
経路探索装置
【課題】目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索する。
【解決手段】情報センタ3の制御装置16は、経路探索機能により探索した経路を車両が走行した場合に、当該車両が目的地に到着するまでに要する所要時間の変動量を示す変動情報と、所要時間の変動量に対するユーザの価値観を示す価値観情報とに基づいて、探索した経路がユーザの価値観に適合した経路であるか否かを判断する。
【解決手段】情報センタ3の制御装置16は、経路探索機能により探索した経路を車両が走行した場合に、当該車両が目的地に到着するまでに要する所要時間の変動量を示す変動情報と、所要時間の変動量に対するユーザの価値観を示す価値観情報とに基づいて、探索した経路がユーザの価値観に適合した経路であるか否かを判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目的地までの経路を探索する経路探索装置に関する。
【背景技術】
【0002】
この種の経路探索装置として、例えば特許文献1に記載の経路探索装置は、目的地に到着するまでに要する所要時間が最短となる経路を探索し、その経路を表示するものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−49273号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、目的地に到着するまでに要する所要時間に対するユーザの価値観は、ユーザごとに異なるものである。また、同一のユーザであっても、所要時間に対する価値観は目的地への移動の目的などに応じて異なってくる。従って、目的地までの所要時間に対する価値観に応じて、最適な経路も異なってくる。
即ち、例えば人との待ち合わせのために移動する場合に待ち合わせ時刻に合わせて目的地に到着したいというユーザにとっては、目的地に到着するまでに要する所要時間が短い経路(待ち合わせ時刻よりも早く目的地に到着してしまう経路)は適していない。また、待ち合わせ時刻よりも早く目的地に到着したいというユーザにとっては、待ち合わせ時刻に合わせて目的地に到着する経路は適していない。
また、例えば宅配業者や運送業者としては、希望する到着時刻に遅れることを回避することはもちろんであるが、希望する到着時刻よりも早く到着してしまうと不都合となる場合もある。そのため、目的地までの所要時間が例えば渋滞などにより大きく変動する可能性のある経路は回避したいという要望がある。
【0005】
本発明は上述の事情に鑑みてなされたものであり、その目的は、目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索することができる経路探索装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1の経路探索装置によれば、経路探索手段は、目的地までの経路を探索する。変動情報設定手段は、経路探索手段によって探索された経路を車両が走行した場合に、当該車両が目的地に到着するまでに要する所要時間の変動量を示す情報を変動情報として設定する。価値観情報設定手段は、所要時間の変動量に対するユーザの価値観を示す情報を価値観情報として設定する。適合度判断手段は、変動情報設定手段によって設定された変動情報と、価値観情報設定手段によって設定された価値観情報とに基づいて、経路探索手段によって探索された経路がユーザの価値観に適合した経路であるか否かを判断する。
これにより、目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索することができる。
【0007】
請求項2の経路探索装置によれば、適合度判断手段は、変動情報と価値観情報とに基づいて、所要時間が変動することに対してユーザが損失と感じる度合いを面積で示す情報を損失密度情報として算出し、この損失密度情報の面積の大きさに基づいて、経路探索手段によって探索された経路がユーザの価値観に適合した経路であるか否かを判断する。
これにより、主観的な要素(所要時間の変動量に対するユーザの価値観)を客観的な要素(損失密度情報の面積)に置き換えて経路の適合度を判断することができ、ユーザの価値観を加味した経路の探索を一層精度良く実行することができる。
【0008】
請求項3の経路探索装置によれば、希望到着時刻設定手段は、ユーザが希望する目的地への到着時刻を希望到着時刻として設定する。移動目的設定手段は、目的地への移動目的を設定する。価値観情報変化手段は、希望到着時刻設定手段によって設定された希望到着時刻および移動目的設定手段によって設定された移動目的の少なくとも何れか一方に基づいて、価値観情報を変化させる。
これにより、価値観情報をユーザの希望を反映した情報とすることができ、ユーザに適した経路の探索を一層精度良く実行することができる。
【0009】
請求項4の経路探索装置によれば、価値観情報変化手段は、適合度判断手段によって所要時間が相対的に短い経路がユーザの価値観に適合した経路であると判断されるように、価値観情報を変化させる。
これにより、目的地に早く到着することができる経路を、ユーザの価値観に適合した経路として優先的に選択することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1実施形態に係るものであり、カーナビゲーションシステムの構成を概略的に示すブロック図
【図2】リンク移動時間の統計情報を例示する図
【図3】変動情報を例示する図
【図4】価値観情報を例示する図
【図5】(a)は変動情報に価値観情報を重ねた状態を例示する図、(b)は損失密度情報を例示する図
【図6】異なる経路について損失度合いを求める場合を例示する図
【図7】価値観情報の変更パターンを例示する図
【図8】同一の経路について損失度合いを求める場合を例示する図
【図9】カーナビゲーションシステムにおける制御内容を示すフローチャート
【図10】経路探索処理の内容を示すフローチャート
【図11】本発明の第2実施形態に係るものであり、希望到着時刻設定画面を示す図
【図12】移動目的設定画面を示す図
【図13】価値観情報の変更態様を例示する図
【図14】価値観情報の変更パターンを例示する図
【図15】異なる経路について損失度合いを求める場合を例示する図
【図16】異なる経路について損失度合いを求める場合を例示する図
【図17】図9相当図
【図18】本発明の第3実施形態に係るものであり、異なる経路について損失度合いを求める場合を例示する図
【発明を実施するための形態】
【0011】
(第1実施形態)
以下、本発明の第1実施形態について、図1から図10を参照しながら説明する。
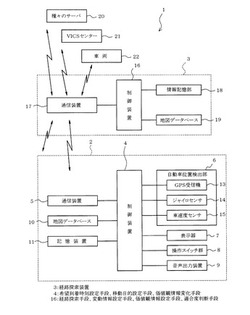
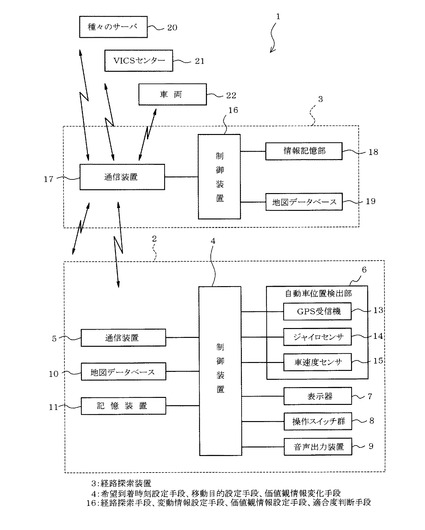
図1は、カーナビゲーションシステム1の構成を概略的に示している。このカーナビゲーションシステム1は、車両に搭載される車載器としてのナビゲーション装置2と、情報センタ3(経路探索装置に相当)とを備えて構成される。
前記ナビゲーション装置2は、コンピュータ(CPU)を主体として構成され全体を制御する制御装置4を備えると共に、その制御装置4に接続されて外部との無線通信を行う通信装置5、自車位置を検出するための位置検出部6、例えばフルカラー液晶ディスプレイからなる表示器7、タッチパネルやメカスイッチを含む操作スイッチ群8、音声出力装置9、地図データベース10などを備えて構成されている。また、前記制御装置4は記憶手段としての記憶装置11を有している。記憶装置11は、例えば不揮発性メモリなどの記憶媒体で構成されている。
【0012】
前記位置検出部6は、GPS用の人工衛星からの送信電波に基づいて自車両の位置を検出(測位)するGPS(Global Positioning System)のためのGPS受信機13、自車両の回転角速度を検出するジャイロセンサ14、車速度センサ15などを含んでいる。前記制御装置4は、そのソフトウェア構成(及びハードウェア構成)により、前記位置検出部6を構成する各センサ13〜15からの入力に基づいて、自車両の現在位置(絶対位置)、進行方向、速度や走行距離、現在時刻などを高精度で検出する。
そして、その自車の現在位置、及び、前記地図データベース10から得られる地図データに基づいて、前記表示器7の画面に、自車周辺の道路地図と共に自車の現在位置(及び進行方向)を重ね合せて表示させるロケーション機能を実現する。この場合、一般に、ロケーション機能を実現するにあたっては、自車の位置を、表示される電子地図上の道路に乗せるために、自車の移動軌跡と道路地図データ中の道路形状とを比較照合して、現在走行中の道路を推測するマップマッチングが行われる。
【0013】
前記地図データベース10は、例えば日本全土の道路地図データや、それに付随する、各種施設や店舗などの施設データなどを記憶するものである。前記道路地図データは、地図上の道路を、交差点などをノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点(ノード)の位置データ(経度,緯度)、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。また、リンクデータは、道路地図を表示器7の画面上に再生(描画)するためのデータも含んでいる。
【0014】
このナビゲーション装置2の制御装置4は、前記通信装置5により、例えば、図示しない無線基地局及びインターネットなどの通信ネットワークを介して、情報センタ3との間で通信(テレマティクス通信)を行うようになっている。前記通信装置5としては、携帯電話機、DSRC、無線LANなど様々なものを採用することができる。
ナビゲーション装置2の制御装置4は、通信装置5により、後述する経路探索リクエスト情報などの各種の情報を情報センタ3に対して送信する。また、ナビゲーション装置2の制御装置4は、情報センタ3から送信される後述する経路情報を通信装置5により取得(受信)する。
さらに、ナビゲーション装置2の制御装置4は、情報センタ3から取得した経路情報に基づいて車両の経路案内を実行する。周知のように、この経路案内は、表示器7の画面に走行すべき経路を道路地図に重ね合わせて表示すると共に、自車位置が所定のポイントに至ったときに音声出力装置9により案内音声を出力することにより行われる。
【0015】
