
経路探索装置、経路探索方法及び経路探索プログラム
【課題】走行時に回生エネルギを発生可能な車両に対して、エネルギの推定消費量を少なくすることを優先条件とした経路を提供することができる経路探索装置、経路探索方法及び経路探索プログラムを提供する。
【解決手段】サーバー装置のサーバー制御装置は、車両の駆動方式を取得し(ステップS20:YES)、目的地までの走行に伴う車両における化石燃料の推定消費量を少なくすることを優先条件としてルート候補を探索する(ステップS21)。サーバー制御装置は、複数のルート候補が探索された場合(ステップS22:YES)、車両で回生エネルギを発生させやすい推奨道路特性を取得し、該推奨道路特性に基づき各ルート候補のうち何れか一つのルート候補を選択し、該ルート候補を目的地までのエコルートとして提供する(ステップS25,S26,S27,S28)。
【解決手段】サーバー装置のサーバー制御装置は、車両の駆動方式を取得し(ステップS20:YES)、目的地までの走行に伴う車両における化石燃料の推定消費量を少なくすることを優先条件としてルート候補を探索する(ステップS21)。サーバー制御装置は、複数のルート候補が探索された場合(ステップS22:YES)、車両で回生エネルギを発生させやすい推奨道路特性を取得し、該推奨道路特性に基づき各ルート候補のうち何れか一つのルート候補を選択し、該ルート候補を目的地までのエコルートとして提供する(ステップS25,S26,S27,S28)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の現在位置から目的地までの経路を探索する経路探索装置、経路探索方法及び経路探索プログラムに関する。
【背景技術】
【0002】
一般に、この種の経路探索装置として、目的地までの経路を探索し、該探索した経路を車両の乗員に案内するナビゲーション装置が知られている。こうしたナビゲーション装置では、車両の乗員によって設定された優先条件(例えば、所要時間、走行距離、燃料の消費量)に基づき、経路探索が行われる。例えば、優先条件として燃料の消費量が設定された場合には、リンク(道路区間)毎の車両の平均速度に基づきリンク毎の燃料の推定消費量が算出される。そして、推定消費量の総和が最少となるリンクを繋いだ経路が探索され、該経路がエコルートとして車両の乗員に案内される。なお、ここでいう「エコルート」とは、エネルギの消費効率のよい経路のことを示している。
【0003】
また、ナビゲーション装置としては、目的地まで車両を走行させる際の希望予算を車両の乗員に入力させ、該入力された希望予算の範囲内で車両を目的地に到着させることが可能な経路を探索する装置も知られている(特許文献1参照)。なお、「希望予算」には、目的地まで車両を走行させる際に使用される燃料の予算、及び有料道路を利用する際にはその料金などを含んでいる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−275869号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年では、バッテリに蓄電された電力エネルギに基づいたモータの駆動によって走行可能なハイブリッド車両及び電気自動車が普及しつつある。こうした車両では、該車両の減速時に回生エネルギが発生し、該回生エネルギがバッテリに蓄電される。すなわち、車両走行中に、車両を走行させる際に必要な電力エネルギが蓄えられる。このように走行時にバッテリに蓄電される電力エネルギ量は、車両の駆動方式(前輪駆動又は後輪駆動)によって異なる。そのため、回生エネルギを発生可能な車両に対して上記エコルートを探索する場合には、目的地までの間で車両が発生し得る回生エネルギの発生量を、車両の駆動方式に応じて推定し、該回生エネルギの発生量を考慮したエコルートを探索する必要がある。
【0006】
本発明は、このような事情に鑑みてなされたものであり、その目的は、走行時に回生エネルギを発生可能な車両に対して、エネルギの推定消費量を少なくすることを優先条件とした経路を提供することができる経路探索装置、経路探索方法及び経路探索プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索する経路探索装置であって、目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索する経路探索手段と、前記車両の駆動方式を取得する方式取得手段と、前記方式取得手段によって取得された前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得する特性取得手段と、前記経路探索手段によって複数の経路候補が探索された場合に、前記特性取得手段によって取得された推奨道路特性に基づき前記各経路候補のうち何れか一つの経路候補を目的地までの経路として選択し、該経路を提供する経路提供手段と、を備えることを要旨とする。
【0008】
車両走行時に発生する回生エネルギは、車載のバッテリに蓄電させておくことにより、車両の走行に利用することができる。すなわち、車両でのエネルギの推定消費量が同程度となる経路候補が複数存在する場合には、回生エネルギを最も発生させやすい経路候補がエコルートとして相応しい。そこで、本発明では、目的地までの走行に伴う車両におけるエネルギの推定消費量を少なくすることを優先条件として探索された経路候補が複数存在する場合には、車両の駆動方式に基づき、車両で回生エネルギを発生させやすい推奨道路特性が取得される。これは、車両の駆動方式によって、回生エネルギの発生させやすい推奨道路特性が異なることがあるためである。そして、取得された推奨道路特性に基づき、各経路候補のうち何れか一つの経路候補が選択され、該経路候補が目的地までの経路として車両の乗員に提供される。したがって、走行時に回生エネルギを発生可能な車両に対して、エネルギの推定消費量を少なくすることを優先条件とした経路を提供することができる。
【0009】
本発明の経路探索装置は、前記経路探索手段によって探索された経路候補を前記車両に走行させた場合における該車両の平均速度の推定値を取得する速度推定手段をさらに備え、前記特性取得手段は、前記方式取得手段によって車両が後輪駆動であることが取得された場合には、車両の平均速度の推定値が速いという特性を前記推奨道路特性として取得し、前記経路提供手段は、前記方式取得手段によって車両が後輪駆動であることが取得されると共に、前記経路探索手段によって複数の経路候補が探索された場合には、前記特性取得手段によって取得された前記推奨道路特性に基づき、当該各経路候補のうち、前記速度推定手段によって取得された平均速度の推定値が最も速い経路候補を目的地までの経路として選択する。
【0010】
駆動方式が後輪駆動となる後輪駆動車では、駆動輪である後輪に回生制動力が付与される。一方、駆動方式が前輪駆動となる前輪駆動車では、駆動輪である前輪に回生制動力が付与される。また、車両に搭載されるブレーキ装置は、一般的に、車両の車体速度に応じて、前輪と後輪との制動力配分を異ならせている。例えば、高速走行時に各車輪に制動力を付与する場合は、低速走行時に各車輪に制動力を付与する場合よりも、後輪に対する制動力の配分を多くする。言い換えると、後輪駆動車では、高速で走行する機会が多いほど、回生エネルギの発生量が多くなると推定される。
【0011】
そこで、本発明では、車両でのエネルギの推定消費量が同程度となる経路候補が複数存在する場合において車両が後輪駆動車であるときには、各経路候補を車両に走行させた場合における該車両の平均速度が推定される。そして、推定された平均速度が最も速い経路候補が、目的地までの経路として車両の乗員に提供される。したがって、車両が後輪駆動車である場合には、その制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0012】
本発明の経路探索装置において、前記速度推定手段は、前記経路探索手段によって複数の経路候補が探索された場合に、前記各経路候補のうち一の経路候補において他の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得し、前記他の経路候補において前記一の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得する。
【0013】
回生エネルギを発生させやすい経路であるか否かを判断する観点から考えると、一の経路候補において他の経路候補と重複する道路区間での平均速度を推定することの意味は余りない。そこで、本発明では、一の経路候補において他の経路候補と重複しない道路区間での平均速度が推定されると共に、他の経路候補において一の経路候補と重複しない道路区間での平均速度が推定される。そして、このように算出された各経路候補の平均速度に基づき、エコルートが選択される。そのため、車両の制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0014】
本発明の経路探索装置は、前記経路探索手段によって探索された経路候補において、前記車両の車輪に制動力が付与され得る減速要因がある道路区間を抽出する減速区間抽出手段をさらに備え、前記速度推定手段は、前記減速区間抽出手段によって抽出された道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得する。
【0015】
回生エネルギは、車両の車輪に回生制動力が付与された場合に発生するエネルギである。そのため、車両に制動力を付与して該車両を減速させる機会の少ない道路区間は、回生エネルギが発生しにくい道路区間であるということができる。そこで、本発明では、探索された経路候補において減速要因がある道路区間が抽出される。そして、抽出された道路区間での平均速度が推定される。そのため、回生エネルギが発生される可能性が高い道路区間での平均速度に基づいたエコルートを車両の乗員に提供することができる。
【0016】
本発明の経路探索装置は、地図上の道路を構成する複数の道路区間と、それらの道路区間を車両が走行した際におけるエネルギの推定消費量とを関連付けて記憶する道路区間記憶手段をさらに備え、前記経路探索手段は、前記優先条件に基づいて前記道路区間記憶手段に記憶される各道路区間を繋ぐことにより、経路候補を生成する。
【0017】
上記構成によれば、道路区間記憶手段に記憶される情報に基づき、エネルギの推定消費量が少ない経路候補が探索される。すなわち、道路区間記憶手段に記憶される各道路区間でのエネルギの推定消費量の正確性が高いほど、エコルートの探索精度を向上させることができる。
【0018】
本発明は、減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索させるための経路探索方法であって、目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、前記車両の駆動方式を取得させる方式取得ステップと、前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を有することを要旨とする。
【0019】
上記構成によれば、上記経路探索装置と同等の作用・効果を得ることができる。
本発明は、減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路の探索を制御装置に実行させるための経路探索プログラムであって、前記制御装置に、目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、前記車両の駆動方式を取得させる方式取得ステップと、前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を実行させることを要旨とする。
【0020】
上記構成によれば、上記経路探索装置と同等の作用・効果を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の経路探索装置を備える一実施形態のサーバー装置と該サーバー装置と通信するナビゲーション装置を備える車両とを説明するブロック図。
【図2】車両のナビゲーション装置を説明するブロック図。
【図3】探索された3つのルート候補を説明する模式図。
【図4】ナビゲーション装置で実行されるエコルート探索処理ルーチンを説明するフローチャート。
【図5】サーバー装置で実行されるエコルート提供処理ルーチンを説明するフローチャート。
【図6】別の平均速度算出処理ルーチンを説明するフローチャート。
【図7】他の別の平均速度算出処理ルーチンを説明するフローチャート。
【発明を実施するための形態】
【0022】
(第1の実施形態)
以下、本発明を具体化した一実施形態について、図1〜図5に従って説明する。
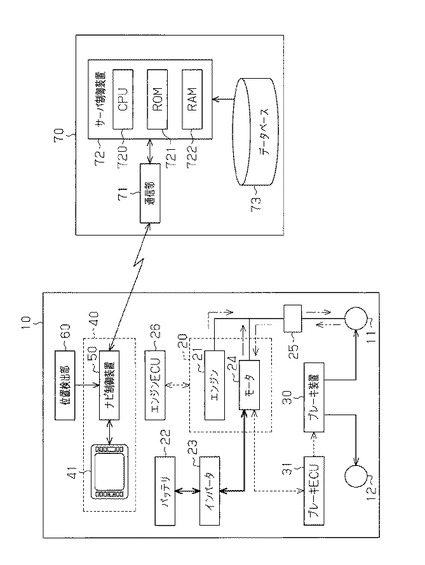
図1に示すように、車両10は、駆動輪11に付与する駆動力を発生する動力発生装置20と、駆動輪11及び従動輪12に付与する制動力を発生するブレーキ装置30と、目的地までのルート(経路)を乗員に案内するナビゲーション処理を行うナビゲーション装置40とを備えている。
【0023】
動力発生装置20には、ガソリンなどの化石燃料(エネルギ)に基づき駆動するエンジン21と、バッテリ(蓄電池)22に蓄電された電力(電力エネルギ)がインバータ23を介して供給された場合に駆動するモータ24とが設けられている。こうした動力発生装置20で発生した駆動力は、ディファレンシャルなどの動力伝達機構25を介して駆動輪11に伝達される。また、動力発生装置20は、エンジンECU(「エンジン用電子制御装置」ともいう。)26によって制御される。このエンジンECU26は、エンジン21の駆動に基づき車両10を走行させる第1のモードと、モータ24の駆動に基づき車両10を走行させる第2のモードとで制御態様を切り替えている。すなわち、車両10は、ハイブリッド車両である。
【0024】
