
組織シェーバ
【課題】体液とシェーバのハンドピースとの接触を最小限にする、様々な関節鏡シェーバを提供する。
【解決手段】関節鏡シェーバは、概して、ハンドピースに接合されている切断アセンブリを含む。一実施形態において、シェーバはハブを含み、前記ハブは、切断アセンブリをハンドピースと接続し、また切断された組織及び流体を装置から移動させるように構成されている出口ポートを有する。別の実施形態では、シェーバは、切断された組織及び流体を除去するための、内部ルーメンを有する現存するシェーバのハンドピースに組み込まれるように構成されているハブを含む。ハブは更に、流体をハンドピースから迂回させる出口ポートを含む。
【解決手段】関節鏡シェーバは、概して、ハンドピースに接合されている切断アセンブリを含む。一実施形態において、シェーバはハブを含み、前記ハブは、切断アセンブリをハンドピースと接続し、また切断された組織及び流体を装置から移動させるように構成されている出口ポートを有する。別の実施形態では、シェーバは、切断された組織及び流体を除去するための、内部ルーメンを有する現存するシェーバのハンドピースに組み込まれるように構成されているハブを含む。ハブは更に、流体をハンドピースから迂回させる出口ポートを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、身体から組織を切断及び除去するための内視鏡的シェーバ、及び該シェーバの使用方法に関する。
【背景技術】
【0002】
関節鏡手術は、例えば肩、腰、手首、膝及び脊椎等の身体の関節内領域から疾病又は損傷組織を除去するための低侵襲技術である。関節鏡シェーバは、外科手術による関節の外傷が従来の外科技術と比較して少ないように、骨、軟骨、及び他の軟組織を患者の関節から除去するのに使用され得る。一般に、関節鏡シェーバは、ハンドピース及び切断アセンブリを含む電気機械的装置である。切断アセンブリは、多くの場合、組織を切断し、組織及び流体を手術部位から除去するための長尺状の回転可能な部材を有する。シェーバのハンドピースは、通常、組織及び流体をハンドピースを通して廃棄物収集容器に移動させるための一体的な吸込み/吸引ポートを有する。ハンドピースは、切断アセンブリに解放可能に接合され得るため、各使用後に廃棄されることができる。
【0003】
関節鏡手技中、シェーバの切断アセンブリは、小切開創内に挿入される。取っ手を通して延びる吸引ポートに吸引が適用されて、身体組織及び関連する流体を、切断アセンブリを通して、そしてハンドピースの近位端を通して外部へと流す。手技が完了した後、ハンドピースは洗浄及び滅菌のために処理センターに送られる一方、シェーバの刃は一般に廃棄される。流体及び組織は、ハンドピースの内部に停留した状態となり得るため、ハンドピースは、各使用後、一連の攻撃的なブラッシング操作によって、及び/又は自動洗浄機を使用して徹底的に洗浄される必要がある。ブラッシングはハンドピースから生物学的物質を除去するのに必要であるが、機械的構成要素の耐久性を低下させ、シェーバのハンドピース内のシールを損傷する場合がある。これらの従来の洗浄技術は、生物学的物質の除去には無効であるという証拠も存在する。米国食品医薬品局は、シェーバのハンドピースの洗浄を研究し、組織が洗浄後にシェーバ内に残留して手術部位の無菌性を損なう多数のケースを見出している。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、洗浄がより容易であり、手術部位を汚染する危険性が低減された組織シェーバが必要とされている。
【課題を解決するための手段】
【0005】
本発明は、関節鏡シェーバの様々な実施形態を提供する。一実施形態において、シェーバのハンドピースと共に使用される切断アセンブリが提供され、前記アセンブリは、その遠位端上に外側切断先端部が形成されている外側シャフトと、外側シャフト内に回転可能に配置され、ドライバに結合するように構成されている内側シャフトとを含む。内側シャフトは、その遠位端上に形成されている内側組織切断先端部を含んでもよい。切断アセンブリは更にハブを含んでもよく、前記ハブは、内側シャフト及び外側シャフトに結合され、その内部にドライバが配置されている取っ手アセンブリと解放可能に接合するように構成されている。ハブはまた、ハブが取っ手アセンブリと結合された際、流体が取っ手アセンブリと接触することを防止するように構成されていてもよい。かくして、外側切断先端部及び内側切断先端部により切断された組織は、取っ手アセンブリと決して接触することなく、内側シャフトを通して流れることができる。
【0006】
切断アセンブリは、多様な機構を有することができる。例えば、切断アセンブリは更に出口ポートを含んでもよく、前記出口ポートは、流体及び組織が該出口ポートを通して通過することを可能にするように構成され、流体及び組織が切断アセンブリの近位端を通して外部に流れることを防止するように配置されている。ハブは更に、取っ手アセンブリ内に配置されているドライバに解放可能に結合するためのドライバ接合機構と、取っ手アセンブリに解放可能に結合するための取っ手接合機構とを含んでもよい。所定の態様において、内側シャフトは少なくとも1つのポートを含んでもよく、前記ポートは、流体及び組織が該ポートを通して通過することを可能にするように構成されている。切断アセンブリの出口ポートはまた、内側ハブの近位端上に形成されているドライバ接合機構の遠位方向に配置されてもよく、内側シャフト及び外側シャフトの中心軸線の横断方向に延びる中心軸線を有してもよい。ハブの遠位端は、内側シャフトの近位端に接合されてもよい。ハブはまた、ドライバが内側シャフトを外側シャフトに対して回転させるのに有効なように、ドライバに接合するように構成されてもよい。
【0007】
別の実施形態では、関節鏡組織シェーバは取っ手を含んでもよく、前記取っ手は、ドライバと、シャフトアセンブリと、取っ手とシャフトアセンブリとの間に操作可能に接続されている連結器とを有する。シャフトアセンブリは外側シャフト及び内側シャフトを含んでもよく、前記外側シャフト及び内側シャフトは、それらのそれぞれの遠位端内に形成されている少なくとも1つの開口部を有し、内側シャフトは、外側シャフト内に回転可能に配置されている。内側シャフトは更に、外側シャフト内の少なくとも1つの開口部に隣接して配置されている、開口部を通して露出された組織を切断するための組織切断遠位先端部を含んでもよい。連結器は、取っ手とシャフトアセンブリとを操作可能に接続してもよく、駆動力をドライバから内側シャフトへ伝えることができる。連結器はまた、内側シャフトの内側ルーメンからの流体を受容するための出口ポートを含んでもよく、また、流体が内側シャフトの内側ルーメンから取っ手へと通過することを防止するように構成されていてもよい。
【0008】
関節鏡組織シェーバは、様々な構成を有することができる。例えば、一実施形態では、連結器は、ドライバの作動が内側シャフトを回転させるのに有効であるように、取っ手内のドライバに接合する近位端と、内側シャフトの近位端に接合する遠位端とを含む。連結器はまた、取っ手及びシャフトアセンブリに除去可能に接続されてもよい。別の実施形態では、シャフトアセンブリ及び連結器は一体形成されている。連結器はまた、その内部に形成されている内側ルーメンと、内側シャフトの内側ルーメンと連絡する第1の末端部と、出口ポートと連絡する第2の末端部とを有してもよい。一実施形態では、連結器の内側ルーメンは、連結器の近位端の遠位方向の位置にて終結していてもよい。
【0009】
別の実施形態は、組織シェーバと共に使用されるコネクタを提供する。この実施形態では、コネクタは、近位端及び遠位端を有するハウジングを含む。コネクタの近位端は、組織シェーバの取っ手内に配置されているドライバに結合するための駆動機構を有してもよい。同様に、コネクタの遠位端は、組織シェーバの内側シャフトの近位端上の対応する駆動機構に結合するための駆動機構を有してもよい。コネクタのハウジングは更にルーメンを含んでもよく、前記ルーメンは、組織シェーバの内側シャフトからの流体を受容するための、ハウジングの遠位端内に形成されている入口ポートと、流体を組織シェーバの取っ手から離れるよう指向させるための、ハウジングの近位端の遠位方向の位置にてハウジングの側壁内に形成されている出口ポートとの間に延びる。ハウジングの近位端はまた、その近位端上に形成され、かつ組織シェーバの取っ手とプレス嵌めされるよう構成されている第1の接合機構を含んでもよく、ハウジングの遠位端は、その遠位端上に形成され、かつ組織シェーバのシャフトアセンブリとプレス嵌めされるよう構成されている第2の接合機構を含んでもよい。
【図面の簡単な説明】
【0010】
本発明は、添付の図面と共になされる以下の「発明を実施するための形態」によって、更に十分に理解されよう。
【図1】組織シェーバの一実施形態の斜視図。
【図2】図1の組織シェーバの切断アセンブリの斜視図。
【図3】図2の切断アセンブリの分解斜視図。
【図4A】その内部に形成されている出口ポートを示す、図2の切断アセンブリの外側ハブの側面図。
【図4B】図4Aの外側ハブの断面図。
【図5A】内側シャフトに接合するように構成されている接合要素を示す、図2の切断アセンブリの内側ハブの斜視図。
【図5B】図5Aの内側ハブの断面図。
【図5C】ハンドピースと接合するように構成されている接合要素を示す、図5A及び5Bの内側ハブの端面図。
【図6A】図5A〜5Cの内側ハブに接合した、図4A及び4Bの外側ハブの斜視図。
【図6B】図6Aに示したハブアセンブリの断面図。
【図7A】図3の内側シャフト及び外側シャフトの分解斜視図。
【図7B】互いに接合されている図7Aの内側シャフト及び外側シャフトの斜視図。
【図8】図3の内側シャフトに接合されている図5A〜Cの内側ハブの部分分解断面図。
【図9】外側シャフトに接合されている図4Aの外側ハブの断面図。
【図10】図2のシャフト及びハブアセンブリの断面図。
【図11】組織シェーバの別の実施形態の斜視図。
【図12A】その内部に形成されている出口ポートを示す、図11の組織シェーバのコネクタの斜視図。
【図12B】シェーバのハンドピース内に配置されているドライバに接合するように構成されている接合要素を示す、図12Aのコネクタの斜視図。
【図12C】シェーバのハンドピース及びドライバ接合要素に接合できる接合機構を示す、図12A及び12Bのコネクタの別の斜視図。
【図13】図12A及び12Bのコネクタの分解図。
【図14】図12A及び12Bのコネクタの断面図。
【発明を実施するための形態】
【0011】
本明細書において開示される装置並びに方法の構造、機能、製造、及び使用の原理についての全体的な理解を与えるため、特定の例示的な実施形態を以下に説明する。これらの実施形態の1つ以上の例を添付図面に示す。当業者は、本明細書で明確に記載され、添付の図面に示される装置及び方法が、非限定の例示的な実施形態であり、本発明の範囲は、特許請求の範囲のみにより定義されることを認識するであろう。ある例示的実施形態に関連して例示又は説明される特徴は、他の実施形態の特徴と組み合わせることができる。そのような修正及び変形は、本発明の範囲に含まれることを意図したものである。
【0012】
本発明は概して、組織/体液とシェーバのハンドピースとの接触を最小限にするよう構成されている組織シェーバを提供する。一般に、関節鏡シェーバは、組織を除去し、患者の解剖学的形態を再形成するよう提供され、組織を切断するためのシャフトアセンブリと、再使用可能なシェーバのハンドピースとを含んでもよい。一実施形態において、シャフトアセンブリはハブを有し、前記ハブは、シャフトアセンブリをハンドピースに接続し、また装置から組織及び/又は流体を除去するための出口ポートを有する。別の実施形態では、シャフトアセンブリに結合できるコネクタが提供される。コネクタは、装置から組織及び/又は流体を除去するための出口ポートを有してもよい。例示的な実施形態では、本明細書に開示した様々な実施形態の出口ポートは、切断された組織及び/又は流体がドライバ及びハンドピース内の他の要素と接触することを防止するように配置される。例えば、ハブ及びコネクタ、及びしたがって出口ポートは、流体及び/又は組織がハンドピース内に流れることを防止し、各使用後にハンドピースの滅菌をより容易にするように、シェーバのハンドピースの遠位方向に配置されてもよい。
