
経路探索装置、経路探索方法、経路探索プログラム、および記録媒体
【課題】緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止すること。
【解決手段】経路探索装置100は、移動体に搭載され、目的地までの推奨経路を探索する。経路探索装置100は、格納部101と、受信部102と、設定部103と、探索部104と、出力部105とを備える。格納部101は、緊急車両が出動する所定の施設の位置情報を予め格納する。受信部102は、事故発生地点の情報を受信する。設定部103は、事故発生地点の情報と格納部101に格納されている所定の施設の位置情報とを用いて、緊急車両の走行が予測される、所定の施設と事故発生地点とを含むエリア(以下「予測エリア」という)を設定する。探索部104は、予測エリアを回避した目的地までの推奨経路を探索する。
【解決手段】経路探索装置100は、移動体に搭載され、目的地までの推奨経路を探索する。経路探索装置100は、格納部101と、受信部102と、設定部103と、探索部104と、出力部105とを備える。格納部101は、緊急車両が出動する所定の施設の位置情報を予め格納する。受信部102は、事故発生地点の情報を受信する。設定部103は、事故発生地点の情報と格納部101に格納されている所定の施設の位置情報とを用いて、緊急車両の走行が予測される、所定の施設と事故発生地点とを含むエリア(以下「予測エリア」という)を設定する。探索部104は、予測エリアを回避した目的地までの推奨経路を探索する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、経路探索装置、経路探索方法、経路探索プログラム、および記録媒体に関する。
【背景技術】
【0002】
近年、車両などの移動体には、目的地までの経路を探索する経路探索装置が搭載されている。このような経路探索装置としては、事故情報や交通渋滞などの交通情報を加味して、逐次、推奨経路の探索をおこなうものが知られている。たとえば、交通情報が走行経路に関係する情報である場合に、当該交通情報を用いて、事故発生地点や渋滞地点を迂回するようにした技術が提案されている(たとえば、下記特許文献1参照。)。
【0003】
また、事故発生時に、緊急車両が通行することにより、渋滞が発生したり緊急車両の通行を妨げたりすることを抑制させるために、たとえば、緊急車両端末から送信される緊急車両の走行軌跡の情報を用いて、緊急車両が走行するエリアを特定するとともに、当該エリアを回避するようにした技術が提案されている(たとえば、下記特許文献2参照。)。
【0004】
【特許文献1】特開2000−39332号公報
【特許文献2】特開2005−321356号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に記載の技術は、緊急車両に遭遇した場合には当該緊急車両の通行を妨げたり、渋滞を発生させたりするおそれがあるといった問題が一例として挙げられる。また、上述した特許文献2の技術は、走行軌跡の情報を送信する機能を緊急車両端末に設けたり、当該情報を受信する機能を自車両端末に設けたりしなければならず、緊急車両との遭遇の回避を簡単に実現することができないといった問題が一例として挙げられる。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる経路探索装置は、移動体に搭載され、目的地までの推奨経路を探索する経路探索装置であって、緊急車両が出動する所定の施設の位置情報を予め格納する格納手段と、事故発生地点の情報を受信する受信手段と、前記事故発生地点の情報と前記格納手段に格納されている前記所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定手段と、前記予測エリアを回避した目的地までの推奨経路を探索する探索手段と、を備えることを特徴とする。
【0007】
また、請求項6に記載の経路探索方法は、移動体に搭載され、目的地までの推奨経路を探索する経路探索装置の経路探索方法であって、事故発生地点の情報を受信する受信工程と、前記事故発生地点の情報と予め格納手段に格納されている緊急車両が出動する所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定工程と、前記予測エリアを回避した目的地までの推奨経路を探索する探索工程と、を含むことを特徴とする。
【0008】
また、請求項7に記載の経路探索プログラムは、請求項6に記載の経路探索方法をコンピュータに実行させることを特徴とする。
【0009】
また、請求項8に記載の記録媒体は、請求項7に記載の経路探索プログラムをコンピュータに読み取り可能に記録したことを特徴とする。
【発明を実施するための最良の形態】
【0010】
以下に添付図面を参照して、この発明にかかる経路探索装置、経路探索方法、経路探索プログラム、および記録媒体の好適な実施の形態を詳細に説明する。
【0011】
(実施の形態)
(経路探索装置の機能的構成)
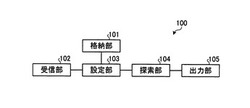
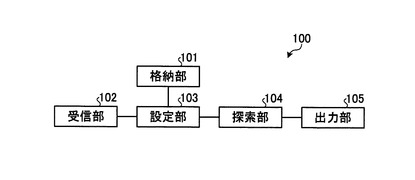
この発明の実施の形態にかかる経路探索装置の機能的構成について説明する。図1は、本実施の形態にかかる経路探索装置の機能的構成の一例を示すブロック図である。経路探索装置100は、移動体に搭載され、目的地までの推奨経路を探索するものである。
【0012】
図1において、経路探索装置100は、格納部101と、受信部102と、設定部103と、探索部104と、出力部105とを備えて構成される。格納部101は、緊急車両が出動する所定の施設の位置情報を予め格納する。緊急車両は、緊急用のサイレンを備えた車両であり、代表的には、消防車、救急車、パトロールカーなどが挙げられる。所定の施設は、代表的には、消防署、警察署などである。すなわち、格納部101は、具体的には、消防署や警察署などの位置情報を予め格納する。
【0013】
受信部102は、事故発生地点の情報を受信する。事故発生地点の情報は、事故発生地点の位置情報、事故発生時刻の情報、事故発生地点における道路の車線数や幅員の情報、事故の規模を示す情報、事故発生地点の交通量の情報などである。受信部102は、たとえば、管理する管理サーバから道路情報を受信したり、ラジオやテレビなどの公共の電波を用いて道路情報を受信したりする。
【0014】
設定部103は、事故発生地点の情報と格納部101に格納されている所定の施設の位置情報とを用いて、緊急車両の走行が予測される、所定の施設と事故発生地点とを含むエリア(以下「予測エリア」という)を設定する。予測エリアは、少なくとも、所定の施設周辺の領域および事故発生地点周辺の領域を含む領域であればよいが、緊急車両が走行すると予測される所定の施設から事故発生地点までの経路(以下、「予測経路」という)そのものや、当該予測経路周辺のエリアであることが望ましい。
【0015】
探索部104は、予測経路や、予測経路を含む予測エリアを回避した目的地までの推奨経路を探索する。探索部104は、たとえば、ダイクストラ法を用いて、推奨経路を探索する。具体的には、探索部104は、予測経路を含む予測エリアのリンクに所定のリンクコストを乗じたり、当該リンクを通行禁止としたりすることにより、経路計算をおこなう。
【0016】
また、探索部104は、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が移動体の現在位置から所定範囲内に存在する場合に、予測エリアを回避した推奨経路を探索するようにしてもよい。所定時間とは、たとえば、20分といった時間である。また、所定範囲内とは、たとえば、現在位置から事故発生地点までの距離が10kmといった所定距離の範囲としてもよいし、現在位置から事故発生地点へ到達するまでの時間が15分といった所定時間の範囲としてもよい。
【0017】
