
経路案内装置、経路案内方法及び経路案内プログラム
【課題】案内経路上で複数の部分が近接している箇所を通行するときのルートマッチング精度を向上させる。
【解決手段】経路案内装置は、経路探索サーバから経路データを取得する手段と、経路案内装置の現在位置を測位する手段と、測位位置を経路上の所定の位置に補正する手段と、補正位置に基づいて経路案内を行う手段と、測位位置及び/又は補正位置に基づいて経路案内装置の予測速度を計算する手段と、計算した予測速度で経路案内装置が経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する計算手段と、最新補正位置に対応する測位時刻から所定時間経過後に測位された対象測位位置が予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、対象測位位置に対する補正を行わないように補正手段を制御する制御手段と、を有する。
【解決手段】経路案内装置は、経路探索サーバから経路データを取得する手段と、経路案内装置の現在位置を測位する手段と、測位位置を経路上の所定の位置に補正する手段と、補正位置に基づいて経路案内を行う手段と、測位位置及び/又は補正位置に基づいて経路案内装置の予測速度を計算する手段と、計算した予測速度で経路案内装置が経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する計算手段と、最新補正位置に対応する測位時刻から所定時間経過後に測位された対象測位位置が予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、対象測位位置に対する補正を行わないように補正手段を制御する制御手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、利用者に現在地から目的地までの経路を案内する経路案内装置、経路案内方法及び経路案内プログラムに関する。
【背景技術】
【0002】
近年、携帯電話機、PHS(Personal Handyphone System)等の携帯端末装置の性能は飛躍的に向上し、かつ多機能化が進んでいる。特に通話機能の他にデータ通信機能が強化され、ユーザに対してインターネットを介した種々のデータ通信サービスが提供されている。ナビゲーションサービスもその1つであり、携帯電話機のユーザに対して、現在地から目的地までの経路案内を提供するサービスが実施されている。
【0003】
このような携帯電話機に対するナビゲーションサービスに関する技術としては、特許文献1に記載されたナビゲーションシステムがある。このナビゲーションシステムは、GPS(Global Positioning System)受信部とGPS制御部及びGPSアンテナを携帯電話機に内蔵したGPS機能付き携帯電話機にて複数のGPS衛星から送信されるGPS信号を受信する手段と、該複数のGPS信号に含まれる衛星位置や衛星受信機間距離情報及び時計情報等を解析して得られた位置情報と当該GPS機能付き携帯電話機の電話番号及び探索情報等のデータをパケット送信する手段と、該データを受信して当該GPS機能付き携帯電話機及び目的地の位置を検出し適正尺度の地図情報やルート情報及び距離等の地図データを当該GPS機能付き携帯電話機に送信することができる手段を有した地図サービスセンタを配設したものである。
【0004】
ところで、前述の携帯電話機を利用したナビゲーションシステムや通常のカーナビゲーション装置においては、移動中の装置の現在位置の測位データには誤差が含まれているため、測位した現在位置を地図の道路上、或いは案内経路上に修正する処理が行われる。一般的には前者をマップマッチング処理、後者をルートマッチング処理と言う。
【0005】
ルートマッチング処理については、例えば特許文献2に開示されている。特許文献2は通信型ナビゲーション装置に関するものであり、車両に搭載されたナビゲーション装置において、測位した車両の位置が案内経路(ルート)からずれた場合に、最も近い案内経路を検出して車両の現在位置をその案内経路上に修正する。なお、GPSの最大誤差を考慮して、測位した車両の位置が案内経路から200m以上離れた場合は当該修正を行わないようにしている。
【0006】
しかしながら、特許文献2に記載されたルートマッチング処理の場合、案内経路上で複数の部分が近接している箇所を通行する場合に、ミスマッチングを起こすことがある。
【0007】
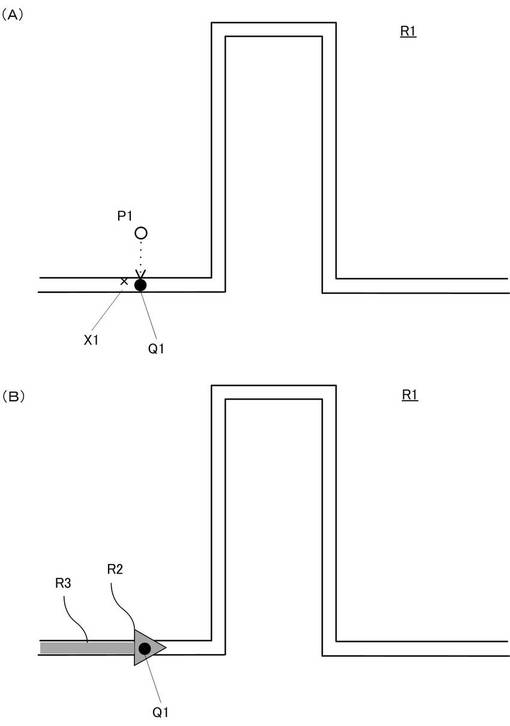
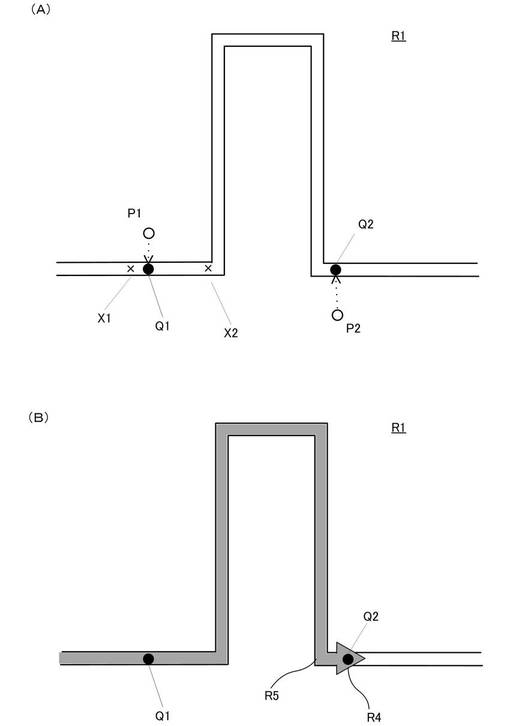
このことについて、図7及び図8を用いて説明する。図7(A)は、案内経路上の道路の一部が互いに近接する場合の一例を示している。ここでは、道路R1が略Ω型状であり、複数の部分R11、R12、R13及びR14が近接している。車両は、道路R1を地点A1から地点A2へ向かって走行しており、X1は車両の実際の位置、P1はGPSによる測位位置を示している。測位位置P1は案内経路からずれているが当該経路との距離は200m以内であるため、ルートマッチング処理により案内経路上の最も近い位置Q1に修正される。そして、ナビゲーション装置のディスプレイには、図7(B)に示すように、位置Q1を基準に現在位置ポインタR2及び走行軌跡R3が表示される。
【0008】
図8(A)は、車両がX1からX2へ移動した場合のルートマッチングについて示している。車両の実際の位置はX2、測位位置はP2である。測位位置P2もまた案内経路からずれているが当該経路との距離は200m以内であるため、ルートマッチング処理により当該位置に最も近い案内経路上の位置Q2に修正される。この結果、ナビゲーション装置のディスプレイには、図8(B)に示すように位置Q2を基準に現在位置ポインタR4及び走行軌跡R5が表示され、設定した最大誤差(例えば、200m)以上にわたって車両が未だ通過していない経路を既に通過してしまったことになるためナビゲーションの案内機能が低下するという問題がある。なお、このようなミスマッチングは、案内経路上の道路が略Ω型状である場合に限られず、例えば立体交差部などのように複数の部分が互いに近接する箇所であれば起こる可能性がある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2003−28662号公報
【特許文献2】特開2002−310961号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、このような問題を解決するためになされたものであり、その目的は、案内経路上で複数の部分が近接している箇所を移動対象が通行するときのルートマッチング精度を向上させることである。
【課題を解決するための手段】
【0011】
本発明は、経路探索サーバとネットワークを介して接続された経路案内装置であって、前記経路探索サーバから経路データを取得する取得手段と、前記経路案内装置の現在位置を測位する測位手段と、前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正手段と、前記補正した補正位置に基づいて経路案内を行う経路案内手段と、前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算手段と、前記計算した予測速度で前記経路案内装置が前記経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する予測移動距離計算手段と、前記最新補正位置に対応する測位時刻から前記所定時間経過後に測位された対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように前記補正手段を制御する制御手段と、を有することを特徴とする。
【0012】
前記制御手段は、前記経路案内装置が前記経路上を前記予測移動距離分だけ移動した場合の予測移動軌跡を特定し、当該特定した予測移動軌跡を含む予測測位範囲内に前記対象測位位置が含まれるか否かを判定条件として判定することを特徴とする。
【0013】
前記予測速度計算手段は、前記予測速度計算手段は、第1補正位置と第2補正位置の差分と当該第1補正位置に対応する第1測位時刻から当該第2補正位置に対応する第2測位時刻への経過時間とを用いて前記通信端末の第1予測速度を計算する第1予測速度計算手段、前記対象測位位置と最新補正位置の差分と当該対象測位位置の測位時刻から当該最新補正位置に対応する測位時刻への経過時間とを用いて前記通信端末の第2予測速度を計算する第2予測速度計算手段、及び、所定期間における前記経路案内装置の平均速度を第3予測速度として計算する第3予測速度計算手段のうちの少なくとも1の計算手段を使用して前記予測速度を計算することを特徴とする。
【0014】
前記予測速度計算手段は、今回計算した予測速度と前回計算した予測速度との差分を当該今回計算した予測速度に加算することを特徴とする。
【0015】
前記予測移動距離計算手段は、前記計算した予測移動距離に対して、連続して前記補正を行わなかった回数に応じて大きくなるように計算される補正距離を加算することを特徴とする。
【0016】
前記予測移動距離計算手段は、所定距離値に前記補正を行わなかった回数を乗算することにより前記補正距離を計算することを特徴とする。
【0017】
