
紡機の牽伸システムに送給された複数本のスライバにおけるパラメータを検出する装置
【課題】構成が簡素であって個々のスライバを更に良好にかつ更に正確に検出する装置を提供する。
【解決手段】紡機の牽伸システムに送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動送給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置が提供される。構造的に簡素な様式で個々のスライバを更に良好にかつ更に正確に検出することを許容すべく、各触覚要素の位置を検出するために電気的評価ユニットに接続された非接触式距離センサ(距離測定センサ)が配備される。
【解決手段】紡機の牽伸システムに送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動送給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置が提供される。構造的に簡素な様式で個々のスライバを更に良好にかつ更に正確に検出することを許容すべく、各触覚要素の位置を検出するために電気的評価ユニットに接続された非接触式距離センサ(距離測定センサ)が配備される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紡機の牽伸システムに送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動供給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置に関する。
【背景技術】
【0002】
公知の装置(WO 98/18985 A)の場合には、8本のスライバに対し、牽伸システムから見て上流に、複数個の案内ローラ、ならびに、8個の測定要素および8個のケンスが配備されている。全ての測定要素は、リード線によりコンピュータに対して並列に接続される。上記測定要素は各々、被動ローラと、回転軸心の回りで変位可能なレバー上に取付けられた従動ロールとを備える。上記ローラはスライバに対する溝を有し、該溝はスライバを検知するために上記ロールによっても係合され得る。上記練篠システムに進入する各スライバは、パラメータを検出するために測定要素において予め検知される。可能的なパラメータは好適には、絶対値の形態の重量、太さ、質量などであるか、または、相対値、例えば重量、太さもしくは質量における変化である。このプロセスにおいて上記ロールは上記ローラ上のスライバにより占有された体積部分により偏向され、この偏向は該偏向に比例する出力信号へと変換される。全ての測定要素の出力信号は、上記リード線を介して上記コンピュータに送給される。各測定値はスレッショルド値と比較されることで、スライバが実際に存在すること、または、スライバが最小体積に到達したことが確認される。舌部および溝ローラから成るこの機械的感知システムによるこの動的関係は、高い吐出速度にては十分ではない。上記触覚ローラは、大きな質量により揺動(oscillate)せしめられることがある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
故に本発明は、冒頭部分に記述された種類の装置であって、上記不都合を回避し、特に構造が簡素であると共に個々のスライバを更に良好にかつ更に正確に検出し得る装置を実現するという課題に基づいている。
【課題を解決するための手段】
【0004】
上記課題は、請求項1の特徴部分の特徴により解決される。
すなわち、1番目の発明によれば、紡機の牽伸システムに対して送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動供給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置において、各触覚要素(9;9a〜9f、19;19a、19b、19c)の位置を検出する非接触式距離センサ(20;20a〜20f)(距離測定センサ)が設けられており、これら非接触式距離センサ(20;20a〜20f)は電気的評価デバイス(38)に接続されることを特徴とする、装置が提供される。
【0005】
本発明に係る非接触式距離センサ(距離を測定するセンサ)に依れば、構造的に簡素な様式で個々のスライバを更に良好にかつ更に正確に検出することが許容される。好適には、上記光学的距離センサの測定点は、たとえば運動可能に取付けられた圧力ロール・アーム上に配置される。初期始動(機械は停止)時に、上記圧力ロールはスライバなしで上記送給ローラ上に載置され、上記圧力ロールまでの距離が測定されて制御ユニットに記憶される。上記機械を停止し乍ら、次に上記圧力ロールと送給ローラとの間にスライバが載置される。スライバの太さにより上記距離センサと圧力ロールとの間の距離が減少され、上記制御ユニットは定常的に存在する信号を検出する。この信号は初期の始動時における値と比較されて、静止的なスライバが存在することが確立される。スライバが存在すること又は交換されたスライバが認識されることを確実にするために、存在するスライバによるこの測定は、上記機械が投入切換えされる前に自動的に常に行われるべきである。スライバの搬送(機械の運転)により、上記圧力ロールは今や持続的に揺動され、その結果としての距離の変動が検出され、連続的に改変可能な信号が測定され、上記制御ユニットは運動するスライバが存在することを検出する。もしスライバが裂断したなら、上記圧力ロールは上記送給ローラ上のスライバなしで運転され、測定信号は始動時の上記信号と比較され、始動時における測定値が検出されると共に、それを関数”機械運転”と組み合わせることで、上記制御ユニットは上記機械がスライバの存在なしで運転されていることを認識する。各信号を組み合わせることで上記制御ユニットが、上記機械は”動作の準備ができていない”ことを検出するという記述状態の全てにおいて、上記機械は動作不良であり作動停止される。プログラム技術により上記機械の関数と組み合わされて評価されるこれらの種々の信号を測定することにより、正確で間接的な光学的/超音波的距離測定に基づきローラ取入口における個々のスライバの効率的な監視が達成され得る。スライバ較正の夫々の個別値は、(たとえばスライバ監視に関する統計値すなわち変化可能な測定パラメータなどを用いる)プログラミングにより更に処理され得る。
【0006】
請求項2乃至50は、本発明の更なる好適な見地を包含している。
すなわち2番目の発明によれば、1番目の発明において、前記距離センサは、波または光線を用いて距離を測定するセンサである。
3番目の発明によれば、1番目または2番目の発明において、前記距離センサは光学的または音響的な距離測定センサである。
4番目の発明によれば、1番目から3番目のいずれかの発明において、超音波距離センサ(距離測定センサ)が使用される。
5番目の発明によれば、1番目から4番目のいずれかの発明において、光線または音線が焦点合わせされる。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記距離センサは光走査器である。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記距離センサは送信器および受信器から成る。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記距離センサはレーザ走査器である。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記距離センサは可視光線を使用する。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記距離センサは赤外光を使用する。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記距離センサは前記触覚要素までの距離を決定する。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記距離センサは、前記触覚要素と組み合わされた対向要素までの距離を決定する。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記距離センサは固定され、前記対向要素は該距離センサに対して運動可能である。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記距離センサは運動可能であり、前記対向要素は該距離センサに対して固定される。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記対向要素は平坦な走査表面を有する。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記対向要素は円滑な走査表面を有する。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記対向要素は湾曲した走査表面を有する。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記走査表面は反射的である。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記評価ユニットは開ループ/閉ループ制御デバイスに接続される。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記距離センサはアナログ・センサである。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記信号は測定点から評価ユニットまで光学的導波路を用いて導かれる。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記距離センサは可動触覚舌部の偏位を走査する。