本実施形態において、モータ24は、駆動力を発生させるだけではなく、駆動輪11に対して回生制動力を付与可能である。この場合、モータ24は、駆動輪11側から伝達される動力に応じて発電する。そして、このようにモータ24で発生した電力(回生エネルギ)は、インバータ23を介してバッテリ22に供給される。その結果、バッテリ22には、モータ24で発生した電力が蓄電される。
【0025】
ブレーキ装置30は、運転手による図示しないブレーキペダルの操作に応じた常用制動力を各車輪11,12に付与するための装置である。このブレーキ装置30を制御するブレーキECU(「ブレーキ用電子制御装置」ともいう。)31は、車両減速時には、ブレーキ装置30に加え、動力発生装置20のモータ24も制御する。
【0026】
本実施形態の車両10の駆動輪11には、運転手がブレーキペダル(図示略)を操作した場合、モータ24による回生制動力とブレーキ装置30による常用制動力とのうち、回生制動力が優先的に付与される。運転手によるブレーキペダル(図示略)の操作量に応じた制動力をモータ24による回生制動力のみで対応可能である場合、ブレーキECU31は、駆動輪11に対して回生制動力のみが付与されるようにモータ24を制御する。一方、運転手によるブレーキペダル(図示略)の操作量に応じた制動力をモータ24による回生制動力だけでは対応できない場合、ブレーキECU31は、駆動輪11に対して回生制動力と常用制動力とが付与されるようにモータ24及びブレーキ装置30を制御する。なお、ブレーキECU31は、従動輪12に対して常用制動力が付与されるようにブレーキ装置30を制御する。
【0027】
また、ブレーキECU31は、車両の車体速度に応じて、前輪と後輪との制動力配分を異ならせている。例えば、高速走行時に運転手がブレーキペダル(図示略)を操作した場合、ブレーキECU31は、低速走行時に運転手がブレーキペダル(図示略)を操作した場合よりも後輪に対する制動力の配分を多くする。
【0028】
つまり、車両が高速走行する際に運転手がブレーキペダル(図示略)を操作した場合、後輪駆動車のモータ24で発生する電力は、前輪駆動車のモータ24で発生する電力よりも多くなる。その一方で、車両が低速走行する際に運転手がブレーキペダル(図示略)を操作した場合、前輪駆動車のモータ24で発生する電力は、後輪駆動車のモータ24で発生する電力よりも多くなる。
【0029】
次に、ナビゲーション装置40について、図1及び図2を参照して説明する。
図1に示すように、ナビゲーション装置40は、表示装置41と、該表示装置41を制御するナビ制御装置50とを備えている。表示装置41には、車両の乗員に各種情報を視認可能な状態で提供するディスプレイ42と、該ディスプレイ42の前面に配置される液晶のタッチパネル43とが設けられている。また、表示装置41においてディスプレイ42の側方には、複数種類の操作ボタン44が設けられている。
【0030】
こうした表示装置41は、乗員による操作ボタン44及びタッチパネル43の操作を受付けた場合、その操作内容に応じた信号をナビ制御装置50に出力する。そして、表示装置41では、出力した信号の返答としてナビ制御装置50からの画像データが入力されると、該画像データに基づいた画像がディスプレイ42に表示される。
【0031】
ナビ制御装置50には、位置検出部60が情報を送信可能な状態で車両側I/F51を介して接続されている。位置検出部60は、GPS受信部61、車速センサ62及びジャイロセンサ63を有している。ナビ制御装置50は、GPS受信部61によって受信された受信信号に基づき、電波航法によって緯度・経度などの絶対位置を検出する。また、ナビ制御装置50は、車速センサ62及びジャイロセンサ63からの検出信号に基づき、自律航法を用いて基準位置からの相対位置を算出する。そして、ナビ制御装置50は、検出した絶対位置及び算出した相対位置を組み合わせて車両の現在地を特定する。なお、GPSとは、「Global Positioning System 」の略記である。
【0032】
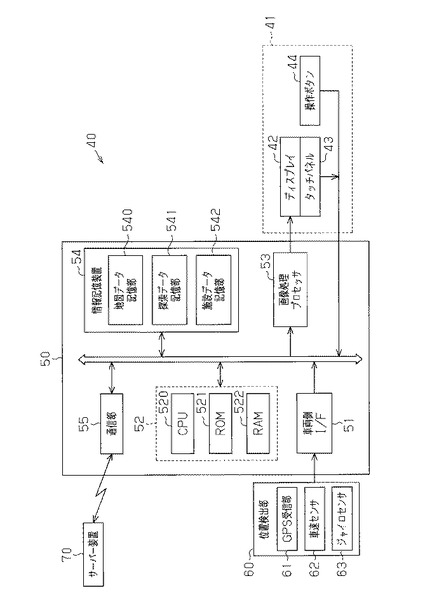
ナビ制御装置50は、制御部52、画像処理プロセッサ53及び情報記憶装置54を備えている。また、ナビ制御装置50には、車外に設けられたサーバー装置70と各種情報の送受信を行う通信部55が設けられている。
【0033】
制御部52は、CPU520、ROM521及びRAM522などで構成されている。ROM521には、目的地までのルート(経路)の探索や案内をするためのプログラムなどが記憶されている。RAM522には、CPU520の作業領域及び探索されたルートなどを記憶する記憶領域が形成される。
【0034】
画像処理プロセッサ53は、制御部52からの制御信号に基づいてディスプレイ42に表示するための各種の画像データを生成し、該生成した画像データを表示装置41に出力する。例えば、車両の現在位置から目的地までのルートが制御部52で探索された場合、画像処理プロセッサ53は、探索されたルートと、該ルートに沿った案内の開始の許可を求める画面となどを表示させるための画像データを生成し、該画像データに基づく画像をディスプレイ42に表示させる。
【0035】
情報記憶装置54は、ハードディスクや光ディスクなどの外部記憶媒体である。こうした情報記憶装置54には、地図データ記憶部540、探索データ記憶部541及び施設データ記憶部542が形成されている。地図データ記憶部540は、道路地図、住宅地図及び建物形状地図などの地図データを記憶している。探索データ記憶部541は、複数の地点(「ノード」ともいう。)、各地点を結ぶ道路区間(「リンク」ともいう。)及び各道路区間の距離などといった各種道路情報に関するデータを記憶している。施設データ記憶部542は、飲食店、ガソリンスタンド、病院、駐車場などの各種施設及び該各種施設の住所や電話番号などの施設データを記憶している。
【0036】
本実施形態のナビゲーション装置40は、その内部で目的地までのルートを探索するだけではなく、サーバー装置70で探索されたルートに沿ったナビゲーション処理を行うことが可能である。この場合、車両10の乗員によって目的地が設定されると、ナビ制御装置50は、車両10の現在位置、目的地及び車両10の駆動方式を特定するためのルート探索必要情報をサーバー装置70に送信する。すると、ナビ制御装置50は、現在位置から目的地までのルートを特定するためのルート情報をサーバー装置70から受信し、該受信したルート情報が示すルートを制御部52のRAM522に記憶させる。そして、ナビ制御装置50は、表示装置41を用い、サーバー装置70で探索されたルートに沿ったナビゲーション処理を行う。
【0037】
また、ナビゲーション装置40は、車両10の走行時に取得されたプローブ情報をサーバー装置70に送信する。本実施形態のナビゲーション装置40が送信するプローブ情報としては、車両10が走行した各道路区間での車両の車体速度、各道路区間での化石燃料(エネルギ)の消費量、及び車輪11,12に制動力が付与され得る減速要因のある道路区間などを特定するための情報が挙げられる。
【0038】
なお、プローブ情報として送信される道路区間での化石燃料の消費量とは、道路区間を上記第1のモードで車両が走行した際、即ちエンジン21の駆動のみで車両が走行した際に該車両で消費された化石燃料の消費量のことを示している。また、減速要因のある道路区間としては、例えば、交通ルールとして一時停止しなくてはならない箇所を有する道路区間、信号のある道路区間、交通渋滞が発生している道路区間、車両10の旋回半径が基準値以上となる急カーブを有する道路区間、及び料金所が存在する道路区間(有料道路などの一区間)が挙げられる。
【0039】
次に、経路探索装置の一例としてのサーバー装置70について、図1を参照して説明する。
図1に示すように、サーバー装置70は、ナビゲーション装置40と通信するための通信部(情報受信手段)71と、該通信部71がナビゲーション装置40から受信した情報に基づいた処理を行うサーバー制御装置(制御装置)72と、該サーバー制御装置72がルート探索を行う際に必要な情報を管理するデータベース73とを備えている。通信部71は、ナビゲーション装置40から送信されたプローブ情報及びルート探索必要情報を受信し、該受信した各種情報をサーバー制御装置72に出力する。また、通信部71は、サーバー制御装置72によって探索されたルートを特定するためのルート情報をナビゲーション装置40に送信する。
【0040】
サーバー制御装置72は、CPU720、ROM721及びRAM722などで構成されている。こうしたサーバー制御装置72は、通信部71からプローブ情報が入力された場合、該プローブ情報をデータベース73に登録する。また、サーバー制御装置72は、通信部71からルート探索必要情報が入力された場合、該ルート探索必要情報が示す車両10の現在位置、目的地及び車両10の駆動方式を取得する。そして、サーバー制御装置72は、取得した車両10の現在位置から目的地までのルートを、データベース73を用いて探索し、探索したルートを特定するためのルート情報を通信部71に出力する。
【0041】
データベース73には、サーバー制御装置72によるルート探索を行うために必要な各種情報が記憶されている。すなわち、データベース73には、複数の地点、各地点を結ぶ道路区間及び各道路区間の距離などに関する情報が記憶されている。また、データベース73には、道路区間を走行する際の車両の推定平均速度、及び道路区間を走行する際に車両で消費される化石燃料(エネルギ)の推定消費量が道路区間毎に互いに関連付けられて記憶されている。したがって、本実施形態では、データベース73が、地図上の道路を構成する複数の道路区間と、それらの道路区間をエンジン21のみの駆動で車両が走行した際における化石燃料の推定消費量とを関連付けて記憶する道路区間記憶手段として機能する。
【0042】
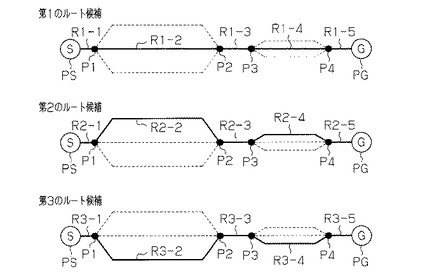
本実施形態のサーバー装置70では、目的地までの走行に伴う車両における化石燃料の推定消費量を少なくすることを優先条件として、ルート探索が行われる。こうした優先条件の基でルート探索を行った場合、図3に示すように、化石燃料の推定消費量が同程度となる複数(図3では3つ)のルート候補(経路候補)が、エコルートの候補として探索されることがある。なお、「エコルート」とは、化石燃料の消費効率のよい経路のことを示している。
【0043】
これら第1、第2及び第3の各ルート候補は、現在位置PSから、第1の地点P1、第2の地点P2、第3の地点P3、第4の地点P4を経由して目的地PGに到着するルートである。第1のルート候補は、現在位置PSから第1の地点P1までの道路区間R1−1、第1の地点P1から第2の地点P2までの道路区間R1−2、第2の地点P2から第3の地点P3までの道路区間R1−3、第3の地点P3から第4の地点P4までの道路区間R1−4及び第4の地点P4から目的地PGまでの道路区間R1−5を繋いだルートである。第2のルート候補(一の経路候補)は、第1のルート候補(他の経路候補)と重複する道路区間と、重複しない道路区間とを有している。また、第3のルート候補(一の経路候補)は、第1及び第2の各ルート候補(他の経路候補)と重複する道路区間と、重複しない道路区間とを有している。
【0044】
第2のルート候補の現在位置PSから第1の地点P1までの道路区間R2−1は、第1のルート候補の道路区間R1−1と同一である。また、第2のルート候補の第1の地点P1から第2の地点P2までの道路区間R2−2は、第1のルート候補の道路区間R1−2とは異なる。また、第2のルート候補の第2の地点P2から第3の地点P3までの道路区間R2−3は、第1のルート候補の道路区間R1−3と同一である。また、第2のルート候補の第3の地点P3から第4の地点P4までの道路区間R2−4は、第1のルート候補の道路区間R1−4とは異なる。そして、第2のルート候補の第4の地点P4から目的地PGまでの道路区間R2−5は、第1のルート候補の道路区間R1−5と同一である。
【0045】
第3のルート候補の現在位置PSから第1の地点P1までの道路区間R3−1は、第1及び第2のルート候補の道路区間R1−1,R2−1と同一である。また、第3のルート候補の第1の地点P1から第2の地点P2までの道路区間R3−2は、第1及び第2のルート候補の道路区間R1−2,R2−2とは異なる。また、第3ルート候補の第2の地点P2から第3の地点P3までの道路区間R3−3は、第1及び第2のルート候補の道路区間R1−3,R2−3と同一である。また、第3ルート候補の第3の地点P3から第4の地点P4までの道路区間R3−4は、第1及び第2のルート候補の道路区間R1−4,R2−4とは異なる。そして、第3のルート候補の第4の地点P4から目的地PGまでの道路区間R3−5は、第1及び第2のルート候補の道路区間R1−5,R2−5と同一である。
【0046】
ところで、ハイブリッド車両では、車両の減速時にモータ24で電力(回生エネルギ)が発生してバッテリ(蓄電池)22に蓄電される。こうして蓄電された電力は、モータ24を用いた車両走行時に使用される。そのため、ハイブリッド車両の場合には、化石燃料の推定消費量だけではなく、走行時に蓄電可能な電力量も考慮したルート候補が、エコルートとして相応しい。
【0047】
そこで、ハイブリッド車両に対するエコルートを設定するためにナビゲーション装置40及びサーバー装置70で実行される各種処理ルーチンについて、図4及び図5に示すフローチャートを参照して説明する。
【0048】
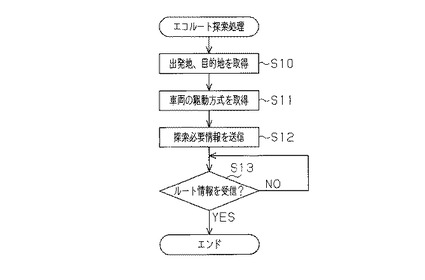
始めに、車両10の現在位置から目的地までのエコルートをサーバー装置70から提供を受ける際にナビゲーション装置40のナビ制御装置50が実行するエコルート探索処理ルーチンを、図4に示すフローチャートを参照して説明する。
【0049】