一方、前記情報センタ3は、コンピュータを主体として構成された制御装置16を備えると共に、その制御装置16に接続された、外部との間で無線通信を行う通信手段たる通信装置17、経路探索に関連する各種情報を記憶する情報記憶部18、地図データベース19などを備えて構成されている。情報センタ3の制御装置16は、CPUにおいて制御プログラムを実行することにより、経路探索手段、変動情報設定手段、価値観情報設定手段、適合度判断手段をソフトウェアによって仮想的に実現する。前記通信装置17は、前記ナビゲーション装置2の通信装置5との間の無線通信を行なうようになっている。情報センタ3の制御装置16は、ナビゲーション装置2から送信される後述する経路探索リクエスト情報を、通信装置17による通信装置5との通信により取得(受信)する。また、情報センタ3の制御装置16は、後述する経路情報を通信装置17により送信する。
【0016】
また、情報センタ3の制御装置16は、例えば種々のサーバ20、VICSセンタ21、他の車両22などから送信されるプローブ情報を通信装置17により受信可能である。このプローブ情報は、交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)、環境情報(天候、風向き、路面状況などの情報)などの経路探索に有用な最新のデータを含む。また、情報センタ3の制御装置16は、通信装置17により受信した各種のプローブ情報を情報記憶部18に蓄積するようになっている。情報センタ3が備える地図データベース19には、経路探索用の最新の道路地図データが記憶されている。
【0017】
前記地図データベース19は、ナビゲーション装置2が備える地図データベース10と同様に、例えば日本全土の道路地図データや、それに付随する、各種施設や店舗などの施設データなどを記憶するものである。前記道路地図データは、地図上の道路を、交差点などをノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点(ノード)の位置データ(経度,緯度)、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。また、リンクデータは、道路地図をナビゲーション装置2の表示器7の画面上に再生(描画)するためのデータも含んでいる。さらに、リンクデータは、上述のプローブ情報に基づいて設定されたリンク移動時間を示すデータを含んでいる。このリンク移動時間は、そのリンクにおける車両の移動時間(そのリンク全体を車両が走行するのに要する所要時間)である。リンク移動時間を示すデータは、所定の期間にそのリンクを走行した車両から送信される。このリンク移動時間は、その車両が当該リンクを走行したときの渋滞状況や環境状況などによって変動する。情報センタ3の制御装置16は、多数の車両から受信したリンク移動時間を統計情報として記憶する。そして、記憶したリンク移動時間の平均値を、そのリンクのリンク旅行時間として算出し、算出したリンク旅行時間(多数のリンク移動時間の平均値)とリンク移動時間の分散値(リンク移動時間のばらつき度合いを示すデータ)とを記憶する。
【0018】
情報センタ3の制御装置16は、ナビゲーション装置2から経路探索リクエスト情報を受信すると、その経路探索リクエスト情報に含まれるデータと地図データベース19の道路地図データとに基づいて、指定された出発地(例えば自車両の現在位置)から目的地までの経路を探索する。これにて、ユーザにより指定された目的地までの推奨する走行経路を探索する経路探索機能が実現されるようになっている。この経路探索機能については後に詳細に説明する。そして、制御装置16は、その経路探索機能により探索した経路を、経路探索リクエスト情報を送信したナビゲーション装置2に送信する。
【0019】
次に、上記した経路探索機能について図2から図10を参照しながら詳細に説明する。
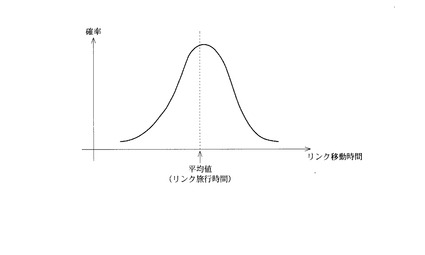
まず、図2は、情報センタ3の制御装置16が記憶するリンク移動時間の統計情報を概念的に示す図である。上述したように、制御装置16は、多数の車両からプローブ情報として受信したリンク移動時間と、当該リンク移動時間の分散値とを記憶する。従って、リンク移動時間の統計情報は、図2に示すように、リンク移動時間の平均値(リンク旅行時間)とリンク移動時間の分散値(リンク移動時間のばらつき度合い)とに基づく確率モデル(確立密度分布)で表現することができる。制御装置16は、図2に示すような統計情報を道路地図データに含まれるリンクごとに予め作成し記憶している。なお、制御装置16は、図2に示すような統計情報を適宜更新し、最新の統計情報を保持するようになっている。
【0020】
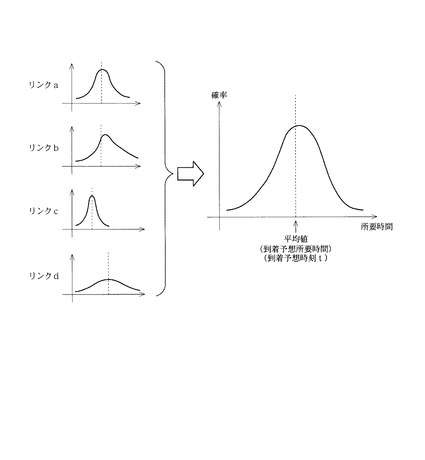
次に、図3は、情報センタ3の制御装置16が上述の経路探索機能により探索した経路を車両が走行した場合に当該車両が現在地から目的地に到着するまでに要する所要時間の変動量を示す統計情報(変動情報に相当)を概念的に示す図である。図3に示すように、目的地に到着するまでに要する所要時間は、探索された経路を構成する各リンクの統計情報(図2参照)の和により求められる。従って、このように求められる所要時間の統計情報も、図3に示すように、所要時間の平均値と所要時間の分散値とに基づく確率モデル(確立密度分布)で表現することができる。制御装置16は、探索した経路ごとに、図3に示すような統計情報を作成する。また、制御装置16は、所要時間の平均値を、目的地に到着するまでに要する予想所要時間(到着予想所要時間)として設定する。また、制御装置16は、その到着予想所要時間を現在時刻に加算した時刻を到着予想時刻tとして設定する。
【0021】
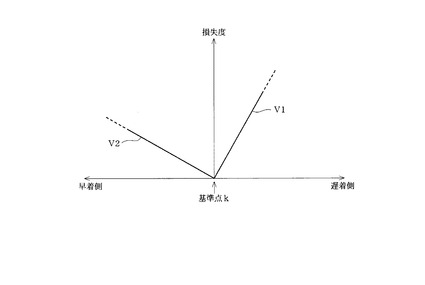
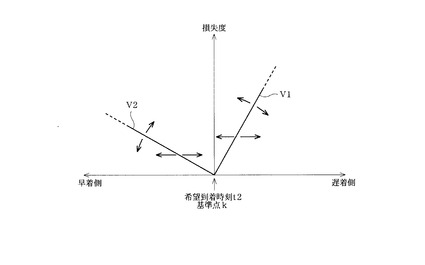
次に、図4は、目的地に到着するまでに要する所要時間が変動することに対してユーザが「損失した」と感じる度合い(損失度)を示す情報(価値観情報に相当)を概念的に示す図である。この場合、基準点kよりも右側の価値観線V1が目的地に遅着したこと(遅れて到着すること)に対する損失度を示し、基準点kよりも左側の価値観線V2が目的地に早着したこと(早く到着したこと)に対する損失度を示している。価値観線V1の傾きは、遅着したことに対してユーザが「損失した」と感じる傾向が高いほど大きく設定される。また、価値観線V2の傾きは、早着したことに対してユーザが「損失した」と感じる傾向が高いほど大きく設定される。なお、図4に示すパターンは、早着したことよりも遅刻したことに対してユーザが「損失した」と感じる傾向が高いパターンである。
【0022】
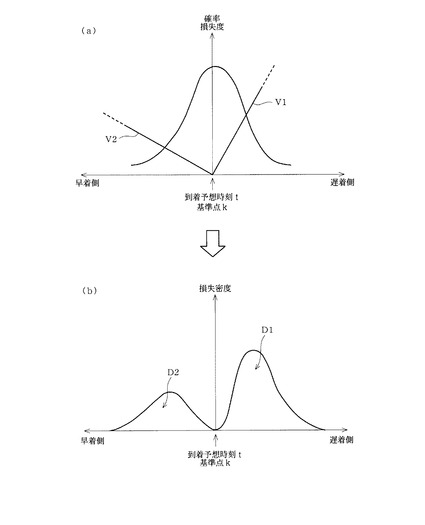
次に、図5(a)は、図3に示した統計情報(変動情報)に図4に示した情報(価値観情報)を重ねた状態を示している。この場合、情報センタ3の制御装置16は、価値観情報の基準点kの位置を変動情報の到着予想時刻t(所要時間の平均値)の位置に一致させる。
次に、図5(b)は、図5(a)に示す状態において、変動情報の値と価値観情報の値とを乗算した情報(損失密度情報に相当)を示す図である。この場合、到着予想時刻t(基準点k)を境界として左右に2つの領域D1,D2が形成される。到着予想時刻t(基準点k)よりも右側の領域D1は遅着したことに対する損失度合い(遅着したことに対してユーザが「損失した」と感じる度合い)を示す領域である。この領域D1の面積が大きいほど、遅着したことに対してユーザが「損失した」と感じる度合いは大きい。一方、到着予想時刻t(基準点k)よりも左側の領域D2は早着したことに対する損失度合い(早着したことに対してユーザが「損失した」と感じる度合い)を示す領域である。この領域D2の面積が大きいほど、早着したことに対してユーザが「損失した」と感じる度合いは大きい。
【0023】
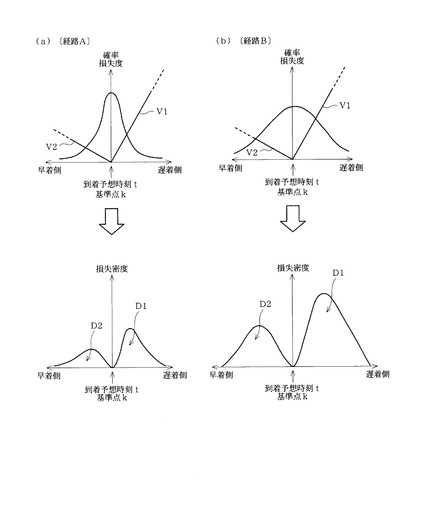
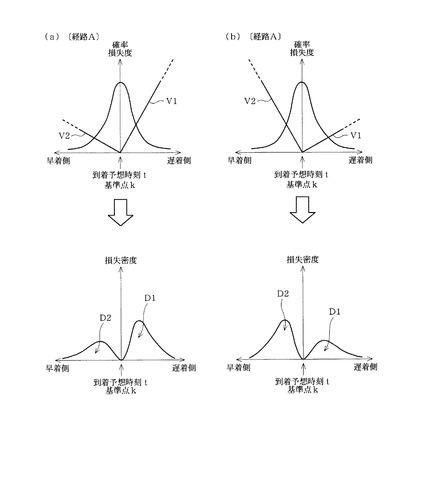
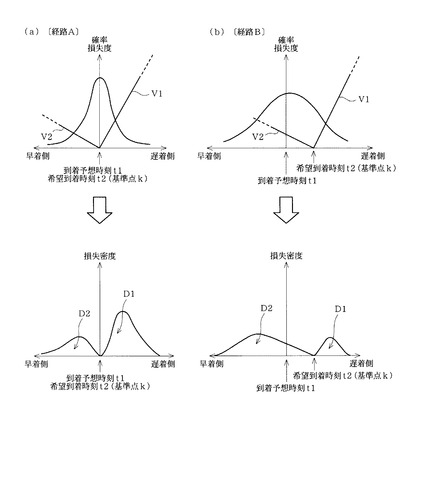
以上のようにして、制御装置16は、探索した経路について損失度合いを求める。図6は、異なる経路A,Bについてそれぞれ損失度合いを求めた場合の例を示している。図6(a)に示す経路Aは所要時間の分散値(ばらつき度合い)が小さい経路である。一方、図6(b)に示す経路Bは所要時間の分散値(ばらつき度合い)が大きい経路である。このように所要時間のばらつき度合いが異なる2つの経路A,Bの変動情報にそれぞれ同一の価値観情報(この場合、図4に示す価値観情報)を乗算した場合、所要時間のばらつき度合いが小さい経路Aについて得られる遅着側の損失度合い(図6(a)に示す領域D1の面積参照)は、所要時間のばらつき度合いが大きい経路Bについて得られる遅着側の損失度合い(図6(b)に示す領域D1の面積参照)よりも小さくなる。従って、早着した場合よりも遅着した場合に「損失した」と感じる傾向が大きいユーザにとっては、経路Bよりも、遅着側の損失度合いが小さくなる経路Aの方が適した経路であると判断できる。
【0024】
なお、この場合、経路Aついて得られる早着側の損失度合い(図6(a)に示す領域D2の面積参照)も、経路Bについて得られる早着側の損失度合い(図6(b)に示す領域D2の面積参照)よりも小さくなる。また、経路Aについて得られる遅着側および早着側の双方を含む全体の損失度合い(図6(a)に示す領域D1,D2の総面積参照)も、経路Bについて得られる遅着側および早着側の双方を含む全体の損失度合い(図6(b)に示す領域D1,D2の総面積参照)よりも小さくなる。従って、遅刻した場合よりも早着した場合に「損失した」と感じる傾向が大きいユーザ、或いは、遅刻しても早着しても「損失した」と感じる傾向が大きいユーザにとっても、上記の経路Aは、経路Bよりも適した経路であると判断できる。
【0025】
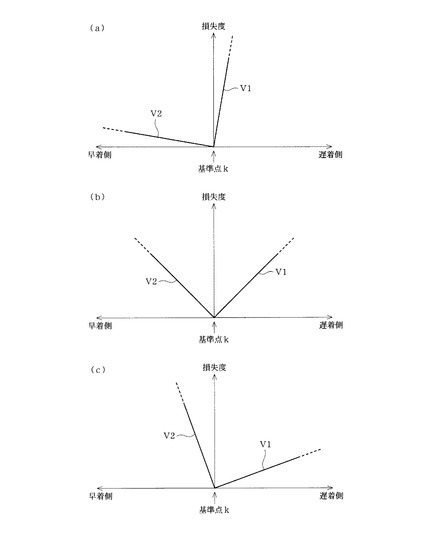