また、探索部104は、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が誘導経路上またはその周辺に存在する場合に、予測エリアを回避した推奨経路を探索するようにしてもよい。誘導経路は、予め目的地が設定されることによって探索された誘導中の経路である。
【0018】
出力部105は、探索部104によって探索された推奨経路の情報を出力する。推奨経路の情報は、経路誘導用の情報として用いられたり、スピーカから音声出力されたり、ディスプレイから表示出力されたりする。
【0019】
(経路探索装置の経路探索処理手順)
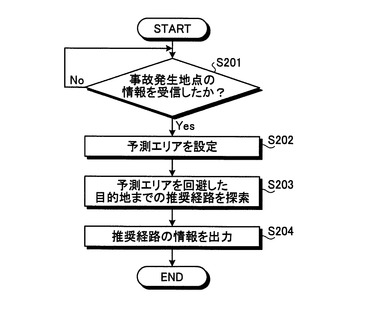
つぎに、図2を用いて、経路探索装置100の経路探索処理手順について説明する。図2は、本実施の形態にかかる経路探索装置100の経路探索処理手順の一例を示すフローチャートである。
【0020】
図2のフローチャートにおいて、経路探索装置100は、受信部102が事故発生地点の情報を受信したか否かを判断する(ステップS201)。受信部102が事故発生地点の情報を受信するまで待機状態にあり(ステップS201:Noのループ)、事故発生地点の情報を受信すると(ステップS201:Yes)、設定部103が事故発生地点の情報と格納部101に格納されている所定の施設の位置情報とを用いて、予測エリアを設定する(ステップS202)。
【0021】
そして、探索部104が予測エリアを回避した目的地までの推奨経路を探索する(ステップS203)。このあと、出力部105が推奨経路の情報を出力し(ステップS204)、一連の処理を終了する。
【0022】
以上説明したように、本実施の形態にかかる経路探索装置100によれば、事故が発生した場合に、予測エリアを設定し、当該予測エリアを回避した推奨経路を探索するようにしたので、緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止することができる。また、所定の施設の位置情報と、事故発生地点の情報のみで、緊急車両の走行する予測エリアを回避した推奨経路を提示することができるので、特殊な情報や特殊な情報を受信するための装置などを用いることなく、簡単に、緊急車両の走行の妨げや渋滞の発生を抑止することができる。
【0023】
また、緊急車両の走行が予測される予測経路を設定し、当該予測経路周辺のエリアを予測エリアとして設定するようにすれば、予測エリアの範囲を小さく設定することができ、的確な推奨経路を探索することができる。したがって、緊急車両との遭遇を抑制させることができる。
【0024】
また、予測エリアとして、緊急車両の走行が予測される予測経路を設定し、当該予測経路を回避した推奨経路を探索するようにすれば、予測エリアの範囲をより小さく設定することができ、推奨経路が元々の誘導経路から極端に離れるようなことがなく、誘導経路に近い推奨経路を提示することができる。すなわち、推奨経路の誘導経路に対する変更を最小限に抑え、予測エリアを回避した上で、目的地までの最短または最速の推奨経路を提示することができる。
【0025】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が移動体の現在位置から所定範囲内に存在する場合に、推奨経路を探索するようにすれば、緊急車両との遭遇や渋滞の発生の可能性が高い場合に、推奨経路を提示することができ、不必要な誘導経路の変更を抑えることができる。
【0026】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が誘導経路上またはその周辺に存在する場合に、推奨経路を探索するようにすれば、誘導経路の変更を必要最小限に抑えることができる。
【0027】
なお、探索部104は、事故発生地点における道路の車線数や上り線、下り線などの道路情報などを加味した上で、推奨経路を探索するようにしてもよい。具体的には、たとえば、車線数が片側2車線以上であり、推奨経路(たとえば下り線)とは異なる上り線にて事故が発生し、緊急車両が上り線から事故発生地点に到達する経路を走行するものと予測される場合に、探索部104が推奨経路の探索をおこなわないようにすることも可能である。
【0028】
すなわち、緊急車両の走行を妨げるおそれや、渋滞の発生するおそれが少ない場合には、推奨経路の探索をおこなわないようにすることも可能である。なお、この場合、受信部102によって受信される事故発生地点の情報には、上り線または下り線のいずれに事故が発生したかを示す情報や、道路の車線数を示す情報などを含めればよい。このような構成とすることにより、誘導経路の変更を必要最小限に止め、目的地まで最短または最速の誘導経路を案内することが可能になる。
【0029】
また、探索部104は、事故の規模などの情報を加味した上で、推奨経路を探索するようにしてもよい。事故の規模は、たとえば、大小で表され、救護車がいる場合や、事故に関わる車両台数が所定台数以上の場合に、大とする。具体的には、たとえば、事故の規模が大の場合に、推奨経路を探索するようにし、事故の規模が小の場合に推奨経路を探索しないようにしてもよい。また、探索部104は、事故の規模に加え、交通量を加味した上で推奨経路を探索するようにしてもよい。
【0030】
具体的には、たとえば、事故の規模が小さく、かつ、交通量が少ない場合に、すなわち、緊急車両の走行を妨げるおそれや、渋滞の発生するおそれが少ない場合に、推奨経路を探索しないようにし、それ以外の場合に、推奨経路を探索する。なお、この場合、受信部102によって受信される事故発生地点の情報には、事故の規模を示す情報や、交通量の情報を含めればよい。このような構成とすることにより、誘導経路の変更を必要最小限に止め、目的地まで最短または最速の誘導経路を案内することが可能になる。
【実施例】
【0031】
以下に、本発明の実施例について説明する。本実施例では、車両に搭載されるナビゲーション装置によって、本発明の経路探索装置100を実施した場合の一例について説明する。
【0032】
(ナビゲーション装置のハードウェア構成)
図3を用いて、本実施例にかかるナビゲーション装置のハードウェア構成について説明する。図3は、本実施例にかかるナビゲーション装置のハードウェア構成の一例を示すブロック図である。
【0033】
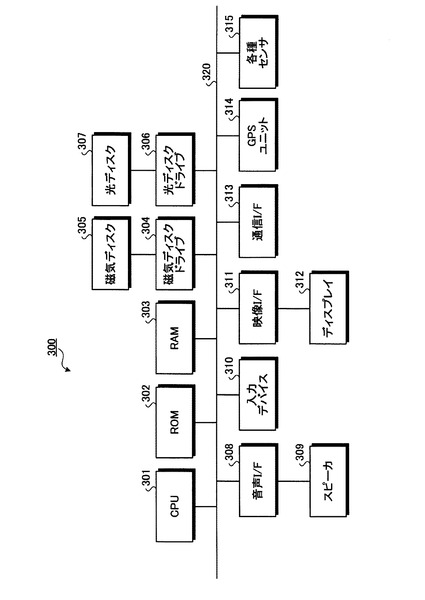
図3において、ナビゲーション装置300は、CPU301と、ROM302と、RAM303と、磁気ディスクドライブ304と、磁気ディスク305と、光ディスクドライブ306と、光ディスク307と、音声I/F(インターフェース)308と、スピーカ309と、入力デバイス310と、映像I/F311と、ディスプレイ312と、通信I/F313と、GPSユニット314と、各種センサ315とを備えている。また、各構成部301〜315はバス320によってそれぞれ接続されている。
【0034】
CPU301は、ナビゲーション装置300の全体の制御を司る。ROM302は、ブートプログラム、現在位置算出プログラム、経路探索プログラム、経路誘導プログラムなどの各種プログラムを記録している。また、RAM303は、CPU301のワークエリアとして使用される。
【0035】
現在位置算出プログラムは、たとえば、後述するGPSユニット314および各種センサ315の出力情報に基づいて、車両の現在位置(ナビゲーション装置300の現在位置)を算出させる。
【0036】
経路探索プログラムは、後述する磁気ディスク305に記録されている地図データなどを利用して、出発地から目的地までの最適な経路(推奨経路)を探索させる。ここで、推奨経路とは、目的地までの最短(または最速)経路やユーザが指定した条件に最も合致する経路などである。また、目的地のみならず、立ち寄り地点や休憩地点までの経路を探索してもよい。
【0037】
また、経路探索プログラムは、通信I/F313を介して受信した事故発生地点の情報と、磁気ディスク305に記録されている消防署などの所定の施設の情報を用いて、緊急車両の走行が予測される予測エリアを設定し、当該予測エリアを回避した目的地までの推奨経路を探索させる。なお、予測エリアは、緊急車両の走行が予測される所定の施設から事故発生地点までの予測経路や、当該経路周辺のエリアである。
