
糸巻取機
【課題】紡績糸を巻き取ることによって作成されたパッケージの糸端を容易に捕捉できる技術を提供する。
【解決手段】ボビンTBを回転自在に保持するボビン保持部71と、前記ボビンTBに巻き取られる紡績糸Yの連続又は不連続を検出できる糸情報検出部5と、前記ボビンTB及び該ボビンTB上に作成されたパッケージPを回転させるパッケージ駆動部73と、前記糸情報検出部5からの検出信号に基づいて前記パッケージ駆動部73を制御する制御部10と、を備える糸巻取機100であって、前記制御部10は、前記糸情報検出部5が前記紡績糸Yの不連続を検出した場合、紡績糸Yの糸端YEが所定の位置で止まるように前記ボビンTBの回転を停止させるように前記パッケージ駆動部73を制御する、とした。
【解決手段】ボビンTBを回転自在に保持するボビン保持部71と、前記ボビンTBに巻き取られる紡績糸Yの連続又は不連続を検出できる糸情報検出部5と、前記ボビンTB及び該ボビンTB上に作成されたパッケージPを回転させるパッケージ駆動部73と、前記糸情報検出部5からの検出信号に基づいて前記パッケージ駆動部73を制御する制御部10と、を備える糸巻取機100であって、前記制御部10は、前記糸情報検出部5が前記紡績糸Yの不連続を検出した場合、紡績糸Yの糸端YEが所定の位置で止まるように前記ボビンTBの回転を停止させるように前記パッケージ駆動部73を制御する、とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紡績糸を巻き取ることによってパッケージを作成する糸巻取機の技術に関する。
【背景技術】
【0002】
従来より、ボビンを回転させることによって紡績糸を巻き取り、該ボビン上にパッケージを作成する糸巻取機が知られている(例えば特許文献1参照)。糸巻取機には、パッケージの糸端を捕捉する捕捉部と、糸端どうしを継ぎ合わせる糸継部と、が備えられている。
【0003】
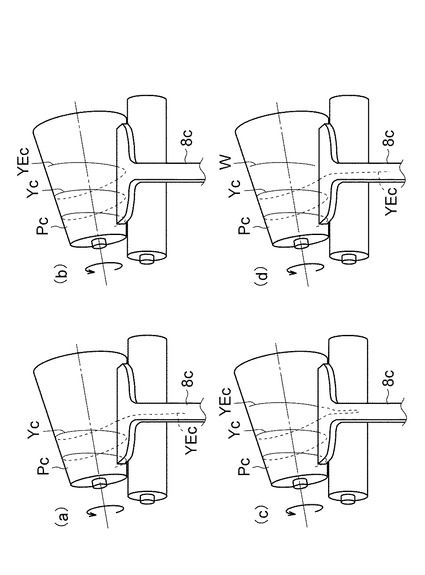
図8(a)に示すように、捕捉部8cは、空気を吸入することによって糸端YEcを捕捉する。その後、捕捉部8cは、糸端YEcを吸入保持した状態で回動し、紡績糸YcをパッケージPcから引き出す。糸継部は、パッケージPcから引き出された紡績糸Ycの糸端YEcと給糸ボビン側の糸端を継ぎ合わせる(図示せず)。このように、糸巻取機は、パッケージPc側の糸端YEcと給糸ボビン側の糸端を継ぎ合わせることによって、パッケージPcの作成を再開できる。従って、糸巻取機の稼動率は、捕捉部8cによる糸端YEcの捕捉が成功するか否かによって影響を受けることとなる。
【0004】
具体的に説明すると、図8(b)に示すように、捕捉部8cが糸端YEcを捕捉できない場合は、糸継ができないことから稼動停止するしかなく、糸巻取機の稼動率が低下する。また、図8(c)に示すように、捕捉部8cが紡績糸Ycの中途部を吸入した場合も、糸継ができないことから稼動停止するしかなく、糸巻取機の稼動率が低下する。更に、図8(d)に示すように、捕捉部8cが紡績糸Ycの中途部を吸入したことによって該紡績糸Ycが切れた場合は、パッケージPcに屑糸Wが混入する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−144029号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、かかる問題を解決すべくなされたものであり、紡績糸を巻き取ることによって作成されたパッケージの糸端を容易に捕捉できる技術を提供することを目的としている。
【課題を解決するための手段】
【0007】
第1の発明は、紡績糸を巻き取ることによってパッケージを作成する糸巻取機に関する。本発明の実施形態に係る糸巻取機は、ボビン保持部と、糸情報検出部と、パッケージ駆動部と、制御部と、を備える。ボビン保持部は、ボビンを回転自在に保持する。糸情報検出部は、ボビンに巻き取られる紡績糸の連続又は不連続を検出できる。パッケージ駆動部は、ボビン及び該ボビン上に作成されたパッケージを回転させる。制御部は、糸情報検出部からの検出信号に基づいてパッケージ駆動部を制御できる。制御部は、糸情報検出部が紡績糸の不連続を検出した場合、パッケージの糸端が所定の位置で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0008】
第2の発明は、第1の発明に係る糸巻取機に関する。本発明の実施形態に係る糸巻取機は、捕捉部を具備する。捕捉部は、紡績糸の糸端を捕捉する。制御部は、パッケージの糸端が捕捉部の近傍で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0009】
第3の発明は、第2の発明に係る糸巻取機に関する。捕捉部は、空気を吸入することによってパッケージの糸端を捕捉する。
【0010】
第4の発明は、第3の発明に係る糸巻取機に関する。パッケージの回転軸と捕捉部の吸入口とを結ぶ仮想線を基準として、該パッケージの回転軸を中心に仮想線から所定の角度となる捕捉範囲が定められる。制御部は、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0011】
第5の発明は、第4の発明に係る糸巻取機に関する。捕捉範囲は、仮想線からパッケージの回転方向及び反回転方向に略90度の範囲とする。
【0012】
第6の発明は、第4の発明に係る糸巻取機に関する。捕捉範囲は、仮想線からパッケージの回転方向及び反回転方向に略45度の範囲とする。
【0013】
第7の発明は、第4の発明に係る糸巻取機に関する。捕捉範囲は、パッケージの糸端が反重力方向に略沿うようにして止まる範囲とする。
【0014】
第8の発明は、第1から第7のいずれかの発明に係る糸巻取機に関する。本発明の実施形態に係る糸巻取機は、接触ローラを具備する。接触ローラは、パッケージと接触した状態で回転する。また、糸情報検出部が前記紡績糸の不連続を検出した場合にパッケージを回転させると接触ローラによって押圧される押圧範囲が定められる。制御部は、パッケージの糸端が押圧範囲外で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0015】
第9の発明は、第1から第8のいずれかの発明に係る糸巻取機に関する。本発明の実施形態に係る糸巻取機は、回転速度検出部と、巻取量検出部と、を具備する。回転速度検出部は、パッケージの回転速度を検出する。巻取量検出部は、パッケージの巻取量を検出する。制御部は、パッケージの回転速度と巻取量に基づいてパッケージ駆動部を制御する。
【0016】
第10の発明は、第1から第9のいずれかの発明に係る糸巻取機に関する。パッケージ駆動部は、サーボモータを用いて構成される。
【発明の効果】
【0017】
本発明の効果として、以下に示すような効果を奏する。
【0018】
第1の発明によれば、パッケージの糸端が所定の位置で止まるように該パッケージの回転を停止できる。これにより、パッケージの糸端を容易に捕捉することが可能となる。
【0019】
第2の発明によれば、パッケージの糸端が捕捉部の近傍で止まるように該パッケージの回転を停止できる。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0020】
第3の発明によれば、パッケージの糸端が捕捉部の近傍で止まるように該パッケージの回転を停止できているため、捕捉部は、空気の吸入によって糸端を捕捉する場合であっても、紡績糸の中途部を吸入することを回避して糸端を捕捉することができる。
【0021】
第4の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。捕捉範囲とは、パッケージの糸端を捕捉できる可能性が高くなる範囲である。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0022】
第5の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。仮想線からパッケージの回転方向及び反回転方向に略90度となる捕捉範囲は、捕捉部がパッケージの糸端を捕捉できる可能性が更に高くなる範囲である。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0023】
第6の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。仮想線からパッケージの回転方向及び反回転方向に略45度となる捕捉範囲は、捕捉部がパッケージの糸端を捕捉できる可能性が最も高くなる範囲である。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0024】
