
紙葉類処理装置
【課題】券長の長短に関わらず無駄時間が発生せず、また、様々な券長の紙葉類が処理される場合にも高い処理効率を発揮することができる紙葉類処理装置を提供することを目的とする。
【解決手段】取出装置10によって紙葉類間の間隔が一定(Lk)となるように取出された紙葉類を一定速度で搬送し、この搬送路の中途部分に当該紙葉類を検知する複数の搬送センサを配置し、紙葉類の搬送速度を算出する。この算出した搬送速度に基づき紙葉類の先端が羽根車に到達する迄の到達時間を算出する。一方、回転検知装置120は羽根車100の回転を検知し、羽根車100の各羽根F1〜F8の位置を把握する。計測した到達時間及び各羽根F1〜F8の位置に基づき紙葉類が羽根車100の回転速度を制御することにより紙葉類を羽根車100に適切に収納する。
【解決手段】取出装置10によって紙葉類間の間隔が一定(Lk)となるように取出された紙葉類を一定速度で搬送し、この搬送路の中途部分に当該紙葉類を検知する複数の搬送センサを配置し、紙葉類の搬送速度を算出する。この算出した搬送速度に基づき紙葉類の先端が羽根車に到達する迄の到達時間を算出する。一方、回転検知装置120は羽根車100の回転を検知し、羽根車100の各羽根F1〜F8の位置を把握する。計測した到達時間及び各羽根F1〜F8の位置に基づき紙葉類が羽根車100の回転速度を制御することにより紙葉類を羽根車100に適切に収納する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紙葉類処理装置に関する。
【背景技術】
【0002】
従来の紙葉類処理装置は、処理単位に応じて一括して供給された紙葉類束(例えば、1000枚)から取出装置によって紙葉類を一定ピッチで1枚ずつ取り出して搬送し、紙葉類判別装置によって当該紙葉類の真偽(真券か偽券)及び正損(正券か損券)を判別し、その判別結果に基づいて正券(再流通可能な券)、損券(損傷が有り再流通不可能な券)、又は判別不能券・搬送異常券・2枚取り券などの排除券に区分して搬送し、区分処理を行うものである。
【0003】
正券は、正券集積装置の羽根車集積装置で集積され、100枚に達する毎に紙帯などで施封されて100枚束が形成される。
【0004】
損券は、上記同様に羽根車集積装置で集積される場合、又は紙葉類裁断装置に搬送されて直接裁断される場合がある。
【0005】
排除券は、排除券集積庫に集積される場合と排除券集積装置に集積される場合がある。
【0006】
上記正券又は損券は羽根車集積装置によって集積される。この羽根車集積装置は、高速に搬送される紙葉類の運動エネルギーを回転する羽根車で吸収しながら所定の位置に集積する手段として知られているが、回転する羽根と羽根の間に紙葉類を取り込む必要があるため、搬送される紙葉類と羽根車の回転の同期を取る必要がある。この同期をとるために、搬送方向に対して、羽根車の搬送方向上流に紙葉類を検知するセンサを配置し、当該センサと羽根車の同期を取る羽根車制御方法、又は紙葉類を取り出す取出ロータに同期させる羽根車制御方法が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−193517号公報(第10頁、図10)
【発明の概要】
【発明が解決しようとする課題】
【0008】
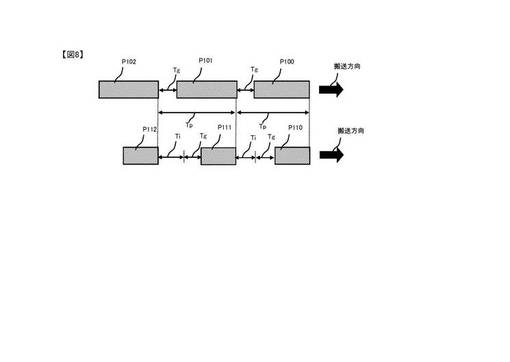
以下、図8を参照して従来の紙葉類処理装置の取出ピッチの説明をする。従来の紙葉類処理装置では、取出装置により紙葉類を一定ピッチTpで1枚ずつ取り出す(以下、この取出法を定ピッチ取出とする)。この取出した紙葉類を搬送し、一定速度で回転制御される羽根車の羽根と羽根の間に紙葉類を収納することによって紙葉類を集積し、必要に応じて施封を行っている。しかし、一定のピッチで1枚ずつ紙葉類を取り出す定ピッチ取出では、紙葉類を区分処理するために区分ゲートの切り替え時間Tgを確保する必要がある。ここで、区分ゲートの切り替え時間Tgは、通常、紙葉類を処理する処理時間、区分ゲートのゲート切り替え時間を含むものである。しかし、区分ゲートの切り替え時間は紙葉類の処理時間と比較して長いため、紙葉類を処理する処理時間を無視し、Tgは区分ゲートの切り替え時間として以後説明する。
【0009】
従って、図8に示すように券長(ここで、券長とは、紙葉類の搬送方向の長さをいう)の短い紙葉類を処理する場合には、次の紙葉類までの間に無駄時間Tiが生じ、処理効率の面から従来の紙葉類処理装置は利便性に欠ける。ここで、図8は、紙葉類P100〜P102は券長の長い紙葉類、紙葉類P110〜112は紙葉類P100〜P102よりも券長の短い紙葉類を指し、図示太矢印方向に紙葉類が搬送されている図を示す。
【0010】
また、様々な券種が取出ロータによって取り出され、混合して搬送される場合にも上記の無駄時間Tiは生じる。更に、このような様々な券種が混合して搬送される場合には羽根車を一定速度で回転制御していては紙葉類を収納するタイミングが券種によって異なるため、確実に紙葉類を集積することが不可能となり、利便性の良いものとは言えない。
【0011】
そこで、本発明は利便性の良い紙葉類処理装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、請求項1記載の紙葉類集積装置は、集積された複数枚の紙葉類を紙葉類間の間隔が一定となるように1枚ずつ取り出す取出装置と、前記取出装置によって取り出された紙葉類を搬送する搬送手段と、前記搬送手段により搬送される紙葉類からこの紙葉類の持つ情報を検出する検出手段と、前記検出手段の検出結果にしたがって前記搬送手段により搬送される紙葉類を区分する区分手段と、回転方向に所定間隔をおいて配置される複数枚の羽根を有し、回転することにより前記羽根と羽根との間に前記区分手段により区分された紙葉類を進入させて所定方向に案内する羽根車と、前記搬送手段によって搬送される紙葉類が第1の位置に到達したことを検知する第1の検知手段と、前記第1の位置よりも第1の距離離れた搬送方向下流の第2の位置に