さて、エコルート探索処理ルーチンは、車両10の乗員による入力によって目的地が設定されたことを契機に実行される。そして、エコルート探索処理ルーチンにおいて、ナビ制御装置50は、車両10の現在位置を出発地として取得すると共に、設定された目的地を取得する(ステップS10)。続いて、ナビ制御装置50は、車両10の駆動方式(前輪駆動又は後輪駆動)を取得する(ステップS11)。そして、ナビ制御装置50は、取得した出発地、目的地及び駆動方式を特定するための探索必要情報をサーバー装置70に送信する(ステップS12)。
【0050】
続いて、ナビ制御装置50は、サーバー装置70で探索されたエコルートを特定するためのルート情報を、サーバー装置70から受信したか否かを判定する(ステップS13)。ルート情報を未受信である場合(ステップS13:NO)、ナビ制御装置50は、ルート情報を受信するまでステップS13の判定処理を繰り返し実行する。この間、ナビ制御装置50は、エコルートを探索中である旨のメッセージをディスプレイ42に表示させる。一方、ルート情報を受信した場合(ステップS13:YES)、ナビ制御装置50は、受信したルート情報をRAM522に記憶させ、エコルート探索処理ルーチンを終了する。その後、ナビ制御装置50は、RAM522に記憶したルート情報が示すエコルートに沿ったナビゲーション処理を開始する。
【0051】
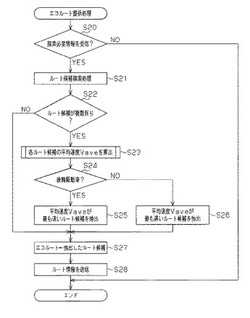
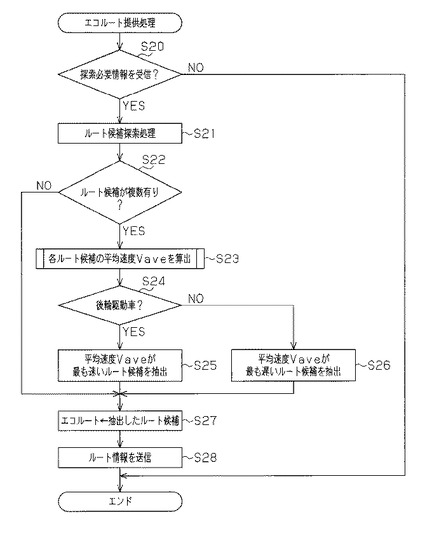
次に、車両10から受信した探索必要情報に基づいたエコルートを車両側に提供するためにサーバー装置70のサーバー制御装置72が実行するエコルート提供処理ルーチンを、図5に示すフローチャートを参照して説明する。
【0052】
さて、エコルート提供処理ルーチンは、予め設定された所定周期毎(例えば、0.1秒毎)に実行される。そして、エコルート提供処理ルーチンにおいて、サーバー制御装置72は、車両10のナビゲーション装置40から探索必要情報を、通信部71で受信したか否かを判定する(ステップS20)。探索必要情報は、上述したように、出発地、目的地及び車両10の駆動方式を特定するための情報である。そのため、探索必要情報を受信したということは、車両10の駆動方式を取得したことと等しい。したがって、本実施形態では、サーバー制御装置72が、方式取得手段としても機能する。また、ステップS20が、方式取得ステップに相当する。
【0053】
そして、探索必要情報を未受信である場合(ステップS20:NO)、サーバー制御装置72は、エコルート提供処理ルーチンを一旦終了する。一方、探索必要情報を受信した場合(ステップS20:YES)、サーバー制御装置72は、受信した探索必要情報が示す出発地から目的地までのルート候補(経路候補)を探索するルート候補探索処理を行う(ステップS21)。ここでは、サーバー制御装置72は、目的地までの走行に伴う車両10における化石燃料の推定消費量を少なくすることを優先条件としてルート候補を探索する。すなわち、サーバー制御装置72は、化石燃料の推定消費量が少ない道路区間を繋いだルート候補を生成する。このとき、サーバー制御装置72は、エンジン21のみを駆動源として車両10を走行させた際に、化石燃料の消費量が少ないと推定されるルート候補を探索する。したがって、本実施形態では、サーバー制御装置72が、経路探索手段として機能する。また、ステップS21が、経路探索ステップに相当する。
【0054】
続いて、サーバー制御装置72は、化石燃料の推定消費量が同程度となるルート候補が複数有るか否かを判定する(ステップS22)。ここでいう「推定消費量が同程度となるルート候補」とは、推定消費量が完全一致するルート候補であるとは限らない。例えば、化石燃料の推定消費量が最少となるルート候補と、該最少となるルート候補の推定消費量に対してオフセット量を加算した基準値以下の推定消費量のルート候補とを、「推定消費量が同程度となるルート候補」といってもよい。なお、オフセット量を、予め設定された所定量としてもよいし、出発地から目的地までの直線距離が長いほど大きな値としてもよい。
【0055】
そして、ステップS21で探索されたルート候補が1つのみである場合(ステップS22:NO)、サーバー制御装置72は、その処理を後述するステップS27に移行する。一方、ステップS21で探索されたルート候補が複数有る場合(ステップS22:YES)、サーバー制御装置72は、各ルート候補の平均速度Vaveを算出する(ステップS23)。ルート候補の平均速度Vaveとは、ルート候補を車両10に走行させた際における該車両10の平均車体速度の推定値のことを示す。したがって、本実施形態では、サーバー制御装置72が、速度推定手段としても機能する。
【0056】
ここで、ルート候補の平均速度Vaveの算出の一例として、上記第1のルート候補の平均速度Vaveの算出について説明する。
サーバー制御装置72は、第1のルート候補を構成する各道路区間R1−1,R1−2,R1−3,R1−4,R1−5での平均速度(V1,V2,V3,V4,V5)と、各道路区間R1−1,R1−2,R1−3,R1−4,R1−5の走行距離(L1,L2,L3,L4,L5)とを、データベース73から読み出す。そして、サーバー制御装置72は、以下に示す関係式(式1)(式2)を用いて、第1のルート候補の平均速度Vaveを算出する。なお、平均速度(V1)は道路区間R1−1での平均速度を示すと共に、走行距離(L1)は道路区間R1−1の走行距離を示している。
【0057】
【数1】

ただし、L_all…第1のルート候補の走行距離
続いて、サーバー制御装置72は、探索必要情報を送信した車両10が後輪駆動車であるか否かを判定する(ステップS24)。後輪駆動車である場合(ステップS24:YES)、サーバー制御装置72は、後輪駆動車で回生エネルギを発生させやすい推奨道路特性として、平均速度Vaveが速いという特性を取得し、各ルート候補のうち平均速度Vaveが最も速いルート候補を抽出する(ステップS25)。したがって、本実施形態では、サーバー制御装置72が、車両10の駆動方式に基づき、該車両10で回生エネルギを発生させやすい推奨道路特性を取得する特性取得手段としても機能する。また、ステップS25が、特性取得ステップに相当する。その後、サーバー制御装置72は、その処理を後述するステップS27に移行する。
【0058】
一方、前輪駆動車である場合(ステップS24:NO)、サーバー制御装置72は、前輪駆動車で回生エネルギを発生させやすい推奨道路特性として、平均速度Vaveが遅いという特性を取得し、各ルート候補のうち平均速度Vaveが最も遅いルート候補を抽出する(ステップS26)。したがって、本実施形態では、ステップS26が、特性取得ステップに相当する。その後、サーバー制御装置72は、その処理を次のステップS27に移行する。
【0059】
ステップS27において、サーバー制御装置72は、抽出したルート候補をエコルートと設定する。このとき、ルート候補が1つのみ探索された場合には、サーバー制御装置72は、唯一のルート候補をエコルートと設定する。続いて、サーバー制御装置72は、設定したエコルートを特定するためのルート情報を、探索必要情報を送信した車両10のナビゲーション装置40に通信部71から送信させる(ステップS28)。すなわち、ステップS28では、設定したエコルートを、車両10の乗員に対して提供する。したがって、本実施形態では、サーバー制御装置72及び通信部71により、複数のルート候補が探索された場合に、取得された推奨道路特性に基づき各ルート候補のうち何れか一つのルート候補を目的地までのエコルートとして選択し、該エコルートを提供する経路提供手段が構成される。また、ステップS25,S26,S27,S28により、サーバー制御装置72にエコルートを車両側に提供させる経路提供ステップが構成される。その後、サーバー制御装置72は、エコルート提供処理ルーチンを一旦終了する。
【0060】
化石燃料の推定消費量が同程度となる各ルート候補の平均速度Vaveは、互いに異なる。そして、後輪駆動車である場合には、平均速度Vaveが最も速いルート候補がエコルートに設定される。一方、前輪駆動車である場合には、平均速度Vaveが最も遅いルート候補がエコルートに設定される。
【0061】
したがって、本実施形態では、以下に示す効果を得ることができる。
(1)本実施形態では、目的地までの走行に伴う車両10における化石燃料の推定消費量を少なくすることを優先条件として探索されたルート候補が複数存在する場合には、車両10の駆動方式に基づき、車両で回生エネルギを発生させやすい推奨道路特性が取得される。これは、車両10の駆動方式によって、回生エネルギの発生させやすい推奨道路特性が異なることがあるためである。そして、取得された推奨道路特性に基づき、各ルート候補のうち何れか一つのルート候補が選択され、該ルート候補が、目的地までのエコルートとして車両10の乗員に提供される。したがって、走行時に回生エネルギを発生可能な車両10に対して、化石燃料の推定消費量を少なくすることを優先条件としたエコルートを提供することができる。
【0062】
そして、提供されたエコルートに沿って運転手が車両10を走行させた場合には、車両10(即ち、ハイブリッド車両)での化石燃料の消費量を少なくさせることができる。
(2)本実施形態では、車両10での化石燃料の推定消費量が同程度となるルート候補が複数存在する場合において車両10が後輪駆動車であるときには、各ルート候補を車両に走行させた場合における該車両の平均速度Vaveが算出される。そして、算出された平均速度Vaveが最も速いルート候補が、エコルートとして車両10の乗員に提供される。したがって、車両10が後輪駆動車である場合には、その制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0063】
また、車両10での化石燃料の推定消費量が同程度となるルート候補が複数存在する場合において車両10が前輪駆動車であるときには、算出された平均速度Vaveが最も遅いルート候補が、エコルートとして車両10の乗員に提供される。したがって、車両10が前輪駆動車である場合には、その制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0064】
(3)データベース73に記憶される情報に基づき、車両10での化石燃料の推定消費量が少ないルート候補が探索される。すなわち、データベース73に記憶される各道路区間での化石燃料の推定消費量の正確性が高いほど、エコルートの探索精度を向上させることができる。
【0065】
(第2の実施形態)
次に、本発明の第2の実施形態を図6に従って説明する。なお、第2の実施形態は、上記ステップS23の処理の内容が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1の実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0066】
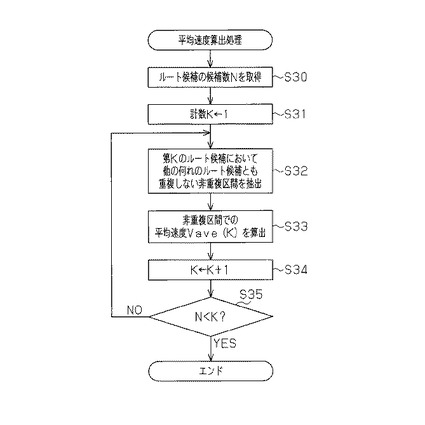
ルート候補の平均速度Vaveの算出を算出するための平均速度算出処理ルーチンについて、図6に示すフローチャートを参照して説明する。
さて、平均速度算出処理ルーチンにおいて、サーバー制御装置72は、上記ステップS21で探索したルート候補の候補数Nを取得し(ステップS30)、計数Kに「1」をセットする(ステップS31)。そして、サーバー制御装置72は、第Kのルート候補において他の何れのルート候補(他の何れの経路候補)とも重複していない道路区間を非重複区間として抽出する(ステップS32)。続いて、サーバー制御装置72は、抽出した非重複区間での平均速度Vave(K)を算出する(ステップS33)。すなわち、第Kのルート候補が一の経路候補に相当し、他のルート候補が他の経路候補に相当する。
【0067】
ここで、ステップS32,S33での各処理について、図3に示す場合を例にとって説明する。この場合、候補数Nは「3」となる。
計数Kが「1」である場合、サーバー制御装置72は、道路区間R1−2,R1−4を非重複区間とする。そして、サーバー制御装置72は、上記関係式(式1)(式2)を用いて、非重複区間での平均速度Vave(1)を算出する。ただし、サーバー制御装置72は、他のルート候補と重複する道路区間R1−1,R1−3,R1−5の距離(L1,L3,L5)には「0(零)」をセットする。その結果、非重複区間の平均速度Vave(K)が算出される。
【0068】
そして、ステップS33の処理が終了すると、サーバー制御装置72は、計数Kを「1」だけインクリメントする(ステップS34)。続いて、サーバー制御装置72は、更新した計数Kが候補数Nよりも大きいか否かを判定する(ステップS35)。計数Kが候補数N以下である場合(ステップS35:NO)、サーバー制御装置72は、非重複区間での平均速度を算出していないルート候補があると判断し、その処理を前述したステップS32に移行する。一方、計数Kが候補数Nよりも大きい場合(ステップS35:YES)、サーバー制御装置72は、全てのルート候補における非重複区間での平均速度を算出したと判断し、平均速度算出処理ルーチンを終了する。
【0069】
なお、ここでは、一のルート候補の一部が他のルート候補と一致していない場合について説明した。しかし、場合によっては、一のルート候補が他のルート候補と全く重複しないことがある。この場合は、上記第1の実施形態と同様の方法で、各ルート候補の平均速度Vaveが算出される。
【0070】
したがって、本実施形態では、上記第1の実施形態の効果(1)〜(3)の効果に加え、以下に示す効果を得ることができる。
(4)本実施形態では、一のルート候補において他のルート候補と重複しない非重複区間(他の何れのルート候補とも重複しない道路区間)での平均速度Vaveが推定されると共に、他のルート候補において一のルート候補と重複しない非重複区間での平均速度Vaveが推定される。そして、このように算出された各ルート候補の平均速度Vaveに基づき、エコルートが選択される。そのため、車両の制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0071】