また、本発明は、経路探索サーバとネットワークを介して接続される経路案内装置において経路を案内する経路案内方法であって、前記経路探索サーバから経路データを取得する取得ステップと、前記経路案内装置の現在位置を測位する測位ステップと、前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正ステップと、前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算ステップと、前記計算した予測速度と所定の移動時間とに基づいて前記経路案内装置の予測移動距離を計算する予測移動距離計算ステップと、対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように制御する制御ステップと、を有することを特徴とする。
【0018】
また、本発明は、上記各ステップをコンピュータに実行させるためのプログラムとしても成立する。このプログラムは、CD−ROM等の光学ディスク、磁気ディスク、半導体メモリなどの各種の記録媒体を通じて、又は通信ネットワークなどを介してダウンロードすることにより、コンピュータにインストール又はロードすることができる。
【0019】
また、本明細書等において、手段とは、単に物理的手段を意味するものではなく、その手段が有する機能をソフトウェアによって実現する場合も含む。また、1つの手段が有する機能が2つ以上の物理的手段により実現されても、2つ以上の手段の機能が1つの物理的手段により実現されてもよい。
【発明の効果】
【0020】
本発明によれば、案内経路上で複数の部分が近接している箇所を移動対象が通行するときのルートマッチング精度が向上する。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態の経路案内システムを示す図である。
【図2】経路探索処理のフローチャートである。
【図3】経路案内処理のフローチャートである。
【図4】ルートマッチング処理のフローチャートである。
【図5】本発明の実施形態におけるルートマッチングを示す図である。
【図6】本発明の他の実施形態におけるルートマッチングを示す図である。
【図7】従来のルートマッチングの一例を示す図である。
【図8】従来のルートマッチングの他の例を示す図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について図面を参照して詳細に説明する。なお、本実施形態では、案内経路上で複数の部分が近接している箇所を通行する場合の例として、道路が略Ω型状である場合について説明するが、本発明はこれに限られず、例えば、道路がループ形状である場合などにも適用することができる。
【0023】
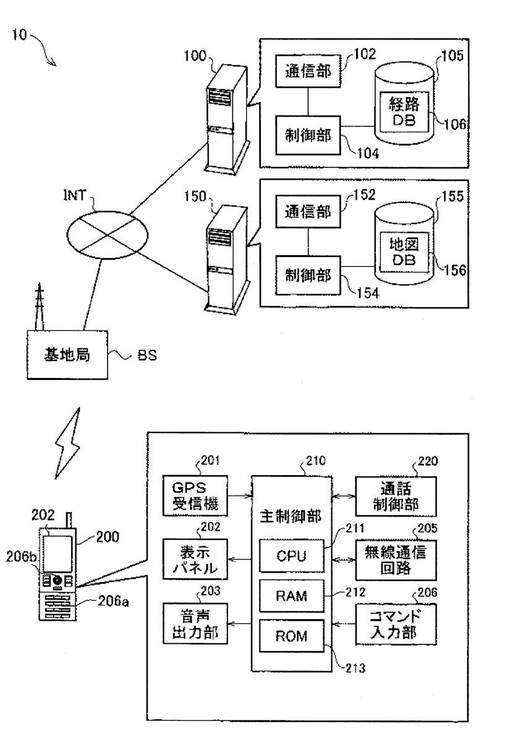
本発明の実施形態の経路案内システムは、図1に示すように、経路探索サーバ100と、地図サーバ150と、経路案内装置としての携帯電話機200とを含んでいる。携帯電話機200は、人が携帯する場合には歩行者用ナビゲーション装置として機能し、車両に搭載した場合には、カーナビゲーション装置として機能する。
【0024】
携帯電話機200は、GPS受信機201と、表示パネル202と、音声出力部203と、無線通信回路205と、コマンド入力部206と、主制御部210と、通話制御部220とを備えている。
【0025】
主制御部210は、携帯電話機200の各部を制御するためのコントローラである。主制御部210は、CPU(Central Processing Unit)211と、RAM(Random Access Memory)212と、ROM(Read Only Memory)213とを備えている。CPU211は、ROM213に記憶された制御プログラムをRAM212にロードして実行することで、後述する種々の処理を実現する。
【0026】
GPS受信機201は、GPS衛星から送信された電波を受信する装置である。主制御部210は、GPS受信機201が受信した電波に基づき現在位置を測位(検出)する。主制御部210は、GPS受信機201が、3つの衛星から電波を受信することができれば、2次元的な現在位置を測位することができ、4つの衛星から電波を受信することができれば、3次元的な現在位置を測位することができる。また、5つ以上の衛星から電波を受信することができれば、高精度に現在位置を測位することができる。
【0027】
表示パネル202は、液晶ディスプレイとこれを駆動する駆動回路とを備えている。主制御部210は、表示パネル202を制御することで、地図画像や推奨経路、現在位置などを表示する。表示パネル202には、液晶ディスプレイに限らず、有機ELディスプレイなど、種々の表示デバイスを採用することができる。
【0028】
音声出力部203は、経路案内時に音声を出力するためのスピーカや、これを駆動する回路などから構成される。
【0029】
無線通信回路205は、基地局BSとの間でデータ通信もしくは音声通信を行うための回路である。基地局BSには、例えばインターネットINTを介して経路探索サーバ100や地図サーバ150が接続されている。無線通信回路205は、基地局BSを介して、経路探索サーバ100や地図サーバ150にアクセスすることができる。
【0030】
通話制御部220は、音声通話のための着信や呼出、音声信号と電気信号の変換などを行う回路である。
【0031】
コマンド入力部206は、テンキー206aやカーソルキー206bなどのボタン群から構成される。ユーザは、これらのボタンを用いることで、経路探索に用いられる出発地や目的地などの入力を行うことができる。
【0032】
地図サーバ150は、通信部152と、制御部154と、記憶装置155とを備えている。記憶装置155には、地図データベース156が格納されている。通信部152は、インターネットINTを介して携帯電話機200と通信を行うことができる。地図データベース156には、携帯電話機200に供給する地図データが例えばベクトル形式で記録されている。この地図データには、地形や建物、道路等の形状を表すデータが含まれている。制御部154は、携帯電話機200から地図データの取得要求があると、指定された範囲の地図データを地図データベース156から検索し、通信部152を介して携帯電話機200へ送信する。
【0033】
経路探索サーバ100は、通信部102と、制御部104と、記憶装置105とを備えている。通信部102は、インターネットINTを介して携帯電話機200と通信を行うことができる。記憶装置105には、道路のつながり状態が記録された経路データベース106が記憶されている。道路のつながり状態は、交差点や分岐点等を表すノードデータと、ノードデータを結ぶ線分によって道路を表すリンクデータとによって表されている。経路探索サーバ100は、携帯電話機200から経路探索要求があると、経路データベース106を用いて、指定された出発地と目的地とを結ぶ推奨経路を探索する。そして、探索の結果、得られた推奨経路データ(以下、「経路データ」と言う)を、通信部102を介して携帯電話機200へ送信する。
【0034】
本実施形態では、経路データは、推奨経路(以下、「経路」と言う)を複数の区間に分割した分割位置を示す位置データを経路の並び順に配置したものである。即ち現在位置の緯度、経度を(X0、Y0)、目的地の緯度、経度を(Xn、Yn)とし、現在地から目的地に向けて経路をn個の区間に分割する位置(X1、Y1)〜(Xn−1、Yn−1)を定め、それらの順番に並べた形式(X0、Y0、X1、Y1、X2、Y2、・・・Xn−1、Yn−1、Xn、Yn)とすることができる。
【0035】
本実施形態では、経路探索サーバ100の制御部104は、自己の記憶装置105に記憶された経路データベース106を用いて経路探索を行う。しかし、経路データベース106が地図サーバ150に記憶されている場合には、インターネットINT経由で、この経路データベース106を読み込んで利用してもよい。なお、経路探索サーバ100と地図サーバ150は、一体のサーバとして構成することもできる。また、携帯電話機200の代わりに、通信機能及び画像表示機能を有する他の携帯端末装置(PDA:Personal Digital Assistant)などを用いることもできる。
【0036】
〈経路探索処理〉
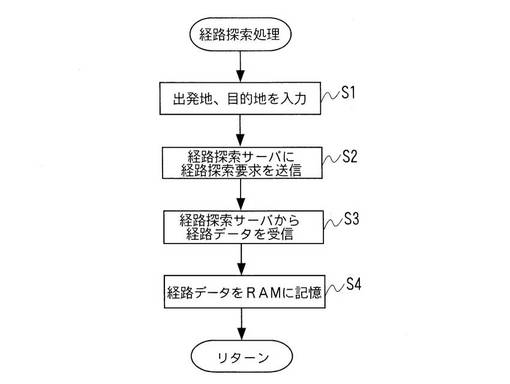
図2は、携帯電話機200の主制御部210が実行する経路探索処理のフローチャートである。この処理は、ユーザが、コマンド入力部206を用いて、携帯電話機200の経路案内機能を呼び出した場合に実行される。また、ここでは、経路上を移動する移動対象が車両である場合について説明する。
【0037】
経路探索処理が開始されると、まず、主制御部210は、コマンド入力部206を介して、ユーザから、出発地、目的地等の入力を受け付ける(ステップS1)。出発地は、GPS受信機201により測位された現在位置とすることができる。これらの入力を受け付けると、主制御部210は、無線通信回路205を用いて、経路探索サーバ100へ、経路探索の要求信号を送信する(ステップS2)。この要求信号には、ステップS1で入力された情報が含まれている。
【0038】
経路探索サーバ100は、携帯電話機200から経路探索の要求信号を受信すると、記憶装置105に記憶された経路データベース106を参照して、要求信号に含まれる出発地と目的地とを結ぶ(経由地が設定されていれば経由地を含む)経路を算出する。経路の算出は、例えば周知のダイクストラ法を用いて行う。経路探索サーバ100は、携帯電話機200から取得した出発地或いは目的地の緯度及び経度が、経路データベース106に記録された経路上にない場合には、周知のマップマッチング処理を行うことで、その地点に最も近い道路上の地点を、出発地或いは目的地とする。経路探索サーバ100は、経路を算出すると、前述した経路データを携帯電話機200へ返信する。
【0039】