紙葉類が到達したことを検知する第2の検知手段と、前記第1の距離及び前記第1の検知手段によって検知された当該紙葉類が第2の検知手段によって検知されるまでの時間に基づいて前記当該紙葉類の搬送速度を算出する搬送速度算出手段と、前記第2の位置から前記羽根車までの第2の距離及び前記搬送速度算出手段によって算出された搬送速度に基づいて、前記当該紙葉類が前記第2の位置から前記羽根車に到達するまでの到達時間を算出する到達時間算出手段と、前記第2の位置に前記当該紙葉類が到達してから前記到達時間経過後の前記羽根車の各羽根の位置を予測する予測手段と、前記予測手段によって予測される各羽根の位置に基づいて、紙葉類の先端が自ポイントに到達した場合に各羽根の間に適切に収納される収納最適ポイントと前記当該紙葉類の先端との差異が生じるか否かを判定する判定手段と、前記判定手段によって差異が生じると判定されたとき、前記羽根車の回転速度を制御する回転制御手段と、前記羽根車により案内される紙葉類を集積する集積部と、を有することを特徴とする。
【発明の効果】
【0013】
本発明によれば、利便性の良い紙葉類処理装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施の形態である紙葉類処理装置1の構成図。
【図2】本発明の一実施の形態である紙葉類処理装置1のブロック図。
【図3】紙葉類の取出し説明する簡略側面図。
【図4】定ギャップ取出を示す簡略側面図。
【図5】羽根車100の回転制御を説明する側面図。
【図6】羽根車100の制御を示す簡略図。
【図7】羽根車100、回転盤110及び回転検知装置120の信号の関係を示す概念図。
【図8】定ピッチ取出における無駄時間を示す図。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の一実施の形態を説明する。
【0016】
(実施の形態)
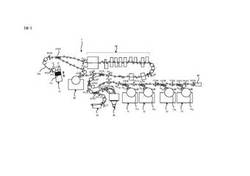
図1は、本発明の一実施の形態である紙葉類処理装置1の構成図である。この紙葉類処理装置1は、取出装置10、搬送装置20(図2参照)(搬送手段)、紙葉類判別装置30(検出手段)、排除券集積装置40、オーディット装置50、裁断装置60、紙葉類集積・施封装置71〜74(集積部)、エスケープ装置80及び区分ゲートGT00〜GT07(区分手段)などで構成される。
【0017】
取出装置10は、処理単位に応じて一括して供給された紙葉類束Ps(例えば、1000枚)を供給する供給部及び取出ロータ12などで構成される。
【0018】
供給部のバックアッププレート11aに載置された紙葉類束Psの最上面の紙葉類Pが取出位置に達すると、当該紙葉類Pは取出ロータ12が1回転する毎に、この取出ロータ12の回転を検知する回転検知装置(図示しない)によって回転が検知され、この回転によって当該最上面の紙葉類Pから順番に1枚ずつ搬送路20aに取出される。
【0019】
搬送装置20は、搬送上流から下流に向かって搬送路20a上に配置された搬送ローラ及びこの搬送ローラにかけまわされた搬送ベルト及び搬送ローラを駆動する駆動源(図示しない)などで構成される。
【0020】
取出ロータ12によって取出された紙葉類Pは搬送装置20によって搬送路20a上を搬送上流から下流に向かって搬送される。この搬送の際、搬送状態の悪い搬送異常券(例えば、搬送位置ずれ、搬送スキューなど)が検知された場合には、区分ゲートGT00によって排除券集積装置40に搬送されて集積される。搬送状態の悪い紙葉類を搬送すると搬送異常、誤検知、集積異常などのジャムを誘発する場合があるため、このような紙葉類の区分処理を行わずに、操作員による再処理を可能にするためである。
【0021】
搬送異常券とならずに正常に搬送された紙葉類は、紙葉類判別装置30によって紙葉類が判別される。この紙葉類判別装置30は、複数の検知装置で構成され、紙葉類の物理特性及び品質特性を検知し、この検知装置の検知結果に基づいて当該紙葉類を正券、損券及び排除券に区分する。
【0022】
上述の紙葉類判別装置30を構成する複数の検知装置は、紙葉類に含有された磁性を検知する磁気検知装置、蛍光を検知する蛍光検知装置、形状を検知する形状検知装置、印刷デザインを検知する券種検知装置、紙葉類の品質を検知する正損検知装置、厚さを検知する厚さ検知装置などで構成される。
【0023】
この紙葉類判別装置30による判別の結果、排除券に判別された紙葉類は、区分ゲートGT01によって排除券集積装置40に搬送されて集積される。
【0024】
損券は区分ゲートGT02及びGT03によって裁断装置60に搬送されて裁断される。なお、この裁断装置60は運用に応じて配置され、損券は後述する紙葉類集積・施封装置71〜74に集積して運用するために配置しない場合もある。
【0025】
また、正券は、区分ゲートGT01及びGT02によって紙葉類集積・施封装置71〜74に搬送される。
【0026】
この紙葉類集積・施封装置71〜74は、操作表示部(図示しない)から操作員によりいずれの紙葉類集積・施封装置にいずれの紙葉類を集積及び施封処理するかが設定される。例えば、紙葉類集積・施封装置71〜73には正券を集積し、紙葉類集積・施封装置74には損券を集積する。なお、図示したように裁断装置60が設けられている場合には、上述したようにこの裁断装置60によって上記損券を裁断する設定を行うことが可能である。
【0027】
オーディット装置50は、区分処理される紙葉類の品質を確認するために、指定品質(例えば、正券)の紙葉類を抽出する装置である。
【0028】
エスケープ装置80は、紙葉類判別装置30による判別時は排除券と判別されなかったが、その後に搬送異常が発生し、紙葉類集積・施封装置71〜74による集積又は施封処理が出来ないと判別された紙葉類を集積する。紙葉類集積・施封装置71〜74による集積不良を防止するためである。
【0029】
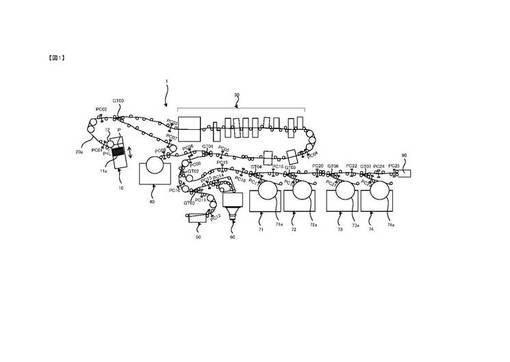
