
紙幣識別装置
【課題】紙幣の滑りや傾きによる識別精度の低下を防止して受入率を向上させた紙幣識別装置を提供する。
【解決手段】紙幣識別装置1は、紙幣搬送ベルト44上のマーカ100を照射した反射光から紙幣搬送ベルト44の移動量データを検出するとともに、紙幣を照射した反射光から紙幣の移動量データを検出する2次元移動量検出センサ50と、紙幣搬送ベルト44の移動量データに基づいて、2次元移動量検出センサ50の単位出力当たりの基準移動量を算出し、算出した基準移動量に基づいて、紙幣上の特徴データを読み取る測定位置を取得するキャリブレーション処理部111Aと、紙幣から測定位置における特徴データを検出する紙幣識別センサ71と、紙幣上の所定位置にある特徴データを基準データとして記憶するメモリ120と、測定位置における特徴データと、メモリ120に記憶した基準データとを比較して紙幣の真偽を識別する識別部112とを有する。
【解決手段】紙幣識別装置1は、紙幣搬送ベルト44上のマーカ100を照射した反射光から紙幣搬送ベルト44の移動量データを検出するとともに、紙幣を照射した反射光から紙幣の移動量データを検出する2次元移動量検出センサ50と、紙幣搬送ベルト44の移動量データに基づいて、2次元移動量検出センサ50の単位出力当たりの基準移動量を算出し、算出した基準移動量に基づいて、紙幣上の特徴データを読み取る測定位置を取得するキャリブレーション処理部111Aと、紙幣から測定位置における特徴データを検出する紙幣識別センサ71と、紙幣上の所定位置にある特徴データを基準データとして記憶するメモリ120と、測定位置における特徴データと、メモリ120に記憶した基準データとを比較して紙幣の真偽を識別する識別部112とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紙幣識別装置に関する。
【背景技術】
【0002】
従来、自動販売機や両替機などには紙幣識別装置が搭載されている。紙幣識別装置は、紙幣挿入口から挿入された紙幣を、搬送ベルト又は搬送ローラで搬送して装置内に取り込み、紙幣搬送経路に設けられた光センサや磁気センサ等の識別センサによって、紙幣の真偽と種類を識別するものである。
【0003】
紙幣識別装置の搬送ベルト又は搬送ローラを駆動させる駆動モータの軸には、パルスエンコーダが取り付けられており、パルスエンコーダから出力されるパルスに同期して識別センサにより紙幣の特徴データを検出し、これをメモリに記憶されている特徴データと比較することで、紙幣の真偽と種類を識別するとともに、紙幣が特定のセンサの位置を通過するまでのパルスエンコーダのパルス数をカウントして紙幣の長さを判定するようになされている。
【0004】
紙幣識別装置のメモリには、識別センサにより検出された特徴データとの比較に用いられる基準データ(真正な紙幣の特徴データを抽出したもの)が予め記憶されている。挿入口に挿入された紙幣が上記識別により真券ではないと判定された時、駆動モータを逆方向に回転させて、その紙幣を返却する動作が行われる。
【0005】
このような紙幣識別装置において、搬送ベルト、搬送ローラ等の、紙幣が接触する部品の汚れ、あるいは、濡れた紙幣、折れた紙幣、こしが無いぼろぼろの紙幣が挿入されることが原因となって、搬送中の紙幣に傾き(スキュー)や滑りが発生することがあった。
【0006】
紙幣の搬送中にスキューや滑りが発生した場合、紙幣が詰まってしまい、返却動作を行っても紙幣を返却出来ずに紙幣識別装置が利用出来なくなってしまう。また、パルスエンコーダのパルスに同期して識別処理を行うようになされている為、滑りが発生すると、識別センサによる検出位置(識別ポイント)がずれて識別不良が発生することになる。
【0007】
特許文献1には、これらの問題を解決するために、自動販売機等に搭載される紙幣識別装置において、押圧ローラに取り付けられたパルスエンコーダと、モータ軸に取り付けられたパルスエンコーダにより紙幣の滑りに対応した識別を行う技術が開示されている。つまり、両方のパルスエンコーダから発生されるパルス信号の幅に差異が生じた場合、紙幣の滑りが発生したものと判定し、押圧ローラ側のパルスエンコーダの出力信号に同期して紙幣の特徴データを検出している。
【0008】
また、特許文献2には、識別センサから時系列に出力される信号を、紙幣の搬送距離で正規化して判定する技術が記載されている。
【0009】
一方、特許文献3および特許文献4には、複写機等の紙葉類搬送装置において、光学式マウスセンサ等で用いられているものと同様の2次元移動量検出センサを用いて紙葉類のスキューや滑りをリアルタイムで検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2000−348233号公報
【特許文献2】特開平10−255098号公報
【特許文献3】特開2005−41623号公報
【特許文献4】特開2005−206307号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかし、特許文献1に示すように、識別センサによる特徴データの検出を押圧ローラ側のパルスエンコーダの出力信号に同期させても、押圧ローラ側で紙幣の滑りが発生した場合、識別ポイントのずれの発生を防止できず、識別精度が悪くなってしまう。
【0012】
特許文献2に開示されている技術においては、識別センサの出力を紙幣の搬送距離で正規化しているため、部分的な紙幣の滑りが発生した場合、全ての識別ポイントがずれてしまい、識別精度の向上に限界がある。
【0013】
一方、特許文献2および特許文献3に開示されている技術では、2次元移動量検出センサ自体に誤差(バラつき)がある為、紙葉類のスキューや滑りを精度良く検出することができなかった。
【0014】
ここで、2次元移動量検出センサの誤差には、駆動角度の誤差と距離測定の誤差とがある。2次元移動量検出センサの駆動角度の誤差は、2次元移動量検出センサに設けられているCCD(Charge Coupled Device Image Sensor)に対する、測定物の駆動角度の誤差である。駆動角度の誤差は、2次元移動量検出センサ、紙葉類搬送装置の組み立て誤差等によって生じる。
【0015】
また、2次元移動量検出センサの距離測定の誤差は、レンズによる光学像をCCDで読み取り、DSP(Digital Signal Processor)で2方向の移動距離を検出する2次元移動量検出センサの原理により、対象物、レンズ、CCDの位置関係により光学像の大きさが変わり、1ドット当りの距離に違いが出ることをいう。距離測定の誤差も、2次元移動量検出センサ、紙葉類搬送装置の組み立て誤差等によって生じる。
【0016】
ところで、上述した技術から、自動販売機等に搭載される紙幣識別装置に2次元移動量検出センサを用いることで、紙幣の搬送中のスキューや滑りを検出することができ、これにより、紙幣の真偽と種類を精度よく識別することが可能になるものと考えられる。
【0017】
しかし、自動販売機等に搭載される紙幣識別装置においては、紙幣の搬送駆動源として直流モータが利用されており、紙幣の搬送速度の制御が行われていない。また、自動販売機に搭載される紙幣識別装置は、使用される環境温度の範囲が−10〜60℃と一般的な事務機器と比較して広い装置である為に、搬送速度が装置周辺の温度によって多きく変動する。さらに、紙幣識別装置の個体差によって紙幣の搬送速度が装置毎に異なる。
【0018】
従って、仮に、上述したような2次元移動量検出センサの個体差(誤差)を出荷時に補正しても、紙幣識別装置毎の搬送速度が異なることや、出荷後の紙幣識別装置の紙幣の搬送速度が、温度等によって出荷時の速度と異なることから、出荷時に個体差を補正した2次元移動量検出センサの出力と、実稼働時の2次元移動量検出センサの出力とを比較してもスキューや滑りを高精度に検出することが出来ないという問題があった。
【0019】
例えば、出荷時に、常温25℃の環境下で使用されることを想定して2次元移動量検出センサの個体差を補正したとしても、低温環境下では紙幣の搬送速度が遅くなってしまうことから、滑りが発生していると誤って判定されてしまう。また、温度以外にも、搬送ローラや搬送ベルトの摩耗が要因となって紙幣の搬送速度が出荷時より低下し、誤って判定されてしまう。
【0020】
本発明は、このような事情に鑑み、紙幣の滑りや傾きによる識別精度の低下を防止して受入率を向上させた紙幣識別装置を提供することを目的とする。
【課題を解決するための手段】
【0021】
前記課題を解決するために、本発明は、紙幣の真偽を識別する紙幣識別装置であって、
挿入口から挿入された紙幣を搬送する搬送手段と、前記搬送手段に設けられた測定指標と、前記搬送手段上の測定指標を照射した反射光から前記搬送手段の移動量データを検出するとともに、前記搬送手段が前記紙幣を搬送しているときに前記紙幣を照射した反射光から前記紙幣の移動量データを検出する移動量検出手段と、前記移動量検出手段が検出した搬送手段の移動量データに基づいて、前記移動量検出手段の単位出力当たりの基準移動量を算出する基準移動量算出手段と、前記基準移動量算出手段により算出した基準移動量に基づいて、前記紙幣上の特徴データを読み取る測定位置を取得する測定位置取得手段と、前記紙幣から前記測定位置における特徴データを検出する特徴データ検出手段と、前記紙幣上の所定位置にある特徴データを基準データとして記憶する基準データ記憶手段と、前記測定位置における特徴データと、前記基準データ記憶手段に記憶した基準データとを比較して前記紙幣の真偽を識別する識別手段と、を備える。
【0022】
上記発明において、前記測定指標は、紙幣搬送ベルトまたは紙幣搬送ローラに所定間隔で複数設けられた指標であることが好ましい。
【0023】
上記発明において、前記移動量検出手段は、前記挿入口から挿入された紙幣が前記移動量検出手段の検出位置に達するまでの間に前記測定指標の移動量データを検出することを特徴とする。
【発明の効果】
【0024】
本発明によれば、紙幣識別センサによる特徴データの検出が2次元移動量検出センサの出力に同期して行われるので、紙幣の滑りが生じても、識別ポイントのずれが生じなくなり、識別精度の低下を防止することができ、受入率の向上に役立つ。
【図面の簡単な説明】
【0025】
【図1】本発明に係る紙幣識別装置の要部断面図である。