【0038】
さらに、経路探索プログラムは、現在時刻が事故の発生から所定時間内であり、事故発生地点が現在位置から所定範囲内であり、さらに、事故発生地点が誘導経路上またはその周辺に存在する場合に、推奨経路を探索させる。探索された推奨経路は、CPU301を介して音声I/F308や映像I/F311へ出力される。なお、図1に示した、実施の形態にかかる設定部103および探索部104は、CPU301によって実現される。すなわち、CPU301が経路探索プログラムを実行することにより、設定部103および探索部104の機能を実現する。
【0039】
経路誘導プログラムは、経路探索プログラムを実行することによって探索された経路情報、現在位置算出プログラムを実行することによって算出された車両の現在位置情報、磁気ディスク305から読み出された地図データに基づいて、リアルタイムな経路誘導情報を生成させる。生成された経路誘導情報は、CPU301を介して音声I/F308や映像I/F311へ出力される。
【0040】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0041】
磁気ディスク305は、所定の施設、および当該所定の施設の位置情報を記録する。所定の施設は、消防署や警察署など緊急車両が出動する施設である。なお、図1に示した、実施の形態にかかる格納部101は、磁気ディスク305によって実現される。
【0042】
光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータの読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。また、この着脱自在な記録媒体として、光ディスク307のほか、MO、メモリカードなどであってもよい。
【0043】
音声I/F308は、音声出力用のスピーカ309に接続される。スピーカ309は、音声を出力する。入力デバイス310は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、マウス、タッチパネルなどが挙げられる。入力デバイス310は、リモコン、キーボード、マウス、タッチパネルのうち、いずれか一つの形態によって実現されてもよいし、複数の形態によって実現してもよい。
【0044】
映像I/F311は、ディスプレイ312に接続される。映像I/F311は、具体的には、たとえば、ディスプレイ312全体の制御をおこなうグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいて、ディスプレイ312を表示制御する制御ICなどによって構成される。
【0045】
ディスプレイ312は、たとえば、CRT、TFT液晶ディスプレイ、プラズマディスプレイなどを採用することができる。ディスプレイ312は、たとえば、車両のダッシュボード付近に設置される。ディスプレイ312は、車両のダッシュボード付近のほか、車両の後部座席周辺などに設置するなどして、車両内に複数設置してもよい。なお、図1に示した、実施の形態にかかる出力部105は、ディスプレイ312やスピーカ309によって実現される。
【0046】
通信I/F313は、無線を介してネットワークに接続され、ナビゲーション装置300とCPU301とのインターフェースとして機能する。通信I/F313は、外部のサーバなどから事故発生地点の情報を受信する。図1に示した、実施の形態にかかる受信部102は、通信I/F313によって実現される。
【0047】
GPSユニット314は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット314の出力情報は、後述する各種センサ315の出力値とともに、CPU301による車両の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば緯度・経度、高度などの、地図データ上の1点を特定する情報である。
【0048】
各種センサ315は、車速センサ、加速度センサ、角速度センサなどの、車両の位置や挙動を判断することが可能な情報を出力する。各種センサ315の出力値は、CPU301による車両の現在位置の算出や、速度や方位の変化量の測定などに用いられる。
【0049】
図1に示した経路探索装置100が備える格納部101と、受信部102と、設定部103と、探索部104と、出力部105とは、図3に示したナビゲーション装置300におけるROM302、RAM303、磁気ディスク305、光ディスク307などに記録されたプログラムやデータを用いて、CPU301が所定のプログラムを実行し、ナビゲーション装置300における各部を制御することによってその機能を実現する。
【0050】
すなわち、本実施例のナビゲーション装置300は、ナビゲーション装置300における記録媒体としてのROM302に記録されている各種プログラムを実行することにより、図1に示した経路探索装置100が備える機能を、図2に示した経路探索処理手順で実行することができる。
【0051】
(ナビゲーション装置による経路探索処理の一例)
つぎに、図4を用いて、ナビゲーション装置300による経路探索処理の一例について説明する。図4は、ナビゲーション装置300による経路探索処理の一例を示すフローチャートである。なお、図4のフローチャートにおいては、予め目的地が設定され、誘導経路の誘導がおこなわれていることを前提とする。
【0052】
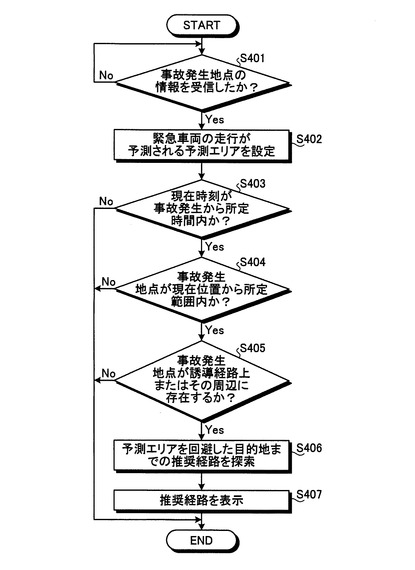
図4において、ナビゲーション装置300のCPU301は、通信I/F313により事故発生地点の情報を受信したか否かを判断する(ステップS401)。事故発生地点の情報を受信するまで待機状態にあり(ステップS401:Noのループ)、事故発生地点の情報を受信すると(ステップS401:Yes)、緊急車両の走行が予測される予測エリアを設定する(ステップS402)。なお、予測エリアは、緊急車両の走行が予測される予測経路、および予測経路を含むエリアである。
【0053】
現在時刻が事故発生から所定時間内か否かを判断する(ステップS403)。所定時間は、たとえば、20分といった時間である。現在時刻が事故発生から所定時間内であると判断した場合(ステップS403:Yes)、事故発生地点が現在位置から所定範囲内か否かを判断する(ステップS404)。所定範囲は、たとえば、10kmといった距離の範囲や、事故発生地点への所用時間が15分以内といった時間の範囲である。
【0054】
事故発生地点が現在位置から所定範囲内であると判断した場合(ステップS404:Yes)、事故発生地点が誘導経路上またはその周辺に存在するか否かを判断する(ステップS405)。なお、事故発生地点が誘導経路上またはその周辺に存在するか否かとは、換言すれば、予測エリア内に誘導経路が存在するか否かである。ステップS405において、事故発生地点が誘導経路上またはその周辺に存在すると判断した場合(ステップS405:Yes)、予測エリアを回避した目的地までの推奨経路を探索する(ステップS406)。このあと、ディスプレイ312を用いて、推奨経路を表示し(ステップS407)、一連の処理を終了する。
【0055】
一方、ステップS403において、現在時刻が事故発生から所定時間内ではないと判断した場合(ステップS403:No)、すなわち、事故発生から所定の時間が経過している場合、一連の処理を終了する。
【0056】
また、ステップS404において、事故発生地点が現在位置から所定範囲内にないと判断した場合(ステップS404:No)、すなわち、事故発生地点が現在位置から遠方に位置する場合、一連の処理を終了する。また、ステップS405において、事故発生地点が誘導経路上またはその周辺に存在しないと判断した場合(ステップS405:No)、一連の処理を終了する。
【0057】
