
経路探索装置、経路探索方法、およびプログラム
【課題】 ハイブリッド車や電気自動車等のように電力を回生可能な車両にとって燃費の良い経路を探索できる経路探索装置を提供する。
【解決手段】
本発明の経路探索装置1は、道路を複数のリンクにより示した地図データと、それぞれのリンクに対して付与された電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部14と、現在位置を検出する現在位置検出部10と、目的地の入力を受け付ける目的地入力部12と、現在位置から目的地までの複数の候補経路を構成するリンクに付与されたコスト変数値を地図データ記憶部14から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算する経路コスト算出部16と、経路コスト算出部16における計算結果に基づき、候補経路の中で経路コストが最小となる経路を出力する経路出力部18とを備える。
【解決手段】
本発明の経路探索装置1は、道路を複数のリンクにより示した地図データと、それぞれのリンクに対して付与された電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部14と、現在位置を検出する現在位置検出部10と、目的地の入力を受け付ける目的地入力部12と、現在位置から目的地までの複数の候補経路を構成するリンクに付与されたコスト変数値を地図データ記憶部14から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算する経路コスト算出部16と、経路コスト算出部16における計算結果に基づき、候補経路の中で経路コストが最小となる経路を出力する経路出力部18とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、出発地から目的地までの経路を探索する経路探索装置に関する。
【背景技術】
【0002】
従来から、出発地から目的地までの最適経路を探索する経路探索装置として、様々な装置が提案されており、また製品化されている。特許文献1は、車種やドライバの運転の癖を反映し、燃料消費量が最小となる経路を探索する経路探索装置を開示している。この文献に記載された経路探索装置は、車種情報とドライバ毎の車両加速時の加速度合いに関する情報の少なくともどちらか1つを記憶しており、この情報を用いて、一般的な車両の燃費情報を補正する。そして、経路探索装置は、補正された燃費情報を用いて、車両が各リンクを走行した際の燃料消費量に相当するコストを計算し、出発地から目的地までの経路のうち、コストの加算値が最小となる経路を探索する。
【特許文献1】特開2006−300780号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記したように、従来の経路探索装置の中には、燃料消費を最小とすることに着目した装置も存在する。従来の自動車では、燃料消費を抑えることが燃費の向上につながっていた。
【0004】
最近では、ハイブリッド車や電気自動車が普及し始めている。ハイブリッド車や電気自動車では、走行中に電力を回生できるので、燃料消費を抑えることだけが燃費の向上につながるわけではない。
【0005】
そこで、本発明は、上記背景に鑑み、ハイブリッド車や電気自動車等のように電力を回生可能な車両にとって燃費の良い経路を探索できる経路探索装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の経路探索装置は、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部と、出発地と目的地を設定する地点設定部と、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算する経路コスト算出部と、前記経路コスト算出部における計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力する経路出力部とを備える。
【0007】
このように経路コストを計算するためのコスト変数として電力回生に関するコスト変数を導入することにより、走行中に電力を回生できる経路、すなわち、ハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【0008】
前記電力回生に関するコスト変数値としては、各リンクを走行したときの電力回生量を示すデータ、または、各リンクの走行により電力回生を行えるか否かを示すデータを用いることができる。
【0009】
本発明の経路探索装置は、車両の現在位置を検出する現在位置検出部と、電力回生量を検出するセンサから電力回生量を示すデータを受信する電力回生量データ受信部と、前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を前記電力回生量データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備える。
【0010】
この構成により、実際の車両の走行での電力回生量の測定データに基づいて、電力回生に関するコスト変数値を適切に求めることができる。
【0011】
本発明の経路探索装置は、各リンクにおける電力回生量のデータを含むプローブ交通情報を受信する交通情報受信部と、前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備えてもよい。
【0012】
この構成により、多数の車両から収集された電力回生量の測定データに基づいて、電力回生に関するコスト変数値を適切に決定することができる。
【0013】
本発明の経路探索装置において、前記電力回生に関するコスト変数値として、各リンクにおいて減速しながら走行した距離を示すデータを用いることができ、加えて、各リンクにおいて減速したときの負の加速度を示すデータを用いることができる。
【0014】
車両が電力を回生することができるのは車両が減速したときなので、減速しながら走行した距離は電力回生量と相関関係を有する。従って、減速しながら走行した距離を電力回生に関するコスト変数として用いることができる。また、車両が急激に減速する場合よりも緩やかに減速する場合の方が効率良く電力を回生できるので、減速時の負の加速度を示すデータをコスト変数として用いることにより、電力回生量を適切に予測することができる。
【0015】
本発明の経路探索装置は、車両の現在位置を検出する現在位置検出部と、車両の走行速度を検出するセンサから走行速度を示すデータを受信する速度データ受信部と、前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの前記電力回生に関するコスト変数値を前記速度データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備えてもよい。
【0016】
この構成により、実際の車両の走行における速度の測定データに基づいて、電力回生に関するコスト変数値を適切に決定することができる。
【0017】
本発明の経路探索装置は、渋滞しているか否かを判定する判定部を備え、前記地図データ更新部は、前記判定部にて渋滞していないと判定されたときに取得した速度データに基づいて前記コスト変数値を求めてもよい。
【0018】
渋滞しているときには、前方車両との車間距離を一定に保つために、こまめにブレーキをかける場合があるため、電力回生が可能かどうかを判断するための適切なデータを得ることが難しい。本発明によれば、渋滞していないときの速度データを用いて適切なコスト変数値を決定できる。
【0019】
本発明の経路探索装置は、各リンクにおける車両の速度データを含むプローブ交通情報を受信する交通情報受信部と、前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備えてもよい。
【0020】
この構成により、多数の車両から収集された電力回生量の測定データに基づいて、電力回生に関するコスト変数値を適切に決定することができる。
【0021】
本発明の経路探索装置の前記地図データ記憶部には、各リンクにおける太陽発電量を示すデータを記憶してもよい。
【0022】
このように経路探索に用いるコスト変数として太陽発電量に関するコスト変数を導入することにより、発電量の大きい燃費の良い経路、すなわち燃費の良い経路を探索することができる。
【0023】
本発明の経路探索方法は、出発地から目的地までの経路を経路探索装置によって探索する方法であって、前記経路探索装置が、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部を準備するステップと、前記経路探索装置が、出発地と目的地を設定するステップと、前記経路探索装置が、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、前記経路探索装置が、前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップとを備える。
【0024】
