
紙葉類処理装置、及び紙葉類処理方法
【課題】 より高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供する。
【解決手段】 一実施形態に係る紙葉類処理装置は、紙葉類を搬送する搬送手段と、搬送される前記紙葉類に対して光を照射する照明手段と、前記紙葉類から画像を取得する画像取得手段と、搬送される前記紙葉類の深度と前記照明手段から放射される光の照度分布とに基づいて予め算出される補正係数を格納する補正係数格納手段と、前記補正係数により、前記画像取得手段により取得された前記画像を補正する補正処理手段と、を具備する。
【解決手段】 一実施形態に係る紙葉類処理装置は、紙葉類を搬送する搬送手段と、搬送される前記紙葉類に対して光を照射する照明手段と、前記紙葉類から画像を取得する画像取得手段と、搬送される前記紙葉類の深度と前記照明手段から放射される光の照度分布とに基づいて予め算出される補正係数を格納する補正係数格納手段と、前記補正係数により、前記画像取得手段により取得された前記画像を補正する補正処理手段と、を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、紙葉類処理装置、及び紙葉類処理方法に関する。
【背景技術】
【0002】
従来、種々の紙葉類の検査を行う紙葉類処理装置が実用化されている。紙葉類処理装置は、紙葉類の画像を読み取る画像読取装置を有する。紙葉類処理装置は、投入部に投入された紙葉類を1枚ずつ取り込み、検査部に搬送する。
【0003】
検査部は、紙葉類の特徴を検知する検知部を備える。検査部は、検知部により所定の方向に搬送される紙葉類から特徴量を検知する。例えば、検査部は、検知結果に基づいて紙葉類の券種(category)、額面(denomination)、及び方向(direction)を判定する。また、例えば、検査部は、検知結果に基づいて紙葉類の正損(Fitness)を判定する。また、例えば、検査部は、検知結果に基づいて紙葉類の真偽(authentication)を判定する。
【0004】
検査部は、例えば、紙葉類の画像を取得し、取得した紙葉類の画像と、予め設定されたパラメータとを比較し、比較結果に基づいて紙葉類の検査する紙葉類の券種、正損、及び真偽などを検知する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4505053号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記したような紙葉類処理装置は、紙葉類を高速で搬送させる。検査部は、高速で搬送されている紙葉類に対して光源により光を照射する。検査部は、紙葉類が搬送される搬送路に対して光源と同じ側に設置されたセンサにより紙葉類からの反射光を電気信号に変換し、紙葉類の画像を取得する。
【0007】
高速で搬送されている紙葉類は、例えばばたつきなどの変位が生じる場合がある。また、光源から出力される光は、光源からの距離に応じた配光傾斜(分布)を有する。この為、紙葉類に変位が生じた場合、光源の配光傾斜の影響を受ける可能性がある。これにより、紙葉類の画像に影響を与える可能性がある。
【0008】
そこで、より高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
一実施形態に係る紙葉類処理装置は、紙葉類を搬送する搬送手段と、搬送される前記紙葉類に対して光を照射する照明手段と、前記紙葉類から画像を取得する画像取得手段と、搬送される前記紙葉類の深度と前記照明手段から放射される光の照度分布とに基づいて予め算出される補正係数を格納する補正係数格納手段と、前記補正係数により、前記画像取得手段により取得された前記画像を補正する補正処理手段と、を具備する。
【図面の簡単な説明】
【0010】
【図1】図1は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図2】図2は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図3】図3は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図4】図4は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図5】図5は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図6】図6は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図7】図7は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図8】図8は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図9】図9は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図10】図10は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図11】図11は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図12】図12は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図13】図13は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図14】図14は、一実施形態に係る紙葉類処理装置について説明するための図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら、一実施形態に係る紙葉類処理装置、及び紙葉類処理方法について詳細に説明する。
【0012】
図1は、一実施形態に係る紙葉類処理装置100の構成例について説明するための説明図である。
紙葉類処理装置100は、操作員の操作に基づいて、紙葉類1の検査を行う。紙葉類処理装置100は、検査を行った紙葉類1を集積部により集積及び/又は施封する。
【0013】
紙葉類処理装置100は、供給部2、取り込み部3、搬送状態検知部4、検査部5、厚さ検知部6、集積部7、制御部8、排除券集積部9、及び搬送部41を備える。さらに、紙葉類処理装置100は、紙葉類1の搬送先を切り替える為の第1のゲートG1及び第2のゲートG2を備える。
【0014】
供給部2は、紙葉類処理装置100に取り込む紙葉類1をストックする。供給部2は、重ねられた状態の紙葉類1をまとめて受け入れる装填口を備える。
【0015】
取り込み部3は、分離ローラを備える。分離ローラは、供給部2の上端に設置される。供給部2に紙葉類1が投入される場合、分離ローラは、投入された紙葉類1の集積方向の上端に接する。分離ローラは、回転することにより、供給部2に装填される紙葉類1を集積方向の上端から1枚ずつ紙葉類処理装置100の内部に取り込む。
【0016】
分離ローラは、たとえば、1回転するごとに1枚の紙葉類1を取り込む。これにより、分離ローラは、紙葉類1を一定の間隔で取り込む。分離ローラにより取り込まれた紙葉類1は、搬送部41に導入される。
【0017】
搬送部41は、紙葉類1を紙葉類処理装置100内の各部に搬送する搬送部である。搬送部41は、図示しない搬送ベルト及び図示しない駆動プーリなどを備える。搬送部41は、図示しない駆動モータにより駆動プーリを駆動する。搬送ベルトは、駆動プーリにより動作する。
【0018】
搬送部41は、取り込み部3の分離ローラにより取り込まれる紙葉類1を搬送ベルトにより一定速度で搬送する。なお、搬送部41において取り込み部3に近い側を上流側、逆側を下流側として説明する。
【0019】
搬送状態検知部4は、搬送部41により搬送される紙葉類1の搬送状態を検知する。搬送状態検知部4は、搬送路上における紙葉類1の位置、スキュー量、及び搬送ギャップなどを検知する。
【0020】
例えば、搬送状態検知部4は、紙葉類1の中心を特定し、特定した中心からのズレを計測することにより、搬送ズレを検知する。また、例えば、搬送状態検知部4は、紙葉類1の搬送方向に対する傾きを計測することにより、スキュー量を検知する。また、例えば、搬送状態検知部4は、紙葉類1の搬送方向における後端と、次に搬送される紙葉類1の搬送方向における先端との距離を測定することにより、搬送ギャップを検知する。
【0021】
検査部5は、真偽検知部51、正損検知部52、券種検知部53、及び記番号検知部54を備える。
真偽検知部51は、紙葉類1が真券(genuine)であるか、偽券(counterfeit)であるかを検知する。真偽検知部51は、例えば紙葉類1の物理的特性(特徴)を検知する物理特性検知部、及び/または、磁気検知部などを備える。物理特性検知部は、例えば、紙葉類1から蛍光特性、または赤外線特性などを検知する。磁気検知部は、例えば、紙葉類1から磁気特性を検知する。真偽検知部51は、物理特性検知部、及び/または磁気検知部における検知結果に基づいて紙葉類1の真偽(authentication)を判定する。
【0022】
正損検知部52は、紙葉類1の正損(Fitness)を検知する。即ち、正損検知部52は、紙葉類1が再流通可能(recirculatable)な正券(fit sheet)であるか、再流通不可能(unrecirculatable)な損券(unfit sheet)であるかを検知する。例えば、正損検知部52は、紙葉類1の物理的特性を検知し、検知結果に基づいて、紙葉類1の正損を判定する。なお、正損検知部52は、真偽検知部51により真券であると判定された紙葉類1に対して正損を判定する。
【0023】
券種検知部53は、紙葉類1の券種(category)及び額面(denomination)を検知する。券種検知部53は、紙葉類1の両面から光学的特徴(画像)を検知する。また、券種検知部53は、紙葉類1の券種を判定する為の辞書を備える。
【0024】
券種検知部53は、紙葉類1から取得した画像に基づいて、特徴量(feature value)を抽出する。券種検知部53は、抽出した特徴量と、辞書に記憶されている券種毎のパラメータとの類似度を算出する。券種検知部53は、算出した類似度と、予め設定される閾値とに基づいて、紙葉類1の券種を検知する。さらに、券種検知部53は、紙葉類1の表/裏、正向き/逆向きを検知する。なお、以下、紙葉類1の表裏、及び正逆をまとめて券種と称する。
