
糸状金属の繰出し装置
【課題】ボビン(16)に巻かれた糸状金属(7)を、円滑に、かつ、糸状金属への悪影響を与えずに、高い生産性で繰出し可能な装置を提供する。
【解決手段】ボビン(16)を取外し可能に嵌合固定可能な回転軸(17)を有する繰出しモータ(3)と、繰出しモータ(3)を軸方向に往復動させる手段(4,5)と、回転軸(17)から所定距離だけ離れて配置された案内ローラ(8)と、ボビン(16)と案内ローラ(8)間にある糸状金属(7)が案内ローラ(8)の軌道を含む仮想平面に対してなす角度を検知するセンサ(11a,11b)と、その検知に基づいて往復動させる手段(4)を駆動させる制御手段(図示せず)とを備える。
【解決手段】ボビン(16)を取外し可能に嵌合固定可能な回転軸(17)を有する繰出しモータ(3)と、繰出しモータ(3)を軸方向に往復動させる手段(4,5)と、回転軸(17)から所定距離だけ離れて配置された案内ローラ(8)と、ボビン(16)と案内ローラ(8)間にある糸状金属(7)が案内ローラ(8)の軌道を含む仮想平面に対してなす角度を検知するセンサ(11a,11b)と、その検知に基づいて往復動させる手段(4)を駆動させる制御手段(図示せず)とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ボビンに巻かれた糸半田などの糸状金属を、指定長さだけ巻き直す際に使用される糸状金属の繰出し装置に関する。
【背景技術】
【0002】
糸半田などの糸状金属は、連続鋳造後に長尺巻き用ボビンに巻かれ、出荷時に、繰出し装置と巻取り装置とからなる巻替え装置を用いて、出荷用ボビンに巻き直されて、製品となる。より具体的には、繰出し装置に取り付けられた長尺巻き用ボビンから繰り出された糸状金属は、案内ローラを経由して、巻取り装置に送り出され、巻取り装置において、出荷用ボビンに指定長さだけ巻き直される。この際、繰出し装置から送り出された糸状金属が、巻取り装置などにより引っ張られないように、巻取り装置の動作と同期して、繰出し装置においても、モータにより長尺巻き用ボビンを回転させている。
【0003】
このような糸状金属の繰出し装置により、糸状金属を送り出す際に、糸状金属が長尺巻き用ボビンから繰り出される位置と、糸状金属が最初の案内ローラに接触する位置との間を結ぶ経路と、前記モータの回転軸もしくは案内ローラの回転軸に対して鉛直な仮想平面とがなす角度が変化する。そして、糸状金属が長尺巻き用ボビンから繰り出される位置が、長尺巻き用ボビンの両端部に近づくほど、その角度は大きくなる。かかる角度が大きくなると、繰出しの際に、糸状金属同士の接触により、その表面に傷が発生したり、前記経路上にある糸状金属の振動の発生により、糸状金属が最初の案内ローラから脱落したり、繰出しの際の糸状金属同士の引っかかりにより、過大な張力が発生して、糸状金属に伸びが発生したりするといった不具合が生じる場合がある。
【0004】
そのため、一般的には、長尺巻き用ボビンと最初の案内ローラとの間の距離を大きく取り、前記角度を所定範囲内(通常は±15°以内)としている。しかし、長尺巻き用ボビンと最初の案内ローラとの間の距離が大きくなるため、前記経路上にある糸状金属に振動が発生して、同様の問題が生じうる。このため、繰出し速度を遅くすることにより対応しているが、この場合には、生産性が悪化するという問題が生ずる。
【0005】
これに対しては、たとえば特開2002−068591号公報などに記載されているように、長尺巻き用ボビンと最初の案内ローラとの間にフリーローラを設ける構造が考えられる。しかしながら、かかる構造では、フリーローラー表面と糸状金属の間で僅かにすべりが生じ糸状金属表面に傷が発生するという問題がある。また、案内ローラにダンサー機構を付与して振動抑制を図る例もあるが、糸状金属同士の接触による表面の傷の発生には、効果がない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−068591号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、生産性を悪化させることなく、長尺巻き用ボビンに巻かれた糸状金属を、円滑に、かつ、糸状金属への悪影響を生じさせることなく、繰り出すことを可能とする、糸状金属の繰出し装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、糸状金属が巻かれたボビンを取外し可能に嵌合固定可能な回転軸と、該回転軸から所定距離だけ離れて配置され、かつ、前記回転軸に固定された前記ボビンから繰り出された糸状金属が通過する軌道を有する案内ローラとを備える、糸状金属の繰出し装置に係る。
