
経路探索装置、経路探索方法、及び経路探索処理プログラム等
【課題】より最適な経路を精度良く探索することが可能な経路探索装置、経路探索方法、及び経路探索処理プログラム等を提供する。
【解決手段】本願の経路探索装置は、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行い、判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得し、リンクコスト及び前記取得されたノードコストに基づいて最適経路を探索する。
【解決手段】本願の経路探索装置は、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行い、判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得し、リンクコスト及び前記取得されたノードコストに基づいて最適経路を探索する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索装置及び方法等の技術分野に関する。
【背景技術】
【0002】
この種の経路探索装置等においては、例えば出発地或いは現在地から、目的地に至る複数の経路候補毎に、各リンクに設定されたリンクコスト(例えば、当該リンクに対応する道路等の区間における距離、道幅等の道路属性が考慮された重みづけ)を積算して総リンクコストを求め、総リンクコストが最小の経路候補を最適経路として探索することが知られている。
【0003】
ところで、特許文献1に開示されたナビゲーション装置においては、リンクコストばかりでなく、複数のリンクを接続するノードにおけるノードコストをも考慮して総コスト(総リンクコストと総ノードコストとの和)を求めるようになっており、当該ノードコストは、右左折を用いて決定することができ、右折の場合、曲がり難いため増大されるようになっている。
【0004】
また、特許文献2に開示されたナビゲーション装置においては、道路の走行頻度(走行回数)を考慮して、当該道路に対応するリンクのリンクコストを変化させる(いわゆる、学習機能)ようになっている。
【0005】
このような特許文献1又は特許文献2に開示されたナビゲーション装置によれば、運転者の要望に近い経路を探索することが可能となる。
【特許文献1】特開2000−329574号公報
【特許文献2】特開2003−57054号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、例えば、ノードに対応する交差点を介してあるリンクに対応する道路から別のリンクに対応する道路へ車両が移動(直進、右左折等による)する場合、当該移動の困難さは、右折の場合ばかりでなく、道路の幅、信号の有無、右左折レーンの有無、道路の形状(T字路、又は十字路等)、又は道路の交通状況(渋滞等)等の要素によっても、異なるものである。特許文献1に示されるような従来のナビゲーション装置においては、このような要素が全く考慮されていなかったため、より最適な経路を探索する上で限界があるという不都合がある。
【0007】
また、例えば、特許文献1に示されるような従来のナビゲーション装置におけるリンクコストを、特許文献2に示されるように走行頻度に応じて変化させた場合、当該リンクコストと、走行頻度に応じて変化しないノードコストとの関係において問題が生じる可能性がある。
【0008】
例えば、同一の出発地及び目的地を有し互いに異なる2つの経路であって、一方を経路(以下、「経路A」という)の総コストが“1400”(総リンクコストが“1000”、総ノードコストが“400”)であり、他方の経路(以下、「経路B」という)の総コストが“1600”(総リンクコストが“1500”、総ノードコストが“100”)であると仮定した(つまり、経路Aの方が、経路Bよりも右折又は左折の数は多いが距離は短いので、最適経路となる)場合に、車両が経路Aと経路Bとを同一の頻度で走行(均等に学習)すると、リンクコストは走行頻度に応じて減少するので、経路Aと経路Bとの距離差による違いは、相対的に学習を行う前よりも小さくなる。ところが、ノードコストは、学習前後で変わらないので、経路Aの総コスト(例えば、“900”(総リンクコストが“500”、総ノードコストが“400”))と、経路Bの総コスト(例えば、“850”(総リンクコストが“750”、総ノードコストが“100”))が、学習前と比べて逆転してしまい、最適経路となるべき経路Aでなく、経路Bが最適経路として選ばれてしまうという不都合がある。
【0009】
そこで、このような不都合の解消を一つの課題とし、より最適な経路を精度良く探索することが可能な経路探索装置、経路探索方法、及び経路探索処理プログラム等を提供することを目的する。
【課題を解決するための手段】
【0010】
上記課題を解決するため、請求項1に記載の発明は、第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索装置において、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段と、前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段と、前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段と、を備えることを特徴とする。
【0011】
請求項4に記載の発明は、第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索方法において、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う工程と、前記判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する工程と、前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する工程と、 を備えることを特徴とする。
【0012】
請求項5に記載の経路探索処理プログラムの発明は、第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索するコンピュータを、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段、前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段、及び前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段として機能させることを特徴とする。
【発明を実施するための最良の形態】
【0013】
以下、本願の最良の実施形態を添付図面に基づいて説明する。なお、以下に説明する実施の形態は、車載用ナビゲーション装置に対して本願を適用した場合の実施形態である。また、この車載用ナビゲーション装置は、移動体の一例としての車両に搭載され、当該車両に搭載されたバッテリから電力が供給されて動作するようになっている。
【0014】
先ず、図1等を参照して、本実施形態における車載用ナビゲーション装置の構成及び機能を説明する。
【0015】
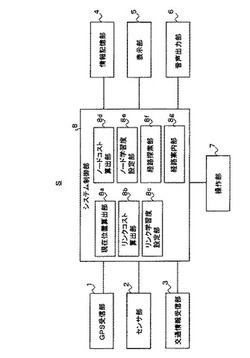
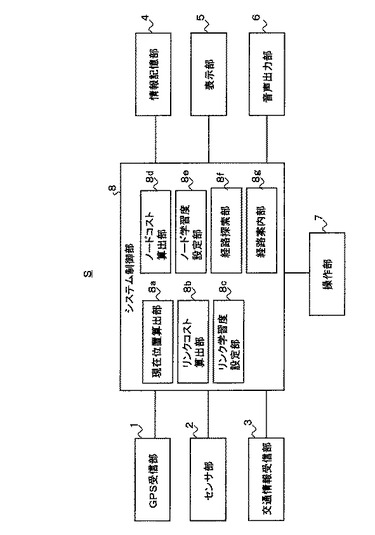
図1は、本実施形態に係る車載用ナビゲーション装置の概要構成例を示す図である。
【0016】
図1に示すように、車載用ナビゲーション装置Sは、GPS(Global Positioning System)受信部1、センサ部2、交通情報受信部3、情報記憶部4、表示部5、音声出力部6、操作部7、及びシステム制御部8等を備えて構成されている。
【0017】
GPS受信部1は、衛星軌道上に配置され地球を周回するGPS衛星から出力される航法電波を、図示しないアンテナを介して受信し、受信した信号に基づいて現在位置情報(経度及び緯度)を検出し、GPSデータとしてシステム制御部8へ出力するようになっている。
【0018】
センサ部2は、例えば、車速パルスに基づき車両の速度を検出する速度センサ、地磁気を利用して車両の走行方位を検出する方位センサ(ジャイロセンサ)、車両の加速度を検出する加速度センサ、車両の走行距離を検出する距離センサ等を備えており、これらのセンサによって検出された各データ(速度データ、方位データ、加速度データ、走行距離データ等)を、システム制御部8へ出力するようになっている。
【0019】
交通情報受信部3は、例えばVICS(Vehicle Information and Communication System)受信機を有しており、FM多重放送、道路(主要幹線道路や高速道路)上に設置された光(赤外線)ビーコン、電波(準マイクロ波)ビーコン等から発信された道路交通情報(例えば、渋滞等の交通状況に関する情報)を受信し、システム制御部8へ出力するようになっている。
【0020】
情報記憶部4は、例えば、CD(Compact Disc)−ROMドライブ、DVD(Digital Versatile Disc)−ROMドライブ、又はHD(Hard Disc)ドライブ等を備えており、各ドライブが、システム制御部8の制御の下、CD−ROM、DVD−ROM、又はHD等の記録媒体に記録された経路探索や経路案内(経路誘導)等を行うためのデータ及びプログラムを読み出し、システム制御部8へ出力するようになっている。
【0021】
ここで、経路探索や経路案内等を行うためのデータには、例えば、地図データ、リンクデータ、ノードデータ、及び経路案内データ、更には、ユーザに対し入力指示や選択指示を促すためのデータ(例えば、メニューデータ)等が含まれている。
【0022】
地図データは、例えばそれぞれ固有の識別番号が付加された複数の領域(メッシュ)データを有している。各領域データは、当該領域の画像、及び当該領域の一辺の長さ(つまり、実際の地形上の長さを地図の縮尺に応じて短縮した長さ)等のデータを有している。そして、地図データは、これらの領域データが縦横に複数連続して構成される。また、各領域データには、道路、交差点、屈曲点、分岐点、合流点、信号機、標識(例えば、一方通行)、有料道路の料金所、有料道路のインターチェンジ、著名な場所、及び建造物等を示す名称(マーク),位置情報(経度及び緯度や、地図データにおける座標(X,Y))等の情報が含まれる。
【0023】
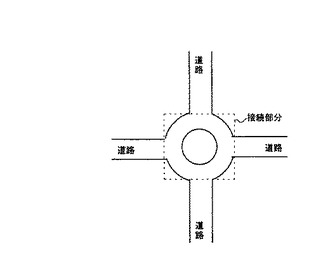
そして、地図データにおける道路は、複数の線分としてのリンクから構成され、少なくとも2つのリンクは、1つのノードで接続される。このノードは、例えば、各道路の交差点、屈曲点、分岐点、合流点(ジャンクション)、又は有料道路のインターチェン等の接点(結節点)を含む接続部分に対応する。また、当該接続部分には、交差点等ばかりでなく、欧州などでよく見られるランナバウトと呼ばれる図2に示すような道路の接続部分(破線内)を含んでもよい。
【0024】
また、各リンクには、固有の識別番号(以下、「リンクID」という)が付与され、各ノードには、固有の識別番号(以下、「ノードID」という)が付与される。
【0025】
リンクデータは、上記各リンク毎に、リンクのリンクID、当該リンクが接続される2つのノードのノードID、当該リンクに対応する道路の距離(道路区間の距離)、属性、及び方位等の情報を有している(これらの情報は、各リンク毎に対応付けられている)。なお、道路の属性には、例えば、道路の幅員、道路の車線数、一方通行と双方通行の別、右左折レーンの有無等の情報が該当する。
【0026】
更に、各リンクには、そのリンクに対応する道路の距離や道路の属性等が考慮された重みづけとしてのリンクコストが設定される。例えば、道路の距離が短い場合や、道路の幅員が広い場合には、当該区間の走行に要する時間は短くなるので、リンクコストが小さく設定される。
【0027】
ノードデータは、上記各ノード毎に、ノードのノードID、当該ノードの位置情報(経度及び緯度や、地図データにおける座標(X,Y))、当該ノードに接続されるリンクのリンクID等の情報を有している。
【0028】
更に、各ノードには、1のリンクに対応する道路からそのノードに対応する接続部分を介して他のリンクに対応する道路への車両の移動(直進、右左折等)の困難さをあらわす重みづけとしてのノードコストが設定される。
【0029】
当該接続部分を介した車両の移動の困難さは、(i)当該移動の方向(例えば、直進方向、右折方向、左折方向等)、(ii)その接続部分を介した移動を規制する規制要素(例えば、信号、標識(例えば、一時停止)、有料道路の料金所、交通規制人、建物等の障害物)の有無、(iii)その接続部分への道路の接続数(例えば、三叉、四叉、五叉等)、(iv)その接続部分の道路の接続形状(例えば、T字路、十字路等)、(v)その接続部分に接続される道路のうち少なくとも何れか一つの道路の属性(例えば、交差点を右左折する前の走行道路の幅員又は車線数、交差点を右左折した後の走行道路の幅員又は車線数、交差点を右左折する前に対向する(前方の)道路(走行道路でない道路)の幅員又は車線数、交差点を直進する前の走行道路の幅員又は車線数、交差点を直進した後の走行道路の幅員又は車線数、交差点を直進する際に横断する道路(走行道路でない道路)の幅員又は車線数、更には、交差点を右左折する前の走行道路の右左折レーンの有無、交差点を移動する前又は後の走行道路の一方通行又は双方通行の別等)、(vi)その接続部分に接続される道路のうち少なくとも何れか一つの道路の状況(例えば、交差点を右左折する前の走行道路の交通状況(例えば、渋滞の有無)、交差点を右左折した後の走行道路の交通状況、交差点を右左折する前に対向する道路の交通状況、交差点を直進する前の走行道路の交通状況、交差点を直進した後の走行道路の交通状況、交差点を直進する際に横断する道路の交通状況等)等によって異なるものであり、更には、上記(i)〜(vi)のうちの何れか2つ以上の組合せによっても異なるものである(例えば、接続部分が十字路であっても、信号の有無や道路の属性によって当該移動の困難さが異なる)。
【0030】
このような点が考慮され、各ノードには、そのノードに応じたノードコストが設定されることになる。一例を挙げると、幅員が広い道路から交差点を介して狭い道路へ車両が右折する場合には、曲がりにくいので、ノードコストが大きく設定される。また、その場合、当該交差点に信号が無い場合には、更に曲がりにくいので、更にノードコストが大きく設定される。更に、その場合、右折後の道路が渋滞している場合には、更に曲がりにくいので、更にノードコストが大きく設定される。
【0031】
経路案内データには、後述する経路案内に用いられる画像データ、文字データ、及び音声データ等が含まれる。
【0032】
なお、経路探索や経路案内(経路誘導)を行うためのデータ及びプログラムは、情報記憶部4に記録する代わりに、例えば、インターネット及び移動体通信網(無線基地局を含む)等を含む通信ネットワークに接続された所定のサーバに記憶保存しておき、適宜、当該サーバから送信され、システム制御部8へ出力されるように構成しても良い。
【0033】
表示部5は、例えば、描画処理部、バッファメモリ及びディスプレイ(例えば、液晶ディスプレイ、又は有機ELディスプレイ等)等を備えており、描画処理部が、システム制御部8の制御の下、地図画像データや、経路案内に係る画像データをバッファメモリに展開、描画した後、ディスプレイにおける表示画面に表示(例えば、地図表示、経路表示、経路の距離や料金等の一覧表示等)するようになっている。また、当該ディスプレイには、システム制御部8の制御の下、ユーザに対し入力指示や選択指示を促すための例えばメニューも表示される。