(第3の実施形態)
次に、本発明の第3の実施形態を図7に従って説明する。なお、第3の実施形態は、平均速度算出処理ルーチンの内容が第2の実施形態と異なっている。したがって、以下の説明においては、第2の実施形態と相違する部分について主に説明するものとし、第1及び第2の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0072】
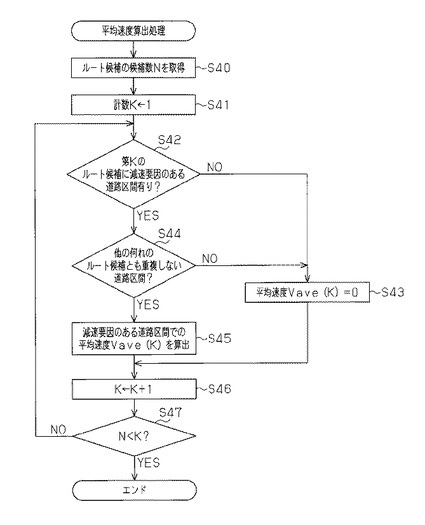
本実施形態の平均速度算出処理ルーチンについて、図7に示すフローチャートを参照して説明する。
さて、平均速度算出処理ルーチンにおいて、サーバー制御装置72は、上記ステップS30,S31の各処理に相当するステップS40,S41の処理を順次実行する。続いて、サーバー制御装置72は、第Kのルート候補を構成する各道路区間の中に、上記減速要因のある道路区間があるか否かを判定する(ステップS42)。具体的には、サーバー制御装置72は、第Kのルート候補を構成する各道路区間に関する情報をデータベース73から取得し、取得した情報の中に減速要因に関する情報があるか否かを判定する。
【0073】
減速要因のある道路区間がない場合(ステップS42:NO)、サーバー制御装置72は、第Kのルート候補の平均速度Vave(K)を「0(零)」と設定し(ステップS43)、その処理を後述するステップS46に移行する。一方、減速要因のある道路区間がある場合(ステップS42:YES)、サーバー制御装置72は、第Kのルート候補を構成する各道路区間の中から減速要因のある道路区間を抽出し、該減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間であるか否かを判定する(ステップS44)。例えば、第1のルート候補の道路区間R1−1に減速要因がある場合、サーバー制御装置72は、減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間ではないと判定する(図3参照)。その一方で、第1のルート候補の道路区間R1−2に減速要因がある場合、サーバー制御装置72は、減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間であると判定する。したがって、本実施形態では、サーバー制御装置72が、減速区間抽出手段としても機能する。
【0074】
減速要因のある道路区間が他のルート候補と重複する道路区間である場合(ステップS44:NO)、サーバー制御装置72は、その処理を前述したステップS43に移行する。一方、減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間である場合(ステップS44:YES)、サーバー制御装置72は、減速要因があること(第1の条件)、及び他の何れのルート候補とも重複しないこと(第2の条件)を満たす道路区間での平均速度Vave(K)を、上記関係式(式1)(式2)を用いて算出する(ステップS45)。すなわち、サーバー制御装置72は、第1及び第2の各条件を満たさない道路区間の距離には「0(零)」をセットした状態で、平均速度Vave(K)算出する。続いて、サーバー制御装置72は、その処理を次のステップS46に移行する。
【0075】
ステップS46において、サーバー制御装置72は、計数Kを「1」だけインクリメントする。そして、サーバー制御装置72は、上記ステップS35の判定処理と同等のステップS47の判定処理を行う。
【0076】
したがって、本実施形態では、上記各実施形態の効果(1)〜(4)の効果に加え、以下に示す効果を得ることができる。
(5)回生エネルギは、車両10の駆動輪11に回生制動力が付与された場合に発生するエネルギである。そのため、車両10に制動力を付与して該車両10を減速させる機会の少ないルート候補は、回生エネルギが発生しにくいルートであるということができる。そこで、本実施形態では、探索されたルート候補において減速要因がある道路区間が抽出される。そして、抽出された道路区間での平均速度Vave(K)が推定される。そのため、回生エネルギが発生する可能性が高いルート候補を、エコルートとして車両の乗員に提供することができる。
【0077】
なお、上記各実施形態は、以下のような別の実施形態に変更してもよい。
・各実施形態において、データベース73には、VICS(登録商標)情報を登録させてもよい。なお、VICSは「Vehicle Information and Communication」の略記である。
【0078】
・第3の実施形態において、ステップS44の判定処理を省略してもよい。
・各実施形態において、化石燃料の推定消費量を少なくするという優先条件に基づき、ルート候補を探索する場合、推定消費量の少ない順の上位M個(Mは2以上の整数であって、例えば、3個)のルート候補を探索するようにしてもよい。
【0079】
・第1の実施形態において、ルート候補の平均速度Vaveは、該ルート候補を構成する各道路区間の平均速度の平均値であってもよい。
・車両減速時に発生する回生エネルギの発生量は、駆動輪11に大きな回生制動力が付与されるほど多くなる。そのため、各ルート候補の平均速度Vaveに大きな差がある場合には、前輪駆動車であっても、平均速度Vaveが速いルート候補のほうが、エコルートとして相応しいことがある。
【0080】
そこで、各ルート候補のうち平均速度Vaveが最も速いルート候補を最速候補とする。そして、最速候補の平均速度Vaveに所定のゲイン値(0(零)よりも大きく且つ1よりも小さい値であって、例えば0.9)を乗算して判定速度を算出する。そして、判定速度よりも遅い平均速度Vaveのルート候補がない場合には、各ルート候補のうち、平均速度Vaveが最も遅いルート候補を前輪駆動車に対してエコルートとして提供してもよい。
【0081】
その一方で、判定速度よりも遅い平均速度Vaveのルート候補がある場合には、判定速度よりも遅い平均速度Vaveのルート候補を除き、残りのルート候補の中から、平均速度Vaveが最も遅いルート候補を前輪駆動車に対してエコルートとして提供してもよい。この場合、車両10が前輪駆動車であっても後輪駆動車であっても、同一のルート候補がエコルートとして提供されることがある。
【0082】
・車両10が登坂路を走行する場合、車両重心は、車体後方に移動しやすい。そのため、登坂路走行時において車両10の減速時には、後輪への制動力の配分が高めに設定される。一方、車両10が降坂路を走行する場合、車両重心は、車体前方に移動しやすい。そのため、降坂路走行時において車両10の減速時には、前輪への制動力の配分が高めに設定される。
【0083】
そこで、こうした制動特性を有する車両において当該車両が後輪駆動車である場合には、登坂路となる道路区間が最も多いルート候補をエコルートとしてもよい。また、当該車両が前輪駆動車である場合には、降坂路となる道路区間が最も多いルート候補をエコルートとしてもよい。
【0084】
・各実施形態において、サーバー装置70に探索必要情報を送信するナビゲーション装置は、車載のナビゲーション装置ではなく、ナビゲーション機能を有する携帯型の情報端末(例えば、携帯電話)であってもよい。
【0085】
・各実施形態において、各道路区間での平均車体速度や交通渋滞の有無などをナビゲーション装置40で取得可能である場合には、該ナビゲーション装置40で、エコルートを探索させてもよい。この場合、ナビゲーション装置40が、経路探索装置として機能することになる。
【0086】
・各実施形態において、サーバー装置70と通信可能なナビゲーション装置40を搭載する車両は、電気自動車であってもよいし、プラグインハイブリッド車両であってもよい。こうした場合、サーバー制御装置72は、目的地までの走行に伴う車両における電力エネルギの推定消費量を少なくすることを優先条件として経路候補を探索することになる。つまり、経路探索手段は、目的地までの走行で使用されるエネルギの推定消費量を少なくすることを優先条件としてルート候補を探索する。
【0087】
次に、上記各実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
(イ)前記車両の出発地、目的地及び前記車両の駆動方式を特定するための情報を、該車両のナビゲーション装置から受信する情報受信手段をさらに備え、
前記方式取得手段は、前記情報受信手段によって受信された情報が示す駆動方式を取得し、
前記経路探索手段は、前記情報受信手段によって受信された情報が示す出発地及び目的地を取得し、前記優先条件に基づき経路候補を探索し、
前記経路提供手段は、前記経路探索手段によって複数の経路候補が探索された場合に、前記特性取得手段によって取得された推奨道路特性に基づき、前記各経路候補のうち何れか一つの経路候補を選択し、該経路候補を特定するための経路情報を前記ナビゲーション装置に送信することを特徴とする経路探索装置。
【0088】
上記構成によれば、車両のナビゲーション装置から情報を受信した場合には、該情報が示す出発地、目的地及び前記車両の駆動方式に基づいた経路が探索される。そして、このように探索された経路を特定するための経路情報がナビゲーション装置に送信される。その結果、ナビゲーション装置は、エネルギの消費量及び走行中に発生し得る回生エネルギを考慮したエコルートを車両の乗員に案内することができる。
【0089】
(ロ)前記速度推定手段は、
前記経路探索手段によって複数の経路候補が探索された場合に、
他の何れの経路候補とも重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を、前記経路候補毎に取得することを特徴とする記載の経路探索装置。
【符号の説明】
【0090】
10…車両、11,12…車輪、22…バッテリ、24…モータ、40…経路探索装置の一例としてのナビゲーション装置、70…経路探索装置の一例としてのサーバー装置、71…経路提供手段を構成する通信部(情報受信手段)、72…経路提供手段を構成するサーバー制御装置(経路探索手段、方式取得手段、特性取得手段、速度推定手段、減速区間抽出手段、制御装置)、R1−1〜R1−5,R2−1〜R2−5,R3−1〜R3−5…道路区間。
【技術分野】
【0001】
本発明は、車両の現在位置から目的地までの経路を探索する経路探索装置、経路探索方法及び経路探索プログラムに関する。
【背景技術】
【0002】
一般に、この種の経路探索装置として、目的地までの経路を探索し、該探索した経路を車両の乗員に案内するナビゲーション装置が知られている。こうしたナビゲーション装置では、車両の乗員によって設定された優先条件(例えば、所要時間、走行距離、燃料の消費量)に基づき、経路探索が行われる。例えば、優先条件として燃料の消費量が設定された場合には、リンク(道路区間)毎の車両の平均速度に基づきリンク毎の燃料の推定消費量が算出される。そして、推定消費量の総和が最少となるリンクを繋いだ経路が探索され、該経路がエコルートとして車両の乗員に案内される。なお、ここでいう「エコルート」とは、エネルギの消費効率のよい経路のことを示している。
【0003】
また、ナビゲーション装置としては、目的地まで車両を走行させる際の希望予算を車両の乗員に入力させ、該入力された希望予算の範囲内で車両を目的地に到着させることが可能な経路を探索する装置も知られている(特許文献1参照)。なお、「希望予算」には、目的地まで車両を走行させる際に使用される燃料の予算、及び有料道路を利用する際にはその料金などを含んでいる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−275869号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、近年では、バッテリに蓄電された電力エネルギに基づいたモータの駆動によって走行可能なハイブリッド車両及び電気自動車が普及しつつある。こうした車両では、該車両の減速時に回生エネルギが発生し、該回生エネルギがバッテリに蓄電される。すなわち、車両走行中に、車両を走行させる際に必要な電力エネルギが蓄えられる。このように走行時にバッテリに蓄電される電力エネルギ量は、車両の駆動方式(前輪駆動又は後輪駆動)によって異なる。そのため、回生エネルギを発生可能な車両に対して上記エコルートを探索する場合には、目的地までの間で車両が発生し得る回生エネルギの発生量を、車両の駆動方式に応じて推定し、該回生エネルギの発生量を考慮したエコルートを探索する必要がある。
【0006】
本発明は、このような事情に鑑みてなされたものであり、その目的は、走行時に回生エネルギを発生可能な車両に対して、エネルギの推定消費量を少なくすることを優先条件とした経路を提供することができる経路探索装置、経路探索方法及び経路探索プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索する経路探索装置であって、目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索する経路探索手段と、前記車両の駆動方式を取得する方式取得手段と、前記方式取得手段によって取得された前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得する特性取得手段と、前記経路探索手段によって複数の経路候補が探索された場合に、前記特性取得手段によって取得された推奨道路特性に基づき前記各経路候補のうち何れか一つの経路候補を目的地までの経路として選択し、該経路を提供する経路提供手段と、を備えることを要旨とする。
【0008】