【図2】2次元移動量検出センサの構成を示す図である。
【図3】紙幣識別装置の機構を示す概略側面図である。
【図4】図3の上面図である。
【図5】紙幣識別装置の制御機能を示すブロック図である。
【図6】紙幣識別センサのデータ読取タイミングを説明する図である。
【図7】紙幣識別装置の動作を説明するフローチャートである。
【図8】スキュー発生時のデータ処理方法を説明する図である。
【図9】図4の変形例を示す図である。
【図10】図9の変形例を示す図である。
【図11】図9の側面図である。
【図12】図10の変形例を示す図である。
【発明を実施するための形態】
【0026】
<紙幣識別装置の構成の概略>
初めに、図1を参照しながら本発明に係る紙幣識別装置の概略構成を説明する。
図1は本発明に係る紙幣識別装置の要部断面図である。
【0027】
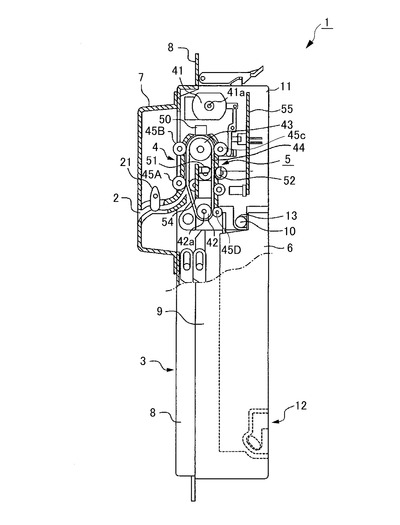
図1に示すように、この紙幣識別装置1は、例えば自動販売機に搭載されるもので、紙幣挿入口2を備えた筐体である装置本体3と、装置本体3内に設けられ、紙幣挿入口2に挿入された紙幣を装置本体3内の紙幣搬送通路に沿って搬送する紙幣搬送手段4と、紙幣搬送手段4により搬送された紙幣の真偽と金種を識別する紙幣識別手段5と、紙幣識別手段5により真券と識別された紙幣を収容するスタッカ6とから構成される。
【0028】
装置本体3は、紙幣挿入口2が形成され、図示しない自動販売機の正面を構成する扉の一部から露出するように配設されるフロントマスク7と、フロントマスク7を正面に装着したフロントプレート8と、フロントプレート8に固着された矩形状の筐体9とから構成される。紙幣挿入口2には、紙幣の挿入を検出する入口センサ21が設けられている。入口センサ21は、反射型の光センサであるが透過型の光センサや直接紙幣に接触して受入れを検知するセンサであってもよい。
【0029】
紙幣搬送手段4および紙幣識別手段5は、ユニットボックス11内に設けられている。スタッカ6は、筐体9の下方に軸受手段12を介し、回動自在および着脱自在に支承されている。
【0030】
紙幣搬送手段4は、ユニットボックス11内の上部に設けられたモータ41と、モータ41の回転を無端の紙幣搬送ベルト44に伝達する駆動プーリ42と、駆動プーリ42との間で紙幣搬送ベルト44を張設する従動プーリ43と、紙幣搬送ベルト44の周面に所定の間隔で設けられた従動ローラ45A乃至45Dとを備えている。
【0031】
なお、駆動プーリ42を支承する軸42aとモータ41の駆動軸41aとの間には、図示しない歯車列が設けられ、その歯車列が動力伝達手段として機能する。図示せぬ制御部からの駆動信号に基づいてモータ41が駆動して駆動軸41aが一方向へ回転すると、その歯車列を介して駆動プーリ42の軸42aが一方向へ回転し、紙幣搬送ベルト44が一方向へ回転する。
【0032】
従動ローラ45A乃至45Dは紙幣搬送ベルト44の表面に圧接するように設けられている。挿入された紙幣は、紙幣搬送ベルト44が回転することによって、従動ローラ45A乃至45Dによって紙幣搬送ベルト44との間に挟持された状態で、紙幣搬送ベルト44の回転方向に搬送される。
【0033】
紙幣識別手段5は、通過する紙幣の特定位置の濃淡を特徴データとして検出する複数の発光素子51および複数の受光素子52から構成される。複数の発光素子51は、ユニットボックス11内に収容されたプリント配線基板54に搭載され、複数の受光素子52はプリント配線基板55に搭載されている。
【0034】
また、紙幣搬送ベルト44に対して紙幣搬送通路を挟んで対向する位置には、2次元移動量検出センサ50が設けられている。この2次元移動量検出センサ50は、パーソナルコンピュータ等のユーザインターフェースとして利用される光学式マウスに搭載される2次元移動量検出センサと同様の機能を有するセンサであって、被測定物の移動量と移動方向を示す情報としてのX方向とY方向の移動量の情報や受光量を出力するセンサである。
【0035】
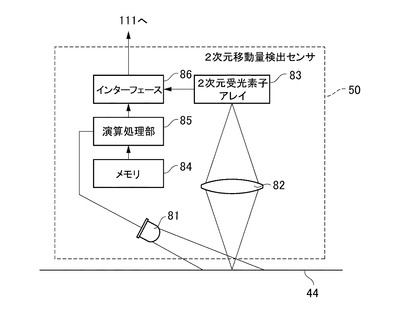
図2は2次元移動量検出センサ50の構成を示す図である。2次元移動量検出センサ50は、光源81と、2次元受光素子アレイ83と、光源81から照射されて被測定物に反射した光を2次元受光素子アレイ83に集束させるためのレンズ82を備える。2次元受光素子アレイ83は、相補型金属酸化膜半導体(CMOS)からなる。尚、2次元受光素子アレイ83は、電荷結合素子(CCD)のような他の撮像デバイスを使用することも可能である。
【0036】
演算処理部85は、2次元受光素子アレイ83からの出力に基づいて、対象物のX方向とY方向の移動量の演算を行い、演算により求めたX方向とY方向の移動量を表す情報と受光量を表す情報を、インターフェース86を介して外部に出力する。なお、2次元移動量検出センサ50による移動量の検出の原理については、特開2005−41623号公報等に記載されている通り公知の技術であるから詳細な説明は省略する。
【0037】
紙幣処理装置1は、このような2次元移動量検出センサ50を搭載することで、紙幣搬送ベルト44と搬送される紙幣の其々の移動量(X方向の移動量とY方向の移動量)と紙幣搬送ベルト44と搬送される紙幣の其々から反射した受光量を取得して、搬送中の紙幣の傾きや滑りを検出できる。
【0038】
2次元移動量検出センサ50は、従動プーリ43に架けられた紙幣搬送ベルト44の近傍に配置されている。このように従動プーリ44や駆動プーリ42に近い位置に2次元移動量検出センサ50を配置した方が、2次元移動量検出センサ50と紙幣搬送ベルト44との間隔が比較的一定となって、紙幣や紙幣搬送ベルト44の移動量(X方向の移動量とY方向の移動量)が高精度に検出できる。
【0039】
<紙幣搬送機構の構成>
次に、図3と図4を参照しながら本実施形態の紙幣識別装置1に搭載される紙幣搬送手段4、紙幣識別手段5および2次元移動量検出センサ50について詳細に説明する。
図3は紙幣搬送手段4の機構を示す概略側面図、図4は図3の上面図である。図3と図4に示す構成のうち、図1に示す構成と同じ構成には同じ符号を付してあり、重複する説明については適宜省略する。
【0040】
図3の白抜き矢印#1に示すようにして紙幣挿入口2に挿入された紙幣は入口センサ21により検出され、モータ41の駆動によって駆動プーリ42を介して駆動される紙幣搬送ベルト44によって、装置内部へと搬送される。
【0041】
装置内部へと搬送される紙幣は、従動ローラ45Aと従動ローラ45Bの位置を通過し、白抜き矢印#2の先に示す2次元移動量検出センサ50の検出位置(2次元移動量検出センサ50の位置)に到達する。さらに、従動ローラ45Cの位置を通過し、発光素子51と受光素子52からなる紙幣識別センサ71が設けられた位置を通過する。紙幣が紙幣識別センサ71を通過すると、紙幣処理装置1は、紙幣識別センサ71の出力に基づいて紙幣の真偽を判別する。ここで紙幣が真正であると判断されると、紙幣は従動ローラ45Dの位置を通過してスタッカ6に収容される。
【0042】
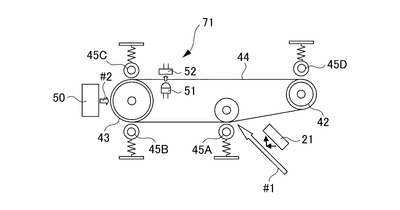
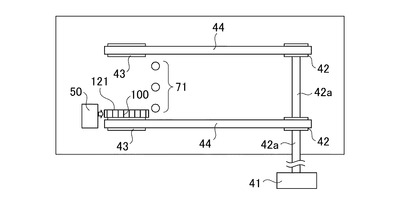
図4に示すように、紙幣識別装置1には、図3に示す駆動プーリ42、従動プーリ43、紙幣搬送ベルト44と同じ構成が並行に2つ設けられており、紙幣搬送ベルト44による紙幣の搬送方向と直交する方向に、紙幣識別センサ71が複数並べて設けられている。
上側の駆動プーリ42と下側の駆動プーリ42は軸42aによって接続され、軸42aには、動力伝達手段となる歯車列などを介してモータ41が接続される。上側の従動プーリ43と下側の従動プーリは図示しない軸によって接続されている。
2次元移動量検出センサ50は、下側の紙幣搬送ベルト44の移動量を検出すべくその付近に設けられ、下側の紙幣搬送ベルト44の紙幣当節接面には、測定指標としてのマーカ100が所定間隔で複数設けられている。そして、紙幣搬送ベルト44によって搬送されている紙幣が、2次元移動量検出センサ50の検出位置に達するまでの間に、2次元移動量検出センサ50によって紙幣搬送ベルト44上のマーカ100を照射した反射光から紙幣搬送ベルト44の移動量データが検出される。
なお、実施例において搬送ベルト44は黒色、マーカ100は白色である。紙幣識別装置1は、2次元移動量検出センサ50が取得する受光量の変化に基づいて搬送ベルト44上のマーカ100を検出する。
【0043】
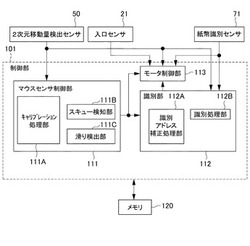
次に、紙幣識別装置1の制御部(CPU101)の機能構成について詳細に説明する。図5は制御部101の機能構成を示すブロック図である。
【0044】
図5に示すように、制御部として機能するCPU101は、予めメモリ120に記憶された所定のプログラムを実行することによって、マウスセンサ制御部111、識別部112、およびモータ制御部113が実現される。
2次元移動量検出センサ50は、紙幣挿入口2から挿入され、紙幣搬送ベルト44によって搬送されている紙幣が、2次元移動量検出センサ50の検出位置に達するまでの間は、紙幣搬送ベルト44上のマーカ100を照射した反射光から紙幣搬送ベルト44の移動量データを検出する。2次元移動量検出センサ50は、紙幣が2次元移動量検出センサ50の検出位置を通過後は、紙幣の移動量データを検出する。
【0045】
マウスセンサ制御部111は、2次元移動量検出センサ50により取得した情報に基づいて紙幣の滑りや傾きを判別するものである。識別部112は、紙幣識別センサ71からの出力信号およびマウスセンサ制御部111からの情報に基づいて紙幣の真偽と金種を判別するものである。モータ制御部113は、紙幣の受入方向への搬送、返却方向への搬送および停止の制御をするものである。メモリ120には、紙幣上の所定位置にある特徴データが基準データとして記憶されている。
マウスセンサ制御部111は、キャリブレーション処理部111A、スキュー検出部111Bおよび滑り検出部111Cから構成され、識別部112は、識別アドレス補正処理部112Aおよび識別処理部112Bから構成される。
【0046】
