
組合せ計量装置
【課題】 物品の滑落する方向が均等に分散される分散部を備えた組合せ計量装置を提供する。
【解決手段】 上方から供給された物品Mを周囲に分散させる分散部2と、該分散部2の下方に略円周上に配列された複数の計量ホッパ6iとを備え、前記計量ホッパ6iで計量された計量値を組み合わせる組合せ計量装置1に関する。前記分散部2は、概ね鉛直な鉛直線Lのまわりに回転すると共に、当該回転中心ないしその近傍において上方からの物品Mを受け取る分散テーブル2aを包含し、前記分散テーブル2aは頂点Pが前記回転の中心から偏心した略円錐状に形成されていることを特徴とする。
【解決手段】 上方から供給された物品Mを周囲に分散させる分散部2と、該分散部2の下方に略円周上に配列された複数の計量ホッパ6iとを備え、前記計量ホッパ6iで計量された計量値を組み合わせる組合せ計量装置1に関する。前記分散部2は、概ね鉛直な鉛直線Lのまわりに回転すると共に、当該回転中心ないしその近傍において上方からの物品Mを受け取る分散テーブル2aを包含し、前記分散テーブル2aは頂点Pが前記回転の中心から偏心した略円錐状に形成されていることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、組合せ計量装置の特に分散部に関するものである。
【背景技術】
【0002】
分散テーブルへの物品の供給には、桟付コンベヤやバケットコンベヤなどが用いられている。
ここで、たとえば、鶏肉などの柔らかい物品は、前記コンベヤから供給された物品を分散部を振動させて分散させることが難しい。そのため、回転する分散テーブルに物品を落下させる方法が採用されている。しかし、鶏肉などの柔らかく、かつ、粘着性の高い物品では、該物品を前記コンベヤから、分散テーブルの略中央に落下させることが難しく、物品の落下位置がズレてホッパへの供給が偏るおそれがある。
【0003】
そこで、下記の特許文献1の装置では、一方向に回転する分散テーブル上に突起物を設けて、下方のホッパへの物品投入の偏りの防止を狙っている。
【特許文献1】特開2001−183224(要約書)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、実際には、特許文献1の前記突起物だけでは物品の偏りを防止するには至らない。また、分散テーブルを回転させることにより、その遠心力よって放射方向に滑落する物品が前記突起物に引っ掛かる場合がある。
【0005】
したがって、本発明の目的は、物品の滑落する方向を均等に分散し得る分散部を備えた組合せ計量装置を提供することである。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明の組合せ計量装置は、上方から供給された物品を周囲に分散させる分散部と、該分散部の下方に略円周上に配列された複数の計量ホッパとを備え、前記計量ホッパで計量された計量値を組み合わせる組合せ計量装置であって、前記分散部における前記物品が落下する落下位置の状態を前記組合わせ計量の運転中に変更させる状態変更手段を備えること、を特徴とする。
【発明の効果】
【0007】
本発明によれば、分散部における落下位置の状態を組合わせ計量の運転中に変更させることにより、物品の滑落する方向や物品の飛び出す方向が分散されるので、物品の落下位置が回転の中心からズレても物品を適正に分散することができる。
【発明を実施するための最良の形態】
【0008】
本発明において、前記状態変更手段は、前記分散部に備えられた頂点の位置が偏心した略円錐状に形成された分散テーブルと、該分散テーブルを回転させる回転駆動部と、該回転駆動部を制御する回転制御部であるのが好ましい。
本態様によれば、頂点が回転の中心から偏心した略円錐の傾斜面が回転することにより、分散部における落下位置の傾斜状態(傾斜角度)が変更されて、物品の滑落する方向が分散される。そのため、物品の落下位置が回転の中心からズレても物品を適正に分散可能となる。
【0009】
本発明において、前記状態変更手段は、前記分散部に備えられた分散テーブルと、
該分散テーブルを回転させる回転駆動部と、該回転駆動部を制御する回転制御部であり、前記回転制御部は前記運転中に回転状態を変更させるのが好ましい。
本態様によれば、分散テーブルの回転速度等の回転状態を運転中に変更させることにより、物品に作用する遠心力が変化し、そのため、物品が遠心力により飛び出す方向を分散させることができる。
【0010】
本発明において、前記状態変更手段は、前記分散部に備えられた分散テーブルと、該分散テーブルの水平に対する傾斜角度を前記組合せ計量の運転中に変更させる角度変更手段であるのが好ましい。
本態様によれば、分散テーブルの傾斜角度を運転中に変更させることにより、物品の滑落する方向を分散させることができる。
【実施例1】
【0011】
以下、本発明の実施例を図面にしたがって説明する。
図1〜図3は実施例1を示す。
概略構成:
まず、組合せ計量装置の一般的な機能および動作について説明する。