携帯電話機200の主制御部210は、経路探索サーバ100から経路データを受信すると(ステップS3)、その経路データをRAM212に記憶する(ステップS4)。RAM212に記憶された経路データは、後述する地図表示処理において、表示パネル202上に表示される。なお、経路探索サーバ100から携帯電話機200に送信される経路データには、経路の種別(高速道路、一般道、歩道、線路等)や、案内表示を行うべき交差点や分岐点の緯度、経度を示す位置情報、案内表示時に画面に表示すべき画像データを含めてもよい。案内表示時に画面に表示すべき画像データとしては、例えば、交差点や分岐点における道路の詳細な接続状態を表す画像データや、インターチェンジやランプの案内板を模した画像データなどがある。
【0040】
〈経路案内処理〉
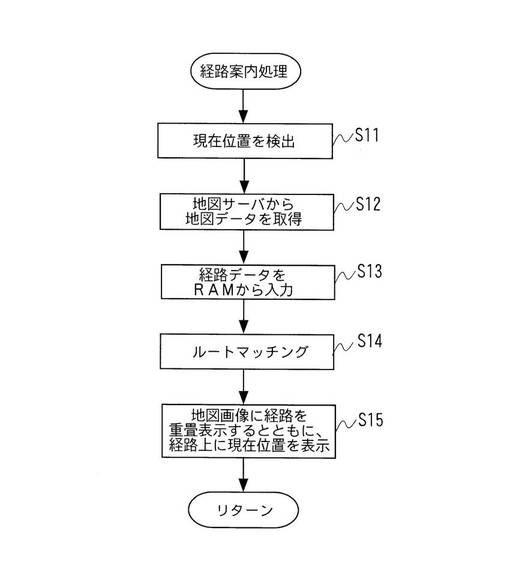
図3は、図2に示した経路探索処理に続いて実行される経路案内処理のフローチャートである。本実施形態では、携帯電話機200の主制御部210は、この処理を所定時間間隔(例えば、1秒に1回)にて実行する。なお、後述の各処理ステップは、処理内容に矛盾を生じない範囲で、任意に順番を変更して又は並列に実行することができるとともに、各処理ステップ間に他のステップを追加してもよい。また、便宜上1ステップとして記載されているステップは、複数ステップに分けて実行することができる一方、便宜上複数ステップに分けて記載されているものは、1ステップとして把握することができる。
【0041】
この経路案内処理が実行されると、まず、主制御部210は、GPS受信機201を用いて現在位置を測位し、測位結果をRAM212に記憶する(ステップS11)。次いで、主制御部210は、測位位置すなわち測位された緯度、経度を含む所定の範囲(例えば、500m四方)の地図データを地図サーバ150から取得する(ステップS12)。測位位置周辺の地図データがRAM212にバッファリングされている場合には、主制御部210は、バッファリングされているデータの中から、測位位置に対応する地図データを取得する。取得する地図データの範囲は、ユーザが設定した地図の表示スケールに合わせて調整することができる。
【0042】
地図データを取得すると、主制御部210は、RAM212から経路データを入力する(ステップS13)。この経路データは、図2に示した経路探索処理のステップS3で経路探索サーバ100から受信したデータである。なお、経路データを、図2のステップS3で受信する代わりに、地図データと同様に、測位位置から所定範囲内のものを図3の経路案内処理の中(ステップS11以後〜S13以前)で受信するように構成してもよい。
【0043】
続いて、ステップS11で測位した測位位置と、ステップS13で入力した経路データとを用いて、判定機能付きルートマッチング処理を行う(ステップS14)。なお、判定機能付きルートマッチング処理には、測位位置をルート上の所定の位置に補正する補正処理(ルートマッチング処理ともいう)と、補正処理を実行するか否かを判定する判定処理とが含まれる。補正処理には、例えば、測位位置の座標と経路データとを比較し、測位位置の座標に最も近い経路上の位置座標を特定すると、測位位置の座標を当該特定した経路上の位置座標に補正するなど周知の補正技術を利用することができる。補正後の位置座標は所定の記憶領域にルートマッチ情報として記憶される。なお、判定処理の詳細については後述する。
【0044】
次に、主制御部210は、ステップS12で取得したベクトル形式の地図データにより地図を描画し、ステップS13で入力した経路データにより経路を描画し、地図上に経路を重畳して表示パネル202に表示する。さらに、ステップS14で行った判定機能付きルートマッチング処理の結果に基づいて、車両の現在位置を示す現在位置マーク及び走行軌跡を重畳することにより経路案内表示を行う。
【0045】
〈ルートマッチング処理〉
図4は、図3の判定機能付きルートマッチング処理のフローチャートである。なお、図3のステップS11にて測位した最新の測位情報(測位位置及び測位時刻を含む)を、以下「対象測位情報」といい、これにより以前の測位情報についてはルートマッチング処理が行われ、そのルートマッチ情報が所定の記憶領域に格納されているものとする。
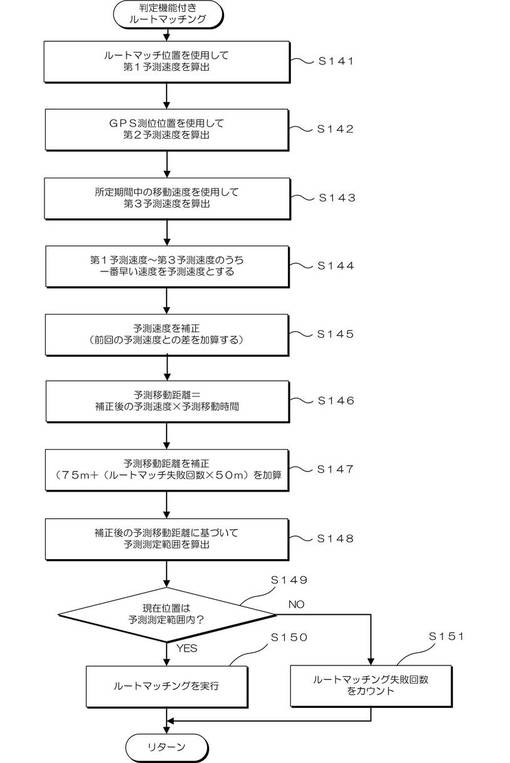
【0046】
まず、主制御部210は、所定の記憶領域に記憶されているルートマッチ情報を使用して車両の第1予測速度を算出する(S141)。ルートマッチ情報には、現時点迄にルートマッチングしたルートマッチ位置(補正位置の座標)、当該ルートマッチ前の測位位置及び測位時刻などが含まれる。主制御部210は、例えば、直近2つのルートマッチ情報の差分、すなわち、第1ルートマッチ位置と第2ルートマッチ位置との差分と、第2ルートマッチ位置に対応する測位時刻から第1ルートマッチ位置の測位時刻への経過時間とから、第1予測速度を算出することができる。
【0047】
次に、主制御部210は、GPS測位情報を使用して車両の第2予測速度を算出する(S142)。GPS測位情報には、GPS受信機201により測位された測位位置及び測位時刻などが含まれる。主制御部210は、例えば、今回測位された対象測位情報と現時点迄で最後に実行されたルートマッチングの情報(以下、「最新ルートマッチ情報」という。)との差分、すなわち、対象測位位置と最新ルートマッチ位置との差分と、最新ルートマッチ位置に対応する測位時刻から対象測位位置の測位時刻までの経過時間とに基づいて、第2予測速度を算出することができる。
【0048】
次に、主制御部210は、車両の所定期間中の平均速度を計算することにより車両の第3予測速度を算出する(S143)。所定期間中の平均速度は、例えばメディアンフィルターなどの従来技術を適用して算出することができる。平均速度の算出方法は、設計に応じて適宜設定することができるが、例えば、現時点から起算して30秒前を基準点とした場合の当該基準点より以前15秒おきに30秒、45秒、60秒、75秒、90秒の5つの点における速度を算出し、最大値及び最小値を除いた3つの値の平均を平均速度とすることができる。
【0049】
次に、主制御部210は、第1予測速度、第2予測速度及び第3予測速度の中から、所定条件に合致する速度を車両の予測速度として選択する(S144)。本実施形態では、最も速い速度を選択する。予測速度は、GPS受信機201の性能や測位状態などに応じて計算値が異なるところ、算出方法の異なる複数の予測速度から車両の予測速度を決定することにより、予測速度の精度を向上させることができる。なお、上記3つの予測速度については、設計に応じて内容の変更や削除が可能であり、例えば、いずれか1つの予測速度のみを使用してもよいし、また、他の算出方法で求めた予測速度を第4予測速度として追加してもよい。
【0050】
予測速度が算出されると、主制御部210は、予測速度の補正処理を実行する(S145)。実際の車両の速度は、GPSの測位間隔(例えば1秒)や処理時間等により発生する遅延のため、加速していれば計算値より速くなる一方、減速していれば計算値より遅くなる。よって、ここでは、今回計算した予測速度と前回計算した予測速度との差分(加速度)を今回計算した予測速度に加算する。これにより、遅延の影響を減少させることができる。
【0051】
次に、主制御部210は、補正後の予測速度で車両が経路上の最新ルートマッチ位置から所定の予測移動時間分移動した場合の予測移動距離を算出する(S146)。所定の予測移動時間は、設計に応じて適宜設定することができるが、例えば、最新ルートマッチ位置に対応する測位時刻から対象測位情報の測位時刻までの経過時間とすることができる。
【0052】
予測移動距離が算出されると、主制御部210は、予測移動距離を所定の補正距離によって補正する(S147)。所定の補正距離は、連続してルートマッチングが失敗した回数に応じて大きくなるように計算される。例えば、第1の所定距離(例:50m)にルートマッチングが失敗した回数を乗算し、その結果を第2の所定距離(例:75m)に加算した合計を補正距離とすることができる(式:補正距離=(第1所定距離×ルートマッチング失敗回数)+第2所定距離)。なお、第1及び第2所定距離は、GPSの性能や移動対象の種類を考慮して設定することができる。また、補正距離には、GPSの性能や移動対象の種類に応じた最大距離(例:車両の場合は200m)を設定することができる。
【0053】
次に、主制御部210は、補正後の予測移動距離に基づいて対象測位位置が予測される範囲(以下、「予測測位範囲」という。)を算出する。例えば、まず、最新ルートマッチ情報のルートマッチ位置を基準位置として、当該基準位置から車両が補正後の予測移動距離分だけ経路上を進行方向に移動した場合の位置(以下、「予測最大移動位置」という。)を特定する。そして、この基準位置から予測最大移動位置までの経路を「予測移動軌跡」として特定し、当該予測移動軌跡を含む一定の範囲を「予測測位範囲」として算出する。予測移動軌跡を基準とした予測測位範囲の算出条件は、設計に応じて適宜設定することができるが、ここでは、予測移動軌跡を対照軸とした場合の当該対照軸から所定距離内にある範囲を予測測位範囲とする。所定距離は、移動対象や道路の種類などに応じて設定することができ、例えば移動対象がユーザ歩行である場合は当該対照軸から75mずつ左右に拡張した範囲、移動対象が車両である場合は、一般道路では110mずつ、高速道路では300mずつ左右に拡張した範囲とすることができる。
【0054】
