
経路案内装置、経路案内方法、進行方角指示器、基準位置標示器及びプログラム
【課題】利用者によって把持される方向によらずに正しく経路案内を行う。
【解決手段】経路案内装置1は、利用者の現在位置を示す基準位置標示器20と利用者の進行方角を示す方角指示器10とを備える。そして、経路案内装置1は、基準位置標示器20から方角指示器10へ伸びる半直線が示す方角を算出し、複数の分岐路のそれぞれが伸びる方角のうち、算出した方角に最も近似した方角を進行方角として選択する。そして、経路案内装置1は、進行方角と利用者を案内すべき方角(案内方角)とが一致するか否かを判定し、一致する場合には方角指示器10を震動させ、一致しない場合には方角指示器10の震動を停止させる。
【解決手段】経路案内装置1は、利用者の現在位置を示す基準位置標示器20と利用者の進行方角を示す方角指示器10とを備える。そして、経路案内装置1は、基準位置標示器20から方角指示器10へ伸びる半直線が示す方角を算出し、複数の分岐路のそれぞれが伸びる方角のうち、算出した方角に最も近似した方角を進行方角として選択する。そして、経路案内装置1は、進行方角と利用者を案内すべき方角(案内方角)とが一致するか否かを判定し、一致する場合には方角指示器10を震動させ、一致しない場合には方角指示器10の震動を停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置、経路案内方法、方角指示器、基準位置標示器及びプログラムに関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System)による位置検出機能を有し、目的地までの経路を表示する経路案内装置(例えば、カーナビゲーションシステムや、携帯電話端末の経路案内アプリケーションなど)が普及している。しかしながら、従来の経路案内装置が表示する地図を参照しても、目印となる建造物がなく、地図上に表示された経路のみではどの方向に進めばよいか判断しづらいという問題がある。
近年では、これらの課題に鑑み、地図表示によらない経路案内方法が提案されている。
【0003】
特許文献1には、経路案内装置の方向が正しい案内方角を向いているときに、当該経路案内装置の振動を大きくし、誤った方向を向いているときに振動を小さくする技術が開示されている。これにより、利用者は、複数の分岐路が交差する分岐点において、経路案内装置を分岐路の進行方角へ向けることで、何れの分岐路が正しい案内方角であるかを認識することができる。
なお、本明細書では、「方向」を、前後左右上下のような観測者によって変化する相対的な向きのことを示すものと定義し、「方角」を、東西南北天地のような観測者によって変化しない絶対的な向きのことを示すものと定義する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−221277号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1に記載の経路案内装置は、方位センサが北方向と自装置の所定の基準方向とがなす角の角度を算出し、当該角度に基づいて進行方角を判定する。そのため、利用者は、常に経路案内装置の基準方向を進行方角に向ける必要があり、利用者が経路案内装置を把持する方向と経路案内装置の基準方向とにズレがあった場合、正しく経路案内がなされないという問題があった。特に、経路案内装置がディスプレイを有さない場合、何れの方向が経路案内装置の基準方向であるかを見極めることが困難となる。
【0006】
本発明は、上記の問題に鑑みてなされたものであり、利用者によって把持される方向によらずに正しく経路案内を行う経路案内装置、経路案内方法、進行方角指示器、基準位置標示器及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は上記の課題を解決するためになされたものであり、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置であって、前記各分岐路の方角を入力する分岐路情報入力部と、案内する方角を入力する案内方角情報入力部と、前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択する分岐路選択部と、前記利用者に刺激を与える刺激部と、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部とを備えることを特徴とする。
【0008】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を用いた経路案内方法であって、分岐路情報入力部は、前記各分岐路の方角を入力し、案内方角情報入力部は、案内する方角を入力し、方角算出部は、前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出し、分岐路選択部は、前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択し、出力制御部は、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて利用者に刺激を与える刺激部による刺激の有無を制御することを特徴とする。
【0009】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器であって、前記各分岐路の方角を入力する分岐路情報入力部と、案内する方角を入力する案内方角情報入力部と、前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部と、前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部と、前記利用者に刺激を与える刺激部と、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部とを備えることを特徴とする。
【0010】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器であって、自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、前記方角算出部が算出した方角を前記方角指示器に送信する送信部とを備えることを特徴とする。
【0011】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器を、前記各分岐路の方角を入力する分岐路情報入力部、案内する方角を入力する案内方角情報入力部、前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部、前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて、利用者に刺激を与える刺激部による刺激の有無を制御する出力制御部として機能させるためのプログラムである。