【0025】
記番号検知部54は、紙葉類1に記載されている記番号を検知する。記番号検知部54は、紙葉類1から画像を取得し、取得した画像中の記番号を文字認識を検知することにより、紙葉類1の記番号を取得する。
【0026】
なお、検査部5は、真偽検知部51、正損検知部52、券種検知部53、及び記番号検知部54の処理に用いられる紙葉類1の画像を取得する画像取得部を有する。なお、画像取得部の構成については後述する。
【0027】
厚さ検知部6は、搬送部41により搬送される紙葉類1の厚さを検知する。厚さ検知部6は、紙葉類1の厚さに基づいて、紙葉類1が複数枚重なっている旨、及び紙葉類1の折れなどを検知する。
【0028】
集積部7は、紙葉類1を検査部5により検知する券種毎に区分して集積する。集積部7は、正券集積部71と損券集積部72とを備える。正券集積部71は、検査部5により真券であり、且つ正券であると判定された紙葉類1を集積する。さらに、正券集積部71は、集積した紙葉類1の枚数が所定枚数に達する場合、紙葉類1を所定枚数毎に施封する。損券集積部72は、検査部5により真券であり、且つ損券であると判定された紙葉類1を集積する。
【0029】
制御部8は、紙葉類処理装置100の各部の動作を統合的に制御する。制御部8は、主制御部81、総合判定部82、及び操作部83などを備える。主制御部81は、総合判定部82による判定結果に基づいて、搬送部41、第1のゲートG1、及び第2のゲートG2の動作を制御する。
【0030】
総合判定部82は、搬送状態検知部4、検査部5、及び厚さ検知部6の検知結果に基づいて、紙葉類1の搬送先を総合的に判定する。
【0031】
例えば、総合判定部82は、真偽検知部51により真券であると判定され、正損検知部52により正券であると判定された紙葉類1の搬送先を正券集積部71に決定する。主制御部81は、紙葉類1を正券集積部71に搬送するように第1のゲートG1及び第2のゲートG2を制御する。即ち、主制御部81は、第1のゲートG1を反時計回りに回動し、第2のゲートG2を時計回りに回動するように制御する。
【0032】
また、総合判定部82は、真偽検知部51により真券と判定され、正損検知部52により損券であると判定された紙葉類1の搬送先を損券集積部72に決定する。主制御部81は、紙葉類1を損券集積部72に搬送するように第1のゲートG1及び第2のゲートG2を制御する。即ち、主制御部81は、第1のゲートG1を反時計回りに回動し、第2のゲートG2を反時計回りに回動するように制御する。
【0033】
またさらに、総合判定部82は、真偽検知部51により偽券、または排除券と判定された紙葉類1の搬送先を排除券集積部9に決定する。主制御部81は、紙葉類1を排除券集積部9に搬送するように第1のゲートG1を制御する。即ち、主制御部81は、第1のゲートG1を時計回りに回動するように制御する。
【0034】
またさらに、総合判定部82は、厚さ検知部6により紙葉類1が複数枚重なっている事、または、紙葉類1の折れを検知する場合、紙葉類1の搬送先を排除券集積部9に決定する。主制御部81は、紙葉類1を排除券集積部9に搬送するように第1のゲートG1を制御する。即ち、主制御部81は、第1のゲートG1を時計回りに回動するように制御する。
【0035】
操作部83は、例えばキーボード、表示部と一体に形成されるタッチパネル、または操作者による操作に応じた操作信号を受け付ける入力部などを備える。操作部83は、入力される操作に基づいて操作信号を生成する。操作部83は、生成した操作信号を主制御部81に入力する。主制御部81は、入力される操作信号に基づいて、種々の処理を実現する為の制御信号を生成する。
【0036】
排除券集積部9は、検査部5の真偽検知部51により偽券と判定された紙葉類1、厚さ検知部6により複数枚重なっていると判定された紙葉類1、及び、厚さ検知部6により折れが存在すると判定された紙葉類1を集積する。
【0037】
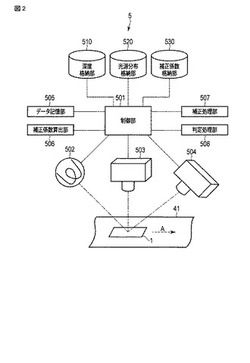
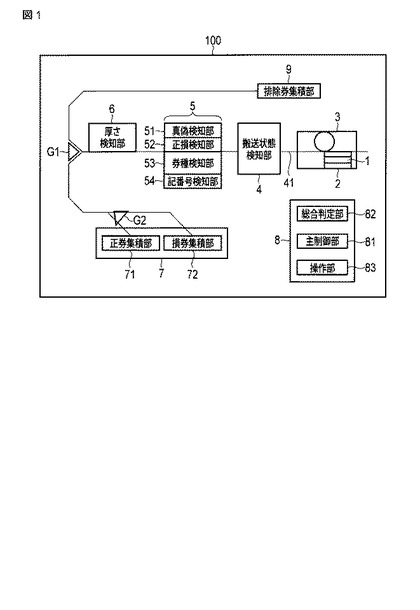
図2は、検査部5の画像読取部に相当する構成の例を示す。
検査部5は、制御部501、照明部502、センサ503、深度検出部504、データ記憶部505、補正係数算出部506、補正処理部507、判定処理部508、深度格納部510、光源分布格納部520、及び補正係数格納部530を備える。
【0038】
制御部501は、検査部5の各部の動作を制御する。制御部501は、CPU、バッファメモリ、プログラムメモリ、及び不揮発性メモリなどを備えている。
【0039】
CPUは、種々の演算処理を行う。バッファメモリは、CPUにより演算結果を一時的に記憶する。プログラムメモリ及び不揮発性メモリは、CPUが実行する種々のプログラム及び制御データなどを記憶する。
【0040】
制御部501は、CPUによりプログラムメモリに記憶されているプログラムを実行することにより、種々の処理を行うことができる。例えば、制御部501は、照明部502、センサ503、及び深度検出部504の動作タイミングを制御する。
【0041】
また、制御部501は、図1に示す制御部8に接続されている。例えば、制御部501は、処理結果を制御部8に伝送することができる。また、制御部501は、制御部8から送信される制御信号に基づいて、検査部5の各部の動作を制御することが出来る。
【0042】
照明部502は、搬送部41により矢印Aの方向(搬送方向)に搬送される紙葉類1に対して光を照射する。照明部502は、例えば、蛍光灯、ハロゲンランプ、またはLEDなどの光源と、光源から発せられた光をセンサ503の読取位置に導光する導光部材とを備える。即ち、照明部502は、前記503の読取位置を含む範囲に光を照射する。
【0043】
なお、照明部502は、センサ503の走査方向と平行に複数配列されたLED、またはセンサ503の走査方向と平行な直管型の蛍光灯などを備える構成であってもよい。また、照明部502は、センサ503を挟んで上流側と下流側とからセンサ503の読取位置に光を照射する構成であってもよい。またさらに、センサ503の読取光軸上に設けられたハーフミラーを導光部材として備える構成であってもよい。この場合、照明部502は、センサ503の読取位置に対して垂直方向から光を照射することが出来る。
【0044】
センサ503は、紙葉類1の一方の面から光度に応じた強度の電気信号を生成する。センサ503は、例えば、Charge Coupled Device(CCD)などの受光素子と、光学系とを備える。光学系は、所定の読取位置(走査範囲)から光を受光し、受光した光を受光素子に結像させる。この読取位置に紙葉類1が存在する場合、光学系は、紙葉類1の面で反射した反射光を受光し、受光素子に結像させる。受光素子は、結像された光に基づいて電気信号を生成する。受光素子は、例えば、カラーイメージセンサーがライン状に配設されたラインセンサーなどにより構成される。受光素子は、紙葉類1の搬送方向aと直交する方向に走査するように配置される。
【0045】
センサ503は、搬送部41によって搬送方向Aの方向に搬送される紙葉類1から連続して電気信号を生成することにより、紙葉類1の全体の二次元的な画像を取得する。
【0046】
なお、カラーイメージセンサーは、例えば、赤(R)、緑(G)、青(B)構成のCCDアレイによって構成される。センサ503は、反射光強度の光電変換により、R、G、Bのアナログ画像信号を生成し、さらにR、G、Bのディジタル画像信号に変換する。また、センサ503は、カラーイメージセンサーに限らず、赤外線特性、または紫外線特性などを検知するセンサを備える構成であってもよい。
【0047】
深度検出部504は、センサ503の読取位置における紙葉類1の深度を検出する。深度は、センサ503の読取位置における紙葉類1の面とセンサ503との距離を示す。深度検出部504は、この深度の変化(変位)を検出する。
【0048】
深度検出部504は、例えば、三角測量を応用したレーザー式変位センサを備える。さらに、深度検出部504は、2次元レーザー式変位センサを備える構成であってもよい。この場合、深度検出部504は、センサ503の読取位置における紙葉類1の深度を走査方向にラインで取得することができる。即ち、深度検出部504は、センサ503の1ライン分の紙葉類1の深度を検出することが出来る。
【0049】
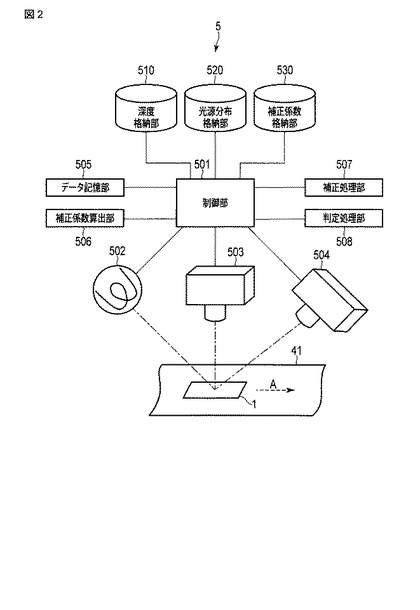
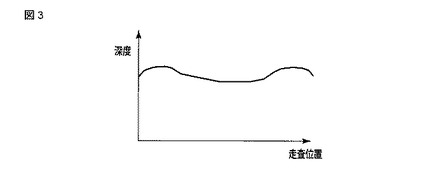
図3は、深度検出部504により検出されたセンサ503の1ライン分の紙葉類1の深度の例を示す。図3により示されるように、深度検出部504は、走査位置に対応する紙葉類1の深度を検出することができる。
【0050】
さらに、深度検出部504は、走査位置に対応する紙葉類1の深度を連続して検出することにより、センサ503の読取位置における紙葉類1の深度を紙葉類1の全体に亘って検出することができる。
【0051】
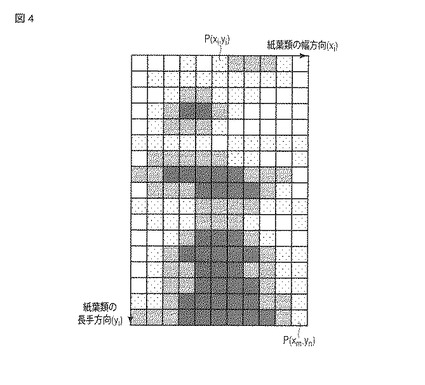
図4は、紙葉類1の全体の深度の例を示す。図4の横軸は、紙葉類1の幅方向を示す。また、図4の縦軸は、紙葉類1の長手方向を示す。なお、紙葉類1がスキューしていない場合、紙葉類1の幅方向は、センサ503の走査方向と等しい。また、紙葉類1がスキューしていない場合、紙葉類1の長手方向は、紙葉類1の搬送方向aと等しい。図4の各セルのハッチングは、それぞれ検出された深度を示す。ハッチングが濃いほど深度の値が高いことを示す。
【0052】
例えば、深度検出部504は、センサ503の分解能に応じて紙葉類1の深度を検出する。即ち、深度検出部504は、センサ503により検出される画像の各画素毎に紙葉類1の深度を検出する。なお、深度検出部504は、センサ503により検出される画像の複数の画素を含む領域毎に紙葉類1の深度を検出する構成であってもよい。即ち、深度検出部504は、紙葉類1が搬送される搬送面上の所定の領域毎に紙葉類1の深度を検出する。
【0053】
図4により示される例によると、センサ503は、1ラインでm個の画素を検出する。画素毎に紙葉類1の深度を検出する場合、深度検出部504は、センサ503の1ラインに相当するm個の深度を検出する。
【0054】
