
紡績機または撚糸機のスピンドル用糸クランプ装置
【課題】スピンドル回転による遠心作用で加重除去要素が糸クランプ装置内のクランプ要素を開口可能にする。
【解決手段】紡績機または撚糸機のスピンドル用糸クランプ装置8であって、それをスピンドル1に取り付けるための受容部と、糸をクランプするために相対して可動な2つのクランプ要素12,13と、該クランプ要素を荷重力で閉鎖させるための少なくとも1つの荷重要素17と、荷重力とは逆方向の荷重除去力を発生させるための少なくとも1つの荷重除去要素18とを備え、スピンドル1が回転するときの遠心作用で荷重除去要素18が糸クランプ装置8内で可動であり、荷重除去力によってクランプ要素12,13が開口可能である。1つの荷重除去要素18に対して少なくとも2つのポジションが糸クランプ装置8内に割り当てられており、定義可能なスピンドル回転数の時に荷重除去要素18によって異なる荷重除去力を発生可能である。
【解決手段】紡績機または撚糸機のスピンドル用糸クランプ装置8であって、それをスピンドル1に取り付けるための受容部と、糸をクランプするために相対して可動な2つのクランプ要素12,13と、該クランプ要素を荷重力で閉鎖させるための少なくとも1つの荷重要素17と、荷重力とは逆方向の荷重除去力を発生させるための少なくとも1つの荷重除去要素18とを備え、スピンドル1が回転するときの遠心作用で荷重除去要素18が糸クランプ装置8内で可動であり、荷重除去力によってクランプ要素12,13が開口可能である。1つの荷重除去要素18に対して少なくとも2つのポジションが糸クランプ装置8内に割り当てられており、定義可能なスピンドル回転数の時に荷重除去要素18によって異なる荷重除去力を発生可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、紡績機または撚糸機のスピンドル用糸クランプ装置であって、該糸クランプ装置を前記スピンドルに取り付けるための受容部と、糸をクランプするために相対して可動な2つのクランプ要素と、該クランプ要素を荷重力で閉鎖させるための少なくとも1つの荷重要素と、前記荷重力とは逆方向の荷重除去力を発生させるための少なくとも1つの荷重除去要素とを備え、前記スピンドルが回転するときの遠心作用で前記荷重除去要素が前記糸クランプ装置内で可動であり、前記荷重除去力によって前記クランプ要素が開口可能である前記糸クランプ装置に関するものである。
【背景技術】
【0002】
この種の糸クランプ装置は、特許文献1によって従来技術として知られている。この公知の糸クランプ装置の場合、糸のクランプを生じさせる荷重要素はばねによって形成される。糸クランプ装置内には、半径方向に可動で半シェル状のガイドで案内される球体の形態の複数個の荷重除去要素が配置されている。球体用のガイドは、球体の半径方向の運動の際に糸用のクランプ要素が開閉するように構成されている。作動状態でスピンドルが回転すると、球体はスピンドル回転数とともに増大する遠心力を受ける。球体によって発生する荷重除去力がばねの荷重力に対応するような限界回転数が存在する。この限界回転数を越えると、糸クランプ装置が開口する。スピンドルの制動の際に限界回転数を下回ると、球体の遠心力がばねの荷重力よりも小さくなり、その結果糸クランプ装置が閉鎖する。糸クランプ装置のクランプ要素の開閉は、同じ回転数で生じる。同様の糸クランプ装置は特許文献2からもすでに知られている。
【0003】
特許文献3からは、冒頭で述べた種類の糸クランプ装置であって、クランプ要素の開閉を異なるスピンドル回転数で行うようにしたものが知られている。スピンドルに着座しているコップの交換、いわゆるドッフィング過程は、スピンドル回転数が低いときに糸アンダーリールを行うことができ、且つ紡績機または撚糸機の再始動の後で可能な限り高いスピンドル回転数に至るまで糸がまだ糸クランプ装置内に固定されたままであれば、容易になる。これは特許文献3に記載の糸クランプ装置を用いて実現される。スピンドルの加速段階でのクランプ要素の開口は高回転数で行われ、これに対し、スピンドルの減速段階でのクランプ要素の閉鎖は低回転数で行われる。糸クランプ装置のこのような挙動は、荷重要素として磁石が設けられていることによって達成される。磁石はその引力によって可動なクランプ要素を荷重し、それによって糸がクランプされる。クランプ要素の間隔が大きくなるにつれて磁石の引力は強く減少するので、糸クランプ装置を開口させるには非常に高い荷重除去力が必要であり、すなわち高スピンドル回転数が必要である。
【0004】
磁石の引力はクランプスリットが大きくなるにつれて減少するので、クランプされる糸が太いほどクランプ力も減少する。しかしながら、太い糸こそ糸の破壊強さがより高いので、糸クランプ装置内での強いクランプ力が要求される。さらに、特に本例のように磁石が大きな磁力を有していなければならず、同時に振動に反応してはならない場合、磁石は高価な部品である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2007/131562A1号パンフレット
【特許文献2】独国特許出願公開第19628826A1号明細書
【特許文献3】国際公開第2007/065703A2号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、改良形の糸クランプ装置を提供することである。
【課題を解決するための手段】
【0007】
この課題は、1つの荷重除去要素に対して少なくとも2つの異なるポジションが糸クランプ装置内に割り当てられており、前記ポジションにおいて、定義可能なスピンドル回転数の時に荷重除去要素によって異なる荷重除去力を発生可能であることによって解決される。
【0008】
所定の、一定に保持されるスピンドル回転数において、荷重除去要素がどのポジションにあるかに応じて該荷重除去要素が異なる大きさの荷重除去力を行使することができることによって、第1のスピンドル回転数で開口し、第1のスピンドル回転数とは異なる第2のスピンドル回転数で閉鎖するような糸クランプ装置が提供される。可変な荷重除去力により、糸クランプ装置内に磁石は必要ない。少なくとも1つの荷重要素の荷重力は、クランプ要素の閉鎖状態よりもクランプ要素の開口状態においてより高くなる。これにより、比較的太い糸のクランプ力が比較的細い糸のクランプ力よりも大きいという利点を達成できる。したがって、コップ交換過程中に太い紡ぎ糸または撚り糸も糸クランプ装置内で確実に保持することができる。それにもかかわらず、すべての荷重要素を非常に安価な弾性要素によって形成することができる。
【0009】
有利な構成では、1つの荷重除去要素の第1のポジションに対してクランプ要素の閉鎖状態が割り当てられ、1つの荷重除去要素の第2のポジションに対してクランプ要素の開口状態が割り当てられ、第1のポジションにおいてクランプ要素が閉鎖しているときに荷重除去要素によって低荷重除去力を発生可能であり、第2のポジションにおいてクランプ要素が開口しているときに高荷重除去力を発生可能である。この対比処理は、スピンドルの所定の回転数を一定に保持して行う。この構成には、スピンドルの加速段階で高スピンドル回転数の時にはじめてクランプ要素が開口し、減速段階で低スピンドル回転数の時に再び閉鎖するという利点がある。糸クランプ装置の開閉は、荷重除去力と荷重力とが平衡状態にあるときに行われる。荷重除去要素が糸クランプ装置内で2つのポジションを占めることができ、これらポジションで異なる荷重除去力を発生させることにより、荷重除去力と荷重力とが平衡状態になる2つの限界回転数が存在する。有利には、スピンドルの上限回転数を越えたときに1つの荷重除去要素がクランプ要素を開口させるために第1のポジションから第2のポジションへ移動可能であり、上限回転数以下の下限回転数を下回ったときに1つの荷重除去要素がクランプ要素を閉鎖させるために第2のポジションから再び第1のポジションへ移動可能であるのがよい。逆にいえば、第1のポジションでは、予め定義されたスピンドル回転数で荷重除去要素によって低い荷重除去力しか発生できないので、荷重除去力が荷重力を解消させてクランプ要素を開口状態へもたらすために十分な大きさになるまでには、より高いスピンドル回転数が必要である。スピンドルの減速段階では、荷重除去要素は第2のポジションにあって、対応的に(同じ回転数で)より高い荷重除去力を発生させる。すなわち、下限回転数までは、クランプ要素が閉鎖することなくスピンドル回転数を低下させることができる。下限回転数を下回ってはじめて荷重除去力が荷重力を下回り、クランプ要素が閉鎖する。
