)で示すようなこれまでのフィルタ特定では除去することが困難であった図3(a)に示すような地表および海面からの反射であるグランドクラッタIや降雨などによる反射であるウェザクラッタJを除去し、目標信号Kのみを抽出することができる。
【0061】
さらに、追尾管理制御部21は、上記算出した相対速度の他に位置情報を算出し、電子走査式アンテナ1から出力される電波の送信方向が対象機の機首領域に向くような空中線ビーム方向を算出し、算出した空中線ビーム方向をビーム方向制御部24に出力する。
【0062】
ビーム方向制御部24は、予測位置算出部23の算出した空中線ビーム方向に基づいて電波送信方向を制御するビーム方向制御信号Fを、レーダ送受信部2から送信される電波の出力タイミングを制御するシステムタイミング信号Cに合わせて電子走査式アンテナ部1に対して送信し、ビーム方向の制御を実施する(図2:ステップS109/ビーム出力方向制御工程)。
【0063】
これによって、オペレータの選択した着陸誘導対象機の飛行する方向に向けて、電子走査式アンテナ1は、電波が照射することができる。
【0064】
前述のレーダ送受信機2は、生成した送信RF信号を、システムタイミング信号Cにあわせて電子走査式アンテナ部1に送信し、電子走査式アンテナ部1はレーダ送受信部2から送信された送信RF信号を電波として空中線部から出力する(図2:ステップS110/送信波出力工程)。
【0065】
前述の電波は、対象機、地表、海面および雨によって反射され、反射波として電子走査式アンテナ部1で受信され、受信された反射波は受信RF信号としてレーダ送受信部2に伝送される。レーダ送受信部2は、電子走査式アンテナ部1から伝送された受信RF信号を受信処理し、受信ビデオ信号Bに変換して目標物検出手段10に入力される(図2:ステップS111/受信処理工程)。
【0066】
目標物検出手段10に入力された受信ビデオBは、前述のとおり透過する中心周波数が対象機のドップラ周波数にセットされた目標抽出フィルタ11により、降雨などによるクラッタ成分が除去されて対象機の信号が抽出される。
【0067】
目標物検出フィルタ11によってクラッタ成分が除去された受信ビデオBは、CFAR処理部12において定誤警報受信処理を行った後、目標物検出処理部13により航空機による反射信号の検出を行う。目標物検出部13は、航空機の位置情報および速度情報が算出され目標物検出データHとして追尾制御手段20に対して出力する。
【0068】
前述の目標物検出フィルタ11のフィルタ特性は、オペレータによって対象機として選択された航空機のドップラ周波数に合わせたフィルタ特性となっているため、対象以外の雑音であるクラッタ成分が除去され、対象機を容易に検出することができる。
【0069】
追尾制御手段20の追尾処理部22は、追尾管理制御部21に記憶されたオペレータによって選択された着陸誘導対象機の情報を取得し、取得した情報と目標物検出手段10から出力された目標物検出データHとを比較する。
【0070】
前述の追尾処理部22は記憶機能に記憶された進入機情報と目標物検出データHの進入機情報とを比較した結果、相関関係が得られた場合、目標物検出データHは対象機であると判定し、予測位置算出部23は目標物検出データHに基づいて、次にシステムタイミング信号Cがレーダ送受信部2から出力される時間における対象機の位置情報、速度情報およびコース情報を算出し、算出結果を追尾管理制御部21に出力する。
【0071】
追尾管理制御部21は、予測位置算出部23の算出した対象機の予測情報を記憶機能に保存し、算出した位置の方向に電子走査式アンテナ部1が電波を照射するようにビーム方向制御部24を制御する。
【0072】
これによって、航空機からの反射信号の検出が容易となり、さらに追尾対象の検出も容易となるため、オペレータの選択した追尾対象機の追尾が安定して実施することができ、管制業務を行うオペレータの負担を軽減することができる。
【0073】
ここで、上述した一実施形態における動作にあって、上記工程で実行される各実行内容をプログラム化し、これをコンピュータに機能させるように構成してもよい。なお、この場合、本プログラムは、非一時的な記録媒体、例えば、DVD、CD、フラッシュメモリなどに記録されてもよい。その場合、本プログラムは、記録媒体からコンピュータによって読み出され、実行される。
【0074】
(第1実施形態の効果)
以上のように、本実施形態では、ASR40およびSSR50から入力された航空機の飛行情報に基づいて追尾管理制御部21が精測進入レーダにおけるドップラ周波数の予測値を算出し、算出したドップラ周波数の予測値を中心周波数としてフィルタ係数制御部14が目標物検出フィルタ11に対して設定することで、クラッタの除去および受信信号レベルを最適化し、目標物の検出および位置測定を安定して実施することができる。
【0075】
〔その他の実施形態〕
上述したように、一実施形態では、フィルタ係数制御部14が、追尾管理制御部21によって算出されたドップラ周波数の予測値が中心周波数となるようなフィルタ係数を目標物検出フィルタ11を設定する場合を例示した。これに対し、目標物検出フィルタを複数設置してマルチフィルタ化し中心周波数を所定の周波数分ずつずらすように設定し、受信信号レベルが最大の目標物検出フィルタを選択するようにしてもよい。
【0076】
図4に示すように、目標物検出フィルタ11と同等の機能を有する目標物検出フィルタ11a乃至11xを複数設置しマルチフィルタ化して、ビデオ信号選択部15により、各目標物検出フィルタからの信号レベルが最大のものを選択して目標物検出を行う。
【0077】
前述したマルチフィルタ11a乃至11xの各フィルタの周波数設定は次にように設定する。まず、前述の一実施形態と同様にASR40およびSSR50から入力した航空機の飛行情報から算出したドップラ周波数の予測値をマルチフィルタとして構成された目標抽出フィルタ11a乃至11xの中心に設定して対象機の速度変動に対応可能なように前後のフィルタに対しては、所定の周波数分ずらした周波数を設定する。
【0078】
例えば、目標物検出フィルタの数を11個(11a乃至11k)とし、追尾制御手段20の算出したドップラ周波数の予測値が中心周波数となるように目標物検出フィルタ11fに設定する。目標物検出フィルタ11gは、目標物検出フィルタ11fに設定した中心周波数から1ノットに対応する周波数分増加させた周波数を中心周波数として設定する。一方、目標物検出フィルタ11eは、目標物検出フィルタ11fに設定した中心周波数から1ノットに対応する周波数分減少させた周波数を中心周波数として設定する。
【0079】
同様に目標物検出フィルタ11fよりも添字がz寄りの目標物検出フィルタh乃至kには、1ノットに対応する周波数分増加させた周波数を中心周波数として設定し、目標物検出フィルタ11fよりも添字がa寄りの目標物検出フィルタa乃至dには、d,c,b,aの順に1ノットに対応する周波数分減少させた周波数を中心周波数として設定する。
【0080】
このようにマルチフィルタ化し、所定の周波数分ずらした周波数を設定することにより、追尾する航空機の速度が変動した場合においても常に最良の受信レベルを得ることが可能となる。このようにしても、前述した実施形態と同等の作用効果を備えた精測進入レーダを得ることができる。
【0081】
上述した実施形態については、その新規な技術的内容の要点をまとめると、以下の付記のようになる。
尚、上記実施形態の一部又は全部は、新規な技術として以下のようにまとめられるが、本発明は必ずしもこれに限定されるものではない。
【0082】
(付記1)着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにおいて、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御手段を設け、