さらに、センサ503は、n回連続して画像を検出する。これにより、センサ503は、n×mピクセルの画像を取得する。なお、あるライン上におけるi番目の列(縦列)をxiとし、i番目のライン(横列)をyiとした場合、iライン上のi番目の画素をP(xi,yi)と表す。
【0055】
深度検出部504は、走査位置に対応する紙葉類1の深度を連続して検出することにより、紙葉類1の深度を紙葉類1の全体に亘って検出することができる。画素毎に深度を検出する場合、深度検出部504は、各画素P(xi,yi)に対応する深度をそれぞれ検出する。
【0056】
図2に示されるデータ記憶部505は、センサ503により検出された紙葉類1の画像を一時的に記憶する。
補正係数算出部506は、深度と、光源分布格納部520により格納されている分布情報とに基づいて、紙葉類1の画像に対する補正に用いる補正係数を算出する。
【0057】
補正処理部507は、補正係数算出部506により算出された補正係数により紙葉類1の画像を補正する。例えば、補正処理部507は、補正係数を紙葉類1の画像に乗算する。
【0058】
判定処理部508は、補正処理部507により補正された紙葉類1の画像に基づいて、紙葉類1に対する判定処理を行う。上記したように、判定処理部508は、紙葉類1の券種、額面、正損、及び真偽などを判定する。この為に、判定処理部508は、これらの判定を行う為のパラメータを有する辞書を備える。判定処理部508は、辞書のパラメータと、補正された紙葉類1の画像とに基づいて、紙葉類1の券種、額面、正損、及び真偽などを判定する。またさらに、判定処理部508は、補正された紙葉類1の画像に対して文字認識を行い、紙葉類1の記番号を検出する。
【0059】
深度格納部510は、紙葉類1の深度のプリセット値を記憶する。紙葉類1の搬送ばたつきは、搬送ベルトの位置、及び搬送速度などに応じて偏りが生じる、そこで、深度格納部510は、サンプルとしての複数の紙葉類1から検出された深度に基づいてプリセット値を算出し、算出したプリセット値を格納する。例えば、深度格納部510は、複数の紙葉類1から検出された深度の平均、中間値、または他の方法により深度のプリセット値を算出する。この深度のプリセット値を用いて補正を行うことにより、検査部5は、紙葉類1の搬送ばたつきの影響を抑えることができる。
【0060】
なお、複数の紙葉類処理装置100間で紙葉類1の搬送時の深度の差が小さい場合、深度格納部510が格納する深度のプリセット値は、複数の紙葉類処理装置100において共通であってもよい。また、複数の紙葉類処理装置100の間で、紙葉類1の搬送時の深度の差が大きい場合、紙葉類処理装置100毎に予め深度のプリセット値を算出し、算出したプリセット値を深度格納部510に格納する。
【0061】
また、深度格納部510は、センサ503の1ラインに相当する深度のプリセット値を格納する。さらに、深度格納部510は、紙葉類1の全体に亘る深度のプリセット値を格納する構成であってもよい。
【0062】
光源分布格納部520は、センサ503の読取位置における深度方向の明るさの分布情報を格納する。即ち、光源分布格納部520は、センサ503の撮像光軸方向における照明部502からの光の照度の分布(照度分布)を示す情報を格納する。
【0063】
照明部502から放射されて紙葉類1により反射された反射光は、紙葉類1の表面から放射状に広がる。この為、反射光は、紙葉類1とセンサ503との距離(深度)に応じて反射光の強さ(光度)が減衰する。光源分布格納部520は、所定の深度毎の明るさの低下率をプリセット値として記憶する。
【0064】
所定の深度毎の明るさの低下率は、深度が変更された場合の明るさの変化を予めセンサ503により計測し、基準となる深度(基準深度)における明るさとの比に応じて算出される。即ち、紙葉類1が基準深度に存在する場合にセンサ503により検出される明るさと、ある深度に紙葉類1が存在する場合にセンサ503により検出された明るさとの比を低下率として算出する。
【0065】
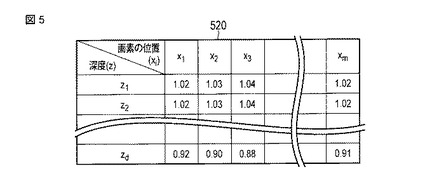
図5は、光源分布格納部520により格納されている明るさの分布情報の例を示す。光源分布格納部520は、センサ503の1ライン上における画素の位置と、深度と明るさの低下率を対応付けて記憶する。なお、光源分布格納部520は、画素毎ではなく、センサ503の1ライン上の所定の領域毎に、深度と明るさの低下率を対応付けて記憶する構成であってもよい。
【0066】
補正係数算出部506は、光源分布格納部520により格納されている明るさの低下率と深度とに基づいて補正係数を算出する。即ち、補正係数算出部506は、深度に基づいて光源分布格納部520を参照することにより、この深度における明るさの低下率を特定する。
【0067】
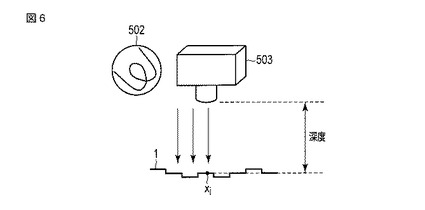
なお、ここでは、図6に示すように、照明部502からの光が紙葉類1の表面に対して垂直に入射することを仮定する。この場合、紙葉類1の表面における反射率は一定である。この為、上記したように、補正係数算出部506は、深度方向の変位値に応じた明るさの低下率に基づいて補正係数を算出することができる。
【0068】
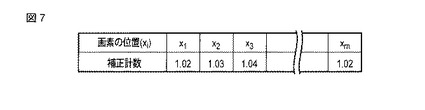
例えば、センサ503の1ライン上の所定の領域毎の深度に基づいて補正係数を算出する場合、補正係数算出部506は、深度に基づいて明るさの低下率を各領域毎に特定する。補正係数算出部506は、特定した明るさの低下率を補正係数として各領域毎に算出する。これにより、補正係数算出部506は、図7に示すように、センサ503の各画素の位置に対応する補正係数をそれぞれ算出することができる。
【0069】
補正処理部507は、補正係数算出部506により算出された補正係数により紙葉類1の画像を補正する。例えば、補正処理部507は、補正係数を紙葉類1の画像の画素の値に乗算する。
【0070】
なお、補正係数算出部506は、深度検出部504により検出された深度に基づいて明るさの低下率を特定する。また、補正係数算出部506は、深度格納部510により格納されている深度のプリセット値に基づいて明るさの低下率を特定する構成であってもよい。なお、深度のプリセット値を用いる場合、検査部5は、深度検出部504の構成を省いてもよい。
【0071】
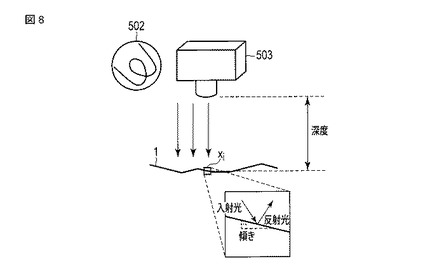
また、図8に示すように、照明部502からの光に対して紙葉類1の表面がそれぞれ傾きを有していることを仮定する。この傾きは、照明部502と、センサ503とに対する紙葉類1の表面の傾きを示す。紙葉類1の表面がそれぞれ傾きを有する場合、紙葉類1の表面における光の反射率(センサ503への入射光量)は傾きに応じて異なる。この為、補正係数算出部506は、深度方向の変位値に応じた明るさの低下率と、紙葉類1の表面の傾きと、に基づいて補正係数を算出することができる。
【0072】
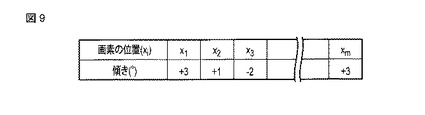
この場合、深度検出部504は、2次元レーザー式変位センサなどにより、センサ503の読取位置における深度方向の変位値をセンサ503の走査方向にラインで検出する。これにより、深度検出部504は、紙葉類1表面の形状を検出することができる。この結果、補正係数算出部506は、図9に示すように、紙葉類1の傾きを認識することができる。
【0073】
また、補正係数算出部506は、ライン状に検出された深度に基づいて、紙葉類1の傾きを推定する構成であってもよい。例えば、補正係数算出部506は、隣り合う領域から検出された深度の差と、この領域のサイズとに基づいて、傾きを算出する構成であってもよい。これにより、補正係数算出部506は、紙葉類1上の各領域における垂直方向への光の反射率を推定することができる。
【0074】
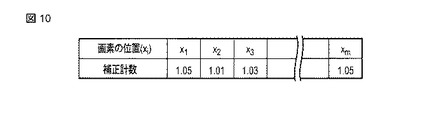
補正係数算出部506は、この反射率と、明るさの低下率とに基づいて補正係数を算出する構成であってもよい。例えば、補正係数算出部506は、反射率と、明るさの低下率とを乗算することにより、図10に示すように、センサ503の各画素の位置に対応する補正係数をそれぞれ算出することができる。補正処理部507は、補正係数算出部506により算出された補正係数を紙葉類1の画像の画素の値に乗算する。これにより補正値が算出される。
【0075】
補正係数格納部530は、上記の処理により算出された補正係数を格納する。また、補正係数格納部530は、格納している補正係数を補正処理部507に供給する。
【0076】
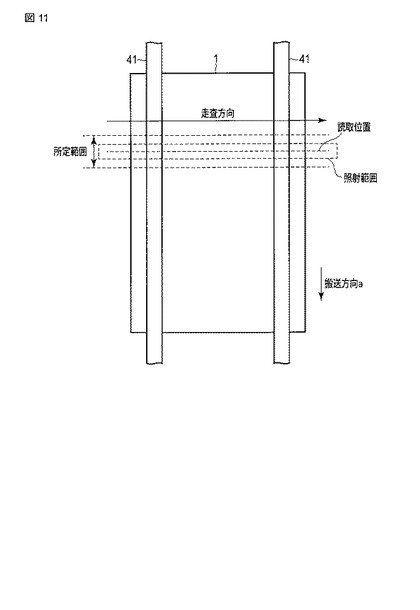
図11は、照明部502、センサ503、及び深度検出部504の配置位置の例を示す。なお、照明部502の照明範囲、センサ503の読取位置、及び深度検出部504により深度が検出される位置(深度検出位置)は、全て一致することが望ましいが、実際の装置構成上困難な場合がある。そこで、センサ503の読取位置から所定の範囲内に照明部502の照明範囲及び深度検出位置が形成されるようにセンサ503及び深度検出部504が配置される構成であってもよい。
【0077】
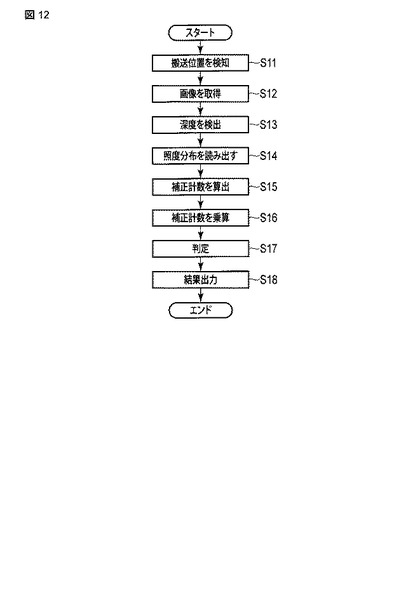
図12は、図2に示す検査部5の処理の例を示す。
紙葉類処理装置100の制御部8は、図1に示す搬送状態検知部4、または図示しない位置検出センサを用いて紙葉類1の搬送位置を検知する(ステップS11)。制御部8は、搬送状態検知部4、または位置検出センサの検知位置に紙葉類1が存在しない場合の検出信号と、紙葉類1が存在する場合の検出信号とのレベル差に基づいて、紙葉類1の搬送位置を認識する。
【0078】
制御部8は、図2に示すセンサ503の検出位置に紙葉類1が到達するタイミングでセンサ503により紙葉類1から画像を取得するように検査部5を制御する(ステップS12)。センサ503は、制御に基づいて逐次画像を検出する。これにより、センサ503は、紙葉類1の全体の画像を取得ことができる。
【0079】
深度検出部504は、センサ503の読取位置における紙葉類1の深度を検出する(ステップS13)。深度検出部504は、センサ503の各画素に対応する領域毎に紙葉類1の深度を検出する構成であってもよいし、所定の領域毎に紙葉類1の深度を検出する構成であってもよい。深度検出部504は、センサ503の各ライン毎に紙葉類1の深度を検出することにより、紙葉類1の全体に亘る深度を検出することができる。
