
細胞操作観察装置

【課題】細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすこと。
【解決手段】細胞へ物質を導入して観察する細胞操作観察装置10は、細胞を培養するディッシュ16を載置するディッシュホルダ20を顕微鏡XYステージ26により水平方向に移動して、物質の導入を行う細胞の位置として指定された位置を、CCDカメラ46の視野内の、チップ駆動装置14のチップ部58の位置に相当する所定の細胞操作位置に配置し、細胞操作ツールとしてのニードル60先端のチップ部58により、その所定の細胞操作位置に移動された細胞の細胞膜を穿孔することで、上記ディッシュ16内の培養液中に混濁させた導入物質を上記細胞に導入する。また、モニタ36に、観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する。
【解決手段】細胞へ物質を導入して観察する細胞操作観察装置10は、細胞を培養するディッシュ16を載置するディッシュホルダ20を顕微鏡XYステージ26により水平方向に移動して、物質の導入を行う細胞の位置として指定された位置を、CCDカメラ46の視野内の、チップ駆動装置14のチップ部58の位置に相当する所定の細胞操作位置に配置し、細胞操作ツールとしてのニードル60先端のチップ部58により、その所定の細胞操作位置に移動された細胞の細胞膜を穿孔することで、上記ディッシュ16内の培養液中に混濁させた導入物質を上記細胞に導入する。また、モニタ36に、観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、細胞へ遺伝子等の物質を導入して観察する細胞操作観察装置に関する。
【背景技術】
【0002】
特許文献1には、操作する細胞を顕微鏡視野下で選定し、その座標値を記録すると共に、基準点2点を設け、座標変換することにより、培養器を再配置しても、導入細胞の位置が再現できる細胞位置教示方法および単一細胞操作支援ロボットが開示されている。これにより、顕微鏡視野内の細胞をモニタ表示を見ながら任意に選定し、細胞操作を行うことができる。
【0003】
また、特許文献2には、培養器に対応した図が表示されるとともに、観察中の現在のカメラ位置および移動したい位置、および、過去に観察した位置の記録が表示される培養装置が開示されている。これにより、操作者は、培養器中のどの位置を観察しているのかを、モニタ表示により確認することができる。
【特許文献1】特開2005−326341号公報
【特許文献2】特開2006−141326号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
一般的に培養器は、顕微鏡視野範囲に対して大きい領域を有し、また、細胞を溶液中に浸して培養する都合上、周囲が側壁で覆われている。このため、細胞を操作する細胞操作ツール、もしくは、培養器を載置する顕微鏡ステージを不用意に動かすと、細胞操作ツールと培養器とが干渉し、細胞操作ツールを培養器内の細胞にぶつけてしまい、細胞にダメージを与えてしまうことがある。
【0005】
しかるに、上記特許文献1の技術では、培養器のごく一部の顕微鏡視野内を表示するのみであるため、操作者が、培養器中のどの位置で細胞操作を行っているのか把握しにくく、細胞操作ツールを細胞にぶつけてしまう危険性がある。
【0006】
また、上記特許文献2の技術においても、細胞操作を行う際に、干渉することなく安全に操作が行える範囲は、細胞操作ツールの形状、培養器の形状によって異なるため、培養器に対応した図を表示しただけでは把握しにくく、やはり、細胞操作ツールを細胞にぶつけてしまう危険性が残されている。
【0007】
本発明は、上記の点に鑑みてなされたもので、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすことが可能な細胞操作観察装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の細胞操作観察装置の一態様は、細胞へ物質を導入して観察する細胞操作観察装置において、
細胞を培養する培養器を水平方向に移動可能に載置するステージと、
上記ステージに載置された上記培養器内の細胞を撮像して表示する観察手段と、
上記観察手段によって観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する図表示手段と、
上記ステージに載置された上記培養器内の細胞の内、物質の導入を行う細胞の位置を指定する指定手段と、
上記ステージを駆動して、上記指定手段によって指定された位置を上記観察手段の視野内の所定の細胞操作位置に配置する導入位置配置手段と、
上記導入位置配置手段によって上記所定の細胞操作位置に移動された細胞の細胞膜を細胞操作ツールによって穿孔することで、上記培養器内の培養液中に混濁させた導入物質を上記細胞に導入する細胞操作手段と、
を具備することを特徴とする。
【発明の効果】
【0009】
本発明によれば、観察範囲を示す図に細胞操作範囲と現在位置とを重ね合わせて表示することで、現在位置が細胞操作範囲を外れないように操作可能となるので、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすことが可能な細胞操作観察装置を提供することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明を実施するための最良の形態を図面を参照して説明する。
【0011】
[第1実施形態]
本発明の第1実施形態に係る細胞操作観察装置10は、図1に示すように、細胞を観察するための倒立型顕微鏡12と、それに取り付けられるチップ駆動装置14とかを含む。
【0012】
倒立型顕微鏡12は、細胞を培養する培養器であるディッシュ16を載置するθテーブル18を備えるディッシュホルダ20と、該ディッシュホルダ20上の細胞を照明する照明装置22と、細胞において反射あるいは透過した光、あるいは細胞から発生した蛍光を観察する観察装置24と、上記ディッシュホルダ20をX方向及びY方向に移動する顕微鏡XYステージ26と、該顕微鏡XYステージ26の移動を指示するためのXYステージ操作用ジョイスティック28と、該XYステージ操作用ジョイスティック28からの指示に従って上記顕微鏡XYステージ26及び上記θテーブル18を駆動制御するディッシュホルダ移動コントローラ30と、上記照明装置22及び観察装置24を制御する顕微鏡コントローラ32と、上記観察装置24により得られた画像を処理する画像処理装置34と、該画像処理装置34により処理された画像を表示するモニタ36を備え、上記ディッシュホルダ移動コントローラ30及び上記顕微鏡コントローラ32を介して該倒立型顕微鏡12の全体を制御する制御コンピュータ38と、を備えている。
【0013】
また、上記照明装置22には、細胞に対して、上記観察装置24とは反対側から照明光を照射する透過照明光源40と、該透過照明光源40から発せられた照明光を細胞に集光するコンデンサレンズ42と、細胞に対して上記観察装置24と同一方向から照明光を照射する落射照明光源44とが備えられている。
【0014】
一方、上記観察装置24には、図示しない対物レンズを含む観察光学系と、該観察光学系を介した細胞からの光を撮像して画像を取得するCCDカメラ46と、細胞からの光を直接観察する接眼レンズ48とが備えられている。
【0015】
そして、本実施形態に係るチップ駆動装置14は、装置本体50と、該装置本体50のコンデンサレンズ42への取り付け部である顕微鏡アダプタ52と、任意の位置に設置可能な操作モジュール54と、該操作モジュール54の操作に従って装置本体50を制御するコントロールボックス56から構成されている。なお、コントロールボックス56は、上記ディッシュホルダ移動コントローラ30を介して上記制御コンピュータ38に接続され、該制御コンピュータ38によって操作本体50を制御可能に構成されている。また、図1では、装置本体50を、接眼レンズ48が設けられた側である倒立型顕微鏡12の前面側に対し、コンデンサレンズ42の右側に装着した状態を示している。
【0016】
装置本体50は、駆動対象であるチップ部58を備える細胞操作ツールとしてのニードル60を装着したアダプタ62を取り付けるためのアダプタ保持部64と、該アダプタ保持部64をZ方向に移動することで上記チップ部58をZ方向に移動させるZ駆動部66と、上記アダプタ保持部64をX方向及びY方向に移動することで上記チップ部58のXY位置を調整する針位置調整ノブ(図示せず)と、を備えている。
【0017】
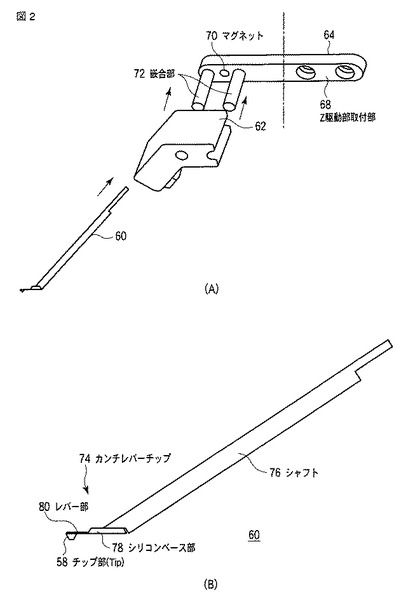
ここで、アダプタ保持部64には、図2(A)に示すように、Z駆動部66の図示しない直線移動機構に、図示しないXY駆動機構(コントロールボックス56はこの駆動機構によりアダプタ保持部64を駆動する)を介して取り付けるためのZ駆動部取付部68とは長手方向反対側に、上記アダプタ62を着脱自在に装着するための装着部材、例えばアダプタ62が金属製ないしは対応する箇所に金属部を設けたものであればマグネット70、が設けられている。なお、図2(A)において、一点鎖線の右側が装置本体50内に収容される部分である。即ち、上記マグネット70は、装置本体50外部となる位置に設けられている。また、このマグネット70の近傍に、アダプタ62の位置決めのために、アダプタ62に設けられた穴や溝に嵌合する嵌合部72が配設されている。嵌合部72は、倒立型顕微鏡12の前面側に向けて突出しており、アダプタ62がこの前面側から差し込みにより装着できるようになっている。
【0018】
なお、装置本体50がコンデンサレンズ42の左側に装着された際にもアダプタ62を装着できるように、マグネット70及び嵌合部72をアダプタ保持部64の裏面側にも設けても良い。あるいは、装置本体50の装着位置に応じて、アダプタ保持部64を交換可能に構成しても良い。
【0019】
上記アダプタ62に装着されるニードル60は、図2(B)に示すように、チップ部58を形成したカンチレバーチップ74を、該カンチレバーチップ74を保持するためのシャフト76の先端に接着して構成されている。カンチレバーチップ74は、シリコンプロセスにより製造されるもので、他の部分との接着用のシリコンベース部78と、該シリコンベース部78から延在し、例えば厚み2.7μm、長さ240μmで2N/m程度の弾性定数を持つ可撓性のレバー部80と、該レバー部80の自由端に、該レバー部80の長手方向に対しておおむね90度の角度で形成された上記チップ部58とからなる。
【0020】
本実施形態におけるチップ駆動装置14では、上記ニードル60をアダプタ62に空けられた図示しない穴に挿入・固定し、その後、該ニードル60を装着したアダプタ62を装置本体50に装着するようになっている。こうすることで、基本的に交換品度の高い構成品(消耗品)であるニードル60を交換することができ、コンタミネーションの虞なく、該チップ駆動装置14を繰り返し使用することができる。
【0021】
また、細長いニードル60を装置本体50に直接装着する構成とすると、作業性が悪く、装着作業時にチップ部58がディッシュホルダ20等の倒立型顕微鏡12の何処かに当たって破損してしまう虞がある。本実施形態では、装置本体50から取り外したアダプタ62にニードル60を装着した上で、該アダプタ62を装置本体50の前面側から装着するようにしているので、そのような破損の虞を少なくすることができる。
【0022】
なお、アダプタ62は、装置本体50に装着された際に、ニードル60のシャフト76を所定の角度で斜め下方に向けて保持するように構成されており、また、カンチレバーチップ74はこのシャフト76に対して所定の角度となるように接着されている。また、上記したようにチップ部58は、レバー部80の長手方向に対して交差する方向に延びるように設けられている。従って、アダプタ62が装置本体50に装着された状態では、チップ部58は、レバー部80の自由端において、先端をほぼ鉛直下方に向けて保持されることとなる。
【0023】
上記アダプタ62がシャフト76を保持する固定角度については、以下のようにして決められている。即ち、図3(A)に示すように、シャフト76を起き上げ過ぎると、コンデンサレンズ42に干渉してしまう。ニードル60の長さを例えば約50mmとすると、シャフト76を60度よりも起き上げるとコンデンサレンズ42に干渉してしまう。また逆に、シャフト76を寝かし過ぎると、ディッシュ16の周壁部に干渉してしまう。一般に、細胞培養で使用される頻度の高い35mmガラスボトムディッシュでは、30度よりも寝かすとディッシュ16の周壁部に干渉してしまう。従って、本実施形態では、30度乃至60度の中間である45度に設定している。
【0024】
アダプタ62によりシャフト76を45度の角度で保持するように設定した場合、図3(B)に一点鎖線で示すような可動範囲82が得られ、上記35mmガラスボトムディッシュのガラス面(φ14mm程度)は、コンデンサレンズ42やディッシュ16の周壁部に干渉することなく作業が行える。
【0025】
このように、アダプタ62がシャフト76を保持する固定角度は、コンデンサレンズ42と使用するディッシュ16への干渉を考慮して、ニードル60に十分な可動範囲82を与えるように決定している。そして、アダプタ62には、ニードル60を挿入・固定するため図示しない穴が、この固定角度でシャフト76を保持するような角度を持って形成されている。
【0026】
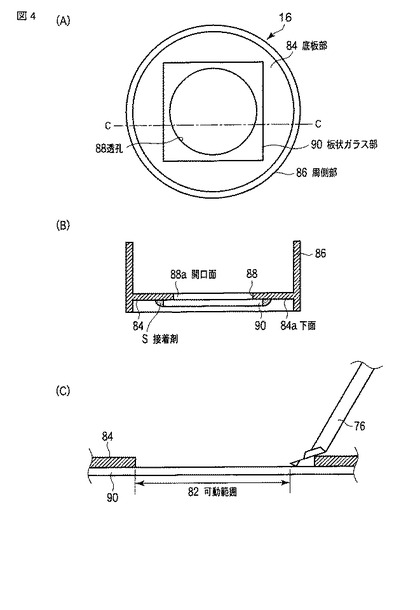
なお、上記ディッシュ16として使用されるガラスベースディッシュは、図4(A)及び(B)に示すように、ポリスチレンなどの合成樹脂材からなる底板部84と周側部86とで円筒状に形成されており、その底板部84の中心部位には、円形を呈する透孔88が1個穿設されている。そして、底板部84には、下面84a側から透孔88の開口面88aを完全に覆うに足る板状ガラス部90がシリコン系接着剤やアクリレート系接着剤などからなる接着剤Sを介して接合されており、該板状ガラス部90により透孔88の開口面88aの全体が遮蔽されている。こうして、底板部84と板状ガラス部90とによって、ディッシュ16の底部が構成される。
【0027】
このような構造を持つディッシュ16では、図4(C)に示すように、シャフト76がディッシュ16の底板部84に干渉することなくニードル60を移動させることができる可動範囲82は、透孔88の開口面88aよりも狭い範囲に制限されてしまう。この可動範囲82は、シャフト76の径やカンチレバーチップ74の長さ等によって変化する。なお勿論、θテーブル18を備えることで、該θテーブル18を駆動してディッシュ16を回転させることによって、このディッシュ16の底板部84との干渉による制限に関しては回避可能である。
