
経路探索装置及び経路情報作成方法
【課題】ドライバの心理状態に基づく各リンクの運転し易さに基づいて経路を探索する。
【解決手段】観察タイミングにおけるドライバの撮像画像を取得する機能と、ドライバの顔の特徴領域をそれぞれ抽出し、その指標量を算出する機能と、算出された指標量と基準となる基準指標量との相関度に基づいて観察タイミングにおける心理状態レベルを判定する機能と、観察タイミングにおいてドライバが存在する走行リンクを特定する機能と、心理状態のレベルに基づいて走行リンクの難易評価値を算出する機能と、走行リンクの難易評価値に基づいて、地図情報200に含まれるリンクの難易評価値を記憶又は更新する機能と、地図情報200を参照して探索された経路に含まれる各リンクの難易評価値に基づいて走行難易度を算出し、走行難易度が低い推奨経路を探索する機能を実行する制御装置10を備えた経路探索装置100を提供する。
【解決手段】観察タイミングにおけるドライバの撮像画像を取得する機能と、ドライバの顔の特徴領域をそれぞれ抽出し、その指標量を算出する機能と、算出された指標量と基準となる基準指標量との相関度に基づいて観察タイミングにおける心理状態レベルを判定する機能と、観察タイミングにおいてドライバが存在する走行リンクを特定する機能と、心理状態のレベルに基づいて走行リンクの難易評価値を算出する機能と、走行リンクの難易評価値に基づいて、地図情報200に含まれるリンクの難易評価値を記憶又は更新する機能と、地図情報200を参照して探索された経路に含まれる各リンクの難易評価値に基づいて走行難易度を算出し、走行難易度が低い推奨経路を探索する機能を実行する制御装置10を備えた経路探索装置100を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ドライバが運転しやすい経路を探索する経路探索装置及びドライバが運転しやすい経路に関係する情報を作成する経路情報作成方法に関するものである。
【背景技術】
【0002】
出発地から目的地に至る候補経路の道路区間に付加された蛇行度合を読み出し、複数の候補経路の蛇行度合が所定値以下の道路区間からなる候補経路を推奨経路として提示するナビゲーション装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−121374号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、運転がしやすい又は運転がしにくいという認識はドライバごとに異なるものであり、全てのドライバが蛇行度合の大きい経路が運転しにくいと感じるとは限らないため、経路の蛇行度合に基づいて各ドライバの運転のしやすさを正確に判断することが難しいという問題がある。
【0005】
本発明が解決しようとする課題は、過去の経路走行時におけるドライバ自身の心理状態に基づき、そのドライバの観点において運転しやすい経路を探索する経路探索装置及び経路情報作成方法を提供することである。
【課題を解決するための手段】
【0006】
本発明は、観察タイミングにおいて撮像されたドライバの顔の特徴領域の指標量に基づいてドライバの心理状態のレベルを判定し、この判定結果に基づいて走行リンクの難易評価値を算出し、経路探索に用いられる地図情報に含まれるリンクの難易評価値を記憶又は更新することにより、上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、運転中のドライバの表情から求めた心理状態レベルに基づくリンクの難易評価値を地図情報上に記憶するので、ドライバ自身が過去の運転において実際に感じた運転のし易さ又は運転のし難さが反映された経路の情報を得ることができる。この経路情報を含む地図情報を用いることにより、各ドライバの観点において運転がしやすく、走行が容易であると感じる経路を探索することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態を適用したナビゲーション装置の概略構成を示すブロック図である。
【図2】本発明の実施形態の心理状態判定処理の内容を説明するための図である。
【図3】本発明の実施形態の心理状態判定処理に用いられる特徴領域を説明するための図である。
【図4】心理状態レベルの定義の一例を示す図である。
【図5】本発明の実施形態における各経路の走行難易度の算出処理の一例を説明するための図である。
【図6】本発明の実施形態に係る経路探索装置の地図情報の更新処理の制御手順を示すフローチャート図である。
【図7】本発明の実施形態に係る経路探索装置の推奨経路の探索処理の制御手順を示すフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。本実施形態では、本発明に係る経路探索装置を、車両の走行をサポートし、経路案内情報を提供するナビゲーション装置1000に適用した場合を例にして説明する。
【0010】
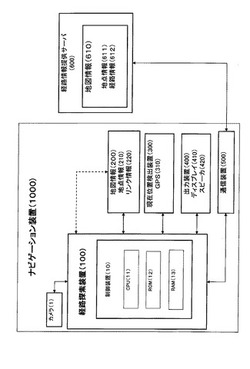
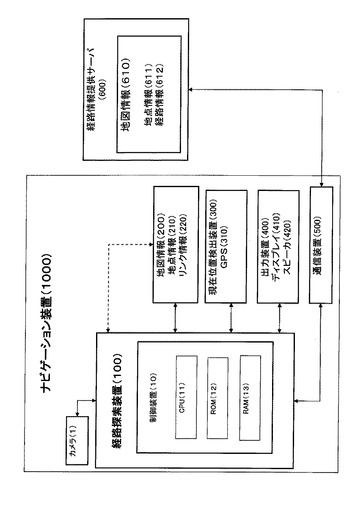
図1は、本実施形態に係る経路探索装置100を含むナビゲーション装置1000のブロック構成図である。図1に示すように、本実施形態のナビゲーション装置1000は、車両に設置されたカメラ1と、経路探索装置100と、地点情報210及びリンク情報220を含み、読み込み及び書き込みが可能な地図情報200と、GPS(Global Positioning System)310等の地点検出装置を備えた現在位置検出装置300と、ディスプレイ410及びスピーカ420を含む出力装置400と、外部との通信が可能な通信装置500とを備えることができる。これらの各装置はCAN(Controller Area Network)その他の車載LANによって接続され、相互に情報の授受を行うことができる。また、本実施形態のナビゲーション装置1000は、外部の地図情報提供サーバ(コンピュータ)600と通信により情報の授受が可能な構成とすることができる。この場合において、ナビゲーション装置1000は、地図情報提供サーバ600が備える地図情報を用いて経路の探索を行うことができる。
【0011】
カメラ1は、CCD(Charge Coupled Devices)等の撮像素子を用いて構成され、ドライバ(ドライバ)の顔を撮像するため、ドライバの頭部領域を撮像可能な位置に設置されている。カメラ1は、所定の観察タイミングにおいてドライバの顔を含む頭部領域を撮像し、撮像した撮像画像を撮像タイミングの情報を付して経路探索装置100に送出する。観察タイミングは任意に設定することができ、所定周期で発生するタイミングとしてもよいし、所定時間内に設定された複数のタイミングとしてもよい。本実施形態では、所定の時間長(数分以上)の観察時間を設け、この観察時間内に複数回の観察タイミング(撮像タイミング)を設定する。カメラ1は、撮像した撮像画像を撮像タイミング(観察タイミング)の情報を付して経路探索装置100に送出する。
【0012】
図1に示すように、本実施形態に係る経路探索装置100の制御装置10は、地図情報200を更新し、推奨経路を探索するプログラムが格納されたROM(Read Only Memory)12と、このROM12に格納されたプログラムを実行することで、経路探索装置100として機能する動作回路としてのCPU(Central Processing Unit)11と、アクセス可能な記憶装置として機能するRAM(Random Access Memory)13と、を備えている。
【0013】
本実施形態に係る経路探索装置100の制御装置10は、画像取得機能と、指標量算出機能と、相関度算出機能と、判定機能と、評価値算出機能と、更新機能と、経路探索機能とを実現するためのソフトウェアと、上述したハードウェアの協働により各機能を実行することができる。
【0014】
以下、本発明の本実施形態に係る経路探索装置100が実現する各機能について説明する。
【0015】
まず、本実施形態に係る経路探索装置100の画像取得機能について説明する。本実施形態の経路探索装置100の制御装置10は、カメラ1が観察タイミングとして設定された所定時間長の観察時間内に撮像した、複数の撮像画像を取得する。各撮像画像には撮像時刻情報が付されており、所定の観察時間内に撮像された撮像画像ごとにグループ化されている。経路探索装置100は、所定周期で到来する観察タイミングにおいて撮像された撮像画像を逐次取得することもできる。
【0016】
特に限定されないが、観察タイミングとして設定される観察時間は、数秒から数分、又は数分から数時間の任意の長さとすることができ、観察時間内における撮像回数も任意に設定することができる。本実施形態では、観察時間を3分〜30分程度に設定する。シャッタースピードに応じた一瞬の時間ではなく、比較的長い数分から数時間の観察時間に渡ってドライバの顔の表情を観察することにより、比較的長い時間に渡ってドライバの心理状態を支配するドライバの気分を判定することができる。
【0017】
次に、本実施形態に係る経路探索装置100の指標量算出機能について図2及び図3に基づいて説明する。なお、本実施形態の制御装置10は、撮像画像のデータを解析し、撮像画像のデータから処理対象に対応する画像を抽出し、抽出された画像に基づいて処理対象の評価をすることができる画像処理コントロールユニット(Image Processing Control Unit: IPCU)を備え、本実施形態の処理に必要な画像処理を行うことができる。
【0018】
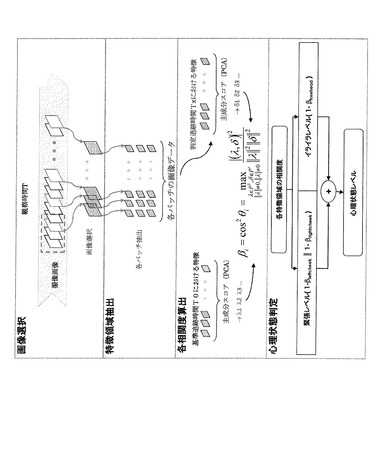