前記目標物検出手段は、
前記反射波以外の電波を雑音として遮断する目標物検出フィルタと、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御部とを備えたことを特徴とする精測進入レーダ。
【0083】
(付記2)付記1に記載の精測進入レーダにおいて、
前記目標物検出手段は、前記目標物検出フィルタを複数備えると共に、
前記各目標物検出フィルタは、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記各目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように、前記フィルタ係数制御部が算出した前記各目標物検出フィルタのフィルタ係数を可変設定する機能を備え、
前記目標物検出手段は前記各目標物検出フィルタで抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記航空機の進入機情報算出用に選択する信号選択部を備えたこと特徴とする精測進入レーダ。
【0084】
(付記3)付記1に記載の精測進入レーダにおいて、
前記電波送受信手段は、予め設定された時間間隔で前記電波を送信すると共に前記追尾制御手段からの制御信号によって前記電波の送信方向を前記航空機の機首領域に向けて設定する機能を有することを特徴とする精測進入レーダ。
【0085】
(付記4)付記3に記載の精測進入レーダにおいて、
前記追尾制御手段は、前記目標物検出手段で算出した前記航空機の位置情報および速度情報に基づいて次の送信タイミングにおける前記航空機の位置を算出する予測位置算出部と、
前記予測位置算出部の算出した前記航空機の機首領域に向けて前記電波を送信するように前記電波送受信手段を制御するビーム方向制御部とを備えたことを特徴とする精測進入レーダ。
【0086】
(付記5)付記1に記載の精測進入レーダにおいて、
前記表示手段は、前記画面上に表示した進入機情報から追尾対象の航空機をオペレータが選択した場合に、当該選択した航空機を特定する追尾対象選択機能を有すると共に、
前記追尾制御手段は、
前記追尾対象選択機能で選択された進入機情報を記憶手段に記憶する追尾対象記憶機能と、
前記目標物検出手段の検出した進入機情報と前記記憶手段に記憶した進入機情報との相関をとり、前記検出した進入機情報の航空機は追尾対象機であるか否か判定する追尾対象判定機能と、
前記検出した進入機が追尾対象機であると判定された場合に前記表示手段に前記目標物検出手段で検出した航空機は追尾対象機であることを表示する表示機能とを備えたことを特徴とする精測進入レーダ。
【0087】
(付記6)付記1に記載の精測進入レーダにおいて、
前記他のレーダを、前記精測進入レーダと併せて設置され空港周辺の空域を監視する空港監視レーダ、または航空機の飛行する航空路を監視する二次監視レーダとしたことを特徴とする精測進入レーダ。
【0088】
(付記7)着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を追尾制御手段が算出し、
前記追尾制御手段の算出したドップラ周波数の予測値を目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数をフィルタ係数制御部が可変設定し、
前記中心周波数に基づいて前記反射波以外の電波を雑音として目標物検出フィルタが遮断するようにしたことを特徴とする精測進入レーダ制御方法。
【0089】
(付記8)付記7に記載の精測進入レーダ制御方法において、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に複数の前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように前記フィルタ係数制御部が前記各目標物検出フィルタのフィルタ係数を可変設定し、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に信号選択部が選択するようにしたこと特徴とする精測進入レーダ制御方法。
【0090】
(付記9)着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御機能、
前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御機能、
前記中心周波数に基づいて前記反射波以外の電波を雑音として遮断する目標物検出フィルタ機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【0091】
(付記10)付記9に記載の精測進入レーダ制御用プログラムにおいて、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるよう前記各目標物検出フィルタのフィルタ係数を可変設定する機能、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に選択する信号選択機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【産業上の利用可能性】
【0092】
本発明は、状況に応じてフィルタの周波数特性を可変設定することができるため、航空管制用のレーダ装置に応用することが可能ある。
【符号の説明】
【0093】
3 電波送受信手段
10 目標物検出手段
11、11x 目標物検出フィルタ(x=a,b,c…)
14 フィルタ係数制御部
15 ビデオ選択部
20 追尾制御手段
23 予測位置算出部
24 ビーム方向制御部
30 レーダ表示手段
40 空港監視レーダ(ASR)
50 二次監視レーダ(SSR)
【技術分野】
【0001】
本発明は、精測進入レーダに関し、追尾する航空機ごとドップラフィルタのフィルタ特性を可変設定する精測進入レーダに関する。
【背景技術】
【0002】
精測進入レーダ(PAR:Precision Approach Radar)は、航空機の着陸誘導に際して誘導対象機の位置および速度を精密測定する場合に使用され、通常は空港監視レーダ(ASR:Airport Surveillance Radar)および二次監視レーダ(SSR:Secondary Surveillance Radar)と併せて運用されている。
【0003】
航空機は空港へ着陸する際に、最終進入コースに入るまでは前述したASRおよびSSRによる誘導を受けており、空港から約10海里(NM:Nautical Mile)でPARに管制権が引き継がれる。
【0004】
PARでは、通常、航空機以外の雑音であるクラッタと目標である航空機からの反射信号との分離のために、複数のフィルタを設置し各フィルタで雑音を除去するマルチドップラフィルタ方式が使用され、個々のフィルタの周波数特性は固定値で設計されている。
【0005】
しかし、着陸誘導する対象航空機は機種や状況に応じて着陸における進入速度が異なるため、マルチドップラフィルタの周波数特性が個々の状況に応じて最適化された値となっていない場合が多く、目標の検出が困難になるという問題があった。
【0006】
これに対して、従来より具体的に知られている上記技術分野の内容としては、特許文献1乃至4がある。
【0007】
特許文献1に開示された技術は、PARと併せて運用されるASRおよびSSRのそれぞれから目標機の位置情報および速度情報を取得し、この取得した位置情報および速度情報に基づいてPARから出力される電波の照射方向を目標機の方向に設定する技術である。
【0008】
また、特許文献2に開示された技術は、PARから出力される送信ビーム数を状況に応じて増加させることによって、PARの目標機検出能力の向上および目標機が複数存在する場合の同時追尾を可能とする技術である。
