
紡機におけるボビン供給装置
【課題】本発明の目的は、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送を可能とする紡機におけるボビン供給装置の提供にある。
【解決手段】補給された空ボビンBを案内するボビンシュート11と、ボビンシュート11と連結され、空ボビンBを貯留する下方に傾斜したボビン通路17及びペッグトレイ20に空ボビンBを供給する開口部18を有するボビンホルダ12とが設けられた紡機におけるボビン供給装置10において、ボビンシュート11の側壁11aとの間で空ボビンBの傾きを直立状態に復帰可能な範囲で規制する規制部26を備えたボビン姿勢制御部材23を設け、ボビン姿勢制御部材23の規制部26をボビンホルダ12のボビン通路17内に突出させる閉位置と、ボビン通路17内から退避させる開位置とに移動可能とする。
【解決手段】補給された空ボビンBを案内するボビンシュート11と、ボビンシュート11と連結され、空ボビンBを貯留する下方に傾斜したボビン通路17及びペッグトレイ20に空ボビンBを供給する開口部18を有するボビンホルダ12とが設けられた紡機におけるボビン供給装置10において、ボビンシュート11の側壁11aとの間で空ボビンBの傾きを直立状態に復帰可能な範囲で規制する規制部26を備えたボビン姿勢制御部材23を設け、ボビン姿勢制御部材23の規制部26をボビンホルダ12のボビン通路17内に突出させる閉位置と、ボビン通路17内から退避させる開位置とに移動可能とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ペッグトレイ上のペッグに空ボビンを供給する紡機におけるボビン供給装置に関するものである。
【背景技術】
【0002】
特許文献1で開示された従来技術では、空ボビン供給装置18が開示されており、空ボビン供給装置18は、空ボビン収容箱30、シュータ31及び空ボビン供給部32を備えている。空ボビン収容箱30の底部にはドラム34が回転可能に配設され、ドラム34の間欠回転により空ボビン収容箱30内に収容されている空ボビンEをシュータ31へと1本ずつ落下させる。
空ボビン供給部32は、前下がりに傾斜して複数の空ボビンEを載置可能な底壁32aを備え、その下方を移動するペッグトレイ2の移動方向前側が開放されており、底壁32aの先端にペッグトレイ2のペッグ2bの先端が通過可能な切り欠き部が形成されている。ペッグトレイ2はベルト13とガイド部材14に挟圧された状態で移動されている。
【0003】
シュータ31より空ボビン供給部32へ送り込まれた空ボビンEは、底壁32a上に所定本数貯留される。ペッグトレイ2の移動に伴い、ペッグ2bは空ボビン供給部32内の前端に位置する空ボビンEと係合し、ペッグ2bの移動とともに空ボビンEが空ボビン供給部32から排出される。先頭の空ボビンEが空ボビン供給部32から排出されると、後続の空ボビンEが前側に移動し、次のペッグ2bと係合可能な状態に配置される。この動作は繰り返し行われるが、空ボビン供給部32内の空ボビンEの数が所定本数以下になった時には、ドラム34が回動されて空ボビン収容箱30からシュータ31を介して空ボビンEが補給される。
【特許文献1】特開平9−111553(第6〜8頁、図4〜図5)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1で開示された従来技術では、システムの高速化のために、単位時間当りのペッグトレイ2の移送個数を増やすと、空ボビン供給部32よりペッグトレイ2へ移行する空ボビンEの単位時間当りの本数が増加し、空ボビン供給部32内に貯留されている空ボビンEの本数が一時的に少なくなる。一方、シュータ31内の空ボビンEの詰まりを防止するために、空ボビン収容箱30からシュータ31を介して補給される空ボビンEの単位時間当りの本数はあまり増加させられないため、空ボビンEの補給が追いつかず空ボビン供給部32内には大きな空きスペースが形成される。この状態で空ボビン収容箱30からシュータ31を介して空ボビンEが補給されると、補給された空ボビンEは、落下時の衝撃等により大きな空きスペースの内で倒れてしまい、空ボビン供給部32内でボビン詰まりが発生する問題がある。
【0005】
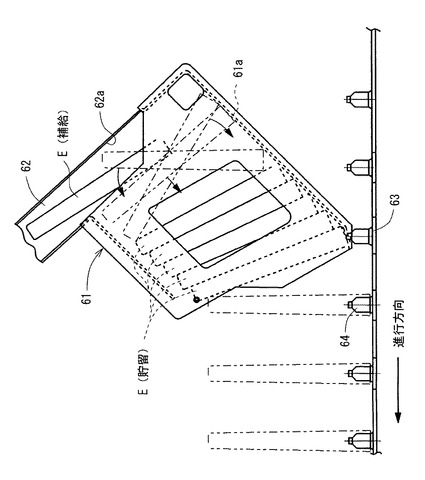
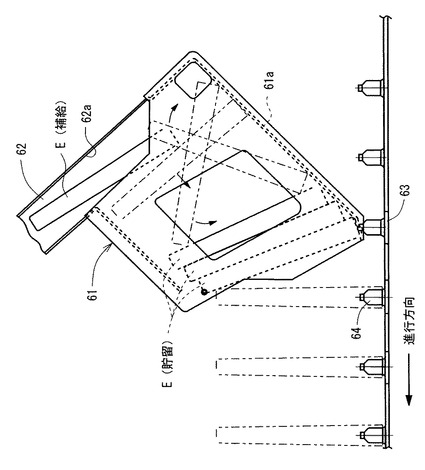
図7及び図8は、この時の状態を模式的に示したものであり、例えば、図7はペッグトレイを間欠的に2個ずつ送る場合を示し、図8はペッグトレイを間欠的に4個ずつ送る場合を示している。なお、この図においては、ペッグトレイ搬送用エアシリンダにより、ペッグトレイが間欠的に移動されることを想定しており、通常、シュータ62からのボビン供給速度よりもペッグトレイ搬送用エアシリンダの送り速度の方が速いため、シュータ62からの空ボビン供給よりも先に1ストローク分の空ボビンEの移行が完了する。
ボビン供給部61内に貯留される空ボビンEの所定本数を7本とすれば、図7に示す2個送りの場合には、2本の空ボビンEがボビン供給部61よりペッグトレイ63へ移行しても残留分が5本あり、ボビン供給部61内にはそれほど大きな空きスペースは形成されない。この状態でシュータ62を介して空ボビンEが補給されると、補給された空ボビンEは、仮想線で示すように底壁61aに対してほぼ直立状態で落下しそのまま前方に移動するもの以外に、落下時の衝撃等により、空ボビンEの大径部を後方に残したまま小径部が前方に傾いたものと、大径部を前方に向けて小径部が後方に傾いたものとが発生する。しかし、前後方向に傾いた空ボビンEは、既に貯留されている最後部の空ボビンEの後方側側面とシュータ62の側壁62aとの間で傾きが規制され、矢印で示すように重力の作用により、空ボビンEには傾きを修復するような力が作用し、姿勢が整えられた状態でボビン供給部61内に貯留される。従って、ボビン供給部61内でボビン詰まりが発生することは少ない。
【0006】
しかし、図8に示す4個送りの場合には、4本の空ボビンEがボビン供給部61よりペッグトレイ63へ移行すると残留分は3本となり、ボビン供給部61内には2個送りの場合に比べてかなり大きな空きスペースが形成される。前述の2個送りの場合と同様に、この状態でシュータ62を介して空ボビンEが補給されると、仮想線で示すように底壁61aに対してほぼ直立状態で落下しそのまま前方に移動するもの以外に、空ボビンEの大径部を後方に残したまま小径部が前方に傾いたものと、大径部を前方に向けて小径部が後方に傾いたものとが発生する。しかし、この場合には、空きスペースがかなり大きいので、前後方向に傾いた空ボビンEの傾きは図7における傾きと比較してかなり大きく、矢印で示すようにボビン供給部61内で、直立状態に復帰することなく前後に倒れてしまう。そのため、ボビン供給部61内でボビン詰まりが発生してしまう。
このように、システムの高速化のために単位時間当りのペッグトレイ63の移送個数を増やすとボビン供給部61内で補給された空ボビンEの倒れが発生し、ボビン詰まりが発生してしまう問題がある。
【0007】
本発明の目的は、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送を可能とする紡機におけるボビン供給装置の提供にある。
【課題を解決するための手段】
【0008】
上記課題を達成するため、請求項1記載の発明は、補給された空ボビンを案内するボビンシュートと、該ボビンシュートと連結され、前記空ボビンを貯留する下方に傾斜したボビン通路及びベッグトレイに前記空ボビンを供給する開口部を有するボビンホルダとが設けられた紡機におけるボビン供給装置において、前記ボビンシュートの側壁との間で前記空ボビンの傾きを直立状態に復帰可能な範囲で規制する規制部を備えたボビン姿勢制御手段を設け、該ボビン姿勢制御手段の規制部を前記ボビンホルダのボビン通路内に突出させる閉位置と、前記ボビン通路内から退避させる開位置とに移動可能としたことを特徴とする。
【0009】
請求項1記載の発明によれば、ボビンシュートの側壁との間で空ボビンの傾きを直立状態に復帰可能な範囲で規制する規制部を備えたボビン姿勢制御手段が設けられ、ボビン姿勢制御手段の規制部は、ボビンホルダのボビン通路内に突出させる閉位置と、ボビン通路内から退避させる開位置とに移動可能とされている。従って、ボビン姿勢制御手段の規制部をボビンホルダのボビン通路内に突出させた閉位置とすることにより、ボビンシュートを介して補給された空ボビンが規制部と当接し、空ボビンの姿勢が自重により直立状態に整えられる。そして、ボビン姿勢制御手段の規制部をボビン通路内から退避させる開位置に移動させることにより、姿勢が整えられた空ボビンはボビン通路内を下流側にそのまま移動し貯留される。よって、システムの高速化のために単位時間当りのペッグトレイの移送個数を増やすことによりボビンホルダ内に大きな空きスペースが形成されても、ボビン姿勢制御手段の規制部により空ボビンの姿勢を整えることができるので、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送が可能となる。
【0010】
請求項2記載の発明は、請求項1記載の紡機におけるボビン供給装置において、前記ボビン姿勢制御手段は、前記規制部に連設されたブラケットと、該ブラケットを回転可能に支持する支持軸とを備え、前記ブラケットに前記規制部を前記閉位置に回動させる方向の付勢力を有する付勢手段を装着したことを特徴とする。
