
紡績機械用の練条機
【課題】本発明は練篠機に関し、重合スライバのドラフトをさらに改善することを目的とする。
【解決手段】紡績機械用の練条機、特に綿、化学繊維などのための自動調節練条機で、それぞれ固有の電動機14で駆動されるローラを備えた相前後する少なくとも2つのローラ対10, 11を有し、前記電動機が接続された電子制御調節装置が設けられている。重合スライバのドラフトをさらに改善 するために、第1の電動機によって駆動される1つ以上のローラにはフリーホイール13が付属しており、別の電動機17によって駆動される1つ以上のローラには増分型回転変位センサ18が付属している。
【解決手段】紡績機械用の練条機、特に綿、化学繊維などのための自動調節練条機で、それぞれ固有の電動機14で駆動されるローラを備えた相前後する少なくとも2つのローラ対10, 11を有し、前記電動機が接続された電子制御調節装置が設けられている。重合スライバのドラフトをさらに改善 するために、第1の電動機によって駆動される1つ以上のローラにはフリーホイール13が付属しており、別の電動機17によって駆動される1つ以上のローラには増分型回転変位センサ18が付属している。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は紡績機械用の練条機、特に綿、化学繊維のための自動調節練条機に関する。
【背景技術】
【0002】
それぞれ固有の電動機で駆動されるローラを備えた相前後する少なくとも2つのローラ対と、前記電動機が接続された電子制御調節装置とを有する、紡績機械用の練条機、特に綿、化学繊維などのための自動調節練条機は公知である。
【発明の開示】
【発明が解決しようとする課題】
【0003】
公知の練条機では、駆動されるローラに正常運転時の回転方向と反対に回転するのを妨げるそれぞれ1つのフリーホイールが付属している。この装置は、実用において機能することが実証された。電動機は(たとえ少しでも)不均一に逆回転することが起こり得る。ブレークドラフト用の電動機がメインドラフト用の電動機よりもやや強く逆回転すると、重合スライバにドラフト不良が発生することがある。
【0004】
本発明の課題は、上記の短所を回避して、特に重合スライバのドラフトをさらに改善する、冒頭に記載した種類の練条機を提供することである。
【課題を解決するための手段】
【0005】
上記課題を解決するために本発明の練条機は、第1の電動機によって駆動される1つ以上のローラにはフリーホイールが付属しており、別の電動機によって駆動される1つ以上のローラには増分型回転変位センサが付属しているようにした。
【0006】
練条機の入口にフリーホイールが付属し、出口に増分型回転変位センサが付属していることによって、電動機の可能な逆回転は互いに解離されている。別の電動機によって駆動されるローラ(練条機の出口)には増分型回転変位センサは付属しており、そうすることによってこのローラの回転の微調が可能である。フリーホイールが第1の電動機および付属する1つ以上のローラ(練条機の入口)の逆回転を妨げる一方、増分型回転変位センサの信号により別の電動機(練条機の出口)を通して電子逆転防止を実現できる。増分型回転変位センサはローラの回転数または回転量および回転方向の微細な変化を有利な仕方で検知できるので、相応に逆方向に制御したり反応したりできる。これにより、1つには出口で逆回転を妨げることができる。逆回転が少なければ、静止状態におけるローラの位置を正確に(つまり回転方向のほかに逆回転の量も)検知できるので、この位置から練条機は再び始動できる。上記の方策により、重合スライバのドラフトが改善される。
【0007】
前記第1の電動機が調節モータであり、前記別の電動機がメインモータであることが好都合である。前記第2の電動機の回転数は、加工されるべき重合スライバの不均一性を補償するために調節される。ブレークドラフト区域とメインドラフト区域とを有する練条機で、ブレークドラフト区域の駆動にはフリーホイールが付属し、メインドラフト区域の駆動には増分型回転変位センサが付属していることが好ましい。前記フリーホイールがスプラグ型フリーホイールであることが有利である。前記フリーホイールが前記ローラと共軸に配置されていることが得策である。前記フリーホイールが前記ローラと軸平行に配置されていることが好都合である。前記第1の電動機と駆動される少なくとも1つの前記ローラとの間に共通伝動軸が配置されており、該伝動軸に前記フリーホイールが付属していることが好都合である。前記フリーホイールにフィードローラが付属していることが有利である。センターローラとフィードローラが機械的に互いに連結している練条機で、前記フリーホイールにセンターローラが付属していることが有利である。出口に設けた前記増分型回転変位センサが高い分解能を有することが好都合である。出口に設けた増分型回転変位センサが前記ローラの回転方向を検知できることが好ましい。前記第1の電動機によって駆動される1つ以上のローラに増分型回転変位センサが付属していることが有利である。こうすることによって、ドラフトを基準として練条機の正確な始動が実現される。入口に設けた前記増分型回転変位センサが高い分解能を有することが得策である。出口および/または入口に設けた高い分解能を有する増分型回転変位センサにより、静止状態の付近または少ない回転数でドラフトを維持することが可能である。電磁式増分型回転変位センサが設けられていることが好都合である。前記回転変位センサが前記ローラの回転数を検知することが好ましい。前記回転変位センサが前記ローラの回転角を検知することが有利である。前記回転変位センサが前記ローラの回転方向を検知することが好ましい。カプセルに収納した前記回転変位センサが存在していることが好都合である。1つの前記増分型回転変位センサまたは2つ以上の前記増分型回転変位センサが、電子制御調節装置、たとえばマイクロコンピュータに接続されていることが好ましい。前記電子制御調節装置が、前記増分型回転変位センサの信号から、前記ローラの回転数、回転角および/または回転方向を検知できることが有利である。前記メインモータが回転数制御可能であることが得策である。