(表示画面の一例)
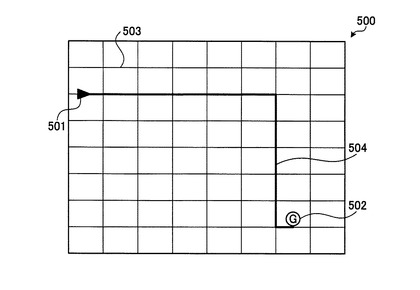
つぎに、図5および図6を用いて、表示画面の一例について説明する。図5は、誘導経路の誘導をおこなう際の表示画面の一例を示す説明図である。なお、図5に示す画面は、図4に示したフローチャートの前提として表示される画面であり、すなわち、誘導経路の周辺に事故が発生する前の画面を示したものである。また、この画面は、図3に示したディスプレイ312に表示される画面である。
【0058】
図5において、表示画面500は、車両の現在位置501と、目的地502と、格子状の道路503と、現在位置501から目的地502までを結ぶ誘導経路504とを表示している。ナビゲーション装置300は、このような表示画面500を表示し、誘導経路504の誘導をおこなっている。この誘導中に、誘導経路504上のある地点にて事故が発生したとすると、図6に示す表示画面に移行する。
【0059】
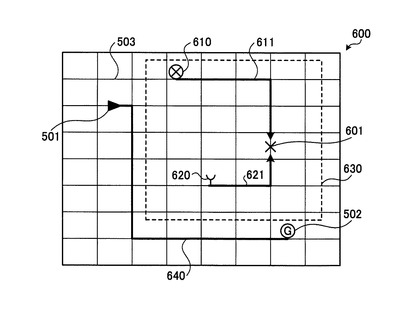
図6は、誘導経路504上のある地点にて事故が発生した際に表示される表示画面の一例を示す説明図である。また、図6に示す表示画面は、図4のステップS407において表示される画面を示している。図6において、表示画面600は、現在位置501と、目的地502と、道路503と、事故発生地点601と、警察署610と、消防署620と、予測経路611,621と、予測エリア630と、推奨経路640とを表示している。
【0060】
事故発生地点601は、図5に示した誘導経路504上に位置している。また、現在位置501と事故発生地点601との距離は所定範囲内にある。また、現在時刻は、事故発生後所定時間内にある。警察署610および消防署620は、上述した所定の施設に相当し、すなわち、緊急車両の出動が見込まれる施設である。
【0061】
予測経路611は、警察署610から事故発生地点601までを示した、パトロールカーの走行が予測される経路である。また、予測経路621は、消防署620から事故発生地点601までを示した、消防車や救急車の走行が予測される経路である。
【0062】
予測エリア630は、予測経路611,621周辺のエリアである。予測エリア630は、緊急車両が経路を変更することにより緊急車両との遭遇が予測されるエリアであるとともに、他の車両が事故発生地点601を迂回することにより混雑が予測されるエリアでもある。推奨経路640は、予測エリア630を回避した、目的地までの最短または最速の経路を示している。
【0063】
このような表示画面600により、利用者は、事故が発生したことにより、予測エリア630を回避した旨を知ることができる。なお、表示画面600に、予測エリア630を回避し、経路が変更した旨を表示させてもよい。また、事故が発生したことにより予測エリア630を回避した旨をスピーカ309から音声出力させてもよい。
【0064】
以上説明したように、本実施例にかかるナビゲーション装置300によれば、事故が発生した場合に、予測エリアを設定し、当該予測エリアを回避した推奨経路を探索するようにしたので、緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止することができる。また、所定の施設の位置情報と、事故発生地点の情報のみで、緊急車両の走行する予測エリアを回避した推奨経路を提示することができるので、特殊な情報や特殊な情報を受信するための装置などを用いることなく、簡単に、緊急車両の走行の妨げや渋滞の発生を抑止することができる。
【0065】
また、緊急車両の走行が予測される予測経路を設定し、当該予測経路周辺のエリアを予測エリアとして設定するようにしたので、予測エリアの範囲を小さく設定することができ、的確な推奨経路を探索することができる。したがって、緊急車両との遭遇を抑制させることができる。
【0066】
また、予測エリアとして、緊急車両の走行が予測される予測経路を設定し、当該予測経路を回避した推奨経路を探索するようにしたので、予測エリアの範囲をより小さく設定することができ、推奨経路が元々の誘導経路から極端に離れるようなことがなく、誘導経路に近い推奨経路を提示することができる。すなわち、推奨経路の誘導経路に対する変更を最小限に抑え、予測エリアを回避した上で、目的地までの最短または最速の推奨経路を提示することができる。
【0067】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が車両の現在位置から所定範囲内に存在する場合に、推奨経路を探索するようにしたので、緊急車両との遭遇や渋滞の発生の可能性が高い場合に、推奨経路を提示することができ、不必要な誘導経路の変更を抑えることができる。
【0068】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が誘導経路上またはその周辺に存在する場合に、推奨経路を探索するようにしたので、誘導経路の変更を必要最小限に抑えることができる。
【0069】
以上のように、本発明の経路探索装置、経路探索方法、経路探索プログラム、および記録媒体によれば、緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止することができる。
【0070】
なお、本実施例で説明した経路探索方法は、予め用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【図面の簡単な説明】
【0071】
【図1】本実施の形態にかかる経路探索装置の機能的構成の一例を示すブロック図である。
【図2】本実施の形態にかかる経路探索装置の経路探索処理手順の一例を示すフローチャートである。
【図3】本実施例にかかるナビゲーション装置のハードウェア構成の一例を示すブロック図である。
【図4】ナビゲーション装置による経路探索処理の一例を示すフローチャートである。
【図5】誘導経路の誘導をおこなう際の表示画面の一例を示す説明図である。
【図6】誘導経路上のある地点にて事故が発生した際に表示される表示画面の一例を示す説明図である。
【符号の説明】
【0072】
100 経路探索装置
101 格納部
102 受信部
103 設定部
104 探索部
105 出力部
300 ナビゲーション装置
【技術分野】
【0001】
この発明は、経路探索装置、経路探索方法、経路探索プログラム、および記録媒体に関する。
【背景技術】
【0002】
近年、車両などの移動体には、目的地までの経路を探索する経路探索装置が搭載されている。このような経路探索装置としては、事故情報や交通渋滞などの交通情報を加味して、逐次、推奨経路の探索をおこなうものが知られている。たとえば、交通情報が走行経路に関係する情報である場合に、当該交通情報を用いて、事故発生地点や渋滞地点を迂回するようにした技術が提案されている(たとえば、下記特許文献1参照。)。
【0003】
また、事故発生時に、緊急車両が通行することにより、渋滞が発生したり緊急車両の通行を妨げたりすることを抑制させるために、たとえば、緊急車両端末から送信される緊急車両の走行軌跡の情報を用いて、緊急車両が走行するエリアを特定するとともに、当該エリアを回避するようにした技術が提案されている(たとえば、下記特許文献2参照。)。
【0004】
【特許文献1】特開2000−39332号公報
【特許文献2】特開2005−321356号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に記載の技術は、緊急車両に遭遇した場合には当該緊急車両の通行を妨げたり、渋滞を発生させたりするおそれがあるといった問題が一例として挙げられる。また、上述した特許文献2の技術は、走行軌跡の情報を送信する機能を緊急車両端末に設けたり、当該情報を受信する機能を自車両端末に設けたりしなければならず、緊急車両との遭遇の回避を簡単に実現することができないといった問題が一例として挙げられる。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかる経路探索装置は、移動体に搭載され、目的地までの推奨経路を探索する経路探索装置であって、緊急車両が出動する所定の施設の位置情報を予め格納する格納手段と、事故発生地点の情報を受信する受信手段と、前記事故発生地点の情報と前記格納手段に格納されている前記所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定手段と、前記予測エリアを回避した目的地までの推奨経路を探索する探索手段と、を備えることを特徴とする。
