
紛体供給装置
【課題】所定量の粉体を供給することができる粉体供給装置を提供することである。
【解決手段】ガイド部材700が、排出口600に設けられ、かつ円筒体200底面に対して傾斜して設けられる。投入され貯留された粉体の全自重が排出口600に加わるのを防止しつつ、所定量の粉体を底部に設けられた排出口600から排出させることができる。また、回転羽根401,〜,404の回転およびガイド部材700により積極的に粉体を掻き出すことができる。また、回転羽根401,〜,404を回転させることにより、円筒体200内の底部近傍の粉体に攪拌作用を与え、排出の安定性を実現するとともに、排出口600における詰まりを防止することができる。
【解決手段】ガイド部材700が、排出口600に設けられ、かつ円筒体200底面に対して傾斜して設けられる。投入され貯留された粉体の全自重が排出口600に加わるのを防止しつつ、所定量の粉体を底部に設けられた排出口600から排出させることができる。また、回転羽根401,〜,404の回転およびガイド部材700により積極的に粉体を掻き出すことができる。また、回転羽根401,〜,404を回転させることにより、円筒体200内の底部近傍の粉体に攪拌作用を与え、排出の安定性を実現するとともに、排出口600における詰まりを防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粉体を定量的に供給する紛体供給装置に関する。
【背景技術】
【0002】
従来、紛体を定量的に取り出すために、紛体供給装置が使用されている。これらの紛体供給装置に関して日々研究開発が行われている。
【0003】
例えば、特許文献1には、紛体を定量的に取り出すことができる定量取出装置が開示されている。
【0004】
特許文献1記載の定量取出装置は、粉粒状物を収容する空間を形成する一時貯留装置と、該一時貯留装置内の粉粒状物を下方から支持すると共に、略鉛直な軸線のまわりに回転して一時貯留装置内の粉粒状物を回転移動させる支持板と、一時貯留装置の側壁の下端部に形成され粉粒状物を取り出すための取出口と、取出口の近傍において一時貯留装置の内部に向って突出するスクレーパとを設け、支持板により運ばれた粉粒状物の一部をスクレーパで受け止めて、該スクレーパにより取出口に向って案内し、更に、取出口から排出して取り出すようにしたものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−77250号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1記載の定量取出装置では、紛粒状物に圧縮力をかけることなく粉状物を一定量取り出すことができる。
しかしながら、特許文献1記載の定量取出装置では、粘性の低い紛体の場合、適切に紛体を定量ずつ排出することができるが、粘性の高い紛体の場合、排出口において紛体が塊状となり、安定して供給することが困難となる。
【0007】
本発明の目的は、所定量の粉体を確実に供給することができる粉体供給装置を提供することである。
【課題を解決するための手段】
【0008】
(1)
本発明に係る粉体供給装置は、円筒体の上部開口部より粉体を投入し、該投入され貯留された粉体を円筒体内の底部に設けられた回転羽根を水平回転させることで、円筒体底部に設けられた排出口より紛体を供給する粉体供給装置であって、排出口に設けられ、回転羽根の回転上流側に向かって、かつ、円筒体底面に対して傾斜したガイド部材を含む。
【0009】
本発明に係る紛体供給装置においては、ガイド部材が、排出口に設けられ、かつ円筒体底面に対して傾斜して設けられる。
【0010】
この場合、投入され貯留された紛体の自重により円筒体の底部、すなわち排出口近傍に粉体を移動させることができる。また、塊状となり易い紛体、または粘性を有する紛体であっても、回転羽根によりおされ、ガイド部材により紛体が受け止められ、排出口から確実に所定量の紛体の供給を行うことができる。
また、回転羽根を回転させることにより、円筒体内の底部近傍の紛体に攪拌作用を与え、供給の安定性を実現するとともに、排出口における詰まりを防止することができる。すなわち、円筒体内に投入された紛体の自重が、傾斜したガイド部材により支持されるので、直接排出口近傍の紛体に紛体の自重が加わることを防止することができる。その結果、供給の安定性を実現することができる。
【0011】
(2)
第2の発明に係る粉体供給装置において、ガイド部材は、円筒体底部に対して高さを調整する高さ調整機構を備えるものである。
【0012】
この場合、ガイド部材の高さ調整機構により、該ガイド部材の円筒体底部からの高さが、調整される。その結果、円筒体に投入され、貯留された同一性状の紛体に対して紛体の供給量を調整することができる。さらに、円筒体に該紛体と異なる性状の紛体が投入された場合でも、当該異なる性状の紛体に応じて紛体の供給量を調整することができる。すなわち、紛体の異なる性状に対しても、高さを調整することができ、詰り、または塊状(だま状)を防止することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0013】
(3)
第3の発明に係る紛体供給装置において、ガイド部材は、排出口の開口幅を調整する排出口幅調整機構を備える。
【0014】
この場合、ガイド部材の排出口幅調整機構により、排出口の開口幅が調整される。その結果、円筒体に投入され、貯留された同一性状の紛体に対して紛体の供給量を調整することができる。さらに、円筒体に該紛体と異なる性状の紛体が投入された場合でも、当該異なる性状の紛体に応じて紛体の供給量を調整することができる。すなわち、紛体の異なる性状に対しても、排出幅を調整することができ、詰り、または塊状(だま状)を防止することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0015】
(4)
第4の発明に係る紛体供給装置は、円筒体を支持し、計量を行う計量装置をさらに備える。
【0016】
この場合、計量装置により円筒体全体の計量を行うことができる。その結果、円筒体および該円筒体内に投入された貯留された紛体の計量値から、供給された紛体の計量値を算出することができる。したがって、確実に供給された紛体の計量を行うことができる。
【0017】
(5)
第5の発明に係る紛体供給装置において、ガイド部材は、円筒体底面に対する傾斜角度を調整する角度調整部をさらに備える。
【0018】
この場合、ガイド部材の傾斜角度部材により、該ガイド部材の円筒体底面に対する傾斜角度を調整することができる。その結果、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0019】
(6)
第6の発明に係る紛体供給装置において、ガイド部材は、水平視角度を調整する水平角度調整機構を備える。
【0020】
この場合、水平角度調整機構によりガイド部材の水平視角度を調整することができる。その結果、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0021】
(7)
第7の発明に係る紛体供給装置において、水平視角度は、回転羽根の回転軸の中心に頂角を持つ。
【0022】
この場合、紛体が回転羽根により攪拌される場合、回転羽根の軸に近い方から粉体が供給され、供給されない紛体が該回転羽根の軸に遠い方に移動され、供給される。したがって、排出口から均一に紛体を供給することができる。
【0023】
(8)
第8の発明に係る紛体供給装置において、ガイド部材は、円筒体の底部外側より該円筒体の内側に延設する。
【0024】
この場合、ガイド部材は、円筒体の底部外側より該円筒体の内側に延設して設けられるので、ガイド部材により排出口に案内された円筒体内の紛体を、円滑に円筒体の底部の外側に供給することができる。
【0025】
(9)
第9の発明に係る紛体供給装置において、排出口は、回転羽根の回転軸からの放射方向に対して傾斜して設けられる。
【0026】
この場合、排出口が回転羽根の回転軸からの放射方向に対して傾斜して設けられるので、回転羽根が回転して紛体が排出されるタイミングが排出口の全域において移動するので、回転羽根のトルクを下げることができる。また、粉体を排出するタイミングが移動するので、排出口の詰りを防止することができる。
【0027】
(10)
第10の発明に係る紛体供給装置において、回転羽根の羽根は、垂直方向に対して傾斜して設けられる。
【0028】
この場合、回転羽根の羽根が、垂直方向に対して傾斜して設けられるので、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
例えば、ガイド部材に対して迎え角を有する場合には、粉体を円筒体の底部に対して押し出すように力が加わるため、紛体の大量排出に適し、迎え角と逆の傾斜を有する場合には、少量排出に適する。
【0029】
(11)