【0013】
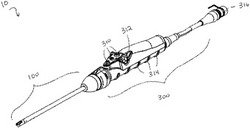
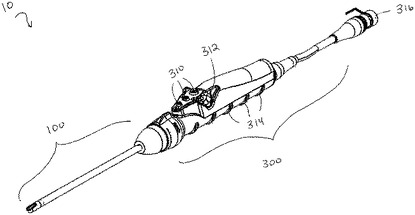
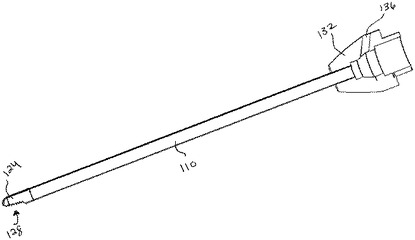
図1は、組織シェーバ10の一実施形態を示す。図示するように、関節鏡組織シェーバ10は、概して、ハンドピース300及び切断アセンブリ100を含む。ハンドピース300は、ユーザにより把持されるよう構成されていてもよく、切断アセンブリ100を制御するための様々なドライバ及びアクチュエータを含んでもよい。切断アセンブリ100は、組織を手術部位から切り取り及び移送するよう構成されていてもよい。
【0014】
シェーバのハンドピース300は多様な構成を有することができるが、装置10の把持を容易にし、装置の片手での操作を可能にするよう構成されることが好ましい。図示した実施形態では、ハンドピース300は、略円筒形を有する長尺状であり、ユーザの手とハンドピース300との間に摩擦を提供し得る表面機構314を含む。ハンドピース300はドライバ(図示せず)を収容していてもよく、前記ドライバは、ドライバの係合により切断アセンブリ100が組織を切り取るように、切断アセンブリ100と操作可能に係合していてもよい。ドライバは、取っ手の中心穴内に配置されている駆動シャフト(図示せず)を含んでもよく、またシャフトはハンドピース300の遠位端に向かって延びてもよく、当技術分野にて既知の多様な切断アセンブリと接合してもよい。ドライバは更に、モータの係合が駆動シャフトを回転させるように、駆動シャフトに結合されているモータを含んでもよい。ハンドピース300は、外部電源に接続するよう構成されていてもよく、前記外部電源は、例えばソケット316を介してモータに電力を供給し得る。ハンドピース300は更に、ドライバを作動させるための、例えば1つ以上のボタン310等のアクチュエータを含んでもよい。ボタン310は、モータを制御するプロセッサに信号を提供してもよく、またボタン310は多様な機能を有してもよい。例えば、各ボタン310は、モータを順モード、逆モード又は周期的モード等の異なるモードで作動させてもよく、又はボタン310はユーザがボタンを押す速度に応じて多数の機能を有してもよい。ハンドピースはまた、切断アセンブリに対する吸引の適用を制御する弁(図示せず)に係合するためのアクチュエータ、例えば回転可能な取っ手312を含んでもよく、又は代替的に、吸引は別個の装置を使用して適用及び制御されてもよい。ハンドピース300はまた、DePuy Mitek,Inc.のFMS duo(登録商標)+等の流体管理システムと一体化されてもよい。所定の態様では、ハンドピース300は、各使用の後にハンドピース300を滅菌できるように、モータの機能性を損なうことなく加圧滅菌されるよう構成されていてもよい。当業者は、ハンドピースが多様な構成を有することができ、当技術分野にて既知の様々なハンドピースを本発明と共に使用できることを認識するであろう。
【0015】
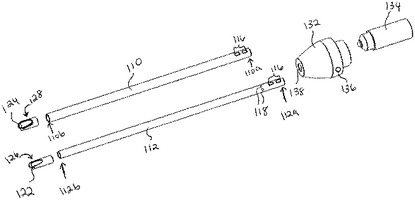
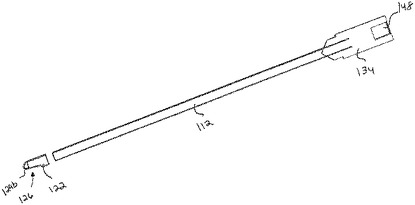
図2及び3は、図1の関節鏡シェーバの切断アセンブリ100をより詳細に示す。上記に説明したように、切断アセンブリ100は、組織を手術部位から切断及び除去するように構成されている。図示した実施形態では、切断アセンブリ100は、概して、外側シャフト110及び内側シャフト112、並びにハブアセンブリ130を含む。外側シャフト110は、外側切断要素124に接合されてもよく、同様に、内側シャフト112は、内側切断要素122に接合されてもよい。内側シャフト112は、外側シャフト110に対して回転することによって組織を切断するよう構成されていてもよい。図示するように、ハブアセンブリ130はシャフト110、112をシェーバのハンドピース300に接合してもよく、シャフト110、112から組織及び/又は流体を受容するための出口ポート136を含んでもよい。当業者は、切断アセンブリが異なる構成要素を含んでもよく、また組織を切断及び受容するための多様な他の構成を有してもよいことを認識するであろう。
【0016】
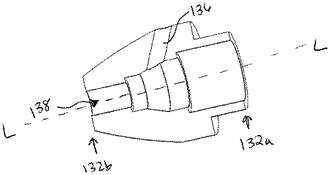
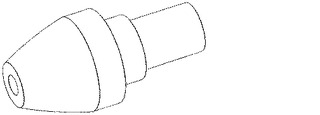
ハブアセンブリ130は様々な構成を有することができるが、一実施形態では、図示するように、ハブアセンブリ130は外側ハブ132及び内側ハブ134を含む。図4A〜4Bは、外側ハブ132をより詳細に示す。外側ハブ132の形状は様々であってもよいが、図示したハブは、遠位端132bにおいて略円錐台形を有し、近位端132aにおいて直径が縮小された円筒形部分を有する。外側ハブ132の遠位端は、外側シャフト110に固定的かつ非回転可能に接合するように構成されてもよい。外側シャフト110に関連して下記により詳細に論じるように、様々な接合技術を使用することができる。外側ハブ132の近位端は、ハンドピース300に接合するように構成されてもよい。例えば溶接、接着剤、機械的係合等の、当技術分野にて既知の様々な接合技術を使用することができる。外側ハブ132はルーメン138も有し、ルーメン138は中心軸線Lに沿って近位端132aと遠位端132bとの間に延びて、組織及び流体を手術部位から移送する。出口ポート136は、ルーメン138と外側ハブ132の外側壁との間に延びてもよい。中心軸線Lに対する出口ポート136の角度は様々であってもよく、例えば出口ポートは軸線Lに直交して延びてもよく、又は図示するように鋭角若しくは鈍角にて延びてもよい。当業者は、出口ポート136が多様な他の構成を有し得ることを認識するであろう。ハブアセンブリはまた、非限定的な例として、外科等級のステンレス鋼、チタン、及びプラスチックを含む多様な異なる材料から形成されてもよい。
【0017】
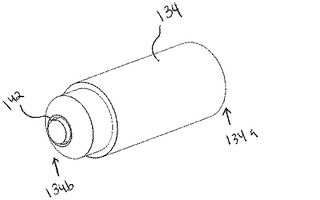
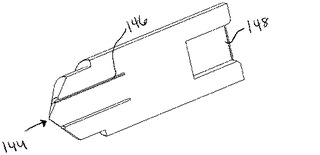
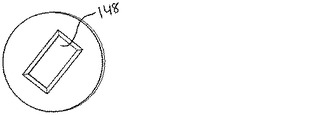
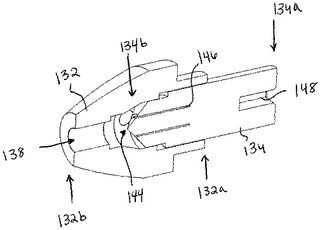
説明したように、ハブアセンブリ130はまた内側ハブ134を含んでもよく、内側ハブ134は、内側シャフト112に接合してもよく、外側ハブ132に回転可能に結合されてもよい。図5A〜5Cは、図2の内側ハブ134の異なる図を示す。内側ハブ134は多様な構成を有することができるが、図示した実施形態では、内側ハブ134は近位端134a及び遠位端134bを有する略円筒形の部材である。内側ハブ134は、その近位端134aがシェーバのハンドピース300に接合することができ、その遠位端134bが外側ハブ132の一部分内に嵌合することができるように、その近位端134a上に直径がより大きい部分を有し、その遠位端134b上に直径がより小さい部分を有する円筒形部分を有してもよい。直径がより小さい部分は、遠位方向にテーパされてもよく、尖った遠位先端部144において終結してもよい。内側ハブ134の遠位端134bは、内側シャフト112と接合するための接合機構142を有してもよい。様々な接合機構を使用することができるが、一実施形態では、接合機構は、図5A〜5Bに示すように、ハブ134の遠位端134bからハブ134の内部部分に延びる円形スロットの形態であってもよい。この接合機構142は、より詳細に記載されるように、内側シャフト112の近位端112aを受容するように構成されていてもよい。図5Cに示すように、内側ハブ134の近位端134aは、ドライバの係合が内側ハブ134を回転させるように、シェーバのハンドピース300内に配置されているドライバと接合するためのドライバ接合機構148を含んでもよい。図示した実施形態では、ドライバ接合機構148は矩形ソケットの形態であるが、当技術分野にて既知の任意の形態の接合機構を使用することができる。
【0018】
内側ハブ134及び外側ハブ132は、図6A及び6Bに示すように、接合されてもよい。図示した実施形態では、内側ハブ134の遠位端134bが外側ハブ132の近位端132a内のルーメン138内に挿入され、プレス嵌めにより取り付けられてもよい。当業者は、内側ハブ134が多様な他の方法で外側ハブ132に取り付けられ得ることを認識するであろう。好ましい実施形態では、出口ポート136は、例えば内側ハブ134等の他の構成要素により塞がれないため、組織及び/又は流体は出口ポート136を通して流れることができる。例えば、図示した実施形態では、内側ハブ134の遠位端134bは、出口ポート136の近位方向で終結する尖った遠位先端部144を有するため、組織及び流体は出口ポート136を通して装置の外部へ容易に流れることができる。
【0019】
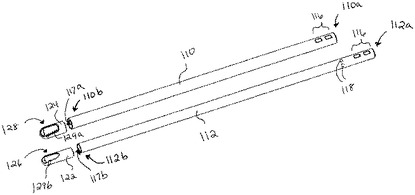
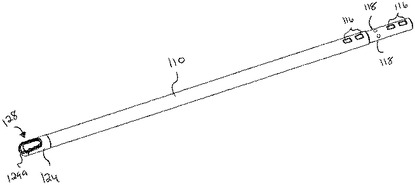
切断アセンブリ100、及び特に、手術部位から組織及び/又は流体を切断及び移動させるための内側シャフト112及び外側シャフト110も、多様な構成を有することができる。図7A及び7Bは、シャフトをより詳細に示す。一般に、内側シャフト112及び外側シャフト110は、近位端112a、110a、遠位端112b、110b、及び内部を延びる内側ルーメン117a、117bを有する長尺状部材である。両方のシャフトは、プレス嵌めを用いてシャフトをハブアセンブリ130内に固定的に取り付けるよう構成されている、例えば複数の摩擦要素116等の機構を含んでもよい。例えば溶接、接着剤、機械的係合、又は任意の他の技術等の当技術分野にて既知の様々な他の接合技術を使用して、シャフト110、112をハブアセンブリ130内に取り付けることができる。内側シャフト112は、内側ハブ134に対して一体に、かつ非回転可能に接合するように構成されてもよく、場合により、内側シャフト112及び内側ハブ134は、一単位として一緒に動作するように単一の構成要素として一体形成されてもよい。同様に、外側シャフト110は外側ハブ132に対して一体に、かつ非回転可能に接合するよう構成されてもよく、単一の構成要素として一体形成されてもよい。図示した実施形態では、内側シャフト112は、外側シャフト110よりも長い長さを有し、また内側シャフト112は、外側シャフト110の内径よりも小さい外径を有するため、外側シャフト内で回転することができる。内側シャフト112は更に、組織及び流体を内側シャフト112から、外側ハブ132内に配置されている出口ポート136へ移動させるためのポート118を含んでもよい。ポート118は、装置が組み立てられた際、外側シャフト110がポート118を通して流れる流体を遮断しないように、外側シャフト110の近位端110aの近位方向の位置に配置されることが好ましい。
【0020】
更に図示するように、内側シャフト112及び外側シャフト110の遠位端112b、110bはまた、それぞれ内側切断部材122及び外側切断部材124と接合するように構成されてもよい。切断部材122、124は多様な構成を有することができるが、これらは、隣接する組織を手術部位から切除するように構成されることが好ましい。図示した実施形態では、切断部材122、124は実質的に円筒形を有し、外側壁を通して延びる楕円形の開口部126、128を含む。開口部126、128は、組織を切断するための、のこぎり状の歯129a、129bを周囲に有してもよい。
