
経路探索装置、経路探索方法及びコンピュータプログラム
【課題】 充電ポイントにおける待ち時間が少ない中継経路を電気自動車の搭乗者に提供できるようにする。
【解決手段】 本発明は、充電ポイントのある中継地P1,P2を経由して目的地に向かう中継経路を探索する経路探索装置1に関する。この経路探索装置1は、充電ポイントにおける待ち時間に対応する待機コストを設定するコスト設定部2Aと、設定された待機コストをリンクコストに含めて中継経路を探索する経路探索部2Bとを備える。
【解決手段】 本発明は、充電ポイントのある中継地P1,P2を経由して目的地に向かう中継経路を探索する経路探索装置1に関する。この経路探索装置1は、充電ポイントにおける待ち時間に対応する待機コストを設定するコスト設定部2Aと、設定された待機コストをリンクコストに含めて中継経路を探索する経路探索部2Bとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気自動車が出発地から目的地まで走行するのに適した経路を探索する経路探索装置と、その経路探索方法及びコンピュータプログラムに関し、充電ポイントでの待ち時間を考慮した経路の探索方法を提供するものである。
【背景技術】
【0002】
内燃機関で駆動する自動車に搭載され、出発地から目的地までの最適経路を探索する経路探索装置は既に実用化されている。しかし、現在市販の経路探索装置は、電気自動車への搭載を前提にしておらず、電気自動車特有の航続距離や充電時間については特に考慮されていない。
従って、通常の経路探索装置によって最適経路を探索しても、電気自動車は内燃機関の自動車に比べて航続距離が短いため目的地まで到着できない場合がある。
【0003】
そこで、電気自動車向けの経路探索装置として、目的地までの経路が電気自動車の航続距離を超えた場合に、充電ポイント(「充電ステーション」ともいう。)を経由する別の経路を探索することにより、目的地まで確実に到着可能な経路を提供する電気自動車の経路探索装置が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−170293号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の経路探索装置では、充電ポイントにおける混雑状況や予約状況を考慮していないので、経路探索装置が探索した充電ポイントを経由する経路をドライバが採用した場合に、その充電ポイントにおいて充電を開始するまでの順番待ちのために予想外の時間がかかり、予定通りに目的地に到着できない場合がある。
本発明は、上記従来の問題点に鑑み、充電ポイントにおける待ち時間が少ない中継経路を電気自動車の搭乗者に提供することができる経路探索装置等を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1) 本発明に係る経路探索装置は、充電ポイントのある中継地を経由して目的地に向かう中継経路を探索する経路探索装置であって、前記充電ポイントにおける待ち時間に対応する待機コストを設定するコスト設定部と、設定された前記待機コストをリンクコストに含めて前記中継経路を探索する経路探索部と、を備えていることを特徴とする。
【0007】
本発明に係る経路探索装置によれば、上記コスト設定部が、充電ポイントにおける待ち時間に対応する待機コストを設定し、上記経路探索部が、設定された待機コストをリンクコストに含めて中継経路を探索するので、充電ポイントにおける待ち時間ができるだけ少ない中継経路を探索することができる。
このため、探索された中継経路を、例えば車載のディスプレイ等の出力装置を通じて搭乗者に提供することにより、充電ポイントにおける待ち時間が少ない(充電を開始する前の待ち時間がゼロの場合を含む。)中継経路を搭乗者に対して事前に案内することができる。
【0008】
(2) 本発明に係る経路探索装置において、前記コスト設定部は、例えば、前記充電ポイントにおける過去の待ち時間の統計値に基づいて前記待機コストを設定することができる。
この場合、例えば、後述の到着時における予測待ち時間を正確に求める場合に必要となる、充電ポイントの現時点の予約状況を情報収集しなくても、比較的正確なコスト設定が可能となるので、本発明に係る経路探索装置を簡便かつ安価に実現することができる。
【0009】
(3) また、本発明に係る経路探索装置において、前記コスト設定部は、前記充電ポイントにおける現時点の満空状況に基づいて前記待機コストを設定することもできる。
もっとも、現時点の満空状況に基づいて待機コストを設定すると、充電ポイントが遠方のため自車が充電ポイントに到着するまでに比較的長い時間を要する場合には、現時点で空いている充電ポイントが自車の到着時には空いていない恐れがある。
【0010】
(4) そこで、本発明に係る経路探索装置において、前記コスト設定部は、前記充電ポイントの現時点の予約状況から推定される自車の到着時における予測待ち時間に基づいて前記待機コストを設定することが好ましい。
この場合、現時点の予約状況から推定される自車の到着時における予測待ち時間を待機コストに含めて中継経路を探索することになるので、到着時における待ち時間が確実に少ない充電ポイントを含む中継経路を探索できるようになる。
【0011】
(5) また、上述のように、充電ポイントの現時点の予約状況から自車の到着時における予測待ち時間を推定する経路探索装置の場合には、探索された前記中継経路で経由する前記充電ポイントの到着予測時刻に当該充電ポイントが空きの場合に、その充電ポイントに予約を入れる予約通知部を更に備えていることが好ましい。
この場合、上記予約通知部が充電ポイントに予約を入れるので、自車が充電ポイントに到着した時に充電設備を確実に利用することができ、待ち時間をなくすことができる。
【0012】
(6) もっとも、前記予約通知部は、前記充電ポイントに予約を入れた後で到着予測時刻通りに到着しない場合には、次の(a)及び(b)のうちの少なくとも1つの処理を行うことが好ましい。
(a) コスト設定部によるコスト設定と経路探索部による探索処理とを再度実行させる第1処理
(b) 充電ポイントに対する予約の変更を行う第2処理
【0013】
上記(a)の第1処理を行うようにすれば、新たな予約状況から推定される自車の到着時における予測待ち時間が改めて待機コストに設定され、その新たな待機コストをリンクコストに含めた中継経路の探索が改めて行われるので、最新の予約状況を考慮した中継経路を搭乗者に提供することができる。
【0014】
上記(b)の第2処理における「予約の変更」には、予約時刻の変更と予約のキャンセルの双方が含まれる。この第2処理を行うようにすれば、例えば、自車が到着予想時刻よりも早く到着することが判明した場合に、充電ポイントを利用する予約時刻を早めたり、逆に自車が到着予想時刻よりも遅く到着することが判明した場合に、予約時刻を遅らせたり或いは予約のキャンセルを行うことにより、充電ポイントの充電設備を効率よく利用できるようになる。
【0015】
(7) 本発明に係る経路探索方法は、本発明に係る経路探索装置が行う方法であって、当該経路探索装置と同様の作用効果を奏する。
(8) 本発明に係るコンピュータプログラムは、本発明に係る経路探索方法の各ステップをコンピュータに実行させるためのプログラムであって、当該経路探索方法と同様の作用効果を奏する。
【発明の効果】
【0016】
以上の通り、本発明によれば、充電ポイントにおける待ち時間が少ない中継経路を電気自動車の搭乗者に提供することができる。
【図面の簡単な説明】
【0017】
【図1】第1実施形態に係る経路探索装置の全体構成を示すブロック図である。
【図2】充電ポイントの待ち時間の統計値に関する参照テーブルの一例を示す図である。
【図3】ディスプレイによる入力設定画面の一例を示す図である。
【図4】車載コンピュータの処理内容を示すフローチャート(前半)である。
【図5】車載コンピュータの処理内容を示すフローチャート(後半)である。
【図6】充電ポイントがある中継地が選択された場合の経路図の一例である。
【図7】第2実施形態に係る経路探索装置の全体構成を示すブロック図である。
【図8】充電ポイントの予約状況に関する参照テーブルの一例を示す図である。
【図9】充電ポイントの満空状況に関する参照テーブルの一例を示す図である。
【発明を実施するための形態】
【0018】
以下、図面を参照しつつ、本発明の実施形態を説明する。
〔第1実施形態〕
〔経路探索装置の全体構成〕
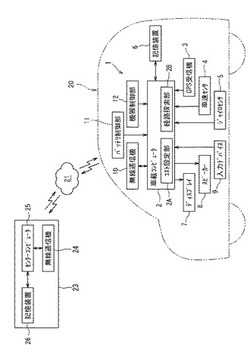
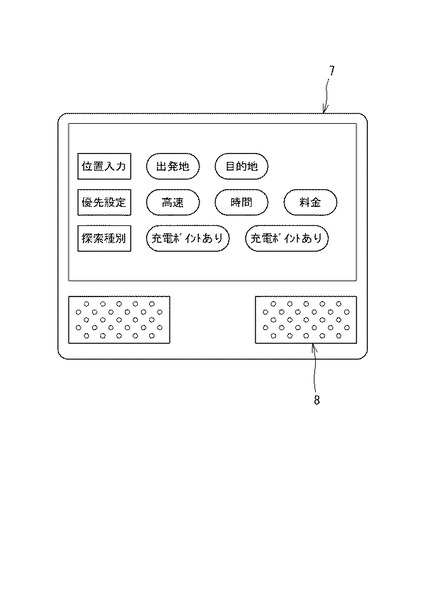
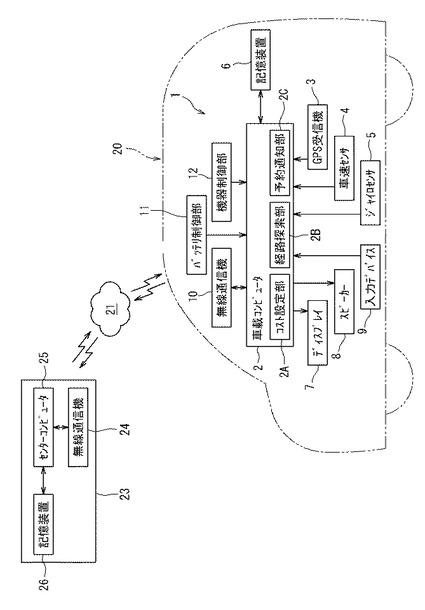
図1は、第1実施形態に係る経路探索装置1の全体構成を示すブロック図である。
この経路探索装置1は、電気自動車(以下、「車両」と略称する場合がある。)20に適した経路探索を行うものであり、その経路探索と車内の各電子機器の動作制御とを行う電子制御装置である車載コンピュータ2を有する。
【0019】
この車載コンピュータ2には、GPS受信機3、車速センサ4、ジャイロセンサ5、記憶装置6、ディスプレイ7、スピーカ8、入力デバイス9、無線通信機10及びバッテリ制御部11がそれぞれ接続されている。
【0020】
上記GPS受信機3、車速センサ4及びジャイロセンサ5は、電気自動車20の走行位置、速度及び向きを把握するセンサ類である。
車載コンピュータ2は、GPS受信機3が定期的に取得するGPS信号により自車の絶対位置を求めるとともに、車速センサ4及びジャイロセンサ5から随時入力される入力信号に基づいてその位置及び方位を補間し、車両20の正確な現在位置及び方位を常に把握している。
【0021】
記憶装置6は、地図データベースを備える。この地図データベースは、車載コンピュータ2に道路地図データを提供するものであり、この道路地図データはリンクデータやノードデータを含み、DVD等の記録媒体に格納されている。なお、この道路地図データには、電気自動車20に給電可能な充電ポイントの位置も含まれている。
記憶装置6は、車載コンピュータ2からの指令に応じて記録媒体から必要な道路地図データを読み出して当該コンピュータ2に提供する。なお、記録媒体としては、DVD以外にも、CD−ROMやメモリカード、ハードディスク等の種々の記録媒体を採用できる。
【0022】
ディスプレイ7とスピーカ8は、車載コンピュータ2が生成した各種情報を車両20の搭乗者に提示するために利用される。具体的には、ディスプレイ7は、経路探索の際の入力設定画面、自車周辺の地図画像及び目的地までの経路情報等を表示し、スピーカ8は、自車を目的地に誘導するためのアナウンスを音声出力する。