【0009】
さらに、特許文献3に開示された技術は、予め設定された時間間隔で電波が出力されるPARで、現スキャンにおける目標機のドップラ周波数に基づいて次スキャン時に目標機がとり得る速度を予測し、電波の反射波から予測した速度の範囲の周波数帯を受信処理することで処理負荷を低減する技術である。
【0010】
さらに、特許文献4に開示された技術は、飛行中の航空機から地表に向けてレーダ照射を行い、この反射波から自機の高度を算出し、算出した高度情報と地点ごとの標高情報を保有するデジタル標高地図(DEM:Digital Elevation Model)との同期をとることによって自機の位置を特定する技術に関して、位置の特定に際して処理にかかる負荷を低減させる技術であるが、本発明とは目的が異なる。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】平3−242579
【特許文献2】特開2010−156547
【特許文献3】特開2000−346932
【特許文献4】特表2005−525557
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1乃至3に開示された技術は、目標機以外の反射による雑音を除去するフィルタの周波数特性が固定値であるため、機種ごとに異なる進入速度や気象条件など個々の状況に応じて最適な値となっていないという不都合があった。
【0013】
〔発明の目的〕
本発明は、上記関連技術の有する不都合を改善し、目標機の検出および位置測定を安定して実施することが可能な精測進入レーダを提供することをその目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するため、本発明の精測進入レーダは、着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにおいて、前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御手段を設け、前記目標物検出手段は、前記反射波以外の電波を雑音として遮断する目標物検出フィルタと、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御部とを備えたことを特徴とする。
【0015】
また、本発明に係る精測進入レーダ制御方法は、着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を追尾制御手段が算出し、前記追尾制御手段の算出したドップラ周波数の予測値を目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数をフィルタ係数制御部が可変設定し、前記中心周波数に基づいて前記反射波以外の電波を雑音として目標物検出フィルタが遮断するようにしたことを特徴とする。
【0016】
更に、本発明に係る精測進入レーダ制御用プログラムは、着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御機能、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御機能、前記中心周波数に基づいて前記反射波以外の電波を雑音として遮断する目標物検出フィルタ機能、を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする。
【発明の効果】
【0017】
本発明は上述したように構成したので、これによると、予め別に設置された他のレーダから航空機の位置情報および速度情報を取得し、取得した位置情報に基づいて電波の送信方向を予め算出すると共に取得した速度情報に基づいてドップラ周波数の予測値を算出し、算出したドップラ周波数の予測値が中心周波数となるようなフィルタ係数をフィルタ係数制御部が算出して目標物検出フィルタに可変設定することによって、精測進入レーダにおけるクラッタの除去および受信信号レベルを最適化し、誘導対象機の検出及び位置測定を安定して実施し、着陸誘導管制を行うオペレータの負担を軽減することのできる優れた精測進入レーダ、精測進入レーダ制御方法および精測進入レーダ制御用プログラムを提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る精測進入レーダの一実施形態を示すブロック図である。
【図2】図1に開示したブロック図の全体の動作を示したフローチャートである。
【図3】図1に開示したブロック図における目標物検出フィルタ11のフィルタ特性をこれまでのマルチドップラフィルタと比較した説明図であり、(A)入力信号である受信ビデオBのスペクトラムの示した図、(B)これまでのマルチドップラフィルタのフィルタ特性を示した図、(C)目標抽出フィルタ11のフィルタ特性を示した図である。
【図4】本発明に係る精測進入レーダのその他の実施形態の一例を示すブロック図である。
【発明を実施するための形態】
【0019】
〔第1実施形態〕
以下、本発明に係る精測進入レーダの一実施形態を、図1乃至図3に基づいて説明する。
【0020】
まず最初に、本実施形態の精測進入レーダの基本的内容を図1および図2に基づいて説明する。
【0021】
図1に示すように、本実施形態の精測進入レーダ(PAR:Precision Approach Radar)は、電子走査式アンテナ1と、レーダ電波を送受信するレーダ送受信機2と、受信ビデオBから目標物の位置や速度などを検出して目標物検出データHとして出力する目標物検出手段10と、目標物の位置を追尾し、次走査時の目標物の位置を予測して、電子走査式アンテナ1にビーム方向制御信号Fを出力すると共に次走査時に予想される目標物のドップラ周波数からクラッタ抑圧および目標物抽出処理におけるドップラフィルタに対して最適値を設定する追尾制御手段20、目標物データの表示と最終着陸機を追尾目標物として選択する機能を有するレーダ表示手段30と、空港監視レーダ(ASR:Airport Surveillance Radar)40と、二次監視レーダ(SSR:Secondary Surveillance Radar)50から構成される。
【0022】
前述の追尾制御手段20は、ASR40およびSSR50から出力される追尾目標物データDおよびEを入力し、レーダ表示手段30において、PARで追尾を行う対象として指定された目標物の位置、速度、コースを算出し、さらに電子走査式アンテナ1のビーム指向方向を算出して、電子走査式アンテナ1へ出力してビーム放射方向の制御を行う。さらにPARに対する目標物の相対速度を算出し、ドップラ周波数を求め、フィルタ周波数制御データGとして目標物検出手段10へ出力する。
【0023】
また、前述した目標物検出手段10は、追尾制御手段20から指示された追尾目標物のドップラ周波数にクラッタ除去および目標物抽出処理におけるフィルタの中心周波数を設定して、このフィルタにより降雨によるクラッタを除去し、追尾目標物の信号を抽出し、目標物の検出を行う。
【0024】
これにより、追尾開始時から追尾目標物に対するクラッタ抑圧および目標抽出処理におけるフィルタ諸元を追尾目標物毎に最適値に設定することができるため、安定して目標物の追尾開始が可能となる。また、ASR40およびSSR50からの追尾目標データに基づいて追尾を開始した後は、PARで取得した追尾目標物データを使用して、ビーム放射方向の制御、および追尾毎にフィルタの値を決定して、追尾目標物の目標物検出を継続していく。
【0025】
このため、追尾目標物毎に最適なドップラフィルタを形成することにより、最大の受信信号レベルを得ることを可能とし、PARにおける目標物検出を安定して実施することが可能となる。
【0026】
次に、上記実施形態について、さらに詳細に説明する。
【0027】