【発明を実施するための最良の形態】
【0008】
以下に、本発明の実施例を図面に基づいて詳細に説明する。
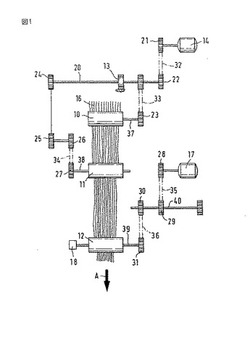
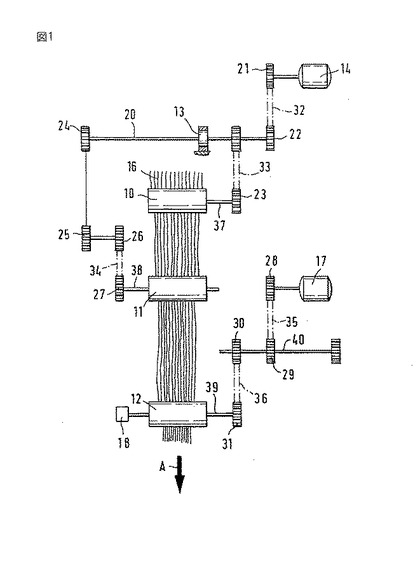
図1に示す自動調節練条機は、フィードローラ対10、10′、センターローラ対11、11′、フロントローラ対12、12′を有しており、これらのうちそれぞれボトムフィードローラ10、ボトムセンターローラ11およびボトムフロントローラ12が駆動されている。これらのボトムローラ10、11、12に、調節可能な押圧力で負荷された自由に回転できるトップローラ10′、11′、12′が付属している(図2参照)。ボトムフィードローラ10とボトムセンターローラ11は、変速比が所定のブレークドラフトに相応するギア段階を介して互いに連結している。ボトムセンターローラ11および従ってボトムフィードローラ10は電動機14によって駆動される。電動機14の後ろにはフリーホイール13が配置されている。フリーホイール13はボトムフィードローラ10およびボトムセンターローラ11が、幾つかのスライバからなる加工されるべき重合スライバ16の進行方向(矢印方向A)と反対に回転するのを妨げる。
【0009】
ボトムフロントローラ12は、固有の電動機17によって駆動されている。ボトムフロントローラ12は増分型回転センサ18が配置されている。
電動機14と17の回転数は電子調節装置によって制御されて、センターローラ11、11′とフロントローラ対12、12′との間のメインドラフト区域で所望の繊度までドラフトが行われると同時に、供給される重合スライバ16の質量のばらつきが可能な限り補償される。
【0010】
図1に従い、電動機14と駆動される2つのローラ10および11との間には共通伝動軸20が存在しており、これにフリーホイール13が付属している。連続した共通伝動軸20によって分岐が実現され、電動機14は伝動軸20を直接駆動し、次に伝動軸20から分岐して下流側で2つのローラ10および11を間接的に駆動する。このように構成することによって、一方ではローラ10、他方ではローラ11に対するギア段階もしくは変速段階を調節できることが有利である。フリーホイール13は、ローラ10、11と軸平行に配置されている。歯車または歯付きベルト車は21から31で表す。歯付きベルトは32から36で表す。作業方向における繊維材料の流れをAで表す。軸は37から40で表す。ボトムフロントローラ12には、増分型回転変位センサ18が付属している。
【0011】
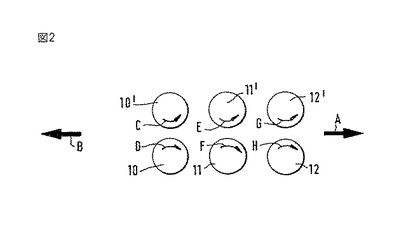
図3に従い、各々の電動機14、17には、それぞれ電子電動機調節装置41もしくは42(回転数制御)が付属しており、これは共通の電子機械制御装置43に接続されている。電動機14、17には、それぞれ1つのタコメータ発電機44もしくは45が付属している。タコメータ発電機44もしくは45は付属の電子電動機調節装置41もしくは42と連通している。電子電動機調節装置41、42はそれぞれ電気的に同調されて、停止時に電子機械制御装置43から電動機調節装置41、42に送られる回転数および回転方向の目標値46もしくは47は、正常運転(図2の矢印CからH参照)とは反対の方向に電動機14もしくは17のトルクを有する。ボトムセンターローラ11には、フリーホイール15が共軸に付属している。ボトムフロントローラ12に付属した増分型回転センサ18は、導線48を介して電気的に電子機械制御装置43と連通している。
【0012】
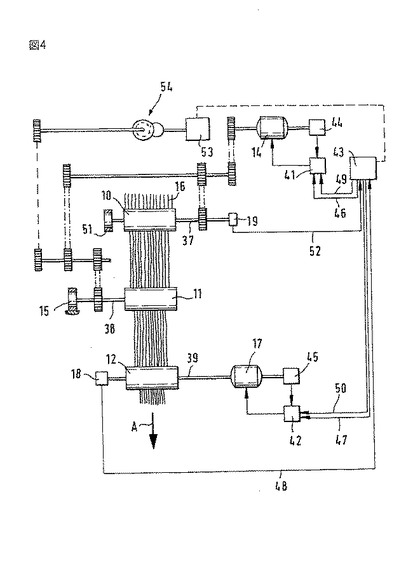
図4は、さらに電動機14、17の回転方向を規定する信号49もしくは50が、電子電動機制御装置43から電動機調節装置42もしくは41に入力されることを示している。ここでは目標値は回転数のみを規定する。
ボトムフィードローラ10にはフリーホイール51が共軸に配置されている。さらに、ボトムフィードローラ10には増分型回転変位センサ19が付属しており、これは導線52を介して電子機械制御装置43と連通している。
【0013】
図3には、電子機械制御装置が示されている。機械制御装置43と不均一性を補償するための電子調節装置(図示せず)を包含した共通の電子制御装置、たとえばマイクロコンピュータを使用できる。
53は、かみあいローラ対54の変位を電子信号に変換する測定値変換器を表している。
【0014】
ボトムローラ10、11もしくは12の駆動軸は、37、38、39で表す。ボトムローラ10、11、12は、たとえば1400、2000もしくは7200rpmの回転数と、たとえば35mm、35mmもしくは40mmの直径を有している。ローラ12、12′の出口では、スライバ進行速度はボトムローラ12の回転数7200rpmで約900m/minである。