なお、本実施形態では、車載コンピュータ2が、探索した経路(後述の直行経路及び中継経路)の走行中に使用可能な電装機器の設定状態を判定するが、判定した設定状態についてもディスプレイ7によって表示される。
【0023】
入力デバイス9は、車両20のドライバが経路探索に関する各種入力を行うためのものである。
具体的には、この入力デバイス9は、操舵ハンドルに設けられた操作スイッチ、ジョイスティック、或いは、ディスプレイ7に設けたタッチパネル等の各種入力手段の組み合わせよりなる。なお、ドライバの音声認識によって入力を受け付ける音声認識装置を入力デバイス9とすることもできる。この入力デバイス9にドライバが行った入力信号は車載コンピュータ2に送られる。
【0024】
無線通信機10は、情報センター23との間の無線通信を介して、当該情報センター23から各種の提供情報を取得するものである。
すなわち、無線通信機10は、車載コンピュータ2の指令により移動体通信網21を利用して情報センター23にアクセスし、渋滞情報等の提供情報が情報センター23から送信されると、この提供情報を受信して車載コンピュータ2に通知する。なお、情報センター23から受ける提供情報には、充電ポイントの待ち時間情報が含まれるが、これについては後述する。
【0025】
車載コンピュータ2は、例えば、各種の制御プログラムを実装したマイクロコンピュータなどの演算処理装置よりなり、その制御プログラムを実行することにより、ディスプレイ7に地図画像を表示させる機能、出発地から目的地までの経路(中継地がある場合はその位置を含む。)を算出する機能、その経路に従って車両20を目的地まで誘導する機能等、各種のナビゲーション機能を実行可能である。
また、本実施形態の車載コンピュータ2は、目的地までの経路が探索された場合に、車両20が現在のバッテリ残容量で到着できるか否かを判定する機能も備えている。
【0026】
車載コンピュータ2は、上記各機能を実現させる所定のコンピュータプログラムをインストールすることによって構成されており、このプログラムは、CD−ROM、DVD−ROMなどの記録媒体に格納して販売又は譲渡することができる。また、このプログラムの販売又は譲渡は、サーバコンピュータからネットワーク経由でダウンロードすることによって行ってもよい。
【0027】
バッテリ制御部11は、車内の通信ケーブルを介して車載コンピュータ2と通信可能に接続されており、自車のバッテリの電力状態を監視しつつ、バッテリの充放電動作を制御する。車載コンピュータ2は、経路探索を行う場合に、バッテリ制御部11から現時点に於けるバッテリ残容量の情報を取得する。
記憶装置6は、自車走行に必要な走行電力を演算するためのデータとして、自車が単位距離(例えば1km)だけ走行する間に、走行駆動源である電動モータにて消費される平均電力量を、例えば一般道走行時や高速道路走行時などの道路種別ごとに記憶している。
【0028】
〔地図データベースの道路地図データ〕
地図データベースの道路地図データは「リンクデータ」と「ノードデータ」を含む。このうち、「ノードデータ」は、交差点IDと交差点位置とを対応付けたデータである。また、「リンクデータ」は、特定リンクのリンクIDに対して、次の情報1)〜4)を対応付けたデータよりなる。
1) 特定リンクの始点・終点・補間点の位置
2) 特定リンクの始点に接続するリンクID
3) 特定リンクの終点に接続するリンクID
4) 特定リンクのリンクコスト
【0029】
また、地図データベースには、地図上の各道路に対応するリンクが一般道路か有料道路かの道路種別や有料道路の場合の通行料金、及び、電気自動車20に給電可能な充電ポイントのステーションIDとその位置も含まれている。
【0030】
上記「リンクコスト」は、例えば、特定リンクとその終点に接続するリンクの組み合わせの数だけ用意されており、特定リンクの始点に進入してから当該特定リンクの終点を退出し、次に接続するリンクの始点に進入するまでに要する「リンク旅行時間」を含む。
すなわち、リンクコストには、特定リンクの始点から終点までを走行するのに要する「リンク通過時間」と、その特定リンクの終点から次のリンクの始点までを走行するのに要する時間コスト、つまり、交差点通過に要する「交差点通過時間」とが含まれる。
【0031】
上記リンク旅行時間は、平日、土曜、日曜及び祝日といった日種別ごとに、現時点から1日先までの5分ごとのデータが用意されており、この5分ごとのデータは、交通情報センターから取得可能なVICS(「VICS」は(財)日本道路交通情報センターの登録商標)情報や、他車両から取得したプローブ情報に基づいて作成される。
なお、本実施形態では、上記リンク旅行時間だけでなく、充電ポイントにおける待ち時間に対応する「待機コスト」も上記リンクコストに含めて設定されるが、その設定方法の詳細については後述する。
【0032】
本実施形態の車載コンピュータ2は、前記制御プログラムの実行によって実現される機能実現部として、コスト設定部2Aと経路探索部2Bとを備えている。
このうち、コスト設定部2Aは、経路探索部2Bが充電ポイントを経由する中継経路を探索する場合において、充電ポイントにおいて電気自動車20の充電を開始するまでの待ち時間に対応する「待機コスト」を設定する機能を有する。また、経路探索部2Bは、設定された待機コストをリンクコストに含めて中継経路を探索する機能を有する。
【0033】
なお、経路探索部2Bが探索した最適な中継経路は、ディスプレイ7に出力されてその画面に表示され、これによって当該中継経路が搭乗者に提供される。
経路探索部2Bを構成するコンピュータプログラムには、具体的にはダイクストラ法やポテンシャル法による経路探索ロジックが含まれている。すなわち、本実施形態の経路探索部2Bは、上記経路探索ロジックを含むプログラムを実行することで出発地から目的地までのリンクコストの累計が最小となる推奨経路を探索することができる。
【0034】
ここで、ダイクストラ法では、探索開始リンクから始まるリンクのツリーを構成していくに当たって、あるリンクから複数のリンクに枝分かれする場合に、各枝のリンクの経路コスト(探索開始リンクから当該リンクに至るリンクコストの総和)の大小を比較し、この経路コストの小さい順に並べ変えて、経路コストの小さいリンクからさらに探索を続けて行くという方法を採用している。
従って、最初に探索終了リンクに到達すれば、その時点で探索終了リンクに到達する最小コストの経路が決定される。リンクコストの小さいリンクから順に探索を行うので、真先に探索終了リンクに到達した経路がそのまま最小コストの経路となるからである。
【0035】
一方、ポテンシャル法では、あるリンクから複数のリンクに枝分かれする場合に、各枝のリンクの経路コストの大小の比較をせずに、すべてのリンクを同等に扱い、各枝のリンクからさらに探索を続けていくという方法を採用している。
従って、最初に探索終了リンクに到達しても、その時点では、他の経路を通って探索終了リンクに到達する可能性が残されているため、ネットワークにあるすべてのリンクを探索し終わった時点で初めて、探索終了リンクに到達する最小コストの経路が決定される。
【0036】
〔情報センター〕
図1に示すように、情報センター23は、無線通信機24とセンターコンピュータ25と記憶装置26とを備えている。無線通信機24は、移動体通信網21を介して各車両20の無線通信機10や、日本全国或いは所定地域の充電ポイントに設けられた通信装置(図示せず)と通信可能となっている。
センターコンピュータ25は、充電ポイントにおいて過去に発生した時間帯ごとの待ち時間を、各充電ポイントからそれぞれ収集している。
【0037】
なお、本実施形態では、各充電ポイントから収集される「待ち時間」は、充電ポイントに到着してから電気自動車20の充電を開始するまでに要する待ち時間(以下、「開始待ち時間」ということがある。)のことである。
【0038】
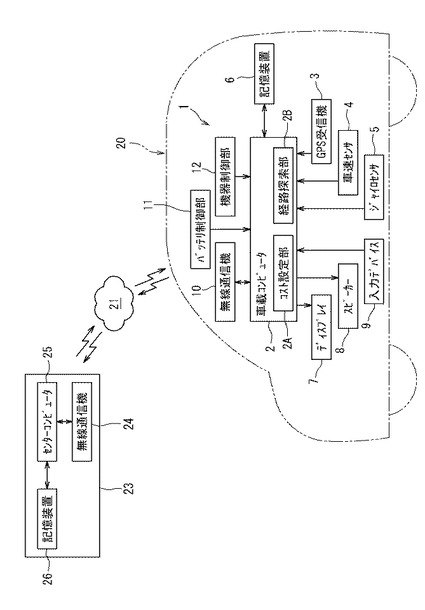
センターコンピュータ25は、各充電ポイントの待ち時間データの統計値(例えば、平均値や中央値)を、平日、土曜、日曜及び祝日といった日種別の時間帯ごとに区分し、参照テーブル22Aに纏めて記憶装置26に記憶させている。図2はその参照テーブル22Aの一例を示す図である。
図2に示すように、この参照テーブル22Aは日種別のテーブル群よりなり、特定の日の各テーブルには、充電ポイントを識別するステーション番号ごとに、1日を所定時間(図例では3時間)で区分した時間帯ごとの開始待ち時間の統計値が記されている。
【0039】
図2に例示する参照テーブル22Aによれば、例えば、ステーション番号が「1」の充電ポイントにおける開始待ち時間の統計値は、0時〜3時では「0」(単位は時間、以下同様。)、3時〜6時では「0」、6時〜9時では「0.1」、9時〜12時では「0.5」、12時〜15時では「1.5」となっている。
また、ステーション番号が「2」の充電ポイントにおける開始待ち時間の統計値は、0時〜3時では「0」、3時〜6時では「0」、6時〜9時では「0.2」、9時〜12時では「1.0」、12時〜15時では「0.5」となっている。
【0040】
センターコンピュータ25は、記憶装置26に格納された上記参照テーブル22Aを、所定期間ごとにダウンリンク情報に含めて電気自動車20に配信する。これを受信した電気自動車20の車載コンピュータ2は、ダウンリンク情報から参照テーブル22Aを抽出して自車の記憶装置6に格納する。
なお、図2の参照テーブル22Aは、過去の開始待ち時間の統計値をテーブル化したものであるから、必ずしもセンターコンピュータ25が自動配信する必要はない。
【0041】
例えば、情報センター23のウェブサイトに参照テーブル22Aが公開されている場合には、それを欲する搭乗者がインターネットを通じて参照テーブル22Aをダウンロードして、記憶装置6に格納することにしてもよい。
また、車両20の車載コンピュータ2が各充電ポイントからデータ収集することで、各々の車両20が自律的に参照テーブル22Aを作成し、自車の記憶装置6に記憶させことにしてもよい。
【0042】
〔ディスプレイの入力設定画面〕
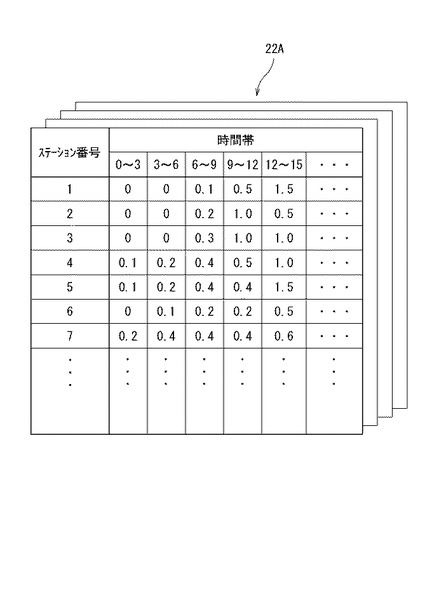
図3は、ディスプレイ7による入力設定画面の一例を示す図である。
図3に示すように、ディスプレイ7の入力画面には、出発地と目的地の「位置入力アイコン」と、高速優先、時間優先又は料金優先のいずれかを1つを選択する「優先設定アイコン」と、充電ポイントを経由する中継経路の探索を行うか否かを選択するための「探索種別アイコン」とが表示されている。
【0043】
本実施形態の車載コンピュータ2は、車両20の搭乗者が「探索種別アイコン」の右側にある「充電ポイントあり」を選択すると、充電ポイントを経由する「中継経路」を含む経路を探索し、「充電ポイントなし」を選択すると、充電ポイントを経由せずに目的地に直行する「直行経路」のみの探索を行うようになっている。