【0028】
このように、本実施形態に係る細胞操作観察装置10では、倒立型顕微鏡12で観察可能な範囲である観察範囲は、細胞が培養されるディッシュ16の透孔88の開口面88a全体であるのに対して、チップ駆動装置14によって細胞操作可能な範囲である細胞操作範囲は、上記可動範囲82となり、観察範囲と細胞操作範囲とが異なることとなる。
【0029】
一方、チップ駆動装置14の操作モジュール54は、特に図示しないが、Z値セットボタンを備えている。このZ値セットボタンは、Z方向任意の位置を記憶する指示を行うためのボタンであり、上記Z駆動部66によるアダプタ保持部64のZ方向への駆動操作を該操作モジュール54で行っても、このZ値セットボタンにより記憶された位置よりも下(ディッシュ16内の細胞の方向)にはアダプタ保持部64が下降しないようにするものである。なお、このZ値セットボタンは、ラッチ機構を備えており、操作者が押下操作即ちON操作すると、再度押下操作されるまで、その押下状態即ちON状態を維持する。以降、Z値セットボタンがOFF状態を「第1モード」と呼び、ON状態を「第2モード」と呼ぶものとする。
【0030】
以下、このように構成された本実施形態に係る細胞操作観察装置10を用いた細胞操作及び観察方法について説明する。
【0031】
ここでは、ディッシュ16内の培養液中で培養される細胞に物質を導入する場合及びそのようにして物質が導入された細胞の観察を例に説明する。
【0032】
まず、細胞に物質を導入する場合について説明する。
即ち、図5に示すように、該細胞操作観察装置10の操作者は、まず、細胞操作を行うためのチップ駆動装置14の準備が済んでいるかどうか確認する(ステップTS1)。ここで、未だ準備が済んでいない場合には、装置本体50から取り外されているアダプタ62に、ニードル60を差し込み装着する(ステップTS1)。そして、顕微鏡アダプタ52を介してコンデンサレンズ42に装着されている装置本体50のアダプタ保持部64に対し、倒立型顕微鏡12の前面側から、そのニードル60が装着されたアダプタ62を装着する(ステップST3)。
【0033】
その後、チップ位置決めを行う(ステップST4)。即ち、操作者は、接眼レンズ48又はモニタ36で観察しながら、図示しない針位置調整ノブを操作して、目視により、ニードル60の先端に形成されているチップ部58の位置を、図示しない対物レンズの中央位置(視野中央位置)に設定する。これは、ディッシュホルダ20上にディッシュ16を載置せずに行う。
【0034】
こうしてチップ位置決めがなされたならば、或は、上記ステップST1でチップ駆動装置14が準備済であると確認した場合には、操作者は、次に、ディッシュホルダ20上へのディッシュ16の載置を行う(ステップST5)。なお、ディッシュ16は、当該ディッシュ16内の培養液中で培養される細胞に物質を導入するために、その導入しようとする物質を培養液に混濁した状態でセットされる。
【0035】
そして、モニタ36に表示された画像を確認しながらXYステージ操作用ジョイスティック28や操作モジュール54を操作して細胞操作・観察動作を実施することで、ディッシュ16内の所望の細胞に対して物質を導入する(ステップST6)。この細胞操作・観察動作は、操作者の上記操作に応じて制御コンピュータ38が、ディッシュホルダ移動コントローラ30、顕微鏡コントローラ32及びコントロールボックス56を介して、倒立型顕微鏡12及びチップ駆動装置14の各部を駆動制御することで行われるものであり、その詳細については後述する。
【0036】
そして、細胞への物質導入が終了したならば、ディッシュ16を回収する(ステップST7)。
【0037】
また、続けて別のディッシュ16にて培養された細胞に対して物質を導入する場合には、上記動作を繰り返すこととなる。この場合、既にチップ駆動装置14の準備が済んでいるので、上記ステップST1から上記ステップST5へ進むことができる。勿論、コンタミネーションの虞をなくすために、上記ステップST1から上記ステップST5に進むのではなく、上記ステップST2に進んで、ニードル60を交換するようにしても良い。
【0038】
上記ステップST7で回収されたディッシュ16は、上記導入しようとする物質が混濁された培養液が洗い流されて、新たな培養液が補充される。これにより、物質が導入された細胞が上記ディッシュ16内で更に培養される。そして、所定の期間をおいた後、細胞操作観察装置10を用いて観察される。
【0039】
この観察を行う場合には、チップ駆動装置14は必要としないので、上記ステップST1から上記ステップST5に進み、操作者は、その観察しようとする物質導入済細胞を培養しているディッシュ16を顕微鏡XYステージ26によって水平方向に移動されるディッシュホルダ20上へ載置する。
【0040】
そして、操作者は、モニタ36に表示された画像を確認しながらXYステージ操作用ジョイスティック28や操作モジュール54を操作して細胞操作・観察動作を実施することで、ディッシュ16内の所望の細胞を観察する(ステップST6)。
【0041】
そして、細胞の観察が終了したならば、ディッシュ16を回収する(ステップST7)。
【0042】
次に、上記ステップST6の細胞操作・観察動作を説明する。
【0043】
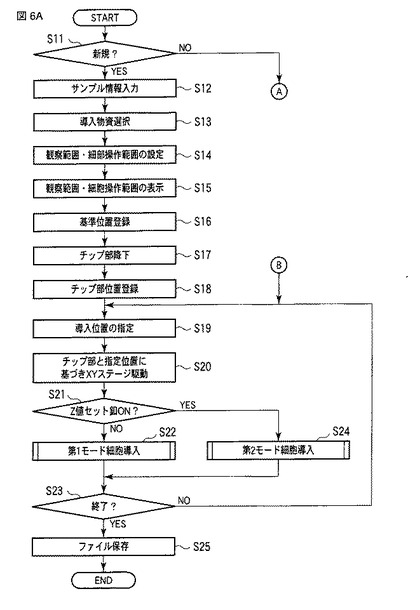
この細胞操作・観察動作は、制御コンピュータ38において、図6A及び図6Bに示すような動作を行う制御プログラムを実行することで実施される。
【0044】
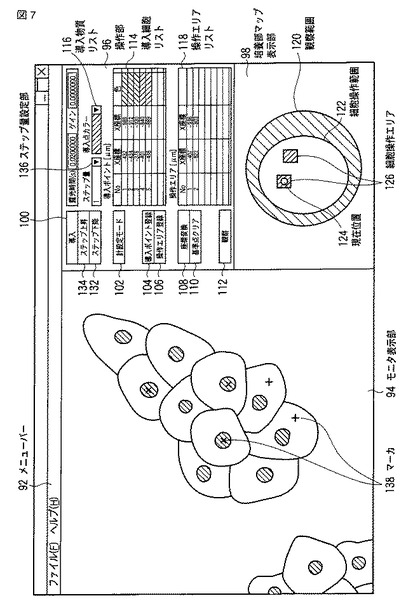
なお、該制御プログラムが起動されると、図7に示すような操作ウィンドウがモニタ36に表示される。この操作ウィンドウは、メニューバー92、CCDカメラ46で取得され画像処理装置34により処理された画像を表示するモニタ表示部94、各種操作ボタンやリスト表示を行う操作部96、及びモニタ表示部94がディッシュホルダ20に載置されたディッシュ16のどの部分を表示しているのかを示す培養器マップ表示部98を有している。
【0045】
操作部96は、操作ボタンとして、物質の導入を指示するための「導入」ボタン100、チップ部58の位置登録を指示するための「針設定モード」ボタン102、物質を導入する位置の登録を指示するための「導入ポイント登録」ボタン104、物質を導入する細胞を含むエリアの登録を指示するための「操作エリア登録」ボタン106、ディッシュ16の基準点の登録を指示するための「座標変換」ボタン108、その登録した基準点のクリアを指示するための「基準点クリア」ボタン110、観察を行うことを指示するための「観察」ボタン112、等を含む。
【0046】
更に、操作部96は、導入細胞リスト114を含む。この導入細胞リスト114は、上記「導入ポイント登録」ボタン104のマウスクリック操作に応じて細胞個々の導入細胞情報が登録される制御コンピュータ38の図示しない記憶部に構成された導入細胞リストの内容を表示するものである。ここで、導入細胞情報は、位置情報(XY座標)と導入物質情報とを含むもので、導入物質情報はモニタ表示部94への表示色、物質名称、粒子のサイズ、濃度、観察条件、等を含む。なお、導入する物質としては、細胞核、細胞質の何れに導入するものであっても良く、例えば、遺伝子、色素、量子ドットなどの蛍光試薬、イオン、ペプチド、タンパク質、多糖類、等、ディッシュ16内に混濁できるものであれば構わない。これらの導入する物質を導入物質リスト116よりプルダウンリストで選択可能なように、予め登録しておくことが好ましい。このような導入細胞リスト114を表示することで、細胞個々に、導入内容が把握できるようになる。
【0047】
更に、操作部96は、操作エリアリスト118を含む。この操作エリアリスト118は、上記「操作エリア登録」ボタン106のマウスクリック操作に応じて操作エリア情報が登録される制御コンピュータ38の図示しない記憶部に構成された操作エリアリストの内容を表示するものである。この操作エリア情報は、物質の導入を行う又は行った細胞を含むエリアの位置情報、例えば当該エリアの左上等の所定のポイントのXY座標を含む。なお、操作エリアのサイズは、モニタ表示部94に表示されている範囲に相当する。
【0048】
一方、培養器マップ表示部98は、細胞が培養されるディッシュ16の透孔88の開口面88a全体に相当する倒立型顕微鏡12で観察可能な範囲である観察範囲120と、その観察範囲120の内のチップ駆動装置14によって細胞操作可能な範囲である細胞操作範囲122とを、区別可能に表示し、モニタ表示部94が表示しているエリアを現在位置124として呈示する。また、上記操作エリアリスト118に登録表示されている各エリアを細胞操作エリア126として表示する。このように、現視野の観察像を表示するモニタ表示部94と観察範囲120及び現在位置124を表示する培養器マップ表示部98とを同一モニタ上に表示することで、今現在何処を観察しているのかを容易に把握できるようになる。
【0049】
そして、制御コンピュータ38は、まず、このような操作ウィンドウにおけるメニューバー92の「ファイル」項目のマウスクリック操作等で表示されるファイルメニューより新規ファイル作成が選択されたか否かを判別する(ステップS11)。
【0050】
ここで、新規ファイル作成が選択された場合には、別途図示しないサンプル情報入力ウィンドウを開き、サンプル情報の入力を受け付け、その入力されたサンプル情報を図示しない記憶部に記憶する(ステップS12)。このサンプル情報としては、日付、番号、細胞、等が含まれる。更に、ディッシュ16の種類やチップ駆動装置14の種類をプルダウンメニューから選択できるようになっている。
【0051】
こうしてサンプル情報が入力されたならば、次に、導入物質リスト116のプルダウンリストから導入物質の選択がなされる(ステップS13)。このとき、上記導入細胞リスト114やモニタ表示部94で識別表示するための表示色の設定や、物質名称、粒子のサイズ、濃度、観察条件等の入力が可能となっている。観察条件を入力しておくことにより、物質導入された細胞を後で観察しようとしたときに、その都度、観察条件を設定する必要を無くすことができる。このような導入物質の情報も図示しない記憶部に記憶される。
【0052】
その後、ディッシュホルダ移動コントローラ30により顕微鏡XYステージ26を駆動してディッシュホルダ20を水平方向に移動させ、ディッシュ16の外形を測定することで観察範囲及び細胞操作範囲を設定し、図示しない記憶部に記憶する(ステップS14)。例えば、観察範囲は、上記入力されたディッシュ16の種類に基づいて、ディッシュ16が円形であれば外周の3点、四角形であれば対角の2点を測定すれば、特定できる。なお、この測定は、画像処理によってCCDカメラ46で取得した画像より境界を検出することで自動的に行うことも可能であるし、操作者がXYステージ操作用ジョイスティック28を操作して上記2点又は3点を指定するようにしても良い。また、制御コンピュータ38には、ディッシュ16の種類とチップ駆動装置14の種類との組み合わせに応じた細胞操作範囲のリストが予め記憶されており、上記入力されたディッシュ16の種類及びチップ駆動装置14の種類に応じて細胞操作範囲を設定することができる。このようにして、容易に観察範囲及び細胞操作範囲を設定できる。そして、それら設定した観察範囲及び細胞操作範囲と、モニタ表示部94が表示している現在位置とを、培養器マップ表示部98に、観察範囲120、細胞操作範囲122及び現在位置124として表示する(ステップS15)。
【0053】
次に、基準位置の登録を受け付け、図示しない記憶部に記憶する(ステップS16)。これは、操作者が図示しないカーソルをモニタ表示部94の所望位置に合わせてマウスクリック操作により位置を指定して、「座標変換」ボタン108を操作すると、そのボタン操作に応じて上記指定位置を基準位置として登録するものである。この基準位置は2点、登録される。この登録された基準位置は、一旦回収された当該ディッシュ16を再度セットして観察する際の位置合わせ(座標変換やθテーブル18での回転駆動)に使用される。
【0054】
その後、操作者の操作モジュール54操作に応じて、コントロールボックス56を介してチップ駆動装置14のZ駆動部66を作動させ、チップ部58を細胞の上方から細胞に近接させていく(ステップS17)。操作者は、こうして、チップ部58をディッシュ16内の細胞と同焦で観察可能な位置まで降下させる。
【0055】
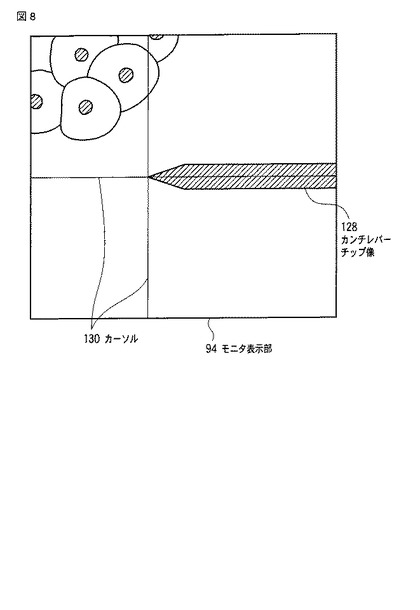
そして、チップ部58の位置を図示しない記憶部に登録する(ステップS18)。これは、操作者が、「針設定モード」ボタン102を操作した後、図8に示すように、モニタ表示部94に表示されたニードル60の画像(ニードル像128)の先端部にカーソル130を合わせてマウスクリック操作することでチップ部58の位置を指定すると、そのマウスクリック操作に応じて上記指定位置をチップ部58の位置として登録するものである。このようにして、チップ部58の位置を登録することができる。また、再度同様の操作を行うことで、迅速に位置の修正が行える。
【0056】
なお、操作者の位置指定を受ける代わりに、「針設定モード」ボタン102の操作に応じて、画像処理によりカンチレバーチップ像128の幾何学的形状により自動判別するようにしても構わない。即ち、カンチレバーチップ74の幾何学的形状から、細胞内にチップ部58を侵入させなくてもチップ部58の位置が容易に判別できる。
【0057】
その後、物質を導入する位置の指定を受け付ける(ステップS19)。これは、操作者がモニタ表示部94上で導入する細胞を選定し、カーソル130をその選定した細胞内の導入したい位置に重ね合わせ、マウスクリック操作すると、その操作に応じて上記位置を指定位置として受け付けるものである。なお、この細胞の選定は、操作者が、XYステージ操作用ジョイスティック28を操作して、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動することでディッシュ16を、チップ駆動装置14によって細胞導入を行う所定の細胞操作位置に移動させ、モニタ表示部94の画像を見ながら物質を導入する細胞を選定することにより行われる。この際、操作者は、培養器マップ表示部98における細胞操作範囲122及び現在位置124の表示を確認しながらXYステージ操作用ジョイスティック28を操作することで、シャフト76をディッシュ16にぶつけてしまうことを防止できる。
【0058】