【0010】
スピンドルの非平衡状態を回避するため、複数個の荷重除去要素を糸クランプ装置の周囲に配置するのが有利である。有利には、1つの荷重除去要素が実質的に半径方向に可動な遠心体によって形成される。遠心体は有利には球体によって形成される。
【0011】
本発明の他の構成では、1つの遠心体に少なくとも2つの当接面が付設されているのが有利である。第1の当接面は遠心体の第1のポジションに割り当てられ、第2の当接面は遠心体の第2のポジションに割り当てられている。有利には、これらの当接面は、糸クランプ装置をスピンドルに取り付けるための受容部の中心線に対する当該当接面の間隔によって定義される異なる半径上にある。遠心体が第1のポジションから半径方向へ第2のポジションへ移動し、その際クランプ要素を開口させるので、第1のポジションに割り当てられる当接面は第2のポジションに割り当てられる当接面よりもより小さな半径上にあるのが有利である。
【0012】
本発明の他の構成では、1つの遠心体と1つの当接面との間の接触点に接する接線は、(糸クランプ装置の軸断面で見て)受容部の中心線に対し角度を有し、小さな半径上にある1つの当接面に接線があり、この接線は受容部の中心線に対し小さな角度を有し、大きな半径上にある1つの当接面に接線があり、この接線は受容部の中心線に対し大きな角度を有している。接線と中心線との成す角度は、荷重除去要素の遠心力が同じである場合の荷重除去力の大きさを特定する。この構成により、定義可能なスピンドル回転数で荷重除去要素によって異なる荷重除去力を発生可能であるような、非常に簡潔な糸クランプ装置を提供できる。遠心体の質量との整合の点では、当接面の幾何学的形態により上限回転数と下限回転数とを非常に簡単に必要条件に適合させることができる。高価な磁石は設けずに済む。磁石を糸クランプ装置内に取り付けるための付加的な取り付けステップも省略できる。したがって、本発明による糸クランプ装置は部品数が多くとも少コストで製造できる。
【0013】
接触点に接する接線が中心線と交わっているならば有利である。特に有利なのは、接線が受容部の軸断面内にあることである。これにより、遠心体によって発生した遠心力の、荷重力とは逆方向の荷重除去力への特に優れた変換が行われる。前記小さな角度は0゜と20゜の間にあり、特に有利には5゜ないし10゜の範囲内にある。前記大きな角度は有利には60゜と80゜の間であり、特に有利には60゜ないし75゜の範囲内にある。
【0014】
他の構成では、小さな半径上にある1つの当接面が、(軸断面で見て)受容部の中心線と小さな角度を成す領域を有しているのが有利である。大きな半径上にある当接面が、(軸断面で見て)受容部の中心線と大きな角度を成す領域を有する。軸断面にて直線状に延在している当接面の領域は特に簡単に製造することができる。また、遠心力によって発生する荷重除去力は直線状に延在している当接面の領域にわたって実質的に一定であり、その結果上限回転数および下限回転数に対する製造公差の影響を少なくさせることができる。一部の領域において直線状に延在している当接面の場合、該当接面と中心線との間の角度は、中心線と当接面に対する遠心体の接触点に接している接線との間の角度に正確に対応している。
【0015】
半径方向における遠心体の摩擦のない運動を保証するため、小さな半径上にある1つの当接面とより大きな半径上にある1つの当接面との間に当接面があり、該当接面と受容部の中心線との成す角度は半径が増すにつれて連続的に増大するのが有利である。
【0016】
1つの遠心体のための1つの当接面が遠心作用によって変形可能な糸クランプ装置の構成要素に配置されているのが有利である。遠心体と遠心作用によって変形可能な構成要素とは接触点を有し、この接触点に接線が接することができる。この構成には、受容部の中心線に対する接線の角度がスピンドルの加速段階中に変化するという利点がある。スピンドル回転数が低ければ、中心線に対する接線の角度は非常に小さく、その結果補助的な前記構成要素によって、クランプ要素が開口するような高い上限回転数を達成可能である。この場合、遠心作用によって変形可能な構成要素は有利にはリングによって形成されている。リングの中心は有利には受容部の中心線上にある。リングは有利にはゴム弾性材から成っていることができる。リングは、有利には、クランプ要素の閉鎖時に遠心体の運動を阻害しないように配置されている。
【0017】
本発明の他の利点および構成は、いくつかの実施形態に関わる以下の説明から明らかである。
【図面の簡単な説明】
【0018】
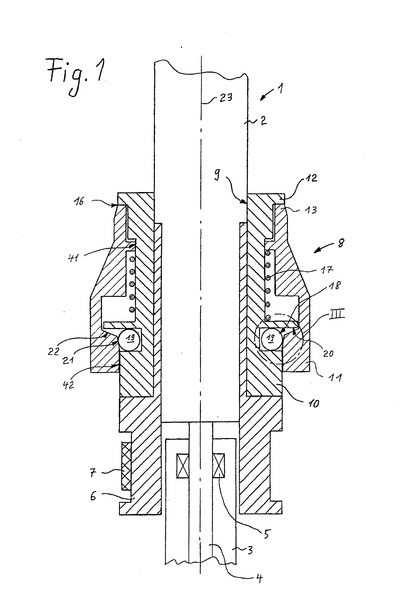
【図1】糸クランプ装置が閉鎖しているときのスピンドルを拡大して示した部分軸断面図である。
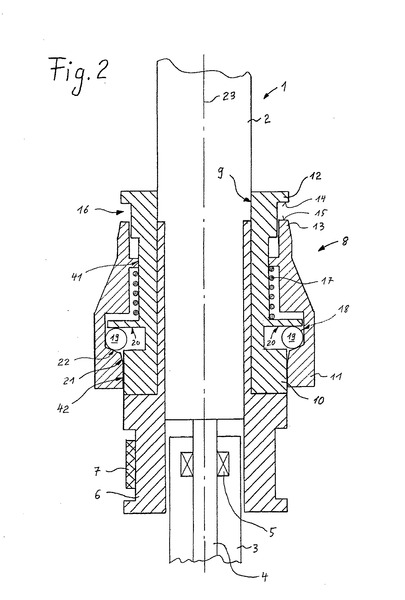
【図2】図1の同じスピンドルを糸クランプ装置が開口しているときに示した図である。
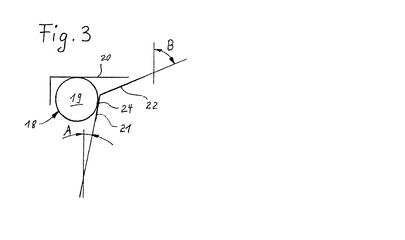
【図3】図1のIIIで示した領域の拡大図である。
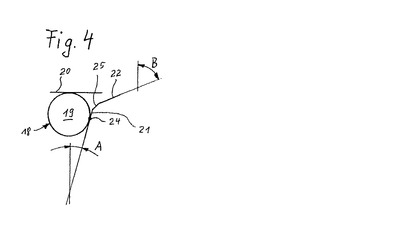
【図4】他の構成の糸クランプ装置における図3と同様の図である。
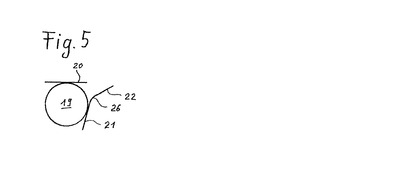
【図5】他の構成の糸クランプ装置における図3と同様の図である。
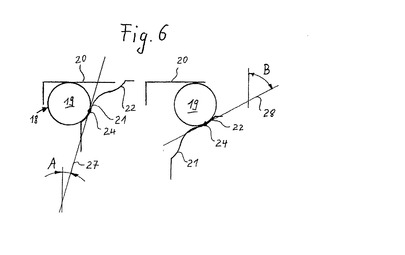
【図6】他の構成の糸クランプ装置における図3と同様の図である。
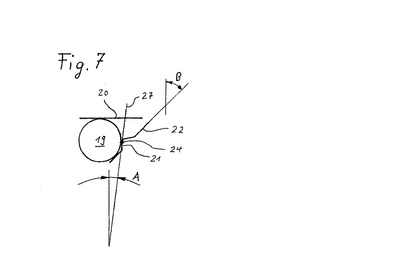
【図7】他の構成の糸クランプ装置における図3と同様の図である。
【図8】他の構成の糸クランプ装置における図3と同様の図である。
【図9】糸クランプ装置の変形実施形態を図3と同様に示した図である。
【図10】図9の断面X−Xに沿って切断した図である。
【発明を実施するための形態】
【0019】
図1には、紡績機または撚糸機のスピンドル1が図示されている。スピンドル1は、回転する上部部分2と、図示していないスピンドルレールに位置固定されている回転しない軸受箱3とから成っている。上部部分2は一緒に回転するシャフト4を有し、シャフト4は軸受箱3内でネックベアリング5と図示していないフットベアリングとで支持されている。上部部分2はワーブ6を含んでおり、該ワーブ6を介して上部部分2をベルト7により駆動可能である。
【0020】
ワーブ6の上方には糸クランプ装置8が配置されている。糸クランプ装置8は受容部9を用いてスピンドル上部部分2に装着されている。糸クランプ装置8は、故障時に容易に交換可能にするため、有利には上部部分2に取り外し可能に固定されている。上部部分2は糸クランプ装置8の上方に図示していないボビンケースを受容することができ、生成した糸をこのボビンケースに巻きつけてボビンを形成させる。巻きつけ工程は、機内に互いに並設された多数のスピンドル1にわたって延在する上下動可能なリングレールを用いて公知の態様で行う。各スピンドル1には、同様に図示していないスピニングリングが付設され、スピニングリング上では公知の態様で回転体が回転する。回転体は作動時に糸に回転を付与し、糸をボビンへ案内する。
【0021】
糸クランプ装置8は、スピンドル1のための受容部9を含んでいるスリーブ状の本体10から成っている。本体10上には、軸線方向に変位可能なスリーブ11が配置されている。本体10とスリーブ11にはそれぞれクランプ要素12と13が配置されている。クランプ要素12と13は、糸をクランプするためのスリット16を形成することができるクランプ面14と15を含んでいる。クランプされる糸は「アンダーリール糸」とも呼ばれる。クランプ要素12と13の間で開口しているスリット16は図2に認められる。糸クランプ装置8はばねの形態の荷重要素17を含んでいる。荷重要素17はスリーブ11に設けたクランプ要素13を本体10に設けたクランプ要素12に対し押圧させる荷重力を生じさせ、その結果クランプ面14と15の間でアンダーリール糸をクランプすることができる。
【0022】