【0007】
また、請求項6に記載の経路探索方法は、移動体に搭載され、目的地までの推奨経路を探索する経路探索装置の経路探索方法であって、事故発生地点の情報を受信する受信工程と、前記事故発生地点の情報と予め格納手段に格納されている緊急車両が出動する所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定工程と、前記予測エリアを回避した目的地までの推奨経路を探索する探索工程と、を含むことを特徴とする。
【0008】
また、請求項7に記載の経路探索プログラムは、請求項6に記載の経路探索方法をコンピュータに実行させることを特徴とする。
【0009】
また、請求項8に記載の記録媒体は、請求項7に記載の経路探索プログラムをコンピュータに読み取り可能に記録したことを特徴とする。
【発明を実施するための最良の形態】
【0010】
以下に添付図面を参照して、この発明にかかる経路探索装置、経路探索方法、経路探索プログラム、および記録媒体の好適な実施の形態を詳細に説明する。
【0011】
(実施の形態)
(経路探索装置の機能的構成)
この発明の実施の形態にかかる経路探索装置の機能的構成について説明する。図1は、本実施の形態にかかる経路探索装置の機能的構成の一例を示すブロック図である。経路探索装置100は、移動体に搭載され、目的地までの推奨経路を探索するものである。
【0012】
図1において、経路探索装置100は、格納部101と、受信部102と、設定部103と、探索部104と、出力部105とを備えて構成される。格納部101は、緊急車両が出動する所定の施設の位置情報を予め格納する。緊急車両は、緊急用のサイレンを備えた車両であり、代表的には、消防車、救急車、パトロールカーなどが挙げられる。所定の施設は、代表的には、消防署、警察署などである。すなわち、格納部101は、具体的には、消防署や警察署などの位置情報を予め格納する。
【0013】
受信部102は、事故発生地点の情報を受信する。事故発生地点の情報は、事故発生地点の位置情報、事故発生時刻の情報、事故発生地点における道路の車線数や幅員の情報、事故の規模を示す情報、事故発生地点の交通量の情報などである。受信部102は、たとえば、管理する管理サーバから道路情報を受信したり、ラジオやテレビなどの公共の電波を用いて道路情報を受信したりする。
【0014】
設定部103は、事故発生地点の情報と格納部101に格納されている所定の施設の位置情報とを用いて、緊急車両の走行が予測される、所定の施設と事故発生地点とを含むエリア(以下「予測エリア」という)を設定する。予測エリアは、少なくとも、所定の施設周辺の領域および事故発生地点周辺の領域を含む領域であればよいが、緊急車両が走行すると予測される所定の施設から事故発生地点までの経路(以下、「予測経路」という)そのものや、当該予測経路周辺のエリアであることが望ましい。
【0015】
探索部104は、予測経路や、予測経路を含む予測エリアを回避した目的地までの推奨経路を探索する。探索部104は、たとえば、ダイクストラ法を用いて、推奨経路を探索する。具体的には、探索部104は、予測経路を含む予測エリアのリンクに所定のリンクコストを乗じたり、当該リンクを通行禁止としたりすることにより、経路計算をおこなう。
【0016】
また、探索部104は、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が移動体の現在位置から所定範囲内に存在する場合に、予測エリアを回避した推奨経路を探索するようにしてもよい。所定時間とは、たとえば、20分といった時間である。また、所定範囲内とは、たとえば、現在位置から事故発生地点までの距離が10kmといった所定距離の範囲としてもよいし、現在位置から事故発生地点へ到達するまでの時間が15分といった所定時間の範囲としてもよい。
【0017】
また、探索部104は、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が誘導経路上またはその周辺に存在する場合に、予測エリアを回避した推奨経路を探索するようにしてもよい。誘導経路は、予め目的地が設定されることによって探索された誘導中の経路である。
【0018】
出力部105は、探索部104によって探索された推奨経路の情報を出力する。推奨経路の情報は、経路誘導用の情報として用いられたり、スピーカから音声出力されたり、ディスプレイから表示出力されたりする。
【0019】
(経路探索装置の経路探索処理手順)
つぎに、図2を用いて、経路探索装置100の経路探索処理手順について説明する。図2は、本実施の形態にかかる経路探索装置100の経路探索処理手順の一例を示すフローチャートである。
【0020】
図2のフローチャートにおいて、経路探索装置100は、受信部102が事故発生地点の情報を受信したか否かを判断する(ステップS201)。受信部102が事故発生地点の情報を受信するまで待機状態にあり(ステップS201:Noのループ)、事故発生地点の情報を受信すると(ステップS201:Yes)、設定部103が事故発生地点の情報と格納部101に格納されている所定の施設の位置情報とを用いて、予測エリアを設定する(ステップS202)。
【0021】
そして、探索部104が予測エリアを回避した目的地までの推奨経路を探索する(ステップS203)。このあと、出力部105が推奨経路の情報を出力し(ステップS204)、一連の処理を終了する。
【0022】
以上説明したように、本実施の形態にかかる経路探索装置100によれば、事故が発生した場合に、予測エリアを設定し、当該予測エリアを回避した推奨経路を探索するようにしたので、緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止することができる。また、所定の施設の位置情報と、事故発生地点の情報のみで、緊急車両の走行する予測エリアを回避した推奨経路を提示することができるので、特殊な情報や特殊な情報を受信するための装置などを用いることなく、簡単に、緊急車両の走行の妨げや渋滞の発生を抑止することができる。
【0023】
また、緊急車両の走行が予測される予測経路を設定し、当該予測経路周辺のエリアを予測エリアとして設定するようにすれば、予測エリアの範囲を小さく設定することができ、的確な推奨経路を探索することができる。したがって、緊急車両との遭遇を抑制させることができる。
【0024】
また、予測エリアとして、緊急車両の走行が予測される予測経路を設定し、当該予測経路を回避した推奨経路を探索するようにすれば、予測エリアの範囲をより小さく設定することができ、推奨経路が元々の誘導経路から極端に離れるようなことがなく、誘導経路に近い推奨経路を提示することができる。すなわち、推奨経路の誘導経路に対する変更を最小限に抑え、予測エリアを回避した上で、目的地までの最短または最速の推奨経路を提示することができる。
【0025】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が移動体の現在位置から所定範囲内に存在する場合に、推奨経路を探索するようにすれば、緊急車両との遭遇や渋滞の発生の可能性が高い場合に、推奨経路を提示することができ、不必要な誘導経路の変更を抑えることができる。
【0026】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が誘導経路上またはその周辺に存在する場合に、推奨経路を探索するようにすれば、誘導経路の変更を必要最小限に抑えることができる。