【0009】
特に、本発明においては、前記回転軸が、軸方向に往復動可能となっており、かつ、前記ボビンと前記案内ローラとの間にある糸状金属が前記軌道を含む仮想平面に対してなす角度が、所定範囲となるように前記往復動が制御されるようになっている。
【0010】
また、本発明の糸状金属の繰出し装置は、前記角度を検知する手段、例えば非接触式センサを備え、当該手段の検知に基づいて、任意の制御手段により、前記回転軸の往復動が制御される。
【0011】
より具体的には、前記センサとして、前記仮想平面を挟む2つのセンサを用い、前記角度が所定範囲にある場合、前記角度が所定範囲の一方の閾値を超えた場合、および、前記角度が所定の範囲の他方の閾値を超えた場合のいずれであるかを検知させ、それに応じて、前記回転軸を往復動させるようにして、前記角度がいずれかの閾値を超えた場合でも、所定範囲内に戻るように制御する。
【0012】
なお、前記回転軸は、繰出しモータの回転軸に相当する。また、該回転軸を含む繰出しモータを往復動させる手段としては、該繰出しモータを載置するベース板と、該ベース板に係合する台形ネジと、該台形ネジを正逆回転可能なモータとから構成したものを採用できる。該正逆回転可能モータは前記制御手段により制御され、台形ネジを回転させることで、前記ベース板を前記回転軸の軸方向に往復動させる。
【0013】
また、前記回転軸に取り付けられるボビンは、通常は製造工程で用いられる長尺巻き用ボビンであるが、その他のボビンからの巻替えにも本発明は適用可能である。
【0014】
本発明は、基本的には、ボビンから繰り出された糸状金属の該ボビンと前記案内ローラのうち最初のローラとの間の状態を制御するものである。
【発明の効果】
【0015】
本発明の糸状金属の繰出し装置は、安価で簡易に実現でき、長尺巻き用ボビンに巻かれた糸状金属を、円滑に、かつ、糸状金属への悪影響を生じさせることなく、繰り出すことが可能であり、生産性を悪化させることがないという顕著な効果を奏する。
【図面の簡単な説明】
【0016】
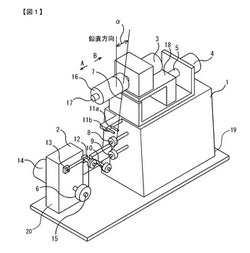
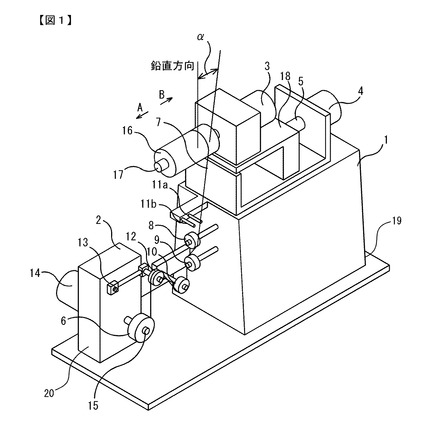
【図1】本発明の糸状金属の繰出し装置の一実施例を示す斜視図である。
【発明を実施するための形態】
【0017】
本発明について、図面を参照して詳細に説明する。図1に、本発明の糸状金属の繰出し装置を含む巻替え装置全体の一実施例を斜視図で示す。ただし、本発明は、かかる実施例により具体的に示される構造に限られることはない。
【0018】
巻替え装置全体は、繰出し装置(1)、巻取り装置(2)、および図示しない制御手段からなる。繰出し装置(1)には、製造工程内で使用される長尺巻き用ボビン(16)が、巻取り装置(2)には、出荷用ボビン(6)がそれぞれ取り付けられ、糸状金属(7)は、長尺巻き用ボビン(16)から送り出され、出荷用ボビン(6)に定尺に揃えて巻き替えられる。糸状金属(7)は、直径0.1mmから直径1.0mm程度であり、たとえば糸半田、金合金接合材、アルミニウム合金接合材などがあげられる。
【0019】
繰出し装置(1)は、基台(19)と、基台(19)の上に固定手段を介して載置される正逆回転可能モータ(4)と、正逆回転可能モータ(4)の回転軸に固定される台形ネジ(5)と、台形ネジ(5)と係合し、その回転により正逆回転可能モータ(4)の回転軸の軸方向に往復動可能なベース板(18)とを備える。
【0020】
ベース板(18)の上には、正逆回転可能モータ(4)の回転軸の軸方向と同じ方向に回転軸(17)が伸長する繰出しモータ(3)が固定される。従って、正逆回転可能モータ(4)の作動により、繰出しモータ(3)はベース板(18)の動きに伴って、軸方向に往復動するようになっている。長尺巻き用ボビン(16)は、繰出しモータ(3)の回転軸(17)に取外し可能に嵌合固定される。
【0021】