クランプ要素12と13の開閉時のスリーブ11の運動は、2つのガイド41と42によって保証される。スリーブ11が本体10上で正確に案内されるように、第1のガイド41がクランプ要素13の領域に配置されている。第2のガイド42は第1のガイド41から可能な限り離して間隔を持って配置されている。ガイド41とガイド42は、軸断面で見て荷重要素17と荷重除去要素18とが両ガイド41,42の間にあるように配置されている。糸クランプ装置8における望ましくないアンバランス状態を最小限に抑えるため、ばね17は本体10によって案内され、調心されている。
【0023】
糸クランプ装置8は、さらに、荷重力とは逆方向の荷重除去力を発生させるために複数個の荷重除去要素18を含んでいる。図1と図2には2つの荷重除去要素18が図示されている。もちろん、糸クランプ装置8の周囲に均等により多くの荷重除去要素18を配分させて配置してもよい。荷重除去要素18は、実質的に半径方向に可動な、球体の形態の遠心体19によって形成される。球体は好ましくは鋼から成る。
【0024】
図1に図示した、クランプ要素12,13が閉じている状態では、荷重除去要素18は第1のポジションにある。遠心体19は本体10に設けたガイド20で案内されている。遠心体19には第1の当接面21が付設されている。当接面21はスリーブ11に配置されている。スピンドル1が回転している時の遠心力作用で球体19は当接面21に当接する。当接面21は受容部9の中心線23と小さな角度Aを成している。角度Aにより、球体19は中心線23の軸線方向においてばね17の荷重力とは逆方向の力をスリーブ11に対し発生させる。スピンドル回転数が上限回転数を越えると、球体19による荷重除去力がばね17の荷重力を上回り、その結果スリーブ11がワーブ6の方向へ移動する。スリーブ11の移動によってクランプ要素12,13が開く。同時に、球体19はガイド20内で半径方向外側へより大きな半径上の第2のポジションへ移動する。
【0025】
クランプ要素12,13が開いているときの糸クランプ装置8の状態は図2に認められる。遠心体19は第2のポジションにあり、クランプ面14と15の間にあるスリット16は開いている。このポジションでは、遠心体19に対し、スリーブ11に設けた第2の当接面22が付設され、当接面22は受容部9の中心線23に対し角度Bを有している。角度Bは角度Aよりも大きい。この第2のポジションでは、球体と回転軸線23との間隔が幾分より大きいために、与えられたスピンドル回転数で球体19によって生じる遠心力が幾分より大きくなっている点は別として、スリーブ11に対する球体19の荷重除去力は角度Bがより大きいために第1のポジションでよりも著しく大きくなっている。いま、スピンドル回転数が再び減少すると、糸クランプ装置8が開いていたときの上限回転数を下回っても糸クランプ装置8はまだ再閉鎖しない。下限回転数を下回ったときにはじめて、荷重除去力がばね17の荷重力を下回ってスリーブ11がばね17によって再び上方へ押される程度に、荷重除去力が減少する。荷重要素17はクランプ要素12,13を閉鎖させ、球体19は再び第1のポジション(図1を参照)へ移動する。
【0026】
図3は荷重除去要素18としての球体19の周囲領域をもう一度示したもので、その拡大図である。この図から認められるように、球体19は本体10のガイド20とスリーブ11の当接面21とに当接している。中心線23に対する当接面21の角度Aにより、遠心体19と当接面21との間の接触点24に、クランプ力とは逆方向の荷重除去力が生じる。当接面21は軸断面において直線状に延在する領域を有している。したがって、当接面21の角度Aは接触点24において球体19に接している接線の角度に等しい。糸クランプ装置が開いたときに球体19が当接する第2の当接面22は、第1の当接面21よりもより大きな半径上にある。第2の当接面22は中心線23に対する大きな角度Bを有している。角度Bは角度Aよりも著しく大きい。この角度差によって、スピンドル回転数が高ければ糸クランプ装置8が開き、スピンドル回転数が著しく低くなったときにはじめて糸クランプ装置8が再閉鎖することが達成される。
【0027】
わかりやすくするため、本発明による糸クランプ装置8を備えたスピンドル1の作動時の経過をもう一度経時的に説明する。たとえば20000回転/分の作動回転数による紡績過程または撚糸過程の間、糸クランプ装置8は開口している。スリット16は開いている。糸は、スピンドル1の上部部分2にあるスリーブに巻きつけられる。満管ボビンまたは満管コップを空スリーブと交換するコップ交換過程の前に、リングレールをそのリングとともに、糸がスリット16内に入るような位置へ走行させる。このいわゆる糸のアンダーリール過程でスピンドル1の回転数を減少させる。スピンドル回転数が下限値を下回ると、糸クランプ装置8が閉じてアンダーリール糸がクランプ要素12と13の間でクランプされる。次にスピンドルを停止させ、満管コップを上部部分2から上方へ抜きとる。満管コップを抜き取る際、延伸装置または送出装置から来る糸端は糸クランプ装置8でクランプされたままであり、糸はコップと糸クランプ装置8との間で分断される。空スリーブを上部部分2の上へ載置した後、機械を再び始動させる。スピンドル1が加速している間にリングレールはすでに再び第1のポジションへ持ち上げられ、その結果糸は上部部分2の上に着座しているスリーブに巻きつけられる。スピンドル回転数が上限値を越えると、糸クランプ装置8が再び開いて、スリット16でクランプされていた糸端が投げ出される。コップ交換過程中の確実で信頼性のある作動を保証するため、下限回転数は非常に低いのが有利であり、たとえばほぼ1000ないし2000回転/分のオーダーであるのが有利である。アンダーリール糸をスリット16に挿入させる際には、糸を確実にクランプすることができるように糸が確実にスリット16内にあることが重要であるが、他方、あとで糸端がクランプ要素12と13から再び容易に離れるようにするため、糸が糸クランプ装置の本体10に360゜以上巻きついていてはならない。スピンドル回転数が可能な限り低ければ、スリット16内へのアンダーリール糸の挿入をより正確に、より簡単に実現することができる。それ故、可能な限り低い下限回転数で糸クランプ装置8が閉鎖することが重要である。これとは逆に、スピンドルの加速段階では、糸クランプ装置8が再び開口するときの上限回転数が可能な限り高いスピンドル回転数にあるのが、たとえば10000回転/分のオーダーにあるのが非常に有利である。これにより、クランプ要素12と13の間でクランプされるアンダーリール糸の端部は、空スリーブに巻き糸が十分に巻き取られるまでの間、糸クランプ装置8で確実に保持される。したがって、コップ交換時の誤作動および糸切れをかなり減少させることができる。
【0028】
糸クランプ装置8をさらに最適化するため、当接面21と22の構成を変形させることができる。図4ないし図8にはいくつかの有利な変形実施形態が図示されている。
【0029】
図4の変形実施形態では、当接面21と当接面22との間に、中心線23に対する角度が角度Aと角度Bとの間にある領域25がある。当接面25により、当接面21から当接面22への球体19の移行状態が改善される。球体19の案内のさらなる改善は、小さな半径上にある当接面21と大きな半径上にある当接面22との間に、中心線23と成す角度が半径が大きくなるにつれて大きくなっている当接面26があるならば、達成される。このような丸みを帯びた当接面26を図5に図示した。
【0030】
図6には、すでに当接面21と当接面22とが湾曲している有利な変形実施形態が図示されている。これによって、球体19の特に穏やかな移行状態を達成できる。図6の左部分には、糸クランプ装置が閉鎖している時の球体19のポジションが図示されている。図6の右部分は、糸クランプ装置8が開口しているときの球体19を示している。当接面21が湾曲している場合、球体19によって発生する荷重除去力にとって重要なのは、接触点24に接している接線27と、その中心線23に対する角度Aである。仮に、糸クランプ装置8が開口しているときに球体19が当接面22上にあるとすれば、球体19と当接面22との間の接触点における接線28の角度Bも重要である。
【0031】
当接面21と22は図3ないし図5では直線状に延在する領域を有しているので、そこでは接線27と28は当接面21,22の表面と重なっている。角度Aは有利には5゜と10゜の間の範囲であり、特に有利にはほぼ6゜である。角度Bは有利には60゜と75゜の間の範囲であり、特にほぼ65゜である。
【0032】