【0044】
〔車載コンピュータの処理内容〕
図4及び図5は、車載コンピュータ2の処理内容を示すフローチャートである。
以下、このフローチャートを参照しつつ、第1実施形態において車載コンピュータ2が行う電気自動車20のための経路探索方法を説明する。
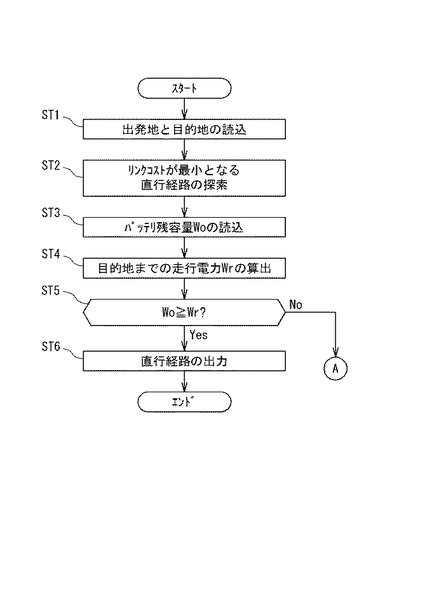
<直行経路の探索処理>
図4に示すように、車載コンピュータ2の経路探索部2Bは、まず、ディスプレイ7の入力操作画面にて搭乗者が入力した出発地と目的地を読み込む(ステップST1)。
【0045】
なお、上記入力操作画面にて搭乗者が「出発地」を入力しない場合には、GPS受信機3によって得られた「現在位置」が出発地として設定される。
その後、経路探索部2Bは、上記出発地から目的地までを、充電せずに車両20が直行する場合のリンクコストが最小となる「直行経路」を、ダイクストラ法やポテンシャル法等の所定の経路探索ロジックによって探索する(ステップST2)。
【0046】
すなわち、経路探索部2Bは、出発地に最も近いリンク又はノードを探索開始リンクとし、目的地に最も近いリンクを探索終了リンクとして、前記リンクデータの中から、探索開始リンクから探索終了リンクまでを含むネットワークデータを記憶装置6の地図データベースから取得し、このネットワークデータに対して経路探索ロジックを実行する。
より具体的には、探索開始リンクから探索終了リンクに至るリンクを順次加算してリンクのツリーを構成して行き、探索終了リンクに至るツリーの中で、次の式(1)で定義されるリンクコストの累計が最も少ない直行経路を、ダイクストラ法又はポテンシャル法による経路探索ロジックにより求める。
【0047】
リンクコスト= (a×リンク旅行時間)
+(b×リンクの距離)
+(c×道路種別)
+(d×通行料金)
+(e×交差点通過時間)
+(f×待機コスト) ………(1)
【0048】
なお、上記式(1)におけるa〜fは、ルート計算種別ごとに設定される係数であり、充電ポイントを経由しない「直行経路」を探索する図4のステップST2の場合には、コスト設定部2Aにより待機コストの係数が「0」に設定される。
【0049】
次に、車載コンピュータ2の経路探索部2Bは、現時点のバッテリ残容量Woを読み込むとともに(ステップST3)、上記直行経路を目的地まで走破するのに必要な走行電力Wrを算出する(ステップST4)。
この走行電力Wrは、電動モータにより消費される単位距離当たりの平均電力量に、直行経路の累積距離を乗算することによって算出することができる。
【0050】
その後、経路探索部2Bは、バッテリ残容量Woが走行電力Wr以上であるか否かを判定し(ステップST5)、この判定結果が肯定的である場合には、探索結果である直行経路をディスプレイ7に出力する(ステップST6)。
これに対して、その判定結果が否定的、すなわち、バッテリ残容量Woが走行電力Wr未満には、探索した直行経路では目的地に到着できないので、図5に示す中継経路の探索処理に移行する。
【0051】
なお、図3に示す入力操作画面において、ユーザ(車両20の搭乗者)が「探索種別」として「充電ポイントなし」を選択した場合には、ステップST5の判定結果が否定的である場合でも図5の探索処理に移行せず、出発地まで到着可能な直行経路がない旨がディスプレイ7によって表示される。
【0052】
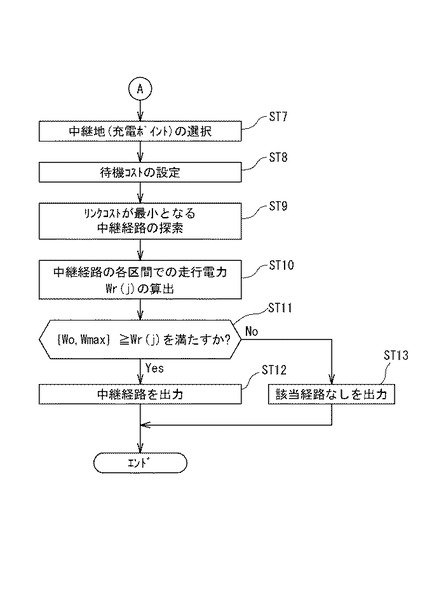
<中継経路の探索処理>
図5に示す中継経路の探索処理では、車載コンピュータ2の経路探索部2Bが、まず充電ポイントのある中継地を選択する(ステップST6)。
なお、この選択処理は、例えば、前記直行経路に含まれるリンクノードを中心として所定の半径(例えば、10km)以内にある充電ポイントを逐次検出することによって行うことができる。
【0053】
次に、車載コンピュータ2のコスト設定部2Aが、選択された1又は複数の充電ポイントについて待機コストの設定を行う(ステップST8)。
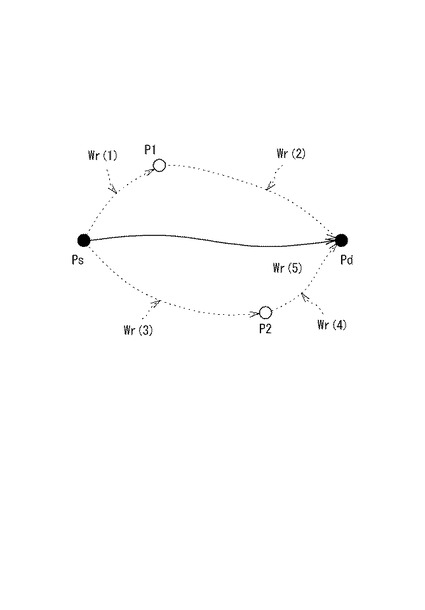
図6は、充電ポイントがある中継地P1,P2が選択された場合の経路図の一例を示している。この例では、ステップST7において2つの中継地P1,P2が選択されたものとし、中継地P1,P2の経由を条件とした次の2種類のルートを想定している。
(a) Ps→P1→Pd
(b) Ps→P2→Pd
【0054】
また、中継地P1が図2のステーション番号1であり、中継地P1への到達予測時刻が12:30であるとし、中継地P2が図2のステーション番号2であり、中継地P2への到着予測時刻が13:30であると仮定する。
この場合、図2の参照テーブル22Aによれば、上記の各到着予測時刻はいずれも12時〜15時の時間帯に含まれている。
【0055】
そこで、車載コンピュータ2のコスト設定部2Aは、図2の参照テーブル22A中のデータ(開始待ち時間の統計値)の中から、ステーション番号が「1」でかつ12時〜15時の時間帯に含まれる「1.5」と、ステーション番号が「2」でかつ12時〜15時に時間帯に含まれる「0.5」を抽出し、これらのデータ値をリンクコストの累計式である前記式(1)の「待機コスト」に設定する。
【0056】
その後、車載コンピュータ2の経路探索部2Bは、設定された上記待機コストを用いて、中継地P1,P2を経由して目的地Pdに向かう場合にリンクコストが最小となる「中継経路」を、前記所定の探索ロジックによって探索する(ステップST9)。
すなわち、経路探索部2Bは、P1経由を条件とするルート(a)の場合は式(1)の待機コストを「1.5」とし、P2経由を条件とするルート(b)については、式(1)の待機コストを「0.5」として、探索終了リンクに至るツリーの中で、式(1)で定義されるリンクコストの累計が最も少ない中継経路を、ダイクストラ法又はポテンシャル法による経路探索ロジックにより求める。
【0057】
次に、経路探索部2Bは、特定された最適な中継経路を目的地Pdまで走破するのに必要な走行電力Wr(j)を、その中継経路を構成する区間ごとに算出する(ステップST10)。
ここで、ステップST10の「j」は、図6における各区間に割り当てた区間番号を示し、図6の例では、Ps〜P1の区間をj=1、P1〜Pdの区間をj=2、Ps〜P2の区間をj=3、P2〜Pdの区間をj=4としている。
【0058】
例えば、最適なものとして特定された中継経路がPs→P2→Pdのルート(b)であったとすると、経路探索部2Bは、電動モータにより消費される単位距離当たりの平均電力量に、区間番号j=3と区間番号i=4の各区間の累積距離を乗算することにより、その区間ごとの走行電力Wr(3),Wr(4)を算出する。
【0059】
次に、経路探索部2Bは、現時点のバッテリ残容量W0或いは充電後のバッテリ容量Wmaxが、各区間の走行電力Wr(j)以上か否かを判定する(ステップST11)。
なお、ステップST11における{W0,Wmax}は、区間の始点が出発地Psである区間番号jの場合は、現時点のバッテリ残容量W0を適用し、区間の始点が中継地P1,P2である区間番号jの場合は、充電後のバッテリ残容量Wmaxを適用することを意味する。
【0060】
従って、特定された中継経路が上記ルート(b)であるとすると、経路探索部2Bは、現時点のバッテリ残容量Woが走行電力W(3)以上であるか否かを判定し、充電後のバッテリ残容量Wmaxが走行電力W(4)以上であるか否かを判定することになる。
なお、充電後のバッテリ残容量Wmaxは、必ずしもフル充電の場合のバッテリ残容量でなくてもよく、所定距離(例えば、50km)の航続距離を確保できる分の容量であってもよい。
【0061】
経路探索部2Bは、上記の判定結果が肯定的である場合には、探索結果である中継経路をディスプレイ7に出力し(ステップST12)、この経路はディスプレイ7の画面表示によって搭乗者に提供される。
一方、経路探索部2Bは、その判定結果が否定的、すなわち、バッテリ残容量Woが走行電力W(3)未満或いは充電後のバッテリ容量Wmaxが走行電力W(4)未満である場合には、探索結果の中継経路では目的地Pdに到着できないので、直行経路の場合も含めて、目的地Pdに到着可能な経路がない旨の出力を行う(ステップST13)。
【0062】
上述の通り、第1実施形態の経路探索装置1によれば、車載コンピュータ2のコスト設定部2Aが、充電ポイント(中継地点P1,P2)における過去の開始待ち時間の統計値を待機コストとして設定し、同コンピュータ2の経路探索部2Bが、設定された待機コストをリンクコストに含めて中継経路を探索するので、充電開始までの待ち時間ができるだけ少ない中継経路を探索することができる。
このため、探索された中継経路をディスプレイ7によって搭乗者に提供することにより、充電開始までの待ち時間が少ない或いは待ち時間なしの中継経路を搭乗者に対して事前に案内することができる。
【0063】
また、第1実施形態の経路探索装置1によれば、コスト設定部2Aが、充電ポイントにおける過去の開始待ち時間の統計値を待機コストとして設定するので、後述の第2実施形態のように、到着時における予測待ち時間を求める場合に必要となる、充電ポイントの現時点の予約状況を情報収集しなくても、比較的正確なコスト設定を行うことができる。
従って、充電ポイントでの待機コストを考慮した中継経路を探索する経路探索装置1を簡便かつ安価に実現できるという利点がある。
【0064】
なお、中継経路の探索の場合に用いる「待機コスト」には、電気自動車20の充電を開始するまでの「開始待ち時間」に加えて、充電ポイントで行う充電に必要な「充電時間」を含めることにしてもよい。
この「充電時間」は、充電開始時におけるバッテリ残存量や、フル充電を行うか否かによって変動するが、例えば、1回の充電にかける充電時間を予め設定値として固定しておけば、その設定値を開始待ち時間に加算することにより、充電ポイントにおける充電終了までの待ち時間に対応する待機コストを設定することができる。
【0065】
〔第2実施形態〕
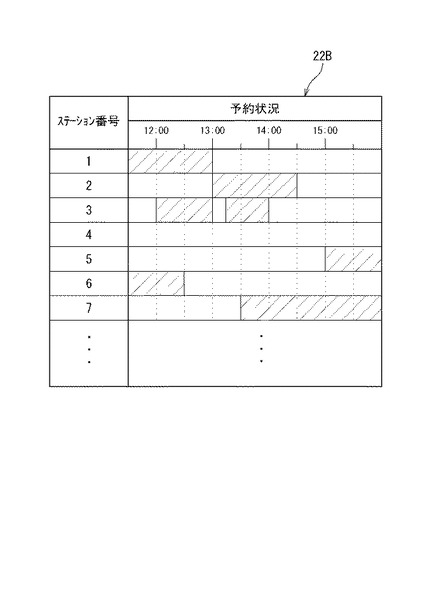
図7は、第2実施形態に係る経路探索装置1の全体構成を示すブロック図である。また、図8は、第2実施形態の経路探索装置1が使用する、充電ポイントの予約状況に関する参照テーブル22Bの一例を示す図である。
本実施形態の経路探索装置1では、センターコンピュータ25が、各充電ポイントの過去の開始待ち時間の統計値ではなく、例えば図8に示すような、現時点の予約状況に関する参照テーブル22Bをほぼリアルタイムに生成することを前提としている。
【0066】
すなわち、センターコンピュータ25は、充電ポイントが予約で詰まっているか或いは利用可能かについての予約情報を、当該ポイントに設置されたサーバコンピュータから所定時間(例えば5分)ごとに取得しており、取得した予約情報に基づいて、現時点以降に利用可能な時間帯と利用不能な時間帯を充電ポイントごとにデーブル化して、図8の参照テーブル22Bを更新している。