また、繰出し装置(1)は、取り付けられた長尺巻き用ボビン(16)の下方において基台(19)に取り付けられる複数の案内ローラ(8,9,10)を備える。長尺巻き用ボビン(16)から繰り出された糸状金属(7)は、最初の案内ローラ(8)、中間の案内ローラ(9)、および、最後の案内ローラ(10)と順に案内されて、巻取り装置(2)に送り出される。
【0022】
少なくとも最初の案内ローラ(8)は、その回転軸が繰出しモータ(3)の回転軸(17)と平行となるように、かつ、回転軸(17)に取り付けられた長尺巻き用ボビン(16)の軸方向中央部から繰り出された糸状金属(7)がストレートにその軌道に進入するように、配置される。図示の実施例では、このような場合、案内ローラ(8)の回転軸および繰出しモータ(3)の回転軸(17)の軸方向に対して側面側から見ると、糸状金属(7)は、長尺巻き用ボビン(16)から最初の案内ローラ(8)の軌道まで鉛直方向に送られることになる。
【0023】
なお、図示の実施例では、長尺巻き用ボビン(16)から下方に糸状金属(7)が繰り出されるが、繰出し方向は、繰出し装置(1)と巻取り装置(2)の位置関係などにより決定されるため、任意である。
【0024】
一方、巻取り装置(2)は、基台(20)と、基台(20)に固定されたモータ(14)と、基台(20)に固定された回転軸(13)に対して揺動可能に取り付けられた張力調整ガイド(12)とを備える。出荷用ボビン(6)はモータ(14)の回転軸(15)に取外し可能に嵌合固定される。張力調整ガイド(12)は、出荷用ボビン(6)の手前で、繰出し装置(1)の最後の案内ローラ(10)の後段側に配置され、バネにより糸状金属(7)に張力を付与すると共に、回転軸(13)に対する張力調整ガイド(12)の傾きの変化に応じて、図示しない制御手段により、繰出し装置(1)の繰出しモータ(3)の回転速度を制御し、糸状金属(7)に過大な張力がかからないように、また、糸状金属(7)がたるまないようにしている。
【0025】
本発明では、長尺巻き用ボビン(16)からの糸状金属(7)の繰出し位置が、長尺巻き用ボビン(16)の中央部から軸方向左右に移動することに応じて、正逆回転可能モータ(4)の作動により、回転軸(17)を軸方向に往復動させることにより、長尺巻き用ボビン(16)と最初の案内ローラ(8)との間で、糸状金属(7)が最初の案内ローラ(8)の軌道を含む仮想平面(図示の例では、鉛直方向を示す仮想線を含み、最終案内ローラ(8)の回転軸に垂直な仮想平面)に対してなす角度が常に所定範囲内にあるように制御する。なお、所定範囲とは、左右方向に±15°、好ましくは±8°、さらに好ましくは±3°である。少なくとも左右方向にそれぞれ15°を超えた場合、繰出し時における糸状金属(7)同士の接触や、糸状金属(7)の伸びという問題が生じうる。
【0026】
回転軸(17)を軸方向に往復動させる手段としての正逆回転可能モータ(4)を制御するためには、センサ、スキャン、その他の接触式もしくは非接触式の糸状金属(7)の位置ないしはその繰出し位置を検知する手段と、該検知手段による検知に基づいて正逆回転可能モータ(4)を制御する手段とを、用いることができる。
【0027】
図示の実施例では、この検知手段として、長尺巻き用のボビン(16)と最初の案内ローラ(8)との間で、最初の案内ローラ(8)の近傍に、2つの非接触式のセンサ(11a,11b)を並べて設置している。これらのセンサ(11a,11b)は、通過する糸状金属(7)を挟むように、その両側に配置される。センサ(11a,11b)として、たとえば、光センサ(竹中電子工業社製、ファイバセンサ)を使用することができる。
【0028】
センサ(11a,11b)は、糸状金属(7)が鉛直方向となす角度(α)がたとえば+2°以上の時(図1において右方向)に、センサ(11a)だけが糸状金属(7)を検知し、−2°から+2°の時に、センサ(11a,11b)の両方が糸状金属(7)を検知し、−2°以下の時(図1において左方向)に、センサ(11b)だけが糸状金属(7)を検知するように、検知能力と位置とが調整されて設置されている。検知を行う角度は、任意に調整される。あるいは、角度(α)がたとえば−2°から+2°の時には、センサ(11a,11b)の両方とも検知しないように、調整してもよい。
【0029】
なお、制御手段には、センサ(11a、11b)の検知により、正逆回転可能モータ(4)を駆動することが可能であれば、任意の公知の回路を採用できる。
【0030】