キャリブレーション処理部111Aは、入口センサの21の出力信号に基づいて紙幣が挿入されたことを検出する毎に、2次元移動量検出センサ50により取得されたX方向とY方向の移動量に基づいて、紙幣が無い状態(言い換えると2次元移動量検出センサ61にまだ搬送されている紙幣が到達しない状態)での紙幣搬送ベルト44の移動量と移動方向を表す基準データを求め、メモリ120へ記憶する。また、キャリブレーション処理部11Aは、2次元移動量検出センサ50により取得された受光量に基づいて、基準となる受光量を求め、この基準データと基準となる受光量をメモリ120へ記憶する。またキャリブレーション処理部111Aは、挿入された紙幣が2次元移動量検出センサ50の位置に到達したことを受光量の変化に基づいて検出する。キャリブレーション処理部111Aは、紙幣が2次元移動量検出センサ50の位置に到達したことを受光量の変化に基づいて検出した場合、紙幣の移動量と移動方向を表す搬送状態情報を求める。
【0047】
キャリブレーション処理部111Aは、2次元移動量検出センサ50が検出した紙幣搬送ベルト44の移動量データに基づいて、2次元移動量検出センサ50の単位出力当たりの基準移動量を算出する。さらに、キャリブレーション処理部111Aは、算出した基準移動量に基づいて、紙幣上の特徴データを読み取る測定位置を取得する。
【0048】
スキュー検出部111Bは、キャリブレーション処理部111Aが搬送状態情報として求めた紙幣の移動方向と、メモリ120に記憶した基準データの移動方向を表す情報とを比較して紙幣のスキューを検出する。
また、滑り検出部111Cは、キャリブレーション処理部111Aが求めた搬送状態情報として求めた紙幣の移動量と、メモリ120に記憶した基準データの移動量とを比較して紙幣の滑りを検出する。
スキュー検出部111Bにより検出されたスキューの情報と滑り検出部111Cにより検出されたスキューの情報は、識別部112とモータ制御部113に供給される。
【0049】
識別アドレス補正処理部112Aは、スキュー検出部111Bにより求められたスキューに基づいて、紙幣搬送ベルト44により搬送されている紙幣の識別アドレスを補正する。
【0050】
識別処理部112Bは、キャリブレーション処理部111Aにて取得した測定位置における特徴データと、メモリ120に予め記憶されており、識別処理部112に対して予め与えられている紙幣の各位置の基準データとを比較して紙幣の真偽を識別する。
また、識別処理部112Bは、紙幣識別センサ71により検出された、識別アドレス補正後の紙幣の特徴データをマッチングし、紙幣の真偽と種類を識別する。識別処理部112Bにより識別された紙幣の真偽を表す情報はモータ制御部113に出力される。
【0051】
モータ制御部113は、入口センサ21により紙幣の挿入が検出された場合、モータ41の駆動を開始させる。また、モータ制御部113は、スキュー検出部111Bにより検出されたスキューまたは滑り検出部111Cにより検出された滑りが、識別アドレス補正処理部112Aが識別アドレスを補正しきれないほど大きい場合、モータ41を逆回転させて紙幣の返却動作を行う。モータ制御部113は、挿入された紙幣が真券ではないとして識別処理部112Bにより識別された場合も同様に紙幣の返却動作を行わせる。
【0052】
(紙幣搬送前の搬送状態の基準データ取得)
紙幣の挿入が検出されてから2次元移動量検出センサ50の位置に紙幣が到達するまでの所定期間(時間T1)において、2次元移動量検出センサ50の出力するX方向(紙幣の搬送方向)の移動量をX1、Y方向(紙幣の搬送方向と直交する方向)の移動量をY1とすると、基準データの内、方向の基準を表す値である方向基準値α1は下式(1)により求められる。
α1 = ArcTan(Y1/X1) ・・・ (1)
【0053】
また、紙幣の挿入が検出されてから2次元移動量検出センサ50の検出位置に紙幣が到達するまでの所定期間(時間T1)における基準データの移動量基準値V1は下式(2)により求められる。なお、絶対値較正をしてないので移動量基準値V1は相対値である。
V1 = SQRT(X12 + Y12) / T1 ・・・ (2)
【0054】
(紙幣到達以後の搬送状態情報の求め方と紙幣のスキュー、滑り検出)
2次元移動量検出センサ50の位置に紙幣が到達すると、2次元移動量検出センサ50が出力するX方向とY方向の移動量に基づいて、上述した基準データの求め方と同様の方法で紙幣の移動方向情報α1billが下式(3)から求められる。
α1bill= ArcTan(Ybill/Xbill) ・・・ (3)
【0055】
また、2次元移動量検出センサ50が出力するX方向とY方向の移動量に基づいて、上述した基準データの求め方と同様の方法で、紙幣の移動量を示す値であるV2が下式(4)から求められる。
V2= SQRT(Xbill2 + Ybill2) / T2 ・・・ (4)
【0056】
紙幣のスキューと滑りが次の式から求められる。
スキュー = αbill − α1 ・・・ (5)
【0057】
紙幣の滑りは次の式から求められる。
滑り = V2 − V1 ・・・ (6)
【0058】
(2次元移動量検出センサ50の単位出力当たりの紙幣移動量を算出する方法)
キャリブレーション処理部111Aは、入口センサ21が紙幣を検知すると、モータ41を駆動して紙幣が無い状態における、2次元移動量検出センサ50から出力される1ドット(単位出力)当たりの搬送ベルト44の基準移動量を求める。
搬送ベルト44に付けられたマーカ100の間隔をL0とし、L0当たりの紙幣無しでの紙幣搬送方向(X方向)の2次元移動量検出センサ50から出力される、ドット数がX0(ドット)であった場合の1ドット(単位出力)当たりの基準移動量X2(mm)は、下式(7)から求められる。
X2=L0/X0 ・・・ (7)
【0059】
(2次元移動量検出センサ50の出力でサンプリングする方法)
所定のサンプリング間隔L1(mm)を紙幣搬送するのに必要な2次元移動量検出センサ50から出力されるドット数X3は、式(8)から求められる。
X3=L1/X2 ・・・ (8)
ここで、ドット数X3は、紙幣上の特徴データを読み取る測定位置となる。
例えば、搬送ベルト44のマーカ100の間隔L0=10mm間隔であって、0.5mm移動ごとにサンプリングをするとした場合、2次元移動量検出センサ50から出力されるマーカ間の2次元移動量検出センサ50のドット数が、1000ドットの時、
L0=10mm、L1=0.5mm、X0=1000ドットとすると、
・単位出力当たりの基準移動量:X2=10/1000=0.01mm/ドット
・測定位置:X3=0.5/0.01=50ドット
となる。したがって、0.5mm毎にサンプリングを行うためには、2次元移動量検出センサ50の移動量(測定位置)X3=50ドット毎にサンプリングを行う必要がある。
【0060】
次に、紙幣の特徴データのサンプリング方法について説明する。図6は紙幣の特徴データをサンプリングする方法を示す図、(a)は紙幣のサンプリング位置としての識別ポイントを説明する図、(b)はパルスエンコーダの出力に同期させてサンプリングする従来の例を説明する図、(c)はパルスエンコーダの出力に同期させてサンプリングする紙幣処理装置において紙幣に滑りが生じた場合のサンプリング位置のずれを説明する図、(d)は本発明の2次元移動量検出センサ50の出力に同期させてサンプリングを行う方法を示す図である。同図(b)〜(d)中、紙幣識別センサ71の出力波形とサンプリングタイミングを示している。
【0061】
図6(a)に示すように、紙幣Bには識別ポイトAが等間隔で多数配置されている。この識別ポイントAが紙幣識別センサ71のサンプリング点である。従来、同図(b)のように、モータ41に取り付けたパルスエンコーダの出力信号に同期して紙幣識別センサ71の出力信号をサンプリングしていた。
しかし、同図(c)に示すように、紙幣の滑りが生じると、紙幣識別センサ71のサンプリング位置が識別ポイトAから外れ、識別ポイトA上の基準データと実際の測定データとの間に誤差を生じてしまうという問題があった。
【0062】
そこで、本実施形態では、同図(d)のように、2次元移動量検出センサ50の出力に同期させて紙幣識別センサ71の出力信号をサンプリングすることで、紙幣の滑りが生じても、紙幣識別センサ71が識別ポイトA上の特徴データを正確にサンプリングすることができる。したがって、紙幣の滑りによる識別精度の低下を防止することができ、受入率を向上できる。
【0063】
次に、紙幣識別装置1の動作について説明する。図7は、紙幣識別装置の動作を説明するフローチャートである。
図7に示すように、ステップS1において入口センサ21により紙幣の挿入が検出された場合(ステップS1にてYes)、ステップS2において、モータ制御部113はモータ41を制御し、挿入された紙幣の搬送を開始する。
【0064】
ステップS3において、キャリブレーション処理部111Aは、紙幣が2次元移動量検出センサ50の位置に到達する前に2次元移動量検出センサ50により検出された紙幣搬送ベルト44の移動量に基づいて、上式(1)と(2)により基準データを求める。
また、キャリブレーション処理部111Aは基準受光量を取得する。
【0065】
また、キャリブレーション処理部111Aは、2次元移動量検出センサ50が検出した紙幣搬送ベルト44の移動量データに基づいて、式(7)により2次元移動量検出センサ50の単位出力当たりの基準移動量を算出する。さらに、キャリブレーション処理部111Aは、上記算出した基準移動量に基づいて、式(8)により紙幣上の特徴データを読み取る測定位置を取得する。
【0066】
ステップS4において、キャリブレーション処理部111Aは、紙幣が2次元移動量検出センサ50の検出位置に到達したか否かを2次元移動量検出センサ50により検出される受光量の変化に基づいて判定する。紙幣が2次元移動量検出センサ50の検出位置に到達したとステップS4において判定された場合(ステップS4にてYes)、ステップS5において、キャリブレーション処理部111Aは上式(3)と(4)によって紙幣の搬送状態情報をリアルタイムで算出する処理を開始する。
また、紙幣が紙幣識別センサ71に到達すると、上記式(8)により求めた測定位置X3毎に紙幣の特徴データをサンプリングする。
【0067】
ステップS6において、スキュー検出部111Bは、上記ステップS5において取得した紙幣の搬送状態情報と基準データとを比較してスキューを検出したか否かを判定する。