23番目の発明によれば、1番目から22番目のいずれかの発明において、前記距離センサは可動触覚ローラの偏位を走査する。
24番目の発明によれば、1番目から23番目のいずれかの発明において、前記距離センサは前記触覚舌部または前記触覚ローラの偏位を直接的または間接的に走査する。
25番目の発明によれば、1番目から24番目のいずれかの発明において、当該装置はスライバの破断を確認して表示するために使用される。
26番目の発明によれば、1番目から25番目のいずれかの発明において、当該装置はスライバの運動を確認または表示するために使用される。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記距離センサは、長寸であって概ね撚り合わせられていない繊維束のパラメータを決定するために使用される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記距離センサは、連続的に移動する繊維束によるパラメータを測定するために使用される。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記スライバ質量に対して決定された値は、前記繊維束が練篠されつつある紡績用前処理機の少なくとも一個の牽伸要素を制御することによって上記繊維束のスライバ質量変動を調節するために使用される。
30番目の発明によれば、1番目から29番目のいずれかの発明において、前記触覚要素は固定された回動軸受上に取付けられる。
31番目の発明によれば、1番目から30番目のいずれかの発明において、前記触覚要素は回動可能取付けられたレバーである。
32番目の発明によれば、1番目から31番目のいずれかの発明において、前記触覚要素は、たとえば平衡錘、スプリングなどの力付与要素と協働する。
33番目の発明によれば、1番目から32番目のいずれかの発明において、前記触覚要素は水平方向に可動であるべく取付けられる。
34番目の発明によれば、1番目から33番目のいずれかの発明において、前記触覚要素は一端にて弾性的に取付けられる。
35番目の発明によれば、1番目から34番目のいずれかの発明において、前記触覚要素は、たとえばレバーなどの保持部材上に取付けられる。
36番目の発明によれば、1番目から35番目のいずれかの発明において、前記触覚要素は鉛直軸心の回りで回動可能に取付けられる。
37番目の発明によれば、1番目から36番目のいずれかの発明において、可動的に取付けられた前記触覚要素は、たとえばスプリング、重り、自然弾性、負荷シリンダ、磁石などの機械的、電気的、油圧的または空気的な手段により付勢されると共に調節可能とされ得る。
38番目の発明によれば、1番目から37番目のいずれかの発明において、複数個の距離センサが配備され、その各々は触覚要素によってスライバの太さを走査する(個別スライバ走査)。
39番目の発明によれば、1番目から38番目のいずれかの発明において、前記スライバは、入力部分において紡績用ケンスから複数の被動送給ローラ上へと引出されて、被動牽伸システムへと搬送される。
40番目の発明によれば、1番目から39番目のいずれかの発明において、前記送給ローラは固定される。
41番目の発明によれば、1番目から40番目のいずれかの発明において、各送給ローラ上には運動可能(偏向可能)な共回転ローラが位置する。
42番目の発明によれば、1番目から41番目のいずれかの発明において、前記運動可能ローラは回転式レバーにより回転式軸受上に取付けられる。
43番目の発明によれば、1番目から42番目のいずれかの発明において、前記距離センサは前記運動可能ローラおよび/または少なくとも一本の回転式レバーの偏向を検出し得る。
44番目の発明によれば、1番目から43番目のいずれかの発明において、前記距離センサと共に前記触覚要素は前記ケンスの出力部に配備される。
45番目の発明によれば、1番目から44番目のいずれかの発明において、前記距離センサと共に前記触覚要素は前記ケンスからスライバを取出す配置機構の一部を形成する。
46番目の発明によれば、1番目から45番目のいずれかの発明において、前記共回転ローラ(圧点)は自身の重量下で前記送給ローラ上に位置する。
47番目の発明によれば、1番目から46番目のいずれかの発明において、前記評価デバイスは多重チャネル評価デバイスから成る。
48番目の発明によれば、1番目から47番目のいずれかの発明において、各距離センサは個別に停止切換えされるべく配置される。
49番目の発明によれば、1番目から48番目のいずれかの発明において、前記送給ローラと前記共回転ローラ(圧力ロール)との2つの円筒状周囲表面の間にはローラ・ニップが在る。
50番目の発明によれば、1番目から49番目のいずれかの発明において、前記繊維束を搬送するときに前記圧力ロールは持続的に揺動する。
【発明を実施するための最良の形態】
【0007】
本発明は、図面に示された好適実施例に関して以下に詳細に説明される。
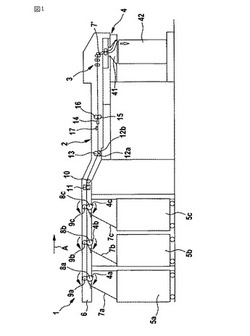
図1に係る側面図は、たとえばTruetzschler練篠フレームTD 03などの練篠フレームの入力領域1、送給領域2、牽伸システム3およびスライバ巻取り領域4を示している。入力領域1においては、スライバ案内プレート(軸架[creel])の下方において練篠フレームの3個の紡績用ケンス5a〜5c(丸形のケンス)が2列のケンスを以て配置され(図2参照)、且つ、送給スライバ7a〜7cは送給ローラ8a〜8c上へと引出されて練篠フレーム3に供給される。共回転する頂部ローラ9a〜9cが夫々の被動送給ローラ8a〜8cに組み合わされる。送給テーブル領域においては、各対が頂部ローラおよび送給ローラを備える6つのローラ対8、9が存在する(図2参照)。スライバ7a〜7cは、紡績用ケンス5a〜5cから揚動されると共に、送給テーブル6上において牽伸システム3まで案内される。牽伸システム3を通過した後、引出されたスライバ7’はケンス用巻取器(カンコイラ)の回転プレートに進入すると共に、吐出側ケンス内にコイル状に布置される。送給テーブル6は、上記スライバ送給デバイス全体の領域を横切って上記練篠フレームまで延在する。スライバ7が各紡績用ケンス5から上記スライバ送給デバイスを介して上記練篠フレームまで供給される。各々がローラ対8a、9a;8b、9b;8c、9c(ローラ取入口)を備えるという夫々のスライバ送給点を通じて送給作用が行われる。各下側ローラ8a〜8cの領域においては、スライバ7を案内する夫々の案内要素が配備される。記号Aは、スライバ7a、7bおよび7cの進行方向を表している。スライバ7a〜7cは、ローラ対8、9間に圧搾される。送給ローラ8a〜8cおよび頂部ローラ9a〜9cの回転方向は、夫々の湾曲矢印により表される。各送給ローラ8は駆動手段に接続される。送給テーブル6の出力部には、スライバ7a〜7fに対する案内デバイスが存在しており、この案内デバイスは円筒状の断面を有すると共に8個の円筒体11a〜11hが後側に固着された水平バー10を含んでいる。円筒体11a〜11hの軸心は鉛直方向に整列され、円筒体11a〜11hの円筒体ケーシング間の間隔は、夫々のスライバ7a〜7fが阻害されることなく通過するのに十分なほど大寸である。この手段により、頂部が開放した案内溝がスライバ7a〜7fのために形成され、すなわち、円筒体11a〜11hは案内要素として機能する。送給テーブル6に続いては、練篠フレームに対する入力部にて、たとえば2個の張設用底部ローラ12a、12bおよび1個の張設用頂部ローラ13である被動ローラ配置機構が存在する。
【0008】
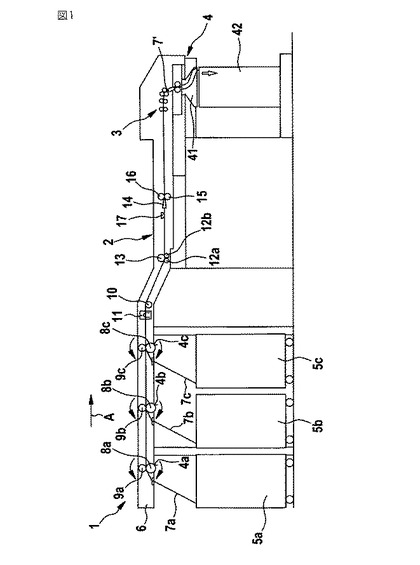
図2に示された如く送給テーブル6の各側部においては、3個の紡績用ケンス5(不図示)の列が互いに平行に設定される。作動時には、スライバ7は6個の紡績用ケンスの各々から同時に引出され得る。あるいは、動作の様式は、たとえばスライバ7が3個の紡績用ケンス5a〜5cから一側においてのみ引出されると共に、他側においては3個の紡績用ケンス5d〜5fが交換中であってもよい。更に送給テーブル6の各側においては、作用方向Aにおいて順番に三つの送給ローラ8a、8b、8cおよび8d、8e、8fがそれぞれ配置される。2つの送給ローラ8a、8d;8b、8e;8c、8fのそれぞれは互いに同軸に配置される。送給ローラ8a〜8fは、同一の直径、たとえば100mmの直径を有する。各送給ローラの回転速度nは作用方向Aにおいて減少し、すなわちn1>n2>n3である。故に各送給ローラ8の円周速度Uは、上記作用方向において減少する。故に各送給ローラ8の円周速度U1、U2、U3を調節し、それにより、全てのスライバ7の入力張力を所望のようにすることができる。各送給ローラ8は(不図示の)ギヤ機構または同様の伝達デバイスにより駆動される。(不図示の)ベルトを介して駆動力を送給ローラ8a〜8fに伝達する可変速度モータ31(図6参照)が駆動のために用いられる。送給ローラ8の各々は、(それ自体公知の様式で)二部材式構成であると共に、互いに異なる長さである。入力領域1における各スライバ7の長さは内側から外側にかけて減少する。図1、図2に依ると、スライバ7a〜7fは入力領域1の送給テーブル6から、案内デバイス(ロッド10、円筒体11a〜11f)を介し、張設ローラ配置機構12、13と、搬送ローラ15および16を備えた(測定デバイスを含む)スライバ案内部材14とを通り、牽伸システム3とウェブ案内部材27と吐出ローラ28、29を備えたスライバ・ファネル30と回転プレート41とを通り、ケンス42内へと進行する。
【0009】
