
経路案内システム
【課題】 視線を移動することなく、目的地へ向かう経路に関する情報を取得することができる経路案内システムを提供すること。
【解決手段】 実在しない仮想先行車両が経路を先行して走行するように自車両の乗員から視認できる仮想先行車両の画像を生成し、この生成した仮想先行車両の画像を自車両のフロントウィンドウに設けられたウィンドシールドディスプレイに表示することによって経路を案内する。
【解決手段】 実在しない仮想先行車両が経路を先行して走行するように自車両の乗員から視認できる仮想先行車両の画像を生成し、この生成した仮想先行車両の画像を自車両のフロントウィンドウに設けられたウィンドシールドディスプレイに表示することによって経路を案内する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路案内システムに関するものである。
【背景技術】
【0002】
従来、実際には存在しない仮想の先行車両を自車両のフロントガラスに表示する車両用表示装置が提案されている(例えば、特許文献1参照。)。この特許文献1に開示されている車両用表示装置では、仮想先行車両が自車両の所定時間後の走行状態を表すように、仮想先行車両の走行状態を変更する。
【特許文献1】特開2002−144913号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した、従来の車両用表示装置は、運転者の視線を移動させることなく、自車両前方の障害物やカーブといった自車両前方に関する情報を運転者に伝えることができるが、運転者の希望する目的地へ向かう経路に関する情報については伝えることができない。
【0004】
本発明は、上記の問題を鑑みてなされたもので、視線を移動することなく、目的地へ向かう経路に関する情報を取得することができる経路案内システムを提供する。
【課題を解決するための手段】
【0005】
上記目的を達成するためになされた請求項1に記載の経路案内システムは、
目的地へ向かう経路を計算する経路計算手段と、
実在しない仮想先行車両が経路を先行して走行するように自車両の乗員から視認できる仮想先行車両の画像を生成する仮想画像生成手段と、
自車両のフロントウィンドウに表示領域が設けられ、該表示領域に表示された画像を自車両の前方の風景と重ねて視認可能なウィンドシールドディスプレイと、
仮想画像生成手段の生成した仮想先行車両の画像を表示領域に表示することによって経路を案内する経路案内手段と、を備えることを特徴とする。
【0006】
これにより、自車両の乗員は、視線を移動することなく、仮想先行車両の画像から目的地へ向かう経路に関する情報を直接的に取得することができる。その結果、自車両の乗員は、仮想先行車両に追従して走行するように運転操作を行うことで、目的地へ向かうことができる。
【0007】
請求項2に記載の経路案内システムは、自車両の前方の経路における道路状況、又は/及び交通状況に関する道路交通情報を取得する道路交通情報取得手段を備え、
仮想画像生成手段は、経路、又は/及び道路交通情報取得手段の取得した情報に応じて仮想先行車両の走行状態を変更する走行状態変更手段を備えることを特徴とする。
【0008】
これにより、経路に応じて仮想先行車両の走行状態を変更するとともに、制限速度、信号機の点灯状態、交通規則等の道路状況や、工事や通行止め等の通行規制、自車両の周囲に存在する他車両等の交通状況に応じて仮想先行車両の走行状態を変更することができる。
【0009】
請求項3に記載の経路案内システムによれば、走行状態変更手段は、自車両が車線変更、又は右左折する必要がある場合、仮想先行車両のウィンカを点滅させることを特徴とする。これにより、例えば、一般道路における分岐地点、合流地点、工事中の場所や、高速道路におけるランプ、料金所、パーキングエリア(PA)、サービスエリア(SA)付近の分岐地点や合流地点等、自車両が車線変更する必要がある場合に仮想先行車両のウィンカを点滅させることができる。また、交差点等で自車両が右左折する必要がある場合にも仮想先行車両のウィンカを点滅させることができる。その結果、自車両の乗員は、仮想先行車両の画像から車線変更、又は右左折する必要があることを把握することができる。
【0010】
請求項4に記載の経路案内システムによれば、走行状態変更手段は、自車両が減速、又は停止する必要がある場合、仮想先行車両のブレーキランプを点灯させることを特徴とする。
【0011】
これにより、一般道路における分岐地点、合流地点、交差点、工事中の場所、道幅の狭い道路、目的地の周辺、制限速度の変更地点や、高速道路におけるランプ、料金所、パーキングエリア(PA)、サービスエリア(SA)付近の分岐地点や合流地点等、自車両が減速したり停止したりする必要がある場合に仮想先行車両のブレーキランプを点灯させることができる。その結果、自車両の乗員は、仮想先行車両の画像から減速や停止をする必要があることを把握することができる。
【0012】
請求項5に記載の経路案内システムによれば、走行状態変更手段は、自車両が減速する必要がある場合、仮想先行車両との車間距離を短くすることを特徴とする。これにより、自車両が交差点で右左折する場合や、経路上の制限速度が変更する場合、或いは、目的地に近づいた場合等、自車両が減速する必要がある場合に仮想先行車両との車間距離を短くすることができる。その結果、自車両の乗員は、仮想先行車両の画像から減速する必要があることを把握することができる。
【0013】
請求項6に記載の経路案内システムによれば、走行状態変更手段は、自車両が停止する必要がある場合、その停止すべき地点で仮想先行車両を停止させることを特徴とする。これにより、自車両の乗員は、仮想先行車両の画像から停止する必要があることを把握することができる。
【0014】
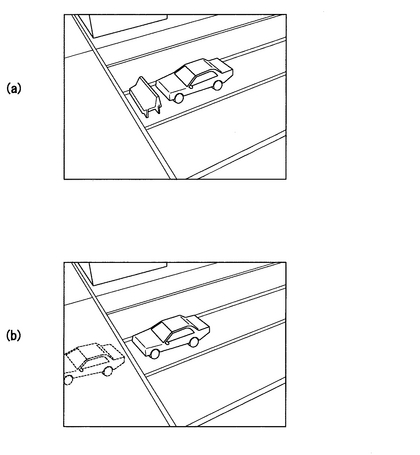
なお、例えば、交差点等において自車両が先頭で停車する場合、仮想先行車両の存在により、交差点での停車位置が停止線から後方となることが考えられる。そのため、例えば、図9(a)に示すように、仮想先行車両の長さを縮めたり、あるいは、図9(b)に示すように、仮想先行車両の画像の光透過度を高くしたりして、自車両の停車位置を停止線に近づけるようにすることが好ましい。また、自車両の前方に先行車両が存在する場合には、仮想先行車両の画像を完全に透明にするようにしてもよい。
【0015】
請求項7に記載の経路案内システムによれば、走行状態変更手段は、自車両が停止した後に発進可能となった場合、仮想先行車両を発進させることを特徴とする。これにより、自車両の乗員は、仮想先行車両の画像から発進可能であることを把握することができる。
【0016】
請求項8に記載の経路案内システムによれば、走行状態変更手段は、経路にトンネルが含まれる場合、そのトンネルの入口又は出口付近において仮想先行車両のテールランプを点灯又は消灯させることを特徴とする。これにより、自車両の乗員は、仮想先行車両の画像からヘッドライトを点灯又は消灯する必要があることを把握することができる。
【0017】
請求項9に記載の経路案内システムによれば、自車両の前方に存在する他車両を検出する他車両検出手段を備え、仮想画像生成手段は、他車両検出手段が他車両を検出した場合、表示領域において他車両と仮想先行車両の画像とが重なる部分について、仮想先行車両の光透過度を高くした画像を生成することを特徴とする。これにより、自車両の乗員から実在する先行車両や対向車両等の他車両が仮想先行車両の画像に隠れて視認し難くなることを防ぐことができる。
【発明を実施するための最良の形態】
【0018】
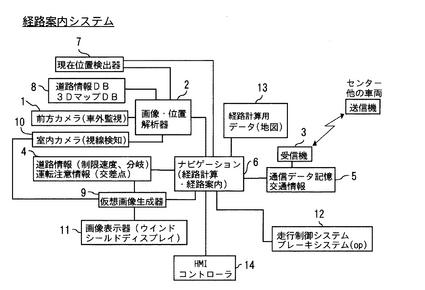
以下、本発明の経路案内システムの実施形態について、図面を参照しながら説明する。図1に、本実施形態の経路案内システムの全体構成を示す。同図に示すように、経路案内システムは、前方カメラ1、画像・位置解析器2、受信機3、道路情報・運転注意情報記憶装置4、交通情報記憶装置5、ナビゲーション装置6、現在位置検出器7を備える。さらに、経路案内システムは、道路情報・3DマップDB8、仮想画像生成器9、室内カメラ10、画像表示器11、走行制御システム12、経路計算用データ格納器13、及びHMIコントローラ14を備える。
【0019】
前方カメラ1は、自車両の前方を撮影する前方撮影用カメラである。この前方カメラ1で撮影された画像は、画像・位置解析器2に出力される。室内カメラ10は、自車両の運転者の視線を検出するために用いられるもので、室内カメラ10撮影した画像は、画像・位置解析器2に出力される。
【0020】
受信機3は、外部のセンタや他車両からの交通情報や先行車両情報等を受信する。この受信した情報は、交通情報記憶装置5に一時的に記憶されるとともに、道路情報・運転注意情報記憶装置4に転送される。
【0021】
道路情報・運転注意情報記憶装置4は、道路の制限速度、道路の分岐・合流・交差の状況等の道路情報や、交差点での一旦停止、徐行等の運転者が注意すべき地点(運転注意地点)の情報を示す運転者注意情報が記憶されている。これらの情報は、その対象となる位置を示す座標データが関連付けられている。