なお、センターコンピュータ25は、更新した参照テーブル22Bを含むダウンリンク情報を各車両20に配信し、そのダウンリンク情報を受信した車両20の車載コンピュータ2は、自車の記憶装置6に当該参照テーブル22Bを記憶させる。
【0067】
図8に例示する参照テーブル22Bにおいて、斜線部分は使用中又は予約ありのために利用不能な時間帯を示し、空白部分はそれ以外の利用可能な時間帯を示している。
従って、例えば、ステーション番号が「1」の充電ポイントでは、現時点から13:00までの時間帯が利用不能であり、13:00以後が利用可能な時間帯となっている。また、ステーション番号が「2」の充電ポイントでは、13:00〜14:30までの時間帯が利用不能であり、それ以外の時間帯が利用可能な時間帯となっている。
【0068】
本実施形態の経路探索装置1では、図5に示す待機コストの設定(ステップST8)において、車載コンピュータ2のコスト設定部2Aが、上記参照テーブル22Aの予約状況と中継地P1,P2への到着予測時刻とから、その中継地P1,P2における予測待ち時間を算出し、この待ち時間を式(1)のリンクコストの待機コストとして採用する。
例えば、ステーション番号が「1」の充電ポイント(中継地)P1への到着予測時刻が12:30であるとすると、コスト設定部2Aは、その中継地P1での予測待ち時間である30分を開始待ち時間に対応する待機コストに設定する。
【0069】
また、ステーション番号が「2」の充電ポイント(中継地)P2への到着予測時刻が13:00であるとすると、コスト設定部2Aは、その中継地P1での予測待ち時間である90分を開始待ち時間に対応する待機コストに設定する。
このように、第2実施形態の経路探索装置1では、コスト設定部2Aが、充電ポイントP1,P2において電気自動車20の充電を開始するまでの開始待ち時間に対応する待機コストとして、充電ポイントP1,P2の現時点の予約状況から推定される自車の到着時における予測待ち時間を用いる。
【0070】
なお、車載コンピュータ2の経路探索部2Bは、上記のようにしてコスト設定部2Aが設定した待機コストを用いて、式(1)のリンクコストが最小となる中継経路を探索するが、この点は第1実施形態の場合と同様である。また、この第2実施形態においても、充電時間を待機コストに含めることにしてもよい。
第2実施形態の経路探索装置1によれば、経路探索部2Bが、現時点の予約状況から推定される自車の到着時における予測待ち時間に基づいて設定された待機コストを、リンクコストに含めて中継経路を探索するので、到着時における待ち時間が確実に少ない充電ポイントを含む中継経路を、より正確に探索することができる。
【0071】
〔予約通知部について〕
ところで、第2実施形態の経路探索装置1では、充電ポイントの現時点の予約状況を示す図8の参照テーブル22Bを車両20が把握していることから、充電ポイントが空きの場合に自動的に予約を入れる予約通知部2C(図7参照)が車載コンピュータ2に設けられている。
すなわち、この予約通知部2Cは、探索された中継経路で経由する充電ポイントの到着予測時刻に当該充電ポイントが空きの場合に、無線通信機10を通じて充電ポイントに予約を入れる処理を実行する。
【0072】
もっとも、上記のように車両20が充電ポイントに自動的に予約を入れるシステムにすると、例えば、予約を入れた車両20が到着予測時刻よりも早く到着した場合には、予想以上の待ち時間となる恐れがあり、逆に到着予測時刻よりも遅く到着した場合には、充電ポイントの事業者に迷惑をかけることになる。
そこで、充電ポイントに予約を入れた後で到着予測時刻通りに到着しないことが判明した場合には、充電ポイントに対する予約を変更する処理を、予約通知部2Cが行うようにすることが好ましい。
【0073】
この処理を行うようにすれば、例えば、自車が到着予想時刻よりも早く到着することが判明した場合に、充電ポイントを利用する予約時刻を早めたり、逆に自車が到着予想時刻よりも遅く到着することが判明した場合に、予約時刻を遅らせたり或いは予約のキャンセルを行うことにより、充電ポイントの充電設備を効率よく利用できるようになる。
このように、予約通知部2Cが行う予約の変更には、予約時刻の変更だけでなく、予約のキャンセルが含まれていてもよい。
【0074】
また、充電ポイントに予約を入れた後で到着予測時刻通りに到着しないことが判明した場合には、コスト設定部2Aによるコスト設定と経路探索部2Bによる探索処理とを再度実行させる処理を、予約通知部2Cに行わせることにしてもよい。
この場合、コスト設定部2Aが、最新の予約状況(図8)から推定される自車の到着時における予測待ち時間を改めて待機コストとして設定し、経路探索部2Bが、その待機コストをリンクコストに含めて中継経路を探索するので、最新の予約状況を考慮した中継経路を搭乗者に提供することができる。
【0075】
〔予測待ち時間の別の算出例〕
なお、第2実施形態において、到着予測時刻における「予測待ち時間」は、充電ポイントが利用不能である1つの時間帯だけでなく、利用不能な時間帯で挟まれる空き時間の長さも考慮に入れて算出することが好ましい。
例えば図8に示すように、ステーション番号が「3」の充電ポイントでは、12:00〜13:00までの時間帯と、13:15〜14:00までの時間帯とに、既に予約が入っているものとする。
【0076】
また、上記充電ポイントへの自車の到着予測時刻が12:30であり、この車両20の充電時間は少なくとも60分必要であるとする。
この場合、到着予測時刻(12:30)からその次の空き時刻(13:00)までを一律に予測待ち時間とすると、待機コストを「30分」とした上で、13:00〜13:15までの15分間だけ充電を行うことになるが、これでは、当該車両20に必要な充電時間(60分)以下の極めて短い時間でしか充電できない。
【0077】
そこで、利用不能な1つの時間帯と次の利用不能な時間帯との間の空き時間が、充電時間(60分)未満である場合には、それらの時間帯を一連の時間帯と見なして、予測待ち時間を算出することが好ましい。
すなわち、図8のステーション番号「3」の場合には、到着予測時刻(12:30)の直後の空き時刻(13:00)ではなく、その次の空き時刻(14:00)までの「90分」を予測待ち時間とする。
【0078】
上記のように、自車の充電に必要な充電時間以下の空き時間は空いていないと見なして予測待ち時間を算出することにより、必要な充電時間未満の極めて短い時間での充電を強いられる事態を未然に回避することができ、自車に必要な予測待ち時間を正確に算出できるようになる。
【0079】
また、例えば図8に示すステーション番号が「2」の充電ポイントにおいて、自車の到着予測時刻が12:45である場合には、その時点では空きであっても、13:00以後の予約が既に入っているために、充電時間未満の15分しか充電できないことになる。
そこで、自車の到着予測時刻においては充電ポイントが空きの時間帯であっても、それだけで、充電ポイントを一律に空きと判断して開始待ち時間をゼロとするのではなく、その時刻から次の予約開始時刻までの時間が充電時間未満の短い時間である場合には、充電ポイントが空いていないと見なして予測待ち時間を算出することが好ましい。
【0080】
図8のステーション番号が「2」の場合には、到着予測時刻(12:45)以後の次の予約の終了時刻が14:30であるから、12:45から14:30までの105分が予測待ち時間として設定されることになる。
【0081】
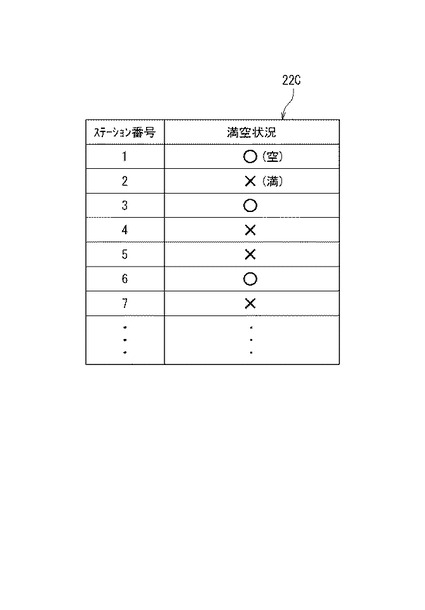
〔第3実施形態〕
図9は、充電ポイントの満空状況に関する参照テーブル22Cの一例を示す図である。 この参照テーブル22Cにおいて、「○」はそのステーション番号の充電ポイントが空いていることを意味し、「×」はそのステーション番号の充電ポイントが満員で利用できないことを示している。
【0082】
この場合、コスト設定部2Aが、「○」の充電ポイントについては待機コストを比較的小さく設定し、「×」の充電ポイントについては待機コストを比較的大きめに設定することにより、充電ポイントにおいて電気自動車20の充電を開始するまでの待ち時間に対応する待機コストを設定することができる。
もっとも、図9のような現時点の満空状況を採用すると、待機コストの設定処理を単純化できる利点があるが、自車が充電ポイントに到着するまでに比較的長い時間を要する場合には、現時点で空きの充電ポイントが自車の到着時には空いていない恐れがある。
【0083】
従って、中継地に到着した際の待ち時間をできるだけなくす観点からすると、第2実施形態のように、現時点の予約状況(図8)に基づく正確な予測待ち時間を待機コストとして設定することが好ましい。
【0084】
〔その他の変形例〕
上述の各実施形態は例示であって制限的なものではない。本発明の権利範囲は特許請求の範囲によって示され、そこに記載された構成と均等の範囲内のすべての変更は、本発明の権利範囲に包含される。
例えば、上述の実施形態では、電気自動車20の車載コンピュータ2が本発明の経路探索を行っているが、情報センター23のセンターコンピュータ25にて本発明の経路探索を行い、その結果を電気自動車20に通知するようにしてもよい。
【符号の説明】
【0085】
1 経路探索装置
2 車載コンピュータ
2A コスト設定部
2B 経路探索部
2C 予約通知部
7 ディスプレイ
【技術分野】
【0001】
本発明は、電気自動車が出発地から目的地まで走行するのに適した経路を探索する経路探索装置と、その経路探索方法及びコンピュータプログラムに関し、充電ポイントでの待ち時間を考慮した経路の探索方法を提供するものである。
【背景技術】
【0002】
内燃機関で駆動する自動車に搭載され、出発地から目的地までの最適経路を探索する経路探索装置は既に実用化されている。しかし、現在市販の経路探索装置は、電気自動車への搭載を前提にしておらず、電気自動車特有の航続距離や充電時間については特に考慮されていない。
従って、通常の経路探索装置によって最適経路を探索しても、電気自動車は内燃機関の自動車に比べて航続距離が短いため目的地まで到着できない場合がある。
【0003】
そこで、電気自動車向けの経路探索装置として、目的地までの経路が電気自動車の航続距離を超えた場合に、充電ポイント(「充電ステーション」ともいう。)を経由する別の経路を探索することにより、目的地まで確実に到着可能な経路を提供する電気自動車の経路探索装置が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−170293号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の経路探索装置では、充電ポイントにおける混雑状況や予約状況を考慮していないので、経路探索装置が探索した充電ポイントを経由する経路をドライバが採用した場合に、その充電ポイントにおいて充電を開始するまでの順番待ちのために予想外の時間がかかり、予定通りに目的地に到着できない場合がある。