図2は、本発明の一実施の形態に係る紙葉類処理装置1の構成を示すブロック図である。紙葉類処理装置1は、例えばPC(Personal Computer)などをメインコントローラC1として有している。このメインコントローラC1にはデータ蓄積装置107が配置され、また、帳票出力プリンタ101、表示部102及びキーボード・マウスなどの入力装置103が接続されている。また、メインコントローラC1には例えばUSB(Universal Serial Bus)U1などのインタフェースを通じて、紙葉類処理装置1内の各部の制御を行うコントローラであるトランスポートコントローラC2、バンダーコントローラC3、検知コントローラC4が接続されている。
【0030】
トランスポートコントローラC2は、メインコントローラC1による管理の下、取出装置10、搬送装置20、紙葉類判別装置30、排除券集積装置40、オーディット装置50、裁断装置60、エスケープ装置80、紙葉類集積・施封装置71〜74などの制御を行う。
【0031】
バンダーコントローラC3は、メインコントローラC1による管理の下、紙葉類集積・施封装置71〜74内の集積施封ユニット71a〜74aの制御を行うとともに、回転検知装置71b〜74b(回転検知装置71b〜74bは後述の各羽根車毎にあるが、特に区別して説明する必要がない限り総称して回転検知装置120とする)及び各羽根車(羽根車は紙葉類集積・施封装置71〜74毎にあるが、特に区別して説明する必要がない限り総称して羽根車100とする)の制御を行う羽根車制御装置71c〜74cなどの制御を行う。
【0032】
更に、使用態様によっては、メインコントローラC1はLAN(Local Area Network)Lを通じてネットワークサーバ104と接続され、このネットワークサーバ104を通じて他の紙葉類処理装置105などと通信可能に接続される。
【0033】
検知コントローラC4は、メインコントローラC1による管理の下、紙葉類判別装置30の制御を行う。
【0034】
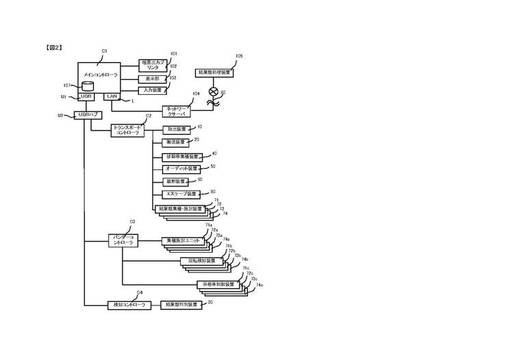
図3は、取出装置10の断面図である。取出ロータ12の内部には、図示しない真空ポンプにチューブが繋がる回転しない真空チャンバ11があり、その1箇所に穴13が開いて、紙葉類Pの取出先端部分に配置されている。また、取出ロータ12の回転する外周にも吸着用の穴14が開いている。取出ロータ12の外周が回転し、バックアッププレート11aに積載され、バックアッププレート11aにより上方(図示矢印A方向)に付圧された紙葉類束Psの最上面の紙葉類が取出位置に達すると、最上面の紙葉類Pは真空ポンプの圧力より吸着され、搬送路20aへ取出される。搬送路20aの入り口には図示しない2枚取り防止ブロックが設置され、2枚目の紙葉類が搬送路20aに挿入されるのを防いでいる。搬送路20aは、対峙された2枚、2組計4本のベルトから構成され、紙葉類の2箇所を挟持し搬送する。
【0035】
搬送路20aの途中には、紙葉類の存在を確認する発光部と受光部とからなる搬送センサPC01〜PC25(図1参照)が配置されている。紙葉類が発光部の光を防ぎ、受光部が受光出来ないと搬送センサPC01〜PC25の信号は「暗」となり、紙葉類の存在(以下、券影とする)が検出される。
【0036】
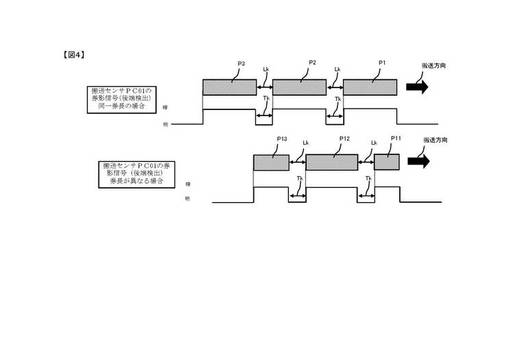
取出ロータ12の外周部が回転するたびに、バックアッププレート11aに積載された紙葉類束Psの最上面の紙葉類Pが、搬送路20aに取り出される。この取出ロータ12の外周部の回転を制御することで、紙葉類の取出間隔が制御される。トランスポートコントローラC2は、搬送センサPC01(第3の検知手段)の信号(以下、券影信号とする)が「暗」から「明」となった時点(紙葉類の後端を検出:後端検出)から、一定時間Tk(図4参照)後に、次の紙葉類を取出す(以下、この取出法を定ギャップ取出とする)。この様に、取出ロータ12の外周部を回転させるモータを制御し、この制御によって、搬送される紙葉類の間隔(搬送間隔)を一定(Lk)にすることが出来る(図4参照)。
【0037】
図4は、取出ロータ12によって搬送間隔が一定(Lk)となるよう取り出された紙葉類P1、P2、P3が搬送路20aを図示太矢印方向に搬送される図を示している。この図は、券長が同一の紙葉類が搬送される場合と、券長が異なる紙葉類が搬送される場合とを各々搬送センサPC01の券影信号とともに図示した。
【0038】
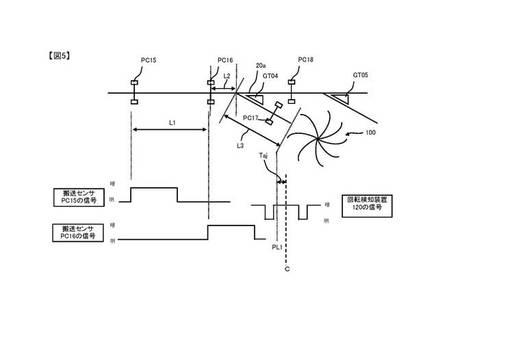
次に、羽根車100の回転制御に関して図5を用いて説明する。図5は、羽根車100と羽根車100近傍の搬送路20aと搬送センサPC15〜PC18を示す。搬送路20aを搬送されてきた紙葉類は、搬送センサPC15、PC16に達し、GT04によって区分され、PC17或いはPC18に達し、終端の各紙葉類・集積施封装置71〜74のいずれかに集積される(上述のように使用態様によって紙葉類・集積施封装置71〜74のいずれに集積されるかは任意に設定可能である)。
【0039】
その際、搬送装置20は、搬送センサPC15(搬送センサPC15の配置されている位置:第1の位置)(第1の検知手段)から距離L1(第1の距離)離間した搬送センサPC16(搬送センサPC16の配置されている位置:第2の位置)(第2の検知手段)に達するまでの時間T1を計測する。
【0040】
また、搬送装置20は、この間の搬送速度を上述の距離L1と計測した時間T1に基づき搬送速度V1を算出する(搬送速度算出手段)。搬送速度V1は下式(1)の様に表わされる。
【0041】
V1=L1/T1・・・・・(1)
また、搬送装置20は、搬送センサPC16から羽根車100までの搬送路20aに沿って測った距離(L2+L3)(第2の距離)及び上述の搬送速度V1に基づき、紙葉類が搬送センサPC16に到達してから羽根車100に到達するまでの到達時間T2を算出する(到達時間算出手段)。到達時間T2は、上述の搬送速度V1及び距離(L2+L3)を用いて下式の様に表わされる。