【0022】
交通情報記憶装置5は、受信機3の受信した交通情報等や自車両から送信する情報を一時的に記憶する記憶装置である。なお、ナビゲーション装置6の経路計算において用いられる情報が含まれる場合、その情報はナビゲーション装置6において用いられる。
【0023】
ナビゲーション装置6は、経路計算用データ格納器13に格納される地図データを用いて、目的地へ向かう経路を計算する経路計算機能と、この経路計算機能の計算した経路を案内する経路案内機能を備えている。
【0024】
現在位置検出器7は、自車両の現在位置と進行方向を測定するために用いる計測器であり、例えば、高精度測位が行えるRTKGPS(Real-time kinematic Global Positioning System)等が用いられる。このように、RTKGPSを用いることで、数センチメートル単位での測位が行えるため、自車両の走行速度も高精度で求めることができる。なお、RTKGPSを用いることができない場合、例えば、車速パルス等から車速を検出するようにしてもよい。
【0025】
道路情報・3DマップDB8は、道路の情報(道路の形状、サイズ、位置等)と建造物(例えば、建物、ガードレール、電柱、標識、信号機、樹木等)の情報(建造物の形状、サイズ、位置、方向等)の情報が記憶されている。これらの情報は、受信機3を介して外部から受信した情報によって追加できる構成になっている。
【0026】
画像・位置解析器2は、画像情報解析部と位置情報解析部とにより構成される。画像情報解析部は、前方カメラ1の撮影した画像を解析して、自車両の前方に存在する先行車両や対向車両等を検出する。画像情報解析部では、先行車両や対向車両が検出される場合には、先行車両や対向車両のおおよその車間距離と幅方向位置を先行車両や対向車両の画像サイズと画像上の位置から特定する。
【0027】
ここで、前方カメラ1の撮影した画像は、自車両の進行方向に対して補正をかけている。すなわち、自車両の走行する道路に対する角度と前方カメラ1の設置位置を考慮したうえで、前方カメラ1が撮影した画像から、先行車両や対向車両が道路のどの位置(幅方向位置)をどのような速度で走行しているかを先行車両や対向車両の画像のピクセルから特定する。
【0028】
なお、上述したように、画像解析により先行車両や対向車両のおおよその車間距離と幅方向位置を特定しているが、これに限らず、例えば、ミリ波等の電波やレーザ光等の光を用いたレーダによる先行車両や対向車両の検出結果を組み合わせて、先行車両や対向車両の有無や先行車両や対向車両との相対関係(車間距離、幅方向位置、相対速度等)を検出するようにしてもよい。
【0029】
また、画像情報解析部は、先行車両や対向車両の他車両が検出されない場合は、他車両が存在しない旨の情報を位置情報解析部に送る。先行車両や対向車両が検出された場合は、先行車両や対向車両との相対関係(車間距離、幅方向位置、相対速度等)を示す情報を位置情報解析部に送る。さらに、画像情報解析部は、室内カメラ10の撮影した運転者の顔画像から、運転者の視線位置(どの方向のどの距離に視点をおいている)を測定する。画像情報解析部は、この測定結果である視線位置情報を仮想画像生成器9へ出力する。
【0030】
一方、位置情報解析部は、道路情報・運転注意情報記憶装置4の記憶する運転者注意情報と、現在位置検出器7で測定された現在位置から、運転注意地点が近づいているかを判定する。そして、自車両の前方に運転注意地点が近づいている場合、その地点までの距離を道路情報・運転注意情報記憶装置4に記憶された道路情報を用いて計算する。
【0031】
仮想画像生成器9は、実在しない仮想先行車両の画像を生成するもので、画像表示器11の表示領域に仮想先行車両の画像を表示する際、仮想先行車両の位置や大きさをパラメータとして入力し、運転者の運転状況、視線位置に基づく標準視野(統計的に安全運転をする場合に必要な視野範囲)に応じて、仮想先行車両の画像が画像表示器11の表示領域においてどのように表示されるかを計算する。そして、この計算結果に基づく仮想先行車両の画像を画像表示器11の表示領域に表示するための制御を行う。
【0032】
また、仮想画像生成器9は、目的地へ向かう経路、及び道路情報や交通情報に応じて仮想先行車両の走行状態を変更する。これにより、経路に応じて仮想先行車両の走行状態を変更するとともに、制限速度、信号機の点灯状態、交通規則等の道路状況や、工事や通行止め等の通行規制、自車両の周囲に存在する他車両等の交通状況に応じて仮想先行車両の走行状態を変更することができる。
【0033】
さらに、仮想画像生成器9は、運転者の視点が上述した標準視野から逸脱したときは、仮想先行車両の画像の表示を標準視野逸脱地点で留めるようにする。そして、運転者の視点が再び標準視野に戻ったとき、再び視点に応じた仮想先行車両の画像の表示を行う。このようにすることで、運転者の視線の変更に伴って仮想先行車両の画像の表示位置を計算する必要がなくなるため(標準視野だけの仮想先行車両の画像の表示位置を計算するのみとなるため)、仮想画像生成器9の処理の負荷を軽減することができる。
【0034】
画像表示器11は、その表示領域が自車両のフロントウィンドウに設けられたウィンドシールドディスプレイである。自車両の運転者は、このウィンドシールドディスプレイに表示された画像を自車両の前方の風景と重ねて視認することができる。
【0035】
走行制御システム12は、自車両の駆動系を制御するシステムである。この走行制御システム12を用いて、例えば、上述した運転注意地点に近づくと自動的に自車両を減速するようにしてもよい。具体的には、仮想先行車両に自車両が衝突するような状況になった場合に、仮想先行車両に衝突しないように自動的に走行制御を行うようにしてもよい。
【0036】
また、画像・位置解析器2にて移動物体の検出を行い、移動物体の有無を仮想画像生成器9へ出力してウィンドシールドディスプレイに表示するようにしても良い。この場合、表示の位置は、運転の支障とならない位置(運転者の視野の上下、あるいは右ハンドル車であれば、右下側のサイドミラーの左等)であるとよい。表示タイミングについては、運転の支障にならないタイミング(例えば、先行車両が存在しない場合や信号待ちで停止している場合など)とすればよい。
【0037】
なお、自車両が交差点等で右左折する場合には、自車両の死角となる領域を監視できるように配置した周辺監視カメラ(図示せず)の画像を仮想先行車両の画像の近辺に表示する。これにより、自車両の運転者は、より安全な右左折が可能となる。
【0038】
また、ナビゲーション装置によって指定されたコマンドを運転者が音声入力や操作スイッチによる入力操作で選択した場合、そのコマンドに対応する表示を運転の妨げにならない位置に表示させるようにする。コマンドに対する音声入力やスイッチ操作は、HMIコントローラ14により制御される。なお、表示された画像の光透過度は、表示開始時は設定値以上の光透過度を持つようにする。
【0039】
本実施形態の経路案内システムは、ナビゲーション装置6の経路案内機能として、実在しない仮想先行車両が経路を先行して走行するように自車両の乗員から視認できる仮想先行車両の画像を生成し、この生成した仮想先行車両の画像を自車両のフロントウィンドウに設けられたウィンドシールドディスプレイに表示することによって経路を案内する。
【0040】
これにより、自車両の乗員は、視線を移動することなく、仮想先行車両の画像から目的地へ向かう経路に関する情報を直接的に取得することができる。その結果、自車両の乗員は、仮想先行車両に追従して走行するように運転操作を行うことで、目的地へ向かうことができる。
【0041】
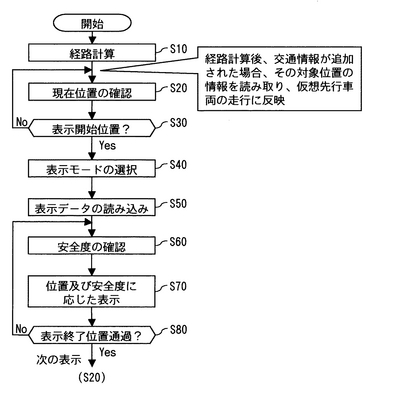
次に、本経路案内システムにおける経路案内機能の表示処理について、図2に示すフローチャートを用いて説明する。先ず、図2に示すステップ(以下、Sと記す)10では、目的地へ向かう経路を計算する。この経路計算では、予めどの地点(例えば、分岐地点、合流地点、交差点等)において、どのような案内を行うかを決定しておき、この決定した経路案内情報を記憶する。
【0042】
なお、仮に経路案内中に自車両が経路から外れた場合は、従来のナビゲーション装置と同じように再度、経路計算を行うものとする。また、経路計算後、外部のセンタ等から交通情報を得た場合、表示開始位置が付け加えるようにする。例えば、経路上の工事中の地点に接近した場合、注意を促す表示を仮想先行車両の画像を用いて行う。
【0043】
S20では、自車両の現在位置を検出し、S30では、表示開始位置に到着したか否かを判定する。ここで、肯定判定される場合にはS40へ処理を進め、否定判定される場合にはS20へ処理を移行する。S40では、この表示開始位置における表示モード(分岐モード、合流モード、右折モード、左折モード等)を経路案内情報に基づいて選択し、S50では、表示データを含む案内すべき内容を経路案内情報から読み出し、この読み出した経路案内情報に応じて、仮想先行車両の走行状態を変更する。