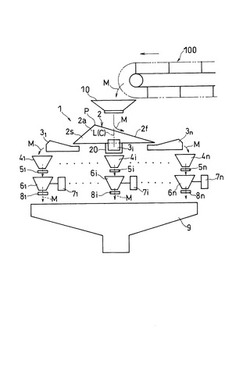
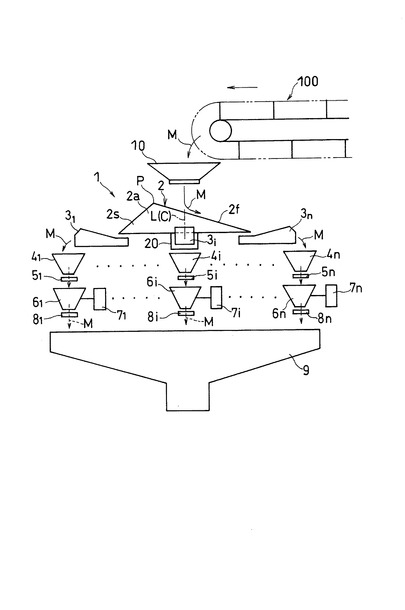
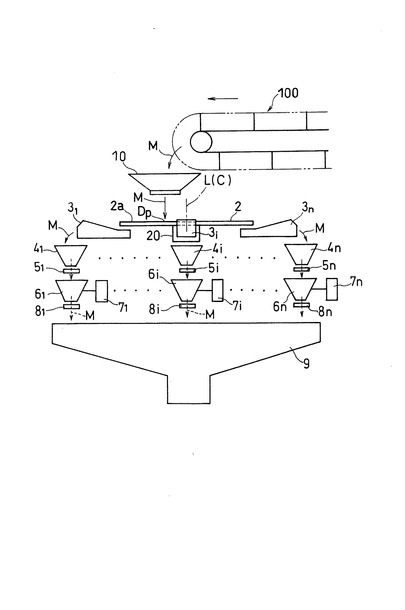
図1に示すように、搬送コンベヤ100は、被計量物である物品Mを組合せ計量装置1の分散部2に落下させる。なお、物品Mは数個ないし多数個が集められて後に袋詰めされて商品になる。
【0012】
各供給トラフ3iは分散部2上の物品Mを、各供給トラフ3iの下流に設けられた多数のプールホッパ4iに供給する。これら各プールホッパ4iには、ゲート5iが設けられ、前記各供給トラフ3iから供給されて受け取った物品Mを一時的に収容して貯留する。前記各プールホッパ4iの下流には計量ホッパ6iが設けられている。これら各計量ホッパ6iには、前記プールホッパ4iから該計量ホッパ6iに投入された物品Mの重量を検出する重量検出器7iを備えた計量ヘッドおよびゲート8iが設けられている。ゲート8iの下方には大きな集合排出シュート9が設けられており、前記各重量検出器7iで検出された物品Mの計量値を組み合わせることで、物品Mを一まとめにして目標値もしくは目標値に近い値とし、下流の製袋包装機(図示せず)等に物品Mを落下させる。
【0013】
分散部2:
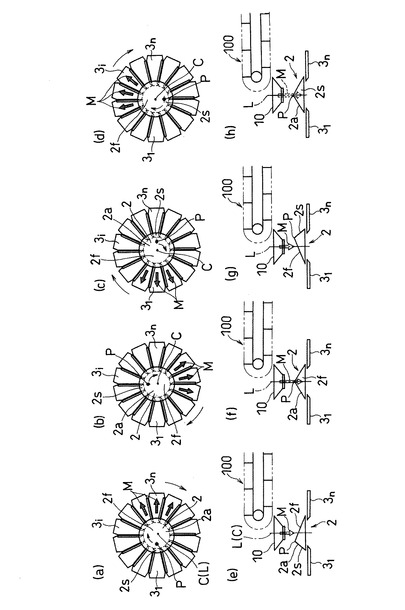
図2(a)〜(d)は、分散部2および供給トラフ3iを示す概略平面図、図2(e)〜(h)は分散部2および供給トラフ3i付近の概略側面図である。
図2(e)に示すように、前記分散部2は、頂点Pが偏心した略円錐状に形成された分散テーブル2aと、前記分散テーブル2aを回転駆動する回転駆動部20とを備えている。前記略円錐状の分散テーブル2aは、頂点Pが偏心しているので、母線の長い傾斜面2fと母線の短い傾斜面2sとを有し、前記母線の長い傾斜面2f上に、図2(a)に示す回転中心Cが設定されている。
前記各供給トラフ31 〜3n は分散テーブル2aの下方に、かつ、分散テーブル2aのまわりに略円周上に配列されている。したがって、図1の各プールホッパ4i および計量ホッパ6i は、各供給トラフ3i ごとに設けられているので、分散テーブル2aの下方に円周上に配列されていることになる。
【0014】
図2(e)に示すように、前記搬送コンベヤ100は、たとえば、バケットコンベヤからなり、下方にシュート10が設けられている。前記物品Mは、たとえば、鶏肉などの柔らかく、かつ、粘着性の高い物品からなり、搬送コンベヤ100によって搬送された後、下方のシュート10に向って、バケット毎に間欠的に投入され、シュート10から分散テーブル2a上に落下される。
【0015】
図2(e)〜(h)に示すように、前記分散テーブル2aは、前記回転駆動部20(図1)により、概ね鉛直な鉛直線Lのまわりに、たとえば、一定の回転速度で、かつ、連続的に回転駆動される。前記物品Mは、図2(e)〜(h)の矢印に示すように、シュート10によって、分散テーブル2aの回転中心C(図2(a))ないしその近傍に落下される。物品Mは、回転する分散テーブル2aの遠心力と傾斜により、傾斜した表面上を螺旋を描いて滑落し、供給トラフ3iに供給される。
【0016】
前記図1の回転駆動部20は、図示しない回転制御部によりON・OFF制御されたり、所定の一定速で回転するように制御される。また、前記回転制御部は、物品Mの種別に応じて予め設定された所定の回転速度で分散テーブル2aが回転するように、前記回転駆動部20を制御したり、物品Mを供給すべき量に応じて分散テーブル2aの回転速度の大小を制御してもよい。前記分散テーブル2a、回転駆動部20および回転制御部は、分散テーブル2aの落下位置の傾斜状態を組合せ計量の運転中に変更させる状態変更手段を構成する。
なお、供給トラフ3iは、たとえば、モータの回転を往復運動に変換することにより、物品Mの供給方向に間欠的に往復移動することで、物品Mをプールホッパ4i に供給する。
【0017】
物品Mの供給動作:
次に分散テーブル2aからの物品Mの供給トラフ3iへの供給動作について説明する。ここで、物品Mは、前述のように、バケットコンベヤによって間欠的に搬送されるが、以下の説明では、分散テーブル2aが90°回転する毎に1回の供給が行われる場合について例示して説明する。
【0018】
図2(a)〜(d)に示すように、分散テーブル2aは、回転中心Cを中心に回転している。図2(e)に示す搬送コンベヤ100からシュート10を介して物品Mが投入されると、分散テーブル2aの回転中心Cに落下した物品Mが円錐の頂点Pとは反対方向に向って、かつ、分散テーブル2aの傾斜した表面に沿って螺旋を描いて滑落する。すなわち、物品Mは母線の長い傾斜面2f上に落下し、落下後、当該傾斜面2fに沿って滑落し、し、図2(a)の矢印に示すように、図2(a)の右側方向に位置する複数の供給トラフ3iに供給される。
【0019】