【0080】
補正係数算出部506は、光源分布格納部520により格納されている明るさの低下率を示す照度分布を読み出す(ステップS14)。補正係数算出部506は、明るさの低下率と、深度検出部504により検出された深度とに基づいて、補正係数を算出する(ステップS15)。なお、補正係数算出部506は、深度検出部504は、センサ503の各画素毎に補正係数を算出する構成であってもよいし、所定の領域毎に補正係数を算出する構成であってもよい。
【0081】
補正処理部507は、補正係数算出部506により算出された補正係数により紙葉類1の画像を補正する(ステップS16)。例えば、補正処理部507は、補正係数を紙葉類1の画像に乗算する。各画素毎に補正係数が算出された場合、補正処理部507は、各補正係数を対応する画素の値に乗算する。また、領域毎に補正係数が算出された場合、補正処理部507は、各画素に対応する領域の補正係数を画素の値に乗算する。これにより補正された紙葉類1の画像(補正値)が算出される。
【0082】
判定処理部508は、補正処理部507により補正された紙葉類1の画像に基づいて、紙葉類1に対する判定処理を行う(ステップS17)。上記したように、判定処理部508は、辞書のパラメータと、補正された紙葉類1の画像とに基づいて、紙葉類1の券種、額面、正損、及び真偽などを判定する。
【0083】
制御部501は、判定処理部508による判定結果を制御部8に送信する(ステップS18)。制御部8は、判定処理部508の判定結果、及び他のモジュールの処理結果に基づいて、紙葉類1の搬送先を総合して判断する。
【0084】
なお、上記のステップS15において、補正係数算出部506は、照度分布と、深度検出部504により検出された深度とに基づいて補正係数を算出すると説明したが、この構成に限定されない。補正係数算出部506は、深度格納部510により格納されている紙葉類1の深度のプリセット値と上記の照度分布とに基づいて補正係数を算出する構成であってもよい。この場合、深度検出部504の構成を省くことができる。
【0085】
このような構成により、紙葉類処理装置100は、紙葉類1に搬送バタツキが生じる場合であっても、紙葉類1のバタツキの度合いに応じた補正を行うことにより、より精度の高い紙葉類1の画像を取得することができる。即ち、紙葉類処理装置100は、搬送ばたつきによる影響を軽減することができる。この結果、より高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供することができる。
【0086】
また、上記の紙葉類処理装置100の検査部5は、補正係数算出部506により逐次補正係数を算出する構成として説明したが、この構成に限定されない。検査部5は、予め算出された補正係数を格納する補正係数格納部を備える構成であってもよい。
【0087】
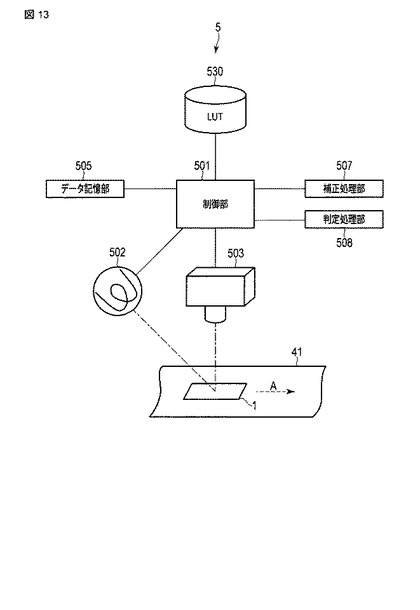
図13は、検査部5の画像読取部に相当する構成の他の例を示す。なお、図2に示した構成と同じ構成には、同じ参照符号を付し、詳細な説明を省略する。
検査部5は、制御部501、照明部502、センサ503、データ記憶部505、補正処理部507、判定処理部508、及び補正係数格納部530を備える。
【0088】
補正係数格納部530は、補正係数を格納する。なお、補正係数格納部530は、予め算出された補正係数を格納する構成であってもよい。例えば、補正係数格納部530は、図6により示された処理、または図8により示された処理によって算出された補正係数を格納する。即ち、補正係数格納部530は、図7により示された補正係数、または図10により示された補正係数を格納する。また、補正係数格納部530は、震度格納部510により格納されている深度のプリセット値と、光源分布格納部520により格納されている照度分布とに基づいて算出された補正係数を格納する構成であってもよい。
【0089】
なお、補正係数格納部530は、サンプルとしての複数の紙葉類1から検出された深度、及び紙葉類1の傾きに基づいて算出された補正係数からプリセット値を算出し、格納する構成であってもよい。この場合、例えば、補正係数格納部530は、複数の紙葉類1に基づいて算出された補正係数の平均、中間値、または他の方法により補正係数のプリセット値を算出する。この補正係数のプリセット値を用いて補正を行うことにより、検査部5は、紙葉類1の搬送ばたつきの影響を抑えることができる。
【0090】
なお、複数の紙葉類処理装置100間で紙葉類1の搬送時の深度及び傾きの差が小さい場合、補正係数格納部530が格納する補正係数のプリセット値は、複数の紙葉類処理装置100において共通であってもよい。また、複数の紙葉類処理装置100の間で、紙葉類1の搬送時の深度及び傾きの差が大きい場合、紙葉類処理装置100毎に予め補正係数のプリセット値を算出し、算出したプリセット値を補正係数格納部530に格納する。
【0091】
また、補正係数格納部530は、センサ503の1ラインに相当する補正係数のプリセット値を格納する。さらに、補正係数格納部530は、紙葉類1の全体に亘る補正係数のプリセット値を格納する構成であってもよい。
【0092】
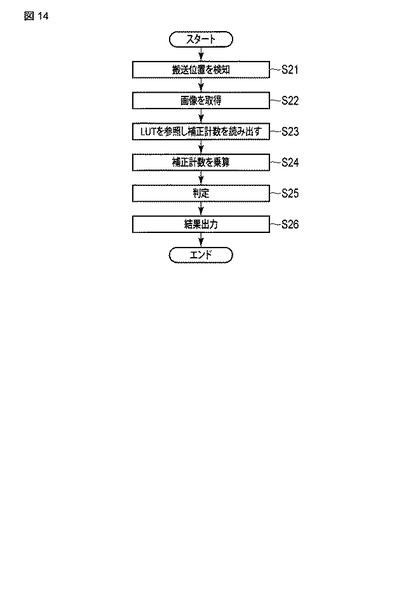
図14は、図13に示す検査部5の処理の例を示す。
紙葉類処理装置100の制御部8は、図1に示す搬送状態検知部4、または図示しない位置検出センサを用いて紙葉類1の搬送位置を検知する(ステップS21)。
【0093】
制御部8は、図13に示すセンサ503の検出位置に紙葉類1が到達するタイミングでセンサ503により紙葉類1から画像を取得するように検査部5を制御する(ステップS22)。
【0094】
補正処理部507は、センサ503の読取位置に応じた補正係数を補正係数格納部530から読み出す(ステップS23)。さらに、補正処理部507は、読み出した補正係数により紙葉類1の画像を補正する(ステップS24)。
【0095】
判定処理部508は、補正処理部507により補正された紙葉類1の画像に基づいて、紙葉類1に対する判定処理を行う(ステップS25)。上記したように、判定処理部508は、辞書のパラメータと、補正された紙葉類1の画像とに基づいて、紙葉類1の券種、額面、正損、及び真偽などを判定する。
【0096】
制御部501は、判定処理部508による判定結果を制御部8に送信する(ステップS26)。制御部8は、判定処理部508の判定結果、及び他のモジュールの処理結果に基づいて、紙葉類1の搬送先を総合して判断する。
【0097】
上記したように、紙葉類処理装置100は、センサ503の読取位置に応じて予め算出された補正係数を格納し、この補正係数を用いて紙葉類1のバタツキの度合いに応じた補正を行うことができる。これにより、簡易な構成でより精度の高い紙葉類1の画像を取得することができる。即ち、紙葉類処理装置100は、簡易な構成で搬送ばたつきによる影響を軽減することができる。この結果、簡易な構成でより高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供することができる。
【0098】
なお、上記の実施形態では、検査部5は、照明部502、センサ503、及び深度検出部504をそれぞれ1つずつ備えるとして説明したが、この構成に限定されない。検査部5は、複数の照明部502、センサ503、及び深度検出部504を備える構成であってもよい。例えば、検査部5は、紙葉類1の他方の面の画像を取得することができるように配置された照明部、センサ、及び深度検出部をさらに備える。照明部、センサ、及び深度検出部は、紙葉類1が搬送される搬送部41を挟んで照明部502、センサ503、及び深度検出部504と対向する位置に設けられる。
【0099】
また、図2により示される検査部5が補正係数格納部530を備える構成であってもよい。この場合、補正処理部507は、補正係数算出部506により逐次算出された補正係数と、補正係数格納部530により格納されている補正係数とのいずれかを選択し、補正処理に用いる。なお、補正処理部507がどちらの補正係数を選択するかは、操作部83による操作入力によって決定されてもよいし、予め設定されていてもよい。
【0100】
なお、上述の各実施の形態で説明した機能は、ハードウエアを用いて構成するに留まらず、ソフトウエアを用いて各機能を記載したプログラムをコンピュータに読み込ませて実現することもできる。また、各機能は、適宜ソフトウエア、ハードウエアのいずれかを選択して構成するものであっても良い。
【0101】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0102】
1…紙葉類、2…供給部、3…込み部、4…搬送状態検知部、5…検査部、6…検知部、7…集積部、8…制御部、9…排除券集積部、41…搬送部、51…真偽検知部、52…正損検知部、53…券種検知部、54…記番号検知部、71…正券集積部、72…損券集積部、81…主制御部、82…総合判定部、83…操作部、100…紙葉類処理装置、501…制御部、502…照明部、503…センサ、504…深度検出部、505…データ記憶部、506…補正係数算出部、507…補正処理部、508…判定処理部、510…深度格納部、520…光源分布格納部、530…補正係数格納部。
【技術分野】
【0001】
本発明の実施形態は、紙葉類処理装置、及び紙葉類処理方法に関する。
【背景技術】
【0002】
従来、種々の紙葉類の検査を行う紙葉類処理装置が実用化されている。紙葉類処理装置は、紙葉類の画像を読み取る画像読取装置を有する。紙葉類処理装置は、投入部に投入された紙葉類を1枚ずつ取り込み、検査部に搬送する。
【0003】
検査部は、紙葉類の特徴を検知する検知部を備える。検査部は、検知部により所定の方向に搬送される紙葉類から特徴量を検知する。例えば、検査部は、検知結果に基づいて紙葉類の券種(category)、額面(denomination)、及び方向(direction)を判定する。また、例えば、検査部は、検知結果に基づいて紙葉類の正損(Fitness)を判定する。また、例えば、検査部は、検知結果に基づいて紙葉類の真偽(authentication)を判定する。
【0004】