そして、主制御部210は、図3のステップS11で測位された対象測位位置が、予測測位範囲に含まれるか否かを判定する(S149)。そして、対象測位位置が予測測位範囲に含まれると判定した場合は、ルートマッチングを実行し、対象測位位置を経路上のルートマッチ位置に修正する。また、ルートマッチング情報を所定の記憶領域に格納する。一方、対象測位位置が予測測位範囲に含まれないと判定した場合は、ルートマッチングは実行せず、ルートマッチング失敗回数をカウントして所定の記憶領域に格納する。
【0055】
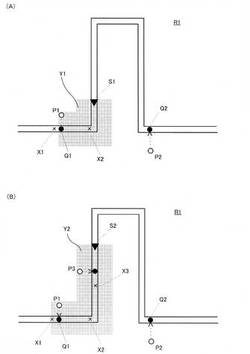
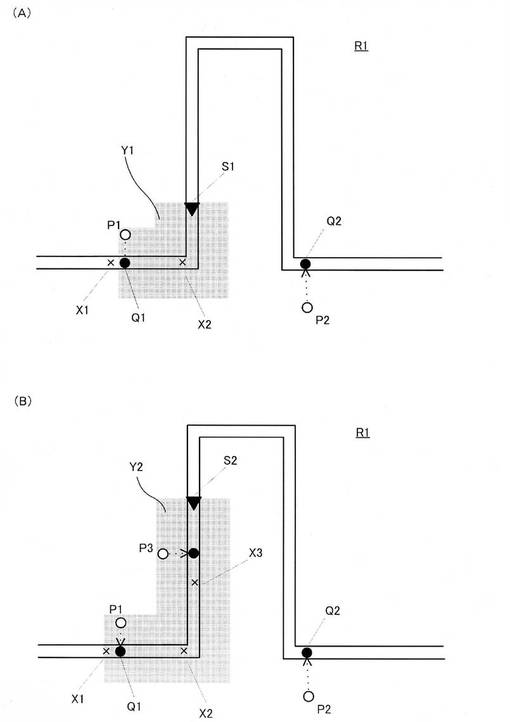
図5では、本実施形態のルートマッチングを説明するための図である。同図(A)では、Y1は、予測移動距離に基づいて設定された予測測位範囲である。予測測位範囲Y1は、最新ルートマッチ位置Q1から予測最大移動位置S1までの予測移動軌跡S11を基準に生成されている。ここで、測位位置P1の次に測位された測位位置P2は、予測測位範囲内Y1に位置していない。従って、主制御部210は、測位位置P2を経路上のルートマッチ位置Q2に修正するルートマッチングを実行せず、最新ルートマッチ位置はQ1のままである。
【0056】
一方、図5(B)は、測位位置P2の次に測位位置P3が測位された場合のルートマッチングを示す図である。測位位置P3の測位時点では、測位位置P2の測位時よりも時間が経過しているので予測移動距離が更新され、更新後の予測移動距離に基づいて予測最大移動位置S2、予測移動軌跡S12、予測測位範囲Y2が新たに設定されている。ここで、測位位置P3は、予測測位範囲Y2に含まれている。従って、主制御部210は、測位位置P3を経路上の最も近いルートマッチ位置Q3に修正するルートマッチングを実行する。これにより、ルートマッチ位置Q3が最新ルートマッチ位置となる。主制御部210は、ルートマッチングの実行によりルートマッチング失敗回数をクリアする。
【0057】
以上説明したように、本実施形態の経路案内システムによれば、GPS受信機201で検出した測位位置を経路上に修正するルートマッチングを行うときに、当該測位位置が予測走行距離に基づいて定まる予測測位範囲に含まれるか否かを判定し、判定結果が否である場合は当該測位位置についてルートマッチングを実行しない(経路上に修正しない)。これにより、移動対象が経路上で複数の部分が近接している箇所を通行するときのマッチング精度を向上させることが可能になる。
【0058】
〈その他の実施形態〉
本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において、他の様々な形で実施することができる。上記実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈されるものではない。
【0059】
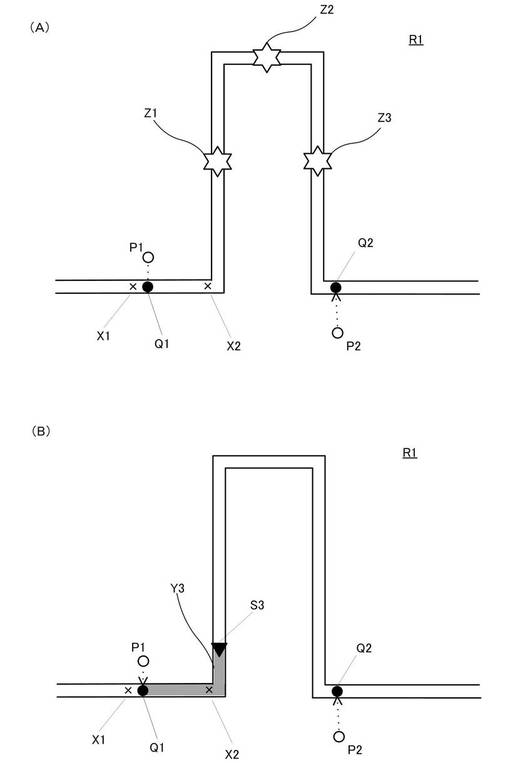
(1)ルートマッチングの判定条件の他の例として、案内経路上に複数の部分が近接している箇所が存在する場合は、移動対象が順番に通過すべき通過地点を予め経路データに設定しておき、移動対象が当該通過地点を通過したか否かに基づいて、ルートマッチングの実行の有無を決定するようにしてもよい。図6(A)は、案内経路上に設置された複数の通過地点Z1、Z2、Z3を示している。主制御部120は、例えば、通過地点毎に移動対象の通過の有無を示す通過情報を所定の記憶領域に保持している。GPS受信機により新しい測位位置が検出されると、主制御部120は、当該測位位置を経路上の仮ルートマッチ位置Q2にマッチングさせ、最新ルートマッチ位置Q1と仮ルートマッチ位置Q2との間に位置する通過地点(Z1、Z2、Z3)の通過情報のうち「未通過」を示すものが少なくとも2つ以上あるか否かを判定する。そして、判定結果が是である場合は仮ルートマッチ位置を消去し、判定結果が否である場合は仮ルートマッチ位置を確定させるようにしてもよい。
【0060】
(2)ルートマッチングの判定条件の他の例として、GPS受信機により新しい測位位置が検出されると、主制御部120は、当該測位位置を経路上の仮マッチング位にマッチングさせ、最新ルートマッチ位置から仮ルートマッチ位置まで経路上を移動した場合の移動距離が予測移動距離以内であるか否かを判定し、判定結果が是である場合は仮ルートマッチ位置を確定させ、判定結果が否である場合は仮ルートマッチ位置を消去するようにしてもよい。
【0061】
(3)ルートマッチングの判定条件の他の例として、図8(B)に示すように、GPS受信機により新しい測位位置が検出されると、主制御部120は、当該測位位置を経路上の仮ルートマッチ位置Q2にマッチングさせ、一方、最新のルートマッチ位置Q1から予測最大移動位置S3を結ぶ予測移動軌跡S31を設定する。そして、仮ルートマッチ位置Q2が予測移動軌跡Y3上に位置するか否かを判定し、判定結果が是である場合は仮ルートマッチ位置を確定させ、判定結果が否である場合は仮ルートマッチ位置を取り消すようにしてもよい。同図では、仮ルートマッチ位置Q2が予測移動軌跡Y3上に位置しないため、仮ルートマッチ位置Q2が取り消される。
【0062】
(4)経路上で複数の部分が近接している箇所を地図データ及び経路データを基に識別し、最新のルートマッチ位置が当該近接箇所の付近に存在する時のみ、マッチングの実行判定処理を実行するようにしてもよい。これによれば、ミスマッチングが起こり易い状況でのみ、ルートマッチングを実行するか否かの判定処理が実行されるので、マッチング処理を効率化することができる。
【0063】
(5)予測移動距離の補正処理において、補正距離の算出に使用するルートマッチング失敗回数には、最大値を設定することができる。そして、この最大値による補正距離(最大補正距離)に基づいて算出された対象予測範囲に、対象測位位置が所定回数以上連続して含まれなかった場合は、対象測位位置を経路上の最も近い位置に補正するようにルートマッチングを実行しても良い。
【符号の説明】
【0064】
10・・・経路案内システム、100・・・経路探索サーバ、150・・・地図サーバ、200・・・携帯電話機、201・・・GPS受信機、210・・・主制御部
【技術分野】
【0001】
本発明は、利用者に現在地から目的地までの経路を案内する経路案内装置、経路案内方法及び経路案内プログラムに関する。
【背景技術】
【0002】
近年、携帯電話機、PHS(Personal Handyphone System)等の携帯端末装置の性能は飛躍的に向上し、かつ多機能化が進んでいる。特に通話機能の他にデータ通信機能が強化され、ユーザに対してインターネットを介した種々のデータ通信サービスが提供されている。ナビゲーションサービスもその1つであり、携帯電話機のユーザに対して、現在地から目的地までの経路案内を提供するサービスが実施されている。
【0003】
このような携帯電話機に対するナビゲーションサービスに関する技術としては、特許文献1に記載されたナビゲーションシステムがある。このナビゲーションシステムは、GPS(Global Positioning System)受信部とGPS制御部及びGPSアンテナを携帯電話機に内蔵したGPS機能付き携帯電話機にて複数のGPS衛星から送信されるGPS信号を受信する手段と、該複数のGPS信号に含まれる衛星位置や衛星受信機間距離情報及び時計情報等を解析して得られた位置情報と当該GPS機能付き携帯電話機の電話番号及び探索情報等のデータをパケット送信する手段と、該データを受信して当該GPS機能付き携帯電話機及び目的地の位置を検出し適正尺度の地図情報やルート情報及び距離等の地図データを当該GPS機能付き携帯電話機に送信することができる手段を有した地図サービスセンタを配設したものである。
【0004】
ところで、前述の携帯電話機を利用したナビゲーションシステムや通常のカーナビゲーション装置においては、移動中の装置の現在位置の測位データには誤差が含まれているため、測位した現在位置を地図の道路上、或いは案内経路上に修正する処理が行われる。一般的には前者をマップマッチング処理、後者をルートマッチング処理と言う。
【0005】
ルートマッチング処理については、例えば特許文献2に開示されている。特許文献2は通信型ナビゲーション装置に関するものであり、車両に搭載されたナビゲーション装置において、測位した車両の位置が案内経路(ルート)からずれた場合に、最も近い案内経路を検出して車両の現在位置をその案内経路上に修正する。なお、GPSの最大誤差を考慮して、測位した車両の位置が案内経路から200m以上離れた場合は当該修正を行わないようにしている。
【0006】
しかしながら、特許文献2に記載されたルートマッチング処理の場合、案内経路上で複数の部分が近接している箇所を通行する場合に、ミスマッチングを起こすことがある。
【0007】
このことについて、図7及び図8を用いて説明する。図7(A)は、案内経路上の道路の一部が互いに近接する場合の一例を示している。ここでは、道路R1が略Ω型状であり、複数の部分R11、R12、R13及びR14が近接している。車両は、道路R1を地点A1から地点A2へ向かって走行しており、X1は車両の実際の位置、P1はGPSによる測位位置を示している。測位位置P1は案内経路からずれているが当該経路との距離は200m以内であるため、ルートマッチング処理により案内経路上の最も近い位置Q1に修正される。そして、ナビゲーション装置のディスプレイには、図7(B)に示すように、位置Q1を基準に現在位置ポインタR2及び走行軌跡R3が表示される。
【0008】