使用時には、繰出しモータ(3)の回転軸(17)に、長尺巻き用のボビン(16)を取り付けて、繰り出される糸状金属(7)を、最初の案内ローラ(8)、中間の案内ローラ(9)、および、最後の案内ローラ(10)の順に案内して、張力調整ガイド(12)を介して、巻取り装置(2)に取り付けられた出荷用ボビン(6)に巻き取られるように、セットする。
【0031】
繰出しが開始すると、糸状金属(7)が長尺巻き用ボビン(16)から繰り出される位置が、長尺巻き用ボビン(16)上においては、ボビンの左右方向、すなわち方向(A)もしくは方向(B)に移動する。
【0032】
繰出し位置が、たとえば方向(B)に移動するにつれて、角度(α)は次第に大きくなり、センサ(11a,11b)が共に糸状金属(7)を検知していた状態から、角度(α)が所定の角度である+2°より大きくなり、センサ(11b)が糸状金属(7)を検知せずに、センサ(11a)のみが糸状金属(7)を検知する状態となる。
【0033】
この時点で、センサ(11a,11b)からの信号の変化に応じて、図示しない制御手段が、正逆回転可能モータ(4)を駆動させ、台形ネジ(5)を回転させる。これにより、センサ(11b)が糸状金属(7)を再び検知するまで、ベース板(18)が方向(A)に移動する。このように制御することにより、角度(α)を常に所定範囲(上記の実施例では、±5°)内に抑えることが可能となる。
【0034】
その結果、糸状金属(7)がボビン(16)から繰り出される際に、糸状金属(7)同士が接触し、糸状金属(7)の表面に傷が発生したり、糸状金属(7)に振動が発生したり、糸状金属(7)が最初の案内ローラ(8)から脱落したり、繰出し時の糸状金属同士の引っかかりにより過大な張力が発生して糸状金属(7)に伸びが発生するなどのような不具合が抑制される。
【0035】
また、糸状金属(7)が長尺巻き用のボビン(16)から巻き出される位置と、最初の案内ローラ(8)との間の距離を、従来の約350mmから、約100mmにまで大幅に短縮することが可能になり、さらに、繰出し速度を45m/分から100m/分にすることができる。このように、繰出し速度の向上により、生産性を高く維持することが可能となる。
【0036】
図示した例においては、長尺巻き用ボビン(16)を、繰出し方向に回転させる積極的繰出し方式を示したが、糸状金属(7)の性質によっては、摩擦力または電磁力などを用いて、長尺巻き用ボビン(16)の回転力に抵抗を加えた状態で、巻取り装置(2)側の駆動力のみで繰出しを行なう消極的繰出し方式にも適応することが可能である。
【符号の説明】
【0037】
1 繰出し装置
2 巻取り装置
3 繰出しモータ
4 正逆回転可能モータ
5 台形ネジ
6 顧客へ出荷用のボビン
7 糸状金属
8 最初の案内ローラ
9 中間の案内ローラ
10 最後の案内ローラ
11a、11b センサ
12 張力調整ガイド
13 張力調整ガイドの揺動回転軸
14 巻取り用モータ
15 巻取り用モータの回転軸
16 長尺巻き用ボビン
17 繰出しモータの回転軸
18 ベース板
19 繰出し装置の基台
20 巻取り装置の基台
α ボビンと最初の案内ローラとの間にある糸状金属が鉛直方向に対してなす角度
【技術分野】
【0001】
本発明は、ボビンに巻かれた糸半田などの糸状金属を、指定長さだけ巻き直す際に使用される糸状金属の繰出し装置に関する。
【背景技術】
【0002】
糸半田などの糸状金属は、連続鋳造後に長尺巻き用ボビンに巻かれ、出荷時に、繰出し装置と巻取り装置とからなる巻替え装置を用いて、出荷用ボビンに巻き直されて、製品となる。より具体的には、繰出し装置に取り付けられた長尺巻き用ボビンから繰り出された糸状金属は、案内ローラを経由して、巻取り装置に送り出され、巻取り装置において、出荷用ボビンに指定長さだけ巻き直される。この際、繰出し装置から送り出された糸状金属が、巻取り装置などにより引っ張られないように、巻取り装置の動作と同期して、繰出し装置においても、モータにより長尺巻き用ボビンを回転させている。
【0003】
このような糸状金属の繰出し装置により、糸状金属を送り出す際に、糸状金属が長尺巻き用ボビンから繰り出される位置と、糸状金属が最初の案内ローラに接触する位置との間を結ぶ経路と、前記モータの回転軸もしくは案内ローラの回転軸に対して鉛直な仮想平面とがなす角度が変化する。そして、糸状金属が長尺巻き用ボビンから繰り出される位置が、長尺巻き用ボビンの両端部に近づくほど、その角度は大きくなる。かかる角度が大きくなると、繰出しの際に、糸状金属同士の接触により、その表面に傷が発生したり、前記経路上にある糸状金属の振動の発生により、糸状金属が最初の案内ローラから脱落したり、繰出しの際の糸状金属同士の引っかかりにより、過大な張力が発生して、糸状金属に伸びが発生したりするといった不具合が生じる場合がある。