【0027】
なお、探索部104は、事故発生地点における道路の車線数や上り線、下り線などの道路情報などを加味した上で、推奨経路を探索するようにしてもよい。具体的には、たとえば、車線数が片側2車線以上であり、推奨経路(たとえば下り線)とは異なる上り線にて事故が発生し、緊急車両が上り線から事故発生地点に到達する経路を走行するものと予測される場合に、探索部104が推奨経路の探索をおこなわないようにすることも可能である。
【0028】
すなわち、緊急車両の走行を妨げるおそれや、渋滞の発生するおそれが少ない場合には、推奨経路の探索をおこなわないようにすることも可能である。なお、この場合、受信部102によって受信される事故発生地点の情報には、上り線または下り線のいずれに事故が発生したかを示す情報や、道路の車線数を示す情報などを含めればよい。このような構成とすることにより、誘導経路の変更を必要最小限に止め、目的地まで最短または最速の誘導経路を案内することが可能になる。
【0029】
また、探索部104は、事故の規模などの情報を加味した上で、推奨経路を探索するようにしてもよい。事故の規模は、たとえば、大小で表され、救護車がいる場合や、事故に関わる車両台数が所定台数以上の場合に、大とする。具体的には、たとえば、事故の規模が大の場合に、推奨経路を探索するようにし、事故の規模が小の場合に推奨経路を探索しないようにしてもよい。また、探索部104は、事故の規模に加え、交通量を加味した上で推奨経路を探索するようにしてもよい。
【0030】
具体的には、たとえば、事故の規模が小さく、かつ、交通量が少ない場合に、すなわち、緊急車両の走行を妨げるおそれや、渋滞の発生するおそれが少ない場合に、推奨経路を探索しないようにし、それ以外の場合に、推奨経路を探索する。なお、この場合、受信部102によって受信される事故発生地点の情報には、事故の規模を示す情報や、交通量の情報を含めればよい。このような構成とすることにより、誘導経路の変更を必要最小限に止め、目的地まで最短または最速の誘導経路を案内することが可能になる。
【実施例】
【0031】
以下に、本発明の実施例について説明する。本実施例では、車両に搭載されるナビゲーション装置によって、本発明の経路探索装置100を実施した場合の一例について説明する。
【0032】
(ナビゲーション装置のハードウェア構成)
図3を用いて、本実施例にかかるナビゲーション装置のハードウェア構成について説明する。図3は、本実施例にかかるナビゲーション装置のハードウェア構成の一例を示すブロック図である。
【0033】
図3において、ナビゲーション装置300は、CPU301と、ROM302と、RAM303と、磁気ディスクドライブ304と、磁気ディスク305と、光ディスクドライブ306と、光ディスク307と、音声I/F(インターフェース)308と、スピーカ309と、入力デバイス310と、映像I/F311と、ディスプレイ312と、通信I/F313と、GPSユニット314と、各種センサ315とを備えている。また、各構成部301〜315はバス320によってそれぞれ接続されている。
【0034】
CPU301は、ナビゲーション装置300の全体の制御を司る。ROM302は、ブートプログラム、現在位置算出プログラム、経路探索プログラム、経路誘導プログラムなどの各種プログラムを記録している。また、RAM303は、CPU301のワークエリアとして使用される。
【0035】
現在位置算出プログラムは、たとえば、後述するGPSユニット314および各種センサ315の出力情報に基づいて、車両の現在位置(ナビゲーション装置300の現在位置)を算出させる。
【0036】
経路探索プログラムは、後述する磁気ディスク305に記録されている地図データなどを利用して、出発地から目的地までの最適な経路(推奨経路)を探索させる。ここで、推奨経路とは、目的地までの最短(または最速)経路やユーザが指定した条件に最も合致する経路などである。また、目的地のみならず、立ち寄り地点や休憩地点までの経路を探索してもよい。
【0037】
また、経路探索プログラムは、通信I/F313を介して受信した事故発生地点の情報と、磁気ディスク305に記録されている消防署などの所定の施設の情報を用いて、緊急車両の走行が予測される予測エリアを設定し、当該予測エリアを回避した目的地までの推奨経路を探索させる。なお、予測エリアは、緊急車両の走行が予測される所定の施設から事故発生地点までの予測経路や、当該経路周辺のエリアである。
【0038】
さらに、経路探索プログラムは、現在時刻が事故の発生から所定時間内であり、事故発生地点が現在位置から所定範囲内であり、さらに、事故発生地点が誘導経路上またはその周辺に存在する場合に、推奨経路を探索させる。探索された推奨経路は、CPU301を介して音声I/F308や映像I/F311へ出力される。なお、図1に示した、実施の形態にかかる設定部103および探索部104は、CPU301によって実現される。すなわち、CPU301が経路探索プログラムを実行することにより、設定部103および探索部104の機能を実現する。
【0039】
経路誘導プログラムは、経路探索プログラムを実行することによって探索された経路情報、現在位置算出プログラムを実行することによって算出された車両の現在位置情報、磁気ディスク305から読み出された地図データに基づいて、リアルタイムな経路誘導情報を生成させる。生成された経路誘導情報は、CPU301を介して音声I/F308や映像I/F311へ出力される。
【0040】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0041】
磁気ディスク305は、所定の施設、および当該所定の施設の位置情報を記録する。所定の施設は、消防署や警察署など緊急車両が出動する施設である。なお、図1に示した、実施の形態にかかる格納部101は、磁気ディスク305によって実現される。
【0042】
光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータの読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。また、この着脱自在な記録媒体として、光ディスク307のほか、MO、メモリカードなどであってもよい。
【0043】
音声I/F308は、音声出力用のスピーカ309に接続される。スピーカ309は、音声を出力する。入力デバイス310は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、マウス、タッチパネルなどが挙げられる。入力デバイス310は、リモコン、キーボード、マウス、タッチパネルのうち、いずれか一つの形態によって実現されてもよいし、複数の形態によって実現してもよい。
【0044】
映像I/F311は、ディスプレイ312に接続される。映像I/F311は、具体的には、たとえば、ディスプレイ312全体の制御をおこなうグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいて、ディスプレイ312を表示制御する制御ICなどによって構成される。
【0045】
ディスプレイ312は、たとえば、CRT、TFT液晶ディスプレイ、プラズマディスプレイなどを採用することができる。ディスプレイ312は、たとえば、車両のダッシュボード付近に設置される。ディスプレイ312は、車両のダッシュボード付近のほか、車両の後部座席周辺などに設置するなどして、車両内に複数設置してもよい。なお、図1に示した、実施の形態にかかる出力部105は、ディスプレイ312やスピーカ309によって実現される。
【0046】
通信I/F313は、無線を介してネットワークに接続され、ナビゲーション装置300とCPU301とのインターフェースとして機能する。通信I/F313は、外部のサーバなどから事故発生地点の情報を受信する。図1に示した、実施の形態にかかる受信部102は、通信I/F313によって実現される。
【0047】