なお、上記の価値観情報(所要時間の変動量に対するユーザの価値観を示す情報)は、図4に示すパターンに限られるものではなく、種々のパターンを採用することができる。図7は、価値観情報の変更パターンの例を示している。図7(a)は、基準点kよりも右側の価値観線V1(遅着したことに対する価値観を示す)の傾きが極めて大きく、基準点kよりも左側の価値観線V2(早着したことに対する価値観を示す)の傾きが極めて小さいパターンである。このパターンは、例えば「目的地に早く着いても構わないが遅刻することは絶対に回避したい」という価値観を有するユーザに適したパターンである。
図7(b)は、基準点kよりも右側の価値観線V1(遅着したことに対する価値観を示す)の傾きと基準点kよりも左側の価値観線V2(早着したことに対する価値観を示す)の傾きとが同じとなるパターンである。このパターンは、例えば「遅着も早着も回避して到着予想時刻に合わせて目的地に到着したい」という価値観を有するユーザに適したパターンである。
図7(c)は、基準点kよりも右側の価値観線V1(遅着したことに対する価値観を示す)の傾きが小さく、基準点kよりも左側の価値観線V2(早着したことに対する価値観を示す)の傾きが大きいパターンである。このパターンは、図4に示すパターンと逆のパターンであり、例えば「目的地に遅刻することよりも早着することを回避したい」という価値観を有するユーザに適したパターンである。
【0026】
図8は、同一の経路Aについて、異なるパターンの価値観情報に基づいて損失度合いを求めた場合の例を示している。なお、図8(a)に示す価値観情報は図4に示したパターンであり、図8(b)に示す価値観情報は図7(c)に示したパターンである。このように所要時間のばらつき度合いが同じ経路Aの変動情報に対して異なるパターンの価値観情報をそれぞれ乗算した場合、図8(a)に示す価値観情報に基づいて得られる損失度合いは、遅着側(図8(a)に示す領域D1の面積参照)が大きくなり、早着側(図8(a)に示す領域D2の面積参照)が小さくなる。また、図8(b)に示す価値観情報に基づいて得られる損失度合いは、早着側(図8(b)に示す領域D2の面積参照)が大きくなり、遅着側(図8(b)に示す領域D1の面積参照)が小さくなる。このように、同一の経路Aであっても、損失度合いの演算に際して採用する価値観情報が異なれば、得られる損失度合いも異なるものとなる。従って、損失度合いの演算に際し、ユーザの価値観に適合した価値観情報を用いることにより、そのユーザに最適な経路(所要時間に対するユーザの価値観に適合した経路)を探索することができる。
【0027】
なお、価値観情報は、この場合、ナビゲーション装置2において設定可能に構成されている。この価値観情報は、例えば、ユーザにより適宜変更して設定できるようにしてもよいし、ナビゲーション装置2が搭載される車両の車種に合わせて予め設定しておくようにしてもよい。また、ナビゲーション装置2の制御装置4に、ユーザの走行特性を学習する学習機能を備え、学習した走行特性に応じて価値観情報を設定するようにしてもよい。また、入力された目的地に応じて価値観情報を設定するようにしてもよい。ナビゲーション装置2の制御装置4は、設定された価値観情報を記憶装置11に記憶し、記憶した価値観情報を適宜読み出し可能に構成されている。
【0028】
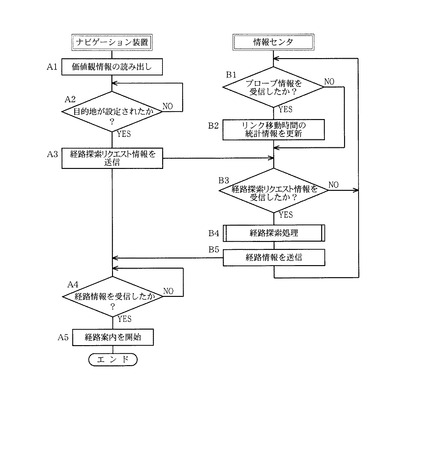
次に、上述のカーナビゲーションシステム1における制御フローについて図9を参照しながら説明する。
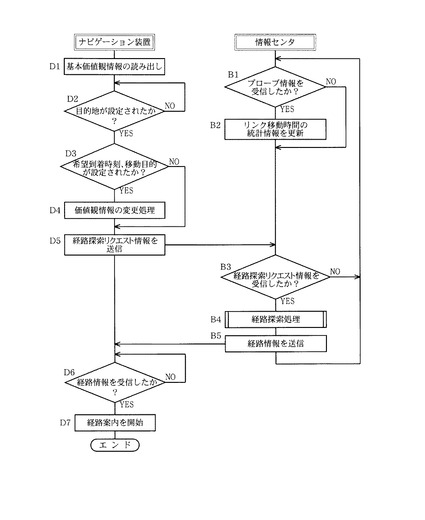
まず、ナビゲーション装置2の制御装置4は、価値観情報を読み出す(ステップA1)。そして、制御装置4は、目的地が設定されたか否かを判断する(ステップA2)。制御装置4は、目的地が設定されると(ステップA2:YES)、経路探索リクエスト情報を送信する(ステップA3)。この経路探索リクエスト情報には、少なくとも、ステップA1において読み出した価値観情報、車両の現在位置(経路案内の出発地)のデータ、設定された目的地のデータが含まれる。制御装置4は、経路探索リクエスト情報を送信すると、後述する経路情報を受信したか否かを判断する(ステップA4)。
【0029】
一方、情報センタ3の制御装置16は、各車両からプローブ情報を受信すると(ステップB1:YES)、受信したプローブ情報に基づいてリンク移動時間の統計情報(図2参照)を更新する(ステップB2)。そして、制御装置16は、経路探索リクエスト信号を受信したか否かを判断する(ステップB3)。制御装置16は、経路探索リクエスト信号を受信すると(ステップB3:YES)、経路探索処理を実行する(ステップB4)。
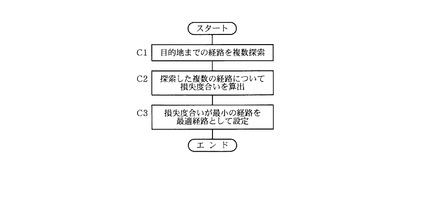
図10は、経路探索処理の内容を示すフローチャートである。情報センタ3の制御装置16は、受信した経路探索リクエスト情報に含まれる目的地の情報に基づいて、当該目的地までの経路を複数(この場合、5つ)探索する(ステップC1)。次に制御装置16は、探索した複数の経路について、上述した方法により、それぞれ損失度合いを算出する(ステップC2)。そして、制御装置16は、算出した損失度合いが最小となる経路を最適経路として設定し(ステップC3)、この経路探索処理を終了する。
情報センタ3の制御装置16は、経路探索処理を終了すると、当該経路探索処理により求めた最適経路を表示するための情報(経路情報)を送信し(ステップB5)、再び、プローブ情報の受信、或いは、経路探索リクエスト情報の受信の有無を判断する(ステップB1,B3)。
【0030】
ナビゲーション装置2の制御装置4は、経路情報を受信すると(ステップA4:YES)、受信した経路情報に基づいて最適経路を表示器7の画面に表示し、当該最適経路による経路案内を開始する(ステップA5)。
【0031】
以上に説明したように本実施形態によれば、情報センタ3の制御装置16は、変動情報(経路探索機能によって探索した経路を車両が走行した場合に、当該車両が目的地に到着するまでに要する所要時間の変動量を示す情報)と、価値観情報(所要時間の変動量に対するユーザの価値観を示す情報)とに基づいて、探索された経路がユーザの価値観に適合した経路であるか否かを判断する。これにより、目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索することができる。
また、情報センタ3の制御装置16は、変動情報と価値観情報とに基づいて損失密度情報(所要時間が変動することに対してユーザが「損失した)と感じる度合いを面積で示す情報)を算出し、この損失密度情報の面積の大きさに基づいて、探索された経路がユーザの価値観に適合した経路であるか否かを判断する。これにより、主観的な要素(所要時間の変動量に対するユーザの価値観)を客観的な要素(損失密度情報の面積)に置き換えて経路の適合度を判断することができ、ユーザの価値観を加味した経路の探索を一層精度良く実行することができる。
【0032】
(第2実施形態)
次に、本発明の第2実施形態について図11から図17を参照しながら説明する。
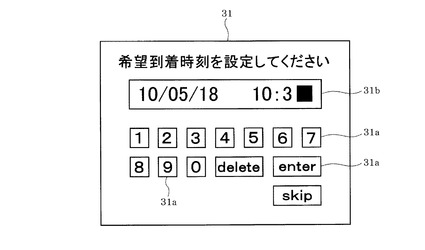
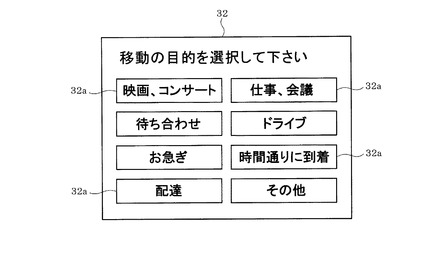
本実施形態では、ナビゲーション装置2の制御装置4は、図11に示す希望到着時刻設定画面31を表示器7の画面に表示可能に構成されており、これにより、希望到着時刻設定手段として機能する。また、ナビゲーション装置2の制御装置4は、図12に示す移動目的設定画面32を表示器7の画面に表示可能に構成されており、これにより、移動目的設定手段として機能する。希望到着時刻設定画面31には、ユーザが希望する目的地への到着時刻(希望到着時刻)や時間帯(希望到着時間帯)を入力するための各種の操作キー31aおよび入力された希望到着時刻や希望到着時間帯を表示する表示部31bが設けられている。ユーザは、各種の操作キー31aを操作することにより、希望する目的地への到着時刻や希望到着時間帯をナビゲーション装置2に入力する。また、移動目的設定画面32には、目的地への移動目的を入力するための各種の操作キー32aが設けられている。ユーザは、各種の操作キー32aを操作することにより、目的地への移動目的をナビゲーション装置2に入力する。
【0033】
ナビゲーション装置2の制御装置4は、CPUにおいて制御プログラムを実行することにより、価値観情報変化手段をソフトウェアによって仮想的に実現する。即ち、制御装置4は、希望到着時刻設定画面31を介して入力された希望到着時刻、或いは、移動目的設定画面32を介して入力された移動目的の少なくとも何れか一方に基づいて価値観情報の価値観線V1,V2の傾きや位置を変更する(図13に示す矢印参照)。図14は、入力された移動目的に応じた価値観情報の変更パターンの例を示す図である。なお、ナビゲーション装置2の制御装置4は、この場合、図4に示すパターンの価値観情報を基本価値観情報として記憶している。ここで、ナビゲーション装置2の制御装置4が記憶する基本価値観情報は、図4に示すパターンの価値観情報に限られるものではなく、種々のパターンの価値観情報を採用することができる。
【0034】
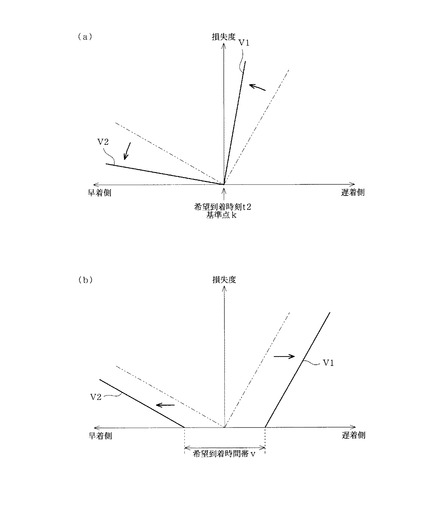
例えば、入力された移動目的が「映画・コンサート」や「仕事・会議」である場合には、制御装置4は、基本価値観情報を図14(a)に示すパターンに変更する。このパターンは、入力された希望到着時刻t2に価値観情報の基準点kを一致させ(希望到着時刻t2における価値観情報の値を「0」とし)、且つ、遅着側の価値観線V1の傾きを大きく変更し、早着側の価値観線V2の傾きを小さく変更したものである。移動目的が「映画・コンサート」や「仕事・会議」である場合、目的地までの所要時間に対してユーザが有する価値観としては「目的地に早く着いても構わないが遅刻することは絶対に回避したい」というものが考えられる。そのため、制御装置4は、基本価値観情報を図14(a)に示すパターンに変更する。
【0035】
なお、ナビゲーション装置2の制御装置4は、入力された希望到着時間帯vに基づいて価値観情報を変更することも可能である。ユーザが宅配業者や運送業者などである場合には、希望到着時刻として特定の時刻を指定するのではなく、希望到着時刻に許容時間を設けたい場合、つまり、特定の時間帯(例えば19:00〜21:00など)を指定したい場合がある。そのため、制御装置4は、入力された移動目的が例えば「配達」である場合には、基本価値観情報を図14(b)に示すパターンに変更する。このパターンは、遅着側の価値観線V1と早着側の価値観線V2との間に、入力された希望到着時間帯vに応じた間隔を設けたパターンである。