例えば、上式(5)により求められた値が予め定められた閾値と比較され、閾値を超えた場合、スキューを検出したとして判定される(ステップS6にてYes)。
【0068】
ステップS6においてスキューが検出されていない場合(ステップS6にてNo)、ステップS7において、滑り検出部111Cは、滑りを検出したか否かを判定する。例えば、上式(6)により求められた値が閾値と比較され、予め定められた閾値を超えた場合、滑りを検出したとして判定される。
【0069】
ステップS7において滑りが検出されていない場合(ステップS7にてNo)、ステップS8において、紙幣識別センサ71によるサンプリングが終了したか否か、すなわち、紙幣識別センサ71の識別エリアを通過したか否かを判定する。紙幣が紙幣識別センサ71を通過したか否かは、紙幣識別センサ71を構成する受光素子52の受光量の変化に基づいて判定する。ここで、紙幣識別センサ71によるサンプリングが終了したとステップS8において判定された場合、ステップS5に戻り、同様の処理が繰り返される。
【0070】
一方、ステップS6においてスキューが検出された場合(ステップS6にてYes)、またはステップS7において滑りが検出された場合(ステップS7にてYes)、ステップS9において、識別アドレス補正処理部112Aは補正が可能であるか否かを判定する。
【0071】
スキューや滑りが微小であることから補正が可能であるとステップS9において判定した場合(ステップS9にてYes)、ステップS10において、識別アドレス補正処理部112Aは、スキュー検出部111Bにより検出された紙幣のスキュー量に応じて識別アドレスを補正する。
【0072】
一方、ステップS9において補正が不可能であると判定された場合(ステップS9にてNo)、ステップS11において、モータ制御部113がモータ41を制御し、紙幣の搬送を停止し、さらにモータ41を逆回転して紙幣の返却動作を行う。ステップS10において紙幣の返却が行われると、処理を終了する。
【0073】
ステップS8において、紙幣識別センサ71によるサンプリングが終了したと判定された場合(ステップS8にてYes)、ステップS12において識別処理を行い、全ての紙幣の特徴データの取得が終わると、識別処理部112Bは、キャリブレーション処理部111Aにて取得した測定位置における特徴データと、メモリ120に予め記憶されており、識別処理部112に対して予め与えられている紙幣の各位置の基準データとを比較して紙幣の真偽を識別する。
このように、2次元移動量検出センサ50の出力に同期させて紙幣識別センサ71の出力信号をサンプリングしているので、紙幣の滑りが生じても、紙幣識別センサ71が識別ポイトA上の特徴データを正確にサンプリングすることができる。したがって、紙幣の滑りによる識別精度の低下を防止することができ、受入率を向上できる。
【0074】
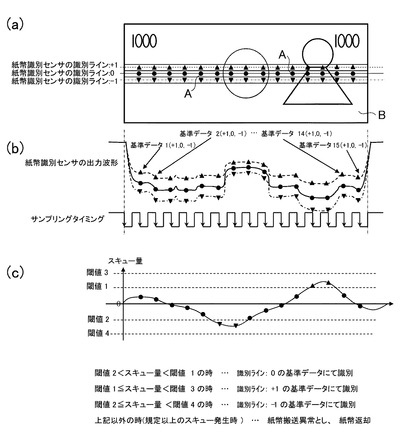
次に、上記ステップS10の識別アドレスの補正方法について説明する。
図8は、スキュー発生時のデータ処理方法を説明する図、(a)は紙幣と紙幣識別センサ71の識別ライン−1〜+1を説明する図、(b)は紙幣識別センサ71の出力波形とサンプリングタイミングを説明する図、(c)はスキュー量を閾値の関係を説明する図である。
ここでは、3つの識別ライン−1〜+1の場合を例にとり、この3つの識別ラインは図4の紙幣識別センサ71の個数に対応している。
【0075】
識別部112Aは、スキュー検知部111Bからのスキュー情報により識別アドレスの補正を行う。具体的には、スキューが発生した場合、規定値以上のスキューの発生箇所については特徴データのばらつきを考慮して判定閾値(紙幣の真偽と種類の判定に用いる閾値)を広げるように補正アドレスの補正を行う。
また、予め、紙幣Bの幅方向中央にある基準識別ライン0の両側に別の識別ライン±1を設定しておき(図8(a)参照)、紙幣識別センサ71を各識別ラインに沿って走査させてその出力をメモリ120に記憶している。(同図(b)参照)。
そして、同図(c)に示すように、スキュー量に応じて判定パターンを選択して識別を行う。具体的には、黒丸印のデータについては基準識別ライン0の基準データで判定し、黒三角印のデータについては識別ライン+1の基準データで判定し、黒逆三角印のデータについては識別ライン−1の基準データで判定することになる。
いずれの方法でも、スキュー量に応じて判定閾値が変化するので、スキュー発生による識別精度の低下を防止することができ、受入率の向上に役立つ。
【0076】
次に、本発明の実施形態の変形例について説明する。図9は、本発明の実施形態の変形例を示す図である。上記本実施形態では、紙幣搬送ベルト44にマーカ100を設けたが、図9に示すように、従動プーリ43のリムを大きくして測定ローラ121を形成し、この測定ローラ121の周面にマーカ100を設けてもよい。測定ローラ121の直径は、従動プーリ43に架けられた紙幣搬送ベルト44の直径と同一であって、測定ローラ121の周速を紙幣搬送ベルト44の移動速度と等しくしてある。2次元移動量検出センサ50は、測定ローラ121と搬送通路を挟んで対向する位置に設けられている。これにより、紙幣搬送ベルト44の張りによる暴れや紙幣搬送ベルト44の摩耗の影響を受けることなく、測定ローラ121の移動量をより高精度に測定することができる。
【0077】
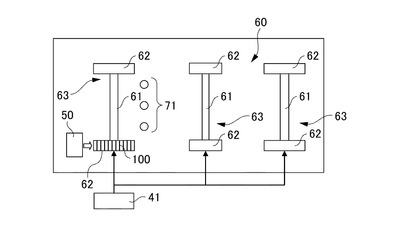
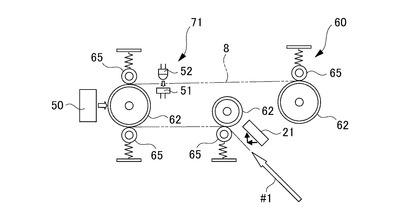
次に、紙幣搬送機構の変形例について説明する。
図10は紙幣搬送機構の概略を示す上面図、図11は図10の側面図である。上記実施形態では、紙幣搬送ベルト44により紙幣を搬送するものについて説明したが、紙幣搬送機構には紙幣搬送ローラにより紙幣を搬送するものがある。
この紙幣搬送機60は、軸61の両端に紙幣搬送ローラ62を設けた紙幣搬送体63を3組備え、これら紙幣搬送体63をモータ64で同一方向に回転させている。各紙幣搬送ローラ62には押圧ローラ65が圧接してあり、これらローラ62,65で紙幣Bを噛み込んで搬送する。
【0078】
図11の矢印#1で示す方向から紙幣Bを挿入すると、入口センサ21が紙幣Bの挿入を検知し、モータ41の駆動によって各紙幣搬送ローラ62が回転する。紙幣Bは紙幣搬送ローラ62と押圧ローラ65に噛み込まれて装置内部に取り込まれ、図中左側の紙幣搬送ローラ62で向きを反転させる際に2次元移動量検出センサ50の検出エリアを通過する。紙幣搬送ローラ62で向きを反転させた紙幣Bは、発光素子51と受光素子52からなる紙幣識別センサ71の検出エリアを通過し、図中右側の紙幣搬送ローラ62と押圧ローラ65に噛み込まれて装置外に排出される。このような紙幣搬送機60では、2次元移動量検出センサ50の検出エリア内にある紙幣搬送ローラ62の周面にマーカ100を設けている。
【0079】
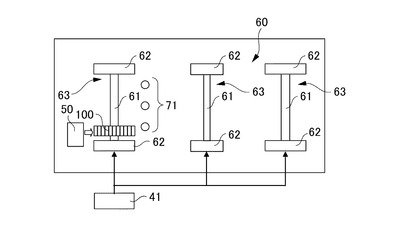
図12は図10の変形例を示している。
搬送機構60の構成自体は上述のものと同一であるが、図中左側の紙幣搬送体63を構成する紙幣搬送ローラ62の内側に測定ローラ66を設けるとともに、この測定ローラ66を2次元移動量検出センサ50の検出エリア内に配置してある。測定ローラ66は直径が紙幣搬送ローラ62と同一であって、その周面にマーカ100を設けている。この搬送機構60では、測定ローラ66は押圧ローラ65が圧接されていないので、摩耗による測定精度の経年劣化の虞がない。
【0080】
以上においては、紙幣搬送ベルト44上、または従動プーリ43のリム上に2次元移動量検出センサ50を設ける場合について説明したが、駆動プーリを駆動する駆動軸上の位置などの他の位置に設けるようにすることも可能である。
【0081】
また、以上においては、基準データの取得を紙幣の挿入が検出される毎に行われる例を基に説明をしたが、紙幣が挿入されていない状態(待機状態)において、数分毎に、基準データの取得を定期的に行なって、紙幣を挿入後は紙幣の搬送状態情報の取得のみを実行する構成とすることも可能である。
【0082】
尚、上述した本実施例に係わる紙幣処理装置はいずれも、2次元移動量検出センサにより紙幣の移動量を直接検出するようにしたから、従来の紙幣処理装置が紙幣の移動量を測定する為に搭載しているパルスエンコーダを備えない構成である。
【0083】
この発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化したり、上記実施の形態に開示されている複数の構成要素を適宜組み合わせたりすることにより種々の発明を形成できる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施の形態に亘る構成要素を適宜組み合わせても良い。
【符号の説明】
【0084】
1 紙幣識別装置
21 入口センサ
42 駆動プーリ
43 従動プーリ
44 紙幣搬送ベルト
45A乃至45D 押圧ローラ
50 2次元移動量検出センサ
62 紙幣搬送ローラ
65 押圧ローラ
71 紙幣識別センサ
100 マーカ
111 搬送状態判別部
111A キャリブレーション処理部
111B スキュー検出部
111C 滑り検出部
112 識別部
112A 識別アドレス補正処理部
112B 識別処理部
113 モータ制御部
120 メモリ
121 測定ローラ
【技術分野】
【0001】
本発明は、紙幣識別装置に関する。
【背景技術】
【0002】
従来、自動販売機や両替機などには紙幣識別装置が搭載されている。紙幣識別装置は、紙幣挿入口から挿入された紙幣を、搬送ベルト又は搬送ローラで搬送して装置内に取り込み、紙幣搬送経路に設けられた光センサや磁気センサ等の識別センサによって、紙幣の真偽と種類を識別するものである。
【0003】
紙幣識別装置の搬送ベルト又は搬送ローラを駆動させる駆動モータの軸には、パルスエンコーダが取り付けられており、パルスエンコーダから出力されるパルスに同期して識別センサにより紙幣の特徴データを検出し、これをメモリに記憶されている特徴データと比較することで、紙幣の真偽と種類を識別するとともに、紙幣が特定のセンサの位置を通過するまでのパルスエンコーダのパルス数をカウントして紙幣の長さを判定するようになされている。