【0034】
音声出力部6は、例えば、DAC(デジタル/アナログ信号変換器)、アンプ、スピーカ等を備えており、システム制御部8から出力された経路案内に係る音声データをDACによりD/A変換した後、アンプにより増幅してスピーカから音波として出力するようになっている。
【0035】
操作部7は、ユーザからの入力指示や選択指示(例えば、目的地の指示)等を受け付けるための複数の操作ボタンを有しており、ユーザにより押下された操作ボタンに対応する指示信号をシステム制御部8へ出力するようになっている。
【0036】
システム制御部8は、演算機能を有するCPU、作業用RAM、各種データやプログラムを記憶するROM等を備えており、当該ナビゲーション装置Sにおける構成要素全体を統括制御するようになっている。そして、システム制御部8のCPUが、例えば情報記憶部4に記憶された経路探索や経路案内等を行うためのプログラム(本願の経路探索処理プログラムを含む)を読み出し実行することにより、現在位置算出部8aと、リンクコスト算出手段としてのリンクコスト算出部8bと、リンク学習度設定手段としてのリンク学習度設定部8cと、判別手段、取得手段、及びノードコスト算出手段としてのノードコスト算出部8dと、ノード学習度設定手段としてのノード学習度設定部8eと、経路探索手段としての経路探索部8fと、提示手段としての経路案内部8gとして、それぞれ機能するようになっている。
【0037】
現在位置算出部8aは、センサ部2から出力された速度データ、方位データ、加速度データ、走行距離データ等を受け付け、これらのデータに基づいて、車両の現在位置情報(経度及び緯度や、地図データにおける座標(X,Y))を算出する。また、現在位置検出部8aは、GPS受信部1からのGPSデータに基づいて、適宜、上記算出した車両の現在位置情報を補正する。なお、車両の現在位置情報の算出方法は、公知の技術であるので、更なる詳しい説明を省略する。
【0038】
リンクコスト算出部8bは、例えば第1地点としての現在地から第2地点としての目的地に至る経路候補を構成する複数のリンクのそれぞれのリンクコストを取得して設定し、これらのリンクコストに基づいて各経路候補の総リンクコストを計算する。各リンクに設定されるリンクコストは、例えば、予め設定された複数のリンクコストのうちから、当該リンクに対応する道路の距離、属性、交通状況等に応じた(見合った)リンクコストが取得されるか、或いは、当該リンクに対応する道路の距離、属性、交通状況等のパラメータを用いて計算されて取得される。
【0039】
リンク学習度設定部8cは、車両がリンクに対応する道路を通る(走行する)頻度に応じて当該リンクの学習度を設定する。当該リンクの学習度は、例えば、車両がリンクに対応する道路を通る(走行する)回数に比例して(つまり、当該回数が多くなれば、リンクの学習度が大きくなる)設定される値である。
【0040】
そして、リンクコスト算出部8bは、上記リンクに設定されたリンクコスト及び当該リンクに設定されたリンクの学習度を用いて、当該リンクにおける新たなリンクコストを算出する。新たなリンクコストが算出された場合、リンクコスト算出部8bは、これらの新たなリンクコストに基づいて各経路候補の総リンクコストを計算することになる。なお、新たなリンクコストは、例えば、当該リンクの学習度が大きくなるにつれて、小さくなっていく。つまり、当該リンクに対応する道路を通る頻度が高くなるに従い、リンクコストは小さくなっていくことになる。
【0041】
ノードコスト算出部8dは、上記少なくとも2つ以上のリンクを接続する複数のノードにおけるそれぞれのノードコストを取得して設定し、これらのノードコストに基づいて各経路候補の総ノードコストを計算する。
【0042】
各ノードに設定されるノードコストは、例えば、予め設定された複数のノードコストのうちから、(i)接続部分を介した車両の移動の方向、(ii)接続部分を介した移動を規制する規制要素の有無、(iii)接続部分への道路の接続数、(iv)接続部分の道路の接続形状、(v)接続部分に接続される道路のうち少なくとも何れか一つの道路の属性、(vi)接続部分に接続される道路のうち少なくとも何れか一つの道路の状況のうちの一つ又は何れか2つ以上の組合せに応じた(見合った)ノードコストが取得されるか、或いは、上記(i)乃至(vi)の要素を考慮したパラメータを用いて計算されて取得される。
【0043】
そのため、ノードコスト算出部8dは、各ノードについて、そのノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する際における、当該接続部分を介した車両の移動の方向の判別と、当該移動を規制する規制要素の有無の判別と、当該ノードへのリンクの接続数の判別と、当該ノードに対応する接続部分へのリンクに対応する道路の接続形状の判別と、当該ノードに接続されるリンクのうち少なくとも何れか一つのリンクに対応する道路の属性の判別と、当該道路の状況の判別と、の少なくとも何れか一つの判別を行う。
【0044】
ノード学習度設定部8eは、ノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する頻度に応じて当該ノードの学習度を設定する。当該ノードの学習度は、例えば、車両がノードに対応する接続部分を通る回数に比例して(つまり、当該回数が多くなれば、ノードの学習度が大きくなる)設定される値である。
【0045】
そして、ノードコスト算出部8dは、上記ノードに設定されたノードコスト及び当該ノードに設定されたノードの学習度を用いて、当該ノードにおける新たなノードコストを算出する。新たなノードコストが算出された場合、ノードコスト算出部8dは、これらの新たなノードコストに基づいて各経路候補の総ノードコストを計算することになる。なお、新たなノードコストは、例えば、当該ノードの学習度が大きくなるにつれて、小さくなっていく。つまり、当該ノードに対応する接続部分を通る頻度が高くなるに従い、ノードコストは小さくなっていくことになる。
【0046】
経路探索部8fは、上記リンクコスト及び上記ノードコストに基づいて上記経路候補のうちから最適経路を探索する。例えば、リンクコスト算出部8bにより算出された総リンクコストと、ノードコスト算出部8dにより算出された総ノードコストとの和である総コストを、各経路候補毎に算出して、そのうち、総コストが小さい(例えば、最小の)経路候補を最適経路として探索する。なお、最適経路は、一つだけでなく、複数探索されても良い。
【0047】
経路案内部8gは、現在位置算出部8aにより算出された車両の現在位置を認識しつつ、当該現在位置が道路上に位置するか否かの整合性、いわゆるマップマッチング処理を行い、かつ、経路探索部8fにより探索された最適経路を用いて、当該経路に関する情報(最適経路の経路(ルート)案内(誘導)、最適経路の距離や料金等)をユーザに提示、すなわち、当該情報を表示部5に表示させたり、音声出力部6から音声出力させたりする。
【0048】
次に、図3乃至図5等を参照して、本実施形態における車載用ナビゲーション装置Sの動作を説明する。
【0049】
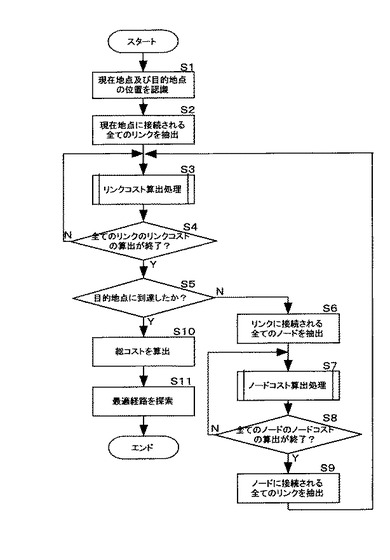
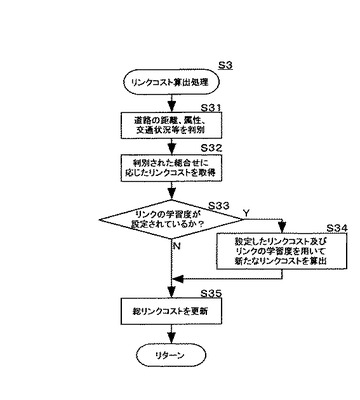
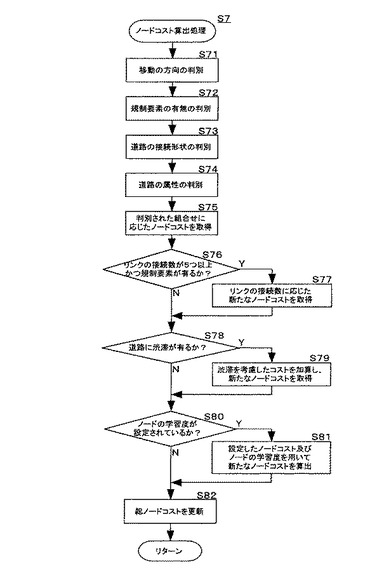
図3は、システム制御部8における経路探索処理の一例を示すフローチャートであり、図4は、図3のステップS3におけるリンクコスト算出処理の一例を示すフローチャートであり、図5は、図3のステップS7におけるノードコスト算出処理の一例を示すフローチャートである。
【0050】
(経路探索処理)
始めに、図3を用いて、経路探索処理のメインルーチンの一例について説明する。
【0051】
先ず、ユーザが、例えば操作部7を操作して車載用ナビゲーション装置Sを起動させると、表示部5におけるディスプレイ上にメニュー画面が表示される。このようなメニュー画面において、ユーザが操作部7を操作して所望の目的地を入力して経路探索指示を行うと、図3に示す経路探索処理が開始される。
【0052】
図3の処理において、先ず、システム制御部8(経路探索部8f)は、情報記憶部4から経路探索を行うための地図データ、リンクデータ、及びノードデータ等を読み出し、現在位置算出部8aにて算出された車両の現在地点の位置、及び、ユーザにより入力された目的地点の位置を認識する(ステップS1)。
【0053】
次いで、システム制御部8(経路探索部8f)は、現在地点に接続される全てのリンクを抽出し(ステップS2)、リンクテーブルに登録(例えば、リンクIDを登録)する。
【0054】
次いで、システム制御部8(リンクコスト算出部8b)は、リンクテーブルに登録されたリンクのリンクコスト算出処理を実行する(ステップS3)。なお、当該リンクコスト算出処理の詳細については図4に示すが後述する。
【0055】
次いで、システム制御部8(経路探索部8f)は、上記リンクテーブルに登録された全てのリンクのリンクコストの算出が終了したか否かを判別し(ステップS4)、終了していない場合には(ステップS4:N)、上記ステップS3に戻る。一方、上記登録された全てのリンクのリンクコストの算出が終了した場合には(ステップS4:Y)、ステップS5に移行される。
【0056】
ステップS5においては、システム制御部8(経路探索部8f)は、目的地点に到達したか否かを判別し、目的地点に到達していない場合には(ステップS5:N)、ステップS6に移行し、目的地点に到達した場合には(ステップS5:Y)、ステップS10に移行する。
【0057】
ステップS6においては、システム制御部8(経路探索部8f)は、上記リンクテーブルに登録されたリンクに接続される全てのノードを抽出し、ノードテーブルに登録(例えば、ノードIDを登録)する。
【0058】
次いで、システム制御部8(ノードコスト算出部8d)は、ノードテーブルに登録されたノードのノードコスト算出処理を実行する(ステップS7)。なお、当該ノードコスト算出処理の詳細については図5に示すが後述する。
【0059】
次いで、システム制御部8(経路探索部8f)は、上記ノードテーブルに登録された全てのノードのノードコストの算出が終了したか否かを判別し(ステップS8)、終了していない場合には(ステップS8:N)、上記ステップS7に戻る。一方、上記登録された全てのノードのノードコストの算出が終了した場合には(ステップS8:Y)、ステップS9に移行される。
【0060】
ステップS9においては、システム制御部8(経路探索部8f)は、ノードテーブルに登録される全てのノードに接続される全てのリンクを抽出し(ステップS9)、リンクテーブルに新たに登録して、ステップS3に戻る。そして、システム制御部8(リンクコスト算出部8b)は、ステップS3にて、上記と同様、新たに登録された全てのリンクのリンクコストを算出することになる(ステップS4)。そして、ステップS5にて未だ目的地に到達していないと判別された場合には(ステップS5:N)、それらの新たに追加されたリンクに接続される全てのノードが抽出され(ステップS6)、新たにノードテーブルに登録され、それらのノードのノードコストが算出される(ステップS7)。
【0061】
このように、目的地点に到達されるまで、リンクコスト及びノードコストの計算が行われる。そして、ステップS3で算出されたリンクコストは、各経路候補毎に積算され、総リンクコストとしてシステム制御部8(経路探索部8f)により取得される。そして、ステップS7で算出されたノードコストもまた、各経路候補毎に積算され、総ノードコストとしてシステム制御部8(経路探索部8f)により取得される。つまり、現在地点から目的地点までの経路候補が複数あるとすると、それらの経路候補毎に、総リンクコスト及び総ノードコストが算出されることになる。
【0062】
そして、ステップS10においては、システム制御部8(経路探索部8f)は、各経路候補毎に、上記算出された総リンクコストと総ノードコストの和である総コストを算出し(ステップS10)、そのうち、総コストが小さい(例えば、最小の)経路候補を最適経路として探索(ステップS11)して決定する。
【0063】
こうして、最適経路が探索されると、システム制御部8(経路案内部8g)は、経路案内処理を実行、すなわち、現在位置算出部8aにより算出された車両の現在位置を認識しつつ、探索された最適経路を用いて、当該経路に関する情報(最適経路の経路(ルート)案内(誘導)、最適経路の距離や料金等)をユーザに提示、すなわち、当該情報を表示部5に表示させたり、音声出力部6から音声出力させたりする。
【0064】
なお、上記処理においては、総リンクコストと、総ノードコストとは別々に積算されて算出される例を示したが、例えば、経路候補毎に、リンクコスト及びノードコストが算出される度に総コストに積算していくように構成しても良い(この場合、ステップS10の処理は不要となる)。
【0065】
(リンクコスト算出処理)
次に、図4を用いて、経路探索処理のサブルーチン、すなわちリンクコスト算出処理の一例について説明する。
【0066】
図4の処理において、先ず、システム制御部8(リンクコスト算出部8b)は、上記リンクテーブルに登録されたリンクのうちの1つリンクを選定し、当該選定されたリンクに対応する道路の距離、属性、交通状況等を、リンクデータや交通情報受信部3からの道路交通情報に基づき判別し(ステップS31)、その判別結果に基づいて、例えば、予め設定された複数のリンクコストのうちから、判別された道路の距離、属性、交通状況等の組合せに応じたリンクコストを取得(例えば、RAMの特定のアドレスに記憶)し(ステップS32)、当該リンクコストを当該リンク(リンクID)に対して設定する。なお、当該リンクコストは、その都度、上記判別された道路の距離、属性、交通状況等のパラメータが所定の計算式に代入され計算の上、取得されるように構成しても良い。また、リンクコストの算出において、上述パラメータ以外にも例えば平均旅行時間(リンクに対応する道路を通過するのにかかる平均時間)や車両の平均速度、道路の制限速度のパラメータを用いても良い。
【0067】
次いで、システム制御部8(リンクコスト算出部8b)は、上記選定されたリンクの学習度が設定されているか否かを判別し(ステップS33)、設定されている場合には(ステップS33:Y)、上記取得し、設定したリンクコスト、及び当該リンクの学習度(リンク学習度設定部8cから取得)を用いて当該リンクにおける新たなリンクコストを算出する(ステップS34)。一方、リンクの学習度が設定されていない場合には(ステップS33:N)、ステップS35に移行される。
【0068】
この新たなリンクコストは、例えば、下記(1)式により算出される。
LC=(100−K1×S)×LC0/100・・・(1)
【0069】
ここで、“LC”は、新たなリンクコストを示し、“LC0”は、基のリンクコスト(上記設定されたリンクコスト)を示す。また、“S”は、リンクの学習度を示しており、例えば当該リンクに対応する道路を通った回数となる。また、“K1”は、新たなリンクコストLCと基のリンクコストLC0との間の変化の割合を規定する定数又は関数である。
【0070】