【0012】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器を、自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部、前記方角算出部が算出した方角を前記方角指示器に送信する送信部として機能させるためのプログラムである。
【発明の効果】
【0013】
本発明によれば、経路案内装置が進行方角を判定する基準方向は、基準位置標示器及び方角指示器の把持方向によらず、基準位置標示器から方角指示器へ伸びる半直線が示す方向となる。これにより、経路案内装置は、利用者によって把持される方向によらずに正しく経路案内を行うことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態による経路案内装置の構成及び動作を示す図である。
【図2】本発明の一実施形態による経路案内装置の構成を示す概略ブロック図である。
【図3】基準位置装置による方角の検出を示す概略ブロック図である。
【図4】経路案内装置の動作を示すシーケンス図である。
【図5】分岐路選択部が進行方向の分岐路を選択する動作を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
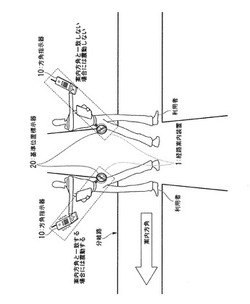
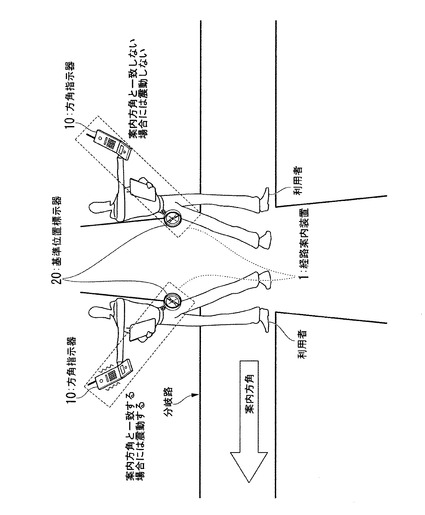
図1は、本発明の一実施形態による経路案内装置の構成及び動作を示す図である。
経路案内装置1は、方角指示器10と基準位置標示器20とを備える。方角指示器10と基準位置標示器20とは無線または有線で接続される。但し、有線で接続されている場合、方角指示器10と基準位置標示器20とは、可撓性の高い通信ケーブルで接続されているものとする。
方角指示器10は、GPS機能を有する携帯電話端末であって、利用者の手に把持され、利用者が進もうとする方角(以降、進行方角と呼ぶ)に向けられることで、利用者の進行方角を示す。なお、方角指示器10は、基準位置標示器20から進行方角を受信し、利用者を案内すべき方角(以降、案内方角と呼ぶ)と当該進行方角とが合致するときに振動する。
基準位置標示器20は、利用者の胴体に取り付けられることで、利用者の現在位置を示す。なお、基準位置標示器20は、自身から方角指示器10へ伸びる半直線が示す方角を算出し、当該方角を進行方角として方角指示器10に送信する。
【0016】
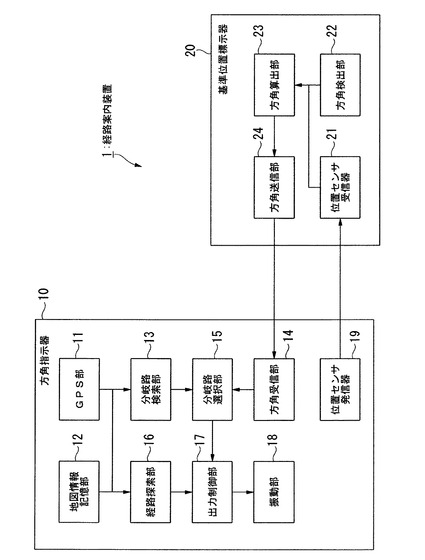
図2は、本発明の一実施形態による経路案内装置の構成を示す概略ブロック図である。
方角指示器10は、GPS部11、地図情報記憶部12、分岐路検索部13、方角受信部14、分岐路選択部15(分岐路情報入力部)、経路探索部16、出力制御部17(案内方角情報入力部)、震動部18、位置センサ発信器19を備える。
GPS部11は、GPS衛星から信号を受信し、自身の現在位置を測定する。
地図情報記憶部12は、道路情報を含む地図情報を記憶する。
分岐路検索部13は、GPS部11が測定する現在位置と、地図情報記憶部12が記憶する地図情報とに基づいて、現在位置に存在する分岐路を検索する。
方角受信部14は、基準位置標示器20から利用者の進行方角を受信する。
分岐路選択部15は、分岐路検索部13による検索結果として得られた分岐路の中から、方角受信部14が受信した進行方角に最も近い方角を有する分岐路を選択する。
経路探索部16は、利用者から目的地の入力を受け付け、GPS部11が測定する現在位置と地図情報記憶部12が記憶する地図情報とに基づいて目的地までの経路を探索し、利用者を案内すべき分岐路を決定する。
出力制御部17は、経路探索部16が決定した案内すべき分岐路と分岐路選択部15が選択した分岐路とが一致するか否かを判定し、一致する場合に震動部18を振動させる。
震動部18は、出力制御部17からの入力に基づいて振動する。
位置センサ発信器19は、超音波を発し、基準位置標示器20に自身の位置を通知する。
【0017】
図3は、基準位置装置による方角の検出を示す概略ブロック図である。
基準位置標示器20は、位置センサ受信器21、方角検出部22、方角算出部23、方角送信部24を備える。
位置センサ受信器21は、方角指示器10の位置センサ発信器19から超音波を受信し、自身の位置を基準点としたときの方角指示器10の位置を検出する。
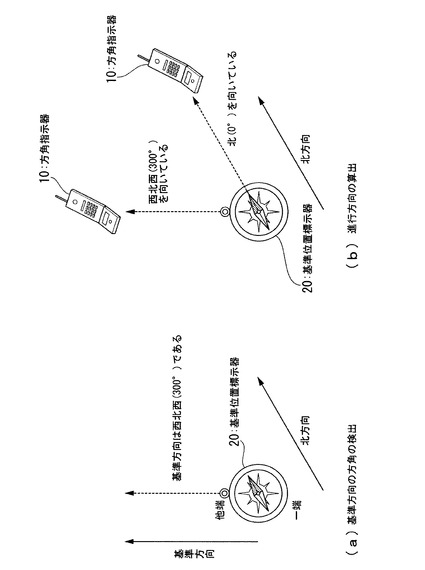
方角検出部22は、図3(a)に示すように、内蔵する電子コンパスなどにより、基準位置標示器20の一端から他端へ向かう方向を基準方向として、北方向に対して当該基準方向が示す方角を検出する。なお、方角検出部22は、方角として自身から北方向へ伸びる半直線と、自身から基準方向へ伸びる半直線とがなす角の角度を出力する。
方角算出部23は、図3(b)に示すように、方角検出部22が検出した方角と位置センサ受信器21が検出した方角指示器10の位置とに基づいて、北方向に対して自身から方角指示器10へ伸びる半直線が示す方角を算出する。
方角送信部24は、方角算出部23が算出した方角を進行方角として方角指示器10に送信する。
【0018】
ここで、位置センサ発信器19と位置センサ受信器21によって、基準位置標示器の位置を基準点としたときの方角指示器10の位置が検出できる理由を説明する。
位置センサ受信器21は、1つの位置センサ発信器19に対して基準位置標示器20に3つ備えられる。そして、位置センサ受信器21の各々は、位置センサ発信器19から超音波が到達するまでの時間遅れを計測する。そして、位置センサ受信器21は、それぞれの時間遅れに基づいて三角測量を行うことで、位置センサ発信器19と位置センサ受信器21との位置関係を定めることができる。
【0019】
そして、このような構成を備えることで、経路案内装置1において、分岐路選択部15は、分岐路検索部13が検索した各分岐路の方角を入力し、出力制御部17は、経路探索部16が探索した案内方角を入力する。次に、方角算出部23は、利用者の現在位置を示す基準位置標示器20から利用者の進行方角を示す方角指示器10へ伸びる半直線が示す方角を算出し、分岐路選択部15は、分岐路検索部13から入力した方角のうち、方角算出部23が算出した方角に最も近似した方角を選択する。そして、出力制御部17は、分岐路選択部15が選択した方角と経路探索部16から入力した方角とが一致するか否かに基づいて震動部18の振動の有無を制御する。
これにより、経路案内装置1は、利用者によって把持される方向によらずに正しく経路案内を行う。
【0020】