図8(A)は、車両がX1からX2へ移動した場合のルートマッチングについて示している。車両の実際の位置はX2、測位位置はP2である。測位位置P2もまた案内経路からずれているが当該経路との距離は200m以内であるため、ルートマッチング処理により当該位置に最も近い案内経路上の位置Q2に修正される。この結果、ナビゲーション装置のディスプレイには、図8(B)に示すように位置Q2を基準に現在位置ポインタR4及び走行軌跡R5が表示され、設定した最大誤差(例えば、200m)以上にわたって車両が未だ通過していない経路を既に通過してしまったことになるためナビゲーションの案内機能が低下するという問題がある。なお、このようなミスマッチングは、案内経路上の道路が略Ω型状である場合に限られず、例えば立体交差部などのように複数の部分が互いに近接する箇所であれば起こる可能性がある。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2003−28662号公報
【特許文献2】特開2002−310961号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、このような問題を解決するためになされたものであり、その目的は、案内経路上で複数の部分が近接している箇所を移動対象が通行するときのルートマッチング精度を向上させることである。
【課題を解決するための手段】
【0011】
本発明は、経路探索サーバとネットワークを介して接続された経路案内装置であって、前記経路探索サーバから経路データを取得する取得手段と、前記経路案内装置の現在位置を測位する測位手段と、前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正手段と、前記補正した補正位置に基づいて経路案内を行う経路案内手段と、前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算手段と、前記計算した予測速度で前記経路案内装置が前記経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する予測移動距離計算手段と、前記最新補正位置に対応する測位時刻から前記所定時間経過後に測位された対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように前記補正手段を制御する制御手段と、を有することを特徴とする。
【0012】
前記制御手段は、前記経路案内装置が前記経路上を前記予測移動距離分だけ移動した場合の予測移動軌跡を特定し、当該特定した予測移動軌跡を含む予測測位範囲内に前記対象測位位置が含まれるか否かを判定条件として判定することを特徴とする。
【0013】
前記予測速度計算手段は、前記予測速度計算手段は、第1補正位置と第2補正位置の差分と当該第1補正位置に対応する第1測位時刻から当該第2補正位置に対応する第2測位時刻への経過時間とを用いて前記通信端末の第1予測速度を計算する第1予測速度計算手段、前記対象測位位置と最新補正位置の差分と当該対象測位位置の測位時刻から当該最新補正位置に対応する測位時刻への経過時間とを用いて前記通信端末の第2予測速度を計算する第2予測速度計算手段、及び、所定期間における前記経路案内装置の平均速度を第3予測速度として計算する第3予測速度計算手段のうちの少なくとも1の計算手段を使用して前記予測速度を計算することを特徴とする。
【0014】
前記予測速度計算手段は、今回計算した予測速度と前回計算した予測速度との差分を当該今回計算した予測速度に加算することを特徴とする。
【0015】
前記予測移動距離計算手段は、前記計算した予測移動距離に対して、連続して前記補正を行わなかった回数に応じて大きくなるように計算される補正距離を加算することを特徴とする。
【0016】
前記予測移動距離計算手段は、所定距離値に前記補正を行わなかった回数を乗算することにより前記補正距離を計算することを特徴とする。
【0017】
また、本発明は、経路探索サーバとネットワークを介して接続される経路案内装置において経路を案内する経路案内方法であって、前記経路探索サーバから経路データを取得する取得ステップと、前記経路案内装置の現在位置を測位する測位ステップと、前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正ステップと、前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算ステップと、前記計算した予測速度と所定の移動時間とに基づいて前記経路案内装置の予測移動距離を計算する予測移動距離計算ステップと、対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように制御する制御ステップと、を有することを特徴とする。
【0018】
また、本発明は、上記各ステップをコンピュータに実行させるためのプログラムとしても成立する。このプログラムは、CD−ROM等の光学ディスク、磁気ディスク、半導体メモリなどの各種の記録媒体を通じて、又は通信ネットワークなどを介してダウンロードすることにより、コンピュータにインストール又はロードすることができる。
【0019】
また、本明細書等において、手段とは、単に物理的手段を意味するものではなく、その手段が有する機能をソフトウェアによって実現する場合も含む。また、1つの手段が有する機能が2つ以上の物理的手段により実現されても、2つ以上の手段の機能が1つの物理的手段により実現されてもよい。
【発明の効果】
【0020】
本発明によれば、案内経路上で複数の部分が近接している箇所を移動対象が通行するときのルートマッチング精度が向上する。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態の経路案内システムを示す図である。
【図2】経路探索処理のフローチャートである。
【図3】経路案内処理のフローチャートである。
【図4】ルートマッチング処理のフローチャートである。
【図5】本発明の実施形態におけるルートマッチングを示す図である。
【図6】本発明の他の実施形態におけるルートマッチングを示す図である。
【図7】従来のルートマッチングの一例を示す図である。
【図8】従来のルートマッチングの他の例を示す図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について図面を参照して詳細に説明する。なお、本実施形態では、案内経路上で複数の部分が近接している箇所を通行する場合の例として、道路が略Ω型状である場合について説明するが、本発明はこれに限られず、例えば、道路がループ形状である場合などにも適用することができる。
【0023】
本発明の実施形態の経路案内システムは、図1に示すように、経路探索サーバ100と、地図サーバ150と、経路案内装置としての携帯電話機200とを含んでいる。携帯電話機200は、人が携帯する場合には歩行者用ナビゲーション装置として機能し、車両に搭載した場合には、カーナビゲーション装置として機能する。
【0024】
携帯電話機200は、GPS受信機201と、表示パネル202と、音声出力部203と、無線通信回路205と、コマンド入力部206と、主制御部210と、通話制御部220とを備えている。
【0025】
主制御部210は、携帯電話機200の各部を制御するためのコントローラである。主制御部210は、CPU(Central Processing Unit)211と、RAM(Random Access Memory)212と、ROM(Read Only Memory)213とを備えている。CPU211は、ROM213に記憶された制御プログラムをRAM212にロードして実行することで、後述する種々の処理を実現する。
【0026】
GPS受信機201は、GPS衛星から送信された電波を受信する装置である。主制御部210は、GPS受信機201が受信した電波に基づき現在位置を測位(検出)する。主制御部210は、GPS受信機201が、3つの衛星から電波を受信することができれば、2次元的な現在位置を測位することができ、4つの衛星から電波を受信することができれば、3次元的な現在位置を測位することができる。また、5つ以上の衛星から電波を受信することができれば、高精度に現在位置を測位することができる。
【0027】
表示パネル202は、液晶ディスプレイとこれを駆動する駆動回路とを備えている。主制御部210は、表示パネル202を制御することで、地図画像や推奨経路、現在位置などを表示する。表示パネル202には、液晶ディスプレイに限らず、有機ELディスプレイなど、種々の表示デバイスを採用することができる。
【0028】
音声出力部203は、経路案内時に音声を出力するためのスピーカや、これを駆動する回路などから構成される。
【0029】
無線通信回路205は、基地局BSとの間でデータ通信もしくは音声通信を行うための回路である。基地局BSには、例えばインターネットINTを介して経路探索サーバ100や地図サーバ150が接続されている。無線通信回路205は、基地局BSを介して、経路探索サーバ100や地図サーバ150にアクセスすることができる。
【0030】
通話制御部220は、音声通話のための着信や呼出、音声信号と電気信号の変換などを行う回路である。
【0031】
コマンド入力部206は、テンキー206aやカーソルキー206bなどのボタン群から構成される。ユーザは、これらのボタンを用いることで、経路探索に用いられる出発地や目的地などの入力を行うことができる。
【0032】
地図サーバ150は、通信部152と、制御部154と、記憶装置155とを備えている。記憶装置155には、地図データベース156が格納されている。通信部152は、インターネットINTを介して携帯電話機200と通信を行うことができる。地図データベース156には、携帯電話機200に供給する地図データが例えばベクトル形式で記録されている。この地図データには、地形や建物、道路等の形状を表すデータが含まれている。制御部154は、携帯電話機200から地図データの取得要求があると、指定された範囲の地図データを地図データベース156から検索し、通信部152を介して携帯電話機200へ送信する。