【0036】
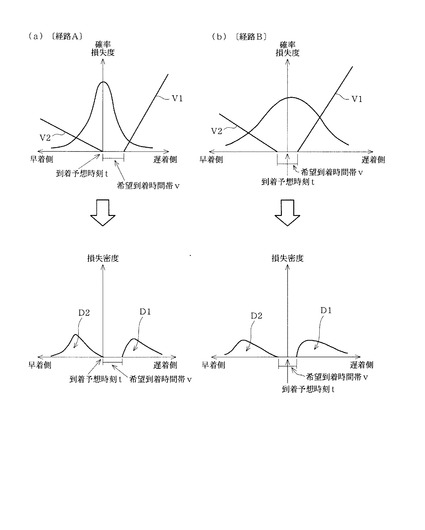
図15は、異なる経路A,Bについてそれぞれ損失度合いを求めた場合の例を示している。図15(a)に示す経路Aは所要時間の分散値(ばらつき度合い)が小さい経路である。また、この図15(a)に示す例は、経路Aによる到着予想時刻t1と入力された希望到着時刻t2(当該希望到着時刻t2に一致するように変更された価値観情報の基準点kの位置)とが一致する場合の例である。一方、図15(b)に示す経路Bは所要時間の分散値(ばらつき度合い)が大きい経路である。また、この図15(b)に示す例は、経路Bによる到着予想時刻t1と入力された希望到着時刻t2(当該希望到着時刻t2に一致するように変更された価値観情報の基準点kの位置)とが異なる場合の例である。
【0037】
この場合、所要時間のばらつき度合いが小さい経路Aについて得られる遅着側の損失度合い(図15(a)に示す領域D1の面積参照)は、所要時間のばらつき度合いが大きい経路Bについて得られる遅着側の損失度合い(図15(b)に示す領域D1の面積参照)よりも大きくなる。従って、希望到着時刻t2よりも早く到着した場合よりも遅く到着した場合に「損失した」と感じる傾向が大きいユーザにとっては、経路Aよりも、遅着側の損失度合いが小さくなる経路Bの方が適した経路であると判断できる。このように、所要時間のばらつき度合いが大きい経路Bであっても、ユーザの希望到着時刻t2に応じて価値観情報の基準点kの位置が変化することにより、そのユーザにとって適した経路となる場合がある。
【0038】
図16は、異なる経路A,Bについて図14(b)に示した価値観線を適用して損失度合いを求めた場合の例を示している。図16(a)に示す経路Aは所要時間の分散値(ばらつき度合い)が小さい経路である。また、この図16(a)に示す例は、経路Aによる到着予想時刻tと入力された希望到着時間帯vの始点とが一致する場合の例である。一方、図16(b)に示す経路Bは所要時間の分散値(ばらつき度合い)が大きい経路である。また、この図16(b)に示す例は、経路Bによる到着予想時刻tが入力された希望到着時間帯v内に含まれる場合の例である。
【0039】
この場合、所要時間のばらつき度合いが小さい経路Aについて得られる遅着側および早着側の双方を含む全体の損失度合い(図16(a)に示す領域D1,D2の総面積参照)は、所要時間のばらつき度合いが大きい経路Bについて得られる遅着側および早着側の双方を含む全体の損失度合い(図16(a)に示す領域D1,D2の総面積参照)と同等となる。従って、例えば「配達」を選択したユーザ(宅配業者など)にとっては、経路A,Bの何れも適した経路であると判断できる。
【0040】
次に、本実施形態における制御フローについて図17を参照しながら説明する。
まず、ナビゲーション装置2の制御装置4は、予め記憶している基本価値観情報を読み出す(ステップD1)。そして、制御装置4は、目的地が設定されたか否かを判断する(ステップD2)。制御装置4は、目的地が設定されると(ステップD2:YES)、希望到着時刻および移動目的の少なくとも何れか一方が設定されたか否かを判断する(ステップD3)。制御装置4は、希望到着時刻および移動目的の少なくとも何れか一方が設定されると(ステップD3:YES)、価値観情報の変更処理を実行する(ステップD4)。この価値観情報の変更処理では、制御装置4は、設定された希望到着時刻および移動目的の少なくとも何れか一方の情報に基づいて、上述したように価値観情報を変更する。なお、制御装置4は、希望到着時刻および移動目的の何れも設定されない場合には(ステップD3:NO)、ステップD1において読み出した基本価値観情報を変更することなく保持する。
【0041】
次に、制御装置4は、経路探索リクエスト情報を送信する(ステップD5)。この経路探索リクエスト情報には、少なくとも、ステップD1において読み出した基本価値観情報またはステップD4において変更した価値観情報、車両の現在位置(経路案内の出発地)のデータ、設定された目的地のデータが含まれる。制御装置4は、経路探索リクエスト情報を送信すると、経路情報を受信したか否かを判断する(ステップD6)。そして、ナビゲーション装置2の制御装置4は、経路情報を受信すると(ステップD6:YES)、受信した経路情報に基づいて最適経路を表示器7の画面に表示し、当該最適経路による経路案内を開始する(ステップD7)。なお、情報センタ3の制御装置16における制御内容は図9および図10に示した内容と同様である。
【0042】
以上に説明したように本実施形態によれば、ナビゲーション装置2の制御装置は、希望到着時刻設定画面31を介して設定された希望到着時刻および移動目的設定画面32を介して設定された移動目的の少なくとも何れか一方に基づいて、基本価値観情報を変化させる。これにより、価値観情報をユーザの希望を反映した情報とすることができ、ユーザに適した経路の探索を一層精度良く実行することができる。
【0043】
(第3実施形態)
次に、本発明の第3実施形態について図18を参照しながら説明する。
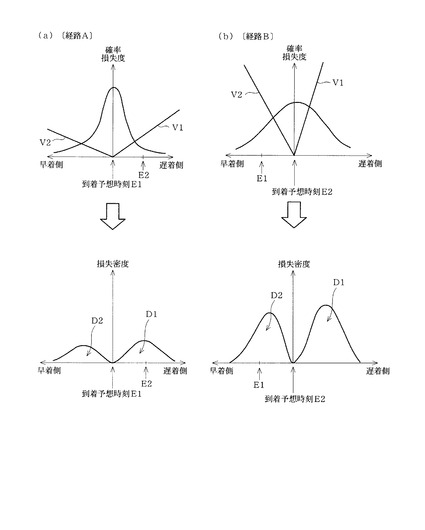
図18は、異なる経路A,Bについてそれぞれ損失度合いを求めた場合の例を示している。図18(a)に示す経路Aは到着予想時刻(目的地までの所要時間の平均値)が相対的に早い時刻E1となる経路である。一方、図18(b)に示す経路Bは到着予想時刻(目的地までの所要時間の平均値)が相対的に遅い時刻E2となる経路である。
この場合、制御装置4は、相対的に早い到着予想時刻E1となる経路Aに対しては、遅着側および早着側の双方において価値観情報の価値観線V1,V2の傾きを小さく設定する。一方、制御装置4は、相対的に遅い到着予想時刻E2となる経路Bに対しては、遅着側および早着側の双方において価値観情報の価値観線V1,V2の傾きを大きく設定する。
【0044】
このように設定した価値観情報に基づいて経路A,Bについてそれぞれ損失度合いを求めると、到着予想時刻E1が相対的に早い経路Aについて得られる早着側の損失度合い(図18(a)に示す領域D2の面積参照)は、到着予想時刻E2が相対的に遅い経路Bについて得られる早着側の損失度合い(図18(b)に示す領域D2の面積参照)よりも小さくなる。従って、早着した場合よりも遅刻した場合に「損失した」と感じる傾向が大きいユーザにとっては、経路Bよりも、早着側の損失度合いが小さくなる経路Aの方が適した経路であると判断できる。多くのユーザは、基本的には、目的地に早く到着することを求める傾向がある。そのため、制御装置4は、到着予想時刻E1が相対的に早い経路Aに対しては価値観情報の価値観線V1,V2の傾きを小さく設定し、これにより、経路Aについて得られる損失度合いを相対的に小さくする。
【0045】
なお、この場合、経路Aついて得られる遅着側の損失度合い(図18(a)に示す領域D1の面積参照)も、経路Bについて得られる遅着側の損失度合い(図18(b)に示す領域D1の面積参照)よりも小さくなる。また、経路Aについて得られる遅着側および早着側の双方を含む全体の損失度合い(図18(a)に示す領域D1,D2の総面積参照)も、経路Bについて得られる遅着側および早着側の双方を含む全体の損失度合い(図18(b)に示す領域D1,D2の総面積参照)よりも小さくなる。従って、早着した場合よりも遅刻した場合に「損失した」と感じる傾向が大きいユーザ、或いは、遅刻しても早着しても「損失した」と感じる傾向が大きいユーザにとっても、上記の経路Aは、経路Bよりも適した経路であると判断できる。
【0046】
以上に説明したように本実施形態によれば、ナビゲーション装置2の制御装置4は、情報センタ3の制御装置16によって到着予想時刻E1(目的地までの所要時間)が相対的に短い経路Aがユーザの価値観に適合した経路であると判断されるように、価値観情報を変化させる。これにより、目的地に早く到着することができる経路を、ユーザの価値観に適合した経路として優先的に選択することができる。
【0047】
(その他の実施形態)
本発明は、上述した各実施形態にのみ限定されるものではなく、例えば次のように変形または拡張することができる。
情報センタ3の制御装置16は、探索した複数の経路のうちの1つを最適経路として設定して経路情報として送信するのではなく、探索した複数の経路と各経路について算出した損失度合いとを含む情報を経路情報として送信する構成としてもよい。この場合、ナビゲーション装置2の制御装置4は、受信した経路情報に基づいて複数の経路と各経路の損失度合いとを対応付けて表示器7の画面に表示し、ユーザが何れかの経路を選択できる構成とするとよい。
情報センタ3の制御装置16が備える上述の経路探索機能(本発明に係る機能)をナビゲーション装置2の制御装置4に備えた構成、つまり、ナビゲーション装置2を本発明の経路探索装置としたスタンドアロン構成としてもよい。
価値観情報を構成する価値観線V1,V2は、直線状でなくてもよく、例えば曲線状に設定してもよい。
ナビゲーション装置2の制御装置4は、経路探索リクエスト情報に自車両(車体)に関するデータ(車両の種類、排気量、走行性能などを示すデータ)を含むように構成してもよい。そして、この自車両に関するデータも経路探索処理に反映させるようにするとよい。
【符号の説明】
【0048】
図面中、3は情報センタ(経路探索装置)、4は制御装置(希望到着時刻設定手段、移動目的設定手段、価値観情報変化手段)、16は制御装置(経路探索手段、変動情報設定手段、価値観情報設定手段、適合度判断手段)を示す。
【技術分野】
【0001】
本発明は、目的地までの経路を探索する経路探索装置に関する。
【背景技術】
【0002】
この種の経路探索装置として、例えば特許文献1に記載の経路探索装置は、目的地に到着するまでに要する所要時間が最短となる経路を探索し、その経路を表示するものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−49273号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、目的地に到着するまでに要する所要時間に対するユーザの価値観は、ユーザごとに異なるものである。また、同一のユーザであっても、所要時間に対する価値観は目的地への移動の目的などに応じて異なってくる。従って、目的地までの所要時間に対する価値観に応じて、最適な経路も異なってくる。
