
経路案内装置
【課題】 走行中の車両が設定された移動経路を外れた場合でも、新たな移動経路を即座に提示することが可能な経路案内装置を提供すること。
【解決手段】ECU8は、車両が交差点に接近した際、車両が走行中の車線の進行方向が、設定された移動経路の進行方向と一致しない場合、すなわち、車両が設定された移動経路を外れる車線を走行中である場合、移動経路の再設定を行う。このように、車両が交差点に接近した際、車両が移動経路を外れる前の段階において、当該車両が移動経路を外れることが明らかになった時点で、移動経路の再設定を行ため、車両が移動経路を外れることが明らかになった時点から、車両が移動経路を完全に外れるまでの間に、移動経路の再設定を行うことができる。その結果として、走行中の車両が設定された移動経路を外れた場合でも、再設定された新たな移動経路を即座に提示することができる。
【解決手段】ECU8は、車両が交差点に接近した際、車両が走行中の車線の進行方向が、設定された移動経路の進行方向と一致しない場合、すなわち、車両が設定された移動経路を外れる車線を走行中である場合、移動経路の再設定を行う。このように、車両が交差点に接近した際、車両が移動経路を外れる前の段階において、当該車両が移動経路を外れることが明らかになった時点で、移動経路の再設定を行ため、車両が移動経路を外れることが明らかになった時点から、車両が移動経路を完全に外れるまでの間に、移動経路の再設定を行うことができる。その結果として、走行中の車両が設定された移動経路を外れた場合でも、再設定された新たな移動経路を即座に提示することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の移動経路を案内する経路案内装置に関する。
【背景技術】
【0002】
従来、走行中の車両が設定された移動経路から外れた場合に、移動経路の再設定を行う機能を有するナビゲーション装置が公知である。この従来装置では、設定された移動経路に沿って車両が走行しているか否かを監視するとともに、車両が設定された移動経路から外れたことが確認された場合には、その時点における車両位置を出発地点として、移動経路の再設定を行うものである。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来装置では、走行中の車両が設定された移動経路を外れた段階で移動経路の再設定を行うため、ユーザーは移動経路の再設定が終了するまでの間、走行すべき移動経路を把握することができなくなる。
【0004】
本発明は、上記の問題に鑑みてなされたものであり、走行中の車両が設定された移動経路を外れた場合でも、新たな移動経路を即座に提示することが可能な経路案内装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、請求項1に記載の経路案内装置では、車両の移動経路を設定する経路設定手段と、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識する認識手段と、車両が交差点に接近した際、認識手段の認識結果から、経路設定手段によって設定された移動経路から外れる車線を車両が走行中である場合には、経路設定手段に対し、移動経路を再設定するよう指示する制御手段とを備えることを特徴とする。
【0006】
このように、本発明の経路案内装置では、認識手段は、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識する。制御手段は、車両が交差点に接近した際、認識手段の認識結果から、経路設定手段によって設定された移動経路から外れる車線を車両が走行中である場合には、経路設定手段に対し、移動経路を再設定するよう指示する。これにより、本経路案内装置では、車両が交差点に接近した際、車両が経路設定手段によって設定された移動経路から外れる車線を走行中である場合、言い換えれば、車両が移動経路を外れる前の段階において、当該車両が移動経路を外れることが明らかになった時点で、移動経路の再設定を行う。そのため、車両が移動経路を外れることが明らかになった時点から、車両が移動経路を完全に外れるまでの間に、移動経路の再設定を完了することができる。その結果として、走行中の車両が設定された移動経路を外れた場合でも、再設定された新たな移動経路を即座に提示することができる。
【0007】