本発明のコスト変数値の決定方法は、車両に搭載された経路探索装置によって、経路探索に用いるためのコスト変数値を決定する方法であって、経路探索装置が、車両の現在位置を検出するステップと、経路探索装置が、電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップとを備える。
【0025】
本発明のプログラムは、出発地から目的地までの経路を求めるために、コンピュータに、出発地と目的地を設定するステップと、道路を複数のリンクにより示した地図データとそれぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部から、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップとを実行させる。
【0026】
本発明のプログラムは、経路探索に用いるためのコスト変数値を決定するために、コンピュータに、車両の現在位置の検出するセンサから、車両の現在位置のデータを受信するステップと、電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップとを実行させる。
【発明の効果】
【0027】
本発明によれば、経路探索に用いるコスト変数として、電力回生に関するコスト変数を導入することにより、走行中に電力を回生できる経路、すなわちハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【発明を実施するための最良の形態】
【0028】
以下、本発明の実施の形態の経路探索装置について図面を参照しながら説明する。以下の説明では、経路探索装置をナビゲーション装置に適用した例について説明する。
(第1の実施の形態)
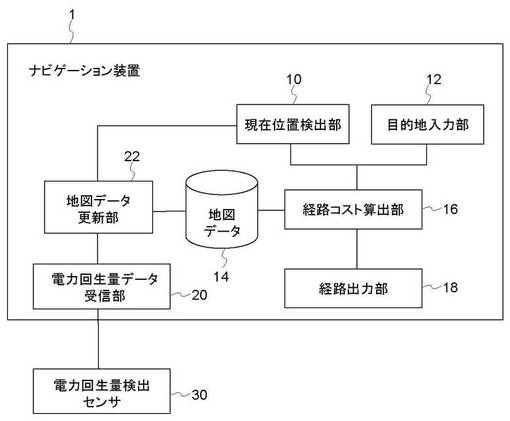
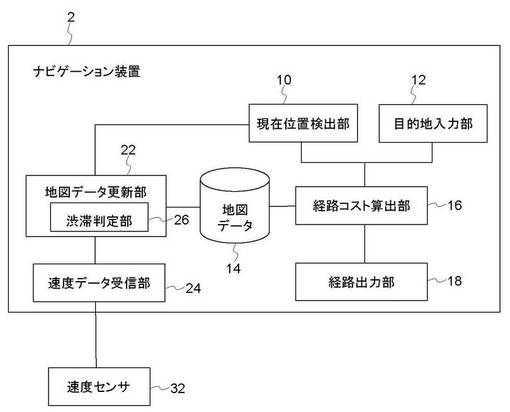
図1は、本発明の第1の実施の形態のナビゲーション装置1の構成を示す図である。本実施の形態のナビゲーション装置1は、ハイブリッド車両または電気自動車に搭載して用いられる。ナビゲーション装置1は、車両の現在位置を検出する現在位置検出部10と、目的地の入力を受け付ける目的地入力部12と、道路地図等のデータを記憶した地図データ記憶部14と、現在位置から目的地までの経路の経路コストを計算する経路コスト算出部16と、経路コスト算出部16にて計算された経路コストが最小となる経路を出力する経路出力部18とを有している。
【0029】
本実施の形態では、出発地として、現在位置検出部10にて検出した車両の現在位置のデータを用い、現在位置から目的地までの経路を探索する例を説明する。現在位置検出部10および目的地入力部12は、請求項に記載の「地点設定部」に該当する。なお、本発明は、必ずしも現在位置を出発地として用いる必要はなく、ドライバが手動で出発地を入力することとしてもよい。
【0030】
現在位置検出部10は、例えば、車両の絶対方位を検出するための地磁気センサ、車両の相対方位を検出するためのジャイロスコープ、車両の走行距離を検出する距離センサ、および衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機を有している。これらのセンサ等はそれぞれが性質の異なる誤差を持っているため、複数のセンサ等により各々を補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部のセンサで現在位置検出部10を構成してもよいし、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0031】
目的地入力部12は、ドライバから電話番号や住所等の入力を受け付けることによって目的地の設定を受け付ける。
【0032】
地図データ記憶部14は、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応する複数種類のコスト変数値を記憶している。
【0033】
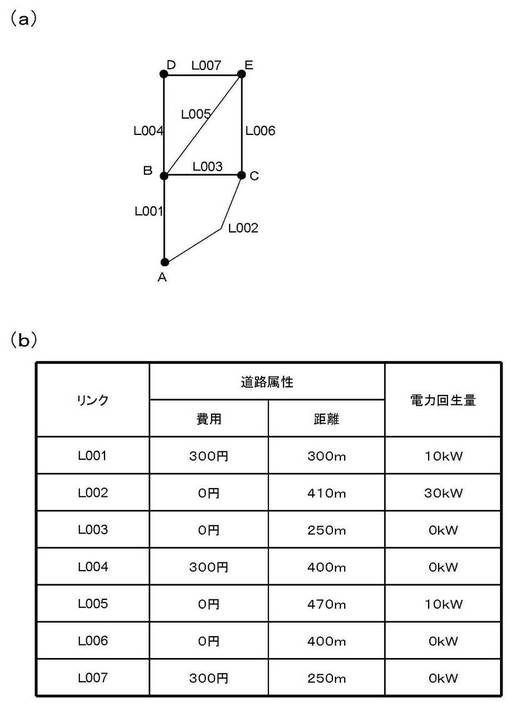
図2(a)および図2(b)は、地図データ記憶部14に記憶されているコスト変数値の例を示す図である。図2(a)に示すように、地図データ記憶部14は、道路をノードA〜ノードE、リンクL001、L002等で表現したデータを記憶している。
【0034】
図2(b)に示すように、地図データ記憶部14は、道路属性として費用、距離のデータを記憶すると共に、そのリンクを走行したときに回生できる回生電力量を記憶している。費用、距離および回生電力量がコスト変数に相当し、記憶されたそれぞれのデータがコスト変数値に相当する。
【0035】
経路コスト算出部16が、経路コストを求める際には、表現形式の異なる費用、距離、電力回生量の各コスト変数値を統一的に扱える表現形式(ここでは単に「コスト」という)に変換する。
【0036】
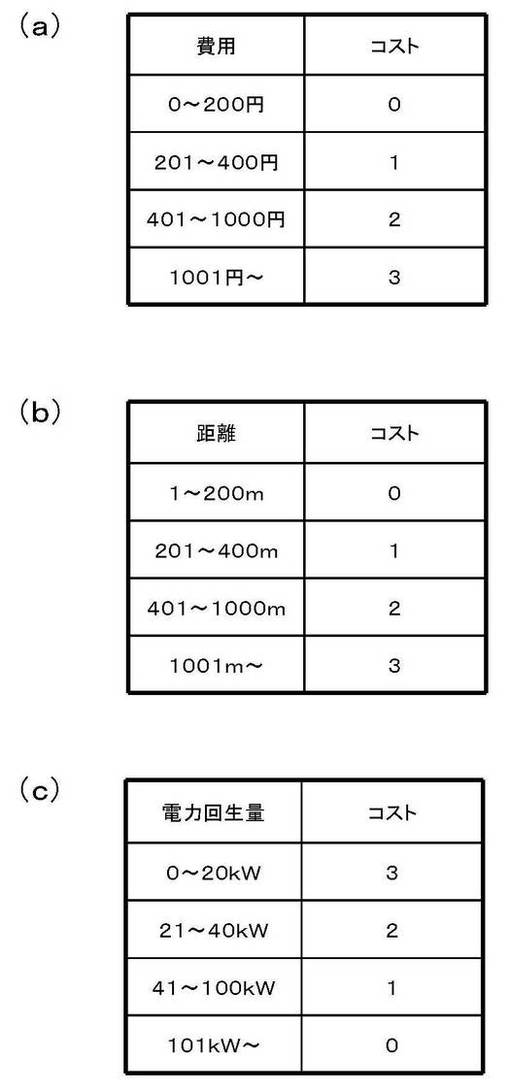
図3(a)〜(c)は、費用、距離、電力回生量のそれぞれをコストに変換するテーブルの例を示す図である。費用、距離は大きくなれば、そのリンクは選択されにくくなるので、テーブルは、図3(a)、図3(b)に示すように費用、距離が増大するに従ってコストが大きくなるように設定されている。回生電力量については、回生電力量が大きくなれば、そのリンクは選択されやすくなるので、テーブルは、図3(c)に示すように、回生電力量が大きくなるに従ってコストが小さくなるように設定されている。
【0037】
経路コスト算出部16は、複数種類のそれぞれのコスト変数値を変換したコストを合計してリンクコストを求め、候補経路を構成する全リンクのリンクコストを合計して経路全体の経路コストを計算する。
【0038】
なお、経路コスト算出部16は、リンクコストを求める際に、コスト変数の種類に応じて重み係数を乗じてもよい。重み係数の値は、ドライバがどのような観点で経路探索を行うかに応じて変更してもよい。例えば、ドライバが距離を優先して経路探索を行う場合には、距離のコスト変数値に乗じる重み係数を大きくし、ドライバが一般道(有料ではない)を優先して経路探索を行う場合には、費用のコスト変数値に乗じる重み係数を大きくする等のように重み係数の値を変更してもよい。
【0039】
次に、各リンクを走行したときに回生される回生電力量のデータを地図データ記憶部14に記憶させるための構成について説明する。ハイブリッド車、電気自動車には、電力回生量を検出する電力回生量検出センサ30が設けられている。ナビゲーション装置1は、電力回生量検出センサ30から送信される電力回生量のデータを受信する電力回生量データ受信部20と、電力回生量データ受信部20にて受信したデータとに基づいて地図データ記憶部14を更新する地図データ更新部22とを有している。
【0040】
地図データ更新部22は、電力回生量データ受信部20にて、電力回生量のデータを受信すると、現在位置検出部10にて検出した車両の現在位置と地図データ記憶部14に記憶された地図データとに基づいて、現在走行中のリンクを特定する。地図データ更新部22は、特定されたリンクに関連付けて記憶されている電力回生量と、電力回生量データ受信部20にて受信したデータとに基づいて当該リンクの電力回生量のコスト変数値を求め、当該コスト変数値によって地図データ記憶部14を更新する。地図データ更新部22は、更新前に記憶されていた電力回生量と受信した電力回生量との平均を求めて新たな電力回生量のコスト変数値としてもよいし、受信した電力回生量をそのまま新たなコスト変数値としてもよい。
【0041】
次に、第1の実施の形態のナビゲーション装置1の動作について説明する。ナビゲーション装置1の動作は、地図データ記憶部14に電力回生量を示すコスト変数値を記憶する段階と、地図データ記憶部14に記憶されたコスト変数値を用いて経路を探索する段階に分けることができる。
【0042】
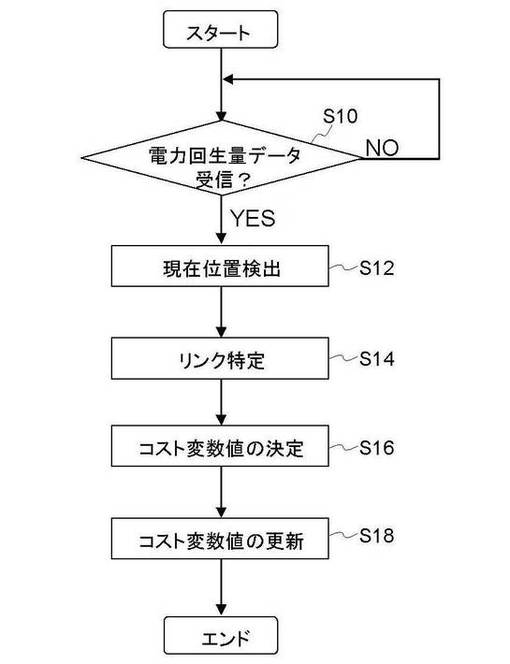
図4は、ナビゲーション装置1がコスト変数値を記憶する段階の動作を示す図である。ナビゲーション装置1は、電力回生量検出センサ30から送信される電力回生量のデータを受信したか否かを判定する(S10)。電力回生量データを受信していない場合には(S10でNO)、電力回生量データを受信するまで判定(S10)の処理を繰り返し行う。
【0043】
電力回生量データを受信した場合には(S10でYES)、ナビゲーション装置1は、車両の現在位置を検出し(S12)、検出された現在位置と地図データ記憶部14に記憶されたデータとに基づいて、現在走行中のリンクを特定する(S14)。
【0044】
続いて、ナビゲーション装置1は、受信した電力回生量データと地図データ記憶部14に記憶されている電力回生量データとに基づいて、地図データ記憶部14に記憶する新たな電力回生量のコスト変数値を求め(S16)、当該コスト変数値によって地図データ記憶部14を更新する(S18)。ナビゲーション装置1は、以上の動作により、自車両によって電力を回生した電力回生量の測定データに基づき、地図データ記憶部14に電力回生量のコスト変数値を新規に記憶または更新することができる。