次に、本実施形態による経路案内装置1の動作を説明する。
まず、利用者は、経路案内装置1による案内操作を行う前に、基準位置標示器20を胴体に取り付ける。そして、方角指示器10を手で把持する。そして、利用者は、方角指示器10の図示しない操作部を操作し、方角指示器10に経路案内アプリケーションを実行させる。
【0021】
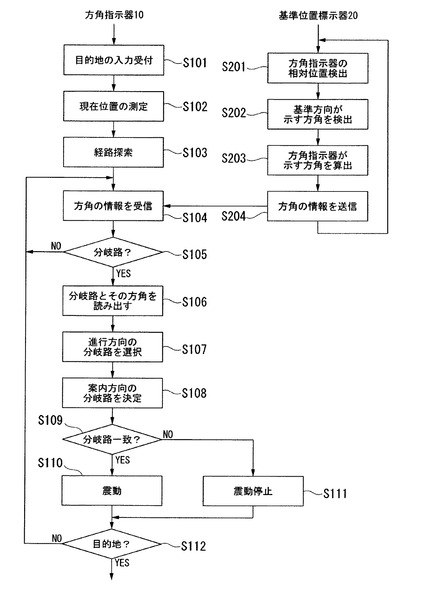
図4は、経路案内装置の動作を示すシーケンス図である。
方角指示器10は、経路案内アプリケーションの実行を開始すると、経路探索部16は、図示しない操作部を介して利用者から目的地の入力を受け付ける(ステップS101)。次に、GPS部11は、GPS衛星から信号を受信し、現在位置の測定を行う(ステップS102)。次に、経路探索部16は、GPS部11が測定した現在位置と、地図情報記憶部12が記憶する地図情報とに基づいて、現在位置から目的地までの経路を探索する(ステップS103)。経路の探索方法は、ダイクストラ法などの経路探索法を用いて行うと良い。また、ダイクストラ法に限らず、他の経路探索法を用いて行っても良い。
【0022】
このとき、基準位置標示器20の位置センサ受信器21は、方角指示器10の位置センサ発信器19から発信される超音波を受信し、自身の位置を基準点としたときの方角指示器10の相対位置を検出する(ステップS201)。このとき、位置センサ受信器21は、基準位置標示器20の基準方向をX軸とし、当該X軸に直交するY軸及びZ軸からなり、基準位置標示器20の位置を原点とする座標系における、方角指示器10の位置を算出する。
また、方角検出部22は、内蔵する電子コンパスに基づいて、北方向に対して自身の基準方向が示す方角を検出する(ステップS202)。
【0023】
次に、方角算出部23は、位置センサ受信器21が検出した方角指示器10の相対位置と方角検出部22が検出した方角とに基づいて、自身から方角指示器10へ伸びる半直線が示す方角を算出する。すなわち、方角算出部23は、方角指示器10が示す方角を算出する(ステップS203)。具体的には、方角算出部23は、まず位置センサ受信器21が検出したXYZ座標系における方角指示器10の位置を、基準方向を示すX軸とX軸に対して水平方向に直行するY´軸とからなる二次元のXY´座標系に射影する。次に、方角算出部23は、原点から方角指示器10の位置へ伸びる半直線をXY´座標系に生成する。つまり、ここで生成した半直線は、基準方向に対する方角指示器10の位置する方角を示す。
他方、方角算出部23は、XY´座標系上に、原点を始点とし、X軸に対して方角検出部22が検出した方角が示す角度だけ傾けた半直線を生成する。つまり、ここで生成した半直線は、北方向を示す。
そして、方角算出部23は、北方向を示す半直線と基準方向に対する方角指示器10の位置する方角を示す半直線とがなす角の角度を、自身から方角指示器10へ伸びる半直線が示す方角として算出する。
【0024】
方角算出部23が、ステップS203で、自身から方角指示器10へ伸びる半直線が示す方角を算出すると、方角送信部24は、方角算出部23が算出した方角を示す情報を方角指示器10に送信する(ステップS204)。基準位置標示器20は、方角を示す情報の送信を終了すると、ステップS201に戻り、再度方角指示器10の位置検出を行なう。
【0025】
方角指示器10の方角受信部14は、基準位置標示器20から自身へ伸びる半直線が示す方角を示す情報を、基準位置標示器20から受信する(ステップS104)。方角受信部14が方角を示す情報を受信し、経路探索部16がステップS103による経路探索を完了すると、分岐路検索部13は、地図情報記憶部12が記憶する地図情報とGPS部11が測定した現在位置とに基づいて、現在位置に分岐路があるか否かを判定する(ステップS105)。
【0026】
分岐路検索部13が、現在位置に分岐路が無いと判定した場合(ステップS105:NO)、ステップS4に戻り、基準位置標示器20から次の方角の情報の受信を待機し、経路案内を継続する。他方、分岐路検索部13が、現在位置に分岐路があると判定した場合(ステップS105:YES)、分岐路検索部13は、地図情報記憶部12が記憶する地図情報から、現在位置に存在する各分岐路とその方角を読み出す(ステップS106)。
【0027】
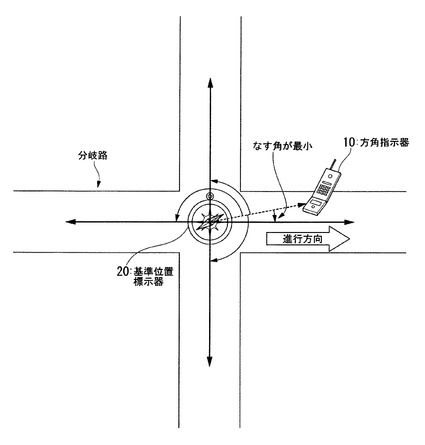
図5は、分岐路選択部が進行方向の分岐路を選択する動作を示す図である。
次に、分岐路選択部15は、分岐路検索部13が読み出した各分岐路のうち、方角受信部14が受信した情報が示す方角に最も近似するものを進行方向の分岐路として選択する(ステップS107)。具体的には、分岐路選択部15は、図5に示すように、分岐路検索部13が読み出した各分岐路の方角と方角受信部14が受信した情報が示す方角とがなす角の角度を算出する。そして、分岐路選択部15は、算出した角度のうち最小の角度をなす分岐路を進行方向の分岐路として選択する。
【0028】
分岐路選択部15が進行方向の分岐路を選択すると、経路探索部16は、ステップS103で探索した経路とGPS部11が測定した現在位置とに基づいて、案内方角の分岐路を決定する(ステップS108)。次に、出力制御部17は、ステップS107で分岐路選択部15が選択した進行方向の分岐路と、ステップS108で決定した案内方角の分岐路とが一致するか否かを判定する(ステップS109)。
出力制御部17は、進行方向の分岐路と案内方角の分岐路とが一致すると判定した場合(ステップS109:YES)、震動部18に出力する発振信号をONに切り替え、方角指示器10を振動させる(ステップS110)。他方、出力制御部17は、進行方向の分岐路と案内方角の分岐路とが一致しないと判定した場合(ステップS109:NO)、震動部18に出力する発振信号をOFFに切り替え、方角指示器10の振動を停止させる(ステップS111)。
これにより、利用者は、方角指示器10を四方八方に動かし、向けたときに方角指示器10が震動する方向へ進むことで、目的地にたどり着くことができる。
【0029】
次に、経路探索部16は、ステップS103で探索した経路とステップS102でGPS部11が測定した現在位置とに基づいて、現在位置が目的地であるか否かを判定する(ステップS112)。経路探索部16は、現在位置が目的地であると判定した場合(ステップS112:YES)、経路案内装置1は、処理を終了する。
他方、経路探索部16は、現在位置が目的地でないと判定した場合(ステップS112:NO)、ステップS104に戻り、基準位置標示器20から方角を示す情報の受信し、経路案内を継続する。
【0030】
このように、本実施形態によれば、経路案内装置1が進行方角を判定する基準方向は、基準位置標示器20及び方角指示器10の把持方向によらず、基準位置標示器20から方角指示器10へ伸びる半直線が示す方向となる。これにより、経路案内装置1は、利用者によって把持される方向によらずに正しく経路案内を行うことができる。
