
経路案内装置
【課題】現在位置や進むべき経路の方向は区別できても、同じ道路を複数回通行するような複雑な巡回経路における走行経路を把握し難いという課題を解決することのできる経路案内装置、および経路案内方法を提供する。
【解決手段】本発明の経路案内装置は、経路データに基づく出発地から目的地までの連続する経路線を地図に重畳させて表示する表示制御手段を備え、経路内に複数回通過する同一の区間が存在する場合、該区間に対応させて表示される複数の経路線について、基準となる基準線からのずらし幅をそれぞれ異なる幅に設定して表示する機能と、前記区間の通過を認識したときに、通過した経路に対応する経路線の前記ずらし幅を変更する機能とを有することを特徴とする。
【解決手段】本発明の経路案内装置は、経路データに基づく出発地から目的地までの連続する経路線を地図に重畳させて表示する表示制御手段を備え、経路内に複数回通過する同一の区間が存在する場合、該区間に対応させて表示される複数の経路線について、基準となる基準線からのずらし幅をそれぞれ異なる幅に設定して表示する機能と、前記区間の通過を認識したときに、通過した経路に対応する経路線の前記ずらし幅を変更する機能とを有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、設定された巡回経路を案内する経路案内装置に関するものである。
【背景技術】
【0002】
近年のナビゲーション装置は、現在地から目的地までの経路を算出する機能を備えるとともに、表示画面上に算出された経路を地図に重ねて表示する機能を備える。
こうしたナビゲーション装置は、道路上の標識や規制を調査する道路整備にも利用されている。
【0003】
道路整備をする際の現地調査においてはできるだけ効率的に、調査対象となっているすべての道路を通行する必要がある。理想的には、調査対象となっているそれぞれの道路を1回走行するだけで現地調査を完了することが望ましい。しかしながら、実際の道路は接続関係が複雑であるがゆえに、すべての道路を1回ずつ走行して全経路を走行することはほぼ不可能である。そのため、現地調査に利用される経路は同じ道路を複数回走行する巡回経路となることは避けられない。
【0004】
走行経路が巡回経路であるときは、車両が複数回走行する経路上の地点(重複経路地点)が発生する。車両は、その地点を最初に通過した後は右折し、2回目に通過した後は直進する、と云うように、通過回数によって異なる進行方向を取らなければならない。
【0005】
このような経路をわかりやすく表示するための方法が種々開発されている。例えば、特許文献1には、経路データと現在位置とを照合して現在位置より前方の進むべき経路部分を識別する順路判定手段を備え、識別された経路部分が経路上で区別できるように表示する方法が記載されている。また、特許文献2には、複数の経路を表示する際に、2以上の経路が同一の道路区間を重複して通っているときは、その重複部分の経路をずらして表示する方法が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−194175号公報
【特許文献2】特開2006−113460号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、特許文献1および特許文献2に記載の方法では、現在位置や進むべき経路の方向は区別できても、同じ道路を複数回通行するような複雑な巡回経路における走行経路を把握し難いという問題がある。
【0008】
本発明は、上記の課題を解決することのできる経路案内装置、および経路案内方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明は、設定された経路を案内する経路案内装置において、前記経路に関する経路データを記憶する経路データ記憶手段と、地図情報を記憶する地図情報記憶手段と、現在位置を検出する位置検出手段と、前記経路データに基づく出発地から目的地までの連続する経路線を地図に重畳させて表示する表示制御手段とを備え、前記表示制御手段は、更に、前記経路内に複数回通過する同一の区間が存在する場合、該区間に対応させて表示される複数の経路線について、基準となる基準線からのずらし幅をそれぞれ異なる幅に設定して表示する機能と、前記区間の通過を認識したときに、通過した経路に対応する経路線の前記ずらし幅を変更する機能とを有することを特徴とする。
【0010】
なお、上述した特徴は、本発明の特徴のすべてを列挙したものではなく、これらを要部とする構成(または方法)もまた発明となり得る。
【発明の効果】