【0042】
T2=(L2+L3)/V1・・・・・(2)
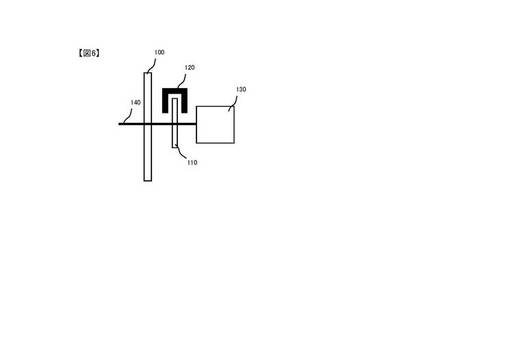
図6は、羽根車100の回転の検知及び回転制御を説明する図である。一方、羽根車100は回転盤110と軸140により同軸上に軸支され、羽根車制御モータ130(羽根車制御モータは各羽根車毎にあるが、特に区別して説明する必要がない限り総称し羽根車制御モータ130とする)はこの羽根車100の回転速度を制御する(図6参照)。
【0043】
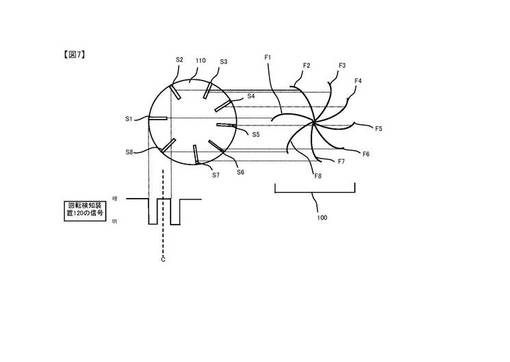
図7は、羽根車100と回転検知装置120との関係を回転検知装置120の検知信号とともに示した図である。図7に示すように羽根車100の各羽根F1〜F8は、この回転盤110の各スリットS1〜S8に対応している。また、回転検知装置120(図6参照)は、このスリットS1〜S8を検知する(検知信号:「暗」から「明」)ことにより回転盤110の回転角度を検知し、各羽根F1〜F8の位置を把握することができる(予測手段)。
【0044】
この回転検知装置120によって紙葉類Pが搬送センサPC16に到達してからの時間T2後の羽根の位置を予測し、羽根と羽根の中心位置Cと搬送センサPC16に到達した紙葉類Pの時間T2後の先端の位置PL1の差異Taj(図5参照)を算出する(判定手段)。
【0045】
尚、本実施例においては羽根と羽根の中心位置Cに紙葉類Pの先端が到達したとき紙葉類Pが羽根と羽根の間に適切に収納がされるものする(この紙葉類Pが各羽根の間に適切に収納されるポイント:収納最適ポイント)。必要に応じて適切に収納がされる位置は中心位置Cからずらしても良い。その場合は、中心位置Cからずらした位置と搬送センサPC16に到達した紙葉類Pの時間T2後の先端の位置PL1との差異をTajとする。
【0046】
もし、紙葉類Pの先端の到達が、羽根と羽根の中心位置よりも早いと予測されるときは、羽根車制御装置71cにより制御される羽根車制御モータ130を遅く回転制御し、反対に到達が遅いと予測されるときは、羽根車制御モータ130を速く回転制御する(回転制御手段)。この制御によって、紙葉類Pは羽根と羽根の間に収納され、図示しない掻き出し板により紙葉類集積・施封装置71へ集積される。ここでは、紙葉類集積・施封装置71へ集積される場合を説明したが、紙葉類集積・施封装置72〜74へ集積される場合も同様であるため説明は省略する。
【0047】
以上のように、本発明によれば、処理する紙葉類の券長の長短による無駄時間Tiが発生せず、確実に集積することが可能となる処理効率の良い紙葉類処理装置を提供することができる。また、本実施例においては、券長の同じ紙葉類が連続して搬送される例を説明したが、券種の異なる紙葉類が混合して搬送される場合も同様に無駄時間を発生させることなく、確実に紙葉類集積・施封装置に集積させることができるため、高い処理効率を発揮することができる。
【0048】
なお、この発明は、上述した実施の形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具現化できる。
【符号の説明】
【0049】
C1 メインコントローラ
C2 トランスポートコントローラ
C3 バンダーコントローラ
C4 検知コントローラ
U1 USB(Universal Serial Bus)
L LAN(Local Area Network)
U2 USBハブ
PC01〜PC25 搬送センサ
GT00〜GT07 区分ゲート
F1〜F8 羽根
S1〜S8 スリット
Ps 紙葉類束
1 紙葉類処理装置
10 取出装置
11 真空チャンバ
12 取出ロータ
13、14 穴
11a バックアッププレート
20 搬送装置
20a 搬送路
30 紙葉類判別装置
40 排除券集積装置
50 オーディット装置
60 裁断装置
71〜74 紙葉類集積・施封装置
71a〜74a 集積施封ユニット
71b〜74b 回転検知装置
71c〜74c 羽根車制御装置
80 エスケープ装置
101 帳票出力プリンタ
102 表示部
103 入力装置
104 ネットワークサーバ
105 紙葉類処理装置
110 回転盤
130 回転制御モータ
【技術分野】
【0001】
本発明は、紙葉類処理装置に関する。
【背景技術】
【0002】
従来の紙葉類処理装置は、処理単位に応じて一括して供給された紙葉類束(例えば、1000枚)から取出装置によって紙葉類を一定ピッチで1枚ずつ取り出して搬送し、紙葉類判別装置によって当該紙葉類の真偽(真券か偽券)及び正損(正券か損券)を判別し、その判別結果に基づいて正券(再流通可能な券)、損券(損傷が有り再流通不可能な券)、又は判別不能券・搬送異常券・2枚取り券などの排除券に区分して搬送し、区分処理を行うものである。
【0003】
正券は、正券集積装置の羽根車集積装置で集積され、100枚に達する毎に紙帯などで施封されて100枚束が形成される。
【0004】
損券は、上記同様に羽根車集積装置で集積される場合、又は紙葉類裁断装置に搬送されて直接裁断される場合がある。
【0005】
排除券は、排除券集積庫に集積される場合と排除券集積装置に集積される場合がある。
【0006】
上記正券又は損券は羽根車集積装置によって集積される。この羽根車集積装置は、高速に搬送される紙葉類の運動エネルギーを回転する羽根車で吸収しながら所定の位置に集積する手段として知られているが、回転する羽根と羽根の間に紙葉類を取り込む必要があるため、搬送される紙葉類と羽根車の回転の同期を取る必要がある。この同期をとるために、搬送方向に対して、羽根車の搬送方向上流に紙葉類を検知するセンサを配置し、当該センサと羽根車の同期を取る羽根車制御方法、又は紙葉類を取り出す取出ロータに同期させる羽根車制御方法が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2002−193517号公報(第10頁、図10)
【発明の概要】
【発明が解決しようとする課題】
【0008】