【0044】
例えば、自車両が右折すべき交差点に接近した場合には、表示モードは右折モード(交差点までの距離と自車両の車速に応じて、右折のための車線変更、徐行等の指示を出す表示)となる。
【0045】
S60では、自車両の走行上の安全度合いを確認(判定)し、S70では、この安全度合いに応じた表示を行う。例えば、上述した交通情報や周辺監視カメラの画像等から右側後方から接近する後続車両が確認された場合、車線変更を行うと危険であるか否かの安全度合いを判定し、安全度が低い(危険である)と判定された場合には、車線変更を安全に行うことができる状態になるまで、経路の方向を示しながら直進を続ける等の処理を行う。
【0046】
S80では、表示終了位置を通過したか否かを判定する。ここで、肯定判定される場合にはS20へ処理を移行し、上述した処理を繰り返し行う。一方、否定判定される場合にはS60へ処理を移行し、上述した処理を繰り返す。
【0047】
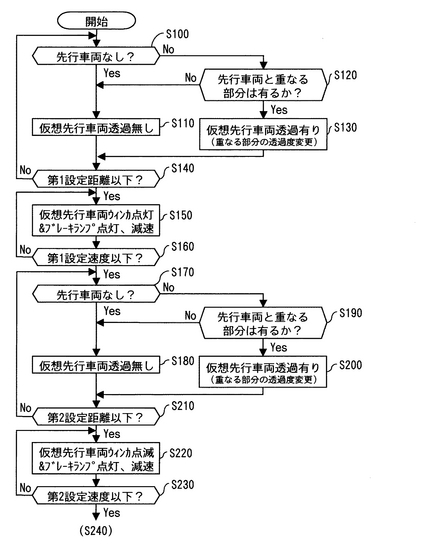
続いて、本経路案内システムの動作について具体例を示して説明する。先ず、自車両が交差点にて左折する場合におけるシステム動作フローについて、図3及び図4に示すフローチャートを用いて説明する。先ず、S100では、画像・位置解析器2において先行車両が存在しないか否かを判定する。ここで、肯定判定される場合にはS110へ処理を進め、否定判定される場合にはS120へ処理を進める。
【0048】
S110では、目的地へ向かう経路を先行して走行する仮想先行車両の画像を表示する。なお、仮想先行車両は、運転者が仮想的な車両であることが容易に把握できるように単一色等で表示する。また、特に仮想先行車両の画像は、車両の形状を示すものでなくともよい(例えば、人物、マスコット、飛行機等。)。
【0049】
S120では、実在する先行車両の位置を判定するとともに、ウィンドシールドディスプレイ上において、実在する先行車両と仮想先行車両とが重なる部分があるか否かを判定する。ここで、肯定判定される場合にはS130へ処理を進め、否定判定される場合にはS110へ処理を移行する。
【0050】
S130では、実在する先行車両と仮想先行車両とが重なる部分を算出して、その重なる部分の仮想先行車両の光透過度を高くして、実在する先行車両が自車両の運転者から見えるようにする。これにより、自車両の乗員から実在する先行車両や対向車両等の他車両が仮想先行車両の画像に隠れて視認し難くなることを防ぐことができる。
【0051】
また、重なる部分の周辺の光透過度については、完全に重なる部分に比べて若干光透過度を低くした段階的な光透過度を用いて、実在する先行車両の周辺が見えるようにする。このようにすると、自車両に揺れが生じたり、自車両の乗員の視線が移動したりしたとしても、仮想先行車両の画像により実在する先行車両が見え難くならないようにすることができる。
【0052】
S140では、仮想先行車両が経路を走行し始めると、自車両から、例えば、左折すべき交差点までの距離が第1設定距離(例えば300m)以下となったか否かを判定する。ここで、肯定判定される場合にはS150へ処理を進め、否定判定される場合にはS100へ処理を移行する。
【0053】
S150では、仮想先行車両のウィンカを点滅させるとともに、自車両の車速を減速させるため、仮想先行車両のブレーキランプを点灯させ、さらに、仮想先行車両との車間距離を短くする。
【0054】
これにより、自車両が車線変更したり右左折したりする必要がある場合に仮想先行車両のウィンカを点滅させることができる。その結果、自車両の乗員は、仮想先行車両の画像から車線変更、又は右左折する必要があることを把握することができる。また、自車両が減速したり停止したりする必要がある場合に仮想先行車両のブレーキランプを点灯させつつ、仮想先行車両との車間距離を短くすることができる。その結果、自車両の乗員は、仮想先行車両の画像から減速や停止をする必要があることを把握することができる。
【0055】
なお、運転者が仮想先行車両の接近に気づかない場合、運転者の意識が低いと判定し、警報を出すようにしてもよい。これにより、運転者の注意レベル(認知・判断)が判定できる。
【0056】
S160では、車速パルス等により車速を検出し、自車両の速度が第1設定速度(例えば30km/h)以下まで減速したか否かを判定する。ここで、肯定判定される場合にはS170へ処理を進め、否定判定される場合にはS150の処理を繰り返し行う。
【0057】
S170では、先行車両が存在しないか否かを判定する。ここで、肯定判定される場合にはS180へ処理を進め、否定判定される場合にはS190へ処理を進める。S180では、目的地へ向かう経路を先行して走行する仮想先行車両の画像を表示する。S190では、実在する先行車両の位置を判定するとともに、その位置が仮想先行車両と重なる位置にあるかを判定する。ここで、肯定判定される場合にはS200へ処理を進め、否定判定される場合にはS180へ処理を移行する。
【0058】
S200では、実在する先行車両と仮想先行車両とが重なる部分を算出して、重なる部分の光透過度を高くして、実在する先行車両が自車両の運転者から見えるようにする。S210では、自車両から、例えば、左折すべき交差点までの距離が第2設定距離(例えば100m)以下となったか否かを判定する。ここで、肯定判定される場合にはS220へ処理を進め、否定判定される場合にはS170へ処理を移行する。
【0059】
S220では、表示すべき仮想先行車両の画像として、仮想先行車両のウィンカを点滅させるとともに、自車両の車速を第2設定速度(例えば10km/h)まで減速させるために、ブレーキランプを点灯させ、さらに、仮想先行車両との車間距離を短くする。
【0060】
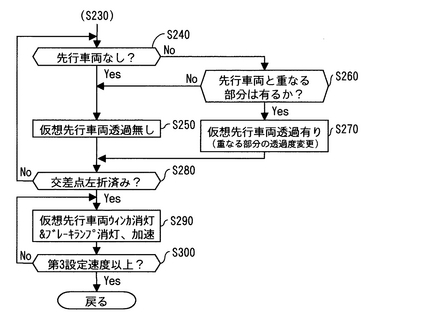
S230では、車速パルス等により車速を検出し、自車両の速度が第2設定速度以下まで減速したか否かを判定する。ここで、肯定判定される場合にはS240へ処理を進め、否定判定される場合にはS220の処理を繰り返し行う。
【0061】
S240では、再び、先行車両が存在しないか否かを判定する。ここで、肯定判定される場合にはS250へ処理を進め、否定判定される場合にはS260へ処理を進める。S250では、目的地へ向かう経路を先行して走行する仮想先行車両の画像を表示する。S260では、実在する先行車両の位置を判定するとともに、その位置が仮想先行車両と重なる位置にあるかを判定する。ここで、肯定判定される場合にはS270へ処理を進め、否定判定される場合にはS250へ処理を移行する。
【0062】
S270では、実在する先行車両と仮想先行車両とが重なる部分を算出して、重なる部分の光透過度を高くして、実在する先行車両が自車両の運転者から見えるようにする。S280では、自車両が左折を済ませたか否かを判定する。ここで、肯定判定される場合にはS290へ処理を進め、否定判定される場合にはS240へ処理を移行し、上述した処理を繰り返し行う。
【0063】
S290では、仮想先行車両のウィンカ及びブレーキランプを消灯させるとともに、仮想先行車両との車間距離を長くする(仮想先行車両が加速する)。S300では、車速パルス等により、自車両の速度が第3設定速度以上(例えば、60km/h)まで加速したか否かを判定する。ここで、肯定判定される場合には本処理を終了し、否定判定される場合にはS290の処理を繰り返し行う。
【0064】
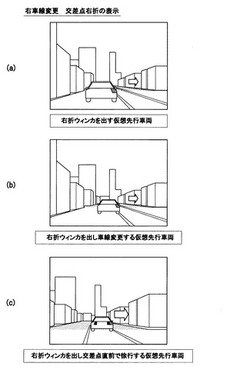
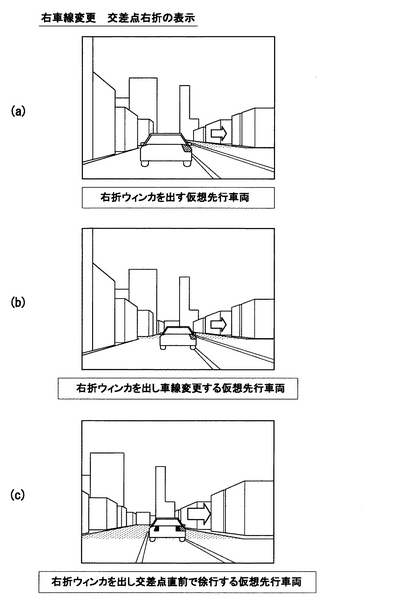
次に、仮想先行車両の表示イメージを示す。図5及び図6は、右車線から右折レーンに入り、交差点で右折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【0065】
図5(a)に示すように、自車両が右折すべき交差点に接近すると、右折対象の交差点の位置が矢印で表示されるとともに、右車線へ車線変更するために仮想先行車両のウィンカを点滅させる。自車両の運転者は、この仮想先行車両のウィンカの点滅が開始されたのを見て、自車両のウィンカを操作する。
【0066】
図5(b)に示すように、自車両が右折すべき交差点に接近するに従って、仮想先行車両の幅方向位置を徐々に右折レーンに移動させる。図5(c)に示すように、仮想先行車両が右折すべき交差点に近づくと、仮想先行車両の画像の光透過度を高くして、運転者が対向車両の存在を把握できるようにする。また、交差点直前で徐行が必要な場合には、仮想先行車両のブレーキランプを点灯させる。
【0067】
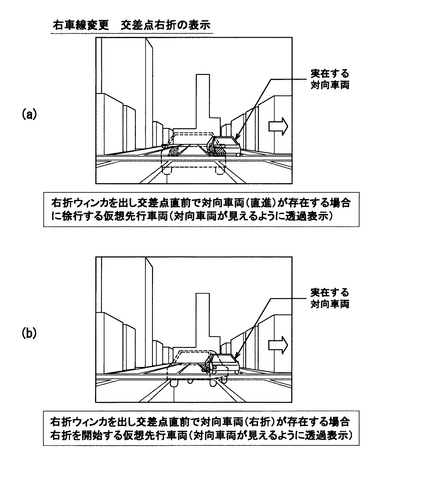
図6(a)に示すように、直進する対向車両が実在する場合、仮想先行車両のブレーキランプを点灯させる。一方、図6(b)に示すように、実在する対向車両の右ウィンカの点滅と徐行や停止が確認された場合、すなわち、右折する対向車両が実在する場合、仮想先行車両を発進させて右折を開始する。このように、自車両が停止した後に発進可能となった場合、仮想先行車両を発進させることで、自車両の乗員は、仮想先行車両の画像から発進可能であることを把握することができる。