【0045】
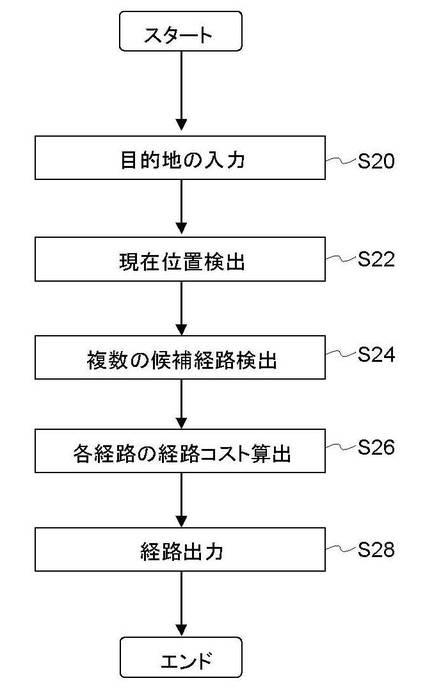
図5は、ナビゲーション装置1が経路探索を行う段階の動作を示す図である。ナビゲーション装置1は、ドライバから入力される目的地の設定を受け付ける(S20)。次に、ナビゲーション装置1は、現在位置検出部10により車両の現在位置を検出し(S22)、検出した現在位置を出発地として現在位置から目的地までの経路探索を行う。
【0046】
ナビゲーション装置1は、現在位置から目的地までの複数の候補経路を検出する(S24)。次に、ナビゲーション装置1は、地図データ記憶部14に記憶されたコスト変数値を用いて、各候補経路の経路コストを計算し(S26)、計算結果に基づいて経路コストが最小となる候補経路を案内経路として出力する(S28)。以上、第1の実施の形態のナビゲーション装置1について説明した。
【0047】
第1の実施の形態のナビゲーション装置1は、それぞれのリンクを走行するときに回生される回生電力量をコスト変数として経路探索を行うので、電力の回生量の多い経路、すなわち、ハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【0048】
また、第1の実施の形態のナビゲーション装置1は、自車両の走行中に電力を回生した電力回生量の測定データに基づいて、それぞれのリンクの回生電力量を求めているので、車種の違いやドライバの運転の癖などを織り込んだ電力回生量をコスト変数値として記憶することができる。
【0049】
なお、本実施の形態では、地図データ記憶部14は、リンクを走行したときに回生できる回生電力量のデータをコスト変数値として記憶する例について説明したが、地図データ記憶部14は、電力回生を行えたか否かを示すデータをコスト変数値としてもよい。電力回生を行えたか否かを示すデータによっても、電力回生を行えるリンクを多く含む経路を探索することにより、燃費の良い経路を案内することができる。
【0050】
(第2の実施の形態)
図6は、本発明の第2の実施の形態のナビゲーション装置2の構成を示す図である。第2の実施の形態のナビゲーション装置2の基本的な構成は第1の実施の形態のナビゲーション装置1と同じであるが、地図データ記憶部14に記憶された電力回生に関するコスト変数の内容が異なる。
【0051】
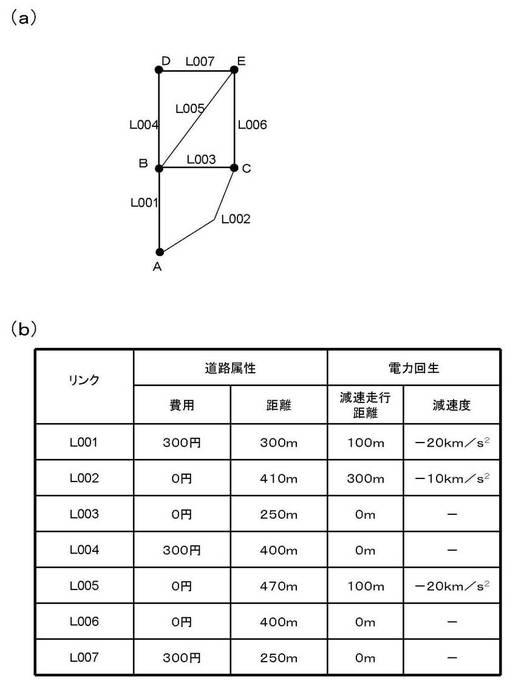
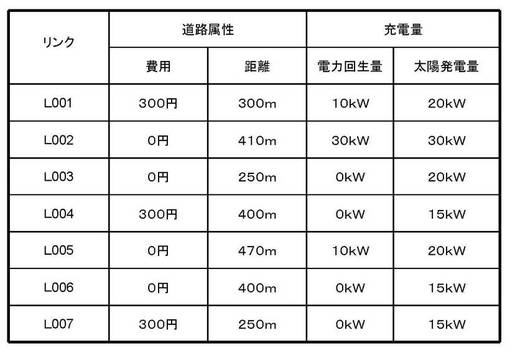
図7(a)および図7(b)は、地図データ記憶部14に記憶されているコスト変数値の例を示す図である。図7(a)は、図2(a)と同様に、道路のノードおよびリンクを示す。第2の実施の形態において、地図データ記憶部14は、図7(b)に示すように、電力回生に関するコスト変数として、減速走行距離と減速度を記憶している。減速走行距離は、車両が減速しながら走行した距離を示すデータであり、減速度は電力を回生する際の車両の負の加速度を示すデータである。
【0052】
第2の実施の形態のナビゲーション装置2は、減速走行距離および加速度のデータを取得する構成として、車両の走行速度を検出する速度センサから送信されるデータを受信する速度データ受信部24を有している。地図データ更新部22は、速度データ受信部24にて受信した車両の走行速度と現在位置検出部10にて検出された現在位置のデータとに基づいて、減速走行した距離と、そのときの減速度を計算により求める。また、第1の実施の形態の場合と同様に、現在位置検出部10にて検出した現在位置のデータに基づいて、車両が現在走行中のリンクを特定する。
【0053】
地図データ更新部22は、特定されたリンクに関連付けられて記憶されている減速走行距離および減速度と、受信したデータから求めた減速走行距離および減速度とに基づいて、当該リンクの減速走行距離および減速度のコスト変数値を求め、当該コスト変数値によって地図データ記憶部14を更新する。
【0054】
また、地図データ更新部22は、渋滞判定部26を有している。渋滞判定部26は、速度データ受信部24にて受信した速度データの推移から道路が渋滞しているか否かを判定する。具体的には、渋滞判定部26は、速度データが所定の範囲(例えば40km/h〜60km/h)で安定している場合には、渋滞していないと判定し、速度データが頻繁に0近くの値に落ち込む場合には、渋滞していると判定することができる。なお、本実施の形態では、渋滞判定部26は速度データの推移に基づいて渋滞判定を行っているが、例えば、VICSやプローブ等の交通情報に基づいて渋滞を判定することとしてもよい。
【0055】
地図データ更新部22は、渋滞判定部26にて渋滞しているか否かを判定した結果に基づいて、渋滞していないと判定されたときの速度データに基づいて減速走行距離および減速度を求め、渋滞していると判定されたときの速度データを使わない。
【0056】
次に、第2の実施の形態のナビゲーション装置2の動作について説明する。第2の実施の形態のナビゲーション装置2によって経路探索を行う動作は、経路コストの計算に用いるコスト変数値が異なるだけで、第1の実施の形態のナビゲーション装置1の動作と同じである。
【0057】
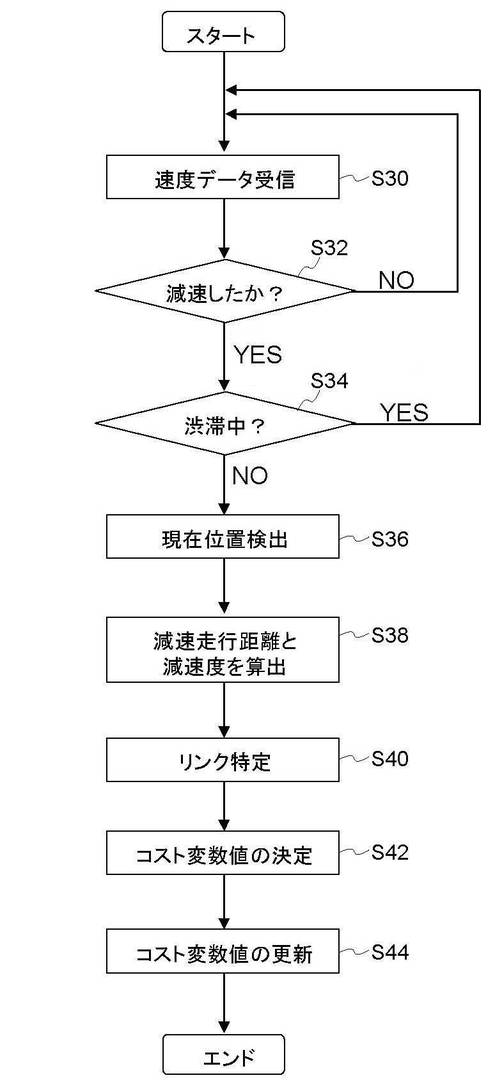
図8は、第2の実施の形態のナビゲーション装置2がコスト変数値を記憶する段階の動作を示す図である。ナビゲーション装置2は、車両の走行速度を検出する速度センサから速度データを受信すると(S30)、減速したか否かを判定する(S32)。車両が減速していないと判定された場合には(S32でNO)、ナビゲーション装置2は速度データを受信する処理に戻る(S30)。
【0058】
車両が減速したと判定された場合には(S32でYES)、ナビゲーション装置2は、渋滞判定部26にて渋滞しているか否かを判定する(S34)。渋滞していると判定された場合には(S34でYES)、ナビゲーション装置2は速度データを受信する処理に戻る(S34)。
【0059】
渋滞していないと判定された場合(S34でNO)、ナビゲーション装置2は、車両の現在位置を検出する(S36)。続いて、ナビゲーション装置2は、車両の現在位置のデータを用いて、減速が始まった地点から減速し終えた地点までの距離と、減速度(負の加速度)を算出する(S38)。次に、ナビゲーション装置2は、現在位置のデータと地図データ記憶部14に記憶されたデータとに基づいて、現在走行中のリンクを特定する(S40)。
【0060】
ナビゲーション装置2は、受信した速度データから求めた減速走行距離および減速度と地図データ記憶部14に記憶されている減速走行距離および減速度とに基づいて、地図データ記憶部14に記憶する新たな減速走行距離および減速度のコスト変数値を求め(S42)、当該コスト変数値によって地図データ記憶部14を更新する(S44)。ナビゲーション装置2は、以上の動作により、自車両の走行状況に基づき、地図データ記憶部14に減速走行距離および減速度のコスト変数値を新規に記憶または更新する。以上、第2の実施の形態のナビゲーション装置2の構成および動作について説明した。
【0061】
第2の実施の形態において地図データ記憶部14に記憶している減速走行距離および減速度のデータは、そのリンクにおいて回生可能な電力量と相関関係を有している。従って、減速走行距離および減速度をコスト変数として、経路探索を行うことにより、電力の回生量の多い経路、すなわち、ハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【0062】
また、第2の実施の形態のナビゲーション装置2は、自車両の走行速度の測定データに基づいて、それぞれのリンクの減速走行距離および減速度を求めているので、ドライバの運転の癖などを織り込んだコスト変数値を記憶することができる。
【0063】
(第3の実施の形態)
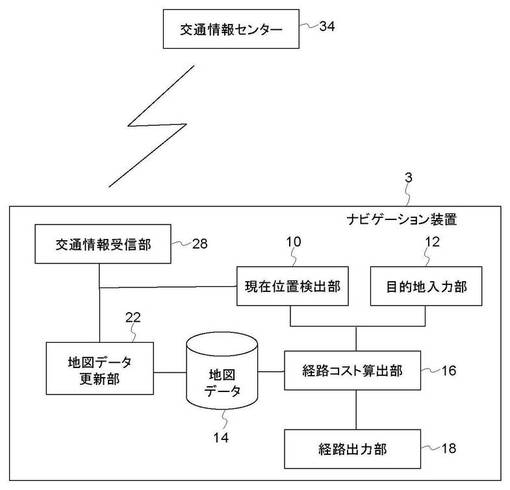
図9は、第3の実施の形態のナビゲーション装置3の構成を示す図である。第3の実施の形態のナビゲーション装置の基本的な構成は、第2の実施の形態のナビゲーション装置2と同じであるが、地図データ記憶部14に記憶するデータを交通情報センター34から受信している点が異なる。
【0064】
交通情報センター34は、多数の車両と通信可能に接続されており、多数の車両が実際に走行した位置と車速のデータを収集する。なお、このようにして収集される交通情報は、プローブ交通情報として知られている。交通情報センター34は、収集した位置および車速データに基づいて、第2の実施の形態と同様に、各リンクにおける減速走行距離および減速度を計算する。多数の車両の平均の減速走行距離および減速度を求め、各リンクの減速走行距離および減速度のコスト変数値を生成する。
【0065】
ナビゲーション装置3は、交通情報受信部28にて、交通情報センター34から各リンクにおける減速走行距離および減速度のデータを受信し、受信したデータを地図データ記憶部14に記憶する。これにより、第3の実施の形態のナビゲーション装置3は、自車両が走行したことのないリンクについての減速走行距離および減速度のデータを記憶することができ、これらのコスト変数値を用いて経路探索を行うことができる。