本発明は、上記従来の問題点に鑑み、充電ポイントにおける待ち時間が少ない中継経路を電気自動車の搭乗者に提供することができる経路探索装置等を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1) 本発明に係る経路探索装置は、充電ポイントのある中継地を経由して目的地に向かう中継経路を探索する経路探索装置であって、前記充電ポイントにおける待ち時間に対応する待機コストを設定するコスト設定部と、設定された前記待機コストをリンクコストに含めて前記中継経路を探索する経路探索部と、を備えていることを特徴とする。
【0007】
本発明に係る経路探索装置によれば、上記コスト設定部が、充電ポイントにおける待ち時間に対応する待機コストを設定し、上記経路探索部が、設定された待機コストをリンクコストに含めて中継経路を探索するので、充電ポイントにおける待ち時間ができるだけ少ない中継経路を探索することができる。
このため、探索された中継経路を、例えば車載のディスプレイ等の出力装置を通じて搭乗者に提供することにより、充電ポイントにおける待ち時間が少ない(充電を開始する前の待ち時間がゼロの場合を含む。)中継経路を搭乗者に対して事前に案内することができる。
【0008】
(2) 本発明に係る経路探索装置において、前記コスト設定部は、例えば、前記充電ポイントにおける過去の待ち時間の統計値に基づいて前記待機コストを設定することができる。
この場合、例えば、後述の到着時における予測待ち時間を正確に求める場合に必要となる、充電ポイントの現時点の予約状況を情報収集しなくても、比較的正確なコスト設定が可能となるので、本発明に係る経路探索装置を簡便かつ安価に実現することができる。
【0009】
(3) また、本発明に係る経路探索装置において、前記コスト設定部は、前記充電ポイントにおける現時点の満空状況に基づいて前記待機コストを設定することもできる。
もっとも、現時点の満空状況に基づいて待機コストを設定すると、充電ポイントが遠方のため自車が充電ポイントに到着するまでに比較的長い時間を要する場合には、現時点で空いている充電ポイントが自車の到着時には空いていない恐れがある。
【0010】
(4) そこで、本発明に係る経路探索装置において、前記コスト設定部は、前記充電ポイントの現時点の予約状況から推定される自車の到着時における予測待ち時間に基づいて前記待機コストを設定することが好ましい。
この場合、現時点の予約状況から推定される自車の到着時における予測待ち時間を待機コストに含めて中継経路を探索することになるので、到着時における待ち時間が確実に少ない充電ポイントを含む中継経路を探索できるようになる。
【0011】
(5) また、上述のように、充電ポイントの現時点の予約状況から自車の到着時における予測待ち時間を推定する経路探索装置の場合には、探索された前記中継経路で経由する前記充電ポイントの到着予測時刻に当該充電ポイントが空きの場合に、その充電ポイントに予約を入れる予約通知部を更に備えていることが好ましい。
この場合、上記予約通知部が充電ポイントに予約を入れるので、自車が充電ポイントに到着した時に充電設備を確実に利用することができ、待ち時間をなくすことができる。
【0012】
(6) もっとも、前記予約通知部は、前記充電ポイントに予約を入れた後で到着予測時刻通りに到着しない場合には、次の(a)及び(b)のうちの少なくとも1つの処理を行うことが好ましい。
(a) コスト設定部によるコスト設定と経路探索部による探索処理とを再度実行させる第1処理
(b) 充電ポイントに対する予約の変更を行う第2処理
【0013】
上記(a)の第1処理を行うようにすれば、新たな予約状況から推定される自車の到着時における予測待ち時間が改めて待機コストに設定され、その新たな待機コストをリンクコストに含めた中継経路の探索が改めて行われるので、最新の予約状況を考慮した中継経路を搭乗者に提供することができる。
【0014】
上記(b)の第2処理における「予約の変更」には、予約時刻の変更と予約のキャンセルの双方が含まれる。この第2処理を行うようにすれば、例えば、自車が到着予想時刻よりも早く到着することが判明した場合に、充電ポイントを利用する予約時刻を早めたり、逆に自車が到着予想時刻よりも遅く到着することが判明した場合に、予約時刻を遅らせたり或いは予約のキャンセルを行うことにより、充電ポイントの充電設備を効率よく利用できるようになる。
【0015】
(7) 本発明に係る経路探索方法は、本発明に係る経路探索装置が行う方法であって、当該経路探索装置と同様の作用効果を奏する。
(8) 本発明に係るコンピュータプログラムは、本発明に係る経路探索方法の各ステップをコンピュータに実行させるためのプログラムであって、当該経路探索方法と同様の作用効果を奏する。
【発明の効果】
【0016】
以上の通り、本発明によれば、充電ポイントにおける待ち時間が少ない中継経路を電気自動車の搭乗者に提供することができる。
【図面の簡単な説明】
【0017】
【図1】第1実施形態に係る経路探索装置の全体構成を示すブロック図である。
【図2】充電ポイントの待ち時間の統計値に関する参照テーブルの一例を示す図である。
【図3】ディスプレイによる入力設定画面の一例を示す図である。
【図4】車載コンピュータの処理内容を示すフローチャート(前半)である。
【図5】車載コンピュータの処理内容を示すフローチャート(後半)である。
【図6】充電ポイントがある中継地が選択された場合の経路図の一例である。
【図7】第2実施形態に係る経路探索装置の全体構成を示すブロック図である。
【図8】充電ポイントの予約状況に関する参照テーブルの一例を示す図である。
【図9】充電ポイントの満空状況に関する参照テーブルの一例を示す図である。
【発明を実施するための形態】
【0018】
以下、図面を参照しつつ、本発明の実施形態を説明する。
〔第1実施形態〕
〔経路探索装置の全体構成〕
図1は、第1実施形態に係る経路探索装置1の全体構成を示すブロック図である。
この経路探索装置1は、電気自動車(以下、「車両」と略称する場合がある。)20に適した経路探索を行うものであり、その経路探索と車内の各電子機器の動作制御とを行う電子制御装置である車載コンピュータ2を有する。
【0019】
この車載コンピュータ2には、GPS受信機3、車速センサ4、ジャイロセンサ5、記憶装置6、ディスプレイ7、スピーカ8、入力デバイス9、無線通信機10及びバッテリ制御部11がそれぞれ接続されている。
【0020】
上記GPS受信機3、車速センサ4及びジャイロセンサ5は、電気自動車20の走行位置、速度及び向きを把握するセンサ類である。
車載コンピュータ2は、GPS受信機3が定期的に取得するGPS信号により自車の絶対位置を求めるとともに、車速センサ4及びジャイロセンサ5から随時入力される入力信号に基づいてその位置及び方位を補間し、車両20の正確な現在位置及び方位を常に把握している。
【0021】
記憶装置6は、地図データベースを備える。この地図データベースは、車載コンピュータ2に道路地図データを提供するものであり、この道路地図データはリンクデータやノードデータを含み、DVD等の記録媒体に格納されている。なお、この道路地図データには、電気自動車20に給電可能な充電ポイントの位置も含まれている。
記憶装置6は、車載コンピュータ2からの指令に応じて記録媒体から必要な道路地図データを読み出して当該コンピュータ2に提供する。なお、記録媒体としては、DVD以外にも、CD−ROMやメモリカード、ハードディスク等の種々の記録媒体を採用できる。
【0022】
ディスプレイ7とスピーカ8は、車載コンピュータ2が生成した各種情報を車両20の搭乗者に提示するために利用される。具体的には、ディスプレイ7は、経路探索の際の入力設定画面、自車周辺の地図画像及び目的地までの経路情報等を表示し、スピーカ8は、自車を目的地に誘導するためのアナウンスを音声出力する。
なお、本実施形態では、車載コンピュータ2が、探索した経路(後述の直行経路及び中継経路)の走行中に使用可能な電装機器の設定状態を判定するが、判定した設定状態についてもディスプレイ7によって表示される。
【0023】
入力デバイス9は、車両20のドライバが経路探索に関する各種入力を行うためのものである。
具体的には、この入力デバイス9は、操舵ハンドルに設けられた操作スイッチ、ジョイスティック、或いは、ディスプレイ7に設けたタッチパネル等の各種入力手段の組み合わせよりなる。なお、ドライバの音声認識によって入力を受け付ける音声認識装置を入力デバイス9とすることもできる。この入力デバイス9にドライバが行った入力信号は車載コンピュータ2に送られる。
【0024】
無線通信機10は、情報センター23との間の無線通信を介して、当該情報センター23から各種の提供情報を取得するものである。
すなわち、無線通信機10は、車載コンピュータ2の指令により移動体通信網21を利用して情報センター23にアクセスし、渋滞情報等の提供情報が情報センター23から送信されると、この提供情報を受信して車載コンピュータ2に通知する。なお、情報センター23から受ける提供情報には、充電ポイントの待ち時間情報が含まれるが、これについては後述する。
【0025】
車載コンピュータ2は、例えば、各種の制御プログラムを実装したマイクロコンピュータなどの演算処理装置よりなり、その制御プログラムを実行することにより、ディスプレイ7に地図画像を表示させる機能、出発地から目的地までの経路(中継地がある場合はその位置を含む。)を算出する機能、その経路に従って車両20を目的地まで誘導する機能等、各種のナビゲーション機能を実行可能である。
また、本実施形態の車載コンピュータ2は、目的地までの経路が探索された場合に、車両20が現在のバッテリ残容量で到着できるか否かを判定する機能も備えている。
【0026】
車載コンピュータ2は、上記各機能を実現させる所定のコンピュータプログラムをインストールすることによって構成されており、このプログラムは、CD−ROM、DVD−ROMなどの記録媒体に格納して販売又は譲渡することができる。また、このプログラムの販売又は譲渡は、サーバコンピュータからネットワーク経由でダウンロードすることによって行ってもよい。
【0027】
バッテリ制御部11は、車内の通信ケーブルを介して車載コンピュータ2と通信可能に接続されており、自車のバッテリの電力状態を監視しつつ、バッテリの充放電動作を制御する。車載コンピュータ2は、経路探索を行う場合に、バッテリ制御部11から現時点に於けるバッテリ残容量の情報を取得する。