図7には、当接面21がわずかに隆起した隆起部を有する変形実施形態が図示されている。これにより、接触点24での接線27は中心線23に対し非常に小さな角度Aを有している。これによって、糸クランプ装置を開口させるために比較的高い上限回転数を達成できる。
【0033】
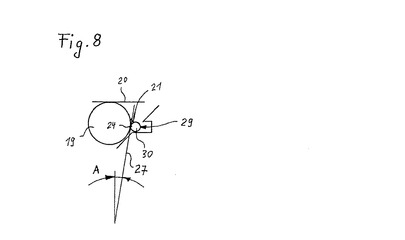
図8では、糸クランプ装置8のスリーブ11は、遠心作用によって変形可能な構成要素29を含んでいる。糸クランプ装置8が閉鎖しているときに遠心体19が当接する当接面21は、この変形可能な構成要素29に配置されている。接触点24で接している接線27はここでも中心線23に対し小さな角度Aを有している。変形可能な構成要素29は有利にはリング30によって形成されている。リング30の中心は受容部の中心線23上にある。リング30はゴム弾性材から成っている。リング30を設けたことにより、糸クランプ装置8は高い上限回転数の時にはじめて開口する。スピンドル回転数は、リング30が遠心作用によって拡大し、それによって球体19がそのポジションを変化できるほど高くなければならない。スピンドル1の減速段階では、変形可能な構成要素29は第2のポジションから第1のポジションへ移動する球体19の障害にはならない。しかも、図8の実施形態では、リング30を適宜配置することにより、接線27の角度Aを負の値へ小さくさせることができ、その結果加速段階の開始時点で遠心体19はクランプ要素12,13のクランプ力を増大させ、それによって糸クランプ装置8のクランプ作用が特に太い糸の場合にいっそう改善される。スピンドル回転数が増大してリング30の拡大が増すと、球体19がリング30を最終的に越えるまで角度Aは常に大きくなる。
【0034】
図1ないし図8に図示した実施形態の場合、スリット16を開閉させるためにスリーブ11がそのスラスト運動の際に実施するストロークは、球体19の直径よりも小さい。スリーブ11のより大きなストロークが望ましい場合、或いは、より小さな球体19を使用する必要がある場合には、糸クランプ装置8の本体10に設けた球体19のガイド20の特別な適合が有利である。
【0035】
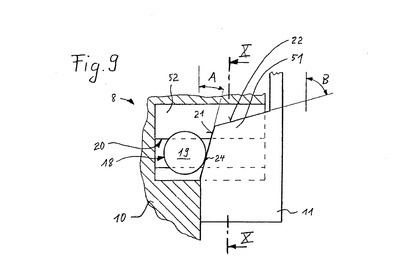
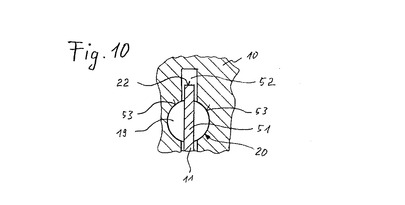
図9と図10には、スリーブ11のストロークが球体19の直径よりも大きな糸クランプ装置8の構成が図示されている。図1ないし図8の実施形態の場合と同様に、スリーブ11には2つの当接面21と22が設けられ、これらの当接面はスピンドル1の中心線23に対し異なる角度AとBを有している。当接面21と22は半径方向内側へ突出している細条部51に配置されている。細条部51は本体10の繰り抜き部52内へ突出している。細条部51は球体19が中央で支持されるように配置されている。球体19のために本体10に設けたガイド20は、球体19が2つのセグメント状のガイド面53によって案内されて、半径方向にて図示の第1のポジションから図2の図示と同様の第2のポジションへ移動できるように、形成されている。ガイド面53は筒体の周面の一部分から形成される。図10にはっきり認められるように、ガイド20と当接面21,22とは球体中心に関し対称に配置されている。これによって球体19は非常に正確に案内され、その結果球体はその半径方向運動時に固着しない。
【0036】
もちろん、図9および図10の実施形態に、図3ないし図8に図示した当接面21,22の構成を使用することもできる。
【符号の説明】
【0037】
1 スピンドル
8 糸クランプ装置
9 受容部
12,13 クランプ要素
17 荷重要素
18 荷重除去要素
19 遠心体
21,22,26 当接面
23 受容部の中心線
24 接触点
27,28 接線
29 変形可能な構成要素
30 リング
A 接線と受容部の中心線とが成す小さな角度
B 接線と受容部の中心線とが成す大きな角度
【技術分野】
【0001】
本発明は、紡績機または撚糸機のスピンドル用糸クランプ装置であって、該糸クランプ装置を前記スピンドルに取り付けるための受容部と、糸をクランプするために相対して可動な2つのクランプ要素と、該クランプ要素を荷重力で閉鎖させるための少なくとも1つの荷重要素と、前記荷重力とは逆方向の荷重除去力を発生させるための少なくとも1つの荷重除去要素とを備え、前記スピンドルが回転するときの遠心作用で前記荷重除去要素が前記糸クランプ装置内で可動であり、前記荷重除去力によって前記クランプ要素が開口可能である前記糸クランプ装置に関するものである。
【背景技術】
【0002】
この種の糸クランプ装置は、特許文献1によって従来技術として知られている。この公知の糸クランプ装置の場合、糸のクランプを生じさせる荷重要素はばねによって形成される。糸クランプ装置内には、半径方向に可動で半シェル状のガイドで案内される球体の形態の複数個の荷重除去要素が配置されている。球体用のガイドは、球体の半径方向の運動の際に糸用のクランプ要素が開閉するように構成されている。作動状態でスピンドルが回転すると、球体はスピンドル回転数とともに増大する遠心力を受ける。球体によって発生する荷重除去力がばねの荷重力に対応するような限界回転数が存在する。この限界回転数を越えると、糸クランプ装置が開口する。スピンドルの制動の際に限界回転数を下回ると、球体の遠心力がばねの荷重力よりも小さくなり、その結果糸クランプ装置が閉鎖する。糸クランプ装置のクランプ要素の開閉は、同じ回転数で生じる。同様の糸クランプ装置は特許文献2からもすでに知られている。
【0003】
特許文献3からは、冒頭で述べた種類の糸クランプ装置であって、クランプ要素の開閉を異なるスピンドル回転数で行うようにしたものが知られている。スピンドルに着座しているコップの交換、いわゆるドッフィング過程は、スピンドル回転数が低いときに糸アンダーリールを行うことができ、且つ紡績機または撚糸機の再始動の後で可能な限り高いスピンドル回転数に至るまで糸がまだ糸クランプ装置内に固定されたままであれば、容易になる。これは特許文献3に記載の糸クランプ装置を用いて実現される。スピンドルの加速段階でのクランプ要素の開口は高回転数で行われ、これに対し、スピンドルの減速段階でのクランプ要素の閉鎖は低回転数で行われる。糸クランプ装置のこのような挙動は、荷重要素として磁石が設けられていることによって達成される。磁石はその引力によって可動なクランプ要素を荷重し、それによって糸がクランプされる。クランプ要素の間隔が大きくなるにつれて磁石の引力は強く減少するので、糸クランプ装置を開口させるには非常に高い荷重除去力が必要であり、すなわち高スピンドル回転数が必要である。
【0004】
磁石の引力はクランプスリットが大きくなるにつれて減少するので、クランプされる糸が太いほどクランプ力も減少する。しかしながら、太い糸こそ糸の破壊強さがより高いので、糸クランプ装置内での強いクランプ力が要求される。さらに、特に本例のように磁石が大きな磁力を有していなければならず、同時に振動に反応してはならない場合、磁石は高価な部品である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2007/131562A1号パンフレット
【特許文献2】独国特許出願公開第19628826A1号明細書
【特許文献3】国際公開第2007/065703A2号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は、改良形の糸クランプ装置を提供することである。
【課題を解決するための手段】
【0007】
この課題は、1つの荷重除去要素に対して少なくとも2つの異なるポジションが糸クランプ装置内に割り当てられており、前記ポジションにおいて、定義可能なスピンドル回転数の時に荷重除去要素によって異なる荷重除去力を発生可能であることによって解決される。
【0008】
所定の、一定に保持されるスピンドル回転数において、荷重除去要素がどのポジションにあるかに応じて該荷重除去要素が異なる大きさの荷重除去力を行使することができることによって、第1のスピンドル回転数で開口し、第1のスピンドル回転数とは異なる第2のスピンドル回転数で閉鎖するような糸クランプ装置が提供される。可変な荷重除去力により、糸クランプ装置内に磁石は必要ない。少なくとも1つの荷重要素の荷重力は、クランプ要素の閉鎖状態よりもクランプ要素の開口状態においてより高くなる。これにより、比較的太い糸のクランプ力が比較的細い糸のクランプ力よりも大きいという利点を達成できる。したがって、コップ交換過程中に太い紡ぎ糸または撚り糸も糸クランプ装置内で確実に保持することができる。それにもかかわらず、すべての荷重要素を非常に安価な弾性要素によって形成することができる。