【0011】
請求項2記載の発明によれば、ボビン姿勢制御手段は、規制部に連設されたブラケットと、該ブラケットを回転可能に支持する支持軸とを備え、ブラケットには規制部を閉位置に回動させる方向に付勢された付勢手段が装着されている。従って、規制部に空ボビンが当接していない状態においては、付勢手段の付勢力により、ブラケットはボビン通路内に規制部を突出させた閉位置に配置されている。この状態において、ボビンシュートを介して空ボビンが補給されると、規制部に空ボビンが当接してその姿勢が整えられる。直立状態に姿勢が整えられた空ボビンの側面全体が規制部と当接することにより、空ボビンの自重の大部分が規制部に作用し、ブラケットは支持軸を中心に付勢手段の付勢力とは反対方向に回動される。このとき、付勢手段の付勢力を適宜設定することにより、空ボビンの姿勢が規制部により直立状態に整えられた後に、規制部をボビン通路内から退避された開位置に移動させることが可能となる。そして、空ボビンはボビン通路内を下流側にそのまま移動し貯留される。よって、ボビン姿勢制御手段を開閉作動させるために、付勢手段を使用しているので、特別の駆動手段を用いる必要が無く、装置を簡略化できる。
【0012】
請求項3記載の発明は、請求項2に記載の紡機におけるボビン供給装置において、前記付勢手段がばねであることを特徴とする。
請求項3記載の発明によれば、付勢手段がばねで構成されるので、付勢力の調整が容易であり、支持軸に対して最小限のスペースで取り付けることができる。
【0013】
請求項4記載の発明は、請求項2に記載の紡機におけるボビン供給装置において、前記付勢手段がバランスウェイトであることを特徴とする。
請求項4記載の発明によれば、付勢手段がバランスウェイトで構成されるので、風綿等の堆積や、繰返し開閉動作に対して優れた耐久性を有する。
【0014】
請求項5記載の発明は、請求項1〜4のいずれか一項記載の紡機におけるボビン供給装置において、ボビン姿勢制御手段の規制部は、ボビンホルダのボビン通路内に貯留される前記空ボビンの側面に沿うように延びる平板状部材で構成される。
請求項5記載の発明によれば、ボビン姿勢制御手段の規制部が開位置を取ることによりボビン通路を前進する空ボビンがより安定した姿勢で貯留される。
【発明の効果】
【0015】
この発明によれば、ボビンホルダ内にボビン姿勢制御手段を設け、ボビン通路を開閉可能に制御することにより、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送が可能となる。
【発明を実施するための最良の形態】
【0016】
(第1の実施形態)
以下、本発明の第1の実施形態を図1〜図5に基づいて説明する。
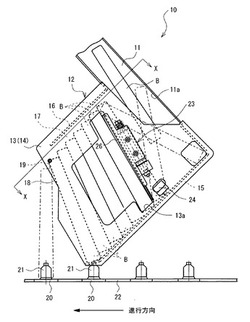
図1に示されるように、ボビン供給装置10は、補給された空ボビンBを案内するボビンシュート11と、ボビンシュート11と連結され補給された空ボビンBを貯留するボビンホルダ12を備えている。ボビンシュート11の上方に配置された図示しない空ボビン収納部より空ボビンBが一本ずつ補給され、補給された空ボビンBはボビンシュート11内で空ボビンBの大径部が下側となるようにその姿勢が変更されてボビンホルダ12内に落下する。
【0017】
ボビンホルダ12は左右一対のフレーム13、14と、フレーム13、14間の下方の端部に前下がりに傾斜配置された底板15と、上方の端部に前下がりに傾斜配置された天板16とで構成されている。尚、図1において左方向を前方、右方向を後方とし、図1における紙面と直角方向(表面より裏面に向かう方向)を左右方向とする。フレーム13、14、底板15及び天板16とで囲まれて前下がりに傾斜したボビン通路17が形成されている。
【0018】
ボビンホルダ12の前端部には、その下方を移動するペッグトレイ20の移動方向前側が開放されて開口部18が形成されている。また、底板15の前端にペッグトレイ20のペッグ21の通過を許容する図示しない切り欠き部が形成されている。ボビンホルダ12のフレーム13、14の前端上部内面には、上記切り欠き部と対応する位置に配置された最前部の空ボビンBの上端を支承しその移動を規制する規制部材19が配設されている。規制部材19は板ばねにより形成され、ボビンホルダ12の内側、即ち前方より後方に向かう方向の付勢力を有している。
【0019】
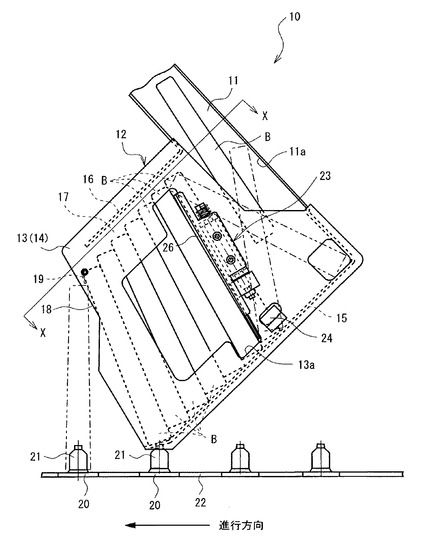
ボビンシュート11を介して補給された空ボビンBは、ボビンホルダ12内にてボビン通路17を前方に移動するが、開口部18に設けられた規制部材19により前方への移動が規制されボビンホルダ12内に複数本の空ボビンBが貯留される。図1に示されるように、ボビンホルダ12内には7本の空ボビンBが貯留されている。また、図2に示されるように、ボビンホルダ12内に貯留されている空ボビンBは、一列で収容されており、フレーム13、14間に形成されるボビン通路17の左右方向の間隔は、空ボビンBの外径寸法よりやや大きく設定され、ボビン通路17内を空ボビンBが移動可能となっている。
【0020】
ボビンホルダ12の開口部18よりも上流側の、ボビンホルダ12内に貯留されている空ボビンBの最前部より6本目と7本目の間に相当する位置には、空ボビンBの側面を支持する規制部26を備えたボビン姿勢制御手段としてのボビン姿勢制御部材23が設けられている。尚、ボビン姿勢制御部材23については後で詳述する。また、ボビンホルダ12の後寄りにはボビン検知センサ24が設けられている。ボビン検知センサ24は、ボビンホルダ12内に満本数(この場合には7本)配置された時に、最後部の空ボビンBを検知可能な位置に取り付けられている。
【0021】
ペッグトレイ20は所定間隔で配置され、図示しないエアシリンダの往復動により1ストローク分ずつ間欠的に移動可能となっている。この実施形態では、エアシリンダの1ストロークでペッグトレイ20を4個送る設定となっている。
ペッグトレイ20のペッグ21は、ボビンホルダ12内に貯留されている最前部の空ボビンBと係合し、ペッグトレイ20の前方への移動に伴い空ボビンBがペッグ21に挿着されると共に、規制部材19の付勢力に抗して前方に進みボビンホルダ12より排出される。
【0022】
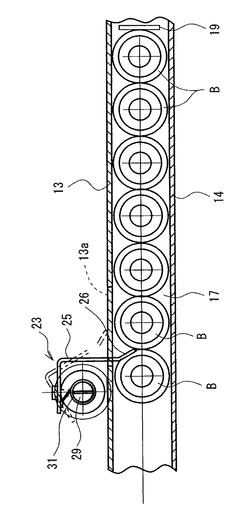
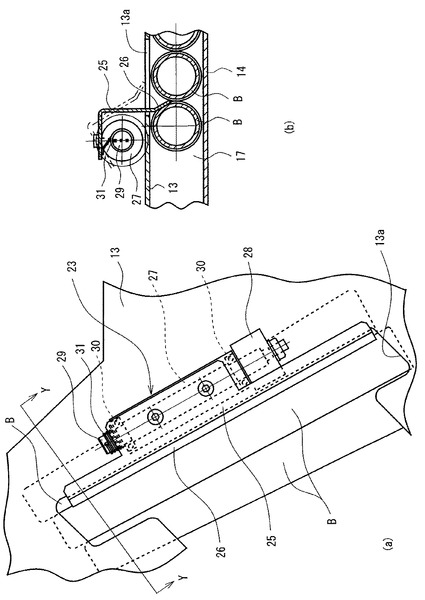
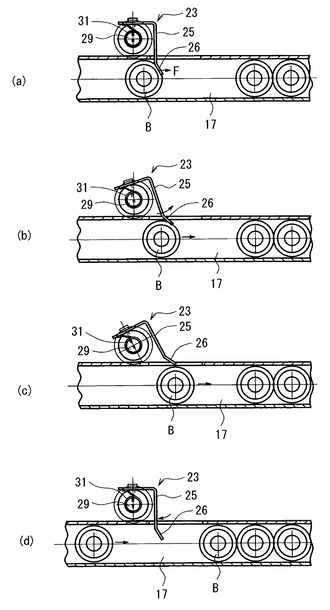
図3(a)、(b)に示されるように、ボビン姿勢制御部材23は、L字型に屈曲形成された長尺状のブラケット25と、ブラケット25の一端に固定された円筒状の軸受ホルダ27と、フレーム13に固定部材28を介して取り付けられた支持軸29とで構成されており、軸受ホルダ27に装着された2個の軸受30を介してブラケット25と支持軸29とを結合させることにより、ブラケット25は支持軸29の周りを回転可能に支持されている。そして、ブラケット25の他端には、先端が折り曲げられて平板状の規制部26が形成されており、規制部26はボビン通路17に突出可能となっている。平板状部材で構成される規制部26は、ボビン検知センサ24が設けられる7本目のボビン貯留位置の直前である6本目のボビン貯留位置にある空ボビンBの側面に沿うように配置される。なお、規制部26の長さは、底板15及び天板16との間に空ボビンBが抜け出るような隙間が生じないだけの長さに設定されている。
【0023】
ボビン姿勢制御部材23は、支持軸29の軸線方向がボビンホルダ12内に貯留される空ボビンBの軸線方向に略一致するように配置されており、またブラケット25の端部に設けられた規制部26をフレーム13に設けられた開口窓13aを介してボビン通路17内に突出可能に配置されている。また、上下方向に延設された長尺状の規制部26は、支持軸29の軸線方向と略平行となるように配置されている。
【0024】
支持軸29の端部にはつるまきばね31が装着され、つるまきばね31は一端が支持軸29に係止され、他端がブラケット25と係合するように取り付けられており、つるまきばね31の付勢力によりブラケット25は規制部26をボビン通路17内に突出させる方向の力を受けている。即ち、図3(b)に示すように、つるまきばね31の付勢力によりブラケット25は支持軸29を中心として右回りに回動する方向に付勢され、このとき規制部26はボビン通路17内に突出された位置にある。
【0025】
補給された空ボビンBが規制部26と当接することにより、空ボビンBの姿勢が整えられるが、規制部26に姿勢が整えられた空ボビンBの自重の大部分がかかることにより、規制部26は支持軸29の周りを回動しボビン通路17外に退出される。つるまきばね31の付勢力の強さは、規制部26に空ボビンBの自重の大部分がかかった時に、規制部26が支持軸29の周りを回動しボビン通路外に退出されるように、予め設定されているものとする。
【0026】
尚、図3(b)に実線で示されるのは、ボビン姿勢制御部材23の規制部26がボビンホルダ12のボビン通路17内に突出された閉位置の状態を示し、仮想線で示されるのは、ボビン姿勢制御部材23の規制部26がボビン通路17内から退避された開位置の状態を示している。