第11の発明に係る紛体供給装置において、制御部をさらに備え、制御部は、回転羽根の駆動を制御する。制御部は、計量装置からの計量値に基づいて、モータの駆動を制御する。制御部は、高さ調整機構を制御する。制御部は、排出口幅調整機構を制御する。制御部は、角度調整部を制御する。水平角度調整機構を制御する。
【0030】
この場合、排出口からの粉体の供給量を所定量に調整することができる。
【図面の簡単な説明】
【0031】
【図1】本実施形態に係る紛体供給装置の一例を示す模式的外観図である。
【図2】本実施形態に係る紛体供給装置の構成の一例を示す模式図である。
【図3】本実施形態に係る紛体供給装置の筒体の内部構造を説明するための模式図である。
【図4】図3に示した排出口、ガイド部材の位置関係を説明するための模式的断面図である。
【図5】図4に示したガイド部材の他の例を示す模式図である。
【図6】ガイド部材のさらに他の例を示す模式図である。
【図7】ガイド部材のさらに他の例を示す模式図である。
【図8】ガイド部材のさらに他の例を示す模式図である。
【図9】図8に示したスライド部材の他の例を示す模式図である。
【図10】回転羽根の他の例を示す模式図である。
【図11】回転羽根のさらに他の例を示す模式図である。
【図12】回転羽根のさらに他の例を示す模式図である。
【図13】回転羽根のさらに他の例を示す模式図である。
【図14】回転羽根のさらに他の例を示す模式図である。
【図15】回転羽根のさらに他の例を示す模式図である。
【図16】本実施形態に係る紛体供給装置の筒体の内部構造の他の例を説明するための模式図である。
【発明を実施するための最良の形態】
【0032】
以下、本発明の一実施形態に係る紛体供給装置について図面を参照しながら説明する。
【0033】
図1は本実施形態に係る紛体供給装置100の一例を示す模式図であり、図2は、本実施形態に係る紛体供給装置100の構成の一例を示す模式図であり、図3は本実施形態に係る紛体供給装置100の円筒体200の内部構造を説明するための模式図である。
【0034】
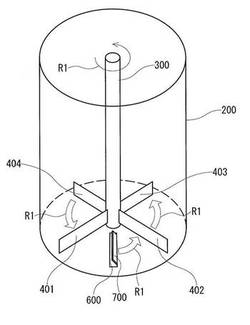
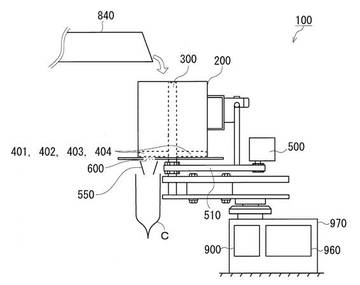
図1および図3に示すように、紛体供給装置100は、主に紛体投入装置840の下方に配置される。すなわち、紛体供給装置100は、紛体投入装置840から投入された紛体を、袋Cに所定量ずつ供給するものである。紛体供給装置100は、主に円筒体200、軸300、回転羽根401,〜,404、モータ500、ガイド部材700、制御部900および筐体970からなる。
【0035】
また、図1に示すように、モータ500が配設されており、モータ500の駆動力がベルト510を介して、軸300に与えられる。また、図1および図3に示すように、円筒体200の上面は開口して設けられ、紛体投入装置840から紛体が投入可能に設けられる。
また、紛体供給装置100の円筒体200の筒中央に鉛直方向に延在した軸300が設けられる。軸300の上端には、モータ500が設けられており、下端は円筒体200の底部に軸回転可能に固定され、下端部近傍には、回転羽根401,〜,404が設けられる。回転羽根401,〜,404は、軸300に90度ずつ均等に配設されている。また、円筒体200の底面には、排出口600が設けられ、袋Cの間には、漏斗550が設けられる。
【0036】
図3に示すように、モータ500が駆動されることにより、軸300が矢印R1の方向に回転し、回転羽根401,〜,404が矢印R1の方向に従動回転する。その結果、円筒体200の上面開口部から投入された紛体が、回転羽根401,〜,404に攪拌されるとともに、回転羽根401,〜,404によりおされた紛体がガイド部材700を介して排出口600から定量ずつ排出される。
【0037】
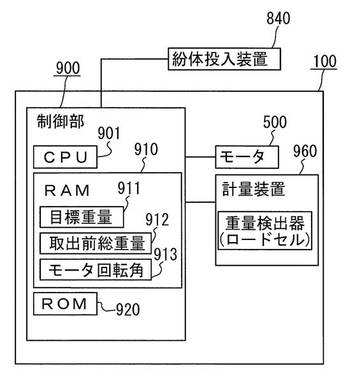
また、図2に示すように、制御部900は、CPU(中央制御装置)901、RAM(ランダムアクセスメモリ)910、ROM(リードオンリメモリ)920を含む。
【0038】
制御部900のCPU901は、RAM910に目標重量データ911、取出前総重量データ912およびモータ回転角データ(パルス数)913等を記録する。
ここで、目標重量データ911は、供給すべき粉体の総重量が記録されたデータであり、取出前総重量データ912は、モータ500を回転させる前の紛体供給装置100の全重量、すなわち、紛体供給装置100および紛体の合計重量で、かつモータ500が回転される度に記録されたデータであり、モータ回転角データ913は、供給時に回転したモータ500の回転角を記録したデータである。
【0039】
また、図2に示すように、計量装置960は、重量検出器(ロードセル)からなる。制御部900は、計量装置960により検出した負荷を受信して、紛体投入装置840を制御するとともに、モータ500の駆動を制御する。
【0040】
本実施の形態における制御部900は、計量装置960により検出された負荷の変化に基づいて、紛体供給装置100から供給された紛体の重量を求める。
すなわち、制御部900のCPU901は、取出前総重量データ912から現在の計量装置960の負荷を減算して、実際に袋C内に供給された紛体の供給量を算出し、該供給量を目標重量データ911と比較して、モータ500のフィードバック駆動(間欠駆動または所定駆動)を行う。
【0041】
(ガイド部材700)
次に、図4は、図3に示した排出口600、ガイド部材700の位置関係を説明するための模式的断面図である。
【0042】
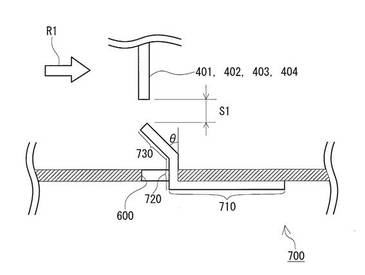
図4に示すように、ガイド部材700は、固定部710、垂直部720および掻き出し部730からなる。本実施の形態においては、図4に示すように、ガイド部材700の固定部710が円筒体200の底裏面(外側)においてボルト等(図示せず)により固定される。また、ガイド部材700の垂直部720は、固定部710と垂直に交差するよう設けられ、かつ排出口600の一端側に接触するように配設されている。それにより、ガイド部材700の垂直部720および掻き出し部730が円筒体200の内部に進入して設けられる。また、掻き出し部730は、排出口600の開口部の鉛直上方向を覆うように設けられている。
さらに、ガイド部材700の掻き出し部730は、垂直部720から矢印R1と逆方向に角度θ傾斜して設けられる。ここで、角度θは、−90度以上90度以下の範囲からなる。
【0043】
また、図4に示すように、掻き出し部730の先端は、回転羽根401,〜,404と隙間S1の間隔を維持して設けられる。回転羽根401,〜,404が矢印R1の方向に順次移動することにより、紛体が回転羽根401,〜,404によりおされて、掻き出し部730に接触し、排出口600から下方に所定量ずつ排出される。この場合、ガイド部材700の掻き出し部730が排出口600の開口部の鉛直上方を覆っているため、ガイド部材700よりも鉛直上方向に供給された紛体の全自重が排出口600から排出される粉体に加わることを防止することができる。そのため、円筒体200内に投入された紛体の量に左右されず、所定量の紛体を排出口600から確実に供給することができる。
【0044】
(他の例)
次に、図5は、図4に示したガイド部材700の他の例を示す模式図である。
【0045】
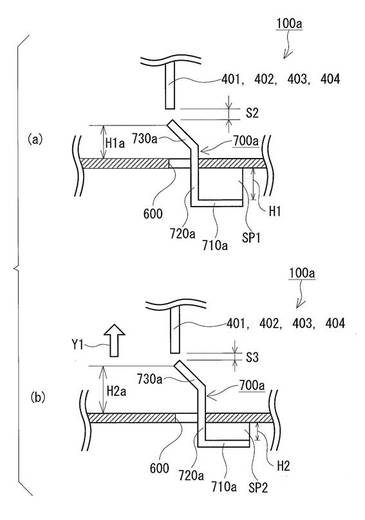
図5に示すように、紛体供給装置100aは、ガイド部材700の代わりにガイド部材700aおよびスペーサSP1,SP2を備える。
【0046】
まず、図5(a)に示すように、ガイド部材700aの固定部710aおよび円筒体200の底裏面との間に高さH1のスペーサSP1を設けることにより、掻き出し部730aと円筒体200の底面との距離H1aを設けることができ、さらに掻き出し部730aと回転羽根401,〜,404の隙間S2を設けることができる。
【0047】
また、図5(b)に示すように、ガイド部材700aの固定部710aおよび円筒体200の底面との間にスペーサSP1の代わりに高さH2(H1>H2)のスペーサSP2を設けることにより、ガイド部材700aを矢印Y1の方向に移動させることができ、掻き出し部730aと円筒体200の底面との距離H1aを距離H2aに変化させることができ、さらに掻き出し部730aと回転羽根401,〜,404の隙間S2を隙間S3(S2>S3)に変更することができる。したがって、ガイド部材700aは、円筒体200の底面から掻き出し部730aの先端までの距離を変化させることができる。その結果、排出口600から供給される粉体の量は、円筒体200と掻き出し部730aとの距離H1a、H2aに依存するため、粉体の供給量を調整することができる。
【0048】
(さらに他の例)
図6は、ガイド部材700のさらに他の例を示す模式図である。
【0049】
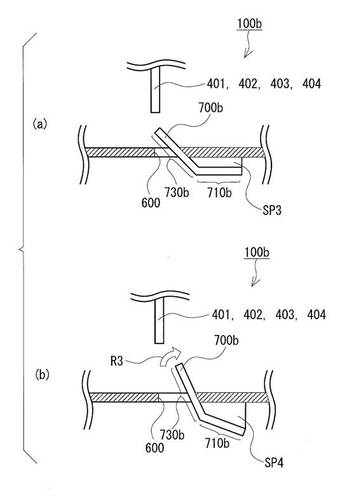