【0009】
有利な構成では、1つの荷重除去要素の第1のポジションに対してクランプ要素の閉鎖状態が割り当てられ、1つの荷重除去要素の第2のポジションに対してクランプ要素の開口状態が割り当てられ、第1のポジションにおいてクランプ要素が閉鎖しているときに荷重除去要素によって低荷重除去力を発生可能であり、第2のポジションにおいてクランプ要素が開口しているときに高荷重除去力を発生可能である。この対比処理は、スピンドルの所定の回転数を一定に保持して行う。この構成には、スピンドルの加速段階で高スピンドル回転数の時にはじめてクランプ要素が開口し、減速段階で低スピンドル回転数の時に再び閉鎖するという利点がある。糸クランプ装置の開閉は、荷重除去力と荷重力とが平衡状態にあるときに行われる。荷重除去要素が糸クランプ装置内で2つのポジションを占めることができ、これらポジションで異なる荷重除去力を発生させることにより、荷重除去力と荷重力とが平衡状態になる2つの限界回転数が存在する。有利には、スピンドルの上限回転数を越えたときに1つの荷重除去要素がクランプ要素を開口させるために第1のポジションから第2のポジションへ移動可能であり、上限回転数以下の下限回転数を下回ったときに1つの荷重除去要素がクランプ要素を閉鎖させるために第2のポジションから再び第1のポジションへ移動可能であるのがよい。逆にいえば、第1のポジションでは、予め定義されたスピンドル回転数で荷重除去要素によって低い荷重除去力しか発生できないので、荷重除去力が荷重力を解消させてクランプ要素を開口状態へもたらすために十分な大きさになるまでには、より高いスピンドル回転数が必要である。スピンドルの減速段階では、荷重除去要素は第2のポジションにあって、対応的に(同じ回転数で)より高い荷重除去力を発生させる。すなわち、下限回転数までは、クランプ要素が閉鎖することなくスピンドル回転数を低下させることができる。下限回転数を下回ってはじめて荷重除去力が荷重力を下回り、クランプ要素が閉鎖する。
【0010】
スピンドルの非平衡状態を回避するため、複数個の荷重除去要素を糸クランプ装置の周囲に配置するのが有利である。有利には、1つの荷重除去要素が実質的に半径方向に可動な遠心体によって形成される。遠心体は有利には球体によって形成される。
【0011】
本発明の他の構成では、1つの遠心体に少なくとも2つの当接面が付設されているのが有利である。第1の当接面は遠心体の第1のポジションに割り当てられ、第2の当接面は遠心体の第2のポジションに割り当てられている。有利には、これらの当接面は、糸クランプ装置をスピンドルに取り付けるための受容部の中心線に対する当該当接面の間隔によって定義される異なる半径上にある。遠心体が第1のポジションから半径方向へ第2のポジションへ移動し、その際クランプ要素を開口させるので、第1のポジションに割り当てられる当接面は第2のポジションに割り当てられる当接面よりもより小さな半径上にあるのが有利である。
【0012】
本発明の他の構成では、1つの遠心体と1つの当接面との間の接触点に接する接線は、(糸クランプ装置の軸断面で見て)受容部の中心線に対し角度を有し、小さな半径上にある1つの当接面に接線があり、この接線は受容部の中心線に対し小さな角度を有し、大きな半径上にある1つの当接面に接線があり、この接線は受容部の中心線に対し大きな角度を有している。接線と中心線との成す角度は、荷重除去要素の遠心力が同じである場合の荷重除去力の大きさを特定する。この構成により、定義可能なスピンドル回転数で荷重除去要素によって異なる荷重除去力を発生可能であるような、非常に簡潔な糸クランプ装置を提供できる。遠心体の質量との整合の点では、当接面の幾何学的形態により上限回転数と下限回転数とを非常に簡単に必要条件に適合させることができる。高価な磁石は設けずに済む。磁石を糸クランプ装置内に取り付けるための付加的な取り付けステップも省略できる。したがって、本発明による糸クランプ装置は部品数が多くとも少コストで製造できる。
【0013】
接触点に接する接線が中心線と交わっているならば有利である。特に有利なのは、接線が受容部の軸断面内にあることである。これにより、遠心体によって発生した遠心力の、荷重力とは逆方向の荷重除去力への特に優れた変換が行われる。前記小さな角度は0゜と20゜の間にあり、特に有利には5゜ないし10゜の範囲内にある。前記大きな角度は有利には60゜と80゜の間であり、特に有利には60゜ないし75゜の範囲内にある。
【0014】
他の構成では、小さな半径上にある1つの当接面が、(軸断面で見て)受容部の中心線と小さな角度を成す領域を有しているのが有利である。大きな半径上にある当接面が、(軸断面で見て)受容部の中心線と大きな角度を成す領域を有する。軸断面にて直線状に延在している当接面の領域は特に簡単に製造することができる。また、遠心力によって発生する荷重除去力は直線状に延在している当接面の領域にわたって実質的に一定であり、その結果上限回転数および下限回転数に対する製造公差の影響を少なくさせることができる。一部の領域において直線状に延在している当接面の場合、該当接面と中心線との間の角度は、中心線と当接面に対する遠心体の接触点に接している接線との間の角度に正確に対応している。
【0015】
半径方向における遠心体の摩擦のない運動を保証するため、小さな半径上にある1つの当接面とより大きな半径上にある1つの当接面との間に当接面があり、該当接面と受容部の中心線との成す角度は半径が増すにつれて連続的に増大するのが有利である。
【0016】
1つの遠心体のための1つの当接面が遠心作用によって変形可能な糸クランプ装置の構成要素に配置されているのが有利である。遠心体と遠心作用によって変形可能な構成要素とは接触点を有し、この接触点に接線が接することができる。この構成には、受容部の中心線に対する接線の角度がスピンドルの加速段階中に変化するという利点がある。スピンドル回転数が低ければ、中心線に対する接線の角度は非常に小さく、その結果補助的な前記構成要素によって、クランプ要素が開口するような高い上限回転数を達成可能である。この場合、遠心作用によって変形可能な構成要素は有利にはリングによって形成されている。リングの中心は有利には受容部の中心線上にある。リングは有利にはゴム弾性材から成っていることができる。リングは、有利には、クランプ要素の閉鎖時に遠心体の運動を阻害しないように配置されている。
【0017】
本発明の他の利点および構成は、いくつかの実施形態に関わる以下の説明から明らかである。
【図面の簡単な説明】
【0018】
【図1】糸クランプ装置が閉鎖しているときのスピンドルを拡大して示した部分軸断面図である。
【図2】図1の同じスピンドルを糸クランプ装置が開口しているときに示した図である。
【図3】図1のIIIで示した領域の拡大図である。
【図4】他の構成の糸クランプ装置における図3と同様の図である。
【図5】他の構成の糸クランプ装置における図3と同様の図である。
【図6】他の構成の糸クランプ装置における図3と同様の図である。
【図7】他の構成の糸クランプ装置における図3と同様の図である。
【図8】他の構成の糸クランプ装置における図3と同様の図である。
【図9】糸クランプ装置の変形実施形態を図3と同様に示した図である。
【図10】図9の断面X−Xに沿って切断した図である。
【発明を実施するための形態】
【0019】
図1には、紡績機または撚糸機のスピンドル1が図示されている。スピンドル1は、回転する上部部分2と、図示していないスピンドルレールに位置固定されている回転しない軸受箱3とから成っている。上部部分2は一緒に回転するシャフト4を有し、シャフト4は軸受箱3内でネックベアリング5と図示していないフットベアリングとで支持されている。上部部分2はワーブ6を含んでおり、該ワーブ6を介して上部部分2をベルト7により駆動可能である。
【0020】
ワーブ6の上方には糸クランプ装置8が配置されている。糸クランプ装置8は受容部9を用いてスピンドル上部部分2に装着されている。糸クランプ装置8は、故障時に容易に交換可能にするため、有利には上部部分2に取り外し可能に固定されている。上部部分2は糸クランプ装置8の上方に図示していないボビンケースを受容することができ、生成した糸をこのボビンケースに巻きつけてボビンを形成させる。巻きつけ工程は、機内に互いに並設された多数のスピンドル1にわたって延在する上下動可能なリングレールを用いて公知の態様で行う。各スピンドル1には、同様に図示していないスピニングリングが付設され、スピニングリング上では公知の態様で回転体が回転する。回転体は作動時に糸に回転を付与し、糸をボビンへ案内する。