【0015】
フリーホイール13、15もしくは51は戻り止めとして、運転中ローラを1方向、すなわち進行方向CからHの方向(図2参照)のみに回転できるようにする。練条機が停止した後、フリーホイールはローラが逆方向に回転するのを妨げる。
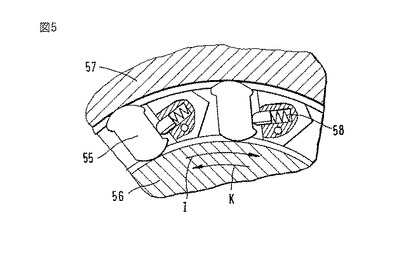
ボールベアリング型フリーホイールでは、ボールが堅牢な保持器に入っている。この保持器は、図5に従い、同時に個々にバネ作用を受けた幾つかのスプラグ55を案内している。スプラグ55は、その幾何学的形状に基づき自由回転方向Iに「浮き上がる傾向」があり、この傾向により高い回転数ではリング(内輪56と外輪57)と完全に接触しなくなる。重要なのは、ベアリングの十分な半径方向負荷に基づき保持器が十分な相対的回転数を有することである。このスプラグ型フリーホイール13、15もしくは51は無段階かつ摩擦係合的に作動する。スプラグ55は遠心力により自由回転方向I(送り方向)に浮き上がる。逆回転方向Kでは、スプラグ55のバネ58がリング56、57に押し付けられて締付け作用、したがって戻り止め作用が生じる。内輪56は、ボトムローラに対する駆動軸(たとえば20)上に、たとえばプレスばめによって固定している。そうすることによって、駆動軸に対して戻り止め作用が生じる。外輪57は回転しない。
【0016】
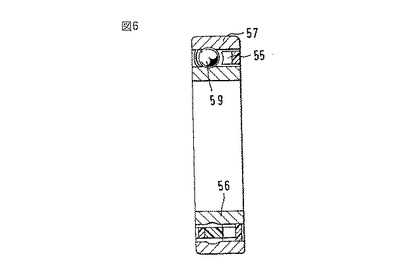
図5は、スプラグ型フリーホイールの部分図を示しており、スプラグ55がリング56、57に接しているのでK方向への逆回転が妨げられている。図6および図7には、スプラグ型フリーホイールとボールベアリングの組合わせが示されている。
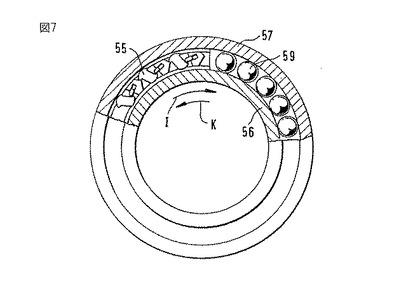
図7では、スプラグ55がリング56、57から浮き上がっている。つまり、自由回転Iが示されている。59はボールを表す。
【0017】
本発明はスプラグ型フリーホイールの例で示されているが、摩擦係合によって作用する他のフリーホイール、たとえばカムローラ型フリーホイールも包含する。さらに、本発明は、軸を独立の軸受、たとえばころ軸受で支持した非軸受式フリーホイールと、フリーホイールと、たとえばころ軸受(玉軸受、円筒ころ軸受、針軸受、球面ころ軸受)とが一体的な部材(図6、図7)を形成している軸受式フリーホイール(組合わせ)を包含している。
【0018】
フリーホイール13、15もしくは51の形態による戻り止めにより、静止状態でローラ10、10′、11、11′の逆回転を排除する課題が解決される。逆回転は事実上常に発生し、特にスライバおよび駆動ベルトのゆるみが原因で起こる。このように構成することによって、練条機の入口範囲でローラが好ましくない逆回転を起こすのが避けられる。増分型回転変位センサ18により、ローラ12、12′の逆回転がほぼ完全に、または完全に排除される。このようにすることによって、練条機の出口範囲でローラの好ましくない逆回転がほぼ完全に、または完全に避けられる。
【0019】
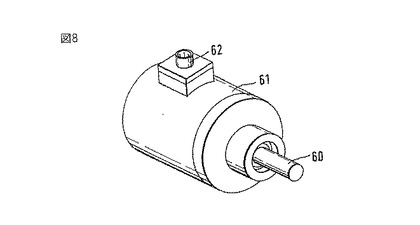
増分型回転変位センサ18、19(図8)は、周波数が監視されるべきローラの回転速度に比例する連続バルスを生み出す。回転変位センサ18は、たとえば位置、角度、回転数、速度などを検知するために、回転方向識別機能段を備えて構成されている。回転変位センサ19は、たとえば回転数、速度などだけを検知するために、回転方向識別機能を備えずに構成されている。測定ロッド60とカプセルに格納された測定ヘッド61を有する電磁式増分型回転変位センサを使用するのが好都合である。62は、電気的出力を表している。
【0020】
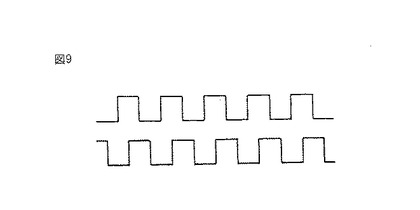
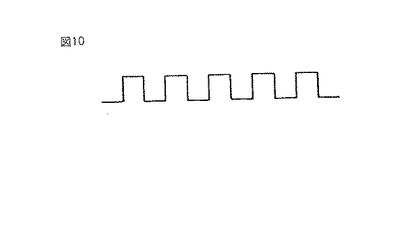
図9に従い、電気的に90度ずらした2つの正弦波形信号がパルス占有率1:1で方形パルスに変換され、2つの軌道で出力される。回転方向の識別が可能である。図10に従い、正弦波形信号電圧がパルス占有率1:1で方形パルスに変換される。1つの軌道のみ出力される。
図1〜図4に示されている実施例とは異なり、電動機14とボトムセンターローラ11との間にフリーホイールを配置できる。フリーホイールは、たとえば1つのギア段階で配置できる。フリーホイールを電動機14に組み込むこともできよう。
【図面の簡単な説明】
【0021】
【図1】図1は、共通伝動軸にフリーホイールが付属している、本発明の練条機の概略的な平面図である。
【図2】図2は、図1に従うローラ対の側面図である。
【図3】図3は、停止時に正常な回転方向にドリフトするのを妨げるために、フリーホイールと増分型回転変位センサを備えた装置のブロック線図である。
【図4】図4は、フリーホイールと2つの増分型回転変位センサを備えた装置である。
【図5】図5は、スプラグ型フリーホイールの部分詳細図を示す。
【図6】図6は、スプラグ型フリーホイールの中心軸線に沿った断面図を示す。
【図7】図7は、スプラグ型フリーホイールの横断面図を示す。
【図8】図8は、増分型回転変位センサを示す。
【図9】図9は、回転方向識別機能を有する回転変位センサの信号パターンを示す。