車両走行時に発生する回生エネルギは、車載のバッテリに蓄電させておくことにより、車両の走行に利用することができる。すなわち、車両でのエネルギの推定消費量が同程度となる経路候補が複数存在する場合には、回生エネルギを最も発生させやすい経路候補がエコルートとして相応しい。そこで、本発明では、目的地までの走行に伴う車両におけるエネルギの推定消費量を少なくすることを優先条件として探索された経路候補が複数存在する場合には、車両の駆動方式に基づき、車両で回生エネルギを発生させやすい推奨道路特性が取得される。これは、車両の駆動方式によって、回生エネルギの発生させやすい推奨道路特性が異なることがあるためである。そして、取得された推奨道路特性に基づき、各経路候補のうち何れか一つの経路候補が選択され、該経路候補が目的地までの経路として車両の乗員に提供される。したがって、走行時に回生エネルギを発生可能な車両に対して、エネルギの推定消費量を少なくすることを優先条件とした経路を提供することができる。
【0009】
本発明の経路探索装置は、前記経路探索手段によって探索された経路候補を前記車両に走行させた場合における該車両の平均速度の推定値を取得する速度推定手段をさらに備え、前記特性取得手段は、前記方式取得手段によって車両が後輪駆動であることが取得された場合には、車両の平均速度の推定値が速いという特性を前記推奨道路特性として取得し、前記経路提供手段は、前記方式取得手段によって車両が後輪駆動であることが取得されると共に、前記経路探索手段によって複数の経路候補が探索された場合には、前記特性取得手段によって取得された前記推奨道路特性に基づき、当該各経路候補のうち、前記速度推定手段によって取得された平均速度の推定値が最も速い経路候補を目的地までの経路として選択する。
【0010】
駆動方式が後輪駆動となる後輪駆動車では、駆動輪である後輪に回生制動力が付与される。一方、駆動方式が前輪駆動となる前輪駆動車では、駆動輪である前輪に回生制動力が付与される。また、車両に搭載されるブレーキ装置は、一般的に、車両の車体速度に応じて、前輪と後輪との制動力配分を異ならせている。例えば、高速走行時に各車輪に制動力を付与する場合は、低速走行時に各車輪に制動力を付与する場合よりも、後輪に対する制動力の配分を多くする。言い換えると、後輪駆動車では、高速で走行する機会が多いほど、回生エネルギの発生量が多くなると推定される。
【0011】
そこで、本発明では、車両でのエネルギの推定消費量が同程度となる経路候補が複数存在する場合において車両が後輪駆動車であるときには、各経路候補を車両に走行させた場合における該車両の平均速度が推定される。そして、推定された平均速度が最も速い経路候補が、目的地までの経路として車両の乗員に提供される。したがって、車両が後輪駆動車である場合には、その制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0012】
本発明の経路探索装置において、前記速度推定手段は、前記経路探索手段によって複数の経路候補が探索された場合に、前記各経路候補のうち一の経路候補において他の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得し、前記他の経路候補において前記一の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得する。
【0013】
回生エネルギを発生させやすい経路であるか否かを判断する観点から考えると、一の経路候補において他の経路候補と重複する道路区間での平均速度を推定することの意味は余りない。そこで、本発明では、一の経路候補において他の経路候補と重複しない道路区間での平均速度が推定されると共に、他の経路候補において一の経路候補と重複しない道路区間での平均速度が推定される。そして、このように算出された各経路候補の平均速度に基づき、エコルートが選択される。そのため、車両の制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0014】
本発明の経路探索装置は、前記経路探索手段によって探索された経路候補において、前記車両の車輪に制動力が付与され得る減速要因がある道路区間を抽出する減速区間抽出手段をさらに備え、前記速度推定手段は、前記減速区間抽出手段によって抽出された道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得する。
【0015】
回生エネルギは、車両の車輪に回生制動力が付与された場合に発生するエネルギである。そのため、車両に制動力を付与して該車両を減速させる機会の少ない道路区間は、回生エネルギが発生しにくい道路区間であるということができる。そこで、本発明では、探索された経路候補において減速要因がある道路区間が抽出される。そして、抽出された道路区間での平均速度が推定される。そのため、回生エネルギが発生される可能性が高い道路区間での平均速度に基づいたエコルートを車両の乗員に提供することができる。
【0016】
本発明の経路探索装置は、地図上の道路を構成する複数の道路区間と、それらの道路区間を車両が走行した際におけるエネルギの推定消費量とを関連付けて記憶する道路区間記憶手段をさらに備え、前記経路探索手段は、前記優先条件に基づいて前記道路区間記憶手段に記憶される各道路区間を繋ぐことにより、経路候補を生成する。
【0017】
上記構成によれば、道路区間記憶手段に記憶される情報に基づき、エネルギの推定消費量が少ない経路候補が探索される。すなわち、道路区間記憶手段に記憶される各道路区間でのエネルギの推定消費量の正確性が高いほど、エコルートの探索精度を向上させることができる。
【0018】
本発明は、減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索させるための経路探索方法であって、目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、前記車両の駆動方式を取得させる方式取得ステップと、前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を有することを要旨とする。
【0019】
上記構成によれば、上記経路探索装置と同等の作用・効果を得ることができる。
本発明は、減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路の探索を制御装置に実行させるための経路探索プログラムであって、前記制御装置に、目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、前記車両の駆動方式を取得させる方式取得ステップと、前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を実行させることを要旨とする。
【0020】
上記構成によれば、上記経路探索装置と同等の作用・効果を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の経路探索装置を備える一実施形態のサーバー装置と該サーバー装置と通信するナビゲーション装置を備える車両とを説明するブロック図。
【図2】車両のナビゲーション装置を説明するブロック図。
【図3】探索された3つのルート候補を説明する模式図。
【図4】ナビゲーション装置で実行されるエコルート探索処理ルーチンを説明するフローチャート。
【図5】サーバー装置で実行されるエコルート提供処理ルーチンを説明するフローチャート。
【図6】別の平均速度算出処理ルーチンを説明するフローチャート。
【図7】他の別の平均速度算出処理ルーチンを説明するフローチャート。
【発明を実施するための形態】
【0022】
(第1の実施形態)
以下、本発明を具体化した一実施形態について、図1〜図5に従って説明する。
図1に示すように、車両10は、駆動輪11に付与する駆動力を発生する動力発生装置20と、駆動輪11及び従動輪12に付与する制動力を発生するブレーキ装置30と、目的地までのルート(経路)を乗員に案内するナビゲーション処理を行うナビゲーション装置40とを備えている。
【0023】
動力発生装置20には、ガソリンなどの化石燃料(エネルギ)に基づき駆動するエンジン21と、バッテリ(蓄電池)22に蓄電された電力(電力エネルギ)がインバータ23を介して供給された場合に駆動するモータ24とが設けられている。こうした動力発生装置20で発生した駆動力は、ディファレンシャルなどの動力伝達機構25を介して駆動輪11に伝達される。また、動力発生装置20は、エンジンECU(「エンジン用電子制御装置」ともいう。)26によって制御される。このエンジンECU26は、エンジン21の駆動に基づき車両10を走行させる第1のモードと、モータ24の駆動に基づき車両10を走行させる第2のモードとで制御態様を切り替えている。すなわち、車両10は、ハイブリッド車両である。
【0024】
本実施形態において、モータ24は、駆動力を発生させるだけではなく、駆動輪11に対して回生制動力を付与可能である。この場合、モータ24は、駆動輪11側から伝達される動力に応じて発電する。そして、このようにモータ24で発生した電力(回生エネルギ)は、インバータ23を介してバッテリ22に供給される。その結果、バッテリ22には、モータ24で発生した電力が蓄電される。
【0025】
ブレーキ装置30は、運転手による図示しないブレーキペダルの操作に応じた常用制動力を各車輪11,12に付与するための装置である。このブレーキ装置30を制御するブレーキECU(「ブレーキ用電子制御装置」ともいう。)31は、車両減速時には、ブレーキ装置30に加え、動力発生装置20のモータ24も制御する。
【0026】
本実施形態の車両10の駆動輪11には、運転手がブレーキペダル(図示略)を操作した場合、モータ24による回生制動力とブレーキ装置30による常用制動力とのうち、回生制動力が優先的に付与される。運転手によるブレーキペダル(図示略)の操作量に応じた制動力をモータ24による回生制動力のみで対応可能である場合、ブレーキECU31は、駆動輪11に対して回生制動力のみが付与されるようにモータ24を制御する。一方、運転手によるブレーキペダル(図示略)の操作量に応じた制動力をモータ24による回生制動力だけでは対応できない場合、ブレーキECU31は、駆動輪11に対して回生制動力と常用制動力とが付与されるようにモータ24及びブレーキ装置30を制御する。なお、ブレーキECU31は、従動輪12に対して常用制動力が付与されるようにブレーキ装置30を制御する。
【0027】
また、ブレーキECU31は、車両の車体速度に応じて、前輪と後輪との制動力配分を異ならせている。例えば、高速走行時に運転手がブレーキペダル(図示略)を操作した場合、ブレーキECU31は、低速走行時に運転手がブレーキペダル(図示略)を操作した場合よりも後輪に対する制動力の配分を多くする。
【0028】
つまり、車両が高速走行する際に運転手がブレーキペダル(図示略)を操作した場合、後輪駆動車のモータ24で発生する電力は、前輪駆動車のモータ24で発生する電力よりも多くなる。その一方で、車両が低速走行する際に運転手がブレーキペダル(図示略)を操作した場合、前輪駆動車のモータ24で発生する電力は、後輪駆動車のモータ24で発生する電力よりも多くなる。
【0029】
次に、ナビゲーション装置40について、図1及び図2を参照して説明する。
図1に示すように、ナビゲーション装置40は、表示装置41と、該表示装置41を制御するナビ制御装置50とを備えている。表示装置41には、車両の乗員に各種情報を視認可能な状態で提供するディスプレイ42と、該ディスプレイ42の前面に配置される液晶のタッチパネル43とが設けられている。また、表示装置41においてディスプレイ42の側方には、複数種類の操作ボタン44が設けられている。
【0030】
こうした表示装置41は、乗員による操作ボタン44及びタッチパネル43の操作を受付けた場合、その操作内容に応じた信号をナビ制御装置50に出力する。そして、表示装置41では、出力した信号の返答としてナビ制御装置50からの画像データが入力されると、該画像データに基づいた画像がディスプレイ42に表示される。
【0031】
ナビ制御装置50には、位置検出部60が情報を送信可能な状態で車両側I/F51を介して接続されている。位置検出部60は、GPS受信部61、車速センサ62及びジャイロセンサ63を有している。ナビ制御装置50は、GPS受信部61によって受信された受信信号に基づき、電波航法によって緯度・経度などの絶対位置を検出する。また、ナビ制御装置50は、車速センサ62及びジャイロセンサ63からの検出信号に基づき、自律航法を用いて基準位置からの相対位置を算出する。そして、ナビ制御装置50は、検出した絶対位置及び算出した相対位置を組み合わせて車両の現在地を特定する。なお、GPSとは、「Global Positioning System 」の略記である。
【0032】
ナビ制御装置50は、制御部52、画像処理プロセッサ53及び情報記憶装置54を備えている。また、ナビ制御装置50には、車外に設けられたサーバー装置70と各種情報の送受信を行う通信部55が設けられている。
【0033】
制御部52は、CPU520、ROM521及びRAM522などで構成されている。ROM521には、目的地までのルート(経路)の探索や案内をするためのプログラムなどが記憶されている。RAM522には、CPU520の作業領域及び探索されたルートなどを記憶する記憶領域が形成される。
【0034】
画像処理プロセッサ53は、制御部52からの制御信号に基づいてディスプレイ42に表示するための各種の画像データを生成し、該生成した画像データを表示装置41に出力する。例えば、車両の現在位置から目的地までのルートが制御部52で探索された場合、画像処理プロセッサ53は、探索されたルートと、該ルートに沿った案内の開始の許可を求める画面となどを表示させるための画像データを生成し、該画像データに基づく画像をディスプレイ42に表示させる。
【0035】