【0004】
そのため、一般的には、長尺巻き用ボビンと最初の案内ローラとの間の距離を大きく取り、前記角度を所定範囲内(通常は±15°以内)としている。しかし、長尺巻き用ボビンと最初の案内ローラとの間の距離が大きくなるため、前記経路上にある糸状金属に振動が発生して、同様の問題が生じうる。このため、繰出し速度を遅くすることにより対応しているが、この場合には、生産性が悪化するという問題が生ずる。
【0005】
これに対しては、たとえば特開2002−068591号公報などに記載されているように、長尺巻き用ボビンと最初の案内ローラとの間にフリーローラを設ける構造が考えられる。しかしながら、かかる構造では、フリーローラー表面と糸状金属の間で僅かにすべりが生じ糸状金属表面に傷が発生するという問題がある。また、案内ローラにダンサー機構を付与して振動抑制を図る例もあるが、糸状金属同士の接触による表面の傷の発生には、効果がない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−068591号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、生産性を悪化させることなく、長尺巻き用ボビンに巻かれた糸状金属を、円滑に、かつ、糸状金属への悪影響を生じさせることなく、繰り出すことを可能とする、糸状金属の繰出し装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、糸状金属が巻かれたボビンを取外し可能に嵌合固定可能な回転軸と、該回転軸から所定距離だけ離れて配置され、かつ、前記回転軸に固定された前記ボビンから繰り出された糸状金属が通過する軌道を有する案内ローラとを備える、糸状金属の繰出し装置に係る。
【0009】
特に、本発明においては、前記回転軸が、軸方向に往復動可能となっており、かつ、前記ボビンと前記案内ローラとの間にある糸状金属が前記軌道を含む仮想平面に対してなす角度が、所定範囲となるように前記往復動が制御されるようになっている。
【0010】
また、本発明の糸状金属の繰出し装置は、前記角度を検知する手段、例えば非接触式センサを備え、当該手段の検知に基づいて、任意の制御手段により、前記回転軸の往復動が制御される。
【0011】
より具体的には、前記センサとして、前記仮想平面を挟む2つのセンサを用い、前記角度が所定範囲にある場合、前記角度が所定範囲の一方の閾値を超えた場合、および、前記角度が所定の範囲の他方の閾値を超えた場合のいずれであるかを検知させ、それに応じて、前記回転軸を往復動させるようにして、前記角度がいずれかの閾値を超えた場合でも、所定範囲内に戻るように制御する。
【0012】
なお、前記回転軸は、繰出しモータの回転軸に相当する。また、該回転軸を含む繰出しモータを往復動させる手段としては、該繰出しモータを載置するベース板と、該ベース板に係合する台形ネジと、該台形ネジを正逆回転可能なモータとから構成したものを採用できる。該正逆回転可能モータは前記制御手段により制御され、台形ネジを回転させることで、前記ベース板を前記回転軸の軸方向に往復動させる。
【0013】
また、前記回転軸に取り付けられるボビンは、通常は製造工程で用いられる長尺巻き用ボビンであるが、その他のボビンからの巻替えにも本発明は適用可能である。
【0014】
本発明は、基本的には、ボビンから繰り出された糸状金属の該ボビンと前記案内ローラのうち最初のローラとの間の状態を制御するものである。
【発明の効果】
【0015】
本発明の糸状金属の繰出し装置は、安価で簡易に実現でき、長尺巻き用ボビンに巻かれた糸状金属を、円滑に、かつ、糸状金属への悪影響を生じさせることなく、繰り出すことが可能であり、生産性を悪化させることがないという顕著な効果を奏する。
【図面の簡単な説明】
【0016】
【図1】本発明の糸状金属の繰出し装置の一実施例を示す斜視図である。
【発明を実施するための形態】
【0017】