【0031】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、基準位置標示器20が位置センサ受信器21、方角検出部22、及び方角算出部23を備え、基準位置標示器20が、方角指示器10が示す方角を算出する場合を説明したが、これに限られない。例えば、方角指示器10が位置センサ受信器21、方角検出部22、及び方角算出部23を備え、基準位置標示器20が位置センサ発信器19を備えることで、方角指示器10で方角指示器10が示す方角を算出しても良い。特にこの場合、方角指示器10と基準位置標示器20との間で通信を行う必要が無いため、方角受信部14及び方角送信部24を備えなくても良い。
【0032】
また、本実施形態では、進行方向と案内方角とが合致したときに方角指示器10を震動させ、進行方向と案内方角とが合致しないときに方角指示器10を震動させない場合を説明したが、これに限られない。
例えば、進行方向と案内方角とが合致したときに方角指示器10を震動させず、進行方向と案内方角とが合致しないときに方角指示器10を震動させるようにしても良い。
また、例えば、震動部18を基準位置標示器20に備え、進行方向と案内方角とが合致したときに基準位置標示器20を震動させ、進行方向と案内方角とが合致しないときに基準位置標示器20を震動させないようにしても良い。
また、例えば、震動部に変えて、発光部を備え、進行方向と案内方角とが合致したときに方角指示器10を発光させ、進行方向と案内方角とが合致しないときに方角指示器10を発光させないようにするなど、経路案内装置1は、利用者に震動以外(例えば、光、音声など)の刺激を与えても良い。
【0033】
また、本実施形態では、位置センサ受信器21が位置センサ発信器19により発せられる超音波に基づいて位置を検出する場合を説明したが、これに限られず、例えば電波の受信遅延や、ジャイロセンサと距離センサとの組み合わせなど、他の方法によって位置を検出しても良い。
【0034】
上述の方角指示器10及び基準位置標示器20は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0035】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0036】
1…経路案内装置 10…方角指示器 11…GPS部 12…地図情報記憶部 13…分岐路検索部 14…方角受信部 15…分岐路選択部 16…経路探索部 17…出力制御部 18…震動部 19…位置センサ発信器 20…基準位置標示器 21…位置センサ受信器 22…方角検出部 23…方角算出部 24…方角送信部
【技術分野】
【0001】
本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置、経路案内方法、方角指示器、基準位置標示器及びプログラムに関する。
【背景技術】
【0002】
近年、GPS(Global Positioning System)による位置検出機能を有し、目的地までの経路を表示する経路案内装置(例えば、カーナビゲーションシステムや、携帯電話端末の経路案内アプリケーションなど)が普及している。しかしながら、従来の経路案内装置が表示する地図を参照しても、目印となる建造物がなく、地図上に表示された経路のみではどの方向に進めばよいか判断しづらいという問題がある。
近年では、これらの課題に鑑み、地図表示によらない経路案内方法が提案されている。
【0003】
特許文献1には、経路案内装置の方向が正しい案内方角を向いているときに、当該経路案内装置の振動を大きくし、誤った方向を向いているときに振動を小さくする技術が開示されている。これにより、利用者は、複数の分岐路が交差する分岐点において、経路案内装置を分岐路の進行方角へ向けることで、何れの分岐路が正しい案内方角であるかを認識することができる。
なお、本明細書では、「方向」を、前後左右上下のような観測者によって変化する相対的な向きのことを示すものと定義し、「方角」を、東西南北天地のような観測者によって変化しない絶対的な向きのことを示すものと定義する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−221277号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1に記載の経路案内装置は、方位センサが北方向と自装置の所定の基準方向とがなす角の角度を算出し、当該角度に基づいて進行方角を判定する。そのため、利用者は、常に経路案内装置の基準方向を進行方角に向ける必要があり、利用者が経路案内装置を把持する方向と経路案内装置の基準方向とにズレがあった場合、正しく経路案内がなされないという問題があった。特に、経路案内装置がディスプレイを有さない場合、何れの方向が経路案内装置の基準方向であるかを見極めることが困難となる。
【0006】
本発明は、上記の問題に鑑みてなされたものであり、利用者によって把持される方向によらずに正しく経路案内を行う経路案内装置、経路案内方法、進行方角指示器、基準位置標示器及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は上記の課題を解決するためになされたものであり、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置であって、前記各分岐路の方角を入力する分岐路情報入力部と、案内する方角を入力する案内方角情報入力部と、前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択する分岐路選択部と、前記利用者に刺激を与える刺激部と、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部とを備えることを特徴とする。
【0008】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を用いた経路案内方法であって、分岐路情報入力部は、前記各分岐路の方角を入力し、案内方角情報入力部は、案内する方角を入力し、方角算出部は、前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出し、分岐路選択部は、前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択し、出力制御部は、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて利用者に刺激を与える刺激部による刺激の有無を制御することを特徴とする。