【0021】
図1の関節鏡シェーバの構成要素は、製造プロセス中に組み立てられ、又はユーザによって組み立てられてもよい。例えば、それぞれ図8及び9に示すように、内側シャフト112は内側ハブ134と接合されてもよく、外側シャフト110は外側ハブ132と接合されてもよい。内側シャフト112の遠位端112bは、図10に示すように、構成要素がプレス嵌めによって取り付けられる迄、外側ハブ132の近位端132aに挿入され、また外側シャフト110を通して挿入され得る。代替として、シャフト110、112及びハブ132、134は、製造プロセス中に一体形成されてもよい。両方の実施形態において、外側ハブ132及び内側ハブ134はプレス嵌めによって、又は他の接合技術を用いて、例えばねじ山若しくは他の機械的技術を用いてシェーバのハンドピース300の遠位端300aに接合されてもよい。加えて、内側ハブ134の近位端132a上のドライバ接合機構148は、ドライバの係合が内側ハブ134を回転させるように、シェーバのハンドピース300内に配置されているドライバに接合してもよい。特に、ドライバのシャフトは接合機構148内に延びて、接合機構148と係合するようにキー結合されてもよく、それによりドライバは内側ハブ134及び内側シャフト112の回転を達成することができる。手技が完了した後、切断アセンブリ100はハンドピース300から離脱され、廃棄されてもよい一方、ハンドピース300は洗浄され、再使用されてもよい。当業者は、組織シェーバの構成要素が、多数の方法で、また多様な取り付けメカニズムを使用して、組み立てることができることを認識するであろう。
【0022】
使用時、組織シェーバ20の切断アセンブリ100は、患者内に形成された切開創内に挿入されてもよい。場合により、切開創内の切断アセンブリ100の深さを蛍光透視法、X線、又は当技術分野にて既知の他の可視化技術を用いて監視してもよい。切断アセンブリ100が所望の深さにて配置された後、出口ポート136を通して吸引を適用してもよい。外側切断部材124に隣接する組織は、開口部128、126のそれぞれを通して引き込まれる。シェーバのハンドピース300上のアクチュエータ310は押圧され又は別様に作動されてもよく、これは内側シャフト112を外側シャフト100に対して回転させる。シャフトは切断部材122、124に非回転可能に結合されているため、内側切断部材122は外側切断部材110に対して回転し、内側切断部材122内に捕捉された組織はのこぎり状の歯129a、129bにより切断される。適用された吸引により、切断された組織及び/又は流体が内側シャフト112内のルーメン117bを通して流れ、そして外側ハブ132内に形成された出口ポート136を通して外部に流れる。切断された組織及び/又は流体は、好適な廃棄物収集容器内に収集されてもよい。このプロセスは、手術部位から所望の量の組織が切除される迄、反復されてもよい。手技が完了した後、切断アセンブリ100はハンドピース300から離脱され、廃棄されてもよい一方、ハンドピース300は洗浄され、再使用されてもよい。
【0023】
装置から流体及び組織を除去するための、内側ルーメンを有する現存するシェーバのハンドピースに組み込まれる構成要素も提供する。例えば、一実施形態において、ハンドピースの内側ルーメン内にチューブを挿入してもよく、前記チューブはハンドピースの近位端と遠位端との間に延びてもよい。チューブの遠位端は、例えば内側シャフトの近位端等の切断アセンブリの近位端と接合してもよく、チューブの近位端は、廃棄物収集容器に連結してもよい。切断アセンブリ及びチューブは、組織及び流体がハンドピースの内側ルーメンに直接接触することを防止する流体密封の接続を有することが好ましい。図11に示すように、別の実施形態では、組織シェーバ20は、切断アセンブリ(図示せず)、コネクタ200及びハンドピース400を含んでもよい。コネクタ200は切断アセンブリをハンドピース400に接続することができ、組織及び流体がシェーバのハンドピース400内の出口ポートに入り込むことを防止することができる。より詳細には、コネクタ200の一方の末端部は切断アセンブリに接合していてもよく、他方の末端部はハンドピース400に接合していてもよい。コネクタ200は、組織及び/又は流体をシェーバのハンドピース400から迂回させることによって、生物学的物質とシェーバのハンドピース400との接触を最小限にすることができる。両方の実施形態において、組織及び体液がシェーバのハンドピースに直接接触することが防止され、ハンドピースの洗浄及び滅菌をより簡素かつより有効にする。
【0024】
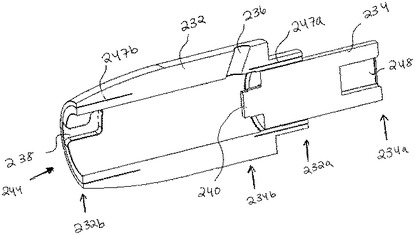
図12A〜12Cは、図11のコネクタ200をより詳細に示す。コネクタ200は切断アセンブリ及びシェーバのハンドピース400に接合することができ、組織をハンドピース400から迂回させることができる。図示した実施形態では、コネクタ200は、管形の外側ハブ232及び内側ハブ234を含む実質的に円筒形の構成要素である。外側ハブ232及び内側ハブ234は、切断アセンブリをシェーバのハンドピース400に操作可能に接続し、組織がシェーバのハンドピース400と接触することを防止する。外側ハブ232は、組織がハンドピース400に入り込むことを迂回するための出口ポート236を更に含む。図12Aに示すように、外側ハブ232は、近位端232aと遠位端232bとの間に延びるルーメン244を有する。出口ポート236は、ルーメン244と外側ハブ232の外側壁との間に延びる。内側ハブ234は、流体が出口ポート236を通して強制的に流され、ハンドピース(図示せず)内に流れることが防止されるように、外側ハブ232内のルーメンの近位端を遮断する。出口ポート236の位置は様々であってもよいが、ハブが組み立てられた際、内側ハブ234が出口ポート236を塞がないように、外側ハブ232の近位端232aの近位方向であり、かつ内側ハブ234の遠位端234bの遠位方向に位置することが好ましい。当業者は、外側ハブ及び内側ハブが多様な異なる材料から形成されることができ、多様な構成を有し得ることを認識するであろう。
【0025】
コネクタ200は、シェーバのハンドピース400と切断アセンブリとの間に配置されている仲介構成要素であるため、シェーバのハンドピース400内に配置されているドライバは、切断アセンブリと直接接合しないであろう。その代わりに、外側ハブ232及び内側ハブ234は、ハンドピース400内に配置されているドライバの作動により切断アセンブリが組織を切り取るように、ハンドピース400と切断アセンブリとの間で駆動力を伝えるように構成されている。図12B及び12Cに示すように、内側ハブ232は、シェーバのハンドピース400内に配置されているドライバに接合するためのドライバ接合機構248を近位端に含んでもよい。内側ハブ234は更に、例えばシャフト等の切断アセンブリの一部分に直接接合するための、図13に示す突出部240を遠位端234bに含んでもよい。代替的に、中間構成要素(図示せず)は、内側ハブ234の回転が切断アセンブリを回転させるように、内側ハブ234を切断アセンブリに連結してもよい。図12A〜14はまた、シェーバのハンドピース400上の対応する機構に接合し得る2つの接合機構242を有する外側ハブ232も示す。図示した実施形態では、ハンドピース400はハブ230の近位端230aに向かって案内されてもよく、ハンドピース400の遠位部分はスロット247a内に嵌合されてもよい。ハンドピース400は更に、ハンドピース400を捻りロックし、コネクタ200に取り付けることができるように、接合機構242に対応する突出部を含んでもよい。図13は、構成要素をより詳細に示す、コネクタ200の分解図である。当業者は、コネクタが多様な構成を有することができ、コネクタを切断アセンブリ及びシェーバのハンドピースと連結するよう構成されている多様な接合機構を含み得ることを認識するであろう。
【0026】
図14に示すように、外側ハブ232はその遠位端232b上に、切断アセンブリに接合するための接合要素238を含んでもよい。図示した実施形態では、接合要素238は、外側ハブ232の内側壁内に形成されている実質的にL形の凹部である。切断アセンブリ上の対応する突出部は接合要素238に係合することができ、切断アセンブリは捻りロックを用いて外側ハブ232に取り付けられてもよい。切断アセンブリの一部分はまた、下記に詳細に論じられるように、外側ハブ232内に形成されているスロット247b内に嵌合して、外側ハブ232に対する、したがってコネクタ200に対する切断アセンブリの回転を可能にし得る。当業者は、切断アセンブリが、当技術分野にて既知の様々な他の手段によりコネクタに取り付けることができることを認識するであろう。
【0027】
図14はまた、プレス嵌めによって外側ハブ232に接合されている内側ハブ234の断面を示す。内側ハブ234は、例えば溶接、接着剤、機械的係合等の当技術分野にて既知の様々な他の接合技術によって外側ハブ232に接合することができる。図示した実施形態では、内側ハブ234は、出口ポート236が内側ハブ234により塞がれないように配置されている。切断アセンブリが外側ハブ232に取り付けられた際、外側ハブ232の内側ルーメン244内に、組織及び/又は流体が内側ルーメン244を通して、出口ポート236を通して外部に流れるための空間が存在することが好ましい。加えて、内側ハブ234の突出部240は、出口ポート236の近位方向の位置にて終結して、組織及び流体が出口ポート236を通して容易に流れるようにすることが好ましい。当業者は、ルーメン244に対する出口ポート236の角度が様々であってもよく、例えば出口ポート236はルーメン244に直交して延びてもよく、又は鋭角若しくは鈍角で延びてもよいことを認識するであろう。
【0028】
図11の関節鏡シェーバは、図1に示した実施形態と同様に機能する。使用時、組織シェーバ20の切断アセンブリ(図示せず)は、患者内に形成された切開創内に挿入されてもよい。切断アセンブリの位置は、例えばX線イメージング等の当技術分野にて既知の多様な可視化技術を用いて監視され得る。吸引は、コネクタ200内に配置されている出口ポート236において切断アセンブリに適用されてもよい。適用された吸引は、切断部材に隣接する組織を、切断部材のそれぞれの開口部を通して引き込み、そして内側ルーメン内に引き込む。シェーバのハンドピース400上のアクチュエータ410を押圧して、切断アセンブリが、例えば内側切断要素及び外側切断要素の回転によって、切断アセンブリの内側ルーメン内に配置されている組織を切り取るようにしてもよい。ドライバの作動は、内側ハブ234を外側ハブ232に対して回転させる。内側ハブ234は切断アセンブリの内側シャフトに操作可能に結合している突出部240を有するため、内側ハブ234の回転が内側シャフトを外側ハブ及び外側シャフトに対して回転させ、それによって組織を切り取る。切断された組織及び/又は流体は、切断アセンブリのルーメンを通して流れ、そしてコネクタ200の外側ハブ232内に形成された出口ポート236を通して外部に流れる。シェーバのハンドピース400内の内側ルーメンを通して組織及び/又は流体を流すのではなく、コネクタ200がこの物質をシェーバのハンドピース400から迂回させ、出口ポート236を通して外部に流す。組織及び流体がハンドピース400に入り込むことが防止されるため、ハンドピース400は洗浄がより容易であり、手術部位を二次感染させる危険性が低減される。切断された組織及び/又は流体は、好適な廃棄物収集容器内に収集されてもよく、所望の量の組織が手術部位から切除される迄、プロセスが反復されてもよい。図1に示した実施形態と同様に、手技が完了した後、切断アセンブリをコネクタ200から除去し、廃棄してもよく、コネクタ200をシェーバのハンドピース400から除去してもよい。シェーバのハンドピース400及び/又はコネクタ200は、所望であれば洗浄して再使用されてもよい。