まず、上述したように本実施形態の精測進入レーダは、着陸態勢の航空機に向けて電波を送信すると共にこの電波の反射波を受信する電波送受信手段3と、この電波送受信手段3で受信した反射波から航空機の位置情報および速度情報を算出する目標物検出手段10と、目標物検出手段10で算出した位置情報および速度情報に基づいて航空機の機首領域に向けて電波を送信するように電波送受信手段3を制御する追尾制御手段20と、目標物検出手段10で算出した位置情報および速度情報を進入機情報として画面上に管制用として表示するレーダ表示手段30とを備えている。
【0028】
前述した電波送受信手段3は、予め設定された時間間隔で高周波(RF:Radio Frequency)信号A(送信信号)を生成し電子走査式アンテナ1に出力すると共にこの電子走査式アンテナ1から伝送されるRF信号A(受信信号)を受信処理し受信ビデオBとして出力するレーダ送受信部2と、前述した追尾制御手段20から出力される電波の送信方向を制御信号する信号であるビーム方向制御信号Fに基づいて電波の送信方向を設定し、この方向に向けて上述したRF信号A(送信信号)を電波として出力すると共にこの電波の反射波を受信しRF信号A(受信信号)としてレーダ送受信部2に伝送する電子走査式アンテナ部1とを備えている。
【0029】
また、前述した目標物検出手段10は、レーダ送受信部2から出力された受信ビデオBに基づいて降雨や地表による反射など航空機以外の反射による雑音の周波数成分を除去する目標物検出フィルタ11と、この目標物検出フィルタ11によって雑音が除去された受信ビデオに基づいて、航空機以外の不要信号を誤って検出してしまう確率を一定に保ちつつ不要信号に埋もれた航空機の反射信号を検出する定誤警報(CFAR:Constant False Alarm Rate)処理を行う不要信号処理部12と、この不要信号処理部12によってCFAR処理された受信ビデオに基づいて航空機の反射信号を検出し、検出した反射信号に基づいて航空機の位置情報および速度情報を算出し目標物検出データIとして追尾制御手段20に出力する目標物検出処理部13とを備えている。
【0030】
これにより、航空機以外の雑音が含まれた反射信号から、目標物検出フィルタ11によって雑音となるクラッタ成分を除去し、CFAR処理部12によって定誤警報処理され、目標物検出処理部13によって航空機の速度情報および位置情報を算出し、算出した速度情報および位置情報を含んだ目標物検出データIを追尾制御手段20に出力することができる。
【0031】
さらに、目標物検出手段10は、追尾制御手段20の算出したフィルタ周波数制御データGからドップラ周波数を抽出し、このドップラ周波数を目標物検出フィルタ11が検出する電波の周波数帯の中心周波数となるようなフィルタ係数を算出し、この算出したフィルタ係数を目標物検出フィルタ11に可変設定するフィルタ係数制御部14を備えている。
【0032】
前述した目標物検出フィルタ11は、フィルタ係数制御部14から設定されるフィルタ係数によって、受信ビデオBから特定の周波数帯以外の信号を雑音として遮断する機能を有している。
【0033】
また、前述のフィルタ係数制御部14は、フィルタ係数と遮断周波数との対応関係を予め記憶したフィルタ係数記憶機能を図示しない形で有していると共に、このフィルタ係数記憶機能の記憶内容に基づいて中心周波数を通過させるようなフィルタ係数を算出するものとする。
【0034】
これによって、フィルタ係数制御部14は、追尾制御手段20の算出したドップラ周波数の予測値が中心周波数となるように目標物検出フィルタ11を制御することができ、個々の状況あわせて目標物検出フィルタ11のフィルタ特性を変更することができる。
【0035】
前述した目標物検出処理部13は、検出した反射信号に基づいて航空機のドップラ周波数を検出し、この検出したドップラ周波数から航空機の速度情報を算出する機能と、ドップラ周波数を検出した時間と前述した電子走査式アンテナ1から電波を送信した時間との差分により航空機の位置情報を算出する機能とを有している。
【0036】
前述の追尾制御手段20は、予め別に装備されたASR40から航空機の位置情報および速度情報を含んだ追尾目標物データDを取得する機能と、予め別に装備されたSSR50から航空機の位置情報および速度情報を含んだ追尾目標物データEを取得する機能とを有している追尾管理制御部21を備えている。
【0037】
さらに、前述の追尾監視制御部21は、ASR40から取得した追尾目標物データDおよびSSR50から取得した追尾目標物データEとに基づいて電子走査式アンテナ1における電波の送信方向を算出しビーム方向制御信号Fとして電子走査式アンテナに送信する機能と、目標物検出フィルタ11に入力される受信ビデオBに含まれる航空機のドップラ周波数の予測値を算出しフィルタ係数制御部14にフィルタ周波数制御データGとして送信する機能と、レーダ送受信部2から電波の生成タイミングを制御するシステムタイミング信号Cを取得する機能とを有している。
【0038】
これにより、追尾管理制御部21はASR40およびSSR50からの位置情報および速度情報に基づいてPARにおける航空機のドップラ周波数の予測値を算出することができ、フィルタ係数制御部14はこの算出したドップラ周波数の予測値に基づいて目標物検出フィルタ11のフィルタ係数を算出することができる。
【0039】
さらに、追尾制御手段20は、目標物検出手段10で算出した位置情報および速度情報とシステムタイミング信号Cとに基づいて次の電波送信タイミングにおける航空機の予測位置を算出する予測位置算出部23と、この予測位置算出部23の算出した位置の方向に電波を送信するように電子走査式アンテナ1に対してビーム方向制御信号Fを出力するビーム方向制御部24とを備えている。ここで、前述した予測位置算出部23は、航空機の機首領域を航空機の位置として算出するものとする
【0040】
これにより、予測位置算出部23は次の電波送信タイミングにおける航空機の予測位置を算出し、ビーム方向制御部24は予測位置算出部23の算出した航空機の機首領域に電子走査式アンテナ部1から出力される電波の送信方向を向けることができ、航空機の追尾を安定して実施することができる。
【0041】
また、前述のレーダ表示手段30は、目標物検出処理部13の算出した航空機の位置情報および速度情報を進入機情報として管制用にレーダ画面上に表示する機能と、このレーダ画面上に表示した進入機情報から着陸誘導を行う追尾対象機をオペレータが選択した場合にこの選択された対象機を特定し追尾目標物データIとして追尾制御手段20に送信する追尾対象特定機能とを有している。
【0042】
前述した追尾管理制御部21は、追尾対象特定機能によって特定した対象機の進入機情報を記憶する記憶機能を有している。また、追尾制御手段20は、前述した目標物検出手処理部13から取得した進入機情報と記憶機能に記憶された進入機情報との相関をとり目標物検出処理部13で検出した進入機は追尾対象機であるか否か判定する追尾対象判定機能と、この追尾対象判定機能で追尾対象機であると判定された場合に記憶機能に記憶された進入機情報を目標物検出処理部13で検出した進入機情報に更新する更新機能とを有する追尾処理部22を備えている。
【0043】
これにより、オペレータの選択した航空機の進入機情報を記憶機能が記憶し、目標物検出手段10で検出した航空機の進入機情報と記憶機能の進入機情報との相関をとり検出した航空機が追尾対象機であるか否か追尾対象判定機能が判定し、追尾対象機で会った場合には記憶機能の内容を検出した航空機の進入機情報の更新することで、オペレータから選択された対象機を追尾し続けることができる。
【0044】
〔第1実施形態の動作〕
次に、PARの全体的な動作の基本的内容を図2に基づいて説明する。
【0045】