次いで、システム制御部8(リンクコスト算出部8b)は、最終的に取得又は算出されたリンクコストを、これに対応する経路候補(つまり、当該リンクに対応する道路を通る経路候補)の総リンクコストに加算してこれを新たな総リンクコストとして記憶(更新)し(ステップS35)、図3に示すに処理に戻る(ステップS4に移行する)。このように、リンクコストが算出される度に、これに対応する経路候補の総リンクコストに積算されていくことになる。
【0071】
なお、上記ステップS33及びS34におけるリンクの学習度を考慮したリンクコストの算出処理は、学習機能ロック等により実行されなくすることも可能であり、この場合、ステップS35では、上記設定されたリンクコストを、これに対応する経路候補の総リンクコストに加算してこれを新たな総リンクコストとして記憶(更新)することになる。
【0072】
(ノードコスト算出処理)
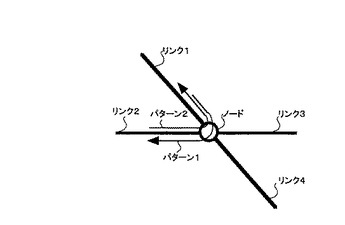
次に、図5等を用いて、経路探索処理のサブルーチン、すなわちノードコスト算出処理の一例について説明する。なお、以下の説明において、T字路、十字路、五差路等の交差点を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する場合における「1のリンク」を「進入リンク」と称し、「他のリンク」を「退出リンク」と称するものとする。また、十字路を介して進入リンクに対応する道路から退出リンクに対応する道路を直進する場合において、進入リンク及び退出リンクに対応する道路と直交する道路(つまり、進入リンク及び退出リンク以外のリンクに対応する道路であって、車両が横断する道路)に対応するリンクを交差リンクと称するものとする。また、十字路を介して進入リンクに対応する道路から退出リンクに対応する道路に右左折する場合において、当該十字路を右左折する前に対向する(前方の)道路を対向リンクと称するものとする。
【0073】
図5の処理において、先ず、システム制御部8(ノードコスト算出部8d)は、上記ノードテーブルに登録されたノードのうちの1つノードを選定し、当該選定されたノードに対応する接続部分を介して進入リンクに対応する道路から退出リンクに対応する道路へ車両が移動する際における、当該移動の方向を判別し(ステップS71)、その結果を記憶する。かかる方向の判別においては、例えば、進入リンク及び退出リンクに対応する道路の方位より、進入リンクと退出リンクとの成す角度が算出され、当該角度が、予め設定された右折の角度範囲に含まれる場合には、右折方向と判別され、予め設定された左折の角度範囲に含まれる場合には、左折方向と判別され、予め設定された直進の角度範囲に含まれる場合には、直進方向と判別される。なお、右折又は左折の角度範囲を複数段階に設定し、同じ右折又は左折であっても、車両が曲がる角度に応じて区別しても良い。
【0074】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードに対応する接続部分を介した移動を規制する規制要素(例えば、信号)の有無を判別する(ステップS72)し、その結果を記憶する。かかる規制要素の有無は、地図データにより判別することができる。
【0075】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードに対応する接続部分への道路の接続形状(例えば、T字路、十字路)を判別し(ステップS73)、その結果を記憶する。かかる接続形状は、当該ノードに接続される進入リンクとそれ以外のリンクとのなす角度に基づき判別することができる。
【0076】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードに対応する接続部分に接続される道路のうち、例えば進入リンク及び退出リンクに対応する道路の属性(例えば、幅員が広い(例えば、10m以上)、幅員が普通(例えば、5m以上10m未満、幅員が狭い(例えば、5m未満))を判別し(ステップS74)、その結果を記憶する。なお、上述したように、進入リンク及び退出リンクに対応する道路の幅員の代わりに当該道路の車線数を判別するように構成しても良い。
【0077】
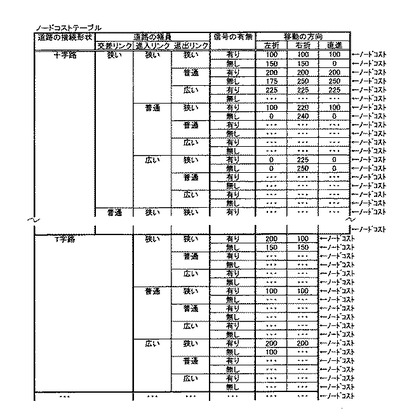
そして、システム制御部8(ノードコスト算出部8d)は、上記ステップS71乃至S74における判別結果に基づいて、予め設定された複数のノードコスト(例えば、図6に示すようなノードコストテーブルに登録されたノードコスト)のうちから、判別された道路の接続形状、道路の属性、規制要素の有無、及び移動の方向の組合せに応じたノードコストを取得(例えば、RAMの特定のアドレスに記憶)する(ステップS75)。なお、当該ノードコストは、その都度、上記判別された道路の接続形状、道路の属性、規制要素の有無、及び移動の方向等のパラメータが所定の計算式に代入され計算の上、取得されるように構成しても良い。また、上記ステップS71乃至S74のうち、全ての判別処理を行わなくとも良く、少なくとも何れか一つの判別処理であっても良い。
【0078】
図6は、道路の接続形状、道路の属性、規制要素の有無、及び移動の方向の組合せに応じて予め設定された複数のノードコストが登録されたノードコストテーブルの一例を示す図である。このようなノードコストテーブルは、例えば、経路探索を行うためのデータと同様、CD−ROM、DVD−ROM、又はHD等に予め記録される。
【0079】
図6に示すように、ノードコストは、道路の接続形状(例えば、T字路、十字路)、道路の属性(例えば、道路の幅員)、規制要素(例えば、信号)の有無、及び移動の方向(例えば、左折、右折、直進)の組合せによって異なっている。
【0080】
図6に示すようなノードコストは、一定の基本原則(経験則が含まれる)が考慮されて決定される。この基本原則として、例えば、ノードに対応する接続部分が信号のある十字路であり、進入リンクに対応する道路の幅員が広い場合、青信号の時間が長く左折の信号待ち時間が短くなるため車両の左折の困難さが低くなるが、交通量も多く右折の信号待ち時間が長くなるため右折の困難さが高くなる。また、この場合に、例えば、退出リンクに対応する道路の幅員が狭い場合、右折レーンがなかったり、右折専用の信号が無かったりするため車両の右折の困難さが更に高くなる。
【0081】
また、例えば、ノードに対応する接続部分が信号のある十字路であり、進入リンクに対応する道路の幅員が狭く、退出リンクに対応する道路の幅員が広い場合、右左折の信号待ち時間が長くなるため車両の右左折の困難さが高くなり、また、当該十字路に信号がない場合、右折の困難さが更に高くなる。
【0082】
また、例えば、ノードに対応する接続部分が信号のある十字路であり、交差リンクに対応する道路の幅員が広く退出リンクに対応する道路の幅員が狭い場合、直進の信号待ち時間が長くなるので、車両の直進(横断)の困難さが高くなり、その逆の場合、直進の信号待ち時間が短くなるので、直進の困難さが低くなる。また、例えば、ノードに対応する接続部分が信号のない十字路であり、交差リンクに対応する道路の幅員が広く退出リンクに対応する道路の幅員が狭い場合(これらの道路の幅員の差が大きいほど)、車両の直進(横断)の困難さが極めて高くなる。
【0083】
また、例えば、ノードに対応する接続部分が信号のあるT字路である場合、右折と左折の困難さは変わらない(この場合と、信号のある十字路と比較すると、右折の困難さはT字路の方が低くなる。)。また、この場合に、退出リンクに対応する道路の幅員が広い場合、右左折の信号待ち時間が長くなるため右左折の困難さが高くなり、また、当該T字路に信号がない場合、右折の困難さが極めて高くなる。
【0084】
以上、基本原則の一例を挙げたが、この他にも様々な要因が考慮されてノードコストが決定されることになる。また、このような基本原則は、国毎に異なる場合もあるので、その国の交通規則等に応じて決められる。例えば、英国では、日本と同様、車両が左側通行であるので、上記基本原則が適用できるが、ドイツやフランスでは、車両が右側通行であるので、上記基本原則において右折の困難さと左折の場合の困難さが反転されることになる。また、例えば米国のように、赤信号であっても右折が可能である交通規則であれば、右折と左折の困難さの差を更に大きく設定しても良い。
【0085】
なお、図6に示すノードコストテーブルにおいては、上記移動の方向として3種類の方向(左折方向、右折方向、直進方向)を例にとったが、これに限定されるものではなく、車両が曲がる角度に応じて4種類以上の方向に分け、ノードコストを区別しても良い。また、上記規制要素として信号を例にとったが、その他にも、例えば、標識(例えば、一時停止)、有料道路の料金所、交通規制人、建物等の障害物等の要素を組み込んでノードコストを区別しても良い。また、上記道路の属性として3種類の幅員(広い、普通、狭い)を例にとったが、4種類以上の幅員に分け、ノードコストを区別しても良く、また、道路の車線数を組み込んでノードコストを区別しても良い。また、上記道路の接続形状として、2種類の形状(T字路、十字路)を例にとったが、3種類以上の形状(例えば、Y字路、五差路等含める)に分け、ノードコストを区別しても良い。このようにノードコストを区別してノードコストテーブルに登録した場合、それに応じて上記ステップS71乃至S74における判別処理における判別の内容も追加、変更されるように構成される(例えば、標識(例えば、一時停止)、有料道路の料金所等の有無の判別)。
【0086】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードへのリンクの接続数が5つ以上であり、かつ、上記規制要素(例えば、信号)が有であるか否かを判別し(ステップS76)、この条件を満たす場合には(ステップS76:Y)、ステップS75にて取得したノードコストに基づいて、リンクの接続数に応じた新たなノードコストを算出(例えば、リンクの接続数を“n”、基のノードコストを“NC0”、新たなノードコストを“NC”とすると、NC=(n−3)×NC0の式にて算出)して取得する(ステップS77)。これは、五差路、六差路・・・と、リンクに対応する道路の接続数が増えていくと、信号の待ち時間が増え移動の困難さが増していくので、その分、ノードコストを増やす趣旨である。
【0087】
次いで、システム制御部8(ノードコスト算出部8d)は、交通情報受信部3から道路の道路交通情報を取得し、例えば、上記選定されたノードへの接続される退出リンクに対応する道路の交通状況の判別、例えば渋滞が有るか否かを判別し(ステップS78)、渋滞が有る場合には(ステップS78:Y)、ステップS77にて取得したノードコストに当該渋滞を考慮したコストを加算し、新たなノードコストを取得する(ステップS79)。これは、進入リンクに対応する道路側に渋滞情報がなくても(渋滞情報は、全ての道路について提供されるわけではなく、渋滞情報が有り実際渋滞している道路に接続している道路は、渋滞情報が提供されていなくても、渋滞していることが多いのでこれを考慮する)、渋滞している道路(つまり、退出リンクに対応する道路)に右左折で入る場合、入ることのできる車両の台数が限られるので、入る前の道路(つまり、進入リンクに対応する道路)も渋滞していることが多いため車両の右左折の困難さが増すので、その分、ノードコストを増やす趣旨である。また、渋滞している道路から右折する場合、右折の信号待ち時間が余計に長くなる(例えば、複数回の青が切り替わる)ため車両の右折の困難さが増すので、その分、ノードコストを増やす趣旨である。また、有料道路のインターチェンジにおけるノードコストであれば、その先の有料道路(つまり、退出リンクの道路)の渋滞状況に応じてノードコストを増やす趣旨である。
【0088】
こうして、上記ステップS79にて取得されたノードコストが、当該ノード(ノードID)に対して設定されることになる。
【0089】
なお、上記ステップ78においては、退出リンクに対応する道路の交通状況(渋滞)の判別を行うように構成したが、これに限定されるものではなく、例えば、対向リンクに対応する道路の交通状況(渋滞)の判別を行うように構成しても良い。つまり、対向リンクに対応する道路が渋滞である場合には、車両が右折の困難性が増すので、その分、ノードコストを増やす趣旨である。
【0090】
また、上記退出リンクに対応する道路の交通状況(渋滞)の判別を、上記ステップS71乃至S74において行うように構成し、ノードコストテーブルに道路の交通状況(渋滞)を組み込んでノードコストを区別するように構成しても良い。
【0091】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードの学習度が設定されているか否かを判別し(ステップS80)、設定されている場合には(ステップS80:Y)、上記ステップS79にて取得し、設定したノードコスト及び当該ノードの学習度(ノード学習度設定部8eから取得)を用いて当該ノードにおける新たなノードコストを算出する(ステップS81)。これは、ノードに対応する接続部分を介して進入リンクに対応する道路から退出リンクに対応する道路へ車両が同じように移動する場合であっても、その移動する頻度(例えば、回数)が大きくなっていけば、慣れにより車両が移動の困難性が減っていくので、その分、ノードコストを減らす趣旨である。一方、ノードの学習度が設定されていない場合には(ステップS80:N)、ステップS82に移行される。
【0092】
この新たなノードコストは、例えば、下記(2)式により算出される。
NC=(100−K2(S1+S2)/2)×NC0/100・・・(2)
【0093】
ここで、“NC”は、新たなノードコストを示し、“NC0”は、基のノードコスト(上記ステップS79にて取得されたノードコスト)を示す。また、“(S1+S2)/2”は、ノードの学習度を示しており、進入リンクの学習度S1(例えば、進入リンクに対応する道路を通った回数)と、退出リンクの学習度S2(例えば、退出リンクに対応する道路を通った回数)との和を“2”で除した値となる。これにより、上述した各リンクに設定されるリンクの学習度を利用することができる。なお、ノードの学習度を進入リンクの学習度S1と退出リンクの学習度S2から求めるのではなく、ノード学習度設定部8eが、当該ノードに対応する接続部分を車両が通る回数をカウントしてそれをノードの学習度として設定するように構成しても良い。
【0094】
ところで、同じリンクに対応する道路、かつ同じノードに対応する交差点を通る場合であっても、例えば、図7に示すパターン1とパターン2のように、その移動の方向によって、車両の移動の困難さは異なるものである。すなわち、パターン1の場合は車両が交差点を右折するのに対し、パターン2の場合は車両が交差点を左折することになるので、上記ステップS75にて取得されるノードコストは区別されることになる。
【0095】
しかし、上記(2)式で示されるノードの学習度((S1+S2)/2)は、パターン1の場合とパターン2の場合とで区別されない。つまり、ノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する場合と、当該ノードに対応する接続部分を介して上記他のリンクに対応する道路から上記1のリンクに対応する道路へ車両が移動する場合とで区別されない。そこで、パターン1の場合におけるノードの学習度を“S12”とし、パターン2の場合におけるノードの学習度を“S21”として、ノード学習度設定部8eが、例えば、当該ノードに対応する接続部分を車両が通る回数をS12とS21とで別々にカウントし、パターン1の場合とパターン2の場合とを区別してノードの学習度を設定するように構成すればより望ましい。
【0096】