図2は、全てが下側に配置されたローラ8a〜8f、12a、12b、15、III、IIおよびIを示している。図2に依れば、ローラ対8、9と張設ローラ配置機構12、13との間の領域において6本のスライバ7を含む繊維束は入力軸架張力を受けており、張設ローラ配置機構12、13と搬送ローラ15、16との間の領域において6本のスライバ7を含む繊維束は張設ローラの張力を受けており、且つ、搬送ローラ15、16と牽伸システム3の送給ローラ26、IIIとの間の領域において6本のスライバ7を含む繊維束は搬送ローラの張力を受けている。
【0010】
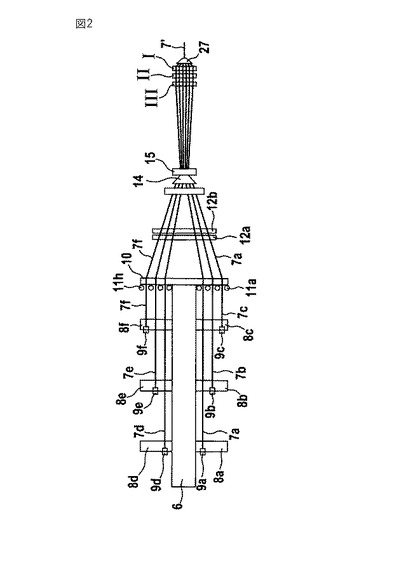
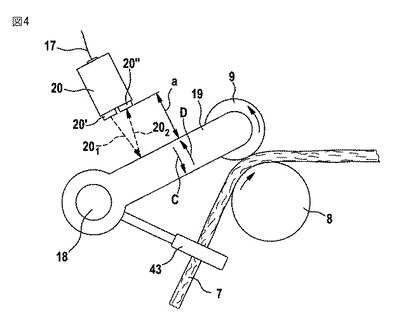
図3を参照すると、たとえばスライバ7a’は、方向Bにおいてケンス5aから引出され、スライバ案内部材43の開口部(挿通用鳩目)を貫通して方向Aに進路変更され、最終的にはスライバ7a”の形態で、被動送給ローラ8および共回転する頂部ローラ9の間のローラ・ニップを通過する。頂部ローラ9は回動可能な加重レバー19の一端に回転可能に固着される。加重レバー19の他端はスライバ送給テーブル6上に取付けられた静止的な支持バー18に固着される。加重レバー19は矢印C、Dの方向に回動可能である。保持要素44を介して支持バー18に固定的に固着された光走査器20が距離センサとして加重レバー19の上方に配備される。図4に依れば、距離センサ20(光センサ)は光送信器20’および光受信器20”から成る。光送信器20’により発せられた光線201は加重レバー19の円滑表面により反射され、反射された光線202は光受信器20”により受信される。参照番号17は電気リード線を表し、距離センサ20はこのリード線を通じて評価ユニット(図6における電子的制御/調整デバイス38を参照)に接続される。文字”a”は、一方では光送信器20’と光受信器20”との間の距離、他方では光送信器20’と加重レバー19との間の距離を表している。
【0011】
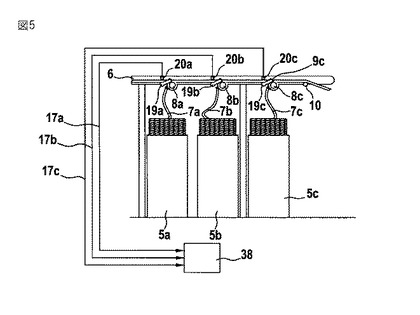
図5に依ると、各加重レバー19a、19b、19cには、夫々の光走査器20a、20b、20cが組み合わされる。光走査器20a、20bおよび20cは夫々のライン17a、17b、17cを介して、電子的評価手段として作用する制御/調整デバイス38(図6参照)に接続される。リード線17a、17b、17cは、電気パルスを伝達する。
【0012】
リード線17a、17b、17cは、光ファイバ・ケーブルの形態であってもよい。その場合、光パルスを電気パルスに変換する(不図示の)信号変換器を各光走査器20と開ループ/閉ループ制御器との間に配置する必要がある。
【0013】
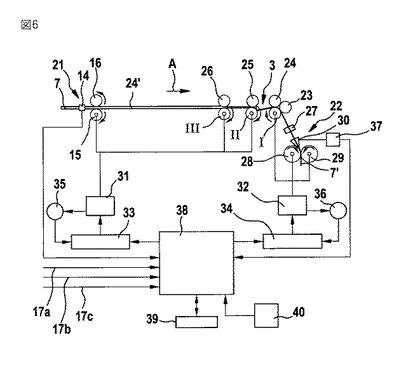
図6に依ると、上記練篠フレームは牽伸システム3を備え、その上流には牽伸システム取入口21が配置されると共に下流には牽伸システム吐出口22が配置されている。取出しローラ15、16により引出された各スライバ7は、測定要素14を通過して搬送される。牽伸システム3はフォー・オーバー・スリー牽伸システムとして設計され、すなわち該システムは、3個の底部ローラI、II、III(Iは底部吐出ローラ、IIは中央底部ローラ、および、IIIは底部送給ローラ)と、4個の頂部ローラ23、24、25、26とから成る。数本のスライバ7a〜7fから成る繊維束7の牽伸作用は牽伸システム3において行われる。牽伸システムは、予備牽伸部および主要牽伸部から成る。ローラ対26/IIIおよび25/IIは予備牽伸領域を形成し、ローラ対25/IIおよび23、24/Iは主要牽伸領域を形成する。引出されたスライバ7は牽伸システム吐出口22におけるウェブ案内部材27に到達して、スライバ・ファネル30を通して吐出ローラ28、29により引出される。スライバ・ファネル30においてはスライバ7はスライバ7’へと集束され、該スライバは引き続きケンス42内へと布置される。歯付きベルトを介して機械的に結合された取出ローラ15、16、底部送給ローラIIIおよび中央底部ローラIIは、所望の値が予め設定され得る可変速度モータ31により駆動される(関係付けられた頂部ローラ26および25は共回転する)。底部吐出ローラIおよび吐出ローラ28、29は主要モータ32により駆動される。可変速度モータ31および主要モータ32の各々は自身の閉ループ・システム33、34を有する。制御(速度制御)は閉制御ループにより行われ、タコジェネレータ35が上記可変速度モータに組み合わされており、タコジェネレータ36が主要モータ32に組み合わされる。上記牽伸システムの吐出口22においては、出現するスライバ7’の質量に比例するたとえば断面積などの変数が、スライバ・ファネル30に組み合わされた吐出測定要素37から獲得される。たとえばマイクロプロセッサを備えたマイクロコンピュータである中央処理ユニット38(開ループ/閉ループ制御器)は、可変速度モータ31に対する所望の変数の設定をコントローラ33に伝達する。測定要素14の測定済み変数は、牽伸操作の間において上記中央処理ユニットに伝達される。可変速度モータ31のために処理された値は、測定要素14からの測定済み変数と、出現するスライバ7’の断面積に対する所望値とに基づいて、中央処理ユニット38にて決定される。吐出測定要素37の測定済み変数は、出現するスライバ7’を監視する役目を果たす(出力スライバ監視)。この制御システムを用いると、ケンス内に送給されるスライバ7の断面積の変動は、予備牽伸プロセスの対応した調整作用により補償され得ると共に、スライバ7’は均一化され得る。参照番号39は入力デバイスを表し、且つ、参照番号40はたとえば視覚的表示ユニットなどの表示手段を表す。17a、17b、17cは、図5に示された如く光走査器20a、20bおよび20cを処理ユニット38(評価ユニット)に夫々接続するリード線を表す。
【0014】
図6は、オートレベラの例を用いて記述された。非調整式の練篠フレームも包含される。
【0015】
(最大で8本である)スライバ7は、送給軸架6に取付けられた練篠フレームを通じてケンス5から該送給軸架上へと引出される。該ローラ軸架は主として、2個の支持体および1本のビームを備えて成る。送給ローラが支持バー18および圧力ロール9によってこのビーム上に取付けられている。送給ローラ8は、上記練篠フレームにより駆動される。スライバ案内部材43と、圧力ロール9を備えた支持バー18とが送給ローラに取付けられる。安定化させるために、スライバ7はまずスライバ案内部材43を通じて案内され、次いで上記練篠フレームに向けて被動送給ローラ8上を案内される。可動アーム19を介して支持バー18に接続された圧力ロール9が該スライバ7上に位置すると共にその比較的に大きい自重の故に圧力ロール9が該スライバ7を送給ローラ8上に押圧するときにのみ、スライバ7は送給ローラ8により搬送され得る。故にスライバ7は、送給ローラ8と圧力ロール9との間で一定度合いまで加圧される。圧力ロール9は回転可能に取付けられており、それにより、スライバ7は損傷を蒙ることなしに移動されるようになる。
【0016】
圧力ロール9と共に存在する支持バー18上に距離センサ、たとえば(選択的に光ファイバ・ケーブルと共に)光学的距離センサ20などを取付けることにより、圧力ロール9に対する距離測定を行って結果的にスライバの状態を検出することが可能である。その利点は、個々のスライバに対して、完全に機械的に離間された非接触式の監視が個別に行えることである。以下に記述される動作状態は、距離測定と上記機械の動作状態とを結び付けるプログラムから得られる。
【0017】
圧力ロールは存在する。
スライバは存在し、スライバは静止的であり、機械は停止している。
スライバは存在し、スライバは静止的であり、機械は運転されている。
スライバは存在し、スライバは運動しており、機械は停止している。
スライバは存在し、スライバは運動しており、機械は運転されている。
スライバは存在せず、機械は停止している。
スライバは存在せず、機械は運転されている。
【0018】
この評価のシーケンスは、以下の如く展開される。
光学的距離センサ20は圧力ロール9のアーム19上に測定点を有し、該アームはたとえば運動可能に取付けられている。最初の命令時(機械は停止している)に、圧力ロール9はスライバ7なしで送給ローラ8上に載置され、圧力ロール9に対する距離が測定されて制御ユニット38に記憶される。次に、機械は停止された状態で、スライバ7が圧力ロール9と送給ローラ8との間に載置され得る。スライバ7の太さにより距離センサ20と圧力ロール9との間の距離は減少されると共に制御ユニット38は定常的に存在する信号を検出する。この信号は初期始動時における値と比較されて、静止的に存在するスライバ7が検出される。スライバ7が存在すること又は交換されたスライバ7が認識されたことを確実にするために、存在するスライバ7によるこの測定は、上記機械が投入切換えされる前に自動的に常に行う必要がある。スライバ7の搬送(機械の運転)により、圧力ロール9は今や持続的に揺動され、その結果としての距離の変動が検出され、連続的に変化可能な信号が測定され、制御ユニット38はスライバ7が存在して運動していることを検出する。スライバ7が裂断した場合には、圧力ロール9は上記送給ローラ上のスライバ7なしで運転され、測定信号は始動時の上記信号と比較され、始動時における測定値が検出されると共に、それを関数”機械運転”と組み合わせることで、制御ユニット38は上記機械がスライバの存在なしで運転されていることを認識する。各信号を組み合わせることにより制御ユニット38が上記機械は”動作の準備ができていない”ことを検出したという前述した状態の全てにおいては、上記機械は動作不良であり、作動停止される。プログラム技術により上記機械の関数と組み合わされて評価されるこれらの種々の信号を測定することにより、正確で間接的な光学的距離測定に基づいて、ローラ取入口における個々のスライバの効率的な監視を行うことができる。スライバ較正の夫々の個別値は、(たとえばスライバ監視に関する統計値すなわち変化可能な測定パラメータなどを用いる)プログラミングにより更に処理され得る。好適には、8チャネルの評価ユニットが使用され得る。更に、制御工学方法により個々のスライバ監視を停止切換えし得ることが好ましい。