その後、分散テーブル2aが90°回転する毎に物品Mが供給され、図2(b)〜(d)に示すように、物品Mが分散テーブル2aの回転方向に沿って約90°づつ異なる位置の複数の供給トラフ3iに供給される。
【0020】
たとえば、図2(a)〜(d)に示すように、分散テーブル2aが時計回りに回転している場合、物品Mは、図2(a)の右側、図2(b)の下側、図2(c)の左側、図2(d)の上側の順に、供給トラフ3iに供給される。
【0021】
このように、回転中心Cに対して偏心した頂点を持つ分散テーブル2aの傾斜面が回転することにより、物品Mの滑落する方向が分散される。そのため、物品Mの落下位置が回転の中心からズレても、物品Mが母線の長い傾斜面2fに落下し、更に、この母線の長い傾斜面2fに沿って滑落し、この母線の長い傾斜面2fが分散テーブル2aの回転に伴って回転するから、物品を適正に分散可能となる。
【0022】
ところで、たとえば、鶏肉のような比較的大きく、かつ、柔らかな物品Mでは、分散テーブル2aの頂点Pを回転中心Cから偏心させない場合、該頂点Pに物品Mが食い込み残留するおそれがある。本組合せ計量装置では、分散テーブル2aの頂点Pを、該分散テーブル2aの回転中心Cから偏心した位置に設定しているので、シュート10からの物品Mの落下位置が分散テーブル2aの中心からズレても、母線の長い形斜面2fに常に物品Mが落下する。したがって、頂点Pへの物品Mの食い込みが防止できるので、物品Mの残留を無くすことができる。
【0023】
なお、説明を分かり易くするために、前述の実施例では、物品Mの供給を分散テーブル2aが90°回転する毎に1回行うこととしたが、物品Mの供給間隔をそれ以外に設定してもよい。
たとえば、前述のように90°に1回の供給を行う為には、分散テーブル2aが1回転する間に物品Mを4回供給すればよいが、分散テーブル2aが1回転する間の物品Mの供給回数を整数にしないことで、物品Mの供給トラフ3iへの落下位置を毎回変化させることができる。
【0024】
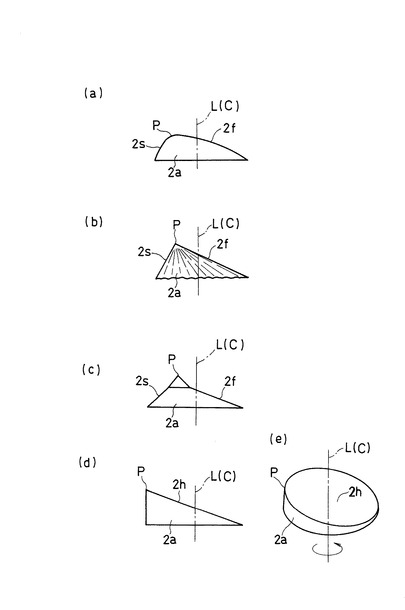
また、分散テーブル2aとしては、その頂点Pが回転中心Cから偏心した略円錐状に形成されておればよく、たとえば、図3(a)に示すように、丸みを帯びたなだらかな円錐状であってもよいし、図3(b)に示すように、分散テーブル2aの表面が波状に形成されていてもよい。更に、分散テーブル2aの表面に無数の凸部が形成されていてもよい。また、図3(c)に示すように、分散テーブル2aの頂部を円錐形に形成してもよい。
なお、一般に、母線の長い傾斜面2fは、母線の短い傾斜面2sに比べ傾斜が緩くなる。
また、図3(d),(e)に示すように、分散テーブル2aを円柱形を斜めにカットした形状に形成してもよい。すなわち、分散テーブル2aの上面2hは、たとえば平坦に形成され、かつ、水平面に対し所定の傾斜角を有する。かかる、分散テーブル2aの上面2hは、上方に向って膨出した凸の面が形成されていてもよいし、下方に向って若干凹んでいてもよい。
【実施例2】
【0025】
図4および図5は実施例2を示す。
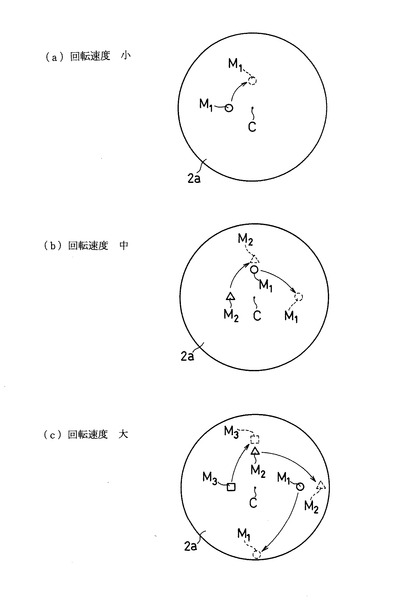
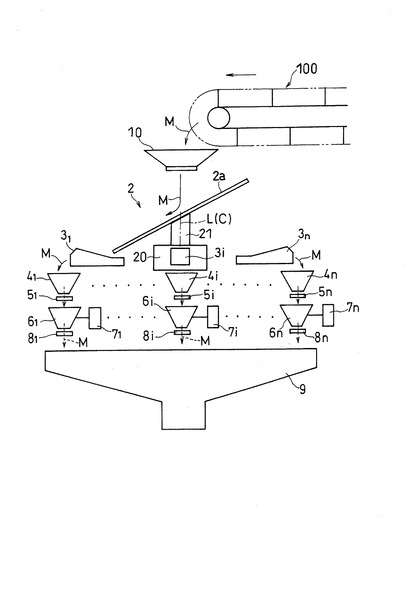
図4に示すように、本実施例2では、分散テーブル2aが平坦な円盤で構成されている。物品Mの落下位置Dpは分散テーブル2aの回転中心Cから若干離れた位置に設定されている。
【0026】
図5(a)〜図5(c)において、分散テーブル2aの回転中に該分散テーブル2aの回転速度が変更される。
図5(a)に示すように、分散テーブル2aの回転速度が「小」の時に落下した物品M1 は、分散テーブル2aの回転による遠心力により、回転中心Cから離れるように、落下点Dpから分散テーブル2aの周辺(形方向の外方)に向って移動される。
つぎに、図5(b)に示すように、分散テーブル2aの回転速度が「中」に変更されると、分散テーブル2a上の物品M1 および次に落下した物品M2 は、前記回転速度が「小」の時よりも大きく分散テーブル2aの周辺に向って移動される。
更に、図5(c)に示すように、分散テーブル2aの回転速度が「大」に変更されると、分散テーブル2a上の物品M1 ,M2 および次に落下した物品M3 は、分散テーブル2aの周辺に向って更に大きく移動される。
その後、分散テーブル2aの回転速度が減速され再び「小」に変更されて、図5(a)〜(c)に示す分散テーブル2aの回転速度の変更が繰り返される。
【0027】
ここで、分散テーブル2aの回転速度が増減することにより、分散テーブル2aの落下位置Dpに働く遠心力の状態が変化し、分散テーブル2a上の各物品Mi の回転中心Cからの移動距離が増減し、回転速度が大きい程、物品M1 が分散テーブル2a上から早く落下する。
【0028】
すなわち、分散テーブル2aの回転速度を変化させることにより、落下位置Dpに働く遠心力の状態が変化し、分散テーブル2a上の各物品Mがそれぞれ異なる方向に移動されるので、遠心力によって分散テーブル2aから飛び出す物品Mの方向を分散させることができる。