記憶装置6は、自車走行に必要な走行電力を演算するためのデータとして、自車が単位距離(例えば1km)だけ走行する間に、走行駆動源である電動モータにて消費される平均電力量を、例えば一般道走行時や高速道路走行時などの道路種別ごとに記憶している。
【0028】
〔地図データベースの道路地図データ〕
地図データベースの道路地図データは「リンクデータ」と「ノードデータ」を含む。このうち、「ノードデータ」は、交差点IDと交差点位置とを対応付けたデータである。また、「リンクデータ」は、特定リンクのリンクIDに対して、次の情報1)〜4)を対応付けたデータよりなる。
1) 特定リンクの始点・終点・補間点の位置
2) 特定リンクの始点に接続するリンクID
3) 特定リンクの終点に接続するリンクID
4) 特定リンクのリンクコスト
【0029】
また、地図データベースには、地図上の各道路に対応するリンクが一般道路か有料道路かの道路種別や有料道路の場合の通行料金、及び、電気自動車20に給電可能な充電ポイントのステーションIDとその位置も含まれている。
【0030】
上記「リンクコスト」は、例えば、特定リンクとその終点に接続するリンクの組み合わせの数だけ用意されており、特定リンクの始点に進入してから当該特定リンクの終点を退出し、次に接続するリンクの始点に進入するまでに要する「リンク旅行時間」を含む。
すなわち、リンクコストには、特定リンクの始点から終点までを走行するのに要する「リンク通過時間」と、その特定リンクの終点から次のリンクの始点までを走行するのに要する時間コスト、つまり、交差点通過に要する「交差点通過時間」とが含まれる。
【0031】
上記リンク旅行時間は、平日、土曜、日曜及び祝日といった日種別ごとに、現時点から1日先までの5分ごとのデータが用意されており、この5分ごとのデータは、交通情報センターから取得可能なVICS(「VICS」は(財)日本道路交通情報センターの登録商標)情報や、他車両から取得したプローブ情報に基づいて作成される。
なお、本実施形態では、上記リンク旅行時間だけでなく、充電ポイントにおける待ち時間に対応する「待機コスト」も上記リンクコストに含めて設定されるが、その設定方法の詳細については後述する。
【0032】
本実施形態の車載コンピュータ2は、前記制御プログラムの実行によって実現される機能実現部として、コスト設定部2Aと経路探索部2Bとを備えている。
このうち、コスト設定部2Aは、経路探索部2Bが充電ポイントを経由する中継経路を探索する場合において、充電ポイントにおいて電気自動車20の充電を開始するまでの待ち時間に対応する「待機コスト」を設定する機能を有する。また、経路探索部2Bは、設定された待機コストをリンクコストに含めて中継経路を探索する機能を有する。
【0033】
なお、経路探索部2Bが探索した最適な中継経路は、ディスプレイ7に出力されてその画面に表示され、これによって当該中継経路が搭乗者に提供される。
経路探索部2Bを構成するコンピュータプログラムには、具体的にはダイクストラ法やポテンシャル法による経路探索ロジックが含まれている。すなわち、本実施形態の経路探索部2Bは、上記経路探索ロジックを含むプログラムを実行することで出発地から目的地までのリンクコストの累計が最小となる推奨経路を探索することができる。
【0034】
ここで、ダイクストラ法では、探索開始リンクから始まるリンクのツリーを構成していくに当たって、あるリンクから複数のリンクに枝分かれする場合に、各枝のリンクの経路コスト(探索開始リンクから当該リンクに至るリンクコストの総和)の大小を比較し、この経路コストの小さい順に並べ変えて、経路コストの小さいリンクからさらに探索を続けて行くという方法を採用している。
従って、最初に探索終了リンクに到達すれば、その時点で探索終了リンクに到達する最小コストの経路が決定される。リンクコストの小さいリンクから順に探索を行うので、真先に探索終了リンクに到達した経路がそのまま最小コストの経路となるからである。
【0035】
一方、ポテンシャル法では、あるリンクから複数のリンクに枝分かれする場合に、各枝のリンクの経路コストの大小の比較をせずに、すべてのリンクを同等に扱い、各枝のリンクからさらに探索を続けていくという方法を採用している。
従って、最初に探索終了リンクに到達しても、その時点では、他の経路を通って探索終了リンクに到達する可能性が残されているため、ネットワークにあるすべてのリンクを探索し終わった時点で初めて、探索終了リンクに到達する最小コストの経路が決定される。
【0036】
〔情報センター〕
図1に示すように、情報センター23は、無線通信機24とセンターコンピュータ25と記憶装置26とを備えている。無線通信機24は、移動体通信網21を介して各車両20の無線通信機10や、日本全国或いは所定地域の充電ポイントに設けられた通信装置(図示せず)と通信可能となっている。
センターコンピュータ25は、充電ポイントにおいて過去に発生した時間帯ごとの待ち時間を、各充電ポイントからそれぞれ収集している。
【0037】
なお、本実施形態では、各充電ポイントから収集される「待ち時間」は、充電ポイントに到着してから電気自動車20の充電を開始するまでに要する待ち時間(以下、「開始待ち時間」ということがある。)のことである。
【0038】
センターコンピュータ25は、各充電ポイントの待ち時間データの統計値(例えば、平均値や中央値)を、平日、土曜、日曜及び祝日といった日種別の時間帯ごとに区分し、参照テーブル22Aに纏めて記憶装置26に記憶させている。図2はその参照テーブル22Aの一例を示す図である。
図2に示すように、この参照テーブル22Aは日種別のテーブル群よりなり、特定の日の各テーブルには、充電ポイントを識別するステーション番号ごとに、1日を所定時間(図例では3時間)で区分した時間帯ごとの開始待ち時間の統計値が記されている。
【0039】
図2に例示する参照テーブル22Aによれば、例えば、ステーション番号が「1」の充電ポイントにおける開始待ち時間の統計値は、0時〜3時では「0」(単位は時間、以下同様。)、3時〜6時では「0」、6時〜9時では「0.1」、9時〜12時では「0.5」、12時〜15時では「1.5」となっている。
また、ステーション番号が「2」の充電ポイントにおける開始待ち時間の統計値は、0時〜3時では「0」、3時〜6時では「0」、6時〜9時では「0.2」、9時〜12時では「1.0」、12時〜15時では「0.5」となっている。
【0040】
センターコンピュータ25は、記憶装置26に格納された上記参照テーブル22Aを、所定期間ごとにダウンリンク情報に含めて電気自動車20に配信する。これを受信した電気自動車20の車載コンピュータ2は、ダウンリンク情報から参照テーブル22Aを抽出して自車の記憶装置6に格納する。
なお、図2の参照テーブル22Aは、過去の開始待ち時間の統計値をテーブル化したものであるから、必ずしもセンターコンピュータ25が自動配信する必要はない。
【0041】
例えば、情報センター23のウェブサイトに参照テーブル22Aが公開されている場合には、それを欲する搭乗者がインターネットを通じて参照テーブル22Aをダウンロードして、記憶装置6に格納することにしてもよい。
また、車両20の車載コンピュータ2が各充電ポイントからデータ収集することで、各々の車両20が自律的に参照テーブル22Aを作成し、自車の記憶装置6に記憶させことにしてもよい。
【0042】
〔ディスプレイの入力設定画面〕
図3は、ディスプレイ7による入力設定画面の一例を示す図である。
図3に示すように、ディスプレイ7の入力画面には、出発地と目的地の「位置入力アイコン」と、高速優先、時間優先又は料金優先のいずれかを1つを選択する「優先設定アイコン」と、充電ポイントを経由する中継経路の探索を行うか否かを選択するための「探索種別アイコン」とが表示されている。
【0043】
本実施形態の車載コンピュータ2は、車両20の搭乗者が「探索種別アイコン」の右側にある「充電ポイントあり」を選択すると、充電ポイントを経由する「中継経路」を含む経路を探索し、「充電ポイントなし」を選択すると、充電ポイントを経由せずに目的地に直行する「直行経路」のみの探索を行うようになっている。
【0044】
〔車載コンピュータの処理内容〕
図4及び図5は、車載コンピュータ2の処理内容を示すフローチャートである。
以下、このフローチャートを参照しつつ、第1実施形態において車載コンピュータ2が行う電気自動車20のための経路探索方法を説明する。
<直行経路の探索処理>
図4に示すように、車載コンピュータ2の経路探索部2Bは、まず、ディスプレイ7の入力操作画面にて搭乗者が入力した出発地と目的地を読み込む(ステップST1)。
【0045】
なお、上記入力操作画面にて搭乗者が「出発地」を入力しない場合には、GPS受信機3によって得られた「現在位置」が出発地として設定される。
その後、経路探索部2Bは、上記出発地から目的地までを、充電せずに車両20が直行する場合のリンクコストが最小となる「直行経路」を、ダイクストラ法やポテンシャル法等の所定の経路探索ロジックによって探索する(ステップST2)。
【0046】
すなわち、経路探索部2Bは、出発地に最も近いリンク又はノードを探索開始リンクとし、目的地に最も近いリンクを探索終了リンクとして、前記リンクデータの中から、探索開始リンクから探索終了リンクまでを含むネットワークデータを記憶装置6の地図データベースから取得し、このネットワークデータに対して経路探索ロジックを実行する。
より具体的には、探索開始リンクから探索終了リンクに至るリンクを順次加算してリンクのツリーを構成して行き、探索終了リンクに至るツリーの中で、次の式(1)で定義されるリンクコストの累計が最も少ない直行経路を、ダイクストラ法又はポテンシャル法による経路探索ロジックにより求める。
【0047】
リンクコスト= (a×リンク旅行時間)
+(b×リンクの距離)
+(c×道路種別)
+(d×通行料金)
+(e×交差点通過時間)
+(f×待機コスト) ………(1)
【0048】
なお、上記式(1)におけるa〜fは、ルート計算種別ごとに設定される係数であり、充電ポイントを経由しない「直行経路」を探索する図4のステップST2の場合には、コスト設定部2Aにより待機コストの係数が「0」に設定される。
【0049】
次に、車載コンピュータ2の経路探索部2Bは、現時点のバッテリ残容量Woを読み込むとともに(ステップST3)、上記直行経路を目的地まで走破するのに必要な走行電力Wrを算出する(ステップST4)。
この走行電力Wrは、電動モータにより消費される単位距離当たりの平均電力量に、直行経路の累積距離を乗算することによって算出することができる。
【0050】
その後、経路探索部2Bは、バッテリ残容量Woが走行電力Wr以上であるか否かを判定し(ステップST5)、この判定結果が肯定的である場合には、探索結果である直行経路をディスプレイ7に出力する(ステップST6)。