【0011】
本発明によれば、同一の区間を複数回走行する経路が設定されたときは、その同一の区間に表示される複数の経路線を基準線からそれぞれずらして表示する。さらに、通過した区間に対応する経路線のずらし幅を変更して表示するため、複雑な巡回経路においても走行中の経路がわかりやすく、かつ、全体の経路順を把握することができる。
【図面の簡単な説明】
【0012】
【図1】経路案内装置構成図。
【図2】経路線のずらし幅計算の一例を示す図。
【図3】経路線のずらし表示の一例を示す図。
【図4】経路案内処理のフローチャート。
【図5】案内経路を説明する図。
【図6】ずらし幅計算後の案内経路を示す図。
【図7】ずらし幅再計算後の案内経路を示す図。
【図8】ずらし幅再計算後の案内経路を示す図。
【図9】右左折経路の表示方法の一例を示す図。
【図10】右左折経路の表示方法の一例を示す図。
【発明を実施するための形態】
【0013】
以下、本発明を具体化した実施形態を説明する。
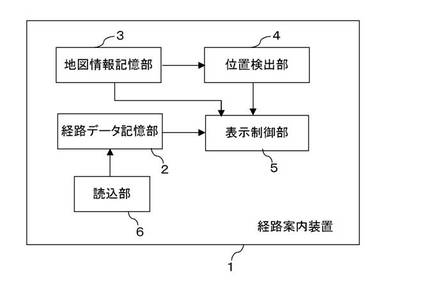
図1に示すように、本実施例における経路案内装置1は、経路データ記憶部2と、地図情報記憶部3と、位置検出部4と、表示制御部5と、読込部6とを備えている。
経路データ記憶部2には、道路整備の対象となっている領域内の全調査対象道路を巡回する巡回経路に関する経路データが記憶される。
【0014】
地図情報記憶部3には、道路データを含む地図情報が記憶されている。道路データは、リンクとノードとで構成される。
リンクは道路を表現したものである。リンクには、当該リンクを特定する固有のID番号、リンクの長さを示すリンク長、リンクの始端及び終端に存在するノード情報、リンクにおける複数地点の位置座標、路線名称、路線種別、および通行コストなど各種の属性情報が対応付けられている。
【0015】
また、ノードは、リンクの端点に存在する交差点等を表現したものである。ノードにも属性情報が対応付けられている。ノードの属性情報としては、ノードを特定する固有のID番号、位置座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID等がある。
なお、リンクおよびノードの属性情報である位置座標は、緯度、経度を用いることも、地図の左下を原点Oとする直交座標X,Yを用いることも可能である。
【0016】
位置検出部4は、例えば、移動体の進行方位を検出するジャイロ、車速を検出する車速センサ、GPS衛星からのGPS信号を検出するGPSセンサ等からなる。
GPSは、経路案内装置1の現在位置を測位する。具体的には、経路案内装置1が備える図示しないGPSアンテナによって受信された、複数のGPS衛星から送信される電波信号に基づいて経路案内装置1の現在位置(緯度及び経度)を測位する。このほかにも、現在位置は、DGPS(ディファレンシャルGPS)を利用した方法や、経路案内装置1の無線基地局の電波を利用した方法や、ジャイロセンサを利用若しくは併用した方法などによって測位してもよい。
【0017】
表示制御部5は、経路内に複数回通過する同一の区間が存在する場合、その区間に対応させて表示される複数の経路線を表示する。このとき、複数の経路線は、基準となる基準線からのずらし幅をそれぞれ変更して表示する。基準線は、経路に沿った線であればよい。本実施例では、各区間の道路に対応する線である道路リンクを基準線とし、経路上の自車両が今現在以降で、最初に通行する際の通過経路線ほど道路リンクからのずらし幅を小さく設定する例を挙げて説明する。なお、基準線としては、経路上の道路を表現するための道路ポリゴンを採用してもよい。
【0018】
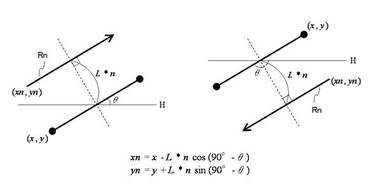
表示制御部5によって設定される経路線のずらし幅は、例えば、図2に示すような計算式によって得ることができる。図2において、道路リンクの座標が(x,y)、道路リンクを通過する方向と水平線Hとのなす角度がθであるとき、経路線は(xn,yn)から進行方向へ伸びる線Rnとなる。図2におけるLは任意の値を設定することができ、nは各道路リンクにおける経路の通過順序に基づいた整数とする。このときnは、道路リンクを通過する方向毎に別々に通行回数をカウントする。
【0019】
読込部6は、外部の装置で探索された所定領域における巡回経路の経路データを読込む。経路データを読込む方法としては、記憶媒体からの読込や、通信による受信等が挙げられる。
【0020】
次に、表示制御部5によって表示される経路線の表示方法について説明する。