また、フローチャートには示していないが、まず、上記のようにディッシュ16を移動させて「操作エリア登録」ボタン106の操作により細胞操作エリアを図示しない記憶部に設けた操作エリアリストに登録するという操作を繰り返し、後から、該記憶部の操作エリアリストの内容を表示している操作エリアリスト118上で所望の細胞操作エリアを選択してマウスダブルクリック操作により指定することで、当該細胞操作エリアの位置を細胞操作エリア126としてモニタ表示部94に表示させ、該細胞操作エリア内から、導入しようとする細胞を選定するといった指定方法も採ることができる。
【0059】
次に、制御コンピュータ38は、チップ部58の位置と上記指定位置との相対位置を算出し、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動して、上記指定位置がチップ部58の位置と重なる位置にディッシュ16を移動する(ステップS20)。
【0060】
その後の動作は、Z値をセットしているか否かにより異なる。
1回目のチップ駆動では、まだZ値をセットしていないので(ステップS21)、第1モード細胞導入動作を行う(ステップS22)。
【0061】
この第1モード細胞導入動作においては、操作者は、モニタ表示部94の画像を観察して「細胞の歪み」または「レバー部80の撓み」を確認しながら、操作モジュール54を操作し、制御コンピュータ38は、図9に示すように、その操作に応じてコントロールボックス56を介してZ駆動部66を駆動することで、チップ部58をZ方向に微少量ずつ下降させて行き、Z方向の最適位置を決める(ステップS22A)。このとき、操作モジュール54の操作は、該操作モジュール54に設けられた図示しない移動量設定ダイアルの大・中・小でその感度を適宜切り替えながら行うことなる。また、操作モジュール54の操作ではなく、操作部96に「ステップ下降」ボタン132及び「ステップ上昇」ボタン134とステップ量設定部136を設け、それらのマウスクリック操作によってZ駆動部66の駆動方向と駆動量を指示するようにしても良い。
【0062】
そして、このようにしてチップ部58を下降させディッシュ16の底面へ近づけていき、チップ部58の先端が下降していく途中において、ディッシュ16内の細胞に接触する。ここで、更にチップ部58を下降させていくと、チップ部58の先端が細胞内、即ち、細胞膜に及び核位置であれば核に、孔または傷をつける。こうして形成された孔または傷に、ディッシュ16内に混濁された物質を流通することにより、物質が細胞内に流入する。導入しようとする粒子のサイズ等によっては、孔または傷をつけなくてもチップ部58で細胞を変形させることによる物理的刺激でストレッチレセプター等に結合されたチャンネルが開くことによっても流入する。このとき、操作者が操作モジュール54の図示しないZ値セットボタンを押すと、その押下に応じて(ステップS22B)、制御コンピュータ38は、図示しない位置検出部で検出されるそのときのアダプタ保持部64の位置を最適位置を示すZ値として、図示しない記憶部に記憶する(ステップS22C)。
【0063】
その後、操作モジュール54の操作に応じて、ニードル60を上昇させることで、チップ部58を退避させる(ステップS22D)。
【0064】
なお、チップ部58を上昇させてチップ部58を細胞から引き抜いた後は、ある一定時間が経過すると、細胞膜は自己修復により回復し、細胞内に物質が取り込まれた状態となる。
【0065】
こうして物質が細胞に導入されたならば、操作者の「導入ポイント登録」104ボタンのマウスクリック操作に応じて、チップ部58の位置に対応する顕微鏡XYステージ26の座標値(導入位置情報)及び導入物質情報を、図示しない記憶部に設けた導入細胞リストの導入ポイントNo.1の情報に登録し、その登録内容を操作部96に導入細胞リスト114として表示する(ステップS22E)。このように、物質の導入動作に連動して導入位置情報及び導入物質情報が自動的に登録されるので、導入を試みた細胞の情報が確実に記録され、操作者の登録忘れが発生することがない。
【0066】
そして、モニタ表示部94に、導入ポイントNo.1の位置情報を指定の色でマーカ138として表示する(ステップS22F)。このマーカ138は、顕微鏡XYステージ26の移動に伴い、常に導入ポイントNo.1の位置に表示される。即ち、予めチップ部58の位置を登録しておくことで、チップ部58と導入細胞位置とを相対的に位置決めすることが可能となるので、導入した細胞が判別され、なおかつ細胞内のどの位置に物質を導入したのかを示すマーカ138を精度良く表示することができるようになる。
【0067】
以下、任意の細胞個々に対して物質の導入を繰り返し行う。
即ち、メニューバー92の「ファイル」項目のマウスクリック操作等で表示されるファイルメニューより終了が選択される等の所定の終了指示がなされたか否かを判別し(ステップS23)、そのような終了指示がなければ、上記ステップS19に戻って、上述した動作を繰り返す。
【0068】
この場合、2回目からのチップ駆動では、図示しない記憶部にZ値をセットしているので(ステップS21)、第2モード細胞導入動作を実施することになる(ステップS24)。
【0069】
この場合には、Z値が図示しない記憶部にセットされているので、XY水平方向を位置決めした後は、操作モジュール54による行き過ぎた操作を気にせずに、チップ部58を十分下降させる操作をするだけで、最適位置まで下降させることができる。即ち、図9に示すように、操作者による「導入」ボタン100の操作に応じて(ステップS24A)、制御コンピュータ38は、コントロールボックス56を介してZ駆動部66を駆動してチップ部58を下降させていき、図示しない位置検出部で検出したアダプタ保持部64の位置と図示しない記憶部にセットされているZ値とを比較して、アダプタ保持部64(チップ部58)が上記Z値の位置に到達するまで、チップ部58を下降させる(ステップS24B)。
【0070】
その後は、上記ステップS22Dに進み、操作モジュール54の操作に応じて、ニードル60を上昇させることで、チップ部58を退避させる。こうして物質が細胞に導入されたならば、自動的に、チップ部58の位置に対応する顕微鏡XYステージ26の座標値及び導入物質情報を、図示しない記憶部に設けた導入細胞リストの導入ポイントNo.nの情報に登録し、その登録内容を操作部96に導入細胞リスト114として表示する(ステップS22E)。勿論、1回目のチップ駆動と同様に、操作者の「導入ポイント登録」104ボタンのマウスクリック操作に応じて、導入細胞リストに登録するようにしても構わない。そして、モニタ表示部94に、導入ポイントNo.nの位置情報を指定の色でマーカ138として表示する(ステップS22F)。このマーカ138は、顕微鏡XYステージ26の移動に伴い、常に導入ポイントNo.nの位置に表示される。
【0071】
こうして、当該ディッシュ16内の所望の細胞個々に対して物質の導入が終了したならば、操作者が上述した所定の終了指示を行うため、そのような終了指示がなされたならば(ステップS23)、図示しない記憶部に記憶したサンプル情報、導入物質、基準位置、操作エリアリスト、導入細胞リスト、等の情報をファイルとして、任意のファイル名で図示しない記憶部に保存すると共に、上記サンプル情報、導入物質、基準位置、操作エリアリスト、導入細胞リスト、等の情報を該記憶部から削除する(ステップS25)。
【0072】
一方、上記のようにして或る物質を導入したディッシュ16に対して、別の物質を更に導入する場合がある。そのような場合には、上記ステップST7で一旦回収したディッシュ16から、その中の導入物質が混濁された培養液を洗い流し、今回の導入物質を混濁した培養液に置換した後、上記ステップST5で再びディッシュホルダ20上へ載置する。
【0073】
そして、操作者は、上記操作ウィンドウにおけるメニューバー92の「ファイル」項目のマウスクリック操作等で表示されるファイルメニューより、上記ステップS25で保存したファイルを読み出す操作を行う。
【0074】
即ち、制御コンピュータ38は、ファイルメニューより新規ファイル作成が選択されない場合には(ステップS11)、ファイルの選択を受け付け(ステップS26)、その選択されたファイルよりサンプル情報を読み出して図示しない記憶部に記憶する(ステップS27)。
【0075】
その後、操作部96の「観察」ボタン112がマウスクリック操作されたか否かを判別する(ステップS28)。「観察」ボタン112が操作されない場合、上記ステップS13と同様にして、導入物質リスト116のプルダウンリストから導入物質の選択がなされる(ステップS29)。
【0076】
その後、基準位置の登録を受け付け、図示しない記憶部に記憶する(ステップS30)。これは、操作者がカーソルをモニタ表示部94の上記ステップS16で指定したのと同一位置に合わせてマウスクリック操作により位置を指定して、「座標変換」ボタン108を操作することで、制御コンピュータ38は、そのボタン操作に応じて上記指定位置を今回の基準位置として登録するものである。この基準位置は、上記ステップS16と同様に、2点、登録する。そして、この登録された今回の基準位置の座標値と上記選択されたファイルより読み出した前回登録した基準位置の座標値との差分から、上記選択されたファイルより読み出した導入細胞リスト及び操作エリアリストにおける各座標値を現在のディッシュ16の載置状態に応じた座標値に変換して、記憶部に記憶する(ステップS31)。なお、このように座標値を変換することで位置合わせを行う代わりに、ディッシュホルダ移動コントローラ30を介してθテーブル18を回転させたり顕微鏡XYステージ26を駆動させたりして、前回登録した基準位置の座標値に合致するようにディッシュ16を移動させて、位置合わせを行うようにしても良い。このように、座標変換又はディッシュ16の移動により位置合わせを行うことで、ディッシュ16を再配置後に物質を導入した細胞の位置を再現することが可能となる。
【0077】
次に、上記選択されたファイルから読み出した観察範囲及び操作範囲の情報に従って、培養器マップ表示部98に、観察範囲120及び細胞操作範囲122を表示すると共に、モニタ表示部94が表示している現在位置を現在位置124として表示する(ステップS32)。また、上記記憶部に記憶した操作エリアリストに従って、培養器マップ表示部98に、導入済の細胞操作エリア126を表示する(ステップS33)。
【0078】
その後、上記ステップS17と同様にして、チップ部58を細胞の上方から細胞に近接させていき(ステップS34)、上記ステップS18と同様にして、チップ部58の位置を記憶部に登録する(ステップS35)。またこのとき、上記記憶部に記憶した導入細胞リストに従って、モニタ表示部94に表示されるCCDカメラ46で取得した細胞の画像上に、前回導入した導入ポイントの位置情報を指定の色でマーカ138として表示する(ステップS36)。このマーカ138は、顕微鏡XYステージ26でのディッシュホルダ20の水平移動によるディッシュ16の移動に伴い、常に導入ポイントの位置に表示される。
【0079】
その後は、上記ステップS19に進み、上述したような動作を実行する。
【0080】
こうして、複数種類の導入物質を導入することができる。図7は、2種類の導入物質を導入した場合のモニタ表示部94の表示例を示している。この場合、マーカ138は、導入物質毎に異なる色で表示される。なお、図7では、色の違いをマーカ138の形状の違いで示しているが、実際には同一形状のマーカ138で色のみが異なるものとする。勿論、この図に示すように、色ではなくてマーカ138の形状で導入物質を区別可能に表示することも可能である。その場合には、導入細胞リスト114における「色」の項目が「マーカ形状」項目となり、マーカ形状を示すものに変更され、また導入物質リスト116も色ではなくてマーカ形状のリストとなる。
【0081】
次に、観察を行う場合の細胞操作・観察動作を説明する。
この観察を行う場合には、操作部96の「観察」ボタン112がマウスクリック操作され、上記ステップS28において、それが判別される。そして、その場合には、操作者による観察倍率の選定に応じて、顕微鏡コントローラ32を介して観察倍率を設定する(ステップS37)。即ち、物質導入に関しては固定の倍率で構わないが、観察に関しては種々の倍率で観察を行うことが想定されるので、操作者の要求に応じた観察倍率を設定する。
【0082】
そしてその後、上記ステップS30と同様にして、基準位置の登録を受け付け、図示しない記憶部に記憶する(ステップS38)。そして、これにより登録された今回の基準位置の座標値と上記選択されたファイルより読み出した登録されている基準位置の座標値との差分から、上記選択されたファイルより読み出した導入細胞リスト及び操作エリアリストにおける各座標値を現在のディッシュ16の載置状態に応じた座標値に変換して、記憶部に記憶する(ステップS39)。或は、ディッシュホルダ移動コントローラ30を介してθテーブル18を回転させたり顕微鏡XYステージ26を駆動させたりして、登録されている基準位置の座標値に合致するようにディッシュ16を移動させても良い。
【0083】
次に、上記ステップS32と同様にして、培養器マップ表示部98に、観察範囲120、細胞操作範囲122及び現在位置124を表示する(ステップS40)。また、上記ステップS33と同様にして、培養器マップ表示部98に、導入済の細胞操作エリア126を表示する(ステップS41)。そして、上記ステップS36と同様にして、モニタ表示部94に、導入済の導入ポイントの位置情報を指定の色でマーカ138として表示する(ステップS42)。このマーカ138は、顕微鏡XYステージ26の駆動によるディッシュ16の移動に伴い、常に導入ポイントの位置に表示される。
【0084】
その後、操作者によって、操作部96の導入細胞リスト114から所望の導入細胞が選択されてマウスがダブルクリック操作されることで、観察対象の細胞が選択されると(ステップS43)、制御コンピュータ38は、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動して、その選択された細胞の位置にディッシュ16を移動させることで、選択された導入済み細胞をモニタ表示部94に表示すると共に、顕微鏡コントローラ32を介して上記選択されたフィルから読み出した観察条件の情報に基づいて倒立型顕微鏡12を設定し、観察を開始させる(ステップS44)。このように、観察条件を登録しておくことで、自動観察が可能となる。なお、この観察時に、観察条件を適宜変更できるようになっていることは言うまでもない。また、導入細胞リスト114から選択するだけで導入細胞位置へディッシュ16が移動されて、迅速に観察が進められる。勿論、導入細胞リスト114からの選択だけでなく、操作エリアリスト118からの選択でも、同様の動作が可能である。同一エリアで複数の観察条件がある場合、それぞれ順次実行する。