このように、パターン1の場合とパターン2の場合とを区別してノードの学習度を設定した場合、パターン1の場合における新たなノードコストは、下記(3)式で算出され、パターン2の場合における新たなノードコストは、下記(4)式で算出されることになり、パターン1の場合とパターン2の場合とでノードコストが区別されることになる。
NC=(100−K2×S12)×NC0/100・・・(3)
NC=(100−K2×S21)×NC0/100・・・(4)
【0097】
また、上記(2)乃至(4)式における“K2”は、新たなノードコストNCと基のノードコストNC0との間の変化の割合(比率)を規定する定数又は関数であり、上述した新たなリンクコストLCと基のリンクコストLC0との間の変化の割合K1(上記(1)式)と同一とすることが望ましい。これにより、車両がある経路を走行した場合に、リンクコスト及びノードコストは、その走行頻度に応じて同様の割合(比率)で減少するので、本願の課題にて述べた不都合を回避することができる。すなわち、本願の課題で述べた経路Aと経路Bとを車両が同一の頻度で走行した場合に、経路Aの総コストが、例えば、“700”(総リンクコストが“500”、総ノードコストが“200”)となり、経路Bの総コストが、例えば、“800”(総リンクコストが“750”、総ノードコストが“50”)となり、学習前と比べて総コストが逆転することなく、最適経路となるべき経路Aが正常に最適経路として選ばれることになる。なお、「経路Aと経路Bとを車両が同一の頻度で走行した場合に、学習前と比べて総コストが逆転することなく、最適経路となるべき経路Aが正常に最適経路として選ばれる」ことを満足すれば、上記(2)乃至(4)式における“K2”は、上記(1)式における“K1”と必ずしも同一である必要はなく、同程度であれば良い(K1とK2とに一定差があってもよい)。
【0098】
システム制御部8(ノードコスト算出部8d)は、最終的に取得又は算出されたノードコストを、これに対応する経路候補(つまり、当該ノードに対応する接続部分を通る経路候補)の総ノードコストに加算してこれを新たな総ノードコストとして記憶(更新)し(ステップS82)、図3に示すに処理に戻る(ステップS8に移行する)。このように、ノードコストが算出される度に、これに対応する経路候補の総ノードコストに積算されていくことになる。
【0099】
なお、上記ステップS80及びS81におけるノードの学習度を考慮したノードコストの算出処理は、学習機能ロック等により実行されなくすることも可能であり、この場合、ステップS82では、ステップS79にて取得され、設定されたノードコストを、これに対応する経路候補の総ノードコストに加算してこれを新たな総ノードコストとして記憶(更新)することになる。
【0100】
以上説明したように、上記実施形態によれば、各ノードについて、そのノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する際における、当該接続部分を介した車両の移動の方向の判別と、当該移動を規制する規制要素の有無の判別と、当該ノードへのリンクの接続数の判別と、当該ノードに対応する接続部分へのリンクに対応する道路の接続形状の判別と、当該ノードに接続されるリンクのうち少なくとも何れか一つのリンクに対応する道路の属性の判別と、当該道路の状況の判別と、の少なくとも何れか一つの判別を行い、これらの一つ又は何れか2つ以上の組合せに応じた(見合った)ノードコストを取得して、当該ノードコスト及び上記リンクコストに基づいて最適経路を探索するように構成したので、より経路の総コストの精度を向上させ、より最適な経路を精度良く探索することができ、ユーザが、真に、車両で走行しやすい経路の算出が可能となる。
【0101】
また、リンクコストばかりでなく、ノードコストに対しても学習の概念を適用し、車両の走行頻度に応じて、リンクコストとノードコストが同程度の割合で変化するように構成したので、走行頻度が同程度の経路同士においては、学習前と比べて総コストが逆転するという不都合を回避でき、正確に(精度良く)最適経路を探索することができる。
【0102】
なお、上記実施形態においては、ノードに対応する接続部分を介した車両の移動の方向、当該接続部分を介した移動を規制する規制要素の有無等を判別して、判別結果に応じたノードコストを取得するように構成したが、例えば、規制要素(例えば、信号)の待ち時間情報や変化サイクル情報等を予め経路探索を行うためのデータに含めて記録しておき、かかる規制要素が有りと判別されたノードについては、かかる規制要素(例えば、信号)の待ち時間や変化サイクルを更に判別して、これらに応じたノードコストを取得するように構成しても良い。また、経路探索処理を実行する時刻、又は経路案内処理を開始する時刻による交通量や信号の変化サイクルの変化を考慮して、ノードコストを動的に設定するように構成しても良い。
【0103】
(他の実施例1)
上記実施形態においては、車両に搭載された車両ナビゲーション装置Sに対して本願の経路探索装置及び方法等を適用した場合の例を示したが、これに限定されるものではなく、いわゆる通信ナビゲーションシステムに対して本願の経路探索装置及び方法等を適用するように構成しても良い。
【0104】
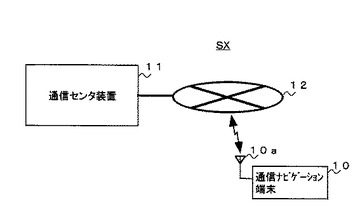
図8は、通信ナビゲーションシステムの概要構成例を示す図である。図8に示すように、通信ナビゲーションシステムSXは、車両に搭載される通信ナビゲーション端末10と、当該通信ナビゲーション端末10がアンテナ10a及び移動体通信ネットワーク(無線基地局等を含む)12を介して接続される通信センタ装置(固定設置されるサーバ装置)11と、を含んで構成される。
【0105】
通信ナビゲーション端末10は、上述した車載用ナビゲーション装置SにおけるGPS(Global Positioning System)受信部1、センサ部2、交通情報受信部3、表示部5、音声出力部6、操作部7、及び移動体通信ネットワーク12を介して通信センタ装置11と通信を行うための通信部等を備え、更に、これらを統括制御し、かつ通信センタ装置11との情報の送受信を制御する端末制御部(図示せず)を備えている。
【0106】
一方、通信センタ装置11は、移動体通信ネットワーク12を介して通信ナビゲーション端末10と通信を行うための通信部、上述した車載用ナビゲーション装置Sにおける情報記憶部4に記憶(記録)された経路探索や経路案内(経路誘導)等を行うためのデータ及びプログラム等を記憶する記憶部、及び車載用ナビゲーション装置Sにおけるシステム制御部8とほぼ同様の機能を有したシステム制御部(例えば、現在位置算出部8a、リンクコスト算出部8b、リンク学習度設定部8c、ノードコスト算出部8d、ノード学習度設定部8e、経路探索部8f、及び経路案内部8gを有する)等を備えている。
【0107】
このような構成において、通信センタ装置11は、通信ナビゲーション端末10からの移動体通信ネットワーク12を介した要求に応じて、適宜、必要最小限の地図データ等を通信ナビゲーション端末10に送信(提供)し、また、上述した図3乃至図5に示すような経路探索処理を実行、及び経路案内処理(経路案内部8gが、経路探索部8fにより探索された最適経路を用いて、通信ナビゲーション端末10を通じて経路に関する情報をユーザに提示する)を実行する。
【0108】
このような通信ナビゲーションシステムSXにおいても、上述した車載用ナビゲーション装置Sと同様の効果を奏することができる。
【0109】
(他の実施例2)
上記実施形態においては、車両を移動体の例とし、本願を車載用ナビゲーション装置Sや通信ナビゲーションシステムSXに対して適用した場合の例を示したが、これに限定されるものではなく、以下に示すように、様々なものに対して本願を適用することが可能であり、上記実施形態と同様の効果を奏することができる。
【0110】
例えば、移動体の例として歩行者(動物に適用しても良い)若しくは自転車等とし、歩行者若しくは自転車を運転する者が有する(或いは、自転車に設置される)携帯端末(例えば、携帯電話機、PDA(Personal Digital Assistant)、PHS(Personal Handyphone System)、又はノート型PC(Personal Computer))に対して本願を適用しても良く
、この場合、リンクに対応する「路」としては、例えば歩行者道路(歩道)も含まれることになり、「路の状況」としては、例えば歩道の混雑状況も含まれることになる。
【0111】
また、例えば、移動体の例として船舶又は航空機とし、船舶又は航空機に搭載されたナビゲーション装置に対して本願を適用しても良く、この場合、リンクに対応する「路」としては、例えば航路が相当し、ノードに対応する「接続部分」としては、例えば港又は飛行場が相当することになる。
【0112】
更に、例えば、移動体の例として電車の利用者とし、電車の利用者の携帯端末に対して本願を適用しても良く、この場合、リンクに対応する「路」としては、例えば路線(例えば、山手線等)が相当し、ノードに対応する「接続部分」としては、例えば「乗り換えのある駅」が相当し、「路の状況」としては、例えば電車内の混雑状況が相当することになる。また、この場合、電車の利用者の携帯端末若しくはこれに移動体通信網を介して接続されるサーバ装置には地図データとして電車の路線地図データが記憶され、更に電車の運行時刻等の情報も記憶されることになる。
【0113】
この場合、電車の利用者の携帯端末は、少なくとも2つのリンクが接続されるノードに対応する「乗り換えのある駅」を介して1のリンクに対応する「路線」から他のリンクに対応する「路線」へ「電車の利用者」が移動(乗り換える)する際における、当該移動を規制する規制要素(例えば、階段や改札)の有無の判別と、当該ノードへのリンクの接続数の判別と、当該ノードに対応する接続部分へのリンクに対応する「路線」の接続形状の判別と、当該ノードに接続されるリンクのうち少なくとも何れか一つのリンクに対応する「路線」の属性(例えば、運行間隔)の判別と、当該「路線」の状況(例えば、混雑状況)の判別と、の少なくとも何れか一つの判別を行う(乗り換えに要する時間を判別対象に加えても良い)。
【0114】
そして、電車の利用者の携帯端末は、当該判別結果に基づいて、前記規制要素の有無、前記リンクの接続数、前記リンクに対応する路の接続形状、前記路の属性、及び前記路の状況のうちの一つ又は何れか2つ以上の組合せに応じたノードコストを取得し、リンクコスト(上記実施形態と同様、路線の距離、属性等により決まる)及び前記取得されたノードコストに基づいて、第1地点(例えば、東京駅)から第2地点(例えば、渋谷駅)に至る経路候補のうちから最適経路を探索する(その他、リンク及びノードの学習度の設定、及びこれに基づく新たなリンクコスト及びノードコストの算出も勿論適用される)。なお、この場合も、上記図6に示すような、路線の接続形状、路線の属性、及び規制要素の有無等の組合せに応じて予め設定された複数のノードコストが登録されたノードコストテーブルが用意される。
【0115】
なお、本願は、上記実施例に限られるものではなく、その要旨を逸脱しない範囲でその他様々なものに対して適用可能である。
【0116】
また、本発明は、上記実施形態に限定されるものではない。上記実施形態は、例示であり、本発明の特許請求の範囲に記載された技術的思想と実質的に同一な構成を有し、同様な作用効果を奏するものは、いかなるものであっても本発明の技術的範囲に包含される。
【図面の簡単な説明】
【0117】
【図1】本実施形態に係る車載用ナビゲーション装置の概要構成例を示す図である。
【図2】ランナバウトと呼ばれる接続部分の一例を示す図である。
【図3】システム制御部8における経路探索処理の一例を示すフローチャートである。
【図4】図3のステップS3におけるリンクコスト算出処理の一例を示すフローチャートである。
【図5】図3のステップS7におけるノードコスト算出処理の一例を示すフローチャートである。
【図6】道路の接続形状、道路の属性、規制要素の有無、及び移動の方向の組合せに応じて予め設定された複数のノードコストが登録されたノードコストテーブルの一例を示す図である。
【図7】同じリンクに対応する道路、かつ同じノードに対応する交差点を通る場合であって、その移動の方向が異なる2つのパターンの一例を示す概念図である。
【図8】通信ナビゲーションシステムの概要構成例を示す図である。
【符号の説明】
【0118】
1 受信部
2 センサ部
3 交通情報受信部
4 情報記憶部
5 表示部
6 音声出力部
7 操作部
8 システム制御部
8a 現在位置算出部
8b リンクコスト算出部
8c リンク学習度設定部
8d ノードコスト算出部
8e ノード学習度設定部
8f 経路探索部
8g 経路案内部
10 通信ナビゲーション端末
11 通信センタ装置
12 移動体通信ネットワーク
S 車載用ナビゲーション装置
SX 通信ナビゲーションシステム
【技術分野】
【0001】
本発明は、例えば第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索装置及び方法等の技術分野に関する。
【背景技術】
【0002】
この種の経路探索装置等においては、例えば出発地或いは現在地から、目的地に至る複数の経路候補毎に、各リンクに設定されたリンクコスト(例えば、当該リンクに対応する道路等の区間における距離、道幅等の道路属性が考慮された重みづけ)を積算して総リンクコストを求め、総リンクコストが最小の経路候補を最適経路として探索することが知られている。
【0003】
ところで、特許文献1に開示されたナビゲーション装置においては、リンクコストばかりでなく、複数のリンクを接続するノードにおけるノードコストをも考慮して総コスト(総リンクコストと総ノードコストとの和)を求めるようになっており、当該ノードコストは、右左折を用いて決定することができ、右折の場合、曲がり難いため増大されるようになっている。
【0004】
また、特許文献2に開示されたナビゲーション装置においては、道路の走行頻度(走行回数)を考慮して、当該道路に対応するリンクのリンクコストを変化させる(いわゆる、学習機能)ようになっている。
【0005】
このような特許文献1又は特許文献2に開示されたナビゲーション装置によれば、運転者の要望に近い経路を探索することが可能となる。
【特許文献1】特開2000−329574号公報
【特許文献2】特開2003−57054号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、例えば、ノードに対応する交差点を介してあるリンクに対応する道路から別のリンクに対応する道路へ車両が移動(直進、右左折等による)する場合、当該移動の困難さは、右折の場合ばかりでなく、道路の幅、信号の有無、右左折レーンの有無、道路の形状(T字路、又は十字路等)、又は道路の交通状況(渋滞等)等の要素によっても、異なるものである。特許文献1に示されるような従来のナビゲーション装置においては、このような要素が全く考慮されていなかったため、より最適な経路を探索する上で限界があるという不都合がある。
【0007】
また、例えば、特許文献1に示されるような従来のナビゲーション装置におけるリンクコストを、特許文献2に示されるように走行頻度に応じて変化させた場合、当該リンクコストと、走行頻度に応じて変化しないノードコストとの関係において問題が生じる可能性がある。
【0008】