請求項2に記載のように、認識手段は、車両が走行中の車線の路面に標示された進行方向標示を検出するとともに、検出された進行方向標示から、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することが望ましい。これにより、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを確実に認識することができる。
【0008】
請求項3に記載のように、認識手段は、車両が走行中の車線の路上に設置された進行方向標示を検出するとともに、検出された進行方向標示から、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することとしても良い。このようにしても、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを確実に認識することができる。
【0009】
請求項4に記載のように、経路設定手段は、認識手段の認識結果から、車両が走行中の車線における進行方向に沿って移動経路の再設定を行うことが望ましい。これにより、ユーザーは車両の運転を容易に継続することができる。
【0010】
請求項5に記載のように、経路設定手段が移動経路を再設定したことを報知する報知手段を設けることが望ましい。これにより、ユーザーは移動経路が再設定されたことを確実に把握することができる。
【発明を実施するための最良の形態】
【0011】
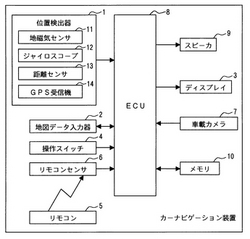
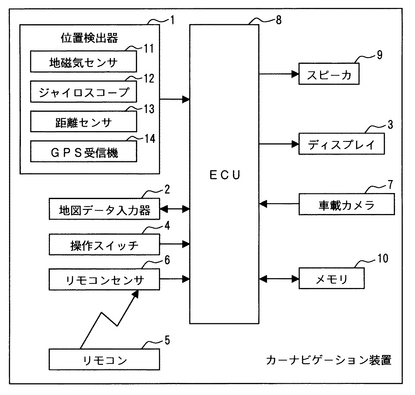
図1は、本発明の一実施形態における経路案内装置の全体構成を示すブロック図である。本経路案内装置は、カーナビゲーション装置に組み込まれて動作する。
【0012】
図1に示すように、位置検出器1は、地磁気センサ11、ジャイロスコープ12、距離センサ13、GPS受信機14から構成され、車両の現在位置および進行方向の検出を行う。
【0013】
地磁気センサ11は、例えばパーマロイ等の環状の強磁性体に、これを励磁するための励磁巻線と、方向検出用の直交する2つの検出巻線とが巻かれた構成を持つ。そして、励磁巻線に交流電圧を印加することによって2つの検出巻線に発生する電圧を計測し、これに基づいて車両の進行方向を絶対方位として検出する。
【0014】
ジャイロスコープ12は、例えば水晶振動子を備え、当該振動子を振動させた際に発生する、コリオリ力に基づく振動から、車両のヨー角速度(ヨーレート)を検出する。
【0015】
距離センサ13は、例えば車両に搭載された図示しない車輪や車軸の回転信号に基づいて、車両の移動距離を検出する。
【0016】
GPS受信機14は、人工衛星である図示しないGPS衛星から送信される位置測定用のGPS信号を受信し、車両が現在走行している地点の緯度や経度、高度を検出する。
【0017】
位置検出器1は、前述した4つの機器の検出結果を相互に補間することによって精度の高い位置検出を行う。もちろん、要求される検出精度によっては、前述の4つの機器を全て備える必要はない。なお、車両の現在位置および進行方向の検出に関しては、ステアリングセンサ等、他のセンサによる検出信号に基づいて行うこととしてもよい。
【0018】
地図データ入力器2は、例えば記憶媒体としてハードディスクを有し、道路情報、車線情報、建造物情報、各地域の住所情報や郵便番号情報などを含む地図データと、地図画像を表示する地図画像データとを記憶する。地図データおよび地図画像データに関しては、CD−ROMやDVD−ROM等に記憶することとしても良い。
【0019】
ディスプレイ3は、車載用の小型ディスプレイであり、地図画像の表示を含む各種ナビゲーション表示を行う。前述の各種ナビゲーション表示に関しては、車載用のヘッドアップディスプレイ等を用いることとしても良い。
【0020】
操作スイッチ4は、複数のメカニカルなスイッチから構成され、カーナビゲーション装置に対して、各種ナビゲーション動作の開始や終了を指示する。前述の各種ナビゲーション指示に関しては、操作キーを表示する表示パネルと、当該表示パネルに表示された操作キーを押したことを検出するタッチパネルを備えたタッチスイッチによって構成しても良い。また、音声認識を利用して行うこととしても良い。
【0021】
リモコン5は、例えば各種機能スイッチを備えた多機能リモコンであり、リモコンセンサ6を介して、上述した操作スイッチ4とほぼ同様の操作を行うことができる。
【0022】
車載用カメラ7は、例えばCMOSカメラであり、車両が走行中の車線の路面に標示された進行方向標示を撮影して画像データを生成する。前述した進行方向標示の撮影に関しては、車載用のCCDカメラ等を用いることとしても良い。
【0023】