本発明について、図面を参照して詳細に説明する。図1に、本発明の糸状金属の繰出し装置を含む巻替え装置全体の一実施例を斜視図で示す。ただし、本発明は、かかる実施例により具体的に示される構造に限られることはない。
【0018】
巻替え装置全体は、繰出し装置(1)、巻取り装置(2)、および図示しない制御手段からなる。繰出し装置(1)には、製造工程内で使用される長尺巻き用ボビン(16)が、巻取り装置(2)には、出荷用ボビン(6)がそれぞれ取り付けられ、糸状金属(7)は、長尺巻き用ボビン(16)から送り出され、出荷用ボビン(6)に定尺に揃えて巻き替えられる。糸状金属(7)は、直径0.1mmから直径1.0mm程度であり、たとえば糸半田、金合金接合材、アルミニウム合金接合材などがあげられる。
【0019】
繰出し装置(1)は、基台(19)と、基台(19)の上に固定手段を介して載置される正逆回転可能モータ(4)と、正逆回転可能モータ(4)の回転軸に固定される台形ネジ(5)と、台形ネジ(5)と係合し、その回転により正逆回転可能モータ(4)の回転軸の軸方向に往復動可能なベース板(18)とを備える。
【0020】
ベース板(18)の上には、正逆回転可能モータ(4)の回転軸の軸方向と同じ方向に回転軸(17)が伸長する繰出しモータ(3)が固定される。従って、正逆回転可能モータ(4)の作動により、繰出しモータ(3)はベース板(18)の動きに伴って、軸方向に往復動するようになっている。長尺巻き用ボビン(16)は、繰出しモータ(3)の回転軸(17)に取外し可能に嵌合固定される。
【0021】
また、繰出し装置(1)は、取り付けられた長尺巻き用ボビン(16)の下方において基台(19)に取り付けられる複数の案内ローラ(8,9,10)を備える。長尺巻き用ボビン(16)から繰り出された糸状金属(7)は、最初の案内ローラ(8)、中間の案内ローラ(9)、および、最後の案内ローラ(10)と順に案内されて、巻取り装置(2)に送り出される。
【0022】
少なくとも最初の案内ローラ(8)は、その回転軸が繰出しモータ(3)の回転軸(17)と平行となるように、かつ、回転軸(17)に取り付けられた長尺巻き用ボビン(16)の軸方向中央部から繰り出された糸状金属(7)がストレートにその軌道に進入するように、配置される。図示の実施例では、このような場合、案内ローラ(8)の回転軸および繰出しモータ(3)の回転軸(17)の軸方向に対して側面側から見ると、糸状金属(7)は、長尺巻き用ボビン(16)から最初の案内ローラ(8)の軌道まで鉛直方向に送られることになる。
【0023】
なお、図示の実施例では、長尺巻き用ボビン(16)から下方に糸状金属(7)が繰り出されるが、繰出し方向は、繰出し装置(1)と巻取り装置(2)の位置関係などにより決定されるため、任意である。
【0024】
一方、巻取り装置(2)は、基台(20)と、基台(20)に固定されたモータ(14)と、基台(20)に固定された回転軸(13)に対して揺動可能に取り付けられた張力調整ガイド(12)とを備える。出荷用ボビン(6)はモータ(14)の回転軸(15)に取外し可能に嵌合固定される。張力調整ガイド(12)は、出荷用ボビン(6)の手前で、繰出し装置(1)の最後の案内ローラ(10)の後段側に配置され、バネにより糸状金属(7)に張力を付与すると共に、回転軸(13)に対する張力調整ガイド(12)の傾きの変化に応じて、図示しない制御手段により、繰出し装置(1)の繰出しモータ(3)の回転速度を制御し、糸状金属(7)に過大な張力がかからないように、また、糸状金属(7)がたるまないようにしている。
【0025】
本発明では、長尺巻き用ボビン(16)からの糸状金属(7)の繰出し位置が、長尺巻き用ボビン(16)の中央部から軸方向左右に移動することに応じて、正逆回転可能モータ(4)の作動により、回転軸(17)を軸方向に往復動させることにより、長尺巻き用ボビン(16)と最初の案内ローラ(8)との間で、糸状金属(7)が最初の案内ローラ(8)の軌道を含む仮想平面(図示の例では、鉛直方向を示す仮想線を含み、最終案内ローラ(8)の回転軸に垂直な仮想平面)に対してなす角度が常に所定範囲内にあるように制御する。なお、所定範囲とは、左右方向に±15°、好ましくは±8°、さらに好ましくは±3°である。少なくとも左右方向にそれぞれ15°を超えた場合、繰出し時における糸状金属(7)同士の接触や、糸状金属(7)の伸びという問題が生じうる。
【0026】