【0085】
そして、操作者によって上述した所定の終了指示がなされたか否かを確認し(ステップS45)、そのような終了指示がなされていない場合には、別の細胞を観察するものとして、上記ステップS43に戻る。
【0086】
而して、所定の終了指示がなされたならば(ステップS45)、図示しない記憶部に記憶したサンプル情報、導入物質(変更された観察条件を含む)、基準位置、操作エリアリスト、導入細胞リスト、等の情報をファイルとして、任意のファイル名で図示しない記憶部に保存すると共に、上記サンプル情報、導入物質、基準位置、操作エリアリスト、導入細胞リスト、等の情報を該記憶部から削除する(ステップS46)。
【0087】
[第2実施形態]
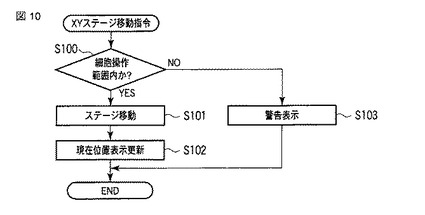
本発明の第2実施形態に係る細胞操作観察装置10においては、XYステージ操作用ジョイスティック28の操作、モニタ表示部94のマウスクリック操作、導入ポイント選択のためのマウスクリック操作、細胞操作エリア選択のためのマウスクリック操作、等に応じて、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動する際には、図10に示すようなXYステージ移動指令動作を実行する。
【0088】
即ち、まず、その移動先位置が細胞操作範囲内か否かを判別し(ステップS100)、細胞操作範囲内であれば、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動してディッシュホルダ20を水平移動することでディッシュ16を移動させる(ステップS101)。そして、培養器マップ表示部98における現在位置124の表示を更新する(ステップS102)。
【0089】
これに対して、上記ステップS100において移動先位置が細胞操作エリア内でないと判別した場合には、顕微鏡XYステージ26を駆動することなく、モニタ36上に警告表示灯を行う(ステップS103)。
【0090】
上記第1実施形態では、操作者が培養器マップ表示部98に表示された細胞操作範囲122及び現在位置124を確認しながら、シャフト76がディッシュ16にぶつからないように顕微鏡XYステージ26の移動指示を行うようにしていたが、本第2実施形態では、顕微鏡XYステージ26の移動前に細胞操作範囲と移動先位置との比較を行い、移動先位置が細胞操作範囲をオーバーする場合には移動しないようにすることで、操作者の負担を軽減することができる。
【0091】
以上実施形態に基づいて本発明を説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形や応用が可能なことは勿論である。
【0092】
例えば、図7に示した操作ウィンドウは一例であり、モニタ表示部94、操作部96及び培養器マップ表示部98の配列はこれに限定されるものではない。また、操作部96のボタンやリストの表示も、これに限定されるものではない。
【0093】
(付記)
前記の具体的実施形態から、以下のような構成の発明を抽出することができる。
【0094】
(1) 細胞へ物質を導入して観察する細胞操作観察装置において、
細胞を培養する培養器を水平方向に移動可能に載置するステージと、
上記ステージに載置された上記培養器内の細胞を撮像して表示する観察手段と、
上記観察手段によって観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する図表示手段と、
上記ステージに載置された上記培養器内の細胞の内、物質の導入を行う細胞の位置を指定する指定手段と、
上記ステージを駆動して、上記指定手段によって指定された位置を上記観察手段の視野内の所定の細胞操作位置に配置する導入位置配置手段と、
上記導入位置配置手段によって上記所定の細胞操作位置に移動された細胞の細胞膜を細胞操作ツールによって穿孔することで、上記培養器内の培養液中に混濁させた導入物質を上記細胞に導入する細胞操作手段と、
を具備することを特徴とする細胞操作観察装置。
【0095】
(対応する実施形態)
この(1)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、細胞操作観察装置10が上記細胞操作観察装置に、ディッシュ16が上記培養器に、ディッシュホルダ20、XYステージ26が上記ステージに、観察装置24、画像処理装置34、モニタ36、制御コンピュータ38が上記観察手段に、観察範囲120が上記観察範囲に対応する図に、細胞操作範囲122が上記細胞操作範囲に、現在位置124が上記現在観察している位置に、培養器マップ表示部98が上記図表示手段に、制御コンピュータ38が上記指定手段に、チップ部58の位置が上記所定の細胞操作位置に、XYステージ操作用ジョイスティック28、ディッシュホルダ移動コントローラ30、制御コンピュータ38が上記導入位置配置手段に、ニードル60が上記細胞操作ツールに、チップ駆動装置14、制御コンピュータ38、操作モジュール54、コントロールボックス56が上記細胞操作手段に、それぞれ対応する。
【0096】
(作用効果)
この(1)に記載の細胞操作観察装置によれば、観察範囲を示す図に細胞操作範囲と現在位置とを重ね合わせて表示することで、現在位置が細胞操作範囲を外れないように操作可能となるので、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすことが可能な細胞操作観察装置を提供することができる。
【0097】
(2) 上記培養器の種類と上記細胞装置手段の種類とに応じた細胞操作範囲のリストを記憶する記憶手段と、
上記培養器の種類と上記細胞装置手段の種類とを指定する種類指定手段と、
を更に具備し、
上記図表示手段は、上記種類指定手段によって指定された上記培養器及び上記細胞装置手段の種類に従って上記記憶手段に記憶された上記リストより上記細胞操作範囲を読み出して表示することを特徴とする(1)に記載の細胞操作観察装置。
【0098】
(対応する実施形態)
この(2)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、制御コンピュータ38が上記記憶手段に、制御コンピュータ38が上記種類指定手段に、それぞれ対応する。
【0099】
(作用効果)
この(2)に記載の細胞操作観察装置によれば、培養器の種類と細胞装置手段の種類(細胞操作ツールの種類)とを指定するだけで、容易に細胞操作範囲を設定できる。
【0100】
(3) 上記ステージに載置された上記培養器の形状を測定する測定手段を更に具備し、
上記図表示手段は、上記測定手段によって測定された上記培養器の形状に基づいて上記ステージ上での観察位置を特定して上記図を表示することを特徴とする(2)に記載の細胞操作観察装置。
【0101】
(対応する実施形態)
この(3)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、顕微鏡XYステージ26、ディッシュホルダ移動コントローラ30、制御コンピュータ38が上記測定手段に対応する。
【0102】
(作用効果)
この(3)に記載の細胞操作観察装置によれば、培養器の形状を測定することで、容易に観察範囲を設定できる。
【0103】
(4) 上記観察手段による細胞の表示と上記図表示手段による図の表示とは、同一のモニタ上に行われることを特徴とする(1)に記載の細胞操作観察装置。
【0104】
(対応する実施形態)
この(4)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。
【0105】
(作用効果)
この(4)に記載の細胞操作観察装置によれば、観察手段による細胞の表示と図表示手段による図の表示とを同一のモニタ上に行うことで、今現在何処を観察しているのかを容易に把握できるようになる。
【0106】
(5) 上記導入位置配置手段は、上記指定手段によって指定された位置と上記細胞操作範囲とを比較し、上記指定された位置が上記細胞操作範囲をオーバーするときには、上記ステージの駆動を行わないことを特徴とする(1)に記載の細胞操作観察装置。
【0107】
(対応する実施形態)
この(5)に記載の細胞操作観察装置に関する実施形態は、第2実施形態が対応する。
【0108】
(作用効果)
この(5)に記載の細胞操作観察装置によれば、操作者の負担を軽減することができ、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を確実に防止できる。
【0109】
(6) 上記細胞操作手段による細胞への導入物質の導入動作に連動して、その時点で上記観察手段によって観察しているエリアを細胞操作エリアとして記憶する記憶手段を更に具備し、
上記図表示手段は、更に、上記記憶手段に記憶した上記細胞操作エリアを上記観察範囲に対応する図に重ね合わせて表示することを特徴とする(1)に記載の細胞操作観察装置。
【0110】
(対応する実施形態)
この(6)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、制御コンピュータ38が上記記憶手段に、細胞操作エリア126が上記観察範囲に対応する図に重ね合わせて表示される細胞操作エリアに、それぞれ対応する。
【0111】
(作用効果)
この(6)に記載の細胞操作観察装置によれば、細胞操作を行ったエリアを確実に記録でき、把握することができる。
【図面の簡単な説明】
【0112】
【図1】図1は、本発明の第1実施形態に係る細胞操作観察装置を示す全体構成図である。
【図2】図2(A)は、チップ駆動装置のアダプタの取り付けに関する構成を示す図であり、図2(B)は、ニードルの構成を示す図である。
【図3】図3(A)は、ニードルの角度による干渉を説明するための図であり、図3(B)は、可動範囲を説明するための図である。
【図4】図4(A)及び(B)は、ガラスベースディッシュの上面図及び断面図であり、図4(C)はガラスベースディッシュの場合の可動範囲を説明するための図である。
【図5】図5は、第1実施形態に係る細胞操作観察装置を用いた細胞操作及び観察方法の流れを説明するためのフローチャートを示す図である。
【図6A】図6Aは、制御コンピュータによる細胞操作・観察動作の制御プログラムを説明するための一連のフローチャートの前半部分を示す図である。
【図6B】図6Bは、制御コンピュータによる細胞操作・観察動作の制御プログラムを説明するための一連のフローチャートの後半部分を示す図である。
【図7】図7は、モニタに表示される操作ウィンドウの一例を示す図である。
【図8】図8は、チップ部の位置指定を行う際のモニタ表示部の表示例を示す図である。
【図9】図9は、第1モード細胞導入動作及び第2モード細胞導入動作のフローチャートを示す図である。
【図10】図10は、本発明の第2実施形態に係る細胞操作観察装置におけるXYステージ移動指令動作のフローチャートを示す図である。
【符号の説明】
【0113】
10…細胞操作観察装置、 12…倒立型顕微鏡、 14…チップ駆動装置、 16…ディッシュ、 18…θテーブル、 20…ディッシュホルダ、 22…照明装置、 24…観察装置、 26…顕微鏡XYステージ、 28…XYステージ操作用ジョイスティック、 30…ディッシュホルダ移動コントローラ、 32…顕微鏡コントローラ、 34…画像処理装置、 36…モニタ、 38…制御コンピュータ、 40…透過照明光源、 42…コンデンサレンズ、 44…落射照明光源、 46…CCDカメラ、 48…接眼レンズ、 50…装置本体、 52…顕微鏡アダプタ、 54…操作モジュール、 56…コントロールボックス、 58…チップ部、 60…ニードル、 62…アダプタ、 64…アダプタ保持部、 66…Z駆動部、 68…Z駆動部取付部、 70…マグネット、 72…嵌合部、 74…カンチレバーチップ、 76…シャフト、 78…シリコンベース部、 80…レバー部、 82…可動範囲、 84…底板部、 84a…下面、 86…周側部、 88…透孔、 88a…開口面、 90…板状ガラス部、 92…メニューバー、 94…モニタ表示部、 96…操作部、 98…培養器マップ表示部、 100…「導入」ボタン、 102…「針設定モード」ボタン、 104…「導入ポイント登録」ボタン、 106…「操作エリア登録」ボタン、 108…「座標変換」ボタン、 110…「基準点クリア」ボタン、 112…「観察」ボタン、 114…導入細胞リスト、 116…導入物質リスト、 118…操作エリアリスト、 120…観察範囲、 122…細胞操作範囲、 124…現在位置、 126…細胞操作エリア、 128…カンチレバーチップ像、 130…カーソル、 132…「ステップ下降」ボタン、 134…「ステップ上昇」ボタン、 136…ステップ量設定部、 138…マーカ、 S…接着剤。
【技術分野】
【0001】
本発明は、細胞へ遺伝子等の物質を導入して観察する細胞操作観察装置に関する。
【背景技術】
【0002】
特許文献1には、操作する細胞を顕微鏡視野下で選定し、その座標値を記録すると共に、基準点2点を設け、座標変換することにより、培養器を再配置しても、導入細胞の位置が再現できる細胞位置教示方法および単一細胞操作支援ロボットが開示されている。これにより、顕微鏡視野内の細胞をモニタ表示を見ながら任意に選定し、細胞操作を行うことができる。
【0003】
また、特許文献2には、培養器に対応した図が表示されるとともに、観察中の現在のカメラ位置および移動したい位置、および、過去に観察した位置の記録が表示される培養装置が開示されている。これにより、操作者は、培養器中のどの位置を観察しているのかを、モニタ表示により確認することができる。
【特許文献1】特開2005−326341号公報
【特許文献2】特開2006−141326号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
一般的に培養器は、顕微鏡視野範囲に対して大きい領域を有し、また、細胞を溶液中に浸して培養する都合上、周囲が側壁で覆われている。このため、細胞を操作する細胞操作ツール、もしくは、培養器を載置する顕微鏡ステージを不用意に動かすと、細胞操作ツールと培養器とが干渉し、細胞操作ツールを培養器内の細胞にぶつけてしまい、細胞にダメージを与えてしまうことがある。
【0005】
しかるに、上記特許文献1の技術では、培養器のごく一部の顕微鏡視野内を表示するのみであるため、操作者が、培養器中のどの位置で細胞操作を行っているのか把握しにくく、細胞操作ツールを細胞にぶつけてしまう危険性がある。
【0006】