【0068】
なお、横断歩道を横断する歩行者や自動二輪車の対向車両が検知された場合、仮想先行車両は交差点で停止する。このように、自車両が停止する必要がある場合、その停止すべき地点で仮想先行車両を停止させる。これにより、自車両の乗員は、仮想先行車両の画像から停止すべき地点を把握することができる。
【0069】
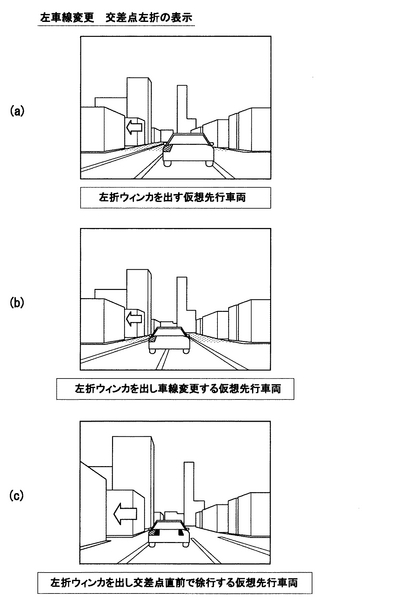
図7(a)〜(c)は、左車線へ移動して交差点で左折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。図7(a)に示すように、自車両が左折すべき交差点に接近すると、左折対象の交差点の位置が矢印で表示されるとともに、左車線へ車線変更するために仮想先行車両のウィンカを点滅させる。
【0070】
そして、図7(b)に示すように、自車両が左折すべき交差点に接近するに従って、仮想先行車両の幅方向位置を徐々に左車線に移動させる。運転者は、この仮想先行車両の画像を見て、自車両のウィンカを操作するとともに、ハンドルを操作して左車線に移動する。
【0071】
この車線変更をする際、左側後方から接近する後続車両が周辺監視カメラの画像等から確認されている場合、仮想先行車両は、左車線への車線変更を遅らせる(ウィンカは点滅させても幅方向位置は変更しない)ようにし、安全が確認されてから左車線への車線変更を開始するようにする。
【0072】
また、自車両が予め左折レーン内に位置しない場合には、例えば、交差点までの距離が設定距離4(例えば500mm)以下となった場合に、仮想先行車両のウィンカを点滅させ、周辺監視カメラの画像をウィンドシールドディスプレイに表示するとよい。
【0073】
さらに、周辺監視カメラの画像を画像・位置解析器2にて動体検出処理し、この処理の検出結果から、自車両の左レーンに後続車両が存在しない、或いは、後続車両との車間距離が長いと判断できる場合には、仮想先行車両を左折レーンに車線変更させる。これにより、運転者が直接視認できない領域についても安全を確認し、左折することができるようになる。なお、動体検出処理は、画像のフレーム間の差分検出にて得られた物体の大きさにより行えばよい。
【0074】
図7(c)に示すように、仮想先行車両が左折すべき交差点に近づくと、仮想先行車両の画像の光透過度を高くして、運転者が歩行者等の存在を把握できるようにする。また、交差点直前で徐行が必要な場合には、仮想先行車両のブレーキランプを点灯させる。そして、左折時には、横断中の歩行者や自車両の左側死角に小型車両が存在しないことが確認された場合、仮想先行車両は左折を開始する。
【0075】
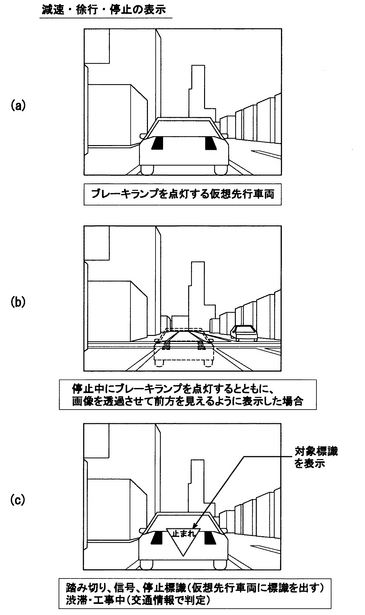
図8は、減速、徐行、停止する場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。図8(a)に示すように、自車両が停止や徐行する必要があることを運転者に知らせるために、仮想先行車両のブレーキランプを点灯させる。また、図8(b)に示すように、停車中である場合には、自車両の運転者から前方の風景が見えるように、仮想先行車両の画像の光透過度を高くする。
【0076】
さらに、図8(c)に示すように、踏切、信号機、停止標識、渋滞、工事中等の情報が外部のセンタ等から取得した場合、その停止原因を示す標識やマークを仮想先行車両に重畳表示するようにしてもよい。また、必要に応じて、渋滞等の詳細な情報(渋滞時間、渋滞距離、通過時間)を示すマークや文字を仮想先行車両に重畳表示するようにしてもよい。これにより、運転者は、仮想先行車両が停止・徐行した原因を視線を移動することなく把握することができる。
【0077】
(変形例1)
例えば、交差点等において自車両が先頭で停車する場合、仮想先行車両の存在により、交差点での停車位置が停止線から後方となることが考えられる。そのため、例えば、図9(a)に示すように、仮想先行車両の長さを縮めたり、あるいは、図9(b)に示すように、仮想先行車両の画像の光透過度を高くしたりして、自車両の停車位置を停止線に近づけるようにすることが好ましい。また、自車両の前方に先行車両が存在する場合には、仮想先行車両の画像を完全に透明にするようにしてもよい。
【0078】
(変形例2)
例えば、経路にトンネルが含まれる場合、そのトンネルの入口又は出口付近において仮想先行車両のテールランプを点灯又は消灯させるようにしてもよい。これにより、自車両の乗員は、仮想先行車両の画像からヘッドライトを点灯又は消灯する必要があることを把握することができる。
【0079】
(変形例3)
例えば、仮想先行車両のブレーキランプを点灯させても運転者が減速操作を行わない場合、運転者がブレーキランプの点灯を見逃したと判断して、自動的に自車両の車速を減速するようにしても良い。さらに、左折地点までの距離が第2設定距離以下となった場合、自車両が左折を完了するまで、他車両の巻込み防止のために周辺監視カメラの画像を画像表示器11の表示領域に表示するようにしても良い。
【図面の簡単な説明】
【0080】
【図1】本実施形態の経路案内システムの全体構成を示すブロック図である。
【図2】経路案内システムにおける経路案内機能の表示処理の流れを示すフローチャートである。
【図3】自車両が交差点にて右左折する場合における本経路案内システムの動作フローの前半部分を示したフローチャートである。
【図4】自車両が交差点にて右左折する場合における本経路案内システムの動作フローの後半部分を示したフローチャートである。
【図5】(a)〜(c)は、右側車線から右折レーンに入り、交差点で右折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図6】(a)、(b)は、交差点で右折する際に対向車両が存在する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図7】(a)〜(c)は、左側車線へ移動し、交差点で左折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図8】(a)〜(c)は、自車両が減速、徐行、停止する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図9】(a)、(b)は、変形例1における仮想先行車両の表示例を示した図である。
【符号の説明】
【0081】
1 前方カメラ
2 画像・位置解析器
3 受信機
4 道路情報・運転注意情報記憶装置
5 交通情報記憶装置
6 ナビゲーション装置
7 現在位置検出器
8 道路情報・3DマップDB
9 仮想画像生成器
10 室内カメラ
11 画像表示器
12 走行制御システム
13 経路計算用データ格納器
14 HMIコントローラ
【技術分野】
【0001】
本発明は、経路案内システムに関するものである。
【背景技術】
【0002】
従来、実際には存在しない仮想の先行車両を自車両のフロントガラスに表示する車両用表示装置が提案されている(例えば、特許文献1参照。)。この特許文献1に開示されている車両用表示装置では、仮想先行車両が自車両の所定時間後の走行状態を表すように、仮想先行車両の走行状態を変更する。
【特許文献1】特開2002−144913号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した、従来の車両用表示装置は、運転者の視線を移動させることなく、自車両前方の障害物やカーブといった自車両前方に関する情報を運転者に伝えることができるが、運転者の希望する目的地へ向かう経路に関する情報については伝えることができない。
【0004】
本発明は、上記の問題を鑑みてなされたもので、視線を移動することなく、目的地へ向かう経路に関する情報を取得することができる経路案内システムを提供する。
【課題を解決するための手段】
【0005】
上記目的を達成するためになされた請求項1に記載の経路案内システムは、
目的地へ向かう経路を計算する経路計算手段と、
実在しない仮想先行車両が経路を先行して走行するように自車両の乗員から視認できる仮想先行車両の画像を生成する仮想画像生成手段と、
自車両のフロントウィンドウに表示領域が設けられ、該表示領域に表示された画像を自車両の前方の風景と重ねて視認可能なウィンドシールドディスプレイと、
仮想画像生成手段の生成した仮想先行車両の画像を表示領域に表示することによって経路を案内する経路案内手段と、を備えることを特徴とする。
【0006】
これにより、自車両の乗員は、視線を移動することなく、仮想先行車両の画像から目的地へ向かう経路に関する情報を直接的に取得することができる。その結果、自車両の乗員は、仮想先行車両に追従して走行するように運転操作を行うことで、目的地へ向かうことができる。
【0007】