検査部は、例えば、紙葉類の画像を取得し、取得した紙葉類の画像と、予め設定されたパラメータとを比較し、比較結果に基づいて紙葉類の検査する紙葉類の券種、正損、及び真偽などを検知する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4505053号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記したような紙葉類処理装置は、紙葉類を高速で搬送させる。検査部は、高速で搬送されている紙葉類に対して光源により光を照射する。検査部は、紙葉類が搬送される搬送路に対して光源と同じ側に設置されたセンサにより紙葉類からの反射光を電気信号に変換し、紙葉類の画像を取得する。
【0007】
高速で搬送されている紙葉類は、例えばばたつきなどの変位が生じる場合がある。また、光源から出力される光は、光源からの距離に応じた配光傾斜(分布)を有する。この為、紙葉類に変位が生じた場合、光源の配光傾斜の影響を受ける可能性がある。これにより、紙葉類の画像に影響を与える可能性がある。
【0008】
そこで、より高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
一実施形態に係る紙葉類処理装置は、紙葉類を搬送する搬送手段と、搬送される前記紙葉類に対して光を照射する照明手段と、前記紙葉類から画像を取得する画像取得手段と、搬送される前記紙葉類の深度と前記照明手段から放射される光の照度分布とに基づいて予め算出される補正係数を格納する補正係数格納手段と、前記補正係数により、前記画像取得手段により取得された前記画像を補正する補正処理手段と、を具備する。
【図面の簡単な説明】
【0010】
【図1】図1は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図2】図2は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図3】図3は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図4】図4は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図5】図5は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図6】図6は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図7】図7は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図8】図8は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図9】図9は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図10】図10は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図11】図11は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図12】図12は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図13】図13は、一実施形態に係る紙葉類処理装置について説明するための図である。
【図14】図14は、一実施形態に係る紙葉類処理装置について説明するための図である。
【発明を実施するための形態】
【0011】
以下、図面を参照しながら、一実施形態に係る紙葉類処理装置、及び紙葉類処理方法について詳細に説明する。
【0012】
図1は、一実施形態に係る紙葉類処理装置100の構成例について説明するための説明図である。
紙葉類処理装置100は、操作員の操作に基づいて、紙葉類1の検査を行う。紙葉類処理装置100は、検査を行った紙葉類1を集積部により集積及び/又は施封する。
【0013】
紙葉類処理装置100は、供給部2、取り込み部3、搬送状態検知部4、検査部5、厚さ検知部6、集積部7、制御部8、排除券集積部9、及び搬送部41を備える。さらに、紙葉類処理装置100は、紙葉類1の搬送先を切り替える為の第1のゲートG1及び第2のゲートG2を備える。
【0014】
供給部2は、紙葉類処理装置100に取り込む紙葉類1をストックする。供給部2は、重ねられた状態の紙葉類1をまとめて受け入れる装填口を備える。
【0015】
取り込み部3は、分離ローラを備える。分離ローラは、供給部2の上端に設置される。供給部2に紙葉類1が投入される場合、分離ローラは、投入された紙葉類1の集積方向の上端に接する。分離ローラは、回転することにより、供給部2に装填される紙葉類1を集積方向の上端から1枚ずつ紙葉類処理装置100の内部に取り込む。
【0016】
分離ローラは、たとえば、1回転するごとに1枚の紙葉類1を取り込む。これにより、分離ローラは、紙葉類1を一定の間隔で取り込む。分離ローラにより取り込まれた紙葉類1は、搬送部41に導入される。
【0017】
搬送部41は、紙葉類1を紙葉類処理装置100内の各部に搬送する搬送部である。搬送部41は、図示しない搬送ベルト及び図示しない駆動プーリなどを備える。搬送部41は、図示しない駆動モータにより駆動プーリを駆動する。搬送ベルトは、駆動プーリにより動作する。
【0018】
搬送部41は、取り込み部3の分離ローラにより取り込まれる紙葉類1を搬送ベルトにより一定速度で搬送する。なお、搬送部41において取り込み部3に近い側を上流側、逆側を下流側として説明する。
【0019】
搬送状態検知部4は、搬送部41により搬送される紙葉類1の搬送状態を検知する。搬送状態検知部4は、搬送路上における紙葉類1の位置、スキュー量、及び搬送ギャップなどを検知する。
【0020】
例えば、搬送状態検知部4は、紙葉類1の中心を特定し、特定した中心からのズレを計測することにより、搬送ズレを検知する。また、例えば、搬送状態検知部4は、紙葉類1の搬送方向に対する傾きを計測することにより、スキュー量を検知する。また、例えば、搬送状態検知部4は、紙葉類1の搬送方向における後端と、次に搬送される紙葉類1の搬送方向における先端との距離を測定することにより、搬送ギャップを検知する。
【0021】
検査部5は、真偽検知部51、正損検知部52、券種検知部53、及び記番号検知部54を備える。
真偽検知部51は、紙葉類1が真券(genuine)であるか、偽券(counterfeit)であるかを検知する。真偽検知部51は、例えば紙葉類1の物理的特性(特徴)を検知する物理特性検知部、及び/または、磁気検知部などを備える。物理特性検知部は、例えば、紙葉類1から蛍光特性、または赤外線特性などを検知する。磁気検知部は、例えば、紙葉類1から磁気特性を検知する。真偽検知部51は、物理特性検知部、及び/または磁気検知部における検知結果に基づいて紙葉類1の真偽(authentication)を判定する。
【0022】
正損検知部52は、紙葉類1の正損(Fitness)を検知する。即ち、正損検知部52は、紙葉類1が再流通可能(recirculatable)な正券(fit sheet)であるか、再流通不可能(unrecirculatable)な損券(unfit sheet)であるかを検知する。例えば、正損検知部52は、紙葉類1の物理的特性を検知し、検知結果に基づいて、紙葉類1の正損を判定する。なお、正損検知部52は、真偽検知部51により真券であると判定された紙葉類1に対して正損を判定する。
【0023】
券種検知部53は、紙葉類1の券種(category)及び額面(denomination)を検知する。券種検知部53は、紙葉類1の両面から光学的特徴(画像)を検知する。また、券種検知部53は、紙葉類1の券種を判定する為の辞書を備える。
【0024】
券種検知部53は、紙葉類1から取得した画像に基づいて、特徴量(feature value)を抽出する。券種検知部53は、抽出した特徴量と、辞書に記憶されている券種毎のパラメータとの類似度を算出する。券種検知部53は、算出した類似度と、予め設定される閾値とに基づいて、紙葉類1の券種を検知する。さらに、券種検知部53は、紙葉類1の表/裏、正向き/逆向きを検知する。なお、以下、紙葉類1の表裏、及び正逆をまとめて券種と称する。
【0025】
記番号検知部54は、紙葉類1に記載されている記番号を検知する。記番号検知部54は、紙葉類1から画像を取得し、取得した画像中の記番号を文字認識を検知することにより、紙葉類1の記番号を取得する。
【0026】
なお、検査部5は、真偽検知部51、正損検知部52、券種検知部53、及び記番号検知部54の処理に用いられる紙葉類1の画像を取得する画像取得部を有する。なお、画像取得部の構成については後述する。
【0027】
厚さ検知部6は、搬送部41により搬送される紙葉類1の厚さを検知する。厚さ検知部6は、紙葉類1の厚さに基づいて、紙葉類1が複数枚重なっている旨、及び紙葉類1の折れなどを検知する。
【0028】
集積部7は、紙葉類1を検査部5により検知する券種毎に区分して集積する。集積部7は、正券集積部71と損券集積部72とを備える。正券集積部71は、検査部5により真券であり、且つ正券であると判定された紙葉類1を集積する。さらに、正券集積部71は、集積した紙葉類1の枚数が所定枚数に達する場合、紙葉類1を所定枚数毎に施封する。損券集積部72は、検査部5により真券であり、且つ損券であると判定された紙葉類1を集積する。
【0029】
制御部8は、紙葉類処理装置100の各部の動作を統合的に制御する。制御部8は、主制御部81、総合判定部82、及び操作部83などを備える。主制御部81は、総合判定部82による判定結果に基づいて、搬送部41、第1のゲートG1、及び第2のゲートG2の動作を制御する。
【0030】
総合判定部82は、搬送状態検知部4、検査部5、及び厚さ検知部6の検知結果に基づいて、紙葉類1の搬送先を総合的に判定する。
【0031】
例えば、総合判定部82は、真偽検知部51により真券であると判定され、正損検知部52により正券であると判定された紙葉類1の搬送先を正券集積部71に決定する。主制御部81は、紙葉類1を正券集積部71に搬送するように第1のゲートG1及び第2のゲートG2を制御する。即ち、主制御部81は、第1のゲートG1を反時計回りに回動し、第2のゲートG2を時計回りに回動するように制御する。
【0032】
また、総合判定部82は、真偽検知部51により真券と判定され、正損検知部52により損券であると判定された紙葉類1の搬送先を損券集積部72に決定する。主制御部81は、紙葉類1を損券集積部72に搬送するように第1のゲートG1及び第2のゲートG2を制御する。即ち、主制御部81は、第1のゲートG1を反時計回りに回動し、第2のゲートG2を反時計回りに回動するように制御する。