図2に示すように、推定量の算出を行うにあたり、本実施形態に係る経路探索装置100の制御装置10は、取得された複数の撮像画像について、ドライバの顔が正面方向を向いているか否か及びドライバの顔が隠されているか否かを判断し、ドライバの顔が正面方向を向いており、ドライバの顔が隠されていないと判断された撮像画像を選択する。撮像画像に隠れ部分があるか否かは、処理対象となる顔の外形線の態様、顔の基準形状、顔の面積等に基づいて判断することができる。また、顔が正面を向いているか否かは、撮像画像から抽出された顔画像の三次元座標の座標軸(図3のXYZ座標を参照)の方向に基づいて判断することができる。選択された隠れ部分が無く、正面を向いた撮像画像は次に説明する特徴領域の抽出処理に用いられる。
【0019】
本実施形態に係る経路探索装置100は、図2に示すように、取得した各撮像画像からドライバの顔の特徴領域に対応するパッチをそれぞれ抽出する。
【0020】
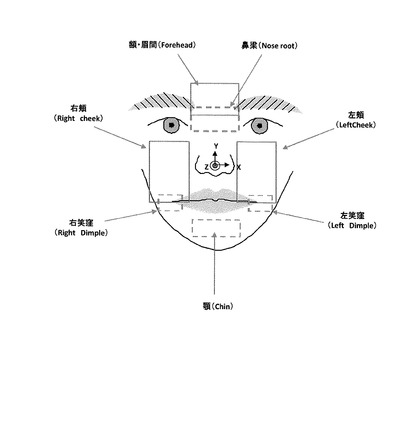
図3はドライバの顔の特徴領域の一例を示す。図3は、ドライバの顔が図面の紙面と垂直方向(Z軸方向)に向いている、すなわちドライバの顔が正面を向いている図である。本実施形態の経路探索装置100では、左右の眉の間の額領域(又は眉間領域)、眉間から鼻先までの部分であり、鼻筋に相当する鼻梁領域、左右の目の下であり鼻の左右の右頬領域及び左頬領域、口の左右の窪みであり、笑ったときに凹みが深くなる右笑窪領域及び左笑窪領域、口の下にある顎領域を、特徴領域として定義する。
【0021】
本実施形態の経路探索装置100においては、ドライバの顔の眉間又は頬領域のうち、何れか一つ以上の特徴領域を撮像画像から抽出する。気分の判定処理において、抽出する特徴領域は、上述の各領域の全部であってもよいし、一部であってもよい。
【0022】
特に限定されないが、本実施形態の経路探索装置100は、正面を向いた顔を撮像した撮像画像から、左右の目、鼻、口の位置を抽出し、目、鼻、口の配置及び位置関係に基づいて上述の各特徴領域に対応する各パッチの画像データを抽出する。抽出した各特徴領域は、特徴領域ごとに識別され、次の相関度の算出処理に用いられる。なお、特徴領域の抽出手法は限定されず、出願時に知られた手法を適宜に用いることができる。
【0023】
そして、本実施形態の経路探索装置100は、抽出された観察時間(観察タイミング)における各特徴領域の指標量をそれぞれ算出する。図2に示すように、本実施形態の経路探索装置100は、特徴領域に対応する各パッチの画像データを取得し、特徴領域ごとの観察時間Tにおける指標量をそれぞれ算出する。本実施形態において算出される指標量の内容は、特徴領域に表わされた特徴量を示すものであれば特に限定されず、その算出手法も限定されない。本実施形態では、ある主成分に関する総合的な指標を統計的に設定し,変数間の関係を把握するための主成分分析(PCA: Principal Component Analysis)を用いて主成分スコア(指標量)を求める。特徴領域ごとの観察時間Tにおける指標量は、出願時に知られた分析手法、統計手法などを適宜に用いることができる。
【0024】
次に、本実施形態に係る経路探索装置100の相関度算出機能について説明する。本実施形態の経路探索装置100の制御装置10は、今回相関度の算出が行われる観察タイミング(観察時間T)に撮像された撮像画像を用いて、先に説明した手法により算出された特徴領域ごとの観察時間Tにおける主成分スコア(指標量)を得るとともに、ドライバが平常状態である基準観察時間T0において予め算出された各特徴領域の基準指標量をRAM13から読みだす。この基準指標量は、予め算出しておきRAM13に記憶しておくことができる。
【0025】
そして、本実施形態の経路探索装置100は、観察時間Tにおける指標量(主成分スコア)に対応する観察ベクトルと、基準指標量(基準となる主成分スコア)に対応する固有ベクトルとの相関度βiを下掲の数1の式により算出することができる。なお、相関度の算出手法は特に限定されず、他の相関度の算出手法を用いることができる。
【数1】

【0026】
続いて、本実施形態に係る経路探索装置100の判定機能について説明する。本実施形態の経路探索装置100の制御装置10は、算出された相関度に基づいてドライバの気分の度合いを判定する。
【0027】
本実施形態の経路探索装置100は、図2に示すように、各特徴領域の相関度について、緊張レベルに応じた相関度と、イライラレベルに応じた相関度を求め、これらの各相関度を加えて総合的な相関度を算出し、総合的な相関度に基づいて観察時間Tにおける心理状態レベル(気分レベル)を判断する。特に限定されないが、本実施形態において、経路探索装置100は、緊張レベルに応じた相関度を顔の頬領域(特徴領域)の指標量に基づいて算出し、イライラレベルに応じた相関度を顔の眉間領域(特徴領域)の指標量に基づいて算出することができる。
【0028】
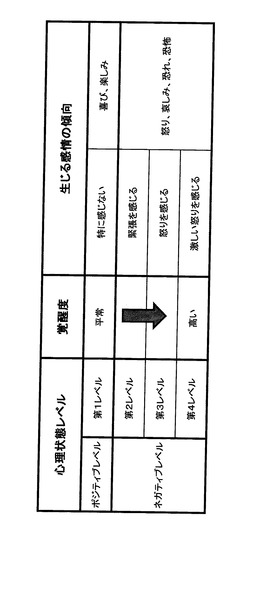
特に限定されないが、本実施形態の経路探索装置100は、ドライバの気分の度合いを、喜び、楽しみといった積極的な心理であるポジティブレベルと、怒り、哀しみ、恐れ、恐怖といった消極的な心理であるネガティブレベルとの2つの区分に分けることができる。また、本実施形態の経路探索装置100は、ドライバの気分の度合いを、第1〜第4の四つのレベルに区分して判定することができる。これらの気分の度合いの定義例を図4に示す。図4に示すように、本実施形態では、心理状態野カテゴリに応じて2つのレベルに分ける手法と、覚醒度の高さに応じて気分を4つのレベルに分ける手法を提案するが、心理状態レベルの態様はこれらに限定されるものではない。なお、所定長さの観察時間において継続して示される心理状態(気分)のレベルはドライバ自身が自覚できない場合があるので、各気分のレベルをドライバ自身が自覚することができる感情の種別を用いて表現すると、本実施形態の心理状態(気分)のレベルは、平常な状態である第1レベル、緊張を感じやすい傾向にある第2レベル、怒りを感じやすい傾向にある第3レベル、及び激しい怒りを感じやすい傾向にある第4レベルと表現することができる。
【0029】
本実施形態に係る経路探索装置100は、算出された相関度に基づいて判定された気分の度合いと観察時間Tとを対応づけて少なくとも一時的に記憶する。
【0030】
次に、本実施形態に係る経路探索装置100の評価値算出機能について説明する。本実施形態に係る経路探索装置100は、観察タイミングにおけるドライバの心理状態のレベルに基づいて、観察タイミングにおいてドライバが存在する観察位置を含む走行リンクの運転し易さを示す難易評価値(Weight)を算出する。
【0031】
本実施形態に係る経路探索装置100は、リンクを定義する二つのノードのうち終端を通過したときにリンクごとの難易評価値を算出する。もちろん、目的地に到達し、一つのトリップが完了したときに出発地から目的地に至るまでに走行した全リンクの難易評価値を算出してもよい。
【0032】
本実施形態に係る経路探索装置100は、観察タイミング(観察時間)におけるドライバの心理状態レベルを数値化するため、心理状態レベルごとに与える評価値Lを定義している。本実施形態の心理状態レベルと評価値Lとは、以下に示す数1の関係を有する。つまり、心理状態が平常に近い第1レベル(L1)ほど評価値は大きな値となり、覚醒度の高い心理状態に近い第4レベル(L4)ほど評価値は小さい値となる。
【数2】
【0033】
特に限定されないが、本実施形態では、表1に示すように、心理状態をレベル1が属するポジティブレベルには正の評価値Lが与えられ、レベル2〜4が属するネガティブレベルには負の評価値が与えることができる。この評価値の設定は任意に定義することができ、ポジティブレベルに負の評価値Lを与え、ネガティブレベルに正の評価値を与えてもよい。
【表1】
【0034】
本実施形態に係る経路探索装置100は、各リンクの開始点の通過時から終端点を通過するまでの間に設定された観察タイミングにおいて判定された心理状態レベルに基づいて、その走行リンクの難易評価値(Weight)を求める。求められた難易評価値(Weight)は走行リンクと対応づけて地図情報200に少なくとも一時的に記憶される。ちなみに、難易評価値(Weight)の観察タイミング(観察時間)は識別可能であるので、観察タイミングにおける観察位置を含む走行リンクが特定すれば、難易評価値(Weight)と走行リンクとを対応づけることができる。なお、地図情報200は、リンクの長さ、リンクを定義するノードの位置情報、リンクに含まれる地点情報、リンクの運転し易さを示す難易評価値を含むリンク情報220を読み込み可能な状態で備えている。
【0035】
また、本実施形態の経路探索装置100は、出発地から目的地に至る一つのトリップが終わる度に、各リンクの難易評価値(Weight)を補正するための更新値(Weight link renew)を算出することができる。本実施形態では、現在、地図情報200に記憶されている判断対象となる走行リンクの難易評価値:Weight link current)と、今回の処理において算出された走行リンクの難易評価値とに基づく補正値とに基づいて、新たに地図情報200に記録されるべき難易評価値の更新値(Weight link renew)を算出することができる。
【0036】
特に限定されないが、本実施形態における補正値は、処理対象となる走行リンクの走行時に判定された心理状態のレベルに最も影響を与える心理状態レベルの支配値(mood_level(link current)と、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の中央値、最頻値、平均値その他の代表値に基づく補正因子とを用いて求めることができる。
【0037】