請求項2に記載の経路案内システムは、自車両の前方の経路における道路状況、又は/及び交通状況に関する道路交通情報を取得する道路交通情報取得手段を備え、
仮想画像生成手段は、経路、又は/及び道路交通情報取得手段の取得した情報に応じて仮想先行車両の走行状態を変更する走行状態変更手段を備えることを特徴とする。
【0008】
これにより、経路に応じて仮想先行車両の走行状態を変更するとともに、制限速度、信号機の点灯状態、交通規則等の道路状況や、工事や通行止め等の通行規制、自車両の周囲に存在する他車両等の交通状況に応じて仮想先行車両の走行状態を変更することができる。
【0009】
請求項3に記載の経路案内システムによれば、走行状態変更手段は、自車両が車線変更、又は右左折する必要がある場合、仮想先行車両のウィンカを点滅させることを特徴とする。これにより、例えば、一般道路における分岐地点、合流地点、工事中の場所や、高速道路におけるランプ、料金所、パーキングエリア(PA)、サービスエリア(SA)付近の分岐地点や合流地点等、自車両が車線変更する必要がある場合に仮想先行車両のウィンカを点滅させることができる。また、交差点等で自車両が右左折する必要がある場合にも仮想先行車両のウィンカを点滅させることができる。その結果、自車両の乗員は、仮想先行車両の画像から車線変更、又は右左折する必要があることを把握することができる。
【0010】
請求項4に記載の経路案内システムによれば、走行状態変更手段は、自車両が減速、又は停止する必要がある場合、仮想先行車両のブレーキランプを点灯させることを特徴とする。
【0011】
これにより、一般道路における分岐地点、合流地点、交差点、工事中の場所、道幅の狭い道路、目的地の周辺、制限速度の変更地点や、高速道路におけるランプ、料金所、パーキングエリア(PA)、サービスエリア(SA)付近の分岐地点や合流地点等、自車両が減速したり停止したりする必要がある場合に仮想先行車両のブレーキランプを点灯させることができる。その結果、自車両の乗員は、仮想先行車両の画像から減速や停止をする必要があることを把握することができる。
【0012】
請求項5に記載の経路案内システムによれば、走行状態変更手段は、自車両が減速する必要がある場合、仮想先行車両との車間距離を短くすることを特徴とする。これにより、自車両が交差点で右左折する場合や、経路上の制限速度が変更する場合、或いは、目的地に近づいた場合等、自車両が減速する必要がある場合に仮想先行車両との車間距離を短くすることができる。その結果、自車両の乗員は、仮想先行車両の画像から減速する必要があることを把握することができる。
【0013】
請求項6に記載の経路案内システムによれば、走行状態変更手段は、自車両が停止する必要がある場合、その停止すべき地点で仮想先行車両を停止させることを特徴とする。これにより、自車両の乗員は、仮想先行車両の画像から停止する必要があることを把握することができる。
【0014】
なお、例えば、交差点等において自車両が先頭で停車する場合、仮想先行車両の存在により、交差点での停車位置が停止線から後方となることが考えられる。そのため、例えば、図9(a)に示すように、仮想先行車両の長さを縮めたり、あるいは、図9(b)に示すように、仮想先行車両の画像の光透過度を高くしたりして、自車両の停車位置を停止線に近づけるようにすることが好ましい。また、自車両の前方に先行車両が存在する場合には、仮想先行車両の画像を完全に透明にするようにしてもよい。
【0015】
請求項7に記載の経路案内システムによれば、走行状態変更手段は、自車両が停止した後に発進可能となった場合、仮想先行車両を発進させることを特徴とする。これにより、自車両の乗員は、仮想先行車両の画像から発進可能であることを把握することができる。
【0016】
請求項8に記載の経路案内システムによれば、走行状態変更手段は、経路にトンネルが含まれる場合、そのトンネルの入口又は出口付近において仮想先行車両のテールランプを点灯又は消灯させることを特徴とする。これにより、自車両の乗員は、仮想先行車両の画像からヘッドライトを点灯又は消灯する必要があることを把握することができる。
【0017】
請求項9に記載の経路案内システムによれば、自車両の前方に存在する他車両を検出する他車両検出手段を備え、仮想画像生成手段は、他車両検出手段が他車両を検出した場合、表示領域において他車両と仮想先行車両の画像とが重なる部分について、仮想先行車両の光透過度を高くした画像を生成することを特徴とする。これにより、自車両の乗員から実在する先行車両や対向車両等の他車両が仮想先行車両の画像に隠れて視認し難くなることを防ぐことができる。
【発明を実施するための最良の形態】
【0018】
以下、本発明の経路案内システムの実施形態について、図面を参照しながら説明する。図1に、本実施形態の経路案内システムの全体構成を示す。同図に示すように、経路案内システムは、前方カメラ1、画像・位置解析器2、受信機3、道路情報・運転注意情報記憶装置4、交通情報記憶装置5、ナビゲーション装置6、現在位置検出器7を備える。さらに、経路案内システムは、道路情報・3DマップDB8、仮想画像生成器9、室内カメラ10、画像表示器11、走行制御システム12、経路計算用データ格納器13、及びHMIコントローラ14を備える。
【0019】
前方カメラ1は、自車両の前方を撮影する前方撮影用カメラである。この前方カメラ1で撮影された画像は、画像・位置解析器2に出力される。室内カメラ10は、自車両の運転者の視線を検出するために用いられるもので、室内カメラ10撮影した画像は、画像・位置解析器2に出力される。
【0020】
受信機3は、外部のセンタや他車両からの交通情報や先行車両情報等を受信する。この受信した情報は、交通情報記憶装置5に一時的に記憶されるとともに、道路情報・運転注意情報記憶装置4に転送される。
【0021】
道路情報・運転注意情報記憶装置4は、道路の制限速度、道路の分岐・合流・交差の状況等の道路情報や、交差点での一旦停止、徐行等の運転者が注意すべき地点(運転注意地点)の情報を示す運転者注意情報が記憶されている。これらの情報は、その対象となる位置を示す座標データが関連付けられている。
【0022】
交通情報記憶装置5は、受信機3の受信した交通情報等や自車両から送信する情報を一時的に記憶する記憶装置である。なお、ナビゲーション装置6の経路計算において用いられる情報が含まれる場合、その情報はナビゲーション装置6において用いられる。
【0023】
ナビゲーション装置6は、経路計算用データ格納器13に格納される地図データを用いて、目的地へ向かう経路を計算する経路計算機能と、この経路計算機能の計算した経路を案内する経路案内機能を備えている。
【0024】
現在位置検出器7は、自車両の現在位置と進行方向を測定するために用いる計測器であり、例えば、高精度測位が行えるRTKGPS(Real-time kinematic Global Positioning System)等が用いられる。このように、RTKGPSを用いることで、数センチメートル単位での測位が行えるため、自車両の走行速度も高精度で求めることができる。なお、RTKGPSを用いることができない場合、例えば、車速パルス等から車速を検出するようにしてもよい。
【0025】
道路情報・3DマップDB8は、道路の情報(道路の形状、サイズ、位置等)と建造物(例えば、建物、ガードレール、電柱、標識、信号機、樹木等)の情報(建造物の形状、サイズ、位置、方向等)の情報が記憶されている。これらの情報は、受信機3を介して外部から受信した情報によって追加できる構成になっている。
【0026】
画像・位置解析器2は、画像情報解析部と位置情報解析部とにより構成される。画像情報解析部は、前方カメラ1の撮影した画像を解析して、自車両の前方に存在する先行車両や対向車両等を検出する。画像情報解析部では、先行車両や対向車両が検出される場合には、先行車両や対向車両のおおよその車間距離と幅方向位置を先行車両や対向車両の画像サイズと画像上の位置から特定する。
【0027】
ここで、前方カメラ1の撮影した画像は、自車両の進行方向に対して補正をかけている。すなわち、自車両の走行する道路に対する角度と前方カメラ1の設置位置を考慮したうえで、前方カメラ1が撮影した画像から、先行車両や対向車両が道路のどの位置(幅方向位置)をどのような速度で走行しているかを先行車両や対向車両の画像のピクセルから特定する。
【0028】
なお、上述したように、画像解析により先行車両や対向車両のおおよその車間距離と幅方向位置を特定しているが、これに限らず、例えば、ミリ波等の電波やレーザ光等の光を用いたレーダによる先行車両や対向車両の検出結果を組み合わせて、先行車両や対向車両の有無や先行車両や対向車両との相対関係(車間距離、幅方向位置、相対速度等)を検出するようにしてもよい。
【0029】
また、画像情報解析部は、先行車両や対向車両の他車両が検出されない場合は、他車両が存在しない旨の情報を位置情報解析部に送る。先行車両や対向車両が検出された場合は、先行車両や対向車両との相対関係(車間距離、幅方向位置、相対速度等)を示す情報を位置情報解析部に送る。さらに、画像情報解析部は、室内カメラ10の撮影した運転者の顔画像から、運転者の視線位置(どの方向のどの距離に視点をおいている)を測定する。画像情報解析部は、この測定結果である視線位置情報を仮想画像生成器9へ出力する。
