
経路案内装置
【課題】新設された道路の利点を考慮した経路案内ができる経路案内装置を提供する。
【解決手段】経路案内装置1は、記憶部11に記憶されている道路のリンクに関する情報の中に低減期間終了日等の情報を追加しておく。そして、経路探索処理においてリンクに関する情報が参照された場合は、その情報に基づいて当該リンクの移動コストを低減するための新設係数を算出し、その新設係数に基づいて移動コストを補正する。補正により新設された道路の移動コストが低減され、推奨経路に含められやすくなる。このように探索した推奨経路に基づいて経路案内を行うことにより、新設された道路の利点を考慮した経路案内ができる。
【解決手段】経路案内装置1は、記憶部11に記憶されている道路のリンクに関する情報の中に低減期間終了日等の情報を追加しておく。そして、経路探索処理においてリンクに関する情報が参照された場合は、その情報に基づいて当該リンクの移動コストを低減するための新設係数を算出し、その新設係数に基づいて移動コストを補正する。補正により新設された道路の移動コストが低減され、推奨経路に含められやすくなる。このように探索した推奨経路に基づいて経路案内を行うことにより、新設された道路の利点を考慮した経路案内ができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、経路案内装置に関する。
【背景技術】
【0002】
従来、地図データを差分更新する経路案内装置が知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−249624号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
新設された道路は、その存在の周知度が低いために交通量が少なかったり、表面の凹凸が少なかったりするため、車両の走行が円滑になされる。従来技術では、地図データが更新され、新設された道路が地図データに追加されたとしても、新設された道路の利点を十分に考慮した経路案内ができないおそれがあった。
【課題を解決するための手段】
【0005】
本発明の経路案内装置は、道路の移動コストに関する情報を含む道路情報を記憶する道路情報記憶手段と、道路情報における各道路の移動コストのうち新設された道路の移動コストを低減するコスト低減手段と、目的地を特定する目的地特定手段と、道路情報における移動コストおよびコスト低減手段により低減された移動コストに基づいて、目的地に到達するまでの移動に要する移動コストが小さい経路を特定する経路特定手段と、経路特定手段により特定される経路に従って車両を案内する経路案内手段とを備えることを特徴とする。
【発明の効果】
【0006】
新設された道路の利点を考慮した経路案内ができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態である経路案内装置の構成の一例である。
【図2】本発明の一実施形態において使用する道路の評価値について説明するための図である。
【図3】本発明が注目する新設された道路に関して説明するための図である。
【図4】本発明の一実施形態における地図データについて説明するための図である。
【図5】本発明の一実施形態である経路案内装置における経路探索処理の一例を示すフローチャートである。
【図6】本発明の一実施形態における経路探索処理について説明するための図である。
【図7】本発明の一実施形態における経路探索処理について説明するための図である。
【図8】本発明の一実施形態における経路探索処理について説明するための図である。
【図9】本発明の一実施形態における経路探索処理について説明するための図である。
【図10】本発明の一実施形態における経路探索処理について説明するための図である。
【図11】本発明の一実施形態における経路探索処理について説明するための図である。
【図12】本発明の一実施形態における経路探索処理について説明するための図である。
【図13】本発明の一実施形態における経路探索処理について説明するための図である。
【図14】本発明の一実施形態における経路探索処理について説明するための図である。
【図15】本発明の一実施形態における経路探索処理について説明するための図である。
【図16】本発明の一実施形態における経路探索処理について説明するための図である。
【図17】本発明の一実施形態における経路探索処理について説明するための図である。
【図18】本発明の一実施形態における経路探索処理について説明するための図である。
【発明を実施するための形態】
【0008】
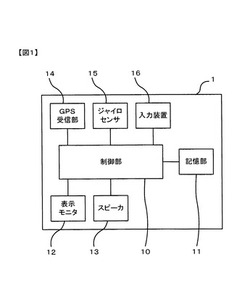
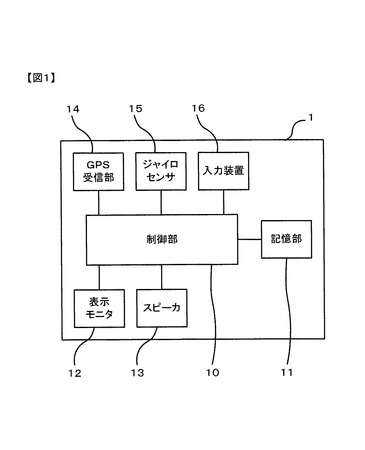
本発明の一実施の形態による経路案内装置の構成について、図1を用いて説明する。図1の経路案内装置1は、制御部10、記憶部11、表示モニタ12、スピーカ13、GPS受信部14、ジャイロセンサ15、および入力装置16を備える。経路案内装置1は、車両と有線または無線で接続されており、車両の走行速度などの情報を取得することができる。経路案内装置1は、ブラケットや吸盤などにより車両などに固定してもよい。以降、経路案内装置1を搭載した車両のことを搭載車両と記載する。
【0009】
図1の制御部10は、経路案内装置1を動作させるための各種処理を実行するための部分であり、マイクロプロセッサ、各種周辺回路、RAM、ROMなどによって構成される。制御部10により実行される処理には、たとえば経路探索処理や、マップマッチング処理、経路案内処理などがある。これらの処理については、多くの手法が公知となっている。
【0010】
制御部10が実行する経路探索処理とは、予め設定された探索条件に基づいて、搭載車両の現在位置などの出発地から目的地までの推奨経路を探索するものである。目的地は、経路案内装置1の利用者が入力装置16を介して入力すればよい。搭載車両の現在位置は、制御部10がGPS受信部14を利用して算出することにより特定できる。経路の探索は、記憶部11に記憶されている地図データに基づいて実行される。なお、推奨経路を探索するとき、目的地だけでなく経由地を選択することとしてもよい。また、出発地は、搭載車両の現在位置だけでなくユーザが入力装置16を介して入力したものを用いてもよい。
【0011】
探索条件は、従来から様々なものが知られており、たとえば目的地に到達するまでに要する移動コストが最も少ない経路を探索するものなどがある。以降の説明では、経路探索処理の探索条件が移動コストの最も少ない経路を探索するものに設定されているものとする。
【0012】
制御部10が実行する経路案内処理とは、経路探索処理により探索された推奨経路に沿って運転手が搭載車両を運転できるように、表示モニタ12やスピーカ13などを利用して運転手に案内を行う処理である。制御部10は、表示モニタ12に搭載車両の位置を示す印を付した地図を表示し、スピーカ13から音声案内を出力する。
【0013】
図1の記憶部11は、ハードディスクなどを含む記憶媒体の集まりであり、道路地図を表す地図データや、アイコン等の画像データ、音声データを含む各種データが記憶されている。記憶部11に記憶されているデータは、必要に応じて制御部10により記憶部11から読み出され、制御部10が実行する様々な処理や制御に利用される。
【0014】
記憶部11に記憶される地図データには、地図上の地点を表すノードに関する情報と、ノードが表す地点と地点の間を繋ぐ道路を表すリンクに関する情報とが含まれる。ノードに関する情報には、位置情報や地点名称に関する情報などが含まれる。リンクに関する情報には、リンクが表す道路の長さであるリンク長や、道路種別、車両の通行が許可されている方向などの情報が含まれる。これらの情報に基づいて経路探索処理や、マップマッチング処理、経路案内処理などが実行される。
【0015】
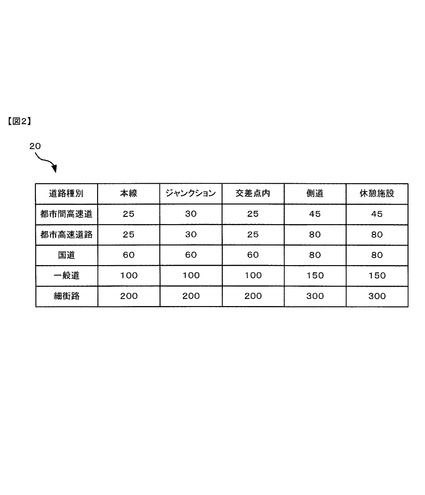
各リンクを通過するのに要する移動コストは、リンクに関する情報に基づいて算出される。たとえば、各リンクのリンク長に図2に示す評価値を乗ずることにより算出することができる。図2の評価値表20は、リンクの道路種別にそれぞれ対応するリンクの評価値を示したものである。たとえば、リンクの道路種別が「国道」の「本線」の場合は評価値「60」であり、「一般道」の「本線」は評価値「100」である。すなわち、一般道の本線は国道の本線とリンク長が同じであっても、移動コストは国道の本線の5/3倍となる。
【0016】