以下、図8を参照して従来の紙葉類処理装置の取出ピッチの説明をする。従来の紙葉類処理装置では、取出装置により紙葉類を一定ピッチTpで1枚ずつ取り出す(以下、この取出法を定ピッチ取出とする)。この取出した紙葉類を搬送し、一定速度で回転制御される羽根車の羽根と羽根の間に紙葉類を収納することによって紙葉類を集積し、必要に応じて施封を行っている。しかし、一定のピッチで1枚ずつ紙葉類を取り出す定ピッチ取出では、紙葉類を区分処理するために区分ゲートの切り替え時間Tgを確保する必要がある。ここで、区分ゲートの切り替え時間Tgは、通常、紙葉類を処理する処理時間、区分ゲートのゲート切り替え時間を含むものである。しかし、区分ゲートの切り替え時間は紙葉類の処理時間と比較して長いため、紙葉類を処理する処理時間を無視し、Tgは区分ゲートの切り替え時間として以後説明する。
【0009】
従って、図8に示すように券長(ここで、券長とは、紙葉類の搬送方向の長さをいう)の短い紙葉類を処理する場合には、次の紙葉類までの間に無駄時間Tiが生じ、処理効率の面から従来の紙葉類処理装置は利便性に欠ける。ここで、図8は、紙葉類P100〜P102は券長の長い紙葉類、紙葉類P110〜112は紙葉類P100〜P102よりも券長の短い紙葉類を指し、図示太矢印方向に紙葉類が搬送されている図を示す。
【0010】
また、様々な券種が取出ロータによって取り出され、混合して搬送される場合にも上記の無駄時間Tiは生じる。更に、このような様々な券種が混合して搬送される場合には羽根車を一定速度で回転制御していては紙葉類を収納するタイミングが券種によって異なるため、確実に紙葉類を集積することが不可能となり、利便性の良いものとは言えない。
【0011】
そこで、本発明は利便性の良い紙葉類処理装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するために、請求項1記載の紙葉類集積装置は、集積された複数枚の紙葉類を紙葉類間の間隔が一定となるように1枚ずつ取り出す取出装置と、前記取出装置によって取り出された紙葉類を搬送する搬送手段と、前記搬送手段により搬送される紙葉類からこの紙葉類の持つ情報を検出する検出手段と、前記検出手段の検出結果にしたがって前記搬送手段により搬送される紙葉類を区分する区分手段と、回転方向に所定間隔をおいて配置される複数枚の羽根を有し、回転することにより前記羽根と羽根との間に前記区分手段により区分された紙葉類を進入させて所定方向に案内する羽根車と、前記搬送手段によって搬送される紙葉類が第1の位置に到達したことを検知する第1の検知手段と、前記第1の位置よりも第1の距離離れた搬送方向下流の第2の位置に紙葉類が到達したことを検知する第2の検知手段と、前記第1の距離及び前記第1の検知手段によって検知された当該紙葉類が第2の検知手段によって検知されるまでの時間に基づいて前記当該紙葉類の搬送速度を算出する搬送速度算出手段と、前記第2の位置から前記羽根車までの第2の距離及び前記搬送速度算出手段によって算出された搬送速度に基づいて、前記当該紙葉類が前記第2の位置から前記羽根車に到達するまでの到達時間を算出する到達時間算出手段と、前記第2の位置に前記当該紙葉類が到達してから前記到達時間経過後の前記羽根車の各羽根の位置を予測する予測手段と、前記予測手段によって予測される各羽根の位置に基づいて、紙葉類の先端が自ポイントに到達した場合に各羽根の間に適切に収納される収納最適ポイントと前記当該紙葉類の先端との差異が生じるか否かを判定する判定手段と、前記判定手段によって差異が生じると判定されたとき、前記羽根車の回転速度を制御する回転制御手段と、前記羽根車により案内される紙葉類を集積する集積部と、を有することを特徴とする。
【発明の効果】
【0013】
本発明によれば、利便性の良い紙葉類処理装置を提供することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施の形態である紙葉類処理装置1の構成図。
【図2】本発明の一実施の形態である紙葉類処理装置1のブロック図。
【図3】紙葉類の取出し説明する簡略側面図。
【図4】定ギャップ取出を示す簡略側面図。
【図5】羽根車100の回転制御を説明する側面図。
【図6】羽根車100の制御を示す簡略図。
【図7】羽根車100、回転盤110及び回転検知装置120の信号の関係を示す概念図。
【図8】定ピッチ取出における無駄時間を示す図。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明の一実施の形態を説明する。
【0016】
(実施の形態)
図1は、本発明の一実施の形態である紙葉類処理装置1の構成図である。この紙葉類処理装置1は、取出装置10、搬送装置20(図2参照)(搬送手段)、紙葉類判別装置30(検出手段)、排除券集積装置40、オーディット装置50、裁断装置60、紙葉類集積・施封装置71〜74(集積部)、エスケープ装置80及び区分ゲートGT00〜GT07(区分手段)などで構成される。
【0017】
取出装置10は、処理単位に応じて一括して供給された紙葉類束Ps(例えば、1000枚)を供給する供給部及び取出ロータ12などで構成される。
【0018】
供給部のバックアッププレート11aに載置された紙葉類束Psの最上面の紙葉類Pが取出位置に達すると、当該紙葉類Pは取出ロータ12が1回転する毎に、この取出ロータ12の回転を検知する回転検知装置(図示しない)によって回転が検知され、この回転によって当該最上面の紙葉類Pから順番に1枚ずつ搬送路20aに取出される。
【0019】
搬送装置20は、搬送上流から下流に向かって搬送路20a上に配置された搬送ローラ及びこの搬送ローラにかけまわされた搬送ベルト及び搬送ローラを駆動する駆動源(図示しない)などで構成される。
【0020】