【図面の簡単な説明】
【0019】
【図1】本発明に係る装置を備えた練篠フレームの送給テーブルの概略図である。
【図2】図1に対応する平面図である。
【図3】送給ローラと光走査器を備えた頂部ローラとの間におけるスライバ案内部材によるスライバの進路変更を示す平面図である。
【図4】図3に対応する側面図である。
【図5】三対の送給ローラおよび頂部ローラを備えると共に夫々の光走査器が加重レバーに組み合わされた送給テーブルの側面図である。
【図6】練篠フレームに対する電子的な開ループ/閉ループ制御デバイスのブロック図である。
【符号の説明】
【0020】
1 入力領域
3 牽伸システム、練篠フレーム
4 スライバ巻取り領域
5a〜5f 紡績用ケンス
6 スライバ送給テーブル
7 スライバ
7a〜7f スライバ
8a〜8f 送給ローラ
9a〜9f 頂部ローラ
10 水平バー
11a〜11h 円筒体
12a、12b 張設用底部ローラ
13 張設用頂部ローラ
14 測定要素
15、16 搬送ローラ
17a、17b、17c リード線
18 支持バー
19a、19b、19c 加重レバー
20、20a、20b、20c 距離センサ、光走査器
20’ 光送信器
20” 光受信器
201 光線
202 光線
21 牽伸システム取入口
22 牽伸システム吐出口
23、24、25、26 頂部ローラ
27 ウェブ案内部材
28、29 吐出ローラ
30 ファネル
31 可変速度モータ
32 主要モータ
33 コントローラ
33、34 システム
35 タコジェネレータ
36 タコジェネレータ
37 吐出測定要素
38 処理ユニット
39 入力デバイス
40 表示手段
41 回転プレート
42 ケンス
43 スライバ案内部材
44 保持要素
I、II、III 底部ローラ
【技術分野】
【0001】
本発明は、紡機の牽伸システムに送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動供給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置に関する。
【背景技術】
【0002】
公知の装置(WO 98/18985 A)の場合には、8本のスライバに対し、牽伸システムから見て上流に、複数個の案内ローラ、ならびに、8個の測定要素および8個のケンスが配備されている。全ての測定要素は、リード線によりコンピュータに対して並列に接続される。上記測定要素は各々、被動ローラと、回転軸心の回りで変位可能なレバー上に取付けられた従動ロールとを備える。上記ローラはスライバに対する溝を有し、該溝はスライバを検知するために上記ロールによっても係合され得る。上記練篠システムに進入する各スライバは、パラメータを検出するために測定要素において予め検知される。可能的なパラメータは好適には、絶対値の形態の重量、太さ、質量などであるか、または、相対値、例えば重量、太さもしくは質量における変化である。このプロセスにおいて上記ロールは上記ローラ上のスライバにより占有された体積部分により偏向され、この偏向は該偏向に比例する出力信号へと変換される。全ての測定要素の出力信号は、上記リード線を介して上記コンピュータに送給される。各測定値はスレッショルド値と比較されることで、スライバが実際に存在すること、または、スライバが最小体積に到達したことが確認される。舌部および溝ローラから成るこの機械的感知システムによるこの動的関係は、高い吐出速度にては十分ではない。上記触覚ローラは、大きな質量により揺動(oscillate)せしめられることがある。
【発明の開示】
【発明が解決しようとする課題】
【0003】
故に本発明は、冒頭部分に記述された種類の装置であって、上記不都合を回避し、特に構造が簡素であると共に個々のスライバを更に良好にかつ更に正確に検出し得る装置を実現するという課題に基づいている。
【課題を解決するための手段】
【0004】
上記課題は、請求項1の特徴部分の特徴により解決される。
すなわち、1番目の発明によれば、紡機の牽伸システムに対して送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動供給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置において、各触覚要素(9;9a〜9f、19;19a、19b、19c)の位置を検出する非接触式距離センサ(20;20a〜20f)(距離測定センサ)が設けられており、これら非接触式距離センサ(20;20a〜20f)は電気的評価デバイス(38)に接続されることを特徴とする、装置が提供される。
【0005】
本発明に係る非接触式距離センサ(距離を測定するセンサ)に依れば、構造的に簡素な様式で個々のスライバを更に良好にかつ更に正確に検出することが許容される。好適には、上記光学的距離センサの測定点は、たとえば運動可能に取付けられた圧力ロール・アーム上に配置される。初期始動(機械は停止)時に、上記圧力ロールはスライバなしで上記送給ローラ上に載置され、上記圧力ロールまでの距離が測定されて制御ユニットに記憶される。上記機械を停止し乍ら、次に上記圧力ロールと送給ローラとの間にスライバが載置される。スライバの太さにより上記距離センサと圧力ロールとの間の距離が減少され、上記制御ユニットは定常的に存在する信号を検出する。この信号は初期の始動時における値と比較されて、静止的なスライバが存在することが確立される。スライバが存在すること又は交換されたスライバが認識されることを確実にするために、存在するスライバによるこの測定は、上記機械が投入切換えされる前に自動的に常に行われるべきである。スライバの搬送(機械の運転)により、上記圧力ロールは今や持続的に揺動され、その結果としての距離の変動が検出され、連続的に改変可能な信号が測定され、上記制御ユニットは運動するスライバが存在することを検出する。もしスライバが裂断したなら、上記圧力ロールは上記送給ローラ上のスライバなしで運転され、測定信号は始動時の上記信号と比較され、始動時における測定値が検出されると共に、それを関数”機械運転”と組み合わせることで、上記制御ユニットは上記機械がスライバの存在なしで運転されていることを認識する。各信号を組み合わせることで上記制御ユニットが、上記機械は”動作の準備ができていない”ことを検出するという記述状態の全てにおいて、上記機械は動作不良であり作動停止される。プログラム技術により上記機械の関数と組み合わされて評価されるこれらの種々の信号を測定することにより、正確で間接的な光学的/超音波的距離測定に基づきローラ取入口における個々のスライバの効率的な監視が達成され得る。スライバ較正の夫々の個別値は、(たとえばスライバ監視に関する統計値すなわち変化可能な測定パラメータなどを用いる)プログラミングにより更に処理され得る。
【0006】
請求項2乃至50は、本発明の更なる好適な見地を包含している。
すなわち2番目の発明によれば、1番目の発明において、前記距離センサは、波または光線を用いて距離を測定するセンサである。
3番目の発明によれば、1番目または2番目の発明において、前記距離センサは光学的または音響的な距離測定センサである。
4番目の発明によれば、1番目から3番目のいずれかの発明において、超音波距離センサ(距離測定センサ)が使用される。
5番目の発明によれば、1番目から4番目のいずれかの発明において、光線または音線が焦点合わせされる。
6番目の発明によれば、1番目から5番目のいずれかの発明において、前記距離センサは光走査器である。
7番目の発明によれば、1番目から6番目のいずれかの発明において、前記距離センサは送信器および受信器から成る。
8番目の発明によれば、1番目から7番目のいずれかの発明において、前記距離センサはレーザ走査器である。
9番目の発明によれば、1番目から8番目のいずれかの発明において、前記距離センサは可視光線を使用する。
10番目の発明によれば、1番目から9番目のいずれかの発明において、前記距離センサは赤外光を使用する。
11番目の発明によれば、1番目から10番目のいずれかの発明において、前記距離センサは前記触覚要素までの距離を決定する。
12番目の発明によれば、1番目から11番目のいずれかの発明において、前記距離センサは、前記触覚要素と組み合わされた対向要素までの距離を決定する。
13番目の発明によれば、1番目から12番目のいずれかの発明において、前記距離センサは固定され、前記対向要素は該距離センサに対して運動可能である。
14番目の発明によれば、1番目から13番目のいずれかの発明において、前記距離センサは運動可能であり、前記対向要素は該距離センサに対して固定される。
15番目の発明によれば、1番目から14番目のいずれかの発明において、前記対向要素は平坦な走査表面を有する。
16番目の発明によれば、1番目から15番目のいずれかの発明において、前記対向要素は円滑な走査表面を有する。
17番目の発明によれば、1番目から16番目のいずれかの発明において、前記対向要素は湾曲した走査表面を有する。
18番目の発明によれば、1番目から17番目のいずれかの発明において、前記走査表面は反射的である。
19番目の発明によれば、1番目から18番目のいずれかの発明において、前記評価ユニットは開ループ/閉ループ制御デバイスに接続される。
20番目の発明によれば、1番目から19番目のいずれかの発明において、前記距離センサはアナログ・センサである。
21番目の発明によれば、1番目から20番目のいずれかの発明において、前記信号は測定点から評価ユニットまで光学的導波路を用いて導かれる。
22番目の発明によれば、1番目から21番目のいずれかの発明において、前記距離センサは可動触覚舌部の偏位を走査する。