第7の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。パッケージの糸端が反重力方向に略沿うようにして止まる捕捉範囲は、パッケージの糸端が該パッケージの表面から浮き上がる範囲である。従って、パッケージの糸端が捕捉範囲内で止まると、捕捉部がパッケージの糸端を捕捉できる可能性が高くなる。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0025】
第8の発明によれば、パッケージの糸端が押圧範囲外で止まるように該パッケージの回転を停止できる。押圧範囲とは、パッケージの糸端を捕捉する際に該パッケージを回転させると接触ローラによって押圧される範囲である。従って、パッケージの糸端が押圧範囲外で止まると、捕捉部がパッケージの糸端を捕捉できる可能性が高くなる。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0026】
第9の発明によれば、パッケージの回転量と巻取量に基づいてパッケージ駆動部を制御できる。これにより、パッケージの糸端を正確に任意位置で止めることができる。
【0027】
第10の発明によれば、サーボモータを用いることでフィードバック制御を実現できる。これにより、パッケージの糸端を正確に任意位置で止めることができる。
【図面の簡単な説明】
【0028】
【図1】糸巻取機100の全体構成を示す概略図。
【図2】糸端YEの捕捉動作を示す側面図。
【図3】糸端YEの引出動作を示す側面図。
【図4】糸端YEの停止位置を示す図。
【図5】糸端YEの停止位置を示す図。
【図6】糸端YEの停止位置を示す図。
【図7】糸端YEの停止位置を示す図。
【図8】従来の糸巻取機における糸端YEの捕捉時の状態を示す図。
【発明を実施するための形態】
【0029】
まず、本発明の一実施形態に係る糸巻取機100について説明する。
【0030】
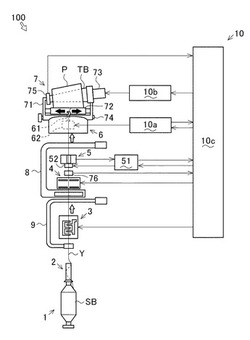
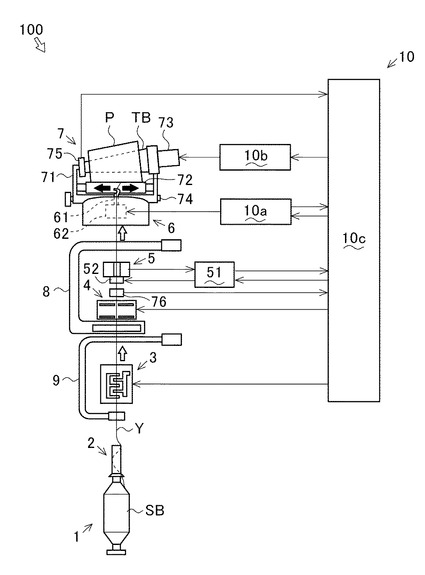
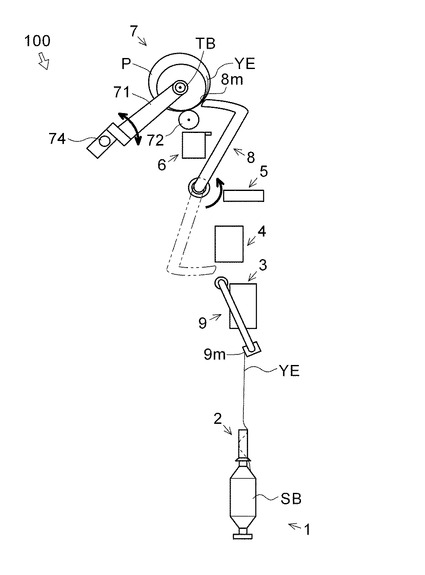
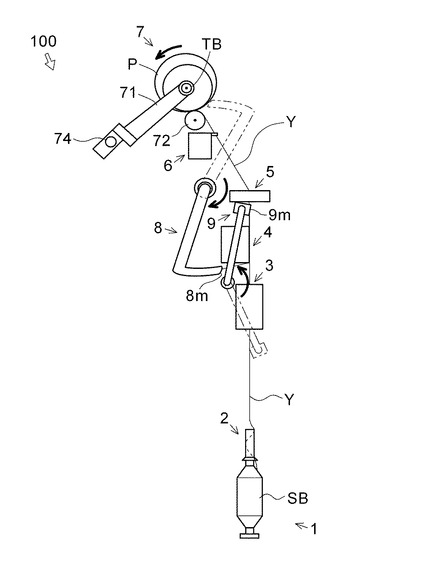
図1は、糸巻取機100の全体構成を示す概略図である。図中の白矢印は、紡績糸Yの送り方向を示している。また、図2は、糸端YEの捕捉動作を示す側面図である。図3は、糸端YEの引出動作を示す側面図である。
【0031】
糸巻取機100には、給糸部1が備えられている。給糸部1には、紡績糸Yが巻かれた給糸ボビンSBが装着される。糸巻取機100には、給糸ボビンSBから解舒された紡績糸Yの送り方向に沿って、糸解舒補助部2、張力付与部3、糸継部4、糸情報検出部5、綾振部6、巻取部7が備えられている。更に、糸巻取機100には、捕捉部8、案内部9及び制御部10が備えられている。
【0032】
糸解舒補助部2は、給糸ボビンSBに巻かれた紡績糸Yの解舒を補助する。糸解舒補助部2は、給糸ボビンSBから解舒された紡績糸Yが遠心力によって広がることを制限する。
【0033】
張力付与部3は、給糸ボビンSBから解舒された紡績糸Yに所定の張力を付与する。張力付与部3は、紡績糸Yに所定の張力を付与することによって、該紡績糸Yの高速巻き取りを可能としている。なお、張力付与部3として、櫛歯によって紡績糸Yに張力を付与するゲート式テンサーの他、ディスク式テンサー等を用いることが可能である。
【0034】
糸継部4は、紡績糸Yの糸端YEどうしを継ぎ合わせる。糸継部4は、例えば紡績糸Yが切れた場合に、分断された紡績糸Yの糸端YEどうしを継ぎ合わせる。なお、糸継部4として、旋回気流によって紡績糸Yの糸端YEどうしを継ぎ合わせるエアスプライサ装置の他、機械式スプライサ装置等を用いることが可能である。
【0035】
糸情報検出部5は、紡績糸Yの欠点部を検出する。また、糸情報検出部5は、紡績糸Yの連続又は不連続を検出する。糸情報検出部5は、発光ダイオードを光源として紡績糸Yを照射し、該紡績糸Yからの反射光量を測定することによって、紡績糸Yの欠点部の有無及び紡績糸Yの連続又は不連続を検出できる。具体的には、アナライザ51が糸情報検出部5からの検出信号を分析することによって、紡績糸Yの欠点部の有無及び紡績糸Yの連続又は不連続が判断される。なお、糸情報検出部5の近傍には、紡績糸Yを切断できるカッタ52が付設されている。ユニット制御部10cは、カッタ52による紡績糸Yの切断信号によって紡績糸Yの不連続を把握することも可能である。
【0036】
ここで、紡績糸Yの欠点部とは、紡績糸Yの一部が太過ぎる(太糸)若しくは細過ぎる(細糸)異常の他、紡績糸Yに異物が介在している場合が含まれる。また、紡績糸Yの不連続とは、紡績糸Yがカッタ52によって切断された場合や異常な張力が掛かって切れた場合、給糸ボビンSBに巻かれていた紡績糸Yが全て解舒された場合を含む概念である。なお、糸情報検出部5として、上記のような光学式センサの他、静電容量式センサ等を用いることが可能である。
【0037】
綾振部6は、パッケージPに導かれる紡績糸Yを綾振する。綾振部6は、綾振ガイド61と綾振ガイド駆動部62を備える。綾振ガイド駆動部62は、綾振ガイド駆動制御部10aからの制御信号に基づいて綾振ガイド61を駆動する。綾振ガイド駆動制御部10aは、ユニット制御部10cからの指示に基づいて綾振ガイド駆動部62に制御信号を伝達する。なお、制御部10は、綾振ガイド駆動制御部10aやユニット制御部10cを含む概念である。
【0038】
綾振ガイド61は、紡績糸Yを引っ掛けるフック部が設けられたアーム部材である。綾振ガイド61は、フック部に紡績糸Yを引っ掛けた状態でボビンTBの回転軸方向に往復し(図1中黒矢印参照)、紡績糸Yを綾振する。
【0039】
綾振ガイド駆動部62は、主にサーボモータを用いて構成される。綾振ガイド駆動部62は、サーボモータの回転軸を正転又は逆転することによって、綾振ガイド61を往復させる。なお、綾振ガイド駆動部62は、動力源としてサーボモータを用いているが、例えばステッピングモータ等であっても良く、モータの種類は問わない。また、サーボモータの回転軸の方向、即ち、綾振ガイド61の取り付け方向についても限定しない。
【0040】
このように、綾振部6は、往復する綾振ガイド61によって紡績糸Yを綾振する、いわゆるアーム式トラバース装置を構成している。しかし、アーム式トラバース装置の他、ベルト式トラバース装置や羽根トラバース装置等を用いることが可能である。また、本糸巻取機100は、パッケージPに接触した状態で回転するドラムを設け、該ドラムの表面に形成された案内溝によって紡績糸Yを綾振する構成、即ち、綾振ドラム方式であっても良い。
【0041】
巻取部7は、ボビンTBを回転させて紡績糸Yを巻き取る。巻取部7は、ボビン保持部71と接触ローラ72とパッケージ駆動部73を備える。パッケージ駆動部73は、パッケージ駆動制御部10bからの制御信号に基づいてボビンTBを回転させる。パッケージ駆動制御部10bは、ユニット制御部10cからの指示に基づいてパッケージ駆動部73に制御信号を伝達する。なお、制御部10は、パッケージ駆動制御部10bやユニット制御部10cを含む概念である。
【0042】
ボビン保持部71は、ボビンTBを脱着自在に把持するベアリングを備え、該ボビンTBを回転自在に保持する。また、ボビン保持部71は、揺動軸74を中心に揺動可能に構成されている(図2中矢印参照)。従って、ボビン保持部71は、紡績糸Yが巻かれることによってパッケージPの外径が大きくなった場合でも、接触ローラ72がパッケージPの表面を一定の荷重で押すことを可能としている。
【0043】
接触ローラ72は、回転するパッケージPによって従動回転する。接触ローラ72は、パッケージPの表面を押圧することによって、該パッケージPの形状を整える。なお、接触ローラ72は、略円筒形状の回転体であるが、例えばコーン形状の回転体であっても良く、形状は問わない。
【0044】
パッケージ駆動部73は、主にサーボモータを用いて構成される。パッケージ駆動部73は、サーボモータを駆動することによって、ボビンTB及び該ボビンTB上に作成されたパッケージPを回転させる。なお、パッケージ駆動部73は、動力源としてサーボモータを用いているが、例えばステッピングモータ等であっても良く、モータの種類は問わない。なお、パッケージ駆動部73の動力源としてサーボモータを用いる利点については後述する。