例えば、同一の出発地及び目的地を有し互いに異なる2つの経路であって、一方を経路(以下、「経路A」という)の総コストが“1400”(総リンクコストが“1000”、総ノードコストが“400”)であり、他方の経路(以下、「経路B」という)の総コストが“1600”(総リンクコストが“1500”、総ノードコストが“100”)であると仮定した(つまり、経路Aの方が、経路Bよりも右折又は左折の数は多いが距離は短いので、最適経路となる)場合に、車両が経路Aと経路Bとを同一の頻度で走行(均等に学習)すると、リンクコストは走行頻度に応じて減少するので、経路Aと経路Bとの距離差による違いは、相対的に学習を行う前よりも小さくなる。ところが、ノードコストは、学習前後で変わらないので、経路Aの総コスト(例えば、“900”(総リンクコストが“500”、総ノードコストが“400”))と、経路Bの総コスト(例えば、“850”(総リンクコストが“750”、総ノードコストが“100”))が、学習前と比べて逆転してしまい、最適経路となるべき経路Aでなく、経路Bが最適経路として選ばれてしまうという不都合がある。
【0009】
そこで、このような不都合の解消を一つの課題とし、より最適な経路を精度良く探索することが可能な経路探索装置、経路探索方法、及び経路探索処理プログラム等を提供することを目的する。
【課題を解決するための手段】
【0010】
上記課題を解決するため、請求項1に記載の発明は、第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索装置において、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段と、前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段と、前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段と、を備えることを特徴とする。
【0011】
請求項4に記載の発明は、第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索方法において、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う工程と、前記判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する工程と、前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する工程と、 を備えることを特徴とする。
【0012】
請求項5に記載の経路探索処理プログラムの発明は、第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索するコンピュータを、少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段、前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段、及び前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段として機能させることを特徴とする。
【発明を実施するための最良の形態】
【0013】
以下、本願の最良の実施形態を添付図面に基づいて説明する。なお、以下に説明する実施の形態は、車載用ナビゲーション装置に対して本願を適用した場合の実施形態である。また、この車載用ナビゲーション装置は、移動体の一例としての車両に搭載され、当該車両に搭載されたバッテリから電力が供給されて動作するようになっている。
【0014】
先ず、図1等を参照して、本実施形態における車載用ナビゲーション装置の構成及び機能を説明する。
【0015】
図1は、本実施形態に係る車載用ナビゲーション装置の概要構成例を示す図である。
【0016】
図1に示すように、車載用ナビゲーション装置Sは、GPS(Global Positioning System)受信部1、センサ部2、交通情報受信部3、情報記憶部4、表示部5、音声出力部6、操作部7、及びシステム制御部8等を備えて構成されている。
【0017】
GPS受信部1は、衛星軌道上に配置され地球を周回するGPS衛星から出力される航法電波を、図示しないアンテナを介して受信し、受信した信号に基づいて現在位置情報(経度及び緯度)を検出し、GPSデータとしてシステム制御部8へ出力するようになっている。
【0018】
センサ部2は、例えば、車速パルスに基づき車両の速度を検出する速度センサ、地磁気を利用して車両の走行方位を検出する方位センサ(ジャイロセンサ)、車両の加速度を検出する加速度センサ、車両の走行距離を検出する距離センサ等を備えており、これらのセンサによって検出された各データ(速度データ、方位データ、加速度データ、走行距離データ等)を、システム制御部8へ出力するようになっている。
【0019】
交通情報受信部3は、例えばVICS(Vehicle Information and Communication System)受信機を有しており、FM多重放送、道路(主要幹線道路や高速道路)上に設置された光(赤外線)ビーコン、電波(準マイクロ波)ビーコン等から発信された道路交通情報(例えば、渋滞等の交通状況に関する情報)を受信し、システム制御部8へ出力するようになっている。
【0020】
情報記憶部4は、例えば、CD(Compact Disc)−ROMドライブ、DVD(Digital Versatile Disc)−ROMドライブ、又はHD(Hard Disc)ドライブ等を備えており、各ドライブが、システム制御部8の制御の下、CD−ROM、DVD−ROM、又はHD等の記録媒体に記録された経路探索や経路案内(経路誘導)等を行うためのデータ及びプログラムを読み出し、システム制御部8へ出力するようになっている。
【0021】
ここで、経路探索や経路案内等を行うためのデータには、例えば、地図データ、リンクデータ、ノードデータ、及び経路案内データ、更には、ユーザに対し入力指示や選択指示を促すためのデータ(例えば、メニューデータ)等が含まれている。
【0022】
地図データは、例えばそれぞれ固有の識別番号が付加された複数の領域(メッシュ)データを有している。各領域データは、当該領域の画像、及び当該領域の一辺の長さ(つまり、実際の地形上の長さを地図の縮尺に応じて短縮した長さ)等のデータを有している。そして、地図データは、これらの領域データが縦横に複数連続して構成される。また、各領域データには、道路、交差点、屈曲点、分岐点、合流点、信号機、標識(例えば、一方通行)、有料道路の料金所、有料道路のインターチェンジ、著名な場所、及び建造物等を示す名称(マーク),位置情報(経度及び緯度や、地図データにおける座標(X,Y))等の情報が含まれる。
【0023】
そして、地図データにおける道路は、複数の線分としてのリンクから構成され、少なくとも2つのリンクは、1つのノードで接続される。このノードは、例えば、各道路の交差点、屈曲点、分岐点、合流点(ジャンクション)、又は有料道路のインターチェン等の接点(結節点)を含む接続部分に対応する。また、当該接続部分には、交差点等ばかりでなく、欧州などでよく見られるランナバウトと呼ばれる図2に示すような道路の接続部分(破線内)を含んでもよい。
【0024】
また、各リンクには、固有の識別番号(以下、「リンクID」という)が付与され、各ノードには、固有の識別番号(以下、「ノードID」という)が付与される。
【0025】
リンクデータは、上記各リンク毎に、リンクのリンクID、当該リンクが接続される2つのノードのノードID、当該リンクに対応する道路の距離(道路区間の距離)、属性、及び方位等の情報を有している(これらの情報は、各リンク毎に対応付けられている)。なお、道路の属性には、例えば、道路の幅員、道路の車線数、一方通行と双方通行の別、右左折レーンの有無等の情報が該当する。
【0026】
更に、各リンクには、そのリンクに対応する道路の距離や道路の属性等が考慮された重みづけとしてのリンクコストが設定される。例えば、道路の距離が短い場合や、道路の幅員が広い場合には、当該区間の走行に要する時間は短くなるので、リンクコストが小さく設定される。
【0027】
ノードデータは、上記各ノード毎に、ノードのノードID、当該ノードの位置情報(経度及び緯度や、地図データにおける座標(X,Y))、当該ノードに接続されるリンクのリンクID等の情報を有している。
【0028】
更に、各ノードには、1のリンクに対応する道路からそのノードに対応する接続部分を介して他のリンクに対応する道路への車両の移動(直進、右左折等)の困難さをあらわす重みづけとしてのノードコストが設定される。
【0029】
当該接続部分を介した車両の移動の困難さは、(i)当該移動の方向(例えば、直進方向、右折方向、左折方向等)、(ii)その接続部分を介した移動を規制する規制要素(例えば、信号、標識(例えば、一時停止)、有料道路の料金所、交通規制人、建物等の障害物)の有無、(iii)その接続部分への道路の接続数(例えば、三叉、四叉、五叉等)、(iv)その接続部分の道路の接続形状(例えば、T字路、十字路等)、(v)その接続部分に接続される道路のうち少なくとも何れか一つの道路の属性(例えば、交差点を右左折する前の走行道路の幅員又は車線数、交差点を右左折した後の走行道路の幅員又は車線数、交差点を右左折する前に対向する(前方の)道路(走行道路でない道路)の幅員又は車線数、交差点を直進する前の走行道路の幅員又は車線数、交差点を直進した後の走行道路の幅員又は車線数、交差点を直進する際に横断する道路(走行道路でない道路)の幅員又は車線数、更には、交差点を右左折する前の走行道路の右左折レーンの有無、交差点を移動する前又は後の走行道路の一方通行又は双方通行の別等)、(vi)その接続部分に接続される道路のうち少なくとも何れか一つの道路の状況(例えば、交差点を右左折する前の走行道路の交通状況(例えば、渋滞の有無)、交差点を右左折した後の走行道路の交通状況、交差点を右左折する前に対向する道路の交通状況、交差点を直進する前の走行道路の交通状況、交差点を直進した後の走行道路の交通状況、交差点を直進する際に横断する道路の交通状況等)等によって異なるものであり、更には、上記(i)〜(vi)のうちの何れか2つ以上の組合せによっても異なるものである(例えば、接続部分が十字路であっても、信号の有無や道路の属性によって当該移動の困難さが異なる)。
【0030】
このような点が考慮され、各ノードには、そのノードに応じたノードコストが設定されることになる。一例を挙げると、幅員が広い道路から交差点を介して狭い道路へ車両が右折する場合には、曲がりにくいので、ノードコストが大きく設定される。また、その場合、当該交差点に信号が無い場合には、更に曲がりにくいので、更にノードコストが大きく設定される。更に、その場合、右折後の道路が渋滞している場合には、更に曲がりにくいので、更にノードコストが大きく設定される。
【0031】
経路案内データには、後述する経路案内に用いられる画像データ、文字データ、及び音声データ等が含まれる。
【0032】
なお、経路探索や経路案内(経路誘導)を行うためのデータ及びプログラムは、情報記憶部4に記録する代わりに、例えば、インターネット及び移動体通信網(無線基地局を含む)等を含む通信ネットワークに接続された所定のサーバに記憶保存しておき、適宜、当該サーバから送信され、システム制御部8へ出力されるように構成しても良い。
【0033】
表示部5は、例えば、描画処理部、バッファメモリ及びディスプレイ(例えば、液晶ディスプレイ、又は有機ELディスプレイ等)等を備えており、描画処理部が、システム制御部8の制御の下、地図画像データや、経路案内に係る画像データをバッファメモリに展開、描画した後、ディスプレイにおける表示画面に表示(例えば、地図表示、経路表示、経路の距離や料金等の一覧表示等)するようになっている。また、当該ディスプレイには、システム制御部8の制御の下、ユーザに対し入力指示や選択指示を促すための例えばメニューも表示される。
【0034】
音声出力部6は、例えば、DAC(デジタル/アナログ信号変換器)、アンプ、スピーカ等を備えており、システム制御部8から出力された経路案内に係る音声データをDACによりD/A変換した後、アンプにより増幅してスピーカから音波として出力するようになっている。
【0035】
操作部7は、ユーザからの入力指示や選択指示(例えば、目的地の指示)等を受け付けるための複数の操作ボタンを有しており、ユーザにより押下された操作ボタンに対応する指示信号をシステム制御部8へ出力するようになっている。
【0036】
システム制御部8は、演算機能を有するCPU、作業用RAM、各種データやプログラムを記憶するROM等を備えており、当該ナビゲーション装置Sにおける構成要素全体を統括制御するようになっている。そして、システム制御部8のCPUが、例えば情報記憶部4に記憶された経路探索や経路案内等を行うためのプログラム(本願の経路探索処理プログラムを含む)を読み出し実行することにより、現在位置算出部8aと、リンクコスト算出手段としてのリンクコスト算出部8bと、リンク学習度設定手段としてのリンク学習度設定部8cと、判別手段、取得手段、及びノードコスト算出手段としてのノードコスト算出部8dと、ノード学習度設定手段としてのノード学習度設定部8eと、経路探索手段としての経路探索部8fと、提示手段としての経路案内部8gとして、それぞれ機能するようになっている。
【0037】
現在位置算出部8aは、センサ部2から出力された速度データ、方位データ、加速度データ、走行距離データ等を受け付け、これらのデータに基づいて、車両の現在位置情報(経度及び緯度や、地図データにおける座標(X,Y))を算出する。また、現在位置検出部8aは、GPS受信部1からのGPSデータに基づいて、適宜、上記算出した車両の現在位置情報を補正する。なお、車両の現在位置情報の算出方法は、公知の技術であるので、更なる詳しい説明を省略する。
【0038】
リンクコスト算出部8bは、例えば第1地点としての現在地から第2地点としての目的地に至る経路候補を構成する複数のリンクのそれぞれのリンクコストを取得して設定し、これらのリンクコストに基づいて各経路候補の総リンクコストを計算する。各リンクに設定されるリンクコストは、例えば、予め設定された複数のリンクコストのうちから、当該リンクに対応する道路の距離、属性、交通状況等に応じた(見合った)リンクコストが取得されるか、或いは、当該リンクに対応する道路の距離、属性、交通状況等のパラメータを用いて計算されて取得される。
【0039】
リンク学習度設定部8cは、車両がリンクに対応する道路を通る(走行する)頻度に応じて当該リンクの学習度を設定する。当該リンクの学習度は、例えば、車両がリンクに対応する道路を通る(走行する)回数に比例して(つまり、当該回数が多くなれば、リンクの学習度が大きくなる)設定される値である。
【0040】
そして、リンクコスト算出部8bは、上記リンクに設定されたリンクコスト及び当該リンクに設定されたリンクの学習度を用いて、当該リンクにおける新たなリンクコストを算出する。新たなリンクコストが算出された場合、リンクコスト算出部8bは、これらの新たなリンクコストに基づいて各経路候補の総リンクコストを計算することになる。なお、新たなリンクコストは、例えば、当該リンクの学習度が大きくなるにつれて、小さくなっていく。つまり、当該リンクに対応する道路を通る頻度が高くなるに従い、リンクコストは小さくなっていくことになる。
【0041】
ノードコスト算出部8dは、上記少なくとも2つ以上のリンクを接続する複数のノードにおけるそれぞれのノードコストを取得して設定し、これらのノードコストに基づいて各経路候補の総ノードコストを計算する。