まず、ASR40とSSR50からの追尾目標データは追尾管理制御部21に入力され(図2:ステップS101/ASR受信工程、図2ステップS102/SSR受信工程)、レーダ表示部30に、その情報が表示される(図2:ステップS103/進入機情報表示工程)。オペレータは、表示された情報によりPARで着陸誘導を行う目標を選択し、選択された対象機を特定する(図2:ステップS104/選択対象特定工程)。
【0046】
目標が選択されると、追尾管理制御部21において、ASR40とSSR50から入力された追尾目標物データから目標物の位置、速度、コースを求めて、PARに対する相対速度を算出し(図2:ステップS106/相対速度算出工程)、ドップラ周波数を計算し(図2:ステップS107/ドップラ周波数算出工程)、フィルタ係数制御器14に出力する。フィルタ係数制御器14は、入力されたドップラ周波数が中心周波数となるように目標抽出フィルタ11を制御する(図2:ステップS108/フィルタ制御工程)。
【0047】
ビーム方向制御部24は、追尾管理制御部21がASR40とSSR50から入力された追尾目標データから求めた目標の位置情報からPARの空中線ビーム方向を算出して、レーダ送受信機2からシステムタイミング信号Cに合わせて電子走査式アンテナ1へビーム方向制御信号Fを出力して、ビーム方向の制御を実施する(図2:ステップS109/ビーム出力方向制御工程)。
【0048】
レーダ送受信機2は、システムタイミング信号Cにあわせてレーダ信号を送信を行い(図2:ステップS110/送信波出力工程)、目標から反射された反射信号は、電子式走査アンテナ1で受信され、レーダ送受信機2によって受信処理されて受信ビデオとして目標物検出手段10に入力される(図2:ステップS111/受信処理工程)。
【0049】
目標物検出手段10では、前述のとおり追尾目標のドップラ周波数にセットされた目標抽出フィルタ11により、降雨などによるクラッタ成分が除去されて、目標の信号が抽出される。その後、CFAR処理部12において定誤警報受信処理を行った後、目標物検出処理部13により受信ビデオ信号Bから目標物検出を行う。
【0050】
目標物検出手段10から出力された目標物検出データHは、追尾制御手段20の追尾処理部22に入力される。追尾処理部22において、入力された目標物検出データHは、追尾管理制御部21に記憶された追尾対象目標を比較して相関が得られた場合、予測位置算出部23において、次のビーム放射タイミングでも目標物の位置、速度、コースを求めて、算出結果を追尾管理制御部21に出力する。
【0051】
追尾管理制御部21では、入力されたデータを記憶し、次のビーム放射におけるビーム方向制御のために、ビーム方向制御部24に出力する。
【0052】
これにより、ASR40とSSR50から入力した進入機情報に基づきPARで追尾を行う航空機のPARに対するドップラ周波数を算出して、算出した周波数をクラッタ抑圧および目標抽出処理におけるドップラフィルタに設定することによりクラッタの除去および受信信号レベルを最適化し、目標物検出および位置測定を安定に実施することを可能としている。
【0053】
次に、上記一実施形態の動作について、さらに詳細に説明する。
【0054】
まず、追尾管理制御部21は、上述したようにASR40から航空機の位置情報および速度情報を追尾目標データDとして取得する(図2:ステップS101/ASR受信工程)と共に、SSR50からも追尾目標データEを取得する(図2ステップS102/SSR受信工程)。
【0055】
続いて、追尾管理制御部21は、取得した航空機の飛行情報を進入機情報として表示するように追尾処理部22を介してレーダ表示手段30を制御し、レーダ表示手段30のレーダ画面上に航空機の飛行情報が表示される(図2:ステップS103/飛行情報表示工程)。
【0056】
オペレータはレーダ表示手段30に表示された進入機情報から着陸誘導を実施する対象機を選択すると、レーダ表示手段30はオペレータによって選択された対象機を特定し(図2:ステップS104/選択目標特定工程)、特定した対象機を追尾目標物データIとして追尾処理部22に送信し、尾処理部22は選択対象特定機能の受け付けた対象機の位置情報および速度情報を追尾管理制御部21の記憶機能に保存する。
【0057】
一方、追尾管理制御部21は、ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEからオペレータによって選択された対象機の進入機情報を抽出し、抽出した進入機情報に基づいて対象機の位置情報、速度情報およびコース情報を算出して電子走査式アンテナ部1に対する相対速度を算出する(図2:ステップS106/相対速度算出工程)。
【0058】
さらに、追尾管理制御部21は、算出した相対速度から対象機のドップラ周波数を算出し(図2:ステップS107/ドップラ周波数算出工程)、算出したドップラ周波数をフィルタ周波数制御データGとしてフィルタ係数制御器14に出力する。
【0059】
フィルタ係数制御器14は、フィルタ周波数制御データGに基づいてドップラ周波数が目標物検出フィルタ11の通過周波数帯の中心周波数となるようなフィルタ係数を算出し、算出したフィルタ係数を設定するように目標抽出フィルタ11を制御する(図2:ステップS108/フィルタ制御工程)。
【0060】
これによって、図3(c)に示すようなフィルタ特性が目標物検出フィルタ11に設定され、図3(b)で示すようなこれまでのフィルタ特定では除去することが困難であった図3(a)に示すような地表および海面からの反射であるグランドクラッタIや降雨などによる反射であるウェザクラッタJを除去し、目標信号Kのみを抽出することができる。
【0061】
さらに、追尾管理制御部21は、上記算出した相対速度の他に位置情報を算出し、電子走査式アンテナ1から出力される電波の送信方向が対象機の機首領域に向くような空中線ビーム方向を算出し、算出した空中線ビーム方向をビーム方向制御部24に出力する。
【0062】
ビーム方向制御部24は、予測位置算出部23の算出した空中線ビーム方向に基づいて電波送信方向を制御するビーム方向制御信号Fを、レーダ送受信部2から送信される電波の出力タイミングを制御するシステムタイミング信号Cに合わせて電子走査式アンテナ部1に対して送信し、ビーム方向の制御を実施する(図2:ステップS109/ビーム出力方向制御工程)。
【0063】
これによって、オペレータの選択した着陸誘導対象機の飛行する方向に向けて、電子走査式アンテナ1は、電波が照射することができる。
【0064】
前述のレーダ送受信機2は、生成した送信RF信号を、システムタイミング信号Cにあわせて電子走査式アンテナ部1に送信し、電子走査式アンテナ部1はレーダ送受信部2から送信された送信RF信号を電波として空中線部から出力する(図2:ステップS110/送信波出力工程)。
【0065】
前述の電波は、対象機、地表、海面および雨によって反射され、反射波として電子走査式アンテナ部1で受信され、受信された反射波は受信RF信号としてレーダ送受信部2に伝送される。レーダ送受信部2は、電子走査式アンテナ部1から伝送された受信RF信号を受信処理し、受信ビデオ信号Bに変換して目標物検出手段10に入力される(図2:ステップS111/受信処理工程)。
【0066】
目標物検出手段10に入力された受信ビデオBは、前述のとおり透過する中心周波数が対象機のドップラ周波数にセットされた目標抽出フィルタ11により、降雨などによるクラッタ成分が除去されて対象機の信号が抽出される。
【0067】
目標物検出フィルタ11によってクラッタ成分が除去された受信ビデオBは、CFAR処理部12において定誤警報受信処理を行った後、目標物検出処理部13により航空機による反射信号の検出を行う。目標物検出部13は、航空機の位置情報および速度情報が算出され目標物検出データHとして追尾制御手段20に対して出力する。
【0068】