情報記憶装置54は、ハードディスクや光ディスクなどの外部記憶媒体である。こうした情報記憶装置54には、地図データ記憶部540、探索データ記憶部541及び施設データ記憶部542が形成されている。地図データ記憶部540は、道路地図、住宅地図及び建物形状地図などの地図データを記憶している。探索データ記憶部541は、複数の地点(「ノード」ともいう。)、各地点を結ぶ道路区間(「リンク」ともいう。)及び各道路区間の距離などといった各種道路情報に関するデータを記憶している。施設データ記憶部542は、飲食店、ガソリンスタンド、病院、駐車場などの各種施設及び該各種施設の住所や電話番号などの施設データを記憶している。
【0036】
本実施形態のナビゲーション装置40は、その内部で目的地までのルートを探索するだけではなく、サーバー装置70で探索されたルートに沿ったナビゲーション処理を行うことが可能である。この場合、車両10の乗員によって目的地が設定されると、ナビ制御装置50は、車両10の現在位置、目的地及び車両10の駆動方式を特定するためのルート探索必要情報をサーバー装置70に送信する。すると、ナビ制御装置50は、現在位置から目的地までのルートを特定するためのルート情報をサーバー装置70から受信し、該受信したルート情報が示すルートを制御部52のRAM522に記憶させる。そして、ナビ制御装置50は、表示装置41を用い、サーバー装置70で探索されたルートに沿ったナビゲーション処理を行う。
【0037】
また、ナビゲーション装置40は、車両10の走行時に取得されたプローブ情報をサーバー装置70に送信する。本実施形態のナビゲーション装置40が送信するプローブ情報としては、車両10が走行した各道路区間での車両の車体速度、各道路区間での化石燃料(エネルギ)の消費量、及び車輪11,12に制動力が付与され得る減速要因のある道路区間などを特定するための情報が挙げられる。
【0038】
なお、プローブ情報として送信される道路区間での化石燃料の消費量とは、道路区間を上記第1のモードで車両が走行した際、即ちエンジン21の駆動のみで車両が走行した際に該車両で消費された化石燃料の消費量のことを示している。また、減速要因のある道路区間としては、例えば、交通ルールとして一時停止しなくてはならない箇所を有する道路区間、信号のある道路区間、交通渋滞が発生している道路区間、車両10の旋回半径が基準値以上となる急カーブを有する道路区間、及び料金所が存在する道路区間(有料道路などの一区間)が挙げられる。
【0039】
次に、経路探索装置の一例としてのサーバー装置70について、図1を参照して説明する。
図1に示すように、サーバー装置70は、ナビゲーション装置40と通信するための通信部(情報受信手段)71と、該通信部71がナビゲーション装置40から受信した情報に基づいた処理を行うサーバー制御装置(制御装置)72と、該サーバー制御装置72がルート探索を行う際に必要な情報を管理するデータベース73とを備えている。通信部71は、ナビゲーション装置40から送信されたプローブ情報及びルート探索必要情報を受信し、該受信した各種情報をサーバー制御装置72に出力する。また、通信部71は、サーバー制御装置72によって探索されたルートを特定するためのルート情報をナビゲーション装置40に送信する。
【0040】
サーバー制御装置72は、CPU720、ROM721及びRAM722などで構成されている。こうしたサーバー制御装置72は、通信部71からプローブ情報が入力された場合、該プローブ情報をデータベース73に登録する。また、サーバー制御装置72は、通信部71からルート探索必要情報が入力された場合、該ルート探索必要情報が示す車両10の現在位置、目的地及び車両10の駆動方式を取得する。そして、サーバー制御装置72は、取得した車両10の現在位置から目的地までのルートを、データベース73を用いて探索し、探索したルートを特定するためのルート情報を通信部71に出力する。
【0041】
データベース73には、サーバー制御装置72によるルート探索を行うために必要な各種情報が記憶されている。すなわち、データベース73には、複数の地点、各地点を結ぶ道路区間及び各道路区間の距離などに関する情報が記憶されている。また、データベース73には、道路区間を走行する際の車両の推定平均速度、及び道路区間を走行する際に車両で消費される化石燃料(エネルギ)の推定消費量が道路区間毎に互いに関連付けられて記憶されている。したがって、本実施形態では、データベース73が、地図上の道路を構成する複数の道路区間と、それらの道路区間をエンジン21のみの駆動で車両が走行した際における化石燃料の推定消費量とを関連付けて記憶する道路区間記憶手段として機能する。
【0042】
本実施形態のサーバー装置70では、目的地までの走行に伴う車両における化石燃料の推定消費量を少なくすることを優先条件として、ルート探索が行われる。こうした優先条件の基でルート探索を行った場合、図3に示すように、化石燃料の推定消費量が同程度となる複数(図3では3つ)のルート候補(経路候補)が、エコルートの候補として探索されることがある。なお、「エコルート」とは、化石燃料の消費効率のよい経路のことを示している。
【0043】
これら第1、第2及び第3の各ルート候補は、現在位置PSから、第1の地点P1、第2の地点P2、第3の地点P3、第4の地点P4を経由して目的地PGに到着するルートである。第1のルート候補は、現在位置PSから第1の地点P1までの道路区間R1−1、第1の地点P1から第2の地点P2までの道路区間R1−2、第2の地点P2から第3の地点P3までの道路区間R1−3、第3の地点P3から第4の地点P4までの道路区間R1−4及び第4の地点P4から目的地PGまでの道路区間R1−5を繋いだルートである。第2のルート候補(一の経路候補)は、第1のルート候補(他の経路候補)と重複する道路区間と、重複しない道路区間とを有している。また、第3のルート候補(一の経路候補)は、第1及び第2の各ルート候補(他の経路候補)と重複する道路区間と、重複しない道路区間とを有している。
【0044】
第2のルート候補の現在位置PSから第1の地点P1までの道路区間R2−1は、第1のルート候補の道路区間R1−1と同一である。また、第2のルート候補の第1の地点P1から第2の地点P2までの道路区間R2−2は、第1のルート候補の道路区間R1−2とは異なる。また、第2のルート候補の第2の地点P2から第3の地点P3までの道路区間R2−3は、第1のルート候補の道路区間R1−3と同一である。また、第2のルート候補の第3の地点P3から第4の地点P4までの道路区間R2−4は、第1のルート候補の道路区間R1−4とは異なる。そして、第2のルート候補の第4の地点P4から目的地PGまでの道路区間R2−5は、第1のルート候補の道路区間R1−5と同一である。
【0045】
第3のルート候補の現在位置PSから第1の地点P1までの道路区間R3−1は、第1及び第2のルート候補の道路区間R1−1,R2−1と同一である。また、第3のルート候補の第1の地点P1から第2の地点P2までの道路区間R3−2は、第1及び第2のルート候補の道路区間R1−2,R2−2とは異なる。また、第3ルート候補の第2の地点P2から第3の地点P3までの道路区間R3−3は、第1及び第2のルート候補の道路区間R1−3,R2−3と同一である。また、第3ルート候補の第3の地点P3から第4の地点P4までの道路区間R3−4は、第1及び第2のルート候補の道路区間R1−4,R2−4とは異なる。そして、第3のルート候補の第4の地点P4から目的地PGまでの道路区間R3−5は、第1及び第2のルート候補の道路区間R1−5,R2−5と同一である。
【0046】
ところで、ハイブリッド車両では、車両の減速時にモータ24で電力(回生エネルギ)が発生してバッテリ(蓄電池)22に蓄電される。こうして蓄電された電力は、モータ24を用いた車両走行時に使用される。そのため、ハイブリッド車両の場合には、化石燃料の推定消費量だけではなく、走行時に蓄電可能な電力量も考慮したルート候補が、エコルートとして相応しい。
【0047】
そこで、ハイブリッド車両に対するエコルートを設定するためにナビゲーション装置40及びサーバー装置70で実行される各種処理ルーチンについて、図4及び図5に示すフローチャートを参照して説明する。
【0048】
始めに、車両10の現在位置から目的地までのエコルートをサーバー装置70から提供を受ける際にナビゲーション装置40のナビ制御装置50が実行するエコルート探索処理ルーチンを、図4に示すフローチャートを参照して説明する。
【0049】
さて、エコルート探索処理ルーチンは、車両10の乗員による入力によって目的地が設定されたことを契機に実行される。そして、エコルート探索処理ルーチンにおいて、ナビ制御装置50は、車両10の現在位置を出発地として取得すると共に、設定された目的地を取得する(ステップS10)。続いて、ナビ制御装置50は、車両10の駆動方式(前輪駆動又は後輪駆動)を取得する(ステップS11)。そして、ナビ制御装置50は、取得した出発地、目的地及び駆動方式を特定するための探索必要情報をサーバー装置70に送信する(ステップS12)。
【0050】
続いて、ナビ制御装置50は、サーバー装置70で探索されたエコルートを特定するためのルート情報を、サーバー装置70から受信したか否かを判定する(ステップS13)。ルート情報を未受信である場合(ステップS13:NO)、ナビ制御装置50は、ルート情報を受信するまでステップS13の判定処理を繰り返し実行する。この間、ナビ制御装置50は、エコルートを探索中である旨のメッセージをディスプレイ42に表示させる。一方、ルート情報を受信した場合(ステップS13:YES)、ナビ制御装置50は、受信したルート情報をRAM522に記憶させ、エコルート探索処理ルーチンを終了する。その後、ナビ制御装置50は、RAM522に記憶したルート情報が示すエコルートに沿ったナビゲーション処理を開始する。
【0051】
次に、車両10から受信した探索必要情報に基づいたエコルートを車両側に提供するためにサーバー装置70のサーバー制御装置72が実行するエコルート提供処理ルーチンを、図5に示すフローチャートを参照して説明する。
【0052】
さて、エコルート提供処理ルーチンは、予め設定された所定周期毎(例えば、0.1秒毎)に実行される。そして、エコルート提供処理ルーチンにおいて、サーバー制御装置72は、車両10のナビゲーション装置40から探索必要情報を、通信部71で受信したか否かを判定する(ステップS20)。探索必要情報は、上述したように、出発地、目的地及び車両10の駆動方式を特定するための情報である。そのため、探索必要情報を受信したということは、車両10の駆動方式を取得したことと等しい。したがって、本実施形態では、サーバー制御装置72が、方式取得手段としても機能する。また、ステップS20が、方式取得ステップに相当する。
【0053】
そして、探索必要情報を未受信である場合(ステップS20:NO)、サーバー制御装置72は、エコルート提供処理ルーチンを一旦終了する。一方、探索必要情報を受信した場合(ステップS20:YES)、サーバー制御装置72は、受信した探索必要情報が示す出発地から目的地までのルート候補(経路候補)を探索するルート候補探索処理を行う(ステップS21)。ここでは、サーバー制御装置72は、目的地までの走行に伴う車両10における化石燃料の推定消費量を少なくすることを優先条件としてルート候補を探索する。すなわち、サーバー制御装置72は、化石燃料の推定消費量が少ない道路区間を繋いだルート候補を生成する。このとき、サーバー制御装置72は、エンジン21のみを駆動源として車両10を走行させた際に、化石燃料の消費量が少ないと推定されるルート候補を探索する。したがって、本実施形態では、サーバー制御装置72が、経路探索手段として機能する。また、ステップS21が、経路探索ステップに相当する。
【0054】
続いて、サーバー制御装置72は、化石燃料の推定消費量が同程度となるルート候補が複数有るか否かを判定する(ステップS22)。ここでいう「推定消費量が同程度となるルート候補」とは、推定消費量が完全一致するルート候補であるとは限らない。例えば、化石燃料の推定消費量が最少となるルート候補と、該最少となるルート候補の推定消費量に対してオフセット量を加算した基準値以下の推定消費量のルート候補とを、「推定消費量が同程度となるルート候補」といってもよい。なお、オフセット量を、予め設定された所定量としてもよいし、出発地から目的地までの直線距離が長いほど大きな値としてもよい。
【0055】
そして、ステップS21で探索されたルート候補が1つのみである場合(ステップS22:NO)、サーバー制御装置72は、その処理を後述するステップS27に移行する。一方、ステップS21で探索されたルート候補が複数有る場合(ステップS22:YES)、サーバー制御装置72は、各ルート候補の平均速度Vaveを算出する(ステップS23)。ルート候補の平均速度Vaveとは、ルート候補を車両10に走行させた際における該車両10の平均車体速度の推定値のことを示す。したがって、本実施形態では、サーバー制御装置72が、速度推定手段としても機能する。
【0056】
ここで、ルート候補の平均速度Vaveの算出の一例として、上記第1のルート候補の平均速度Vaveの算出について説明する。
サーバー制御装置72は、第1のルート候補を構成する各道路区間R1−1,R1−2,R1−3,R1−4,R1−5での平均速度(V1,V2,V3,V4,V5)と、各道路区間R1−1,R1−2,R1−3,R1−4,R1−5の走行距離(L1,L2,L3,L4,L5)とを、データベース73から読み出す。そして、サーバー制御装置72は、以下に示す関係式(式1)(式2)を用いて、第1のルート候補の平均速度Vaveを算出する。なお、平均速度(V1)は道路区間R1−1での平均速度を示すと共に、走行距離(L1)は道路区間R1−1の走行距離を示している。
【0057】
【数1】
ただし、L_all…第1のルート候補の走行距離