本実施形態における心理状態レベルの支配値(mood_level(link current)は、ある走行リンクの走行時に判定された心理状態レベルのうち、判定回数が最も多い心理状態レベルや、ある走行リンクの走行時に判定された心理状態レベルのうち、各心理状態レベルで走行した距離や時間が最も長い心理状態レベルとすることができる。たとえば、所定周期で心理状態レベルを判定した場合において、10kmのリンクのうち、7kmのリンクで同じレベル3の心理状態であると判定されたときは、支配値が評価値Lの「−0.2」又はこれに応じた値とすることができる。また、走行リンクの通過時間において、100個の判定結果のうち70個の判定結果がレベル3の心理状態であるときも、支配値が評価値Lの「−0.2」又はこれに応じた値とすることができる。
【0038】
難易評価値の更新値(Weight link renew)を求める式の一例を下式(数3)に示す。
【数3】
【0039】
数3に示すように、本実施形態では、前回までの処理において算出され、地図情報200に記憶されている現在の難易評価値(Weight link current)に、心理状態レベルの支配値(mood_level(link current)を、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の平均値である補正因子で除した補正因子を加えて、難易評価値の更新値(Weight link renew)を算出する。
【0040】
続いて、本実施形態に係る経路探索装置100の更新機能について説明する。本実施形態に係る経路探索装置100は、算出された走行リンクの難易評価値に基づいて、地図情報200に含まれる走行リンクに対応するリンクの難易評価値を記憶又は更新する。
【0041】
経路探索装置100は、出発地から目的地までの一つのトリップが終わる度に、走行したリンクに対応づけて地図情報200に記憶されている難易評価値に代えて、今回の難易評価値に基づいて算出された各リンクの難易評価値の更新値を記憶する。
【0042】
最後に、本実施形態に係る経路探索装置100の経路探索機能について説明する。本実施形態の経路探索装置100は、地図情報200を参照して探索された出発地から目的地に至る経路について、各経路に含まれる各リンクの難易評価値(更新されている場合は更新後の難易評価値)に基づいて各経路の走行難易度を算出し、この走行難易度に基づく推奨経路を探索する。
【0043】
特に限定されないが、本実施形態の経路探索装置100は、各リンクの難易評価値(更新後の難易評価値)にリンクの距離を乗じ、これをリンクの難易評価値(Weight)とする。そして、経路探索装置100は、出発地から目的地に至る経路に含まれる各リンクの難易評価値(Weight)を合計して、各経路の走行難易度を算出する。
【0044】
そして、本実施形態の経路探索装置100は、各経路の走行難易度を比較し、走行難易度が最も低い経路を推奨経路として探索することができる。もちろん、走行難易度とともに、経路の長さ、通行料金、通過所要時間などの経路選択の他の要因を考慮して、推奨経路を決定することができる。
【0045】
本実施形態では、下式(数4)に示すように、走行難易度の最も低い(難易評価値の値が最も高い)経路を選択する。
【数4】
【0046】
このように、走行難易度に基づく経路を推奨経路とすることができるので、ドライバ自身が実際に感じた走行し易さが反映された経路を探索することができる。
【0047】
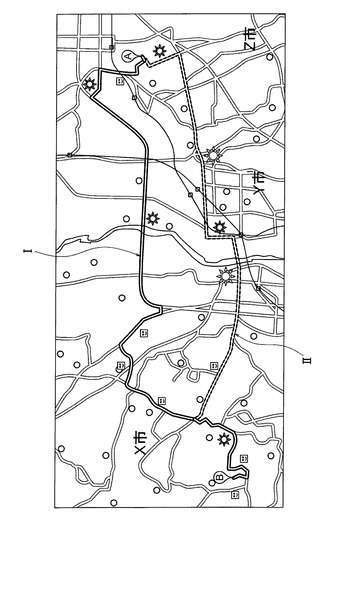
以下に、各経路の走行難易度の具体的な算出例を、図5に示す地点及び経路を例にして説明する。本例では、図5の地点Aから地点Bまでの経路を考慮する。地点Aから地点Bに至る経路を一般的な手法により探索すると、経路Iと経路IIとが探索される。
【0048】
経路I及びIIの心理状態レベル、リンクの長さ、リンクの難易評価値、及びこれらに基づく経路の走行難易度を表2に示す。なお、リンクの難易評価値を求める評価値は表1に示すものを用いた。
【表2】
【0049】
表2に示すように、本例の経路Iに対するドライバの走行難易度は−0.3であり(走行難易度Path1= L1*2 + L2*1 + L2*10 + L1*2 + L1*2 + L1*3+ (L2*3 + L1*1 + L1*1) = - 0.3)、他方、経路IIに対するドライバの走行難易度は−2.3(走行難易度Path2 = L2*1 + L3*7 + L2*1 + L3*3 + L1*4.5 + (L2*3 + L1*1 + L1*1) = - 2.3)である。上記数4に従えば、値が最大となる経路Iが最も走行難易度が低い推奨経路となる。探索された推奨経路はドライバ自身の表情から判定された心理状態に基づくものであるので、各ドライバの走り易い経路を高い精度で探索することができる。
【0050】
また、図5に示す地図において、心理状態レベルが1のリンクには、矩形枠の中に笑顔が示されたマーク1を付し、心理状態レベルが2のリンクには、小さい太陽のマーク2を付し、心理状態レベルが3のリンクには大きい太陽のマーク3を付して、ドライバの心理状態と経路との対応関係を視認可能なように示している。心理状態レベルの大小を示すマークにより、どのルートがドライバ自身にとって走り易いかを目視で確認することができる。
【0051】
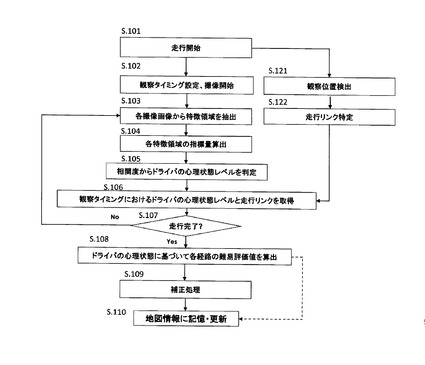
続いて、本実施形態の経路探索装置100の制御手順を、図6、図7に示すフローチャートに基づいて説明する。図6は地図情報の更新処理の制御手順を示し、図7は推奨経路の探索処理の制御手順を示すフローチャート図である。
【0052】
図6に示すように、ステップ101において、本実施形態の経路探索装置100は、走行開始をトリガとして難易評価値の算出及び記憶処理を開始する。
【0053】
ステップ102において、本実施形態の経路探索装置100は、観察タイミングとして観察時間Tを設定し、カメラ1によるドライバの頭部近傍の撮像を開始する。観察時間Tは数分から数時間の所定の長さで予め設定しておくことができる。
【0054】
次に、ステップ103において、本実施形態の経路探索装置100は、撮像画像から顔に対応する画像を検出し、目、鼻、口などの顔の特徴部分を追跡し、各特徴部分の位置に応じて、図3に示す各特徴領域を抽出する。特に限定されないが、本処理においては、覚醒度の影響が現れやすい眉間領域の画像と左右の頬領域の画像とを特徴領域として抽出する。
【0055】
特に限定されないが、経路探索装置100は、特徴領域の抽出処理を行う撮像画像として、顔に対応する画像に手などによって隠された部分(欠け)が無く、かつドライバの顔の向き(図3に示すZ軸方向からのずれ量)が正面を向いているものを、選択することができる。なお、観察時間Tの間に選択された撮像画像の数が所定数未満である場合には、正確な判定ができないとして気分判定処理を中止するようにすることもできる。
【0056】
ステップ104において、本実施形態の経路探索装置100は、主成分分析(PCA)の手法を用いて、各特徴領域の指標量(主成分スコア)をそれぞれ算出する。
【0057】
ステップ105において、本実施形態の経路探索装置100は、ステップ104において算出された観察時間Tにおける指標量と、基準となる基準観察時間T0における指標量との相関度を算出し、算出された相関度に基づいて、観察時間Tにおけるドライバの気分が図4に示す四つの気分レベルのうち、いずれのレベルに属するのかを判定する。
【0058】
上述のステップ102からステップ105の処理と並行して行われるステップ121において、経路探索装置100は現在位置検出装置200を用いて観察タイミングにおいて自車両が存在する観察位置を検出する。そして、ステップ122において、経路探索装置100は地図情報200を参照して、観察位置が含まれる走行リンクを特定する。
【0059】
続く、ステップ106において、経路探索装置100は、ステップ105において判定された観察タイミングにおけるユーザの心理状態レベルと、ステップ122において特定された走行リンクとを取得する。
【0060】
ステップ107において、経路探索装置100は、難易評価値を算出するトリガとして、車両が目的地に到着して走行が完了したか否かを判断する。難易評価値を算出するトリガは、目的地への到着に限定されず、任意の設定時刻、イグニッションキーオフ信号が入力されたとき、任意の設定時刻以後にイグニッションキー信号が入力されたときなどとすることができる。
【0061】
経路探索装置100は、走行が完了するまでステップ103以降の難易評価値の算出処理を継続する。算出された難易評価値は、少なくとも一時的に記憶しておくことができる。
【0062】
ステップ107において走行完了と判断された場合には、ステップ108へ進み、経路探索装置100は、ドライバの心理状態に基づいて各経路の難易評価値を算出する。
【0063】
また、ステップ109において、経路探索装置100は、今回記憶又は更新する難易評価値の更新値を求める際に、補正処理を行うことができる。本実施形態の経路探索装置100は、走行リンクの走行時に判定された心理状態のレベルに最も影響を与える心理状態レベルの支配値を、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の代表値に基づく補正因子で除して走行リンクの難易評価値の更新値を算出する。
【0064】
ステップ110において、経路探索装置100は、算出された経路探索装置100を地図情報200に記憶・更新する。
【0065】
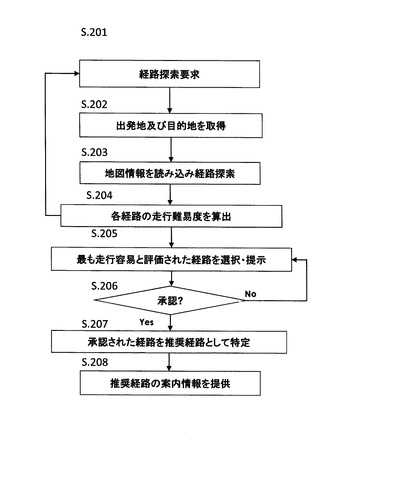
次に、図7に基づいて、推奨経路の探索処理について説明する。ステップ201において、本実施形態の経路探索装置100は、経路探索要求が入力されると、推奨経路の探索処理を開始する。
【0066】
続いて、ステップ202において、本実施形態の経路探索装置100は、経路探索要求に伴って入力された目的地と、現在位置検出装置300から取得した出発地を取得する。