【0066】
なお、本実施の形態では、プローブ交通情報として、車両の位置および車速を収集し、各リンクの減速走行距離および減速度のデータを生成する例について説明したが、ハイブリッド車または電気自動車から電力回生量のデータを収集することができる場合には、電力回生量のデータを収集し、各リンクの走行により回生可能な電力回生量のデータを求めてもよい。
【0067】
以上、本発明の経路探索装置の構成および動作について、経路探索装置をナビゲーション装置に適用した実施の形態を挙げて詳細に説明したが、本発明は上記した実施の形態に限定されるものではない。
【0068】
上記した実施の形態では、ナビゲーション装置の構成および動作について説明したが、コンピュータにプログラムを実行させることにより上記したナビゲーション装置を実現する場合には、コンピュータを上記ナビゲーション装置として機能させるためのプログラムも本発明の範囲に含まれる。
【0069】
上記した実施の形態において、出発地から目的地までの経路コストに加えて蓄積可能な電力の空き容量をパラメータとして用いて、経路を探索することとしてもよい。すなわち、電力を蓄えておくことができる最大容量まで電力が回生された場合には、それ以上の電力回生ができないので、それより先の経路探索については、電力回生量のパラメータを無視して経路探索を行うこととしてもよい。この構成により、電力が十分に蓄えられている場合には、他の距離や費用などの他のパラメータに基づいて適切な経路を探索することが可能となる。なお、車両の走行によって電力を消費して、電力を蓄える余裕ができた場合には、その先の経路探索に電力回生量のパラメータを用いてもよい。
【0070】
上記した実施の形態では、車両の減速により電力を回生できる電力量をコスト変数値とする例について説明したが、各リンクにおける太陽発電量をコスト変数値として用いることも可能である。
【0071】
図10は、コスト変数値として各リンクにおける太陽熱発電量のデータを有する地図データ記憶部の例を示す図である。高層ビル、街路樹、トンネルなどの影響で各リンクに対する日差しのあたり具合が異なる場合に太陽発電量が異なるが、太陽発電量をコスト変数値とすることにより、効率良く充電を行える経路を探索できる。
【産業上の利用可能性】
【0072】
本発明は、電力を回生できる燃費の良い経路を探索することができ、ハイブリッド車や電気自動車で用いられるカーナビゲーション装置等として有用である。
【図面の簡単な説明】
【0073】
【図1】第1の実施の形態のナビゲーション装置の構成を示す図である。
【図2】(a)地図データ記憶部に記憶されているリンクの例を示す図である。(b)地図データ記憶部に記憶されているコスト変数値の例を示す図である。
【図3】(a)費用をリンクのコストに変換するテーブルの例を示す図である。(b)距離をリンクのコストに変換するテーブルの例を示す図である。(c)電力回生量をリンクのコストに変換するテーブルの例を示す図である。
【図4】ナビゲーション装置がコスト変数値を記憶する段階の動作を示す図である。
【図5】ナビゲーション装置が経路探索を行う段階の動作を示す図である。
【図6】第2の実施の形態のナビゲーション装置の構成を示す図である。
【図7】(a)地図データ記憶部に記憶されているリンクの例を示す図である。(b)地図データ記憶部に記憶されているコスト変数値の例を示す図である。
【図8】ナビゲーション装置がコスト変数値を記憶する段階の動作を示す図である。
【図9】第3の実施の形態のナビゲーション装置の構成を示す図である。
【図10】地図データ記憶部に記憶されているコスト変数値の例を示す図である。
【符号の説明】
【0074】
1〜3 ナビゲーション装置
10 現在位置検出部
12 目的地入力部
14 地図データ記憶部
16 経路コスト算出部
18 経路出力部
20 電力回生量データ受信部
22 地図データ更新部
24 速度データ受信部
26 渋滞判定部
28 交通情報受信部
30 電力回生量検出センサ
32 速度センサ
34 交通情報センター
【技術分野】
【0001】
本発明は、出発地から目的地までの経路を探索する経路探索装置に関する。
【背景技術】
【0002】
従来から、出発地から目的地までの最適経路を探索する経路探索装置として、様々な装置が提案されており、また製品化されている。特許文献1は、車種やドライバの運転の癖を反映し、燃料消費量が最小となる経路を探索する経路探索装置を開示している。この文献に記載された経路探索装置は、車種情報とドライバ毎の車両加速時の加速度合いに関する情報の少なくともどちらか1つを記憶しており、この情報を用いて、一般的な車両の燃費情報を補正する。そして、経路探索装置は、補正された燃費情報を用いて、車両が各リンクを走行した際の燃料消費量に相当するコストを計算し、出発地から目的地までの経路のうち、コストの加算値が最小となる経路を探索する。
【特許文献1】特開2006−300780号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記したように、従来の経路探索装置の中には、燃料消費を最小とすることに着目した装置も存在する。従来の自動車では、燃料消費を抑えることが燃費の向上につながっていた。
【0004】
最近では、ハイブリッド車や電気自動車が普及し始めている。ハイブリッド車や電気自動車では、走行中に電力を回生できるので、燃料消費を抑えることだけが燃費の向上につながるわけではない。
【0005】
そこで、本発明は、上記背景に鑑み、ハイブリッド車や電気自動車等のように電力を回生可能な車両にとって燃費の良い経路を探索できる経路探索装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の経路探索装置は、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部と、出発地と目的地を設定する地点設定部と、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算する経路コスト算出部と、前記経路コスト算出部における計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力する経路出力部とを備える。
【0007】
このように経路コストを計算するためのコスト変数として電力回生に関するコスト変数を導入することにより、走行中に電力を回生できる経路、すなわち、ハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【0008】
前記電力回生に関するコスト変数値としては、各リンクを走行したときの電力回生量を示すデータ、または、各リンクの走行により電力回生を行えるか否かを示すデータを用いることができる。
【0009】
本発明の経路探索装置は、車両の現在位置を検出する現在位置検出部と、電力回生量を検出するセンサから電力回生量を示すデータを受信する電力回生量データ受信部と、前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を前記電力回生量データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備える。
【0010】
この構成により、実際の車両の走行での電力回生量の測定データに基づいて、電力回生に関するコスト変数値を適切に求めることができる。
【0011】
本発明の経路探索装置は、各リンクにおける電力回生量のデータを含むプローブ交通情報を受信する交通情報受信部と、前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備えてもよい。
【0012】
この構成により、多数の車両から収集された電力回生量の測定データに基づいて、電力回生に関するコスト変数値を適切に決定することができる。
【0013】
本発明の経路探索装置において、前記電力回生に関するコスト変数値として、各リンクにおいて減速しながら走行した距離を示すデータを用いることができ、加えて、各リンクにおいて減速したときの負の加速度を示すデータを用いることができる。
【0014】
車両が電力を回生することができるのは車両が減速したときなので、減速しながら走行した距離は電力回生量と相関関係を有する。従って、減速しながら走行した距離を電力回生に関するコスト変数として用いることができる。また、車両が急激に減速する場合よりも緩やかに減速する場合の方が効率良く電力を回生できるので、減速時の負の加速度を示すデータをコスト変数として用いることにより、電力回生量を適切に予測することができる。
【0015】
本発明の経路探索装置は、車両の現在位置を検出する現在位置検出部と、車両の走行速度を検出するセンサから走行速度を示すデータを受信する速度データ受信部と、前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの前記電力回生に関するコスト変数値を前記速度データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備えてもよい。