続いて、サーバー制御装置72は、探索必要情報を送信した車両10が後輪駆動車であるか否かを判定する(ステップS24)。後輪駆動車である場合(ステップS24:YES)、サーバー制御装置72は、後輪駆動車で回生エネルギを発生させやすい推奨道路特性として、平均速度Vaveが速いという特性を取得し、各ルート候補のうち平均速度Vaveが最も速いルート候補を抽出する(ステップS25)。したがって、本実施形態では、サーバー制御装置72が、車両10の駆動方式に基づき、該車両10で回生エネルギを発生させやすい推奨道路特性を取得する特性取得手段としても機能する。また、ステップS25が、特性取得ステップに相当する。その後、サーバー制御装置72は、その処理を後述するステップS27に移行する。
【0058】
一方、前輪駆動車である場合(ステップS24:NO)、サーバー制御装置72は、前輪駆動車で回生エネルギを発生させやすい推奨道路特性として、平均速度Vaveが遅いという特性を取得し、各ルート候補のうち平均速度Vaveが最も遅いルート候補を抽出する(ステップS26)。したがって、本実施形態では、ステップS26が、特性取得ステップに相当する。その後、サーバー制御装置72は、その処理を次のステップS27に移行する。
【0059】
ステップS27において、サーバー制御装置72は、抽出したルート候補をエコルートと設定する。このとき、ルート候補が1つのみ探索された場合には、サーバー制御装置72は、唯一のルート候補をエコルートと設定する。続いて、サーバー制御装置72は、設定したエコルートを特定するためのルート情報を、探索必要情報を送信した車両10のナビゲーション装置40に通信部71から送信させる(ステップS28)。すなわち、ステップS28では、設定したエコルートを、車両10の乗員に対して提供する。したがって、本実施形態では、サーバー制御装置72及び通信部71により、複数のルート候補が探索された場合に、取得された推奨道路特性に基づき各ルート候補のうち何れか一つのルート候補を目的地までのエコルートとして選択し、該エコルートを提供する経路提供手段が構成される。また、ステップS25,S26,S27,S28により、サーバー制御装置72にエコルートを車両側に提供させる経路提供ステップが構成される。その後、サーバー制御装置72は、エコルート提供処理ルーチンを一旦終了する。
【0060】
化石燃料の推定消費量が同程度となる各ルート候補の平均速度Vaveは、互いに異なる。そして、後輪駆動車である場合には、平均速度Vaveが最も速いルート候補がエコルートに設定される。一方、前輪駆動車である場合には、平均速度Vaveが最も遅いルート候補がエコルートに設定される。
【0061】
したがって、本実施形態では、以下に示す効果を得ることができる。
(1)本実施形態では、目的地までの走行に伴う車両10における化石燃料の推定消費量を少なくすることを優先条件として探索されたルート候補が複数存在する場合には、車両10の駆動方式に基づき、車両で回生エネルギを発生させやすい推奨道路特性が取得される。これは、車両10の駆動方式によって、回生エネルギの発生させやすい推奨道路特性が異なることがあるためである。そして、取得された推奨道路特性に基づき、各ルート候補のうち何れか一つのルート候補が選択され、該ルート候補が、目的地までのエコルートとして車両10の乗員に提供される。したがって、走行時に回生エネルギを発生可能な車両10に対して、化石燃料の推定消費量を少なくすることを優先条件としたエコルートを提供することができる。
【0062】
そして、提供されたエコルートに沿って運転手が車両10を走行させた場合には、車両10(即ち、ハイブリッド車両)での化石燃料の消費量を少なくさせることができる。
(2)本実施形態では、車両10での化石燃料の推定消費量が同程度となるルート候補が複数存在する場合において車両10が後輪駆動車であるときには、各ルート候補を車両に走行させた場合における該車両の平均速度Vaveが算出される。そして、算出された平均速度Vaveが最も速いルート候補が、エコルートとして車両10の乗員に提供される。したがって、車両10が後輪駆動車である場合には、その制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0063】
また、車両10での化石燃料の推定消費量が同程度となるルート候補が複数存在する場合において車両10が前輪駆動車であるときには、算出された平均速度Vaveが最も遅いルート候補が、エコルートとして車両10の乗員に提供される。したがって、車両10が前輪駆動車である場合には、その制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0064】
(3)データベース73に記憶される情報に基づき、車両10での化石燃料の推定消費量が少ないルート候補が探索される。すなわち、データベース73に記憶される各道路区間での化石燃料の推定消費量の正確性が高いほど、エコルートの探索精度を向上させることができる。
【0065】
(第2の実施形態)
次に、本発明の第2の実施形態を図6に従って説明する。なお、第2の実施形態は、上記ステップS23の処理の内容が第1の実施形態と異なっている。したがって、以下の説明においては、第1の実施形態と相違する部分について主に説明するものとし、第1の実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0066】
ルート候補の平均速度Vaveの算出を算出するための平均速度算出処理ルーチンについて、図6に示すフローチャートを参照して説明する。
さて、平均速度算出処理ルーチンにおいて、サーバー制御装置72は、上記ステップS21で探索したルート候補の候補数Nを取得し(ステップS30)、計数Kに「1」をセットする(ステップS31)。そして、サーバー制御装置72は、第Kのルート候補において他の何れのルート候補(他の何れの経路候補)とも重複していない道路区間を非重複区間として抽出する(ステップS32)。続いて、サーバー制御装置72は、抽出した非重複区間での平均速度Vave(K)を算出する(ステップS33)。すなわち、第Kのルート候補が一の経路候補に相当し、他のルート候補が他の経路候補に相当する。
【0067】
ここで、ステップS32,S33での各処理について、図3に示す場合を例にとって説明する。この場合、候補数Nは「3」となる。
計数Kが「1」である場合、サーバー制御装置72は、道路区間R1−2,R1−4を非重複区間とする。そして、サーバー制御装置72は、上記関係式(式1)(式2)を用いて、非重複区間での平均速度Vave(1)を算出する。ただし、サーバー制御装置72は、他のルート候補と重複する道路区間R1−1,R1−3,R1−5の距離(L1,L3,L5)には「0(零)」をセットする。その結果、非重複区間の平均速度Vave(K)が算出される。
【0068】
そして、ステップS33の処理が終了すると、サーバー制御装置72は、計数Kを「1」だけインクリメントする(ステップS34)。続いて、サーバー制御装置72は、更新した計数Kが候補数Nよりも大きいか否かを判定する(ステップS35)。計数Kが候補数N以下である場合(ステップS35:NO)、サーバー制御装置72は、非重複区間での平均速度を算出していないルート候補があると判断し、その処理を前述したステップS32に移行する。一方、計数Kが候補数Nよりも大きい場合(ステップS35:YES)、サーバー制御装置72は、全てのルート候補における非重複区間での平均速度を算出したと判断し、平均速度算出処理ルーチンを終了する。
【0069】
なお、ここでは、一のルート候補の一部が他のルート候補と一致していない場合について説明した。しかし、場合によっては、一のルート候補が他のルート候補と全く重複しないことがある。この場合は、上記第1の実施形態と同様の方法で、各ルート候補の平均速度Vaveが算出される。
【0070】
したがって、本実施形態では、上記第1の実施形態の効果(1)〜(3)の効果に加え、以下に示す効果を得ることができる。
(4)本実施形態では、一のルート候補において他のルート候補と重複しない非重複区間(他の何れのルート候補とも重複しない道路区間)での平均速度Vaveが推定されると共に、他のルート候補において一のルート候補と重複しない非重複区間での平均速度Vaveが推定される。そして、このように算出された各ルート候補の平均速度Vaveに基づき、エコルートが選択される。そのため、車両の制動特性に基づいたエコルートを車両の乗員に提供することができる。
【0071】
(第3の実施形態)
次に、本発明の第3の実施形態を図7に従って説明する。なお、第3の実施形態は、平均速度算出処理ルーチンの内容が第2の実施形態と異なっている。したがって、以下の説明においては、第2の実施形態と相違する部分について主に説明するものとし、第1及び第2の各実施形態と同一又は相当する部材構成には同一符号を付して重複説明を省略するものとする。
【0072】
本実施形態の平均速度算出処理ルーチンについて、図7に示すフローチャートを参照して説明する。
さて、平均速度算出処理ルーチンにおいて、サーバー制御装置72は、上記ステップS30,S31の各処理に相当するステップS40,S41の処理を順次実行する。続いて、サーバー制御装置72は、第Kのルート候補を構成する各道路区間の中に、上記減速要因のある道路区間があるか否かを判定する(ステップS42)。具体的には、サーバー制御装置72は、第Kのルート候補を構成する各道路区間に関する情報をデータベース73から取得し、取得した情報の中に減速要因に関する情報があるか否かを判定する。
【0073】
減速要因のある道路区間がない場合(ステップS42:NO)、サーバー制御装置72は、第Kのルート候補の平均速度Vave(K)を「0(零)」と設定し(ステップS43)、その処理を後述するステップS46に移行する。一方、減速要因のある道路区間がある場合(ステップS42:YES)、サーバー制御装置72は、第Kのルート候補を構成する各道路区間の中から減速要因のある道路区間を抽出し、該減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間であるか否かを判定する(ステップS44)。例えば、第1のルート候補の道路区間R1−1に減速要因がある場合、サーバー制御装置72は、減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間ではないと判定する(図3参照)。その一方で、第1のルート候補の道路区間R1−2に減速要因がある場合、サーバー制御装置72は、減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間であると判定する。したがって、本実施形態では、サーバー制御装置72が、減速区間抽出手段としても機能する。
【0074】
減速要因のある道路区間が他のルート候補と重複する道路区間である場合(ステップS44:NO)、サーバー制御装置72は、その処理を前述したステップS43に移行する。一方、減速要因のある道路区間が他の何れのルート候補とも重複しない道路区間である場合(ステップS44:YES)、サーバー制御装置72は、減速要因があること(第1の条件)、及び他の何れのルート候補とも重複しないこと(第2の条件)を満たす道路区間での平均速度Vave(K)を、上記関係式(式1)(式2)を用いて算出する(ステップS45)。すなわち、サーバー制御装置72は、第1及び第2の各条件を満たさない道路区間の距離には「0(零)」をセットした状態で、平均速度Vave(K)算出する。続いて、サーバー制御装置72は、その処理を次のステップS46に移行する。
【0075】
ステップS46において、サーバー制御装置72は、計数Kを「1」だけインクリメントする。そして、サーバー制御装置72は、上記ステップS35の判定処理と同等のステップS47の判定処理を行う。
【0076】
したがって、本実施形態では、上記各実施形態の効果(1)〜(4)の効果に加え、以下に示す効果を得ることができる。
(5)回生エネルギは、車両10の駆動輪11に回生制動力が付与された場合に発生するエネルギである。そのため、車両10に制動力を付与して該車両10を減速させる機会の少ないルート候補は、回生エネルギが発生しにくいルートであるということができる。そこで、本実施形態では、探索されたルート候補において減速要因がある道路区間が抽出される。そして、抽出された道路区間での平均速度Vave(K)が推定される。そのため、回生エネルギが発生する可能性が高いルート候補を、エコルートとして車両の乗員に提供することができる。
【0077】
なお、上記各実施形態は、以下のような別の実施形態に変更してもよい。
・各実施形態において、データベース73には、VICS(登録商標)情報を登録させてもよい。なお、VICSは「Vehicle Information and Communication」の略記である。
【0078】
・第3の実施形態において、ステップS44の判定処理を省略してもよい。
・各実施形態において、化石燃料の推定消費量を少なくするという優先条件に基づき、ルート候補を探索する場合、推定消費量の少ない順の上位M個(Mは2以上の整数であって、例えば、3個)のルート候補を探索するようにしてもよい。
【0079】
・第1の実施形態において、ルート候補の平均速度Vaveは、該ルート候補を構成する各道路区間の平均速度の平均値であってもよい。
・車両減速時に発生する回生エネルギの発生量は、駆動輪11に大きな回生制動力が付与されるほど多くなる。そのため、各ルート候補の平均速度Vaveに大きな差がある場合には、前輪駆動車であっても、平均速度Vaveが速いルート候補のほうが、エコルートとして相応しいことがある。
【0080】
そこで、各ルート候補のうち平均速度Vaveが最も速いルート候補を最速候補とする。そして、最速候補の平均速度Vaveに所定のゲイン値(0(零)よりも大きく且つ1よりも小さい値であって、例えば0.9)を乗算して判定速度を算出する。そして、判定速度よりも遅い平均速度Vaveのルート候補がない場合には、各ルート候補のうち、平均速度Vaveが最も遅いルート候補を前輪駆動車に対してエコルートとして提供してもよい。
【0081】