前述の目標物検出フィルタ11のフィルタ特性は、オペレータによって対象機として選択された航空機のドップラ周波数に合わせたフィルタ特性となっているため、対象以外の雑音であるクラッタ成分が除去され、対象機を容易に検出することができる。
【0069】
追尾制御手段20の追尾処理部22は、追尾管理制御部21に記憶されたオペレータによって選択された着陸誘導対象機の情報を取得し、取得した情報と目標物検出手段10から出力された目標物検出データHとを比較する。
【0070】
前述の追尾処理部22は記憶機能に記憶された進入機情報と目標物検出データHの進入機情報とを比較した結果、相関関係が得られた場合、目標物検出データHは対象機であると判定し、予測位置算出部23は目標物検出データHに基づいて、次にシステムタイミング信号Cがレーダ送受信部2から出力される時間における対象機の位置情報、速度情報およびコース情報を算出し、算出結果を追尾管理制御部21に出力する。
【0071】
追尾管理制御部21は、予測位置算出部23の算出した対象機の予測情報を記憶機能に保存し、算出した位置の方向に電子走査式アンテナ部1が電波を照射するようにビーム方向制御部24を制御する。
【0072】
これによって、航空機からの反射信号の検出が容易となり、さらに追尾対象の検出も容易となるため、オペレータの選択した追尾対象機の追尾が安定して実施することができ、管制業務を行うオペレータの負担を軽減することができる。
【0073】
ここで、上述した一実施形態における動作にあって、上記工程で実行される各実行内容をプログラム化し、これをコンピュータに機能させるように構成してもよい。なお、この場合、本プログラムは、非一時的な記録媒体、例えば、DVD、CD、フラッシュメモリなどに記録されてもよい。その場合、本プログラムは、記録媒体からコンピュータによって読み出され、実行される。
【0074】
(第1実施形態の効果)
以上のように、本実施形態では、ASR40およびSSR50から入力された航空機の飛行情報に基づいて追尾管理制御部21が精測進入レーダにおけるドップラ周波数の予測値を算出し、算出したドップラ周波数の予測値を中心周波数としてフィルタ係数制御部14が目標物検出フィルタ11に対して設定することで、クラッタの除去および受信信号レベルを最適化し、目標物の検出および位置測定を安定して実施することができる。
【0075】
〔その他の実施形態〕
上述したように、一実施形態では、フィルタ係数制御部14が、追尾管理制御部21によって算出されたドップラ周波数の予測値が中心周波数となるようなフィルタ係数を目標物検出フィルタ11を設定する場合を例示した。これに対し、目標物検出フィルタを複数設置してマルチフィルタ化し中心周波数を所定の周波数分ずつずらすように設定し、受信信号レベルが最大の目標物検出フィルタを選択するようにしてもよい。
【0076】
図4に示すように、目標物検出フィルタ11と同等の機能を有する目標物検出フィルタ11a乃至11xを複数設置しマルチフィルタ化して、ビデオ信号選択部15により、各目標物検出フィルタからの信号レベルが最大のものを選択して目標物検出を行う。
【0077】
前述したマルチフィルタ11a乃至11xの各フィルタの周波数設定は次にように設定する。まず、前述の一実施形態と同様にASR40およびSSR50から入力した航空機の飛行情報から算出したドップラ周波数の予測値をマルチフィルタとして構成された目標抽出フィルタ11a乃至11xの中心に設定して対象機の速度変動に対応可能なように前後のフィルタに対しては、所定の周波数分ずらした周波数を設定する。
【0078】
例えば、目標物検出フィルタの数を11個(11a乃至11k)とし、追尾制御手段20の算出したドップラ周波数の予測値が中心周波数となるように目標物検出フィルタ11fに設定する。目標物検出フィルタ11gは、目標物検出フィルタ11fに設定した中心周波数から1ノットに対応する周波数分増加させた周波数を中心周波数として設定する。一方、目標物検出フィルタ11eは、目標物検出フィルタ11fに設定した中心周波数から1ノットに対応する周波数分減少させた周波数を中心周波数として設定する。
【0079】
同様に目標物検出フィルタ11fよりも添字がz寄りの目標物検出フィルタh乃至kには、1ノットに対応する周波数分増加させた周波数を中心周波数として設定し、目標物検出フィルタ11fよりも添字がa寄りの目標物検出フィルタa乃至dには、d,c,b,aの順に1ノットに対応する周波数分減少させた周波数を中心周波数として設定する。
【0080】
このようにマルチフィルタ化し、所定の周波数分ずらした周波数を設定することにより、追尾する航空機の速度が変動した場合においても常に最良の受信レベルを得ることが可能となる。このようにしても、前述した実施形態と同等の作用効果を備えた精測進入レーダを得ることができる。
【0081】
上述した実施形態については、その新規な技術的内容の要点をまとめると、以下の付記のようになる。
尚、上記実施形態の一部又は全部は、新規な技術として以下のようにまとめられるが、本発明は必ずしもこれに限定されるものではない。
【0082】
(付記1)着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにおいて、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御手段を設け、
前記目標物検出手段は、
前記反射波以外の電波を雑音として遮断する目標物検出フィルタと、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御部とを備えたことを特徴とする精測進入レーダ。
【0083】
(付記2)付記1に記載の精測進入レーダにおいて、
前記目標物検出手段は、前記目標物検出フィルタを複数備えると共に、
前記各目標物検出フィルタは、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記各目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように、前記フィルタ係数制御部が算出した前記各目標物検出フィルタのフィルタ係数を可変設定する機能を備え、
前記目標物検出手段は前記各目標物検出フィルタで抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記航空機の進入機情報算出用に選択する信号選択部を備えたこと特徴とする精測進入レーダ。
【0084】
(付記3)付記1に記載の精測進入レーダにおいて、
前記電波送受信手段は、予め設定された時間間隔で前記電波を送信すると共に前記追尾制御手段からの制御信号によって前記電波の送信方向を前記航空機の機首領域に向けて設定する機能を有することを特徴とする精測進入レーダ。
【0085】
(付記4)付記3に記載の精測進入レーダにおいて、
前記追尾制御手段は、前記目標物検出手段で算出した前記航空機の位置情報および速度情報に基づいて次の送信タイミングにおける前記航空機の位置を算出する予測位置算出部と、
前記予測位置算出部の算出した前記航空機の機首領域に向けて前記電波を送信するように前記電波送受信手段を制御するビーム方向制御部とを備えたことを特徴とする精測進入レーダ。
【0086】
(付記5)付記1に記載の精測進入レーダにおいて、
前記表示手段は、前記画面上に表示した進入機情報から追尾対象の航空機をオペレータが選択した場合に、当該選択した航空機を特定する追尾対象選択機能を有すると共に、
前記追尾制御手段は、
前記追尾対象選択機能で選択された進入機情報を記憶手段に記憶する追尾対象記憶機能と、
前記目標物検出手段の検出した進入機情報と前記記憶手段に記憶した進入機情報との相関をとり、前記検出した進入機情報の航空機は追尾対象機であるか否か判定する追尾対象判定機能と、