【0009】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器であって、前記各分岐路の方角を入力する分岐路情報入力部と、案内する方角を入力する案内方角情報入力部と、前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部と、前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部と、前記利用者に刺激を与える刺激部と、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部とを備えることを特徴とする。
【0010】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器であって、自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、前記方角算出部が算出した方角を前記方角指示器に送信する送信部とを備えることを特徴とする。
【0011】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器を、前記各分岐路の方角を入力する分岐路情報入力部、案内する方角を入力する案内方角情報入力部、前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部、前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて、利用者に刺激を与える刺激部による刺激の有無を制御する出力制御部として機能させるためのプログラムである。
【0012】
また、本発明は、複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器を、自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部、前記方角算出部が算出した方角を前記方角指示器に送信する送信部として機能させるためのプログラムである。
【発明の効果】
【0013】
本発明によれば、経路案内装置が進行方角を判定する基準方向は、基準位置標示器及び方角指示器の把持方向によらず、基準位置標示器から方角指示器へ伸びる半直線が示す方向となる。これにより、経路案内装置は、利用者によって把持される方向によらずに正しく経路案内を行うことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態による経路案内装置の構成及び動作を示す図である。
【図2】本発明の一実施形態による経路案内装置の構成を示す概略ブロック図である。
【図3】基準位置装置による方角の検出を示す概略ブロック図である。
【図4】経路案内装置の動作を示すシーケンス図である。
【図5】分岐路選択部が進行方向の分岐路を選択する動作を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
図1は、本発明の一実施形態による経路案内装置の構成及び動作を示す図である。
経路案内装置1は、方角指示器10と基準位置標示器20とを備える。方角指示器10と基準位置標示器20とは無線または有線で接続される。但し、有線で接続されている場合、方角指示器10と基準位置標示器20とは、可撓性の高い通信ケーブルで接続されているものとする。
方角指示器10は、GPS機能を有する携帯電話端末であって、利用者の手に把持され、利用者が進もうとする方角(以降、進行方角と呼ぶ)に向けられることで、利用者の進行方角を示す。なお、方角指示器10は、基準位置標示器20から進行方角を受信し、利用者を案内すべき方角(以降、案内方角と呼ぶ)と当該進行方角とが合致するときに振動する。
基準位置標示器20は、利用者の胴体に取り付けられることで、利用者の現在位置を示す。なお、基準位置標示器20は、自身から方角指示器10へ伸びる半直線が示す方角を算出し、当該方角を進行方角として方角指示器10に送信する。
【0016】
図2は、本発明の一実施形態による経路案内装置の構成を示す概略ブロック図である。
方角指示器10は、GPS部11、地図情報記憶部12、分岐路検索部13、方角受信部14、分岐路選択部15(分岐路情報入力部)、経路探索部16、出力制御部17(案内方角情報入力部)、震動部18、位置センサ発信器19を備える。
GPS部11は、GPS衛星から信号を受信し、自身の現在位置を測定する。
地図情報記憶部12は、道路情報を含む地図情報を記憶する。
分岐路検索部13は、GPS部11が測定する現在位置と、地図情報記憶部12が記憶する地図情報とに基づいて、現在位置に存在する分岐路を検索する。
方角受信部14は、基準位置標示器20から利用者の進行方角を受信する。
分岐路選択部15は、分岐路検索部13による検索結果として得られた分岐路の中から、方角受信部14が受信した進行方角に最も近い方角を有する分岐路を選択する。
経路探索部16は、利用者から目的地の入力を受け付け、GPS部11が測定する現在位置と地図情報記憶部12が記憶する地図情報とに基づいて目的地までの経路を探索し、利用者を案内すべき分岐路を決定する。
出力制御部17は、経路探索部16が決定した案内すべき分岐路と分岐路選択部15が選択した分岐路とが一致するか否かを判定し、一致する場合に震動部18を振動させる。
震動部18は、出力制御部17からの入力に基づいて振動する。
位置センサ発信器19は、超音波を発し、基準位置標示器20に自身の位置を通知する。
【0017】
図3は、基準位置装置による方角の検出を示す概略ブロック図である。
基準位置標示器20は、位置センサ受信器21、方角検出部22、方角算出部23、方角送信部24を備える。
位置センサ受信器21は、方角指示器10の位置センサ発信器19から超音波を受信し、自身の位置を基準点としたときの方角指示器10の位置を検出する。
方角検出部22は、図3(a)に示すように、内蔵する電子コンパスなどにより、基準位置標示器20の一端から他端へ向かう方向を基準方向として、北方向に対して当該基準方向が示す方角を検出する。なお、方角検出部22は、方角として自身から北方向へ伸びる半直線と、自身から基準方向へ伸びる半直線とがなす角の角度を出力する。
方角算出部23は、図3(b)に示すように、方角検出部22が検出した方角と位置センサ受信器21が検出した方角指示器10の位置とに基づいて、北方向に対して自身から方角指示器10へ伸びる半直線が示す方角を算出する。
方角送信部24は、方角算出部23が算出した方角を進行方角として方角指示器10に送信する。
【0018】
ここで、位置センサ発信器19と位置センサ受信器21によって、基準位置標示器の位置を基準点としたときの方角指示器10の位置が検出できる理由を説明する。