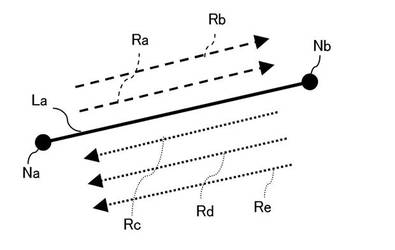
図3は、道路リンクLaをノードNaからノードNbの方向へ2回、ノードNbからノードNaの方向へ3回通過する場合の経路線のずらし例である。
本例の場合の各経路線におけるnの値(以下「n値」と言う)は道路リンクの通過方向毎に別々に通過回数をカウントするので、経路線RaおよびRcのn値は1、経路線RbおよびRdのn値は2、経路線Reのn値は3となり、図2の計算式を用いて計算する。計算の結果、経路線Ra〜Reのずらし幅は図3に示すように、リンクLaをNaからノードNbの方向へ通過する経路はRa、Rbの順にリンクLaに近い側から設定され、ノードNbからノードNaの方向へ通過する経路はRc,Rd、Reの順にリンクLaに近い側から設定される。このようにして、経路全体の各リンクに対して決められたずらし幅だけ線分をずらす。ずらした各線分を、始点側から順になめらかに接続していくことで1本の経路線として表示される。
【0021】
また、表示制御部5は、移動体がリンクを通過したことを認識したときに、通過したリンクに対応する経路線のずらし幅を変更して再表示を行う。ずらし幅の変更は、例えば、通過した経路に対応する経路線のn値を最大値とし、その他の同方向に通過している経路線のn値を1ずつ小さくする方法が挙げられる。こうすることによって、経路上の自車両が今現在以降で、最初に通行する際の通過経路が、常に通過する道路に最も近い位置で表示されることになる。
【0022】
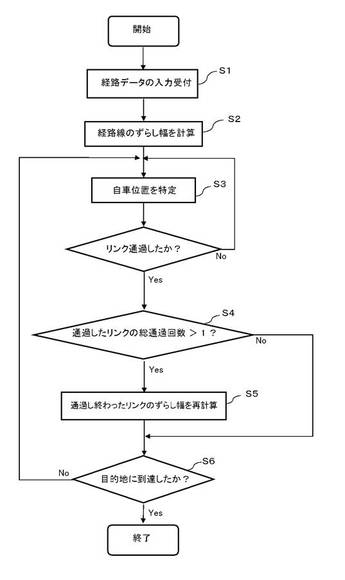
次に、本発明の経路案内装置1を用いた処理の流れを説明する。図4は、本実施例における図1に示す経路案内装置1の全体の動作を示すフローチャートである。
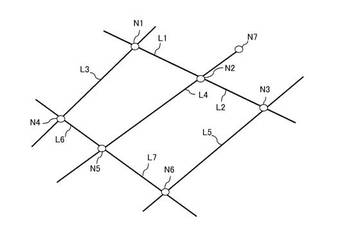
まず、外部の記憶媒体から読込部6へと移動体の図5に示すネットワークに対応する道路を走行する経路を指定する経路データが読込まれ、経路データ記憶部2へ記憶される(ステップS1)。
【0023】
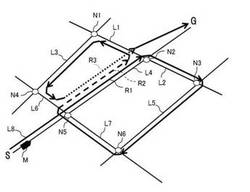
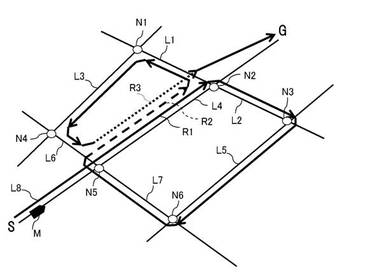
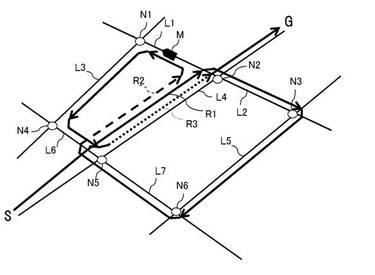
表示制御部5は、経路データ記憶部2から経路データを読み出し、この経路データの経路線のずらし幅の計算を行う(ステップS2)。具体的には、表示制御部5は、図6に示すように、始点S、ノードN5、N2、N3、N6、N5、N2、N1、N4、N5、N2、終点Gの順に走行する経路に関する情報が経路データ記憶部2から読み出されると、図2に示す計算式によってずらし幅の計算を行う。そしてこの計算の結果が反映された経路線が設定される。例えば、リンクL4に着目すると、リンクL4のN5からN2の方向への総通過回数は3回なので、n値の最大値は3となる。また、経路R1、R2、R3の順で通過するので、図2の計算式にR1ならばn=1、R2ならばn=2、R3ならばn=3を適用してそれぞれの経路線のずらし幅を算出する。その結果、経路線R1〜R3は、図6に示すようにリンクL4通過する経路はR1,R2、R3の順にリンクL4に近い側から設定される。
【0024】
表示制御部5によって経路線が設定された後、移動体Mが始点Sから走行を開始すると、経路案内装置1は、位置検出部4の情報に基づいて移動体Mの現在位置を算出し、地図情報記憶部3から読み出した地図情報を用いて地図上の現在位置を特定する(ステップS3)。
【0025】
次に、表示制御部5は、経路データ記憶部2から読み出した経路データと移動体Mの位置とから、移動体Mが経路上のどの位置を走行しているかを判定する。そして、表示制御部5は、移動体Mがリンクを1本通過するごとに、通過したリンクの同方向の総通過回数を判定する(ステップS4)。ステップS4にて判定したリンクの同方向の総通過回数が1より大きいとき、表示制御部5は、通過したリンクを通行する経路線のずらし幅を再計算する(ステップS5)。
【0026】
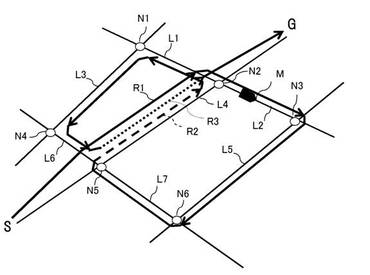
例えば、始点Sを出発した移動体MがノードN5→ノードN2の経路を走行してリンクL4を通過したことを判定すると、表示制御部5は、リンクL4のノードN5からノードN2の方向への総通過回数を判定する。リンクL4のノードN5からノードN2の方向への総通過回数は3回であり、これは1より大きいので、表示制御部5は、リンクL4を通行する経路線R1〜R3の表示ずらし幅を再計算する。経路線R1〜R3のずらし幅の再計算は、上述のように通過した経路に対応する経路線R1のn値を最大値3とし、その他の経路線R2およびR3のn値を1ずつ小さくすることによって行われる。再計算された経路線は図7に示すようにリンクL4通過する経路はR2,R3、R1の順にリンクL4に近い側から設定される。