【0045】
このように、巻取部7は、パッケージ駆動部73によってパッケージPが主動回転され、該パッケージPの回転に伴って接触ローラ72が従動回転するように構成されている。しかし、パッケージ駆動部73によって接触ローラ72が主動回転され、該接触ローラ72の回転に伴ってパッケージPが従動回転するように構成しても良い。
【0046】
捕捉部8は、紡績糸Yが不連続となった場合に、パッケージPに巻き取られた紡績糸Yの糸端(上糸)YEを捕捉する。また、捕捉部8は、糸端YEを吸入保持した状態で回動し、紡績糸YをパッケージPから引き出す。具体的に説明すると、捕捉部8は、糸継動作の開始に際して吸引口8mが待機位置からパッケージPの近傍へ移動するように回動し(図2中矢印参照)、吸入口8mから空気を吸入することによって糸端YEを捕捉する。そして、捕捉部8は、糸端YEを吸入保持した状態で吸引口8mがパッケージPの近傍から糸継部4の上流側へ移動するように回動し(図3中矢印参照)、紡績糸YをパッケージPから引き出す。このとき、パッケージ駆動部73は、ボビンTB及びパッケージPを逆転させる(図3中矢印参照)。なお、捕捉部8として、上記のようなサクションアーム方式の他、固定されたサクション管にスリットを設けて紡績糸Yを引き出す構成とすることも可能である。
【0047】
案内部9は、紡績糸Yが不連続となった場合に、給糸ボビンSBに巻かれた紡績糸Yの糸端(下糸)YEを捕捉する。また、案内部9は、糸端YEを吸入保持した状態で回動し、紡績糸Yを給糸ボビンSBから解舒する。具体的に説明すると、案内部9は、吸入口9mから空気を吸入することによって糸端YEを捕捉する。そして、案内部9は、糸端YEを吸入保持した状態で吸引口9mが給糸ボビンSBの近傍から糸継部4の下流側へ移動するように回動し(図3中矢印参照)、紡績糸Yを給糸ボビンSBから解舒する。
【0048】
その後、捕捉部8によって所定の位置に配置された紡績糸Yの糸端YEと案内部9によって所定の位置に配置された紡績糸Yの糸端YEは、糸継部4によって継ぎ合わされる。このように、糸巻取機100は、パッケージPに巻き取られた紡績糸Yの糸端YEと給糸ボビンSBに巻かれた紡績糸Yの糸端YEを継ぎ合わせることによって、パッケージPの作成を再開できる。従って、糸巻取機100の稼動率は、捕捉部8による糸端YEの捕捉が成功するか否かによって影響を受けることとなる。
【0049】
次に、捕捉部8による糸端YEの捕捉が成功するように構成された、本糸巻取機100の特徴点について説明する。
【0050】
本糸巻取機100の特徴点は、パッケージPの回転が完全に停止するまで該パッケージPの回転状態を制御できる点にある。従って、糸巻取機100は、パッケージPに巻き取られた紡績糸Yの糸端YEが所定の位置で止まるようにパッケージ駆動部73を制御できる。
【0051】
具体的に説明すると、糸巻取機100は、糸情報検出部5が紡績糸Yの不連続を検出した場合にパッケージPの回転を停止させる。従来の糸巻取機においては、パッケージ駆動部73のサーボモータ用電源を遮断することによって、パッケージPの回転を停止させる構成であった。しかし、本実施形態に係る糸巻取機100は、ドライバへ送信される指令パルスを適宜に調整することによって、パッケージPの回転状態を制御しながら該パッケージPの回転を停止できる。なお、パッケージ駆動部73に電磁ブレーキ等の制動装置を搭載してパッケージPの回転を停止させるとしても良い。
【0052】
更に、糸巻取機100は、パッケージPの回転を停止させた後に再びパッケージPを回転させることによって、糸端YEを任意位置で止めることも可能である。これは、制御部10がパッケージPの回転状態を自由に制御できるため、簡単な制御プログラムによって実現できる。パッケージPの回転を停止させた後に再びパッケージPを回転させることによって、糸端YEを任意位置で止める構成も、本発明の技術的範囲に含まれる。
【0053】
このような構成により、糸巻取機100は、パッケージPの糸端YEが所定の位置で止まるように該パッケージPの回転を停止できる。これにより、捕捉部8は、パッケージPの糸端YEを容易に捕捉することが可能となる。
【0054】
また、本実施形態に係る糸巻取機100において、「所定の位置」とは、捕捉部8の近傍を指す。より詳細に説明すると、「所定の位置」とは、糸端YEを捕捉する際の吸入口8mの近傍を意味する(図2参照)。
【0055】
このような構成により、糸巻取機100は、パッケージPの糸端YEが捕捉部8の近傍で止まるように該パッケージPの回転を停止できる。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0056】
なお、捕捉部8は、空気を吸入することによって糸端YEを捕捉する構造である。このため、従来の糸巻取機においては、捕捉部8が紡績糸Yの中途部を吸入する可能性があった(図8(c)、図8(d)参照)。しかし、本糸巻取機100は、パッケージPの糸端YEが捕捉部8の近傍で止まるように該パッケージPの回転を停止できるため、捕捉部8が紡績糸Yの中途部を吸入することを防止できる。
【0057】
次に、「捕捉部8の近傍」について更に具体的に特定する。「捕捉部8の近傍」とは、捕捉部8によって糸端YEを捕捉できる可能性が高くなる範囲を意味する。ここでは、捕捉部8によって糸端YEを捕捉できる可能性が高くなる範囲を捕捉範囲Aaとする。
【0058】
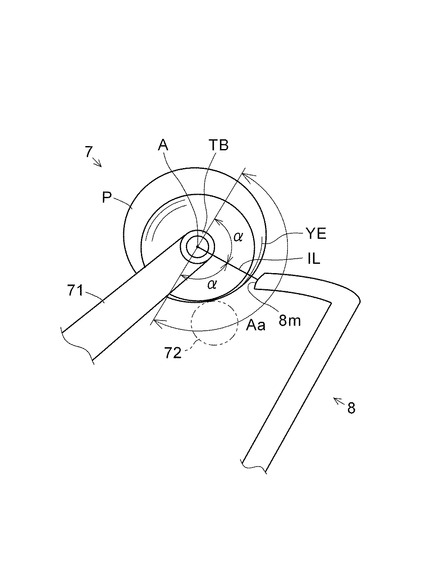
図4に示すように、捕捉範囲Aaは、パッケージPの回転軸Aと捕捉部8の吸入口8mとを結ぶ仮想線ILを基準として、パッケージPの回転軸Aを中心に仮想線ILから所定の角度αとなる範囲と定義される。本実施形態に係る糸巻取機100において、所定の角度αは、略90度とされている。略90度という値は、捕捉部8による糸端YEの捕捉が成功する確率をパラメータとし、実証試験を繰り返すことによって求められた値である。
【0059】
このような構成により、糸巻取機100は、パッケージPの糸端YEが捕捉範囲Aa内で止まるように該パッケージPの回転を停止できる。上述したように、捕捉範囲Aaとは、パッケージPの糸端YEを捕捉できる可能性が高くなる範囲である。そして、仮想線ILからパッケージPの回転方向及び反回転方向に略90度となる範囲は、パッケージPの糸端YEを捕捉できる可能性が更に高くなる範囲である。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0060】
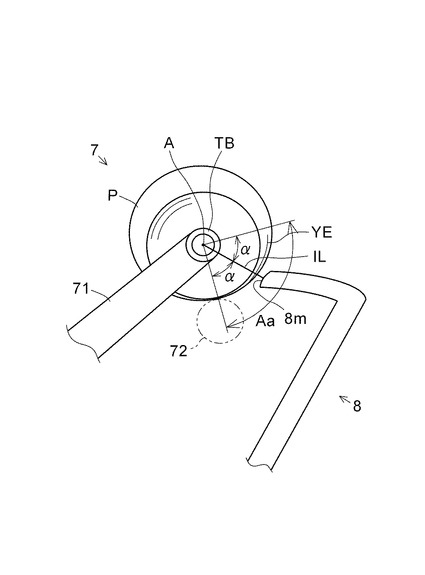
また、捕捉部8による糸端YEの捕捉が成功する確率を更に向上させるには、捕捉範囲Aaを減縮することによって達成できる。具体的には、図5に示すように、所定の角度αを略45度とすることである。略45度という値は、捕捉部8による糸端YEの捕捉が成功する確率をパラメータとし、実証試験を繰り返すことによって求められた値である。
【0061】
仮想線ILからパッケージPの回転方向及び反回転方向に略45度となる範囲は、パッケージPの糸端YEを捕捉できる可能性が最も高くなる範囲である。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0062】
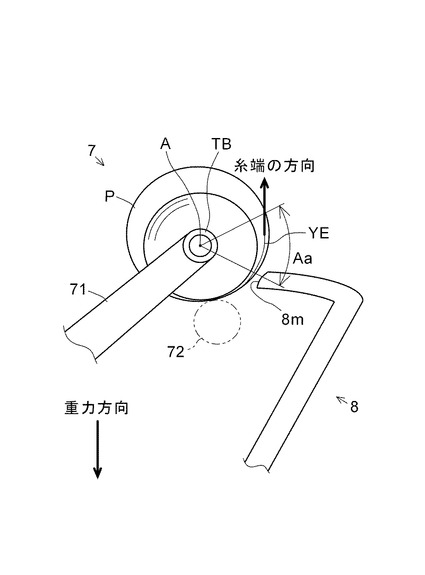
なお、捕捉部8による糸端YEの捕捉が成功する確率を向上させるには、重力の影響を考慮することによっても達成できる。具体的には、図6に示すように、パッケージPの糸端YEが反重力方向に略沿うようにして止まる範囲を捕捉範囲Aaとする。これは、糸端YEが反重力方向に略沿うようにして止まった場合、該糸端YEがパッケージPに巻き付かず、該パッケージPの表面から浮き上がった状態になるためである。図6中に示す矢印は、重力方向と糸端YEの方向を示している。
【0063】
このように、パッケージPの糸端YEが反重力方向に略沿うようにして止まる範囲は、パッケージPの糸端YEが該パッケージPの表面から浮き上がる範囲である。従って、パッケージPの糸端YEが捕捉範囲Aa内で止まると、捕捉部8がパッケージPの糸端YEを捕捉できる可能性が高くなる。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0064】
更に、本糸巻取機100は、パッケージPを接触ローラ72から離間できる構成である(例えば特開2010−13259参照)。このため、糸巻取機100は、捕捉部8による糸端YEの捕捉に際してパッケージPを回転させても接触ローラ72が糸端YEを押圧することはない。しかし、パッケージPを接触ローラ72から離間できない構成である場合は、以下の構成とすることに利点がある。