ボビンホルダ12内に所定本数(この実施形態では7本)の空ボビンBが貯留されている状態においては、規制部26は最前部より6本目と7本目の間に相当する位置に設けられており、7本目の空ボビンBの前方の側面と当接する位置に配置されている。そして、ボビン検知センサ24は、最後部の空ボビンBを検知可能な位置に取り付けられているので、7本目の空ボビンBが検知されない時には、ボビンシュート11を介して空ボビンBが補給される。なお、ボビンホルダ12内に貯留される空ボビンBの所定本数は、開口部18における空ボビンBのペッグ21に対する傾斜角度やボビンシュート11の傾斜角度等に応じて決定される。
【0027】
また、ボビン姿勢制御部材23の規制部26は、ボビンホルダ12内の空ボビンBの落下位置より下流側における、ボビンシュート11の側壁11aと規制部26との間のスペースにおいて落下した空ボビンBの倒れが発生しない位置に設けられている。図1に仮想線で示すように、ボビンシュート11から補給された空ボビンBはボビン通路17に落下後、前後方向に傾くことがあるが、ボビン通路17に突出配置されているボビン姿勢制御部材23の規制部26と、ボビンシュート11の側壁11aとにより空ボビンBの前後方向への倒れ込みが規制されている。本実施形態においては、ボビン通路17内に貯留される空ボビンBの6本目(所定本数の直前の本数)と7本目(所定本数)の間において、6本目の空ボビンBの側面に沿うように規制部26が配置されている。従って、新たにボビンシュート11から供給される空ボビンBは、空ボビンBが1本だけペッグトレイ20に移行した後に引き続き空ボビンBがボビンシュート11から供給される場合の、6本目の空ボビンBの側面とボビンシュート11の側壁11aとの間における規制状態と同様な状態で傾きが規制される。
【0028】
以上の構成を持つ紡機におけるボビン供給装置10についてその作用を説明する。
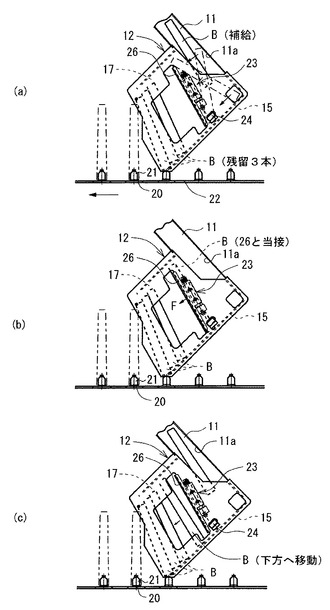
例えば、図4(a)に示されるように、ペッグトレイ20が4個ずつ間欠的に送られる設定にある時に、ボビンホルダ12内に貯留されている空ボビンBがペッグトレイ20の前方への移動に伴いボビンホルダ12内より4本排出され、ボビンホルダ12内の空ボビンBの残留本数が3本になったとする。
【0029】
このときには、ボビン検知センサ24が空ボビンBを検知しないので、上方の空ボビン収納部より空ボビンBが1本ずつ補給され、補給された空ボビンBはボビンシュート11を介して小径部を上方に向け大径部を下方に向けてボビンホルダ12内に落下する。
落下した空ボビンBは、前方に傾斜した底板15に対してほぼ直立した状態を維持したままボビン通路17を前方に移動するもの以外に、空ボビンBの大径部を後方に残したまま小径部が前方に傾いたものと、大径部を前方に向け小径部が後方に傾いたものとが発生する。
【0030】
しかし、ボビンホルダ12内の空ボビンBの落下位置より下流側であって、且つボビンホルダ12内に貯留されている3本の空ボビンBより上流側のボビン通路17には、ボビン姿勢制御部材23の規制部26が突出配置されているので、ボビン姿勢制御部材23の規制部26とボビンシュート11の側壁11aとにより空ボビンBの前後方向への倒れ込みが規制されている。従って、図4(a)に仮想線で示すように、空ボビンBの前後方向への傾きは、ボビン姿勢制御部材23がなく、ボビンホルダ12内に残留している3本の空ボビンBの最後部まで、新たに供給された空ボビンBが直接移動する場合に比べて小さく規制される。この傾きの規制は、規制状態の空ボビンBに対して、空ボビンBの自重が空ボビンBを直立状態に復帰させる方向に作用する範囲でなされる。この規制範囲は、具体的には、空ボビンBの重心位置や外形形状、底板15の傾斜角度等により定まる。
【0031】
この前後方向に傾いた空ボビンBには、重力の作用によりその傾きを修復するような力が作用する。即ち、大径部を後方に残したまま小径部が前方に傾いた空ボビンBについては、矢印で示すように傾斜した底板15に沿って大径部を前方に移動させる方向の力が作用し、空ボビンBはボビン姿勢制御部材23の規制部26に沿うように姿勢が変更される。また、大径部を前方に向け小径部が後方に傾いた空ボビンBについては、矢印で示すように小径部を前方に移動させる方向の力が作用し、空ボビンBはボビン姿勢制御部材23の規制部26に沿うように姿勢が変更される。
【0032】
このように、落下した空ボビンBは、ボビン姿勢制御部材23の規制部26と当接することにより姿勢が整えられる。図4(b)は、このときの状況を示したものであり、補給された空ボビンBの前方の側面は、上下方向に延設された長尺状の規制部26に当接した状態にある。
ところで、傾斜配置された規制部26に空ボビンBの側面全体が当接することにより、空ボビンBの自重の大部分が規制部26にかかり、規制部26には図4(b)に矢印で示す方向の力Fが作用する。
【0033】
この時のボビン姿勢制御部材23の規制部26の作動を図5を用いて説明する。
図5(a)、(b)に示されるように、規制部26に作用するこの力Fにより、ブラケット25は支持軸29を中心としてつるまきばね31の付勢力に抗して左回りに回動される。そして、図5(c)に示されるように、規制部26はボビン通路17より退避された開位置に至るので、空ボビンBは傾斜したボビン通路17を前方に向けて移動する。
そして、図5(d)に示されるように、空ボビンBが通過した後は、つるまきばね31の付勢力によりブラケット25は支持軸29を中心として右回りに回動され、規制部26はボビン通路17に突出した閉位置に復帰する。
【0034】
図4(c)に示されるように、規制部26が支持軸29を中心としてボビン通路17内から退避された開位置に回動されることにより、空ボビンBは傾斜したボビン通路17を直立姿勢を維持したままの状態で前方に向けて移動する。そして、ボビンホルダ12内に貯留されている3本の空ボビンBに続いて貯留される。
ボビンシュート11を介して次の空ボビンBが補給され上記と同様の工程を経てボビンホルダ12内に貯留される。ボビンホルダ12内に貯留される空ボビンBの本数が所定本数(この場合には7本)に達するまで上記動作は繰り返し行われる。
【0035】
ボビンホルダ12内に貯留される空ボビンBの本数が所定本数に達すると、即ち、ボビン検知センサ24が空ボビンBを検知すると、再びペッグトレイ20が4個連続的に前方に移動される。これに伴い、ボビンホルダ12内に貯留されている空ボビンBが順次ペッグトレイ20のペッグ21と係合し、1本ずつ前方に排出される。
【0036】
この実施形態に係る紡機におけるボビン供給装置によれば以下の効果を奏する。
(1)ボビンシュート11の側壁11aとの間で空ボビンBの傾きを直立状態に復帰可能な範囲で規制する規制部26を備えたボビン姿勢制御部材23が設けられ、ボビン姿勢制御部材23の規制部26は、ボビンホルダ12のボビン通路17内に突出させる閉位置と、ボビン通路17内から退避させる開位置とに移動可能とされている。従って、ボビン姿勢制御部材23の規制部26をボビンホルダ12のボビン通路17内に突出させた閉位置とすることにより、ボビンシュート11を介して補給された空ボビンBはボビン通路17を移動し、空ボビンBの側面が規制部26と当接し空ボビンBの姿勢が整えられる。そして、ボビン姿勢制御部材23の規制部26をボビン通路17内から退避させる開位置に移動させることにより、姿勢が整えられた空ボビンBはボビン通路17内を姿勢を維持したまま下流側に移動し貯留される。よって、複数本(この実施形態では4本)ずつ空ボビンBが移動されることにより、ボビンホルダ12内に貯留されている空ボビンBの残留本数が少なくなり、ボビンホルダ12内に大きな空きスペースが形成されても、空ボビンBの前後方向への倒れ込みは発生することはなく、ボビンホルダ12内における空ボビンBの詰まりを防止できると共に、単位時間当りの搬送本数を増加させることが可能となり、ペッグトレイ20によるボビンの高速搬送が可能となる。
(2)ボビン姿勢制御部材23は、規制部26に連設されたブラケット25と、該ブラケット25を回転可能に支持する支持軸29とを備え、支持軸29とブラケット25の間には規制部26を閉位置に回動させる方向に付勢された付勢手段(つるまきばね31)が装着された簡単な構造なので、装置の簡略化を図れ設置スペースを削減可能である。
(3)支持軸29とブラケット25の間に介装されたつるまきばね31の付勢力によりブラケット25は、ボビン通路17内に規制部26を突出させた閉位置に配置されている。この状態において、ボビンシュート11を介して空ボビンBが補給されると、補給された空ボビンBの側面が規制部26と当接することにより、空ボビンBの自重が規制部26に作用し、ブラケット25は支持軸29を中心につるまきばね31の付勢力とは反対方向に回動され、規制部26はボビン通路17内から退避された開位置に移動される。よって、ボビン姿勢制御部材23の規制部26を開閉作動させるために、つるまきばね31を使用しているので、特別の駆動手段を用いる必要が無く、装置を簡略化でき取り付けを簡単に行える。また、つるまきばね31の付勢力の調整が容易であり、支持軸29に対して最小限のスペースで取り付けることができる。