【0033】
経路探索サーバ100は、通信部102と、制御部104と、記憶装置105とを備えている。通信部102は、インターネットINTを介して携帯電話機200と通信を行うことができる。記憶装置105には、道路のつながり状態が記録された経路データベース106が記憶されている。道路のつながり状態は、交差点や分岐点等を表すノードデータと、ノードデータを結ぶ線分によって道路を表すリンクデータとによって表されている。経路探索サーバ100は、携帯電話機200から経路探索要求があると、経路データベース106を用いて、指定された出発地と目的地とを結ぶ推奨経路を探索する。そして、探索の結果、得られた推奨経路データ(以下、「経路データ」と言う)を、通信部102を介して携帯電話機200へ送信する。
【0034】
本実施形態では、経路データは、推奨経路(以下、「経路」と言う)を複数の区間に分割した分割位置を示す位置データを経路の並び順に配置したものである。即ち現在位置の緯度、経度を(X0、Y0)、目的地の緯度、経度を(Xn、Yn)とし、現在地から目的地に向けて経路をn個の区間に分割する位置(X1、Y1)〜(Xn−1、Yn−1)を定め、それらの順番に並べた形式(X0、Y0、X1、Y1、X2、Y2、・・・Xn−1、Yn−1、Xn、Yn)とすることができる。
【0035】
本実施形態では、経路探索サーバ100の制御部104は、自己の記憶装置105に記憶された経路データベース106を用いて経路探索を行う。しかし、経路データベース106が地図サーバ150に記憶されている場合には、インターネットINT経由で、この経路データベース106を読み込んで利用してもよい。なお、経路探索サーバ100と地図サーバ150は、一体のサーバとして構成することもできる。また、携帯電話機200の代わりに、通信機能及び画像表示機能を有する他の携帯端末装置(PDA:Personal Digital Assistant)などを用いることもできる。
【0036】
〈経路探索処理〉
図2は、携帯電話機200の主制御部210が実行する経路探索処理のフローチャートである。この処理は、ユーザが、コマンド入力部206を用いて、携帯電話機200の経路案内機能を呼び出した場合に実行される。また、ここでは、経路上を移動する移動対象が車両である場合について説明する。
【0037】
経路探索処理が開始されると、まず、主制御部210は、コマンド入力部206を介して、ユーザから、出発地、目的地等の入力を受け付ける(ステップS1)。出発地は、GPS受信機201により測位された現在位置とすることができる。これらの入力を受け付けると、主制御部210は、無線通信回路205を用いて、経路探索サーバ100へ、経路探索の要求信号を送信する(ステップS2)。この要求信号には、ステップS1で入力された情報が含まれている。
【0038】
経路探索サーバ100は、携帯電話機200から経路探索の要求信号を受信すると、記憶装置105に記憶された経路データベース106を参照して、要求信号に含まれる出発地と目的地とを結ぶ(経由地が設定されていれば経由地を含む)経路を算出する。経路の算出は、例えば周知のダイクストラ法を用いて行う。経路探索サーバ100は、携帯電話機200から取得した出発地或いは目的地の緯度及び経度が、経路データベース106に記録された経路上にない場合には、周知のマップマッチング処理を行うことで、その地点に最も近い道路上の地点を、出発地或いは目的地とする。経路探索サーバ100は、経路を算出すると、前述した経路データを携帯電話機200へ返信する。
【0039】
携帯電話機200の主制御部210は、経路探索サーバ100から経路データを受信すると(ステップS3)、その経路データをRAM212に記憶する(ステップS4)。RAM212に記憶された経路データは、後述する地図表示処理において、表示パネル202上に表示される。なお、経路探索サーバ100から携帯電話機200に送信される経路データには、経路の種別(高速道路、一般道、歩道、線路等)や、案内表示を行うべき交差点や分岐点の緯度、経度を示す位置情報、案内表示時に画面に表示すべき画像データを含めてもよい。案内表示時に画面に表示すべき画像データとしては、例えば、交差点や分岐点における道路の詳細な接続状態を表す画像データや、インターチェンジやランプの案内板を模した画像データなどがある。
【0040】
〈経路案内処理〉
図3は、図2に示した経路探索処理に続いて実行される経路案内処理のフローチャートである。本実施形態では、携帯電話機200の主制御部210は、この処理を所定時間間隔(例えば、1秒に1回)にて実行する。なお、後述の各処理ステップは、処理内容に矛盾を生じない範囲で、任意に順番を変更して又は並列に実行することができるとともに、各処理ステップ間に他のステップを追加してもよい。また、便宜上1ステップとして記載されているステップは、複数ステップに分けて実行することができる一方、便宜上複数ステップに分けて記載されているものは、1ステップとして把握することができる。
【0041】
この経路案内処理が実行されると、まず、主制御部210は、GPS受信機201を用いて現在位置を測位し、測位結果をRAM212に記憶する(ステップS11)。次いで、主制御部210は、測位位置すなわち測位された緯度、経度を含む所定の範囲(例えば、500m四方)の地図データを地図サーバ150から取得する(ステップS12)。測位位置周辺の地図データがRAM212にバッファリングされている場合には、主制御部210は、バッファリングされているデータの中から、測位位置に対応する地図データを取得する。取得する地図データの範囲は、ユーザが設定した地図の表示スケールに合わせて調整することができる。
【0042】
地図データを取得すると、主制御部210は、RAM212から経路データを入力する(ステップS13)。この経路データは、図2に示した経路探索処理のステップS3で経路探索サーバ100から受信したデータである。なお、経路データを、図2のステップS3で受信する代わりに、地図データと同様に、測位位置から所定範囲内のものを図3の経路案内処理の中(ステップS11以後〜S13以前)で受信するように構成してもよい。
【0043】
続いて、ステップS11で測位した測位位置と、ステップS13で入力した経路データとを用いて、判定機能付きルートマッチング処理を行う(ステップS14)。なお、判定機能付きルートマッチング処理には、測位位置をルート上の所定の位置に補正する補正処理(ルートマッチング処理ともいう)と、補正処理を実行するか否かを判定する判定処理とが含まれる。補正処理には、例えば、測位位置の座標と経路データとを比較し、測位位置の座標に最も近い経路上の位置座標を特定すると、測位位置の座標を当該特定した経路上の位置座標に補正するなど周知の補正技術を利用することができる。補正後の位置座標は所定の記憶領域にルートマッチ情報として記憶される。なお、判定処理の詳細については後述する。
【0044】
次に、主制御部210は、ステップS12で取得したベクトル形式の地図データにより地図を描画し、ステップS13で入力した経路データにより経路を描画し、地図上に経路を重畳して表示パネル202に表示する。さらに、ステップS14で行った判定機能付きルートマッチング処理の結果に基づいて、車両の現在位置を示す現在位置マーク及び走行軌跡を重畳することにより経路案内表示を行う。
【0045】
〈ルートマッチング処理〉
図4は、図3の判定機能付きルートマッチング処理のフローチャートである。なお、図3のステップS11にて測位した最新の測位情報(測位位置及び測位時刻を含む)を、以下「対象測位情報」といい、これにより以前の測位情報についてはルートマッチング処理が行われ、そのルートマッチ情報が所定の記憶領域に格納されているものとする。
【0046】
まず、主制御部210は、所定の記憶領域に記憶されているルートマッチ情報を使用して車両の第1予測速度を算出する(S141)。ルートマッチ情報には、現時点迄にルートマッチングしたルートマッチ位置(補正位置の座標)、当該ルートマッチ前の測位位置及び測位時刻などが含まれる。主制御部210は、例えば、直近2つのルートマッチ情報の差分、すなわち、第1ルートマッチ位置と第2ルートマッチ位置との差分と、第2ルートマッチ位置に対応する測位時刻から第1ルートマッチ位置の測位時刻への経過時間とから、第1予測速度を算出することができる。
【0047】
次に、主制御部210は、GPS測位情報を使用して車両の第2予測速度を算出する(S142)。GPS測位情報には、GPS受信機201により測位された測位位置及び測位時刻などが含まれる。主制御部210は、例えば、今回測位された対象測位情報と現時点迄で最後に実行されたルートマッチングの情報(以下、「最新ルートマッチ情報」という。)との差分、すなわち、対象測位位置と最新ルートマッチ位置との差分と、最新ルートマッチ位置に対応する測位時刻から対象測位位置の測位時刻までの経過時間とに基づいて、第2予測速度を算出することができる。
【0048】
次に、主制御部210は、車両の所定期間中の平均速度を計算することにより車両の第3予測速度を算出する(S143)。所定期間中の平均速度は、例えばメディアンフィルターなどの従来技術を適用して算出することができる。平均速度の算出方法は、設計に応じて適宜設定することができるが、例えば、現時点から起算して30秒前を基準点とした場合の当該基準点より以前15秒おきに30秒、45秒、60秒、75秒、90秒の5つの点における速度を算出し、最大値及び最小値を除いた3つの値の平均を平均速度とすることができる。