【0065】
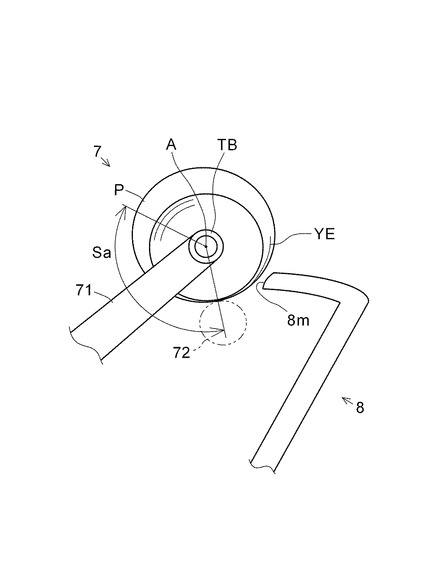
即ち、図7に示すように、パッケージPの糸端YEが押圧範囲Sa外で止まるように該パッケージPの回転を停止させることが重要となる。押圧範囲Saとは、パッケージPの糸端YEを捕捉する際に該パッケージPを回転させると接触ローラ72によって押圧される範囲である。
【0066】
具体的に説明すると、糸巻取機100は、捕捉部8による糸端YEの捕捉に際してパッケージPを逆転(反巻取方向に回転)させる(図3参照)。このため、糸端YEが押圧範囲Sa内で止まった場合、該糸端YEは、接触ローラ72によって押圧され、パッケージPの表面に張り付くこととなる。従って、パッケージPの糸端YEが押圧範囲Sa外で止まると、捕捉部8がパッケージPの糸端YEを捕捉できる可能性が高くなる。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0067】
次に、パッケージPの糸端YEが任意位置で止まるように該パッケージPの回転を停止できる構成について説明する。
【0068】
パッケージ駆動部73は、回転軸の角度位相を検出できる角度位相検出部(エンコーダ:図示せず)を備えている。パッケージ駆動部73の回転軸の角度位相は、パッケージPの糸端YEと相関関係を有している。従って、制御部10は、糸端YEがパッケージPに到達するまでの該パッケージPの回転数を認識できる。また、制御部10は、パッケージ駆動部73からの角度位相信号に基づいて、パッケージPの糸端YEの位置を間接的に把握できる。
【0069】
制御部10は、糸情報検出部5又はカッタ52からの信号に基づいて、紡績糸Yの不連続を把握した場合、糸情報検出部5又はカッタ52からパッケージPまでの距離、パッケージPの外径及びパッケージ駆動部73からの角度位相信号から、パッケージ駆動部73の回転量をどの程度にするとパッケージP側の糸端YEをどの位置で止めることができるかを算出することができる。
【0070】
パッケージPの回転を停止させる制御において、糸端YEが捕捉範囲Aaを超えて止まる可能性がある場合、制御部10は、糸端YEを捕捉範囲Aa内で止めるため、パッケージPの制動時間が短縮するようにパッケージ駆動部73を制御する。一方、パッケージPの回転を停止させる制御において、糸端YEが捕捉範囲Aaの手前で止まる可能性がある場合、制御部10は、糸端YEを捕捉範囲Aa内で止めるため、パッケージPの制動時間が助長するようにパッケージ駆動部73を制御する。
【0071】
次に、更に具体的な構成及び制御態様について説明する。
【0072】
本糸巻取機100は、ボビン保持部71に回転速度検出部75を備えている(図1参照)。回転速度検出部75は、回転するパルス盤からパルス信号を検出し、該パルス信号を制御部10へ送信する。制御部10は、単位時間当たりに受信したパルス信号に基づいてパッケージP(ボビンTB)の回転数(回転速度)を算出する。
【0073】
更に、本糸巻取機100は、巻取量検出部76を備えている。巻取量検出部76は、走行する紡績糸Yからパルス信号を検出し、該パルス信号を制御部10へ送信する。制御部10は、受信したパルス信号を積算することによって巻き取られた紡績糸Yの長さを認識できる。そして、制御部10は、巻き取られた紡績糸Yの長さからパッケージPの外径を算出する。詳細に説明すると、制御部10は、巻き取られた紡績糸Yの長さと紡績糸Yの種類(番手)に基づいてパッケージPの外径を算出できる。また、巻き取られた紡績糸Yの長さと紡績糸Yの種類(番手)に相当するパッケージPの外径を予め把握しておくことによって算出処理を簡素化できる。
【0074】
従って、制御部10は、紡績糸Yの走行量(糸情報検出部5又はカッタ52からパッケージPまでの距離、糸端YEが糸情報検出部5からパッケージPまで走行するのに要する時間及び/又は糸端YEが糸情報検出部5からパッケージPまで走行する際の走行速度)と、パッケージPの外径と、パッケージPの回転量とに基づいて、糸端YEが任意位置で止まるようにパッケージ駆動部73を制御できる。
【0075】
なお、巻取量検出部は、ボビン保持部71に取り付けられる、例えばアナログセンサやアブソリュート型センサ等の角度センサであっても良い。角度センサである巻取量検出部は、ボビン保持部71の揺動角度を検出できる。ボビン保持部71の揺動角度は、パッケージPの外径と相関関係を有する。そのため、巻取量検出部は、ボビン保持部71の揺動角度を検出することによって、間接的にパッケージPの外径を検出できる。
【0076】
更に、巻取量検出部は、紡績糸Yの巻き取り時間を計測するタイマーであっても良い。制御部10は、計測された巻き取り時間に基づいて巻き取られた紡績糸Yの長さを認識できる。そして、制御部10は、巻き取られた紡績糸Yの長さからパッケージPの外径を算出する。なお、このような構成において、制御部10は、紡績糸Yの巻き取りを中断しているときにはタイマー機能を停止し、紡績糸Yの巻き取り時間を正確に計測する。
【0077】
その他の実施形態として、糸巻取機100は、紡績糸Yの走行速度を算出する速度検出部を紡績糸Yの走行経路に配置しても良い。この場合、制御部10は、紡績糸Yの走行速度と綾振ガイド61の駆動速度から綾角を算出することが可能である。これにより、制御部10は、綾角とパッケージPの周速度とパッケージPの回転数から該パッケージPの外径を算出できる。
【0078】
このような構成により、糸巻取機100は、パッケージPの回転速度と巻取量(パッケージPの外径と同義)に基づいてパッケージ駆動部73を制御できる。これにより、パッケージPの糸端YEを正確に任意位置で止めることができる。
【0079】
更に、本糸巻取機100においては、パッケージ駆動部73の動力源としてサーボモータを用いるため、フィードバック制御を実現できる。これにより、パッケージPの糸端を正確に任意位置で止めることができる。
【符号の説明】
【0080】
1 給糸部
2 糸解舒補助部
3 張力付与部
4 糸継部
5 糸情報検出部
6 綾振部
7 巻取部
71 ボビン保持部
72 接触ローラ
73 パッケージ駆動部
75 回転速度検出部
76 巻取量検出部
8 捕捉部
8m 吸入口
9 案内部
10 制御部
100 糸巻取機
A 回転軸
Aa 捕捉範囲
Sa 押圧範囲
IL 仮想線
P パッケージ
SB 給糸ボビン
TB ボビン
Y 紡績糸
YE 糸端
【技術分野】
【0001】
本発明は、紡績糸を巻き取ることによってパッケージを作成する糸巻取機の技術に関する。
【背景技術】
【0002】
従来より、ボビンを回転させることによって紡績糸を巻き取り、該ボビン上にパッケージを作成する糸巻取機が知られている(例えば特許文献1参照)。糸巻取機には、パッケージの糸端を捕捉する捕捉部と、糸端どうしを継ぎ合わせる糸継部と、が備えられている。
【0003】
図8(a)に示すように、捕捉部8cは、空気を吸入することによって糸端YEcを捕捉する。その後、捕捉部8cは、糸端YEcを吸入保持した状態で回動し、紡績糸YcをパッケージPcから引き出す。糸継部は、パッケージPcから引き出された紡績糸Ycの糸端YEcと給糸ボビン側の糸端を継ぎ合わせる(図示せず)。このように、糸巻取機は、パッケージPc側の糸端YEcと給糸ボビン側の糸端を継ぎ合わせることによって、パッケージPcの作成を再開できる。従って、糸巻取機の稼動率は、捕捉部8cによる糸端YEcの捕捉が成功するか否かによって影響を受けることとなる。
【0004】
具体的に説明すると、図8(b)に示すように、捕捉部8cが糸端YEcを捕捉できない場合は、糸継ができないことから稼動停止するしかなく、糸巻取機の稼動率が低下する。また、図8(c)に示すように、捕捉部8cが紡績糸Ycの中途部を吸入した場合も、糸継ができないことから稼動停止するしかなく、糸巻取機の稼動率が低下する。更に、図8(d)に示すように、捕捉部8cが紡績糸Ycの中途部を吸入したことによって該紡績糸Ycが切れた場合は、パッケージPcに屑糸Wが混入する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2011−144029号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、かかる問題を解決すべくなされたものであり、紡績糸を巻き取ることによって作成されたパッケージの糸端を容易に捕捉できる技術を提供することを目的としている。