その他の構成は、実施例1と同様であり、同一部分または相当部分に同一符号を付して、その説明を省略する。
【実施例3】
【0029】
図6および図7は実施例3を示す。
本実施例3では、分散テーブル2aの水平に対する角度が前記組合せ計量の運転中に変更されるが、分散テーブル2a自体は回転しない。図6に示すように、分散テーブル2aは平坦な円盤からなり、分散テーブル2aの下方部には、該分散テーブル2aの角度を変更させる角度変更手段21が設けられている。
【0030】
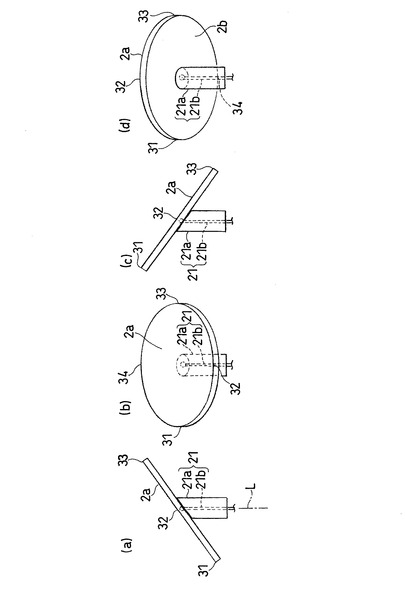
図7(a)〜(d)に示すように、前記角度変更手段21は、回転筒部21aおよび支持軸21bからなる。回転筒部21aは、その上端部が斜めに形成されており、回転軸Lを中心として回転駆動部20(図6)により回転される。本実施例においても、回転駆動部20は、実施例1と同様の回転制御部によって制御されている。
【0031】
支持軸21bは、回転筒部21aの回転軸22に沿って、該回転筒部21a内に設けられている。支持軸21bの上端は、たとえば、球状に形成されており、平面円形の分散テーブル2aの概ね中心の下部に係合している。そのため、分散テーブル2aは、支持軸21bを中心に、その角度を変更することが可能である。なお、支持軸21bは図示しないフレームに固定されており、回転しない。
【0032】
前記回転筒部21aが、回転駆動部20によって回転されると、分散テーブル2aの下面が該回転筒部21aの傾斜した上端部に案内されて、図7(a)〜(d)に示すように、分散テーブル2aの水平に対する角度が変更される。
【0033】
以下、図7(b)において、分散テーブル2aの外周端部を90°毎に第1〜第4端部31〜34とし、図7(a)における分散テーブル2aの下方に位置する端部を第1端部31、上方に位置する端部を第3端部33として分散テーブル2aの動作を説明する。
【0034】
図7(b)に示すように、回転筒部21aが90°回転すると、該回転筒部21aの上端部に分散テーブル2aの下面が案内されて、分散テーブル2aの第2端部32が下方に、第4端部34が上方に位置する。
その後、図7(c)に示すように、回転筒部21aが更に90°回転すると、分散テーブル2aの第3端部33が下方に第1端部31が上方に位置する。
更に、図7(d)に示すように、回転筒部21aが90°回転すると、分散テーブル2aの第4端部34が下方に、第2端部32が上方に位置し、分散テーブル2aの裏面2bが正面から見える状態となる。
その後、回転筒部21aが更に90°回転して分散テーブル2aが、再び図7(a)に示す状態に戻り、前述の分散テーブル2aの角度変更が繰り返される。
【0035】
このように、回転筒部21aを回転させて、分散テーブル2aの水平に対する角度を次々に変更させることにより、物品Mの滑落する方向を分散させることができる。
その他の構成は、実施例1と同様であり、同一部分または相当部分に同一符号を付して、その説明を省略する。
【産業上の利用可能性】
【0036】
本装置は、物品の重量を組み合わせる組合せ計量装置に用いることができる。
【図面の簡単な説明】
【0037】
【図1】本発明の実施例1にかかる組合せ計量装置の機能を示す概念図である。
【図2】分散テーブルから供給トラフへの物品の供給方法を示す概略平面図および概略側面図である。
【図3】他の分散テーブルの例を示す概略側面図である。
【図4】本発明の実施例2にかかる組合せ計量装置の機能を示す概念図である。
【図5】同分散テーブルの回転状態の変更方法を示す概略平面図である。
【図6】本発明の実施例3にかかる組合せ計量装置の機能を示す概念図である。
【図7】同分散テーブルの角度の変更方法を示す概略正面図である。
【符号の説明】
【0038】
1:組合せ計量装置
2:分散部
2a:分散テーブル(状態変更手段)
20:回転駆動部(状態変更手段)
21:角度変更手段
6i :計量ホッパ
C:回転中心
L:鉛直線
M:内容物
P:頂点
【技術分野】
【0001】
本発明は、組合せ計量装置の特に分散部に関するものである。
【背景技術】
【0002】
分散テーブルへの物品の供給には、桟付コンベヤやバケットコンベヤなどが用いられている。
ここで、たとえば、鶏肉などの柔らかい物品は、前記コンベヤから供給された物品を分散部を振動させて分散させることが難しい。そのため、回転する分散テーブルに物品を落下させる方法が採用されている。しかし、鶏肉などの柔らかく、かつ、粘着性の高い物品では、該物品を前記コンベヤから、分散テーブルの略中央に落下させることが難しく、物品の落下位置がズレてホッパへの供給が偏るおそれがある。
【0003】
そこで、下記の特許文献1の装置では、一方向に回転する分散テーブル上に突起物を設けて、下方のホッパへの物品投入の偏りの防止を狙っている。