【0042】
各ノードに設定されるノードコストは、例えば、予め設定された複数のノードコストのうちから、(i)接続部分を介した車両の移動の方向、(ii)接続部分を介した移動を規制する規制要素の有無、(iii)接続部分への道路の接続数、(iv)接続部分の道路の接続形状、(v)接続部分に接続される道路のうち少なくとも何れか一つの道路の属性、(vi)接続部分に接続される道路のうち少なくとも何れか一つの道路の状況のうちの一つ又は何れか2つ以上の組合せに応じた(見合った)ノードコストが取得されるか、或いは、上記(i)乃至(vi)の要素を考慮したパラメータを用いて計算されて取得される。
【0043】
そのため、ノードコスト算出部8dは、各ノードについて、そのノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する際における、当該接続部分を介した車両の移動の方向の判別と、当該移動を規制する規制要素の有無の判別と、当該ノードへのリンクの接続数の判別と、当該ノードに対応する接続部分へのリンクに対応する道路の接続形状の判別と、当該ノードに接続されるリンクのうち少なくとも何れか一つのリンクに対応する道路の属性の判別と、当該道路の状況の判別と、の少なくとも何れか一つの判別を行う。
【0044】
ノード学習度設定部8eは、ノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する頻度に応じて当該ノードの学習度を設定する。当該ノードの学習度は、例えば、車両がノードに対応する接続部分を通る回数に比例して(つまり、当該回数が多くなれば、ノードの学習度が大きくなる)設定される値である。
【0045】
そして、ノードコスト算出部8dは、上記ノードに設定されたノードコスト及び当該ノードに設定されたノードの学習度を用いて、当該ノードにおける新たなノードコストを算出する。新たなノードコストが算出された場合、ノードコスト算出部8dは、これらの新たなノードコストに基づいて各経路候補の総ノードコストを計算することになる。なお、新たなノードコストは、例えば、当該ノードの学習度が大きくなるにつれて、小さくなっていく。つまり、当該ノードに対応する接続部分を通る頻度が高くなるに従い、ノードコストは小さくなっていくことになる。
【0046】
経路探索部8fは、上記リンクコスト及び上記ノードコストに基づいて上記経路候補のうちから最適経路を探索する。例えば、リンクコスト算出部8bにより算出された総リンクコストと、ノードコスト算出部8dにより算出された総ノードコストとの和である総コストを、各経路候補毎に算出して、そのうち、総コストが小さい(例えば、最小の)経路候補を最適経路として探索する。なお、最適経路は、一つだけでなく、複数探索されても良い。
【0047】
経路案内部8gは、現在位置算出部8aにより算出された車両の現在位置を認識しつつ、当該現在位置が道路上に位置するか否かの整合性、いわゆるマップマッチング処理を行い、かつ、経路探索部8fにより探索された最適経路を用いて、当該経路に関する情報(最適経路の経路(ルート)案内(誘導)、最適経路の距離や料金等)をユーザに提示、すなわち、当該情報を表示部5に表示させたり、音声出力部6から音声出力させたりする。
【0048】
次に、図3乃至図5等を参照して、本実施形態における車載用ナビゲーション装置Sの動作を説明する。
【0049】
図3は、システム制御部8における経路探索処理の一例を示すフローチャートであり、図4は、図3のステップS3におけるリンクコスト算出処理の一例を示すフローチャートであり、図5は、図3のステップS7におけるノードコスト算出処理の一例を示すフローチャートである。
【0050】
(経路探索処理)
始めに、図3を用いて、経路探索処理のメインルーチンの一例について説明する。
【0051】
先ず、ユーザが、例えば操作部7を操作して車載用ナビゲーション装置Sを起動させると、表示部5におけるディスプレイ上にメニュー画面が表示される。このようなメニュー画面において、ユーザが操作部7を操作して所望の目的地を入力して経路探索指示を行うと、図3に示す経路探索処理が開始される。
【0052】
図3の処理において、先ず、システム制御部8(経路探索部8f)は、情報記憶部4から経路探索を行うための地図データ、リンクデータ、及びノードデータ等を読み出し、現在位置算出部8aにて算出された車両の現在地点の位置、及び、ユーザにより入力された目的地点の位置を認識する(ステップS1)。
【0053】
次いで、システム制御部8(経路探索部8f)は、現在地点に接続される全てのリンクを抽出し(ステップS2)、リンクテーブルに登録(例えば、リンクIDを登録)する。
【0054】
次いで、システム制御部8(リンクコスト算出部8b)は、リンクテーブルに登録されたリンクのリンクコスト算出処理を実行する(ステップS3)。なお、当該リンクコスト算出処理の詳細については図4に示すが後述する。
【0055】
次いで、システム制御部8(経路探索部8f)は、上記リンクテーブルに登録された全てのリンクのリンクコストの算出が終了したか否かを判別し(ステップS4)、終了していない場合には(ステップS4:N)、上記ステップS3に戻る。一方、上記登録された全てのリンクのリンクコストの算出が終了した場合には(ステップS4:Y)、ステップS5に移行される。
【0056】
ステップS5においては、システム制御部8(経路探索部8f)は、目的地点に到達したか否かを判別し、目的地点に到達していない場合には(ステップS5:N)、ステップS6に移行し、目的地点に到達した場合には(ステップS5:Y)、ステップS10に移行する。
【0057】
ステップS6においては、システム制御部8(経路探索部8f)は、上記リンクテーブルに登録されたリンクに接続される全てのノードを抽出し、ノードテーブルに登録(例えば、ノードIDを登録)する。
【0058】
次いで、システム制御部8(ノードコスト算出部8d)は、ノードテーブルに登録されたノードのノードコスト算出処理を実行する(ステップS7)。なお、当該ノードコスト算出処理の詳細については図5に示すが後述する。
【0059】
次いで、システム制御部8(経路探索部8f)は、上記ノードテーブルに登録された全てのノードのノードコストの算出が終了したか否かを判別し(ステップS8)、終了していない場合には(ステップS8:N)、上記ステップS7に戻る。一方、上記登録された全てのノードのノードコストの算出が終了した場合には(ステップS8:Y)、ステップS9に移行される。
【0060】
ステップS9においては、システム制御部8(経路探索部8f)は、ノードテーブルに登録される全てのノードに接続される全てのリンクを抽出し(ステップS9)、リンクテーブルに新たに登録して、ステップS3に戻る。そして、システム制御部8(リンクコスト算出部8b)は、ステップS3にて、上記と同様、新たに登録された全てのリンクのリンクコストを算出することになる(ステップS4)。そして、ステップS5にて未だ目的地に到達していないと判別された場合には(ステップS5:N)、それらの新たに追加されたリンクに接続される全てのノードが抽出され(ステップS6)、新たにノードテーブルに登録され、それらのノードのノードコストが算出される(ステップS7)。
【0061】
このように、目的地点に到達されるまで、リンクコスト及びノードコストの計算が行われる。そして、ステップS3で算出されたリンクコストは、各経路候補毎に積算され、総リンクコストとしてシステム制御部8(経路探索部8f)により取得される。そして、ステップS7で算出されたノードコストもまた、各経路候補毎に積算され、総ノードコストとしてシステム制御部8(経路探索部8f)により取得される。つまり、現在地点から目的地点までの経路候補が複数あるとすると、それらの経路候補毎に、総リンクコスト及び総ノードコストが算出されることになる。
【0062】
そして、ステップS10においては、システム制御部8(経路探索部8f)は、各経路候補毎に、上記算出された総リンクコストと総ノードコストの和である総コストを算出し(ステップS10)、そのうち、総コストが小さい(例えば、最小の)経路候補を最適経路として探索(ステップS11)して決定する。
【0063】
こうして、最適経路が探索されると、システム制御部8(経路案内部8g)は、経路案内処理を実行、すなわち、現在位置算出部8aにより算出された車両の現在位置を認識しつつ、探索された最適経路を用いて、当該経路に関する情報(最適経路の経路(ルート)案内(誘導)、最適経路の距離や料金等)をユーザに提示、すなわち、当該情報を表示部5に表示させたり、音声出力部6から音声出力させたりする。
【0064】
なお、上記処理においては、総リンクコストと、総ノードコストとは別々に積算されて算出される例を示したが、例えば、経路候補毎に、リンクコスト及びノードコストが算出される度に総コストに積算していくように構成しても良い(この場合、ステップS10の処理は不要となる)。
【0065】
(リンクコスト算出処理)
次に、図4を用いて、経路探索処理のサブルーチン、すなわちリンクコスト算出処理の一例について説明する。
【0066】
図4の処理において、先ず、システム制御部8(リンクコスト算出部8b)は、上記リンクテーブルに登録されたリンクのうちの1つリンクを選定し、当該選定されたリンクに対応する道路の距離、属性、交通状況等を、リンクデータや交通情報受信部3からの道路交通情報に基づき判別し(ステップS31)、その判別結果に基づいて、例えば、予め設定された複数のリンクコストのうちから、判別された道路の距離、属性、交通状況等の組合せに応じたリンクコストを取得(例えば、RAMの特定のアドレスに記憶)し(ステップS32)、当該リンクコストを当該リンク(リンクID)に対して設定する。なお、当該リンクコストは、その都度、上記判別された道路の距離、属性、交通状況等のパラメータが所定の計算式に代入され計算の上、取得されるように構成しても良い。また、リンクコストの算出において、上述パラメータ以外にも例えば平均旅行時間(リンクに対応する道路を通過するのにかかる平均時間)や車両の平均速度、道路の制限速度のパラメータを用いても良い。
【0067】
次いで、システム制御部8(リンクコスト算出部8b)は、上記選定されたリンクの学習度が設定されているか否かを判別し(ステップS33)、設定されている場合には(ステップS33:Y)、上記取得し、設定したリンクコスト、及び当該リンクの学習度(リンク学習度設定部8cから取得)を用いて当該リンクにおける新たなリンクコストを算出する(ステップS34)。一方、リンクの学習度が設定されていない場合には(ステップS33:N)、ステップS35に移行される。
【0068】
この新たなリンクコストは、例えば、下記(1)式により算出される。
LC=(100−K1×S)×LC0/100・・・(1)
【0069】
ここで、“LC”は、新たなリンクコストを示し、“LC0”は、基のリンクコスト(上記設定されたリンクコスト)を示す。また、“S”は、リンクの学習度を示しており、例えば当該リンクに対応する道路を通った回数となる。また、“K1”は、新たなリンクコストLCと基のリンクコストLC0との間の変化の割合を規定する定数又は関数である。
【0070】
次いで、システム制御部8(リンクコスト算出部8b)は、最終的に取得又は算出されたリンクコストを、これに対応する経路候補(つまり、当該リンクに対応する道路を通る経路候補)の総リンクコストに加算してこれを新たな総リンクコストとして記憶(更新)し(ステップS35)、図3に示すに処理に戻る(ステップS4に移行する)。このように、リンクコストが算出される度に、これに対応する経路候補の総リンクコストに積算されていくことになる。
【0071】
なお、上記ステップS33及びS34におけるリンクの学習度を考慮したリンクコストの算出処理は、学習機能ロック等により実行されなくすることも可能であり、この場合、ステップS35では、上記設定されたリンクコストを、これに対応する経路候補の総リンクコストに加算してこれを新たな総リンクコストとして記憶(更新)することになる。
【0072】
(ノードコスト算出処理)
次に、図5等を用いて、経路探索処理のサブルーチン、すなわちノードコスト算出処理の一例について説明する。なお、以下の説明において、T字路、十字路、五差路等の交差点を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する場合における「1のリンク」を「進入リンク」と称し、「他のリンク」を「退出リンク」と称するものとする。また、十字路を介して進入リンクに対応する道路から退出リンクに対応する道路を直進する場合において、進入リンク及び退出リンクに対応する道路と直交する道路(つまり、進入リンク及び退出リンク以外のリンクに対応する道路であって、車両が横断する道路)に対応するリンクを交差リンクと称するものとする。また、十字路を介して進入リンクに対応する道路から退出リンクに対応する道路に右左折する場合において、当該十字路を右左折する前に対向する(前方の)道路を対向リンクと称するものとする。
【0073】
図5の処理において、先ず、システム制御部8(ノードコスト算出部8d)は、上記ノードテーブルに登録されたノードのうちの1つノードを選定し、当該選定されたノードに対応する接続部分を介して進入リンクに対応する道路から退出リンクに対応する道路へ車両が移動する際における、当該移動の方向を判別し(ステップS71)、その結果を記憶する。かかる方向の判別においては、例えば、進入リンク及び退出リンクに対応する道路の方位より、進入リンクと退出リンクとの成す角度が算出され、当該角度が、予め設定された右折の角度範囲に含まれる場合には、右折方向と判別され、予め設定された左折の角度範囲に含まれる場合には、左折方向と判別され、予め設定された直進の角度範囲に含まれる場合には、直進方向と判別される。なお、右折又は左折の角度範囲を複数段階に設定し、同じ右折又は左折であっても、車両が曲がる角度に応じて区別しても良い。
【0074】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードに対応する接続部分を介した移動を規制する規制要素(例えば、信号)の有無を判別する(ステップS72)し、その結果を記憶する。かかる規制要素の有無は、地図データにより判別することができる。
【0075】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードに対応する接続部分への道路の接続形状(例えば、T字路、十字路)を判別し(ステップS73)、その結果を記憶する。かかる接続形状は、当該ノードに接続される進入リンクとそれ以外のリンクとのなす角度に基づき判別することができる。
【0076】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードに対応する接続部分に接続される道路のうち、例えば進入リンク及び退出リンクに対応する道路の属性(例えば、幅員が広い(例えば、10m以上)、幅員が普通(例えば、5m以上10m未満、幅員が狭い(例えば、5m未満))を判別し(ステップS74)、その結果を記憶する。なお、上述したように、進入リンク及び退出リンクに対応する道路の幅員の代わりに当該道路の車線数を判別するように構成しても良い。
【0077】