【0067】
ステップ203において、経路探索装置100は、地図情報300を読み込み、出発地から目的地までの経路を探索する。探索経路は複数であってもよい。
【0068】
ステップ204において、経路探索装置100は、探索された各経路に含まれる各リンクの難易評価値に基づいて各経路の走行難易度を算出する。
【0069】
次に、ステップ205において、経路探索装置100は、各経路の走行難易度を比較し、最も走行容易と評価する経路を推奨経路として選択し、ディスプレイ410に提示する。なお、走行難易度に加えて走行距離、料金、渋滞の程度を考慮する場合には、これらに重みづけをして総合的に評価することができる。
【0070】
ステップ206において、提示した推奨経路がドライバに承認された場合には、ステップ207へ進み、承認された経路を推奨経路として特定する。他方、承認されなかった場合には次に走行容易と評価される経路を選択し提示する。
【0071】
最後に、ステップ208において、特定された推奨経路の案内情報の提供を開始する。案内情報の提供手法は、一般的なナビゲーション装置において用いられる手法と共通する。
【0072】
なお、本実施形態では、難易評価値を含む経路情報の作成処理を行う経路探索装置100が車両に搭載された場合を例にして説明したが、本発明の本実施形態に係る経路情報の作成方法を、経路探索処理を行うクライアントコンピュータ(ナビゲーション装置、携帯電話などのコンピュータ)と情報の授受が可能な経路情報提供サーバ600(コンピュータ・制御装置)において実行することもできる。経路情報提供サーバは、クライアントと離隔した場所に配置され、クライアントコンピュータの要求に応じて、難易度評価値、走行難易度に関する情報を含む経路情報を提供することができる。
【0073】
クライアントコンピュータと情報の授受が可能な経路情報提供サーバ600は、以下の処理により経路情報の作成方法を実行することができる。具体的に、経路情報提供サーバ600は、観察タイミングにおいて撮像された、車両(移動体)を運転するドライバの頭部領域の撮像画像から、ドライバの顔の特徴領域をそれぞれ抽出してこの各特徴領域の指標量を算出するステップと、各特徴領域の指標量と、基準とする基準観察タイミングにおいて予め算出された各特徴領域の基準指標量との相関度に基づいて、観察タイミングにおけるドライバの心理状態のレベルを判定するステップと、観察タイミングにおけるドライバの心理状態のレベルに基づいて、ドライバが存在する観察位置を含む走行リンクの運転し易さを示す難易評価値を算出するステップと、算出された走行リンクの難易評価値を、経路情報672に含まれる走行リンクに応じたリンクに対応づけて記憶するステップとを実行することにより、経路情報612を作成する。
【0074】
特に限定されないが、経路情報612に含まれる難易評価値はユーザの識別情報ごとに整理することができる。これにより、ユーザごとの運転し易さを個別に反映させた経路情報を作成することができる。
【0075】
他方、複数のユーザから収集した難易評価値は統計的な処理を行って、一つの経路情報612として作成することができる。これにより、複数のユーザが実際に感じた運転のし易さの統計的傾向が反映された経路情報を作成することができる。
【0076】
本実施形態における経路情報提供サーバ600とナビゲーション装置1000(クライアントサーバ)とは、経路探索システムを構成することができる。クライアントコンピュータは、経路情報提供サーバ600の地図情報610にアクセスし、この地図情報610を参照して出発地から目的地に至る経路を探索するとともに、各経路に含まれる各リンクの難易評価値に基づく各経路の走行難易度に基づく推奨経路を探索することができる。処理の具体的な内容は、本実施形態の経路探索装置100、ナビゲーション装置1000と共通するのでこれらの説明を援用する。
【0077】
本発明の本実施形態の経路探索装置100は以上のように構成され、以上のように動作するので、以下の効果を奏する。
【0078】
本発明の本実施形態に係る経路探索装置100によれば、運転中のドライバの表情から求めた心理状態レベルに基づくリンクの難易評価値を地図情報200、610に記憶するので、ドライバ自身が過去の運転で実際に感じた運転のし易さ又は運転のし難さが反映された地図情報200、経路情報612を得ることができ、これらの情報を用いることにより各ドライバが運転しやすいと実感できる経路を探索することができる。
【0079】
本発明の本実施形態に係る経路探索装置100によれば、走行リンクの走行時に判定された心理状態のレベルに最も影響を与える心理状態レベルの支配値を用いて走行リンクの難易評価値の更新値を算出するので、走行時のドライバの実際の運転し易さ又は運転し難さを反映させて難易評価値を更新することができる。
【0080】
本発明の本実施形態に係る経路探索装置100によれば、走行全体におけるドライバの心理状態が反映された補正因子で、更新に用いられる支配値を除するので、あるリンクにおいて特徴的に観察されたドライバの心理状態が難易評価値に与える影響を緩和することができる。これにより、長い時間で観察したときに見られるドライバの心理状態を考慮して、各リンクの難易評価値を補正することができる。たとえば、長い時間で観察したときのドライバの心理状態は平常であるときに、一つの走行リンクにおいてドライバの一時的な表情によって心理状態がレベル4(激怒)と判定され、支配値が偏った値(小さい値)となった場合であっても、ドライバの基本的な心理状態(平常)に近づくように補正することができる。この結果、実際のドライバの心理状態を正確に難易評価値に反映させることができ、ドライバが実際に感じた走行し易さに合致した経路を探索することができる。
【0081】
本発明に係る実施形態の気分判定方法によれば、ドライバが実際に感じた難易評価値をリンクに対応づけた経路情報を作成できるので、上述の経路探索装置100と同様の作用を奏し、同様の効果を得ることができる。
【0082】
なお、以上説明したすべての実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【0083】
本明細書では、本発明に係る経路探索装置の一態様として経路探索装置100及びナビゲーション装置1000を例にして説明するが、本発明はこれに限定されるものではない。
【0084】
また、本明細書では、本発明に係る経路探索装置の一態様として、CPU11、ROM12、RAM13を含む制御装置10を備える経路探索装置100を一例として説明するが、これに限定されるものではない。
【0085】
また、本明細書では、画像取得手段と、指標量算出手段と、相関度算出手段と、判定手段と、評価値算出手段と、更新手段と、経路探索手段とを有する本発明に係る経路探索装置の一態様として、経路探索装置100を説明するが、これに限定されるものではない。
【0086】
本明細書では、本発明に係る経路探索装置の一態様として、本願発明に係る経路探索装置100と、地図情報200と、現在位置検出装置300と、出力装置400と、通信装置500とを備えたナビゲーション装置1000を例にして説明するが、本発明はこれに限定されるものではない。また、ナビゲーション装置1000と経路探索サーバ600とにより、経路探索システムを構成することができる。
【符号の説明】
【0087】
1000…ナビゲーション装置
100…経路探索装置
10…制御装置
11…CPU
12…ROM
13…RAM
1…カメラ
200…地図情報
300…現在位置検出装置
400…出力装置
500…通信装置
600…地図情報提供サーバ
【技術分野】
【0001】
本発明は、ドライバが運転しやすい経路を探索する経路探索装置及びドライバが運転しやすい経路に関係する情報を作成する経路情報作成方法に関するものである。
【背景技術】
【0002】
出発地から目的地に至る候補経路の道路区間に付加された蛇行度合を読み出し、複数の候補経路の蛇行度合が所定値以下の道路区間からなる候補経路を推奨経路として提示するナビゲーション装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−121374号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、運転がしやすい又は運転がしにくいという認識はドライバごとに異なるものであり、全てのドライバが蛇行度合の大きい経路が運転しにくいと感じるとは限らないため、経路の蛇行度合に基づいて各ドライバの運転のしやすさを正確に判断することが難しいという問題がある。
【0005】
本発明が解決しようとする課題は、過去の経路走行時におけるドライバ自身の心理状態に基づき、そのドライバの観点において運転しやすい経路を探索する経路探索装置及び経路情報作成方法を提供することである。
【課題を解決するための手段】
【0006】
本発明は、観察タイミングにおいて撮像されたドライバの顔の特徴領域の指標量に基づいてドライバの心理状態のレベルを判定し、この判定結果に基づいて走行リンクの難易評価値を算出し、経路探索に用いられる地図情報に含まれるリンクの難易評価値を記憶又は更新することにより、上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、運転中のドライバの表情から求めた心理状態レベルに基づくリンクの難易評価値を地図情報上に記憶するので、ドライバ自身が過去の運転において実際に感じた運転のし易さ又は運転のし難さが反映された経路の情報を得ることができる。この経路情報を含む地図情報を用いることにより、各ドライバの観点において運転がしやすく、走行が容易であると感じる経路を探索することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態を適用したナビゲーション装置の概略構成を示すブロック図である。