【特許文献1】特開2001−183224(要約書)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、実際には、特許文献1の前記突起物だけでは物品の偏りを防止するには至らない。また、分散テーブルを回転させることにより、その遠心力よって放射方向に滑落する物品が前記突起物に引っ掛かる場合がある。
【0005】
したがって、本発明の目的は、物品の滑落する方向を均等に分散し得る分散部を備えた組合せ計量装置を提供することである。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明の組合せ計量装置は、上方から供給された物品を周囲に分散させる分散部と、該分散部の下方に略円周上に配列された複数の計量ホッパとを備え、前記計量ホッパで計量された計量値を組み合わせる組合せ計量装置であって、前記分散部における前記物品が落下する落下位置の状態を前記組合わせ計量の運転中に変更させる状態変更手段を備えること、を特徴とする。
【発明の効果】
【0007】
本発明によれば、分散部における落下位置の状態を組合わせ計量の運転中に変更させることにより、物品の滑落する方向や物品の飛び出す方向が分散されるので、物品の落下位置が回転の中心からズレても物品を適正に分散することができる。
【発明を実施するための最良の形態】
【0008】
本発明において、前記状態変更手段は、前記分散部に備えられた頂点の位置が偏心した略円錐状に形成された分散テーブルと、該分散テーブルを回転させる回転駆動部と、該回転駆動部を制御する回転制御部であるのが好ましい。
本態様によれば、頂点が回転の中心から偏心した略円錐の傾斜面が回転することにより、分散部における落下位置の傾斜状態(傾斜角度)が変更されて、物品の滑落する方向が分散される。そのため、物品の落下位置が回転の中心からズレても物品を適正に分散可能となる。
【0009】
本発明において、前記状態変更手段は、前記分散部に備えられた分散テーブルと、
該分散テーブルを回転させる回転駆動部と、該回転駆動部を制御する回転制御部であり、前記回転制御部は前記運転中に回転状態を変更させるのが好ましい。
本態様によれば、分散テーブルの回転速度等の回転状態を運転中に変更させることにより、物品に作用する遠心力が変化し、そのため、物品が遠心力により飛び出す方向を分散させることができる。
【0010】
本発明において、前記状態変更手段は、前記分散部に備えられた分散テーブルと、該分散テーブルの水平に対する傾斜角度を前記組合せ計量の運転中に変更させる角度変更手段であるのが好ましい。
本態様によれば、分散テーブルの傾斜角度を運転中に変更させることにより、物品の滑落する方向を分散させることができる。
【実施例1】
【0011】
以下、本発明の実施例を図面にしたがって説明する。
図1〜図3は実施例1を示す。
概略構成:
まず、組合せ計量装置の一般的な機能および動作について説明する。
図1に示すように、搬送コンベヤ100は、被計量物である物品Mを組合せ計量装置1の分散部2に落下させる。なお、物品Mは数個ないし多数個が集められて後に袋詰めされて商品になる。
【0012】
各供給トラフ3iは分散部2上の物品Mを、各供給トラフ3iの下流に設けられた多数のプールホッパ4iに供給する。これら各プールホッパ4iには、ゲート5iが設けられ、前記各供給トラフ3iから供給されて受け取った物品Mを一時的に収容して貯留する。前記各プールホッパ4iの下流には計量ホッパ6iが設けられている。これら各計量ホッパ6iには、前記プールホッパ4iから該計量ホッパ6iに投入された物品Mの重量を検出する重量検出器7iを備えた計量ヘッドおよびゲート8iが設けられている。ゲート8iの下方には大きな集合排出シュート9が設けられており、前記各重量検出器7iで検出された物品Mの計量値を組み合わせることで、物品Mを一まとめにして目標値もしくは目標値に近い値とし、下流の製袋包装機(図示せず)等に物品Mを落下させる。
【0013】
分散部2:
図2(a)〜(d)は、分散部2および供給トラフ3iを示す概略平面図、図2(e)〜(h)は分散部2および供給トラフ3i付近の概略側面図である。
図2(e)に示すように、前記分散部2は、頂点Pが偏心した略円錐状に形成された分散テーブル2aと、前記分散テーブル2aを回転駆動する回転駆動部20とを備えている。前記略円錐状の分散テーブル2aは、頂点Pが偏心しているので、母線の長い傾斜面2fと母線の短い傾斜面2sとを有し、前記母線の長い傾斜面2f上に、図2(a)に示す回転中心Cが設定されている。
前記各供給トラフ31 〜3n は分散テーブル2aの下方に、かつ、分散テーブル2aのまわりに略円周上に配列されている。したがって、図1の各プールホッパ4i および計量ホッパ6i は、各供給トラフ3i ごとに設けられているので、分散テーブル2aの下方に円周上に配列されていることになる。
【0014】