23番目の発明によれば、1番目から22番目のいずれかの発明において、前記距離センサは可動触覚ローラの偏位を走査する。
24番目の発明によれば、1番目から23番目のいずれかの発明において、前記距離センサは前記触覚舌部または前記触覚ローラの偏位を直接的または間接的に走査する。
25番目の発明によれば、1番目から24番目のいずれかの発明において、当該装置はスライバの破断を確認して表示するために使用される。
26番目の発明によれば、1番目から25番目のいずれかの発明において、当該装置はスライバの運動を確認または表示するために使用される。
27番目の発明によれば、1番目から26番目のいずれかの発明において、前記距離センサは、長寸であって概ね撚り合わせられていない繊維束のパラメータを決定するために使用される。
28番目の発明によれば、1番目から27番目のいずれかの発明において、前記距離センサは、連続的に移動する繊維束によるパラメータを測定するために使用される。
29番目の発明によれば、1番目から28番目のいずれかの発明において、前記スライバ質量に対して決定された値は、前記繊維束が練篠されつつある紡績用前処理機の少なくとも一個の牽伸要素を制御することによって上記繊維束のスライバ質量変動を調節するために使用される。
30番目の発明によれば、1番目から29番目のいずれかの発明において、前記触覚要素は固定された回動軸受上に取付けられる。
31番目の発明によれば、1番目から30番目のいずれかの発明において、前記触覚要素は回動可能取付けられたレバーである。
32番目の発明によれば、1番目から31番目のいずれかの発明において、前記触覚要素は、たとえば平衡錘、スプリングなどの力付与要素と協働する。
33番目の発明によれば、1番目から32番目のいずれかの発明において、前記触覚要素は水平方向に可動であるべく取付けられる。
34番目の発明によれば、1番目から33番目のいずれかの発明において、前記触覚要素は一端にて弾性的に取付けられる。
35番目の発明によれば、1番目から34番目のいずれかの発明において、前記触覚要素は、たとえばレバーなどの保持部材上に取付けられる。
36番目の発明によれば、1番目から35番目のいずれかの発明において、前記触覚要素は鉛直軸心の回りで回動可能に取付けられる。
37番目の発明によれば、1番目から36番目のいずれかの発明において、可動的に取付けられた前記触覚要素は、たとえばスプリング、重り、自然弾性、負荷シリンダ、磁石などの機械的、電気的、油圧的または空気的な手段により付勢されると共に調節可能とされ得る。
38番目の発明によれば、1番目から37番目のいずれかの発明において、複数個の距離センサが配備され、その各々は触覚要素によってスライバの太さを走査する(個別スライバ走査)。
39番目の発明によれば、1番目から38番目のいずれかの発明において、前記スライバは、入力部分において紡績用ケンスから複数の被動送給ローラ上へと引出されて、被動牽伸システムへと搬送される。
40番目の発明によれば、1番目から39番目のいずれかの発明において、前記送給ローラは固定される。
41番目の発明によれば、1番目から40番目のいずれかの発明において、各送給ローラ上には運動可能(偏向可能)な共回転ローラが位置する。
42番目の発明によれば、1番目から41番目のいずれかの発明において、前記運動可能ローラは回転式レバーにより回転式軸受上に取付けられる。
43番目の発明によれば、1番目から42番目のいずれかの発明において、前記距離センサは前記運動可能ローラおよび/または少なくとも一本の回転式レバーの偏向を検出し得る。
44番目の発明によれば、1番目から43番目のいずれかの発明において、前記距離センサと共に前記触覚要素は前記ケンスの出力部に配備される。
45番目の発明によれば、1番目から44番目のいずれかの発明において、前記距離センサと共に前記触覚要素は前記ケンスからスライバを取出す配置機構の一部を形成する。
46番目の発明によれば、1番目から45番目のいずれかの発明において、前記共回転ローラ(圧点)は自身の重量下で前記送給ローラ上に位置する。
47番目の発明によれば、1番目から46番目のいずれかの発明において、前記評価デバイスは多重チャネル評価デバイスから成る。
48番目の発明によれば、1番目から47番目のいずれかの発明において、各距離センサは個別に停止切換えされるべく配置される。
49番目の発明によれば、1番目から48番目のいずれかの発明において、前記送給ローラと前記共回転ローラ(圧力ロール)との2つの円筒状周囲表面の間にはローラ・ニップが在る。
50番目の発明によれば、1番目から49番目のいずれかの発明において、前記繊維束を搬送するときに前記圧力ロールは持続的に揺動する。
【発明を実施するための最良の形態】
【0007】
本発明は、図面に示された好適実施例に関して以下に詳細に説明される。
図1に係る側面図は、たとえばTruetzschler練篠フレームTD 03などの練篠フレームの入力領域1、送給領域2、牽伸システム3およびスライバ巻取り領域4を示している。入力領域1においては、スライバ案内プレート(軸架[creel])の下方において練篠フレームの3個の紡績用ケンス5a〜5c(丸形のケンス)が2列のケンスを以て配置され(図2参照)、且つ、送給スライバ7a〜7cは送給ローラ8a〜8c上へと引出されて練篠フレーム3に供給される。共回転する頂部ローラ9a〜9cが夫々の被動送給ローラ8a〜8cに組み合わされる。送給テーブル領域においては、各対が頂部ローラおよび送給ローラを備える6つのローラ対8、9が存在する(図2参照)。スライバ7a〜7cは、紡績用ケンス5a〜5cから揚動されると共に、送給テーブル6上において牽伸システム3まで案内される。牽伸システム3を通過した後、引出されたスライバ7’はケンス用巻取器(カンコイラ)の回転プレートに進入すると共に、吐出側ケンス内にコイル状に布置される。送給テーブル6は、上記スライバ送給デバイス全体の領域を横切って上記練篠フレームまで延在する。スライバ7が各紡績用ケンス5から上記スライバ送給デバイスを介して上記練篠フレームまで供給される。各々がローラ対8a、9a;8b、9b;8c、9c(ローラ取入口)を備えるという夫々のスライバ送給点を通じて送給作用が行われる。各下側ローラ8a〜8cの領域においては、スライバ7を案内する夫々の案内要素が配備される。記号Aは、スライバ7a、7bおよび7cの進行方向を表している。スライバ7a〜7cは、ローラ対8、9間に圧搾される。送給ローラ8a〜8cおよび頂部ローラ9a〜9cの回転方向は、夫々の湾曲矢印により表される。各送給ローラ8は駆動手段に接続される。送給テーブル6の出力部には、スライバ7a〜7fに対する案内デバイスが存在しており、この案内デバイスは円筒状の断面を有すると共に8個の円筒体11a〜11hが後側に固着された水平バー10を含んでいる。円筒体11a〜11hの軸心は鉛直方向に整列され、円筒体11a〜11hの円筒体ケーシング間の間隔は、夫々のスライバ7a〜7fが阻害されることなく通過するのに十分なほど大寸である。この手段により、頂部が開放した案内溝がスライバ7a〜7fのために形成され、すなわち、円筒体11a〜11hは案内要素として機能する。送給テーブル6に続いては、練篠フレームに対する入力部にて、たとえば2個の張設用底部ローラ12a、12bおよび1個の張設用頂部ローラ13である被動ローラ配置機構が存在する。
【0008】
図2に示された如く送給テーブル6の各側部においては、3個の紡績用ケンス5(不図示)の列が互いに平行に設定される。作動時には、スライバ7は6個の紡績用ケンスの各々から同時に引出され得る。あるいは、動作の様式は、たとえばスライバ7が3個の紡績用ケンス5a〜5cから一側においてのみ引出されると共に、他側においては3個の紡績用ケンス5d〜5fが交換中であってもよい。更に送給テーブル6の各側においては、作用方向Aにおいて順番に三つの送給ローラ8a、8b、8cおよび8d、8e、8fがそれぞれ配置される。2つの送給ローラ8a、8d;8b、8e;8c、8fのそれぞれは互いに同軸に配置される。送給ローラ8a〜8fは、同一の直径、たとえば100mmの直径を有する。各送給ローラの回転速度nは作用方向Aにおいて減少し、すなわちn1>n2>n3である。故に各送給ローラ8の円周速度Uは、上記作用方向において減少する。故に各送給ローラ8の円周速度U1、U2、U3を調節し、それにより、全てのスライバ7の入力張力を所望のようにすることができる。各送給ローラ8は(不図示の)ギヤ機構または同様の伝達デバイスにより駆動される。(不図示の)ベルトを介して駆動力を送給ローラ8a〜8fに伝達する可変速度モータ31(図6参照)が駆動のために用いられる。送給ローラ8の各々は、(それ自体公知の様式で)二部材式構成であると共に、互いに異なる長さである。入力領域1における各スライバ7の長さは内側から外側にかけて減少する。図1、図2に依ると、スライバ7a〜7fは入力領域1の送給テーブル6から、案内デバイス(ロッド10、円筒体11a〜11f)を介し、張設ローラ配置機構12、13と、搬送ローラ15および16を備えた(測定デバイスを含む)スライバ案内部材14とを通り、牽伸システム3とウェブ案内部材27と吐出ローラ28、29を備えたスライバ・ファネル30と回転プレート41とを通り、ケンス42内へと進行する。
【0009】
図2は、全てが下側に配置されたローラ8a〜8f、12a、12b、15、III、IIおよびIを示している。図2に依れば、ローラ対8、9と張設ローラ配置機構12、13との間の領域において6本のスライバ7を含む繊維束は入力軸架張力を受けており、張設ローラ配置機構12、13と搬送ローラ15、16との間の領域において6本のスライバ7を含む繊維束は張設ローラの張力を受けており、且つ、搬送ローラ15、16と牽伸システム3の送給ローラ26、IIIとの間の領域において6本のスライバ7を含む繊維束は搬送ローラの張力を受けている。