【0027】
通過したリンクL4に対応する経路線の再計算が行われた後、移動体Mが目的地Gに到達したかを判定し(ステップS6)、到達していないと判定した場合は位置検出部4の情報から移動体Mの現在位置を再度算出し(ステップS3)、通過したリンクの総通過回数を判定する(ステップS4)。表示制御部5は、リンクL2、L5およびL7をそれぞれ通過したときに総通過回数を判定するが、リンクL2、L5およびL7の総通過回数はいずれも1回なので、経路線ずらし幅の再計算(ステップS5)へは進まず、移動体Mの現在位置を再度特定する(ステップS3)。
【0028】
次に、移動体MがノードN6→ノードN5→ノードN2経路を走行してリンクL4を通過したことを判定すると、表示制御部5は、リンクL4の総通過回数を判定し、リンクL4を通行する経路線R1〜R3の表示ずらし幅を再度計算する。経路線R1〜R3の表示ずらし幅の再計算は、上述のように通過した経路に対応する経路線R2のn値を最大値3とし、その他の経路線R3およびR1のn値を1ずつ小さくすることによって行われる。再計算された経路線は図8に示すように、リンクL4を通過する経路はR3,R1、R2の順にリンクL4に近い側から設定され、表示される。
【0029】
このように、本発明の経路案内装置1では、経路全体が表示されるとともに、同一の経路を複数回走行する場合でも、現在進行している経路が基準線に最も近い状態で表示される。そのため、運転者は、常に最も基準線に近い位置に表示されている経路線を確認すればどの経路を走行中であるかがわかる。従って、巡回経路を走行する運転者は、この表示から、進むべき方向を明確に知ることができる。
【0030】
(変形例)
表示制御部5は、表示させる経路の以下のような制御を行うこともできる。
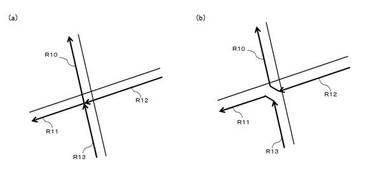
右左折の際は経路線の角を丸めて表示することによって、複数の経路線が重なる場合でも進入経路と退出経路との関係が判別しやすくなる。例えば、図9(a)に示す表示形態の場合、経路線R10および経路線R11は、経路線R12または経路線R13のいずれからの進入なのかが判別し難い。そこで、図9(b)に示すように、右左折の際は経路線の角を丸めて表示することで、他の経路と交差しないように表示できるので、経路線R12→経路線R10および経路線R13→経路線R11と通行することが判別しやすくなる。
【0031】
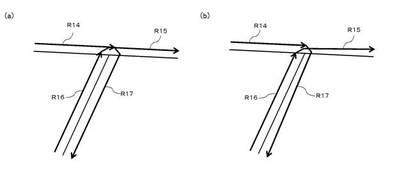
また、T字路での右折の際は右折時の経路のずらし幅を小さくすることによって、複数の経路線が重なる場合でも進入経路と退出経路との関係が判別しやすくなる。例えば、図10(a)に示す表示形態の場合、経路線R15がいずれの経路線からの進入なのかが判別し難い。そこで、図10(b)に示すように、右折する経路線R16→経路線R15における経路線R15の基点側のずらし幅を小さくして表示することによって、進入経路と退出経路との関係が判別しやすくなる。
【0032】
なお、本実施例では、現在位置の一定距離前方の経路部分を、経路全体の色と異なる色で表示するなどして、次に進むべき経路をよりわかりやすく表示することが可能である。また色ではなく、一方を実線、他方を点線にするなど線種を違えたり、線の太さを違えたり、また、一定距離前方の経路部分だけを流れ表示にするなどの変形も可能である。
【0033】
また、経路案内装置1は、トラックによる配送など自動車等で荷物を配送する場合にも利用することができる。さらには、自動車で得意先をまわる営業セールス、自動車で移動しながらの宣伝広報活動、選挙活動、介護サービスなどのように、効率的に複数の場所を巡回する場合にも利用することができる。
【符号の説明】
【0034】
1…経路案内装置、
2…経路データ記憶部、
3…地図情報記憶部、
4…位置検出部、
5…表示制御部、
6…読込部。
【技術分野】
【0001】
本発明は、設定された巡回経路を案内する経路案内装置に関するものである。
【背景技術】
【0002】
近年のナビゲーション装置は、現在地から目的地までの経路を算出する機能を備えるとともに、表示画面上に算出された経路を地図に重ねて表示する機能を備える。