図2(e)に示すように、前記搬送コンベヤ100は、たとえば、バケットコンベヤからなり、下方にシュート10が設けられている。前記物品Mは、たとえば、鶏肉などの柔らかく、かつ、粘着性の高い物品からなり、搬送コンベヤ100によって搬送された後、下方のシュート10に向って、バケット毎に間欠的に投入され、シュート10から分散テーブル2a上に落下される。
【0015】
図2(e)〜(h)に示すように、前記分散テーブル2aは、前記回転駆動部20(図1)により、概ね鉛直な鉛直線Lのまわりに、たとえば、一定の回転速度で、かつ、連続的に回転駆動される。前記物品Mは、図2(e)〜(h)の矢印に示すように、シュート10によって、分散テーブル2aの回転中心C(図2(a))ないしその近傍に落下される。物品Mは、回転する分散テーブル2aの遠心力と傾斜により、傾斜した表面上を螺旋を描いて滑落し、供給トラフ3iに供給される。
【0016】
前記図1の回転駆動部20は、図示しない回転制御部によりON・OFF制御されたり、所定の一定速で回転するように制御される。また、前記回転制御部は、物品Mの種別に応じて予め設定された所定の回転速度で分散テーブル2aが回転するように、前記回転駆動部20を制御したり、物品Mを供給すべき量に応じて分散テーブル2aの回転速度の大小を制御してもよい。前記分散テーブル2a、回転駆動部20および回転制御部は、分散テーブル2aの落下位置の傾斜状態を組合せ計量の運転中に変更させる状態変更手段を構成する。
なお、供給トラフ3iは、たとえば、モータの回転を往復運動に変換することにより、物品Mの供給方向に間欠的に往復移動することで、物品Mをプールホッパ4i に供給する。
【0017】
物品Mの供給動作:
次に分散テーブル2aからの物品Mの供給トラフ3iへの供給動作について説明する。ここで、物品Mは、前述のように、バケットコンベヤによって間欠的に搬送されるが、以下の説明では、分散テーブル2aが90°回転する毎に1回の供給が行われる場合について例示して説明する。
【0018】
図2(a)〜(d)に示すように、分散テーブル2aは、回転中心Cを中心に回転している。図2(e)に示す搬送コンベヤ100からシュート10を介して物品Mが投入されると、分散テーブル2aの回転中心Cに落下した物品Mが円錐の頂点Pとは反対方向に向って、かつ、分散テーブル2aの傾斜した表面に沿って螺旋を描いて滑落する。すなわち、物品Mは母線の長い傾斜面2f上に落下し、落下後、当該傾斜面2fに沿って滑落し、し、図2(a)の矢印に示すように、図2(a)の右側方向に位置する複数の供給トラフ3iに供給される。
【0019】
その後、分散テーブル2aが90°回転する毎に物品Mが供給され、図2(b)〜(d)に示すように、物品Mが分散テーブル2aの回転方向に沿って約90°づつ異なる位置の複数の供給トラフ3iに供給される。
【0020】
たとえば、図2(a)〜(d)に示すように、分散テーブル2aが時計回りに回転している場合、物品Mは、図2(a)の右側、図2(b)の下側、図2(c)の左側、図2(d)の上側の順に、供給トラフ3iに供給される。
【0021】
このように、回転中心Cに対して偏心した頂点を持つ分散テーブル2aの傾斜面が回転することにより、物品Mの滑落する方向が分散される。そのため、物品Mの落下位置が回転の中心からズレても、物品Mが母線の長い傾斜面2fに落下し、更に、この母線の長い傾斜面2fに沿って滑落し、この母線の長い傾斜面2fが分散テーブル2aの回転に伴って回転するから、物品を適正に分散可能となる。
【0022】
ところで、たとえば、鶏肉のような比較的大きく、かつ、柔らかな物品Mでは、分散テーブル2aの頂点Pを回転中心Cから偏心させない場合、該頂点Pに物品Mが食い込み残留するおそれがある。本組合せ計量装置では、分散テーブル2aの頂点Pを、該分散テーブル2aの回転中心Cから偏心した位置に設定しているので、シュート10からの物品Mの落下位置が分散テーブル2aの中心からズレても、母線の長い形斜面2fに常に物品Mが落下する。したがって、頂点Pへの物品Mの食い込みが防止できるので、物品Mの残留を無くすことができる。
【0023】
なお、説明を分かり易くするために、前述の実施例では、物品Mの供給を分散テーブル2aが90°回転する毎に1回行うこととしたが、物品Mの供給間隔をそれ以外に設定してもよい。
たとえば、前述のように90°に1回の供給を行う為には、分散テーブル2aが1回転する間に物品Mを4回供給すればよいが、分散テーブル2aが1回転する間の物品Mの供給回数を整数にしないことで、物品Mの供給トラフ3iへの落下位置を毎回変化させることができる。
【0024】
また、分散テーブル2aとしては、その頂点Pが回転中心Cから偏心した略円錐状に形成されておればよく、たとえば、図3(a)に示すように、丸みを帯びたなだらかな円錐状であってもよいし、図3(b)に示すように、分散テーブル2aの表面が波状に形成されていてもよい。更に、分散テーブル2aの表面に無数の凸部が形成されていてもよい。また、図3(c)に示すように、分散テーブル2aの頂部を円錐形に形成してもよい。
なお、一般に、母線の長い傾斜面2fは、母線の短い傾斜面2sに比べ傾斜が緩くなる。