【0049】
次に、主制御部210は、第1予測速度、第2予測速度及び第3予測速度の中から、所定条件に合致する速度を車両の予測速度として選択する(S144)。本実施形態では、最も速い速度を選択する。予測速度は、GPS受信機201の性能や測位状態などに応じて計算値が異なるところ、算出方法の異なる複数の予測速度から車両の予測速度を決定することにより、予測速度の精度を向上させることができる。なお、上記3つの予測速度については、設計に応じて内容の変更や削除が可能であり、例えば、いずれか1つの予測速度のみを使用してもよいし、また、他の算出方法で求めた予測速度を第4予測速度として追加してもよい。
【0050】
予測速度が算出されると、主制御部210は、予測速度の補正処理を実行する(S145)。実際の車両の速度は、GPSの測位間隔(例えば1秒)や処理時間等により発生する遅延のため、加速していれば計算値より速くなる一方、減速していれば計算値より遅くなる。よって、ここでは、今回計算した予測速度と前回計算した予測速度との差分(加速度)を今回計算した予測速度に加算する。これにより、遅延の影響を減少させることができる。
【0051】
次に、主制御部210は、補正後の予測速度で車両が経路上の最新ルートマッチ位置から所定の予測移動時間分移動した場合の予測移動距離を算出する(S146)。所定の予測移動時間は、設計に応じて適宜設定することができるが、例えば、最新ルートマッチ位置に対応する測位時刻から対象測位情報の測位時刻までの経過時間とすることができる。
【0052】
予測移動距離が算出されると、主制御部210は、予測移動距離を所定の補正距離によって補正する(S147)。所定の補正距離は、連続してルートマッチングが失敗した回数に応じて大きくなるように計算される。例えば、第1の所定距離(例:50m)にルートマッチングが失敗した回数を乗算し、その結果を第2の所定距離(例:75m)に加算した合計を補正距離とすることができる(式:補正距離=(第1所定距離×ルートマッチング失敗回数)+第2所定距離)。なお、第1及び第2所定距離は、GPSの性能や移動対象の種類を考慮して設定することができる。また、補正距離には、GPSの性能や移動対象の種類に応じた最大距離(例:車両の場合は200m)を設定することができる。
【0053】
次に、主制御部210は、補正後の予測移動距離に基づいて対象測位位置が予測される範囲(以下、「予測測位範囲」という。)を算出する。例えば、まず、最新ルートマッチ情報のルートマッチ位置を基準位置として、当該基準位置から車両が補正後の予測移動距離分だけ経路上を進行方向に移動した場合の位置(以下、「予測最大移動位置」という。)を特定する。そして、この基準位置から予測最大移動位置までの経路を「予測移動軌跡」として特定し、当該予測移動軌跡を含む一定の範囲を「予測測位範囲」として算出する。予測移動軌跡を基準とした予測測位範囲の算出条件は、設計に応じて適宜設定することができるが、ここでは、予測移動軌跡を対照軸とした場合の当該対照軸から所定距離内にある範囲を予測測位範囲とする。所定距離は、移動対象や道路の種類などに応じて設定することができ、例えば移動対象がユーザ歩行である場合は当該対照軸から75mずつ左右に拡張した範囲、移動対象が車両である場合は、一般道路では110mずつ、高速道路では300mずつ左右に拡張した範囲とすることができる。
【0054】
そして、主制御部210は、図3のステップS11で測位された対象測位位置が、予測測位範囲に含まれるか否かを判定する(S149)。そして、対象測位位置が予測測位範囲に含まれると判定した場合は、ルートマッチングを実行し、対象測位位置を経路上のルートマッチ位置に修正する。また、ルートマッチング情報を所定の記憶領域に格納する。一方、対象測位位置が予測測位範囲に含まれないと判定した場合は、ルートマッチングは実行せず、ルートマッチング失敗回数をカウントして所定の記憶領域に格納する。
【0055】
図5では、本実施形態のルートマッチングを説明するための図である。同図(A)では、Y1は、予測移動距離に基づいて設定された予測測位範囲である。予測測位範囲Y1は、最新ルートマッチ位置Q1から予測最大移動位置S1までの予測移動軌跡S11を基準に生成されている。ここで、測位位置P1の次に測位された測位位置P2は、予測測位範囲内Y1に位置していない。従って、主制御部210は、測位位置P2を経路上のルートマッチ位置Q2に修正するルートマッチングを実行せず、最新ルートマッチ位置はQ1のままである。
【0056】
一方、図5(B)は、測位位置P2の次に測位位置P3が測位された場合のルートマッチングを示す図である。測位位置P3の測位時点では、測位位置P2の測位時よりも時間が経過しているので予測移動距離が更新され、更新後の予測移動距離に基づいて予測最大移動位置S2、予測移動軌跡S12、予測測位範囲Y2が新たに設定されている。ここで、測位位置P3は、予測測位範囲Y2に含まれている。従って、主制御部210は、測位位置P3を経路上の最も近いルートマッチ位置Q3に修正するルートマッチングを実行する。これにより、ルートマッチ位置Q3が最新ルートマッチ位置となる。主制御部210は、ルートマッチングの実行によりルートマッチング失敗回数をクリアする。
【0057】
以上説明したように、本実施形態の経路案内システムによれば、GPS受信機201で検出した測位位置を経路上に修正するルートマッチングを行うときに、当該測位位置が予測走行距離に基づいて定まる予測測位範囲に含まれるか否かを判定し、判定結果が否である場合は当該測位位置についてルートマッチングを実行しない(経路上に修正しない)。これにより、移動対象が経路上で複数の部分が近接している箇所を通行するときのマッチング精度を向上させることが可能になる。
【0058】
〈その他の実施形態〉
本発明は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において、他の様々な形で実施することができる。上記実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈されるものではない。
【0059】
(1)ルートマッチングの判定条件の他の例として、案内経路上に複数の部分が近接している箇所が存在する場合は、移動対象が順番に通過すべき通過地点を予め経路データに設定しておき、移動対象が当該通過地点を通過したか否かに基づいて、ルートマッチングの実行の有無を決定するようにしてもよい。図6(A)は、案内経路上に設置された複数の通過地点Z1、Z2、Z3を示している。主制御部120は、例えば、通過地点毎に移動対象の通過の有無を示す通過情報を所定の記憶領域に保持している。GPS受信機により新しい測位位置が検出されると、主制御部120は、当該測位位置を経路上の仮ルートマッチ位置Q2にマッチングさせ、最新ルートマッチ位置Q1と仮ルートマッチ位置Q2との間に位置する通過地点(Z1、Z2、Z3)の通過情報のうち「未通過」を示すものが少なくとも2つ以上あるか否かを判定する。そして、判定結果が是である場合は仮ルートマッチ位置を消去し、判定結果が否である場合は仮ルートマッチ位置を確定させるようにしてもよい。
【0060】
(2)ルートマッチングの判定条件の他の例として、GPS受信機により新しい測位位置が検出されると、主制御部120は、当該測位位置を経路上の仮マッチング位にマッチングさせ、最新ルートマッチ位置から仮ルートマッチ位置まで経路上を移動した場合の移動距離が予測移動距離以内であるか否かを判定し、判定結果が是である場合は仮ルートマッチ位置を確定させ、判定結果が否である場合は仮ルートマッチ位置を消去するようにしてもよい。
【0061】
(3)ルートマッチングの判定条件の他の例として、図8(B)に示すように、GPS受信機により新しい測位位置が検出されると、主制御部120は、当該測位位置を経路上の仮ルートマッチ位置Q2にマッチングさせ、一方、最新のルートマッチ位置Q1から予測最大移動位置S3を結ぶ予測移動軌跡S31を設定する。そして、仮ルートマッチ位置Q2が予測移動軌跡Y3上に位置するか否かを判定し、判定結果が是である場合は仮ルートマッチ位置を確定させ、判定結果が否である場合は仮ルートマッチ位置を取り消すようにしてもよい。同図では、仮ルートマッチ位置Q2が予測移動軌跡Y3上に位置しないため、仮ルートマッチ位置Q2が取り消される。
【0062】
(4)経路上で複数の部分が近接している箇所を地図データ及び経路データを基に識別し、最新のルートマッチ位置が当該近接箇所の付近に存在する時のみ、マッチングの実行判定処理を実行するようにしてもよい。これによれば、ミスマッチングが起こり易い状況でのみ、ルートマッチングを実行するか否かの判定処理が実行されるので、マッチング処理を効率化することができる。
【0063】
(5)予測移動距離の補正処理において、補正距離の算出に使用するルートマッチング失敗回数には、最大値を設定することができる。そして、この最大値による補正距離(最大補正距離)に基づいて算出された対象予測範囲に、対象測位位置が所定回数以上連続して含まれなかった場合は、対象測位位置を経路上の最も近い位置に補正するようにルートマッチングを実行しても良い。
【符号の説明】
【0064】
10・・・経路案内システム、100・・・経路探索サーバ、150・・・地図サーバ、200・・・携帯電話機、201・・・GPS受信機、210・・・主制御部
【特許請求の範囲】
【請求項1】
経路探索サーバとネットワークを介して接続された経路案内装置であって、
前記経路探索サーバから経路データを取得する取得手段と、
前記経路案内装置の現在位置を測位する測位手段と、
前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正手段と、