【0033】
またさらに、総合判定部82は、真偽検知部51により偽券、または排除券と判定された紙葉類1の搬送先を排除券集積部9に決定する。主制御部81は、紙葉類1を排除券集積部9に搬送するように第1のゲートG1を制御する。即ち、主制御部81は、第1のゲートG1を時計回りに回動するように制御する。
【0034】
またさらに、総合判定部82は、厚さ検知部6により紙葉類1が複数枚重なっている事、または、紙葉類1の折れを検知する場合、紙葉類1の搬送先を排除券集積部9に決定する。主制御部81は、紙葉類1を排除券集積部9に搬送するように第1のゲートG1を制御する。即ち、主制御部81は、第1のゲートG1を時計回りに回動するように制御する。
【0035】
操作部83は、例えばキーボード、表示部と一体に形成されるタッチパネル、または操作者による操作に応じた操作信号を受け付ける入力部などを備える。操作部83は、入力される操作に基づいて操作信号を生成する。操作部83は、生成した操作信号を主制御部81に入力する。主制御部81は、入力される操作信号に基づいて、種々の処理を実現する為の制御信号を生成する。
【0036】
排除券集積部9は、検査部5の真偽検知部51により偽券と判定された紙葉類1、厚さ検知部6により複数枚重なっていると判定された紙葉類1、及び、厚さ検知部6により折れが存在すると判定された紙葉類1を集積する。
【0037】
図2は、検査部5の画像読取部に相当する構成の例を示す。
検査部5は、制御部501、照明部502、センサ503、深度検出部504、データ記憶部505、補正係数算出部506、補正処理部507、判定処理部508、深度格納部510、光源分布格納部520、及び補正係数格納部530を備える。
【0038】
制御部501は、検査部5の各部の動作を制御する。制御部501は、CPU、バッファメモリ、プログラムメモリ、及び不揮発性メモリなどを備えている。
【0039】
CPUは、種々の演算処理を行う。バッファメモリは、CPUにより演算結果を一時的に記憶する。プログラムメモリ及び不揮発性メモリは、CPUが実行する種々のプログラム及び制御データなどを記憶する。
【0040】
制御部501は、CPUによりプログラムメモリに記憶されているプログラムを実行することにより、種々の処理を行うことができる。例えば、制御部501は、照明部502、センサ503、及び深度検出部504の動作タイミングを制御する。
【0041】
また、制御部501は、図1に示す制御部8に接続されている。例えば、制御部501は、処理結果を制御部8に伝送することができる。また、制御部501は、制御部8から送信される制御信号に基づいて、検査部5の各部の動作を制御することが出来る。
【0042】
照明部502は、搬送部41により矢印Aの方向(搬送方向)に搬送される紙葉類1に対して光を照射する。照明部502は、例えば、蛍光灯、ハロゲンランプ、またはLEDなどの光源と、光源から発せられた光をセンサ503の読取位置に導光する導光部材とを備える。即ち、照明部502は、前記503の読取位置を含む範囲に光を照射する。
【0043】
なお、照明部502は、センサ503の走査方向と平行に複数配列されたLED、またはセンサ503の走査方向と平行な直管型の蛍光灯などを備える構成であってもよい。また、照明部502は、センサ503を挟んで上流側と下流側とからセンサ503の読取位置に光を照射する構成であってもよい。またさらに、センサ503の読取光軸上に設けられたハーフミラーを導光部材として備える構成であってもよい。この場合、照明部502は、センサ503の読取位置に対して垂直方向から光を照射することが出来る。
【0044】
センサ503は、紙葉類1の一方の面から光度に応じた強度の電気信号を生成する。センサ503は、例えば、Charge Coupled Device(CCD)などの受光素子と、光学系とを備える。光学系は、所定の読取位置(走査範囲)から光を受光し、受光した光を受光素子に結像させる。この読取位置に紙葉類1が存在する場合、光学系は、紙葉類1の面で反射した反射光を受光し、受光素子に結像させる。受光素子は、結像された光に基づいて電気信号を生成する。受光素子は、例えば、カラーイメージセンサーがライン状に配設されたラインセンサーなどにより構成される。受光素子は、紙葉類1の搬送方向aと直交する方向に走査するように配置される。
【0045】
センサ503は、搬送部41によって搬送方向Aの方向に搬送される紙葉類1から連続して電気信号を生成することにより、紙葉類1の全体の二次元的な画像を取得する。
【0046】
なお、カラーイメージセンサーは、例えば、赤(R)、緑(G)、青(B)構成のCCDアレイによって構成される。センサ503は、反射光強度の光電変換により、R、G、Bのアナログ画像信号を生成し、さらにR、G、Bのディジタル画像信号に変換する。また、センサ503は、カラーイメージセンサーに限らず、赤外線特性、または紫外線特性などを検知するセンサを備える構成であってもよい。
【0047】
深度検出部504は、センサ503の読取位置における紙葉類1の深度を検出する。深度は、センサ503の読取位置における紙葉類1の面とセンサ503との距離を示す。深度検出部504は、この深度の変化(変位)を検出する。
【0048】
深度検出部504は、例えば、三角測量を応用したレーザー式変位センサを備える。さらに、深度検出部504は、2次元レーザー式変位センサを備える構成であってもよい。この場合、深度検出部504は、センサ503の読取位置における紙葉類1の深度を走査方向にラインで取得することができる。即ち、深度検出部504は、センサ503の1ライン分の紙葉類1の深度を検出することが出来る。
【0049】
図3は、深度検出部504により検出されたセンサ503の1ライン分の紙葉類1の深度の例を示す。図3により示されるように、深度検出部504は、走査位置に対応する紙葉類1の深度を検出することができる。
【0050】
さらに、深度検出部504は、走査位置に対応する紙葉類1の深度を連続して検出することにより、センサ503の読取位置における紙葉類1の深度を紙葉類1の全体に亘って検出することができる。
【0051】
図4は、紙葉類1の全体の深度の例を示す。図4の横軸は、紙葉類1の幅方向を示す。また、図4の縦軸は、紙葉類1の長手方向を示す。なお、紙葉類1がスキューしていない場合、紙葉類1の幅方向は、センサ503の走査方向と等しい。また、紙葉類1がスキューしていない場合、紙葉類1の長手方向は、紙葉類1の搬送方向aと等しい。図4の各セルのハッチングは、それぞれ検出された深度を示す。ハッチングが濃いほど深度の値が高いことを示す。
【0052】
例えば、深度検出部504は、センサ503の分解能に応じて紙葉類1の深度を検出する。即ち、深度検出部504は、センサ503により検出される画像の各画素毎に紙葉類1の深度を検出する。なお、深度検出部504は、センサ503により検出される画像の複数の画素を含む領域毎に紙葉類1の深度を検出する構成であってもよい。即ち、深度検出部504は、紙葉類1が搬送される搬送面上の所定の領域毎に紙葉類1の深度を検出する。
【0053】
図4により示される例によると、センサ503は、1ラインでm個の画素を検出する。画素毎に紙葉類1の深度を検出する場合、深度検出部504は、センサ503の1ラインに相当するm個の深度を検出する。
【0054】
さらに、センサ503は、n回連続して画像を検出する。これにより、センサ503は、n×mピクセルの画像を取得する。なお、あるライン上におけるi番目の列(縦列)をxiとし、i番目のライン(横列)をyiとした場合、iライン上のi番目の画素をP(xi,yi)と表す。
【0055】
深度検出部504は、走査位置に対応する紙葉類1の深度を連続して検出することにより、紙葉類1の深度を紙葉類1の全体に亘って検出することができる。画素毎に深度を検出する場合、深度検出部504は、各画素P(xi,yi)に対応する深度をそれぞれ検出する。
【0056】
図2に示されるデータ記憶部505は、センサ503により検出された紙葉類1の画像を一時的に記憶する。
補正係数算出部506は、深度と、光源分布格納部520により格納されている分布情報とに基づいて、紙葉類1の画像に対する補正に用いる補正係数を算出する。
【0057】
補正処理部507は、補正係数算出部506により算出された補正係数により紙葉類1の画像を補正する。例えば、補正処理部507は、補正係数を紙葉類1の画像に乗算する。
【0058】
判定処理部508は、補正処理部507により補正された紙葉類1の画像に基づいて、紙葉類1に対する判定処理を行う。上記したように、判定処理部508は、紙葉類1の券種、額面、正損、及び真偽などを判定する。この為に、判定処理部508は、これらの判定を行う為のパラメータを有する辞書を備える。判定処理部508は、辞書のパラメータと、補正された紙葉類1の画像とに基づいて、紙葉類1の券種、額面、正損、及び真偽などを判定する。またさらに、判定処理部508は、補正された紙葉類1の画像に対して文字認識を行い、紙葉類1の記番号を検出する。
【0059】
深度格納部510は、紙葉類1の深度のプリセット値を記憶する。紙葉類1の搬送ばたつきは、搬送ベルトの位置、及び搬送速度などに応じて偏りが生じる、そこで、深度格納部510は、サンプルとしての複数の紙葉類1から検出された深度に基づいてプリセット値を算出し、算出したプリセット値を格納する。例えば、深度格納部510は、複数の紙葉類1から検出された深度の平均、中間値、または他の方法により深度のプリセット値を算出する。この深度のプリセット値を用いて補正を行うことにより、検査部5は、紙葉類1の搬送ばたつきの影響を抑えることができる。
【0060】
なお、複数の紙葉類処理装置100間で紙葉類1の搬送時の深度の差が小さい場合、深度格納部510が格納する深度のプリセット値は、複数の紙葉類処理装置100において共通であってもよい。また、複数の紙葉類処理装置100の間で、紙葉類1の搬送時の深度の差が大きい場合、紙葉類処理装置100毎に予め深度のプリセット値を算出し、算出したプリセット値を深度格納部510に格納する。
【0061】
また、深度格納部510は、センサ503の1ラインに相当する深度のプリセット値を格納する。さらに、深度格納部510は、紙葉類1の全体に亘る深度のプリセット値を格納する構成であってもよい。