(4)ボビン姿勢制御部材23の規制部26は、ボビンホルダ12のボビン通路17内に貯留される空ボビンBの側面に沿うように延びる平板状部材で構成される。従って、ボビン姿勢制御部材23の規制部26が開位置を取ることによりボビン通路17を前進する空ボビンBがより安定した姿勢で貯留される。
【0037】
(第2の実施形態)
次に、本発明の第2の実施形態を図6に基づいて説明する。
この実施形態では、第1の実施形態における付勢手段としてのつるまきばね31をバランスウェイトに変更したものであり、その他の構成は共通である。
従って、ここでは、説明の便宜上、先の説明で用いた符号を一部共通して用い、共通する構成についてはその説明を省略し、変更した個所のみ説明を行う。
【0038】
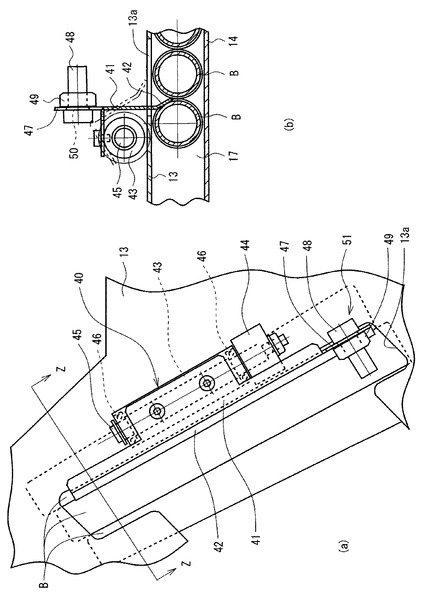
図6に示されるように、ボビン姿勢制御部材40は、L字型に屈曲形成された長尺状のブラケット41と、ブラケット41の一端に固定された円筒状の軸受ホルダ43と、フレーム13に固定部材44を介して取り付けられた支持軸45とで構成されており、軸受ホルダ43に装着された2個の軸受46を介してブラケット41と支持軸45とを結合させることにより、ブラケット41は支持軸45の周りを回転可能に支持されている。そして、ブラケット41の他端には、先端が折り曲げられて平板状の規制部42が形成されており、規制部42はボビン通路17に突出可能となっている。
【0039】
ブラケット41の下端部には規制部42と反対方向に延長形成された延設部47が設けられており、延設部47には長孔状の挿通孔50が形成されこの挿通孔50にボルト48が挿通され、ナット49で締付け固定されている。尚、このボルト48とナット49でバランスウェイト51が構成されている。このバランスウェイト51の付勢力によりブラケット41は規制部42をボビン通路17内に突出させる方向の力を受けている。即ち、図6(b)に示すように、バランスウェイト51の付勢力によりブラケット41は支持軸45を中心として右回りに回動する方向に付勢され、このとき規制部42はボビン通路17内に突出された位置にある。
【0040】
補給された空ボビンBが規制部42と当接することにより、空ボビンBの姿勢が整えられるが、規制部42に空ボビンBの自重がかかることにより、規制部42は支持軸45の周りを回動しボビン通路17外に退出される。バランスウェイト51の付勢力の強さは、規制部42に空ボビンBの側面全体が当接し、空ボビンBの自重の大部分がかかった時に、規制部42が支持軸45の周りを回動しボビン通路17外に退避されるように、予め調整されているものとする。この調整は、挿通孔50の長孔に沿ってバランスウェイト51の位置調整を行うことによりなされる。
【0041】
尚、図6(b)に実線で示されるのは、ボビン姿勢制御部材40の規制部42がボビンホルダ12のボビン通路17内に突出された閉位置の状態を示し、仮想線で示されるのは、ボビン姿勢制御部材40の規制部42がボビン通路17内から退避された開位置の状態を示している。
この実施形態におけるボビン供給装置の作用については、第1の実施形態におけるつるまきばね31をバランスウェイト51に置き換えて考えれば良く同等なので説明を省略する。
【0042】
この実施形態に係る紡機におけるボビン供給装置によれば以下の効果を奏する。
尚、第1の実施形態における(1)、(4)の効果は同じであり、それ以外の効果を記載する。
(1)ボビン姿勢制御部材40は、規制部42に連設されたブラケット41と、該ブラケット41を回転可能に支持する支持軸45とを備え、ブラケット41の延設部47には規制部42を閉位置に回動させる方向にブラケット41を付勢する付勢手段(バランスウェイト51)が装着された簡単な構造なので、装置の簡略化を図れ設置スペースを削減可能である。
(2)ブラケット41の延設部47に設けられたバランスウェイト51の付勢力によりブラケット41は、ボビン通路17内に規制部42を突出させた閉位置に配置されている。この状態において、ボビンシュート11を介して空ボビンBが補給されると、補給された空ボビンBの側面が規制部42と当接することにより、空ボビンBの自重が規制部42に作用し、ブラケット41は支持軸45を中心にバランスウェイト51の付勢力とは反対方向に回動され、規制部42はボビン通路17内から退避された開位置に移動される。よって、ボビン姿勢制御部材40の規制部42を開閉作動させるために、バランスウェイト51を使用しているので、特別の駆動手段を用いる必要が無く、装置を簡略化でき取り付けを簡単に行える。また、バランスウェイト51を使用していることにより風綿等の堆積や、繰返し動作に対して優れた耐久性を有する。
(3)バランスウェイト51はボルト48とナット49で構成されており、長孔状の挿通孔50にボルト48が挿通され、ナット49で締付け固定されたものである。よって、バランスウェイト51の付勢力の強さは、挿通孔50の長孔に沿ってバランスウェイト51の位置調整を行うことによりなされるので、調整を簡単に行うことができる。
【0043】
なお、本発明は、上記した実施形態に限定されるものではなく発明の趣旨の範囲内で種々の変更が可能であり、例えば、次のように変更してもよい。
○ 第1、第2の実施形態では、フレームに固定された支持軸の周りをブラケットが回動可能に支持されているとして説明したが、ブラケット側に支持軸を設け、フレームに支持固定された軸受を介して回転可能としても良い。
○ 第1、第2の実施形態では、ボビン姿勢制御部材の規制部を長尺状の平板で形成するとして説明したが、空ボビンと当接する面は凹凸状に形成しても良く、また長手方向に鋸歯状としても良い。
○ 第2の実施形態ではバランスウェイトをボルトとナットで構成するとして説明したが、ウェイト部材を別途形成し、これを取り付けても良い。
○ 第1、第2の実施形態では、ブラケットを支持軸の周りに回転可能に取り付けるとして説明したが、支持軸に代えてヒンジ(蝶番)を用いヒンジを介して回転可能としても良い。
○ 第1、第2の実施形態では、ボビン姿勢制御部材の規制部の開閉作動を空ボビンの自重と付勢部材の付勢力のバランスを利用した制御として説明したが、ボビン姿勢制御部材の規制部の開閉作動をエアシリンダ、電磁バルブなどを用いて強制的に行わせても良い。例えば、ブラケットとエアシリンダを連結させ規制部への空ボビンの当接状態を検知する検知センサを別途設け、検知センサからの検知信号に基づきエアシリンダを駆動させることによりボビン姿勢制御部材の規制部の開閉作動を行わせるようにしても良い。
○ 各実施形態では、ボビン姿勢制御部材の規制部が支持軸を中心に回動することにより開閉作動が行われるとして説明したが、ボビン姿勢制御部材の規制部をボビン通路に対して直角方向にスライド可能に取り付けても良い。例えば、平板状の規制部をフレームに設けられたスリット孔にスライド可能に取り付け、駆動手段としてエアシリンダ、電磁バルブなどを用いても良い。
○ ゴム板などの平板状のフレキシブル部材をボビン通路内に通路を閉鎖するように配置し、補給された空ボビンがフレキシブル部材に当接することにより、空ボビンの自重でフレキシブル部材が変形しボビン通路が開状態となるようにしても良い。
○ 本発明は、精紡機のみならず粗紡機、撚糸機などに適用可能である。
【図面の簡単な説明】
【0044】
【図1】第1の実施形態に係るボビン供給装置の概略構成を示す正面図である。
【図2】図1のX−X線断面図である。
【図3】第1の実施形態に係るボビン姿勢制御部材の要部拡大図である。(a)要部拡大正面図である。(b)(a)のY−Y線断面図である。
【図4】第1の実施形態に係るボビン供給装置の作用説明用の模式図である。(a)補給された空ボビンの落下状態を示す。(b)ボビン姿勢制御部材に当接状態を示す。(c)ボビン貯留部への移動状態を示す。
【図5】第1の実施形態に係るボビン姿勢制御部材の作用説明用の模式図である。(a)空ボビンが規制部に当接した状態を示す。(b)空ボビンの自重で規制部が回動した状態を示す。(c)規制部がボビン通路より退避した状態を示す。(d)空ボビンが通過し規制部がボビン通路に復帰した状態を示す。
【図6】第2の実施形態に係るボビン姿勢制御部材の要部拡大図である。(a)要部拡大正面図である。(b)(a)のZ−Z線断面図である。
【図7】従来技術の説明用の模式図である。ペッグトレイ2個送りの設定の場合。
【図8】従来技術の説明用の模式図である。ペッグトレイ4個送りの設定の場合。
【符号の説明】
【0045】
10 ボビン供給装置
11 ボビンシュート
11a 側壁
12 ボビンホルダ
17 ボビン通路
18 開口部
20 ペッグトレイ
23 ボビン姿勢制御部材
26 規制部
31 ばね(つるまきばね)
51 バランスウェイト
B 空ボビン
【技術分野】
【0001】
本発明は、ペッグトレイ上のペッグに空ボビンを供給する紡機におけるボビン供給装置に関するものである。
【背景技術】
【0002】
特許文献1で開示された従来技術では、空ボビン供給装置18が開示されており、空ボビン供給装置18は、空ボビン収容箱30、シュータ31及び空ボビン供給部32を備えている。空ボビン収容箱30の底部にはドラム34が回転可能に配設され、ドラム34の間欠回転により空ボビン収容箱30内に収容されている空ボビンEをシュータ31へと1本ずつ落下させる。