【0010】
図3を参照すると、たとえばスライバ7a’は、方向Bにおいてケンス5aから引出され、スライバ案内部材43の開口部(挿通用鳩目)を貫通して方向Aに進路変更され、最終的にはスライバ7a”の形態で、被動送給ローラ8および共回転する頂部ローラ9の間のローラ・ニップを通過する。頂部ローラ9は回動可能な加重レバー19の一端に回転可能に固着される。加重レバー19の他端はスライバ送給テーブル6上に取付けられた静止的な支持バー18に固着される。加重レバー19は矢印C、Dの方向に回動可能である。保持要素44を介して支持バー18に固定的に固着された光走査器20が距離センサとして加重レバー19の上方に配備される。図4に依れば、距離センサ20(光センサ)は光送信器20’および光受信器20”から成る。光送信器20’により発せられた光線201は加重レバー19の円滑表面により反射され、反射された光線202は光受信器20”により受信される。参照番号17は電気リード線を表し、距離センサ20はこのリード線を通じて評価ユニット(図6における電子的制御/調整デバイス38を参照)に接続される。文字”a”は、一方では光送信器20’と光受信器20”との間の距離、他方では光送信器20’と加重レバー19との間の距離を表している。
【0011】
図5に依ると、各加重レバー19a、19b、19cには、夫々の光走査器20a、20b、20cが組み合わされる。光走査器20a、20bおよび20cは夫々のライン17a、17b、17cを介して、電子的評価手段として作用する制御/調整デバイス38(図6参照)に接続される。リード線17a、17b、17cは、電気パルスを伝達する。
【0012】
リード線17a、17b、17cは、光ファイバ・ケーブルの形態であってもよい。その場合、光パルスを電気パルスに変換する(不図示の)信号変換器を各光走査器20と開ループ/閉ループ制御器との間に配置する必要がある。
【0013】
図6に依ると、上記練篠フレームは牽伸システム3を備え、その上流には牽伸システム取入口21が配置されると共に下流には牽伸システム吐出口22が配置されている。取出しローラ15、16により引出された各スライバ7は、測定要素14を通過して搬送される。牽伸システム3はフォー・オーバー・スリー牽伸システムとして設計され、すなわち該システムは、3個の底部ローラI、II、III(Iは底部吐出ローラ、IIは中央底部ローラ、および、IIIは底部送給ローラ)と、4個の頂部ローラ23、24、25、26とから成る。数本のスライバ7a〜7fから成る繊維束7の牽伸作用は牽伸システム3において行われる。牽伸システムは、予備牽伸部および主要牽伸部から成る。ローラ対26/IIIおよび25/IIは予備牽伸領域を形成し、ローラ対25/IIおよび23、24/Iは主要牽伸領域を形成する。引出されたスライバ7は牽伸システム吐出口22におけるウェブ案内部材27に到達して、スライバ・ファネル30を通して吐出ローラ28、29により引出される。スライバ・ファネル30においてはスライバ7はスライバ7’へと集束され、該スライバは引き続きケンス42内へと布置される。歯付きベルトを介して機械的に結合された取出ローラ15、16、底部送給ローラIIIおよび中央底部ローラIIは、所望の値が予め設定され得る可変速度モータ31により駆動される(関係付けられた頂部ローラ26および25は共回転する)。底部吐出ローラIおよび吐出ローラ28、29は主要モータ32により駆動される。可変速度モータ31および主要モータ32の各々は自身の閉ループ・システム33、34を有する。制御(速度制御)は閉制御ループにより行われ、タコジェネレータ35が上記可変速度モータに組み合わされており、タコジェネレータ36が主要モータ32に組み合わされる。上記牽伸システムの吐出口22においては、出現するスライバ7’の質量に比例するたとえば断面積などの変数が、スライバ・ファネル30に組み合わされた吐出測定要素37から獲得される。たとえばマイクロプロセッサを備えたマイクロコンピュータである中央処理ユニット38(開ループ/閉ループ制御器)は、可変速度モータ31に対する所望の変数の設定をコントローラ33に伝達する。測定要素14の測定済み変数は、牽伸操作の間において上記中央処理ユニットに伝達される。可変速度モータ31のために処理された値は、測定要素14からの測定済み変数と、出現するスライバ7’の断面積に対する所望値とに基づいて、中央処理ユニット38にて決定される。吐出測定要素37の測定済み変数は、出現するスライバ7’を監視する役目を果たす(出力スライバ監視)。この制御システムを用いると、ケンス内に送給されるスライバ7の断面積の変動は、予備牽伸プロセスの対応した調整作用により補償され得ると共に、スライバ7’は均一化され得る。参照番号39は入力デバイスを表し、且つ、参照番号40はたとえば視覚的表示ユニットなどの表示手段を表す。17a、17b、17cは、図5に示された如く光走査器20a、20bおよび20cを処理ユニット38(評価ユニット)に夫々接続するリード線を表す。
【0014】
図6は、オートレベラの例を用いて記述された。非調整式の練篠フレームも包含される。
【0015】
(最大で8本である)スライバ7は、送給軸架6に取付けられた練篠フレームを通じてケンス5から該送給軸架上へと引出される。該ローラ軸架は主として、2個の支持体および1本のビームを備えて成る。送給ローラが支持バー18および圧力ロール9によってこのビーム上に取付けられている。送給ローラ8は、上記練篠フレームにより駆動される。スライバ案内部材43と、圧力ロール9を備えた支持バー18とが送給ローラに取付けられる。安定化させるために、スライバ7はまずスライバ案内部材43を通じて案内され、次いで上記練篠フレームに向けて被動送給ローラ8上を案内される。可動アーム19を介して支持バー18に接続された圧力ロール9が該スライバ7上に位置すると共にその比較的に大きい自重の故に圧力ロール9が該スライバ7を送給ローラ8上に押圧するときにのみ、スライバ7は送給ローラ8により搬送され得る。故にスライバ7は、送給ローラ8と圧力ロール9との間で一定度合いまで加圧される。圧力ロール9は回転可能に取付けられており、それにより、スライバ7は損傷を蒙ることなしに移動されるようになる。
【0016】
圧力ロール9と共に存在する支持バー18上に距離センサ、たとえば(選択的に光ファイバ・ケーブルと共に)光学的距離センサ20などを取付けることにより、圧力ロール9に対する距離測定を行って結果的にスライバの状態を検出することが可能である。その利点は、個々のスライバに対して、完全に機械的に離間された非接触式の監視が個別に行えることである。以下に記述される動作状態は、距離測定と上記機械の動作状態とを結び付けるプログラムから得られる。
【0017】
圧力ロールは存在する。
スライバは存在し、スライバは静止的であり、機械は停止している。
スライバは存在し、スライバは静止的であり、機械は運転されている。
スライバは存在し、スライバは運動しており、機械は停止している。
スライバは存在し、スライバは運動しており、機械は運転されている。
スライバは存在せず、機械は停止している。
スライバは存在せず、機械は運転されている。
【0018】
この評価のシーケンスは、以下の如く展開される。
光学的距離センサ20は圧力ロール9のアーム19上に測定点を有し、該アームはたとえば運動可能に取付けられている。最初の命令時(機械は停止している)に、圧力ロール9はスライバ7なしで送給ローラ8上に載置され、圧力ロール9に対する距離が測定されて制御ユニット38に記憶される。次に、機械は停止された状態で、スライバ7が圧力ロール9と送給ローラ8との間に載置され得る。スライバ7の太さにより距離センサ20と圧力ロール9との間の距離は減少されると共に制御ユニット38は定常的に存在する信号を検出する。この信号は初期始動時における値と比較されて、静止的に存在するスライバ7が検出される。スライバ7が存在すること又は交換されたスライバ7が認識されたことを確実にするために、存在するスライバ7によるこの測定は、上記機械が投入切換えされる前に自動的に常に行う必要がある。スライバ7の搬送(機械の運転)により、圧力ロール9は今や持続的に揺動され、その結果としての距離の変動が検出され、連続的に変化可能な信号が測定され、制御ユニット38はスライバ7が存在して運動していることを検出する。スライバ7が裂断した場合には、圧力ロール9は上記送給ローラ上のスライバ7なしで運転され、測定信号は始動時の上記信号と比較され、始動時における測定値が検出されると共に、それを関数”機械運転”と組み合わせることで、制御ユニット38は上記機械がスライバの存在なしで運転されていることを認識する。各信号を組み合わせることにより制御ユニット38が上記機械は”動作の準備ができていない”ことを検出したという前述した状態の全てにおいては、上記機械は動作不良であり、作動停止される。プログラム技術により上記機械の関数と組み合わされて評価されるこれらの種々の信号を測定することにより、正確で間接的な光学的距離測定に基づいて、ローラ取入口における個々のスライバの効率的な監視を行うことができる。スライバ較正の夫々の個別値は、(たとえばスライバ監視に関する統計値すなわち変化可能な測定パラメータなどを用いる)プログラミングにより更に処理され得る。好適には、8チャネルの評価ユニットが使用され得る。更に、制御工学方法により個々のスライバ監視を停止切換えし得ることが好ましい。
【図面の簡単な説明】
【0019】
【図1】本発明に係る装置を備えた練篠フレームの送給テーブルの概略図である。
【図2】図1に対応する平面図である。
【図3】送給ローラと光走査器を備えた頂部ローラとの間におけるスライバ案内部材によるスライバの進路変更を示す平面図である。
【図4】図3に対応する側面図である。
【図5】三対の送給ローラおよび頂部ローラを備えると共に夫々の光走査器が加重レバーに組み合わされた送給テーブルの側面図である。