また、上記特許文献2の技術においても、細胞操作を行う際に、干渉することなく安全に操作が行える範囲は、細胞操作ツールの形状、培養器の形状によって異なるため、培養器に対応した図を表示しただけでは把握しにくく、やはり、細胞操作ツールを細胞にぶつけてしまう危険性が残されている。
【0007】
本発明は、上記の点に鑑みてなされたもので、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすことが可能な細胞操作観察装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の細胞操作観察装置の一態様は、細胞へ物質を導入して観察する細胞操作観察装置において、
細胞を培養する培養器を水平方向に移動可能に載置するステージと、
上記ステージに載置された上記培養器内の細胞を撮像して表示する観察手段と、
上記観察手段によって観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する図表示手段と、
上記ステージに載置された上記培養器内の細胞の内、物質の導入を行う細胞の位置を指定する指定手段と、
上記ステージを駆動して、上記指定手段によって指定された位置を上記観察手段の視野内の所定の細胞操作位置に配置する導入位置配置手段と、
上記導入位置配置手段によって上記所定の細胞操作位置に移動された細胞の細胞膜を細胞操作ツールによって穿孔することで、上記培養器内の培養液中に混濁させた導入物質を上記細胞に導入する細胞操作手段と、
を具備することを特徴とする。
【発明の効果】
【0009】
本発明によれば、観察範囲を示す図に細胞操作範囲と現在位置とを重ね合わせて表示することで、現在位置が細胞操作範囲を外れないように操作可能となるので、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすことが可能な細胞操作観察装置を提供することができる。
【発明を実施するための最良の形態】
【0010】
以下、本発明を実施するための最良の形態を図面を参照して説明する。
【0011】
[第1実施形態]
本発明の第1実施形態に係る細胞操作観察装置10は、図1に示すように、細胞を観察するための倒立型顕微鏡12と、それに取り付けられるチップ駆動装置14とかを含む。
【0012】
倒立型顕微鏡12は、細胞を培養する培養器であるディッシュ16を載置するθテーブル18を備えるディッシュホルダ20と、該ディッシュホルダ20上の細胞を照明する照明装置22と、細胞において反射あるいは透過した光、あるいは細胞から発生した蛍光を観察する観察装置24と、上記ディッシュホルダ20をX方向及びY方向に移動する顕微鏡XYステージ26と、該顕微鏡XYステージ26の移動を指示するためのXYステージ操作用ジョイスティック28と、該XYステージ操作用ジョイスティック28からの指示に従って上記顕微鏡XYステージ26及び上記θテーブル18を駆動制御するディッシュホルダ移動コントローラ30と、上記照明装置22及び観察装置24を制御する顕微鏡コントローラ32と、上記観察装置24により得られた画像を処理する画像処理装置34と、該画像処理装置34により処理された画像を表示するモニタ36を備え、上記ディッシュホルダ移動コントローラ30及び上記顕微鏡コントローラ32を介して該倒立型顕微鏡12の全体を制御する制御コンピュータ38と、を備えている。
【0013】
また、上記照明装置22には、細胞に対して、上記観察装置24とは反対側から照明光を照射する透過照明光源40と、該透過照明光源40から発せられた照明光を細胞に集光するコンデンサレンズ42と、細胞に対して上記観察装置24と同一方向から照明光を照射する落射照明光源44とが備えられている。
【0014】
一方、上記観察装置24には、図示しない対物レンズを含む観察光学系と、該観察光学系を介した細胞からの光を撮像して画像を取得するCCDカメラ46と、細胞からの光を直接観察する接眼レンズ48とが備えられている。
【0015】
そして、本実施形態に係るチップ駆動装置14は、装置本体50と、該装置本体50のコンデンサレンズ42への取り付け部である顕微鏡アダプタ52と、任意の位置に設置可能な操作モジュール54と、該操作モジュール54の操作に従って装置本体50を制御するコントロールボックス56から構成されている。なお、コントロールボックス56は、上記ディッシュホルダ移動コントローラ30を介して上記制御コンピュータ38に接続され、該制御コンピュータ38によって操作本体50を制御可能に構成されている。また、図1では、装置本体50を、接眼レンズ48が設けられた側である倒立型顕微鏡12の前面側に対し、コンデンサレンズ42の右側に装着した状態を示している。
【0016】
装置本体50は、駆動対象であるチップ部58を備える細胞操作ツールとしてのニードル60を装着したアダプタ62を取り付けるためのアダプタ保持部64と、該アダプタ保持部64をZ方向に移動することで上記チップ部58をZ方向に移動させるZ駆動部66と、上記アダプタ保持部64をX方向及びY方向に移動することで上記チップ部58のXY位置を調整する針位置調整ノブ(図示せず)と、を備えている。
【0017】
ここで、アダプタ保持部64には、図2(A)に示すように、Z駆動部66の図示しない直線移動機構に、図示しないXY駆動機構(コントロールボックス56はこの駆動機構によりアダプタ保持部64を駆動する)を介して取り付けるためのZ駆動部取付部68とは長手方向反対側に、上記アダプタ62を着脱自在に装着するための装着部材、例えばアダプタ62が金属製ないしは対応する箇所に金属部を設けたものであればマグネット70、が設けられている。なお、図2(A)において、一点鎖線の右側が装置本体50内に収容される部分である。即ち、上記マグネット70は、装置本体50外部となる位置に設けられている。また、このマグネット70の近傍に、アダプタ62の位置決めのために、アダプタ62に設けられた穴や溝に嵌合する嵌合部72が配設されている。嵌合部72は、倒立型顕微鏡12の前面側に向けて突出しており、アダプタ62がこの前面側から差し込みにより装着できるようになっている。
【0018】
なお、装置本体50がコンデンサレンズ42の左側に装着された際にもアダプタ62を装着できるように、マグネット70及び嵌合部72をアダプタ保持部64の裏面側にも設けても良い。あるいは、装置本体50の装着位置に応じて、アダプタ保持部64を交換可能に構成しても良い。
【0019】
上記アダプタ62に装着されるニードル60は、図2(B)に示すように、チップ部58を形成したカンチレバーチップ74を、該カンチレバーチップ74を保持するためのシャフト76の先端に接着して構成されている。カンチレバーチップ74は、シリコンプロセスにより製造されるもので、他の部分との接着用のシリコンベース部78と、該シリコンベース部78から延在し、例えば厚み2.7μm、長さ240μmで2N/m程度の弾性定数を持つ可撓性のレバー部80と、該レバー部80の自由端に、該レバー部80の長手方向に対しておおむね90度の角度で形成された上記チップ部58とからなる。
【0020】
本実施形態におけるチップ駆動装置14では、上記ニードル60をアダプタ62に空けられた図示しない穴に挿入・固定し、その後、該ニードル60を装着したアダプタ62を装置本体50に装着するようになっている。こうすることで、基本的に交換品度の高い構成品(消耗品)であるニードル60を交換することができ、コンタミネーションの虞なく、該チップ駆動装置14を繰り返し使用することができる。
【0021】
また、細長いニードル60を装置本体50に直接装着する構成とすると、作業性が悪く、装着作業時にチップ部58がディッシュホルダ20等の倒立型顕微鏡12の何処かに当たって破損してしまう虞がある。本実施形態では、装置本体50から取り外したアダプタ62にニードル60を装着した上で、該アダプタ62を装置本体50の前面側から装着するようにしているので、そのような破損の虞を少なくすることができる。
【0022】
なお、アダプタ62は、装置本体50に装着された際に、ニードル60のシャフト76を所定の角度で斜め下方に向けて保持するように構成されており、また、カンチレバーチップ74はこのシャフト76に対して所定の角度となるように接着されている。また、上記したようにチップ部58は、レバー部80の長手方向に対して交差する方向に延びるように設けられている。従って、アダプタ62が装置本体50に装着された状態では、チップ部58は、レバー部80の自由端において、先端をほぼ鉛直下方に向けて保持されることとなる。
【0023】
上記アダプタ62がシャフト76を保持する固定角度については、以下のようにして決められている。即ち、図3(A)に示すように、シャフト76を起き上げ過ぎると、コンデンサレンズ42に干渉してしまう。ニードル60の長さを例えば約50mmとすると、シャフト76を60度よりも起き上げるとコンデンサレンズ42に干渉してしまう。また逆に、シャフト76を寝かし過ぎると、ディッシュ16の周壁部に干渉してしまう。一般に、細胞培養で使用される頻度の高い35mmガラスボトムディッシュでは、30度よりも寝かすとディッシュ16の周壁部に干渉してしまう。従って、本実施形態では、30度乃至60度の中間である45度に設定している。
【0024】
アダプタ62によりシャフト76を45度の角度で保持するように設定した場合、図3(B)に一点鎖線で示すような可動範囲82が得られ、上記35mmガラスボトムディッシュのガラス面(φ14mm程度)は、コンデンサレンズ42やディッシュ16の周壁部に干渉することなく作業が行える。
【0025】
このように、アダプタ62がシャフト76を保持する固定角度は、コンデンサレンズ42と使用するディッシュ16への干渉を考慮して、ニードル60に十分な可動範囲82を与えるように決定している。そして、アダプタ62には、ニードル60を挿入・固定するため図示しない穴が、この固定角度でシャフト76を保持するような角度を持って形成されている。
【0026】
なお、上記ディッシュ16として使用されるガラスベースディッシュは、図4(A)及び(B)に示すように、ポリスチレンなどの合成樹脂材からなる底板部84と周側部86とで円筒状に形成されており、その底板部84の中心部位には、円形を呈する透孔88が1個穿設されている。そして、底板部84には、下面84a側から透孔88の開口面88aを完全に覆うに足る板状ガラス部90がシリコン系接着剤やアクリレート系接着剤などからなる接着剤Sを介して接合されており、該板状ガラス部90により透孔88の開口面88aの全体が遮蔽されている。こうして、底板部84と板状ガラス部90とによって、ディッシュ16の底部が構成される。
【0027】
このような構造を持つディッシュ16では、図4(C)に示すように、シャフト76がディッシュ16の底板部84に干渉することなくニードル60を移動させることができる可動範囲82は、透孔88の開口面88aよりも狭い範囲に制限されてしまう。この可動範囲82は、シャフト76の径やカンチレバーチップ74の長さ等によって変化する。なお勿論、θテーブル18を備えることで、該θテーブル18を駆動してディッシュ16を回転させることによって、このディッシュ16の底板部84との干渉による制限に関しては回避可能である。
【0028】
このように、本実施形態に係る細胞操作観察装置10では、倒立型顕微鏡12で観察可能な範囲である観察範囲は、細胞が培養されるディッシュ16の透孔88の開口面88a全体であるのに対して、チップ駆動装置14によって細胞操作可能な範囲である細胞操作範囲は、上記可動範囲82となり、観察範囲と細胞操作範囲とが異なることとなる。
【0029】
一方、チップ駆動装置14の操作モジュール54は、特に図示しないが、Z値セットボタンを備えている。このZ値セットボタンは、Z方向任意の位置を記憶する指示を行うためのボタンであり、上記Z駆動部66によるアダプタ保持部64のZ方向への駆動操作を該操作モジュール54で行っても、このZ値セットボタンにより記憶された位置よりも下(ディッシュ16内の細胞の方向)にはアダプタ保持部64が下降しないようにするものである。なお、このZ値セットボタンは、ラッチ機構を備えており、操作者が押下操作即ちON操作すると、再度押下操作されるまで、その押下状態即ちON状態を維持する。以降、Z値セットボタンがOFF状態を「第1モード」と呼び、ON状態を「第2モード」と呼ぶものとする。
【0030】
以下、このように構成された本実施形態に係る細胞操作観察装置10を用いた細胞操作及び観察方法について説明する。
【0031】
ここでは、ディッシュ16内の培養液中で培養される細胞に物質を導入する場合及びそのようにして物質が導入された細胞の観察を例に説明する。
【0032】
まず、細胞に物質を導入する場合について説明する。
即ち、図5に示すように、該細胞操作観察装置10の操作者は、まず、細胞操作を行うためのチップ駆動装置14の準備が済んでいるかどうか確認する(ステップTS1)。ここで、未だ準備が済んでいない場合には、装置本体50から取り外されているアダプタ62に、ニードル60を差し込み装着する(ステップTS1)。そして、顕微鏡アダプタ52を介してコンデンサレンズ42に装着されている装置本体50のアダプタ保持部64に対し、倒立型顕微鏡12の前面側から、そのニードル60が装着されたアダプタ62を装着する(ステップST3)。
【0033】
その後、チップ位置決めを行う(ステップST4)。即ち、操作者は、接眼レンズ48又はモニタ36で観察しながら、図示しない針位置調整ノブを操作して、目視により、ニードル60の先端に形成されているチップ部58の位置を、図示しない対物レンズの中央位置(視野中央位置)に設定する。これは、ディッシュホルダ20上にディッシュ16を載置せずに行う。
【0034】
こうしてチップ位置決めがなされたならば、或は、上記ステップST1でチップ駆動装置14が準備済であると確認した場合には、操作者は、次に、ディッシュホルダ20上へのディッシュ16の載置を行う(ステップST5)。なお、ディッシュ16は、当該ディッシュ16内の培養液中で培養される細胞に物質を導入するために、その導入しようとする物質を培養液に混濁した状態でセットされる。
【0035】
そして、モニタ36に表示された画像を確認しながらXYステージ操作用ジョイスティック28や操作モジュール54を操作して細胞操作・観察動作を実施することで、ディッシュ16内の所望の細胞に対して物質を導入する(ステップST6)。この細胞操作・観察動作は、操作者の上記操作に応じて制御コンピュータ38が、ディッシュホルダ移動コントローラ30、顕微鏡コントローラ32及びコントロールボックス56を介して、倒立型顕微鏡12及びチップ駆動装置14の各部を駆動制御することで行われるものであり、その詳細については後述する。
【0036】