【0004】
紙幣識別装置のメモリには、識別センサにより検出された特徴データとの比較に用いられる基準データ(真正な紙幣の特徴データを抽出したもの)が予め記憶されている。挿入口に挿入された紙幣が上記識別により真券ではないと判定された時、駆動モータを逆方向に回転させて、その紙幣を返却する動作が行われる。
【0005】
このような紙幣識別装置において、搬送ベルト、搬送ローラ等の、紙幣が接触する部品の汚れ、あるいは、濡れた紙幣、折れた紙幣、こしが無いぼろぼろの紙幣が挿入されることが原因となって、搬送中の紙幣に傾き(スキュー)や滑りが発生することがあった。
【0006】
紙幣の搬送中にスキューや滑りが発生した場合、紙幣が詰まってしまい、返却動作を行っても紙幣を返却出来ずに紙幣識別装置が利用出来なくなってしまう。また、パルスエンコーダのパルスに同期して識別処理を行うようになされている為、滑りが発生すると、識別センサによる検出位置(識別ポイント)がずれて識別不良が発生することになる。
【0007】
特許文献1には、これらの問題を解決するために、自動販売機等に搭載される紙幣識別装置において、押圧ローラに取り付けられたパルスエンコーダと、モータ軸に取り付けられたパルスエンコーダにより紙幣の滑りに対応した識別を行う技術が開示されている。つまり、両方のパルスエンコーダから発生されるパルス信号の幅に差異が生じた場合、紙幣の滑りが発生したものと判定し、押圧ローラ側のパルスエンコーダの出力信号に同期して紙幣の特徴データを検出している。
【0008】
また、特許文献2には、識別センサから時系列に出力される信号を、紙幣の搬送距離で正規化して判定する技術が記載されている。
【0009】
一方、特許文献3および特許文献4には、複写機等の紙葉類搬送装置において、光学式マウスセンサ等で用いられているものと同様の2次元移動量検出センサを用いて紙葉類のスキューや滑りをリアルタイムで検出する技術が開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2000−348233号公報
【特許文献2】特開平10−255098号公報
【特許文献3】特開2005−41623号公報
【特許文献4】特開2005−206307号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかし、特許文献1に示すように、識別センサによる特徴データの検出を押圧ローラ側のパルスエンコーダの出力信号に同期させても、押圧ローラ側で紙幣の滑りが発生した場合、識別ポイントのずれの発生を防止できず、識別精度が悪くなってしまう。
【0012】
特許文献2に開示されている技術においては、識別センサの出力を紙幣の搬送距離で正規化しているため、部分的な紙幣の滑りが発生した場合、全ての識別ポイントがずれてしまい、識別精度の向上に限界がある。
【0013】
一方、特許文献2および特許文献3に開示されている技術では、2次元移動量検出センサ自体に誤差(バラつき)がある為、紙葉類のスキューや滑りを精度良く検出することができなかった。
【0014】
ここで、2次元移動量検出センサの誤差には、駆動角度の誤差と距離測定の誤差とがある。2次元移動量検出センサの駆動角度の誤差は、2次元移動量検出センサに設けられているCCD(Charge Coupled Device Image Sensor)に対する、測定物の駆動角度の誤差である。駆動角度の誤差は、2次元移動量検出センサ、紙葉類搬送装置の組み立て誤差等によって生じる。
【0015】
また、2次元移動量検出センサの距離測定の誤差は、レンズによる光学像をCCDで読み取り、DSP(Digital Signal Processor)で2方向の移動距離を検出する2次元移動量検出センサの原理により、対象物、レンズ、CCDの位置関係により光学像の大きさが変わり、1ドット当りの距離に違いが出ることをいう。距離測定の誤差も、2次元移動量検出センサ、紙葉類搬送装置の組み立て誤差等によって生じる。
【0016】
ところで、上述した技術から、自動販売機等に搭載される紙幣識別装置に2次元移動量検出センサを用いることで、紙幣の搬送中のスキューや滑りを検出することができ、これにより、紙幣の真偽と種類を精度よく識別することが可能になるものと考えられる。
【0017】
しかし、自動販売機等に搭載される紙幣識別装置においては、紙幣の搬送駆動源として直流モータが利用されており、紙幣の搬送速度の制御が行われていない。また、自動販売機に搭載される紙幣識別装置は、使用される環境温度の範囲が−10〜60℃と一般的な事務機器と比較して広い装置である為に、搬送速度が装置周辺の温度によって多きく変動する。さらに、紙幣識別装置の個体差によって紙幣の搬送速度が装置毎に異なる。
【0018】
従って、仮に、上述したような2次元移動量検出センサの個体差(誤差)を出荷時に補正しても、紙幣識別装置毎の搬送速度が異なることや、出荷後の紙幣識別装置の紙幣の搬送速度が、温度等によって出荷時の速度と異なることから、出荷時に個体差を補正した2次元移動量検出センサの出力と、実稼働時の2次元移動量検出センサの出力とを比較してもスキューや滑りを高精度に検出することが出来ないという問題があった。
【0019】
例えば、出荷時に、常温25℃の環境下で使用されることを想定して2次元移動量検出センサの個体差を補正したとしても、低温環境下では紙幣の搬送速度が遅くなってしまうことから、滑りが発生していると誤って判定されてしまう。また、温度以外にも、搬送ローラや搬送ベルトの摩耗が要因となって紙幣の搬送速度が出荷時より低下し、誤って判定されてしまう。
【0020】
本発明は、このような事情に鑑み、紙幣の滑りや傾きによる識別精度の低下を防止して受入率を向上させた紙幣識別装置を提供することを目的とする。
【課題を解決するための手段】
【0021】
前記課題を解決するために、本発明は、紙幣の真偽を識別する紙幣識別装置であって、
挿入口から挿入された紙幣を搬送する搬送手段と、前記搬送手段に設けられた測定指標と、前記搬送手段上の測定指標を照射した反射光から前記搬送手段の移動量データを検出するとともに、前記搬送手段が前記紙幣を搬送しているときに前記紙幣を照射した反射光から前記紙幣の移動量データを検出する移動量検出手段と、前記移動量検出手段が検出した搬送手段の移動量データに基づいて、前記移動量検出手段の単位出力当たりの基準移動量を算出する基準移動量算出手段と、前記基準移動量算出手段により算出した基準移動量に基づいて、前記紙幣上の特徴データを読み取る測定位置を取得する測定位置取得手段と、前記紙幣から前記測定位置における特徴データを検出する特徴データ検出手段と、前記紙幣上の所定位置にある特徴データを基準データとして記憶する基準データ記憶手段と、前記測定位置における特徴データと、前記基準データ記憶手段に記憶した基準データとを比較して前記紙幣の真偽を識別する識別手段と、を備える。
【0022】
上記発明において、前記測定指標は、紙幣搬送ベルトまたは紙幣搬送ローラに所定間隔で複数設けられた指標であることが好ましい。
【0023】
上記発明において、前記移動量検出手段は、前記挿入口から挿入された紙幣が前記移動量検出手段の検出位置に達するまでの間に前記測定指標の移動量データを検出することを特徴とする。
【発明の効果】
【0024】
本発明によれば、紙幣識別センサによる特徴データの検出が2次元移動量検出センサの出力に同期して行われるので、紙幣の滑りが生じても、識別ポイントのずれが生じなくなり、識別精度の低下を防止することができ、受入率の向上に役立つ。
【図面の簡単な説明】
【0025】
【図1】本発明に係る紙幣識別装置の要部断面図である。
【図2】2次元移動量検出センサの構成を示す図である。
【図3】紙幣識別装置の機構を示す概略側面図である。
【図4】図3の上面図である。
【図5】紙幣識別装置の制御機能を示すブロック図である。
【図6】紙幣識別センサのデータ読取タイミングを説明する図である。
【図7】紙幣識別装置の動作を説明するフローチャートである。
【図8】スキュー発生時のデータ処理方法を説明する図である。
【図9】図4の変形例を示す図である。
【図10】図9の変形例を示す図である。
【図11】図9の側面図である。
【図12】図10の変形例を示す図である。
【発明を実施するための形態】
【0026】
<紙幣識別装置の構成の概略>
初めに、図1を参照しながら本発明に係る紙幣識別装置の概略構成を説明する。
図1は本発明に係る紙幣識別装置の要部断面図である。
【0027】
図1に示すように、この紙幣識別装置1は、例えば自動販売機に搭載されるもので、紙幣挿入口2を備えた筐体である装置本体3と、装置本体3内に設けられ、紙幣挿入口2に挿入された紙幣を装置本体3内の紙幣搬送通路に沿って搬送する紙幣搬送手段4と、紙幣搬送手段4により搬送された紙幣の真偽と金種を識別する紙幣識別手段5と、紙幣識別手段5により真券と識別された紙幣を収容するスタッカ6とから構成される。
【0028】
装置本体3は、紙幣挿入口2が形成され、図示しない自動販売機の正面を構成する扉の一部から露出するように配設されるフロントマスク7と、フロントマスク7を正面に装着したフロントプレート8と、フロントプレート8に固着された矩形状の筐体9とから構成される。紙幣挿入口2には、紙幣の挿入を検出する入口センサ21が設けられている。入口センサ21は、反射型の光センサであるが透過型の光センサや直接紙幣に接触して受入れを検知するセンサであってもよい。
【0029】
紙幣搬送手段4および紙幣識別手段5は、ユニットボックス11内に設けられている。スタッカ6は、筐体9の下方に軸受手段12を介し、回動自在および着脱自在に支承されている。
【0030】
紙幣搬送手段4は、ユニットボックス11内の上部に設けられたモータ41と、モータ41の回転を無端の紙幣搬送ベルト44に伝達する駆動プーリ42と、駆動プーリ42との間で紙幣搬送ベルト44を張設する従動プーリ43と、紙幣搬送ベルト44の周面に所定の間隔で設けられた従動ローラ45A乃至45Dとを備えている。
【0031】
なお、駆動プーリ42を支承する軸42aとモータ41の駆動軸41aとの間には、図示しない歯車列が設けられ、その歯車列が動力伝達手段として機能する。図示せぬ制御部からの駆動信号に基づいてモータ41が駆動して駆動軸41aが一方向へ回転すると、その歯車列を介して駆動プーリ42の軸42aが一方向へ回転し、紙幣搬送ベルト44が一方向へ回転する。