制御部10は、記憶部11に新たなデータを記憶することや既に記憶されている地図データなどのデータを更新することができる。たとえば、新しく道路が作られた場合、新しいノードに関する情報やリンクに関する情報を地図データに追加することができる。地図データの更新方法には、HDD11に記憶している地図データと最新の地図データとの差分を更新する方法や、地図データファイルを置き換える方法などがある。地図データの更新に用いるデータは、DVD(図示せず)やUSBメモリ(図示せず)などの電子メディアから取得してもよいし、ナビゲーション装置1の外部からダウンロードすることにより取得してもよい。本実施の形態では、地図データの差分更新により新設された道路に関するノードやリンクの情報を地図データに追加する。追加した地図データの具体例については後述する。
【0017】
図1の表示モニタ12は、様々な画像や映像などを表示するための装置であり、液晶ディスプレイ等が用いられる。制御部10の制御に基づいて表示モニタ12に地図や搭載車両の現在位置を表示することにより、経路案内装置1は搭載車両を誘導する案内表示を行うことができる。
【0018】
図1のスピーカ13は、制御部10の制御により、搭載車両の走行に関する様々な音声情報を出力する。たとえば、制御部10により探索された経路に従って搭載車両を目的地まで案内するための案内用の音声や、警告音などを出力する。
【0019】
図1のGPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、搭載車両の現在位置と現在日時を特定するための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、制御部10は、所定数以上のGPS衛星からのGPS信号により、これらの情報に基づいて搭載車両の現在位置および現在日時を算出することができる。制御部10は、GPS信号に基づいて算出された搭載車両の現在位置の時間変化を算出し、その搭載車両の現在位置の時間変化に基づいて、搭載車両が走行している方向と走行した距離を特定することができる。
【0020】
経路案内装置1の制御部10は、記憶部11に記憶された地図データや上記のようにして算出した搭載車両の現在位置が変化した軌跡などに基づいて、搭載車両がどの道路の上に存在するかを特定する。このような処理をマップマッチング処理という。
【0021】
図1のジャイロセンサ15は、搭載車両の向きの変化に応じた角速度を検出するためのセンサである。このジャイロセンサ15により検出された角速度に基づいて、搭載車両の向きが求められ、搭載車両が走行している方向を特定できる。
【0022】
搭載車両がトンネル内を走行しているときや、高架下にあるサービスエリア内にあるときなど、GPS受信部14がGPS信号を受信できない場合がある。制御部10は、ジャイロセンサ15により検出される角速度、搭載車両からハーネスや無線通信等を介して送信される搭載車両の走行速度、および記憶部11に記憶される地図データに基づいて、搭載車両の現在位置および走行している方向に関する情報を特定することもできる。このようにして特定された搭載車両の現在位置の軌跡に基づいてもマップマッチング処理を実行することができる。GPS信号に基づいたマップマッチング処理と、角速度や走行速度等に基づいたマップマッチング処理とは併用することができる。
【0023】
図1の入力装置16は、経路案内装置1を動作させるためにユーザから入力される各種操作を検出するための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地名等を入力したり、予め登録された登録地の中から目的地を選択したり、表示モニタ12に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ12と一体化されたタッチパネルとしてもよい。
【0024】
本実施の形態では、前述の経路探索処理を行うとき、新設された道路の移動コストを従来よりも低くなるように補正する。新設された道路の移動コストの補正について図3を用いて説明する。
【0025】
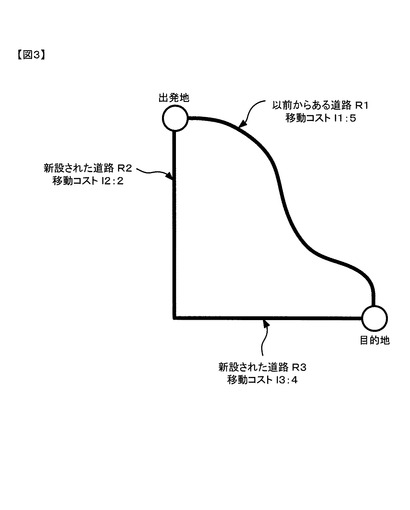
図3は、新設された道路を含む道路地図の一例である。図3では、出発地と目的地との間に三本の道路R1〜R3が存在する。道路R1は、出発地から目的地までの間を直接つなぐ道路であるが、新設された道路ではない。道路R2およびR3は、新しく整備された道路であって、道路R2、道路R3の順に通過することによって目的地に到達することができる。
【0026】
図3では、出発地から目的地まで到達するまでの経路は、道路R1を通る経路と、道路R2およびR3を通る経路の二つが存在する。ダイクストラ法などに基づいた経路探索処理を実行すると、考えられる複数の経路の中から出発地から目的地までに通過する道路の移動コストの和が最小となるものが出力される。以降、出発地から経路上の各地点までに通過する道路の移動コストの総和を到達コストと記載し、推奨経路は到達コストが最小となる経路を指すこととする。
【0027】
図3の道路R1〜R3のリンク長をそれぞれl1〜l3とすると、各リンク長l1〜l3に基づいて道路R1〜R3の移動コストがそれぞれ算出される。たとえば、図3では、道路R1〜R3の移動コストとして、それぞれ5,2,4の値が求められている。従来の新設された道路の移動コストの補正を行わない方法では、道路R1を通る経路の到達コストは5、道路R2およびR3を通る経路の到達コストは6(=2+4)となる。したがって、従来の経路探索処理では、道路R1を通る経路が推奨経路として出力される。
【0028】
一方、本実施の形態における経路探索処理では、新設された道路の移動コストを低減する補正を行う。たとえば、新設された道路R2およびR3にそれぞれ新設係数0.8を乗じる補正を行う。この場合、道路R2およびR3を通る経路の到達コストは4.8(=2×0.8+4×0.8)となり、道路R1を通る経路の到達コストである5よりも小さくなる。したがって、道路R2およびR3を通る経路が推奨経路として出力される。
【0029】
本実施の形態では、新設された道路の移動コストに対して補正を行う。補正に用いる新設係数は、経験的に定められた定数であってもよいし、道路が作られてからの時間経過に伴って1に近づく変数としてもよい。
【0030】
本実施の形態では、新設された道路であるか、すなわち補正の対象となる道路であるかは、地図データに基づいて判定する。その判定方法について図4を用いて説明する。図4(a)は、図3の道路地図をノードN1〜N3およびリンクL1〜L3を用いて表現したものである。リンクL1〜L3は、それぞれ道路R1〜R3を表している。ノードN1は、図3の出発地に対応している。ノードN3は、図3の目的地に対応している。ノードN2は、道路R2と道路R3とを接続する地点に対応している。
【0031】
図4(b)は、図4(a)のリンクL1〜L3に関する情報が記憶部11に記憶されている様子を示している。図4(b)の地図データ40は、差分更新における地図データの更新分42がオリジナルの地図データ41とは区別して記憶されている。リンクL1のデータは、オリジナルの地図データ41に記憶されているものとし、リンクL2およびL3の地図データは、地図データの更新分42に記憶されているものとする。地図データの更新分42に含まれるリンクに関する情報には、オリジナルの地図データ41にも含まれる情報に加えて、「低減期間終了日」という情報401が追加される。
【0032】
低減期間終了日401は、道路が新設された日付に基づいた情報であり、前述した新設された道路に対する補正を行う期間の終了日を表す。図4(b)の例では、図3の道路R2およびR3をそれぞれ表す図4(a)のリンクL2およびL3に対しては20XX年YY月ZZ日に補正を行う期間が終了することを表している。なお、補正に用いる新設係数を時間経過に伴って変化させる場合は、この低減期間終了日とGPS信号に基づいて算出した現在日時とに基づいて新設係数を算出すればよい。
【0033】
低減期間終了日402に基づいた補正を行うか否かの判定は、各リンクの移動コストを参照するときに実行される。経路探索処理において、各リンクの移動コストが参照されるタイミングについて図5を用いて説明する。
【0034】
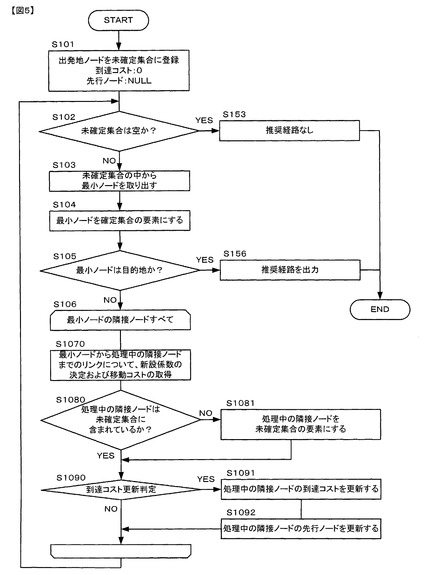
図5は、ダイクストラ法に基づいた経路探索処理に対して、新設された道路の補正に関する処理を追加したフローチャートである。図5の経路探索処理は、出発地のノードと目的地のノードを入力とし、出発地から目的地までの推奨経路と到達コストを出力する。なお、以降の図5のフローチャートの説明では、説明を簡単にするため、出発地および目的地はノードの上にあるものとする。
【0035】