【0021】
糸クランプ装置8は、スピンドル1のための受容部9を含んでいるスリーブ状の本体10から成っている。本体10上には、軸線方向に変位可能なスリーブ11が配置されている。本体10とスリーブ11にはそれぞれクランプ要素12と13が配置されている。クランプ要素12と13は、糸をクランプするためのスリット16を形成することができるクランプ面14と15を含んでいる。クランプされる糸は「アンダーリール糸」とも呼ばれる。クランプ要素12と13の間で開口しているスリット16は図2に認められる。糸クランプ装置8はばねの形態の荷重要素17を含んでいる。荷重要素17はスリーブ11に設けたクランプ要素13を本体10に設けたクランプ要素12に対し押圧させる荷重力を生じさせ、その結果クランプ面14と15の間でアンダーリール糸をクランプすることができる。
【0022】
クランプ要素12と13の開閉時のスリーブ11の運動は、2つのガイド41と42によって保証される。スリーブ11が本体10上で正確に案内されるように、第1のガイド41がクランプ要素13の領域に配置されている。第2のガイド42は第1のガイド41から可能な限り離して間隔を持って配置されている。ガイド41とガイド42は、軸断面で見て荷重要素17と荷重除去要素18とが両ガイド41,42の間にあるように配置されている。糸クランプ装置8における望ましくないアンバランス状態を最小限に抑えるため、ばね17は本体10によって案内され、調心されている。
【0023】
糸クランプ装置8は、さらに、荷重力とは逆方向の荷重除去力を発生させるために複数個の荷重除去要素18を含んでいる。図1と図2には2つの荷重除去要素18が図示されている。もちろん、糸クランプ装置8の周囲に均等により多くの荷重除去要素18を配分させて配置してもよい。荷重除去要素18は、実質的に半径方向に可動な、球体の形態の遠心体19によって形成される。球体は好ましくは鋼から成る。
【0024】
図1に図示した、クランプ要素12,13が閉じている状態では、荷重除去要素18は第1のポジションにある。遠心体19は本体10に設けたガイド20で案内されている。遠心体19には第1の当接面21が付設されている。当接面21はスリーブ11に配置されている。スピンドル1が回転している時の遠心力作用で球体19は当接面21に当接する。当接面21は受容部9の中心線23と小さな角度Aを成している。角度Aにより、球体19は中心線23の軸線方向においてばね17の荷重力とは逆方向の力をスリーブ11に対し発生させる。スピンドル回転数が上限回転数を越えると、球体19による荷重除去力がばね17の荷重力を上回り、その結果スリーブ11がワーブ6の方向へ移動する。スリーブ11の移動によってクランプ要素12,13が開く。同時に、球体19はガイド20内で半径方向外側へより大きな半径上の第2のポジションへ移動する。
【0025】
クランプ要素12,13が開いているときの糸クランプ装置8の状態は図2に認められる。遠心体19は第2のポジションにあり、クランプ面14と15の間にあるスリット16は開いている。このポジションでは、遠心体19に対し、スリーブ11に設けた第2の当接面22が付設され、当接面22は受容部9の中心線23に対し角度Bを有している。角度Bは角度Aよりも大きい。この第2のポジションでは、球体と回転軸線23との間隔が幾分より大きいために、与えられたスピンドル回転数で球体19によって生じる遠心力が幾分より大きくなっている点は別として、スリーブ11に対する球体19の荷重除去力は角度Bがより大きいために第1のポジションでよりも著しく大きくなっている。いま、スピンドル回転数が再び減少すると、糸クランプ装置8が開いていたときの上限回転数を下回っても糸クランプ装置8はまだ再閉鎖しない。下限回転数を下回ったときにはじめて、荷重除去力がばね17の荷重力を下回ってスリーブ11がばね17によって再び上方へ押される程度に、荷重除去力が減少する。荷重要素17はクランプ要素12,13を閉鎖させ、球体19は再び第1のポジション(図1を参照)へ移動する。
【0026】
図3は荷重除去要素18としての球体19の周囲領域をもう一度示したもので、その拡大図である。この図から認められるように、球体19は本体10のガイド20とスリーブ11の当接面21とに当接している。中心線23に対する当接面21の角度Aにより、遠心体19と当接面21との間の接触点24に、クランプ力とは逆方向の荷重除去力が生じる。当接面21は軸断面において直線状に延在する領域を有している。したがって、当接面21の角度Aは接触点24において球体19に接している接線の角度に等しい。糸クランプ装置が開いたときに球体19が当接する第2の当接面22は、第1の当接面21よりもより大きな半径上にある。第2の当接面22は中心線23に対する大きな角度Bを有している。角度Bは角度Aよりも著しく大きい。この角度差によって、スピンドル回転数が高ければ糸クランプ装置8が開き、スピンドル回転数が著しく低くなったときにはじめて糸クランプ装置8が再閉鎖することが達成される。
【0027】
わかりやすくするため、本発明による糸クランプ装置8を備えたスピンドル1の作動時の経過をもう一度経時的に説明する。たとえば20000回転/分の作動回転数による紡績過程または撚糸過程の間、糸クランプ装置8は開口している。スリット16は開いている。糸は、スピンドル1の上部部分2にあるスリーブに巻きつけられる。満管ボビンまたは満管コップを空スリーブと交換するコップ交換過程の前に、リングレールをそのリングとともに、糸がスリット16内に入るような位置へ走行させる。このいわゆる糸のアンダーリール過程でスピンドル1の回転数を減少させる。スピンドル回転数が下限値を下回ると、糸クランプ装置8が閉じてアンダーリール糸がクランプ要素12と13の間でクランプされる。次にスピンドルを停止させ、満管コップを上部部分2から上方へ抜きとる。満管コップを抜き取る際、延伸装置または送出装置から来る糸端は糸クランプ装置8でクランプされたままであり、糸はコップと糸クランプ装置8との間で分断される。空スリーブを上部部分2の上へ載置した後、機械を再び始動させる。スピンドル1が加速している間にリングレールはすでに再び第1のポジションへ持ち上げられ、その結果糸は上部部分2の上に着座しているスリーブに巻きつけられる。スピンドル回転数が上限値を越えると、糸クランプ装置8が再び開いて、スリット16でクランプされていた糸端が投げ出される。コップ交換過程中の確実で信頼性のある作動を保証するため、下限回転数は非常に低いのが有利であり、たとえばほぼ1000ないし2000回転/分のオーダーであるのが有利である。アンダーリール糸をスリット16に挿入させる際には、糸を確実にクランプすることができるように糸が確実にスリット16内にあることが重要であるが、他方、あとで糸端がクランプ要素12と13から再び容易に離れるようにするため、糸が糸クランプ装置の本体10に360゜以上巻きついていてはならない。スピンドル回転数が可能な限り低ければ、スリット16内へのアンダーリール糸の挿入をより正確に、より簡単に実現することができる。それ故、可能な限り低い下限回転数で糸クランプ装置8が閉鎖することが重要である。これとは逆に、スピンドルの加速段階では、糸クランプ装置8が再び開口するときの上限回転数が可能な限り高いスピンドル回転数にあるのが、たとえば10000回転/分のオーダーにあるのが非常に有利である。これにより、クランプ要素12と13の間でクランプされるアンダーリール糸の端部は、空スリーブに巻き糸が十分に巻き取られるまでの間、糸クランプ装置8で確実に保持される。したがって、コップ交換時の誤作動および糸切れをかなり減少させることができる。
【0028】
糸クランプ装置8をさらに最適化するため、当接面21と22の構成を変形させることができる。図4ないし図8にはいくつかの有利な変形実施形態が図示されている。
【0029】
図4の変形実施形態では、当接面21と当接面22との間に、中心線23に対する角度が角度Aと角度Bとの間にある領域25がある。当接面25により、当接面21から当接面22への球体19の移行状態が改善される。球体19の案内のさらなる改善は、小さな半径上にある当接面21と大きな半径上にある当接面22との間に、中心線23と成す角度が半径が大きくなるにつれて大きくなっている当接面26があるならば、達成される。このような丸みを帯びた当接面26を図5に図示した。