位置センサ受信器21は、1つの位置センサ発信器19に対して基準位置標示器20に3つ備えられる。そして、位置センサ受信器21の各々は、位置センサ発信器19から超音波が到達するまでの時間遅れを計測する。そして、位置センサ受信器21は、それぞれの時間遅れに基づいて三角測量を行うことで、位置センサ発信器19と位置センサ受信器21との位置関係を定めることができる。
【0019】
そして、このような構成を備えることで、経路案内装置1において、分岐路選択部15は、分岐路検索部13が検索した各分岐路の方角を入力し、出力制御部17は、経路探索部16が探索した案内方角を入力する。次に、方角算出部23は、利用者の現在位置を示す基準位置標示器20から利用者の進行方角を示す方角指示器10へ伸びる半直線が示す方角を算出し、分岐路選択部15は、分岐路検索部13から入力した方角のうち、方角算出部23が算出した方角に最も近似した方角を選択する。そして、出力制御部17は、分岐路選択部15が選択した方角と経路探索部16から入力した方角とが一致するか否かに基づいて震動部18の振動の有無を制御する。
これにより、経路案内装置1は、利用者によって把持される方向によらずに正しく経路案内を行う。
【0020】
次に、本実施形態による経路案内装置1の動作を説明する。
まず、利用者は、経路案内装置1による案内操作を行う前に、基準位置標示器20を胴体に取り付ける。そして、方角指示器10を手で把持する。そして、利用者は、方角指示器10の図示しない操作部を操作し、方角指示器10に経路案内アプリケーションを実行させる。
【0021】
図4は、経路案内装置の動作を示すシーケンス図である。
方角指示器10は、経路案内アプリケーションの実行を開始すると、経路探索部16は、図示しない操作部を介して利用者から目的地の入力を受け付ける(ステップS101)。次に、GPS部11は、GPS衛星から信号を受信し、現在位置の測定を行う(ステップS102)。次に、経路探索部16は、GPS部11が測定した現在位置と、地図情報記憶部12が記憶する地図情報とに基づいて、現在位置から目的地までの経路を探索する(ステップS103)。経路の探索方法は、ダイクストラ法などの経路探索法を用いて行うと良い。また、ダイクストラ法に限らず、他の経路探索法を用いて行っても良い。
【0022】
このとき、基準位置標示器20の位置センサ受信器21は、方角指示器10の位置センサ発信器19から発信される超音波を受信し、自身の位置を基準点としたときの方角指示器10の相対位置を検出する(ステップS201)。このとき、位置センサ受信器21は、基準位置標示器20の基準方向をX軸とし、当該X軸に直交するY軸及びZ軸からなり、基準位置標示器20の位置を原点とする座標系における、方角指示器10の位置を算出する。
また、方角検出部22は、内蔵する電子コンパスに基づいて、北方向に対して自身の基準方向が示す方角を検出する(ステップS202)。
【0023】
次に、方角算出部23は、位置センサ受信器21が検出した方角指示器10の相対位置と方角検出部22が検出した方角とに基づいて、自身から方角指示器10へ伸びる半直線が示す方角を算出する。すなわち、方角算出部23は、方角指示器10が示す方角を算出する(ステップS203)。具体的には、方角算出部23は、まず位置センサ受信器21が検出したXYZ座標系における方角指示器10の位置を、基準方向を示すX軸とX軸に対して水平方向に直行するY´軸とからなる二次元のXY´座標系に射影する。次に、方角算出部23は、原点から方角指示器10の位置へ伸びる半直線をXY´座標系に生成する。つまり、ここで生成した半直線は、基準方向に対する方角指示器10の位置する方角を示す。
他方、方角算出部23は、XY´座標系上に、原点を始点とし、X軸に対して方角検出部22が検出した方角が示す角度だけ傾けた半直線を生成する。つまり、ここで生成した半直線は、北方向を示す。
そして、方角算出部23は、北方向を示す半直線と基準方向に対する方角指示器10の位置する方角を示す半直線とがなす角の角度を、自身から方角指示器10へ伸びる半直線が示す方角として算出する。
【0024】
方角算出部23が、ステップS203で、自身から方角指示器10へ伸びる半直線が示す方角を算出すると、方角送信部24は、方角算出部23が算出した方角を示す情報を方角指示器10に送信する(ステップS204)。基準位置標示器20は、方角を示す情報の送信を終了すると、ステップS201に戻り、再度方角指示器10の位置検出を行なう。
【0025】
方角指示器10の方角受信部14は、基準位置標示器20から自身へ伸びる半直線が示す方角を示す情報を、基準位置標示器20から受信する(ステップS104)。方角受信部14が方角を示す情報を受信し、経路探索部16がステップS103による経路探索を完了すると、分岐路検索部13は、地図情報記憶部12が記憶する地図情報とGPS部11が測定した現在位置とに基づいて、現在位置に分岐路があるか否かを判定する(ステップS105)。
【0026】
分岐路検索部13が、現在位置に分岐路が無いと判定した場合(ステップS105:NO)、ステップS4に戻り、基準位置標示器20から次の方角の情報の受信を待機し、経路案内を継続する。他方、分岐路検索部13が、現在位置に分岐路があると判定した場合(ステップS105:YES)、分岐路検索部13は、地図情報記憶部12が記憶する地図情報から、現在位置に存在する各分岐路とその方角を読み出す(ステップS106)。
【0027】
図5は、分岐路選択部が進行方向の分岐路を選択する動作を示す図である。
次に、分岐路選択部15は、分岐路検索部13が読み出した各分岐路のうち、方角受信部14が受信した情報が示す方角に最も近似するものを進行方向の分岐路として選択する(ステップS107)。具体的には、分岐路選択部15は、図5に示すように、分岐路検索部13が読み出した各分岐路の方角と方角受信部14が受信した情報が示す方角とがなす角の角度を算出する。そして、分岐路選択部15は、算出した角度のうち最小の角度をなす分岐路を進行方向の分岐路として選択する。
【0028】
分岐路選択部15が進行方向の分岐路を選択すると、経路探索部16は、ステップS103で探索した経路とGPS部11が測定した現在位置とに基づいて、案内方角の分岐路を決定する(ステップS108)。次に、出力制御部17は、ステップS107で分岐路選択部15が選択した進行方向の分岐路と、ステップS108で決定した案内方角の分岐路とが一致するか否かを判定する(ステップS109)。
出力制御部17は、進行方向の分岐路と案内方角の分岐路とが一致すると判定した場合(ステップS109:YES)、震動部18に出力する発振信号をONに切り替え、方角指示器10を振動させる(ステップS110)。他方、出力制御部17は、進行方向の分岐路と案内方角の分岐路とが一致しないと判定した場合(ステップS109:NO)、震動部18に出力する発振信号をOFFに切り替え、方角指示器10の振動を停止させる(ステップS111)。