ECU8は、ナビゲーション用ECUであり、操作スイッチ4またはリモコン5からの指示に従って、地図画像表示を含む各種ナビゲーション動作を実行する。具体的には、ECU8は、位置検出器1が検出した車両の現在位置および進行方向に基づいて、地図データ入力器2から車両の現在位置周辺の地図画像データを読み出し、車両の現在位置を示すマークを重畳した地図画像をディスプレイ3に表示させるとともに、スピーカ9から各種音声案内を行わせる。
【0024】
また、ECU8は、目的地までの移動経路を設定してディスプレイ3に表示された地図画像に重畳表示することも行う。具体的には、ECU8は、操作スイッチ4またはリモコン5から目的地が入力されると、車両の現在位置から入力された目的地までの移動経路を、例えば公知のダイクストラ法等によって算出し、ディスプレイ3に表示された地図画像に重畳表示する。前述した移動経路の算出に関しては、高速道路の利用可否を入力可能とし、入力結果に従って移動経路を算出することとしても良い。また、目的地までの経由地点を単数または複数設定し、当該地点を通過するよう移動経路を算出することとしても良い。
【0025】
さらに、ECU8は、車両が交差点に接近した際、当該車両が設定された移動経路から外れる車線を走行中である場合には、移動経路の再設定を行う。具体的には、ECU8は、車両が交差点に接近した際、車載用カメラ7が接続されており、かつ、移動経路が設定されていることが確認されると、車載用カメラ7を動作させ、車両が走行中の車線の路面に標示された進行方向標示を撮影させる。そして、車載用カメラ7が生成した画像データを取得して画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。判別された車線の進行方向が、設定された移動経路の進行方向と一致しない場合、すなわち、車両が設定された移動経路を外れる車線を走行中である場合、ECU8は、車両が走行中の車線の進行方向に沿って移動経路の再設定を行い、再設定された移動経路をディスプレイ3の地図画像に重畳表示させるとともに、スピーカ9から移動経路の再設定が完了したことを示す案内音声を出力させる。
【0026】
メモリ10は、ECU8が各種動作を行う際の一時的な記憶領域として利用される。前述の記憶領域に関しては、例えばメモリカード等を利用することとしても良い。
【0027】
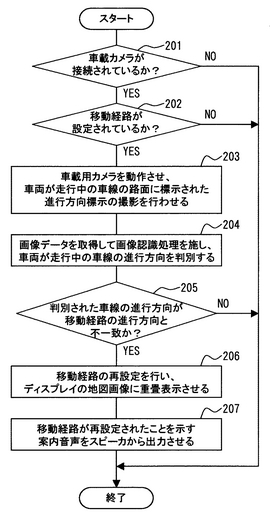
図2は、本実施形態の経路案内装置において、移動経路の再設定を行う処理に関するフローチャートである。本フローチャートの処理は、車両が設定された移動経路に沿って走行している場合において、当該車両が各交差点に接近するたびに実行される。
【0028】
ステップ201では、ECU8は、車載カメラ7が接続されているか否かを確認する。車載カメラ7の接続が確認された場合には、ステップ202へ進む。確認されなかった場合には、処理を終了する。ステップ202では、移動経路が設定されているか否かを確認する。移動経路が設定されている場合には、ステップ203へ進む。設定されていない場合には、処理を終了する。
【0029】
ステップ203では、車載用カメラ7を動作させ、車両が走行中の車線の路面に標示された進行方向標示を撮影させる。ステップ204では、車載用カメラ7から撮影された画像データを取得し、当該データに画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。進行方向標示を利用することで、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを確実に判別できるのである。
【0030】
ステップ205では、ステップ204で判別された車線の進行方向と、設定された移動経路の進行方向が不一致であるか否か、すなわち、車両が設定された移動経路を外れる車線を走行中であるか否かを判定する。不一致である場合は、ステップ206へ進む。一致する場合は、処理を終了する。
【0031】
ステップ206では、ステップ204で判別された車線における進行方向に沿って移動経路の再設定を行うとともに、再設定された移動経路をディスプレイ3の地図画像に重畳表示させる。車両が走行中の車線における進行方向に沿って移動経路の再設定を行うことで、ユーザーは車両の運転を容易に継続することができるのである。
【0032】
ステップ207では、移動経路が再設定されたことを示す案内音声をスピーカ9から出力させ、処理を終了する。移動経路が再設定されたことを示す案内音声をスピーカ9から出力させることで、ユーザーは移動経路が再設定されたことを確実に把握することができる。