図6に示すように、紛体供給装置100bは、ガイド部材700の代わりにガイド部材700bおよびスペーサSP3,SP4を備える。ガイド部材700bは、固定部710b、および掻き出し部730bからなる。
【0050】
図6(a)に示すように、固定部710bと円筒体200の底裏面との間にスペーサSP3が設けられている。そして、図6(b)に示すように、スペーサSP3をスペーサSP4に変更することにより、ガイド部材700bの掻き出し部730bの傾斜角度を矢印R3の方向に変化させることができる。その結果、排出口600からの紛体の供給量を調整することができる。
【0051】
(さらに他の例)
次いで、図7は、ガイド部材700のさらに他の例を示す模式図である。
【0052】
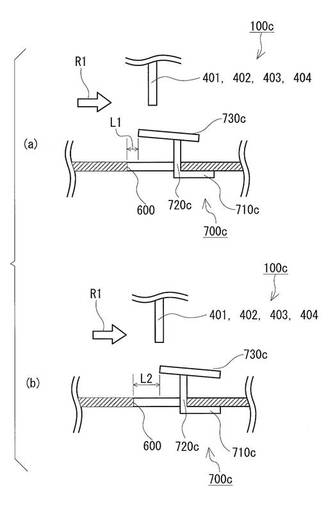
図7に示すように、紛体供給装置100cは、ガイド部材700の代わりにガイド部材700cを備える。ガイド部材700cは、固定部710c、垂直部720cおよびスライド掻き出し部730cからなる。
【0053】
図7(a)に示すように、ガイド部材700cの固定部710cが円筒体200の底裏面(外側)においてボルト等(図示せず)により固定される。また、ガイド部材700cの垂直部720cは、固定部710cと垂直に交差するよう設けられ、かつ排出口600の一端側に接触するように配設されている。それにより、ガイド部材700cの垂直部720cおよびスライド掻き出し部730cが円筒体200の内部に進入して設けられる。
【0054】
さらに、ガイド部材700cのスライド掻き出し部730cは、垂直部720と所定の角度で交差するように設けられる。図7(a)の場合、スライド掻き出し部730cにより排出口600の開口部は、距離L1の幅で形成される。一方、図7(b)に示すように、スライド掻き出し部730cが矢印R1の方向にスライド移動することにより、排出口600の開口部は、距離L2(L1<L2)の幅に変化させることができる。その結果、排出口600からの紛体の供給量を調整することができる。
【0055】
(さらに他の例)
次いで、図8は、ガイド部材700のさらに他の例を示す模式図である。
【0056】
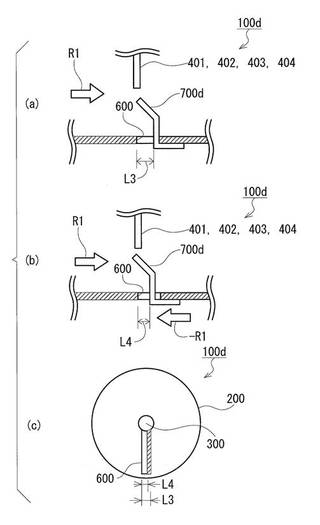
図8に示すように、紛体供給装置100dは、ガイド部材700の代わりにガイド部材700dを備える。ガイド部材700dは、円筒体200の底裏面に取り付けるための長孔部を有する。
【0057】
図8(a)に示すように、ガイド部材700dの長孔部の一方側を円筒体200の底裏面に取り付けた場合、ガイド部材700dの垂直部が排出口600の一端側に接触している。また、図8(b)に示すように、ガイド部材700dの長孔部の他方側を円筒体200の底裏面に取り付けた場合、ガイド部材700dの垂直部が排出口600の一端側に接触せず、排出口600の中央近傍まで、矢印R1の逆方向(矢印−R1の方向)に移動する。
【0058】
その結果、図8(a)に示す排出口600の幅L3を、図8(b)に示す排出口600の幅L4に変化させることができる。その結果、図8(c)に示すように、排出口600の面積をガイド部材700dによりハッチング分変化させることができ、排出口600からの粉体の供給量を調整することができる。
【0059】
(さらに他の例)
次に、図9は、図8に示したガイド部材700dの他の例を示す模式図である。
【0060】
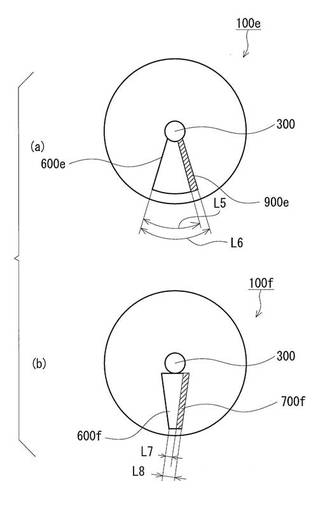
図9(a)に示すように、紛体供給装置100eにおいては、排出口600eは、軸300から放射状に形成されている。その結果、ガイド部材700eがスライド移動することにより、図7(a)に示す排出口600eの幅L5を幅L6に変化させることができ、排出口600eの面積をガイド部材700eにより変化させることができる。したがって、排出口600eからの粉体の供給量を調整することができる。
【0061】
また、図9(b)に示すように、紛体供給装置100fにおいては、排出口600fは、軸300から外側に連れて面積が細くなるよう形成されている。その結果、ガイド部材700fがスライド移動することにより、図7(b)に示す排出口600fの幅L7を幅L8に変化させることができ、排出口600fの面積をガイド部材700fにより変化させることができる。したがって、排出口600fからの粉体の供給量を調整することができる。
【0062】
(さらに他の例)
図10は、回転羽根401,〜,404の他の例を示す模式図である。
【0063】
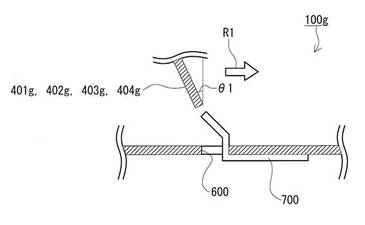
図10に示すように、紛体供給装置100gにおいては、回転羽根401g,〜,404gが軸300および進行方向(矢印R1)に対してすくい角が生じるように、角度θ1傾斜して設けられる。その結果、排出口600からの供給量を調整することができ、排出口600からの粉体の供給量を調整することができる。
【0064】
(さらに他の例)
図11は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0065】
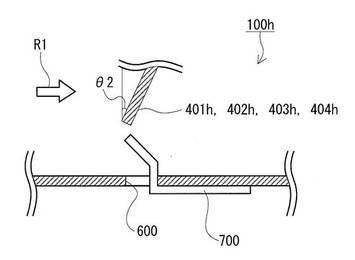
図11に示すように、紛体供給装置100hにおいては、回転羽根401h,〜,404hが軸300および進行方向(矢印R1)に対して抑え角となるよう角度θ2傾斜して設けられる。その結果、排出口600からの粉体の供給量を調整することができる。
【0066】
この場合、回転羽根の羽根が、垂直方向に対して傾斜して設けられるので、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
例えば、ガイド部材に対して迎え角を有する場合には、粉体を円筒体の底部に対して押し出すように力が加わるため、紛体の大量排出に適し、迎え角と逆の傾斜を有する場合には、少量排出に適する。
【0067】
(さらに他の例)
図12は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0068】
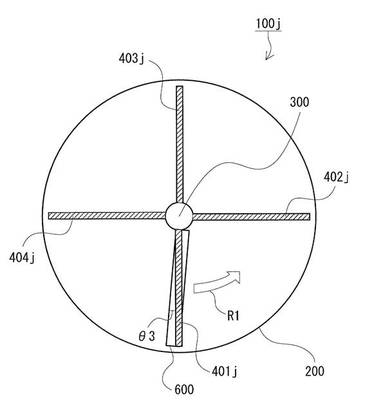
図12に示すように、紛体供給装置100jにおいては、軸300を中心として放射状に配置された回転羽根401j,〜,404jが、排出口600の対角となる位置を同時に通過するように排出口600が配置されている。
すなわち、放射状に配置された回転羽根401j,〜,404jに対して排出口600が角度θ3だけずれて配設される。
【0069】
その結果、回転羽根401j,〜,404jが排出口600に一度に圧力を掛けて紛体を排出するのではなく、排出口600の外側から内側に連れて徐々に圧力を掛けて排出を行うことができる。その結果、大きな力が回転羽根401j,〜,404jに一度に加わることを防止することができる。
【0070】
すなわち、排出口600が回転羽根401j,〜,404jの回転軸からの放射方向に対して傾斜して設けられるので、回転羽根401j,〜,404jが回転して紛体が排出されるタイミングが排出口600の全域において移動するので、回転羽根401j,〜,404jのトルクを下げることができる。また、粉体を排出するタイミングが移動するので、排出口600における粉体の詰りを防止することができる。また、モータ500のトルク負荷を軽減することができる。
【0071】
(さらに他の例)
図13は、回転羽根401k,〜,404kのさらに他の例を示す模式図である。
【0072】
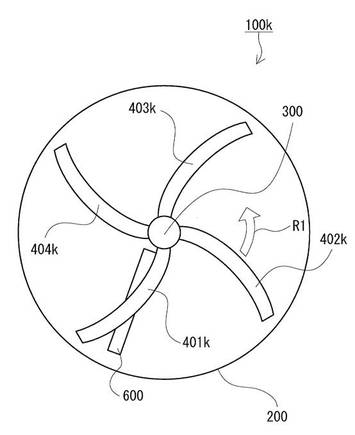
図13に示すように、紛体供給装置100kにおいて回転羽根401k,〜,404kは、上方から見て湾曲形状からなる。この場合、円筒体200の内側から外側に向けて紛体が移動されつつ、紛体が排出口600から排出される。また、回転羽根401k,〜,404kが排出口600に一度に圧力を掛けて紛体を排出するのではなく、排出口600の外側から内側に連れて徐々に圧力を掛けて排出を行うことができる。その結果、大きな力が回転羽根401k,〜,404kに一度に加わることを防止することができ、モータ500のトルク負荷を軽減することができる。
【0073】
(さらに他の例)
次に、図14は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0074】
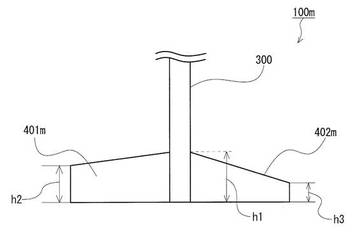
図14に示すように、回転羽根401m,〜,404mは、軸300の近傍においては、羽根高さh1を有する。また、回転羽根401mの最外端は、羽根高さh2(h1>h2)を有し、回転羽根402mの最外端は、羽根高さh3(h1>h3)を有する。
また、図示していないが、回転羽根403mの最外端は、羽根高さh4を有し、回転羽根404mの最外端は、羽根高さh5を有する。
なお、羽根高さh3、h4、h5は、羽根高さh2と同じ値であってもよく、異なる値であってもよい。