【図10】図10は、回転方向識別機能を有しない回転変位センサの信号パターンを示す。
【符号の説明】
【0022】
10、10′ フィードローラ対
11、11′ センターローラ対
12、12′ フロントローラ対
13 フリーホイール
14 電動機
15 フリーホイール
16 重合スライバ
17 電動機
18,20 増分型回転センサ
【技術分野】
【0001】
この発明は紡績機械用の練条機、特に綿、化学繊維のための自動調節練条機に関する。
【背景技術】
【0002】
それぞれ固有の電動機で駆動されるローラを備えた相前後する少なくとも2つのローラ対と、前記電動機が接続された電子制御調節装置とを有する、紡績機械用の練条機、特に綿、化学繊維などのための自動調節練条機は公知である。
【発明の開示】
【発明が解決しようとする課題】
【0003】
公知の練条機では、駆動されるローラに正常運転時の回転方向と反対に回転するのを妨げるそれぞれ1つのフリーホイールが付属している。この装置は、実用において機能することが実証された。電動機は(たとえ少しでも)不均一に逆回転することが起こり得る。ブレークドラフト用の電動機がメインドラフト用の電動機よりもやや強く逆回転すると、重合スライバにドラフト不良が発生することがある。
【0004】
本発明の課題は、上記の短所を回避して、特に重合スライバのドラフトをさらに改善する、冒頭に記載した種類の練条機を提供することである。
【課題を解決するための手段】
【0005】
上記課題を解決するために本発明の練条機は、第1の電動機によって駆動される1つ以上のローラにはフリーホイールが付属しており、別の電動機によって駆動される1つ以上のローラには増分型回転変位センサが付属しているようにした。
【0006】
練条機の入口にフリーホイールが付属し、出口に増分型回転変位センサが付属していることによって、電動機の可能な逆回転は互いに解離されている。別の電動機によって駆動されるローラ(練条機の出口)には増分型回転変位センサは付属しており、そうすることによってこのローラの回転の微調が可能である。フリーホイールが第1の電動機および付属する1つ以上のローラ(練条機の入口)の逆回転を妨げる一方、増分型回転変位センサの信号により別の電動機(練条機の出口)を通して電子逆転防止を実現できる。増分型回転変位センサはローラの回転数または回転量および回転方向の微細な変化を有利な仕方で検知できるので、相応に逆方向に制御したり反応したりできる。これにより、1つには出口で逆回転を妨げることができる。逆回転が少なければ、静止状態におけるローラの位置を正確に(つまり回転方向のほかに逆回転の量も)検知できるので、この位置から練条機は再び始動できる。上記の方策により、重合スライバのドラフトが改善される。
【0007】
前記第1の電動機が調節モータであり、前記別の電動機がメインモータであることが好都合である。前記第2の電動機の回転数は、加工されるべき重合スライバの不均一性を補償するために調節される。ブレークドラフト区域とメインドラフト区域とを有する練条機で、ブレークドラフト区域の駆動にはフリーホイールが付属し、メインドラフト区域の駆動には増分型回転変位センサが付属していることが好ましい。前記フリーホイールがスプラグ型フリーホイールであることが有利である。前記フリーホイールが前記ローラと共軸に配置されていることが得策である。前記フリーホイールが前記ローラと軸平行に配置されていることが好都合である。前記第1の電動機と駆動される少なくとも1つの前記ローラとの間に共通伝動軸が配置されており、該伝動軸に前記フリーホイールが付属していることが好都合である。前記フリーホイールにフィードローラが付属していることが有利である。センターローラとフィードローラが機械的に互いに連結している練条機で、前記フリーホイールにセンターローラが付属していることが有利である。出口に設けた前記増分型回転変位センサが高い分解能を有することが好都合である。出口に設けた増分型回転変位センサが前記ローラの回転方向を検知できることが好ましい。前記第1の電動機によって駆動される1つ以上のローラに増分型回転変位センサが付属していることが有利である。こうすることによって、ドラフトを基準として練条機の正確な始動が実現される。入口に設けた前記増分型回転変位センサが高い分解能を有することが得策である。出口および/または入口に設けた高い分解能を有する増分型回転変位センサにより、静止状態の付近または少ない回転数でドラフトを維持することが可能である。電磁式増分型回転変位センサが設けられていることが好都合である。前記回転変位センサが前記ローラの回転数を検知することが好ましい。前記回転変位センサが前記ローラの回転角を検知することが有利である。前記回転変位センサが前記ローラの回転方向を検知することが好ましい。カプセルに収納した前記回転変位センサが存在していることが好都合である。1つの前記増分型回転変位センサまたは2つ以上の前記増分型回転変位センサが、電子制御調節装置、たとえばマイクロコンピュータに接続されていることが好ましい。前記電子制御調節装置が、前記増分型回転変位センサの信号から、前記ローラの回転数、回転角および/または回転方向を検知できることが有利である。前記メインモータが回転数制御可能であることが得策である。
【発明を実施するための最良の形態】
【0008】
以下に、本発明の実施例を図面に基づいて詳細に説明する。