空ボビン供給部32は、前下がりに傾斜して複数の空ボビンEを載置可能な底壁32aを備え、その下方を移動するペッグトレイ2の移動方向前側が開放されており、底壁32aの先端にペッグトレイ2のペッグ2bの先端が通過可能な切り欠き部が形成されている。ペッグトレイ2はベルト13とガイド部材14に挟圧された状態で移動されている。
【0003】
シュータ31より空ボビン供給部32へ送り込まれた空ボビンEは、底壁32a上に所定本数貯留される。ペッグトレイ2の移動に伴い、ペッグ2bは空ボビン供給部32内の前端に位置する空ボビンEと係合し、ペッグ2bの移動とともに空ボビンEが空ボビン供給部32から排出される。先頭の空ボビンEが空ボビン供給部32から排出されると、後続の空ボビンEが前側に移動し、次のペッグ2bと係合可能な状態に配置される。この動作は繰り返し行われるが、空ボビン供給部32内の空ボビンEの数が所定本数以下になった時には、ドラム34が回動されて空ボビン収容箱30からシュータ31を介して空ボビンEが補給される。
【特許文献1】特開平9−111553(第6〜8頁、図4〜図5)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1で開示された従来技術では、システムの高速化のために、単位時間当りのペッグトレイ2の移送個数を増やすと、空ボビン供給部32よりペッグトレイ2へ移行する空ボビンEの単位時間当りの本数が増加し、空ボビン供給部32内に貯留されている空ボビンEの本数が一時的に少なくなる。一方、シュータ31内の空ボビンEの詰まりを防止するために、空ボビン収容箱30からシュータ31を介して補給される空ボビンEの単位時間当りの本数はあまり増加させられないため、空ボビンEの補給が追いつかず空ボビン供給部32内には大きな空きスペースが形成される。この状態で空ボビン収容箱30からシュータ31を介して空ボビンEが補給されると、補給された空ボビンEは、落下時の衝撃等により大きな空きスペースの内で倒れてしまい、空ボビン供給部32内でボビン詰まりが発生する問題がある。
【0005】
図7及び図8は、この時の状態を模式的に示したものであり、例えば、図7はペッグトレイを間欠的に2個ずつ送る場合を示し、図8はペッグトレイを間欠的に4個ずつ送る場合を示している。なお、この図においては、ペッグトレイ搬送用エアシリンダにより、ペッグトレイが間欠的に移動されることを想定しており、通常、シュータ62からのボビン供給速度よりもペッグトレイ搬送用エアシリンダの送り速度の方が速いため、シュータ62からの空ボビン供給よりも先に1ストローク分の空ボビンEの移行が完了する。
ボビン供給部61内に貯留される空ボビンEの所定本数を7本とすれば、図7に示す2個送りの場合には、2本の空ボビンEがボビン供給部61よりペッグトレイ63へ移行しても残留分が5本あり、ボビン供給部61内にはそれほど大きな空きスペースは形成されない。この状態でシュータ62を介して空ボビンEが補給されると、補給された空ボビンEは、仮想線で示すように底壁61aに対してほぼ直立状態で落下しそのまま前方に移動するもの以外に、落下時の衝撃等により、空ボビンEの大径部を後方に残したまま小径部が前方に傾いたものと、大径部を前方に向けて小径部が後方に傾いたものとが発生する。しかし、前後方向に傾いた空ボビンEは、既に貯留されている最後部の空ボビンEの後方側側面とシュータ62の側壁62aとの間で傾きが規制され、矢印で示すように重力の作用により、空ボビンEには傾きを修復するような力が作用し、姿勢が整えられた状態でボビン供給部61内に貯留される。従って、ボビン供給部61内でボビン詰まりが発生することは少ない。
【0006】
しかし、図8に示す4個送りの場合には、4本の空ボビンEがボビン供給部61よりペッグトレイ63へ移行すると残留分は3本となり、ボビン供給部61内には2個送りの場合に比べてかなり大きな空きスペースが形成される。前述の2個送りの場合と同様に、この状態でシュータ62を介して空ボビンEが補給されると、仮想線で示すように底壁61aに対してほぼ直立状態で落下しそのまま前方に移動するもの以外に、空ボビンEの大径部を後方に残したまま小径部が前方に傾いたものと、大径部を前方に向けて小径部が後方に傾いたものとが発生する。しかし、この場合には、空きスペースがかなり大きいので、前後方向に傾いた空ボビンEの傾きは図7における傾きと比較してかなり大きく、矢印で示すようにボビン供給部61内で、直立状態に復帰することなく前後に倒れてしまう。そのため、ボビン供給部61内でボビン詰まりが発生してしまう。
このように、システムの高速化のために単位時間当りのペッグトレイ63の移送個数を増やすとボビン供給部61内で補給された空ボビンEの倒れが発生し、ボビン詰まりが発生してしまう問題がある。
【0007】
本発明の目的は、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送を可能とする紡機におけるボビン供給装置の提供にある。
【課題を解決するための手段】
【0008】
上記課題を達成するため、請求項1記載の発明は、補給された空ボビンを案内するボビンシュートと、該ボビンシュートと連結され、前記空ボビンを貯留する下方に傾斜したボビン通路及びベッグトレイに前記空ボビンを供給する開口部を有するボビンホルダとが設けられた紡機におけるボビン供給装置において、前記ボビンシュートの側壁との間で前記空ボビンの傾きを直立状態に復帰可能な範囲で規制する規制部を備えたボビン姿勢制御手段を設け、該ボビン姿勢制御手段の規制部を前記ボビンホルダのボビン通路内に突出させる閉位置と、前記ボビン通路内から退避させる開位置とに移動可能としたことを特徴とする。
【0009】
請求項1記載の発明によれば、ボビンシュートの側壁との間で空ボビンの傾きを直立状態に復帰可能な範囲で規制する規制部を備えたボビン姿勢制御手段が設けられ、ボビン姿勢制御手段の規制部は、ボビンホルダのボビン通路内に突出させる閉位置と、ボビン通路内から退避させる開位置とに移動可能とされている。従って、ボビン姿勢制御手段の規制部をボビンホルダのボビン通路内に突出させた閉位置とすることにより、ボビンシュートを介して補給された空ボビンが規制部と当接し、空ボビンの姿勢が自重により直立状態に整えられる。そして、ボビン姿勢制御手段の規制部をボビン通路内から退避させる開位置に移動させることにより、姿勢が整えられた空ボビンはボビン通路内を下流側にそのまま移動し貯留される。よって、システムの高速化のために単位時間当りのペッグトレイの移送個数を増やすことによりボビンホルダ内に大きな空きスペースが形成されても、ボビン姿勢制御手段の規制部により空ボビンの姿勢を整えることができるので、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送が可能となる。
【0010】
請求項2記載の発明は、請求項1記載の紡機におけるボビン供給装置において、前記ボビン姿勢制御手段は、前記規制部に連設されたブラケットと、該ブラケットを回転可能に支持する支持軸とを備え、前記ブラケットに前記規制部を前記閉位置に回動させる方向の付勢力を有する付勢手段を装着したことを特徴とする。
【0011】
請求項2記載の発明によれば、ボビン姿勢制御手段は、規制部に連設されたブラケットと、該ブラケットを回転可能に支持する支持軸とを備え、ブラケットには規制部を閉位置に回動させる方向に付勢された付勢手段が装着されている。従って、規制部に空ボビンが当接していない状態においては、付勢手段の付勢力により、ブラケットはボビン通路内に規制部を突出させた閉位置に配置されている。この状態において、ボビンシュートを介して空ボビンが補給されると、規制部に空ボビンが当接してその姿勢が整えられる。直立状態に姿勢が整えられた空ボビンの側面全体が規制部と当接することにより、空ボビンの自重の大部分が規制部に作用し、ブラケットは支持軸を中心に付勢手段の付勢力とは反対方向に回動される。このとき、付勢手段の付勢力を適宜設定することにより、空ボビンの姿勢が規制部により直立状態に整えられた後に、規制部をボビン通路内から退避された開位置に移動させることが可能となる。そして、空ボビンはボビン通路内を下流側にそのまま移動し貯留される。よって、ボビン姿勢制御手段を開閉作動させるために、付勢手段を使用しているので、特別の駆動手段を用いる必要が無く、装置を簡略化できる。
【0012】
請求項3記載の発明は、請求項2に記載の紡機におけるボビン供給装置において、前記付勢手段がばねであることを特徴とする。
請求項3記載の発明によれば、付勢手段がばねで構成されるので、付勢力の調整が容易であり、支持軸に対して最小限のスペースで取り付けることができる。
【0013】
請求項4記載の発明は、請求項2に記載の紡機におけるボビン供給装置において、前記付勢手段がバランスウェイトであることを特徴とする。
請求項4記載の発明によれば、付勢手段がバランスウェイトで構成されるので、風綿等の堆積や、繰返し開閉動作に対して優れた耐久性を有する。
【0014】
請求項5記載の発明は、請求項1〜4のいずれか一項記載の紡機におけるボビン供給装置において、ボビン姿勢制御手段の規制部は、ボビンホルダのボビン通路内に貯留される前記空ボビンの側面に沿うように延びる平板状部材で構成される。
請求項5記載の発明によれば、ボビン姿勢制御手段の規制部が開位置を取ることによりボビン通路を前進する空ボビンがより安定した姿勢で貯留される。
【発明の効果】
【0015】