前記検出した進入機が追尾対象機であると判定された場合に前記表示手段に前記目標物検出手段で検出した航空機は追尾対象機であることを表示する表示機能とを備えたことを特徴とする精測進入レーダ。
【0087】
(付記6)付記1に記載の精測進入レーダにおいて、
前記他のレーダを、前記精測進入レーダと併せて設置され空港周辺の空域を監視する空港監視レーダ、または航空機の飛行する航空路を監視する二次監視レーダとしたことを特徴とする精測進入レーダ。
【0088】
(付記7)着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を追尾制御手段が算出し、
前記追尾制御手段の算出したドップラ周波数の予測値を目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数をフィルタ係数制御部が可変設定し、
前記中心周波数に基づいて前記反射波以外の電波を雑音として目標物検出フィルタが遮断するようにしたことを特徴とする精測進入レーダ制御方法。
【0089】
(付記8)付記7に記載の精測進入レーダ制御方法において、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に複数の前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように前記フィルタ係数制御部が前記各目標物検出フィルタのフィルタ係数を可変設定し、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に信号選択部が選択するようにしたこと特徴とする精測進入レーダ制御方法。
【0090】
(付記9)着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御機能、
前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御機能、
前記中心周波数に基づいて前記反射波以外の電波を雑音として遮断する目標物検出フィルタ機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【0091】
(付記10)付記9に記載の精測進入レーダ制御用プログラムにおいて、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるよう前記各目標物検出フィルタのフィルタ係数を可変設定する機能、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に選択する信号選択機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【産業上の利用可能性】
【0092】
本発明は、状況に応じてフィルタの周波数特性を可変設定することができるため、航空管制用のレーダ装置に応用することが可能ある。
【符号の説明】
【0093】
3 電波送受信手段
10 目標物検出手段
11、11x 目標物検出フィルタ(x=a,b,c…)
14 フィルタ係数制御部
15 ビデオ選択部
20 追尾制御手段
23 予測位置算出部
24 ビーム方向制御部
30 レーダ表示手段
40 空港監視レーダ(ASR)
50 二次監視レーダ(SSR)
【特許請求の範囲】
【請求項1】
着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにおいて、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御手段を設け、
前記目標物検出手段は、
前記反射波以外の電波を雑音として遮断する目標物検出フィルタと、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御部とを備えたことを特徴とする精測進入レーダ。
【請求項2】
請求項1に記載の精測進入レーダにおいて、
前記目標物検出手段は、前記目標物検出フィルタを複数備えると共に、
前記各目標物検出フィルタは、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記各目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように、前記フィルタ係数制御部が算出した前記各目標物検出フィルタのフィルタ係数を可変設定する機能を備え、
前記目標物検出手段は前記各目標物検出フィルタで抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記航空機の進入機情報算出用に選択する信号選択部を備えたこと特徴とする精測進入レーダ。
【請求項3】
請求項1に記載の精測進入レーダにおいて、
前記電波送受信手段は、予め設定された時間間隔で前記電波を送信すると共に前記追尾制御手段からの制御信号によって前記電波の送信方向を前記航空機の機首領域に向けて設定する機能を有することを特徴とする精測進入レーダ。
【請求項4】
請求項3に記載の精測進入レーダにおいて、
前記追尾制御手段は、前記目標物検出手段で算出した前記航空機の位置情報および速度情報に基づいて次の送信タイミングにおける前記航空機の位置を算出する予測位置算出部と、
前記予測位置算出部の算出した前記航空機の機首領域に向けて前記電波を送信するように前記電波送受信手段を制御するビーム方向制御部とを備えたことを特徴とする精測進入レーダ。
【請求項5】
請求項1に記載の精測進入レーダにおいて、
前記表示手段は、前記画面上に表示した進入機情報から追尾対象の航空機をオペレータが選択した場合に、当該選択した航空機を特定する追尾対象特定機能を有すると共に、
前記追尾制御手段は、
前記追尾対象特定機能で特定した進入機情報を記憶手段に記憶する追尾対象記憶機能と、
前記目標物検出手段の検出した進入機情報と前記記憶手段に記憶した進入機情報との相関をとり、前記検出した進入機情報の航空機は追尾対象機であるか否か判定する追尾対象判定機能と、
前記検出した進入機が追尾対象機であると判定された場合に前記表示手段に前記目標物検出手段で検出した航空機は追尾対象機であることを表示する表示機能とを備えたことを特徴とする精測進入レーダ。
【請求項6】
請求項1に記載の精測進入レーダにおいて、
前記他のレーダを、前記精測進入レーダと併せて設置され空港周辺の空域を監視する空港監視レーダ、または航空機の飛行する航空路を監視する二次監視レーダとしたことを特徴とする精測進入レーダ。
【請求項7】
着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を追尾制御手段が算出し、
前記追尾制御手段の算出したドップラ周波数の予測値を目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数をフィルタ係数制御部が可変設定し、
前記中心周波数に基づいて前記反射波以外の電波を雑音として目標物検出フィルタが遮断するようにしたことを特徴とする精測進入レーダ制御方法。
【請求項8】
請求項7に記載の精測進入レーダ制御方法において、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に複数の前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように前記フィルタ係数制御部が前記各目標物検出フィルタのフィルタ係数を可変設定し、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に信号選択部が選択するようにしたこと特徴とする精測進入レーダ制御方法。
【請求項9】
着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御機能、