図1に示す自動調節練条機は、フィードローラ対10、10′、センターローラ対11、11′、フロントローラ対12、12′を有しており、これらのうちそれぞれボトムフィードローラ10、ボトムセンターローラ11およびボトムフロントローラ12が駆動されている。これらのボトムローラ10、11、12に、調節可能な押圧力で負荷された自由に回転できるトップローラ10′、11′、12′が付属している(図2参照)。ボトムフィードローラ10とボトムセンターローラ11は、変速比が所定のブレークドラフトに相応するギア段階を介して互いに連結している。ボトムセンターローラ11および従ってボトムフィードローラ10は電動機14によって駆動される。電動機14の後ろにはフリーホイール13が配置されている。フリーホイール13はボトムフィードローラ10およびボトムセンターローラ11が、幾つかのスライバからなる加工されるべき重合スライバ16の進行方向(矢印方向A)と反対に回転するのを妨げる。
【0009】
ボトムフロントローラ12は、固有の電動機17によって駆動されている。ボトムフロントローラ12は増分型回転センサ18が配置されている。
電動機14と17の回転数は電子調節装置によって制御されて、センターローラ11、11′とフロントローラ対12、12′との間のメインドラフト区域で所望の繊度までドラフトが行われると同時に、供給される重合スライバ16の質量のばらつきが可能な限り補償される。
【0010】
図1に従い、電動機14と駆動される2つのローラ10および11との間には共通伝動軸20が存在しており、これにフリーホイール13が付属している。連続した共通伝動軸20によって分岐が実現され、電動機14は伝動軸20を直接駆動し、次に伝動軸20から分岐して下流側で2つのローラ10および11を間接的に駆動する。このように構成することによって、一方ではローラ10、他方ではローラ11に対するギア段階もしくは変速段階を調節できることが有利である。フリーホイール13は、ローラ10、11と軸平行に配置されている。歯車または歯付きベルト車は21から31で表す。歯付きベルトは32から36で表す。作業方向における繊維材料の流れをAで表す。軸は37から40で表す。ボトムフロントローラ12には、増分型回転変位センサ18が付属している。
【0011】
図3に従い、各々の電動機14、17には、それぞれ電子電動機調節装置41もしくは42(回転数制御)が付属しており、これは共通の電子機械制御装置43に接続されている。電動機14、17には、それぞれ1つのタコメータ発電機44もしくは45が付属している。タコメータ発電機44もしくは45は付属の電子電動機調節装置41もしくは42と連通している。電子電動機調節装置41、42はそれぞれ電気的に同調されて、停止時に電子機械制御装置43から電動機調節装置41、42に送られる回転数および回転方向の目標値46もしくは47は、正常運転(図2の矢印CからH参照)とは反対の方向に電動機14もしくは17のトルクを有する。ボトムセンターローラ11には、フリーホイール15が共軸に付属している。ボトムフロントローラ12に付属した増分型回転センサ18は、導線48を介して電気的に電子機械制御装置43と連通している。
【0012】
図4は、さらに電動機14、17の回転方向を規定する信号49もしくは50が、電子電動機制御装置43から電動機調節装置42もしくは41に入力されることを示している。ここでは目標値は回転数のみを規定する。
ボトムフィードローラ10にはフリーホイール51が共軸に配置されている。さらに、ボトムフィードローラ10には増分型回転変位センサ19が付属しており、これは導線52を介して電子機械制御装置43と連通している。
【0013】
図3には、電子機械制御装置が示されている。機械制御装置43と不均一性を補償するための電子調節装置(図示せず)を包含した共通の電子制御装置、たとえばマイクロコンピュータを使用できる。
53は、かみあいローラ対54の変位を電子信号に変換する測定値変換器を表している。
【0014】
ボトムローラ10、11もしくは12の駆動軸は、37、38、39で表す。ボトムローラ10、11、12は、たとえば1400、2000もしくは7200rpmの回転数と、たとえば35mm、35mmもしくは40mmの直径を有している。ローラ12、12′の出口では、スライバ進行速度はボトムローラ12の回転数7200rpmで約900m/minである。
【0015】
フリーホイール13、15もしくは51は戻り止めとして、運転中ローラを1方向、すなわち進行方向CからHの方向(図2参照)のみに回転できるようにする。練条機が停止した後、フリーホイールはローラが逆方向に回転するのを妨げる。
ボールベアリング型フリーホイールでは、ボールが堅牢な保持器に入っている。この保持器は、図5に従い、同時に個々にバネ作用を受けた幾つかのスプラグ55を案内している。スプラグ55は、その幾何学的形状に基づき自由回転方向Iに「浮き上がる傾向」があり、この傾向により高い回転数ではリング(内輪56と外輪57)と完全に接触しなくなる。重要なのは、ベアリングの十分な半径方向負荷に基づき保持器が十分な相対的回転数を有することである。このスプラグ型フリーホイール13、15もしくは51は無段階かつ摩擦係合的に作動する。スプラグ55は遠心力により自由回転方向I(送り方向)に浮き上がる。逆回転方向Kでは、スプラグ55のバネ58がリング56、57に押し付けられて締付け作用、したがって戻り止め作用が生じる。内輪56は、ボトムローラに対する駆動軸(たとえば20)上に、たとえばプレスばめによって固定している。そうすることによって、駆動軸に対して戻り止め作用が生じる。外輪57は回転しない。