図5のフローチャートの処理では、未確定集合と確定集合というノードの集合を用いる。確定集合とは、出発地からそのノードまでの到達コストと最短経路が確定したノードを要素とする集合である。未確定集合とは、出発地から目的地までの到達コストと最短経路とが確定するまでの処理において参照されたノードであって、確定集合に含まれないノードを要素とする集合である。なお、図5の処理が開始するとき、確定集合も未確定集合も空集合である。
【0036】
経路探索処理においてノードが参照されると、参照されたノードはまず未確定集合の要素となる。制御部10は、未確定集合の要素となったノードに対して、到達コストと先行ノードという二つの情報を生成する。生成された到達コストと先行ノードの値は、各ノードが未確定集合の要素である間は逐次更新され、確定集合の要素となったときに確定する。先行ノードとは、到達コストが記憶された時点での出発地から各ノードまでの最短経路において、各ノードに到達する一つ前のノードである。たとえば、図4(a)において、ノードN3の最短経路がノードN1,N2,N3の順に到達するものであった場合、ノードN3の先行ノードはノードN2であり、ノードN2の先行ノードはノードN1である。
【0037】
ダイクストラ法に基づいた経路探索処理では、各ノードに対応した到達コストおよび最短経路は、出発地に近いノードから順番に確定する。未確定集合の要素であるノードについての到達コストおよび最短経路が確定したとき、そのノードは未確定集合から取り出され、確定集合の要素として記憶される。目的地のノードが確定集合の要素となったとき、先行ノードに基づいて目的地から出発地に向かって確定集合に含まれるノードを辿ることにより推奨経路が得られる。
【0038】
地図データに含まれるノードからは1以上のリンクが延びており別のノードに接続されている。以降、ノードから延びるリンクに接続されている別のノードのことを隣接ノードと記載する。たとえば、図4(a)の場合、ノードN1からリンクL2およびL3が延びているため、ノードN1の隣接ノードはノードN2およびN3である。
【0039】
図5のステップS101では、制御部10は、出発地のノードを未確定集合の要素とする。このとき、出発地のノードの到達コストは0とし、先行ノードはNULL(空情報)とする。出発地のノードを未確定集合の要素とする処理が完了したら、図5の処理はステップS102に進む。
【0040】
図5のステップS102では、制御部10は、未確定集合が空集合か否かを判定する。図5の処理は、未確定集合が空集合の場合はステップS153に進み、そうでない場合はステップS103に進む。
【0041】
図5のステップS103では、制御部10は、未確定集合の中から到達コストが最も小さいノードである最小ノードを取り出す。取り出したノードは、未確定集合の中から削除し、削除が完了したらステップS104に進む。
【0042】
図5のステップS104では、制御部10は、ステップS103で最小ノードとして取り出したノードを確定集合に加える。最小ノードが確定集合の要素となったら図5の処理はステップS105に進む。
【0043】
図5のステップS105では、制御部10は、最小ノードが目的地か否かを判定する。図5の処理は、最小ノードが目的地である場合はステップS156に進み、そうでない場合はステップS106に進む。
【0044】
図5のステップS106では、制御部10は、最小ノードの隣接ノードの各々について逐次にステップS1070以降の処理を繰り返す。
【0045】
図5のステップS1070では、制御部10は、最小ノードと処理中の隣接ノードの間のリンクについて、地図データに基づいて低減期間終了日と移動コストを取得し、新設された道路の移動コストの補正に用いる新設係数を算出する。当該リンクがオリジナルの地図データ41に含まれる場合は、低減期間終了日が取得できないため係数を1とする。係数の算出が完了したら、図5の処理はステップS1080に進む。
【0046】
図5のステップS1080では、制御部10は、処理中の隣接ノードが未確定集合の中に含まれるか否かを判定する。図5の処理は、当該隣接ノードが未確定集合に含まれる場合はステップS1090に進み、そうでない場合はステップS1081に進む。
【0047】
図5のステップS1081では、制御部10は、処理中の隣接ノードを未確定集合の要素に加える。このとき、処理中の隣接ノードの先行ノードはNULLとし、その到達コストは到達コストとして設定し得る最大の値とする。当該隣接ノードを未確定集合に含めたら、図5の処理はステップS1090に進む。
【0048】
図5のステップS1090では、制御部10は、下記の判定式(1)を評価する。図5の処理は、判定式(1)が肯定判定されたら処理中の隣接ノードの到達コストを緩和するためにステップS1091に進む。一方、判定式(1)が否定判定された場合は、処理中の隣接ノードの処理を終了し、ステップS106に進み、次の隣接ノードの処理を開始する。最小ノードの隣接ノードすべてについて処理が終了した場合は、ステップS102に戻る。判定式(1)において、Cadjは処理中の隣接ノードの到達コスト、Cminは最小ノードの到達コスト、ladjは最小ノードと当該隣接ノードとの間のリンクの移動コストである。
【0049】
【数1】

―――(1)
【0050】
図5のステップS1091では、制御部10は、処理中の隣接ノードの到達コストをCmin+ladjに更新する。処理中の隣接ノードの到達コストを変更したら、図5の処理はステップS1092に進む。
【0051】
図5のステップS1092では、制御部10は、処理中の隣接ノードの先行ノードを最小ノードに更新する。処理中の隣接ノードの先行ノードを更新したら、処理中の隣接ノードの処理を終了し、ステップS106に進み、次の隣接ノードの処理を開始する。全ての隣接ノードについて処理が終了したらステップS102に戻る。
【0052】
図5の処理がステップS153に到った場合、制御部10は、目的地までの経路が存在しない、すなわち推奨経路を出力できないと判断する。図5の処理がステップS153に到った場合、制御部10は、図5の処理を終了させる。なお、ステップS153において制御部10は、図5の処理を終了させる前に表示モニタ12などを介して目的地に到達する経路がないことをユーザに報知することが望ましい。
【0053】
図5のステップS156では、制御部10は、先行ノードに基づいて推奨経路を出力し、図5の処理を終了する。
【0054】
図5のフローチャートの処理の具体例として、図4(a)の地図データに対して処理を適用した場合について図6〜図18を用いて説明する。
【0055】
図5のステップS101では、制御部10は、出発地のノードN1を未確定集合の要素とする。ノードN1の到達コストおよび先行ノードは、それぞれ0およびNULLとする。ステップS101が終了した時点の各データの状況を図6に図示する。
【0056】
出発地が未確定集合に含まれているため、ステップS102は否定判定され、図5の処理はステップS103に進む。ステップS103では、制御部10は、未確定集合の中から最小ノードとしてノードN1を取り出す。ステップS104では、制御部10は、ノードN1を確定集合の要素にする。ステップS104が終了した時点の各データの状況を図7に図示する。
【0057】
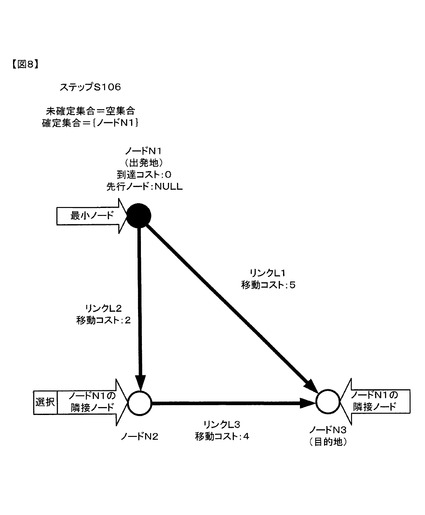
ノードN1は目的地ではないため、ステップS105は否定判定され、ステップS106に進む。最小ノードであるノードN1からはリンクL1およびL2がノードN3およびN2に向かって延びている。すなわち、ノードN1の隣接ノードはノードN2およびN3である。ステップS106の処理が開始した時点の各データの状況を図8に示す。
【0058】
ステップS106では、たとえばノードN2が選択されてステップS1070以降の処理を開始する。最小ノードN1とその隣接ノードN2の間のリンクL2の低減期間終了日は、図4(b)にあるように20XX年YY月ZZ日である。図5のステップS1070では現在時刻が20XX年YY月ZZ日より前、すなわち低減期間が終了する前であれば、リンクL2は補正の対象となる新設された道路であるので、リンクL2に対する新設係数はたとえば0.8と決定される。
【0059】
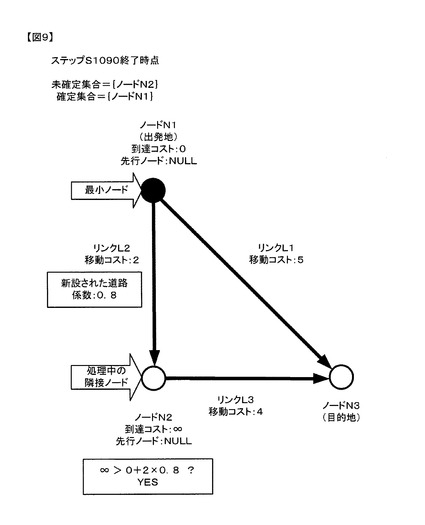
ステップS1080では、処理中の接続ノードN2が未確定集合に含まれていないため否定判定され、ステップ1081に進む。ステップS1081では、処理中の隣接ノードN2を未確定集合の要素にする。このとき、処理中の隣接ノードN2の到達コストは取りうる最大の値(ここでは仮に∞とする)とし、先行ノードはNULLとする。
【0060】
経路探索処理は、ステップS1090に移り、処理中の隣接ノードN2について判定式(1)を評価する。処理中の隣接ノードN2に関しては∞>0+2×0.8であるため、判定式(1)が肯定判定され、ステップS1091に進む。ステップS1090の処理が終了した時点の各データの状況を図9に示す。