回転軸(17)を軸方向に往復動させる手段としての正逆回転可能モータ(4)を制御するためには、センサ、スキャン、その他の接触式もしくは非接触式の糸状金属(7)の位置ないしはその繰出し位置を検知する手段と、該検知手段による検知に基づいて正逆回転可能モータ(4)を制御する手段とを、用いることができる。
【0027】
図示の実施例では、この検知手段として、長尺巻き用のボビン(16)と最初の案内ローラ(8)との間で、最初の案内ローラ(8)の近傍に、2つの非接触式のセンサ(11a,11b)を並べて設置している。これらのセンサ(11a,11b)は、通過する糸状金属(7)を挟むように、その両側に配置される。センサ(11a,11b)として、たとえば、光センサ(竹中電子工業社製、ファイバセンサ)を使用することができる。
【0028】
センサ(11a,11b)は、糸状金属(7)が鉛直方向となす角度(α)がたとえば+2°以上の時(図1において右方向)に、センサ(11a)だけが糸状金属(7)を検知し、−2°から+2°の時に、センサ(11a,11b)の両方が糸状金属(7)を検知し、−2°以下の時(図1において左方向)に、センサ(11b)だけが糸状金属(7)を検知するように、検知能力と位置とが調整されて設置されている。検知を行う角度は、任意に調整される。あるいは、角度(α)がたとえば−2°から+2°の時には、センサ(11a,11b)の両方とも検知しないように、調整してもよい。
【0029】
なお、制御手段には、センサ(11a、11b)の検知により、正逆回転可能モータ(4)を駆動することが可能であれば、任意の公知の回路を採用できる。
【0030】
使用時には、繰出しモータ(3)の回転軸(17)に、長尺巻き用のボビン(16)を取り付けて、繰り出される糸状金属(7)を、最初の案内ローラ(8)、中間の案内ローラ(9)、および、最後の案内ローラ(10)の順に案内して、張力調整ガイド(12)を介して、巻取り装置(2)に取り付けられた出荷用ボビン(6)に巻き取られるように、セットする。
【0031】
繰出しが開始すると、糸状金属(7)が長尺巻き用ボビン(16)から繰り出される位置が、長尺巻き用ボビン(16)上においては、ボビンの左右方向、すなわち方向(A)もしくは方向(B)に移動する。
【0032】
繰出し位置が、たとえば方向(B)に移動するにつれて、角度(α)は次第に大きくなり、センサ(11a,11b)が共に糸状金属(7)を検知していた状態から、角度(α)が所定の角度である+2°より大きくなり、センサ(11b)が糸状金属(7)を検知せずに、センサ(11a)のみが糸状金属(7)を検知する状態となる。
【0033】
この時点で、センサ(11a,11b)からの信号の変化に応じて、図示しない制御手段が、正逆回転可能モータ(4)を駆動させ、台形ネジ(5)を回転させる。これにより、センサ(11b)が糸状金属(7)を再び検知するまで、ベース板(18)が方向(A)に移動する。このように制御することにより、角度(α)を常に所定範囲(上記の実施例では、±5°)内に抑えることが可能となる。
【0034】
その結果、糸状金属(7)がボビン(16)から繰り出される際に、糸状金属(7)同士が接触し、糸状金属(7)の表面に傷が発生したり、糸状金属(7)に振動が発生したり、糸状金属(7)が最初の案内ローラ(8)から脱落したり、繰出し時の糸状金属同士の引っかかりにより過大な張力が発生して糸状金属(7)に伸びが発生するなどのような不具合が抑制される。
【0035】
また、糸状金属(7)が長尺巻き用のボビン(16)から巻き出される位置と、最初の案内ローラ(8)との間の距離を、従来の約350mmから、約100mmにまで大幅に短縮することが可能になり、さらに、繰出し速度を45m/分から100m/分にすることができる。このように、繰出し速度の向上により、生産性を高く維持することが可能となる。
【0036】
図示した例においては、長尺巻き用ボビン(16)を、繰出し方向に回転させる積極的繰出し方式を示したが、糸状金属(7)の性質によっては、摩擦力または電磁力などを用いて、長尺巻き用ボビン(16)の回転力に抵抗を加えた状態で、巻取り装置(2)側の駆動力のみで繰出しを行なう消極的繰出し方式にも適応することが可能である。
【符号の説明】
【0037】
1 繰出し装置
2 巻取り装置
3 繰出しモータ
4 正逆回転可能モータ
5 台形ネジ
6 顧客へ出荷用のボビン
7 糸状金属
8 最初の案内ローラ