また、図3(d),(e)に示すように、分散テーブル2aを円柱形を斜めにカットした形状に形成してもよい。すなわち、分散テーブル2aの上面2hは、たとえば平坦に形成され、かつ、水平面に対し所定の傾斜角を有する。かかる、分散テーブル2aの上面2hは、上方に向って膨出した凸の面が形成されていてもよいし、下方に向って若干凹んでいてもよい。
【実施例2】
【0025】
図4および図5は実施例2を示す。
図4に示すように、本実施例2では、分散テーブル2aが平坦な円盤で構成されている。物品Mの落下位置Dpは分散テーブル2aの回転中心Cから若干離れた位置に設定されている。
【0026】
図5(a)〜図5(c)において、分散テーブル2aの回転中に該分散テーブル2aの回転速度が変更される。
図5(a)に示すように、分散テーブル2aの回転速度が「小」の時に落下した物品M1 は、分散テーブル2aの回転による遠心力により、回転中心Cから離れるように、落下点Dpから分散テーブル2aの周辺(形方向の外方)に向って移動される。
つぎに、図5(b)に示すように、分散テーブル2aの回転速度が「中」に変更されると、分散テーブル2a上の物品M1 および次に落下した物品M2 は、前記回転速度が「小」の時よりも大きく分散テーブル2aの周辺に向って移動される。
更に、図5(c)に示すように、分散テーブル2aの回転速度が「大」に変更されると、分散テーブル2a上の物品M1 ,M2 および次に落下した物品M3 は、分散テーブル2aの周辺に向って更に大きく移動される。
その後、分散テーブル2aの回転速度が減速され再び「小」に変更されて、図5(a)〜(c)に示す分散テーブル2aの回転速度の変更が繰り返される。
【0027】
ここで、分散テーブル2aの回転速度が増減することにより、分散テーブル2aの落下位置Dpに働く遠心力の状態が変化し、分散テーブル2a上の各物品Mi の回転中心Cからの移動距離が増減し、回転速度が大きい程、物品M1 が分散テーブル2a上から早く落下する。
【0028】
すなわち、分散テーブル2aの回転速度を変化させることにより、落下位置Dpに働く遠心力の状態が変化し、分散テーブル2a上の各物品Mがそれぞれ異なる方向に移動されるので、遠心力によって分散テーブル2aから飛び出す物品Mの方向を分散させることができる。
その他の構成は、実施例1と同様であり、同一部分または相当部分に同一符号を付して、その説明を省略する。
【実施例3】
【0029】
図6および図7は実施例3を示す。
本実施例3では、分散テーブル2aの水平に対する角度が前記組合せ計量の運転中に変更されるが、分散テーブル2a自体は回転しない。図6に示すように、分散テーブル2aは平坦な円盤からなり、分散テーブル2aの下方部には、該分散テーブル2aの角度を変更させる角度変更手段21が設けられている。
【0030】
図7(a)〜(d)に示すように、前記角度変更手段21は、回転筒部21aおよび支持軸21bからなる。回転筒部21aは、その上端部が斜めに形成されており、回転軸Lを中心として回転駆動部20(図6)により回転される。本実施例においても、回転駆動部20は、実施例1と同様の回転制御部によって制御されている。
【0031】
支持軸21bは、回転筒部21aの回転軸22に沿って、該回転筒部21a内に設けられている。支持軸21bの上端は、たとえば、球状に形成されており、平面円形の分散テーブル2aの概ね中心の下部に係合している。そのため、分散テーブル2aは、支持軸21bを中心に、その角度を変更することが可能である。なお、支持軸21bは図示しないフレームに固定されており、回転しない。
【0032】
前記回転筒部21aが、回転駆動部20によって回転されると、分散テーブル2aの下面が該回転筒部21aの傾斜した上端部に案内されて、図7(a)〜(d)に示すように、分散テーブル2aの水平に対する角度が変更される。
【0033】
以下、図7(b)において、分散テーブル2aの外周端部を90°毎に第1〜第4端部31〜34とし、図7(a)における分散テーブル2aの下方に位置する端部を第1端部31、上方に位置する端部を第3端部33として分散テーブル2aの動作を説明する。
【0034】
図7(b)に示すように、回転筒部21aが90°回転すると、該回転筒部21aの上端部に分散テーブル2aの下面が案内されて、分散テーブル2aの第2端部32が下方に、第4端部34が上方に位置する。
その後、図7(c)に示すように、回転筒部21aが更に90°回転すると、分散テーブル2aの第3端部33が下方に第1端部31が上方に位置する。
更に、図7(d)に示すように、回転筒部21aが90°回転すると、分散テーブル2aの第4端部34が下方に、第2端部32が上方に位置し、分散テーブル2aの裏面2bが正面から見える状態となる。
その後、回転筒部21aが更に90°回転して分散テーブル2aが、再び図7(a)に示す状態に戻り、前述の分散テーブル2aの角度変更が繰り返される。
【0035】