こうしたナビゲーション装置は、道路上の標識や規制を調査する道路整備にも利用されている。
【0003】
道路整備をする際の現地調査においてはできるだけ効率的に、調査対象となっているすべての道路を通行する必要がある。理想的には、調査対象となっているそれぞれの道路を1回走行するだけで現地調査を完了することが望ましい。しかしながら、実際の道路は接続関係が複雑であるがゆえに、すべての道路を1回ずつ走行して全経路を走行することはほぼ不可能である。そのため、現地調査に利用される経路は同じ道路を複数回走行する巡回経路となることは避けられない。
【0004】
走行経路が巡回経路であるときは、車両が複数回走行する経路上の地点(重複経路地点)が発生する。車両は、その地点を最初に通過した後は右折し、2回目に通過した後は直進する、と云うように、通過回数によって異なる進行方向を取らなければならない。
【0005】
このような経路をわかりやすく表示するための方法が種々開発されている。例えば、特許文献1には、経路データと現在位置とを照合して現在位置より前方の進むべき経路部分を識別する順路判定手段を備え、識別された経路部分が経路上で区別できるように表示する方法が記載されている。また、特許文献2には、複数の経路を表示する際に、2以上の経路が同一の道路区間を重複して通っているときは、その重複部分の経路をずらして表示する方法が記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−194175号公報
【特許文献2】特開2006−113460号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、特許文献1および特許文献2に記載の方法では、現在位置や進むべき経路の方向は区別できても、同じ道路を複数回通行するような複雑な巡回経路における走行経路を把握し難いという問題がある。
【0008】
本発明は、上記の課題を解決することのできる経路案内装置、および経路案内方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明は、設定された経路を案内する経路案内装置において、前記経路に関する経路データを記憶する経路データ記憶手段と、地図情報を記憶する地図情報記憶手段と、現在位置を検出する位置検出手段と、前記経路データに基づく出発地から目的地までの連続する経路線を地図に重畳させて表示する表示制御手段とを備え、前記表示制御手段は、更に、前記経路内に複数回通過する同一の区間が存在する場合、該区間に対応させて表示される複数の経路線について、基準となる基準線からのずらし幅をそれぞれ異なる幅に設定して表示する機能と、前記区間の通過を認識したときに、通過した経路に対応する経路線の前記ずらし幅を変更する機能とを有することを特徴とする。
【0010】
なお、上述した特徴は、本発明の特徴のすべてを列挙したものではなく、これらを要部とする構成(または方法)もまた発明となり得る。
【発明の効果】
【0011】
本発明によれば、同一の区間を複数回走行する経路が設定されたときは、その同一の区間に表示される複数の経路線を基準線からそれぞれずらして表示する。さらに、通過した区間に対応する経路線のずらし幅を変更して表示するため、複雑な巡回経路においても走行中の経路がわかりやすく、かつ、全体の経路順を把握することができる。
【図面の簡単な説明】
【0012】
【図1】経路案内装置構成図。
【図2】経路線のずらし幅計算の一例を示す図。
【図3】経路線のずらし表示の一例を示す図。
【図4】経路案内処理のフローチャート。
【図5】案内経路を説明する図。
【図6】ずらし幅計算後の案内経路を示す図。
【図7】ずらし幅再計算後の案内経路を示す図。
【図8】ずらし幅再計算後の案内経路を示す図。
【図9】右左折経路の表示方法の一例を示す図。
【図10】右左折経路の表示方法の一例を示す図。
【発明を実施するための形態】
【0013】
以下、本発明を具体化した実施形態を説明する。
図1に示すように、本実施例における経路案内装置1は、経路データ記憶部2と、地図情報記憶部3と、位置検出部4と、表示制御部5と、読込部6とを備えている。
経路データ記憶部2には、道路整備の対象となっている領域内の全調査対象道路を巡回する巡回経路に関する経路データが記憶される。
【0014】
地図情報記憶部3には、道路データを含む地図情報が記憶されている。道路データは、リンクとノードとで構成される。