【0075】
この場合、回転羽根401m,〜,404mの高さが最外端に向かうに連れて低くなるので、円筒体200内の最外端に溜まり易い紛体に対して、最外端においては、少量の粉体に圧力を与え、軸300側の紛体には、大量の紛体に圧力を与えることで、排出口600から均一に紛体を排出することができる。その結果、安定排出を実現することができる。
【0076】
(さらに他の例)
次に、図15は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0077】
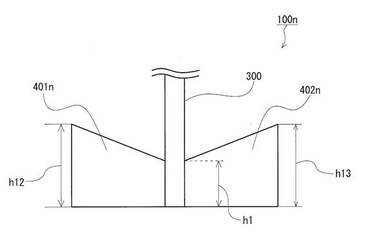
図15に示すように、回転羽根401n,〜,404nは、軸300の近傍においては、羽根高さh1を有する。また、回転羽根401nの最外端は、羽根高さh12(h1<h12)を有し、回転羽根402nの最外端は、羽根高さh13(h1<h13)を有する。すなわち、回転羽根401n,〜,404nは、軸300の中心に頂角を有するように形成されている。
また、図示していないが、回転羽根403nの最外端は、羽根高さh14を有し、回転羽根404nの最外端は、羽根高さh15を有する。
なお、羽根高さh13、h14、h15は、羽根高さh12と同じ値であってもよく、異なる値であってもよい。
【0078】
この場合、回転羽根401n,〜,404nの高さが最外端に向かうに連れて高くなるので、円筒体200内の軸300に溜まり易い紛体に対して、最外端においては、大量の粉体に圧力を与え、軸300側の紛体には、少量の紛体に圧力を与えることで、排出口600から均一に紛体を排出することができる。その結果、安定排出を実現することができる。
【0079】
(本実施形態における効果)
以上のように、本実施形態に係る紛体供給装置100によれば、回転羽根401,〜,404の回転およびガイド部材700により積極的に紛体を掻き出すことができる。その結果、塊状となり易い紛体、または粘性を有する紛体であっても、排出口600から確実に排出を行うことができる。
【0080】
また、本実施の形態に係るガイド部材700においては、掻き出し部730が排出口600の開口部鉛直上方の大部分を覆っているため、ガイド部材700よりも鉛直上方向に供給された紛体の全自重が排出口600から排出される粉体に加わることを防止することができる。その結果、排出口600から紛体の全自重による力で、紛体が排出されることを防止できる。
【0081】
また、回転羽根401,〜,404を回転させることにより、円筒体200内の底部近傍の紛体に攪拌作用を与え、排出の安定性を実現するとともに、排出口600における詰まりを防止することができる。
【0082】
また、計量装置960により円筒体200全体の計量を行うことができる。その結果、円筒体200および紛体の合計である計量値から、変化した計量値が、排出された紛体の計量値となるので、確実に排出された紛体の供給量を算出することができる。
【0083】
また、紛体供給装置100のガイド部材700にスペーサSP1,SP2、スペーサSP3,SP4を設けることによりガイド部材700の掻き出し部730の該ガイド部材700の円筒体底部からの高さまたは角度を調整することができる。その結果、円筒体200に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。
さらに、紛体供給装置100の排出口600の幅をガイド部材700またはスライド掻き出し部730により排出口600の幅を変化させることができるので、円筒体200に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置100の汎用性を向上させることができる。
【0084】
(請求項の各構成要素と上記実施形態の各構成部との対応関係)
上記実施形態においては、円筒体200が円筒体に相当し、回転羽根401,〜,404が回転羽根に相当し、排出口600が排出口に相当し、紛体供給装置100が粉体供給装置に相当し、ガイド部材700がガイド部材に相当し、スペーサSP1,SP2が高さ調整機構に相当し、スライド掻き出し部730cまたはガイド部材700が排出口幅調整機構に相当し、計量装置960が計量装置に相当し、スペーサSP3,SP4が角度調整部に相当する。
【0085】
(変形例)
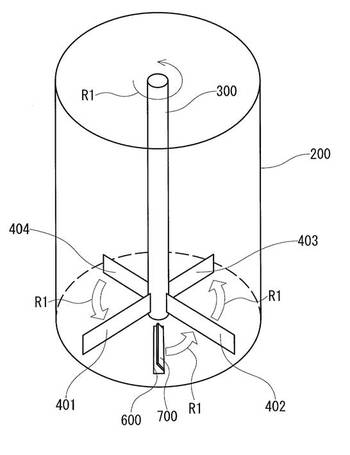
図16は、本実施形態に係る紛体供給装置100pの筒体の内部構造の他の例を説明するための模式図である。
【0086】
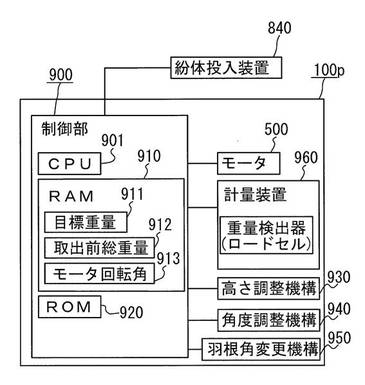
図16における紛体供給装置100pは、図2の紛体供給装置100にさらに、ガイド部材700の高さ調整機構930、ガイド部材700の角度調整機構940、回転羽根401,〜,404の羽根角変更機構950をさらに備える。
【0087】
ガイド部材700の高さ調整機構930は、スペーサSP1,SP2の代わりに、ガイド部材700の鉛直方向の移動を行う。また、角度調整機構940は、スペーサSP3,SP4の代わりに、ガイド部材700の角度θ方向の回動を行う。さらに、羽根角変更機構950は、軸300内に設けられ、回転羽根401,〜,404の角度θ1,θ2の角度調整を行う。
【0088】
具体的に、紛体制御装置100pのテスト時において、制御部900のCPU901は、計量装置960により検出した負荷を受信し続ける。CPU901は、所定時間後に取出前総重量データ912から、受信した現在の計量装置960の負荷を減算して、実際に供給された紛体の供給量を算出し、該供給量を目標重量データ911と比較する。
その結果、目標重量データ911と差がある場合には、モータ500、ガイド部材700の高さ調整機構930、ガイド部材700の角度調整機構940、回転羽根401,〜,404の羽根角変更機構950のうち、1の機構または複数の機構の制御を行う。そして、再度、実際に供給された紛体の供給量を算出し、該供給量を目標重量データ911と比較し、目標重量データ911と差がない場合に、当該制御を維持して、本格的なランニングを行う。
【0089】
また、本実施の形態においては、回転羽根401,〜,404を4枚の羽根部材からなることとしているが、これに限定されず、他の任意の数の羽根部材からなることとしてもよい。
【0090】
さらに、本実施の形態においては、袋C内に紛体を供給することとしているが、これに限定されず、排出口600の下方に容器、スクリュー搬送機またはベルトコンベア等を配置し、容器内、スクリュー搬送機内またはベルトコンベア上に紛体を供給してもよい。
なお、その場合、CPU901は、容器の場合にモータ500の駆動を、上記実施と同様に間欠駆動させ、ベルトコンベアの場合には、連続駆動させる。
【0091】
また、袋Cまたは容器の下方に、別途計量センサを配置し、袋C自身または容器自身を計量してもよい。
【0092】
(請求項の各構成要素と変形例における各構成部との対応関係)
上記実施形態においては、円筒体200が円筒体に相当し、回転羽根401,〜,404が回転羽根に相当し、排出口600が排出口に相当し、紛体供給装置100pが粉体供給装置に相当し、ガイド部材700がガイド部材に相当し、高さ調整機構930が高さ調整機構に相当し、スライド掻き出し部730cまたはガイド部材700dが排出口幅調整機構に相当し、計量装置960が計量装置に相当し、羽根角変更機構950が水平角度調整機構に相当し、角度調整機構940が角度調整部に相当する。
【0093】
さらに、本発明の好ましい一実施の形態は上記の通りであるが、本発明はそれだけに制限されない。本発明の精神と範囲から逸脱することのない様々な実施形態が他になされることは理解されよう。さらに、本実施形態において、本発明の構成による作用および効果を述べているが、これらの作用および効果は、一例であり、本発明を限定するものではない。
【符号の説明】
【0094】
100 紛体供給装置
200 円筒体
401,〜,404 回転羽根
600 排出口
700 ガイド部材
730c スライド掻き出し部
960 計量装置
SP1,SP2 スペーサ
SP3,SP4 スペーサ
【技術分野】
【0001】
本発明は、粉体を定量的に供給する紛体供給装置に関する。
【背景技術】
【0002】
従来、紛体を定量的に取り出すために、紛体供給装置が使用されている。これらの紛体供給装置に関して日々研究開発が行われている。
【0003】
例えば、特許文献1には、紛体を定量的に取り出すことができる定量取出装置が開示されている。
【0004】