【課題を解決するための手段】
【0007】
第1の発明は、紡績糸を巻き取ることによってパッケージを作成する糸巻取機に関する。本発明の実施形態に係る糸巻取機は、ボビン保持部と、糸情報検出部と、パッケージ駆動部と、制御部と、を備える。ボビン保持部は、ボビンを回転自在に保持する。糸情報検出部は、ボビンに巻き取られる紡績糸の連続又は不連続を検出できる。パッケージ駆動部は、ボビン及び該ボビン上に作成されたパッケージを回転させる。制御部は、糸情報検出部からの検出信号に基づいてパッケージ駆動部を制御できる。制御部は、糸情報検出部が紡績糸の不連続を検出した場合、パッケージの糸端が所定の位置で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0008】
第2の発明は、第1の発明に係る糸巻取機に関する。本発明の実施形態に係る糸巻取機は、捕捉部を具備する。捕捉部は、紡績糸の糸端を捕捉する。制御部は、パッケージの糸端が捕捉部の近傍で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0009】
第3の発明は、第2の発明に係る糸巻取機に関する。捕捉部は、空気を吸入することによってパッケージの糸端を捕捉する。
【0010】
第4の発明は、第3の発明に係る糸巻取機に関する。パッケージの回転軸と捕捉部の吸入口とを結ぶ仮想線を基準として、該パッケージの回転軸を中心に仮想線から所定の角度となる捕捉範囲が定められる。制御部は、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0011】
第5の発明は、第4の発明に係る糸巻取機に関する。捕捉範囲は、仮想線からパッケージの回転方向及び反回転方向に略90度の範囲とする。
【0012】
第6の発明は、第4の発明に係る糸巻取機に関する。捕捉範囲は、仮想線からパッケージの回転方向及び反回転方向に略45度の範囲とする。
【0013】
第7の発明は、第4の発明に係る糸巻取機に関する。捕捉範囲は、パッケージの糸端が反重力方向に略沿うようにして止まる範囲とする。
【0014】
第8の発明は、第1から第7のいずれかの発明に係る糸巻取機に関する。本発明の実施形態に係る糸巻取機は、接触ローラを具備する。接触ローラは、パッケージと接触した状態で回転する。また、糸情報検出部が前記紡績糸の不連続を検出した場合にパッケージを回転させると接触ローラによって押圧される押圧範囲が定められる。制御部は、パッケージの糸端が押圧範囲外で止まるように該パッケージの回転を停止させるようにパッケージ駆動部を制御する。
【0015】
第9の発明は、第1から第8のいずれかの発明に係る糸巻取機に関する。本発明の実施形態に係る糸巻取機は、回転速度検出部と、巻取量検出部と、を具備する。回転速度検出部は、パッケージの回転速度を検出する。巻取量検出部は、パッケージの巻取量を検出する。制御部は、パッケージの回転速度と巻取量に基づいてパッケージ駆動部を制御する。
【0016】
第10の発明は、第1から第9のいずれかの発明に係る糸巻取機に関する。パッケージ駆動部は、サーボモータを用いて構成される。
【発明の効果】
【0017】
本発明の効果として、以下に示すような効果を奏する。
【0018】
第1の発明によれば、パッケージの糸端が所定の位置で止まるように該パッケージの回転を停止できる。これにより、パッケージの糸端を容易に捕捉することが可能となる。
【0019】
第2の発明によれば、パッケージの糸端が捕捉部の近傍で止まるように該パッケージの回転を停止できる。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0020】
第3の発明によれば、パッケージの糸端が捕捉部の近傍で止まるように該パッケージの回転を停止できているため、捕捉部は、空気の吸入によって糸端を捕捉する場合であっても、紡績糸の中途部を吸入することを回避して糸端を捕捉することができる。
【0021】
第4の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。捕捉範囲とは、パッケージの糸端を捕捉できる可能性が高くなる範囲である。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0022】
第5の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。仮想線からパッケージの回転方向及び反回転方向に略90度となる捕捉範囲は、捕捉部がパッケージの糸端を捕捉できる可能性が更に高くなる範囲である。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0023】
第6の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。仮想線からパッケージの回転方向及び反回転方向に略45度となる捕捉範囲は、捕捉部がパッケージの糸端を捕捉できる可能性が最も高くなる範囲である。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0024】
第7の発明によれば、パッケージの糸端が捕捉範囲内で止まるように該パッケージの回転を停止できる。パッケージの糸端が反重力方向に略沿うようにして止まる捕捉範囲は、パッケージの糸端が該パッケージの表面から浮き上がる範囲である。従って、パッケージの糸端が捕捉範囲内で止まると、捕捉部がパッケージの糸端を捕捉できる可能性が高くなる。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0025】
第8の発明によれば、パッケージの糸端が押圧範囲外で止まるように該パッケージの回転を停止できる。押圧範囲とは、パッケージの糸端を捕捉する際に該パッケージを回転させると接触ローラによって押圧される範囲である。従って、パッケージの糸端が押圧範囲外で止まると、捕捉部がパッケージの糸端を捕捉できる可能性が高くなる。これにより、捕捉部によってパッケージの糸端を容易に捕捉することが可能となる。
【0026】
第9の発明によれば、パッケージの回転量と巻取量に基づいてパッケージ駆動部を制御できる。これにより、パッケージの糸端を正確に任意位置で止めることができる。
【0027】
第10の発明によれば、サーボモータを用いることでフィードバック制御を実現できる。これにより、パッケージの糸端を正確に任意位置で止めることができる。
【図面の簡単な説明】
【0028】
【図1】糸巻取機100の全体構成を示す概略図。
【図2】糸端YEの捕捉動作を示す側面図。
【図3】糸端YEの引出動作を示す側面図。
【図4】糸端YEの停止位置を示す図。
【図5】糸端YEの停止位置を示す図。
【図6】糸端YEの停止位置を示す図。
【図7】糸端YEの停止位置を示す図。
【図8】従来の糸巻取機における糸端YEの捕捉時の状態を示す図。
【発明を実施するための形態】
【0029】
まず、本発明の一実施形態に係る糸巻取機100について説明する。
【0030】
図1は、糸巻取機100の全体構成を示す概略図である。図中の白矢印は、紡績糸Yの送り方向を示している。また、図2は、糸端YEの捕捉動作を示す側面図である。図3は、糸端YEの引出動作を示す側面図である。
【0031】
糸巻取機100には、給糸部1が備えられている。給糸部1には、紡績糸Yが巻かれた給糸ボビンSBが装着される。糸巻取機100には、給糸ボビンSBから解舒された紡績糸Yの送り方向に沿って、糸解舒補助部2、張力付与部3、糸継部4、糸情報検出部5、綾振部6、巻取部7が備えられている。更に、糸巻取機100には、捕捉部8、案内部9及び制御部10が備えられている。
【0032】
糸解舒補助部2は、給糸ボビンSBに巻かれた紡績糸Yの解舒を補助する。糸解舒補助部2は、給糸ボビンSBから解舒された紡績糸Yが遠心力によって広がることを制限する。
【0033】
張力付与部3は、給糸ボビンSBから解舒された紡績糸Yに所定の張力を付与する。張力付与部3は、紡績糸Yに所定の張力を付与することによって、該紡績糸Yの高速巻き取りを可能としている。なお、張力付与部3として、櫛歯によって紡績糸Yに張力を付与するゲート式テンサーの他、ディスク式テンサー等を用いることが可能である。
【0034】
糸継部4は、紡績糸Yの糸端YEどうしを継ぎ合わせる。糸継部4は、例えば紡績糸Yが切れた場合に、分断された紡績糸Yの糸端YEどうしを継ぎ合わせる。なお、糸継部4として、旋回気流によって紡績糸Yの糸端YEどうしを継ぎ合わせるエアスプライサ装置の他、機械式スプライサ装置等を用いることが可能である。