【0033】
このように、本実施形態の経路案内装置では、ECU8は、車両が交差点に接近した際、車両が走行中の車線の進行方向が、設定された移動経路の進行方向と一致しない場合、すなわち、車両が設定された移動経路を外れる車線を走行中である場合、移動経路の再設定を行う。これにより、本経路案内装置では、車両が交差点に接近した際、車両が設定された移動経路から外れる車線を走行中である場合、言い換えれば、車両が移動経路を外れる前の段階において、当該車両が移動経路を外れることが明らかになった時点で、移動経路の再設定を行う。そのため、車両が移動経路を外れることが明らかになった時点から、車両が移動経路を完全に外れるまでの間に、移動経路の再設定を行うことができる。その結果として、走行中の車両が設定された移動経路を外れた場合でも、再設定された新たな移動経路を即座に提示することができる。
【0034】
次に、本発明の変形例について説明する。前述した実施形態では、車載カメラ7は車両が走行中の車線の路面に標示された進行方向標示を撮影し、当該車線の進行方向を判別したが、本変形例では、車載カメラ7は車両が走行中の車線の路上に設置された進行方向標示を撮影し、当該車線の進行方向を判別する。上述した点が、本変形例のポイントである。
【0035】
本変形例の車載カメラ7は、車両が走行中の車線の路上に設置された進行方向標示を撮影して画像データを生成する。
【0036】
本変形例のECU8は、車両が走行中の車線の路上に設置された進行方向標示を撮影させ、車載用カメラ7が生成した画像データを取得して画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。
【0037】
その他の構成・動作は、前述した実施形態の場合と同様であるため、説明を省略する。
【0038】
また、本変形例の経路案内装置において、移動経路の再設定を行う処理に関するフローチャートについては、前述した実施形態における図2のフローチャートにおいて、車載用カメラ7を動作させ、車両が走行中の車線の路面に標示された進行方向標示を撮影させるステップに代えて、車載用カメラ7を動作させ、車両が走行中の車線の路上に設置された進行方向標示を撮影させるステップを設けることとなる。
【0039】
このように、本変形例の経路案内装置では、ECU8は、車両が走行中の車線の路上に設置された進行方向標示を撮影させ、車載用カメラ7が生成した画像データを取得して画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。このようにしても、走行中の車両が設定された移動経路を外れた場合に、再設定された新たな移動経路を即座に提示することができる。
【0040】
前述した各実施形態では、本装置はカーナビゲーション装置に組み込まれて動作したが、これに限定されるものではなく、道路表示機能を備えた機器であれば好適に利用できる。しかしながら、最も好適なのは、カーナビゲーション装置に組み込まれて動作した場合であることを言及しておく。
【図面の簡単な説明】
【0041】
【図1】本発明の一実施形態における走行車線案内装置の全体構成を示すブロック図である。
【図2】本実施形態の経路案内装置において、移動経路の再設定を行う処理に関するフローチャートである。
【符号の説明】
【0042】
1…位置検出器
11…地磁気センサ
12…ジャイロスコープ
13…距離センサ
14…GPS受信機
2…地図データ入力器
3…ディスプレイ
4…操作スイッチ
5…リモコン
6…リモコンセンサ
7…車載カメラ
8…ECU
9…スピーカ
10…メモリ
【技術分野】
【0001】
本発明は、車両の移動経路を案内する経路案内装置に関する。
【背景技術】
【0002】
従来、走行中の車両が設定された移動経路から外れた場合に、移動経路の再設定を行う機能を有するナビゲーション装置が公知である。この従来装置では、設定された移動経路に沿って車両が走行しているか否かを監視するとともに、車両が設定された移動経路から外れたことが確認された場合には、その時点における車両位置を出発地点として、移動経路の再設定を行うものである。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来装置では、走行中の車両が設定された移動経路を外れた段階で移動経路の再設定を行うため、ユーザーは移動経路の再設定が終了するまでの間、走行すべき移動経路を把握することができなくなる。
【0004】