そして、システム制御部8(ノードコスト算出部8d)は、上記ステップS71乃至S74における判別結果に基づいて、予め設定された複数のノードコスト(例えば、図6に示すようなノードコストテーブルに登録されたノードコスト)のうちから、判別された道路の接続形状、道路の属性、規制要素の有無、及び移動の方向の組合せに応じたノードコストを取得(例えば、RAMの特定のアドレスに記憶)する(ステップS75)。なお、当該ノードコストは、その都度、上記判別された道路の接続形状、道路の属性、規制要素の有無、及び移動の方向等のパラメータが所定の計算式に代入され計算の上、取得されるように構成しても良い。また、上記ステップS71乃至S74のうち、全ての判別処理を行わなくとも良く、少なくとも何れか一つの判別処理であっても良い。
【0078】
図6は、道路の接続形状、道路の属性、規制要素の有無、及び移動の方向の組合せに応じて予め設定された複数のノードコストが登録されたノードコストテーブルの一例を示す図である。このようなノードコストテーブルは、例えば、経路探索を行うためのデータと同様、CD−ROM、DVD−ROM、又はHD等に予め記録される。
【0079】
図6に示すように、ノードコストは、道路の接続形状(例えば、T字路、十字路)、道路の属性(例えば、道路の幅員)、規制要素(例えば、信号)の有無、及び移動の方向(例えば、左折、右折、直進)の組合せによって異なっている。
【0080】
図6に示すようなノードコストは、一定の基本原則(経験則が含まれる)が考慮されて決定される。この基本原則として、例えば、ノードに対応する接続部分が信号のある十字路であり、進入リンクに対応する道路の幅員が広い場合、青信号の時間が長く左折の信号待ち時間が短くなるため車両の左折の困難さが低くなるが、交通量も多く右折の信号待ち時間が長くなるため右折の困難さが高くなる。また、この場合に、例えば、退出リンクに対応する道路の幅員が狭い場合、右折レーンがなかったり、右折専用の信号が無かったりするため車両の右折の困難さが更に高くなる。
【0081】
また、例えば、ノードに対応する接続部分が信号のある十字路であり、進入リンクに対応する道路の幅員が狭く、退出リンクに対応する道路の幅員が広い場合、右左折の信号待ち時間が長くなるため車両の右左折の困難さが高くなり、また、当該十字路に信号がない場合、右折の困難さが更に高くなる。
【0082】
また、例えば、ノードに対応する接続部分が信号のある十字路であり、交差リンクに対応する道路の幅員が広く退出リンクに対応する道路の幅員が狭い場合、直進の信号待ち時間が長くなるので、車両の直進(横断)の困難さが高くなり、その逆の場合、直進の信号待ち時間が短くなるので、直進の困難さが低くなる。また、例えば、ノードに対応する接続部分が信号のない十字路であり、交差リンクに対応する道路の幅員が広く退出リンクに対応する道路の幅員が狭い場合(これらの道路の幅員の差が大きいほど)、車両の直進(横断)の困難さが極めて高くなる。
【0083】
また、例えば、ノードに対応する接続部分が信号のあるT字路である場合、右折と左折の困難さは変わらない(この場合と、信号のある十字路と比較すると、右折の困難さはT字路の方が低くなる。)。また、この場合に、退出リンクに対応する道路の幅員が広い場合、右左折の信号待ち時間が長くなるため右左折の困難さが高くなり、また、当該T字路に信号がない場合、右折の困難さが極めて高くなる。
【0084】
以上、基本原則の一例を挙げたが、この他にも様々な要因が考慮されてノードコストが決定されることになる。また、このような基本原則は、国毎に異なる場合もあるので、その国の交通規則等に応じて決められる。例えば、英国では、日本と同様、車両が左側通行であるので、上記基本原則が適用できるが、ドイツやフランスでは、車両が右側通行であるので、上記基本原則において右折の困難さと左折の場合の困難さが反転されることになる。また、例えば米国のように、赤信号であっても右折が可能である交通規則であれば、右折と左折の困難さの差を更に大きく設定しても良い。
【0085】
なお、図6に示すノードコストテーブルにおいては、上記移動の方向として3種類の方向(左折方向、右折方向、直進方向)を例にとったが、これに限定されるものではなく、車両が曲がる角度に応じて4種類以上の方向に分け、ノードコストを区別しても良い。また、上記規制要素として信号を例にとったが、その他にも、例えば、標識(例えば、一時停止)、有料道路の料金所、交通規制人、建物等の障害物等の要素を組み込んでノードコストを区別しても良い。また、上記道路の属性として3種類の幅員(広い、普通、狭い)を例にとったが、4種類以上の幅員に分け、ノードコストを区別しても良く、また、道路の車線数を組み込んでノードコストを区別しても良い。また、上記道路の接続形状として、2種類の形状(T字路、十字路)を例にとったが、3種類以上の形状(例えば、Y字路、五差路等含める)に分け、ノードコストを区別しても良い。このようにノードコストを区別してノードコストテーブルに登録した場合、それに応じて上記ステップS71乃至S74における判別処理における判別の内容も追加、変更されるように構成される(例えば、標識(例えば、一時停止)、有料道路の料金所等の有無の判別)。
【0086】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードへのリンクの接続数が5つ以上であり、かつ、上記規制要素(例えば、信号)が有であるか否かを判別し(ステップS76)、この条件を満たす場合には(ステップS76:Y)、ステップS75にて取得したノードコストに基づいて、リンクの接続数に応じた新たなノードコストを算出(例えば、リンクの接続数を“n”、基のノードコストを“NC0”、新たなノードコストを“NC”とすると、NC=(n−3)×NC0の式にて算出)して取得する(ステップS77)。これは、五差路、六差路・・・と、リンクに対応する道路の接続数が増えていくと、信号の待ち時間が増え移動の困難さが増していくので、その分、ノードコストを増やす趣旨である。
【0087】
次いで、システム制御部8(ノードコスト算出部8d)は、交通情報受信部3から道路の道路交通情報を取得し、例えば、上記選定されたノードへの接続される退出リンクに対応する道路の交通状況の判別、例えば渋滞が有るか否かを判別し(ステップS78)、渋滞が有る場合には(ステップS78:Y)、ステップS77にて取得したノードコストに当該渋滞を考慮したコストを加算し、新たなノードコストを取得する(ステップS79)。これは、進入リンクに対応する道路側に渋滞情報がなくても(渋滞情報は、全ての道路について提供されるわけではなく、渋滞情報が有り実際渋滞している道路に接続している道路は、渋滞情報が提供されていなくても、渋滞していることが多いのでこれを考慮する)、渋滞している道路(つまり、退出リンクに対応する道路)に右左折で入る場合、入ることのできる車両の台数が限られるので、入る前の道路(つまり、進入リンクに対応する道路)も渋滞していることが多いため車両の右左折の困難さが増すので、その分、ノードコストを増やす趣旨である。また、渋滞している道路から右折する場合、右折の信号待ち時間が余計に長くなる(例えば、複数回の青が切り替わる)ため車両の右折の困難さが増すので、その分、ノードコストを増やす趣旨である。また、有料道路のインターチェンジにおけるノードコストであれば、その先の有料道路(つまり、退出リンクの道路)の渋滞状況に応じてノードコストを増やす趣旨である。
【0088】
こうして、上記ステップS79にて取得されたノードコストが、当該ノード(ノードID)に対して設定されることになる。
【0089】
なお、上記ステップ78においては、退出リンクに対応する道路の交通状況(渋滞)の判別を行うように構成したが、これに限定されるものではなく、例えば、対向リンクに対応する道路の交通状況(渋滞)の判別を行うように構成しても良い。つまり、対向リンクに対応する道路が渋滞である場合には、車両が右折の困難性が増すので、その分、ノードコストを増やす趣旨である。
【0090】
また、上記退出リンクに対応する道路の交通状況(渋滞)の判別を、上記ステップS71乃至S74において行うように構成し、ノードコストテーブルに道路の交通状況(渋滞)を組み込んでノードコストを区別するように構成しても良い。
【0091】
次いで、システム制御部8(ノードコスト算出部8d)は、上記選定されたノードの学習度が設定されているか否かを判別し(ステップS80)、設定されている場合には(ステップS80:Y)、上記ステップS79にて取得し、設定したノードコスト及び当該ノードの学習度(ノード学習度設定部8eから取得)を用いて当該ノードにおける新たなノードコストを算出する(ステップS81)。これは、ノードに対応する接続部分を介して進入リンクに対応する道路から退出リンクに対応する道路へ車両が同じように移動する場合であっても、その移動する頻度(例えば、回数)が大きくなっていけば、慣れにより車両が移動の困難性が減っていくので、その分、ノードコストを減らす趣旨である。一方、ノードの学習度が設定されていない場合には(ステップS80:N)、ステップS82に移行される。
【0092】
この新たなノードコストは、例えば、下記(2)式により算出される。
NC=(100−K2(S1+S2)/2)×NC0/100・・・(2)
【0093】
ここで、“NC”は、新たなノードコストを示し、“NC0”は、基のノードコスト(上記ステップS79にて取得されたノードコスト)を示す。また、“(S1+S2)/2”は、ノードの学習度を示しており、進入リンクの学習度S1(例えば、進入リンクに対応する道路を通った回数)と、退出リンクの学習度S2(例えば、退出リンクに対応する道路を通った回数)との和を“2”で除した値となる。これにより、上述した各リンクに設定されるリンクの学習度を利用することができる。なお、ノードの学習度を進入リンクの学習度S1と退出リンクの学習度S2から求めるのではなく、ノード学習度設定部8eが、当該ノードに対応する接続部分を車両が通る回数をカウントしてそれをノードの学習度として設定するように構成しても良い。
【0094】
ところで、同じリンクに対応する道路、かつ同じノードに対応する交差点を通る場合であっても、例えば、図7に示すパターン1とパターン2のように、その移動の方向によって、車両の移動の困難さは異なるものである。すなわち、パターン1の場合は車両が交差点を右折するのに対し、パターン2の場合は車両が交差点を左折することになるので、上記ステップS75にて取得されるノードコストは区別されることになる。
【0095】
しかし、上記(2)式で示されるノードの学習度((S1+S2)/2)は、パターン1の場合とパターン2の場合とで区別されない。つまり、ノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する場合と、当該ノードに対応する接続部分を介して上記他のリンクに対応する道路から上記1のリンクに対応する道路へ車両が移動する場合とで区別されない。そこで、パターン1の場合におけるノードの学習度を“S12”とし、パターン2の場合におけるノードの学習度を“S21”として、ノード学習度設定部8eが、例えば、当該ノードに対応する接続部分を車両が通る回数をS12とS21とで別々にカウントし、パターン1の場合とパターン2の場合とを区別してノードの学習度を設定するように構成すればより望ましい。
【0096】
このように、パターン1の場合とパターン2の場合とを区別してノードの学習度を設定した場合、パターン1の場合における新たなノードコストは、下記(3)式で算出され、パターン2の場合における新たなノードコストは、下記(4)式で算出されることになり、パターン1の場合とパターン2の場合とでノードコストが区別されることになる。
NC=(100−K2×S12)×NC0/100・・・(3)
NC=(100−K2×S21)×NC0/100・・・(4)
【0097】
また、上記(2)乃至(4)式における“K2”は、新たなノードコストNCと基のノードコストNC0との間の変化の割合(比率)を規定する定数又は関数であり、上述した新たなリンクコストLCと基のリンクコストLC0との間の変化の割合K1(上記(1)式)と同一とすることが望ましい。これにより、車両がある経路を走行した場合に、リンクコスト及びノードコストは、その走行頻度に応じて同様の割合(比率)で減少するので、本願の課題にて述べた不都合を回避することができる。すなわち、本願の課題で述べた経路Aと経路Bとを車両が同一の頻度で走行した場合に、経路Aの総コストが、例えば、“700”(総リンクコストが“500”、総ノードコストが“200”)となり、経路Bの総コストが、例えば、“800”(総リンクコストが“750”、総ノードコストが“50”)となり、学習前と比べて総コストが逆転することなく、最適経路となるべき経路Aが正常に最適経路として選ばれることになる。なお、「経路Aと経路Bとを車両が同一の頻度で走行した場合に、学習前と比べて総コストが逆転することなく、最適経路となるべき経路Aが正常に最適経路として選ばれる」ことを満足すれば、上記(2)乃至(4)式における“K2”は、上記(1)式における“K1”と必ずしも同一である必要はなく、同程度であれば良い(K1とK2とに一定差があってもよい)。
【0098】
システム制御部8(ノードコスト算出部8d)は、最終的に取得又は算出されたノードコストを、これに対応する経路候補(つまり、当該ノードに対応する接続部分を通る経路候補)の総ノードコストに加算してこれを新たな総ノードコストとして記憶(更新)し(ステップS82)、図3に示すに処理に戻る(ステップS8に移行する)。このように、ノードコストが算出される度に、これに対応する経路候補の総ノードコストに積算されていくことになる。
【0099】
なお、上記ステップS80及びS81におけるノードの学習度を考慮したノードコストの算出処理は、学習機能ロック等により実行されなくすることも可能であり、この場合、ステップS82では、ステップS79にて取得され、設定されたノードコストを、これに対応する経路候補の総ノードコストに加算してこれを新たな総ノードコストとして記憶(更新)することになる。
【0100】
以上説明したように、上記実施形態によれば、各ノードについて、そのノードに対応する接続部分を介して1のリンクに対応する道路から他のリンクに対応する道路へ車両が移動する際における、当該接続部分を介した車両の移動の方向の判別と、当該移動を規制する規制要素の有無の判別と、当該ノードへのリンクの接続数の判別と、当該ノードに対応する接続部分へのリンクに対応する道路の接続形状の判別と、当該ノードに接続されるリンクのうち少なくとも何れか一つのリンクに対応する道路の属性の判別と、当該道路の状況の判別と、の少なくとも何れか一つの判別を行い、これらの一つ又は何れか2つ以上の組合せに応じた(見合った)ノードコストを取得して、当該ノードコスト及び上記リンクコストに基づいて最適経路を探索するように構成したので、より経路の総コストの精度を向上させ、より最適な経路を精度良く探索することができ、ユーザが、真に、車両で走行しやすい経路の算出が可能となる。
【0101】
また、リンクコストばかりでなく、ノードコストに対しても学習の概念を適用し、車両の走行頻度に応じて、リンクコストとノードコストが同程度の割合で変化するように構成したので、走行頻度が同程度の経路同士においては、学習前と比べて総コストが逆転するという不都合を回避でき、正確に(精度良く)最適経路を探索することができる。
【0102】