GPSユニット314は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット314の出力情報は、後述する各種センサ315の出力値とともに、CPU301による車両の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば緯度・経度、高度などの、地図データ上の1点を特定する情報である。
【0048】
各種センサ315は、車速センサ、加速度センサ、角速度センサなどの、車両の位置や挙動を判断することが可能な情報を出力する。各種センサ315の出力値は、CPU301による車両の現在位置の算出や、速度や方位の変化量の測定などに用いられる。
【0049】
図1に示した経路探索装置100が備える格納部101と、受信部102と、設定部103と、探索部104と、出力部105とは、図3に示したナビゲーション装置300におけるROM302、RAM303、磁気ディスク305、光ディスク307などに記録されたプログラムやデータを用いて、CPU301が所定のプログラムを実行し、ナビゲーション装置300における各部を制御することによってその機能を実現する。
【0050】
すなわち、本実施例のナビゲーション装置300は、ナビゲーション装置300における記録媒体としてのROM302に記録されている各種プログラムを実行することにより、図1に示した経路探索装置100が備える機能を、図2に示した経路探索処理手順で実行することができる。
【0051】
(ナビゲーション装置による経路探索処理の一例)
つぎに、図4を用いて、ナビゲーション装置300による経路探索処理の一例について説明する。図4は、ナビゲーション装置300による経路探索処理の一例を示すフローチャートである。なお、図4のフローチャートにおいては、予め目的地が設定され、誘導経路の誘導がおこなわれていることを前提とする。
【0052】
図4において、ナビゲーション装置300のCPU301は、通信I/F313により事故発生地点の情報を受信したか否かを判断する(ステップS401)。事故発生地点の情報を受信するまで待機状態にあり(ステップS401:Noのループ)、事故発生地点の情報を受信すると(ステップS401:Yes)、緊急車両の走行が予測される予測エリアを設定する(ステップS402)。なお、予測エリアは、緊急車両の走行が予測される予測経路、および予測経路を含むエリアである。
【0053】
現在時刻が事故発生から所定時間内か否かを判断する(ステップS403)。所定時間は、たとえば、20分といった時間である。現在時刻が事故発生から所定時間内であると判断した場合(ステップS403:Yes)、事故発生地点が現在位置から所定範囲内か否かを判断する(ステップS404)。所定範囲は、たとえば、10kmといった距離の範囲や、事故発生地点への所用時間が15分以内といった時間の範囲である。
【0054】
事故発生地点が現在位置から所定範囲内であると判断した場合(ステップS404:Yes)、事故発生地点が誘導経路上またはその周辺に存在するか否かを判断する(ステップS405)。なお、事故発生地点が誘導経路上またはその周辺に存在するか否かとは、換言すれば、予測エリア内に誘導経路が存在するか否かである。ステップS405において、事故発生地点が誘導経路上またはその周辺に存在すると判断した場合(ステップS405:Yes)、予測エリアを回避した目的地までの推奨経路を探索する(ステップS406)。このあと、ディスプレイ312を用いて、推奨経路を表示し(ステップS407)、一連の処理を終了する。
【0055】
一方、ステップS403において、現在時刻が事故発生から所定時間内ではないと判断した場合(ステップS403:No)、すなわち、事故発生から所定の時間が経過している場合、一連の処理を終了する。
【0056】
また、ステップS404において、事故発生地点が現在位置から所定範囲内にないと判断した場合(ステップS404:No)、すなわち、事故発生地点が現在位置から遠方に位置する場合、一連の処理を終了する。また、ステップS405において、事故発生地点が誘導経路上またはその周辺に存在しないと判断した場合(ステップS405:No)、一連の処理を終了する。
【0057】
(表示画面の一例)
つぎに、図5および図6を用いて、表示画面の一例について説明する。図5は、誘導経路の誘導をおこなう際の表示画面の一例を示す説明図である。なお、図5に示す画面は、図4に示したフローチャートの前提として表示される画面であり、すなわち、誘導経路の周辺に事故が発生する前の画面を示したものである。また、この画面は、図3に示したディスプレイ312に表示される画面である。
【0058】
図5において、表示画面500は、車両の現在位置501と、目的地502と、格子状の道路503と、現在位置501から目的地502までを結ぶ誘導経路504とを表示している。ナビゲーション装置300は、このような表示画面500を表示し、誘導経路504の誘導をおこなっている。この誘導中に、誘導経路504上のある地点にて事故が発生したとすると、図6に示す表示画面に移行する。
【0059】
図6は、誘導経路504上のある地点にて事故が発生した際に表示される表示画面の一例を示す説明図である。また、図6に示す表示画面は、図4のステップS407において表示される画面を示している。図6において、表示画面600は、現在位置501と、目的地502と、道路503と、事故発生地点601と、警察署610と、消防署620と、予測経路611,621と、予測エリア630と、推奨経路640とを表示している。
【0060】
事故発生地点601は、図5に示した誘導経路504上に位置している。また、現在位置501と事故発生地点601との距離は所定範囲内にある。また、現在時刻は、事故発生後所定時間内にある。警察署610および消防署620は、上述した所定の施設に相当し、すなわち、緊急車両の出動が見込まれる施設である。
【0061】
予測経路611は、警察署610から事故発生地点601までを示した、パトロールカーの走行が予測される経路である。また、予測経路621は、消防署620から事故発生地点601までを示した、消防車や救急車の走行が予測される経路である。
【0062】
予測エリア630は、予測経路611,621周辺のエリアである。予測エリア630は、緊急車両が経路を変更することにより緊急車両との遭遇が予測されるエリアであるとともに、他の車両が事故発生地点601を迂回することにより混雑が予測されるエリアでもある。推奨経路640は、予測エリア630を回避した、目的地までの最短または最速の経路を示している。
【0063】
このような表示画面600により、利用者は、事故が発生したことにより、予測エリア630を回避した旨を知ることができる。なお、表示画面600に、予測エリア630を回避し、経路が変更した旨を表示させてもよい。また、事故が発生したことにより予測エリア630を回避した旨をスピーカ309から音声出力させてもよい。
【0064】
以上説明したように、本実施例にかかるナビゲーション装置300によれば、事故が発生した場合に、予測エリアを設定し、当該予測エリアを回避した推奨経路を探索するようにしたので、緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止することができる。また、所定の施設の位置情報と、事故発生地点の情報のみで、緊急車両の走行する予測エリアを回避した推奨経路を提示することができるので、特殊な情報や特殊な情報を受信するための装置などを用いることなく、簡単に、緊急車両の走行の妨げや渋滞の発生を抑止することができる。
【0065】
また、緊急車両の走行が予測される予測経路を設定し、当該予測経路周辺のエリアを予測エリアとして設定するようにしたので、予測エリアの範囲を小さく設定することができ、的確な推奨経路を探索することができる。したがって、緊急車両との遭遇を抑制させることができる。
【0066】