この発明によれば、ボビンホルダ内にボビン姿勢制御手段を設け、ボビン通路を開閉可能に制御することにより、ボビンホルダ内における空ボビンの倒れ、詰まりを防止でき、ペッグトレイによるボビンの高速搬送が可能となる。
【発明を実施するための最良の形態】
【0016】
(第1の実施形態)
以下、本発明の第1の実施形態を図1〜図5に基づいて説明する。
図1に示されるように、ボビン供給装置10は、補給された空ボビンBを案内するボビンシュート11と、ボビンシュート11と連結され補給された空ボビンBを貯留するボビンホルダ12を備えている。ボビンシュート11の上方に配置された図示しない空ボビン収納部より空ボビンBが一本ずつ補給され、補給された空ボビンBはボビンシュート11内で空ボビンBの大径部が下側となるようにその姿勢が変更されてボビンホルダ12内に落下する。
【0017】
ボビンホルダ12は左右一対のフレーム13、14と、フレーム13、14間の下方の端部に前下がりに傾斜配置された底板15と、上方の端部に前下がりに傾斜配置された天板16とで構成されている。尚、図1において左方向を前方、右方向を後方とし、図1における紙面と直角方向(表面より裏面に向かう方向)を左右方向とする。フレーム13、14、底板15及び天板16とで囲まれて前下がりに傾斜したボビン通路17が形成されている。
【0018】
ボビンホルダ12の前端部には、その下方を移動するペッグトレイ20の移動方向前側が開放されて開口部18が形成されている。また、底板15の前端にペッグトレイ20のペッグ21の通過を許容する図示しない切り欠き部が形成されている。ボビンホルダ12のフレーム13、14の前端上部内面には、上記切り欠き部と対応する位置に配置された最前部の空ボビンBの上端を支承しその移動を規制する規制部材19が配設されている。規制部材19は板ばねにより形成され、ボビンホルダ12の内側、即ち前方より後方に向かう方向の付勢力を有している。
【0019】
ボビンシュート11を介して補給された空ボビンBは、ボビンホルダ12内にてボビン通路17を前方に移動するが、開口部18に設けられた規制部材19により前方への移動が規制されボビンホルダ12内に複数本の空ボビンBが貯留される。図1に示されるように、ボビンホルダ12内には7本の空ボビンBが貯留されている。また、図2に示されるように、ボビンホルダ12内に貯留されている空ボビンBは、一列で収容されており、フレーム13、14間に形成されるボビン通路17の左右方向の間隔は、空ボビンBの外径寸法よりやや大きく設定され、ボビン通路17内を空ボビンBが移動可能となっている。
【0020】
ボビンホルダ12の開口部18よりも上流側の、ボビンホルダ12内に貯留されている空ボビンBの最前部より6本目と7本目の間に相当する位置には、空ボビンBの側面を支持する規制部26を備えたボビン姿勢制御手段としてのボビン姿勢制御部材23が設けられている。尚、ボビン姿勢制御部材23については後で詳述する。また、ボビンホルダ12の後寄りにはボビン検知センサ24が設けられている。ボビン検知センサ24は、ボビンホルダ12内に満本数(この場合には7本)配置された時に、最後部の空ボビンBを検知可能な位置に取り付けられている。
【0021】
ペッグトレイ20は所定間隔で配置され、図示しないエアシリンダの往復動により1ストローク分ずつ間欠的に移動可能となっている。この実施形態では、エアシリンダの1ストロークでペッグトレイ20を4個送る設定となっている。
ペッグトレイ20のペッグ21は、ボビンホルダ12内に貯留されている最前部の空ボビンBと係合し、ペッグトレイ20の前方への移動に伴い空ボビンBがペッグ21に挿着されると共に、規制部材19の付勢力に抗して前方に進みボビンホルダ12より排出される。
【0022】
図3(a)、(b)に示されるように、ボビン姿勢制御部材23は、L字型に屈曲形成された長尺状のブラケット25と、ブラケット25の一端に固定された円筒状の軸受ホルダ27と、フレーム13に固定部材28を介して取り付けられた支持軸29とで構成されており、軸受ホルダ27に装着された2個の軸受30を介してブラケット25と支持軸29とを結合させることにより、ブラケット25は支持軸29の周りを回転可能に支持されている。そして、ブラケット25の他端には、先端が折り曲げられて平板状の規制部26が形成されており、規制部26はボビン通路17に突出可能となっている。平板状部材で構成される規制部26は、ボビン検知センサ24が設けられる7本目のボビン貯留位置の直前である6本目のボビン貯留位置にある空ボビンBの側面に沿うように配置される。なお、規制部26の長さは、底板15及び天板16との間に空ボビンBが抜け出るような隙間が生じないだけの長さに設定されている。
【0023】
ボビン姿勢制御部材23は、支持軸29の軸線方向がボビンホルダ12内に貯留される空ボビンBの軸線方向に略一致するように配置されており、またブラケット25の端部に設けられた規制部26をフレーム13に設けられた開口窓13aを介してボビン通路17内に突出可能に配置されている。また、上下方向に延設された長尺状の規制部26は、支持軸29の軸線方向と略平行となるように配置されている。
【0024】
支持軸29の端部にはつるまきばね31が装着され、つるまきばね31は一端が支持軸29に係止され、他端がブラケット25と係合するように取り付けられており、つるまきばね31の付勢力によりブラケット25は規制部26をボビン通路17内に突出させる方向の力を受けている。即ち、図3(b)に示すように、つるまきばね31の付勢力によりブラケット25は支持軸29を中心として右回りに回動する方向に付勢され、このとき規制部26はボビン通路17内に突出された位置にある。
【0025】
補給された空ボビンBが規制部26と当接することにより、空ボビンBの姿勢が整えられるが、規制部26に姿勢が整えられた空ボビンBの自重の大部分がかかることにより、規制部26は支持軸29の周りを回動しボビン通路17外に退出される。つるまきばね31の付勢力の強さは、規制部26に空ボビンBの自重の大部分がかかった時に、規制部26が支持軸29の周りを回動しボビン通路外に退出されるように、予め設定されているものとする。
【0026】
尚、図3(b)に実線で示されるのは、ボビン姿勢制御部材23の規制部26がボビンホルダ12のボビン通路17内に突出された閉位置の状態を示し、仮想線で示されるのは、ボビン姿勢制御部材23の規制部26がボビン通路17内から退避された開位置の状態を示している。
ボビンホルダ12内に所定本数(この実施形態では7本)の空ボビンBが貯留されている状態においては、規制部26は最前部より6本目と7本目の間に相当する位置に設けられており、7本目の空ボビンBの前方の側面と当接する位置に配置されている。そして、ボビン検知センサ24は、最後部の空ボビンBを検知可能な位置に取り付けられているので、7本目の空ボビンBが検知されない時には、ボビンシュート11を介して空ボビンBが補給される。なお、ボビンホルダ12内に貯留される空ボビンBの所定本数は、開口部18における空ボビンBのペッグ21に対する傾斜角度やボビンシュート11の傾斜角度等に応じて決定される。
【0027】
また、ボビン姿勢制御部材23の規制部26は、ボビンホルダ12内の空ボビンBの落下位置より下流側における、ボビンシュート11の側壁11aと規制部26との間のスペースにおいて落下した空ボビンBの倒れが発生しない位置に設けられている。図1に仮想線で示すように、ボビンシュート11から補給された空ボビンBはボビン通路17に落下後、前後方向に傾くことがあるが、ボビン通路17に突出配置されているボビン姿勢制御部材23の規制部26と、ボビンシュート11の側壁11aとにより空ボビンBの前後方向への倒れ込みが規制されている。本実施形態においては、ボビン通路17内に貯留される空ボビンBの6本目(所定本数の直前の本数)と7本目(所定本数)の間において、6本目の空ボビンBの側面に沿うように規制部26が配置されている。従って、新たにボビンシュート11から供給される空ボビンBは、空ボビンBが1本だけペッグトレイ20に移行した後に引き続き空ボビンBがボビンシュート11から供給される場合の、6本目の空ボビンBの側面とボビンシュート11の側壁11aとの間における規制状態と同様な状態で傾きが規制される。
【0028】
以上の構成を持つ紡機におけるボビン供給装置10についてその作用を説明する。
例えば、図4(a)に示されるように、ペッグトレイ20が4個ずつ間欠的に送られる設定にある時に、ボビンホルダ12内に貯留されている空ボビンBがペッグトレイ20の前方への移動に伴いボビンホルダ12内より4本排出され、ボビンホルダ12内の空ボビンBの残留本数が3本になったとする。
【0029】
このときには、ボビン検知センサ24が空ボビンBを検知しないので、上方の空ボビン収納部より空ボビンBが1本ずつ補給され、補給された空ボビンBはボビンシュート11を介して小径部を上方に向け大径部を下方に向けてボビンホルダ12内に落下する。
落下した空ボビンBは、前方に傾斜した底板15に対してほぼ直立した状態を維持したままボビン通路17を前方に移動するもの以外に、空ボビンBの大径部を後方に残したまま小径部が前方に傾いたものと、大径部を前方に向け小径部が後方に傾いたものとが発生する。
【0030】