【図2】本発明の実施形態の心理状態判定処理の内容を説明するための図である。
【図3】本発明の実施形態の心理状態判定処理に用いられる特徴領域を説明するための図である。
【図4】心理状態レベルの定義の一例を示す図である。
【図5】本発明の実施形態における各経路の走行難易度の算出処理の一例を説明するための図である。
【図6】本発明の実施形態に係る経路探索装置の地図情報の更新処理の制御手順を示すフローチャート図である。
【図7】本発明の実施形態に係る経路探索装置の推奨経路の探索処理の制御手順を示すフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。本実施形態では、本発明に係る経路探索装置を、車両の走行をサポートし、経路案内情報を提供するナビゲーション装置1000に適用した場合を例にして説明する。
【0010】
図1は、本実施形態に係る経路探索装置100を含むナビゲーション装置1000のブロック構成図である。図1に示すように、本実施形態のナビゲーション装置1000は、車両に設置されたカメラ1と、経路探索装置100と、地点情報210及びリンク情報220を含み、読み込み及び書き込みが可能な地図情報200と、GPS(Global Positioning System)310等の地点検出装置を備えた現在位置検出装置300と、ディスプレイ410及びスピーカ420を含む出力装置400と、外部との通信が可能な通信装置500とを備えることができる。これらの各装置はCAN(Controller Area Network)その他の車載LANによって接続され、相互に情報の授受を行うことができる。また、本実施形態のナビゲーション装置1000は、外部の地図情報提供サーバ(コンピュータ)600と通信により情報の授受が可能な構成とすることができる。この場合において、ナビゲーション装置1000は、地図情報提供サーバ600が備える地図情報を用いて経路の探索を行うことができる。
【0011】
カメラ1は、CCD(Charge Coupled Devices)等の撮像素子を用いて構成され、ドライバ(ドライバ)の顔を撮像するため、ドライバの頭部領域を撮像可能な位置に設置されている。カメラ1は、所定の観察タイミングにおいてドライバの顔を含む頭部領域を撮像し、撮像した撮像画像を撮像タイミングの情報を付して経路探索装置100に送出する。観察タイミングは任意に設定することができ、所定周期で発生するタイミングとしてもよいし、所定時間内に設定された複数のタイミングとしてもよい。本実施形態では、所定の時間長(数分以上)の観察時間を設け、この観察時間内に複数回の観察タイミング(撮像タイミング)を設定する。カメラ1は、撮像した撮像画像を撮像タイミング(観察タイミング)の情報を付して経路探索装置100に送出する。
【0012】
図1に示すように、本実施形態に係る経路探索装置100の制御装置10は、地図情報200を更新し、推奨経路を探索するプログラムが格納されたROM(Read Only Memory)12と、このROM12に格納されたプログラムを実行することで、経路探索装置100として機能する動作回路としてのCPU(Central Processing Unit)11と、アクセス可能な記憶装置として機能するRAM(Random Access Memory)13と、を備えている。
【0013】
本実施形態に係る経路探索装置100の制御装置10は、画像取得機能と、指標量算出機能と、相関度算出機能と、判定機能と、評価値算出機能と、更新機能と、経路探索機能とを実現するためのソフトウェアと、上述したハードウェアの協働により各機能を実行することができる。
【0014】
以下、本発明の本実施形態に係る経路探索装置100が実現する各機能について説明する。
【0015】
まず、本実施形態に係る経路探索装置100の画像取得機能について説明する。本実施形態の経路探索装置100の制御装置10は、カメラ1が観察タイミングとして設定された所定時間長の観察時間内に撮像した、複数の撮像画像を取得する。各撮像画像には撮像時刻情報が付されており、所定の観察時間内に撮像された撮像画像ごとにグループ化されている。経路探索装置100は、所定周期で到来する観察タイミングにおいて撮像された撮像画像を逐次取得することもできる。
【0016】
特に限定されないが、観察タイミングとして設定される観察時間は、数秒から数分、又は数分から数時間の任意の長さとすることができ、観察時間内における撮像回数も任意に設定することができる。本実施形態では、観察時間を3分〜30分程度に設定する。シャッタースピードに応じた一瞬の時間ではなく、比較的長い数分から数時間の観察時間に渡ってドライバの顔の表情を観察することにより、比較的長い時間に渡ってドライバの心理状態を支配するドライバの気分を判定することができる。
【0017】
次に、本実施形態に係る経路探索装置100の指標量算出機能について図2及び図3に基づいて説明する。なお、本実施形態の制御装置10は、撮像画像のデータを解析し、撮像画像のデータから処理対象に対応する画像を抽出し、抽出された画像に基づいて処理対象の評価をすることができる画像処理コントロールユニット(Image Processing Control Unit: IPCU)を備え、本実施形態の処理に必要な画像処理を行うことができる。
【0018】
図2に示すように、推定量の算出を行うにあたり、本実施形態に係る経路探索装置100の制御装置10は、取得された複数の撮像画像について、ドライバの顔が正面方向を向いているか否か及びドライバの顔が隠されているか否かを判断し、ドライバの顔が正面方向を向いており、ドライバの顔が隠されていないと判断された撮像画像を選択する。撮像画像に隠れ部分があるか否かは、処理対象となる顔の外形線の態様、顔の基準形状、顔の面積等に基づいて判断することができる。また、顔が正面を向いているか否かは、撮像画像から抽出された顔画像の三次元座標の座標軸(図3のXYZ座標を参照)の方向に基づいて判断することができる。選択された隠れ部分が無く、正面を向いた撮像画像は次に説明する特徴領域の抽出処理に用いられる。
【0019】
本実施形態に係る経路探索装置100は、図2に示すように、取得した各撮像画像からドライバの顔の特徴領域に対応するパッチをそれぞれ抽出する。
【0020】
図3はドライバの顔の特徴領域の一例を示す。図3は、ドライバの顔が図面の紙面と垂直方向(Z軸方向)に向いている、すなわちドライバの顔が正面を向いている図である。本実施形態の経路探索装置100では、左右の眉の間の額領域(又は眉間領域)、眉間から鼻先までの部分であり、鼻筋に相当する鼻梁領域、左右の目の下であり鼻の左右の右頬領域及び左頬領域、口の左右の窪みであり、笑ったときに凹みが深くなる右笑窪領域及び左笑窪領域、口の下にある顎領域を、特徴領域として定義する。
【0021】
本実施形態の経路探索装置100においては、ドライバの顔の眉間又は頬領域のうち、何れか一つ以上の特徴領域を撮像画像から抽出する。気分の判定処理において、抽出する特徴領域は、上述の各領域の全部であってもよいし、一部であってもよい。
【0022】
特に限定されないが、本実施形態の経路探索装置100は、正面を向いた顔を撮像した撮像画像から、左右の目、鼻、口の位置を抽出し、目、鼻、口の配置及び位置関係に基づいて上述の各特徴領域に対応する各パッチの画像データを抽出する。抽出した各特徴領域は、特徴領域ごとに識別され、次の相関度の算出処理に用いられる。なお、特徴領域の抽出手法は限定されず、出願時に知られた手法を適宜に用いることができる。
【0023】
そして、本実施形態の経路探索装置100は、抽出された観察時間(観察タイミング)における各特徴領域の指標量をそれぞれ算出する。図2に示すように、本実施形態の経路探索装置100は、特徴領域に対応する各パッチの画像データを取得し、特徴領域ごとの観察時間Tにおける指標量をそれぞれ算出する。本実施形態において算出される指標量の内容は、特徴領域に表わされた特徴量を示すものであれば特に限定されず、その算出手法も限定されない。本実施形態では、ある主成分に関する総合的な指標を統計的に設定し,変数間の関係を把握するための主成分分析(PCA: Principal Component Analysis)を用いて主成分スコア(指標量)を求める。特徴領域ごとの観察時間Tにおける指標量は、出願時に知られた分析手法、統計手法などを適宜に用いることができる。
【0024】
次に、本実施形態に係る経路探索装置100の相関度算出機能について説明する。本実施形態の経路探索装置100の制御装置10は、今回相関度の算出が行われる観察タイミング(観察時間T)に撮像された撮像画像を用いて、先に説明した手法により算出された特徴領域ごとの観察時間Tにおける主成分スコア(指標量)を得るとともに、ドライバが平常状態である基準観察時間T0において予め算出された各特徴領域の基準指標量をRAM13から読みだす。この基準指標量は、予め算出しておきRAM13に記憶しておくことができる。
【0025】
そして、本実施形態の経路探索装置100は、観察時間Tにおける指標量(主成分スコア)に対応する観察ベクトルと、基準指標量(基準となる主成分スコア)に対応する固有ベクトルとの相関度βiを下掲の数1の式により算出することができる。なお、相関度の算出手法は特に限定されず、他の相関度の算出手法を用いることができる。
【数1】
【0026】
続いて、本実施形態に係る経路探索装置100の判定機能について説明する。本実施形態の経路探索装置100の制御装置10は、算出された相関度に基づいてドライバの気分の度合いを判定する。
【0027】