【0029】
当業者に認識されるように、提供された組織シェーバは、非限定的な例として、肩、腰、手首、膝及び脊椎を含む身体内の様々な領域から組織を除去するのに使用することができる。
【0030】
上述の実施形態に基づいた本発明の更なる特徴及び利点が、当業者には明らかとなろう。したがって、本発明は、添付の特許請求の範囲によって指定する場合を除いて、具体的に図示し説明した内容によって限定されるものではない。本明細書で引用されたすべての刊行物及び文献は、すべての内容が参照によって明らかに本願に組み込まれる。
【0031】
〔実施の態様〕
(1) 組織切断アセンブリであって、
その遠位端上に外側切断先端部が形成されている外側シャフトと、
前記外側シャフト内に回転可能に配置され、ドライバに結合するように構成されている内側シャフトであって、その遠位端上に内側組織切断先端部が形成されている、該内側シャフトと、
前記内側シャフト及び前記外側シャフトに結合され、内部にドライバが配置されている取っ手アセンブリと解放可能に接合するように構成されているハブであって、該ハブが取っ手アセンブリに結合された際、流体が取っ手アセンブリと接触することを防止するように構成されている、該ハブと、
を含み、前記外側組織切断先端部及び前記内側組織切断先端部により切断された組織が、前記内側シャフトを通して流れるように構成されている、組織切断アセンブリ。
(2) 更に出口ポートを含み、該出口ポートは流体及び組織が該出口ポートを通して通過することを可能にするよう構成され、該出口ポートは流体及び組織が前記切断アセンブリの近位端を通して外部に流れることを防止するように配置されている、実施態様1に記載の組織切断アセンブリ。
(3) 前記ハブが、取っ手アセンブリ内に配置されているドライバに解放可能に結合するためのドライバ接合機構を含む、実施態様1に記載の組織切断アセンブリ。
(4) 前記ハブが、取っ手アセンブリに解放可能に結合するための取っ手接合機構を含む、実施態様1に記載の組織切断アセンブリ。
(5) 前記内側シャフトが少なくとも1つのポートを含み、前記ポートは、流体及び組織が該ポートを通して通過することを可能にするように構成されている、実施態様1に記載の組織切断アセンブリ。
(6) 前記出口ポートが、前記ハブの近位端上に形成されている前記ドライバ接合機構の遠位方向に配置されている、実施態様3に記載の組織切断アセンブリ。
(7) 前記出口ポートが、前記内側シャフト及び前記外側シャフトの中心軸線の横断方向に延びる中心軸線を有する、実施態様2に記載の組織切断アセンブリ。
(8) 前記ハブの遠位端が、前記内側シャフトの近位端に接合される、実施態様1に記載の組織切断アセンブリ。
(9) 前記ハブは、前記ドライバが前記内側シャフトを前記外側シャフトに対して回転させるのに有効なように、ドライバと接合するように構成されている、実施態様3に記載の組織切断アセンブリ。
(10) 関節鏡組織シェーバ装置であって、
内部にドライバが配置されている取っ手と、
外側シャフト及び内側シャフトを有するシャフトアセンブリであって、該内側シャフトは該外側シャフト内に回転可能に配置され、該内側シャフト及び該外側シャフトは、それらの遠位端に形成されている少なくとも1つの開口部を有し、該内側シャフトは、該外側シャフト内の前記少なくとも1つの開口部に隣接して配置されている、前記開口部を通して露出された組織を切断するための組織切断遠位先端部を有する、シャフトアセンブリと、
前記取っ手と前記シャフトアセンブリとの間に操作可能に接続されて、駆動力を前記ドライバから前記内側シャフトへ伝える連結器であって、前記内側シャフトの内側ルーメンからの流体を受容するための、内部に形成された出口ポートを有し、該流体が前記内側シャフトの前記内側ルーメンから前記取っ手へと通過することを防止するように構成されている、連結器と、
を含む、装置。
【0032】
(11) 前記連結器が、前記ドライバの作動が前記内側シャフトを回転させるのに有効であるように、前記取っ手内の前記ドライバに接合する近位端と、前記内側シャフトの近位端に接合する遠位端とを含む、実施態様10に記載の装置。
(12) 前記連結器が、前記取っ手及び前記シャフトアセンブリに除去可能に接続されている、実施態様10に記載の装置。
(13) 前記シャフトアセンブリが、前記連結器とプレス嵌めされるように構成されている、実施態様10に記載の装置。
(14) 前記シャフトアセンブリ及び前記連結器が一体形成されている、実施態様10に記載の装置。
(15) 前記連結器は、内部に形成されている内側ルーメンを有し、該内側ルーメンは、前記内側シャフトの前記内側ルーメンと連絡する第1の末端部と、前記出口ポートと連絡する第2の末端部とを有する、実施態様10に記載の装置。
(16) 前記連結器の前記内側ルーメンが、前記連結器の近位端の遠位方向の位置にて終結する、実施態様15に記載の装置。
(17) 組織シェーバと共に使用されるコネクタであって、
近位端及び遠位端を有するハウジングであって、該近位端は、前記組織シェーバの取っ手内に配置されているドライバに結合するための駆動機構を有し、該遠位端は、組織シェーバの内側シャフトの近位端上の対応する駆動機構に結合するための駆動機構を有し、該ハウジングは更に、内部に形成されているルーメンを有し、該ルーメンは、組織シェーバの内側シャフトからの流体を受容するための、前記ハウジングの前記遠位端内に形成されている入口ポートと、流体を組織シェーバの取っ手から離れるよう指向させるための、前記ハウジングの前記近位端の遠位方向の位置にて前記ハウジングの側壁内に形成されている出口ポートとの間に延びる、前記ハウジングを含む、コネクタ。
(18) 前記ハウジングの前記近位端が、前記近位端上に形成され、かつ組織シェーバの取っ手とプレス嵌めされるよう構成されている第1の接合機構を有し、前記ハウジングの前記遠位端が、前記遠位端上に形成され、かつ組織シェーバのシャフトアセンブリとプレス嵌めされるように構成されている第2の接合機構を有する、実施態様17に記載のコネクタ。
(19) 前記ハウジングの前記近位端は密封されて、前記ハウジング内の前記ルーメンを通して流れる組織及び流体が、前記ハウジングに接合している組織シェーバの取っ手と接触することを防止する、実施態様17に記載のコネクタ。
(20) 前記ルーメンが実質的にL形である、実施態様17に記載のコネクタ。
【技術分野】
【0001】
本発明は、身体から組織を切断及び除去するための内視鏡的シェーバ、及び該シェーバの使用方法に関する。
【背景技術】
【0002】
関節鏡手術は、例えば肩、腰、手首、膝及び脊椎等の身体の関節内領域から疾病又は損傷組織を除去するための低侵襲技術である。関節鏡シェーバは、外科手術による関節の外傷が従来の外科技術と比較して少ないように、骨、軟骨、及び他の軟組織を患者の関節から除去するのに使用され得る。一般に、関節鏡シェーバは、ハンドピース及び切断アセンブリを含む電気機械的装置である。切断アセンブリは、多くの場合、組織を切断し、組織及び流体を手術部位から除去するための長尺状の回転可能な部材を有する。シェーバのハンドピースは、通常、組織及び流体をハンドピースを通して廃棄物収集容器に移動させるための一体的な吸込み/吸引ポートを有する。ハンドピースは、切断アセンブリに解放可能に接合され得るため、各使用後に廃棄されることができる。
【0003】
関節鏡手技中、シェーバの切断アセンブリは、小切開創内に挿入される。取っ手を通して延びる吸引ポートに吸引が適用されて、身体組織及び関連する流体を、切断アセンブリを通して、そしてハンドピースの近位端を通して外部へと流す。手技が完了した後、ハンドピースは洗浄及び滅菌のために処理センターに送られる一方、シェーバの刃は一般に廃棄される。流体及び組織は、ハンドピースの内部に停留した状態となり得るため、ハンドピースは、各使用後、一連の攻撃的なブラッシング操作によって、及び/又は自動洗浄機を使用して徹底的に洗浄される必要がある。ブラッシングはハンドピースから生物学的物質を除去するのに必要であるが、機械的構成要素の耐久性を低下させ、シェーバのハンドピース内のシールを損傷する場合がある。これらの従来の洗浄技術は、生物学的物質の除去には無効であるという証拠も存在する。米国食品医薬品局は、シェーバのハンドピースの洗浄を研究し、組織が洗浄後にシェーバ内に残留して手術部位の無菌性を損なう多数のケースを見出している。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、洗浄がより容易であり、手術部位を汚染する危険性が低減された組織シェーバが必要とされている。
【課題を解決するための手段】
【0005】
本発明は、関節鏡シェーバの様々な実施形態を提供する。一実施形態において、シェーバのハンドピースと共に使用される切断アセンブリが提供され、前記アセンブリは、その遠位端上に外側切断先端部が形成されている外側シャフトと、外側シャフト内に回転可能に配置され、ドライバに結合するように構成されている内側シャフトとを含む。内側シャフトは、その遠位端上に形成されている内側組織切断先端部を含んでもよい。切断アセンブリは更にハブを含んでもよく、前記ハブは、内側シャフト及び外側シャフトに結合され、その内部にドライバが配置されている取っ手アセンブリと解放可能に接合するように構成されている。ハブはまた、ハブが取っ手アセンブリと結合された際、流体が取っ手アセンブリと接触することを防止するように構成されていてもよい。かくして、外側切断先端部及び内側切断先端部により切断された組織は、取っ手アセンブリと決して接触することなく、内側シャフトを通して流れることができる。
【0006】
切断アセンブリは、多様な機構を有することができる。例えば、切断アセンブリは更に出口ポートを含んでもよく、前記出口ポートは、流体及び組織が該出口ポートを通して通過することを可能にするように構成され、流体及び組織が切断アセンブリの近位端を通して外部に流れることを防止するように配置されている。ハブは更に、取っ手アセンブリ内に配置されているドライバに解放可能に結合するためのドライバ接合機構と、取っ手アセンブリに解放可能に結合するための取っ手接合機構とを含んでもよい。所定の態様において、内側シャフトは少なくとも1つのポートを含んでもよく、前記ポートは、流体及び組織が該ポートを通して通過することを可能にするように構成されている。切断アセンブリの出口ポートはまた、内側ハブの近位端上に形成されているドライバ接合機構の遠位方向に配置されてもよく、内側シャフト及び外側シャフトの中心軸線の横断方向に延びる中心軸線を有してもよい。ハブの遠位端は、内側シャフトの近位端に接合されてもよい。ハブはまた、ドライバが内側シャフトを外側シャフトに対して回転させるのに有効なように、ドライバに接合するように構成されてもよい。
【0007】
別の実施形態では、関節鏡組織シェーバは取っ手を含んでもよく、前記取っ手は、ドライバと、シャフトアセンブリと、取っ手とシャフトアセンブリとの間に操作可能に接続されている連結器とを有する。シャフトアセンブリは外側シャフト及び内側シャフトを含んでもよく、前記外側シャフト及び内側シャフトは、それらのそれぞれの遠位端内に形成されている少なくとも1つの開口部を有し、内側シャフトは、外側シャフト内に回転可能に配置されている。内側シャフトは更に、外側シャフト内の少なくとも1つの開口部に隣接して配置されている、開口部を通して露出された組織を切断するための組織切断遠位先端部を含んでもよい。連結器は、取っ手とシャフトアセンブリとを操作可能に接続してもよく、駆動力をドライバから内側シャフトへ伝えることができる。連結器はまた、内側シャフトの内側ルーメンからの流体を受容するための出口ポートを含んでもよく、また、流体が内側シャフトの内側ルーメンから取っ手へと通過することを防止するように構成されていてもよい。
【0008】