9 中間の案内ローラ
10 最後の案内ローラ
11a、11b センサ
12 張力調整ガイド
13 張力調整ガイドの揺動回転軸
14 巻取り用モータ
15 巻取り用モータの回転軸
16 長尺巻き用ボビン
17 繰出しモータの回転軸
18 ベース板
19 繰出し装置の基台
20 巻取り装置の基台
α ボビンと最初の案内ローラとの間にある糸状金属が鉛直方向に対してなす角度
【特許請求の範囲】
【請求項1】
糸状金属が巻かれたボビンを取外し可能に嵌合固定可能な回転軸と、該回転軸から所定距離だけ離れて配置され、かつ、前記回転軸に固定された前記ボビンから繰り出された糸状金属が通過する軌道を有する案内ローラとを備え、前記回転軸は、軸方向に往復動可能であり、かつ、前記ボビンと前記案内ローラとの間にある糸状金属が前記軌道を含む仮想平面に対してなす角度が、所定範囲となるように前記往復動が制御される、糸状金属の繰出し装置。
【請求項2】
前記角度を検知する手段をさらに備える、請求項1に記載の糸状金属の繰出し装置。
【請求項3】
前記角度を検知する手段が、非接触式センサである、請求項2に記載の糸状金属の繰出し装置。
【請求項4】
前記センサは、前記仮想平面を挟む2つのセンサからなり、前記角度が所定範囲にある場合、前記角度が所定範囲の一方の閾値を超えた場合、および、前記角度が所定の範囲の他方の閾値を超えた場合のいずれであるかを検知することが可能である、請求項3に記載の糸状金属の繰出し装置。
【請求項5】
糸状金属が巻かれたボビンを取外し可能に嵌合固定可能な回転軸を有する繰出しモータと、該繰出しモータを前記回転軸の軸方向に往復動させる手段と、前記回転軸から所定距離だけ離れて配置され、かつ、前記回転軸に固定された前記ボビンから繰り出された糸状金属が通過する軌道を有する少なくとも1つの案内ローラと、前記ボビンと前記案内ローラのうち最初のローラとの間にある糸状金属が前記軌道を含む仮想平面に対してなす角度を検知するセンサと、該センサの検知に基づいて、前記角度が所定範囲内となるように前記往復動させる手段を制御する制御手段とを備える、糸状金属の繰出し装置。
【請求項1】
糸状金属が巻かれたボビンを取外し可能に嵌合固定可能な回転軸と、該回転軸から所定距離だけ離れて配置され、かつ、前記回転軸に固定された前記ボビンから繰り出された糸状金属が通過する軌道を有する案内ローラとを備え、前記回転軸は、軸方向に往復動可能であり、かつ、前記ボビンと前記案内ローラとの間にある糸状金属が前記軌道を含む仮想平面に対してなす角度が、所定範囲となるように前記往復動が制御される、糸状金属の繰出し装置。
【請求項2】
前記角度を検知する手段をさらに備える、請求項1に記載の糸状金属の繰出し装置。
【請求項3】
前記角度を検知する手段が、非接触式センサである、請求項2に記載の糸状金属の繰出し装置。
【請求項4】
前記センサは、前記仮想平面を挟む2つのセンサからなり、前記角度が所定範囲にある場合、前記角度が所定範囲の一方の閾値を超えた場合、および、前記角度が所定の範囲の他方の閾値を超えた場合のいずれであるかを検知することが可能である、請求項3に記載の糸状金属の繰出し装置。
【請求項5】
糸状金属が巻かれたボビンを取外し可能に嵌合固定可能な回転軸を有する繰出しモータと、該繰出しモータを前記回転軸の軸方向に往復動させる手段と、前記回転軸から所定距離だけ離れて配置され、かつ、前記回転軸に固定された前記ボビンから繰り出された糸状金属が通過する軌道を有する少なくとも1つの案内ローラと、前記ボビンと前記案内ローラのうち最初のローラとの間にある糸状金属が前記軌道を含む仮想平面に対してなす角度を検知するセンサと、該センサの検知に基づいて、前記角度が所定範囲内となるように前記往復動させる手段を制御する制御手段とを備える、糸状金属の繰出し装置。
【図1】


【公開番号】特開2010−189185(P2010−189185A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−38182(P2009−38182)
【出願日】平成21年2月20日(2009.2.20)
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月20日(2009.2.20)
【出願人】(000183303)住友金属鉱山株式会社 (2,015)
【Fターム(参考)】
[ Back to top ]