【0016】
この構成により、実際の車両の走行における速度の測定データに基づいて、電力回生に関するコスト変数値を適切に決定することができる。
【0017】
本発明の経路探索装置は、渋滞しているか否かを判定する判定部を備え、前記地図データ更新部は、前記判定部にて渋滞していないと判定されたときに取得した速度データに基づいて前記コスト変数値を求めてもよい。
【0018】
渋滞しているときには、前方車両との車間距離を一定に保つために、こまめにブレーキをかける場合があるため、電力回生が可能かどうかを判断するための適切なデータを得ることが難しい。本発明によれば、渋滞していないときの速度データを用いて適切なコスト変数値を決定できる。
【0019】
本発明の経路探索装置は、各リンクにおける車両の速度データを含むプローブ交通情報を受信する交通情報受信部と、前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部とを備えてもよい。
【0020】
この構成により、多数の車両から収集された電力回生量の測定データに基づいて、電力回生に関するコスト変数値を適切に決定することができる。
【0021】
本発明の経路探索装置の前記地図データ記憶部には、各リンクにおける太陽発電量を示すデータを記憶してもよい。
【0022】
このように経路探索に用いるコスト変数として太陽発電量に関するコスト変数を導入することにより、発電量の大きい燃費の良い経路、すなわち燃費の良い経路を探索することができる。
【0023】
本発明の経路探索方法は、出発地から目的地までの経路を経路探索装置によって探索する方法であって、前記経路探索装置が、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部を準備するステップと、前記経路探索装置が、出発地と目的地を設定するステップと、前記経路探索装置が、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、前記経路探索装置が、前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップとを備える。
【0024】
本発明のコスト変数値の決定方法は、車両に搭載された経路探索装置によって、経路探索に用いるためのコスト変数値を決定する方法であって、経路探索装置が、車両の現在位置を検出するステップと、経路探索装置が、電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップとを備える。
【0025】
本発明のプログラムは、出発地から目的地までの経路を求めるために、コンピュータに、出発地と目的地を設定するステップと、道路を複数のリンクにより示した地図データとそれぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部から、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップとを実行させる。
【0026】
本発明のプログラムは、経路探索に用いるためのコスト変数値を決定するために、コンピュータに、車両の現在位置の検出するセンサから、車両の現在位置のデータを受信するステップと、電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップとを実行させる。
【発明の効果】
【0027】
本発明によれば、経路探索に用いるコスト変数として、電力回生に関するコスト変数を導入することにより、走行中に電力を回生できる経路、すなわちハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【発明を実施するための最良の形態】
【0028】
以下、本発明の実施の形態の経路探索装置について図面を参照しながら説明する。以下の説明では、経路探索装置をナビゲーション装置に適用した例について説明する。
(第1の実施の形態)
図1は、本発明の第1の実施の形態のナビゲーション装置1の構成を示す図である。本実施の形態のナビゲーション装置1は、ハイブリッド車両または電気自動車に搭載して用いられる。ナビゲーション装置1は、車両の現在位置を検出する現在位置検出部10と、目的地の入力を受け付ける目的地入力部12と、道路地図等のデータを記憶した地図データ記憶部14と、現在位置から目的地までの経路の経路コストを計算する経路コスト算出部16と、経路コスト算出部16にて計算された経路コストが最小となる経路を出力する経路出力部18とを有している。
【0029】
本実施の形態では、出発地として、現在位置検出部10にて検出した車両の現在位置のデータを用い、現在位置から目的地までの経路を探索する例を説明する。現在位置検出部10および目的地入力部12は、請求項に記載の「地点設定部」に該当する。なお、本発明は、必ずしも現在位置を出発地として用いる必要はなく、ドライバが手動で出発地を入力することとしてもよい。
【0030】
現在位置検出部10は、例えば、車両の絶対方位を検出するための地磁気センサ、車両の相対方位を検出するためのジャイロスコープ、車両の走行距離を検出する距離センサ、および衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機を有している。これらのセンサ等はそれぞれが性質の異なる誤差を持っているため、複数のセンサ等により各々を補完しながら使用するように構成されている。なお、精度によっては、上述したうちの一部のセンサで現在位置検出部10を構成してもよいし、更に、図示しないステアリングの回転センサ、各転動輪の車速センサ等を用いてもよい。
【0031】
目的地入力部12は、ドライバから電話番号や住所等の入力を受け付けることによって目的地の設定を受け付ける。
【0032】
地図データ記憶部14は、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応する複数種類のコスト変数値を記憶している。
【0033】
図2(a)および図2(b)は、地図データ記憶部14に記憶されているコスト変数値の例を示す図である。図2(a)に示すように、地図データ記憶部14は、道路をノードA〜ノードE、リンクL001、L002等で表現したデータを記憶している。
【0034】
図2(b)に示すように、地図データ記憶部14は、道路属性として費用、距離のデータを記憶すると共に、そのリンクを走行したときに回生できる回生電力量を記憶している。費用、距離および回生電力量がコスト変数に相当し、記憶されたそれぞれのデータがコスト変数値に相当する。
【0035】
経路コスト算出部16が、経路コストを求める際には、表現形式の異なる費用、距離、電力回生量の各コスト変数値を統一的に扱える表現形式(ここでは単に「コスト」という)に変換する。
【0036】
図3(a)〜(c)は、費用、距離、電力回生量のそれぞれをコストに変換するテーブルの例を示す図である。費用、距離は大きくなれば、そのリンクは選択されにくくなるので、テーブルは、図3(a)、図3(b)に示すように費用、距離が増大するに従ってコストが大きくなるように設定されている。回生電力量については、回生電力量が大きくなれば、そのリンクは選択されやすくなるので、テーブルは、図3(c)に示すように、回生電力量が大きくなるに従ってコストが小さくなるように設定されている。
【0037】
経路コスト算出部16は、複数種類のそれぞれのコスト変数値を変換したコストを合計してリンクコストを求め、候補経路を構成する全リンクのリンクコストを合計して経路全体の経路コストを計算する。
【0038】
なお、経路コスト算出部16は、リンクコストを求める際に、コスト変数の種類に応じて重み係数を乗じてもよい。重み係数の値は、ドライバがどのような観点で経路探索を行うかに応じて変更してもよい。例えば、ドライバが距離を優先して経路探索を行う場合には、距離のコスト変数値に乗じる重み係数を大きくし、ドライバが一般道(有料ではない)を優先して経路探索を行う場合には、費用のコスト変数値に乗じる重み係数を大きくする等のように重み係数の値を変更してもよい。
【0039】
次に、各リンクを走行したときに回生される回生電力量のデータを地図データ記憶部14に記憶させるための構成について説明する。ハイブリッド車、電気自動車には、電力回生量を検出する電力回生量検出センサ30が設けられている。ナビゲーション装置1は、電力回生量検出センサ30から送信される電力回生量のデータを受信する電力回生量データ受信部20と、電力回生量データ受信部20にて受信したデータとに基づいて地図データ記憶部14を更新する地図データ更新部22とを有している。
【0040】
地図データ更新部22は、電力回生量データ受信部20にて、電力回生量のデータを受信すると、現在位置検出部10にて検出した車両の現在位置と地図データ記憶部14に記憶された地図データとに基づいて、現在走行中のリンクを特定する。地図データ更新部22は、特定されたリンクに関連付けて記憶されている電力回生量と、電力回生量データ受信部20にて受信したデータとに基づいて当該リンクの電力回生量のコスト変数値を求め、当該コスト変数値によって地図データ記憶部14を更新する。地図データ更新部22は、更新前に記憶されていた電力回生量と受信した電力回生量との平均を求めて新たな電力回生量のコスト変数値としてもよいし、受信した電力回生量をそのまま新たなコスト変数値としてもよい。