これに対して、その判定結果が否定的、すなわち、バッテリ残容量Woが走行電力Wr未満には、探索した直行経路では目的地に到着できないので、図5に示す中継経路の探索処理に移行する。
【0051】
なお、図3に示す入力操作画面において、ユーザ(車両20の搭乗者)が「探索種別」として「充電ポイントなし」を選択した場合には、ステップST5の判定結果が否定的である場合でも図5の探索処理に移行せず、出発地まで到着可能な直行経路がない旨がディスプレイ7によって表示される。
【0052】
<中継経路の探索処理>
図5に示す中継経路の探索処理では、車載コンピュータ2の経路探索部2Bが、まず充電ポイントのある中継地を選択する(ステップST6)。
なお、この選択処理は、例えば、前記直行経路に含まれるリンクノードを中心として所定の半径(例えば、10km)以内にある充電ポイントを逐次検出することによって行うことができる。
【0053】
次に、車載コンピュータ2のコスト設定部2Aが、選択された1又は複数の充電ポイントについて待機コストの設定を行う(ステップST8)。
図6は、充電ポイントがある中継地P1,P2が選択された場合の経路図の一例を示している。この例では、ステップST7において2つの中継地P1,P2が選択されたものとし、中継地P1,P2の経由を条件とした次の2種類のルートを想定している。
(a) Ps→P1→Pd
(b) Ps→P2→Pd
【0054】
また、中継地P1が図2のステーション番号1であり、中継地P1への到達予測時刻が12:30であるとし、中継地P2が図2のステーション番号2であり、中継地P2への到着予測時刻が13:30であると仮定する。
この場合、図2の参照テーブル22Aによれば、上記の各到着予測時刻はいずれも12時〜15時の時間帯に含まれている。
【0055】
そこで、車載コンピュータ2のコスト設定部2Aは、図2の参照テーブル22A中のデータ(開始待ち時間の統計値)の中から、ステーション番号が「1」でかつ12時〜15時の時間帯に含まれる「1.5」と、ステーション番号が「2」でかつ12時〜15時に時間帯に含まれる「0.5」を抽出し、これらのデータ値をリンクコストの累計式である前記式(1)の「待機コスト」に設定する。
【0056】
その後、車載コンピュータ2の経路探索部2Bは、設定された上記待機コストを用いて、中継地P1,P2を経由して目的地Pdに向かう場合にリンクコストが最小となる「中継経路」を、前記所定の探索ロジックによって探索する(ステップST9)。
すなわち、経路探索部2Bは、P1経由を条件とするルート(a)の場合は式(1)の待機コストを「1.5」とし、P2経由を条件とするルート(b)については、式(1)の待機コストを「0.5」として、探索終了リンクに至るツリーの中で、式(1)で定義されるリンクコストの累計が最も少ない中継経路を、ダイクストラ法又はポテンシャル法による経路探索ロジックにより求める。
【0057】
次に、経路探索部2Bは、特定された最適な中継経路を目的地Pdまで走破するのに必要な走行電力Wr(j)を、その中継経路を構成する区間ごとに算出する(ステップST10)。
ここで、ステップST10の「j」は、図6における各区間に割り当てた区間番号を示し、図6の例では、Ps〜P1の区間をj=1、P1〜Pdの区間をj=2、Ps〜P2の区間をj=3、P2〜Pdの区間をj=4としている。
【0058】
例えば、最適なものとして特定された中継経路がPs→P2→Pdのルート(b)であったとすると、経路探索部2Bは、電動モータにより消費される単位距離当たりの平均電力量に、区間番号j=3と区間番号i=4の各区間の累積距離を乗算することにより、その区間ごとの走行電力Wr(3),Wr(4)を算出する。
【0059】
次に、経路探索部2Bは、現時点のバッテリ残容量W0或いは充電後のバッテリ容量Wmaxが、各区間の走行電力Wr(j)以上か否かを判定する(ステップST11)。
なお、ステップST11における{W0,Wmax}は、区間の始点が出発地Psである区間番号jの場合は、現時点のバッテリ残容量W0を適用し、区間の始点が中継地P1,P2である区間番号jの場合は、充電後のバッテリ残容量Wmaxを適用することを意味する。
【0060】
従って、特定された中継経路が上記ルート(b)であるとすると、経路探索部2Bは、現時点のバッテリ残容量Woが走行電力W(3)以上であるか否かを判定し、充電後のバッテリ残容量Wmaxが走行電力W(4)以上であるか否かを判定することになる。
なお、充電後のバッテリ残容量Wmaxは、必ずしもフル充電の場合のバッテリ残容量でなくてもよく、所定距離(例えば、50km)の航続距離を確保できる分の容量であってもよい。
【0061】
経路探索部2Bは、上記の判定結果が肯定的である場合には、探索結果である中継経路をディスプレイ7に出力し(ステップST12)、この経路はディスプレイ7の画面表示によって搭乗者に提供される。
一方、経路探索部2Bは、その判定結果が否定的、すなわち、バッテリ残容量Woが走行電力W(3)未満或いは充電後のバッテリ容量Wmaxが走行電力W(4)未満である場合には、探索結果の中継経路では目的地Pdに到着できないので、直行経路の場合も含めて、目的地Pdに到着可能な経路がない旨の出力を行う(ステップST13)。
【0062】
上述の通り、第1実施形態の経路探索装置1によれば、車載コンピュータ2のコスト設定部2Aが、充電ポイント(中継地点P1,P2)における過去の開始待ち時間の統計値を待機コストとして設定し、同コンピュータ2の経路探索部2Bが、設定された待機コストをリンクコストに含めて中継経路を探索するので、充電開始までの待ち時間ができるだけ少ない中継経路を探索することができる。
このため、探索された中継経路をディスプレイ7によって搭乗者に提供することにより、充電開始までの待ち時間が少ない或いは待ち時間なしの中継経路を搭乗者に対して事前に案内することができる。
【0063】
また、第1実施形態の経路探索装置1によれば、コスト設定部2Aが、充電ポイントにおける過去の開始待ち時間の統計値を待機コストとして設定するので、後述の第2実施形態のように、到着時における予測待ち時間を求める場合に必要となる、充電ポイントの現時点の予約状況を情報収集しなくても、比較的正確なコスト設定を行うことができる。
従って、充電ポイントでの待機コストを考慮した中継経路を探索する経路探索装置1を簡便かつ安価に実現できるという利点がある。
【0064】
なお、中継経路の探索の場合に用いる「待機コスト」には、電気自動車20の充電を開始するまでの「開始待ち時間」に加えて、充電ポイントで行う充電に必要な「充電時間」を含めることにしてもよい。
この「充電時間」は、充電開始時におけるバッテリ残存量や、フル充電を行うか否かによって変動するが、例えば、1回の充電にかける充電時間を予め設定値として固定しておけば、その設定値を開始待ち時間に加算することにより、充電ポイントにおける充電終了までの待ち時間に対応する待機コストを設定することができる。
【0065】
〔第2実施形態〕
図7は、第2実施形態に係る経路探索装置1の全体構成を示すブロック図である。また、図8は、第2実施形態の経路探索装置1が使用する、充電ポイントの予約状況に関する参照テーブル22Bの一例を示す図である。
本実施形態の経路探索装置1では、センターコンピュータ25が、各充電ポイントの過去の開始待ち時間の統計値ではなく、例えば図8に示すような、現時点の予約状況に関する参照テーブル22Bをほぼリアルタイムに生成することを前提としている。
【0066】
すなわち、センターコンピュータ25は、充電ポイントが予約で詰まっているか或いは利用可能かについての予約情報を、当該ポイントに設置されたサーバコンピュータから所定時間(例えば5分)ごとに取得しており、取得した予約情報に基づいて、現時点以降に利用可能な時間帯と利用不能な時間帯を充電ポイントごとにデーブル化して、図8の参照テーブル22Bを更新している。
なお、センターコンピュータ25は、更新した参照テーブル22Bを含むダウンリンク情報を各車両20に配信し、そのダウンリンク情報を受信した車両20の車載コンピュータ2は、自車の記憶装置6に当該参照テーブル22Bを記憶させる。
【0067】
図8に例示する参照テーブル22Bにおいて、斜線部分は使用中又は予約ありのために利用不能な時間帯を示し、空白部分はそれ以外の利用可能な時間帯を示している。
従って、例えば、ステーション番号が「1」の充電ポイントでは、現時点から13:00までの時間帯が利用不能であり、13:00以後が利用可能な時間帯となっている。また、ステーション番号が「2」の充電ポイントでは、13:00〜14:30までの時間帯が利用不能であり、それ以外の時間帯が利用可能な時間帯となっている。
【0068】
本実施形態の経路探索装置1では、図5に示す待機コストの設定(ステップST8)において、車載コンピュータ2のコスト設定部2Aが、上記参照テーブル22Aの予約状況と中継地P1,P2への到着予測時刻とから、その中継地P1,P2における予測待ち時間を算出し、この待ち時間を式(1)のリンクコストの待機コストとして採用する。
例えば、ステーション番号が「1」の充電ポイント(中継地)P1への到着予測時刻が12:30であるとすると、コスト設定部2Aは、その中継地P1での予測待ち時間である30分を開始待ち時間に対応する待機コストに設定する。
【0069】
また、ステーション番号が「2」の充電ポイント(中継地)P2への到着予測時刻が13:00であるとすると、コスト設定部2Aは、その中継地P1での予測待ち時間である90分を開始待ち時間に対応する待機コストに設定する。
このように、第2実施形態の経路探索装置1では、コスト設定部2Aが、充電ポイントP1,P2において電気自動車20の充電を開始するまでの開始待ち時間に対応する待機コストとして、充電ポイントP1,P2の現時点の予約状況から推定される自車の到着時における予測待ち時間を用いる。
【0070】
なお、車載コンピュータ2の経路探索部2Bは、上記のようにしてコスト設定部2Aが設定した待機コストを用いて、式(1)のリンクコストが最小となる中継経路を探索するが、この点は第1実施形態の場合と同様である。また、この第2実施形態においても、充電時間を待機コストに含めることにしてもよい。
第2実施形態の経路探索装置1によれば、経路探索部2Bが、現時点の予約状況から推定される自車の到着時における予測待ち時間に基づいて設定された待機コストを、リンクコストに含めて中継経路を探索するので、到着時における待ち時間が確実に少ない充電ポイントを含む中継経路を、より正確に探索することができる。
【0071】
〔予約通知部について〕
ところで、第2実施形態の経路探索装置1では、充電ポイントの現時点の予約状況を示す図8の参照テーブル22Bを車両20が把握していることから、充電ポイントが空きの場合に自動的に予約を入れる予約通知部2C(図7参照)が車載コンピュータ2に設けられている。