即ち、例えば人との待ち合わせのために移動する場合に待ち合わせ時刻に合わせて目的地に到着したいというユーザにとっては、目的地に到着するまでに要する所要時間が短い経路(待ち合わせ時刻よりも早く目的地に到着してしまう経路)は適していない。また、待ち合わせ時刻よりも早く目的地に到着したいというユーザにとっては、待ち合わせ時刻に合わせて目的地に到着する経路は適していない。
また、例えば宅配業者や運送業者としては、希望する到着時刻に遅れることを回避することはもちろんであるが、希望する到着時刻よりも早く到着してしまうと不都合となる場合もある。そのため、目的地までの所要時間が例えば渋滞などにより大きく変動する可能性のある経路は回避したいという要望がある。
【0005】
本発明は上述の事情に鑑みてなされたものであり、その目的は、目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索することができる経路探索装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1の経路探索装置によれば、経路探索手段は、目的地までの経路を探索する。変動情報設定手段は、経路探索手段によって探索された経路を車両が走行した場合に、当該車両が目的地に到着するまでに要する所要時間の変動量を示す情報を変動情報として設定する。価値観情報設定手段は、所要時間の変動量に対するユーザの価値観を示す情報を価値観情報として設定する。適合度判断手段は、変動情報設定手段によって設定された変動情報と、価値観情報設定手段によって設定された価値観情報とに基づいて、経路探索手段によって探索された経路がユーザの価値観に適合した経路であるか否かを判断する。
これにより、目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索することができる。
【0007】
請求項2の経路探索装置によれば、適合度判断手段は、変動情報と価値観情報とに基づいて、所要時間が変動することに対してユーザが損失と感じる度合いを面積で示す情報を損失密度情報として算出し、この損失密度情報の面積の大きさに基づいて、経路探索手段によって探索された経路がユーザの価値観に適合した経路であるか否かを判断する。
これにより、主観的な要素(所要時間の変動量に対するユーザの価値観)を客観的な要素(損失密度情報の面積)に置き換えて経路の適合度を判断することができ、ユーザの価値観を加味した経路の探索を一層精度良く実行することができる。
【0008】
請求項3の経路探索装置によれば、希望到着時刻設定手段は、ユーザが希望する目的地への到着時刻を希望到着時刻として設定する。移動目的設定手段は、目的地への移動目的を設定する。価値観情報変化手段は、希望到着時刻設定手段によって設定された希望到着時刻および移動目的設定手段によって設定された移動目的の少なくとも何れか一方に基づいて、価値観情報を変化させる。
これにより、価値観情報をユーザの希望を反映した情報とすることができ、ユーザに適した経路の探索を一層精度良く実行することができる。
【0009】
請求項4の経路探索装置によれば、価値観情報変化手段は、適合度判断手段によって所要時間が相対的に短い経路がユーザの価値観に適合した経路であると判断されるように、価値観情報を変化させる。
これにより、目的地に早く到着することができる経路を、ユーザの価値観に適合した経路として優先的に選択することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1実施形態に係るものであり、カーナビゲーションシステムの構成を概略的に示すブロック図
【図2】リンク移動時間の統計情報を例示する図
【図3】変動情報を例示する図
【図4】価値観情報を例示する図
【図5】(a)は変動情報に価値観情報を重ねた状態を例示する図、(b)は損失密度情報を例示する図
【図6】異なる経路について損失度合いを求める場合を例示する図
【図7】価値観情報の変更パターンを例示する図
【図8】同一の経路について損失度合いを求める場合を例示する図
【図9】カーナビゲーションシステムにおける制御内容を示すフローチャート
【図10】経路探索処理の内容を示すフローチャート
【図11】本発明の第2実施形態に係るものであり、希望到着時刻設定画面を示す図
【図12】移動目的設定画面を示す図
【図13】価値観情報の変更態様を例示する図
【図14】価値観情報の変更パターンを例示する図
【図15】異なる経路について損失度合いを求める場合を例示する図
【図16】異なる経路について損失度合いを求める場合を例示する図
【図17】図9相当図
【図18】本発明の第3実施形態に係るものであり、異なる経路について損失度合いを求める場合を例示する図
【発明を実施するための形態】
【0011】
(第1実施形態)
以下、本発明の第1実施形態について、図1から図10を参照しながら説明する。
図1は、カーナビゲーションシステム1の構成を概略的に示している。このカーナビゲーションシステム1は、車両に搭載される車載器としてのナビゲーション装置2と、情報センタ3(経路探索装置に相当)とを備えて構成される。
前記ナビゲーション装置2は、コンピュータ(CPU)を主体として構成され全体を制御する制御装置4を備えると共に、その制御装置4に接続されて外部との無線通信を行う通信装置5、自車位置を検出するための位置検出部6、例えばフルカラー液晶ディスプレイからなる表示器7、タッチパネルやメカスイッチを含む操作スイッチ群8、音声出力装置9、地図データベース10などを備えて構成されている。また、前記制御装置4は記憶手段としての記憶装置11を有している。記憶装置11は、例えば不揮発性メモリなどの記憶媒体で構成されている。
【0012】
前記位置検出部6は、GPS用の人工衛星からの送信電波に基づいて自車両の位置を検出(測位)するGPS(Global Positioning System)のためのGPS受信機13、自車両の回転角速度を検出するジャイロセンサ14、車速度センサ15などを含んでいる。前記制御装置4は、そのソフトウェア構成(及びハードウェア構成)により、前記位置検出部6を構成する各センサ13〜15からの入力に基づいて、自車両の現在位置(絶対位置)、進行方向、速度や走行距離、現在時刻などを高精度で検出する。
そして、その自車の現在位置、及び、前記地図データベース10から得られる地図データに基づいて、前記表示器7の画面に、自車周辺の道路地図と共に自車の現在位置(及び進行方向)を重ね合せて表示させるロケーション機能を実現する。この場合、一般に、ロケーション機能を実現するにあたっては、自車の位置を、表示される電子地図上の道路に乗せるために、自車の移動軌跡と道路地図データ中の道路形状とを比較照合して、現在走行中の道路を推測するマップマッチングが行われる。
【0013】
前記地図データベース10は、例えば日本全土の道路地図データや、それに付随する、各種施設や店舗などの施設データなどを記憶するものである。前記道路地図データは、地図上の道路を、交差点などをノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点(ノード)の位置データ(経度,緯度)、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。また、リンクデータは、道路地図を表示器7の画面上に再生(描画)するためのデータも含んでいる。
【0014】
このナビゲーション装置2の制御装置4は、前記通信装置5により、例えば、図示しない無線基地局及びインターネットなどの通信ネットワークを介して、情報センタ3との間で通信(テレマティクス通信)を行うようになっている。前記通信装置5としては、携帯電話機、DSRC、無線LANなど様々なものを採用することができる。
ナビゲーション装置2の制御装置4は、通信装置5により、後述する経路探索リクエスト情報などの各種の情報を情報センタ3に対して送信する。また、ナビゲーション装置2の制御装置4は、情報センタ3から送信される後述する経路情報を通信装置5により取得(受信)する。
さらに、ナビゲーション装置2の制御装置4は、情報センタ3から取得した経路情報に基づいて車両の経路案内を実行する。周知のように、この経路案内は、表示器7の画面に走行すべき経路を道路地図に重ね合わせて表示すると共に、自車位置が所定のポイントに至ったときに音声出力装置9により案内音声を出力することにより行われる。
【0015】
一方、前記情報センタ3は、コンピュータを主体として構成された制御装置16を備えると共に、その制御装置16に接続された、外部との間で無線通信を行う通信手段たる通信装置17、経路探索に関連する各種情報を記憶する情報記憶部18、地図データベース19などを備えて構成されている。情報センタ3の制御装置16は、CPUにおいて制御プログラムを実行することにより、経路探索手段、変動情報設定手段、価値観情報設定手段、適合度判断手段をソフトウェアによって仮想的に実現する。前記通信装置17は、前記ナビゲーション装置2の通信装置5との間の無線通信を行なうようになっている。情報センタ3の制御装置16は、ナビゲーション装置2から送信される後述する経路探索リクエスト情報を、通信装置17による通信装置5との通信により取得(受信)する。また、情報センタ3の制御装置16は、後述する経路情報を通信装置17により送信する。
【0016】
また、情報センタ3の制御装置16は、例えば種々のサーバ20、VICSセンタ21、他の車両22などから送信されるプローブ情報を通信装置17により受信可能である。このプローブ情報は、交通情報(渋滞、事故、工事、車線規制、交通規制などの情報)、環境情報(天候、風向き、路面状況などの情報)などの経路探索に有用な最新のデータを含む。また、情報センタ3の制御装置16は、通信装置17により受信した各種のプローブ情報を情報記憶部18に蓄積するようになっている。情報センタ3が備える地図データベース19には、経路探索用の最新の道路地図データが記憶されている。
【0017】