【0030】
一方、位置情報解析部は、道路情報・運転注意情報記憶装置4の記憶する運転者注意情報と、現在位置検出器7で測定された現在位置から、運転注意地点が近づいているかを判定する。そして、自車両の前方に運転注意地点が近づいている場合、その地点までの距離を道路情報・運転注意情報記憶装置4に記憶された道路情報を用いて計算する。
【0031】
仮想画像生成器9は、実在しない仮想先行車両の画像を生成するもので、画像表示器11の表示領域に仮想先行車両の画像を表示する際、仮想先行車両の位置や大きさをパラメータとして入力し、運転者の運転状況、視線位置に基づく標準視野(統計的に安全運転をする場合に必要な視野範囲)に応じて、仮想先行車両の画像が画像表示器11の表示領域においてどのように表示されるかを計算する。そして、この計算結果に基づく仮想先行車両の画像を画像表示器11の表示領域に表示するための制御を行う。
【0032】
また、仮想画像生成器9は、目的地へ向かう経路、及び道路情報や交通情報に応じて仮想先行車両の走行状態を変更する。これにより、経路に応じて仮想先行車両の走行状態を変更するとともに、制限速度、信号機の点灯状態、交通規則等の道路状況や、工事や通行止め等の通行規制、自車両の周囲に存在する他車両等の交通状況に応じて仮想先行車両の走行状態を変更することができる。
【0033】
さらに、仮想画像生成器9は、運転者の視点が上述した標準視野から逸脱したときは、仮想先行車両の画像の表示を標準視野逸脱地点で留めるようにする。そして、運転者の視点が再び標準視野に戻ったとき、再び視点に応じた仮想先行車両の画像の表示を行う。このようにすることで、運転者の視線の変更に伴って仮想先行車両の画像の表示位置を計算する必要がなくなるため(標準視野だけの仮想先行車両の画像の表示位置を計算するのみとなるため)、仮想画像生成器9の処理の負荷を軽減することができる。
【0034】
画像表示器11は、その表示領域が自車両のフロントウィンドウに設けられたウィンドシールドディスプレイである。自車両の運転者は、このウィンドシールドディスプレイに表示された画像を自車両の前方の風景と重ねて視認することができる。
【0035】
走行制御システム12は、自車両の駆動系を制御するシステムである。この走行制御システム12を用いて、例えば、上述した運転注意地点に近づくと自動的に自車両を減速するようにしてもよい。具体的には、仮想先行車両に自車両が衝突するような状況になった場合に、仮想先行車両に衝突しないように自動的に走行制御を行うようにしてもよい。
【0036】
また、画像・位置解析器2にて移動物体の検出を行い、移動物体の有無を仮想画像生成器9へ出力してウィンドシールドディスプレイに表示するようにしても良い。この場合、表示の位置は、運転の支障とならない位置(運転者の視野の上下、あるいは右ハンドル車であれば、右下側のサイドミラーの左等)であるとよい。表示タイミングについては、運転の支障にならないタイミング(例えば、先行車両が存在しない場合や信号待ちで停止している場合など)とすればよい。
【0037】
なお、自車両が交差点等で右左折する場合には、自車両の死角となる領域を監視できるように配置した周辺監視カメラ(図示せず)の画像を仮想先行車両の画像の近辺に表示する。これにより、自車両の運転者は、より安全な右左折が可能となる。
【0038】
また、ナビゲーション装置によって指定されたコマンドを運転者が音声入力や操作スイッチによる入力操作で選択した場合、そのコマンドに対応する表示を運転の妨げにならない位置に表示させるようにする。コマンドに対する音声入力やスイッチ操作は、HMIコントローラ14により制御される。なお、表示された画像の光透過度は、表示開始時は設定値以上の光透過度を持つようにする。
【0039】
本実施形態の経路案内システムは、ナビゲーション装置6の経路案内機能として、実在しない仮想先行車両が経路を先行して走行するように自車両の乗員から視認できる仮想先行車両の画像を生成し、この生成した仮想先行車両の画像を自車両のフロントウィンドウに設けられたウィンドシールドディスプレイに表示することによって経路を案内する。
【0040】
これにより、自車両の乗員は、視線を移動することなく、仮想先行車両の画像から目的地へ向かう経路に関する情報を直接的に取得することができる。その結果、自車両の乗員は、仮想先行車両に追従して走行するように運転操作を行うことで、目的地へ向かうことができる。
【0041】
次に、本経路案内システムにおける経路案内機能の表示処理について、図2に示すフローチャートを用いて説明する。先ず、図2に示すステップ(以下、Sと記す)10では、目的地へ向かう経路を計算する。この経路計算では、予めどの地点(例えば、分岐地点、合流地点、交差点等)において、どのような案内を行うかを決定しておき、この決定した経路案内情報を記憶する。
【0042】
なお、仮に経路案内中に自車両が経路から外れた場合は、従来のナビゲーション装置と同じように再度、経路計算を行うものとする。また、経路計算後、外部のセンタ等から交通情報を得た場合、表示開始位置が付け加えるようにする。例えば、経路上の工事中の地点に接近した場合、注意を促す表示を仮想先行車両の画像を用いて行う。
【0043】
S20では、自車両の現在位置を検出し、S30では、表示開始位置に到着したか否かを判定する。ここで、肯定判定される場合にはS40へ処理を進め、否定判定される場合にはS20へ処理を移行する。S40では、この表示開始位置における表示モード(分岐モード、合流モード、右折モード、左折モード等)を経路案内情報に基づいて選択し、S50では、表示データを含む案内すべき内容を経路案内情報から読み出し、この読み出した経路案内情報に応じて、仮想先行車両の走行状態を変更する。
【0044】
例えば、自車両が右折すべき交差点に接近した場合には、表示モードは右折モード(交差点までの距離と自車両の車速に応じて、右折のための車線変更、徐行等の指示を出す表示)となる。
【0045】
S60では、自車両の走行上の安全度合いを確認(判定)し、S70では、この安全度合いに応じた表示を行う。例えば、上述した交通情報や周辺監視カメラの画像等から右側後方から接近する後続車両が確認された場合、車線変更を行うと危険であるか否かの安全度合いを判定し、安全度が低い(危険である)と判定された場合には、車線変更を安全に行うことができる状態になるまで、経路の方向を示しながら直進を続ける等の処理を行う。
【0046】
S80では、表示終了位置を通過したか否かを判定する。ここで、肯定判定される場合にはS20へ処理を移行し、上述した処理を繰り返し行う。一方、否定判定される場合にはS60へ処理を移行し、上述した処理を繰り返す。
【0047】
続いて、本経路案内システムの動作について具体例を示して説明する。先ず、自車両が交差点にて左折する場合におけるシステム動作フローについて、図3及び図4に示すフローチャートを用いて説明する。先ず、S100では、画像・位置解析器2において先行車両が存在しないか否かを判定する。ここで、肯定判定される場合にはS110へ処理を進め、否定判定される場合にはS120へ処理を進める。
【0048】
S110では、目的地へ向かう経路を先行して走行する仮想先行車両の画像を表示する。なお、仮想先行車両は、運転者が仮想的な車両であることが容易に把握できるように単一色等で表示する。また、特に仮想先行車両の画像は、車両の形状を示すものでなくともよい(例えば、人物、マスコット、飛行機等。)。
【0049】
S120では、実在する先行車両の位置を判定するとともに、ウィンドシールドディスプレイ上において、実在する先行車両と仮想先行車両とが重なる部分があるか否かを判定する。ここで、肯定判定される場合にはS130へ処理を進め、否定判定される場合にはS110へ処理を移行する。
【0050】
S130では、実在する先行車両と仮想先行車両とが重なる部分を算出して、その重なる部分の仮想先行車両の光透過度を高くして、実在する先行車両が自車両の運転者から見えるようにする。これにより、自車両の乗員から実在する先行車両や対向車両等の他車両が仮想先行車両の画像に隠れて視認し難くなることを防ぐことができる。
【0051】
また、重なる部分の周辺の光透過度については、完全に重なる部分に比べて若干光透過度を低くした段階的な光透過度を用いて、実在する先行車両の周辺が見えるようにする。このようにすると、自車両に揺れが生じたり、自車両の乗員の視線が移動したりしたとしても、仮想先行車両の画像により実在する先行車両が見え難くならないようにすることができる。
【0052】
S140では、仮想先行車両が経路を走行し始めると、自車両から、例えば、左折すべき交差点までの距離が第1設定距離(例えば300m)以下となったか否かを判定する。ここで、肯定判定される場合にはS150へ処理を進め、否定判定される場合にはS100へ処理を移行する。
【0053】