すなわち、この予約通知部2Cは、探索された中継経路で経由する充電ポイントの到着予測時刻に当該充電ポイントが空きの場合に、無線通信機10を通じて充電ポイントに予約を入れる処理を実行する。
【0072】
もっとも、上記のように車両20が充電ポイントに自動的に予約を入れるシステムにすると、例えば、予約を入れた車両20が到着予測時刻よりも早く到着した場合には、予想以上の待ち時間となる恐れがあり、逆に到着予測時刻よりも遅く到着した場合には、充電ポイントの事業者に迷惑をかけることになる。
そこで、充電ポイントに予約を入れた後で到着予測時刻通りに到着しないことが判明した場合には、充電ポイントに対する予約を変更する処理を、予約通知部2Cが行うようにすることが好ましい。
【0073】
この処理を行うようにすれば、例えば、自車が到着予想時刻よりも早く到着することが判明した場合に、充電ポイントを利用する予約時刻を早めたり、逆に自車が到着予想時刻よりも遅く到着することが判明した場合に、予約時刻を遅らせたり或いは予約のキャンセルを行うことにより、充電ポイントの充電設備を効率よく利用できるようになる。
このように、予約通知部2Cが行う予約の変更には、予約時刻の変更だけでなく、予約のキャンセルが含まれていてもよい。
【0074】
また、充電ポイントに予約を入れた後で到着予測時刻通りに到着しないことが判明した場合には、コスト設定部2Aによるコスト設定と経路探索部2Bによる探索処理とを再度実行させる処理を、予約通知部2Cに行わせることにしてもよい。
この場合、コスト設定部2Aが、最新の予約状況(図8)から推定される自車の到着時における予測待ち時間を改めて待機コストとして設定し、経路探索部2Bが、その待機コストをリンクコストに含めて中継経路を探索するので、最新の予約状況を考慮した中継経路を搭乗者に提供することができる。
【0075】
〔予測待ち時間の別の算出例〕
なお、第2実施形態において、到着予測時刻における「予測待ち時間」は、充電ポイントが利用不能である1つの時間帯だけでなく、利用不能な時間帯で挟まれる空き時間の長さも考慮に入れて算出することが好ましい。
例えば図8に示すように、ステーション番号が「3」の充電ポイントでは、12:00〜13:00までの時間帯と、13:15〜14:00までの時間帯とに、既に予約が入っているものとする。
【0076】
また、上記充電ポイントへの自車の到着予測時刻が12:30であり、この車両20の充電時間は少なくとも60分必要であるとする。
この場合、到着予測時刻(12:30)からその次の空き時刻(13:00)までを一律に予測待ち時間とすると、待機コストを「30分」とした上で、13:00〜13:15までの15分間だけ充電を行うことになるが、これでは、当該車両20に必要な充電時間(60分)以下の極めて短い時間でしか充電できない。
【0077】
そこで、利用不能な1つの時間帯と次の利用不能な時間帯との間の空き時間が、充電時間(60分)未満である場合には、それらの時間帯を一連の時間帯と見なして、予測待ち時間を算出することが好ましい。
すなわち、図8のステーション番号「3」の場合には、到着予測時刻(12:30)の直後の空き時刻(13:00)ではなく、その次の空き時刻(14:00)までの「90分」を予測待ち時間とする。
【0078】
上記のように、自車の充電に必要な充電時間以下の空き時間は空いていないと見なして予測待ち時間を算出することにより、必要な充電時間未満の極めて短い時間での充電を強いられる事態を未然に回避することができ、自車に必要な予測待ち時間を正確に算出できるようになる。
【0079】
また、例えば図8に示すステーション番号が「2」の充電ポイントにおいて、自車の到着予測時刻が12:45である場合には、その時点では空きであっても、13:00以後の予約が既に入っているために、充電時間未満の15分しか充電できないことになる。
そこで、自車の到着予測時刻においては充電ポイントが空きの時間帯であっても、それだけで、充電ポイントを一律に空きと判断して開始待ち時間をゼロとするのではなく、その時刻から次の予約開始時刻までの時間が充電時間未満の短い時間である場合には、充電ポイントが空いていないと見なして予測待ち時間を算出することが好ましい。
【0080】
図8のステーション番号が「2」の場合には、到着予測時刻(12:45)以後の次の予約の終了時刻が14:30であるから、12:45から14:30までの105分が予測待ち時間として設定されることになる。
【0081】
〔第3実施形態〕
図9は、充電ポイントの満空状況に関する参照テーブル22Cの一例を示す図である。 この参照テーブル22Cにおいて、「○」はそのステーション番号の充電ポイントが空いていることを意味し、「×」はそのステーション番号の充電ポイントが満員で利用できないことを示している。
【0082】
この場合、コスト設定部2Aが、「○」の充電ポイントについては待機コストを比較的小さく設定し、「×」の充電ポイントについては待機コストを比較的大きめに設定することにより、充電ポイントにおいて電気自動車20の充電を開始するまでの待ち時間に対応する待機コストを設定することができる。
もっとも、図9のような現時点の満空状況を採用すると、待機コストの設定処理を単純化できる利点があるが、自車が充電ポイントに到着するまでに比較的長い時間を要する場合には、現時点で空きの充電ポイントが自車の到着時には空いていない恐れがある。
【0083】
従って、中継地に到着した際の待ち時間をできるだけなくす観点からすると、第2実施形態のように、現時点の予約状況(図8)に基づく正確な予測待ち時間を待機コストとして設定することが好ましい。
【0084】
〔その他の変形例〕
上述の各実施形態は例示であって制限的なものではない。本発明の権利範囲は特許請求の範囲によって示され、そこに記載された構成と均等の範囲内のすべての変更は、本発明の権利範囲に包含される。
例えば、上述の実施形態では、電気自動車20の車載コンピュータ2が本発明の経路探索を行っているが、情報センター23のセンターコンピュータ25にて本発明の経路探索を行い、その結果を電気自動車20に通知するようにしてもよい。
【符号の説明】
【0085】
1 経路探索装置
2 車載コンピュータ
2A コスト設定部
2B 経路探索部
2C 予約通知部
7 ディスプレイ
【特許請求の範囲】
【請求項1】
充電ポイントのある中継地を経由して目的地に向かう中継経路を探索する経路探索装置であって、
前記充電ポイントにおける待ち時間に対応する待機コストを設定するコスト設定部と、
設定された前記待機コストをリンクコストに含めて前記中継経路を探索する経路探索部と、を備えていることを特徴とする経路探索装置。
【請求項2】
前記コスト設定部は、前記充電ポイントにおける過去の待ち時間の統計値に基づいて前記待機コストを設定する請求項1に記載の経路探索装置。
【請求項3】
前記コスト設定部は、前記充電ポイントにおける現時点の満空状況に基づいて前記待機コストを設定する請求項1に記載の経路探索装置。
【請求項4】
前記コスト設定部は、前記充電ポイントの現時点の予約状況から推定される自車の到着時における予測待ち時間に基づいて前記待機コストを設定する請求項1に記載の経路探索装置。
【請求項5】
探索された前記中継経路で経由する前記充電ポイントの到着予測時刻に当該充電ポイントが空きの場合に、その充電ポイントに予約を入れる予約通知部を更に備えている請求項4に記載の経路探索装置。
【請求項6】
前記予約通知部は、前記充電ポイントに予約を入れた後で自車が到着予測時刻通りに到着しない場合に、次の(a)及び(b)のうちの少なくとも1つの処理を行う請求項5に記載の経路探索装置。
(a) コスト設定部によるコスト設定と経路探索部による探索処理とを再度実行させる第1処理
(b) 充電ポイントに対する予約を変更する第2処理
【請求項7】
充電ポイントのある中継地を経由して目的地に向かう中継経路を探索する経路探索方法であって、
前記充電ポイントにおける待ち時間に対応する待機コストを設定するステップと、
設定された前記待機コストをリンクコストに含めて前記中継経路を探索するステップと、を含むことを特徴とする経路探索方法。
【請求項8】
請求項7に記載の経路探索方法の各ステップをコンピュータに実行させるためのコンピュータプログラム。
【請求項1】
充電ポイントのある中継地を経由して目的地に向かう中継経路を探索する経路探索装置であって、
前記充電ポイントにおける待ち時間に対応する待機コストを設定するコスト設定部と、
設定された前記待機コストをリンクコストに含めて前記中継経路を探索する経路探索部と、を備えていることを特徴とする経路探索装置。
【請求項2】
前記コスト設定部は、前記充電ポイントにおける過去の待ち時間の統計値に基づいて前記待機コストを設定する請求項1に記載の経路探索装置。
【請求項3】
前記コスト設定部は、前記充電ポイントにおける現時点の満空状況に基づいて前記待機コストを設定する請求項1に記載の経路探索装置。
【請求項4】
前記コスト設定部は、前記充電ポイントの現時点の予約状況から推定される自車の到着時における予測待ち時間に基づいて前記待機コストを設定する請求項1に記載の経路探索装置。
【請求項5】
探索された前記中継経路で経由する前記充電ポイントの到着予測時刻に当該充電ポイントが空きの場合に、その充電ポイントに予約を入れる予約通知部を更に備えている請求項4に記載の経路探索装置。
【請求項6】
前記予約通知部は、前記充電ポイントに予約を入れた後で自車が到着予測時刻通りに到着しない場合に、次の(a)及び(b)のうちの少なくとも1つの処理を行う請求項5に記載の経路探索装置。
(a) コスト設定部によるコスト設定と経路探索部による探索処理とを再度実行させる第1処理
(b) 充電ポイントに対する予約を変更する第2処理
【請求項7】
充電ポイントのある中継地を経由して目的地に向かう中継経路を探索する経路探索方法であって、
前記充電ポイントにおける待ち時間に対応する待機コストを設定するステップと、
設定された前記待機コストをリンクコストに含めて前記中継経路を探索するステップと、を含むことを特徴とする経路探索方法。
【請求項8】
請求項7に記載の経路探索方法の各ステップをコンピュータに実行させるためのコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−137420(P2012−137420A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−290869(P2010−290869)
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月27日(2010.12.27)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]