本実施形態の経路探索装置100は、図2に示すように、各特徴領域の相関度について、緊張レベルに応じた相関度と、イライラレベルに応じた相関度を求め、これらの各相関度を加えて総合的な相関度を算出し、総合的な相関度に基づいて観察時間Tにおける心理状態レベル(気分レベル)を判断する。特に限定されないが、本実施形態において、経路探索装置100は、緊張レベルに応じた相関度を顔の頬領域(特徴領域)の指標量に基づいて算出し、イライラレベルに応じた相関度を顔の眉間領域(特徴領域)の指標量に基づいて算出することができる。
【0028】
特に限定されないが、本実施形態の経路探索装置100は、ドライバの気分の度合いを、喜び、楽しみといった積極的な心理であるポジティブレベルと、怒り、哀しみ、恐れ、恐怖といった消極的な心理であるネガティブレベルとの2つの区分に分けることができる。また、本実施形態の経路探索装置100は、ドライバの気分の度合いを、第1〜第4の四つのレベルに区分して判定することができる。これらの気分の度合いの定義例を図4に示す。図4に示すように、本実施形態では、心理状態野カテゴリに応じて2つのレベルに分ける手法と、覚醒度の高さに応じて気分を4つのレベルに分ける手法を提案するが、心理状態レベルの態様はこれらに限定されるものではない。なお、所定長さの観察時間において継続して示される心理状態(気分)のレベルはドライバ自身が自覚できない場合があるので、各気分のレベルをドライバ自身が自覚することができる感情の種別を用いて表現すると、本実施形態の心理状態(気分)のレベルは、平常な状態である第1レベル、緊張を感じやすい傾向にある第2レベル、怒りを感じやすい傾向にある第3レベル、及び激しい怒りを感じやすい傾向にある第4レベルと表現することができる。
【0029】
本実施形態に係る経路探索装置100は、算出された相関度に基づいて判定された気分の度合いと観察時間Tとを対応づけて少なくとも一時的に記憶する。
【0030】
次に、本実施形態に係る経路探索装置100の評価値算出機能について説明する。本実施形態に係る経路探索装置100は、観察タイミングにおけるドライバの心理状態のレベルに基づいて、観察タイミングにおいてドライバが存在する観察位置を含む走行リンクの運転し易さを示す難易評価値(Weight)を算出する。
【0031】
本実施形態に係る経路探索装置100は、リンクを定義する二つのノードのうち終端を通過したときにリンクごとの難易評価値を算出する。もちろん、目的地に到達し、一つのトリップが完了したときに出発地から目的地に至るまでに走行した全リンクの難易評価値を算出してもよい。
【0032】
本実施形態に係る経路探索装置100は、観察タイミング(観察時間)におけるドライバの心理状態レベルを数値化するため、心理状態レベルごとに与える評価値Lを定義している。本実施形態の心理状態レベルと評価値Lとは、以下に示す数1の関係を有する。つまり、心理状態が平常に近い第1レベル(L1)ほど評価値は大きな値となり、覚醒度の高い心理状態に近い第4レベル(L4)ほど評価値は小さい値となる。
【数2】
【0033】
特に限定されないが、本実施形態では、表1に示すように、心理状態をレベル1が属するポジティブレベルには正の評価値Lが与えられ、レベル2〜4が属するネガティブレベルには負の評価値が与えることができる。この評価値の設定は任意に定義することができ、ポジティブレベルに負の評価値Lを与え、ネガティブレベルに正の評価値を与えてもよい。
【表1】
【0034】
本実施形態に係る経路探索装置100は、各リンクの開始点の通過時から終端点を通過するまでの間に設定された観察タイミングにおいて判定された心理状態レベルに基づいて、その走行リンクの難易評価値(Weight)を求める。求められた難易評価値(Weight)は走行リンクと対応づけて地図情報200に少なくとも一時的に記憶される。ちなみに、難易評価値(Weight)の観察タイミング(観察時間)は識別可能であるので、観察タイミングにおける観察位置を含む走行リンクが特定すれば、難易評価値(Weight)と走行リンクとを対応づけることができる。なお、地図情報200は、リンクの長さ、リンクを定義するノードの位置情報、リンクに含まれる地点情報、リンクの運転し易さを示す難易評価値を含むリンク情報220を読み込み可能な状態で備えている。
【0035】
また、本実施形態の経路探索装置100は、出発地から目的地に至る一つのトリップが終わる度に、各リンクの難易評価値(Weight)を補正するための更新値(Weight link renew)を算出することができる。本実施形態では、現在、地図情報200に記憶されている判断対象となる走行リンクの難易評価値:Weight link current)と、今回の処理において算出された走行リンクの難易評価値とに基づく補正値とに基づいて、新たに地図情報200に記録されるべき難易評価値の更新値(Weight link renew)を算出することができる。
【0036】
特に限定されないが、本実施形態における補正値は、処理対象となる走行リンクの走行時に判定された心理状態のレベルに最も影響を与える心理状態レベルの支配値(mood_level(link current)と、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の中央値、最頻値、平均値その他の代表値に基づく補正因子とを用いて求めることができる。
【0037】
本実施形態における心理状態レベルの支配値(mood_level(link current)は、ある走行リンクの走行時に判定された心理状態レベルのうち、判定回数が最も多い心理状態レベルや、ある走行リンクの走行時に判定された心理状態レベルのうち、各心理状態レベルで走行した距離や時間が最も長い心理状態レベルとすることができる。たとえば、所定周期で心理状態レベルを判定した場合において、10kmのリンクのうち、7kmのリンクで同じレベル3の心理状態であると判定されたときは、支配値が評価値Lの「−0.2」又はこれに応じた値とすることができる。また、走行リンクの通過時間において、100個の判定結果のうち70個の判定結果がレベル3の心理状態であるときも、支配値が評価値Lの「−0.2」又はこれに応じた値とすることができる。
【0038】
難易評価値の更新値(Weight link renew)を求める式の一例を下式(数3)に示す。
【数3】
【0039】
数3に示すように、本実施形態では、前回までの処理において算出され、地図情報200に記憶されている現在の難易評価値(Weight link current)に、心理状態レベルの支配値(mood_level(link current)を、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の平均値である補正因子で除した補正因子を加えて、難易評価値の更新値(Weight link renew)を算出する。
【0040】
続いて、本実施形態に係る経路探索装置100の更新機能について説明する。本実施形態に係る経路探索装置100は、算出された走行リンクの難易評価値に基づいて、地図情報200に含まれる走行リンクに対応するリンクの難易評価値を記憶又は更新する。
【0041】
経路探索装置100は、出発地から目的地までの一つのトリップが終わる度に、走行したリンクに対応づけて地図情報200に記憶されている難易評価値に代えて、今回の難易評価値に基づいて算出された各リンクの難易評価値の更新値を記憶する。
【0042】
最後に、本実施形態に係る経路探索装置100の経路探索機能について説明する。本実施形態の経路探索装置100は、地図情報200を参照して探索された出発地から目的地に至る経路について、各経路に含まれる各リンクの難易評価値(更新されている場合は更新後の難易評価値)に基づいて各経路の走行難易度を算出し、この走行難易度に基づく推奨経路を探索する。
【0043】
特に限定されないが、本実施形態の経路探索装置100は、各リンクの難易評価値(更新後の難易評価値)にリンクの距離を乗じ、これをリンクの難易評価値(Weight)とする。そして、経路探索装置100は、出発地から目的地に至る経路に含まれる各リンクの難易評価値(Weight)を合計して、各経路の走行難易度を算出する。
【0044】
そして、本実施形態の経路探索装置100は、各経路の走行難易度を比較し、走行難易度が最も低い経路を推奨経路として探索することができる。もちろん、走行難易度とともに、経路の長さ、通行料金、通過所要時間などの経路選択の他の要因を考慮して、推奨経路を決定することができる。
【0045】
本実施形態では、下式(数4)に示すように、走行難易度の最も低い(難易評価値の値が最も高い)経路を選択する。
【数4】
【0046】
このように、走行難易度に基づく経路を推奨経路とすることができるので、ドライバ自身が実際に感じた走行し易さが反映された経路を探索することができる。
【0047】
以下に、各経路の走行難易度の具体的な算出例を、図5に示す地点及び経路を例にして説明する。本例では、図5の地点Aから地点Bまでの経路を考慮する。地点Aから地点Bに至る経路を一般的な手法により探索すると、経路Iと経路IIとが探索される。
【0048】
経路I及びIIの心理状態レベル、リンクの長さ、リンクの難易評価値、及びこれらに基づく経路の走行難易度を表2に示す。なお、リンクの難易評価値を求める評価値は表1に示すものを用いた。
【表2】
【0049】
表2に示すように、本例の経路Iに対するドライバの走行難易度は−0.3であり(走行難易度Path1= L1*2 + L2*1 + L2*10 + L1*2 + L1*2 + L1*3+ (L2*3 + L1*1 + L1*1) = - 0.3)、他方、経路IIに対するドライバの走行難易度は−2.3(走行難易度Path2 = L2*1 + L3*7 + L2*1 + L3*3 + L1*4.5 + (L2*3 + L1*1 + L1*1) = - 2.3)である。上記数4に従えば、値が最大となる経路Iが最も走行難易度が低い推奨経路となる。探索された推奨経路はドライバ自身の表情から判定された心理状態に基づくものであるので、各ドライバの走り易い経路を高い精度で探索することができる。