【0062】
光源分布格納部520は、センサ503の読取位置における深度方向の明るさの分布情報を格納する。即ち、光源分布格納部520は、センサ503の撮像光軸方向における照明部502からの光の照度の分布(照度分布)を示す情報を格納する。
【0063】
照明部502から放射されて紙葉類1により反射された反射光は、紙葉類1の表面から放射状に広がる。この為、反射光は、紙葉類1とセンサ503との距離(深度)に応じて反射光の強さ(光度)が減衰する。光源分布格納部520は、所定の深度毎の明るさの低下率をプリセット値として記憶する。
【0064】
所定の深度毎の明るさの低下率は、深度が変更された場合の明るさの変化を予めセンサ503により計測し、基準となる深度(基準深度)における明るさとの比に応じて算出される。即ち、紙葉類1が基準深度に存在する場合にセンサ503により検出される明るさと、ある深度に紙葉類1が存在する場合にセンサ503により検出された明るさとの比を低下率として算出する。
【0065】
図5は、光源分布格納部520により格納されている明るさの分布情報の例を示す。光源分布格納部520は、センサ503の1ライン上における画素の位置と、深度と明るさの低下率を対応付けて記憶する。なお、光源分布格納部520は、画素毎ではなく、センサ503の1ライン上の所定の領域毎に、深度と明るさの低下率を対応付けて記憶する構成であってもよい。
【0066】
補正係数算出部506は、光源分布格納部520により格納されている明るさの低下率と深度とに基づいて補正係数を算出する。即ち、補正係数算出部506は、深度に基づいて光源分布格納部520を参照することにより、この深度における明るさの低下率を特定する。
【0067】
なお、ここでは、図6に示すように、照明部502からの光が紙葉類1の表面に対して垂直に入射することを仮定する。この場合、紙葉類1の表面における反射率は一定である。この為、上記したように、補正係数算出部506は、深度方向の変位値に応じた明るさの低下率に基づいて補正係数を算出することができる。
【0068】
例えば、センサ503の1ライン上の所定の領域毎の深度に基づいて補正係数を算出する場合、補正係数算出部506は、深度に基づいて明るさの低下率を各領域毎に特定する。補正係数算出部506は、特定した明るさの低下率を補正係数として各領域毎に算出する。これにより、補正係数算出部506は、図7に示すように、センサ503の各画素の位置に対応する補正係数をそれぞれ算出することができる。
【0069】
補正処理部507は、補正係数算出部506により算出された補正係数により紙葉類1の画像を補正する。例えば、補正処理部507は、補正係数を紙葉類1の画像の画素の値に乗算する。
【0070】
なお、補正係数算出部506は、深度検出部504により検出された深度に基づいて明るさの低下率を特定する。また、補正係数算出部506は、深度格納部510により格納されている深度のプリセット値に基づいて明るさの低下率を特定する構成であってもよい。なお、深度のプリセット値を用いる場合、検査部5は、深度検出部504の構成を省いてもよい。
【0071】
また、図8に示すように、照明部502からの光に対して紙葉類1の表面がそれぞれ傾きを有していることを仮定する。この傾きは、照明部502と、センサ503とに対する紙葉類1の表面の傾きを示す。紙葉類1の表面がそれぞれ傾きを有する場合、紙葉類1の表面における光の反射率(センサ503への入射光量)は傾きに応じて異なる。この為、補正係数算出部506は、深度方向の変位値に応じた明るさの低下率と、紙葉類1の表面の傾きと、に基づいて補正係数を算出することができる。
【0072】
この場合、深度検出部504は、2次元レーザー式変位センサなどにより、センサ503の読取位置における深度方向の変位値をセンサ503の走査方向にラインで検出する。これにより、深度検出部504は、紙葉類1表面の形状を検出することができる。この結果、補正係数算出部506は、図9に示すように、紙葉類1の傾きを認識することができる。
【0073】
また、補正係数算出部506は、ライン状に検出された深度に基づいて、紙葉類1の傾きを推定する構成であってもよい。例えば、補正係数算出部506は、隣り合う領域から検出された深度の差と、この領域のサイズとに基づいて、傾きを算出する構成であってもよい。これにより、補正係数算出部506は、紙葉類1上の各領域における垂直方向への光の反射率を推定することができる。
【0074】
補正係数算出部506は、この反射率と、明るさの低下率とに基づいて補正係数を算出する構成であってもよい。例えば、補正係数算出部506は、反射率と、明るさの低下率とを乗算することにより、図10に示すように、センサ503の各画素の位置に対応する補正係数をそれぞれ算出することができる。補正処理部507は、補正係数算出部506により算出された補正係数を紙葉類1の画像の画素の値に乗算する。これにより補正値が算出される。
【0075】
補正係数格納部530は、上記の処理により算出された補正係数を格納する。また、補正係数格納部530は、格納している補正係数を補正処理部507に供給する。
【0076】
図11は、照明部502、センサ503、及び深度検出部504の配置位置の例を示す。なお、照明部502の照明範囲、センサ503の読取位置、及び深度検出部504により深度が検出される位置(深度検出位置)は、全て一致することが望ましいが、実際の装置構成上困難な場合がある。そこで、センサ503の読取位置から所定の範囲内に照明部502の照明範囲及び深度検出位置が形成されるようにセンサ503及び深度検出部504が配置される構成であってもよい。
【0077】
図12は、図2に示す検査部5の処理の例を示す。
紙葉類処理装置100の制御部8は、図1に示す搬送状態検知部4、または図示しない位置検出センサを用いて紙葉類1の搬送位置を検知する(ステップS11)。制御部8は、搬送状態検知部4、または位置検出センサの検知位置に紙葉類1が存在しない場合の検出信号と、紙葉類1が存在する場合の検出信号とのレベル差に基づいて、紙葉類1の搬送位置を認識する。
【0078】
制御部8は、図2に示すセンサ503の検出位置に紙葉類1が到達するタイミングでセンサ503により紙葉類1から画像を取得するように検査部5を制御する(ステップS12)。センサ503は、制御に基づいて逐次画像を検出する。これにより、センサ503は、紙葉類1の全体の画像を取得ことができる。
【0079】
深度検出部504は、センサ503の読取位置における紙葉類1の深度を検出する(ステップS13)。深度検出部504は、センサ503の各画素に対応する領域毎に紙葉類1の深度を検出する構成であってもよいし、所定の領域毎に紙葉類1の深度を検出する構成であってもよい。深度検出部504は、センサ503の各ライン毎に紙葉類1の深度を検出することにより、紙葉類1の全体に亘る深度を検出することができる。
【0080】
補正係数算出部506は、光源分布格納部520により格納されている明るさの低下率を示す照度分布を読み出す(ステップS14)。補正係数算出部506は、明るさの低下率と、深度検出部504により検出された深度とに基づいて、補正係数を算出する(ステップS15)。なお、補正係数算出部506は、深度検出部504は、センサ503の各画素毎に補正係数を算出する構成であってもよいし、所定の領域毎に補正係数を算出する構成であってもよい。
【0081】
補正処理部507は、補正係数算出部506により算出された補正係数により紙葉類1の画像を補正する(ステップS16)。例えば、補正処理部507は、補正係数を紙葉類1の画像に乗算する。各画素毎に補正係数が算出された場合、補正処理部507は、各補正係数を対応する画素の値に乗算する。また、領域毎に補正係数が算出された場合、補正処理部507は、各画素に対応する領域の補正係数を画素の値に乗算する。これにより補正された紙葉類1の画像(補正値)が算出される。
【0082】
判定処理部508は、補正処理部507により補正された紙葉類1の画像に基づいて、紙葉類1に対する判定処理を行う(ステップS17)。上記したように、判定処理部508は、辞書のパラメータと、補正された紙葉類1の画像とに基づいて、紙葉類1の券種、額面、正損、及び真偽などを判定する。
【0083】
制御部501は、判定処理部508による判定結果を制御部8に送信する(ステップS18)。制御部8は、判定処理部508の判定結果、及び他のモジュールの処理結果に基づいて、紙葉類1の搬送先を総合して判断する。
【0084】
なお、上記のステップS15において、補正係数算出部506は、照度分布と、深度検出部504により検出された深度とに基づいて補正係数を算出すると説明したが、この構成に限定されない。補正係数算出部506は、深度格納部510により格納されている紙葉類1の深度のプリセット値と上記の照度分布とに基づいて補正係数を算出する構成であってもよい。この場合、深度検出部504の構成を省くことができる。
【0085】
このような構成により、紙葉類処理装置100は、紙葉類1に搬送バタツキが生じる場合であっても、紙葉類1のバタツキの度合いに応じた補正を行うことにより、より精度の高い紙葉類1の画像を取得することができる。即ち、紙葉類処理装置100は、搬送ばたつきによる影響を軽減することができる。この結果、より高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供することができる。
【0086】
また、上記の紙葉類処理装置100の検査部5は、補正係数算出部506により逐次補正係数を算出する構成として説明したが、この構成に限定されない。検査部5は、予め算出された補正係数を格納する補正係数格納部を備える構成であってもよい。
【0087】
図13は、検査部5の画像読取部に相当する構成の他の例を示す。なお、図2に示した構成と同じ構成には、同じ参照符号を付し、詳細な説明を省略する。
検査部5は、制御部501、照明部502、センサ503、データ記憶部505、補正処理部507、判定処理部508、及び補正係数格納部530を備える。
【0088】
補正係数格納部530は、補正係数を格納する。なお、補正係数格納部530は、予め算出された補正係数を格納する構成であってもよい。例えば、補正係数格納部530は、図6により示された処理、または図8により示された処理によって算出された補正係数を格納する。即ち、補正係数格納部530は、図7により示された補正係数、または図10により示された補正係数を格納する。また、補正係数格納部530は、震度格納部510により格納されている深度のプリセット値と、光源分布格納部520により格納されている照度分布とに基づいて算出された補正係数を格納する構成であってもよい。