【0061】
ステップS1091では、処理中の隣接ノードN2の到達コストを1.6(=0+2×0.8)に変更する。ステップS1092では、処理中の隣接ノードN2の先行ノードをノードN1に変更する。これにより最小ノードN1の隣接ノードのうち、ノードN2に関する処理を終了する。ステップS1092の処理が終了した時点の各データの状況を図10に示す。
【0062】
最小ノードN1の隣接ノードは、N2のほかにN3があるため、ノードN3の処理を開始する。ステップS1070(2回目)では、最小ノードN1とその隣接ノードN3の間のリンクL1は、新設された道路ではないため、補正に用いる係数を1とする。
【0063】
ステップS1080(2回目)では、処理中の接続ノードN3が未確定集合に含まれていないため否定判定され、ステップ1081に進む。ステップS1081(2回目)では、処理中の隣接ノードN3を未確定集合の要素にする。このとき、処理中の隣接ノードN3の到達コストは取りうる最大の値とし、先行ノードはNULLとする。
【0064】
ステップS1090(2回目)では、処理中の隣接ノードN3について判定式(1)を評価する。処理中の隣接ノードN3に関しては∞>0+5×1であるため、判定式(1)が肯定判定され、ステップS1091に進む。ステップS1090(2回目)の処理が終了した時点の各データの状況を図11に示す。
【0065】
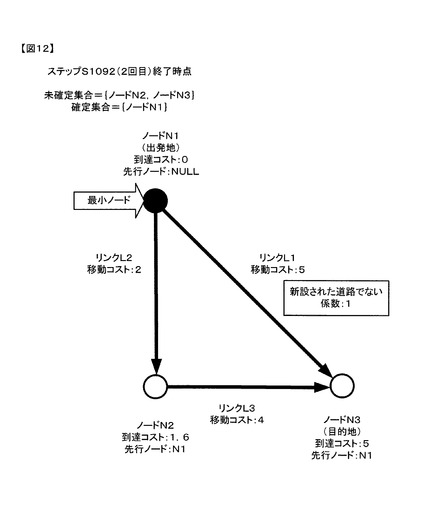
ステップS1091(2回目)では、処理中の隣接ノードN3の到達コストを5(=0+5×1)に変更する。ステップS1092(2回目)では、処理中の隣接ノードN3の先行ノードをノードN1に変更する。ステップS1092(2回目)終了した時点の各データの状況を図12に示す。
【0066】
最小ノードN1の隣接ノードN2およびN3に関する処理が共に終了したので、ステップS102に戻る。ノードN2およびN3が未確定集合に含まれているため、ステップS102(2回目)は否定判定され、ステップS103に進む。ステップS103(2回目)では、ノードN2の到達コスト1.6がノードN3の到達コスト5よりも小さいため、制御部10は未確定集合の中から最小ノードとしてノードN2を取り出す。ステップS104(2回目)では、制御部10はノードN2を確定集合の要素にする。ステップS104(2回目)終了した時点の各データの状況を図13に示す。
【0067】
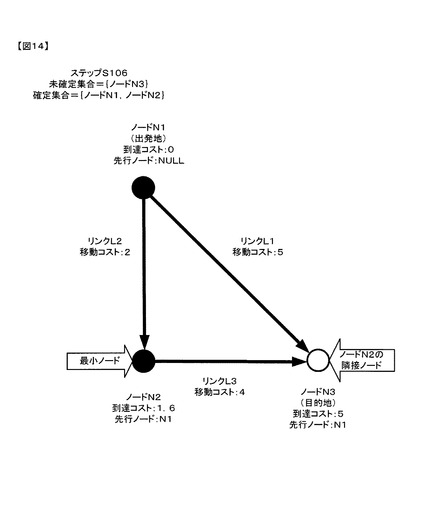
ノードN2は目的地ではないため、ステップS105では否定判定され、ステップS106に進む。最小ノードであるノードN2からはリンクL3がノードN3に向かって延びている。すなわち、ノードN2の隣接ノードはノードN3である。ステップS106では、隣接ノードとしてノードN3が選択されてステップS1070以降の処理を開始する。ステップS106の処理を開始した時点の各データの状況を図14に示す。
【0068】
リンクL3の低減期間終了日は、図4(b)にあるように20XX年YY月ZZ日である。ステップS1070(3回目)では、リンクL2と同様にリンクL3が補正の対象となる新設された道路と判断され、リンクL3に対する係数はたとえば0.8と決定される。
【0069】
ステップS1080(3回目)では、処理中の接続ノードN3が未確定集合に含まれているため肯定判定され、ステップ1090に進む。
【0070】
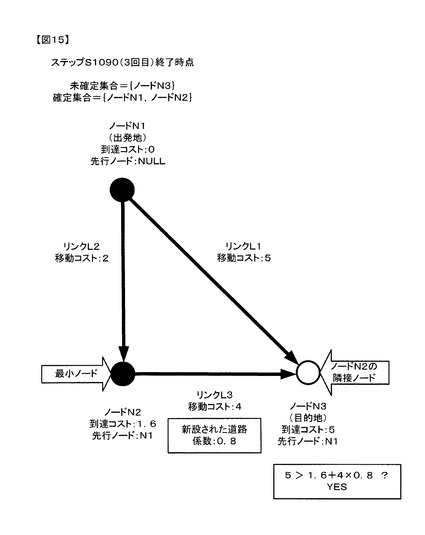
ステップS1090(3回目)では、処理中の隣接ノードN3について判定式(1)を評価する。処理中の隣接ノードN3に関しては5>1.6+4×0.8であるため、判定式(1)が肯定判定され、ステップS1091に進む。ステップS1090(3回目)終了時点の各データの状況を図15に示す。
【0071】
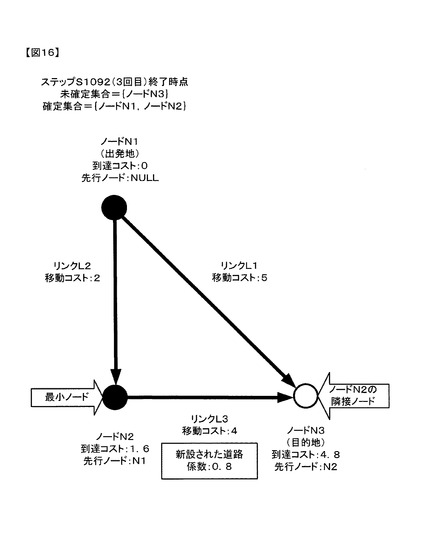
ステップS1091(3回目)では、処理中の隣接ノードN3の到達コストを4.8(=1.6+4×0.8)に変更する。ステップS1092(3回目)では、処理中の隣接ノードN3の先行ノードをノードN2に変更する。これにより最小ノードN2の隣接ノードに関する処理が終了したので、ステップS102に戻る。ステップS1092(3回目)終了時点の各データの状況を図16に示す。
【0072】
ノードN3が未確定集合に含まれているため、ステップS102(3回目)は否定判定され、ステップS103に進む。ステップS103(3回目)では、制御部10は未確定集合の中から最小ノードとしてノードN3を取り出す。ステップS104(3回目)では、制御部10はノードN3を確定集合の要素にする。ステップS104(3回目)終了時点の各データの状況を図17に示す。
【0073】
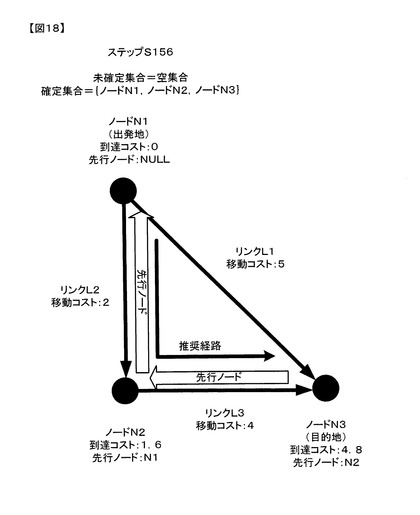
ノードN3は目的地であるため、ステップS105では肯定判定され、ステップS156に進む。ステップS156では、図18のように、目的地のノードN3から出発地のノードN1まで先行ノードを辿り、その結果に基づいてノードN1,ノードN2,ノードN3という推奨経路を出力する。
【0074】
以上で説明した実施形態によれば、次の作用効果を奏する。
【0075】
本実施の形態の経路案内装置1の記憶部11には、道路の移動コストに関する情報と新設された道路の移動コストを補正する期間である低減期間終了日とが含まれる地図データが記憶されている(図4(b))。そして、新設された道路に設定された低減期間終了日よりも現在時刻が前である場合は、新設された道路の移動コストを低減する補正を行い(図5のステップS1070)、ユーザが入力装置12を介して特定した目的地に到達するまでの移動コストが少ない経路を特定する(図5)。そして、特定された推奨経路に基づいて経路案内を行う。これにより、新設された道路の利点を考慮した経路案内ができる。
【0076】
以上で説明した実施形態は、以下のように変形して実施できる。
【0077】
(1)本実施の形態では、低減期間終了日に関する情報を地図データの更新分42だけに含めているが、オリジナルの地図データ41にも含めてよい。また、地図データの更新分42の更新日を記憶しておき、その更新日に基づいて低減期間終了日を定めてもよい。
【0078】
(2)本実施の形態では、移動コストの算出にリンク長を使用したが、他の情報に基づいて移動コストを算出してもよい。たとえば、旅行時間に基づいて算出してもよい。
【0079】
(3)本実施の形態では、移動コストをリンク長と評価値の乗算により算出したが、乗算結果を予め地図データに記憶してもよい。
【0080】
(4)本実施の形態では、経路探索処理の一例としてダイクストラ法を基にした処理を提示したが、リンクに関する情報に基づいた移動コストが最も小さくなる経路を出力できるものであればこれに限定するものではない。たとえば、ベルマン・フォード法に基づいた処理でもよい。
【0081】
以上で説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【符号の説明】
【0082】
1 経路案内装置
10 制御部
11 記憶部
12 表示モニタ
13 スピーカ
14 GPS受信部
15 ジャイロセンサ
16 入力装置
20 評価値表
40 地図データ
401 低減期間終了日
【技術分野】
【0001】
本発明は、経路案内装置に関する。
【背景技術】
【0002】
従来、地図データを差分更新する経路案内装置が知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−249624号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
新設された道路は、その存在の周知度が低いために交通量が少なかったり、表面の凹凸が少なかったりするため、車両の走行が円滑になされる。従来技術では、地図データが更新され、新設された道路が地図データに追加されたとしても、新設された道路の利点を十分に考慮した経路案内ができないおそれがあった。
【課題を解決するための手段】
【0005】
本発明の経路案内装置は、道路の移動コストに関する情報を含む道路情報を記憶する道路情報記憶手段と、道路情報における各道路の移動コストのうち新設された道路の移動コストを低減するコスト低減手段と、目的地を特定する目的地特定手段と、道路情報における移動コストおよびコスト低減手段により低減された移動コストに基づいて、目的地に到達するまでの移動に要する移動コストが小さい経路を特定する経路特定手段と、経路特定手段により特定される経路に従って車両を案内する経路案内手段とを備えることを特徴とする。