これにより、利用者は、方角指示器10を四方八方に動かし、向けたときに方角指示器10が震動する方向へ進むことで、目的地にたどり着くことができる。
【0029】
次に、経路探索部16は、ステップS103で探索した経路とステップS102でGPS部11が測定した現在位置とに基づいて、現在位置が目的地であるか否かを判定する(ステップS112)。経路探索部16は、現在位置が目的地であると判定した場合(ステップS112:YES)、経路案内装置1は、処理を終了する。
他方、経路探索部16は、現在位置が目的地でないと判定した場合(ステップS112:NO)、ステップS104に戻り、基準位置標示器20から方角を示す情報の受信し、経路案内を継続する。
【0030】
このように、本実施形態によれば、経路案内装置1が進行方角を判定する基準方向は、基準位置標示器20及び方角指示器10の把持方向によらず、基準位置標示器20から方角指示器10へ伸びる半直線が示す方向となる。これにより、経路案内装置1は、利用者によって把持される方向によらずに正しく経路案内を行うことができる。
【0031】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、基準位置標示器20が位置センサ受信器21、方角検出部22、及び方角算出部23を備え、基準位置標示器20が、方角指示器10が示す方角を算出する場合を説明したが、これに限られない。例えば、方角指示器10が位置センサ受信器21、方角検出部22、及び方角算出部23を備え、基準位置標示器20が位置センサ発信器19を備えることで、方角指示器10で方角指示器10が示す方角を算出しても良い。特にこの場合、方角指示器10と基準位置標示器20との間で通信を行う必要が無いため、方角受信部14及び方角送信部24を備えなくても良い。
【0032】
また、本実施形態では、進行方向と案内方角とが合致したときに方角指示器10を震動させ、進行方向と案内方角とが合致しないときに方角指示器10を震動させない場合を説明したが、これに限られない。
例えば、進行方向と案内方角とが合致したときに方角指示器10を震動させず、進行方向と案内方角とが合致しないときに方角指示器10を震動させるようにしても良い。
また、例えば、震動部18を基準位置標示器20に備え、進行方向と案内方角とが合致したときに基準位置標示器20を震動させ、進行方向と案内方角とが合致しないときに基準位置標示器20を震動させないようにしても良い。
また、例えば、震動部に変えて、発光部を備え、進行方向と案内方角とが合致したときに方角指示器10を発光させ、進行方向と案内方角とが合致しないときに方角指示器10を発光させないようにするなど、経路案内装置1は、利用者に震動以外(例えば、光、音声など)の刺激を与えても良い。
【0033】
また、本実施形態では、位置センサ受信器21が位置センサ発信器19により発せられる超音波に基づいて位置を検出する場合を説明したが、これに限られず、例えば電波の受信遅延や、ジャイロセンサと距離センサとの組み合わせなど、他の方法によって位置を検出しても良い。
【0034】
上述の方角指示器10及び基準位置標示器20は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0035】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0036】
1…経路案内装置 10…方角指示器 11…GPS部 12…地図情報記憶部 13…分岐路検索部 14…方角受信部 15…分岐路選択部 16…経路探索部 17…出力制御部 18…震動部 19…位置センサ発信器 20…基準位置標示器 21…位置センサ受信器 22…方角検出部 23…方角算出部 24…方角送信部
【特許請求の範囲】
【請求項1】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置であって、
前記各分岐路の方角を入力する分岐路情報入力部と、
案内する方角を入力する案内方角情報入力部と、
前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、
前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択する分岐路選択部と、
前記利用者に刺激を与える刺激部と、
前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部と
を備えることを特徴とする経路案内装置。
【請求項2】
前記基準位置標示器は、
自身の位置を基準点としたときの前記方角指示器の位置を検出する位置センサと、
自装置の所定の基準方向が示す方角を検出する方角検出部と、
前記方角算出部と
を備え、
前記方角算出部は、前記方角検出部が検出した方角と前記位置センサが検出した前記方角指示器の位置とに基づいて、自身から前記方角指示器へ伸びる半直線が示す方角を算出する
ことを特徴とする請求項1に記載の経路案内装置。
【請求項3】
前記方角指示器は、
前記分岐路情報入力部、前記案内方角情報入力部、前記分岐路選択部、前記震動部及び前記出力制御部を備える
ことを特徴とする請求項1または請求項2に記載の経路案内装置。
【請求項4】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を用いた経路案内方法であって、
分岐路情報入力部は、前記各分岐路の方角を入力し、
案内方角情報入力部は、案内する方角を入力し、
方角算出部は、前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出し、
分岐路選択部は、前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択し、
出力制御部は、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて利用者に刺激を与える刺激部による刺激の有無を制御する
ことを特徴とする経路案内方法。
【請求項5】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器であって、
前記各分岐路の方角を入力する分岐路情報入力部と、
案内する方角を入力する案内方角情報入力部と、
前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部と、
前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部と、
前記利用者に刺激を与える刺激部と、
前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部と