関節鏡組織シェーバは、様々な構成を有することができる。例えば、一実施形態では、連結器は、ドライバの作動が内側シャフトを回転させるのに有効であるように、取っ手内のドライバに接合する近位端と、内側シャフトの近位端に接合する遠位端とを含む。連結器はまた、取っ手及びシャフトアセンブリに除去可能に接続されてもよい。別の実施形態では、シャフトアセンブリ及び連結器は一体形成されている。連結器はまた、その内部に形成されている内側ルーメンと、内側シャフトの内側ルーメンと連絡する第1の末端部と、出口ポートと連絡する第2の末端部とを有してもよい。一実施形態では、連結器の内側ルーメンは、連結器の近位端の遠位方向の位置にて終結していてもよい。
【0009】
別の実施形態は、組織シェーバと共に使用されるコネクタを提供する。この実施形態では、コネクタは、近位端及び遠位端を有するハウジングを含む。コネクタの近位端は、組織シェーバの取っ手内に配置されているドライバに結合するための駆動機構を有してもよい。同様に、コネクタの遠位端は、組織シェーバの内側シャフトの近位端上の対応する駆動機構に結合するための駆動機構を有してもよい。コネクタのハウジングは更にルーメンを含んでもよく、前記ルーメンは、組織シェーバの内側シャフトからの流体を受容するための、ハウジングの遠位端内に形成されている入口ポートと、流体を組織シェーバの取っ手から離れるよう指向させるための、ハウジングの近位端の遠位方向の位置にてハウジングの側壁内に形成されている出口ポートとの間に延びる。ハウジングの近位端はまた、その近位端上に形成され、かつ組織シェーバの取っ手とプレス嵌めされるよう構成されている第1の接合機構を含んでもよく、ハウジングの遠位端は、その遠位端上に形成され、かつ組織シェーバのシャフトアセンブリとプレス嵌めされるよう構成されている第2の接合機構を含んでもよい。
【図面の簡単な説明】
【0010】
本発明は、添付の図面と共になされる以下の「発明を実施するための形態」によって、更に十分に理解されよう。
【図1】組織シェーバの一実施形態の斜視図。
【図2】図1の組織シェーバの切断アセンブリの斜視図。
【図3】図2の切断アセンブリの分解斜視図。
【図4A】その内部に形成されている出口ポートを示す、図2の切断アセンブリの外側ハブの側面図。
【図4B】図4Aの外側ハブの断面図。
【図5A】内側シャフトに接合するように構成されている接合要素を示す、図2の切断アセンブリの内側ハブの斜視図。
【図5B】図5Aの内側ハブの断面図。
【図5C】ハンドピースと接合するように構成されている接合要素を示す、図5A及び5Bの内側ハブの端面図。
【図6A】図5A〜5Cの内側ハブに接合した、図4A及び4Bの外側ハブの斜視図。
【図6B】図6Aに示したハブアセンブリの断面図。
【図7A】図3の内側シャフト及び外側シャフトの分解斜視図。
【図7B】互いに接合されている図7Aの内側シャフト及び外側シャフトの斜視図。
【図8】図3の内側シャフトに接合されている図5A〜Cの内側ハブの部分分解断面図。
【図9】外側シャフトに接合されている図4Aの外側ハブの断面図。
【図10】図2のシャフト及びハブアセンブリの断面図。
【図11】組織シェーバの別の実施形態の斜視図。
【図12A】その内部に形成されている出口ポートを示す、図11の組織シェーバのコネクタの斜視図。
【図12B】シェーバのハンドピース内に配置されているドライバに接合するように構成されている接合要素を示す、図12Aのコネクタの斜視図。
【図12C】シェーバのハンドピース及びドライバ接合要素に接合できる接合機構を示す、図12A及び12Bのコネクタの別の斜視図。
【図13】図12A及び12Bのコネクタの分解図。
【図14】図12A及び12Bのコネクタの断面図。
【発明を実施するための形態】
【0011】
本明細書において開示される装置並びに方法の構造、機能、製造、及び使用の原理についての全体的な理解を与えるため、特定の例示的な実施形態を以下に説明する。これらの実施形態の1つ以上の例を添付図面に示す。当業者は、本明細書で明確に記載され、添付の図面に示される装置及び方法が、非限定の例示的な実施形態であり、本発明の範囲は、特許請求の範囲のみにより定義されることを認識するであろう。ある例示的実施形態に関連して例示又は説明される特徴は、他の実施形態の特徴と組み合わせることができる。そのような修正及び変形は、本発明の範囲に含まれることを意図したものである。
【0012】
本発明は概して、組織/体液とシェーバのハンドピースとの接触を最小限にするよう構成されている組織シェーバを提供する。一般に、関節鏡シェーバは、組織を除去し、患者の解剖学的形態を再形成するよう提供され、組織を切断するためのシャフトアセンブリと、再使用可能なシェーバのハンドピースとを含んでもよい。一実施形態において、シャフトアセンブリはハブを有し、前記ハブは、シャフトアセンブリをハンドピースに接続し、また装置から組織及び/又は流体を除去するための出口ポートを有する。別の実施形態では、シャフトアセンブリに結合できるコネクタが提供される。コネクタは、装置から組織及び/又は流体を除去するための出口ポートを有してもよい。例示的な実施形態では、本明細書に開示した様々な実施形態の出口ポートは、切断された組織及び/又は流体がドライバ及びハンドピース内の他の要素と接触することを防止するように配置される。例えば、ハブ及びコネクタ、及びしたがって出口ポートは、流体及び/又は組織がハンドピース内に流れることを防止し、各使用後にハンドピースの滅菌をより容易にするように、シェーバのハンドピースの遠位方向に配置されてもよい。
【0013】
図1は、組織シェーバ10の一実施形態を示す。図示するように、関節鏡組織シェーバ10は、概して、ハンドピース300及び切断アセンブリ100を含む。ハンドピース300は、ユーザにより把持されるよう構成されていてもよく、切断アセンブリ100を制御するための様々なドライバ及びアクチュエータを含んでもよい。切断アセンブリ100は、組織を手術部位から切り取り及び移送するよう構成されていてもよい。
【0014】
シェーバのハンドピース300は多様な構成を有することができるが、装置10の把持を容易にし、装置の片手での操作を可能にするよう構成されることが好ましい。図示した実施形態では、ハンドピース300は、略円筒形を有する長尺状であり、ユーザの手とハンドピース300との間に摩擦を提供し得る表面機構314を含む。ハンドピース300はドライバ(図示せず)を収容していてもよく、前記ドライバは、ドライバの係合により切断アセンブリ100が組織を切り取るように、切断アセンブリ100と操作可能に係合していてもよい。ドライバは、取っ手の中心穴内に配置されている駆動シャフト(図示せず)を含んでもよく、またシャフトはハンドピース300の遠位端に向かって延びてもよく、当技術分野にて既知の多様な切断アセンブリと接合してもよい。ドライバは更に、モータの係合が駆動シャフトを回転させるように、駆動シャフトに結合されているモータを含んでもよい。ハンドピース300は、外部電源に接続するよう構成されていてもよく、前記外部電源は、例えばソケット316を介してモータに電力を供給し得る。ハンドピース300は更に、ドライバを作動させるための、例えば1つ以上のボタン310等のアクチュエータを含んでもよい。ボタン310は、モータを制御するプロセッサに信号を提供してもよく、またボタン310は多様な機能を有してもよい。例えば、各ボタン310は、モータを順モード、逆モード又は周期的モード等の異なるモードで作動させてもよく、又はボタン310はユーザがボタンを押す速度に応じて多数の機能を有してもよい。ハンドピースはまた、切断アセンブリに対する吸引の適用を制御する弁(図示せず)に係合するためのアクチュエータ、例えば回転可能な取っ手312を含んでもよく、又は代替的に、吸引は別個の装置を使用して適用及び制御されてもよい。ハンドピース300はまた、DePuy Mitek,Inc.のFMS duo(登録商標)+等の流体管理システムと一体化されてもよい。所定の態様では、ハンドピース300は、各使用の後にハンドピース300を滅菌できるように、モータの機能性を損なうことなく加圧滅菌されるよう構成されていてもよい。当業者は、ハンドピースが多様な構成を有することができ、当技術分野にて既知の様々なハンドピースを本発明と共に使用できることを認識するであろう。
【0015】
図2及び3は、図1の関節鏡シェーバの切断アセンブリ100をより詳細に示す。上記に説明したように、切断アセンブリ100は、組織を手術部位から切断及び除去するように構成されている。図示した実施形態では、切断アセンブリ100は、概して、外側シャフト110及び内側シャフト112、並びにハブアセンブリ130を含む。外側シャフト110は、外側切断要素124に接合されてもよく、同様に、内側シャフト112は、内側切断要素122に接合されてもよい。内側シャフト112は、外側シャフト110に対して回転することによって組織を切断するよう構成されていてもよい。図示するように、ハブアセンブリ130はシャフト110、112をシェーバのハンドピース300に接合してもよく、シャフト110、112から組織及び/又は流体を受容するための出口ポート136を含んでもよい。当業者は、切断アセンブリが異なる構成要素を含んでもよく、また組織を切断及び受容するための多様な他の構成を有してもよいことを認識するであろう。
【0016】
ハブアセンブリ130は様々な構成を有することができるが、一実施形態では、図示するように、ハブアセンブリ130は外側ハブ132及び内側ハブ134を含む。図4A〜4Bは、外側ハブ132をより詳細に示す。外側ハブ132の形状は様々であってもよいが、図示したハブは、遠位端132bにおいて略円錐台形を有し、近位端132aにおいて直径が縮小された円筒形部分を有する。外側ハブ132の遠位端は、外側シャフト110に固定的かつ非回転可能に接合するように構成されてもよい。外側シャフト110に関連して下記により詳細に論じるように、様々な接合技術を使用することができる。外側ハブ132の近位端は、ハンドピース300に接合するように構成されてもよい。例えば溶接、接着剤、機械的係合等の、当技術分野にて既知の様々な接合技術を使用することができる。外側ハブ132はルーメン138も有し、ルーメン138は中心軸線Lに沿って近位端132aと遠位端132bとの間に延びて、組織及び流体を手術部位から移送する。出口ポート136は、ルーメン138と外側ハブ132の外側壁との間に延びてもよい。中心軸線Lに対する出口ポート136の角度は様々であってもよく、例えば出口ポートは軸線Lに直交して延びてもよく、又は図示するように鋭角若しくは鈍角にて延びてもよい。当業者は、出口ポート136が多様な他の構成を有し得ることを認識するであろう。ハブアセンブリはまた、非限定的な例として、外科等級のステンレス鋼、チタン、及びプラスチックを含む多様な異なる材料から形成されてもよい。
【0017】
説明したように、ハブアセンブリ130はまた内側ハブ134を含んでもよく、内側ハブ134は、内側シャフト112に接合してもよく、外側ハブ132に回転可能に結合されてもよい。図5A〜5Cは、図2の内側ハブ134の異なる図を示す。内側ハブ134は多様な構成を有することができるが、図示した実施形態では、内側ハブ134は近位端134a及び遠位端134bを有する略円筒形の部材である。内側ハブ134は、その近位端134aがシェーバのハンドピース300に接合することができ、その遠位端134bが外側ハブ132の一部分内に嵌合することができるように、その近位端134a上に直径がより大きい部分を有し、その遠位端134b上に直径がより小さい部分を有する円筒形部分を有してもよい。直径がより小さい部分は、遠位方向にテーパされてもよく、尖った遠位先端部144において終結してもよい。内側ハブ134の遠位端134bは、内側シャフト112と接合するための接合機構142を有してもよい。様々な接合機構を使用することができるが、一実施形態では、接合機構は、図5A〜5Bに示すように、ハブ134の遠位端134bからハブ134の内部部分に延びる円形スロットの形態であってもよい。この接合機構142は、より詳細に記載されるように、内側シャフト112の近位端112aを受容するように構成されていてもよい。図5Cに示すように、内側ハブ134の近位端134aは、ドライバの係合が内側ハブ134を回転させるように、シェーバのハンドピース300内に配置されているドライバと接合するためのドライバ接合機構148を含んでもよい。図示した実施形態では、ドライバ接合機構148は矩形ソケットの形態であるが、当技術分野にて既知の任意の形態の接合機構を使用することができる。