【0089】
なお、補正係数格納部530は、サンプルとしての複数の紙葉類1から検出された深度、及び紙葉類1の傾きに基づいて算出された補正係数からプリセット値を算出し、格納する構成であってもよい。この場合、例えば、補正係数格納部530は、複数の紙葉類1に基づいて算出された補正係数の平均、中間値、または他の方法により補正係数のプリセット値を算出する。この補正係数のプリセット値を用いて補正を行うことにより、検査部5は、紙葉類1の搬送ばたつきの影響を抑えることができる。
【0090】
なお、複数の紙葉類処理装置100間で紙葉類1の搬送時の深度及び傾きの差が小さい場合、補正係数格納部530が格納する補正係数のプリセット値は、複数の紙葉類処理装置100において共通であってもよい。また、複数の紙葉類処理装置100の間で、紙葉類1の搬送時の深度及び傾きの差が大きい場合、紙葉類処理装置100毎に予め補正係数のプリセット値を算出し、算出したプリセット値を補正係数格納部530に格納する。
【0091】
また、補正係数格納部530は、センサ503の1ラインに相当する補正係数のプリセット値を格納する。さらに、補正係数格納部530は、紙葉類1の全体に亘る補正係数のプリセット値を格納する構成であってもよい。
【0092】
図14は、図13に示す検査部5の処理の例を示す。
紙葉類処理装置100の制御部8は、図1に示す搬送状態検知部4、または図示しない位置検出センサを用いて紙葉類1の搬送位置を検知する(ステップS21)。
【0093】
制御部8は、図13に示すセンサ503の検出位置に紙葉類1が到達するタイミングでセンサ503により紙葉類1から画像を取得するように検査部5を制御する(ステップS22)。
【0094】
補正処理部507は、センサ503の読取位置に応じた補正係数を補正係数格納部530から読み出す(ステップS23)。さらに、補正処理部507は、読み出した補正係数により紙葉類1の画像を補正する(ステップS24)。
【0095】
判定処理部508は、補正処理部507により補正された紙葉類1の画像に基づいて、紙葉類1に対する判定処理を行う(ステップS25)。上記したように、判定処理部508は、辞書のパラメータと、補正された紙葉類1の画像とに基づいて、紙葉類1の券種、額面、正損、及び真偽などを判定する。
【0096】
制御部501は、判定処理部508による判定結果を制御部8に送信する(ステップS26)。制御部8は、判定処理部508の判定結果、及び他のモジュールの処理結果に基づいて、紙葉類1の搬送先を総合して判断する。
【0097】
上記したように、紙葉類処理装置100は、センサ503の読取位置に応じて予め算出された補正係数を格納し、この補正係数を用いて紙葉類1のバタツキの度合いに応じた補正を行うことができる。これにより、簡易な構成でより精度の高い紙葉類1の画像を取得することができる。即ち、紙葉類処理装置100は、簡易な構成で搬送ばたつきによる影響を軽減することができる。この結果、簡易な構成でより高い精度で紙葉類を処理することが出来る紙葉類処理装置、及び紙葉類処理方法を提供することができる。
【0098】
なお、上記の実施形態では、検査部5は、照明部502、センサ503、及び深度検出部504をそれぞれ1つずつ備えるとして説明したが、この構成に限定されない。検査部5は、複数の照明部502、センサ503、及び深度検出部504を備える構成であってもよい。例えば、検査部5は、紙葉類1の他方の面の画像を取得することができるように配置された照明部、センサ、及び深度検出部をさらに備える。照明部、センサ、及び深度検出部は、紙葉類1が搬送される搬送部41を挟んで照明部502、センサ503、及び深度検出部504と対向する位置に設けられる。
【0099】
また、図2により示される検査部5が補正係数格納部530を備える構成であってもよい。この場合、補正処理部507は、補正係数算出部506により逐次算出された補正係数と、補正係数格納部530により格納されている補正係数とのいずれかを選択し、補正処理に用いる。なお、補正処理部507がどちらの補正係数を選択するかは、操作部83による操作入力によって決定されてもよいし、予め設定されていてもよい。
【0100】
なお、上述の各実施の形態で説明した機能は、ハードウエアを用いて構成するに留まらず、ソフトウエアを用いて各機能を記載したプログラムをコンピュータに読み込ませて実現することもできる。また、各機能は、適宜ソフトウエア、ハードウエアのいずれかを選択して構成するものであっても良い。
【0101】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0102】
1…紙葉類、2…供給部、3…込み部、4…搬送状態検知部、5…検査部、6…検知部、7…集積部、8…制御部、9…排除券集積部、41…搬送部、51…真偽検知部、52…正損検知部、53…券種検知部、54…記番号検知部、71…正券集積部、72…損券集積部、81…主制御部、82…総合判定部、83…操作部、100…紙葉類処理装置、501…制御部、502…照明部、503…センサ、504…深度検出部、505…データ記憶部、506…補正係数算出部、507…補正処理部、508…判定処理部、510…深度格納部、520…光源分布格納部、530…補正係数格納部。
【特許請求の範囲】
【請求項1】
紙葉類を搬送する搬送手段と、
搬送される前記紙葉類に対して光を照射する照明手段と、
前記紙葉類から画像を取得する画像取得手段と、
搬送される前記紙葉類の深度と前記照明手段から放射される光の照度分布とに基づいて予め算出される補正係数を格納する補正係数格納手段と、
前記補正係数により、前記画像取得手段により取得された前記画像を補正する補正処理手段と、
を具備する紙葉類処理装置。
【請求項2】
前記紙葉類の深度のプリセット値を予め格納する深度格納手段をさらに具備し、
前記補正係数格納手段は、前記深度のプリセット値と、前記照度分布とに基づいて算出された補正係数を格納する、
請求項1に記載の紙葉類処理装置。
【請求項3】
搬送される前記紙葉類の深度を検出する深度検出手段をさらに具備し、
前記補正係数格納手段は、前記深度検出手段により検出された前記紙葉類の深度と、前記照度分布とに基づいて算出された補正係数を格納する、
請求項1に記載の紙葉類処理装置。
【請求項4】
搬送される前記紙葉類の前記照明手段と前記画像取得手段とに対する傾きを検出する傾き検出手段をさらに具備し、
前記補正係数格納手段は、前記深度検出手段により検出された前記紙葉類の深度と、前記傾き検出手段により検出された前記傾きと、前記照度分布とに基づいて算出された補正係数を格納する、
請求項3に記載の紙葉類処理装置。
【請求項5】
前記照明手段は、前記画像取得手段の読取位置を含む範囲に光を照射し、
前記補正係数格納手段は、前記画像取得手段の読取位置から所定範囲内で検出された前記紙葉類の深度に基づいて算出された補正係数を格納する、
請求項1乃至4のいずれかに記載の紙葉類処理装置。
【請求項6】
前記補正処理手段により補正された前記画像に基づいて前記紙葉類に対する判定を行う判定手段と、
前記判定手段の判定結果に基づいて、前記紙葉類を区分する区分処理手段と、
をさらに具備する請求項1乃至5のいずれかに記載の紙葉類処理装置。
【請求項7】
紙葉類を搬送し、
搬送される前記紙葉類に対して光を照射し、
前記紙葉類から画像を取得し、
搬送される前記紙葉類の深度と前記紙葉類に照射される光の照度分布とに基づいて予め算出される補正係数を格納し、
前記補正係数により、取得された前記画像を補正する、
紙葉類処理方法。
【請求項1】
紙葉類を搬送する搬送手段と、
搬送される前記紙葉類に対して光を照射する照明手段と、
前記紙葉類から画像を取得する画像取得手段と、
搬送される前記紙葉類の深度と前記照明手段から放射される光の照度分布とに基づいて予め算出される補正係数を格納する補正係数格納手段と、
前記補正係数により、前記画像取得手段により取得された前記画像を補正する補正処理手段と、
を具備する紙葉類処理装置。
【請求項2】
前記紙葉類の深度のプリセット値を予め格納する深度格納手段をさらに具備し、
前記補正係数格納手段は、前記深度のプリセット値と、前記照度分布とに基づいて算出された補正係数を格納する、
請求項1に記載の紙葉類処理装置。
【請求項3】
搬送される前記紙葉類の深度を検出する深度検出手段をさらに具備し、
前記補正係数格納手段は、前記深度検出手段により検出された前記紙葉類の深度と、前記照度分布とに基づいて算出された補正係数を格納する、
請求項1に記載の紙葉類処理装置。
【請求項4】
搬送される前記紙葉類の前記照明手段と前記画像取得手段とに対する傾きを検出する傾き検出手段をさらに具備し、
前記補正係数格納手段は、前記深度検出手段により検出された前記紙葉類の深度と、前記傾き検出手段により検出された前記傾きと、前記照度分布とに基づいて算出された補正係数を格納する、
請求項3に記載の紙葉類処理装置。
【請求項5】
前記照明手段は、前記画像取得手段の読取位置を含む範囲に光を照射し、
前記補正係数格納手段は、前記画像取得手段の読取位置から所定範囲内で検出された前記紙葉類の深度に基づいて算出された補正係数を格納する、
請求項1乃至4のいずれかに記載の紙葉類処理装置。
【請求項6】
前記補正処理手段により補正された前記画像に基づいて前記紙葉類に対する判定を行う判定手段と、
前記判定手段の判定結果に基づいて、前記紙葉類を区分する区分処理手段と、
をさらに具備する請求項1乃至5のいずれかに記載の紙葉類処理装置。
【請求項7】
紙葉類を搬送し、
搬送される前記紙葉類に対して光を照射し、
前記紙葉類から画像を取得し、
搬送される前記紙葉類の深度と前記紙葉類に照射される光の照度分布とに基づいて予め算出される補正係数を格納し、
前記補正係数により、取得された前記画像を補正する、
紙葉類処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−61765(P2013−61765A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199277(P2011−199277)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]