【0032】
従動ローラ45A乃至45Dは紙幣搬送ベルト44の表面に圧接するように設けられている。挿入された紙幣は、紙幣搬送ベルト44が回転することによって、従動ローラ45A乃至45Dによって紙幣搬送ベルト44との間に挟持された状態で、紙幣搬送ベルト44の回転方向に搬送される。
【0033】
紙幣識別手段5は、通過する紙幣の特定位置の濃淡を特徴データとして検出する複数の発光素子51および複数の受光素子52から構成される。複数の発光素子51は、ユニットボックス11内に収容されたプリント配線基板54に搭載され、複数の受光素子52はプリント配線基板55に搭載されている。
【0034】
また、紙幣搬送ベルト44に対して紙幣搬送通路を挟んで対向する位置には、2次元移動量検出センサ50が設けられている。この2次元移動量検出センサ50は、パーソナルコンピュータ等のユーザインターフェースとして利用される光学式マウスに搭載される2次元移動量検出センサと同様の機能を有するセンサであって、被測定物の移動量と移動方向を示す情報としてのX方向とY方向の移動量の情報や受光量を出力するセンサである。
【0035】
図2は2次元移動量検出センサ50の構成を示す図である。2次元移動量検出センサ50は、光源81と、2次元受光素子アレイ83と、光源81から照射されて被測定物に反射した光を2次元受光素子アレイ83に集束させるためのレンズ82を備える。2次元受光素子アレイ83は、相補型金属酸化膜半導体(CMOS)からなる。尚、2次元受光素子アレイ83は、電荷結合素子(CCD)のような他の撮像デバイスを使用することも可能である。
【0036】
演算処理部85は、2次元受光素子アレイ83からの出力に基づいて、対象物のX方向とY方向の移動量の演算を行い、演算により求めたX方向とY方向の移動量を表す情報と受光量を表す情報を、インターフェース86を介して外部に出力する。なお、2次元移動量検出センサ50による移動量の検出の原理については、特開2005−41623号公報等に記載されている通り公知の技術であるから詳細な説明は省略する。
【0037】
紙幣処理装置1は、このような2次元移動量検出センサ50を搭載することで、紙幣搬送ベルト44と搬送される紙幣の其々の移動量(X方向の移動量とY方向の移動量)と紙幣搬送ベルト44と搬送される紙幣の其々から反射した受光量を取得して、搬送中の紙幣の傾きや滑りを検出できる。
【0038】
2次元移動量検出センサ50は、従動プーリ43に架けられた紙幣搬送ベルト44の近傍に配置されている。このように従動プーリ44や駆動プーリ42に近い位置に2次元移動量検出センサ50を配置した方が、2次元移動量検出センサ50と紙幣搬送ベルト44との間隔が比較的一定となって、紙幣や紙幣搬送ベルト44の移動量(X方向の移動量とY方向の移動量)が高精度に検出できる。
【0039】
<紙幣搬送機構の構成>
次に、図3と図4を参照しながら本実施形態の紙幣識別装置1に搭載される紙幣搬送手段4、紙幣識別手段5および2次元移動量検出センサ50について詳細に説明する。
図3は紙幣搬送手段4の機構を示す概略側面図、図4は図3の上面図である。図3と図4に示す構成のうち、図1に示す構成と同じ構成には同じ符号を付してあり、重複する説明については適宜省略する。
【0040】
図3の白抜き矢印#1に示すようにして紙幣挿入口2に挿入された紙幣は入口センサ21により検出され、モータ41の駆動によって駆動プーリ42を介して駆動される紙幣搬送ベルト44によって、装置内部へと搬送される。
【0041】
装置内部へと搬送される紙幣は、従動ローラ45Aと従動ローラ45Bの位置を通過し、白抜き矢印#2の先に示す2次元移動量検出センサ50の検出位置(2次元移動量検出センサ50の位置)に到達する。さらに、従動ローラ45Cの位置を通過し、発光素子51と受光素子52からなる紙幣識別センサ71が設けられた位置を通過する。紙幣が紙幣識別センサ71を通過すると、紙幣処理装置1は、紙幣識別センサ71の出力に基づいて紙幣の真偽を判別する。ここで紙幣が真正であると判断されると、紙幣は従動ローラ45Dの位置を通過してスタッカ6に収容される。
【0042】
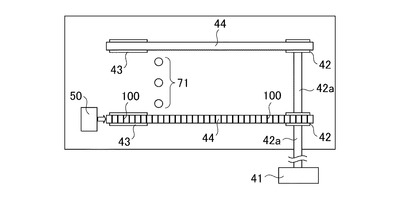
図4に示すように、紙幣識別装置1には、図3に示す駆動プーリ42、従動プーリ43、紙幣搬送ベルト44と同じ構成が並行に2つ設けられており、紙幣搬送ベルト44による紙幣の搬送方向と直交する方向に、紙幣識別センサ71が複数並べて設けられている。
上側の駆動プーリ42と下側の駆動プーリ42は軸42aによって接続され、軸42aには、動力伝達手段となる歯車列などを介してモータ41が接続される。上側の従動プーリ43と下側の従動プーリは図示しない軸によって接続されている。
2次元移動量検出センサ50は、下側の紙幣搬送ベルト44の移動量を検出すべくその付近に設けられ、下側の紙幣搬送ベルト44の紙幣当節接面には、測定指標としてのマーカ100が所定間隔で複数設けられている。そして、紙幣搬送ベルト44によって搬送されている紙幣が、2次元移動量検出センサ50の検出位置に達するまでの間に、2次元移動量検出センサ50によって紙幣搬送ベルト44上のマーカ100を照射した反射光から紙幣搬送ベルト44の移動量データが検出される。
なお、実施例において搬送ベルト44は黒色、マーカ100は白色である。紙幣識別装置1は、2次元移動量検出センサ50が取得する受光量の変化に基づいて搬送ベルト44上のマーカ100を検出する。
【0043】
次に、紙幣識別装置1の制御部(CPU101)の機能構成について詳細に説明する。図5は制御部101の機能構成を示すブロック図である。
【0044】
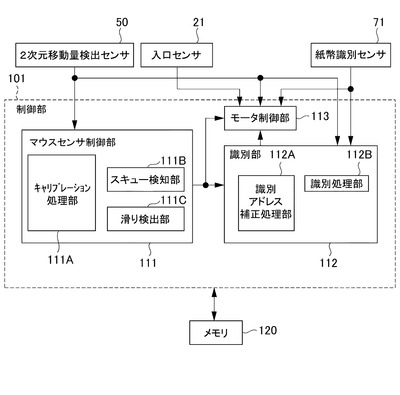
図5に示すように、制御部として機能するCPU101は、予めメモリ120に記憶された所定のプログラムを実行することによって、マウスセンサ制御部111、識別部112、およびモータ制御部113が実現される。
2次元移動量検出センサ50は、紙幣挿入口2から挿入され、紙幣搬送ベルト44によって搬送されている紙幣が、2次元移動量検出センサ50の検出位置に達するまでの間は、紙幣搬送ベルト44上のマーカ100を照射した反射光から紙幣搬送ベルト44の移動量データを検出する。2次元移動量検出センサ50は、紙幣が2次元移動量検出センサ50の検出位置を通過後は、紙幣の移動量データを検出する。
【0045】
マウスセンサ制御部111は、2次元移動量検出センサ50により取得した情報に基づいて紙幣の滑りや傾きを判別するものである。識別部112は、紙幣識別センサ71からの出力信号およびマウスセンサ制御部111からの情報に基づいて紙幣の真偽と金種を判別するものである。モータ制御部113は、紙幣の受入方向への搬送、返却方向への搬送および停止の制御をするものである。メモリ120には、紙幣上の所定位置にある特徴データが基準データとして記憶されている。
マウスセンサ制御部111は、キャリブレーション処理部111A、スキュー検出部111Bおよび滑り検出部111Cから構成され、識別部112は、識別アドレス補正処理部112Aおよび識別処理部112Bから構成される。
【0046】
キャリブレーション処理部111Aは、入口センサの21の出力信号に基づいて紙幣が挿入されたことを検出する毎に、2次元移動量検出センサ50により取得されたX方向とY方向の移動量に基づいて、紙幣が無い状態(言い換えると2次元移動量検出センサ61にまだ搬送されている紙幣が到達しない状態)での紙幣搬送ベルト44の移動量と移動方向を表す基準データを求め、メモリ120へ記憶する。また、キャリブレーション処理部11Aは、2次元移動量検出センサ50により取得された受光量に基づいて、基準となる受光量を求め、この基準データと基準となる受光量をメモリ120へ記憶する。またキャリブレーション処理部111Aは、挿入された紙幣が2次元移動量検出センサ50の位置に到達したことを受光量の変化に基づいて検出する。キャリブレーション処理部111Aは、紙幣が2次元移動量検出センサ50の位置に到達したことを受光量の変化に基づいて検出した場合、紙幣の移動量と移動方向を表す搬送状態情報を求める。
【0047】
キャリブレーション処理部111Aは、2次元移動量検出センサ50が検出した紙幣搬送ベルト44の移動量データに基づいて、2次元移動量検出センサ50の単位出力当たりの基準移動量を算出する。さらに、キャリブレーション処理部111Aは、算出した基準移動量に基づいて、紙幣上の特徴データを読み取る測定位置を取得する。
【0048】
スキュー検出部111Bは、キャリブレーション処理部111Aが搬送状態情報として求めた紙幣の移動方向と、メモリ120に記憶した基準データの移動方向を表す情報とを比較して紙幣のスキューを検出する。
また、滑り検出部111Cは、キャリブレーション処理部111Aが求めた搬送状態情報として求めた紙幣の移動量と、メモリ120に記憶した基準データの移動量とを比較して紙幣の滑りを検出する。
スキュー検出部111Bにより検出されたスキューの情報と滑り検出部111Cにより検出されたスキューの情報は、識別部112とモータ制御部113に供給される。
【0049】
識別アドレス補正処理部112Aは、スキュー検出部111Bにより求められたスキューに基づいて、紙幣搬送ベルト44により搬送されている紙幣の識別アドレスを補正する。
【0050】
識別処理部112Bは、キャリブレーション処理部111Aにて取得した測定位置における特徴データと、メモリ120に予め記憶されており、識別処理部112に対して予め与えられている紙幣の各位置の基準データとを比較して紙幣の真偽を識別する。
また、識別処理部112Bは、紙幣識別センサ71により検出された、識別アドレス補正後の紙幣の特徴データをマッチングし、紙幣の真偽と種類を識別する。識別処理部112Bにより識別された紙幣の真偽を表す情報はモータ制御部113に出力される。
【0051】
モータ制御部113は、入口センサ21により紙幣の挿入が検出された場合、モータ41の駆動を開始させる。また、モータ制御部113は、スキュー検出部111Bにより検出されたスキューまたは滑り検出部111Cにより検出された滑りが、識別アドレス補正処理部112Aが識別アドレスを補正しきれないほど大きい場合、モータ41を逆回転させて紙幣の返却動作を行う。モータ制御部113は、挿入された紙幣が真券ではないとして識別処理部112Bにより識別された場合も同様に紙幣の返却動作を行わせる。