本発明は、上記の問題に鑑みてなされたものであり、走行中の車両が設定された移動経路を外れた場合でも、新たな移動経路を即座に提示することが可能な経路案内装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、請求項1に記載の経路案内装置では、車両の移動経路を設定する経路設定手段と、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識する認識手段と、車両が交差点に接近した際、認識手段の認識結果から、経路設定手段によって設定された移動経路から外れる車線を車両が走行中である場合には、経路設定手段に対し、移動経路を再設定するよう指示する制御手段とを備えることを特徴とする。
【0006】
このように、本発明の経路案内装置では、認識手段は、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識する。制御手段は、車両が交差点に接近した際、認識手段の認識結果から、経路設定手段によって設定された移動経路から外れる車線を車両が走行中である場合には、経路設定手段に対し、移動経路を再設定するよう指示する。これにより、本経路案内装置では、車両が交差点に接近した際、車両が経路設定手段によって設定された移動経路から外れる車線を走行中である場合、言い換えれば、車両が移動経路を外れる前の段階において、当該車両が移動経路を外れることが明らかになった時点で、移動経路の再設定を行う。そのため、車両が移動経路を外れることが明らかになった時点から、車両が移動経路を完全に外れるまでの間に、移動経路の再設定を完了することができる。その結果として、走行中の車両が設定された移動経路を外れた場合でも、再設定された新たな移動経路を即座に提示することができる。
【0007】
請求項2に記載のように、認識手段は、車両が走行中の車線の路面に標示された進行方向標示を検出するとともに、検出された進行方向標示から、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することが望ましい。これにより、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを確実に認識することができる。
【0008】
請求項3に記載のように、認識手段は、車両が走行中の車線の路上に設置された進行方向標示を検出するとともに、検出された進行方向標示から、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することとしても良い。このようにしても、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを確実に認識することができる。
【0009】
請求項4に記載のように、経路設定手段は、認識手段の認識結果から、車両が走行中の車線における進行方向に沿って移動経路の再設定を行うことが望ましい。これにより、ユーザーは車両の運転を容易に継続することができる。
【0010】
請求項5に記載のように、経路設定手段が移動経路を再設定したことを報知する報知手段を設けることが望ましい。これにより、ユーザーは移動経路が再設定されたことを確実に把握することができる。
【発明を実施するための最良の形態】
【0011】
図1は、本発明の一実施形態における経路案内装置の全体構成を示すブロック図である。本経路案内装置は、カーナビゲーション装置に組み込まれて動作する。
【0012】
図1に示すように、位置検出器1は、地磁気センサ11、ジャイロスコープ12、距離センサ13、GPS受信機14から構成され、車両の現在位置および進行方向の検出を行う。
【0013】
地磁気センサ11は、例えばパーマロイ等の環状の強磁性体に、これを励磁するための励磁巻線と、方向検出用の直交する2つの検出巻線とが巻かれた構成を持つ。そして、励磁巻線に交流電圧を印加することによって2つの検出巻線に発生する電圧を計測し、これに基づいて車両の進行方向を絶対方位として検出する。
【0014】
ジャイロスコープ12は、例えば水晶振動子を備え、当該振動子を振動させた際に発生する、コリオリ力に基づく振動から、車両のヨー角速度(ヨーレート)を検出する。
【0015】
距離センサ13は、例えば車両に搭載された図示しない車輪や車軸の回転信号に基づいて、車両の移動距離を検出する。
【0016】
GPS受信機14は、人工衛星である図示しないGPS衛星から送信される位置測定用のGPS信号を受信し、車両が現在走行している地点の緯度や経度、高度を検出する。
【0017】