なお、上記実施形態においては、ノードに対応する接続部分を介した車両の移動の方向、当該接続部分を介した移動を規制する規制要素の有無等を判別して、判別結果に応じたノードコストを取得するように構成したが、例えば、規制要素(例えば、信号)の待ち時間情報や変化サイクル情報等を予め経路探索を行うためのデータに含めて記録しておき、かかる規制要素が有りと判別されたノードについては、かかる規制要素(例えば、信号)の待ち時間や変化サイクルを更に判別して、これらに応じたノードコストを取得するように構成しても良い。また、経路探索処理を実行する時刻、又は経路案内処理を開始する時刻による交通量や信号の変化サイクルの変化を考慮して、ノードコストを動的に設定するように構成しても良い。
【0103】
(他の実施例1)
上記実施形態においては、車両に搭載された車両ナビゲーション装置Sに対して本願の経路探索装置及び方法等を適用した場合の例を示したが、これに限定されるものではなく、いわゆる通信ナビゲーションシステムに対して本願の経路探索装置及び方法等を適用するように構成しても良い。
【0104】
図8は、通信ナビゲーションシステムの概要構成例を示す図である。図8に示すように、通信ナビゲーションシステムSXは、車両に搭載される通信ナビゲーション端末10と、当該通信ナビゲーション端末10がアンテナ10a及び移動体通信ネットワーク(無線基地局等を含む)12を介して接続される通信センタ装置(固定設置されるサーバ装置)11と、を含んで構成される。
【0105】
通信ナビゲーション端末10は、上述した車載用ナビゲーション装置SにおけるGPS(Global Positioning System)受信部1、センサ部2、交通情報受信部3、表示部5、音声出力部6、操作部7、及び移動体通信ネットワーク12を介して通信センタ装置11と通信を行うための通信部等を備え、更に、これらを統括制御し、かつ通信センタ装置11との情報の送受信を制御する端末制御部(図示せず)を備えている。
【0106】
一方、通信センタ装置11は、移動体通信ネットワーク12を介して通信ナビゲーション端末10と通信を行うための通信部、上述した車載用ナビゲーション装置Sにおける情報記憶部4に記憶(記録)された経路探索や経路案内(経路誘導)等を行うためのデータ及びプログラム等を記憶する記憶部、及び車載用ナビゲーション装置Sにおけるシステム制御部8とほぼ同様の機能を有したシステム制御部(例えば、現在位置算出部8a、リンクコスト算出部8b、リンク学習度設定部8c、ノードコスト算出部8d、ノード学習度設定部8e、経路探索部8f、及び経路案内部8gを有する)等を備えている。
【0107】
このような構成において、通信センタ装置11は、通信ナビゲーション端末10からの移動体通信ネットワーク12を介した要求に応じて、適宜、必要最小限の地図データ等を通信ナビゲーション端末10に送信(提供)し、また、上述した図3乃至図5に示すような経路探索処理を実行、及び経路案内処理(経路案内部8gが、経路探索部8fにより探索された最適経路を用いて、通信ナビゲーション端末10を通じて経路に関する情報をユーザに提示する)を実行する。
【0108】
このような通信ナビゲーションシステムSXにおいても、上述した車載用ナビゲーション装置Sと同様の効果を奏することができる。
【0109】
(他の実施例2)
上記実施形態においては、車両を移動体の例とし、本願を車載用ナビゲーション装置Sや通信ナビゲーションシステムSXに対して適用した場合の例を示したが、これに限定されるものではなく、以下に示すように、様々なものに対して本願を適用することが可能であり、上記実施形態と同様の効果を奏することができる。
【0110】
例えば、移動体の例として歩行者(動物に適用しても良い)若しくは自転車等とし、歩行者若しくは自転車を運転する者が有する(或いは、自転車に設置される)携帯端末(例えば、携帯電話機、PDA(Personal Digital Assistant)、PHS(Personal Handyphone System)、又はノート型PC(Personal Computer))に対して本願を適用しても良く
、この場合、リンクに対応する「路」としては、例えば歩行者道路(歩道)も含まれることになり、「路の状況」としては、例えば歩道の混雑状況も含まれることになる。
【0111】
また、例えば、移動体の例として船舶又は航空機とし、船舶又は航空機に搭載されたナビゲーション装置に対して本願を適用しても良く、この場合、リンクに対応する「路」としては、例えば航路が相当し、ノードに対応する「接続部分」としては、例えば港又は飛行場が相当することになる。
【0112】
更に、例えば、移動体の例として電車の利用者とし、電車の利用者の携帯端末に対して本願を適用しても良く、この場合、リンクに対応する「路」としては、例えば路線(例えば、山手線等)が相当し、ノードに対応する「接続部分」としては、例えば「乗り換えのある駅」が相当し、「路の状況」としては、例えば電車内の混雑状況が相当することになる。また、この場合、電車の利用者の携帯端末若しくはこれに移動体通信網を介して接続されるサーバ装置には地図データとして電車の路線地図データが記憶され、更に電車の運行時刻等の情報も記憶されることになる。
【0113】
この場合、電車の利用者の携帯端末は、少なくとも2つのリンクが接続されるノードに対応する「乗り換えのある駅」を介して1のリンクに対応する「路線」から他のリンクに対応する「路線」へ「電車の利用者」が移動(乗り換える)する際における、当該移動を規制する規制要素(例えば、階段や改札)の有無の判別と、当該ノードへのリンクの接続数の判別と、当該ノードに対応する接続部分へのリンクに対応する「路線」の接続形状の判別と、当該ノードに接続されるリンクのうち少なくとも何れか一つのリンクに対応する「路線」の属性(例えば、運行間隔)の判別と、当該「路線」の状況(例えば、混雑状況)の判別と、の少なくとも何れか一つの判別を行う(乗り換えに要する時間を判別対象に加えても良い)。
【0114】
そして、電車の利用者の携帯端末は、当該判別結果に基づいて、前記規制要素の有無、前記リンクの接続数、前記リンクに対応する路の接続形状、前記路の属性、及び前記路の状況のうちの一つ又は何れか2つ以上の組合せに応じたノードコストを取得し、リンクコスト(上記実施形態と同様、路線の距離、属性等により決まる)及び前記取得されたノードコストに基づいて、第1地点(例えば、東京駅)から第2地点(例えば、渋谷駅)に至る経路候補のうちから最適経路を探索する(その他、リンク及びノードの学習度の設定、及びこれに基づく新たなリンクコスト及びノードコストの算出も勿論適用される)。なお、この場合も、上記図6に示すような、路線の接続形状、路線の属性、及び規制要素の有無等の組合せに応じて予め設定された複数のノードコストが登録されたノードコストテーブルが用意される。
【0115】
なお、本願は、上記実施例に限られるものではなく、その要旨を逸脱しない範囲でその他様々なものに対して適用可能である。
【0116】
また、本発明は、上記実施形態に限定されるものではない。上記実施形態は、例示であり、本発明の特許請求の範囲に記載された技術的思想と実質的に同一な構成を有し、同様な作用効果を奏するものは、いかなるものであっても本発明の技術的範囲に包含される。
【図面の簡単な説明】
【0117】
【図1】本実施形態に係る車載用ナビゲーション装置の概要構成例を示す図である。
【図2】ランナバウトと呼ばれる接続部分の一例を示す図である。
【図3】システム制御部8における経路探索処理の一例を示すフローチャートである。
【図4】図3のステップS3におけるリンクコスト算出処理の一例を示すフローチャートである。
【図5】図3のステップS7におけるノードコスト算出処理の一例を示すフローチャートである。
【図6】道路の接続形状、道路の属性、規制要素の有無、及び移動の方向の組合せに応じて予め設定された複数のノードコストが登録されたノードコストテーブルの一例を示す図である。
【図7】同じリンクに対応する道路、かつ同じノードに対応する交差点を通る場合であって、その移動の方向が異なる2つのパターンの一例を示す概念図である。
【図8】通信ナビゲーションシステムの概要構成例を示す図である。
【符号の説明】
【0118】
1 受信部
2 センサ部
3 交通情報受信部
4 情報記憶部
5 表示部
6 音声出力部
7 操作部
8 システム制御部
8a 現在位置算出部
8b リンクコスト算出部
8c リンク学習度設定部
8d ノードコスト算出部
8e ノード学習度設定部
8f 経路探索部
8g 経路案内部
10 通信ナビゲーション端末
11 通信センタ装置
12 移動体通信ネットワーク
S 車載用ナビゲーション装置
SX 通信ナビゲーションシステム
【特許請求の範囲】
【請求項1】
第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索装置において、
少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段と、
前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段と、
前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段と、
を備えることを特徴とする経路探索装置。
【請求項2】
請求項1に記載の経路探索装置において、
前記判別手段は、前記接続部分を右折又は左折して前記1のリンクに対応する路から前記他のリンクに対応する路へ前記移動体が移動する際における、当該接続部分を右折又は左折する前に対向する路の交通状況を判別し、
前記取得手段は、前記対向する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得することを特徴とする経路探索装置。
【請求項3】
請求項1に記載の経路探索装置において、
前記判別手段は、前記接続部分を直進して前記1のリンクに対応する路から前記他のリンクに対応する路へ前記移動体が移動する際における、当該接続部分を直進する際に横断する路の交通状況を判別し、
前記取得手段は、前記横断する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得することを特徴とする記載の経路探索装置。
【請求項4】
第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索方法において、
少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う工程と、
前記判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する工程と、
前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する工程と、
を備えることを特徴とする経路探索方法。
【請求項5】
第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索するコンピュータを、
少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段、
前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段、及び
前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段として機能させることを特徴とする経路探索処理プログラム。
【請求項6】
請求項5に記載の経路探索処理プログラムがコンピュータ読み取り可能に記録されていることを特徴とする記録媒体。
【請求項1】
第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索装置において、
少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段と、
前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段と、
前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段と、
を備えることを特徴とする経路探索装置。
【請求項2】
請求項1に記載の経路探索装置において、
前記判別手段は、前記接続部分を右折又は左折して前記1のリンクに対応する路から前記他のリンクに対応する路へ前記移動体が移動する際における、当該接続部分を右折又は左折する前に対向する路の交通状況を判別し、
前記取得手段は、前記対向する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得することを特徴とする経路探索装置。
【請求項3】
請求項1に記載の経路探索装置において、
前記判別手段は、前記接続部分を直進して前記1のリンクに対応する路から前記他のリンクに対応する路へ前記移動体が移動する際における、当該接続部分を直進する際に横断する路の交通状況を判別し、
前記取得手段は、前記横断する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得することを特徴とする記載の経路探索装置。
【請求項4】
第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索する経路探索方法において、
少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う工程と、
前記判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する工程と、
前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する工程と、
を備えることを特徴とする経路探索方法。
【請求項5】
第1地点から第2地点に至る経路候補を構成する複数のリンク毎に設定されたリンクコストに基づいて、前記経路候補のうちから最適経路を探索するコンピュータを、
少なくとも3つのリンクが接続されるノードに対応する接続部分を介して1のリンクに対応する路から他のリンクに対応する路へ移動体が移動する際における、当該1のリンク及び当該他のリンク以外に当該ノードに接続するリンク(以下、「第三リンク」という)に対応する路の交通状況の判別を行う判別手段、
前記判別手段によって判別された前記第三リンクに対応する路の交通状況に基づいて、前記1のリンクに対応する路から前記他のリンクに対応する路への移動の困難さをあらわすノードコストを取得する取得手段、及び
前記リンクコスト及び前記取得されたノードコストに基づいて前記最適経路を探索する経路探索手段として機能させることを特徴とする経路探索処理プログラム。
【請求項6】
請求項5に記載の経路探索処理プログラムがコンピュータ読み取り可能に記録されていることを特徴とする記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−80127(P2009−80127A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2008−291083(P2008−291083)
【出願日】平成20年11月13日(2008.11.13)
【分割の表示】特願2006−512955(P2006−512955)の分割
【原出願日】平成17年4月25日(2005.4.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成20年11月13日(2008.11.13)
【分割の表示】特願2006−512955(P2006−512955)の分割
【原出願日】平成17年4月25日(2005.4.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]