【0041】
次に、第1の実施の形態のナビゲーション装置1の動作について説明する。ナビゲーション装置1の動作は、地図データ記憶部14に電力回生量を示すコスト変数値を記憶する段階と、地図データ記憶部14に記憶されたコスト変数値を用いて経路を探索する段階に分けることができる。
【0042】
図4は、ナビゲーション装置1がコスト変数値を記憶する段階の動作を示す図である。ナビゲーション装置1は、電力回生量検出センサ30から送信される電力回生量のデータを受信したか否かを判定する(S10)。電力回生量データを受信していない場合には(S10でNO)、電力回生量データを受信するまで判定(S10)の処理を繰り返し行う。
【0043】
電力回生量データを受信した場合には(S10でYES)、ナビゲーション装置1は、車両の現在位置を検出し(S12)、検出された現在位置と地図データ記憶部14に記憶されたデータとに基づいて、現在走行中のリンクを特定する(S14)。
【0044】
続いて、ナビゲーション装置1は、受信した電力回生量データと地図データ記憶部14に記憶されている電力回生量データとに基づいて、地図データ記憶部14に記憶する新たな電力回生量のコスト変数値を求め(S16)、当該コスト変数値によって地図データ記憶部14を更新する(S18)。ナビゲーション装置1は、以上の動作により、自車両によって電力を回生した電力回生量の測定データに基づき、地図データ記憶部14に電力回生量のコスト変数値を新規に記憶または更新することができる。
【0045】
図5は、ナビゲーション装置1が経路探索を行う段階の動作を示す図である。ナビゲーション装置1は、ドライバから入力される目的地の設定を受け付ける(S20)。次に、ナビゲーション装置1は、現在位置検出部10により車両の現在位置を検出し(S22)、検出した現在位置を出発地として現在位置から目的地までの経路探索を行う。
【0046】
ナビゲーション装置1は、現在位置から目的地までの複数の候補経路を検出する(S24)。次に、ナビゲーション装置1は、地図データ記憶部14に記憶されたコスト変数値を用いて、各候補経路の経路コストを計算し(S26)、計算結果に基づいて経路コストが最小となる候補経路を案内経路として出力する(S28)。以上、第1の実施の形態のナビゲーション装置1について説明した。
【0047】
第1の実施の形態のナビゲーション装置1は、それぞれのリンクを走行するときに回生される回生電力量をコスト変数として経路探索を行うので、電力の回生量の多い経路、すなわち、ハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【0048】
また、第1の実施の形態のナビゲーション装置1は、自車両の走行中に電力を回生した電力回生量の測定データに基づいて、それぞれのリンクの回生電力量を求めているので、車種の違いやドライバの運転の癖などを織り込んだ電力回生量をコスト変数値として記憶することができる。
【0049】
なお、本実施の形態では、地図データ記憶部14は、リンクを走行したときに回生できる回生電力量のデータをコスト変数値として記憶する例について説明したが、地図データ記憶部14は、電力回生を行えたか否かを示すデータをコスト変数値としてもよい。電力回生を行えたか否かを示すデータによっても、電力回生を行えるリンクを多く含む経路を探索することにより、燃費の良い経路を案内することができる。
【0050】
(第2の実施の形態)
図6は、本発明の第2の実施の形態のナビゲーション装置2の構成を示す図である。第2の実施の形態のナビゲーション装置2の基本的な構成は第1の実施の形態のナビゲーション装置1と同じであるが、地図データ記憶部14に記憶された電力回生に関するコスト変数の内容が異なる。
【0051】
図7(a)および図7(b)は、地図データ記憶部14に記憶されているコスト変数値の例を示す図である。図7(a)は、図2(a)と同様に、道路のノードおよびリンクを示す。第2の実施の形態において、地図データ記憶部14は、図7(b)に示すように、電力回生に関するコスト変数として、減速走行距離と減速度を記憶している。減速走行距離は、車両が減速しながら走行した距離を示すデータであり、減速度は電力を回生する際の車両の負の加速度を示すデータである。
【0052】
第2の実施の形態のナビゲーション装置2は、減速走行距離および加速度のデータを取得する構成として、車両の走行速度を検出する速度センサから送信されるデータを受信する速度データ受信部24を有している。地図データ更新部22は、速度データ受信部24にて受信した車両の走行速度と現在位置検出部10にて検出された現在位置のデータとに基づいて、減速走行した距離と、そのときの減速度を計算により求める。また、第1の実施の形態の場合と同様に、現在位置検出部10にて検出した現在位置のデータに基づいて、車両が現在走行中のリンクを特定する。
【0053】
地図データ更新部22は、特定されたリンクに関連付けられて記憶されている減速走行距離および減速度と、受信したデータから求めた減速走行距離および減速度とに基づいて、当該リンクの減速走行距離および減速度のコスト変数値を求め、当該コスト変数値によって地図データ記憶部14を更新する。
【0054】
また、地図データ更新部22は、渋滞判定部26を有している。渋滞判定部26は、速度データ受信部24にて受信した速度データの推移から道路が渋滞しているか否かを判定する。具体的には、渋滞判定部26は、速度データが所定の範囲(例えば40km/h〜60km/h)で安定している場合には、渋滞していないと判定し、速度データが頻繁に0近くの値に落ち込む場合には、渋滞していると判定することができる。なお、本実施の形態では、渋滞判定部26は速度データの推移に基づいて渋滞判定を行っているが、例えば、VICSやプローブ等の交通情報に基づいて渋滞を判定することとしてもよい。
【0055】
地図データ更新部22は、渋滞判定部26にて渋滞しているか否かを判定した結果に基づいて、渋滞していないと判定されたときの速度データに基づいて減速走行距離および減速度を求め、渋滞していると判定されたときの速度データを使わない。
【0056】
次に、第2の実施の形態のナビゲーション装置2の動作について説明する。第2の実施の形態のナビゲーション装置2によって経路探索を行う動作は、経路コストの計算に用いるコスト変数値が異なるだけで、第1の実施の形態のナビゲーション装置1の動作と同じである。
【0057】
図8は、第2の実施の形態のナビゲーション装置2がコスト変数値を記憶する段階の動作を示す図である。ナビゲーション装置2は、車両の走行速度を検出する速度センサから速度データを受信すると(S30)、減速したか否かを判定する(S32)。車両が減速していないと判定された場合には(S32でNO)、ナビゲーション装置2は速度データを受信する処理に戻る(S30)。
【0058】
車両が減速したと判定された場合には(S32でYES)、ナビゲーション装置2は、渋滞判定部26にて渋滞しているか否かを判定する(S34)。渋滞していると判定された場合には(S34でYES)、ナビゲーション装置2は速度データを受信する処理に戻る(S34)。
【0059】
渋滞していないと判定された場合(S34でNO)、ナビゲーション装置2は、車両の現在位置を検出する(S36)。続いて、ナビゲーション装置2は、車両の現在位置のデータを用いて、減速が始まった地点から減速し終えた地点までの距離と、減速度(負の加速度)を算出する(S38)。次に、ナビゲーション装置2は、現在位置のデータと地図データ記憶部14に記憶されたデータとに基づいて、現在走行中のリンクを特定する(S40)。
【0060】
ナビゲーション装置2は、受信した速度データから求めた減速走行距離および減速度と地図データ記憶部14に記憶されている減速走行距離および減速度とに基づいて、地図データ記憶部14に記憶する新たな減速走行距離および減速度のコスト変数値を求め(S42)、当該コスト変数値によって地図データ記憶部14を更新する(S44)。ナビゲーション装置2は、以上の動作により、自車両の走行状況に基づき、地図データ記憶部14に減速走行距離および減速度のコスト変数値を新規に記憶または更新する。以上、第2の実施の形態のナビゲーション装置2の構成および動作について説明した。
【0061】
第2の実施の形態において地図データ記憶部14に記憶している減速走行距離および減速度のデータは、そのリンクにおいて回生可能な電力量と相関関係を有している。従って、減速走行距離および減速度をコスト変数として、経路探索を行うことにより、電力の回生量の多い経路、すなわち、ハイブリッド車や電気自動車にとって燃費の良い経路を探索することができる。
【0062】
また、第2の実施の形態のナビゲーション装置2は、自車両の走行速度の測定データに基づいて、それぞれのリンクの減速走行距離および減速度を求めているので、ドライバの運転の癖などを織り込んだコスト変数値を記憶することができる。