位置検出器1は、前述した4つの機器の検出結果を相互に補間することによって精度の高い位置検出を行う。もちろん、要求される検出精度によっては、前述の4つの機器を全て備える必要はない。なお、車両の現在位置および進行方向の検出に関しては、ステアリングセンサ等、他のセンサによる検出信号に基づいて行うこととしてもよい。
【0018】
地図データ入力器2は、例えば記憶媒体としてハードディスクを有し、道路情報、車線情報、建造物情報、各地域の住所情報や郵便番号情報などを含む地図データと、地図画像を表示する地図画像データとを記憶する。地図データおよび地図画像データに関しては、CD−ROMやDVD−ROM等に記憶することとしても良い。
【0019】
ディスプレイ3は、車載用の小型ディスプレイであり、地図画像の表示を含む各種ナビゲーション表示を行う。前述の各種ナビゲーション表示に関しては、車載用のヘッドアップディスプレイ等を用いることとしても良い。
【0020】
操作スイッチ4は、複数のメカニカルなスイッチから構成され、カーナビゲーション装置に対して、各種ナビゲーション動作の開始や終了を指示する。前述の各種ナビゲーション指示に関しては、操作キーを表示する表示パネルと、当該表示パネルに表示された操作キーを押したことを検出するタッチパネルを備えたタッチスイッチによって構成しても良い。また、音声認識を利用して行うこととしても良い。
【0021】
リモコン5は、例えば各種機能スイッチを備えた多機能リモコンであり、リモコンセンサ6を介して、上述した操作スイッチ4とほぼ同様の操作を行うことができる。
【0022】
車載用カメラ7は、例えばCMOSカメラであり、車両が走行中の車線の路面に標示された進行方向標示を撮影して画像データを生成する。前述した進行方向標示の撮影に関しては、車載用のCCDカメラ等を用いることとしても良い。
【0023】
ECU8は、ナビゲーション用ECUであり、操作スイッチ4またはリモコン5からの指示に従って、地図画像表示を含む各種ナビゲーション動作を実行する。具体的には、ECU8は、位置検出器1が検出した車両の現在位置および進行方向に基づいて、地図データ入力器2から車両の現在位置周辺の地図画像データを読み出し、車両の現在位置を示すマークを重畳した地図画像をディスプレイ3に表示させるとともに、スピーカ9から各種音声案内を行わせる。
【0024】
また、ECU8は、目的地までの移動経路を設定してディスプレイ3に表示された地図画像に重畳表示することも行う。具体的には、ECU8は、操作スイッチ4またはリモコン5から目的地が入力されると、車両の現在位置から入力された目的地までの移動経路を、例えば公知のダイクストラ法等によって算出し、ディスプレイ3に表示された地図画像に重畳表示する。前述した移動経路の算出に関しては、高速道路の利用可否を入力可能とし、入力結果に従って移動経路を算出することとしても良い。また、目的地までの経由地点を単数または複数設定し、当該地点を通過するよう移動経路を算出することとしても良い。
【0025】
さらに、ECU8は、車両が交差点に接近した際、当該車両が設定された移動経路から外れる車線を走行中である場合には、移動経路の再設定を行う。具体的には、ECU8は、車両が交差点に接近した際、車載用カメラ7が接続されており、かつ、移動経路が設定されていることが確認されると、車載用カメラ7を動作させ、車両が走行中の車線の路面に標示された進行方向標示を撮影させる。そして、車載用カメラ7が生成した画像データを取得して画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。判別された車線の進行方向が、設定された移動経路の進行方向と一致しない場合、すなわち、車両が設定された移動経路を外れる車線を走行中である場合、ECU8は、車両が走行中の車線の進行方向に沿って移動経路の再設定を行い、再設定された移動経路をディスプレイ3の地図画像に重畳表示させるとともに、スピーカ9から移動経路の再設定が完了したことを示す案内音声を出力させる。
【0026】
メモリ10は、ECU8が各種動作を行う際の一時的な記憶領域として利用される。前述の記憶領域に関しては、例えばメモリカード等を利用することとしても良い。
【0027】
図2は、本実施形態の経路案内装置において、移動経路の再設定を行う処理に関するフローチャートである。本フローチャートの処理は、車両が設定された移動経路に沿って走行している場合において、当該車両が各交差点に接近するたびに実行される。
【0028】