S150では、仮想先行車両のウィンカを点滅させるとともに、自車両の車速を減速させるため、仮想先行車両のブレーキランプを点灯させ、さらに、仮想先行車両との車間距離を短くする。
【0054】
これにより、自車両が車線変更したり右左折したりする必要がある場合に仮想先行車両のウィンカを点滅させることができる。その結果、自車両の乗員は、仮想先行車両の画像から車線変更、又は右左折する必要があることを把握することができる。また、自車両が減速したり停止したりする必要がある場合に仮想先行車両のブレーキランプを点灯させつつ、仮想先行車両との車間距離を短くすることができる。その結果、自車両の乗員は、仮想先行車両の画像から減速や停止をする必要があることを把握することができる。
【0055】
なお、運転者が仮想先行車両の接近に気づかない場合、運転者の意識が低いと判定し、警報を出すようにしてもよい。これにより、運転者の注意レベル(認知・判断)が判定できる。
【0056】
S160では、車速パルス等により車速を検出し、自車両の速度が第1設定速度(例えば30km/h)以下まで減速したか否かを判定する。ここで、肯定判定される場合にはS170へ処理を進め、否定判定される場合にはS150の処理を繰り返し行う。
【0057】
S170では、先行車両が存在しないか否かを判定する。ここで、肯定判定される場合にはS180へ処理を進め、否定判定される場合にはS190へ処理を進める。S180では、目的地へ向かう経路を先行して走行する仮想先行車両の画像を表示する。S190では、実在する先行車両の位置を判定するとともに、その位置が仮想先行車両と重なる位置にあるかを判定する。ここで、肯定判定される場合にはS200へ処理を進め、否定判定される場合にはS180へ処理を移行する。
【0058】
S200では、実在する先行車両と仮想先行車両とが重なる部分を算出して、重なる部分の光透過度を高くして、実在する先行車両が自車両の運転者から見えるようにする。S210では、自車両から、例えば、左折すべき交差点までの距離が第2設定距離(例えば100m)以下となったか否かを判定する。ここで、肯定判定される場合にはS220へ処理を進め、否定判定される場合にはS170へ処理を移行する。
【0059】
S220では、表示すべき仮想先行車両の画像として、仮想先行車両のウィンカを点滅させるとともに、自車両の車速を第2設定速度(例えば10km/h)まで減速させるために、ブレーキランプを点灯させ、さらに、仮想先行車両との車間距離を短くする。
【0060】
S230では、車速パルス等により車速を検出し、自車両の速度が第2設定速度以下まで減速したか否かを判定する。ここで、肯定判定される場合にはS240へ処理を進め、否定判定される場合にはS220の処理を繰り返し行う。
【0061】
S240では、再び、先行車両が存在しないか否かを判定する。ここで、肯定判定される場合にはS250へ処理を進め、否定判定される場合にはS260へ処理を進める。S250では、目的地へ向かう経路を先行して走行する仮想先行車両の画像を表示する。S260では、実在する先行車両の位置を判定するとともに、その位置が仮想先行車両と重なる位置にあるかを判定する。ここで、肯定判定される場合にはS270へ処理を進め、否定判定される場合にはS250へ処理を移行する。
【0062】
S270では、実在する先行車両と仮想先行車両とが重なる部分を算出して、重なる部分の光透過度を高くして、実在する先行車両が自車両の運転者から見えるようにする。S280では、自車両が左折を済ませたか否かを判定する。ここで、肯定判定される場合にはS290へ処理を進め、否定判定される場合にはS240へ処理を移行し、上述した処理を繰り返し行う。
【0063】
S290では、仮想先行車両のウィンカ及びブレーキランプを消灯させるとともに、仮想先行車両との車間距離を長くする(仮想先行車両が加速する)。S300では、車速パルス等により、自車両の速度が第3設定速度以上(例えば、60km/h)まで加速したか否かを判定する。ここで、肯定判定される場合には本処理を終了し、否定判定される場合にはS290の処理を繰り返し行う。
【0064】
次に、仮想先行車両の表示イメージを示す。図5及び図6は、右車線から右折レーンに入り、交差点で右折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【0065】
図5(a)に示すように、自車両が右折すべき交差点に接近すると、右折対象の交差点の位置が矢印で表示されるとともに、右車線へ車線変更するために仮想先行車両のウィンカを点滅させる。自車両の運転者は、この仮想先行車両のウィンカの点滅が開始されたのを見て、自車両のウィンカを操作する。
【0066】
図5(b)に示すように、自車両が右折すべき交差点に接近するに従って、仮想先行車両の幅方向位置を徐々に右折レーンに移動させる。図5(c)に示すように、仮想先行車両が右折すべき交差点に近づくと、仮想先行車両の画像の光透過度を高くして、運転者が対向車両の存在を把握できるようにする。また、交差点直前で徐行が必要な場合には、仮想先行車両のブレーキランプを点灯させる。
【0067】
図6(a)に示すように、直進する対向車両が実在する場合、仮想先行車両のブレーキランプを点灯させる。一方、図6(b)に示すように、実在する対向車両の右ウィンカの点滅と徐行や停止が確認された場合、すなわち、右折する対向車両が実在する場合、仮想先行車両を発進させて右折を開始する。このように、自車両が停止した後に発進可能となった場合、仮想先行車両を発進させることで、自車両の乗員は、仮想先行車両の画像から発進可能であることを把握することができる。
【0068】
なお、横断歩道を横断する歩行者や自動二輪車の対向車両が検知された場合、仮想先行車両は交差点で停止する。このように、自車両が停止する必要がある場合、その停止すべき地点で仮想先行車両を停止させる。これにより、自車両の乗員は、仮想先行車両の画像から停止すべき地点を把握することができる。
【0069】
図7(a)〜(c)は、左車線へ移動して交差点で左折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。図7(a)に示すように、自車両が左折すべき交差点に接近すると、左折対象の交差点の位置が矢印で表示されるとともに、左車線へ車線変更するために仮想先行車両のウィンカを点滅させる。
【0070】
そして、図7(b)に示すように、自車両が左折すべき交差点に接近するに従って、仮想先行車両の幅方向位置を徐々に左車線に移動させる。運転者は、この仮想先行車両の画像を見て、自車両のウィンカを操作するとともに、ハンドルを操作して左車線に移動する。
【0071】
この車線変更をする際、左側後方から接近する後続車両が周辺監視カメラの画像等から確認されている場合、仮想先行車両は、左車線への車線変更を遅らせる(ウィンカは点滅させても幅方向位置は変更しない)ようにし、安全が確認されてから左車線への車線変更を開始するようにする。
【0072】
また、自車両が予め左折レーン内に位置しない場合には、例えば、交差点までの距離が設定距離4(例えば500mm)以下となった場合に、仮想先行車両のウィンカを点滅させ、周辺監視カメラの画像をウィンドシールドディスプレイに表示するとよい。
【0073】
さらに、周辺監視カメラの画像を画像・位置解析器2にて動体検出処理し、この処理の検出結果から、自車両の左レーンに後続車両が存在しない、或いは、後続車両との車間距離が長いと判断できる場合には、仮想先行車両を左折レーンに車線変更させる。これにより、運転者が直接視認できない領域についても安全を確認し、左折することができるようになる。なお、動体検出処理は、画像のフレーム間の差分検出にて得られた物体の大きさにより行えばよい。
【0074】
図7(c)に示すように、仮想先行車両が左折すべき交差点に近づくと、仮想先行車両の画像の光透過度を高くして、運転者が歩行者等の存在を把握できるようにする。また、交差点直前で徐行が必要な場合には、仮想先行車両のブレーキランプを点灯させる。そして、左折時には、横断中の歩行者や自車両の左側死角に小型車両が存在しないことが確認された場合、仮想先行車両は左折を開始する。
【0075】
図8は、減速、徐行、停止する場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。図8(a)に示すように、自車両が停止や徐行する必要があることを運転者に知らせるために、仮想先行車両のブレーキランプを点灯させる。また、図8(b)に示すように、停車中である場合には、自車両の運転者から前方の風景が見えるように、仮想先行車両の画像の光透過度を高くする。
【0076】
さらに、図8(c)に示すように、踏切、信号機、停止標識、渋滞、工事中等の情報が外部のセンタ等から取得した場合、その停止原因を示す標識やマークを仮想先行車両に重畳表示するようにしてもよい。また、必要に応じて、渋滞等の詳細な情報(渋滞時間、渋滞距離、通過時間)を示すマークや文字を仮想先行車両に重畳表示するようにしてもよい。これにより、運転者は、仮想先行車両が停止・徐行した原因を視線を移動することなく把握することができる。