特許文献1記載の定量取出装置は、粉粒状物を収容する空間を形成する一時貯留装置と、該一時貯留装置内の粉粒状物を下方から支持すると共に、略鉛直な軸線のまわりに回転して一時貯留装置内の粉粒状物を回転移動させる支持板と、一時貯留装置の側壁の下端部に形成され粉粒状物を取り出すための取出口と、取出口の近傍において一時貯留装置の内部に向って突出するスクレーパとを設け、支持板により運ばれた粉粒状物の一部をスクレーパで受け止めて、該スクレーパにより取出口に向って案内し、更に、取出口から排出して取り出すようにしたものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−77250号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1記載の定量取出装置では、紛粒状物に圧縮力をかけることなく粉状物を一定量取り出すことができる。
しかしながら、特許文献1記載の定量取出装置では、粘性の低い紛体の場合、適切に紛体を定量ずつ排出することができるが、粘性の高い紛体の場合、排出口において紛体が塊状となり、安定して供給することが困難となる。
【0007】
本発明の目的は、所定量の粉体を確実に供給することができる粉体供給装置を提供することである。
【課題を解決するための手段】
【0008】
(1)
本発明に係る粉体供給装置は、円筒体の上部開口部より粉体を投入し、該投入され貯留された粉体を円筒体内の底部に設けられた回転羽根を水平回転させることで、円筒体底部に設けられた排出口より紛体を供給する粉体供給装置であって、排出口に設けられ、回転羽根の回転上流側に向かって、かつ、円筒体底面に対して傾斜したガイド部材を含む。
【0009】
本発明に係る紛体供給装置においては、ガイド部材が、排出口に設けられ、かつ円筒体底面に対して傾斜して設けられる。
【0010】
この場合、投入され貯留された紛体の自重により円筒体の底部、すなわち排出口近傍に粉体を移動させることができる。また、塊状となり易い紛体、または粘性を有する紛体であっても、回転羽根によりおされ、ガイド部材により紛体が受け止められ、排出口から確実に所定量の紛体の供給を行うことができる。
また、回転羽根を回転させることにより、円筒体内の底部近傍の紛体に攪拌作用を与え、供給の安定性を実現するとともに、排出口における詰まりを防止することができる。すなわち、円筒体内に投入された紛体の自重が、傾斜したガイド部材により支持されるので、直接排出口近傍の紛体に紛体の自重が加わることを防止することができる。その結果、供給の安定性を実現することができる。
【0011】
(2)
第2の発明に係る粉体供給装置において、ガイド部材は、円筒体底部に対して高さを調整する高さ調整機構を備えるものである。
【0012】
この場合、ガイド部材の高さ調整機構により、該ガイド部材の円筒体底部からの高さが、調整される。その結果、円筒体に投入され、貯留された同一性状の紛体に対して紛体の供給量を調整することができる。さらに、円筒体に該紛体と異なる性状の紛体が投入された場合でも、当該異なる性状の紛体に応じて紛体の供給量を調整することができる。すなわち、紛体の異なる性状に対しても、高さを調整することができ、詰り、または塊状(だま状)を防止することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0013】
(3)
第3の発明に係る紛体供給装置において、ガイド部材は、排出口の開口幅を調整する排出口幅調整機構を備える。
【0014】
この場合、ガイド部材の排出口幅調整機構により、排出口の開口幅が調整される。その結果、円筒体に投入され、貯留された同一性状の紛体に対して紛体の供給量を調整することができる。さらに、円筒体に該紛体と異なる性状の紛体が投入された場合でも、当該異なる性状の紛体に応じて紛体の供給量を調整することができる。すなわち、紛体の異なる性状に対しても、排出幅を調整することができ、詰り、または塊状(だま状)を防止することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0015】
(4)
第4の発明に係る紛体供給装置は、円筒体を支持し、計量を行う計量装置をさらに備える。
【0016】
この場合、計量装置により円筒体全体の計量を行うことができる。その結果、円筒体および該円筒体内に投入された貯留された紛体の計量値から、供給された紛体の計量値を算出することができる。したがって、確実に供給された紛体の計量を行うことができる。
【0017】
(5)
第5の発明に係る紛体供給装置において、ガイド部材は、円筒体底面に対する傾斜角度を調整する角度調整部をさらに備える。
【0018】
この場合、ガイド部材の傾斜角度部材により、該ガイド部材の円筒体底面に対する傾斜角度を調整することができる。その結果、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0019】
(6)
第6の発明に係る紛体供給装置において、ガイド部材は、水平視角度を調整する水平角度調整機構を備える。
【0020】
この場合、水平角度調整機構によりガイド部材の水平視角度を調整することができる。その結果、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
【0021】
(7)
第7の発明に係る紛体供給装置において、水平視角度は、回転羽根の回転軸の中心に頂角を持つ。
【0022】
この場合、紛体が回転羽根により攪拌される場合、回転羽根の軸に近い方から粉体が供給され、供給されない紛体が該回転羽根の軸に遠い方に移動され、供給される。したがって、排出口から均一に紛体を供給することができる。
【0023】
(8)
第8の発明に係る紛体供給装置において、ガイド部材は、円筒体の底部外側より該円筒体の内側に延設する。
【0024】
この場合、ガイド部材は、円筒体の底部外側より該円筒体の内側に延設して設けられるので、ガイド部材により排出口に案内された円筒体内の紛体を、円滑に円筒体の底部の外側に供給することができる。
【0025】
(9)
第9の発明に係る紛体供給装置において、排出口は、回転羽根の回転軸からの放射方向に対して傾斜して設けられる。
【0026】
この場合、排出口が回転羽根の回転軸からの放射方向に対して傾斜して設けられるので、回転羽根が回転して紛体が排出されるタイミングが排出口の全域において移動するので、回転羽根のトルクを下げることができる。また、粉体を排出するタイミングが移動するので、排出口の詰りを防止することができる。
【0027】
(10)
第10の発明に係る紛体供給装置において、回転羽根の羽根は、垂直方向に対して傾斜して設けられる。
【0028】
この場合、回転羽根の羽根が、垂直方向に対して傾斜して設けられるので、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
例えば、ガイド部材に対して迎え角を有する場合には、粉体を円筒体の底部に対して押し出すように力が加わるため、紛体の大量排出に適し、迎え角と逆の傾斜を有する場合には、少量排出に適する。
【0029】
(11)
第11の発明に係る紛体供給装置において、制御部をさらに備え、制御部は、回転羽根の駆動を制御する。制御部は、計量装置からの計量値に基づいて、モータの駆動を制御する。制御部は、高さ調整機構を制御する。制御部は、排出口幅調整機構を制御する。制御部は、角度調整部を制御する。水平角度調整機構を制御する。
【0030】
この場合、排出口からの粉体の供給量を所定量に調整することができる。
【図面の簡単な説明】
【0031】
【図1】本実施形態に係る紛体供給装置の一例を示す模式的外観図である。
【図2】本実施形態に係る紛体供給装置の構成の一例を示す模式図である。
【図3】本実施形態に係る紛体供給装置の筒体の内部構造を説明するための模式図である。
【図4】図3に示した排出口、ガイド部材の位置関係を説明するための模式的断面図である。
【図5】図4に示したガイド部材の他の例を示す模式図である。
【図6】ガイド部材のさらに他の例を示す模式図である。
【図7】ガイド部材のさらに他の例を示す模式図である。
【図8】ガイド部材のさらに他の例を示す模式図である。
【図9】図8に示したスライド部材の他の例を示す模式図である。
【図10】回転羽根の他の例を示す模式図である。
【図11】回転羽根のさらに他の例を示す模式図である。
【図12】回転羽根のさらに他の例を示す模式図である。
【図13】回転羽根のさらに他の例を示す模式図である。
【図14】回転羽根のさらに他の例を示す模式図である。
【図15】回転羽根のさらに他の例を示す模式図である。
【図16】本実施形態に係る紛体供給装置の筒体の内部構造の他の例を説明するための模式図である。
【発明を実施するための最良の形態】
【0032】
以下、本発明の一実施形態に係る紛体供給装置について図面を参照しながら説明する。
【0033】
図1は本実施形態に係る紛体供給装置100の一例を示す模式図であり、図2は、本実施形態に係る紛体供給装置100の構成の一例を示す模式図であり、図3は本実施形態に係る紛体供給装置100の円筒体200の内部構造を説明するための模式図である。
【0034】
図1および図3に示すように、紛体供給装置100は、主に紛体投入装置840の下方に配置される。すなわち、紛体供給装置100は、紛体投入装置840から投入された紛体を、袋Cに所定量ずつ供給するものである。紛体供給装置100は、主に円筒体200、軸300、回転羽根401,〜,404、モータ500、ガイド部材700、制御部900および筐体970からなる。