このように、回転筒部21aを回転させて、分散テーブル2aの水平に対する角度を次々に変更させることにより、物品Mの滑落する方向を分散させることができる。
その他の構成は、実施例1と同様であり、同一部分または相当部分に同一符号を付して、その説明を省略する。
【産業上の利用可能性】
【0036】
本装置は、物品の重量を組み合わせる組合せ計量装置に用いることができる。
【図面の簡単な説明】
【0037】
【図1】本発明の実施例1にかかる組合せ計量装置の機能を示す概念図である。
【図2】分散テーブルから供給トラフへの物品の供給方法を示す概略平面図および概略側面図である。
【図3】他の分散テーブルの例を示す概略側面図である。
【図4】本発明の実施例2にかかる組合せ計量装置の機能を示す概念図である。
【図5】同分散テーブルの回転状態の変更方法を示す概略平面図である。
【図6】本発明の実施例3にかかる組合せ計量装置の機能を示す概念図である。
【図7】同分散テーブルの角度の変更方法を示す概略正面図である。
【符号の説明】
【0038】
1:組合せ計量装置
2:分散部
2a:分散テーブル(状態変更手段)
20:回転駆動部(状態変更手段)
21:角度変更手段
6i :計量ホッパ
C:回転中心
L:鉛直線
M:内容物
P:頂点
【特許請求の範囲】
【請求項1】
上方から供給された物品を周囲に分散させる分散部と、
該分散部の下方に略円周上に配列された複数の計量ホッパとを備え、
前記計量ホッパで計量された計量値を組み合わせる組合せ計量装置であって、
前記分散部における前記物品が落下する落下位置の状態を前記組合わせ計量の運転中に変更させる状態変更手段を備えること、
を特徴とする組合せ計量装置。
【請求項2】
請求項1に記載の組合せ計量装置であって、前記状態変更手段は、
前記分散部における前記落下位置の表面が傾斜した分散テーブルと、
該分散テーブルを回転させることで前記落下位置の傾斜状態を変える回転駆動部と、
該回転駆動部を制御する回転制御部であること、
を特徴とする組合せ計量装置。
【請求項3】
請求項2に記載の組合せ計量装置であって、前記分散テーブルは、
頂点の位置が前記落下位置から偏心した略円錐状に形成されていることを特徴とする組合せ計量装置。
【請求項4】
請求項1に記載の組合せ計量装置であって、前記状態変更手段は、
前記分散部に備えられた分散テーブルと、
該分散テーブルを回転させる回転駆動部と、
該回転駆動部を制御する回転制御部であり、
前記回転制御部は前記運転中に回転状態を変更させること、
を特徴とする組合せ計量装置。
【請求項5】
請求項1に記載の組合せ計量装置であって、前記状態変更手段は、
前記分散部に備えられ傾斜した分散テーブルと、
該分散テーブルの水平に対する傾斜角度を前記組合せ計量の運転中に変更させる角度変更手段であることを特徴とする組合せ計量装置。
【請求項1】
上方から供給された物品を周囲に分散させる分散部と、
該分散部の下方に略円周上に配列された複数の計量ホッパとを備え、
前記計量ホッパで計量された計量値を組み合わせる組合せ計量装置であって、
前記分散部における前記物品が落下する落下位置の状態を前記組合わせ計量の運転中に変更させる状態変更手段を備えること、
を特徴とする組合せ計量装置。
【請求項2】
請求項1に記載の組合せ計量装置であって、前記状態変更手段は、
前記分散部における前記落下位置の表面が傾斜した分散テーブルと、
該分散テーブルを回転させることで前記落下位置の傾斜状態を変える回転駆動部と、
該回転駆動部を制御する回転制御部であること、
を特徴とする組合せ計量装置。
【請求項3】
請求項2に記載の組合せ計量装置であって、前記分散テーブルは、
頂点の位置が前記落下位置から偏心した略円錐状に形成されていることを特徴とする組合せ計量装置。
【請求項4】
請求項1に記載の組合せ計量装置であって、前記状態変更手段は、
前記分散部に備えられた分散テーブルと、
該分散テーブルを回転させる回転駆動部と、
該回転駆動部を制御する回転制御部であり、
前記回転制御部は前記運転中に回転状態を変更させること、
を特徴とする組合せ計量装置。
【請求項5】
請求項1に記載の組合せ計量装置であって、前記状態変更手段は、
前記分散部に備えられ傾斜した分散テーブルと、
該分散テーブルの水平に対する傾斜角度を前記組合せ計量の運転中に変更させる角度変更手段であることを特徴とする組合せ計量装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−114185(P2007−114185A)
【公開日】平成19年5月10日(2007.5.10)
【国際特許分類】
【出願番号】特願2006−240364(P2006−240364)
【出願日】平成18年9月5日(2006.9.5)
【出願人】(000147833)株式会社イシダ (859)
【公開日】平成19年5月10日(2007.5.10)
【国際特許分類】
【出願日】平成18年9月5日(2006.9.5)
【出願人】(000147833)株式会社イシダ (859)
[ Back to top ]