【0035】
糸情報検出部5は、紡績糸Yの欠点部を検出する。また、糸情報検出部5は、紡績糸Yの連続又は不連続を検出する。糸情報検出部5は、発光ダイオードを光源として紡績糸Yを照射し、該紡績糸Yからの反射光量を測定することによって、紡績糸Yの欠点部の有無及び紡績糸Yの連続又は不連続を検出できる。具体的には、アナライザ51が糸情報検出部5からの検出信号を分析することによって、紡績糸Yの欠点部の有無及び紡績糸Yの連続又は不連続が判断される。なお、糸情報検出部5の近傍には、紡績糸Yを切断できるカッタ52が付設されている。ユニット制御部10cは、カッタ52による紡績糸Yの切断信号によって紡績糸Yの不連続を把握することも可能である。
【0036】
ここで、紡績糸Yの欠点部とは、紡績糸Yの一部が太過ぎる(太糸)若しくは細過ぎる(細糸)異常の他、紡績糸Yに異物が介在している場合が含まれる。また、紡績糸Yの不連続とは、紡績糸Yがカッタ52によって切断された場合や異常な張力が掛かって切れた場合、給糸ボビンSBに巻かれていた紡績糸Yが全て解舒された場合を含む概念である。なお、糸情報検出部5として、上記のような光学式センサの他、静電容量式センサ等を用いることが可能である。
【0037】
綾振部6は、パッケージPに導かれる紡績糸Yを綾振する。綾振部6は、綾振ガイド61と綾振ガイド駆動部62を備える。綾振ガイド駆動部62は、綾振ガイド駆動制御部10aからの制御信号に基づいて綾振ガイド61を駆動する。綾振ガイド駆動制御部10aは、ユニット制御部10cからの指示に基づいて綾振ガイド駆動部62に制御信号を伝達する。なお、制御部10は、綾振ガイド駆動制御部10aやユニット制御部10cを含む概念である。
【0038】
綾振ガイド61は、紡績糸Yを引っ掛けるフック部が設けられたアーム部材である。綾振ガイド61は、フック部に紡績糸Yを引っ掛けた状態でボビンTBの回転軸方向に往復し(図1中黒矢印参照)、紡績糸Yを綾振する。
【0039】
綾振ガイド駆動部62は、主にサーボモータを用いて構成される。綾振ガイド駆動部62は、サーボモータの回転軸を正転又は逆転することによって、綾振ガイド61を往復させる。なお、綾振ガイド駆動部62は、動力源としてサーボモータを用いているが、例えばステッピングモータ等であっても良く、モータの種類は問わない。また、サーボモータの回転軸の方向、即ち、綾振ガイド61の取り付け方向についても限定しない。
【0040】
このように、綾振部6は、往復する綾振ガイド61によって紡績糸Yを綾振する、いわゆるアーム式トラバース装置を構成している。しかし、アーム式トラバース装置の他、ベルト式トラバース装置や羽根トラバース装置等を用いることが可能である。また、本糸巻取機100は、パッケージPに接触した状態で回転するドラムを設け、該ドラムの表面に形成された案内溝によって紡績糸Yを綾振する構成、即ち、綾振ドラム方式であっても良い。
【0041】
巻取部7は、ボビンTBを回転させて紡績糸Yを巻き取る。巻取部7は、ボビン保持部71と接触ローラ72とパッケージ駆動部73を備える。パッケージ駆動部73は、パッケージ駆動制御部10bからの制御信号に基づいてボビンTBを回転させる。パッケージ駆動制御部10bは、ユニット制御部10cからの指示に基づいてパッケージ駆動部73に制御信号を伝達する。なお、制御部10は、パッケージ駆動制御部10bやユニット制御部10cを含む概念である。
【0042】
ボビン保持部71は、ボビンTBを脱着自在に把持するベアリングを備え、該ボビンTBを回転自在に保持する。また、ボビン保持部71は、揺動軸74を中心に揺動可能に構成されている(図2中矢印参照)。従って、ボビン保持部71は、紡績糸Yが巻かれることによってパッケージPの外径が大きくなった場合でも、接触ローラ72がパッケージPの表面を一定の荷重で押すことを可能としている。
【0043】
接触ローラ72は、回転するパッケージPによって従動回転する。接触ローラ72は、パッケージPの表面を押圧することによって、該パッケージPの形状を整える。なお、接触ローラ72は、略円筒形状の回転体であるが、例えばコーン形状の回転体であっても良く、形状は問わない。
【0044】
パッケージ駆動部73は、主にサーボモータを用いて構成される。パッケージ駆動部73は、サーボモータを駆動することによって、ボビンTB及び該ボビンTB上に作成されたパッケージPを回転させる。なお、パッケージ駆動部73は、動力源としてサーボモータを用いているが、例えばステッピングモータ等であっても良く、モータの種類は問わない。なお、パッケージ駆動部73の動力源としてサーボモータを用いる利点については後述する。
【0045】
このように、巻取部7は、パッケージ駆動部73によってパッケージPが主動回転され、該パッケージPの回転に伴って接触ローラ72が従動回転するように構成されている。しかし、パッケージ駆動部73によって接触ローラ72が主動回転され、該接触ローラ72の回転に伴ってパッケージPが従動回転するように構成しても良い。
【0046】
捕捉部8は、紡績糸Yが不連続となった場合に、パッケージPに巻き取られた紡績糸Yの糸端(上糸)YEを捕捉する。また、捕捉部8は、糸端YEを吸入保持した状態で回動し、紡績糸YをパッケージPから引き出す。具体的に説明すると、捕捉部8は、糸継動作の開始に際して吸引口8mが待機位置からパッケージPの近傍へ移動するように回動し(図2中矢印参照)、吸入口8mから空気を吸入することによって糸端YEを捕捉する。そして、捕捉部8は、糸端YEを吸入保持した状態で吸引口8mがパッケージPの近傍から糸継部4の上流側へ移動するように回動し(図3中矢印参照)、紡績糸YをパッケージPから引き出す。このとき、パッケージ駆動部73は、ボビンTB及びパッケージPを逆転させる(図3中矢印参照)。なお、捕捉部8として、上記のようなサクションアーム方式の他、固定されたサクション管にスリットを設けて紡績糸Yを引き出す構成とすることも可能である。
【0047】
案内部9は、紡績糸Yが不連続となった場合に、給糸ボビンSBに巻かれた紡績糸Yの糸端(下糸)YEを捕捉する。また、案内部9は、糸端YEを吸入保持した状態で回動し、紡績糸Yを給糸ボビンSBから解舒する。具体的に説明すると、案内部9は、吸入口9mから空気を吸入することによって糸端YEを捕捉する。そして、案内部9は、糸端YEを吸入保持した状態で吸引口9mが給糸ボビンSBの近傍から糸継部4の下流側へ移動するように回動し(図3中矢印参照)、紡績糸Yを給糸ボビンSBから解舒する。
【0048】
その後、捕捉部8によって所定の位置に配置された紡績糸Yの糸端YEと案内部9によって所定の位置に配置された紡績糸Yの糸端YEは、糸継部4によって継ぎ合わされる。このように、糸巻取機100は、パッケージPに巻き取られた紡績糸Yの糸端YEと給糸ボビンSBに巻かれた紡績糸Yの糸端YEを継ぎ合わせることによって、パッケージPの作成を再開できる。従って、糸巻取機100の稼動率は、捕捉部8による糸端YEの捕捉が成功するか否かによって影響を受けることとなる。
【0049】
次に、捕捉部8による糸端YEの捕捉が成功するように構成された、本糸巻取機100の特徴点について説明する。
【0050】
本糸巻取機100の特徴点は、パッケージPの回転が完全に停止するまで該パッケージPの回転状態を制御できる点にある。従って、糸巻取機100は、パッケージPに巻き取られた紡績糸Yの糸端YEが所定の位置で止まるようにパッケージ駆動部73を制御できる。
【0051】
具体的に説明すると、糸巻取機100は、糸情報検出部5が紡績糸Yの不連続を検出した場合にパッケージPの回転を停止させる。従来の糸巻取機においては、パッケージ駆動部73のサーボモータ用電源を遮断することによって、パッケージPの回転を停止させる構成であった。しかし、本実施形態に係る糸巻取機100は、ドライバへ送信される指令パルスを適宜に調整することによって、パッケージPの回転状態を制御しながら該パッケージPの回転を停止できる。なお、パッケージ駆動部73に電磁ブレーキ等の制動装置を搭載してパッケージPの回転を停止させるとしても良い。
【0052】
更に、糸巻取機100は、パッケージPの回転を停止させた後に再びパッケージPを回転させることによって、糸端YEを任意位置で止めることも可能である。これは、制御部10がパッケージPの回転状態を自由に制御できるため、簡単な制御プログラムによって実現できる。パッケージPの回転を停止させた後に再びパッケージPを回転させることによって、糸端YEを任意位置で止める構成も、本発明の技術的範囲に含まれる。
【0053】