【0035】
また、図1に示すように、モータ500が配設されており、モータ500の駆動力がベルト510を介して、軸300に与えられる。また、図1および図3に示すように、円筒体200の上面は開口して設けられ、紛体投入装置840から紛体が投入可能に設けられる。
また、紛体供給装置100の円筒体200の筒中央に鉛直方向に延在した軸300が設けられる。軸300の上端には、モータ500が設けられており、下端は円筒体200の底部に軸回転可能に固定され、下端部近傍には、回転羽根401,〜,404が設けられる。回転羽根401,〜,404は、軸300に90度ずつ均等に配設されている。また、円筒体200の底面には、排出口600が設けられ、袋Cの間には、漏斗550が設けられる。
【0036】
図3に示すように、モータ500が駆動されることにより、軸300が矢印R1の方向に回転し、回転羽根401,〜,404が矢印R1の方向に従動回転する。その結果、円筒体200の上面開口部から投入された紛体が、回転羽根401,〜,404に攪拌されるとともに、回転羽根401,〜,404によりおされた紛体がガイド部材700を介して排出口600から定量ずつ排出される。
【0037】
また、図2に示すように、制御部900は、CPU(中央制御装置)901、RAM(ランダムアクセスメモリ)910、ROM(リードオンリメモリ)920を含む。
【0038】
制御部900のCPU901は、RAM910に目標重量データ911、取出前総重量データ912およびモータ回転角データ(パルス数)913等を記録する。
ここで、目標重量データ911は、供給すべき粉体の総重量が記録されたデータであり、取出前総重量データ912は、モータ500を回転させる前の紛体供給装置100の全重量、すなわち、紛体供給装置100および紛体の合計重量で、かつモータ500が回転される度に記録されたデータであり、モータ回転角データ913は、供給時に回転したモータ500の回転角を記録したデータである。
【0039】
また、図2に示すように、計量装置960は、重量検出器(ロードセル)からなる。制御部900は、計量装置960により検出した負荷を受信して、紛体投入装置840を制御するとともに、モータ500の駆動を制御する。
【0040】
本実施の形態における制御部900は、計量装置960により検出された負荷の変化に基づいて、紛体供給装置100から供給された紛体の重量を求める。
すなわち、制御部900のCPU901は、取出前総重量データ912から現在の計量装置960の負荷を減算して、実際に袋C内に供給された紛体の供給量を算出し、該供給量を目標重量データ911と比較して、モータ500のフィードバック駆動(間欠駆動または所定駆動)を行う。
【0041】
(ガイド部材700)
次に、図4は、図3に示した排出口600、ガイド部材700の位置関係を説明するための模式的断面図である。
【0042】
図4に示すように、ガイド部材700は、固定部710、垂直部720および掻き出し部730からなる。本実施の形態においては、図4に示すように、ガイド部材700の固定部710が円筒体200の底裏面(外側)においてボルト等(図示せず)により固定される。また、ガイド部材700の垂直部720は、固定部710と垂直に交差するよう設けられ、かつ排出口600の一端側に接触するように配設されている。それにより、ガイド部材700の垂直部720および掻き出し部730が円筒体200の内部に進入して設けられる。また、掻き出し部730は、排出口600の開口部の鉛直上方向を覆うように設けられている。
さらに、ガイド部材700の掻き出し部730は、垂直部720から矢印R1と逆方向に角度θ傾斜して設けられる。ここで、角度θは、−90度以上90度以下の範囲からなる。
【0043】
また、図4に示すように、掻き出し部730の先端は、回転羽根401,〜,404と隙間S1の間隔を維持して設けられる。回転羽根401,〜,404が矢印R1の方向に順次移動することにより、紛体が回転羽根401,〜,404によりおされて、掻き出し部730に接触し、排出口600から下方に所定量ずつ排出される。この場合、ガイド部材700の掻き出し部730が排出口600の開口部の鉛直上方を覆っているため、ガイド部材700よりも鉛直上方向に供給された紛体の全自重が排出口600から排出される粉体に加わることを防止することができる。そのため、円筒体200内に投入された紛体の量に左右されず、所定量の紛体を排出口600から確実に供給することができる。
【0044】
(他の例)
次に、図5は、図4に示したガイド部材700の他の例を示す模式図である。
【0045】
図5に示すように、紛体供給装置100aは、ガイド部材700の代わりにガイド部材700aおよびスペーサSP1,SP2を備える。
【0046】
まず、図5(a)に示すように、ガイド部材700aの固定部710aおよび円筒体200の底裏面との間に高さH1のスペーサSP1を設けることにより、掻き出し部730aと円筒体200の底面との距離H1aを設けることができ、さらに掻き出し部730aと回転羽根401,〜,404の隙間S2を設けることができる。
【0047】
また、図5(b)に示すように、ガイド部材700aの固定部710aおよび円筒体200の底面との間にスペーサSP1の代わりに高さH2(H1>H2)のスペーサSP2を設けることにより、ガイド部材700aを矢印Y1の方向に移動させることができ、掻き出し部730aと円筒体200の底面との距離H1aを距離H2aに変化させることができ、さらに掻き出し部730aと回転羽根401,〜,404の隙間S2を隙間S3(S2>S3)に変更することができる。したがって、ガイド部材700aは、円筒体200の底面から掻き出し部730aの先端までの距離を変化させることができる。その結果、排出口600から供給される粉体の量は、円筒体200と掻き出し部730aとの距離H1a、H2aに依存するため、粉体の供給量を調整することができる。
【0048】
(さらに他の例)
図6は、ガイド部材700のさらに他の例を示す模式図である。
【0049】
図6に示すように、紛体供給装置100bは、ガイド部材700の代わりにガイド部材700bおよびスペーサSP3,SP4を備える。ガイド部材700bは、固定部710b、および掻き出し部730bからなる。
【0050】
図6(a)に示すように、固定部710bと円筒体200の底裏面との間にスペーサSP3が設けられている。そして、図6(b)に示すように、スペーサSP3をスペーサSP4に変更することにより、ガイド部材700bの掻き出し部730bの傾斜角度を矢印R3の方向に変化させることができる。その結果、排出口600からの紛体の供給量を調整することができる。
【0051】
(さらに他の例)
次いで、図7は、ガイド部材700のさらに他の例を示す模式図である。
【0052】
図7に示すように、紛体供給装置100cは、ガイド部材700の代わりにガイド部材700cを備える。ガイド部材700cは、固定部710c、垂直部720cおよびスライド掻き出し部730cからなる。
【0053】
図7(a)に示すように、ガイド部材700cの固定部710cが円筒体200の底裏面(外側)においてボルト等(図示せず)により固定される。また、ガイド部材700cの垂直部720cは、固定部710cと垂直に交差するよう設けられ、かつ排出口600の一端側に接触するように配設されている。それにより、ガイド部材700cの垂直部720cおよびスライド掻き出し部730cが円筒体200の内部に進入して設けられる。
【0054】
さらに、ガイド部材700cのスライド掻き出し部730cは、垂直部720と所定の角度で交差するように設けられる。図7(a)の場合、スライド掻き出し部730cにより排出口600の開口部は、距離L1の幅で形成される。一方、図7(b)に示すように、スライド掻き出し部730cが矢印R1の方向にスライド移動することにより、排出口600の開口部は、距離L2(L1<L2)の幅に変化させることができる。その結果、排出口600からの紛体の供給量を調整することができる。
【0055】
(さらに他の例)
次いで、図8は、ガイド部材700のさらに他の例を示す模式図である。
【0056】
図8に示すように、紛体供給装置100dは、ガイド部材700の代わりにガイド部材700dを備える。ガイド部材700dは、円筒体200の底裏面に取り付けるための長孔部を有する。
【0057】
図8(a)に示すように、ガイド部材700dの長孔部の一方側を円筒体200の底裏面に取り付けた場合、ガイド部材700dの垂直部が排出口600の一端側に接触している。また、図8(b)に示すように、ガイド部材700dの長孔部の他方側を円筒体200の底裏面に取り付けた場合、ガイド部材700dの垂直部が排出口600の一端側に接触せず、排出口600の中央近傍まで、矢印R1の逆方向(矢印−R1の方向)に移動する。