そして、細胞への物質導入が終了したならば、ディッシュ16を回収する(ステップST7)。
【0037】
また、続けて別のディッシュ16にて培養された細胞に対して物質を導入する場合には、上記動作を繰り返すこととなる。この場合、既にチップ駆動装置14の準備が済んでいるので、上記ステップST1から上記ステップST5へ進むことができる。勿論、コンタミネーションの虞をなくすために、上記ステップST1から上記ステップST5に進むのではなく、上記ステップST2に進んで、ニードル60を交換するようにしても良い。
【0038】
上記ステップST7で回収されたディッシュ16は、上記導入しようとする物質が混濁された培養液が洗い流されて、新たな培養液が補充される。これにより、物質が導入された細胞が上記ディッシュ16内で更に培養される。そして、所定の期間をおいた後、細胞操作観察装置10を用いて観察される。
【0039】
この観察を行う場合には、チップ駆動装置14は必要としないので、上記ステップST1から上記ステップST5に進み、操作者は、その観察しようとする物質導入済細胞を培養しているディッシュ16を顕微鏡XYステージ26によって水平方向に移動されるディッシュホルダ20上へ載置する。
【0040】
そして、操作者は、モニタ36に表示された画像を確認しながらXYステージ操作用ジョイスティック28や操作モジュール54を操作して細胞操作・観察動作を実施することで、ディッシュ16内の所望の細胞を観察する(ステップST6)。
【0041】
そして、細胞の観察が終了したならば、ディッシュ16を回収する(ステップST7)。
【0042】
次に、上記ステップST6の細胞操作・観察動作を説明する。
【0043】
この細胞操作・観察動作は、制御コンピュータ38において、図6A及び図6Bに示すような動作を行う制御プログラムを実行することで実施される。
【0044】
なお、該制御プログラムが起動されると、図7に示すような操作ウィンドウがモニタ36に表示される。この操作ウィンドウは、メニューバー92、CCDカメラ46で取得され画像処理装置34により処理された画像を表示するモニタ表示部94、各種操作ボタンやリスト表示を行う操作部96、及びモニタ表示部94がディッシュホルダ20に載置されたディッシュ16のどの部分を表示しているのかを示す培養器マップ表示部98を有している。
【0045】
操作部96は、操作ボタンとして、物質の導入を指示するための「導入」ボタン100、チップ部58の位置登録を指示するための「針設定モード」ボタン102、物質を導入する位置の登録を指示するための「導入ポイント登録」ボタン104、物質を導入する細胞を含むエリアの登録を指示するための「操作エリア登録」ボタン106、ディッシュ16の基準点の登録を指示するための「座標変換」ボタン108、その登録した基準点のクリアを指示するための「基準点クリア」ボタン110、観察を行うことを指示するための「観察」ボタン112、等を含む。
【0046】
更に、操作部96は、導入細胞リスト114を含む。この導入細胞リスト114は、上記「導入ポイント登録」ボタン104のマウスクリック操作に応じて細胞個々の導入細胞情報が登録される制御コンピュータ38の図示しない記憶部に構成された導入細胞リストの内容を表示するものである。ここで、導入細胞情報は、位置情報(XY座標)と導入物質情報とを含むもので、導入物質情報はモニタ表示部94への表示色、物質名称、粒子のサイズ、濃度、観察条件、等を含む。なお、導入する物質としては、細胞核、細胞質の何れに導入するものであっても良く、例えば、遺伝子、色素、量子ドットなどの蛍光試薬、イオン、ペプチド、タンパク質、多糖類、等、ディッシュ16内に混濁できるものであれば構わない。これらの導入する物質を導入物質リスト116よりプルダウンリストで選択可能なように、予め登録しておくことが好ましい。このような導入細胞リスト114を表示することで、細胞個々に、導入内容が把握できるようになる。
【0047】
更に、操作部96は、操作エリアリスト118を含む。この操作エリアリスト118は、上記「操作エリア登録」ボタン106のマウスクリック操作に応じて操作エリア情報が登録される制御コンピュータ38の図示しない記憶部に構成された操作エリアリストの内容を表示するものである。この操作エリア情報は、物質の導入を行う又は行った細胞を含むエリアの位置情報、例えば当該エリアの左上等の所定のポイントのXY座標を含む。なお、操作エリアのサイズは、モニタ表示部94に表示されている範囲に相当する。
【0048】
一方、培養器マップ表示部98は、細胞が培養されるディッシュ16の透孔88の開口面88a全体に相当する倒立型顕微鏡12で観察可能な範囲である観察範囲120と、その観察範囲120の内のチップ駆動装置14によって細胞操作可能な範囲である細胞操作範囲122とを、区別可能に表示し、モニタ表示部94が表示しているエリアを現在位置124として呈示する。また、上記操作エリアリスト118に登録表示されている各エリアを細胞操作エリア126として表示する。このように、現視野の観察像を表示するモニタ表示部94と観察範囲120及び現在位置124を表示する培養器マップ表示部98とを同一モニタ上に表示することで、今現在何処を観察しているのかを容易に把握できるようになる。
【0049】
そして、制御コンピュータ38は、まず、このような操作ウィンドウにおけるメニューバー92の「ファイル」項目のマウスクリック操作等で表示されるファイルメニューより新規ファイル作成が選択されたか否かを判別する(ステップS11)。
【0050】
ここで、新規ファイル作成が選択された場合には、別途図示しないサンプル情報入力ウィンドウを開き、サンプル情報の入力を受け付け、その入力されたサンプル情報を図示しない記憶部に記憶する(ステップS12)。このサンプル情報としては、日付、番号、細胞、等が含まれる。更に、ディッシュ16の種類やチップ駆動装置14の種類をプルダウンメニューから選択できるようになっている。
【0051】
こうしてサンプル情報が入力されたならば、次に、導入物質リスト116のプルダウンリストから導入物質の選択がなされる(ステップS13)。このとき、上記導入細胞リスト114やモニタ表示部94で識別表示するための表示色の設定や、物質名称、粒子のサイズ、濃度、観察条件等の入力が可能となっている。観察条件を入力しておくことにより、物質導入された細胞を後で観察しようとしたときに、その都度、観察条件を設定する必要を無くすことができる。このような導入物質の情報も図示しない記憶部に記憶される。
【0052】
その後、ディッシュホルダ移動コントローラ30により顕微鏡XYステージ26を駆動してディッシュホルダ20を水平方向に移動させ、ディッシュ16の外形を測定することで観察範囲及び細胞操作範囲を設定し、図示しない記憶部に記憶する(ステップS14)。例えば、観察範囲は、上記入力されたディッシュ16の種類に基づいて、ディッシュ16が円形であれば外周の3点、四角形であれば対角の2点を測定すれば、特定できる。なお、この測定は、画像処理によってCCDカメラ46で取得した画像より境界を検出することで自動的に行うことも可能であるし、操作者がXYステージ操作用ジョイスティック28を操作して上記2点又は3点を指定するようにしても良い。また、制御コンピュータ38には、ディッシュ16の種類とチップ駆動装置14の種類との組み合わせに応じた細胞操作範囲のリストが予め記憶されており、上記入力されたディッシュ16の種類及びチップ駆動装置14の種類に応じて細胞操作範囲を設定することができる。このようにして、容易に観察範囲及び細胞操作範囲を設定できる。そして、それら設定した観察範囲及び細胞操作範囲と、モニタ表示部94が表示している現在位置とを、培養器マップ表示部98に、観察範囲120、細胞操作範囲122及び現在位置124として表示する(ステップS15)。
【0053】
次に、基準位置の登録を受け付け、図示しない記憶部に記憶する(ステップS16)。これは、操作者が図示しないカーソルをモニタ表示部94の所望位置に合わせてマウスクリック操作により位置を指定して、「座標変換」ボタン108を操作すると、そのボタン操作に応じて上記指定位置を基準位置として登録するものである。この基準位置は2点、登録される。この登録された基準位置は、一旦回収された当該ディッシュ16を再度セットして観察する際の位置合わせ(座標変換やθテーブル18での回転駆動)に使用される。
【0054】
その後、操作者の操作モジュール54操作に応じて、コントロールボックス56を介してチップ駆動装置14のZ駆動部66を作動させ、チップ部58を細胞の上方から細胞に近接させていく(ステップS17)。操作者は、こうして、チップ部58をディッシュ16内の細胞と同焦で観察可能な位置まで降下させる。
【0055】
そして、チップ部58の位置を図示しない記憶部に登録する(ステップS18)。これは、操作者が、「針設定モード」ボタン102を操作した後、図8に示すように、モニタ表示部94に表示されたニードル60の画像(ニードル像128)の先端部にカーソル130を合わせてマウスクリック操作することでチップ部58の位置を指定すると、そのマウスクリック操作に応じて上記指定位置をチップ部58の位置として登録するものである。このようにして、チップ部58の位置を登録することができる。また、再度同様の操作を行うことで、迅速に位置の修正が行える。
【0056】
なお、操作者の位置指定を受ける代わりに、「針設定モード」ボタン102の操作に応じて、画像処理によりカンチレバーチップ像128の幾何学的形状により自動判別するようにしても構わない。即ち、カンチレバーチップ74の幾何学的形状から、細胞内にチップ部58を侵入させなくてもチップ部58の位置が容易に判別できる。
【0057】
その後、物質を導入する位置の指定を受け付ける(ステップS19)。これは、操作者がモニタ表示部94上で導入する細胞を選定し、カーソル130をその選定した細胞内の導入したい位置に重ね合わせ、マウスクリック操作すると、その操作に応じて上記位置を指定位置として受け付けるものである。なお、この細胞の選定は、操作者が、XYステージ操作用ジョイスティック28を操作して、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動することでディッシュ16を、チップ駆動装置14によって細胞導入を行う所定の細胞操作位置に移動させ、モニタ表示部94の画像を見ながら物質を導入する細胞を選定することにより行われる。この際、操作者は、培養器マップ表示部98における細胞操作範囲122及び現在位置124の表示を確認しながらXYステージ操作用ジョイスティック28を操作することで、シャフト76をディッシュ16にぶつけてしまうことを防止できる。
【0058】
また、フローチャートには示していないが、まず、上記のようにディッシュ16を移動させて「操作エリア登録」ボタン106の操作により細胞操作エリアを図示しない記憶部に設けた操作エリアリストに登録するという操作を繰り返し、後から、該記憶部の操作エリアリストの内容を表示している操作エリアリスト118上で所望の細胞操作エリアを選択してマウスダブルクリック操作により指定することで、当該細胞操作エリアの位置を細胞操作エリア126としてモニタ表示部94に表示させ、該細胞操作エリア内から、導入しようとする細胞を選定するといった指定方法も採ることができる。
【0059】
次に、制御コンピュータ38は、チップ部58の位置と上記指定位置との相対位置を算出し、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動して、上記指定位置がチップ部58の位置と重なる位置にディッシュ16を移動する(ステップS20)。
【0060】
その後の動作は、Z値をセットしているか否かにより異なる。
1回目のチップ駆動では、まだZ値をセットしていないので(ステップS21)、第1モード細胞導入動作を行う(ステップS22)。
【0061】
この第1モード細胞導入動作においては、操作者は、モニタ表示部94の画像を観察して「細胞の歪み」または「レバー部80の撓み」を確認しながら、操作モジュール54を操作し、制御コンピュータ38は、図9に示すように、その操作に応じてコントロールボックス56を介してZ駆動部66を駆動することで、チップ部58をZ方向に微少量ずつ下降させて行き、Z方向の最適位置を決める(ステップS22A)。このとき、操作モジュール54の操作は、該操作モジュール54に設けられた図示しない移動量設定ダイアルの大・中・小でその感度を適宜切り替えながら行うことなる。また、操作モジュール54の操作ではなく、操作部96に「ステップ下降」ボタン132及び「ステップ上昇」ボタン134とステップ量設定部136を設け、それらのマウスクリック操作によってZ駆動部66の駆動方向と駆動量を指示するようにしても良い。
【0062】
そして、このようにしてチップ部58を下降させディッシュ16の底面へ近づけていき、チップ部58の先端が下降していく途中において、ディッシュ16内の細胞に接触する。ここで、更にチップ部58を下降させていくと、チップ部58の先端が細胞内、即ち、細胞膜に及び核位置であれば核に、孔または傷をつける。こうして形成された孔または傷に、ディッシュ16内に混濁された物質を流通することにより、物質が細胞内に流入する。導入しようとする粒子のサイズ等によっては、孔または傷をつけなくてもチップ部58で細胞を変形させることによる物理的刺激でストレッチレセプター等に結合されたチャンネルが開くことによっても流入する。このとき、操作者が操作モジュール54の図示しないZ値セットボタンを押すと、その押下に応じて(ステップS22B)、制御コンピュータ38は、図示しない位置検出部で検出されるそのときのアダプタ保持部64の位置を最適位置を示すZ値として、図示しない記憶部に記憶する(ステップS22C)。
【0063】
その後、操作モジュール54の操作に応じて、ニードル60を上昇させることで、チップ部58を退避させる(ステップS22D)。
【0064】
なお、チップ部58を上昇させてチップ部58を細胞から引き抜いた後は、ある一定時間が経過すると、細胞膜は自己修復により回復し、細胞内に物質が取り込まれた状態となる。
【0065】
こうして物質が細胞に導入されたならば、操作者の「導入ポイント登録」104ボタンのマウスクリック操作に応じて、チップ部58の位置に対応する顕微鏡XYステージ26の座標値(導入位置情報)及び導入物質情報を、図示しない記憶部に設けた導入細胞リストの導入ポイントNo.1の情報に登録し、その登録内容を操作部96に導入細胞リスト114として表示する(ステップS22E)。このように、物質の導入動作に連動して導入位置情報及び導入物質情報が自動的に登録されるので、導入を試みた細胞の情報が確実に記録され、操作者の登録忘れが発生することがない。