前記補正した補正位置に基づいて経路案内を行う経路案内手段と、
前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算手段と、
前記計算した予測速度で前記経路案内装置が前記経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する予測移動距離計算手段と、
前記最新補正位置に対応する測位時刻から前記所定時間経過後に測位された対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように前記補正手段を制御する制御手段と、
を有することを特徴とする経路案内装置。
【請求項2】
前記制御手段は、
前記経路案内装置が前記経路上を前記予測移動距離分だけ移動した場合の予測移動軌跡を特定し、当該特定した予測移動軌跡を含む予測測位範囲内に前記対象測位位置が含まれるか否かを判定条件として判定することを特徴とする請求項1に記載の経路案内装置。
【請求項3】
前記予測速度計算手段は、
第1補正位置と第2補正位置の差分と当該第1補正位置に対応する第1測位時刻から当該第2補正位置に対応する第2測位時刻への経過時間とを用いて前記通信端末の第1予測速度を計算する第1予測速度計算手段、
前記対象測位位置と最新補正位置の差分と当該対象測位位置の測位時刻から当該最新補正位置に対応する測位時刻への経過時間とを用いて前記通信端末の第2予測速度を計算する第2予測速度計算手段、及び、
所定期間における前記経路案内装置の平均速度を第3予測速度として計算する第3予測速度計算手段のうちの少なくとも1の計算手段を使用して前記予測速度を計算することを特徴とする請求項1または2に記載の経路案内装置。
【請求項4】
前記予測速度計算手段は、
今回計算した予測速度と前回計算した予測速度との差分を当該今回計算した予測速度に加算することを特徴とする請求項1から3いずれか1項に記載の経路案内装置。
【請求項5】
前記予測移動距離計算手段は、
前記計算した予測移動距離に対して、連続して前記補正を行わなかった回数に応じて大きくなるように計算される補正距離を加算することを特徴とする請求項1から4いずれか1項に記載の経路案内装置。
【請求項6】
前記予測移動距離計算手段は、
所定距離値に前記補正を行わなかった回数を乗算することにより前記補正距離を計算することを特徴とする請求項5に記載の経路案内装置。
【請求項7】
経路探索サーバとネットワークを介して接続される経路案内装置において経路を案内する経路案内方法であって、
前記経路探索サーバから経路データを取得する取得ステップと、
前記経路案内装置の現在位置を測位する測位ステップと、
前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正ステップと、
前記補正した補正位置に基づいて経路案内を行う経路案内ステップと、
前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算ステップと、
前記計算した予測速度と所定の移動時間とに基づいて前記経路案内装置の予測移動距離を計算する予測移動距離計算ステップと、
対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように制御する制御ステップと、
を有することを特徴とする経路案内方法。
【請求項8】
経路探索サーバとネットワークを介して接続されるコンピュータに、
前記経路探索サーバから経路データを取得する取得ステップと、
前記経路案内装置の現在位置を測位する測位ステップと、
前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正ステップと、
前記補正した補正位置に基づいて経路案内を行う経路案内ステップと、 前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算ステップと、
前記計算した予測速度と所定の移動時間とに基づいて前記経路案内装置の予測移動距離を計算する予測移動距離計算ステップと、
対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように制御する制御ステップと、
を実行させるための経路案内プログラム。
【請求項1】
経路探索サーバとネットワークを介して接続された経路案内装置であって、
前記経路探索サーバから経路データを取得する取得手段と、
前記経路案内装置の現在位置を測位する測位手段と、
前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正手段と、
前記補正した補正位置に基づいて経路案内を行う経路案内手段と、
前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算手段と、
前記計算した予測速度で前記経路案内装置が前記経路上の最新補正位置から所定時間移動した場合の予測移動距離を計算する予測移動距離計算手段と、
前記最新補正位置に対応する測位時刻から前記所定時間経過後に測位された対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように前記補正手段を制御する制御手段と、
を有することを特徴とする経路案内装置。
【請求項2】
前記制御手段は、
前記経路案内装置が前記経路上を前記予測移動距離分だけ移動した場合の予測移動軌跡を特定し、当該特定した予測移動軌跡を含む予測測位範囲内に前記対象測位位置が含まれるか否かを判定条件として判定することを特徴とする請求項1に記載の経路案内装置。
【請求項3】
前記予測速度計算手段は、
第1補正位置と第2補正位置の差分と当該第1補正位置に対応する第1測位時刻から当該第2補正位置に対応する第2測位時刻への経過時間とを用いて前記通信端末の第1予測速度を計算する第1予測速度計算手段、
前記対象測位位置と最新補正位置の差分と当該対象測位位置の測位時刻から当該最新補正位置に対応する測位時刻への経過時間とを用いて前記通信端末の第2予測速度を計算する第2予測速度計算手段、及び、
所定期間における前記経路案内装置の平均速度を第3予測速度として計算する第3予測速度計算手段のうちの少なくとも1の計算手段を使用して前記予測速度を計算することを特徴とする請求項1または2に記載の経路案内装置。
【請求項4】
前記予測速度計算手段は、
今回計算した予測速度と前回計算した予測速度との差分を当該今回計算した予測速度に加算することを特徴とする請求項1から3いずれか1項に記載の経路案内装置。
【請求項5】
前記予測移動距離計算手段は、
前記計算した予測移動距離に対して、連続して前記補正を行わなかった回数に応じて大きくなるように計算される補正距離を加算することを特徴とする請求項1から4いずれか1項に記載の経路案内装置。
【請求項6】
前記予測移動距離計算手段は、
所定距離値に前記補正を行わなかった回数を乗算することにより前記補正距離を計算することを特徴とする請求項5に記載の経路案内装置。
【請求項7】
経路探索サーバとネットワークを介して接続される経路案内装置において経路を案内する経路案内方法であって、
前記経路探索サーバから経路データを取得する取得ステップと、
前記経路案内装置の現在位置を測位する測位ステップと、
前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正ステップと、
前記補正した補正位置に基づいて経路案内を行う経路案内ステップと、
前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算ステップと、
前記計算した予測速度と所定の移動時間とに基づいて前記経路案内装置の予測移動距離を計算する予測移動距離計算ステップと、
対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように制御する制御ステップと、
を有することを特徴とする経路案内方法。
【請求項8】
経路探索サーバとネットワークを介して接続されるコンピュータに、
前記経路探索サーバから経路データを取得する取得ステップと、
前記経路案内装置の現在位置を測位する測位ステップと、
前記測位した測位位置を前記経路データによる経路上の所定の位置に補正する補正ステップと、
前記補正した補正位置に基づいて経路案内を行う経路案内ステップと、 前記測位した測位位置及び/又は前記補正した補正位置に基づいて前記経路案内装置の予測速度を計算する予測速度計算ステップと、
前記計算した予測速度と所定の移動時間とに基づいて前記経路案内装置の予測移動距離を計算する予測移動距離計算ステップと、
対象測位位置が前記予測移動距離によって定まる判定条件を満たすか否か判定し、判定結果が否である場合は、当該対象測位位置に対する前記補正を行わないように制御する制御ステップと、
を実行させるための経路案内プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−93317(P2012−93317A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−242841(P2010−242841)
【出願日】平成22年10月28日(2010.10.28)
【出願人】(500578216)株式会社ゼンリンデータコム (231)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月28日(2010.10.28)
【出願人】(500578216)株式会社ゼンリンデータコム (231)
【Fターム(参考)】
[ Back to top ]