【0063】
(第3の実施の形態)
図9は、第3の実施の形態のナビゲーション装置3の構成を示す図である。第3の実施の形態のナビゲーション装置の基本的な構成は、第2の実施の形態のナビゲーション装置2と同じであるが、地図データ記憶部14に記憶するデータを交通情報センター34から受信している点が異なる。
【0064】
交通情報センター34は、多数の車両と通信可能に接続されており、多数の車両が実際に走行した位置と車速のデータを収集する。なお、このようにして収集される交通情報は、プローブ交通情報として知られている。交通情報センター34は、収集した位置および車速データに基づいて、第2の実施の形態と同様に、各リンクにおける減速走行距離および減速度を計算する。多数の車両の平均の減速走行距離および減速度を求め、各リンクの減速走行距離および減速度のコスト変数値を生成する。
【0065】
ナビゲーション装置3は、交通情報受信部28にて、交通情報センター34から各リンクにおける減速走行距離および減速度のデータを受信し、受信したデータを地図データ記憶部14に記憶する。これにより、第3の実施の形態のナビゲーション装置3は、自車両が走行したことのないリンクについての減速走行距離および減速度のデータを記憶することができ、これらのコスト変数値を用いて経路探索を行うことができる。
【0066】
なお、本実施の形態では、プローブ交通情報として、車両の位置および車速を収集し、各リンクの減速走行距離および減速度のデータを生成する例について説明したが、ハイブリッド車または電気自動車から電力回生量のデータを収集することができる場合には、電力回生量のデータを収集し、各リンクの走行により回生可能な電力回生量のデータを求めてもよい。
【0067】
以上、本発明の経路探索装置の構成および動作について、経路探索装置をナビゲーション装置に適用した実施の形態を挙げて詳細に説明したが、本発明は上記した実施の形態に限定されるものではない。
【0068】
上記した実施の形態では、ナビゲーション装置の構成および動作について説明したが、コンピュータにプログラムを実行させることにより上記したナビゲーション装置を実現する場合には、コンピュータを上記ナビゲーション装置として機能させるためのプログラムも本発明の範囲に含まれる。
【0069】
上記した実施の形態において、出発地から目的地までの経路コストに加えて蓄積可能な電力の空き容量をパラメータとして用いて、経路を探索することとしてもよい。すなわち、電力を蓄えておくことができる最大容量まで電力が回生された場合には、それ以上の電力回生ができないので、それより先の経路探索については、電力回生量のパラメータを無視して経路探索を行うこととしてもよい。この構成により、電力が十分に蓄えられている場合には、他の距離や費用などの他のパラメータに基づいて適切な経路を探索することが可能となる。なお、車両の走行によって電力を消費して、電力を蓄える余裕ができた場合には、その先の経路探索に電力回生量のパラメータを用いてもよい。
【0070】
上記した実施の形態では、車両の減速により電力を回生できる電力量をコスト変数値とする例について説明したが、各リンクにおける太陽発電量をコスト変数値として用いることも可能である。
【0071】
図10は、コスト変数値として各リンクにおける太陽熱発電量のデータを有する地図データ記憶部の例を示す図である。高層ビル、街路樹、トンネルなどの影響で各リンクに対する日差しのあたり具合が異なる場合に太陽発電量が異なるが、太陽発電量をコスト変数値とすることにより、効率良く充電を行える経路を探索できる。
【産業上の利用可能性】
【0072】
本発明は、電力を回生できる燃費の良い経路を探索することができ、ハイブリッド車や電気自動車で用いられるカーナビゲーション装置等として有用である。
【図面の簡単な説明】
【0073】
【図1】第1の実施の形態のナビゲーション装置の構成を示す図である。
【図2】(a)地図データ記憶部に記憶されているリンクの例を示す図である。(b)地図データ記憶部に記憶されているコスト変数値の例を示す図である。
【図3】(a)費用をリンクのコストに変換するテーブルの例を示す図である。(b)距離をリンクのコストに変換するテーブルの例を示す図である。(c)電力回生量をリンクのコストに変換するテーブルの例を示す図である。
【図4】ナビゲーション装置がコスト変数値を記憶する段階の動作を示す図である。
【図5】ナビゲーション装置が経路探索を行う段階の動作を示す図である。
【図6】第2の実施の形態のナビゲーション装置の構成を示す図である。
【図7】(a)地図データ記憶部に記憶されているリンクの例を示す図である。(b)地図データ記憶部に記憶されているコスト変数値の例を示す図である。
【図8】ナビゲーション装置がコスト変数値を記憶する段階の動作を示す図である。
【図9】第3の実施の形態のナビゲーション装置の構成を示す図である。
【図10】地図データ記憶部に記憶されているコスト変数値の例を示す図である。
【符号の説明】
【0074】
1〜3 ナビゲーション装置
10 現在位置検出部
12 目的地入力部
14 地図データ記憶部
16 経路コスト算出部
18 経路出力部
20 電力回生量データ受信部
22 地図データ更新部
24 速度データ受信部
26 渋滞判定部
28 交通情報受信部
30 電力回生量検出センサ
32 速度センサ
34 交通情報センター
【特許請求の範囲】
【請求項1】
道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部と、
出発地と目的地を設定する地点設定部と、
出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算する経路コスト算出部と、
前記経路コスト算出部における計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力する経路出力部と、
を備える経路探索装置。
【請求項2】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクを走行したときの電力回生量を示すデータを記憶している請求項1に記載の経路探索装置。
【請求項3】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクの走行により電力回生を行えるか否かを示すデータを記憶している請求項1に記載の経路探索装置。
【請求項4】
車両の現在位置を検出する現在位置検出部と、
電力回生量を検出するセンサから電力回生量を示すデータを受信する電力回生量データ受信部と、
前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を前記電力回生量データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項2または3に記載の経路探索装置。
【請求項5】
各リンクにおける電力回生量のデータを含むプローブ交通情報を受信する交通情報受信部と、
前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項2または3に記載の経路探索装置。
【請求項6】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクにおいて減速しながら走行した距離を示すデータを記憶している請求項1に記載の経路探索装置。
【請求項7】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクにおいて減速したときの負の加速度を示すデータを記憶している請求項6に記載の経路探索装置。
【請求項8】
車両の現在位置を検出する現在位置検出部と、
車両の走行速度を検出するセンサから走行速度を示すデータを受信する速度データ受信部と、
前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの前記電力回生に関するコスト変数値を前記速度データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項6または7に記載の経路探索装置。
【請求項9】
渋滞しているか否かを判定する判定部を備え、
前記地図データ更新部は、前記判定部にて渋滞していないと判定されたときに取得した速度データに基づいて前記コスト変数値を求める請求項8に記載の経路探索装置。
【請求項10】
各リンクにおける車両の速度データを含むプローブ交通情報を受信する交通情報受信部と、
前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項6または7に記載の経路探索装置。
【請求項11】
前記地図データ記憶部には、各リンクにおける太陽発電量を示すデータを記憶している請求項1に記載の経路探索装置。
【請求項12】
出発地から目的地までの経路を経路探索装置によって探索する方法であって、
前記経路探索装置が、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部を準備するステップと、