【発明の効果】
【0006】
新設された道路の利点を考慮した経路案内ができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態である経路案内装置の構成の一例である。
【図2】本発明の一実施形態において使用する道路の評価値について説明するための図である。
【図3】本発明が注目する新設された道路に関して説明するための図である。
【図4】本発明の一実施形態における地図データについて説明するための図である。
【図5】本発明の一実施形態である経路案内装置における経路探索処理の一例を示すフローチャートである。
【図6】本発明の一実施形態における経路探索処理について説明するための図である。
【図7】本発明の一実施形態における経路探索処理について説明するための図である。
【図8】本発明の一実施形態における経路探索処理について説明するための図である。
【図9】本発明の一実施形態における経路探索処理について説明するための図である。
【図10】本発明の一実施形態における経路探索処理について説明するための図である。
【図11】本発明の一実施形態における経路探索処理について説明するための図である。
【図12】本発明の一実施形態における経路探索処理について説明するための図である。
【図13】本発明の一実施形態における経路探索処理について説明するための図である。
【図14】本発明の一実施形態における経路探索処理について説明するための図である。
【図15】本発明の一実施形態における経路探索処理について説明するための図である。
【図16】本発明の一実施形態における経路探索処理について説明するための図である。
【図17】本発明の一実施形態における経路探索処理について説明するための図である。
【図18】本発明の一実施形態における経路探索処理について説明するための図である。
【発明を実施するための形態】
【0008】
本発明の一実施の形態による経路案内装置の構成について、図1を用いて説明する。図1の経路案内装置1は、制御部10、記憶部11、表示モニタ12、スピーカ13、GPS受信部14、ジャイロセンサ15、および入力装置16を備える。経路案内装置1は、車両と有線または無線で接続されており、車両の走行速度などの情報を取得することができる。経路案内装置1は、ブラケットや吸盤などにより車両などに固定してもよい。以降、経路案内装置1を搭載した車両のことを搭載車両と記載する。
【0009】
図1の制御部10は、経路案内装置1を動作させるための各種処理を実行するための部分であり、マイクロプロセッサ、各種周辺回路、RAM、ROMなどによって構成される。制御部10により実行される処理には、たとえば経路探索処理や、マップマッチング処理、経路案内処理などがある。これらの処理については、多くの手法が公知となっている。
【0010】
制御部10が実行する経路探索処理とは、予め設定された探索条件に基づいて、搭載車両の現在位置などの出発地から目的地までの推奨経路を探索するものである。目的地は、経路案内装置1の利用者が入力装置16を介して入力すればよい。搭載車両の現在位置は、制御部10がGPS受信部14を利用して算出することにより特定できる。経路の探索は、記憶部11に記憶されている地図データに基づいて実行される。なお、推奨経路を探索するとき、目的地だけでなく経由地を選択することとしてもよい。また、出発地は、搭載車両の現在位置だけでなくユーザが入力装置16を介して入力したものを用いてもよい。
【0011】
探索条件は、従来から様々なものが知られており、たとえば目的地に到達するまでに要する移動コストが最も少ない経路を探索するものなどがある。以降の説明では、経路探索処理の探索条件が移動コストの最も少ない経路を探索するものに設定されているものとする。
【0012】
制御部10が実行する経路案内処理とは、経路探索処理により探索された推奨経路に沿って運転手が搭載車両を運転できるように、表示モニタ12やスピーカ13などを利用して運転手に案内を行う処理である。制御部10は、表示モニタ12に搭載車両の位置を示す印を付した地図を表示し、スピーカ13から音声案内を出力する。
【0013】
図1の記憶部11は、ハードディスクなどを含む記憶媒体の集まりであり、道路地図を表す地図データや、アイコン等の画像データ、音声データを含む各種データが記憶されている。記憶部11に記憶されているデータは、必要に応じて制御部10により記憶部11から読み出され、制御部10が実行する様々な処理や制御に利用される。
【0014】
記憶部11に記憶される地図データには、地図上の地点を表すノードに関する情報と、ノードが表す地点と地点の間を繋ぐ道路を表すリンクに関する情報とが含まれる。ノードに関する情報には、位置情報や地点名称に関する情報などが含まれる。リンクに関する情報には、リンクが表す道路の長さであるリンク長や、道路種別、車両の通行が許可されている方向などの情報が含まれる。これらの情報に基づいて経路探索処理や、マップマッチング処理、経路案内処理などが実行される。
【0015】
各リンクを通過するのに要する移動コストは、リンクに関する情報に基づいて算出される。たとえば、各リンクのリンク長に図2に示す評価値を乗ずることにより算出することができる。図2の評価値表20は、リンクの道路種別にそれぞれ対応するリンクの評価値を示したものである。たとえば、リンクの道路種別が「国道」の「本線」の場合は評価値「60」であり、「一般道」の「本線」は評価値「100」である。すなわち、一般道の本線は国道の本線とリンク長が同じであっても、移動コストは国道の本線の5/3倍となる。
【0016】
制御部10は、記憶部11に新たなデータを記憶することや既に記憶されている地図データなどのデータを更新することができる。たとえば、新しく道路が作られた場合、新しいノードに関する情報やリンクに関する情報を地図データに追加することができる。地図データの更新方法には、HDD11に記憶している地図データと最新の地図データとの差分を更新する方法や、地図データファイルを置き換える方法などがある。地図データの更新に用いるデータは、DVD(図示せず)やUSBメモリ(図示せず)などの電子メディアから取得してもよいし、ナビゲーション装置1の外部からダウンロードすることにより取得してもよい。本実施の形態では、地図データの差分更新により新設された道路に関するノードやリンクの情報を地図データに追加する。追加した地図データの具体例については後述する。
【0017】
図1の表示モニタ12は、様々な画像や映像などを表示するための装置であり、液晶ディスプレイ等が用いられる。制御部10の制御に基づいて表示モニタ12に地図や搭載車両の現在位置を表示することにより、経路案内装置1は搭載車両を誘導する案内表示を行うことができる。
【0018】
図1のスピーカ13は、制御部10の制御により、搭載車両の走行に関する様々な音声情報を出力する。たとえば、制御部10により探索された経路に従って搭載車両を目的地まで案内するための案内用の音声や、警告音などを出力する。
【0019】
図1のGPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、搭載車両の現在位置と現在日時を特定するための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、制御部10は、所定数以上のGPS衛星からのGPS信号により、これらの情報に基づいて搭載車両の現在位置および現在日時を算出することができる。制御部10は、GPS信号に基づいて算出された搭載車両の現在位置の時間変化を算出し、その搭載車両の現在位置の時間変化に基づいて、搭載車両が走行している方向と走行した距離を特定することができる。
【0020】
経路案内装置1の制御部10は、記憶部11に記憶された地図データや上記のようにして算出した搭載車両の現在位置が変化した軌跡などに基づいて、搭載車両がどの道路の上に存在するかを特定する。このような処理をマップマッチング処理という。
【0021】
図1のジャイロセンサ15は、搭載車両の向きの変化に応じた角速度を検出するためのセンサである。このジャイロセンサ15により検出された角速度に基づいて、搭載車両の向きが求められ、搭載車両が走行している方向を特定できる。
【0022】
搭載車両がトンネル内を走行しているときや、高架下にあるサービスエリア内にあるときなど、GPS受信部14がGPS信号を受信できない場合がある。制御部10は、ジャイロセンサ15により検出される角速度、搭載車両からハーネスや無線通信等を介して送信される搭載車両の走行速度、および記憶部11に記憶される地図データに基づいて、搭載車両の現在位置および走行している方向に関する情報を特定することもできる。このようにして特定された搭載車両の現在位置の軌跡に基づいてもマップマッチング処理を実行することができる。GPS信号に基づいたマップマッチング処理と、角速度や走行速度等に基づいたマップマッチング処理とは併用することができる。