前記地図データベース19は、ナビゲーション装置2が備える地図データベース10と同様に、例えば日本全土の道路地図データや、それに付随する、各種施設や店舗などの施設データなどを記憶するものである。前記道路地図データは、地図上の道路を、交差点などをノードとして複数の部分に分割し、各ノード間の部分をリンクとして規定したリンクデータとして与えられる。このリンクデータは、リンク固有のリンクID(識別子)、リンク長、リンクの始点,終点(ノード)の位置データ(経度,緯度)、角度(方向)データ、道路幅、道路種別などのデータを含んで構成される。また、リンクデータは、道路地図をナビゲーション装置2の表示器7の画面上に再生(描画)するためのデータも含んでいる。さらに、リンクデータは、上述のプローブ情報に基づいて設定されたリンク移動時間を示すデータを含んでいる。このリンク移動時間は、そのリンクにおける車両の移動時間(そのリンク全体を車両が走行するのに要する所要時間)である。リンク移動時間を示すデータは、所定の期間にそのリンクを走行した車両から送信される。このリンク移動時間は、その車両が当該リンクを走行したときの渋滞状況や環境状況などによって変動する。情報センタ3の制御装置16は、多数の車両から受信したリンク移動時間を統計情報として記憶する。そして、記憶したリンク移動時間の平均値を、そのリンクのリンク旅行時間として算出し、算出したリンク旅行時間(多数のリンク移動時間の平均値)とリンク移動時間の分散値(リンク移動時間のばらつき度合いを示すデータ)とを記憶する。
【0018】
情報センタ3の制御装置16は、ナビゲーション装置2から経路探索リクエスト情報を受信すると、その経路探索リクエスト情報に含まれるデータと地図データベース19の道路地図データとに基づいて、指定された出発地(例えば自車両の現在位置)から目的地までの経路を探索する。これにて、ユーザにより指定された目的地までの推奨する走行経路を探索する経路探索機能が実現されるようになっている。この経路探索機能については後に詳細に説明する。そして、制御装置16は、その経路探索機能により探索した経路を、経路探索リクエスト情報を送信したナビゲーション装置2に送信する。
【0019】
次に、上記した経路探索機能について図2から図10を参照しながら詳細に説明する。
まず、図2は、情報センタ3の制御装置16が記憶するリンク移動時間の統計情報を概念的に示す図である。上述したように、制御装置16は、多数の車両からプローブ情報として受信したリンク移動時間と、当該リンク移動時間の分散値とを記憶する。従って、リンク移動時間の統計情報は、図2に示すように、リンク移動時間の平均値(リンク旅行時間)とリンク移動時間の分散値(リンク移動時間のばらつき度合い)とに基づく確率モデル(確立密度分布)で表現することができる。制御装置16は、図2に示すような統計情報を道路地図データに含まれるリンクごとに予め作成し記憶している。なお、制御装置16は、図2に示すような統計情報を適宜更新し、最新の統計情報を保持するようになっている。
【0020】
次に、図3は、情報センタ3の制御装置16が上述の経路探索機能により探索した経路を車両が走行した場合に当該車両が現在地から目的地に到着するまでに要する所要時間の変動量を示す統計情報(変動情報に相当)を概念的に示す図である。図3に示すように、目的地に到着するまでに要する所要時間は、探索された経路を構成する各リンクの統計情報(図2参照)の和により求められる。従って、このように求められる所要時間の統計情報も、図3に示すように、所要時間の平均値と所要時間の分散値とに基づく確率モデル(確立密度分布)で表現することができる。制御装置16は、探索した経路ごとに、図3に示すような統計情報を作成する。また、制御装置16は、所要時間の平均値を、目的地に到着するまでに要する予想所要時間(到着予想所要時間)として設定する。また、制御装置16は、その到着予想所要時間を現在時刻に加算した時刻を到着予想時刻tとして設定する。
【0021】
次に、図4は、目的地に到着するまでに要する所要時間が変動することに対してユーザが「損失した」と感じる度合い(損失度)を示す情報(価値観情報に相当)を概念的に示す図である。この場合、基準点kよりも右側の価値観線V1が目的地に遅着したこと(遅れて到着すること)に対する損失度を示し、基準点kよりも左側の価値観線V2が目的地に早着したこと(早く到着したこと)に対する損失度を示している。価値観線V1の傾きは、遅着したことに対してユーザが「損失した」と感じる傾向が高いほど大きく設定される。また、価値観線V2の傾きは、早着したことに対してユーザが「損失した」と感じる傾向が高いほど大きく設定される。なお、図4に示すパターンは、早着したことよりも遅刻したことに対してユーザが「損失した」と感じる傾向が高いパターンである。
【0022】
次に、図5(a)は、図3に示した統計情報(変動情報)に図4に示した情報(価値観情報)を重ねた状態を示している。この場合、情報センタ3の制御装置16は、価値観情報の基準点kの位置を変動情報の到着予想時刻t(所要時間の平均値)の位置に一致させる。
次に、図5(b)は、図5(a)に示す状態において、変動情報の値と価値観情報の値とを乗算した情報(損失密度情報に相当)を示す図である。この場合、到着予想時刻t(基準点k)を境界として左右に2つの領域D1,D2が形成される。到着予想時刻t(基準点k)よりも右側の領域D1は遅着したことに対する損失度合い(遅着したことに対してユーザが「損失した」と感じる度合い)を示す領域である。この領域D1の面積が大きいほど、遅着したことに対してユーザが「損失した」と感じる度合いは大きい。一方、到着予想時刻t(基準点k)よりも左側の領域D2は早着したことに対する損失度合い(早着したことに対してユーザが「損失した」と感じる度合い)を示す領域である。この領域D2の面積が大きいほど、早着したことに対してユーザが「損失した」と感じる度合いは大きい。
【0023】
以上のようにして、制御装置16は、探索した経路について損失度合いを求める。図6は、異なる経路A,Bについてそれぞれ損失度合いを求めた場合の例を示している。図6(a)に示す経路Aは所要時間の分散値(ばらつき度合い)が小さい経路である。一方、図6(b)に示す経路Bは所要時間の分散値(ばらつき度合い)が大きい経路である。このように所要時間のばらつき度合いが異なる2つの経路A,Bの変動情報にそれぞれ同一の価値観情報(この場合、図4に示す価値観情報)を乗算した場合、所要時間のばらつき度合いが小さい経路Aについて得られる遅着側の損失度合い(図6(a)に示す領域D1の面積参照)は、所要時間のばらつき度合いが大きい経路Bについて得られる遅着側の損失度合い(図6(b)に示す領域D1の面積参照)よりも小さくなる。従って、早着した場合よりも遅着した場合に「損失した」と感じる傾向が大きいユーザにとっては、経路Bよりも、遅着側の損失度合いが小さくなる経路Aの方が適した経路であると判断できる。
【0024】
なお、この場合、経路Aついて得られる早着側の損失度合い(図6(a)に示す領域D2の面積参照)も、経路Bについて得られる早着側の損失度合い(図6(b)に示す領域D2の面積参照)よりも小さくなる。また、経路Aについて得られる遅着側および早着側の双方を含む全体の損失度合い(図6(a)に示す領域D1,D2の総面積参照)も、経路Bについて得られる遅着側および早着側の双方を含む全体の損失度合い(図6(b)に示す領域D1,D2の総面積参照)よりも小さくなる。従って、遅刻した場合よりも早着した場合に「損失した」と感じる傾向が大きいユーザ、或いは、遅刻しても早着しても「損失した」と感じる傾向が大きいユーザにとっても、上記の経路Aは、経路Bよりも適した経路であると判断できる。
【0025】
なお、上記の価値観情報(所要時間の変動量に対するユーザの価値観を示す情報)は、図4に示すパターンに限られるものではなく、種々のパターンを採用することができる。図7は、価値観情報の変更パターンの例を示している。図7(a)は、基準点kよりも右側の価値観線V1(遅着したことに対する価値観を示す)の傾きが極めて大きく、基準点kよりも左側の価値観線V2(早着したことに対する価値観を示す)の傾きが極めて小さいパターンである。このパターンは、例えば「目的地に早く着いても構わないが遅刻することは絶対に回避したい」という価値観を有するユーザに適したパターンである。
図7(b)は、基準点kよりも右側の価値観線V1(遅着したことに対する価値観を示す)の傾きと基準点kよりも左側の価値観線V2(早着したことに対する価値観を示す)の傾きとが同じとなるパターンである。このパターンは、例えば「遅着も早着も回避して到着予想時刻に合わせて目的地に到着したい」という価値観を有するユーザに適したパターンである。
図7(c)は、基準点kよりも右側の価値観線V1(遅着したことに対する価値観を示す)の傾きが小さく、基準点kよりも左側の価値観線V2(早着したことに対する価値観を示す)の傾きが大きいパターンである。このパターンは、図4に示すパターンと逆のパターンであり、例えば「目的地に遅刻することよりも早着することを回避したい」という価値観を有するユーザに適したパターンである。
【0026】
図8は、同一の経路Aについて、異なるパターンの価値観情報に基づいて損失度合いを求めた場合の例を示している。なお、図8(a)に示す価値観情報は図4に示したパターンであり、図8(b)に示す価値観情報は図7(c)に示したパターンである。このように所要時間のばらつき度合いが同じ経路Aの変動情報に対して異なるパターンの価値観情報をそれぞれ乗算した場合、図8(a)に示す価値観情報に基づいて得られる損失度合いは、遅着側(図8(a)に示す領域D1の面積参照)が大きくなり、早着側(図8(a)に示す領域D2の面積参照)が小さくなる。また、図8(b)に示す価値観情報に基づいて得られる損失度合いは、早着側(図8(b)に示す領域D2の面積参照)が大きくなり、遅着側(図8(b)に示す領域D1の面積参照)が小さくなる。このように、同一の経路Aであっても、損失度合いの演算に際して採用する価値観情報が異なれば、得られる損失度合いも異なるものとなる。従って、損失度合いの演算に際し、ユーザの価値観に適合した価値観情報を用いることにより、そのユーザに最適な経路(所要時間に対するユーザの価値観に適合した経路)を探索することができる。
【0027】
なお、価値観情報は、この場合、ナビゲーション装置2において設定可能に構成されている。この価値観情報は、例えば、ユーザにより適宜変更して設定できるようにしてもよいし、ナビゲーション装置2が搭載される車両の車種に合わせて予め設定しておくようにしてもよい。また、ナビゲーション装置2の制御装置4に、ユーザの走行特性を学習する学習機能を備え、学習した走行特性に応じて価値観情報を設定するようにしてもよい。また、入力された目的地に応じて価値観情報を設定するようにしてもよい。ナビゲーション装置2の制御装置4は、設定された価値観情報を記憶装置11に記憶し、記憶した価値観情報を適宜読み出し可能に構成されている。