前記経路探索装置が、出発地と目的地を設定するステップと、
前記経路探索装置が、出発地から目的地までの複数の候補経路を構成するリンクに対応付するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、
前記経路探索装置が、前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップと、
を備える経路探索方法。
【請求項13】
車両に搭載された経路探索装置によって、経路探索に用いるためのコスト変数値を決定する方法であって、
経路探索装置が、車両の現在位置を検出するステップと、
経路探索装置が、電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、
前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップと、
を備えるコスト変数値決定方法。
【請求項14】
出発地から目的地までの経路を求めるために、コンピュータに、
出発地と目的地を設定するステップと、
道路を複数のリンクにより示した地図データとそれぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部から、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、
前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップと、
を実行させるプログラム。
【請求項15】
経路探索に用いるためのコスト変数値を決定するために、コンピュータに、
車両の現在位置の検出するセンサから、車両の現在位置のデータを受信するステップと、
電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、
前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップと、
を実行させるプログラム。
【請求項1】
道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部と、
出発地と目的地を設定する地点設定部と、
出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算する経路コスト算出部と、
前記経路コスト算出部における計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力する経路出力部と、
を備える経路探索装置。
【請求項2】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクを走行したときの電力回生量を示すデータを記憶している請求項1に記載の経路探索装置。
【請求項3】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクの走行により電力回生を行えるか否かを示すデータを記憶している請求項1に記載の経路探索装置。
【請求項4】
車両の現在位置を検出する現在位置検出部と、
電力回生量を検出するセンサから電力回生量を示すデータを受信する電力回生量データ受信部と、
前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を前記電力回生量データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項2または3に記載の経路探索装置。
【請求項5】
各リンクにおける電力回生量のデータを含むプローブ交通情報を受信する交通情報受信部と、
前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項2または3に記載の経路探索装置。
【請求項6】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクにおいて減速しながら走行した距離を示すデータを記憶している請求項1に記載の経路探索装置。
【請求項7】
前記地図データ記憶部には、前記電力回生に関するコスト変数値として、各リンクにおいて減速したときの負の加速度を示すデータを記憶している請求項6に記載の経路探索装置。
【請求項8】
車両の現在位置を検出する現在位置検出部と、
車両の走行速度を検出するセンサから走行速度を示すデータを受信する速度データ受信部と、
前記現在位置検出部にて検出した現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの前記電力回生に関するコスト変数値を前記速度データ受信部にて受信したデータに基づいて求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項6または7に記載の経路探索装置。
【請求項9】
渋滞しているか否かを判定する判定部を備え、
前記地図データ更新部は、前記判定部にて渋滞していないと判定されたときに取得した速度データに基づいて前記コスト変数値を求める請求項8に記載の経路探索装置。
【請求項10】
各リンクにおける車両の速度データを含むプローブ交通情報を受信する交通情報受信部と、
前記交通情報受信部にて受信したプローブ交通情報に基づいて、前記各リンクの電力回生量に関するコスト変数値を求め、求めたコスト変数値を前記地図データ記憶部に記憶する地図データ更新部と、
を備える請求項6または7に記載の経路探索装置。
【請求項11】
前記地図データ記憶部には、各リンクにおける太陽発電量を示すデータを記憶している請求項1に記載の経路探索装置。
【請求項12】
出発地から目的地までの経路を経路探索装置によって探索する方法であって、
前記経路探索装置が、道路を複数のリンクにより示した地図データと、それぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部を準備するステップと、
前記経路探索装置が、出発地と目的地を設定するステップと、
前記経路探索装置が、出発地から目的地までの複数の候補経路を構成するリンクに対応付するコスト変数値を前記地図データ記憶部から読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、
前記経路探索装置が、前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップと、
を備える経路探索方法。
【請求項13】
車両に搭載された経路探索装置によって、経路探索に用いるためのコスト変数値を決定する方法であって、
経路探索装置が、車両の現在位置を検出するステップと、
経路探索装置が、電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、
前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップと、
を備えるコスト変数値決定方法。
【請求項14】
出発地から目的地までの経路を求めるために、コンピュータに、
出発地と目的地を設定するステップと、
道路を複数のリンクにより示した地図データとそれぞれのリンクに対応付けて電力回生に関するコスト変数値を含む複数種類のコスト変数値を記憶した地図データ記憶部から、出発地から目的地までの複数の候補経路を構成するリンクに対応するコスト変数値を読み出し、読み出したコスト変数値に基づいてそれぞれの候補経路の経路コストを計算するステップと、
前記計算結果に基づき、前記候補経路の中で経路コストが最小となる経路を出力するステップと、
を実行させるプログラム。
【請求項15】
経路探索に用いるためのコスト変数値を決定するために、コンピュータに、
車両の現在位置の検出するセンサから、車両の現在位置のデータを受信するステップと、
電力回生量を検出するセンサまたは車両の走行速度を検出するセンサから電力回生量を示すデータまたは車両速度を示すデータを受信するステップと、
前記現在位置のデータから現在走行中のリンクを特定し、特定されたリンクの電力回生量に関するコスト変数値を、前記電力回生量を示すデータまたは前記車両速度を示すデータに基づいて求めるステップと、
を実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−101745(P2010−101745A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−273207(P2008−273207)
【出願日】平成20年10月23日(2008.10.23)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月23日(2008.10.23)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(502324066)株式会社デンソーアイティーラボラトリ (332)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]