リンクは道路を表現したものである。リンクには、当該リンクを特定する固有のID番号、リンクの長さを示すリンク長、リンクの始端及び終端に存在するノード情報、リンクにおける複数地点の位置座標、路線名称、路線種別、および通行コストなど各種の属性情報が対応付けられている。
【0015】
また、ノードは、リンクの端点に存在する交差点等を表現したものである。ノードにも属性情報が対応付けられている。ノードの属性情報としては、ノードを特定する固有のID番号、位置座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID等がある。
なお、リンクおよびノードの属性情報である位置座標は、緯度、経度を用いることも、地図の左下を原点Oとする直交座標X,Yを用いることも可能である。
【0016】
位置検出部4は、例えば、移動体の進行方位を検出するジャイロ、車速を検出する車速センサ、GPS衛星からのGPS信号を検出するGPSセンサ等からなる。
GPSは、経路案内装置1の現在位置を測位する。具体的には、経路案内装置1が備える図示しないGPSアンテナによって受信された、複数のGPS衛星から送信される電波信号に基づいて経路案内装置1の現在位置(緯度及び経度)を測位する。このほかにも、現在位置は、DGPS(ディファレンシャルGPS)を利用した方法や、経路案内装置1の無線基地局の電波を利用した方法や、ジャイロセンサを利用若しくは併用した方法などによって測位してもよい。
【0017】
表示制御部5は、経路内に複数回通過する同一の区間が存在する場合、その区間に対応させて表示される複数の経路線を表示する。このとき、複数の経路線は、基準となる基準線からのずらし幅をそれぞれ変更して表示する。基準線は、経路に沿った線であればよい。本実施例では、各区間の道路に対応する線である道路リンクを基準線とし、経路上の自車両が今現在以降で、最初に通行する際の通過経路線ほど道路リンクからのずらし幅を小さく設定する例を挙げて説明する。なお、基準線としては、経路上の道路を表現するための道路ポリゴンを採用してもよい。
【0018】
表示制御部5によって設定される経路線のずらし幅は、例えば、図2に示すような計算式によって得ることができる。図2において、道路リンクの座標が(x,y)、道路リンクを通過する方向と水平線Hとのなす角度がθであるとき、経路線は(xn,yn)から進行方向へ伸びる線Rnとなる。図2におけるLは任意の値を設定することができ、nは各道路リンクにおける経路の通過順序に基づいた整数とする。このときnは、道路リンクを通過する方向毎に別々に通行回数をカウントする。
【0019】
読込部6は、外部の装置で探索された所定領域における巡回経路の経路データを読込む。経路データを読込む方法としては、記憶媒体からの読込や、通信による受信等が挙げられる。
【0020】
次に、表示制御部5によって表示される経路線の表示方法について説明する。
図3は、道路リンクLaをノードNaからノードNbの方向へ2回、ノードNbからノードNaの方向へ3回通過する場合の経路線のずらし例である。
本例の場合の各経路線におけるnの値(以下「n値」と言う)は道路リンクの通過方向毎に別々に通過回数をカウントするので、経路線RaおよびRcのn値は1、経路線RbおよびRdのn値は2、経路線Reのn値は3となり、図2の計算式を用いて計算する。計算の結果、経路線Ra〜Reのずらし幅は図3に示すように、リンクLaをNaからノードNbの方向へ通過する経路はRa、Rbの順にリンクLaに近い側から設定され、ノードNbからノードNaの方向へ通過する経路はRc,Rd、Reの順にリンクLaに近い側から設定される。このようにして、経路全体の各リンクに対して決められたずらし幅だけ線分をずらす。ずらした各線分を、始点側から順になめらかに接続していくことで1本の経路線として表示される。
【0021】
また、表示制御部5は、移動体がリンクを通過したことを認識したときに、通過したリンクに対応する経路線のずらし幅を変更して再表示を行う。ずらし幅の変更は、例えば、通過した経路に対応する経路線のn値を最大値とし、その他の同方向に通過している経路線のn値を1ずつ小さくする方法が挙げられる。こうすることによって、経路上の自車両が今現在以降で、最初に通行する際の通過経路が、常に通過する道路に最も近い位置で表示されることになる。
【0022】
次に、本発明の経路案内装置1を用いた処理の流れを説明する。図4は、本実施例における図1に示す経路案内装置1の全体の動作を示すフローチャートである。
まず、外部の記憶媒体から読込部6へと移動体の図5に示すネットワークに対応する道路を走行する経路を指定する経路データが読込まれ、経路データ記憶部2へ記憶される(ステップS1)。