【0050】
また、図5に示す地図において、心理状態レベルが1のリンクには、矩形枠の中に笑顔が示されたマーク1を付し、心理状態レベルが2のリンクには、小さい太陽のマーク2を付し、心理状態レベルが3のリンクには大きい太陽のマーク3を付して、ドライバの心理状態と経路との対応関係を視認可能なように示している。心理状態レベルの大小を示すマークにより、どのルートがドライバ自身にとって走り易いかを目視で確認することができる。
【0051】
続いて、本実施形態の経路探索装置100の制御手順を、図6、図7に示すフローチャートに基づいて説明する。図6は地図情報の更新処理の制御手順を示し、図7は推奨経路の探索処理の制御手順を示すフローチャート図である。
【0052】
図6に示すように、ステップ101において、本実施形態の経路探索装置100は、走行開始をトリガとして難易評価値の算出及び記憶処理を開始する。
【0053】
ステップ102において、本実施形態の経路探索装置100は、観察タイミングとして観察時間Tを設定し、カメラ1によるドライバの頭部近傍の撮像を開始する。観察時間Tは数分から数時間の所定の長さで予め設定しておくことができる。
【0054】
次に、ステップ103において、本実施形態の経路探索装置100は、撮像画像から顔に対応する画像を検出し、目、鼻、口などの顔の特徴部分を追跡し、各特徴部分の位置に応じて、図3に示す各特徴領域を抽出する。特に限定されないが、本処理においては、覚醒度の影響が現れやすい眉間領域の画像と左右の頬領域の画像とを特徴領域として抽出する。
【0055】
特に限定されないが、経路探索装置100は、特徴領域の抽出処理を行う撮像画像として、顔に対応する画像に手などによって隠された部分(欠け)が無く、かつドライバの顔の向き(図3に示すZ軸方向からのずれ量)が正面を向いているものを、選択することができる。なお、観察時間Tの間に選択された撮像画像の数が所定数未満である場合には、正確な判定ができないとして気分判定処理を中止するようにすることもできる。
【0056】
ステップ104において、本実施形態の経路探索装置100は、主成分分析(PCA)の手法を用いて、各特徴領域の指標量(主成分スコア)をそれぞれ算出する。
【0057】
ステップ105において、本実施形態の経路探索装置100は、ステップ104において算出された観察時間Tにおける指標量と、基準となる基準観察時間T0における指標量との相関度を算出し、算出された相関度に基づいて、観察時間Tにおけるドライバの気分が図4に示す四つの気分レベルのうち、いずれのレベルに属するのかを判定する。
【0058】
上述のステップ102からステップ105の処理と並行して行われるステップ121において、経路探索装置100は現在位置検出装置200を用いて観察タイミングにおいて自車両が存在する観察位置を検出する。そして、ステップ122において、経路探索装置100は地図情報200を参照して、観察位置が含まれる走行リンクを特定する。
【0059】
続く、ステップ106において、経路探索装置100は、ステップ105において判定された観察タイミングにおけるユーザの心理状態レベルと、ステップ122において特定された走行リンクとを取得する。
【0060】
ステップ107において、経路探索装置100は、難易評価値を算出するトリガとして、車両が目的地に到着して走行が完了したか否かを判断する。難易評価値を算出するトリガは、目的地への到着に限定されず、任意の設定時刻、イグニッションキーオフ信号が入力されたとき、任意の設定時刻以後にイグニッションキー信号が入力されたときなどとすることができる。
【0061】
経路探索装置100は、走行が完了するまでステップ103以降の難易評価値の算出処理を継続する。算出された難易評価値は、少なくとも一時的に記憶しておくことができる。
【0062】
ステップ107において走行完了と判断された場合には、ステップ108へ進み、経路探索装置100は、ドライバの心理状態に基づいて各経路の難易評価値を算出する。
【0063】
また、ステップ109において、経路探索装置100は、今回記憶又は更新する難易評価値の更新値を求める際に、補正処理を行うことができる。本実施形態の経路探索装置100は、走行リンクの走行時に判定された心理状態のレベルに最も影響を与える心理状態レベルの支配値を、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の代表値に基づく補正因子で除して走行リンクの難易評価値の更新値を算出する。
【0064】
ステップ110において、経路探索装置100は、算出された経路探索装置100を地図情報200に記憶・更新する。
【0065】
次に、図7に基づいて、推奨経路の探索処理について説明する。ステップ201において、本実施形態の経路探索装置100は、経路探索要求が入力されると、推奨経路の探索処理を開始する。
【0066】
続いて、ステップ202において、本実施形態の経路探索装置100は、経路探索要求に伴って入力された目的地と、現在位置検出装置300から取得した出発地を取得する。
【0067】
ステップ203において、経路探索装置100は、地図情報300を読み込み、出発地から目的地までの経路を探索する。探索経路は複数であってもよい。
【0068】
ステップ204において、経路探索装置100は、探索された各経路に含まれる各リンクの難易評価値に基づいて各経路の走行難易度を算出する。
【0069】
次に、ステップ205において、経路探索装置100は、各経路の走行難易度を比較し、最も走行容易と評価する経路を推奨経路として選択し、ディスプレイ410に提示する。なお、走行難易度に加えて走行距離、料金、渋滞の程度を考慮する場合には、これらに重みづけをして総合的に評価することができる。
【0070】
ステップ206において、提示した推奨経路がドライバに承認された場合には、ステップ207へ進み、承認された経路を推奨経路として特定する。他方、承認されなかった場合には次に走行容易と評価される経路を選択し提示する。
【0071】
最後に、ステップ208において、特定された推奨経路の案内情報の提供を開始する。案内情報の提供手法は、一般的なナビゲーション装置において用いられる手法と共通する。
【0072】
なお、本実施形態では、難易評価値を含む経路情報の作成処理を行う経路探索装置100が車両に搭載された場合を例にして説明したが、本発明の本実施形態に係る経路情報の作成方法を、経路探索処理を行うクライアントコンピュータ(ナビゲーション装置、携帯電話などのコンピュータ)と情報の授受が可能な経路情報提供サーバ600(コンピュータ・制御装置)において実行することもできる。経路情報提供サーバは、クライアントと離隔した場所に配置され、クライアントコンピュータの要求に応じて、難易度評価値、走行難易度に関する情報を含む経路情報を提供することができる。
【0073】
クライアントコンピュータと情報の授受が可能な経路情報提供サーバ600は、以下の処理により経路情報の作成方法を実行することができる。具体的に、経路情報提供サーバ600は、観察タイミングにおいて撮像された、車両(移動体)を運転するドライバの頭部領域の撮像画像から、ドライバの顔の特徴領域をそれぞれ抽出してこの各特徴領域の指標量を算出するステップと、各特徴領域の指標量と、基準とする基準観察タイミングにおいて予め算出された各特徴領域の基準指標量との相関度に基づいて、観察タイミングにおけるドライバの心理状態のレベルを判定するステップと、観察タイミングにおけるドライバの心理状態のレベルに基づいて、ドライバが存在する観察位置を含む走行リンクの運転し易さを示す難易評価値を算出するステップと、算出された走行リンクの難易評価値を、経路情報672に含まれる走行リンクに応じたリンクに対応づけて記憶するステップとを実行することにより、経路情報612を作成する。
【0074】
特に限定されないが、経路情報612に含まれる難易評価値はユーザの識別情報ごとに整理することができる。これにより、ユーザごとの運転し易さを個別に反映させた経路情報を作成することができる。
【0075】
他方、複数のユーザから収集した難易評価値は統計的な処理を行って、一つの経路情報612として作成することができる。これにより、複数のユーザが実際に感じた運転のし易さの統計的傾向が反映された経路情報を作成することができる。
【0076】
本実施形態における経路情報提供サーバ600とナビゲーション装置1000(クライアントサーバ)とは、経路探索システムを構成することができる。クライアントコンピュータは、経路情報提供サーバ600の地図情報610にアクセスし、この地図情報610を参照して出発地から目的地に至る経路を探索するとともに、各経路に含まれる各リンクの難易評価値に基づく各経路の走行難易度に基づく推奨経路を探索することができる。処理の具体的な内容は、本実施形態の経路探索装置100、ナビゲーション装置1000と共通するのでこれらの説明を援用する。
【0077】
本発明の本実施形態の経路探索装置100は以上のように構成され、以上のように動作するので、以下の効果を奏する。
【0078】
本発明の本実施形態に係る経路探索装置100によれば、運転中のドライバの表情から求めた心理状態レベルに基づくリンクの難易評価値を地図情報200、610に記憶するので、ドライバ自身が過去の運転で実際に感じた運転のし易さ又は運転のし難さが反映された地図情報200、経路情報612を得ることができ、これらの情報を用いることにより各ドライバが運転しやすいと実感できる経路を探索することができる。
【0079】
本発明の本実施形態に係る経路探索装置100によれば、走行リンクの走行時に判定された心理状態のレベルに最も影響を与える心理状態レベルの支配値を用いて走行リンクの難易評価値の更新値を算出するので、走行時のドライバの実際の運転し易さ又は運転し難さを反映させて難易評価値を更新することができる。