【0058】
その結果、図8(a)に示す排出口600の幅L3を、図8(b)に示す排出口600の幅L4に変化させることができる。その結果、図8(c)に示すように、排出口600の面積をガイド部材700dによりハッチング分変化させることができ、排出口600からの粉体の供給量を調整することができる。
【0059】
(さらに他の例)
次に、図9は、図8に示したガイド部材700dの他の例を示す模式図である。
【0060】
図9(a)に示すように、紛体供給装置100eにおいては、排出口600eは、軸300から放射状に形成されている。その結果、ガイド部材700eがスライド移動することにより、図7(a)に示す排出口600eの幅L5を幅L6に変化させることができ、排出口600eの面積をガイド部材700eにより変化させることができる。したがって、排出口600eからの粉体の供給量を調整することができる。
【0061】
また、図9(b)に示すように、紛体供給装置100fにおいては、排出口600fは、軸300から外側に連れて面積が細くなるよう形成されている。その結果、ガイド部材700fがスライド移動することにより、図7(b)に示す排出口600fの幅L7を幅L8に変化させることができ、排出口600fの面積をガイド部材700fにより変化させることができる。したがって、排出口600fからの粉体の供給量を調整することができる。
【0062】
(さらに他の例)
図10は、回転羽根401,〜,404の他の例を示す模式図である。
【0063】
図10に示すように、紛体供給装置100gにおいては、回転羽根401g,〜,404gが軸300および進行方向(矢印R1)に対してすくい角が生じるように、角度θ1傾斜して設けられる。その結果、排出口600からの供給量を調整することができ、排出口600からの粉体の供給量を調整することができる。
【0064】
(さらに他の例)
図11は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0065】
図11に示すように、紛体供給装置100hにおいては、回転羽根401h,〜,404hが軸300および進行方向(矢印R1)に対して抑え角となるよう角度θ2傾斜して設けられる。その結果、排出口600からの粉体の供給量を調整することができる。
【0066】
この場合、回転羽根の羽根が、垂直方向に対して傾斜して設けられるので、円筒体に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置の汎用性を向上させることができる。
例えば、ガイド部材に対して迎え角を有する場合には、粉体を円筒体の底部に対して押し出すように力が加わるため、紛体の大量排出に適し、迎え角と逆の傾斜を有する場合には、少量排出に適する。
【0067】
(さらに他の例)
図12は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0068】
図12に示すように、紛体供給装置100jにおいては、軸300を中心として放射状に配置された回転羽根401j,〜,404jが、排出口600の対角となる位置を同時に通過するように排出口600が配置されている。
すなわち、放射状に配置された回転羽根401j,〜,404jに対して排出口600が角度θ3だけずれて配設される。
【0069】
その結果、回転羽根401j,〜,404jが排出口600に一度に圧力を掛けて紛体を排出するのではなく、排出口600の外側から内側に連れて徐々に圧力を掛けて排出を行うことができる。その結果、大きな力が回転羽根401j,〜,404jに一度に加わることを防止することができる。
【0070】
すなわち、排出口600が回転羽根401j,〜,404jの回転軸からの放射方向に対して傾斜して設けられるので、回転羽根401j,〜,404jが回転して紛体が排出されるタイミングが排出口600の全域において移動するので、回転羽根401j,〜,404jのトルクを下げることができる。また、粉体を排出するタイミングが移動するので、排出口600における粉体の詰りを防止することができる。また、モータ500のトルク負荷を軽減することができる。
【0071】
(さらに他の例)
図13は、回転羽根401k,〜,404kのさらに他の例を示す模式図である。
【0072】
図13に示すように、紛体供給装置100kにおいて回転羽根401k,〜,404kは、上方から見て湾曲形状からなる。この場合、円筒体200の内側から外側に向けて紛体が移動されつつ、紛体が排出口600から排出される。また、回転羽根401k,〜,404kが排出口600に一度に圧力を掛けて紛体を排出するのではなく、排出口600の外側から内側に連れて徐々に圧力を掛けて排出を行うことができる。その結果、大きな力が回転羽根401k,〜,404kに一度に加わることを防止することができ、モータ500のトルク負荷を軽減することができる。
【0073】
(さらに他の例)
次に、図14は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0074】
図14に示すように、回転羽根401m,〜,404mは、軸300の近傍においては、羽根高さh1を有する。また、回転羽根401mの最外端は、羽根高さh2(h1>h2)を有し、回転羽根402mの最外端は、羽根高さh3(h1>h3)を有する。
また、図示していないが、回転羽根403mの最外端は、羽根高さh4を有し、回転羽根404mの最外端は、羽根高さh5を有する。
なお、羽根高さh3、h4、h5は、羽根高さh2と同じ値であってもよく、異なる値であってもよい。
【0075】
この場合、回転羽根401m,〜,404mの高さが最外端に向かうに連れて低くなるので、円筒体200内の最外端に溜まり易い紛体に対して、最外端においては、少量の粉体に圧力を与え、軸300側の紛体には、大量の紛体に圧力を与えることで、排出口600から均一に紛体を排出することができる。その結果、安定排出を実現することができる。
【0076】
(さらに他の例)
次に、図15は、回転羽根401,〜,404のさらに他の例を示す模式図である。
【0077】
図15に示すように、回転羽根401n,〜,404nは、軸300の近傍においては、羽根高さh1を有する。また、回転羽根401nの最外端は、羽根高さh12(h1<h12)を有し、回転羽根402nの最外端は、羽根高さh13(h1<h13)を有する。すなわち、回転羽根401n,〜,404nは、軸300の中心に頂角を有するように形成されている。
また、図示していないが、回転羽根403nの最外端は、羽根高さh14を有し、回転羽根404nの最外端は、羽根高さh15を有する。
なお、羽根高さh13、h14、h15は、羽根高さh12と同じ値であってもよく、異なる値であってもよい。
【0078】
この場合、回転羽根401n,〜,404nの高さが最外端に向かうに連れて高くなるので、円筒体200内の軸300に溜まり易い紛体に対して、最外端においては、大量の粉体に圧力を与え、軸300側の紛体には、少量の紛体に圧力を与えることで、排出口600から均一に紛体を排出することができる。その結果、安定排出を実現することができる。
【0079】
(本実施形態における効果)
以上のように、本実施形態に係る紛体供給装置100によれば、回転羽根401,〜,404の回転およびガイド部材700により積極的に紛体を掻き出すことができる。その結果、塊状となり易い紛体、または粘性を有する紛体であっても、排出口600から確実に排出を行うことができる。
【0080】
また、本実施の形態に係るガイド部材700においては、掻き出し部730が排出口600の開口部鉛直上方の大部分を覆っているため、ガイド部材700よりも鉛直上方向に供給された紛体の全自重が排出口600から排出される粉体に加わることを防止することができる。その結果、排出口600から紛体の全自重による力で、紛体が排出されることを防止できる。
【0081】
また、回転羽根401,〜,404を回転させることにより、円筒体200内の底部近傍の紛体に攪拌作用を与え、排出の安定性を実現するとともに、排出口600における詰まりを防止することができる。
【0082】
また、計量装置960により円筒体200全体の計量を行うことができる。その結果、円筒体200および紛体の合計である計量値から、変化した計量値が、排出された紛体の計量値となるので、確実に排出された紛体の供給量を算出することができる。
【0083】
また、紛体供給装置100のガイド部材700にスペーサSP1,SP2、スペーサSP3,SP4を設けることによりガイド部材700の掻き出し部730の該ガイド部材700の円筒体底部からの高さまたは角度を調整することができる。その結果、円筒体200に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。
さらに、紛体供給装置100の排出口600の幅をガイド部材700またはスライド掻き出し部730により排出口600の幅を変化させることができるので、円筒体200に投入され、貯留された紛体の性状に対して紛体の供給量を調整することができる。したがって、紛体供給装置100の汎用性を向上させることができる。