【図6】練篠フレームに対する電子的な開ループ/閉ループ制御デバイスのブロック図である。
【符号の説明】
【0020】
1 入力領域
3 牽伸システム、練篠フレーム
4 スライバ巻取り領域
5a〜5f 紡績用ケンス
6 スライバ送給テーブル
7 スライバ
7a〜7f スライバ
8a〜8f 送給ローラ
9a〜9f 頂部ローラ
10 水平バー
11a〜11h 円筒体
12a、12b 張設用底部ローラ
13 張設用頂部ローラ
14 測定要素
15、16 搬送ローラ
17a、17b、17c リード線
18 支持バー
19a、19b、19c 加重レバー
20、20a、20b、20c 距離センサ、光走査器
20’ 光送信器
20” 光受信器
201 光線
202 光線
21 牽伸システム取入口
22 牽伸システム吐出口
23、24、25、26 頂部ローラ
27 ウェブ案内部材
28、29 吐出ローラ
30 ファネル
31 可変速度モータ
32 主要モータ
33 コントローラ
33、34 システム
35 タコジェネレータ
36 タコジェネレータ
37 吐出測定要素
38 処理ユニット
39 入力デバイス
40 表示手段
41 回転プレート
42 ケンス
43 スライバ案内部材
44 保持要素
I、II、III 底部ローラ
【特許請求の範囲】
【請求項1】
紡機の牽伸システムに対して送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動供給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置において、
各触覚要素(9;9a〜9f、19;19a、19b、19c)の位置を検出する非接触式距離センサ(20;20a〜20f)(距離測定センサ)が設けられており、これら非接触式距離センサ(20;20a〜20f)は電気的評価デバイス(38)に接続されることを特徴とする、装置。
【請求項2】
前記距離センサは、波または光線を用いて距離を測定するセンサであることを特徴とする、請求項1記載の装置。
【請求項3】
前記距離センサは光学的または音響的な距離測定センサであることを特徴とする、請求項1または2に記載の装置。
【請求項4】
超音波距離センサ(距離測定センサ)が使用されることを特徴とする、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
光線または音線が焦点合わせされることを特徴とする、請求項1乃至4のいずれか一項に記載の装置。
【請求項6】
前記距離センサは光走査器であることを特徴とする、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
前記距離センサは送信器および受信器から成ることを特徴とする、請求項1乃至6のいずれか一項に記載の装置。
【請求項8】
前記距離センサはレーザ走査器であることを特徴とする、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
前記距離センサは可視光線を使用することを特徴とする、請求項1乃至8のいずれか一項に記載の装置。
【請求項10】
前記距離センサは赤外光を使用することを特徴とする、請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
前記距離センサは前記触覚要素までの距離を決定することを特徴とする、請求項1乃至10のいずれか一項に記載の装置。
【請求項12】
前記距離センサは、前記触覚要素と組み合わされた対向要素までの距離を決定することを特徴とする、請求項1乃至11のいずれか一項に記載の装置。
【請求項13】
前記距離センサは固定され、前記対向要素は該距離センサに対して運動可能であることを特徴とする、請求項1乃至12のいずれか一項に記載の装置。
【請求項14】
前記距離センサは運動可能であり、前記対向要素は該距離センサに対して固定されることを特徴とする、請求項1乃至13のいずれか一項に記載の装置。
【請求項15】
前記対向要素は平坦な走査表面を有することを特徴とする、請求項1乃至14のいずれか一項に記載の装置。
【請求項16】
前記対向要素は円滑な走査表面を有することを特徴とする、請求項1乃至15のいずれか一項に記載の装置。
【請求項17】
前記対向要素は湾曲した走査表面を有することを特徴とする、請求項1乃至16のいずれか一項に記載の装置。
【請求項18】
前記走査表面は反射的であることを特徴とする、請求項1乃至17のいずれか一項に記載の装置。
【請求項19】
前記評価ユニットは開ループ/閉ループ制御デバイスに接続されることを特徴とする、請求項1乃至18のいずれか一項に記載の装置。
【請求項20】
前記距離センサはアナログ・センサであることを特徴とする、請求項1乃至19のいずれか一項に記載の装置。
【請求項21】
前記信号は測定点から評価ユニットまで光学的導波路を用いて導かれることを特徴とする、請求項1乃至20のいずれか一項に記載の装置。
【請求項22】
前記距離センサは可動触覚舌部の偏位を走査することを特徴とする、請求項1乃至21のいずれか一項に記載の装置。
【請求項23】
前記距離センサは可動触覚ローラの偏位を走査することを特徴とする、請求項1乃至22のいずれか一項に記載の装置。
【請求項24】
前記距離センサは前記触覚舌部または前記触覚ローラの偏位を直接的または間接的に走査することを特徴とする、請求項1乃至23のいずれか一項に記載の装置。
【請求項25】
当該装置はスライバの破断を確認して表示するために使用されることを特徴とする、請求項1乃至24のいずれか一項に記載の装置。
【請求項26】
当該装置はスライバの運動を確認または表示するために使用されることを特徴とする、請求項1乃至25のいずれか一項に記載の装置。
【請求項27】
前記距離センサは、長寸であって概ね撚り合わせられていない繊維束のパラメータを決定するために使用されることを特徴とする、請求項1乃至26のいずれか一項に記載の装置。
【請求項28】
前記距離センサは、連続的に移動する繊維束によるパラメータを測定するために使用されることを特徴とする、請求項1乃至27のいずれか一項に記載の装置。
【請求項29】
前記スライバ質量に対して決定された値は、前記繊維束が練篠されつつある紡績用前処理機の少なくとも一個の牽伸要素を制御することによって上記繊維束のスライバ質量変動を調節するために使用されることを特徴とする、請求項1乃至28のいずれか一項に記載の装置。
【請求項30】
前記触覚要素は固定された回動軸受上に取付けられることを特徴とする、請求項1乃至29のいずれか一項に記載の装置。
【請求項31】
前記触覚要素は回動可能取付けられたレバーであることを特徴とする、請求項1乃至30のいずれか一項に記載の装置。
【請求項32】
前記触覚要素は、たとえば平衡錘、スプリングなどの力付与要素と協働することを特徴とする、請求項1乃至31のいずれか一項に記載の装置。
【請求項33】
前記触覚要素は水平方向に可動であるべく取付けられることを特徴とする、請求項1乃至32のいずれか一項に記載の装置。
【請求項34】
前記触覚要素は一端にて弾性的に取付けられることを特徴とする、請求項1乃至33のいずれか一項に記載の装置。
【請求項35】
前記触覚要素は、たとえばレバーなどの保持部材上に取付けられることを特徴とする、請求項1乃至34のいずれか一項に記載の装置。
【請求項36】
前記触覚要素は鉛直軸心の回りで回動可能に取付けられることを特徴とする、請求項1乃至35のいずれか一項に記載の装置。
【請求項37】
可動的に取付けられた前記触覚要素は、たとえばスプリング、重り、自然弾性、負荷シリンダ、磁石などの機械的、電気的、油圧的または空気的な手段により付勢されると共に調節可能とされ得ることを特徴とする、請求項1乃至36のいずれか一項に記載の装置。
【請求項38】
複数個の距離センサが配備され、その各々は触覚要素によってスライバの太さを走査すること(個別スライバ走査)を特徴とする、請求項1乃至37のいずれか一項に記載の装置。
【請求項39】
前記スライバは、入力部分において紡績用ケンスから複数の被動送給ローラ上へと引出されて、被動牽伸システムへと搬送されることを特徴とする、請求項1乃至38のいずれか一項に記載の装置。
【請求項40】
前記送給ローラは固定されることを特徴とする、請求項1乃至39のいずれか一項に記載の装置。
【請求項41】
各送給ローラ上には運動可能(偏向可能)な共回転ローラが位置することを特徴とする、請求項1乃至40のいずれか一項に記載の装置。
【請求項42】
前記運動可能ローラは回転式レバーにより回転式軸受上に取付けられることを特徴とする、請求項1乃至41のいずれか一項に記載の装置。
【請求項43】
前記距離センサは前記運動可能ローラおよび/または少なくとも一本の回転式レバーの偏向を検出し得ることを特徴とする、請求項1乃至42のいずれか一項に記載の装置。
【請求項44】
前記距離センサと共に前記触覚要素は前記ケンスの出力部に配備されることを特徴とする、請求項1乃至43のいずれか一項に記載の装置。
【請求項45】
前記距離センサと共に前記触覚要素は前記ケンスからスライバを取出す配置機構の一部を形成することを特徴とする、請求項1乃至44のいずれか一項に記載の装置。
【請求項46】
前記共回転ローラ(圧点)は自身の重量下で前記送給ローラ上に位置することを特徴とする、請求項1乃至45のいずれか一項に記載の装置。
【請求項47】
前記評価デバイスは多重チャネル評価デバイスから成ることを特徴とする、請求項1乃至46のいずれか一項に記載の装置。
【請求項48】
各距離センサは個別に停止切換えされるべく配置されることを特徴とする、請求項1乃至47のいずれか一項に記載の装置。
【請求項49】
前記送給ローラと前記共回転ローラ(圧力ロール)との2つの円筒状周囲表面の間にはローラ・ニップが在ることを特徴とする、請求項1乃至48のいずれか一項に記載の装置。