取出ロータ12によって取出された紙葉類Pは搬送装置20によって搬送路20a上を搬送上流から下流に向かって搬送される。この搬送の際、搬送状態の悪い搬送異常券(例えば、搬送位置ずれ、搬送スキューなど)が検知された場合には、区分ゲートGT00によって排除券集積装置40に搬送されて集積される。搬送状態の悪い紙葉類を搬送すると搬送異常、誤検知、集積異常などのジャムを誘発する場合があるため、このような紙葉類の区分処理を行わずに、操作員による再処理を可能にするためである。
【0021】
搬送異常券とならずに正常に搬送された紙葉類は、紙葉類判別装置30によって紙葉類が判別される。この紙葉類判別装置30は、複数の検知装置で構成され、紙葉類の物理特性及び品質特性を検知し、この検知装置の検知結果に基づいて当該紙葉類を正券、損券及び排除券に区分する。
【0022】
上述の紙葉類判別装置30を構成する複数の検知装置は、紙葉類に含有された磁性を検知する磁気検知装置、蛍光を検知する蛍光検知装置、形状を検知する形状検知装置、印刷デザインを検知する券種検知装置、紙葉類の品質を検知する正損検知装置、厚さを検知する厚さ検知装置などで構成される。
【0023】
この紙葉類判別装置30による判別の結果、排除券に判別された紙葉類は、区分ゲートGT01によって排除券集積装置40に搬送されて集積される。
【0024】
損券は区分ゲートGT02及びGT03によって裁断装置60に搬送されて裁断される。なお、この裁断装置60は運用に応じて配置され、損券は後述する紙葉類集積・施封装置71〜74に集積して運用するために配置しない場合もある。
【0025】
また、正券は、区分ゲートGT01及びGT02によって紙葉類集積・施封装置71〜74に搬送される。
【0026】
この紙葉類集積・施封装置71〜74は、操作表示部(図示しない)から操作員によりいずれの紙葉類集積・施封装置にいずれの紙葉類を集積及び施封処理するかが設定される。例えば、紙葉類集積・施封装置71〜73には正券を集積し、紙葉類集積・施封装置74には損券を集積する。なお、図示したように裁断装置60が設けられている場合には、上述したようにこの裁断装置60によって上記損券を裁断する設定を行うことが可能である。
【0027】
オーディット装置50は、区分処理される紙葉類の品質を確認するために、指定品質(例えば、正券)の紙葉類を抽出する装置である。
【0028】
エスケープ装置80は、紙葉類判別装置30による判別時は排除券と判別されなかったが、その後に搬送異常が発生し、紙葉類集積・施封装置71〜74による集積又は施封処理が出来ないと判別された紙葉類を集積する。紙葉類集積・施封装置71〜74による集積不良を防止するためである。
【0029】
図2は、本発明の一実施の形態に係る紙葉類処理装置1の構成を示すブロック図である。紙葉類処理装置1は、例えばPC(Personal Computer)などをメインコントローラC1として有している。このメインコントローラC1にはデータ蓄積装置107が配置され、また、帳票出力プリンタ101、表示部102及びキーボード・マウスなどの入力装置103が接続されている。また、メインコントローラC1には例えばUSB(Universal Serial Bus)U1などのインタフェースを通じて、紙葉類処理装置1内の各部の制御を行うコントローラであるトランスポートコントローラC2、バンダーコントローラC3、検知コントローラC4が接続されている。
【0030】
トランスポートコントローラC2は、メインコントローラC1による管理の下、取出装置10、搬送装置20、紙葉類判別装置30、排除券集積装置40、オーディット装置50、裁断装置60、エスケープ装置80、紙葉類集積・施封装置71〜74などの制御を行う。
【0031】
バンダーコントローラC3は、メインコントローラC1による管理の下、紙葉類集積・施封装置71〜74内の集積施封ユニット71a〜74aの制御を行うとともに、回転検知装置71b〜74b(回転検知装置71b〜74bは後述の各羽根車毎にあるが、特に区別して説明する必要がない限り総称して回転検知装置120とする)及び各羽根車(羽根車は紙葉類集積・施封装置71〜74毎にあるが、特に区別して説明する必要がない限り総称して羽根車100とする)の制御を行う羽根車制御装置71c〜74cなどの制御を行う。
【0032】
更に、使用態様によっては、メインコントローラC1はLAN(Local Area Network)Lを通じてネットワークサーバ104と接続され、このネットワークサーバ104を通じて他の紙葉類処理装置105などと通信可能に接続される。
【0033】
検知コントローラC4は、メインコントローラC1による管理の下、紙葉類判別装置30の制御を行う。
【0034】
図3は、取出装置10の断面図である。取出ロータ12の内部には、図示しない真空ポンプにチューブが繋がる回転しない真空チャンバ11があり、その1箇所に穴13が開いて、紙葉類Pの取出先端部分に配置されている。また、取出ロータ12の回転する外周にも吸着用の穴14が開いている。取出ロータ12の外周が回転し、バックアッププレート11aに積載され、バックアッププレート11aにより上方(図示矢印A方向)に付圧された紙葉類束Psの最上面の紙葉類が取出位置に達すると、最上面の紙葉類Pは真空ポンプの圧力より吸着され、搬送路20aへ取出される。搬送路20aの入り口には図示しない2枚取り防止ブロックが設置され、2枚目の紙葉類が搬送路20aに挿入されるのを防いでいる。搬送路20aは、対峙された2枚、2組計4本のベルトから構成され、紙葉類の2箇所を挟持し搬送する。
【0035】
搬送路20aの途中には、紙葉類の存在を確認する発光部と受光部とからなる搬送センサPC01〜PC25(図1参照)が配置されている。紙葉類が発光部の光を防ぎ、受光部が受光出来ないと搬送センサPC01〜PC25の信号は「暗」となり、紙葉類の存在(以下、券影とする)が検出される。
【0036】
取出ロータ12の外周部が回転するたびに、バックアッププレート11aに積載された紙葉類束Psの最上面の紙葉類Pが、搬送路20aに取り出される。この取出ロータ12の外周部の回転を制御することで、紙葉類の取出間隔が制御される。トランスポートコントローラC2は、搬送センサPC01(第3の検知手段)の信号(以下、券影信号とする)が「暗」から「明」となった時点(紙葉類の後端を検出:後端検出)から、一定時間Tk(図4参照)後に、次の紙葉類を取出す(以下、この取出法を定ギャップ取出とする)。この様に、取出ロータ12の外周部を回転させるモータを制御し、この制御によって、搬送される紙葉類の間隔(搬送間隔)を一定(Lk)にすることが出来る(図4参照)。