【0023】
図1の入力装置16は、経路案内装置1を動作させるためにユーザから入力される各種操作を検出するための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地名等を入力したり、予め登録された登録地の中から目的地を選択したり、表示モニタ12に表示された地図を任意の方向にスクロールしたりすることができる。入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ12と一体化されたタッチパネルとしてもよい。
【0024】
本実施の形態では、前述の経路探索処理を行うとき、新設された道路の移動コストを従来よりも低くなるように補正する。新設された道路の移動コストの補正について図3を用いて説明する。
【0025】
図3は、新設された道路を含む道路地図の一例である。図3では、出発地と目的地との間に三本の道路R1〜R3が存在する。道路R1は、出発地から目的地までの間を直接つなぐ道路であるが、新設された道路ではない。道路R2およびR3は、新しく整備された道路であって、道路R2、道路R3の順に通過することによって目的地に到達することができる。
【0026】
図3では、出発地から目的地まで到達するまでの経路は、道路R1を通る経路と、道路R2およびR3を通る経路の二つが存在する。ダイクストラ法などに基づいた経路探索処理を実行すると、考えられる複数の経路の中から出発地から目的地までに通過する道路の移動コストの和が最小となるものが出力される。以降、出発地から経路上の各地点までに通過する道路の移動コストの総和を到達コストと記載し、推奨経路は到達コストが最小となる経路を指すこととする。
【0027】
図3の道路R1〜R3のリンク長をそれぞれl1〜l3とすると、各リンク長l1〜l3に基づいて道路R1〜R3の移動コストがそれぞれ算出される。たとえば、図3では、道路R1〜R3の移動コストとして、それぞれ5,2,4の値が求められている。従来の新設された道路の移動コストの補正を行わない方法では、道路R1を通る経路の到達コストは5、道路R2およびR3を通る経路の到達コストは6(=2+4)となる。したがって、従来の経路探索処理では、道路R1を通る経路が推奨経路として出力される。
【0028】
一方、本実施の形態における経路探索処理では、新設された道路の移動コストを低減する補正を行う。たとえば、新設された道路R2およびR3にそれぞれ新設係数0.8を乗じる補正を行う。この場合、道路R2およびR3を通る経路の到達コストは4.8(=2×0.8+4×0.8)となり、道路R1を通る経路の到達コストである5よりも小さくなる。したがって、道路R2およびR3を通る経路が推奨経路として出力される。
【0029】
本実施の形態では、新設された道路の移動コストに対して補正を行う。補正に用いる新設係数は、経験的に定められた定数であってもよいし、道路が作られてからの時間経過に伴って1に近づく変数としてもよい。
【0030】
本実施の形態では、新設された道路であるか、すなわち補正の対象となる道路であるかは、地図データに基づいて判定する。その判定方法について図4を用いて説明する。図4(a)は、図3の道路地図をノードN1〜N3およびリンクL1〜L3を用いて表現したものである。リンクL1〜L3は、それぞれ道路R1〜R3を表している。ノードN1は、図3の出発地に対応している。ノードN3は、図3の目的地に対応している。ノードN2は、道路R2と道路R3とを接続する地点に対応している。
【0031】
図4(b)は、図4(a)のリンクL1〜L3に関する情報が記憶部11に記憶されている様子を示している。図4(b)の地図データ40は、差分更新における地図データの更新分42がオリジナルの地図データ41とは区別して記憶されている。リンクL1のデータは、オリジナルの地図データ41に記憶されているものとし、リンクL2およびL3の地図データは、地図データの更新分42に記憶されているものとする。地図データの更新分42に含まれるリンクに関する情報には、オリジナルの地図データ41にも含まれる情報に加えて、「低減期間終了日」という情報401が追加される。
【0032】
低減期間終了日401は、道路が新設された日付に基づいた情報であり、前述した新設された道路に対する補正を行う期間の終了日を表す。図4(b)の例では、図3の道路R2およびR3をそれぞれ表す図4(a)のリンクL2およびL3に対しては20XX年YY月ZZ日に補正を行う期間が終了することを表している。なお、補正に用いる新設係数を時間経過に伴って変化させる場合は、この低減期間終了日とGPS信号に基づいて算出した現在日時とに基づいて新設係数を算出すればよい。
【0033】
低減期間終了日402に基づいた補正を行うか否かの判定は、各リンクの移動コストを参照するときに実行される。経路探索処理において、各リンクの移動コストが参照されるタイミングについて図5を用いて説明する。
【0034】
図5は、ダイクストラ法に基づいた経路探索処理に対して、新設された道路の補正に関する処理を追加したフローチャートである。図5の経路探索処理は、出発地のノードと目的地のノードを入力とし、出発地から目的地までの推奨経路と到達コストを出力する。なお、以降の図5のフローチャートの説明では、説明を簡単にするため、出発地および目的地はノードの上にあるものとする。
【0035】
図5のフローチャートの処理では、未確定集合と確定集合というノードの集合を用いる。確定集合とは、出発地からそのノードまでの到達コストと最短経路が確定したノードを要素とする集合である。未確定集合とは、出発地から目的地までの到達コストと最短経路とが確定するまでの処理において参照されたノードであって、確定集合に含まれないノードを要素とする集合である。なお、図5の処理が開始するとき、確定集合も未確定集合も空集合である。
【0036】
経路探索処理においてノードが参照されると、参照されたノードはまず未確定集合の要素となる。制御部10は、未確定集合の要素となったノードに対して、到達コストと先行ノードという二つの情報を生成する。生成された到達コストと先行ノードの値は、各ノードが未確定集合の要素である間は逐次更新され、確定集合の要素となったときに確定する。先行ノードとは、到達コストが記憶された時点での出発地から各ノードまでの最短経路において、各ノードに到達する一つ前のノードである。たとえば、図4(a)において、ノードN3の最短経路がノードN1,N2,N3の順に到達するものであった場合、ノードN3の先行ノードはノードN2であり、ノードN2の先行ノードはノードN1である。
【0037】
ダイクストラ法に基づいた経路探索処理では、各ノードに対応した到達コストおよび最短経路は、出発地に近いノードから順番に確定する。未確定集合の要素であるノードについての到達コストおよび最短経路が確定したとき、そのノードは未確定集合から取り出され、確定集合の要素として記憶される。目的地のノードが確定集合の要素となったとき、先行ノードに基づいて目的地から出発地に向かって確定集合に含まれるノードを辿ることにより推奨経路が得られる。
【0038】
地図データに含まれるノードからは1以上のリンクが延びており別のノードに接続されている。以降、ノードから延びるリンクに接続されている別のノードのことを隣接ノードと記載する。たとえば、図4(a)の場合、ノードN1からリンクL2およびL3が延びているため、ノードN1の隣接ノードはノードN2およびN3である。
【0039】
図5のステップS101では、制御部10は、出発地のノードを未確定集合の要素とする。このとき、出発地のノードの到達コストは0とし、先行ノードはNULL(空情報)とする。出発地のノードを未確定集合の要素とする処理が完了したら、図5の処理はステップS102に進む。
【0040】
図5のステップS102では、制御部10は、未確定集合が空集合か否かを判定する。図5の処理は、未確定集合が空集合の場合はステップS153に進み、そうでない場合はステップS103に進む。
【0041】
図5のステップS103では、制御部10は、未確定集合の中から到達コストが最も小さいノードである最小ノードを取り出す。取り出したノードは、未確定集合の中から削除し、削除が完了したらステップS104に進む。
【0042】
図5のステップS104では、制御部10は、ステップS103で最小ノードとして取り出したノードを確定集合に加える。最小ノードが確定集合の要素となったら図5の処理はステップS105に進む。