【0018】
内側ハブ134及び外側ハブ132は、図6A及び6Bに示すように、接合されてもよい。図示した実施形態では、内側ハブ134の遠位端134bが外側ハブ132の近位端132a内のルーメン138内に挿入され、プレス嵌めにより取り付けられてもよい。当業者は、内側ハブ134が多様な他の方法で外側ハブ132に取り付けられ得ることを認識するであろう。好ましい実施形態では、出口ポート136は、例えば内側ハブ134等の他の構成要素により塞がれないため、組織及び/又は流体は出口ポート136を通して流れることができる。例えば、図示した実施形態では、内側ハブ134の遠位端134bは、出口ポート136の近位方向で終結する尖った遠位先端部144を有するため、組織及び流体は出口ポート136を通して装置の外部へ容易に流れることができる。
【0019】
切断アセンブリ100、及び特に、手術部位から組織及び/又は流体を切断及び移動させるための内側シャフト112及び外側シャフト110も、多様な構成を有することができる。図7A及び7Bは、シャフトをより詳細に示す。一般に、内側シャフト112及び外側シャフト110は、近位端112a、110a、遠位端112b、110b、及び内部を延びる内側ルーメン117a、117bを有する長尺状部材である。両方のシャフトは、プレス嵌めを用いてシャフトをハブアセンブリ130内に固定的に取り付けるよう構成されている、例えば複数の摩擦要素116等の機構を含んでもよい。例えば溶接、接着剤、機械的係合、又は任意の他の技術等の当技術分野にて既知の様々な他の接合技術を使用して、シャフト110、112をハブアセンブリ130内に取り付けることができる。内側シャフト112は、内側ハブ134に対して一体に、かつ非回転可能に接合するように構成されてもよく、場合により、内側シャフト112及び内側ハブ134は、一単位として一緒に動作するように単一の構成要素として一体形成されてもよい。同様に、外側シャフト110は外側ハブ132に対して一体に、かつ非回転可能に接合するよう構成されてもよく、単一の構成要素として一体形成されてもよい。図示した実施形態では、内側シャフト112は、外側シャフト110よりも長い長さを有し、また内側シャフト112は、外側シャフト110の内径よりも小さい外径を有するため、外側シャフト内で回転することができる。内側シャフト112は更に、組織及び流体を内側シャフト112から、外側ハブ132内に配置されている出口ポート136へ移動させるためのポート118を含んでもよい。ポート118は、装置が組み立てられた際、外側シャフト110がポート118を通して流れる流体を遮断しないように、外側シャフト110の近位端110aの近位方向の位置に配置されることが好ましい。
【0020】
更に図示するように、内側シャフト112及び外側シャフト110の遠位端112b、110bはまた、それぞれ内側切断部材122及び外側切断部材124と接合するように構成されてもよい。切断部材122、124は多様な構成を有することができるが、これらは、隣接する組織を手術部位から切除するように構成されることが好ましい。図示した実施形態では、切断部材122、124は実質的に円筒形を有し、外側壁を通して延びる楕円形の開口部126、128を含む。開口部126、128は、組織を切断するための、のこぎり状の歯129a、129bを周囲に有してもよい。
【0021】
図1の関節鏡シェーバの構成要素は、製造プロセス中に組み立てられ、又はユーザによって組み立てられてもよい。例えば、それぞれ図8及び9に示すように、内側シャフト112は内側ハブ134と接合されてもよく、外側シャフト110は外側ハブ132と接合されてもよい。内側シャフト112の遠位端112bは、図10に示すように、構成要素がプレス嵌めによって取り付けられる迄、外側ハブ132の近位端132aに挿入され、また外側シャフト110を通して挿入され得る。代替として、シャフト110、112及びハブ132、134は、製造プロセス中に一体形成されてもよい。両方の実施形態において、外側ハブ132及び内側ハブ134はプレス嵌めによって、又は他の接合技術を用いて、例えばねじ山若しくは他の機械的技術を用いてシェーバのハンドピース300の遠位端300aに接合されてもよい。加えて、内側ハブ134の近位端132a上のドライバ接合機構148は、ドライバの係合が内側ハブ134を回転させるように、シェーバのハンドピース300内に配置されているドライバに接合してもよい。特に、ドライバのシャフトは接合機構148内に延びて、接合機構148と係合するようにキー結合されてもよく、それによりドライバは内側ハブ134及び内側シャフト112の回転を達成することができる。手技が完了した後、切断アセンブリ100はハンドピース300から離脱され、廃棄されてもよい一方、ハンドピース300は洗浄され、再使用されてもよい。当業者は、組織シェーバの構成要素が、多数の方法で、また多様な取り付けメカニズムを使用して、組み立てることができることを認識するであろう。
【0022】
使用時、組織シェーバ20の切断アセンブリ100は、患者内に形成された切開創内に挿入されてもよい。場合により、切開創内の切断アセンブリ100の深さを蛍光透視法、X線、又は当技術分野にて既知の他の可視化技術を用いて監視してもよい。切断アセンブリ100が所望の深さにて配置された後、出口ポート136を通して吸引を適用してもよい。外側切断部材124に隣接する組織は、開口部128、126のそれぞれを通して引き込まれる。シェーバのハンドピース300上のアクチュエータ310は押圧され又は別様に作動されてもよく、これは内側シャフト112を外側シャフト100に対して回転させる。シャフトは切断部材122、124に非回転可能に結合されているため、内側切断部材122は外側切断部材110に対して回転し、内側切断部材122内に捕捉された組織はのこぎり状の歯129a、129bにより切断される。適用された吸引により、切断された組織及び/又は流体が内側シャフト112内のルーメン117bを通して流れ、そして外側ハブ132内に形成された出口ポート136を通して外部に流れる。切断された組織及び/又は流体は、好適な廃棄物収集容器内に収集されてもよい。このプロセスは、手術部位から所望の量の組織が切除される迄、反復されてもよい。手技が完了した後、切断アセンブリ100はハンドピース300から離脱され、廃棄されてもよい一方、ハンドピース300は洗浄され、再使用されてもよい。
【0023】
装置から流体及び組織を除去するための、内側ルーメンを有する現存するシェーバのハンドピースに組み込まれる構成要素も提供する。例えば、一実施形態において、ハンドピースの内側ルーメン内にチューブを挿入してもよく、前記チューブはハンドピースの近位端と遠位端との間に延びてもよい。チューブの遠位端は、例えば内側シャフトの近位端等の切断アセンブリの近位端と接合してもよく、チューブの近位端は、廃棄物収集容器に連結してもよい。切断アセンブリ及びチューブは、組織及び流体がハンドピースの内側ルーメンに直接接触することを防止する流体密封の接続を有することが好ましい。図11に示すように、別の実施形態では、組織シェーバ20は、切断アセンブリ(図示せず)、コネクタ200及びハンドピース400を含んでもよい。コネクタ200は切断アセンブリをハンドピース400に接続することができ、組織及び流体がシェーバのハンドピース400内の出口ポートに入り込むことを防止することができる。より詳細には、コネクタ200の一方の末端部は切断アセンブリに接合していてもよく、他方の末端部はハンドピース400に接合していてもよい。コネクタ200は、組織及び/又は流体をシェーバのハンドピース400から迂回させることによって、生物学的物質とシェーバのハンドピース400との接触を最小限にすることができる。両方の実施形態において、組織及び体液がシェーバのハンドピースに直接接触することが防止され、ハンドピースの洗浄及び滅菌をより簡素かつより有効にする。
【0024】
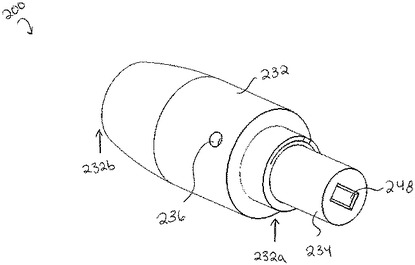
図12A〜12Cは、図11のコネクタ200をより詳細に示す。コネクタ200は切断アセンブリ及びシェーバのハンドピース400に接合することができ、組織をハンドピース400から迂回させることができる。図示した実施形態では、コネクタ200は、管形の外側ハブ232及び内側ハブ234を含む実質的に円筒形の構成要素である。外側ハブ232及び内側ハブ234は、切断アセンブリをシェーバのハンドピース400に操作可能に接続し、組織がシェーバのハンドピース400と接触することを防止する。外側ハブ232は、組織がハンドピース400に入り込むことを迂回するための出口ポート236を更に含む。図12Aに示すように、外側ハブ232は、近位端232aと遠位端232bとの間に延びるルーメン244を有する。出口ポート236は、ルーメン244と外側ハブ232の外側壁との間に延びる。内側ハブ234は、流体が出口ポート236を通して強制的に流され、ハンドピース(図示せず)内に流れることが防止されるように、外側ハブ232内のルーメンの近位端を遮断する。出口ポート236の位置は様々であってもよいが、ハブが組み立てられた際、内側ハブ234が出口ポート236を塞がないように、外側ハブ232の近位端232aの近位方向であり、かつ内側ハブ234の遠位端234bの遠位方向に位置することが好ましい。当業者は、外側ハブ及び内側ハブが多様な異なる材料から形成されることができ、多様な構成を有し得ることを認識するであろう。
【0025】
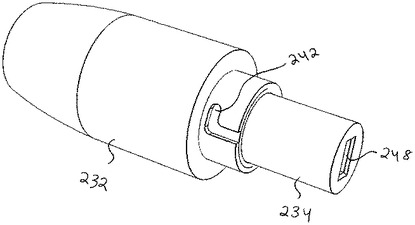
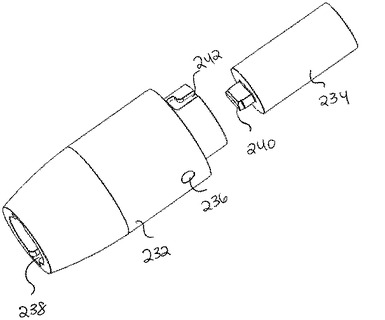
コネクタ200は、シェーバのハンドピース400と切断アセンブリとの間に配置されている仲介構成要素であるため、シェーバのハンドピース400内に配置されているドライバは、切断アセンブリと直接接合しないであろう。その代わりに、外側ハブ232及び内側ハブ234は、ハンドピース400内に配置されているドライバの作動により切断アセンブリが組織を切り取るように、ハンドピース400と切断アセンブリとの間で駆動力を伝えるように構成されている。図12B及び12Cに示すように、内側ハブ232は、シェーバのハンドピース400内に配置されているドライバに接合するためのドライバ接合機構248を近位端に含んでもよい。内側ハブ234は更に、例えばシャフト等の切断アセンブリの一部分に直接接合するための、図13に示す突出部240を遠位端234bに含んでもよい。代替的に、中間構成要素(図示せず)は、内側ハブ234の回転が切断アセンブリを回転させるように、内側ハブ234を切断アセンブリに連結してもよい。図12A〜14はまた、シェーバのハンドピース400上の対応する機構に接合し得る2つの接合機構242を有する外側ハブ232も示す。図示した実施形態では、ハンドピース400はハブ230の近位端230aに向かって案内されてもよく、ハンドピース400の遠位部分はスロット247a内に嵌合されてもよい。ハンドピース400は更に、ハンドピース400を捻りロックし、コネクタ200に取り付けることができるように、接合機構242に対応する突出部を含んでもよい。図13は、構成要素をより詳細に示す、コネクタ200の分解図である。当業者は、コネクタが多様な構成を有することができ、コネクタを切断アセンブリ及びシェーバのハンドピースと連結するよう構成されている多様な接合機構を含み得ることを認識するであろう。