その一方で、判定速度よりも遅い平均速度Vaveのルート候補がある場合には、判定速度よりも遅い平均速度Vaveのルート候補を除き、残りのルート候補の中から、平均速度Vaveが最も遅いルート候補を前輪駆動車に対してエコルートとして提供してもよい。この場合、車両10が前輪駆動車であっても後輪駆動車であっても、同一のルート候補がエコルートとして提供されることがある。
【0082】
・車両10が登坂路を走行する場合、車両重心は、車体後方に移動しやすい。そのため、登坂路走行時において車両10の減速時には、後輪への制動力の配分が高めに設定される。一方、車両10が降坂路を走行する場合、車両重心は、車体前方に移動しやすい。そのため、降坂路走行時において車両10の減速時には、前輪への制動力の配分が高めに設定される。
【0083】
そこで、こうした制動特性を有する車両において当該車両が後輪駆動車である場合には、登坂路となる道路区間が最も多いルート候補をエコルートとしてもよい。また、当該車両が前輪駆動車である場合には、降坂路となる道路区間が最も多いルート候補をエコルートとしてもよい。
【0084】
・各実施形態において、サーバー装置70に探索必要情報を送信するナビゲーション装置は、車載のナビゲーション装置ではなく、ナビゲーション機能を有する携帯型の情報端末(例えば、携帯電話)であってもよい。
【0085】
・各実施形態において、各道路区間での平均車体速度や交通渋滞の有無などをナビゲーション装置40で取得可能である場合には、該ナビゲーション装置40で、エコルートを探索させてもよい。この場合、ナビゲーション装置40が、経路探索装置として機能することになる。
【0086】
・各実施形態において、サーバー装置70と通信可能なナビゲーション装置40を搭載する車両は、電気自動車であってもよいし、プラグインハイブリッド車両であってもよい。こうした場合、サーバー制御装置72は、目的地までの走行に伴う車両における電力エネルギの推定消費量を少なくすることを優先条件として経路候補を探索することになる。つまり、経路探索手段は、目的地までの走行で使用されるエネルギの推定消費量を少なくすることを優先条件としてルート候補を探索する。
【0087】
次に、上記各実施形態及び別の実施形態から把握できる技術的思想を以下に追記する。
(イ)前記車両の出発地、目的地及び前記車両の駆動方式を特定するための情報を、該車両のナビゲーション装置から受信する情報受信手段をさらに備え、
前記方式取得手段は、前記情報受信手段によって受信された情報が示す駆動方式を取得し、
前記経路探索手段は、前記情報受信手段によって受信された情報が示す出発地及び目的地を取得し、前記優先条件に基づき経路候補を探索し、
前記経路提供手段は、前記経路探索手段によって複数の経路候補が探索された場合に、前記特性取得手段によって取得された推奨道路特性に基づき、前記各経路候補のうち何れか一つの経路候補を選択し、該経路候補を特定するための経路情報を前記ナビゲーション装置に送信することを特徴とする経路探索装置。
【0088】
上記構成によれば、車両のナビゲーション装置から情報を受信した場合には、該情報が示す出発地、目的地及び前記車両の駆動方式に基づいた経路が探索される。そして、このように探索された経路を特定するための経路情報がナビゲーション装置に送信される。その結果、ナビゲーション装置は、エネルギの消費量及び走行中に発生し得る回生エネルギを考慮したエコルートを車両の乗員に案内することができる。
【0089】
(ロ)前記速度推定手段は、
前記経路探索手段によって複数の経路候補が探索された場合に、
他の何れの経路候補とも重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を、前記経路候補毎に取得することを特徴とする記載の経路探索装置。
【符号の説明】
【0090】
10…車両、11,12…車輪、22…バッテリ、24…モータ、40…経路探索装置の一例としてのナビゲーション装置、70…経路探索装置の一例としてのサーバー装置、71…経路提供手段を構成する通信部(情報受信手段)、72…経路提供手段を構成するサーバー制御装置(経路探索手段、方式取得手段、特性取得手段、速度推定手段、減速区間抽出手段、制御装置)、R1−1〜R1−5,R2−1〜R2−5,R3−1〜R3−5…道路区間。
【特許請求の範囲】
【請求項1】
減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索する経路探索装置であって、
目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索する経路探索手段と、
前記車両の駆動方式を取得する方式取得手段と、
前記方式取得手段によって取得された前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得する特性取得手段と、
前記経路探索手段によって複数の経路候補が探索された場合に、前記特性取得手段によって取得された推奨道路特性に基づき前記各経路候補のうち何れか一つの経路候補を目的地までの経路として選択し、該経路を提供する経路提供手段と、を備えることを特徴とする経路探索装置。
【請求項2】
前記経路探索手段によって探索された経路候補を前記車両に走行させた場合における該車両の平均速度の推定値を取得する速度推定手段をさらに備え、
前記特性取得手段は、前記方式取得手段によって車両が後輪駆動であることが取得された場合には、車両の平均速度の推定値が速いという特性を前記推奨道路特性として取得し、
前記経路提供手段は、
前記方式取得手段によって車両が後輪駆動であることが取得されると共に、前記経路探索手段によって複数の経路候補が探索された場合には、
前記特性取得手段によって取得された前記推奨道路特性に基づき、当該各経路候補のうち、前記速度推定手段によって取得された平均速度の推定値が最も速い経路候補を目的地までの経路として選択することを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記速度推定手段は、
前記経路探索手段によって複数の経路候補が探索された場合に、
前記各経路候補のうち一の経路候補において他の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得し、
前記他の経路候補において前記一の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得することを特徴とする請求項2に記載の経路探索装置。
【請求項4】
前記経路探索手段によって探索された経路候補において、前記車両の車輪に制動力が付与され得る減速要因がある道路区間を抽出する減速区間抽出手段をさらに備え、
前記速度推定手段は、前記減速区間抽出手段によって抽出された道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得することを特徴とする請求項2又は請求項3に記載の経路探索装置。
【請求項5】
地図上の道路を構成する複数の道路区間と、それらの道路区間を車両が走行した際におけるエネルギの推定消費量とを関連付けて記憶する道路区間記憶手段をさらに備え、
前記経路探索手段は、前記優先条件に基づいて前記道路区間記憶手段に記憶される各道路区間を繋ぐことにより、経路候補を生成することを特徴とする請求項1〜請求項4のうち何れか一項に記載の経路探索装置。
【請求項6】
減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索させるための経路探索方法であって、
目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、
前記車両の駆動方式を取得させる方式取得ステップと、
前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、
前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を有することを特徴とする経路探索方法。
【請求項7】
減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路の探索を制御装置に実行させるための経路探索プログラムであって、
前記制御装置に、
目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、
前記車両の駆動方式を取得させる方式取得ステップと、
前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、
前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を実行させることを特徴とする経路探索プログラム。
【請求項1】
減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索する経路探索装置であって、
目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索する経路探索手段と、
前記車両の駆動方式を取得する方式取得手段と、
前記方式取得手段によって取得された前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得する特性取得手段と、
前記経路探索手段によって複数の経路候補が探索された場合に、前記特性取得手段によって取得された推奨道路特性に基づき前記各経路候補のうち何れか一つの経路候補を目的地までの経路として選択し、該経路を提供する経路提供手段と、を備えることを特徴とする経路探索装置。
【請求項2】
前記経路探索手段によって探索された経路候補を前記車両に走行させた場合における該車両の平均速度の推定値を取得する速度推定手段をさらに備え、
前記特性取得手段は、前記方式取得手段によって車両が後輪駆動であることが取得された場合には、車両の平均速度の推定値が速いという特性を前記推奨道路特性として取得し、
前記経路提供手段は、
前記方式取得手段によって車両が後輪駆動であることが取得されると共に、前記経路探索手段によって複数の経路候補が探索された場合には、
前記特性取得手段によって取得された前記推奨道路特性に基づき、当該各経路候補のうち、前記速度推定手段によって取得された平均速度の推定値が最も速い経路候補を目的地までの経路として選択することを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記速度推定手段は、
前記経路探索手段によって複数の経路候補が探索された場合に、
前記各経路候補のうち一の経路候補において他の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得し、
前記他の経路候補において前記一の経路候補と重複しない道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得することを特徴とする請求項2に記載の経路探索装置。
【請求項4】
前記経路探索手段によって探索された経路候補において、前記車両の車輪に制動力が付与され得る減速要因がある道路区間を抽出する減速区間抽出手段をさらに備え、
前記速度推定手段は、前記減速区間抽出手段によって抽出された道路区間を前記車両に走行させた場合における該車両の平均速度の推定値を取得することを特徴とする請求項2又は請求項3に記載の経路探索装置。
【請求項5】
地図上の道路を構成する複数の道路区間と、それらの道路区間を車両が走行した際におけるエネルギの推定消費量とを関連付けて記憶する道路区間記憶手段をさらに備え、
前記経路探索手段は、前記優先条件に基づいて前記道路区間記憶手段に記憶される各道路区間を繋ぐことにより、経路候補を生成することを特徴とする請求項1〜請求項4のうち何れか一項に記載の経路探索装置。
【請求項6】
減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路を探索させるための経路探索方法であって、
目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、
前記車両の駆動方式を取得させる方式取得ステップと、
前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、
前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を有することを特徴とする経路探索方法。
【請求項7】
減速時にモータから発生する回生エネルギをバッテリに蓄電し、該バッテリに蓄電される電力エネルギを利用した走行が可能な車両の経路の探索を制御装置に実行させるための経路探索プログラムであって、
前記制御装置に、
目的地までの走行に伴う前記車両におけるエネルギの推定消費量を少なくすることを優先条件として経路候補を探索させる経路探索ステップと、
前記車両の駆動方式を取得させる方式取得ステップと、
前記方式取得ステップで取得した前記車両の駆動方式に基づき、該車両で回生エネルギを発生させやすい推奨道路特性を取得させる特性取得ステップと、
前記経路探索ステップで複数の経路候補を探索した場合に、前記特性取得ステップで取得した推奨道路特性に基づき該各経路候補のうち何れか一つの経路候補を目的地までの経路として選択させ、該経路を提供させる経路提供ステップと、を実行させることを特徴とする経路探索プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−150004(P2012−150004A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−8891(P2011−8891)
【出願日】平成23年1月19日(2011.1.19)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月19日(2011.1.19)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]