また、予測エリアとして、緊急車両の走行が予測される予測経路を設定し、当該予測経路を回避した推奨経路を探索するようにしたので、予測エリアの範囲をより小さく設定することができ、推奨経路が元々の誘導経路から極端に離れるようなことがなく、誘導経路に近い推奨経路を提示することができる。すなわち、推奨経路の誘導経路に対する変更を最小限に抑え、予測エリアを回避した上で、目的地までの最短または最速の推奨経路を提示することができる。
【0067】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が車両の現在位置から所定範囲内に存在する場合に、推奨経路を探索するようにしたので、緊急車両との遭遇や渋滞の発生の可能性が高い場合に、推奨経路を提示することができ、不必要な誘導経路の変更を抑えることができる。
【0068】
また、現在時刻が事故の発生から所定時間内であり、かつ、事故発生地点が誘導経路上またはその周辺に存在する場合に、推奨経路を探索するようにしたので、誘導経路の変更を必要最小限に抑えることができる。
【0069】
以上のように、本発明の経路探索装置、経路探索方法、経路探索プログラム、および記録媒体によれば、緊急車両に遭遇することによる当該緊急車両の走行の妨げや渋滞の発生を抑止することができる。
【0070】
なお、本実施例で説明した経路探索方法は、予め用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【図面の簡単な説明】
【0071】
【図1】本実施の形態にかかる経路探索装置の機能的構成の一例を示すブロック図である。
【図2】本実施の形態にかかる経路探索装置の経路探索処理手順の一例を示すフローチャートである。
【図3】本実施例にかかるナビゲーション装置のハードウェア構成の一例を示すブロック図である。
【図4】ナビゲーション装置による経路探索処理の一例を示すフローチャートである。
【図5】誘導経路の誘導をおこなう際の表示画面の一例を示す説明図である。
【図6】誘導経路上のある地点にて事故が発生した際に表示される表示画面の一例を示す説明図である。
【符号の説明】
【0072】
100 経路探索装置
101 格納部
102 受信部
103 設定部
104 探索部
105 出力部
300 ナビゲーション装置
【特許請求の範囲】
【請求項1】
移動体に搭載され、目的地までの推奨経路を探索する経路探索装置であって、
緊急車両が出動する所定の施設の位置情報を予め格納する格納手段と、
事故発生地点の情報を受信する受信手段と、
前記事故発生地点の情報と前記格納手段に格納されている前記所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定手段と、
前記予測エリアを回避した目的地までの推奨経路を探索する探索手段と、
を備えることを特徴とする経路探索装置。
【請求項2】
前記設定手段は、前記緊急車両が走行すると予測される前記所定の施設から前記事故発生地点までの経路(以下、「予測経路」という)を設定し、当該予測経路周辺のエリアを前記予測エリアとして設定することを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記設定手段は、前記緊急車両が走行すると予測される前記所定の施設から前記事故発生地点までの経路(以下、「予測経路」という)を前記予測エリアとして設定し、
前記探索手段は、前記予測経路を回避した目的地までの推奨経路を探索することを特徴とする請求項1に記載の経路探索装置。
【請求項4】
前記探索手段は、現在時刻が事故の発生から所定時間内であり、かつ、前記事故発生地点が前記移動体の現在位置から所定範囲内に存在する場合に、前記推奨経路を探索することを特徴とする請求項1〜3のいずれか一つに記載の経路探索装置。
【請求項5】
前記探索手段は、現在時刻が事故の発生から所定時間内であり、かつ、前記事故発生地点が誘導経路上またはその周辺に存在する場合に、前記推奨経路を探索することを特徴とする請求項1〜4のいずれか一つに記載の経路探索装置。
【請求項6】
移動体に搭載され、目的地までの推奨経路を探索する経路探索装置の経路探索方法であって、
事故発生地点の情報を受信する受信工程と、
前記事故発生地点の情報と予め格納手段に格納されている緊急車両が出動する所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定工程と、
前記予測エリアを回避した目的地までの推奨経路を探索する探索工程と、
を含むことを特徴とする経路探索方法。
【請求項7】
請求項6に記載の経路探索方法をコンピュータに実行させることを特徴とする経路探索プログラム。
【請求項8】
請求項7に記載の経路探索プログラムを記録したことを特徴とするコンピュータに読み取り可能な記録媒体。
【請求項1】
移動体に搭載され、目的地までの推奨経路を探索する経路探索装置であって、
緊急車両が出動する所定の施設の位置情報を予め格納する格納手段と、
事故発生地点の情報を受信する受信手段と、
前記事故発生地点の情報と前記格納手段に格納されている前記所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定手段と、
前記予測エリアを回避した目的地までの推奨経路を探索する探索手段と、
を備えることを特徴とする経路探索装置。
【請求項2】
前記設定手段は、前記緊急車両が走行すると予測される前記所定の施設から前記事故発生地点までの経路(以下、「予測経路」という)を設定し、当該予測経路周辺のエリアを前記予測エリアとして設定することを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記設定手段は、前記緊急車両が走行すると予測される前記所定の施設から前記事故発生地点までの経路(以下、「予測経路」という)を前記予測エリアとして設定し、
前記探索手段は、前記予測経路を回避した目的地までの推奨経路を探索することを特徴とする請求項1に記載の経路探索装置。
【請求項4】
前記探索手段は、現在時刻が事故の発生から所定時間内であり、かつ、前記事故発生地点が前記移動体の現在位置から所定範囲内に存在する場合に、前記推奨経路を探索することを特徴とする請求項1〜3のいずれか一つに記載の経路探索装置。
【請求項5】
前記探索手段は、現在時刻が事故の発生から所定時間内であり、かつ、前記事故発生地点が誘導経路上またはその周辺に存在する場合に、前記推奨経路を探索することを特徴とする請求項1〜4のいずれか一つに記載の経路探索装置。
【請求項6】
移動体に搭載され、目的地までの推奨経路を探索する経路探索装置の経路探索方法であって、
事故発生地点の情報を受信する受信工程と、
前記事故発生地点の情報と予め格納手段に格納されている緊急車両が出動する所定の施設の位置情報とを用いて、前記緊急車両の走行が予測される、前記所定の施設と前記事故発生地点とを含むエリア(以下「予測エリア」という)を設定する設定工程と、
前記予測エリアを回避した目的地までの推奨経路を探索する探索工程と、
を含むことを特徴とする経路探索方法。
【請求項7】
請求項6に記載の経路探索方法をコンピュータに実行させることを特徴とする経路探索プログラム。
【請求項8】
請求項7に記載の経路探索プログラムを記録したことを特徴とするコンピュータに読み取り可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−288106(P2009−288106A)
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願番号】特願2008−141567(P2008−141567)
【出願日】平成20年5月29日(2008.5.29)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成21年12月10日(2009.12.10)
【国際特許分類】
【出願日】平成20年5月29日(2008.5.29)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]