【0077】
(変形例1)
例えば、交差点等において自車両が先頭で停車する場合、仮想先行車両の存在により、交差点での停車位置が停止線から後方となることが考えられる。そのため、例えば、図9(a)に示すように、仮想先行車両の長さを縮めたり、あるいは、図9(b)に示すように、仮想先行車両の画像の光透過度を高くしたりして、自車両の停車位置を停止線に近づけるようにすることが好ましい。また、自車両の前方に先行車両が存在する場合には、仮想先行車両の画像を完全に透明にするようにしてもよい。
【0078】
(変形例2)
例えば、経路にトンネルが含まれる場合、そのトンネルの入口又は出口付近において仮想先行車両のテールランプを点灯又は消灯させるようにしてもよい。これにより、自車両の乗員は、仮想先行車両の画像からヘッドライトを点灯又は消灯する必要があることを把握することができる。
【0079】
(変形例3)
例えば、仮想先行車両のブレーキランプを点灯させても運転者が減速操作を行わない場合、運転者がブレーキランプの点灯を見逃したと判断して、自動的に自車両の車速を減速するようにしても良い。さらに、左折地点までの距離が第2設定距離以下となった場合、自車両が左折を完了するまで、他車両の巻込み防止のために周辺監視カメラの画像を画像表示器11の表示領域に表示するようにしても良い。
【図面の簡単な説明】
【0080】
【図1】本実施形態の経路案内システムの全体構成を示すブロック図である。
【図2】経路案内システムにおける経路案内機能の表示処理の流れを示すフローチャートである。
【図3】自車両が交差点にて右左折する場合における本経路案内システムの動作フローの前半部分を示したフローチャートである。
【図4】自車両が交差点にて右左折する場合における本経路案内システムの動作フローの後半部分を示したフローチャートである。
【図5】(a)〜(c)は、右側車線から右折レーンに入り、交差点で右折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図6】(a)、(b)は、交差点で右折する際に対向車両が存在する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図7】(a)〜(c)は、左側車線へ移動し、交差点で左折する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図8】(a)〜(c)は、自車両が減速、徐行、停止する必要がある場合の仮想先行車両をウィンドシールドディスプレイに表示したイメージ図である。
【図9】(a)、(b)は、変形例1における仮想先行車両の表示例を示した図である。
【符号の説明】
【0081】
1 前方カメラ
2 画像・位置解析器
3 受信機
4 道路情報・運転注意情報記憶装置
5 交通情報記憶装置
6 ナビゲーション装置
7 現在位置検出器
8 道路情報・3DマップDB
9 仮想画像生成器
10 室内カメラ
11 画像表示器
12 走行制御システム
13 経路計算用データ格納器
14 HMIコントローラ
【特許請求の範囲】
【請求項1】
目的地へ向かう経路を計算する経路計算手段と、
実在しない仮想先行車両が前記経路を先行して走行するように自車両の乗員から視認できる前記仮想先行車両の画像を生成する仮想画像生成手段と、
前記自車両のフロントウィンドウに表示領域が設けられ、該表示領域に表示された画像を前記自車両の前方の風景と重ねて視認可能なウィンドシールドディスプレイと、
前記仮想画像生成手段の生成した前記仮想先行車両の画像を前記表示領域に表示することによって前記経路を案内する経路案内手段と、を備えることを特徴とする経路案内システム。
【請求項2】
前記自車両の前方の前記経路における道路状況、又は/及び交通状況に関する道路交通情報を取得する道路交通情報取得手段を備え、
前記仮想画像生成手段は、前記経路、又は/及び前記道路交通情報取得手段の取得した情報に応じて前記仮想先行車両の走行状態を変更する走行状態変更手段を備えることを特徴とする請求項1記載の経路案内システム。
【請求項3】
前記走行状態変更手段は、前記自車両が車線変更、又は右左折する必要がある場合、前記仮想先行車両のウィンカを点滅させることを特徴とする請求項2記載の経路案内システム。
【請求項4】
前記走行状態変更手段は、前記自車両が減速、又は停止する必要がある場合、前記仮想先行車両のブレーキランプを点灯させることを特徴とする請求項2記載の経路案内システム。
【請求項5】
前記走行状態変更手段は、前記自車両が減速する必要がある場合、前記仮想先行車両との車間距離を短くすることを特徴とする請求項2又は4記載の経路案内システム。
【請求項6】
前記走行状態変更手段は、前記自車両が停止する必要がある場合、その停止すべき地点で前記仮想先行車両を停止させることを特徴とする請求項2又は4記載の経路案内システム。
【請求項7】
前記走行状態変更手段は、前記自車両が停止した後に発進可能となった場合、前記仮想先行車両を発進させることを特徴とする請求項6記載の経路案内システム。
【請求項8】
前記走行状態変更手段は、前記経路にトンネルが含まれる場合、該トンネルの入口又は出口付近において前記仮想先行車両のテールランプを点灯又は消灯させることを特徴とする請求項1〜7の何れか1項に記載の経路案内システム。
【請求項9】
前記自車両の前方に存在する他車両を検出する他車両検出手段を備え、
前記仮想画像生成手段は、前記他車両検出手段が他車両を検出した場合、前記表示領域において前記他車両と前記仮想先行車両の画像とが重なる部分について、前記仮想先行車両の光透過度を高くした画像を生成することを特徴とする請求項1〜9の何れか1項に記載の経路案内システム。
【請求項1】
目的地へ向かう経路を計算する経路計算手段と、
実在しない仮想先行車両が前記経路を先行して走行するように自車両の乗員から視認できる前記仮想先行車両の画像を生成する仮想画像生成手段と、
前記自車両のフロントウィンドウに表示領域が設けられ、該表示領域に表示された画像を前記自車両の前方の風景と重ねて視認可能なウィンドシールドディスプレイと、
前記仮想画像生成手段の生成した前記仮想先行車両の画像を前記表示領域に表示することによって前記経路を案内する経路案内手段と、を備えることを特徴とする経路案内システム。
【請求項2】
前記自車両の前方の前記経路における道路状況、又は/及び交通状況に関する道路交通情報を取得する道路交通情報取得手段を備え、
前記仮想画像生成手段は、前記経路、又は/及び前記道路交通情報取得手段の取得した情報に応じて前記仮想先行車両の走行状態を変更する走行状態変更手段を備えることを特徴とする請求項1記載の経路案内システム。
【請求項3】
前記走行状態変更手段は、前記自車両が車線変更、又は右左折する必要がある場合、前記仮想先行車両のウィンカを点滅させることを特徴とする請求項2記載の経路案内システム。
【請求項4】
前記走行状態変更手段は、前記自車両が減速、又は停止する必要がある場合、前記仮想先行車両のブレーキランプを点灯させることを特徴とする請求項2記載の経路案内システム。
【請求項5】
前記走行状態変更手段は、前記自車両が減速する必要がある場合、前記仮想先行車両との車間距離を短くすることを特徴とする請求項2又は4記載の経路案内システム。
【請求項6】
前記走行状態変更手段は、前記自車両が停止する必要がある場合、その停止すべき地点で前記仮想先行車両を停止させることを特徴とする請求項2又は4記載の経路案内システム。
【請求項7】
前記走行状態変更手段は、前記自車両が停止した後に発進可能となった場合、前記仮想先行車両を発進させることを特徴とする請求項6記載の経路案内システム。
【請求項8】
前記走行状態変更手段は、前記経路にトンネルが含まれる場合、該トンネルの入口又は出口付近において前記仮想先行車両のテールランプを点灯又は消灯させることを特徴とする請求項1〜7の何れか1項に記載の経路案内システム。
【請求項9】
前記自車両の前方に存在する他車両を検出する他車両検出手段を備え、
前記仮想画像生成手段は、前記他車両検出手段が他車両を検出した場合、前記表示領域において前記他車両と前記仮想先行車両の画像とが重なる部分について、前記仮想先行車両の光透過度を高くした画像を生成することを特徴とする請求項1〜9の何れか1項に記載の経路案内システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−284195(P2006−284195A)
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願番号】特願2005−100628(P2005−100628)
【出願日】平成17年3月31日(2005.3.31)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願日】平成17年3月31日(2005.3.31)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]