を備えることを特徴とする進行方角指示器。
【請求項6】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器であって、
自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、
前記方角算出部が算出した方角を前記方角指示器に送信する送信部と
を備えることを特徴とする基準位置標示器。
【請求項7】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器を、
前記各分岐路の方角を入力する分岐路情報入力部、
案内する方角を入力する案内方角情報入力部、
前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部、
前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部、
前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて、利用者に刺激を与える刺激部による刺激の有無を制御する出力制御部
として機能させるためのプログラム。
【請求項8】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器を、
自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部、
前記方角算出部が算出した方角を前記方角指示器に送信する送信部
として機能させるためのプログラム。
【請求項1】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置であって、
前記各分岐路の方角を入力する分岐路情報入力部と、
案内する方角を入力する案内方角情報入力部と、
前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、
前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択する分岐路選択部と、
前記利用者に刺激を与える刺激部と、
前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部と
を備えることを特徴とする経路案内装置。
【請求項2】
前記基準位置標示器は、
自身の位置を基準点としたときの前記方角指示器の位置を検出する位置センサと、
自装置の所定の基準方向が示す方角を検出する方角検出部と、
前記方角算出部と
を備え、
前記方角算出部は、前記方角検出部が検出した方角と前記位置センサが検出した前記方角指示器の位置とに基づいて、自身から前記方角指示器へ伸びる半直線が示す方角を算出する
ことを特徴とする請求項1に記載の経路案内装置。
【請求項3】
前記方角指示器は、
前記分岐路情報入力部、前記案内方角情報入力部、前記分岐路選択部、前記震動部及び前記出力制御部を備える
ことを特徴とする請求項1または請求項2に記載の経路案内装置。
【請求項4】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を用いた経路案内方法であって、
分岐路情報入力部は、前記各分岐路の方角を入力し、
案内方角情報入力部は、案内する方角を入力し、
方角算出部は、前記利用者の現在位置を示す基準位置標示器から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出し、
分岐路選択部は、前記分岐路情報入力部が入力した方角のうち、前記方角算出部が算出した方角に最も近似した方角を選択し、
出力制御部は、前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて利用者に刺激を与える刺激部による刺激の有無を制御する
ことを特徴とする経路案内方法。
【請求項5】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器であって、
前記各分岐路の方角を入力する分岐路情報入力部と、
案内する方角を入力する案内方角情報入力部と、
前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部と、
前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部と、
前記利用者に刺激を与える刺激部と、
前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて前記刺激部による刺激の有無を制御する出力制御部と
を備えることを特徴とする進行方角指示器。
【請求項6】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器であって、
自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部と、
前記方角算出部が算出した方角を前記方角指示器に送信する送信部と
を備えることを特徴とする基準位置標示器。
【請求項7】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する方角指示器を、
前記各分岐路の方角を入力する分岐路情報入力部、
案内する方角を入力する案内方角情報入力部、
前記利用者の現在位置を示す基準位置標示器から自身へ伸びる半直線が示す方角を表す情報を、前記基準位置標示器から受信する受信部、
前記分岐路情報入力部が入力した方角のうち、前記受信部が受信した情報が表す方角に最も近似した方角を選択する分岐路選択部、
前記分岐路選択部が選択した方角と前記案内方角情報入力部が入力した方角とが一致するか否かに基づいて、利用者に刺激を与える刺激部による刺激の有無を制御する出力制御部
として機能させるためのプログラム。
【請求項8】
複数の分岐路が交差する分岐点において、利用者を正しい分岐路に案内する経路案内装置を構成する基準位置標示器を、
自身から前記利用者の進行方角を示す方角指示器へ伸びる半直線が示す方角を算出する方角算出部、
前記方角算出部が算出した方角を前記方角指示器に送信する送信部
として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−179961(P2011−179961A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−44320(P2010−44320)
【出願日】平成22年3月1日(2010.3.1)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月1日(2010.3.1)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]