【0016】
図5は、スプラグ型フリーホイールの部分図を示しており、スプラグ55がリング56、57に接しているのでK方向への逆回転が妨げられている。図6および図7には、スプラグ型フリーホイールとボールベアリングの組合わせが示されている。
図7では、スプラグ55がリング56、57から浮き上がっている。つまり、自由回転Iが示されている。59はボールを表す。
【0017】
本発明はスプラグ型フリーホイールの例で示されているが、摩擦係合によって作用する他のフリーホイール、たとえばカムローラ型フリーホイールも包含する。さらに、本発明は、軸を独立の軸受、たとえばころ軸受で支持した非軸受式フリーホイールと、フリーホイールと、たとえばころ軸受(玉軸受、円筒ころ軸受、針軸受、球面ころ軸受)とが一体的な部材(図6、図7)を形成している軸受式フリーホイール(組合わせ)を包含している。
【0018】
フリーホイール13、15もしくは51の形態による戻り止めにより、静止状態でローラ10、10′、11、11′の逆回転を排除する課題が解決される。逆回転は事実上常に発生し、特にスライバおよび駆動ベルトのゆるみが原因で起こる。このように構成することによって、練条機の入口範囲でローラが好ましくない逆回転を起こすのが避けられる。増分型回転変位センサ18により、ローラ12、12′の逆回転がほぼ完全に、または完全に排除される。このようにすることによって、練条機の出口範囲でローラの好ましくない逆回転がほぼ完全に、または完全に避けられる。
【0019】
増分型回転変位センサ18、19(図8)は、周波数が監視されるべきローラの回転速度に比例する連続バルスを生み出す。回転変位センサ18は、たとえば位置、角度、回転数、速度などを検知するために、回転方向識別機能段を備えて構成されている。回転変位センサ19は、たとえば回転数、速度などだけを検知するために、回転方向識別機能を備えずに構成されている。測定ロッド60とカプセルに格納された測定ヘッド61を有する電磁式増分型回転変位センサを使用するのが好都合である。62は、電気的出力を表している。
【0020】
図9に従い、電気的に90度ずらした2つの正弦波形信号がパルス占有率1:1で方形パルスに変換され、2つの軌道で出力される。回転方向の識別が可能である。図10に従い、正弦波形信号電圧がパルス占有率1:1で方形パルスに変換される。1つの軌道のみ出力される。
図1〜図4に示されている実施例とは異なり、電動機14とボトムセンターローラ11との間にフリーホイールを配置できる。フリーホイールは、たとえば1つのギア段階で配置できる。フリーホイールを電動機14に組み込むこともできよう。
【図面の簡単な説明】
【0021】
【図1】図1は、共通伝動軸にフリーホイールが付属している、本発明の練条機の概略的な平面図である。
【図2】図2は、図1に従うローラ対の側面図である。
【図3】図3は、停止時に正常な回転方向にドリフトするのを妨げるために、フリーホイールと増分型回転変位センサを備えた装置のブロック線図である。
【図4】図4は、フリーホイールと2つの増分型回転変位センサを備えた装置である。
【図5】図5は、スプラグ型フリーホイールの部分詳細図を示す。
【図6】図6は、スプラグ型フリーホイールの中心軸線に沿った断面図を示す。
【図7】図7は、スプラグ型フリーホイールの横断面図を示す。
【図8】図8は、増分型回転変位センサを示す。
【図9】図9は、回転方向識別機能を有する回転変位センサの信号パターンを示す。
【図10】図10は、回転方向識別機能を有しない回転変位センサの信号パターンを示す。
【符号の説明】
【0022】
10、10′ フィードローラ対
11、11′ センターローラ対
12、12′ フロントローラ対
13 フリーホイール
14 電動機
15 フリーホイール
16 重合スライバ
17 電動機
18,20 増分型回転センサ
【特許請求の範囲】
【請求項1】
スライバを進行方向に練条する練条機において、
(a)前記進行方向に互いに離間して配置された第一および第二の練条ロールの対を具備し、これら練条ロールの対のそれぞれは二つの協働する練条ロールを含んでおり、前記練条ロールのそれぞれの対における一方の練条ロールは被駆動ロールであり、
さらに、
(b)第一および第二の駆動電動機と、
(c)前記第一の練条ロールの対の前記被駆動ロールと前記第一の駆動電動機とに接続されていて、前記第一の練条ロールの対を所定の方向に駆動して前記スライバを前記進行方向に供給する第一のトルク伝達手段と、
(d)前記第二の練条ロールの対の前記被駆動ロールと前記第二の駆動電動機とに接続されていて、記第二の練条ロールの対を前記所定の方向に駆動して前記スライバを前記進行方向に供給する第二のトルク伝達手段と、
(e)前記第一および第二の駆動電動機に接続された電子機械制御装置と、
(f)前記第一の練条ロールの対の前記被駆動ロールに接続されていて、該被駆動ロールが前記所定の方向とは反対方向に回転するのを防止するフリーホイール式戻り止めと、
(g)前記第二の練条ロールの対の前記被駆動ロールに結合されていて、前記第二の練条ロールの対の前記被駆動ロールの回転データを表す信号を送信する増分型回転変位センサとを具備し、前記増分型回転変位センサは前記電子機械制御装置に接続されていて、前記信号を前記電子機械制御装置に送信し、前記電子機械制御装置は、前記信号により、前記第二の駆動電動機および前記第二の練条ロールの対が逆回転するのを防止する練条機。