【0030】
図6には、すでに当接面21と当接面22とが湾曲している有利な変形実施形態が図示されている。これによって、球体19の特に穏やかな移行状態を達成できる。図6の左部分には、糸クランプ装置が閉鎖している時の球体19のポジションが図示されている。図6の右部分は、糸クランプ装置8が開口しているときの球体19を示している。当接面21が湾曲している場合、球体19によって発生する荷重除去力にとって重要なのは、接触点24に接している接線27と、その中心線23に対する角度Aである。仮に、糸クランプ装置8が開口しているときに球体19が当接面22上にあるとすれば、球体19と当接面22との間の接触点における接線28の角度Bも重要である。
【0031】
当接面21と22は図3ないし図5では直線状に延在する領域を有しているので、そこでは接線27と28は当接面21,22の表面と重なっている。角度Aは有利には5゜と10゜の間の範囲であり、特に有利にはほぼ6゜である。角度Bは有利には60゜と75゜の間の範囲であり、特にほぼ65゜である。
【0032】
図7には、当接面21がわずかに隆起した隆起部を有する変形実施形態が図示されている。これにより、接触点24での接線27は中心線23に対し非常に小さな角度Aを有している。これによって、糸クランプ装置を開口させるために比較的高い上限回転数を達成できる。
【0033】
図8では、糸クランプ装置8のスリーブ11は、遠心作用によって変形可能な構成要素29を含んでいる。糸クランプ装置8が閉鎖しているときに遠心体19が当接する当接面21は、この変形可能な構成要素29に配置されている。接触点24で接している接線27はここでも中心線23に対し小さな角度Aを有している。変形可能な構成要素29は有利にはリング30によって形成されている。リング30の中心は受容部の中心線23上にある。リング30はゴム弾性材から成っている。リング30を設けたことにより、糸クランプ装置8は高い上限回転数の時にはじめて開口する。スピンドル回転数は、リング30が遠心作用によって拡大し、それによって球体19がそのポジションを変化できるほど高くなければならない。スピンドル1の減速段階では、変形可能な構成要素29は第2のポジションから第1のポジションへ移動する球体19の障害にはならない。しかも、図8の実施形態では、リング30を適宜配置することにより、接線27の角度Aを負の値へ小さくさせることができ、その結果加速段階の開始時点で遠心体19はクランプ要素12,13のクランプ力を増大させ、それによって糸クランプ装置8のクランプ作用が特に太い糸の場合にいっそう改善される。スピンドル回転数が増大してリング30の拡大が増すと、球体19がリング30を最終的に越えるまで角度Aは常に大きくなる。
【0034】
図1ないし図8に図示した実施形態の場合、スリット16を開閉させるためにスリーブ11がそのスラスト運動の際に実施するストロークは、球体19の直径よりも小さい。スリーブ11のより大きなストロークが望ましい場合、或いは、より小さな球体19を使用する必要がある場合には、糸クランプ装置8の本体10に設けた球体19のガイド20の特別な適合が有利である。
【0035】
図9と図10には、スリーブ11のストロークが球体19の直径よりも大きな糸クランプ装置8の構成が図示されている。図1ないし図8の実施形態の場合と同様に、スリーブ11には2つの当接面21と22が設けられ、これらの当接面はスピンドル1の中心線23に対し異なる角度AとBを有している。当接面21と22は半径方向内側へ突出している細条部51に配置されている。細条部51は本体10の繰り抜き部52内へ突出している。細条部51は球体19が中央で支持されるように配置されている。球体19のために本体10に設けたガイド20は、球体19が2つのセグメント状のガイド面53によって案内されて、半径方向にて図示の第1のポジションから図2の図示と同様の第2のポジションへ移動できるように、形成されている。ガイド面53は筒体の周面の一部分から形成される。図10にはっきり認められるように、ガイド20と当接面21,22とは球体中心に関し対称に配置されている。これによって球体19は非常に正確に案内され、その結果球体はその半径方向運動時に固着しない。
【0036】
もちろん、図9および図10の実施形態に、図3ないし図8に図示した当接面21,22の構成を使用することもできる。
【符号の説明】
【0037】
1 スピンドル
8 糸クランプ装置
9 受容部
12,13 クランプ要素
17 荷重要素
18 荷重除去要素
19 遠心体
21,22,26 当接面
23 受容部の中心線
24 接触点
27,28 接線
29 変形可能な構成要素
30 リング
A 接線と受容部の中心線とが成す小さな角度
B 接線と受容部の中心線とが成す大きな角度
【特許請求の範囲】
【請求項1】
紡績機または撚糸機のスピンドル用糸クランプ装置であって、該糸クランプ装置を前記スピンドルに取り付けるための受容部と、糸をクランプするために相対して可動な2つのクランプ要素と、該クランプ要素を荷重力で閉鎖させるための少なくとも1つの荷重要素と、前記荷重力とは逆方向の荷重除去力を発生させるための少なくとも1つの荷重除去要素とを備え、前記スピンドルが回転するときの遠心作用で前記荷重除去要素が前記糸クランプ装置内で可動であり、前記荷重除去力によって前記クランプ要素が開口可能である前記糸クランプ装置において、1つの荷重除去要素(18)に対して少なくとも2つのポジションが前記糸クランプ装置(8)内に割り当てられており、前記ポジションにおいて、定義可能なスピンドル回転数の時に前記荷重除去要素(18)によって異なる荷重除去力を発生可能であることを特徴とする糸クランプ装置。
【請求項2】
1つの荷重除去要素(18)の第1のポジションに対して前記クランプ要素(12,13)の閉鎖状態が割り当てられ、1つの荷重除去要素(18)の第2のポジションに対して前記クランプ要素(12,13)の開口状態が割り当てられ、前記第1のポジションにおいて前記クランプ要素(12,13)が閉鎖しているときに前記荷重除去要素(18)によって低荷重除去力を発生可能であり、前記第2のポジションにおいて前記クランプ要素(12,13)が開口しているときに高荷重除去力を発生可能であることを特徴とする、請求項1に記載の糸クランプ装置。
【請求項3】
前記クランプ要素(12,13)の前記開口状態での前記少なくとも1つの荷重要素(17)の前記荷重力が前記クランプ要素(12,13)の前記閉鎖状態での前記荷重力よりも高いことを特徴とする、請求項1または2に記載の糸クランプ装置。
【請求項4】
すべての荷重要素(17)が弾性要素によって形成されることを特徴とする、請求項3に記載の糸クランプ装置。
【請求項5】
前記スピンドル(1)の上限回転数を越えたときに1つの荷重除去要素(18)が前記クランプ要素(12,13)を開口させるために前記第1のポジションから前記第2のポジションへ移動可能であり、前記上限回転数以下の下限回転数を下回ったときに1つの荷重除去要素(18)が前記クランプ要素(12,13)を閉鎖させるために前記第2のポジションから前記第1のポジションへ移動可能であることを特徴とする、請求項1から4までのいずれか一つに記載の糸クランプ装置。
【請求項6】
複数個の荷重除去要素(18)が前記糸クランプ装置(8)の周囲に配置されていることを特徴とする、請求項1から5までのいずれか一つに記載の糸クランプ装置。
【請求項7】
1つの荷重除去要素(18)が実質的に半径方向に可動な遠心体(19)によって形成されることを特徴とする、請求項1から6までのいずれか一つに記載の糸クランプ装置。
【請求項8】
1つの遠心体が球体(19)によって形成されることを特徴とする、請求項7に記載の糸クランプ装置。
【請求項9】
1つの遠心体(19)に少なくとも2つの当接面(21,22)が付設されていることを特徴とする、請求項7または8に記載の糸クランプ装置。
【請求項10】
前記当接面(21,22)が、前記糸クランプ装置(8)を前記スピンドル(1)に取り付けるための前記受容部(9)の中心線(23)に対する当該当接面(21;22)の間隔によって形成される異なる半径上にあることを特徴とする、請求項9に記載の糸クランプ装置。