ステップ201では、ECU8は、車載カメラ7が接続されているか否かを確認する。車載カメラ7の接続が確認された場合には、ステップ202へ進む。確認されなかった場合には、処理を終了する。ステップ202では、移動経路が設定されているか否かを確認する。移動経路が設定されている場合には、ステップ203へ進む。設定されていない場合には、処理を終了する。
【0029】
ステップ203では、車載用カメラ7を動作させ、車両が走行中の車線の路面に標示された進行方向標示を撮影させる。ステップ204では、車載用カメラ7から撮影された画像データを取得し、当該データに画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。進行方向標示を利用することで、車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを確実に判別できるのである。
【0030】
ステップ205では、ステップ204で判別された車線の進行方向と、設定された移動経路の進行方向が不一致であるか否か、すなわち、車両が設定された移動経路を外れる車線を走行中であるか否かを判定する。不一致である場合は、ステップ206へ進む。一致する場合は、処理を終了する。
【0031】
ステップ206では、ステップ204で判別された車線における進行方向に沿って移動経路の再設定を行うとともに、再設定された移動経路をディスプレイ3の地図画像に重畳表示させる。車両が走行中の車線における進行方向に沿って移動経路の再設定を行うことで、ユーザーは車両の運転を容易に継続することができるのである。
【0032】
ステップ207では、移動経路が再設定されたことを示す案内音声をスピーカ9から出力させ、処理を終了する。移動経路が再設定されたことを示す案内音声をスピーカ9から出力させることで、ユーザーは移動経路が再設定されたことを確実に把握することができる。
【0033】
このように、本実施形態の経路案内装置では、ECU8は、車両が交差点に接近した際、車両が走行中の車線の進行方向が、設定された移動経路の進行方向と一致しない場合、すなわち、車両が設定された移動経路を外れる車線を走行中である場合、移動経路の再設定を行う。これにより、本経路案内装置では、車両が交差点に接近した際、車両が設定された移動経路から外れる車線を走行中である場合、言い換えれば、車両が移動経路を外れる前の段階において、当該車両が移動経路を外れることが明らかになった時点で、移動経路の再設定を行う。そのため、車両が移動経路を外れることが明らかになった時点から、車両が移動経路を完全に外れるまでの間に、移動経路の再設定を行うことができる。その結果として、走行中の車両が設定された移動経路を外れた場合でも、再設定された新たな移動経路を即座に提示することができる。
【0034】
次に、本発明の変形例について説明する。前述した実施形態では、車載カメラ7は車両が走行中の車線の路面に標示された進行方向標示を撮影し、当該車線の進行方向を判別したが、本変形例では、車載カメラ7は車両が走行中の車線の路上に設置された進行方向標示を撮影し、当該車線の進行方向を判別する。上述した点が、本変形例のポイントである。
【0035】
本変形例の車載カメラ7は、車両が走行中の車線の路上に設置された進行方向標示を撮影して画像データを生成する。
【0036】
本変形例のECU8は、車両が走行中の車線の路上に設置された進行方向標示を撮影させ、車載用カメラ7が生成した画像データを取得して画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。
【0037】
その他の構成・動作は、前述した実施形態の場合と同様であるため、説明を省略する。
【0038】
また、本変形例の経路案内装置において、移動経路の再設定を行う処理に関するフローチャートについては、前述した実施形態における図2のフローチャートにおいて、車載用カメラ7を動作させ、車両が走行中の車線の路面に標示された進行方向標示を撮影させるステップに代えて、車載用カメラ7を動作させ、車両が走行中の車線の路上に設置された進行方向標示を撮影させるステップを設けることとなる。
【0039】
このように、本変形例の経路案内装置では、ECU8は、車両が走行中の車線の路上に設置された進行方向標示を撮影させ、車載用カメラ7が生成した画像データを取得して画像認識処理を施すとともに、撮影された進行方向標示から、車両の走行中の車線が右折車線、左折車線、直進車線のいずれであるかを判別する。このようにしても、走行中の車両が設定された移動経路を外れた場合に、再設定された新たな移動経路を即座に提示することができる。
【0040】