【0043】
図5のステップS105では、制御部10は、最小ノードが目的地か否かを判定する。図5の処理は、最小ノードが目的地である場合はステップS156に進み、そうでない場合はステップS106に進む。
【0044】
図5のステップS106では、制御部10は、最小ノードの隣接ノードの各々について逐次にステップS1070以降の処理を繰り返す。
【0045】
図5のステップS1070では、制御部10は、最小ノードと処理中の隣接ノードの間のリンクについて、地図データに基づいて低減期間終了日と移動コストを取得し、新設された道路の移動コストの補正に用いる新設係数を算出する。当該リンクがオリジナルの地図データ41に含まれる場合は、低減期間終了日が取得できないため係数を1とする。係数の算出が完了したら、図5の処理はステップS1080に進む。
【0046】
図5のステップS1080では、制御部10は、処理中の隣接ノードが未確定集合の中に含まれるか否かを判定する。図5の処理は、当該隣接ノードが未確定集合に含まれる場合はステップS1090に進み、そうでない場合はステップS1081に進む。
【0047】
図5のステップS1081では、制御部10は、処理中の隣接ノードを未確定集合の要素に加える。このとき、処理中の隣接ノードの先行ノードはNULLとし、その到達コストは到達コストとして設定し得る最大の値とする。当該隣接ノードを未確定集合に含めたら、図5の処理はステップS1090に進む。
【0048】
図5のステップS1090では、制御部10は、下記の判定式(1)を評価する。図5の処理は、判定式(1)が肯定判定されたら処理中の隣接ノードの到達コストを緩和するためにステップS1091に進む。一方、判定式(1)が否定判定された場合は、処理中の隣接ノードの処理を終了し、ステップS106に進み、次の隣接ノードの処理を開始する。最小ノードの隣接ノードすべてについて処理が終了した場合は、ステップS102に戻る。判定式(1)において、Cadjは処理中の隣接ノードの到達コスト、Cminは最小ノードの到達コスト、ladjは最小ノードと当該隣接ノードとの間のリンクの移動コストである。
【0049】
【数1】
―――(1)
【0050】
図5のステップS1091では、制御部10は、処理中の隣接ノードの到達コストをCmin+ladjに更新する。処理中の隣接ノードの到達コストを変更したら、図5の処理はステップS1092に進む。
【0051】
図5のステップS1092では、制御部10は、処理中の隣接ノードの先行ノードを最小ノードに更新する。処理中の隣接ノードの先行ノードを更新したら、処理中の隣接ノードの処理を終了し、ステップS106に進み、次の隣接ノードの処理を開始する。全ての隣接ノードについて処理が終了したらステップS102に戻る。
【0052】
図5の処理がステップS153に到った場合、制御部10は、目的地までの経路が存在しない、すなわち推奨経路を出力できないと判断する。図5の処理がステップS153に到った場合、制御部10は、図5の処理を終了させる。なお、ステップS153において制御部10は、図5の処理を終了させる前に表示モニタ12などを介して目的地に到達する経路がないことをユーザに報知することが望ましい。
【0053】
図5のステップS156では、制御部10は、先行ノードに基づいて推奨経路を出力し、図5の処理を終了する。
【0054】
図5のフローチャートの処理の具体例として、図4(a)の地図データに対して処理を適用した場合について図6〜図18を用いて説明する。
【0055】
図5のステップS101では、制御部10は、出発地のノードN1を未確定集合の要素とする。ノードN1の到達コストおよび先行ノードは、それぞれ0およびNULLとする。ステップS101が終了した時点の各データの状況を図6に図示する。
【0056】
出発地が未確定集合に含まれているため、ステップS102は否定判定され、図5の処理はステップS103に進む。ステップS103では、制御部10は、未確定集合の中から最小ノードとしてノードN1を取り出す。ステップS104では、制御部10は、ノードN1を確定集合の要素にする。ステップS104が終了した時点の各データの状況を図7に図示する。
【0057】
ノードN1は目的地ではないため、ステップS105は否定判定され、ステップS106に進む。最小ノードであるノードN1からはリンクL1およびL2がノードN3およびN2に向かって延びている。すなわち、ノードN1の隣接ノードはノードN2およびN3である。ステップS106の処理が開始した時点の各データの状況を図8に示す。
【0058】
ステップS106では、たとえばノードN2が選択されてステップS1070以降の処理を開始する。最小ノードN1とその隣接ノードN2の間のリンクL2の低減期間終了日は、図4(b)にあるように20XX年YY月ZZ日である。図5のステップS1070では現在時刻が20XX年YY月ZZ日より前、すなわち低減期間が終了する前であれば、リンクL2は補正の対象となる新設された道路であるので、リンクL2に対する新設係数はたとえば0.8と決定される。
【0059】
ステップS1080では、処理中の接続ノードN2が未確定集合に含まれていないため否定判定され、ステップ1081に進む。ステップS1081では、処理中の隣接ノードN2を未確定集合の要素にする。このとき、処理中の隣接ノードN2の到達コストは取りうる最大の値(ここでは仮に∞とする)とし、先行ノードはNULLとする。
【0060】
経路探索処理は、ステップS1090に移り、処理中の隣接ノードN2について判定式(1)を評価する。処理中の隣接ノードN2に関しては∞>0+2×0.8であるため、判定式(1)が肯定判定され、ステップS1091に進む。ステップS1090の処理が終了した時点の各データの状況を図9に示す。
【0061】
ステップS1091では、処理中の隣接ノードN2の到達コストを1.6(=0+2×0.8)に変更する。ステップS1092では、処理中の隣接ノードN2の先行ノードをノードN1に変更する。これにより最小ノードN1の隣接ノードのうち、ノードN2に関する処理を終了する。ステップS1092の処理が終了した時点の各データの状況を図10に示す。
【0062】
最小ノードN1の隣接ノードは、N2のほかにN3があるため、ノードN3の処理を開始する。ステップS1070(2回目)では、最小ノードN1とその隣接ノードN3の間のリンクL1は、新設された道路ではないため、補正に用いる係数を1とする。
【0063】
ステップS1080(2回目)では、処理中の接続ノードN3が未確定集合に含まれていないため否定判定され、ステップ1081に進む。ステップS1081(2回目)では、処理中の隣接ノードN3を未確定集合の要素にする。このとき、処理中の隣接ノードN3の到達コストは取りうる最大の値とし、先行ノードはNULLとする。
【0064】
ステップS1090(2回目)では、処理中の隣接ノードN3について判定式(1)を評価する。処理中の隣接ノードN3に関しては∞>0+5×1であるため、判定式(1)が肯定判定され、ステップS1091に進む。ステップS1090(2回目)の処理が終了した時点の各データの状況を図11に示す。
【0065】
ステップS1091(2回目)では、処理中の隣接ノードN3の到達コストを5(=0+5×1)に変更する。ステップS1092(2回目)では、処理中の隣接ノードN3の先行ノードをノードN1に変更する。ステップS1092(2回目)終了した時点の各データの状況を図12に示す。
【0066】
最小ノードN1の隣接ノードN2およびN3に関する処理が共に終了したので、ステップS102に戻る。ノードN2およびN3が未確定集合に含まれているため、ステップS102(2回目)は否定判定され、ステップS103に進む。ステップS103(2回目)では、ノードN2の到達コスト1.6がノードN3の到達コスト5よりも小さいため、制御部10は未確定集合の中から最小ノードとしてノードN2を取り出す。ステップS104(2回目)では、制御部10はノードN2を確定集合の要素にする。ステップS104(2回目)終了した時点の各データの状況を図13に示す。
【0067】
ノードN2は目的地ではないため、ステップS105では否定判定され、ステップS106に進む。最小ノードであるノードN2からはリンクL3がノードN3に向かって延びている。すなわち、ノードN2の隣接ノードはノードN3である。ステップS106では、隣接ノードとしてノードN3が選択されてステップS1070以降の処理を開始する。ステップS106の処理を開始した時点の各データの状況を図14に示す。
【0068】
リンクL3の低減期間終了日は、図4(b)にあるように20XX年YY月ZZ日である。ステップS1070(3回目)では、リンクL2と同様にリンクL3が補正の対象となる新設された道路と判断され、リンクL3に対する係数はたとえば0.8と決定される。