【0066】
そして、モニタ表示部94に、導入ポイントNo.1の位置情報を指定の色でマーカ138として表示する(ステップS22F)。このマーカ138は、顕微鏡XYステージ26の移動に伴い、常に導入ポイントNo.1の位置に表示される。即ち、予めチップ部58の位置を登録しておくことで、チップ部58と導入細胞位置とを相対的に位置決めすることが可能となるので、導入した細胞が判別され、なおかつ細胞内のどの位置に物質を導入したのかを示すマーカ138を精度良く表示することができるようになる。
【0067】
以下、任意の細胞個々に対して物質の導入を繰り返し行う。
即ち、メニューバー92の「ファイル」項目のマウスクリック操作等で表示されるファイルメニューより終了が選択される等の所定の終了指示がなされたか否かを判別し(ステップS23)、そのような終了指示がなければ、上記ステップS19に戻って、上述した動作を繰り返す。
【0068】
この場合、2回目からのチップ駆動では、図示しない記憶部にZ値をセットしているので(ステップS21)、第2モード細胞導入動作を実施することになる(ステップS24)。
【0069】
この場合には、Z値が図示しない記憶部にセットされているので、XY水平方向を位置決めした後は、操作モジュール54による行き過ぎた操作を気にせずに、チップ部58を十分下降させる操作をするだけで、最適位置まで下降させることができる。即ち、図9に示すように、操作者による「導入」ボタン100の操作に応じて(ステップS24A)、制御コンピュータ38は、コントロールボックス56を介してZ駆動部66を駆動してチップ部58を下降させていき、図示しない位置検出部で検出したアダプタ保持部64の位置と図示しない記憶部にセットされているZ値とを比較して、アダプタ保持部64(チップ部58)が上記Z値の位置に到達するまで、チップ部58を下降させる(ステップS24B)。
【0070】
その後は、上記ステップS22Dに進み、操作モジュール54の操作に応じて、ニードル60を上昇させることで、チップ部58を退避させる。こうして物質が細胞に導入されたならば、自動的に、チップ部58の位置に対応する顕微鏡XYステージ26の座標値及び導入物質情報を、図示しない記憶部に設けた導入細胞リストの導入ポイントNo.nの情報に登録し、その登録内容を操作部96に導入細胞リスト114として表示する(ステップS22E)。勿論、1回目のチップ駆動と同様に、操作者の「導入ポイント登録」104ボタンのマウスクリック操作に応じて、導入細胞リストに登録するようにしても構わない。そして、モニタ表示部94に、導入ポイントNo.nの位置情報を指定の色でマーカ138として表示する(ステップS22F)。このマーカ138は、顕微鏡XYステージ26の移動に伴い、常に導入ポイントNo.nの位置に表示される。
【0071】
こうして、当該ディッシュ16内の所望の細胞個々に対して物質の導入が終了したならば、操作者が上述した所定の終了指示を行うため、そのような終了指示がなされたならば(ステップS23)、図示しない記憶部に記憶したサンプル情報、導入物質、基準位置、操作エリアリスト、導入細胞リスト、等の情報をファイルとして、任意のファイル名で図示しない記憶部に保存すると共に、上記サンプル情報、導入物質、基準位置、操作エリアリスト、導入細胞リスト、等の情報を該記憶部から削除する(ステップS25)。
【0072】
一方、上記のようにして或る物質を導入したディッシュ16に対して、別の物質を更に導入する場合がある。そのような場合には、上記ステップST7で一旦回収したディッシュ16から、その中の導入物質が混濁された培養液を洗い流し、今回の導入物質を混濁した培養液に置換した後、上記ステップST5で再びディッシュホルダ20上へ載置する。
【0073】
そして、操作者は、上記操作ウィンドウにおけるメニューバー92の「ファイル」項目のマウスクリック操作等で表示されるファイルメニューより、上記ステップS25で保存したファイルを読み出す操作を行う。
【0074】
即ち、制御コンピュータ38は、ファイルメニューより新規ファイル作成が選択されない場合には(ステップS11)、ファイルの選択を受け付け(ステップS26)、その選択されたファイルよりサンプル情報を読み出して図示しない記憶部に記憶する(ステップS27)。
【0075】
その後、操作部96の「観察」ボタン112がマウスクリック操作されたか否かを判別する(ステップS28)。「観察」ボタン112が操作されない場合、上記ステップS13と同様にして、導入物質リスト116のプルダウンリストから導入物質の選択がなされる(ステップS29)。
【0076】
その後、基準位置の登録を受け付け、図示しない記憶部に記憶する(ステップS30)。これは、操作者がカーソルをモニタ表示部94の上記ステップS16で指定したのと同一位置に合わせてマウスクリック操作により位置を指定して、「座標変換」ボタン108を操作することで、制御コンピュータ38は、そのボタン操作に応じて上記指定位置を今回の基準位置として登録するものである。この基準位置は、上記ステップS16と同様に、2点、登録する。そして、この登録された今回の基準位置の座標値と上記選択されたファイルより読み出した前回登録した基準位置の座標値との差分から、上記選択されたファイルより読み出した導入細胞リスト及び操作エリアリストにおける各座標値を現在のディッシュ16の載置状態に応じた座標値に変換して、記憶部に記憶する(ステップS31)。なお、このように座標値を変換することで位置合わせを行う代わりに、ディッシュホルダ移動コントローラ30を介してθテーブル18を回転させたり顕微鏡XYステージ26を駆動させたりして、前回登録した基準位置の座標値に合致するようにディッシュ16を移動させて、位置合わせを行うようにしても良い。このように、座標変換又はディッシュ16の移動により位置合わせを行うことで、ディッシュ16を再配置後に物質を導入した細胞の位置を再現することが可能となる。
【0077】
次に、上記選択されたファイルから読み出した観察範囲及び操作範囲の情報に従って、培養器マップ表示部98に、観察範囲120及び細胞操作範囲122を表示すると共に、モニタ表示部94が表示している現在位置を現在位置124として表示する(ステップS32)。また、上記記憶部に記憶した操作エリアリストに従って、培養器マップ表示部98に、導入済の細胞操作エリア126を表示する(ステップS33)。
【0078】
その後、上記ステップS17と同様にして、チップ部58を細胞の上方から細胞に近接させていき(ステップS34)、上記ステップS18と同様にして、チップ部58の位置を記憶部に登録する(ステップS35)。またこのとき、上記記憶部に記憶した導入細胞リストに従って、モニタ表示部94に表示されるCCDカメラ46で取得した細胞の画像上に、前回導入した導入ポイントの位置情報を指定の色でマーカ138として表示する(ステップS36)。このマーカ138は、顕微鏡XYステージ26でのディッシュホルダ20の水平移動によるディッシュ16の移動に伴い、常に導入ポイントの位置に表示される。
【0079】
その後は、上記ステップS19に進み、上述したような動作を実行する。
【0080】
こうして、複数種類の導入物質を導入することができる。図7は、2種類の導入物質を導入した場合のモニタ表示部94の表示例を示している。この場合、マーカ138は、導入物質毎に異なる色で表示される。なお、図7では、色の違いをマーカ138の形状の違いで示しているが、実際には同一形状のマーカ138で色のみが異なるものとする。勿論、この図に示すように、色ではなくてマーカ138の形状で導入物質を区別可能に表示することも可能である。その場合には、導入細胞リスト114における「色」の項目が「マーカ形状」項目となり、マーカ形状を示すものに変更され、また導入物質リスト116も色ではなくてマーカ形状のリストとなる。
【0081】
次に、観察を行う場合の細胞操作・観察動作を説明する。
この観察を行う場合には、操作部96の「観察」ボタン112がマウスクリック操作され、上記ステップS28において、それが判別される。そして、その場合には、操作者による観察倍率の選定に応じて、顕微鏡コントローラ32を介して観察倍率を設定する(ステップS37)。即ち、物質導入に関しては固定の倍率で構わないが、観察に関しては種々の倍率で観察を行うことが想定されるので、操作者の要求に応じた観察倍率を設定する。
【0082】
そしてその後、上記ステップS30と同様にして、基準位置の登録を受け付け、図示しない記憶部に記憶する(ステップS38)。そして、これにより登録された今回の基準位置の座標値と上記選択されたファイルより読み出した登録されている基準位置の座標値との差分から、上記選択されたファイルより読み出した導入細胞リスト及び操作エリアリストにおける各座標値を現在のディッシュ16の載置状態に応じた座標値に変換して、記憶部に記憶する(ステップS39)。或は、ディッシュホルダ移動コントローラ30を介してθテーブル18を回転させたり顕微鏡XYステージ26を駆動させたりして、登録されている基準位置の座標値に合致するようにディッシュ16を移動させても良い。
【0083】
次に、上記ステップS32と同様にして、培養器マップ表示部98に、観察範囲120、細胞操作範囲122及び現在位置124を表示する(ステップS40)。また、上記ステップS33と同様にして、培養器マップ表示部98に、導入済の細胞操作エリア126を表示する(ステップS41)。そして、上記ステップS36と同様にして、モニタ表示部94に、導入済の導入ポイントの位置情報を指定の色でマーカ138として表示する(ステップS42)。このマーカ138は、顕微鏡XYステージ26の駆動によるディッシュ16の移動に伴い、常に導入ポイントの位置に表示される。
【0084】
その後、操作者によって、操作部96の導入細胞リスト114から所望の導入細胞が選択されてマウスがダブルクリック操作されることで、観察対象の細胞が選択されると(ステップS43)、制御コンピュータ38は、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動して、その選択された細胞の位置にディッシュ16を移動させることで、選択された導入済み細胞をモニタ表示部94に表示すると共に、顕微鏡コントローラ32を介して上記選択されたフィルから読み出した観察条件の情報に基づいて倒立型顕微鏡12を設定し、観察を開始させる(ステップS44)。このように、観察条件を登録しておくことで、自動観察が可能となる。なお、この観察時に、観察条件を適宜変更できるようになっていることは言うまでもない。また、導入細胞リスト114から選択するだけで導入細胞位置へディッシュ16が移動されて、迅速に観察が進められる。勿論、導入細胞リスト114からの選択だけでなく、操作エリアリスト118からの選択でも、同様の動作が可能である。同一エリアで複数の観察条件がある場合、それぞれ順次実行する。
【0085】
そして、操作者によって上述した所定の終了指示がなされたか否かを確認し(ステップS45)、そのような終了指示がなされていない場合には、別の細胞を観察するものとして、上記ステップS43に戻る。
【0086】
而して、所定の終了指示がなされたならば(ステップS45)、図示しない記憶部に記憶したサンプル情報、導入物質(変更された観察条件を含む)、基準位置、操作エリアリスト、導入細胞リスト、等の情報をファイルとして、任意のファイル名で図示しない記憶部に保存すると共に、上記サンプル情報、導入物質、基準位置、操作エリアリスト、導入細胞リスト、等の情報を該記憶部から削除する(ステップS46)。
【0087】
[第2実施形態]
本発明の第2実施形態に係る細胞操作観察装置10においては、XYステージ操作用ジョイスティック28の操作、モニタ表示部94のマウスクリック操作、導入ポイント選択のためのマウスクリック操作、細胞操作エリア選択のためのマウスクリック操作、等に応じて、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動する際には、図10に示すようなXYステージ移動指令動作を実行する。
【0088】
即ち、まず、その移動先位置が細胞操作範囲内か否かを判別し(ステップS100)、細胞操作範囲内であれば、ディッシュホルダ移動コントローラ30を介して顕微鏡XYステージ26を駆動してディッシュホルダ20を水平移動することでディッシュ16を移動させる(ステップS101)。そして、培養器マップ表示部98における現在位置124の表示を更新する(ステップS102)。
【0089】
これに対して、上記ステップS100において移動先位置が細胞操作エリア内でないと判別した場合には、顕微鏡XYステージ26を駆動することなく、モニタ36上に警告表示灯を行う(ステップS103)。
【0090】
上記第1実施形態では、操作者が培養器マップ表示部98に表示された細胞操作範囲122及び現在位置124を確認しながら、シャフト76がディッシュ16にぶつからないように顕微鏡XYステージ26の移動指示を行うようにしていたが、本第2実施形態では、顕微鏡XYステージ26の移動前に細胞操作範囲と移動先位置との比較を行い、移動先位置が細胞操作範囲をオーバーする場合には移動しないようにすることで、操作者の負担を軽減することができる。
【0091】
以上実施形態に基づいて本発明を説明したが、本発明は上述した実施形態に限定されるものではなく、本発明の要旨の範囲内で種々の変形や応用が可能なことは勿論である。
【0092】
例えば、図7に示した操作ウィンドウは一例であり、モニタ表示部94、操作部96及び培養器マップ表示部98の配列はこれに限定されるものではない。また、操作部96のボタンやリストの表示も、これに限定されるものではない。
【0093】
(付記)
前記の具体的実施形態から、以下のような構成の発明を抽出することができる。
【0094】
(1) 細胞へ物質を導入して観察する細胞操作観察装置において、
細胞を培養する培養器を水平方向に移動可能に載置するステージと、
上記ステージに載置された上記培養器内の細胞を撮像して表示する観察手段と、
上記観察手段によって観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する図表示手段と、
上記ステージに載置された上記培養器内の細胞の内、物質の導入を行う細胞の位置を指定する指定手段と、
上記ステージを駆動して、上記指定手段によって指定された位置を上記観察手段の視野内の所定の細胞操作位置に配置する導入位置配置手段と、
上記導入位置配置手段によって上記所定の細胞操作位置に移動された細胞の細胞膜を細胞操作ツールによって穿孔することで、上記培養器内の培養液中に混濁させた導入物質を上記細胞に導入する細胞操作手段と、
を具備することを特徴とする細胞操作観察装置。