【0028】
次に、上述のカーナビゲーションシステム1における制御フローについて図9を参照しながら説明する。
まず、ナビゲーション装置2の制御装置4は、価値観情報を読み出す(ステップA1)。そして、制御装置4は、目的地が設定されたか否かを判断する(ステップA2)。制御装置4は、目的地が設定されると(ステップA2:YES)、経路探索リクエスト情報を送信する(ステップA3)。この経路探索リクエスト情報には、少なくとも、ステップA1において読み出した価値観情報、車両の現在位置(経路案内の出発地)のデータ、設定された目的地のデータが含まれる。制御装置4は、経路探索リクエスト情報を送信すると、後述する経路情報を受信したか否かを判断する(ステップA4)。
【0029】
一方、情報センタ3の制御装置16は、各車両からプローブ情報を受信すると(ステップB1:YES)、受信したプローブ情報に基づいてリンク移動時間の統計情報(図2参照)を更新する(ステップB2)。そして、制御装置16は、経路探索リクエスト信号を受信したか否かを判断する(ステップB3)。制御装置16は、経路探索リクエスト信号を受信すると(ステップB3:YES)、経路探索処理を実行する(ステップB4)。
図10は、経路探索処理の内容を示すフローチャートである。情報センタ3の制御装置16は、受信した経路探索リクエスト情報に含まれる目的地の情報に基づいて、当該目的地までの経路を複数(この場合、5つ)探索する(ステップC1)。次に制御装置16は、探索した複数の経路について、上述した方法により、それぞれ損失度合いを算出する(ステップC2)。そして、制御装置16は、算出した損失度合いが最小となる経路を最適経路として設定し(ステップC3)、この経路探索処理を終了する。
情報センタ3の制御装置16は、経路探索処理を終了すると、当該経路探索処理により求めた最適経路を表示するための情報(経路情報)を送信し(ステップB5)、再び、プローブ情報の受信、或いは、経路探索リクエスト情報の受信の有無を判断する(ステップB1,B3)。
【0030】
ナビゲーション装置2の制御装置4は、経路情報を受信すると(ステップA4:YES)、受信した経路情報に基づいて最適経路を表示器7の画面に表示し、当該最適経路による経路案内を開始する(ステップA5)。
【0031】
以上に説明したように本実施形態によれば、情報センタ3の制御装置16は、変動情報(経路探索機能によって探索した経路を車両が走行した場合に、当該車両が目的地に到着するまでに要する所要時間の変動量を示す情報)と、価値観情報(所要時間の変動量に対するユーザの価値観を示す情報)とに基づいて、探索された経路がユーザの価値観に適合した経路であるか否かを判断する。これにより、目的地に到着するまでに要する所要時間に対するユーザの価値観を加味した経路を探索することができる。
また、情報センタ3の制御装置16は、変動情報と価値観情報とに基づいて損失密度情報(所要時間が変動することに対してユーザが「損失した)と感じる度合いを面積で示す情報)を算出し、この損失密度情報の面積の大きさに基づいて、探索された経路がユーザの価値観に適合した経路であるか否かを判断する。これにより、主観的な要素(所要時間の変動量に対するユーザの価値観)を客観的な要素(損失密度情報の面積)に置き換えて経路の適合度を判断することができ、ユーザの価値観を加味した経路の探索を一層精度良く実行することができる。
【0032】
(第2実施形態)
次に、本発明の第2実施形態について図11から図17を参照しながら説明する。
本実施形態では、ナビゲーション装置2の制御装置4は、図11に示す希望到着時刻設定画面31を表示器7の画面に表示可能に構成されており、これにより、希望到着時刻設定手段として機能する。また、ナビゲーション装置2の制御装置4は、図12に示す移動目的設定画面32を表示器7の画面に表示可能に構成されており、これにより、移動目的設定手段として機能する。希望到着時刻設定画面31には、ユーザが希望する目的地への到着時刻(希望到着時刻)や時間帯(希望到着時間帯)を入力するための各種の操作キー31aおよび入力された希望到着時刻や希望到着時間帯を表示する表示部31bが設けられている。ユーザは、各種の操作キー31aを操作することにより、希望する目的地への到着時刻や希望到着時間帯をナビゲーション装置2に入力する。また、移動目的設定画面32には、目的地への移動目的を入力するための各種の操作キー32aが設けられている。ユーザは、各種の操作キー32aを操作することにより、目的地への移動目的をナビゲーション装置2に入力する。
【0033】
ナビゲーション装置2の制御装置4は、CPUにおいて制御プログラムを実行することにより、価値観情報変化手段をソフトウェアによって仮想的に実現する。即ち、制御装置4は、希望到着時刻設定画面31を介して入力された希望到着時刻、或いは、移動目的設定画面32を介して入力された移動目的の少なくとも何れか一方に基づいて価値観情報の価値観線V1,V2の傾きや位置を変更する(図13に示す矢印参照)。図14は、入力された移動目的に応じた価値観情報の変更パターンの例を示す図である。なお、ナビゲーション装置2の制御装置4は、この場合、図4に示すパターンの価値観情報を基本価値観情報として記憶している。ここで、ナビゲーション装置2の制御装置4が記憶する基本価値観情報は、図4に示すパターンの価値観情報に限られるものではなく、種々のパターンの価値観情報を採用することができる。
【0034】
例えば、入力された移動目的が「映画・コンサート」や「仕事・会議」である場合には、制御装置4は、基本価値観情報を図14(a)に示すパターンに変更する。このパターンは、入力された希望到着時刻t2に価値観情報の基準点kを一致させ(希望到着時刻t2における価値観情報の値を「0」とし)、且つ、遅着側の価値観線V1の傾きを大きく変更し、早着側の価値観線V2の傾きを小さく変更したものである。移動目的が「映画・コンサート」や「仕事・会議」である場合、目的地までの所要時間に対してユーザが有する価値観としては「目的地に早く着いても構わないが遅刻することは絶対に回避したい」というものが考えられる。そのため、制御装置4は、基本価値観情報を図14(a)に示すパターンに変更する。
【0035】
なお、ナビゲーション装置2の制御装置4は、入力された希望到着時間帯vに基づいて価値観情報を変更することも可能である。ユーザが宅配業者や運送業者などである場合には、希望到着時刻として特定の時刻を指定するのではなく、希望到着時刻に許容時間を設けたい場合、つまり、特定の時間帯(例えば19:00〜21:00など)を指定したい場合がある。そのため、制御装置4は、入力された移動目的が例えば「配達」である場合には、基本価値観情報を図14(b)に示すパターンに変更する。このパターンは、遅着側の価値観線V1と早着側の価値観線V2との間に、入力された希望到着時間帯vに応じた間隔を設けたパターンである。
【0036】
図15は、異なる経路A,Bについてそれぞれ損失度合いを求めた場合の例を示している。図15(a)に示す経路Aは所要時間の分散値(ばらつき度合い)が小さい経路である。また、この図15(a)に示す例は、経路Aによる到着予想時刻t1と入力された希望到着時刻t2(当該希望到着時刻t2に一致するように変更された価値観情報の基準点kの位置)とが一致する場合の例である。一方、図15(b)に示す経路Bは所要時間の分散値(ばらつき度合い)が大きい経路である。また、この図15(b)に示す例は、経路Bによる到着予想時刻t1と入力された希望到着時刻t2(当該希望到着時刻t2に一致するように変更された価値観情報の基準点kの位置)とが異なる場合の例である。
【0037】
この場合、所要時間のばらつき度合いが小さい経路Aについて得られる遅着側の損失度合い(図15(a)に示す領域D1の面積参照)は、所要時間のばらつき度合いが大きい経路Bについて得られる遅着側の損失度合い(図15(b)に示す領域D1の面積参照)よりも大きくなる。従って、希望到着時刻t2よりも早く到着した場合よりも遅く到着した場合に「損失した」と感じる傾向が大きいユーザにとっては、経路Aよりも、遅着側の損失度合いが小さくなる経路Bの方が適した経路であると判断できる。このように、所要時間のばらつき度合いが大きい経路Bであっても、ユーザの希望到着時刻t2に応じて価値観情報の基準点kの位置が変化することにより、そのユーザにとって適した経路となる場合がある。
【0038】
図16は、異なる経路A,Bについて図14(b)に示した価値観線を適用して損失度合いを求めた場合の例を示している。図16(a)に示す経路Aは所要時間の分散値(ばらつき度合い)が小さい経路である。また、この図16(a)に示す例は、経路Aによる到着予想時刻tと入力された希望到着時間帯vの始点とが一致する場合の例である。一方、図16(b)に示す経路Bは所要時間の分散値(ばらつき度合い)が大きい経路である。また、この図16(b)に示す例は、経路Bによる到着予想時刻tが入力された希望到着時間帯v内に含まれる場合の例である。
【0039】
この場合、所要時間のばらつき度合いが小さい経路Aについて得られる遅着側および早着側の双方を含む全体の損失度合い(図16(a)に示す領域D1,D2の総面積参照)は、所要時間のばらつき度合いが大きい経路Bについて得られる遅着側および早着側の双方を含む全体の損失度合い(図16(a)に示す領域D1,D2の総面積参照)と同等となる。従って、例えば「配達」を選択したユーザ(宅配業者など)にとっては、経路A,Bの何れも適した経路であると判断できる。
【0040】
次に、本実施形態における制御フローについて図17を参照しながら説明する。
まず、ナビゲーション装置2の制御装置4は、予め記憶している基本価値観情報を読み出す(ステップD1)。そして、制御装置4は、目的地が設定されたか否かを判断する(ステップD2)。制御装置4は、目的地が設定されると(ステップD2:YES)、希望到着時刻および移動目的の少なくとも何れか一方が設定されたか否かを判断する(ステップD3)。制御装置4は、希望到着時刻および移動目的の少なくとも何れか一方が設定されると(ステップD3:YES)、価値観情報の変更処理を実行する(ステップD4)。この価値観情報の変更処理では、制御装置4は、設定された希望到着時刻および移動目的の少なくとも何れか一方の情報に基づいて、上述したように価値観情報を変更する。なお、制御装置4は、希望到着時刻および移動目的の何れも設定されない場合には(ステップD3:NO)、ステップD1において読み出した基本価値観情報を変更することなく保持する。