【請求項50】
前記繊維束を搬送するときに前記圧力ロールは持続的に揺動することを特徴とする、請求項1乃至49のいずれか一項に記載の装置。
【請求項1】
紡機の牽伸システムに対して送給された複数本のスライバにおけるパラメータを検出する装置であって、特にスライバの移動および/または存在を検出し、上記パラメータは各スライバにおいて別個に測定可能であり、各スライバはスライバ用ケンスから夫々の被動供給ローラ上へと引出されると共に上記牽伸システムに送給されて触覚要素により機械的に検知され、該触覚要素の偏向は電気信号へと変換可能であると共に該触覚要素は自身に関係付けられたセンサ要素を有するという装置において、
各触覚要素(9;9a〜9f、19;19a、19b、19c)の位置を検出する非接触式距離センサ(20;20a〜20f)(距離測定センサ)が設けられており、これら非接触式距離センサ(20;20a〜20f)は電気的評価デバイス(38)に接続されることを特徴とする、装置。
【請求項2】
前記距離センサは、波または光線を用いて距離を測定するセンサであることを特徴とする、請求項1記載の装置。
【請求項3】
前記距離センサは光学的または音響的な距離測定センサであることを特徴とする、請求項1または2に記載の装置。
【請求項4】
超音波距離センサ(距離測定センサ)が使用されることを特徴とする、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
光線または音線が焦点合わせされることを特徴とする、請求項1乃至4のいずれか一項に記載の装置。
【請求項6】
前記距離センサは光走査器であることを特徴とする、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
前記距離センサは送信器および受信器から成ることを特徴とする、請求項1乃至6のいずれか一項に記載の装置。
【請求項8】
前記距離センサはレーザ走査器であることを特徴とする、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
前記距離センサは可視光線を使用することを特徴とする、請求項1乃至8のいずれか一項に記載の装置。
【請求項10】
前記距離センサは赤外光を使用することを特徴とする、請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
前記距離センサは前記触覚要素までの距離を決定することを特徴とする、請求項1乃至10のいずれか一項に記載の装置。
【請求項12】
前記距離センサは、前記触覚要素と組み合わされた対向要素までの距離を決定することを特徴とする、請求項1乃至11のいずれか一項に記載の装置。
【請求項13】
前記距離センサは固定され、前記対向要素は該距離センサに対して運動可能であることを特徴とする、請求項1乃至12のいずれか一項に記載の装置。
【請求項14】
前記距離センサは運動可能であり、前記対向要素は該距離センサに対して固定されることを特徴とする、請求項1乃至13のいずれか一項に記載の装置。
【請求項15】
前記対向要素は平坦な走査表面を有することを特徴とする、請求項1乃至14のいずれか一項に記載の装置。
【請求項16】
前記対向要素は円滑な走査表面を有することを特徴とする、請求項1乃至15のいずれか一項に記載の装置。
【請求項17】
前記対向要素は湾曲した走査表面を有することを特徴とする、請求項1乃至16のいずれか一項に記載の装置。
【請求項18】
前記走査表面は反射的であることを特徴とする、請求項1乃至17のいずれか一項に記載の装置。
【請求項19】
前記評価ユニットは開ループ/閉ループ制御デバイスに接続されることを特徴とする、請求項1乃至18のいずれか一項に記載の装置。
【請求項20】
前記距離センサはアナログ・センサであることを特徴とする、請求項1乃至19のいずれか一項に記載の装置。
【請求項21】
前記信号は測定点から評価ユニットまで光学的導波路を用いて導かれることを特徴とする、請求項1乃至20のいずれか一項に記載の装置。
【請求項22】
前記距離センサは可動触覚舌部の偏位を走査することを特徴とする、請求項1乃至21のいずれか一項に記載の装置。
【請求項23】
前記距離センサは可動触覚ローラの偏位を走査することを特徴とする、請求項1乃至22のいずれか一項に記載の装置。
【請求項24】
前記距離センサは前記触覚舌部または前記触覚ローラの偏位を直接的または間接的に走査することを特徴とする、請求項1乃至23のいずれか一項に記載の装置。
【請求項25】
当該装置はスライバの破断を確認して表示するために使用されることを特徴とする、請求項1乃至24のいずれか一項に記載の装置。
【請求項26】
当該装置はスライバの運動を確認または表示するために使用されることを特徴とする、請求項1乃至25のいずれか一項に記載の装置。
【請求項27】
前記距離センサは、長寸であって概ね撚り合わせられていない繊維束のパラメータを決定するために使用されることを特徴とする、請求項1乃至26のいずれか一項に記載の装置。
【請求項28】
前記距離センサは、連続的に移動する繊維束によるパラメータを測定するために使用されることを特徴とする、請求項1乃至27のいずれか一項に記載の装置。
【請求項29】
前記スライバ質量に対して決定された値は、前記繊維束が練篠されつつある紡績用前処理機の少なくとも一個の牽伸要素を制御することによって上記繊維束のスライバ質量変動を調節するために使用されることを特徴とする、請求項1乃至28のいずれか一項に記載の装置。
【請求項30】
前記触覚要素は固定された回動軸受上に取付けられることを特徴とする、請求項1乃至29のいずれか一項に記載の装置。
【請求項31】
前記触覚要素は回動可能取付けられたレバーであることを特徴とする、請求項1乃至30のいずれか一項に記載の装置。
【請求項32】
前記触覚要素は、たとえば平衡錘、スプリングなどの力付与要素と協働することを特徴とする、請求項1乃至31のいずれか一項に記載の装置。
【請求項33】
前記触覚要素は水平方向に可動であるべく取付けられることを特徴とする、請求項1乃至32のいずれか一項に記載の装置。
【請求項34】
前記触覚要素は一端にて弾性的に取付けられることを特徴とする、請求項1乃至33のいずれか一項に記載の装置。
【請求項35】
前記触覚要素は、たとえばレバーなどの保持部材上に取付けられることを特徴とする、請求項1乃至34のいずれか一項に記載の装置。
【請求項36】
前記触覚要素は鉛直軸心の回りで回動可能に取付けられることを特徴とする、請求項1乃至35のいずれか一項に記載の装置。
【請求項37】
可動的に取付けられた前記触覚要素は、たとえばスプリング、重り、自然弾性、負荷シリンダ、磁石などの機械的、電気的、油圧的または空気的な手段により付勢されると共に調節可能とされ得ることを特徴とする、請求項1乃至36のいずれか一項に記載の装置。
【請求項38】
複数個の距離センサが配備され、その各々は触覚要素によってスライバの太さを走査すること(個別スライバ走査)を特徴とする、請求項1乃至37のいずれか一項に記載の装置。
【請求項39】
前記スライバは、入力部分において紡績用ケンスから複数の被動送給ローラ上へと引出されて、被動牽伸システムへと搬送されることを特徴とする、請求項1乃至38のいずれか一項に記載の装置。
【請求項40】
前記送給ローラは固定されることを特徴とする、請求項1乃至39のいずれか一項に記載の装置。
【請求項41】
各送給ローラ上には運動可能(偏向可能)な共回転ローラが位置することを特徴とする、請求項1乃至40のいずれか一項に記載の装置。
【請求項42】
前記運動可能ローラは回転式レバーにより回転式軸受上に取付けられることを特徴とする、請求項1乃至41のいずれか一項に記載の装置。
【請求項43】
前記距離センサは前記運動可能ローラおよび/または少なくとも一本の回転式レバーの偏向を検出し得ることを特徴とする、請求項1乃至42のいずれか一項に記載の装置。
【請求項44】
前記距離センサと共に前記触覚要素は前記ケンスの出力部に配備されることを特徴とする、請求項1乃至43のいずれか一項に記載の装置。
【請求項45】
前記距離センサと共に前記触覚要素は前記ケンスからスライバを取出す配置機構の一部を形成することを特徴とする、請求項1乃至44のいずれか一項に記載の装置。
【請求項46】
前記共回転ローラ(圧点)は自身の重量下で前記送給ローラ上に位置することを特徴とする、請求項1乃至45のいずれか一項に記載の装置。
【請求項47】
前記評価デバイスは多重チャネル評価デバイスから成ることを特徴とする、請求項1乃至46のいずれか一項に記載の装置。
【請求項48】
各距離センサは個別に停止切換えされるべく配置されることを特徴とする、請求項1乃至47のいずれか一項に記載の装置。
【請求項49】
前記送給ローラと前記共回転ローラ(圧力ロール)との2つの円筒状周囲表面の間にはローラ・ニップが在ることを特徴とする、請求項1乃至48のいずれか一項に記載の装置。
【請求項50】
前記繊維束を搬送するときに前記圧力ロールは持続的に揺動することを特徴とする、請求項1乃至49のいずれか一項に記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2007−23472(P2007−23472A)
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願番号】特願2006−191854(P2006−191854)
【出願日】平成18年7月12日(2006.7.12)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願日】平成18年7月12日(2006.7.12)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]