【0052】
(紙幣搬送前の搬送状態の基準データ取得)
紙幣の挿入が検出されてから2次元移動量検出センサ50の位置に紙幣が到達するまでの所定期間(時間T1)において、2次元移動量検出センサ50の出力するX方向(紙幣の搬送方向)の移動量をX1、Y方向(紙幣の搬送方向と直交する方向)の移動量をY1とすると、基準データの内、方向の基準を表す値である方向基準値α1は下式(1)により求められる。
α1 = ArcTan(Y1/X1) ・・・ (1)
【0053】
また、紙幣の挿入が検出されてから2次元移動量検出センサ50の検出位置に紙幣が到達するまでの所定期間(時間T1)における基準データの移動量基準値V1は下式(2)により求められる。なお、絶対値較正をしてないので移動量基準値V1は相対値である。
V1 = SQRT(X12 + Y12) / T1 ・・・ (2)
【0054】
(紙幣到達以後の搬送状態情報の求め方と紙幣のスキュー、滑り検出)
2次元移動量検出センサ50の位置に紙幣が到達すると、2次元移動量検出センサ50が出力するX方向とY方向の移動量に基づいて、上述した基準データの求め方と同様の方法で紙幣の移動方向情報α1billが下式(3)から求められる。
α1bill= ArcTan(Ybill/Xbill) ・・・ (3)
【0055】
また、2次元移動量検出センサ50が出力するX方向とY方向の移動量に基づいて、上述した基準データの求め方と同様の方法で、紙幣の移動量を示す値であるV2が下式(4)から求められる。
V2= SQRT(Xbill2 + Ybill2) / T2 ・・・ (4)
【0056】
紙幣のスキューと滑りが次の式から求められる。
スキュー = αbill − α1 ・・・ (5)
【0057】
紙幣の滑りは次の式から求められる。
滑り = V2 − V1 ・・・ (6)
【0058】
(2次元移動量検出センサ50の単位出力当たりの紙幣移動量を算出する方法)
キャリブレーション処理部111Aは、入口センサ21が紙幣を検知すると、モータ41を駆動して紙幣が無い状態における、2次元移動量検出センサ50から出力される1ドット(単位出力)当たりの搬送ベルト44の基準移動量を求める。
搬送ベルト44に付けられたマーカ100の間隔をL0とし、L0当たりの紙幣無しでの紙幣搬送方向(X方向)の2次元移動量検出センサ50から出力される、ドット数がX0(ドット)であった場合の1ドット(単位出力)当たりの基準移動量X2(mm)は、下式(7)から求められる。
X2=L0/X0 ・・・ (7)
【0059】
(2次元移動量検出センサ50の出力でサンプリングする方法)
所定のサンプリング間隔L1(mm)を紙幣搬送するのに必要な2次元移動量検出センサ50から出力されるドット数X3は、式(8)から求められる。
X3=L1/X2 ・・・ (8)
ここで、ドット数X3は、紙幣上の特徴データを読み取る測定位置となる。
例えば、搬送ベルト44のマーカ100の間隔L0=10mm間隔であって、0.5mm移動ごとにサンプリングをするとした場合、2次元移動量検出センサ50から出力されるマーカ間の2次元移動量検出センサ50のドット数が、1000ドットの時、
L0=10mm、L1=0.5mm、X0=1000ドットとすると、
・単位出力当たりの基準移動量:X2=10/1000=0.01mm/ドット
・測定位置:X3=0.5/0.01=50ドット
となる。したがって、0.5mm毎にサンプリングを行うためには、2次元移動量検出センサ50の移動量(測定位置)X3=50ドット毎にサンプリングを行う必要がある。
【0060】
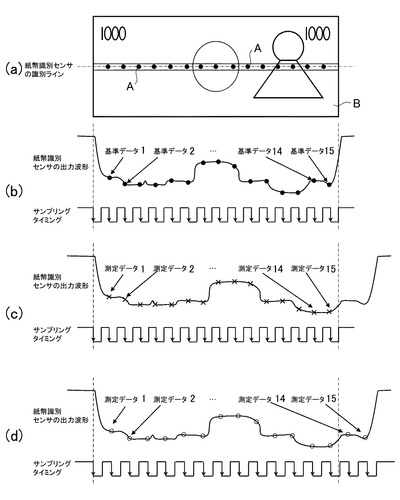
次に、紙幣の特徴データのサンプリング方法について説明する。図6は紙幣の特徴データをサンプリングする方法を示す図、(a)は紙幣のサンプリング位置としての識別ポイントを説明する図、(b)はパルスエンコーダの出力に同期させてサンプリングする従来の例を説明する図、(c)はパルスエンコーダの出力に同期させてサンプリングする紙幣処理装置において紙幣に滑りが生じた場合のサンプリング位置のずれを説明する図、(d)は本発明の2次元移動量検出センサ50の出力に同期させてサンプリングを行う方法を示す図である。同図(b)〜(d)中、紙幣識別センサ71の出力波形とサンプリングタイミングを示している。
【0061】
図6(a)に示すように、紙幣Bには識別ポイトAが等間隔で多数配置されている。この識別ポイントAが紙幣識別センサ71のサンプリング点である。従来、同図(b)のように、モータ41に取り付けたパルスエンコーダの出力信号に同期して紙幣識別センサ71の出力信号をサンプリングしていた。
しかし、同図(c)に示すように、紙幣の滑りが生じると、紙幣識別センサ71のサンプリング位置が識別ポイトAから外れ、識別ポイトA上の基準データと実際の測定データとの間に誤差を生じてしまうという問題があった。
【0062】
そこで、本実施形態では、同図(d)のように、2次元移動量検出センサ50の出力に同期させて紙幣識別センサ71の出力信号をサンプリングすることで、紙幣の滑りが生じても、紙幣識別センサ71が識別ポイトA上の特徴データを正確にサンプリングすることができる。したがって、紙幣の滑りによる識別精度の低下を防止することができ、受入率を向上できる。
【0063】
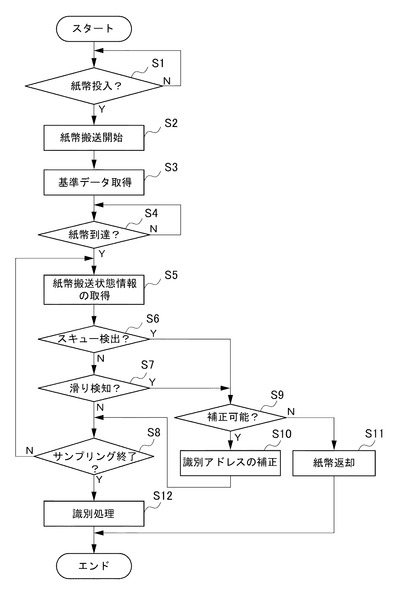
次に、紙幣識別装置1の動作について説明する。図7は、紙幣識別装置の動作を説明するフローチャートである。
図7に示すように、ステップS1において入口センサ21により紙幣の挿入が検出された場合(ステップS1にてYes)、ステップS2において、モータ制御部113はモータ41を制御し、挿入された紙幣の搬送を開始する。
【0064】
ステップS3において、キャリブレーション処理部111Aは、紙幣が2次元移動量検出センサ50の位置に到達する前に2次元移動量検出センサ50により検出された紙幣搬送ベルト44の移動量に基づいて、上式(1)と(2)により基準データを求める。
また、キャリブレーション処理部111Aは基準受光量を取得する。
【0065】
また、キャリブレーション処理部111Aは、2次元移動量検出センサ50が検出した紙幣搬送ベルト44の移動量データに基づいて、式(7)により2次元移動量検出センサ50の単位出力当たりの基準移動量を算出する。さらに、キャリブレーション処理部111Aは、上記算出した基準移動量に基づいて、式(8)により紙幣上の特徴データを読み取る測定位置を取得する。
【0066】
ステップS4において、キャリブレーション処理部111Aは、紙幣が2次元移動量検出センサ50の検出位置に到達したか否かを2次元移動量検出センサ50により検出される受光量の変化に基づいて判定する。紙幣が2次元移動量検出センサ50の検出位置に到達したとステップS4において判定された場合(ステップS4にてYes)、ステップS5において、キャリブレーション処理部111Aは上式(3)と(4)によって紙幣の搬送状態情報をリアルタイムで算出する処理を開始する。
また、紙幣が紙幣識別センサ71に到達すると、上記式(8)により求めた測定位置X3毎に紙幣の特徴データをサンプリングする。
【0067】
ステップS6において、スキュー検出部111Bは、上記ステップS5において取得した紙幣の搬送状態情報と基準データとを比較してスキューを検出したか否かを判定する。
例えば、上式(5)により求められた値が予め定められた閾値と比較され、閾値を超えた場合、スキューを検出したとして判定される(ステップS6にてYes)。
【0068】
ステップS6においてスキューが検出されていない場合(ステップS6にてNo)、ステップS7において、滑り検出部111Cは、滑りを検出したか否かを判定する。例えば、上式(6)により求められた値が閾値と比較され、予め定められた閾値を超えた場合、滑りを検出したとして判定される。
【0069】
ステップS7において滑りが検出されていない場合(ステップS7にてNo)、ステップS8において、紙幣識別センサ71によるサンプリングが終了したか否か、すなわち、紙幣識別センサ71の識別エリアを通過したか否かを判定する。紙幣が紙幣識別センサ71を通過したか否かは、紙幣識別センサ71を構成する受光素子52の受光量の変化に基づいて判定する。ここで、紙幣識別センサ71によるサンプリングが終了したとステップS8において判定された場合、ステップS5に戻り、同様の処理が繰り返される。
【0070】
一方、ステップS6においてスキューが検出された場合(ステップS6にてYes)、またはステップS7において滑りが検出された場合(ステップS7にてYes)、ステップS9において、識別アドレス補正処理部112Aは補正が可能であるか否かを判定する。
【0071】
スキューや滑りが微小であることから補正が可能であるとステップS9において判定した場合(ステップS9にてYes)、ステップS10において、識別アドレス補正処理部112Aは、スキュー検出部111Bにより検出された紙幣のスキュー量に応じて識別アドレスを補正する。
【0072】
一方、ステップS9において補正が不可能であると判定された場合(ステップS9にてNo)、ステップS11において、モータ制御部113がモータ41を制御し、紙幣の搬送を停止し、さらにモータ41を逆回転して紙幣の返却動作を行う。ステップS10において紙幣の返却が行われると、処理を終了する。
【0073】
ステップS8において、紙幣識別センサ71によるサンプリングが終了したと判定された場合(ステップS8にてYes)、ステップS12において識別処理を行い、全ての紙幣の特徴データの取得が終わると、識別処理部112Bは、キャリブレーション処理部111Aにて取得した測定位置における特徴データと、メモリ120に予め記憶されており、識別処理部112に対して予め与えられている紙幣の各位置の基準データとを比較して紙幣の真偽を識別する。