【0023】
表示制御部5は、経路データ記憶部2から経路データを読み出し、この経路データの経路線のずらし幅の計算を行う(ステップS2)。具体的には、表示制御部5は、図6に示すように、始点S、ノードN5、N2、N3、N6、N5、N2、N1、N4、N5、N2、終点Gの順に走行する経路に関する情報が経路データ記憶部2から読み出されると、図2に示す計算式によってずらし幅の計算を行う。そしてこの計算の結果が反映された経路線が設定される。例えば、リンクL4に着目すると、リンクL4のN5からN2の方向への総通過回数は3回なので、n値の最大値は3となる。また、経路R1、R2、R3の順で通過するので、図2の計算式にR1ならばn=1、R2ならばn=2、R3ならばn=3を適用してそれぞれの経路線のずらし幅を算出する。その結果、経路線R1〜R3は、図6に示すようにリンクL4通過する経路はR1,R2、R3の順にリンクL4に近い側から設定される。
【0024】
表示制御部5によって経路線が設定された後、移動体Mが始点Sから走行を開始すると、経路案内装置1は、位置検出部4の情報に基づいて移動体Mの現在位置を算出し、地図情報記憶部3から読み出した地図情報を用いて地図上の現在位置を特定する(ステップS3)。
【0025】
次に、表示制御部5は、経路データ記憶部2から読み出した経路データと移動体Mの位置とから、移動体Mが経路上のどの位置を走行しているかを判定する。そして、表示制御部5は、移動体Mがリンクを1本通過するごとに、通過したリンクの同方向の総通過回数を判定する(ステップS4)。ステップS4にて判定したリンクの同方向の総通過回数が1より大きいとき、表示制御部5は、通過したリンクを通行する経路線のずらし幅を再計算する(ステップS5)。
【0026】
例えば、始点Sを出発した移動体MがノードN5→ノードN2の経路を走行してリンクL4を通過したことを判定すると、表示制御部5は、リンクL4のノードN5からノードN2の方向への総通過回数を判定する。リンクL4のノードN5からノードN2の方向への総通過回数は3回であり、これは1より大きいので、表示制御部5は、リンクL4を通行する経路線R1〜R3の表示ずらし幅を再計算する。経路線R1〜R3のずらし幅の再計算は、上述のように通過した経路に対応する経路線R1のn値を最大値3とし、その他の経路線R2およびR3のn値を1ずつ小さくすることによって行われる。再計算された経路線は図7に示すようにリンクL4通過する経路はR2,R3、R1の順にリンクL4に近い側から設定される。
【0027】
通過したリンクL4に対応する経路線の再計算が行われた後、移動体Mが目的地Gに到達したかを判定し(ステップS6)、到達していないと判定した場合は位置検出部4の情報から移動体Mの現在位置を再度算出し(ステップS3)、通過したリンクの総通過回数を判定する(ステップS4)。表示制御部5は、リンクL2、L5およびL7をそれぞれ通過したときに総通過回数を判定するが、リンクL2、L5およびL7の総通過回数はいずれも1回なので、経路線ずらし幅の再計算(ステップS5)へは進まず、移動体Mの現在位置を再度特定する(ステップS3)。
【0028】
次に、移動体MがノードN6→ノードN5→ノードN2経路を走行してリンクL4を通過したことを判定すると、表示制御部5は、リンクL4の総通過回数を判定し、リンクL4を通行する経路線R1〜R3の表示ずらし幅を再度計算する。経路線R1〜R3の表示ずらし幅の再計算は、上述のように通過した経路に対応する経路線R2のn値を最大値3とし、その他の経路線R3およびR1のn値を1ずつ小さくすることによって行われる。再計算された経路線は図8に示すように、リンクL4を通過する経路はR3,R1、R2の順にリンクL4に近い側から設定され、表示される。
【0029】
このように、本発明の経路案内装置1では、経路全体が表示されるとともに、同一の経路を複数回走行する場合でも、現在進行している経路が基準線に最も近い状態で表示される。そのため、運転者は、常に最も基準線に近い位置に表示されている経路線を確認すればどの経路を走行中であるかがわかる。従って、巡回経路を走行する運転者は、この表示から、進むべき方向を明確に知ることができる。
【0030】
(変形例)
表示制御部5は、表示させる経路の以下のような制御を行うこともできる。