【0026】
図14に示すように、外側ハブ232はその遠位端232b上に、切断アセンブリに接合するための接合要素238を含んでもよい。図示した実施形態では、接合要素238は、外側ハブ232の内側壁内に形成されている実質的にL形の凹部である。切断アセンブリ上の対応する突出部は接合要素238に係合することができ、切断アセンブリは捻りロックを用いて外側ハブ232に取り付けられてもよい。切断アセンブリの一部分はまた、下記に詳細に論じられるように、外側ハブ232内に形成されているスロット247b内に嵌合して、外側ハブ232に対する、したがってコネクタ200に対する切断アセンブリの回転を可能にし得る。当業者は、切断アセンブリが、当技術分野にて既知の様々な他の手段によりコネクタに取り付けることができることを認識するであろう。
【0027】
図14はまた、プレス嵌めによって外側ハブ232に接合されている内側ハブ234の断面を示す。内側ハブ234は、例えば溶接、接着剤、機械的係合等の当技術分野にて既知の様々な他の接合技術によって外側ハブ232に接合することができる。図示した実施形態では、内側ハブ234は、出口ポート236が内側ハブ234により塞がれないように配置されている。切断アセンブリが外側ハブ232に取り付けられた際、外側ハブ232の内側ルーメン244内に、組織及び/又は流体が内側ルーメン244を通して、出口ポート236を通して外部に流れるための空間が存在することが好ましい。加えて、内側ハブ234の突出部240は、出口ポート236の近位方向の位置にて終結して、組織及び流体が出口ポート236を通して容易に流れるようにすることが好ましい。当業者は、ルーメン244に対する出口ポート236の角度が様々であってもよく、例えば出口ポート236はルーメン244に直交して延びてもよく、又は鋭角若しくは鈍角で延びてもよいことを認識するであろう。
【0028】
図11の関節鏡シェーバは、図1に示した実施形態と同様に機能する。使用時、組織シェーバ20の切断アセンブリ(図示せず)は、患者内に形成された切開創内に挿入されてもよい。切断アセンブリの位置は、例えばX線イメージング等の当技術分野にて既知の多様な可視化技術を用いて監視され得る。吸引は、コネクタ200内に配置されている出口ポート236において切断アセンブリに適用されてもよい。適用された吸引は、切断部材に隣接する組織を、切断部材のそれぞれの開口部を通して引き込み、そして内側ルーメン内に引き込む。シェーバのハンドピース400上のアクチュエータ410を押圧して、切断アセンブリが、例えば内側切断要素及び外側切断要素の回転によって、切断アセンブリの内側ルーメン内に配置されている組織を切り取るようにしてもよい。ドライバの作動は、内側ハブ234を外側ハブ232に対して回転させる。内側ハブ234は切断アセンブリの内側シャフトに操作可能に結合している突出部240を有するため、内側ハブ234の回転が内側シャフトを外側ハブ及び外側シャフトに対して回転させ、それによって組織を切り取る。切断された組織及び/又は流体は、切断アセンブリのルーメンを通して流れ、そしてコネクタ200の外側ハブ232内に形成された出口ポート236を通して外部に流れる。シェーバのハンドピース400内の内側ルーメンを通して組織及び/又は流体を流すのではなく、コネクタ200がこの物質をシェーバのハンドピース400から迂回させ、出口ポート236を通して外部に流す。組織及び流体がハンドピース400に入り込むことが防止されるため、ハンドピース400は洗浄がより容易であり、手術部位を二次感染させる危険性が低減される。切断された組織及び/又は流体は、好適な廃棄物収集容器内に収集されてもよく、所望の量の組織が手術部位から切除される迄、プロセスが反復されてもよい。図1に示した実施形態と同様に、手技が完了した後、切断アセンブリをコネクタ200から除去し、廃棄してもよく、コネクタ200をシェーバのハンドピース400から除去してもよい。シェーバのハンドピース400及び/又はコネクタ200は、所望であれば洗浄して再使用されてもよい。
【0029】
当業者に認識されるように、提供された組織シェーバは、非限定的な例として、肩、腰、手首、膝及び脊椎を含む身体内の様々な領域から組織を除去するのに使用することができる。
【0030】
上述の実施形態に基づいた本発明の更なる特徴及び利点が、当業者には明らかとなろう。したがって、本発明は、添付の特許請求の範囲によって指定する場合を除いて、具体的に図示し説明した内容によって限定されるものではない。本明細書で引用されたすべての刊行物及び文献は、すべての内容が参照によって明らかに本願に組み込まれる。
【0031】
〔実施の態様〕
(1) 組織切断アセンブリであって、
その遠位端上に外側切断先端部が形成されている外側シャフトと、
前記外側シャフト内に回転可能に配置され、ドライバに結合するように構成されている内側シャフトであって、その遠位端上に内側組織切断先端部が形成されている、該内側シャフトと、
前記内側シャフト及び前記外側シャフトに結合され、内部にドライバが配置されている取っ手アセンブリと解放可能に接合するように構成されているハブであって、該ハブが取っ手アセンブリに結合された際、流体が取っ手アセンブリと接触することを防止するように構成されている、該ハブと、
を含み、前記外側組織切断先端部及び前記内側組織切断先端部により切断された組織が、前記内側シャフトを通して流れるように構成されている、組織切断アセンブリ。
(2) 更に出口ポートを含み、該出口ポートは流体及び組織が該出口ポートを通して通過することを可能にするよう構成され、該出口ポートは流体及び組織が前記切断アセンブリの近位端を通して外部に流れることを防止するように配置されている、実施態様1に記載の組織切断アセンブリ。
(3) 前記ハブが、取っ手アセンブリ内に配置されているドライバに解放可能に結合するためのドライバ接合機構を含む、実施態様1に記載の組織切断アセンブリ。
(4) 前記ハブが、取っ手アセンブリに解放可能に結合するための取っ手接合機構を含む、実施態様1に記載の組織切断アセンブリ。
(5) 前記内側シャフトが少なくとも1つのポートを含み、前記ポートは、流体及び組織が該ポートを通して通過することを可能にするように構成されている、実施態様1に記載の組織切断アセンブリ。
(6) 前記出口ポートが、前記ハブの近位端上に形成されている前記ドライバ接合機構の遠位方向に配置されている、実施態様3に記載の組織切断アセンブリ。
(7) 前記出口ポートが、前記内側シャフト及び前記外側シャフトの中心軸線の横断方向に延びる中心軸線を有する、実施態様2に記載の組織切断アセンブリ。
(8) 前記ハブの遠位端が、前記内側シャフトの近位端に接合される、実施態様1に記載の組織切断アセンブリ。
(9) 前記ハブは、前記ドライバが前記内側シャフトを前記外側シャフトに対して回転させるのに有効なように、ドライバと接合するように構成されている、実施態様3に記載の組織切断アセンブリ。
(10) 関節鏡組織シェーバ装置であって、
内部にドライバが配置されている取っ手と、
外側シャフト及び内側シャフトを有するシャフトアセンブリであって、該内側シャフトは該外側シャフト内に回転可能に配置され、該内側シャフト及び該外側シャフトは、それらの遠位端に形成されている少なくとも1つの開口部を有し、該内側シャフトは、該外側シャフト内の前記少なくとも1つの開口部に隣接して配置されている、前記開口部を通して露出された組織を切断するための組織切断遠位先端部を有する、シャフトアセンブリと、
前記取っ手と前記シャフトアセンブリとの間に操作可能に接続されて、駆動力を前記ドライバから前記内側シャフトへ伝える連結器であって、前記内側シャフトの内側ルーメンからの流体を受容するための、内部に形成された出口ポートを有し、該流体が前記内側シャフトの前記内側ルーメンから前記取っ手へと通過することを防止するように構成されている、連結器と、
を含む、装置。
【0032】
(11) 前記連結器が、前記ドライバの作動が前記内側シャフトを回転させるのに有効であるように、前記取っ手内の前記ドライバに接合する近位端と、前記内側シャフトの近位端に接合する遠位端とを含む、実施態様10に記載の装置。
(12) 前記連結器が、前記取っ手及び前記シャフトアセンブリに除去可能に接続されている、実施態様10に記載の装置。
(13) 前記シャフトアセンブリが、前記連結器とプレス嵌めされるように構成されている、実施態様10に記載の装置。
(14) 前記シャフトアセンブリ及び前記連結器が一体形成されている、実施態様10に記載の装置。
(15) 前記連結器は、内部に形成されている内側ルーメンを有し、該内側ルーメンは、前記内側シャフトの前記内側ルーメンと連絡する第1の末端部と、前記出口ポートと連絡する第2の末端部とを有する、実施態様10に記載の装置。
(16) 前記連結器の前記内側ルーメンが、前記連結器の近位端の遠位方向の位置にて終結する、実施態様15に記載の装置。
(17) 組織シェーバと共に使用されるコネクタであって、
近位端及び遠位端を有するハウジングであって、該近位端は、前記組織シェーバの取っ手内に配置されているドライバに結合するための駆動機構を有し、該遠位端は、組織シェーバの内側シャフトの近位端上の対応する駆動機構に結合するための駆動機構を有し、該ハウジングは更に、内部に形成されているルーメンを有し、該ルーメンは、組織シェーバの内側シャフトからの流体を受容するための、前記ハウジングの前記遠位端内に形成されている入口ポートと、流体を組織シェーバの取っ手から離れるよう指向させるための、前記ハウジングの前記近位端の遠位方向の位置にて前記ハウジングの側壁内に形成されている出口ポートとの間に延びる、前記ハウジングを含む、コネクタ。
(18) 前記ハウジングの前記近位端が、前記近位端上に形成され、かつ組織シェーバの取っ手とプレス嵌めされるよう構成されている第1の接合機構を有し、前記ハウジングの前記遠位端が、前記遠位端上に形成され、かつ組織シェーバのシャフトアセンブリとプレス嵌めされるように構成されている第2の接合機構を有する、実施態様17に記載のコネクタ。
(19) 前記ハウジングの前記近位端は密封されて、前記ハウジング内の前記ルーメンを通して流れる組織及び流体が、前記ハウジングに接合している組織シェーバの取っ手と接触することを防止する、実施態様17に記載のコネクタ。
(20) 前記ルーメンが実質的にL形である、実施態様17に記載のコネクタ。
【特許請求の範囲】
【請求項1】
組織切断アセンブリであって、
その遠位端上に外側切断先端部が形成されている外側シャフトと、
前記外側シャフト内に回転可能に配置され、ドライバに結合するように構成されている内側シャフトであって、その遠位端上に内側組織切断先端部が形成されている、該内側シャフトと、
前記内側シャフト及び前記外側シャフトに結合され、内部にドライバが配置されている取っ手アセンブリと解放可能に接合するように構成されているハブであって、該ハブが取っ手アセンブリに結合された際、流体が取っ手アセンブリと接触することを防止するように構成されている、該ハブと、
を含み、前記外側組織切断先端部及び前記内側組織切断先端部により切断された組織が、前記内側シャフトを通して流れるように構成されている、組織切断アセンブリ。
【請求項2】
更に出口ポートを含み、該出口ポートは流体及び組織が該出口ポートを通して通過することを可能にするよう構成され、該出口ポートは流体及び組織が前記切断アセンブリの近位端を通して外部に流れることを防止するように配置されている、請求項1に記載の組織切断アセンブリ。
【請求項3】
前記ハブが、取っ手アセンブリ内に配置されているドライバに解放可能に結合するためのドライバ接合機構を含む、請求項1に記載の組織切断アセンブリ。
【請求項4】
前記ハブが、取っ手アセンブリに解放可能に結合するための取っ手接合機構を含む、請求項1に記載の組織切断アセンブリ。
【請求項5】