このように、2次元移動量検出センサ50の出力に同期させて紙幣識別センサ71の出力信号をサンプリングしているので、紙幣の滑りが生じても、紙幣識別センサ71が識別ポイトA上の特徴データを正確にサンプリングすることができる。したがって、紙幣の滑りによる識別精度の低下を防止することができ、受入率を向上できる。
【0074】
次に、上記ステップS10の識別アドレスの補正方法について説明する。
図8は、スキュー発生時のデータ処理方法を説明する図、(a)は紙幣と紙幣識別センサ71の識別ライン−1〜+1を説明する図、(b)は紙幣識別センサ71の出力波形とサンプリングタイミングを説明する図、(c)はスキュー量を閾値の関係を説明する図である。
ここでは、3つの識別ライン−1〜+1の場合を例にとり、この3つの識別ラインは図4の紙幣識別センサ71の個数に対応している。
【0075】
識別部112Aは、スキュー検知部111Bからのスキュー情報により識別アドレスの補正を行う。具体的には、スキューが発生した場合、規定値以上のスキューの発生箇所については特徴データのばらつきを考慮して判定閾値(紙幣の真偽と種類の判定に用いる閾値)を広げるように補正アドレスの補正を行う。
また、予め、紙幣Bの幅方向中央にある基準識別ライン0の両側に別の識別ライン±1を設定しておき(図8(a)参照)、紙幣識別センサ71を各識別ラインに沿って走査させてその出力をメモリ120に記憶している。(同図(b)参照)。
そして、同図(c)に示すように、スキュー量に応じて判定パターンを選択して識別を行う。具体的には、黒丸印のデータについては基準識別ライン0の基準データで判定し、黒三角印のデータについては識別ライン+1の基準データで判定し、黒逆三角印のデータについては識別ライン−1の基準データで判定することになる。
いずれの方法でも、スキュー量に応じて判定閾値が変化するので、スキュー発生による識別精度の低下を防止することができ、受入率の向上に役立つ。
【0076】
次に、本発明の実施形態の変形例について説明する。図9は、本発明の実施形態の変形例を示す図である。上記本実施形態では、紙幣搬送ベルト44にマーカ100を設けたが、図9に示すように、従動プーリ43のリムを大きくして測定ローラ121を形成し、この測定ローラ121の周面にマーカ100を設けてもよい。測定ローラ121の直径は、従動プーリ43に架けられた紙幣搬送ベルト44の直径と同一であって、測定ローラ121の周速を紙幣搬送ベルト44の移動速度と等しくしてある。2次元移動量検出センサ50は、測定ローラ121と搬送通路を挟んで対向する位置に設けられている。これにより、紙幣搬送ベルト44の張りによる暴れや紙幣搬送ベルト44の摩耗の影響を受けることなく、測定ローラ121の移動量をより高精度に測定することができる。
【0077】
次に、紙幣搬送機構の変形例について説明する。
図10は紙幣搬送機構の概略を示す上面図、図11は図10の側面図である。上記実施形態では、紙幣搬送ベルト44により紙幣を搬送するものについて説明したが、紙幣搬送機構には紙幣搬送ローラにより紙幣を搬送するものがある。
この紙幣搬送機60は、軸61の両端に紙幣搬送ローラ62を設けた紙幣搬送体63を3組備え、これら紙幣搬送体63をモータ64で同一方向に回転させている。各紙幣搬送ローラ62には押圧ローラ65が圧接してあり、これらローラ62,65で紙幣Bを噛み込んで搬送する。
【0078】
図11の矢印#1で示す方向から紙幣Bを挿入すると、入口センサ21が紙幣Bの挿入を検知し、モータ41の駆動によって各紙幣搬送ローラ62が回転する。紙幣Bは紙幣搬送ローラ62と押圧ローラ65に噛み込まれて装置内部に取り込まれ、図中左側の紙幣搬送ローラ62で向きを反転させる際に2次元移動量検出センサ50の検出エリアを通過する。紙幣搬送ローラ62で向きを反転させた紙幣Bは、発光素子51と受光素子52からなる紙幣識別センサ71の検出エリアを通過し、図中右側の紙幣搬送ローラ62と押圧ローラ65に噛み込まれて装置外に排出される。このような紙幣搬送機60では、2次元移動量検出センサ50の検出エリア内にある紙幣搬送ローラ62の周面にマーカ100を設けている。
【0079】
図12は図10の変形例を示している。
搬送機構60の構成自体は上述のものと同一であるが、図中左側の紙幣搬送体63を構成する紙幣搬送ローラ62の内側に測定ローラ66を設けるとともに、この測定ローラ66を2次元移動量検出センサ50の検出エリア内に配置してある。測定ローラ66は直径が紙幣搬送ローラ62と同一であって、その周面にマーカ100を設けている。この搬送機構60では、測定ローラ66は押圧ローラ65が圧接されていないので、摩耗による測定精度の経年劣化の虞がない。
【0080】
以上においては、紙幣搬送ベルト44上、または従動プーリ43のリム上に2次元移動量検出センサ50を設ける場合について説明したが、駆動プーリを駆動する駆動軸上の位置などの他の位置に設けるようにすることも可能である。
【0081】
また、以上においては、基準データの取得を紙幣の挿入が検出される毎に行われる例を基に説明をしたが、紙幣が挿入されていない状態(待機状態)において、数分毎に、基準データの取得を定期的に行なって、紙幣を挿入後は紙幣の搬送状態情報の取得のみを実行する構成とすることも可能である。
【0082】
尚、上述した本実施例に係わる紙幣処理装置はいずれも、2次元移動量検出センサにより紙幣の移動量を直接検出するようにしたから、従来の紙幣処理装置が紙幣の移動量を測定する為に搭載しているパルスエンコーダを備えない構成である。
【0083】
この発明は、上記実施の形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化したり、上記実施の形態に開示されている複数の構成要素を適宜組み合わせたりすることにより種々の発明を形成できる。例えば、実施の形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施の形態に亘る構成要素を適宜組み合わせても良い。
【符号の説明】
【0084】
1 紙幣識別装置
21 入口センサ
42 駆動プーリ
43 従動プーリ
44 紙幣搬送ベルト
45A乃至45D 押圧ローラ
50 2次元移動量検出センサ
62 紙幣搬送ローラ
65 押圧ローラ
71 紙幣識別センサ
100 マーカ
111 搬送状態判別部
111A キャリブレーション処理部
111B スキュー検出部
111C 滑り検出部
112 識別部
112A 識別アドレス補正処理部
112B 識別処理部
113 モータ制御部
120 メモリ
121 測定ローラ
【特許請求の範囲】
【請求項1】
紙幣の真偽を識別する紙幣識別装置であって、
挿入口から挿入された紙幣を搬送する搬送手段と、
前記搬送手段に設けられた測定指標と、
前記搬送手段上の測定指標を照射した反射光から前記搬送手段の移動量データを検出するとともに、前記搬送手段が前記紙幣を搬送しているときに前記紙幣を照射した反射光から前記紙幣の移動量データを検出する移動量検出手段と、
前記移動量検出手段が検出した搬送手段の移動量データに基づいて、前記移動量検出手段の単位出力当たりの基準移動量を算出する基準移動量算出手段と、
前記基準移動量算出手段により算出した基準移動量に基づいて、前記紙幣上の特徴データを読み取る測定位置を取得する測定位置取得手段と、
前記紙幣から前記測定位置における特徴データを検出する特徴データ検出手段と、
前記紙幣上の所定位置にある特徴データを基準データとして記憶する基準データ記憶手段と、
前記特徴データ検出手段によって検出した前記測定位置における特徴データと、前記基準データ記憶手段に記憶した基準データとを比較して前記紙幣の真偽を識別する識別手段と、
を備えることを特徴とする紙幣識別装置。
【請求項2】
前記測定指標は、紙幣搬送ベルトまたは紙幣搬送ローラに所定間隔で複数設けられた指標であることを特徴とする請求項1に記載の紙幣識別装置。
【請求項3】
前記移動量検出手段は、前記挿入口から挿入された紙幣が前記移動量検出手段の検出位置に達するまでの間に前記測定指標の移動量データを検出することを特徴とする請求項1または請求項2に記載の紙幣識別装置。
【請求項1】
紙幣の真偽を識別する紙幣識別装置であって、
挿入口から挿入された紙幣を搬送する搬送手段と、
前記搬送手段に設けられた測定指標と、
前記搬送手段上の測定指標を照射した反射光から前記搬送手段の移動量データを検出するとともに、前記搬送手段が前記紙幣を搬送しているときに前記紙幣を照射した反射光から前記紙幣の移動量データを検出する移動量検出手段と、
前記移動量検出手段が検出した搬送手段の移動量データに基づいて、前記移動量検出手段の単位出力当たりの基準移動量を算出する基準移動量算出手段と、
前記基準移動量算出手段により算出した基準移動量に基づいて、前記紙幣上の特徴データを読み取る測定位置を取得する測定位置取得手段と、
前記紙幣から前記測定位置における特徴データを検出する特徴データ検出手段と、
前記紙幣上の所定位置にある特徴データを基準データとして記憶する基準データ記憶手段と、
前記特徴データ検出手段によって検出した前記測定位置における特徴データと、前記基準データ記憶手段に記憶した基準データとを比較して前記紙幣の真偽を識別する識別手段と、
を備えることを特徴とする紙幣識別装置。
【請求項2】
前記測定指標は、紙幣搬送ベルトまたは紙幣搬送ローラに所定間隔で複数設けられた指標であることを特徴とする請求項1に記載の紙幣識別装置。
【請求項3】
前記移動量検出手段は、前記挿入口から挿入された紙幣が前記移動量検出手段の検出位置に達するまでの間に前記測定指標の移動量データを検出することを特徴とする請求項1または請求項2に記載の紙幣識別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−93874(P2012−93874A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−239358(P2010−239358)
【出願日】平成22年10月26日(2010.10.26)
【出願人】(307003777)株式会社日本コンラックス (140)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月26日(2010.10.26)
【出願人】(307003777)株式会社日本コンラックス (140)
【Fターム(参考)】
[ Back to top ]