このような構成により、糸巻取機100は、パッケージPの糸端YEが所定の位置で止まるように該パッケージPの回転を停止できる。これにより、捕捉部8は、パッケージPの糸端YEを容易に捕捉することが可能となる。
【0054】
また、本実施形態に係る糸巻取機100において、「所定の位置」とは、捕捉部8の近傍を指す。より詳細に説明すると、「所定の位置」とは、糸端YEを捕捉する際の吸入口8mの近傍を意味する(図2参照)。
【0055】
このような構成により、糸巻取機100は、パッケージPの糸端YEが捕捉部8の近傍で止まるように該パッケージPの回転を停止できる。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0056】
なお、捕捉部8は、空気を吸入することによって糸端YEを捕捉する構造である。このため、従来の糸巻取機においては、捕捉部8が紡績糸Yの中途部を吸入する可能性があった(図8(c)、図8(d)参照)。しかし、本糸巻取機100は、パッケージPの糸端YEが捕捉部8の近傍で止まるように該パッケージPの回転を停止できるため、捕捉部8が紡績糸Yの中途部を吸入することを防止できる。
【0057】
次に、「捕捉部8の近傍」について更に具体的に特定する。「捕捉部8の近傍」とは、捕捉部8によって糸端YEを捕捉できる可能性が高くなる範囲を意味する。ここでは、捕捉部8によって糸端YEを捕捉できる可能性が高くなる範囲を捕捉範囲Aaとする。
【0058】
図4に示すように、捕捉範囲Aaは、パッケージPの回転軸Aと捕捉部8の吸入口8mとを結ぶ仮想線ILを基準として、パッケージPの回転軸Aを中心に仮想線ILから所定の角度αとなる範囲と定義される。本実施形態に係る糸巻取機100において、所定の角度αは、略90度とされている。略90度という値は、捕捉部8による糸端YEの捕捉が成功する確率をパラメータとし、実証試験を繰り返すことによって求められた値である。
【0059】
このような構成により、糸巻取機100は、パッケージPの糸端YEが捕捉範囲Aa内で止まるように該パッケージPの回転を停止できる。上述したように、捕捉範囲Aaとは、パッケージPの糸端YEを捕捉できる可能性が高くなる範囲である。そして、仮想線ILからパッケージPの回転方向及び反回転方向に略90度となる範囲は、パッケージPの糸端YEを捕捉できる可能性が更に高くなる範囲である。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0060】
また、捕捉部8による糸端YEの捕捉が成功する確率を更に向上させるには、捕捉範囲Aaを減縮することによって達成できる。具体的には、図5に示すように、所定の角度αを略45度とすることである。略45度という値は、捕捉部8による糸端YEの捕捉が成功する確率をパラメータとし、実証試験を繰り返すことによって求められた値である。
【0061】
仮想線ILからパッケージPの回転方向及び反回転方向に略45度となる範囲は、パッケージPの糸端YEを捕捉できる可能性が最も高くなる範囲である。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0062】
なお、捕捉部8による糸端YEの捕捉が成功する確率を向上させるには、重力の影響を考慮することによっても達成できる。具体的には、図6に示すように、パッケージPの糸端YEが反重力方向に略沿うようにして止まる範囲を捕捉範囲Aaとする。これは、糸端YEが反重力方向に略沿うようにして止まった場合、該糸端YEがパッケージPに巻き付かず、該パッケージPの表面から浮き上がった状態になるためである。図6中に示す矢印は、重力方向と糸端YEの方向を示している。
【0063】
このように、パッケージPの糸端YEが反重力方向に略沿うようにして止まる範囲は、パッケージPの糸端YEが該パッケージPの表面から浮き上がる範囲である。従って、パッケージPの糸端YEが捕捉範囲Aa内で止まると、捕捉部8がパッケージPの糸端YEを捕捉できる可能性が高くなる。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0064】
更に、本糸巻取機100は、パッケージPを接触ローラ72から離間できる構成である(例えば特開2010−13259参照)。このため、糸巻取機100は、捕捉部8による糸端YEの捕捉に際してパッケージPを回転させても接触ローラ72が糸端YEを押圧することはない。しかし、パッケージPを接触ローラ72から離間できない構成である場合は、以下の構成とすることに利点がある。
【0065】
即ち、図7に示すように、パッケージPの糸端YEが押圧範囲Sa外で止まるように該パッケージPの回転を停止させることが重要となる。押圧範囲Saとは、パッケージPの糸端YEを捕捉する際に該パッケージPを回転させると接触ローラ72によって押圧される範囲である。
【0066】
具体的に説明すると、糸巻取機100は、捕捉部8による糸端YEの捕捉に際してパッケージPを逆転(反巻取方向に回転)させる(図3参照)。このため、糸端YEが押圧範囲Sa内で止まった場合、該糸端YEは、接触ローラ72によって押圧され、パッケージPの表面に張り付くこととなる。従って、パッケージPの糸端YEが押圧範囲Sa外で止まると、捕捉部8がパッケージPの糸端YEを捕捉できる可能性が高くなる。これにより、捕捉部8によってパッケージPの糸端YEを容易に捕捉することが可能となる。
【0067】
次に、パッケージPの糸端YEが任意位置で止まるように該パッケージPの回転を停止できる構成について説明する。
【0068】
パッケージ駆動部73は、回転軸の角度位相を検出できる角度位相検出部(エンコーダ:図示せず)を備えている。パッケージ駆動部73の回転軸の角度位相は、パッケージPの糸端YEと相関関係を有している。従って、制御部10は、糸端YEがパッケージPに到達するまでの該パッケージPの回転数を認識できる。また、制御部10は、パッケージ駆動部73からの角度位相信号に基づいて、パッケージPの糸端YEの位置を間接的に把握できる。
【0069】
制御部10は、糸情報検出部5又はカッタ52からの信号に基づいて、紡績糸Yの不連続を把握した場合、糸情報検出部5又はカッタ52からパッケージPまでの距離、パッケージPの外径及びパッケージ駆動部73からの角度位相信号から、パッケージ駆動部73の回転量をどの程度にするとパッケージP側の糸端YEをどの位置で止めることができるかを算出することができる。
【0070】
パッケージPの回転を停止させる制御において、糸端YEが捕捉範囲Aaを超えて止まる可能性がある場合、制御部10は、糸端YEを捕捉範囲Aa内で止めるため、パッケージPの制動時間が短縮するようにパッケージ駆動部73を制御する。一方、パッケージPの回転を停止させる制御において、糸端YEが捕捉範囲Aaの手前で止まる可能性がある場合、制御部10は、糸端YEを捕捉範囲Aa内で止めるため、パッケージPの制動時間が助長するようにパッケージ駆動部73を制御する。
【0071】
次に、更に具体的な構成及び制御態様について説明する。
【0072】
本糸巻取機100は、ボビン保持部71に回転速度検出部75を備えている(図1参照)。回転速度検出部75は、回転するパルス盤からパルス信号を検出し、該パルス信号を制御部10へ送信する。制御部10は、単位時間当たりに受信したパルス信号に基づいてパッケージP(ボビンTB)の回転数(回転速度)を算出する。
【0073】
更に、本糸巻取機100は、巻取量検出部76を備えている。巻取量検出部76は、走行する紡績糸Yからパルス信号を検出し、該パルス信号を制御部10へ送信する。制御部10は、受信したパルス信号を積算することによって巻き取られた紡績糸Yの長さを認識できる。そして、制御部10は、巻き取られた紡績糸Yの長さからパッケージPの外径を算出する。詳細に説明すると、制御部10は、巻き取られた紡績糸Yの長さと紡績糸Yの種類(番手)に基づいてパッケージPの外径を算出できる。また、巻き取られた紡績糸Yの長さと紡績糸Yの種類(番手)に相当するパッケージPの外径を予め把握しておくことによって算出処理を簡素化できる。
【0074】
従って、制御部10は、紡績糸Yの走行量(糸情報検出部5又はカッタ52からパッケージPまでの距離、糸端YEが糸情報検出部5からパッケージPまで走行するのに要する時間及び/又は糸端YEが糸情報検出部5からパッケージPまで走行する際の走行速度)と、パッケージPの外径と、パッケージPの回転量とに基づいて、糸端YEが任意位置で止まるようにパッケージ駆動部73を制御できる。
【0075】