しかし、ボビンホルダ12内の空ボビンBの落下位置より下流側であって、且つボビンホルダ12内に貯留されている3本の空ボビンBより上流側のボビン通路17には、ボビン姿勢制御部材23の規制部26が突出配置されているので、ボビン姿勢制御部材23の規制部26とボビンシュート11の側壁11aとにより空ボビンBの前後方向への倒れ込みが規制されている。従って、図4(a)に仮想線で示すように、空ボビンBの前後方向への傾きは、ボビン姿勢制御部材23がなく、ボビンホルダ12内に残留している3本の空ボビンBの最後部まで、新たに供給された空ボビンBが直接移動する場合に比べて小さく規制される。この傾きの規制は、規制状態の空ボビンBに対して、空ボビンBの自重が空ボビンBを直立状態に復帰させる方向に作用する範囲でなされる。この規制範囲は、具体的には、空ボビンBの重心位置や外形形状、底板15の傾斜角度等により定まる。
【0031】
この前後方向に傾いた空ボビンBには、重力の作用によりその傾きを修復するような力が作用する。即ち、大径部を後方に残したまま小径部が前方に傾いた空ボビンBについては、矢印で示すように傾斜した底板15に沿って大径部を前方に移動させる方向の力が作用し、空ボビンBはボビン姿勢制御部材23の規制部26に沿うように姿勢が変更される。また、大径部を前方に向け小径部が後方に傾いた空ボビンBについては、矢印で示すように小径部を前方に移動させる方向の力が作用し、空ボビンBはボビン姿勢制御部材23の規制部26に沿うように姿勢が変更される。
【0032】
このように、落下した空ボビンBは、ボビン姿勢制御部材23の規制部26と当接することにより姿勢が整えられる。図4(b)は、このときの状況を示したものであり、補給された空ボビンBの前方の側面は、上下方向に延設された長尺状の規制部26に当接した状態にある。
ところで、傾斜配置された規制部26に空ボビンBの側面全体が当接することにより、空ボビンBの自重の大部分が規制部26にかかり、規制部26には図4(b)に矢印で示す方向の力Fが作用する。
【0033】
この時のボビン姿勢制御部材23の規制部26の作動を図5を用いて説明する。
図5(a)、(b)に示されるように、規制部26に作用するこの力Fにより、ブラケット25は支持軸29を中心としてつるまきばね31の付勢力に抗して左回りに回動される。そして、図5(c)に示されるように、規制部26はボビン通路17より退避された開位置に至るので、空ボビンBは傾斜したボビン通路17を前方に向けて移動する。
そして、図5(d)に示されるように、空ボビンBが通過した後は、つるまきばね31の付勢力によりブラケット25は支持軸29を中心として右回りに回動され、規制部26はボビン通路17に突出した閉位置に復帰する。
【0034】
図4(c)に示されるように、規制部26が支持軸29を中心としてボビン通路17内から退避された開位置に回動されることにより、空ボビンBは傾斜したボビン通路17を直立姿勢を維持したままの状態で前方に向けて移動する。そして、ボビンホルダ12内に貯留されている3本の空ボビンBに続いて貯留される。
ボビンシュート11を介して次の空ボビンBが補給され上記と同様の工程を経てボビンホルダ12内に貯留される。ボビンホルダ12内に貯留される空ボビンBの本数が所定本数(この場合には7本)に達するまで上記動作は繰り返し行われる。
【0035】
ボビンホルダ12内に貯留される空ボビンBの本数が所定本数に達すると、即ち、ボビン検知センサ24が空ボビンBを検知すると、再びペッグトレイ20が4個連続的に前方に移動される。これに伴い、ボビンホルダ12内に貯留されている空ボビンBが順次ペッグトレイ20のペッグ21と係合し、1本ずつ前方に排出される。
【0036】
この実施形態に係る紡機におけるボビン供給装置によれば以下の効果を奏する。
(1)ボビンシュート11の側壁11aとの間で空ボビンBの傾きを直立状態に復帰可能な範囲で規制する規制部26を備えたボビン姿勢制御部材23が設けられ、ボビン姿勢制御部材23の規制部26は、ボビンホルダ12のボビン通路17内に突出させる閉位置と、ボビン通路17内から退避させる開位置とに移動可能とされている。従って、ボビン姿勢制御部材23の規制部26をボビンホルダ12のボビン通路17内に突出させた閉位置とすることにより、ボビンシュート11を介して補給された空ボビンBはボビン通路17を移動し、空ボビンBの側面が規制部26と当接し空ボビンBの姿勢が整えられる。そして、ボビン姿勢制御部材23の規制部26をボビン通路17内から退避させる開位置に移動させることにより、姿勢が整えられた空ボビンBはボビン通路17内を姿勢を維持したまま下流側に移動し貯留される。よって、複数本(この実施形態では4本)ずつ空ボビンBが移動されることにより、ボビンホルダ12内に貯留されている空ボビンBの残留本数が少なくなり、ボビンホルダ12内に大きな空きスペースが形成されても、空ボビンBの前後方向への倒れ込みは発生することはなく、ボビンホルダ12内における空ボビンBの詰まりを防止できると共に、単位時間当りの搬送本数を増加させることが可能となり、ペッグトレイ20によるボビンの高速搬送が可能となる。
(2)ボビン姿勢制御部材23は、規制部26に連設されたブラケット25と、該ブラケット25を回転可能に支持する支持軸29とを備え、支持軸29とブラケット25の間には規制部26を閉位置に回動させる方向に付勢された付勢手段(つるまきばね31)が装着された簡単な構造なので、装置の簡略化を図れ設置スペースを削減可能である。
(3)支持軸29とブラケット25の間に介装されたつるまきばね31の付勢力によりブラケット25は、ボビン通路17内に規制部26を突出させた閉位置に配置されている。この状態において、ボビンシュート11を介して空ボビンBが補給されると、補給された空ボビンBの側面が規制部26と当接することにより、空ボビンBの自重が規制部26に作用し、ブラケット25は支持軸29を中心につるまきばね31の付勢力とは反対方向に回動され、規制部26はボビン通路17内から退避された開位置に移動される。よって、ボビン姿勢制御部材23の規制部26を開閉作動させるために、つるまきばね31を使用しているので、特別の駆動手段を用いる必要が無く、装置を簡略化でき取り付けを簡単に行える。また、つるまきばね31の付勢力の調整が容易であり、支持軸29に対して最小限のスペースで取り付けることができる。
(4)ボビン姿勢制御部材23の規制部26は、ボビンホルダ12のボビン通路17内に貯留される空ボビンBの側面に沿うように延びる平板状部材で構成される。従って、ボビン姿勢制御部材23の規制部26が開位置を取ることによりボビン通路17を前進する空ボビンBがより安定した姿勢で貯留される。
【0037】
(第2の実施形態)
次に、本発明の第2の実施形態を図6に基づいて説明する。
この実施形態では、第1の実施形態における付勢手段としてのつるまきばね31をバランスウェイトに変更したものであり、その他の構成は共通である。
従って、ここでは、説明の便宜上、先の説明で用いた符号を一部共通して用い、共通する構成についてはその説明を省略し、変更した個所のみ説明を行う。
【0038】
図6に示されるように、ボビン姿勢制御部材40は、L字型に屈曲形成された長尺状のブラケット41と、ブラケット41の一端に固定された円筒状の軸受ホルダ43と、フレーム13に固定部材44を介して取り付けられた支持軸45とで構成されており、軸受ホルダ43に装着された2個の軸受46を介してブラケット41と支持軸45とを結合させることにより、ブラケット41は支持軸45の周りを回転可能に支持されている。そして、ブラケット41の他端には、先端が折り曲げられて平板状の規制部42が形成されており、規制部42はボビン通路17に突出可能となっている。
【0039】
ブラケット41の下端部には規制部42と反対方向に延長形成された延設部47が設けられており、延設部47には長孔状の挿通孔50が形成されこの挿通孔50にボルト48が挿通され、ナット49で締付け固定されている。尚、このボルト48とナット49でバランスウェイト51が構成されている。このバランスウェイト51の付勢力によりブラケット41は規制部42をボビン通路17内に突出させる方向の力を受けている。即ち、図6(b)に示すように、バランスウェイト51の付勢力によりブラケット41は支持軸45を中心として右回りに回動する方向に付勢され、このとき規制部42はボビン通路17内に突出された位置にある。
【0040】
補給された空ボビンBが規制部42と当接することにより、空ボビンBの姿勢が整えられるが、規制部42に空ボビンBの自重がかかることにより、規制部42は支持軸45の周りを回動しボビン通路17外に退出される。バランスウェイト51の付勢力の強さは、規制部42に空ボビンBの側面全体が当接し、空ボビンBの自重の大部分がかかった時に、規制部42が支持軸45の周りを回動しボビン通路17外に退避されるように、予め調整されているものとする。この調整は、挿通孔50の長孔に沿ってバランスウェイト51の位置調整を行うことによりなされる。
【0041】
尚、図6(b)に実線で示されるのは、ボビン姿勢制御部材40の規制部42がボビンホルダ12のボビン通路17内に突出された閉位置の状態を示し、仮想線で示されるのは、ボビン姿勢制御部材40の規制部42がボビン通路17内から退避された開位置の状態を示している。
この実施形態におけるボビン供給装置の作用については、第1の実施形態におけるつるまきばね31をバランスウェイト51に置き換えて考えれば良く同等なので説明を省略する。