前記内側シャフトが少なくとも1つのポートを含み、前記ポートは、流体及び組織が該ポートを通して通過することを可能にするように構成されている、請求項1に記載の組織切断アセンブリ。
【請求項6】
前記出口ポートが、前記ハブの近位端上に形成されている前記ドライバ接合機構の遠位方向に配置されている、請求項3に記載の組織切断アセンブリ。
【請求項7】
前記出口ポートが、前記内側シャフト及び前記外側シャフトの中心軸線の横断方向に延びる中心軸線を有する、請求項2に記載の組織切断アセンブリ。
【請求項8】
前記ハブの遠位端が、前記内側シャフトの近位端に接合される、請求項1に記載の組織切断アセンブリ。
【請求項9】
前記ハブは、前記ドライバが前記内側シャフトを前記外側シャフトに対して回転させるのに有効なように、ドライバと接合するように構成されている、請求項3に記載の組織切断アセンブリ。
【請求項10】
関節鏡組織シェーバ装置であって、
内部にドライバが配置されている取っ手と、
外側シャフト及び内側シャフトを有するシャフトアセンブリであって、該内側シャフトは該外側シャフト内に回転可能に配置され、該内側シャフト及び該外側シャフトは、それらの遠位端に形成されている少なくとも1つの開口部を有し、該内側シャフトは、該外側シャフト内の前記少なくとも1つの開口部に隣接して配置されている、前記開口部を通して露出された組織を切断するための組織切断遠位先端部を有する、シャフトアセンブリと、
前記取っ手と前記シャフトアセンブリとの間に操作可能に接続されて、駆動力を前記ドライバから前記内側シャフトへ伝える連結器であって、前記内側シャフトの内側ルーメンからの流体を受容するための、内部に形成された出口ポートを有し、該流体が前記内側シャフトの前記内側ルーメンから前記取っ手へと通過することを防止するように構成されている、連結器と、
を含む、装置。
【請求項11】
前記連結器が、前記ドライバの作動が前記内側シャフトを回転させるのに有効であるように、前記取っ手内の前記ドライバに接合する近位端と、前記内側シャフトの近位端に接合する遠位端とを含む、請求項10に記載の装置。
【請求項12】
前記連結器が、前記取っ手及び前記シャフトアセンブリに除去可能に接続されている、請求項10に記載の装置。
【請求項13】
前記シャフトアセンブリが、前記連結器とプレス嵌めされるように構成されている、請求項10に記載の装置。
【請求項14】
前記シャフトアセンブリ及び前記連結器が一体形成されている、請求項10に記載の装置。
【請求項15】
前記連結器は、内部に形成されている内側ルーメンを有し、該内側ルーメンは、前記内側シャフトの前記内側ルーメンと連絡する第1の末端部と、前記出口ポートと連絡する第2の末端部とを有する、請求項10に記載の装置。
【請求項16】
前記連結器の前記内側ルーメンが、前記連結器の近位端の遠位方向の位置にて終結する、請求項15に記載の装置。
【請求項17】
組織シェーバと共に使用されるコネクタであって、
近位端及び遠位端を有するハウジングであって、該近位端は、前記組織シェーバの取っ手内に配置されているドライバに結合するための駆動機構を有し、該遠位端は、組織シェーバの内側シャフトの近位端上の対応する駆動機構に結合するための駆動機構を有し、該ハウジングは更に、内部に形成されているルーメンを有し、該ルーメンは、組織シェーバの内側シャフトからの流体を受容するための、前記ハウジングの前記遠位端内に形成されている入口ポートと、流体を組織シェーバの取っ手から離れるよう指向させるための、前記ハウジングの前記近位端の遠位方向の位置にて前記ハウジングの側壁内に形成されている出口ポートとの間に延びる、前記ハウジングを含む、コネクタ。
【請求項18】
前記ハウジングの前記近位端が、前記近位端上に形成され、かつ組織シェーバの取っ手とプレス嵌めされるよう構成されている第1の接合機構を有し、前記ハウジングの前記遠位端が、前記遠位端上に形成され、かつ組織シェーバのシャフトアセンブリとプレス嵌めされるように構成されている第2の接合機構を有する、請求項17に記載のコネクタ。
【請求項19】
前記ハウジングの前記近位端は密封されて、前記ハウジング内の前記ルーメンを通して流れる組織及び流体が、前記ハウジングに接合している組織シェーバの取っ手と接触することを防止する、請求項17に記載のコネクタ。
【請求項20】
前記ルーメンが実質的にL形である、請求項17に記載のコネクタ。
【請求項1】
組織切断アセンブリであって、
その遠位端上に外側切断先端部が形成されている外側シャフトと、
前記外側シャフト内に回転可能に配置され、ドライバに結合するように構成されている内側シャフトであって、その遠位端上に内側組織切断先端部が形成されている、該内側シャフトと、
前記内側シャフト及び前記外側シャフトに結合され、内部にドライバが配置されている取っ手アセンブリと解放可能に接合するように構成されているハブであって、該ハブが取っ手アセンブリに結合された際、流体が取っ手アセンブリと接触することを防止するように構成されている、該ハブと、
を含み、前記外側組織切断先端部及び前記内側組織切断先端部により切断された組織が、前記内側シャフトを通して流れるように構成されている、組織切断アセンブリ。
【請求項2】
更に出口ポートを含み、該出口ポートは流体及び組織が該出口ポートを通して通過することを可能にするよう構成され、該出口ポートは流体及び組織が前記切断アセンブリの近位端を通して外部に流れることを防止するように配置されている、請求項1に記載の組織切断アセンブリ。
【請求項3】
前記ハブが、取っ手アセンブリ内に配置されているドライバに解放可能に結合するためのドライバ接合機構を含む、請求項1に記載の組織切断アセンブリ。
【請求項4】
前記ハブが、取っ手アセンブリに解放可能に結合するための取っ手接合機構を含む、請求項1に記載の組織切断アセンブリ。
【請求項5】
前記内側シャフトが少なくとも1つのポートを含み、前記ポートは、流体及び組織が該ポートを通して通過することを可能にするように構成されている、請求項1に記載の組織切断アセンブリ。
【請求項6】
前記出口ポートが、前記ハブの近位端上に形成されている前記ドライバ接合機構の遠位方向に配置されている、請求項3に記載の組織切断アセンブリ。
【請求項7】
前記出口ポートが、前記内側シャフト及び前記外側シャフトの中心軸線の横断方向に延びる中心軸線を有する、請求項2に記載の組織切断アセンブリ。
【請求項8】
前記ハブの遠位端が、前記内側シャフトの近位端に接合される、請求項1に記載の組織切断アセンブリ。
【請求項9】
前記ハブは、前記ドライバが前記内側シャフトを前記外側シャフトに対して回転させるのに有効なように、ドライバと接合するように構成されている、請求項3に記載の組織切断アセンブリ。
【請求項10】
関節鏡組織シェーバ装置であって、
内部にドライバが配置されている取っ手と、
外側シャフト及び内側シャフトを有するシャフトアセンブリであって、該内側シャフトは該外側シャフト内に回転可能に配置され、該内側シャフト及び該外側シャフトは、それらの遠位端に形成されている少なくとも1つの開口部を有し、該内側シャフトは、該外側シャフト内の前記少なくとも1つの開口部に隣接して配置されている、前記開口部を通して露出された組織を切断するための組織切断遠位先端部を有する、シャフトアセンブリと、
前記取っ手と前記シャフトアセンブリとの間に操作可能に接続されて、駆動力を前記ドライバから前記内側シャフトへ伝える連結器であって、前記内側シャフトの内側ルーメンからの流体を受容するための、内部に形成された出口ポートを有し、該流体が前記内側シャフトの前記内側ルーメンから前記取っ手へと通過することを防止するように構成されている、連結器と、
を含む、装置。
【請求項11】
前記連結器が、前記ドライバの作動が前記内側シャフトを回転させるのに有効であるように、前記取っ手内の前記ドライバに接合する近位端と、前記内側シャフトの近位端に接合する遠位端とを含む、請求項10に記載の装置。
【請求項12】
前記連結器が、前記取っ手及び前記シャフトアセンブリに除去可能に接続されている、請求項10に記載の装置。
【請求項13】
前記シャフトアセンブリが、前記連結器とプレス嵌めされるように構成されている、請求項10に記載の装置。
【請求項14】
前記シャフトアセンブリ及び前記連結器が一体形成されている、請求項10に記載の装置。
【請求項15】
前記連結器は、内部に形成されている内側ルーメンを有し、該内側ルーメンは、前記内側シャフトの前記内側ルーメンと連絡する第1の末端部と、前記出口ポートと連絡する第2の末端部とを有する、請求項10に記載の装置。
【請求項16】
前記連結器の前記内側ルーメンが、前記連結器の近位端の遠位方向の位置にて終結する、請求項15に記載の装置。
【請求項17】
組織シェーバと共に使用されるコネクタであって、
近位端及び遠位端を有するハウジングであって、該近位端は、前記組織シェーバの取っ手内に配置されているドライバに結合するための駆動機構を有し、該遠位端は、組織シェーバの内側シャフトの近位端上の対応する駆動機構に結合するための駆動機構を有し、該ハウジングは更に、内部に形成されているルーメンを有し、該ルーメンは、組織シェーバの内側シャフトからの流体を受容するための、前記ハウジングの前記遠位端内に形成されている入口ポートと、流体を組織シェーバの取っ手から離れるよう指向させるための、前記ハウジングの前記近位端の遠位方向の位置にて前記ハウジングの側壁内に形成されている出口ポートとの間に延びる、前記ハウジングを含む、コネクタ。
【請求項18】
前記ハウジングの前記近位端が、前記近位端上に形成され、かつ組織シェーバの取っ手とプレス嵌めされるよう構成されている第1の接合機構を有し、前記ハウジングの前記遠位端が、前記遠位端上に形成され、かつ組織シェーバのシャフトアセンブリとプレス嵌めされるように構成されている第2の接合機構を有する、請求項17に記載のコネクタ。
【請求項19】
前記ハウジングの前記近位端は密封されて、前記ハウジング内の前記ルーメンを通して流れる組織及び流体が、前記ハウジングに接合している組織シェーバの取っ手と接触することを防止する、請求項17に記載のコネクタ。
【請求項20】
前記ルーメンが実質的にL形である、請求項17に記載のコネクタ。
【図1】


【図2】

【図3】
【図4A】

【図4B】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7A】
【図7B】
【図8】
【図9】
【図10】

【図11】

【図12A】

【図12B】
【図12C】
【図13】
【図14】
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7A】
【図7B】
【図8】
【図9】
【図10】
【図11】
【図12A】
【図12B】
【図12C】
【図13】
【図14】
【公開番号】特開2013−52242(P2013−52242A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−191340(P2012−191340)
【出願日】平成24年8月31日(2012.8.31)
【出願人】(507083478)デピュイ・ミテック・エルエルシー (47)
【住所又は居所原語表記】325 Paramount Drive,Raynham,Massachusetts 02767 United States of America
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−191340(P2012−191340)
【出願日】平成24年8月31日(2012.8.31)
【出願人】(507083478)デピュイ・ミテック・エルエルシー (47)
【住所又は居所原語表記】325 Paramount Drive,Raynham,Massachusetts 02767 United States of America
【Fターム(参考)】
[ Back to top ]