【0084】
(請求項の各構成要素と上記実施形態の各構成部との対応関係)
上記実施形態においては、円筒体200が円筒体に相当し、回転羽根401,〜,404が回転羽根に相当し、排出口600が排出口に相当し、紛体供給装置100が粉体供給装置に相当し、ガイド部材700がガイド部材に相当し、スペーサSP1,SP2が高さ調整機構に相当し、スライド掻き出し部730cまたはガイド部材700が排出口幅調整機構に相当し、計量装置960が計量装置に相当し、スペーサSP3,SP4が角度調整部に相当する。
【0085】
(変形例)
図16は、本実施形態に係る紛体供給装置100pの筒体の内部構造の他の例を説明するための模式図である。
【0086】
図16における紛体供給装置100pは、図2の紛体供給装置100にさらに、ガイド部材700の高さ調整機構930、ガイド部材700の角度調整機構940、回転羽根401,〜,404の羽根角変更機構950をさらに備える。
【0087】
ガイド部材700の高さ調整機構930は、スペーサSP1,SP2の代わりに、ガイド部材700の鉛直方向の移動を行う。また、角度調整機構940は、スペーサSP3,SP4の代わりに、ガイド部材700の角度θ方向の回動を行う。さらに、羽根角変更機構950は、軸300内に設けられ、回転羽根401,〜,404の角度θ1,θ2の角度調整を行う。
【0088】
具体的に、紛体制御装置100pのテスト時において、制御部900のCPU901は、計量装置960により検出した負荷を受信し続ける。CPU901は、所定時間後に取出前総重量データ912から、受信した現在の計量装置960の負荷を減算して、実際に供給された紛体の供給量を算出し、該供給量を目標重量データ911と比較する。
その結果、目標重量データ911と差がある場合には、モータ500、ガイド部材700の高さ調整機構930、ガイド部材700の角度調整機構940、回転羽根401,〜,404の羽根角変更機構950のうち、1の機構または複数の機構の制御を行う。そして、再度、実際に供給された紛体の供給量を算出し、該供給量を目標重量データ911と比較し、目標重量データ911と差がない場合に、当該制御を維持して、本格的なランニングを行う。
【0089】
また、本実施の形態においては、回転羽根401,〜,404を4枚の羽根部材からなることとしているが、これに限定されず、他の任意の数の羽根部材からなることとしてもよい。
【0090】
さらに、本実施の形態においては、袋C内に紛体を供給することとしているが、これに限定されず、排出口600の下方に容器、スクリュー搬送機またはベルトコンベア等を配置し、容器内、スクリュー搬送機内またはベルトコンベア上に紛体を供給してもよい。
なお、その場合、CPU901は、容器の場合にモータ500の駆動を、上記実施と同様に間欠駆動させ、ベルトコンベアの場合には、連続駆動させる。
【0091】
また、袋Cまたは容器の下方に、別途計量センサを配置し、袋C自身または容器自身を計量してもよい。
【0092】
(請求項の各構成要素と変形例における各構成部との対応関係)
上記実施形態においては、円筒体200が円筒体に相当し、回転羽根401,〜,404が回転羽根に相当し、排出口600が排出口に相当し、紛体供給装置100pが粉体供給装置に相当し、ガイド部材700がガイド部材に相当し、高さ調整機構930が高さ調整機構に相当し、スライド掻き出し部730cまたはガイド部材700dが排出口幅調整機構に相当し、計量装置960が計量装置に相当し、羽根角変更機構950が水平角度調整機構に相当し、角度調整機構940が角度調整部に相当する。
【0093】
さらに、本発明の好ましい一実施の形態は上記の通りであるが、本発明はそれだけに制限されない。本発明の精神と範囲から逸脱することのない様々な実施形態が他になされることは理解されよう。さらに、本実施形態において、本発明の構成による作用および効果を述べているが、これらの作用および効果は、一例であり、本発明を限定するものではない。
【符号の説明】
【0094】
100 紛体供給装置
200 円筒体
401,〜,404 回転羽根
600 排出口
700 ガイド部材
730c スライド掻き出し部
960 計量装置
SP1,SP2 スペーサ
SP3,SP4 スペーサ
【特許請求の範囲】
【請求項1】
円筒体の上部開口部より粉体を投入し、該投入され貯留された粉体を前記円筒体内の底部に設けられた回転羽根を水平回転させることで、前記円筒体底部に設けられた排出口より前記紛体を排出する粉体供給装置であって、
前記排出口に設けられ、前記回転羽根の回転上流側に向かって、かつ、前記円筒体底面に対して傾斜したガイド部材を含むことを特徴とする粉体供給装置。
【請求項2】
前記ガイド部材は、前記円筒体底部に対して高さを調整する高さ調整機構を備えることを特徴とする請求項1記載の粉体供給装置。
【請求項3】
前記ガイド部材は、前記排出口の開口幅を調整する排出口幅調整機構を備えることを特徴とする請求項1または2に記載の紛体供給装置。
【請求項4】
前記円筒体を支持し、計量を行う計量装置をさらに備えたことを特徴とする請求項1から3のいずれか1項に記載の紛体供給装置。
【請求項5】
前記ガイド部材は、前記円筒体底面に対する傾斜角度を調整する角度調整部をさらに備えることを特徴とする請求項1から4のいずれか1項に記載の紛体供給装置。
【請求項6】
前記ガイド部材は、水平視角度を調整する水平角度調整機構を備えることを特徴とする請求項1から5のいずれか1項に記載の紛体供給装置。
【請求項7】
前記水平視角度は、前記回転羽根の回転軸の中心に頂角を持つことを特徴とする請求項6項に記載の紛体供給装置。
【請求項8】
前記ガイド部材は、前記円筒体の底部外側より該円筒体の内側に延設することを特徴とする請求項1から7のいずれか1項に記載の紛体供給装置。
【請求項9】
前記排出口は、前記回転羽根の回転軸からの放射方向に対して傾斜して設けられたことを特徴とする請求項1から8のいずれか1項に記載の紛体供給装置。
【請求項10】
前記回転羽根の羽根は、垂直方向に対して傾斜して設けられたことを特徴とする請求項1から9のいずれか1項に記載の紛体供給装置。
【請求項1】
円筒体の上部開口部より粉体を投入し、該投入され貯留された粉体を前記円筒体内の底部に設けられた回転羽根を水平回転させることで、前記円筒体底部に設けられた排出口より前記紛体を排出する粉体供給装置であって、
前記排出口に設けられ、前記回転羽根の回転上流側に向かって、かつ、前記円筒体底面に対して傾斜したガイド部材を含むことを特徴とする粉体供給装置。
【請求項2】
前記ガイド部材は、前記円筒体底部に対して高さを調整する高さ調整機構を備えることを特徴とする請求項1記載の粉体供給装置。
【請求項3】
前記ガイド部材は、前記排出口の開口幅を調整する排出口幅調整機構を備えることを特徴とする請求項1または2に記載の紛体供給装置。
【請求項4】
前記円筒体を支持し、計量を行う計量装置をさらに備えたことを特徴とする請求項1から3のいずれか1項に記載の紛体供給装置。
【請求項5】
前記ガイド部材は、前記円筒体底面に対する傾斜角度を調整する角度調整部をさらに備えることを特徴とする請求項1から4のいずれか1項に記載の紛体供給装置。
【請求項6】
前記ガイド部材は、水平視角度を調整する水平角度調整機構を備えることを特徴とする請求項1から5のいずれか1項に記載の紛体供給装置。
【請求項7】
前記水平視角度は、前記回転羽根の回転軸の中心に頂角を持つことを特徴とする請求項6項に記載の紛体供給装置。
【請求項8】
前記ガイド部材は、前記円筒体の底部外側より該円筒体の内側に延設することを特徴とする請求項1から7のいずれか1項に記載の紛体供給装置。
【請求項9】
前記排出口は、前記回転羽根の回転軸からの放射方向に対して傾斜して設けられたことを特徴とする請求項1から8のいずれか1項に記載の紛体供給装置。
【請求項10】
前記回転羽根の羽根は、垂直方向に対して傾斜して設けられたことを特徴とする請求項1から9のいずれか1項に記載の紛体供給装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−86912(P2012−86912A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−232430(P2010−232430)
【出願日】平成22年10月15日(2010.10.15)
【出願人】(599124909)株式会社イシダエンジニアリング (10)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月15日(2010.10.15)
【出願人】(599124909)株式会社イシダエンジニアリング (10)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]