【0080】
本発明の本実施形態に係る経路探索装置100によれば、走行全体におけるドライバの心理状態が反映された補正因子で、更新に用いられる支配値を除するので、あるリンクにおいて特徴的に観察されたドライバの心理状態が難易評価値に与える影響を緩和することができる。これにより、長い時間で観察したときに見られるドライバの心理状態を考慮して、各リンクの難易評価値を補正することができる。たとえば、長い時間で観察したときのドライバの心理状態は平常であるときに、一つの走行リンクにおいてドライバの一時的な表情によって心理状態がレベル4(激怒)と判定され、支配値が偏った値(小さい値)となった場合であっても、ドライバの基本的な心理状態(平常)に近づくように補正することができる。この結果、実際のドライバの心理状態を正確に難易評価値に反映させることができ、ドライバが実際に感じた走行し易さに合致した経路を探索することができる。
【0081】
本発明に係る実施形態の気分判定方法によれば、ドライバが実際に感じた難易評価値をリンクに対応づけた経路情報を作成できるので、上述の経路探索装置100と同様の作用を奏し、同様の効果を得ることができる。
【0082】
なお、以上説明したすべての実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【0083】
本明細書では、本発明に係る経路探索装置の一態様として経路探索装置100及びナビゲーション装置1000を例にして説明するが、本発明はこれに限定されるものではない。
【0084】
また、本明細書では、本発明に係る経路探索装置の一態様として、CPU11、ROM12、RAM13を含む制御装置10を備える経路探索装置100を一例として説明するが、これに限定されるものではない。
【0085】
また、本明細書では、画像取得手段と、指標量算出手段と、相関度算出手段と、判定手段と、評価値算出手段と、更新手段と、経路探索手段とを有する本発明に係る経路探索装置の一態様として、経路探索装置100を説明するが、これに限定されるものではない。
【0086】
本明細書では、本発明に係る経路探索装置の一態様として、本願発明に係る経路探索装置100と、地図情報200と、現在位置検出装置300と、出力装置400と、通信装置500とを備えたナビゲーション装置1000を例にして説明するが、本発明はこれに限定されるものではない。また、ナビゲーション装置1000と経路探索サーバ600とにより、経路探索システムを構成することができる。
【符号の説明】
【0087】
1000…ナビゲーション装置
100…経路探索装置
10…制御装置
11…CPU
12…ROM
13…RAM
1…カメラ
200…地図情報
300…現在位置検出装置
400…出力装置
500…通信装置
600…地図情報提供サーバ
【特許請求の範囲】
【請求項1】
リンク情報を含む地図情報を参照し、出発地から目的地に至る経路を探索する経路探索装置であって、
移動体の運転をするドライバの頭部領域を撮像可能なカメラを用いて、観察タイミングにおいて撮像された撮像画像を取得する画像取得手段と、
前記各撮像画像から前記ドライバの顔の特徴領域をそれぞれ抽出し、前記抽出された前記観察タイミングにおける各特徴領域の指標量をそれぞれ算出する指標量算出手段と、
前記算出された指標量と、基準となる基準観察タイミングにおいて予め算出された各特徴領域の基準指標量との相関度を算出する相関度算出手段と、
前記算出された相関度に基づいて前記観察タイミングにおけるドライバの心理状態のレベルを判定する判定手段と、
前記観察タイミングにおけるドライバの心理状態のレベルに基づいて、前記観察タイミングにおいて前記移動体が存在する観察位置を含む走行リンクの運転し易さを示す難易評価値を算出する評価値算出手段と、
前記算出された走行リンクの難易評価値に基づいて、前記地図情報に含まれる前記走行リンクに対応するリンクの難易評価値を記憶又は更新する更新手段と、
前記地図情報を参照して探索された前記出発地から目的地に至る経路について、前記各経路に含まれる各リンクの難易評価値に基づいて前記各経路の走行難易度を算出し、前記走行難易度に基づく推奨経路を探索する経路探索手段と、
を備える経路探索装置。
【請求項2】
前記評価値算出手段は、前記走行リンクの走行時に判定された前記心理状態のレベルに最も影響を与える心理状態レベルの支配値を求め、前記支配値を用いて前記走行リンクの難易評価値の更新値を算出し、
前記更新手段は、前記算出された更新値に基づいて、前記地図情報に記憶されている前記リンクの難易評価値を更新することを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記評価値算出手段は、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の代表値に基づく補正因子を算出し、前記支配値を前記補正因子で除して、前記更新値を算出することを特徴とする請求項2に記載の経路探索装置。
【請求項4】
出発地から目的地に至る経路を探索する際に用いられ、前記経路に含まれるリンクの情報を含む経路情報の作成方法であって、
観察タイミングにおいて撮像された、移動体を運転するドライバの頭部領域の撮像画像から、前記ドライバの顔の特徴領域をそれぞれ抽出して当該各特徴領域の指標量を算出し、
前記各特徴領域の指標量と、基準とする基準観察タイミングにおいて予め算出された各特徴領域の基準指標量との相関度に基づいて、観察タイミングにおけるドライバの心理状態のレベルを判定し、
前記観察タイミングにおけるドライバの心理状態のレベルに基づいて、前記ドライバが存在する観察位置を含む走行リンクの運転し易さを示す難易評価値を算出し、
前記算出された走行リンクの難易評価値を、前記経路情報に含まれる前記走行リンクに応じたリンクに対応づけて記憶することを特徴とする経路情報の作成方法。
【請求項1】
リンク情報を含む地図情報を参照し、出発地から目的地に至る経路を探索する経路探索装置であって、
移動体の運転をするドライバの頭部領域を撮像可能なカメラを用いて、観察タイミングにおいて撮像された撮像画像を取得する画像取得手段と、
前記各撮像画像から前記ドライバの顔の特徴領域をそれぞれ抽出し、前記抽出された前記観察タイミングにおける各特徴領域の指標量をそれぞれ算出する指標量算出手段と、
前記算出された指標量と、基準となる基準観察タイミングにおいて予め算出された各特徴領域の基準指標量との相関度を算出する相関度算出手段と、
前記算出された相関度に基づいて前記観察タイミングにおけるドライバの心理状態のレベルを判定する判定手段と、
前記観察タイミングにおけるドライバの心理状態のレベルに基づいて、前記観察タイミングにおいて前記移動体が存在する観察位置を含む走行リンクの運転し易さを示す難易評価値を算出する評価値算出手段と、
前記算出された走行リンクの難易評価値に基づいて、前記地図情報に含まれる前記走行リンクに対応するリンクの難易評価値を記憶又は更新する更新手段と、
前記地図情報を参照して探索された前記出発地から目的地に至る経路について、前記各経路に含まれる各リンクの難易評価値に基づいて前記各経路の走行難易度を算出し、前記走行難易度に基づく推奨経路を探索する経路探索手段と、
を備える経路探索装置。
【請求項2】
前記評価値算出手段は、前記走行リンクの走行時に判定された前記心理状態のレベルに最も影響を与える心理状態レベルの支配値を求め、前記支配値を用いて前記走行リンクの難易評価値の更新値を算出し、
前記更新手段は、前記算出された更新値に基づいて、前記地図情報に記憶されている前記リンクの難易評価値を更新することを特徴とする請求項1に記載の経路探索装置。
【請求項3】
前記評価値算出手段は、前回の更新タイミングから今回の更新タイミングまでに走行した更新対象経路に含まれるリンクの難易評価値の代表値に基づく補正因子を算出し、前記支配値を前記補正因子で除して、前記更新値を算出することを特徴とする請求項2に記載の経路探索装置。
【請求項4】
出発地から目的地に至る経路を探索する際に用いられ、前記経路に含まれるリンクの情報を含む経路情報の作成方法であって、
観察タイミングにおいて撮像された、移動体を運転するドライバの頭部領域の撮像画像から、前記ドライバの顔の特徴領域をそれぞれ抽出して当該各特徴領域の指標量を算出し、
前記各特徴領域の指標量と、基準とする基準観察タイミングにおいて予め算出された各特徴領域の基準指標量との相関度に基づいて、観察タイミングにおけるドライバの心理状態のレベルを判定し、
前記観察タイミングにおけるドライバの心理状態のレベルに基づいて、前記ドライバが存在する観察位置を含む走行リンクの運転し易さを示す難易評価値を算出し、
前記算出された走行リンクの難易評価値を、前記経路情報に含まれる前記走行リンクに応じたリンクに対応づけて記憶することを特徴とする経路情報の作成方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−2926(P2013−2926A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−133663(P2011−133663)
【出願日】平成23年6月15日(2011.6.15)
【出願人】(000003997)日産自動車株式会社 (16,386)
【出願人】(597040902)学校法人東京工芸大学 (28)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月15日(2011.6.15)
【出願人】(000003997)日産自動車株式会社 (16,386)
【出願人】(597040902)学校法人東京工芸大学 (28)
【Fターム(参考)】
[ Back to top ]