【0041】
次に、制御装置4は、経路探索リクエスト情報を送信する(ステップD5)。この経路探索リクエスト情報には、少なくとも、ステップD1において読み出した基本価値観情報またはステップD4において変更した価値観情報、車両の現在位置(経路案内の出発地)のデータ、設定された目的地のデータが含まれる。制御装置4は、経路探索リクエスト情報を送信すると、経路情報を受信したか否かを判断する(ステップD6)。そして、ナビゲーション装置2の制御装置4は、経路情報を受信すると(ステップD6:YES)、受信した経路情報に基づいて最適経路を表示器7の画面に表示し、当該最適経路による経路案内を開始する(ステップD7)。なお、情報センタ3の制御装置16における制御内容は図9および図10に示した内容と同様である。
【0042】
以上に説明したように本実施形態によれば、ナビゲーション装置2の制御装置は、希望到着時刻設定画面31を介して設定された希望到着時刻および移動目的設定画面32を介して設定された移動目的の少なくとも何れか一方に基づいて、基本価値観情報を変化させる。これにより、価値観情報をユーザの希望を反映した情報とすることができ、ユーザに適した経路の探索を一層精度良く実行することができる。
【0043】
(第3実施形態)
次に、本発明の第3実施形態について図18を参照しながら説明する。
図18は、異なる経路A,Bについてそれぞれ損失度合いを求めた場合の例を示している。図18(a)に示す経路Aは到着予想時刻(目的地までの所要時間の平均値)が相対的に早い時刻E1となる経路である。一方、図18(b)に示す経路Bは到着予想時刻(目的地までの所要時間の平均値)が相対的に遅い時刻E2となる経路である。
この場合、制御装置4は、相対的に早い到着予想時刻E1となる経路Aに対しては、遅着側および早着側の双方において価値観情報の価値観線V1,V2の傾きを小さく設定する。一方、制御装置4は、相対的に遅い到着予想時刻E2となる経路Bに対しては、遅着側および早着側の双方において価値観情報の価値観線V1,V2の傾きを大きく設定する。
【0044】
このように設定した価値観情報に基づいて経路A,Bについてそれぞれ損失度合いを求めると、到着予想時刻E1が相対的に早い経路Aについて得られる早着側の損失度合い(図18(a)に示す領域D2の面積参照)は、到着予想時刻E2が相対的に遅い経路Bについて得られる早着側の損失度合い(図18(b)に示す領域D2の面積参照)よりも小さくなる。従って、早着した場合よりも遅刻した場合に「損失した」と感じる傾向が大きいユーザにとっては、経路Bよりも、早着側の損失度合いが小さくなる経路Aの方が適した経路であると判断できる。多くのユーザは、基本的には、目的地に早く到着することを求める傾向がある。そのため、制御装置4は、到着予想時刻E1が相対的に早い経路Aに対しては価値観情報の価値観線V1,V2の傾きを小さく設定し、これにより、経路Aについて得られる損失度合いを相対的に小さくする。
【0045】
なお、この場合、経路Aついて得られる遅着側の損失度合い(図18(a)に示す領域D1の面積参照)も、経路Bについて得られる遅着側の損失度合い(図18(b)に示す領域D1の面積参照)よりも小さくなる。また、経路Aについて得られる遅着側および早着側の双方を含む全体の損失度合い(図18(a)に示す領域D1,D2の総面積参照)も、経路Bについて得られる遅着側および早着側の双方を含む全体の損失度合い(図18(b)に示す領域D1,D2の総面積参照)よりも小さくなる。従って、早着した場合よりも遅刻した場合に「損失した」と感じる傾向が大きいユーザ、或いは、遅刻しても早着しても「損失した」と感じる傾向が大きいユーザにとっても、上記の経路Aは、経路Bよりも適した経路であると判断できる。
【0046】
以上に説明したように本実施形態によれば、ナビゲーション装置2の制御装置4は、情報センタ3の制御装置16によって到着予想時刻E1(目的地までの所要時間)が相対的に短い経路Aがユーザの価値観に適合した経路であると判断されるように、価値観情報を変化させる。これにより、目的地に早く到着することができる経路を、ユーザの価値観に適合した経路として優先的に選択することができる。
【0047】
(その他の実施形態)
本発明は、上述した各実施形態にのみ限定されるものではなく、例えば次のように変形または拡張することができる。
情報センタ3の制御装置16は、探索した複数の経路のうちの1つを最適経路として設定して経路情報として送信するのではなく、探索した複数の経路と各経路について算出した損失度合いとを含む情報を経路情報として送信する構成としてもよい。この場合、ナビゲーション装置2の制御装置4は、受信した経路情報に基づいて複数の経路と各経路の損失度合いとを対応付けて表示器7の画面に表示し、ユーザが何れかの経路を選択できる構成とするとよい。
情報センタ3の制御装置16が備える上述の経路探索機能(本発明に係る機能)をナビゲーション装置2の制御装置4に備えた構成、つまり、ナビゲーション装置2を本発明の経路探索装置としたスタンドアロン構成としてもよい。
価値観情報を構成する価値観線V1,V2は、直線状でなくてもよく、例えば曲線状に設定してもよい。
ナビゲーション装置2の制御装置4は、経路探索リクエスト情報に自車両(車体)に関するデータ(車両の種類、排気量、走行性能などを示すデータ)を含むように構成してもよい。そして、この自車両に関するデータも経路探索処理に反映させるようにするとよい。
【符号の説明】
【0048】
図面中、3は情報センタ(経路探索装置)、4は制御装置(希望到着時刻設定手段、移動目的設定手段、価値観情報変化手段)、16は制御装置(経路探索手段、変動情報設定手段、価値観情報設定手段、適合度判断手段)を示す。
【特許請求の範囲】
【請求項1】
目的地までの経路を探索する経路探索手段と、
前記経路探索手段によって探索された前記経路を車両が走行した場合に、当該車両が前記目的地に到着するまでに要する所要時間の変動量を示す情報を変動情報として設定する変動情報設定手段と、
前記所要時間の変動量に対するユーザの価値観を示す情報を価値観情報として設定する価値観情報設定手段と、
前記変動情報設定手段によって設定された前記変動情報と、前記価値観情報設定手段によって設定された前記価値観情報とに基づいて、前記経路探索手段によって探索された前記経路がユーザの価値観に適合した経路であるか否かを判断する適合度判断手段と、
を備えることを特徴とする経路探索装置。
【請求項2】
前記適合度判断手段は、前記変動情報と前記価値観情報とに基づいて、前記所要時間が変動することに対してユーザが損失と感じる度合いを面積で示す情報を損失密度情報として算出し、この損失密度情報の面積の大きさに基づいて、前記経路探索手段によって探索された前記経路がユーザの価値観に適合した経路であるか否かを判断することを特徴とする請求項1記載の経路探索装置。
【請求項3】
ユーザが希望する前記目的地への到着時刻を希望到着時刻として設定する希望到着時刻設定手段と、
前記目的地への移動目的を設定する移動目的設定手段と、
前記希望到着時刻設定手段によって設定された前記希望到着時刻および前記移動目的設定手段によって設定された前記移動目的の少なくとも何れか一方に基づいて、前記価値観情報を変化させる価値観情報変化手段と、
をさらに備えることを特徴とする請求項1または2に記載の経路探索装置。
【請求項4】
前記価値観情報変化手段は、前記適合度判断手段によって前記所要時間が相対的に短い前記経路がユーザの価値観に適合した経路であると判断されるように、前記価値観情報を変化させることを特徴とする請求項3記載の経路探索装置。
【請求項1】
目的地までの経路を探索する経路探索手段と、
前記経路探索手段によって探索された前記経路を車両が走行した場合に、当該車両が前記目的地に到着するまでに要する所要時間の変動量を示す情報を変動情報として設定する変動情報設定手段と、
前記所要時間の変動量に対するユーザの価値観を示す情報を価値観情報として設定する価値観情報設定手段と、
前記変動情報設定手段によって設定された前記変動情報と、前記価値観情報設定手段によって設定された前記価値観情報とに基づいて、前記経路探索手段によって探索された前記経路がユーザの価値観に適合した経路であるか否かを判断する適合度判断手段と、
を備えることを特徴とする経路探索装置。
【請求項2】
前記適合度判断手段は、前記変動情報と前記価値観情報とに基づいて、前記所要時間が変動することに対してユーザが損失と感じる度合いを面積で示す情報を損失密度情報として算出し、この損失密度情報の面積の大きさに基づいて、前記経路探索手段によって探索された前記経路がユーザの価値観に適合した経路であるか否かを判断することを特徴とする請求項1記載の経路探索装置。
【請求項3】
ユーザが希望する前記目的地への到着時刻を希望到着時刻として設定する希望到着時刻設定手段と、
前記目的地への移動目的を設定する移動目的設定手段と、
前記希望到着時刻設定手段によって設定された前記希望到着時刻および前記移動目的設定手段によって設定された前記移動目的の少なくとも何れか一方に基づいて、前記価値観情報を変化させる価値観情報変化手段と、
をさらに備えることを特徴とする請求項1または2に記載の経路探索装置。
【請求項4】
前記価値観情報変化手段は、前記適合度判断手段によって前記所要時間が相対的に短い前記経路がユーザの価値観に適合した経路であると判断されるように、前記価値観情報を変化させることを特徴とする請求項3記載の経路探索装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−47682(P2012−47682A)
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願番号】特願2010−192158(P2010−192158)
【出願日】平成22年8月30日(2010.8.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年3月8日(2012.3.8)
【国際特許分類】
【出願日】平成22年8月30日(2010.8.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]