【請求項2】
前記フリーホイール式戻り止めがスプラグ型フリーホイールである、請求項1に記載の練条機。
【請求項3】
前記フリーホイール式戻り止めが前記第二の練条ロールの対の前記被駆動ロールと共軸に配置されている、請求項1に記載の練条機。
【請求項4】
前記フリーホイール式戻り止めが前記第二の練条ロールの対の前記被駆動ロールに対して軸平行に配置されている、請求項1に記載の練条機。
【請求項5】
さらに、前記第一および第二の練条ロールの対の間に配置されていて、それぞれが二つの協働する練条ロールを含んでいる第三の練条ロールの対を具備し、該第三の練条ロールの対のうちの一方の練条ロールは被駆動ロールであり、さらに、前記第一のトルク伝達手段は、前記第一の駆動電動機を前記第一および第三の練条ロールの対の前記被駆動ロールにトルク伝達可能に接続する駆動軸を含んでおり、前記フリーホイール式戻り止めが前記駆動軸に取付けられている請求項1に記載の練条機。
【請求項6】
さらに、前記第一および第二の練条ロールの対の間に配置されていて、それぞれが二つの協働する練条ロールを含んでいる第三の練条ロールの対を具備し、該第三の練条ロールの対のうちの一方の練条ロールは被駆動ロールであり、さらに、前記第一のトルク伝達手段は、前記第一の駆動電動機を前記第一および第三の練条ロールの対の前記被駆動ロールにトルク伝達可能に接続しており、前記第一の練条ロールの対の前記被駆動ロールはロール軸を有しており、前記フリーホイール式戻り止めは前記ロール軸に取付けられている請求項1に記載の練条機。
【請求項7】
さらに、前記第一および第二の練条ロールの対の間に配置されていて、それぞれが二つの協働する練条ロールを含んでいる第三の練条ロールの対を具備し、該第三の練条ロールの対のうちの一方の練条ロールは被駆動ロールであり、さらに、前記第一のトルク伝達手段は、前記第一の駆動電動機を前記第一および第三の練条ロールの対の前記被駆動ロールにトルク伝達可能に接続しており、前記第三の練条ロールの対の前記被駆動ロールはロール軸を有しており、前記フリーホイール式戻り止めは前記ロール軸に取付けられている請求項1に記載の練条機。
【請求項8】
前記増分型回転変位センサは高分解能で動作する請求項1に記載の練条機。
【請求項9】
前記回転データは、前記第二の練条ロールの対の前記被駆動ロールの回転方向、回転数および回転角のうちの一つである請求項1に記載の練条機。
【請求項10】
前記増分型回転変位センサは、カプセルに収納されている請求項1に記載の練条機。
【請求項11】
前記増分型回転変位センサは電磁式増分型回転変位センサである請求項1に記載の練条機。
【請求項12】
前記第二の駆動電動機は回転数可変式である請求項1に記載の練条機。
【請求項13】
さらに、前記電子機械制御装置と前記第一の駆動電動機とに接続されていて、前記第一の駆動電動機の回転数を変更させるスライバ調整装置を具備する請求項1に記載の練条機。
【請求項14】
さらに、前記電子機械制御装置および前記第一および第二の駆動電動機にそれぞれ接続された第一および第二の電子電動機調節装置を具備する請求項1に記載の練条機。
【請求項15】
前記増分型回転変位センサは第一の増分型回転変位センサであり、
さらに、前記第一の練条ロールの対の前記被駆動ロールに結合されていて、前記第一の練条ロールの対の前記被駆動ロールの回転データを表す信号を発信する第二の増分型回転変位センサを具備する請求項1に記載の練条機。
【請求項16】
前記第二の増分型回転変位センサは前記電子機械制御装置に接続されていて、前記第二の増分型回転変位センサにより発信された前記信号を前記電子機械制御装置に送信する請求項15に記載の練条機。
【請求項17】
前記第一の練条ロールの対の前記被駆動ロールの前記回転データは、前記一の練条ロールの対の前記被駆動ロールの回転方向、回転数および回転角のうちの一つである請求項15に記載の練条機。
【請求項18】
前記第二の増分型回転変位センサは高分解能で動作する請求項15に記載の練条機。
【請求項1】
スライバを進行方向に練条する練条機において、
(a)前記進行方向に互いに離間して配置された第一および第二の練条ロールの対を具備し、これら練条ロールの対のそれぞれは二つの協働する練条ロールを含んでおり、前記練条ロールのそれぞれの対における一方の練条ロールは被駆動ロールであり、
さらに、
(b)第一および第二の駆動電動機と、
(c)前記第一の練条ロールの対の前記被駆動ロールと前記第一の駆動電動機とに接続されていて、前記第一の練条ロールの対を所定の方向に駆動して前記スライバを前記進行方向に供給する第一のトルク伝達手段と、
(d)前記第二の練条ロールの対の前記被駆動ロールと前記第二の駆動電動機とに接続されていて、記第二の練条ロールの対を前記所定の方向に駆動して前記スライバを前記進行方向に供給する第二のトルク伝達手段と、
(e)前記第一および第二の駆動電動機に接続された電子機械制御装置と、
(f)前記第一の練条ロールの対の前記被駆動ロールに接続されていて、該被駆動ロールが前記所定の方向とは反対方向に回転するのを防止するフリーホイール式戻り止めと、