【請求項11】
1つの遠心体(19)と1つの当接面(21;22)との間の接触点(24)に接する接線(27;28)が、(前記糸クランプ装置(8)の軸断面で見て)前記受容部(9)の前記中心線(23)に対し角度(A;B)を有していること、より小さな半径上にある1つの当接面(21)に接線(27)があり、この接線(27)が前記受容部(9)の前記中心線(23)に対し小さな角度(A)を有していること、より大きな半径上にある1つの当接面(22)に接線(28)があり、この接線(28)が前記受容部(9)の前記中心線(23)に対し大きな角度(B)を有していることを特徴とする、請求項10に記載の糸クランプ装置。
【請求項12】
より小さな半径上にある1つの当接面(21)が、軸断面で見て前記受容部の前記中心線(23)と小さな角度(A)を成す領域を有していることを特徴とする、請求項10または11に記載の糸クランプ装置。
【請求項13】
より大きな半径上にある1つの当接面(22)が、軸断面で見て前記受容部(9)の前記中心線(23)と大きな角度(B)を成す領域を有していることを特徴とする、請求項10から12までのいずれか一つに記載の糸クランプ装置。
【請求項14】
より小さな半径上にある1つの当接面(21)とより大きな半径上にある1つの当接面(22)との間に当接面(26)があり、該当接面(26)と前記受容部(9)の前記中心線(23)との成す角度は半径が増すにつれて連続的に増大することを特徴とする、請求項10から13までのいずれか一つに記載の糸クランプ装置。
【請求項15】
1つの遠心体(19)のための1つの当接面(21)が遠心作用によって変形可能な前記糸クランプ装置(8)の構成要素(29)に配置されていることを特徴とする、請求項9から14までのいずれか一つに記載の糸クランプ装置。
【請求項16】
遠心作用によって変形可能な前記構成要素(29)がリング(30)によって形成されることを特徴とする、請求項15に記載の糸クランプ装置。
【請求項17】
前記リング(30)がゴム弾性材から成ることを特徴とする、請求項16に記載の糸クランプ装置。
【請求項1】
紡績機または撚糸機のスピンドル用糸クランプ装置であって、該糸クランプ装置を前記スピンドルに取り付けるための受容部と、糸をクランプするために相対して可動な2つのクランプ要素と、該クランプ要素を荷重力で閉鎖させるための少なくとも1つの荷重要素と、前記荷重力とは逆方向の荷重除去力を発生させるための少なくとも1つの荷重除去要素とを備え、前記スピンドルが回転するときの遠心作用で前記荷重除去要素が前記糸クランプ装置内で可動であり、前記荷重除去力によって前記クランプ要素が開口可能である前記糸クランプ装置において、1つの荷重除去要素(18)に対して少なくとも2つのポジションが前記糸クランプ装置(8)内に割り当てられており、前記ポジションにおいて、定義可能なスピンドル回転数の時に前記荷重除去要素(18)によって異なる荷重除去力を発生可能であることを特徴とする糸クランプ装置。
【請求項2】
1つの荷重除去要素(18)の第1のポジションに対して前記クランプ要素(12,13)の閉鎖状態が割り当てられ、1つの荷重除去要素(18)の第2のポジションに対して前記クランプ要素(12,13)の開口状態が割り当てられ、前記第1のポジションにおいて前記クランプ要素(12,13)が閉鎖しているときに前記荷重除去要素(18)によって低荷重除去力を発生可能であり、前記第2のポジションにおいて前記クランプ要素(12,13)が開口しているときに高荷重除去力を発生可能であることを特徴とする、請求項1に記載の糸クランプ装置。
【請求項3】
前記クランプ要素(12,13)の前記開口状態での前記少なくとも1つの荷重要素(17)の前記荷重力が前記クランプ要素(12,13)の前記閉鎖状態での前記荷重力よりも高いことを特徴とする、請求項1または2に記載の糸クランプ装置。
【請求項4】
すべての荷重要素(17)が弾性要素によって形成されることを特徴とする、請求項3に記載の糸クランプ装置。
【請求項5】
前記スピンドル(1)の上限回転数を越えたときに1つの荷重除去要素(18)が前記クランプ要素(12,13)を開口させるために前記第1のポジションから前記第2のポジションへ移動可能であり、前記上限回転数以下の下限回転数を下回ったときに1つの荷重除去要素(18)が前記クランプ要素(12,13)を閉鎖させるために前記第2のポジションから前記第1のポジションへ移動可能であることを特徴とする、請求項1から4までのいずれか一つに記載の糸クランプ装置。
【請求項6】
複数個の荷重除去要素(18)が前記糸クランプ装置(8)の周囲に配置されていることを特徴とする、請求項1から5までのいずれか一つに記載の糸クランプ装置。
【請求項7】
1つの荷重除去要素(18)が実質的に半径方向に可動な遠心体(19)によって形成されることを特徴とする、請求項1から6までのいずれか一つに記載の糸クランプ装置。
【請求項8】
1つの遠心体が球体(19)によって形成されることを特徴とする、請求項7に記載の糸クランプ装置。
【請求項9】
1つの遠心体(19)に少なくとも2つの当接面(21,22)が付設されていることを特徴とする、請求項7または8に記載の糸クランプ装置。
【請求項10】
前記当接面(21,22)が、前記糸クランプ装置(8)を前記スピンドル(1)に取り付けるための前記受容部(9)の中心線(23)に対する当該当接面(21;22)の間隔によって形成される異なる半径上にあることを特徴とする、請求項9に記載の糸クランプ装置。
【請求項11】
1つの遠心体(19)と1つの当接面(21;22)との間の接触点(24)に接する接線(27;28)が、(前記糸クランプ装置(8)の軸断面で見て)前記受容部(9)の前記中心線(23)に対し角度(A;B)を有していること、より小さな半径上にある1つの当接面(21)に接線(27)があり、この接線(27)が前記受容部(9)の前記中心線(23)に対し小さな角度(A)を有していること、より大きな半径上にある1つの当接面(22)に接線(28)があり、この接線(28)が前記受容部(9)の前記中心線(23)に対し大きな角度(B)を有していることを特徴とする、請求項10に記載の糸クランプ装置。
【請求項12】
より小さな半径上にある1つの当接面(21)が、軸断面で見て前記受容部の前記中心線(23)と小さな角度(A)を成す領域を有していることを特徴とする、請求項10または11に記載の糸クランプ装置。
【請求項13】
より大きな半径上にある1つの当接面(22)が、軸断面で見て前記受容部(9)の前記中心線(23)と大きな角度(B)を成す領域を有していることを特徴とする、請求項10から12までのいずれか一つに記載の糸クランプ装置。
【請求項14】
より小さな半径上にある1つの当接面(21)とより大きな半径上にある1つの当接面(22)との間に当接面(26)があり、該当接面(26)と前記受容部(9)の前記中心線(23)との成す角度は半径が増すにつれて連続的に増大することを特徴とする、請求項10から13までのいずれか一つに記載の糸クランプ装置。
【請求項15】
1つの遠心体(19)のための1つの当接面(21)が遠心作用によって変形可能な前記糸クランプ装置(8)の構成要素(29)に配置されていることを特徴とする、請求項9から14までのいずれか一つに記載の糸クランプ装置。
【請求項16】
遠心作用によって変形可能な前記構成要素(29)がリング(30)によって形成されることを特徴とする、請求項15に記載の糸クランプ装置。
【請求項17】
前記リング(30)がゴム弾性材から成ることを特徴とする、請求項16に記載の糸クランプ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−270430(P2010−270430A)
【公開日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願番号】特願2010−114891(P2010−114891)
【出願日】平成22年5月19日(2010.5.19)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
【公開日】平成22年12月2日(2010.12.2)
【国際特許分類】
【出願日】平成22年5月19日(2010.5.19)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
[ Back to top ]