【0069】
ステップS1080(3回目)では、処理中の接続ノードN3が未確定集合に含まれているため肯定判定され、ステップ1090に進む。
【0070】
ステップS1090(3回目)では、処理中の隣接ノードN3について判定式(1)を評価する。処理中の隣接ノードN3に関しては5>1.6+4×0.8であるため、判定式(1)が肯定判定され、ステップS1091に進む。ステップS1090(3回目)終了時点の各データの状況を図15に示す。
【0071】
ステップS1091(3回目)では、処理中の隣接ノードN3の到達コストを4.8(=1.6+4×0.8)に変更する。ステップS1092(3回目)では、処理中の隣接ノードN3の先行ノードをノードN2に変更する。これにより最小ノードN2の隣接ノードに関する処理が終了したので、ステップS102に戻る。ステップS1092(3回目)終了時点の各データの状況を図16に示す。
【0072】
ノードN3が未確定集合に含まれているため、ステップS102(3回目)は否定判定され、ステップS103に進む。ステップS103(3回目)では、制御部10は未確定集合の中から最小ノードとしてノードN3を取り出す。ステップS104(3回目)では、制御部10はノードN3を確定集合の要素にする。ステップS104(3回目)終了時点の各データの状況を図17に示す。
【0073】
ノードN3は目的地であるため、ステップS105では肯定判定され、ステップS156に進む。ステップS156では、図18のように、目的地のノードN3から出発地のノードN1まで先行ノードを辿り、その結果に基づいてノードN1,ノードN2,ノードN3という推奨経路を出力する。
【0074】
以上で説明した実施形態によれば、次の作用効果を奏する。
【0075】
本実施の形態の経路案内装置1の記憶部11には、道路の移動コストに関する情報と新設された道路の移動コストを補正する期間である低減期間終了日とが含まれる地図データが記憶されている(図4(b))。そして、新設された道路に設定された低減期間終了日よりも現在時刻が前である場合は、新設された道路の移動コストを低減する補正を行い(図5のステップS1070)、ユーザが入力装置12を介して特定した目的地に到達するまでの移動コストが少ない経路を特定する(図5)。そして、特定された推奨経路に基づいて経路案内を行う。これにより、新設された道路の利点を考慮した経路案内ができる。
【0076】
以上で説明した実施形態は、以下のように変形して実施できる。
【0077】
(1)本実施の形態では、低減期間終了日に関する情報を地図データの更新分42だけに含めているが、オリジナルの地図データ41にも含めてよい。また、地図データの更新分42の更新日を記憶しておき、その更新日に基づいて低減期間終了日を定めてもよい。
【0078】
(2)本実施の形態では、移動コストの算出にリンク長を使用したが、他の情報に基づいて移動コストを算出してもよい。たとえば、旅行時間に基づいて算出してもよい。
【0079】
(3)本実施の形態では、移動コストをリンク長と評価値の乗算により算出したが、乗算結果を予め地図データに記憶してもよい。
【0080】
(4)本実施の形態では、経路探索処理の一例としてダイクストラ法を基にした処理を提示したが、リンクに関する情報に基づいた移動コストが最も小さくなる経路を出力できるものであればこれに限定するものではない。たとえば、ベルマン・フォード法に基づいた処理でもよい。
【0081】
以上で説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されない。
【符号の説明】
【0082】
1 経路案内装置
10 制御部
11 記憶部
12 表示モニタ
13 スピーカ
14 GPS受信部
15 ジャイロセンサ
16 入力装置
20 評価値表
40 地図データ
401 低減期間終了日
【特許請求の範囲】
【請求項1】
道路の移動コストに関する情報を含む道路情報を記憶する道路情報記憶手段と、
前記道路情報における各道路の移動コストのうち新設された道路の移動コストを低減するコスト低減手段と、
目的地を特定する目的地特定手段と、
前記道路情報における移動コストおよび前記コスト低減手段により低減された移動コストに基づいて、前記目的地に到達するまでの移動に要する移動コストが小さい経路を特定する経路特定手段と、
前記経路特定手段により特定される経路に従って車両を案内する経路案内手段とを備えることを特徴とする経路案内装置。
【請求項2】
請求項1に記載の経路案内装置において、
前記道路情報は、前記新設された道路を特定するための日付情報を更に含み、
前記コスト低減手段は、前記日付情報に基づいて、前記新設された道路を特定し、当該新設された道路の移動コストを低減することを特徴とする経路案内装置。
【請求項3】
請求項2に記載の経路案内装置において、
前記コスト低減手段は、前記日付情報に基づいて、前記新設された道路の移動コストを低減する期間を決定することを特徴とする経路案内装置。
【請求項4】
請求項3に記載の経路案内装置において、
現在日時を取得する現在日時取得手段を更に備え、
前記コスト低減手段は、前記現在日時が前記移動コストを低減する期間内である道路を新設された道路として特定することを特徴とする経路案内装置。
【請求項5】
請求項2から4のいずれか一項に記載の経路案内装置において、
前記コスト低減手段は、前記日付情報に基づいて、前記新設された道路の移動コストの低減量を時間経過に応じて変化させることを特徴とする経路案内装置。
【請求項6】
請求項2から5のいずれか一項に記載の経路案内装置において、
前記道路情報の一部を更新するための差分更新情報を他から取得する差分更新情報取得手段を更に備え、
前記日付情報は、前記差分更新情報に含まれることを特徴とする経路案内装置。
【請求項1】
道路の移動コストに関する情報を含む道路情報を記憶する道路情報記憶手段と、
前記道路情報における各道路の移動コストのうち新設された道路の移動コストを低減するコスト低減手段と、
目的地を特定する目的地特定手段と、
前記道路情報における移動コストおよび前記コスト低減手段により低減された移動コストに基づいて、前記目的地に到達するまでの移動に要する移動コストが小さい経路を特定する経路特定手段と、
前記経路特定手段により特定される経路に従って車両を案内する経路案内手段とを備えることを特徴とする経路案内装置。
【請求項2】
請求項1に記載の経路案内装置において、
前記道路情報は、前記新設された道路を特定するための日付情報を更に含み、
前記コスト低減手段は、前記日付情報に基づいて、前記新設された道路を特定し、当該新設された道路の移動コストを低減することを特徴とする経路案内装置。
【請求項3】
請求項2に記載の経路案内装置において、
前記コスト低減手段は、前記日付情報に基づいて、前記新設された道路の移動コストを低減する期間を決定することを特徴とする経路案内装置。
【請求項4】
請求項3に記載の経路案内装置において、
現在日時を取得する現在日時取得手段を更に備え、
前記コスト低減手段は、前記現在日時が前記移動コストを低減する期間内である道路を新設された道路として特定することを特徴とする経路案内装置。
【請求項5】
請求項2から4のいずれか一項に記載の経路案内装置において、
前記コスト低減手段は、前記日付情報に基づいて、前記新設された道路の移動コストの低減量を時間経過に応じて変化させることを特徴とする経路案内装置。
【請求項6】
請求項2から5のいずれか一項に記載の経路案内装置において、
前記道路情報の一部を更新するための差分更新情報を他から取得する差分更新情報取得手段を更に備え、
前記日付情報は、前記差分更新情報に含まれることを特徴とする経路案内装置。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】

【図7】

【図8】
【図9】
【図10】

【図11】

【図12】
【図13】

【図14】
【図15】
【図16】
【図17】

【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−257168(P2011−257168A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−129681(P2010−129681)
【出願日】平成22年6月7日(2010.6.7)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月7日(2010.6.7)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]