(g)前記第二の練条ロールの対の前記被駆動ロールに結合されていて、前記第二の練条ロールの対の前記被駆動ロールの回転データを表す信号を送信する増分型回転変位センサとを具備し、前記増分型回転変位センサは前記電子機械制御装置に接続されていて、前記信号を前記電子機械制御装置に送信し、前記電子機械制御装置は、前記信号により、前記第二の駆動電動機および前記第二の練条ロールの対が逆回転するのを防止する練条機。
【請求項2】
前記フリーホイール式戻り止めがスプラグ型フリーホイールである、請求項1に記載の練条機。
【請求項3】
前記フリーホイール式戻り止めが前記第二の練条ロールの対の前記被駆動ロールと共軸に配置されている、請求項1に記載の練条機。
【請求項4】
前記フリーホイール式戻り止めが前記第二の練条ロールの対の前記被駆動ロールに対して軸平行に配置されている、請求項1に記載の練条機。
【請求項5】
さらに、前記第一および第二の練条ロールの対の間に配置されていて、それぞれが二つの協働する練条ロールを含んでいる第三の練条ロールの対を具備し、該第三の練条ロールの対のうちの一方の練条ロールは被駆動ロールであり、さらに、前記第一のトルク伝達手段は、前記第一の駆動電動機を前記第一および第三の練条ロールの対の前記被駆動ロールにトルク伝達可能に接続する駆動軸を含んでおり、前記フリーホイール式戻り止めが前記駆動軸に取付けられている請求項1に記載の練条機。
【請求項6】
さらに、前記第一および第二の練条ロールの対の間に配置されていて、それぞれが二つの協働する練条ロールを含んでいる第三の練条ロールの対を具備し、該第三の練条ロールの対のうちの一方の練条ロールは被駆動ロールであり、さらに、前記第一のトルク伝達手段は、前記第一の駆動電動機を前記第一および第三の練条ロールの対の前記被駆動ロールにトルク伝達可能に接続しており、前記第一の練条ロールの対の前記被駆動ロールはロール軸を有しており、前記フリーホイール式戻り止めは前記ロール軸に取付けられている請求項1に記載の練条機。
【請求項7】
さらに、前記第一および第二の練条ロールの対の間に配置されていて、それぞれが二つの協働する練条ロールを含んでいる第三の練条ロールの対を具備し、該第三の練条ロールの対のうちの一方の練条ロールは被駆動ロールであり、さらに、前記第一のトルク伝達手段は、前記第一の駆動電動機を前記第一および第三の練条ロールの対の前記被駆動ロールにトルク伝達可能に接続しており、前記第三の練条ロールの対の前記被駆動ロールはロール軸を有しており、前記フリーホイール式戻り止めは前記ロール軸に取付けられている請求項1に記載の練条機。
【請求項8】
前記増分型回転変位センサは高分解能で動作する請求項1に記載の練条機。
【請求項9】
前記回転データは、前記第二の練条ロールの対の前記被駆動ロールの回転方向、回転数および回転角のうちの一つである請求項1に記載の練条機。
【請求項10】
前記増分型回転変位センサは、カプセルに収納されている請求項1に記載の練条機。
【請求項11】
前記増分型回転変位センサは電磁式増分型回転変位センサである請求項1に記載の練条機。
【請求項12】
前記第二の駆動電動機は回転数可変式である請求項1に記載の練条機。
【請求項13】
さらに、前記電子機械制御装置と前記第一の駆動電動機とに接続されていて、前記第一の駆動電動機の回転数を変更させるスライバ調整装置を具備する請求項1に記載の練条機。
【請求項14】
さらに、前記電子機械制御装置および前記第一および第二の駆動電動機にそれぞれ接続された第一および第二の電子電動機調節装置を具備する請求項1に記載の練条機。
【請求項15】
前記増分型回転変位センサは第一の増分型回転変位センサであり、
さらに、前記第一の練条ロールの対の前記被駆動ロールに結合されていて、前記第一の練条ロールの対の前記被駆動ロールの回転データを表す信号を発信する第二の増分型回転変位センサを具備する請求項1に記載の練条機。
【請求項16】
前記第二の増分型回転変位センサは前記電子機械制御装置に接続されていて、前記第二の増分型回転変位センサにより発信された前記信号を前記電子機械制御装置に送信する請求項15に記載の練条機。
【請求項17】
前記第一の練条ロールの対の前記被駆動ロールの前記回転データは、前記一の練条ロールの対の前記被駆動ロールの回転方向、回転数および回転角のうちの一つである請求項15に記載の練条機。
【請求項18】
前記第二の増分型回転変位センサは高分解能で動作する請求項15に記載の練条機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−239175(P2007−239175A)
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願番号】特願2007−127322(P2007−127322)
【出願日】平成19年5月11日(2007.5.11)
【分割の表示】特願平9−292993の分割
【原出願日】平成9年10月24日(1997.10.24)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願日】平成19年5月11日(2007.5.11)
【分割の表示】特願平9−292993の分割
【原出願日】平成9年10月24日(1997.10.24)
【出願人】(590002323)ツリュツラー ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト (85)
【Fターム(参考)】
[ Back to top ]