【0042】
この実施形態に係る紡機におけるボビン供給装置によれば以下の効果を奏する。
尚、第1の実施形態における(1)、(4)の効果は同じであり、それ以外の効果を記載する。
(1)ボビン姿勢制御部材40は、規制部42に連設されたブラケット41と、該ブラケット41を回転可能に支持する支持軸45とを備え、ブラケット41の延設部47には規制部42を閉位置に回動させる方向にブラケット41を付勢する付勢手段(バランスウェイト51)が装着された簡単な構造なので、装置の簡略化を図れ設置スペースを削減可能である。
(2)ブラケット41の延設部47に設けられたバランスウェイト51の付勢力によりブラケット41は、ボビン通路17内に規制部42を突出させた閉位置に配置されている。この状態において、ボビンシュート11を介して空ボビンBが補給されると、補給された空ボビンBの側面が規制部42と当接することにより、空ボビンBの自重が規制部42に作用し、ブラケット41は支持軸45を中心にバランスウェイト51の付勢力とは反対方向に回動され、規制部42はボビン通路17内から退避された開位置に移動される。よって、ボビン姿勢制御部材40の規制部42を開閉作動させるために、バランスウェイト51を使用しているので、特別の駆動手段を用いる必要が無く、装置を簡略化でき取り付けを簡単に行える。また、バランスウェイト51を使用していることにより風綿等の堆積や、繰返し動作に対して優れた耐久性を有する。
(3)バランスウェイト51はボルト48とナット49で構成されており、長孔状の挿通孔50にボルト48が挿通され、ナット49で締付け固定されたものである。よって、バランスウェイト51の付勢力の強さは、挿通孔50の長孔に沿ってバランスウェイト51の位置調整を行うことによりなされるので、調整を簡単に行うことができる。
【0043】
なお、本発明は、上記した実施形態に限定されるものではなく発明の趣旨の範囲内で種々の変更が可能であり、例えば、次のように変更してもよい。
○ 第1、第2の実施形態では、フレームに固定された支持軸の周りをブラケットが回動可能に支持されているとして説明したが、ブラケット側に支持軸を設け、フレームに支持固定された軸受を介して回転可能としても良い。
○ 第1、第2の実施形態では、ボビン姿勢制御部材の規制部を長尺状の平板で形成するとして説明したが、空ボビンと当接する面は凹凸状に形成しても良く、また長手方向に鋸歯状としても良い。
○ 第2の実施形態ではバランスウェイトをボルトとナットで構成するとして説明したが、ウェイト部材を別途形成し、これを取り付けても良い。
○ 第1、第2の実施形態では、ブラケットを支持軸の周りに回転可能に取り付けるとして説明したが、支持軸に代えてヒンジ(蝶番)を用いヒンジを介して回転可能としても良い。
○ 第1、第2の実施形態では、ボビン姿勢制御部材の規制部の開閉作動を空ボビンの自重と付勢部材の付勢力のバランスを利用した制御として説明したが、ボビン姿勢制御部材の規制部の開閉作動をエアシリンダ、電磁バルブなどを用いて強制的に行わせても良い。例えば、ブラケットとエアシリンダを連結させ規制部への空ボビンの当接状態を検知する検知センサを別途設け、検知センサからの検知信号に基づきエアシリンダを駆動させることによりボビン姿勢制御部材の規制部の開閉作動を行わせるようにしても良い。
○ 各実施形態では、ボビン姿勢制御部材の規制部が支持軸を中心に回動することにより開閉作動が行われるとして説明したが、ボビン姿勢制御部材の規制部をボビン通路に対して直角方向にスライド可能に取り付けても良い。例えば、平板状の規制部をフレームに設けられたスリット孔にスライド可能に取り付け、駆動手段としてエアシリンダ、電磁バルブなどを用いても良い。
○ ゴム板などの平板状のフレキシブル部材をボビン通路内に通路を閉鎖するように配置し、補給された空ボビンがフレキシブル部材に当接することにより、空ボビンの自重でフレキシブル部材が変形しボビン通路が開状態となるようにしても良い。
○ 本発明は、精紡機のみならず粗紡機、撚糸機などに適用可能である。
【図面の簡単な説明】
【0044】
【図1】第1の実施形態に係るボビン供給装置の概略構成を示す正面図である。
【図2】図1のX−X線断面図である。
【図3】第1の実施形態に係るボビン姿勢制御部材の要部拡大図である。(a)要部拡大正面図である。(b)(a)のY−Y線断面図である。
【図4】第1の実施形態に係るボビン供給装置の作用説明用の模式図である。(a)補給された空ボビンの落下状態を示す。(b)ボビン姿勢制御部材に当接状態を示す。(c)ボビン貯留部への移動状態を示す。
【図5】第1の実施形態に係るボビン姿勢制御部材の作用説明用の模式図である。(a)空ボビンが規制部に当接した状態を示す。(b)空ボビンの自重で規制部が回動した状態を示す。(c)規制部がボビン通路より退避した状態を示す。(d)空ボビンが通過し規制部がボビン通路に復帰した状態を示す。
【図6】第2の実施形態に係るボビン姿勢制御部材の要部拡大図である。(a)要部拡大正面図である。(b)(a)のZ−Z線断面図である。
【図7】従来技術の説明用の模式図である。ペッグトレイ2個送りの設定の場合。
【図8】従来技術の説明用の模式図である。ペッグトレイ4個送りの設定の場合。
【符号の説明】
【0045】
10 ボビン供給装置
11 ボビンシュート
11a 側壁
12 ボビンホルダ
17 ボビン通路
18 開口部
20 ペッグトレイ
23 ボビン姿勢制御部材
26 規制部
31 ばね(つるまきばね)
51 バランスウェイト
B 空ボビン
【特許請求の範囲】
【請求項1】
補給された空ボビンを案内するボビンシュートと、該ボビンシュートと連結され、前記空ボビンを貯留する下方に傾斜したボビン通路及びペッグトレイに前記空ボビンを供給する開口部を有するボビンホルダとが設けられた紡機におけるボビン供給装置において、
前記ボビンシュートの側壁との間で前記空ボビンの傾きを直立状態に復帰可能な範囲で規制する規制部を備えたボビン姿勢制御手段を設け、
該ボビン姿勢制御手段の規制部を前記ボビンホルダのボビン通路内に突出させる閉位置と、前記ボビン通路内から退避させる開位置とに移動可能としたことを特徴とする紡機におけるボビン供給装置。
【請求項2】
前記ボビン姿勢制御手段は、前記規制部に連設されたブラケットと、該ブラケットを回転可能に支持する支持軸とを備え、前記ブラケットに前記規制部を前記閉位置に回動させる方向の付勢力を有する付勢手段を装着したことを特徴とする請求項1に記載の紡機におけるボビン供給装置。
【請求項3】
前記付勢手段がばねであることを特徴とする請求項2に記載の紡機におけるボビン供給装置。
【請求項4】
前記付勢手段がバランスウェイトであることを特徴とする請求項2に記載の紡機におけるボビン供給装置。
【請求項5】
前記ボビン姿勢制御手段の規制部は、前記ボビンホルダのボビン通路内に貯留される前記空ボビンの側面に沿うように延びる平板状部材で構成されることを特徴とする請求項1〜4のいずれか一項記載の紡機におけるボビン供給装置。
【請求項1】
補給された空ボビンを案内するボビンシュートと、該ボビンシュートと連結され、前記空ボビンを貯留する下方に傾斜したボビン通路及びペッグトレイに前記空ボビンを供給する開口部を有するボビンホルダとが設けられた紡機におけるボビン供給装置において、
前記ボビンシュートの側壁との間で前記空ボビンの傾きを直立状態に復帰可能な範囲で規制する規制部を備えたボビン姿勢制御手段を設け、
該ボビン姿勢制御手段の規制部を前記ボビンホルダのボビン通路内に突出させる閉位置と、前記ボビン通路内から退避させる開位置とに移動可能としたことを特徴とする紡機におけるボビン供給装置。
【請求項2】
前記ボビン姿勢制御手段は、前記規制部に連設されたブラケットと、該ブラケットを回転可能に支持する支持軸とを備え、前記ブラケットに前記規制部を前記閉位置に回動させる方向の付勢力を有する付勢手段を装着したことを特徴とする請求項1に記載の紡機におけるボビン供給装置。
【請求項3】
前記付勢手段がばねであることを特徴とする請求項2に記載の紡機におけるボビン供給装置。
【請求項4】
前記付勢手段がバランスウェイトであることを特徴とする請求項2に記載の紡機におけるボビン供給装置。
【請求項5】
前記ボビン姿勢制御手段の規制部は、前記ボビンホルダのボビン通路内に貯留される前記空ボビンの側面に沿うように延びる平板状部材で構成されることを特徴とする請求項1〜4のいずれか一項記載の紡機におけるボビン供給装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−24298(P2009−24298A)
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2007−190553(P2007−190553)
【出願日】平成19年7月23日(2007.7.23)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【Fターム(参考)】
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成19年7月23日(2007.7.23)
【出願人】(000003218)株式会社豊田自動織機 (4,162)
【Fターム(参考)】
[ Back to top ]