なお、巻取量検出部は、ボビン保持部71に取り付けられる、例えばアナログセンサやアブソリュート型センサ等の角度センサであっても良い。角度センサである巻取量検出部は、ボビン保持部71の揺動角度を検出できる。ボビン保持部71の揺動角度は、パッケージPの外径と相関関係を有する。そのため、巻取量検出部は、ボビン保持部71の揺動角度を検出することによって、間接的にパッケージPの外径を検出できる。
【0076】
更に、巻取量検出部は、紡績糸Yの巻き取り時間を計測するタイマーであっても良い。制御部10は、計測された巻き取り時間に基づいて巻き取られた紡績糸Yの長さを認識できる。そして、制御部10は、巻き取られた紡績糸Yの長さからパッケージPの外径を算出する。なお、このような構成において、制御部10は、紡績糸Yの巻き取りを中断しているときにはタイマー機能を停止し、紡績糸Yの巻き取り時間を正確に計測する。
【0077】
その他の実施形態として、糸巻取機100は、紡績糸Yの走行速度を算出する速度検出部を紡績糸Yの走行経路に配置しても良い。この場合、制御部10は、紡績糸Yの走行速度と綾振ガイド61の駆動速度から綾角を算出することが可能である。これにより、制御部10は、綾角とパッケージPの周速度とパッケージPの回転数から該パッケージPの外径を算出できる。
【0078】
このような構成により、糸巻取機100は、パッケージPの回転速度と巻取量(パッケージPの外径と同義)に基づいてパッケージ駆動部73を制御できる。これにより、パッケージPの糸端YEを正確に任意位置で止めることができる。
【0079】
更に、本糸巻取機100においては、パッケージ駆動部73の動力源としてサーボモータを用いるため、フィードバック制御を実現できる。これにより、パッケージPの糸端を正確に任意位置で止めることができる。
【符号の説明】
【0080】
1 給糸部
2 糸解舒補助部
3 張力付与部
4 糸継部
5 糸情報検出部
6 綾振部
7 巻取部
71 ボビン保持部
72 接触ローラ
73 パッケージ駆動部
75 回転速度検出部
76 巻取量検出部
8 捕捉部
8m 吸入口
9 案内部
10 制御部
100 糸巻取機
A 回転軸
Aa 捕捉範囲
Sa 押圧範囲
IL 仮想線
P パッケージ
SB 給糸ボビン
TB ボビン
Y 紡績糸
YE 糸端
【特許請求の範囲】
【請求項1】
ボビンを回転自在に保持するボビン保持部と、
前記ボビンに巻き取られる紡績糸の連続又は不連続を検出できる糸情報検出部と、
前記ボビン及び該ボビン上に作成されたパッケージを回転させるパッケージ駆動部と、
前記糸情報検出部からの検出信号に基づいて前記パッケージ駆動部を制御できる制御部と、を備える糸巻取機であって、
前記制御部は、前記糸情報検出部が前記紡績糸の不連続を検出した場合、前記パッケージの糸端が所定の位置で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする糸巻取機。
【請求項2】
前記紡績糸の糸端を捕捉する捕捉部を具備し、
前記制御部は、前記パッケージの糸端が前記捕捉部の近傍で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする請求項1に記載の糸巻取機。
【請求項3】
前記捕捉部は、空気を吸入することによって前記パッケージの糸端を捕捉する、ことを特徴とする請求項2に記載の糸巻取機。
【請求項4】
前記パッケージの回転軸と前記捕捉部の吸入口とを結ぶ仮想線を基準として、該パッケージの回転軸を中心に前記仮想線から所定の角度となる捕捉範囲が定められ、
前記制御部は、前記パッケージの糸端が前記捕捉範囲内で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする請求項3に記載の糸巻取機。
【請求項5】
前記捕捉範囲は、前記仮想線から前記パッケージの回転方向及び反回転方向に略90度の範囲とする、ことを特徴とする請求項4に記載の糸巻取機。
【請求項6】
前記捕捉範囲は、前記仮想線から前記パッケージの回転方向及び反回転方向に略45度の範囲とする、ことを特徴とする請求項4に記載の糸巻取機。
【請求項7】
前記捕捉範囲は、前記パッケージの糸端が反重力方向に略沿うようにして止まる範囲とする、ことを特徴とする請求項4に記載の糸巻取機。
【請求項8】
前記パッケージと接触した状態で回転する接触ローラを具備し、
前記糸情報検出部が前記紡績糸の不連続を検出した場合に前記パッケージを回転させると前記接触ローラによって押圧される押圧範囲が定められ、
前記制御部は、前記パッケージの糸端が前記押圧範囲外で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする請求項1から請求項7のいずれか一項に記載の糸巻取機。
【請求項9】
前記パッケージの回転量を検出する回転量検出部と、
前記パッケージの巻取量を検出する巻取量検出部と、を具備し、
前記制御部は、前記パッケージの回転量と巻取量に基づいて前記パッケージ駆動部を制御する、ことを特徴とする請求項1から請求項8のいずれか一項に記載の糸巻取機。
【請求項10】
前記パッケージ駆動部は、サーボモータを用いて構成される、ことを特徴とする請求項1から請求項9のいずれか一項に記載の糸巻取機。
【請求項1】
ボビンを回転自在に保持するボビン保持部と、
前記ボビンに巻き取られる紡績糸の連続又は不連続を検出できる糸情報検出部と、
前記ボビン及び該ボビン上に作成されたパッケージを回転させるパッケージ駆動部と、
前記糸情報検出部からの検出信号に基づいて前記パッケージ駆動部を制御できる制御部と、を備える糸巻取機であって、
前記制御部は、前記糸情報検出部が前記紡績糸の不連続を検出した場合、前記パッケージの糸端が所定の位置で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする糸巻取機。
【請求項2】
前記紡績糸の糸端を捕捉する捕捉部を具備し、
前記制御部は、前記パッケージの糸端が前記捕捉部の近傍で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする請求項1に記載の糸巻取機。
【請求項3】
前記捕捉部は、空気を吸入することによって前記パッケージの糸端を捕捉する、ことを特徴とする請求項2に記載の糸巻取機。
【請求項4】
前記パッケージの回転軸と前記捕捉部の吸入口とを結ぶ仮想線を基準として、該パッケージの回転軸を中心に前記仮想線から所定の角度となる捕捉範囲が定められ、
前記制御部は、前記パッケージの糸端が前記捕捉範囲内で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする請求項3に記載の糸巻取機。
【請求項5】
前記捕捉範囲は、前記仮想線から前記パッケージの回転方向及び反回転方向に略90度の範囲とする、ことを特徴とする請求項4に記載の糸巻取機。
【請求項6】
前記捕捉範囲は、前記仮想線から前記パッケージの回転方向及び反回転方向に略45度の範囲とする、ことを特徴とする請求項4に記載の糸巻取機。
【請求項7】
前記捕捉範囲は、前記パッケージの糸端が反重力方向に略沿うようにして止まる範囲とする、ことを特徴とする請求項4に記載の糸巻取機。
【請求項8】
前記パッケージと接触した状態で回転する接触ローラを具備し、
前記糸情報検出部が前記紡績糸の不連続を検出した場合に前記パッケージを回転させると前記接触ローラによって押圧される押圧範囲が定められ、
前記制御部は、前記パッケージの糸端が前記押圧範囲外で止まるように該パッケージの回転を停止させるように前記パッケージ駆動部を制御する、ことを特徴とする請求項1から請求項7のいずれか一項に記載の糸巻取機。
【請求項9】
前記パッケージの回転量を検出する回転量検出部と、
前記パッケージの巻取量を検出する巻取量検出部と、を具備し、
前記制御部は、前記パッケージの回転量と巻取量に基づいて前記パッケージ駆動部を制御する、ことを特徴とする請求項1から請求項8のいずれか一項に記載の糸巻取機。
【請求項10】
前記パッケージ駆動部は、サーボモータを用いて構成される、ことを特徴とする請求項1から請求項9のいずれか一項に記載の糸巻取機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−52997(P2013−52997A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−194272(P2011−194272)
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月6日(2011.9.6)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]