【0037】
図4は、取出ロータ12によって搬送間隔が一定(Lk)となるよう取り出された紙葉類P1、P2、P3が搬送路20aを図示太矢印方向に搬送される図を示している。この図は、券長が同一の紙葉類が搬送される場合と、券長が異なる紙葉類が搬送される場合とを各々搬送センサPC01の券影信号とともに図示した。
【0038】
次に、羽根車100の回転制御に関して図5を用いて説明する。図5は、羽根車100と羽根車100近傍の搬送路20aと搬送センサPC15〜PC18を示す。搬送路20aを搬送されてきた紙葉類は、搬送センサPC15、PC16に達し、GT04によって区分され、PC17或いはPC18に達し、終端の各紙葉類・集積施封装置71〜74のいずれかに集積される(上述のように使用態様によって紙葉類・集積施封装置71〜74のいずれに集積されるかは任意に設定可能である)。
【0039】
その際、搬送装置20は、搬送センサPC15(搬送センサPC15の配置されている位置:第1の位置)(第1の検知手段)から距離L1(第1の距離)離間した搬送センサPC16(搬送センサPC16の配置されている位置:第2の位置)(第2の検知手段)に達するまでの時間T1を計測する。
【0040】
また、搬送装置20は、この間の搬送速度を上述の距離L1と計測した時間T1に基づき搬送速度V1を算出する(搬送速度算出手段)。搬送速度V1は下式(1)の様に表わされる。
【0041】
V1=L1/T1・・・・・(1)
また、搬送装置20は、搬送センサPC16から羽根車100までの搬送路20aに沿って測った距離(L2+L3)(第2の距離)及び上述の搬送速度V1に基づき、紙葉類が搬送センサPC16に到達してから羽根車100に到達するまでの到達時間T2を算出する(到達時間算出手段)。到達時間T2は、上述の搬送速度V1及び距離(L2+L3)を用いて下式の様に表わされる。
【0042】
T2=(L2+L3)/V1・・・・・(2)
図6は、羽根車100の回転の検知及び回転制御を説明する図である。一方、羽根車100は回転盤110と軸140により同軸上に軸支され、羽根車制御モータ130(羽根車制御モータは各羽根車毎にあるが、特に区別して説明する必要がない限り総称し羽根車制御モータ130とする)はこの羽根車100の回転速度を制御する(図6参照)。
【0043】
図7は、羽根車100と回転検知装置120との関係を回転検知装置120の検知信号とともに示した図である。図7に示すように羽根車100の各羽根F1〜F8は、この回転盤110の各スリットS1〜S8に対応している。また、回転検知装置120(図6参照)は、このスリットS1〜S8を検知する(検知信号:「暗」から「明」)ことにより回転盤110の回転角度を検知し、各羽根F1〜F8の位置を把握することができる(予測手段)。
【0044】
この回転検知装置120によって紙葉類Pが搬送センサPC16に到達してからの時間T2後の羽根の位置を予測し、羽根と羽根の中心位置Cと搬送センサPC16に到達した紙葉類Pの時間T2後の先端の位置PL1の差異Taj(図5参照)を算出する(判定手段)。
【0045】
尚、本実施例においては羽根と羽根の中心位置Cに紙葉類Pの先端が到達したとき紙葉類Pが羽根と羽根の間に適切に収納がされるものする(この紙葉類Pが各羽根の間に適切に収納されるポイント:収納最適ポイント)。必要に応じて適切に収納がされる位置は中心位置Cからずらしても良い。その場合は、中心位置Cからずらした位置と搬送センサPC16に到達した紙葉類Pの時間T2後の先端の位置PL1との差異をTajとする。
【0046】
もし、紙葉類Pの先端の到達が、羽根と羽根の中心位置よりも早いと予測されるときは、羽根車制御装置71cにより制御される羽根車制御モータ130を遅く回転制御し、反対に到達が遅いと予測されるときは、羽根車制御モータ130を速く回転制御する(回転制御手段)。この制御によって、紙葉類Pは羽根と羽根の間に収納され、図示しない掻き出し板により紙葉類集積・施封装置71へ集積される。ここでは、紙葉類集積・施封装置71へ集積される場合を説明したが、紙葉類集積・施封装置72〜74へ集積される場合も同様であるため説明は省略する。
【0047】
以上のように、本発明によれば、処理する紙葉類の券長の長短による無駄時間Tiが発生せず、確実に集積することが可能となる処理効率の良い紙葉類処理装置を提供することができる。また、本実施例においては、券長の同じ紙葉類が連続して搬送される例を説明したが、券種の異なる紙葉類が混合して搬送される場合も同様に無駄時間を発生させることなく、確実に紙葉類集積・施封装置に集積させることができるため、高い処理効率を発揮することができる。
【0048】
なお、この発明は、上述した実施の形態に限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具現化できる。
【符号の説明】
【0049】
C1 メインコントローラ
C2 トランスポートコントローラ
C3 バンダーコントローラ
C4 検知コントローラ
U1 USB(Universal Serial Bus)
L LAN(Local Area Network)
U2 USBハブ
PC01〜PC25 搬送センサ
GT00〜GT07 区分ゲート
F1〜F8 羽根
S1〜S8 スリット
Ps 紙葉類束
1 紙葉類処理装置
10 取出装置
11 真空チャンバ
12 取出ロータ
13、14 穴
11a バックアッププレート
20 搬送装置
20a 搬送路
30 紙葉類判別装置
40 排除券集積装置
50 オーディット装置
60 裁断装置
71〜74 紙葉類集積・施封装置
71a〜74a 集積施封ユニット
71b〜74b 回転検知装置