右左折の際は経路線の角を丸めて表示することによって、複数の経路線が重なる場合でも進入経路と退出経路との関係が判別しやすくなる。例えば、図9(a)に示す表示形態の場合、経路線R10および経路線R11は、経路線R12または経路線R13のいずれからの進入なのかが判別し難い。そこで、図9(b)に示すように、右左折の際は経路線の角を丸めて表示することで、他の経路と交差しないように表示できるので、経路線R12→経路線R10および経路線R13→経路線R11と通行することが判別しやすくなる。
【0031】
また、T字路での右折の際は右折時の経路のずらし幅を小さくすることによって、複数の経路線が重なる場合でも進入経路と退出経路との関係が判別しやすくなる。例えば、図10(a)に示す表示形態の場合、経路線R15がいずれの経路線からの進入なのかが判別し難い。そこで、図10(b)に示すように、右折する経路線R16→経路線R15における経路線R15の基点側のずらし幅を小さくして表示することによって、進入経路と退出経路との関係が判別しやすくなる。
【0032】
なお、本実施例では、現在位置の一定距離前方の経路部分を、経路全体の色と異なる色で表示するなどして、次に進むべき経路をよりわかりやすく表示することが可能である。また色ではなく、一方を実線、他方を点線にするなど線種を違えたり、線の太さを違えたり、また、一定距離前方の経路部分だけを流れ表示にするなどの変形も可能である。
【0033】
また、経路案内装置1は、トラックによる配送など自動車等で荷物を配送する場合にも利用することができる。さらには、自動車で得意先をまわる営業セールス、自動車で移動しながらの宣伝広報活動、選挙活動、介護サービスなどのように、効率的に複数の場所を巡回する場合にも利用することができる。
【符号の説明】
【0034】
1…経路案内装置、
2…経路データ記憶部、
3…地図情報記憶部、
4…位置検出部、
5…表示制御部、
6…読込部。
【特許請求の範囲】
【請求項1】
設定された経路を案内する経路案内装置において、
前記経路に関する経路データを記憶する経路データ記憶手段と、
地図情報を記憶する地図情報記憶手段と、
現在位置を検出する位置検出手段と、
前記経路データに基づく出発地から目的地までの連続する経路線を地図に重畳させて表示する表示制御手段と
を備え、前記表示制御手段は、更に、
前記経路内に複数回通過する同一の区間が存在する場合、該区間に対応させて表示される複数の経路線について、基準となる基準線からのずらし幅をそれぞれ異なる幅に設定して表示する機能と、
前記区間の通過を認識したときに、通過した経路に対応する経路線の前記ずらし幅を変更する機能と
を有することを特徴とする経路案内装置。
【請求項2】
前記表示制御手段は、前記区間において、最初に通行する経路に対応する経路線ほど前記基準線からのずらし幅を小さく設定することを特徴とする請求項1に記載の経路案内装置。
【請求項3】
前記基準線は、前記区間の道路に対応する線であることを特徴とする請求項1又は請求項2に記載の経路案内装置。
【請求項1】
設定された経路を案内する経路案内装置において、
前記経路に関する経路データを記憶する経路データ記憶手段と、
地図情報を記憶する地図情報記憶手段と、
現在位置を検出する位置検出手段と、
前記経路データに基づく出発地から目的地までの連続する経路線を地図に重畳させて表示する表示制御手段と
を備え、前記表示制御手段は、更に、
前記経路内に複数回通過する同一の区間が存在する場合、該区間に対応させて表示される複数の経路線について、基準となる基準線からのずらし幅をそれぞれ異なる幅に設定して表示する機能と、
前記区間の通過を認識したときに、通過した経路に対応する経路線の前記ずらし幅を変更する機能と
を有することを特徴とする経路案内装置。
【請求項2】
前記表示制御手段は、前記区間において、最初に通行する経路に対応する経路線ほど前記基準線からのずらし幅を小さく設定することを特徴とする請求項1に記載の経路案内装置。
【請求項3】
前記基準線は、前記区間の道路に対応する線であることを特徴とする請求項1又は請求項2に記載の経路案内装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−180101(P2011−180101A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−47386(P2010−47386)
【出願日】平成22年3月4日(2010.3.4)
【出願人】(597151563)株式会社ゼンリン (155)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月4日(2010.3.4)
【出願人】(597151563)株式会社ゼンリン (155)
【Fターム(参考)】
[ Back to top ]