前述した各実施形態では、本装置はカーナビゲーション装置に組み込まれて動作したが、これに限定されるものではなく、道路表示機能を備えた機器であれば好適に利用できる。しかしながら、最も好適なのは、カーナビゲーション装置に組み込まれて動作した場合であることを言及しておく。
【図面の簡単な説明】
【0041】
【図1】本発明の一実施形態における走行車線案内装置の全体構成を示すブロック図である。
【図2】本実施形態の経路案内装置において、移動経路の再設定を行う処理に関するフローチャートである。
【符号の説明】
【0042】
1…位置検出器
11…地磁気センサ
12…ジャイロスコープ
13…距離センサ
14…GPS受信機
2…地図データ入力器
3…ディスプレイ
4…操作スイッチ
5…リモコン
6…リモコンセンサ
7…車載カメラ
8…ECU
9…スピーカ
10…メモリ
【特許請求の範囲】
【請求項1】
車両の移動経路を設定する経路設定手段と、
前記車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識する認識手段と、
前記車両が交差点に接近した際、前記認識手段の認識結果から、前記経路設定手段によって設定された移動経路から外れる車線を前記車両が走行中である場合には、前記経路設定手段に対し、移動経路を再設定するよう指示する制御手段とを備えることを特徴とする経路案内装置。
【請求項2】
前記認識手段は、前記車両が走行中の車線の路面に標示された進行方向標示を検出するとともに、検出された進行方向標示から、前記車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することを特徴とする請求項1記載の経路案内装置。
【請求項3】
前記認識手段は、前記車両が走行中の車線の路上に設置された進行方向標示を検出するとともに、検出された進行方向標示から、前記車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することを特徴とする請求項1記載の経路案内装置。
【請求項4】
前記経路設定手段は、前記認識手段の認識結果から、前記車両が走行中の車線における進行方向に沿って移動経路の再設定を行うことを特徴とする請求項1から請求項3のいずれかに記載の経路案内装置。
【請求項5】
前記経路設定手段が移動経路を再設定したことを報知する報知手段を設けることを特徴とする請求項1から請求項4のいずれかに記載の経路案内装置。
【請求項1】
車両の移動経路を設定する経路設定手段と、
前記車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識する認識手段と、
前記車両が交差点に接近した際、前記認識手段の認識結果から、前記経路設定手段によって設定された移動経路から外れる車線を前記車両が走行中である場合には、前記経路設定手段に対し、移動経路を再設定するよう指示する制御手段とを備えることを特徴とする経路案内装置。
【請求項2】
前記認識手段は、前記車両が走行中の車線の路面に標示された進行方向標示を検出するとともに、検出された進行方向標示から、前記車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することを特徴とする請求項1記載の経路案内装置。
【請求項3】
前記認識手段は、前記車両が走行中の車線の路上に設置された進行方向標示を検出するとともに、検出された進行方向標示から、前記車両が右折車線、左折車線、直進車線のうちのいずれの車線を走行中であるかを認識することを特徴とする請求項1記載の経路案内装置。
【請求項4】
前記経路設定手段は、前記認識手段の認識結果から、前記車両が走行中の車線における進行方向に沿って移動経路の再設定を行うことを特徴とする請求項1から請求項3のいずれかに記載の経路案内装置。
【請求項5】
前記経路設定手段が移動経路を再設定したことを報知する報知手段を設けることを特徴とする請求項1から請求項4のいずれかに記載の経路案内装置。
【図1】


【図2】
【図2】
【公開番号】特開2006−329725(P2006−329725A)
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願番号】特願2005−151587(P2005−151587)
【出願日】平成17年5月24日(2005.5.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願日】平成17年5月24日(2005.5.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]