前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御機能、
前記中心周波数に基づいて前記反射波以外の電波を雑音として遮断する目標物検出フィルタ機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【請求項10】
請求項9に記載の精測進入レーダ制御用プログラムにおいて、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるよう前記各目標物検出フィルタのフィルタ係数を可変設定する機能、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に選択する信号選択機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【請求項1】
着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにおいて、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御手段を設け、
前記目標物検出手段は、
前記反射波以外の電波を雑音として遮断する目標物検出フィルタと、前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御部とを備えたことを特徴とする精測進入レーダ。
【請求項2】
請求項1に記載の精測進入レーダにおいて、
前記目標物検出手段は、前記目標物検出フィルタを複数備えると共に、
前記各目標物検出フィルタは、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記各目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように、前記フィルタ係数制御部が算出した前記各目標物検出フィルタのフィルタ係数を可変設定する機能を備え、
前記目標物検出手段は前記各目標物検出フィルタで抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記航空機の進入機情報算出用に選択する信号選択部を備えたこと特徴とする精測進入レーダ。
【請求項3】
請求項1に記載の精測進入レーダにおいて、
前記電波送受信手段は、予め設定された時間間隔で前記電波を送信すると共に前記追尾制御手段からの制御信号によって前記電波の送信方向を前記航空機の機首領域に向けて設定する機能を有することを特徴とする精測進入レーダ。
【請求項4】
請求項3に記載の精測進入レーダにおいて、
前記追尾制御手段は、前記目標物検出手段で算出した前記航空機の位置情報および速度情報に基づいて次の送信タイミングにおける前記航空機の位置を算出する予測位置算出部と、
前記予測位置算出部の算出した前記航空機の機首領域に向けて前記電波を送信するように前記電波送受信手段を制御するビーム方向制御部とを備えたことを特徴とする精測進入レーダ。
【請求項5】
請求項1に記載の精測進入レーダにおいて、
前記表示手段は、前記画面上に表示した進入機情報から追尾対象の航空機をオペレータが選択した場合に、当該選択した航空機を特定する追尾対象特定機能を有すると共に、
前記追尾制御手段は、
前記追尾対象特定機能で特定した進入機情報を記憶手段に記憶する追尾対象記憶機能と、
前記目標物検出手段の検出した進入機情報と前記記憶手段に記憶した進入機情報との相関をとり、前記検出した進入機情報の航空機は追尾対象機であるか否か判定する追尾対象判定機能と、
前記検出した進入機が追尾対象機であると判定された場合に前記表示手段に前記目標物検出手段で検出した航空機は追尾対象機であることを表示する表示機能とを備えたことを特徴とする精測進入レーダ。
【請求項6】
請求項1に記載の精測進入レーダにおいて、
前記他のレーダを、前記精測進入レーダと併せて設置され空港周辺の空域を監視する空港監視レーダ、または航空機の飛行する航空路を監視する二次監視レーダとしたことを特徴とする精測進入レーダ。
【請求項7】
着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を追尾制御手段が算出し、
前記追尾制御手段の算出したドップラ周波数の予測値を目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数をフィルタ係数制御部が可変設定し、
前記中心周波数に基づいて前記反射波以外の電波を雑音として目標物検出フィルタが遮断するようにしたことを特徴とする精測進入レーダ制御方法。
【請求項8】
請求項7に記載の精測進入レーダ制御方法において、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に複数の前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるように前記フィルタ係数制御部が前記各目標物検出フィルタのフィルタ係数を可変設定し、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に信号選択部が選択するようにしたこと特徴とする精測進入レーダ制御方法。
【請求項9】
着陸態勢の航空機に向けて予め設定された周波数の電波を送信すると共に当該電波の反射波を受信する電波送受信手段と、前記反射波から前記航空機のドップラ周波数を検出し当該ドップラ周波数の反射検出時間に基づいて前記航空機の位置情報を算出すると共に当該ドップラ周波数に基づいて前記航空機の速度情報を算出する目標物検出手段と、前記目標物検出手段の算出した位置情報及び速度情報を進入機情報として画面上に管制用として表示する表示手段とを備えた精測進入レーダにあって、
前記航空機の位置情報および速度情報を予め別に設置された他のレーダから取得し当該位置情報に基づいて前記電波送受信手段の電波の送信方向を予め算出すると共に前記他のレーダから取得した速度情報に基づいて前記目標物検出手段で検出するドップラ周波数の予測値を算出する追尾制御機能、
前記追尾制御手段の算出したドップラ周波数の予測値を前記目標物検出フィルタを通過する電波の周波数帯の中心周波数となるように前記目標物検出フィルタのフィルタ係数を可変設定するフィルタ係数制御機能、
前記中心周波数に基づいて前記反射波以外の電波を雑音として遮断する目標物検出フィルタ機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【請求項10】
請求項9に記載の精測進入レーダ制御用プログラムにおいて、
前記追尾制御手段の算出したドップラ周波数の予測値に基づいて、前記航空機の速度変動によるドップラ周波数のずれに対応可能に前記目標物検出フィルタの中心周波数をそれぞれ異なった周波数となるよう前記各目標物検出フィルタのフィルタ係数を可変設定する機能、
前記各目標物検出フィルタによって抽出されたドップラ周波数の内、受信レベルが最大のドップラ周波数を前記進入機情報算出用に選択する信号選択機能、
を実行可能にプログラム化し、これを前記精測進入レーダが予め備えているコンピュータに実現させるようにしたことを特徴とする精測進入レーダ制御用プログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−168060(P2012−168060A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−30230(P2011−30230)
【出願日】平成23年2月15日(2011.2.15)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月15日(2011.2.15)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]