【0095】
(対応する実施形態)
この(1)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、細胞操作観察装置10が上記細胞操作観察装置に、ディッシュ16が上記培養器に、ディッシュホルダ20、XYステージ26が上記ステージに、観察装置24、画像処理装置34、モニタ36、制御コンピュータ38が上記観察手段に、観察範囲120が上記観察範囲に対応する図に、細胞操作範囲122が上記細胞操作範囲に、現在位置124が上記現在観察している位置に、培養器マップ表示部98が上記図表示手段に、制御コンピュータ38が上記指定手段に、チップ部58の位置が上記所定の細胞操作位置に、XYステージ操作用ジョイスティック28、ディッシュホルダ移動コントローラ30、制御コンピュータ38が上記導入位置配置手段に、ニードル60が上記細胞操作ツールに、チップ駆動装置14、制御コンピュータ38、操作モジュール54、コントロールボックス56が上記細胞操作手段に、それぞれ対応する。
【0096】
(作用効果)
この(1)に記載の細胞操作観察装置によれば、観察範囲を示す図に細胞操作範囲と現在位置とを重ね合わせて表示することで、現在位置が細胞操作範囲を外れないように操作可能となるので、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を無くすことが可能な細胞操作観察装置を提供することができる。
【0097】
(2) 上記培養器の種類と上記細胞装置手段の種類とに応じた細胞操作範囲のリストを記憶する記憶手段と、
上記培養器の種類と上記細胞装置手段の種類とを指定する種類指定手段と、
を更に具備し、
上記図表示手段は、上記種類指定手段によって指定された上記培養器及び上記細胞装置手段の種類に従って上記記憶手段に記憶された上記リストより上記細胞操作範囲を読み出して表示することを特徴とする(1)に記載の細胞操作観察装置。
【0098】
(対応する実施形態)
この(2)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、制御コンピュータ38が上記記憶手段に、制御コンピュータ38が上記種類指定手段に、それぞれ対応する。
【0099】
(作用効果)
この(2)に記載の細胞操作観察装置によれば、培養器の種類と細胞装置手段の種類(細胞操作ツールの種類)とを指定するだけで、容易に細胞操作範囲を設定できる。
【0100】
(3) 上記ステージに載置された上記培養器の形状を測定する測定手段を更に具備し、
上記図表示手段は、上記測定手段によって測定された上記培養器の形状に基づいて上記ステージ上での観察位置を特定して上記図を表示することを特徴とする(2)に記載の細胞操作観察装置。
【0101】
(対応する実施形態)
この(3)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、顕微鏡XYステージ26、ディッシュホルダ移動コントローラ30、制御コンピュータ38が上記測定手段に対応する。
【0102】
(作用効果)
この(3)に記載の細胞操作観察装置によれば、培養器の形状を測定することで、容易に観察範囲を設定できる。
【0103】
(4) 上記観察手段による細胞の表示と上記図表示手段による図の表示とは、同一のモニタ上に行われることを特徴とする(1)に記載の細胞操作観察装置。
【0104】
(対応する実施形態)
この(4)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。
【0105】
(作用効果)
この(4)に記載の細胞操作観察装置によれば、観察手段による細胞の表示と図表示手段による図の表示とを同一のモニタ上に行うことで、今現在何処を観察しているのかを容易に把握できるようになる。
【0106】
(5) 上記導入位置配置手段は、上記指定手段によって指定された位置と上記細胞操作範囲とを比較し、上記指定された位置が上記細胞操作範囲をオーバーするときには、上記ステージの駆動を行わないことを特徴とする(1)に記載の細胞操作観察装置。
【0107】
(対応する実施形態)
この(5)に記載の細胞操作観察装置に関する実施形態は、第2実施形態が対応する。
【0108】
(作用効果)
この(5)に記載の細胞操作観察装置によれば、操作者の負担を軽減することができ、細胞操作ツールを不用意に細胞にぶつけてしまう危険性を確実に防止できる。
【0109】
(6) 上記細胞操作手段による細胞への導入物質の導入動作に連動して、その時点で上記観察手段によって観察しているエリアを細胞操作エリアとして記憶する記憶手段を更に具備し、
上記図表示手段は、更に、上記記憶手段に記憶した上記細胞操作エリアを上記観察範囲に対応する図に重ね合わせて表示することを特徴とする(1)に記載の細胞操作観察装置。
【0110】
(対応する実施形態)
この(6)に記載の細胞操作観察装置に関する実施形態は、第1及び第2実施形態が対応する。それらの実施形態において、例えば、制御コンピュータ38が上記記憶手段に、細胞操作エリア126が上記観察範囲に対応する図に重ね合わせて表示される細胞操作エリアに、それぞれ対応する。
【0111】
(作用効果)
この(6)に記載の細胞操作観察装置によれば、細胞操作を行ったエリアを確実に記録でき、把握することができる。
【図面の簡単な説明】
【0112】
【図1】図1は、本発明の第1実施形態に係る細胞操作観察装置を示す全体構成図である。
【図2】図2(A)は、チップ駆動装置のアダプタの取り付けに関する構成を示す図であり、図2(B)は、ニードルの構成を示す図である。
【図3】図3(A)は、ニードルの角度による干渉を説明するための図であり、図3(B)は、可動範囲を説明するための図である。
【図4】図4(A)及び(B)は、ガラスベースディッシュの上面図及び断面図であり、図4(C)はガラスベースディッシュの場合の可動範囲を説明するための図である。
【図5】図5は、第1実施形態に係る細胞操作観察装置を用いた細胞操作及び観察方法の流れを説明するためのフローチャートを示す図である。
【図6A】図6Aは、制御コンピュータによる細胞操作・観察動作の制御プログラムを説明するための一連のフローチャートの前半部分を示す図である。
【図6B】図6Bは、制御コンピュータによる細胞操作・観察動作の制御プログラムを説明するための一連のフローチャートの後半部分を示す図である。
【図7】図7は、モニタに表示される操作ウィンドウの一例を示す図である。
【図8】図8は、チップ部の位置指定を行う際のモニタ表示部の表示例を示す図である。
【図9】図9は、第1モード細胞導入動作及び第2モード細胞導入動作のフローチャートを示す図である。
【図10】図10は、本発明の第2実施形態に係る細胞操作観察装置におけるXYステージ移動指令動作のフローチャートを示す図である。
【符号の説明】
【0113】
10…細胞操作観察装置、 12…倒立型顕微鏡、 14…チップ駆動装置、 16…ディッシュ、 18…θテーブル、 20…ディッシュホルダ、 22…照明装置、 24…観察装置、 26…顕微鏡XYステージ、 28…XYステージ操作用ジョイスティック、 30…ディッシュホルダ移動コントローラ、 32…顕微鏡コントローラ、 34…画像処理装置、 36…モニタ、 38…制御コンピュータ、 40…透過照明光源、 42…コンデンサレンズ、 44…落射照明光源、 46…CCDカメラ、 48…接眼レンズ、 50…装置本体、 52…顕微鏡アダプタ、 54…操作モジュール、 56…コントロールボックス、 58…チップ部、 60…ニードル、 62…アダプタ、 64…アダプタ保持部、 66…Z駆動部、 68…Z駆動部取付部、 70…マグネット、 72…嵌合部、 74…カンチレバーチップ、 76…シャフト、 78…シリコンベース部、 80…レバー部、 82…可動範囲、 84…底板部、 84a…下面、 86…周側部、 88…透孔、 88a…開口面、 90…板状ガラス部、 92…メニューバー、 94…モニタ表示部、 96…操作部、 98…培養器マップ表示部、 100…「導入」ボタン、 102…「針設定モード」ボタン、 104…「導入ポイント登録」ボタン、 106…「操作エリア登録」ボタン、 108…「座標変換」ボタン、 110…「基準点クリア」ボタン、 112…「観察」ボタン、 114…導入細胞リスト、 116…導入物質リスト、 118…操作エリアリスト、 120…観察範囲、 122…細胞操作範囲、 124…現在位置、 126…細胞操作エリア、 128…カンチレバーチップ像、 130…カーソル、 132…「ステップ下降」ボタン、 134…「ステップ上昇」ボタン、 136…ステップ量設定部、 138…マーカ、 S…接着剤。
【特許請求の範囲】
【請求項1】
細胞へ物質を導入して観察する細胞操作観察装置において、
細胞を培養する培養器を水平方向に移動可能に載置するステージと、
上記ステージに載置された上記培養器内の細胞を撮像して表示する観察手段と、
上記観察手段によって観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する図表示手段と、
上記ステージに載置された上記培養器内の細胞の内、物質の導入を行う細胞の位置を指定する指定手段と、
上記ステージを駆動して、上記指定手段によって指定された位置を上記観察手段の視野内の所定の細胞操作位置に配置する導入位置配置手段と、
上記導入位置配置手段によって上記所定の細胞操作位置に移動された細胞の細胞膜を細胞操作ツールによって穿孔することで、上記培養器内の培養液中に混濁させた導入物質を上記細胞に導入する細胞操作手段と、
を具備することを特徴とする細胞操作観察装置。
【請求項2】
上記培養器の種類と上記細胞装置手段の種類とに応じた細胞操作範囲のリストを記憶する記憶手段と、
上記培養器の種類と上記細胞装置手段の種類とを指定する種類指定手段と、
を更に具備し、
上記図表示手段は、上記種類指定手段によって指定された上記培養器及び上記細胞装置手段の種類に従って上記記憶手段に記憶された上記リストより上記細胞操作範囲を読み出して表示することを特徴とする請求項1に記載の細胞操作観察装置。
【請求項3】
上記ステージに載置された上記培養器の形状を測定する測定手段を更に具備し、
上記図表示手段は、上記測定手段によって測定された上記培養器の形状に基づいて上記ステージ上での観察位置を特定して上記図を表示することを特徴とする請求項2に記載の細胞操作観察装置。
【請求項4】
上記観察手段による細胞の表示と上記図表示手段による図の表示とは、同一のモニタ上に行われることを特徴とする請求項1に記載の細胞操作観察装置。
【請求項5】
上記導入位置配置手段は、上記指定手段によって指定された位置と上記細胞操作範囲とを比較し、上記指定された位置が上記細胞操作範囲をオーバーするときには、上記ステージの駆動を行わないことを特徴とする請求項1に記載の細胞操作観察装置。
【請求項6】
上記細胞操作手段による細胞への導入物質の導入動作に連動して、その時点で上記観察手段によって観察しているエリアを細胞操作エリアとして記憶する記憶手段を更に具備し、
上記図表示手段は、更に、上記記憶手段に記憶した上記細胞操作エリアを上記観察範囲に対応する図に重ね合わせて表示することを特徴とする請求項1に記載の細胞操作観察装置。
【請求項1】
細胞へ物質を導入して観察する細胞操作観察装置において、
細胞を培養する培養器を水平方向に移動可能に載置するステージと、
上記ステージに載置された上記培養器内の細胞を撮像して表示する観察手段と、
上記観察手段によって観察可能な培養器の範囲である観察範囲に対応する図と、該図に重ね合わせて、細胞操作可能な範囲である細胞操作範囲及び上記観察手段によって現在観察している位置とを表示する図表示手段と、
上記ステージに載置された上記培養器内の細胞の内、物質の導入を行う細胞の位置を指定する指定手段と、
上記ステージを駆動して、上記指定手段によって指定された位置を上記観察手段の視野内の所定の細胞操作位置に配置する導入位置配置手段と、
上記導入位置配置手段によって上記所定の細胞操作位置に移動された細胞の細胞膜を細胞操作ツールによって穿孔することで、上記培養器内の培養液中に混濁させた導入物質を上記細胞に導入する細胞操作手段と、
を具備することを特徴とする細胞操作観察装置。
【請求項2】
上記培養器の種類と上記細胞装置手段の種類とに応じた細胞操作範囲のリストを記憶する記憶手段と、
上記培養器の種類と上記細胞装置手段の種類とを指定する種類指定手段と、
を更に具備し、
上記図表示手段は、上記種類指定手段によって指定された上記培養器及び上記細胞装置手段の種類に従って上記記憶手段に記憶された上記リストより上記細胞操作範囲を読み出して表示することを特徴とする請求項1に記載の細胞操作観察装置。
【請求項3】
上記ステージに載置された上記培養器の形状を測定する測定手段を更に具備し、
上記図表示手段は、上記測定手段によって測定された上記培養器の形状に基づいて上記ステージ上での観察位置を特定して上記図を表示することを特徴とする請求項2に記載の細胞操作観察装置。
【請求項4】
上記観察手段による細胞の表示と上記図表示手段による図の表示とは、同一のモニタ上に行われることを特徴とする請求項1に記載の細胞操作観察装置。
【請求項5】
上記導入位置配置手段は、上記指定手段によって指定された位置と上記細胞操作範囲とを比較し、上記指定された位置が上記細胞操作範囲をオーバーするときには、上記ステージの駆動を行わないことを特徴とする請求項1に記載の細胞操作観察装置。
【請求項6】
上記細胞操作手段による細胞への導入物質の導入動作に連動して、その時点で上記観察手段によって観察しているエリアを細胞操作エリアとして記憶する記憶手段を更に具備し、
上記図表示手段は、更に、上記記憶手段に記憶した上記細胞操作エリアを上記観察範囲に対応する図に重ね合わせて表示することを特徴とする請求項1に記載の細胞操作観察装置。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6A】
【図6B】

【図7】
【図8】
【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−4805(P2010−4805A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2008−168067(P2008−168067)
【出願日】平成20年6月27日(2008.6.27)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成20年6月27日(2008.6.27)
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]