71c〜74c 羽根車制御装置
80 エスケープ装置
101 帳票出力プリンタ
102 表示部
103 入力装置
104 ネットワークサーバ
105 紙葉類処理装置
110 回転盤
130 回転制御モータ
【特許請求の範囲】
【請求項1】
集積された複数枚の紙葉類を紙葉類間の間隔が一定となるように1枚ずつ取り出す取出装置と、
前記取出装置によって取り出された紙葉類を搬送する搬送手段と、
前記搬送手段により搬送される紙葉類からこの紙葉類の持つ情報を検出する検出手段と、
前記検出手段の検出結果にしたがって前記搬送手段により搬送される紙葉類を区分する区分手段と、
回転方向に所定間隔をおいて配置される複数枚の羽根を有し、回転することにより前記羽根と羽根との間に前記区分手段により区分された紙葉類を進入させて所定方向に案内する羽根車と、
前記搬送手段によって搬送される紙葉類が第1の位置に到達したことを検知する第1の検知手段と、
前記第1の位置よりも第1の距離離れた搬送方向下流の第2の位置に紙葉類が到達したことを検知する第2の検知手段と、
前記第1の距離及び前記第1の検知手段によって検知された当該紙葉類が第2の検知手段によって検知されるまでの時間に基づいて前記当該紙葉類の搬送速度を算出する搬送速度算出手段と、
前記第2の位置から前記羽根車までの第2の距離及び前記搬送速度算出手段によって算出された搬送速度に基づいて、前記当該紙葉類が前記第2の位置から前記羽根車に到達するまでの到達時間を算出する到達時間算出手段と、
前記第2の位置に前記当該紙葉類が到達してから前記到達時間経過後の前記羽根車の各羽根の位置を予測する予測手段と、
前記予測手段によって予測される各羽根の位置に基づいて、紙葉類の先端が自ポイントに到達した場合に各羽根の間に適切に収納される収納最適ポイントと前記当該紙葉類の先端との差異が生じるか否かを判定する判定手段と、
前記判定手段によって差異が生じると判定されたとき、前記羽根車の回転速度を制御する回転制御手段と、
前記羽根車により案内される紙葉類を集積する集積部と、
を有することを特徴とする紙葉類処理装置。
【請求項2】
前記紙葉類処理装置は、
前記搬送手段によって搬送される紙葉類の後端を検知する第3の検知手段を更に有し、
前記取出装置は、
前記第3の検知手段によって第1の紙葉類の後端が検知されたことに基づいて前記第1の紙葉類の下に集積された第2の紙葉類を取り出すことを特徴とする請求項1記載の紙葉類処理装置。
【請求項3】
前記回転制御手段は、
前記判定手段によって前記当該紙葉類が前記収納最適ポイントよりも早く前記羽根車に到達すると判定されたとき、前記羽根車の回転速度を速める制御をし、前記収納最適ポイントよりも遅く前記羽根車に到達すると判定されたとき、前記羽根車の回転速度を遅らせる制御をすること特徴とする請求項1及び請求項2記載の紙葉類処理装置。
【請求項1】
集積された複数枚の紙葉類を紙葉類間の間隔が一定となるように1枚ずつ取り出す取出装置と、
前記取出装置によって取り出された紙葉類を搬送する搬送手段と、
前記搬送手段により搬送される紙葉類からこの紙葉類の持つ情報を検出する検出手段と、
前記検出手段の検出結果にしたがって前記搬送手段により搬送される紙葉類を区分する区分手段と、
回転方向に所定間隔をおいて配置される複数枚の羽根を有し、回転することにより前記羽根と羽根との間に前記区分手段により区分された紙葉類を進入させて所定方向に案内する羽根車と、
前記搬送手段によって搬送される紙葉類が第1の位置に到達したことを検知する第1の検知手段と、
前記第1の位置よりも第1の距離離れた搬送方向下流の第2の位置に紙葉類が到達したことを検知する第2の検知手段と、
前記第1の距離及び前記第1の検知手段によって検知された当該紙葉類が第2の検知手段によって検知されるまでの時間に基づいて前記当該紙葉類の搬送速度を算出する搬送速度算出手段と、
前記第2の位置から前記羽根車までの第2の距離及び前記搬送速度算出手段によって算出された搬送速度に基づいて、前記当該紙葉類が前記第2の位置から前記羽根車に到達するまでの到達時間を算出する到達時間算出手段と、
前記第2の位置に前記当該紙葉類が到達してから前記到達時間経過後の前記羽根車の各羽根の位置を予測する予測手段と、
前記予測手段によって予測される各羽根の位置に基づいて、紙葉類の先端が自ポイントに到達した場合に各羽根の間に適切に収納される収納最適ポイントと前記当該紙葉類の先端との差異が生じるか否かを判定する判定手段と、
前記判定手段によって差異が生じると判定されたとき、前記羽根車の回転速度を制御する回転制御手段と、
前記羽根車により案内される紙葉類を集積する集積部と、
を有することを特徴とする紙葉類処理装置。
【請求項2】
前記紙葉類処理装置は、
前記搬送手段によって搬送される紙葉類の後端を検知する第3の検知手段を更に有し、
前記取出装置は、
前記第3の検知手段によって第1の紙葉類の後端が検知されたことに基づいて前記第1の紙葉類の下に集積された第2の紙葉類を取り出すことを特徴とする請求項1記載の紙葉類処理装置。
【請求項3】
前記回転制御手段は、
前記判定手段によって前記当該紙葉類が前記収納最適ポイントよりも早く前記羽根車に到達すると判定されたとき、前記羽根車の回転速度を速める制御をし、前記収納最適ポイントよりも遅く前記羽根車に到達すると判定されたとき、前記羽根車の回転速度を遅らせる制御をすること特徴とする請求項1及び請求項2記載の紙葉類処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−238152(P2010−238152A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2009−88002(P2009−88002)
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成21年3月31日(2009.3.31)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]